ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к дирижаблям, которые легче воздуха, в особенности, к дирижаблям для стратосферы.
УРОВЕНЬ ТЕХНИКИ В ОБЛАСТИ ИЗОБРЕТЕНИЯ
Недавние достижения в области лёгких и высокопрочных материалов пробудили интерес к созданию стратосферных дирижаблей. В частности, дирижабли, которые легче воздуха, для использования в стратосфере, привлекли внимание для использования в качестве важных средств для телекоммуникации и наблюдения. Однако условия в стратосфере предъявляют жёсткие требования к материалам. Кроме того, долговременное использование дирижаблей в стратосфере требует выработки энергии из солнечного света, что добавляет вес дирижаблю и, таким образом, задает жёсткие границы потенциальному подъемному весу, а также весу самого дирижабля, относительно размеров дирижабля. Увеличение размеров дирижабля преодолевает эту проблему, так как подъёмная сила увеличивается с объёмом, в то время как вес самого дирижабля увеличивается пропорционально площади поверхности. Однако большие дирижабли создают проблемы по отношению к стоимости и практичности. Проблема создания небольшого стратосферного дирижабля, практически, ещё не решена.
Общие сведения по дирижаблям можно найти в книге ”Технология Дирижабля” под авторством G.A.Khoury (“Airship Technology”, G.A.Khoury, Cambridge University Press 1999, второе издание 2012). Различные эксперименты по стратосферным дирижаблям продолжаются, например, в Aerostar International, филиале компании Raven Industries (http://ravenaerostar.com) и в сотрудничестве с Southwest Research Institute и US Air Force Lab. Другой активной компанией является Near Space 2
Corporation в Аризоне (http://www.nsc.aero). Проект The US Air Force ISIS project содержит стратосферный дирижабль с солнечными фотоэлементами.
Обзор программы компании Lockheed Martin по дирижаблям для больших высот (Lockheed Martin High Altitude Airship program) дан в опубликованной в Интернете публикации 2013г ”Состояние и планы программы по дирижаблям для больших высот” (Status and Plans of High Altitude Airship (HAA) Program под авторством Androulakakis и Jusy, опубликованной на http://enu.kz/repository/2013/AIAA-2013-1362.pdf.
В отношении конструкции дирижаблей существуют разные предложения. В то время как большие дирижабли двадцатого века имели внутренний каркас, в настоящее время существует, напротив, тенденция исключения каркасов для экономии веса. Как альтернатива, были предложены гибкие наружные каркасы, например в заявке на патент США 2006/192048 описывается спиральная намотка растяжимых лент, формирующих внешний лёгкий каркас, который используется для крепления энергетических блоков, гондол и хвостовых блоков. Идея строп вокруг основного корпуса для удерживания гондолы очень стара и была уже описана в патентном документе Франции № 417649 в 1910г. В отличие от гибких лент вокруг основного корпуса, в патенте США №8141814 фирмы Boing описана жёсткая рама вокруг мягкой конструкции дирижабля для двойного ротора, используемого согласно принципу вертолета, с силой тяги вверх.
Однако всё ещё существует потребность в усовершенствованиях. В особенности, существует потребность в практическом дешёвом техническом решении для малых стратосферных дирижаблей.
ОПИСАНИЕ / СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, целью предложенного изобретения является создание усовершенствований для дирижаблей, в особенности, малых стратосферных дирижаблей. Эта цель достигается с помощью дирижабля, описанного более подробно далее. 3
Дирижабль относится к типу, который наполнен газообразным гелием или водородом, так что дирижабль легче воздуха. Наполненный газом гибкий корпус образует мягкую оболочку, удлинённую вдоль продольной оси, с передней частью, имеющей передний конец, и задним концом в хвосте. Например, продольная ось является осью симметрии, и корпус имеет симметрию вращения относительно этой оси.
Строповая система вокруг корпуса используется для поддержки солнечных элементов, батарей, винтовых двигателей и электроники, чтобы не повредить корпус и, таким образом, минимизировать риски утечки. Соответственно, строповая система не проходит через материал корпуса, а только прилегает к внешней стороне корпуса.
Строповая система выполнена из гибкого материала или содержит гибкий материал как основной компонент системы для обеспечения возможности гибкой регулировки системы к форме корпуса, при этом материал не обязательно является растяжимым.
В некоторых вариантах строповая система содержит гибкую кольцевую ленту, которая проходит как кольцо вокруг корпуса и вокруг продольной оси. Кольцевая лента расположена на расстоянии от переднего конца, например, соответствующем от 25% до 50% полной длины корпуса, причем длина измеряется вдоль продольной оси.
В некоторых вариантах кольцевая лента не является растяжимой для предотвращения упругого давления на корпус и газовый объём внутри, в то же время, в других вариантах по меньшей мере часть кольцевой ленты выполнена упруго растяжимой для плотного прилегания ленты к корпусу даже тогда, когда корпус изменяет размер. Различные варианты служат различным задачам и зависят от требуемых условий. Для стратосферного дирижабля низкая температура окружающей среды должна быть принята во внимание при проектировании упруго растяжимой строповой системы, так как упругие материалы изменяют свойства при охлаждении.
Строповая система, например, кольцевая лента, или боковые полосы ленты, или то и другое используется для крепления и поддержки по меньшей 4
мере одного из следующего:
- винтовой двигатель или несколько винтовых двигателей,
- батареи,
- солнечные фотоэлементы, например, установленные на панели, в частности, на гибкой панели; и
- управляющий модуль для управления всей работой систем.
Например, батареи расположены в месте, находящемся на нижней стороне корпуса, когда он ориентирован в рабочем положении. Например, управление с помощью управляющего модуля включает процедуру зарядки, функционирование источника энергии и/или работу двигателя или двигателей, так же как управление рулями.
Обычно используются два винтовых двигателя, по одному на каждой стороне корпуса. Преимущественно, чтобы двигатели были расположены близко к строповой системе, например, на расстоянии от корпуса менее чем половина или даже менее чем четверть диаметра корпуса в месте расположения двигателя. Например, расстояние от корпуса до первого винтового двигателя на одной стороне корпуса меньше, чем половина или даже меньше, чем четверть расстояния от первого воздушного винта до второго воздушного винта на другой стороне корпуса. Например, расстояние от корпуса до винта меньше, чем удвоенный размер винта.
Управление рулями может выполняться регулируемыми по направлению хвостовыми стабилизаторами или боковыми стабилизаторами. Для лёгких дирижаблей, однако, стабилизаторы могут быть не регулируемыми, а фиксированными по направлению, обеспечивая возможность их крепления к корпусу с помощью клея. В альтернативном случае стабилизаторы прикреплены к строповой системе. В случае, когда стабилизаторы не являются регулируемыми, винтовые двигатели, преимущественно, выполнены с возможностью регулировки по углу для направления тяги слегка вверх или вниз, при перемещении вперёд.
Как вариант, строповая система содержит гибкие боковые ленты. Например, они прикреплены к кольцевой ленте и проходят вдоль внешней 5
стороны корпуса от кольцевой ленты к хвосту корпуса, например к заднему концу. Обычно боковые ленты расположены симметрично на противоположных сторонах корпуса. Как вариант, боковые ленты являются нерастяжимыми для обеспечения стабильности формы строповой системы. Так как хвост, особенно задний конец, у же средней части корпуса, в которой, преимущественно, расположена кольцевая лента, направленная вперед тяга, создаваемая двигателями на строповой системе, не будет приводить к соскальзыванию с корпуса, а будет тянуть хвост вместе с кольцевой лентой.
В некоторых вариантах электрические проводники интегрированы в материал строповой системы, например, боковые полосы, или кольцевую ленту, или в обе эти части, для проведения электрического тока. Электрические проводники используются, например, для одного из следующих соединений:
- между солнечными фотоэлементами и батареями,
- между батареями и двигателями,
- между солнечными фотоэлементами и двигателями.
Предпочтительно, солнечные фотоэлементы, например, на панели солнечных фотоэлементов, батареи и винтовой двигатель (двигатели) электрически соединены электрическими проводниками, интегрированными в шибкий материал строповой системы. В особенности, в случае, когда материал строповой системы, например включающей боковые полосы, или кольцевую ленту, или то и другое, является текстильным материалом, содержащим волокна, по выбору тканые или переплетенные. В этом случае электрические проводники, потенциально, представляют часть материала, например, переплетенные с вязаными волокнами или вшитыми или встроенными в материал. В альтернативном случае проводники напечатаны или нанесены в виде пленки на материал строповой системы, например, боковые полосы и/или кольцевую ленту.
Электрические проводники могут также использоваться для передачи электронных сигналов между электронными компонентами, особенно, управляющими блоками. Как вариант, электрические проводники также 6
содержат цифровую шину данных для передачи цифровых данных сигналов между одним или более блоками управления и, по меньшей мере, одним из следующих устройств:
- батареи,
- солнечные фотоэлементы,
- двигатель или двигатели.
Для цифровых сигналов в качестве альтернативы электрическим проводникам может использоваться оптоэлектроника. Например, световоды для передачи цифровых световых сигналов могут быть интегрированы в строповую систему, например, вплетением гибких световодов в текстильный материал строповой системы. В альтернативном случае световоды прикреплены к поверхности строповой системы.
Как вытекает из следующего, различные компоненты поддерживаются строповой системой и независимы от корпуса. Корпус не нарушается этими структурами, минимизируя риск утечки. Преимущественно, компоненты прикреплены к корпусу только посредством строповой системы, которая окружает корпус. Это обеспечивает возможность изготовления строповой системы со всеми необходимыми компонентами отдельно от корпуса. Например, обеспечивают готовую строповую систему и вставляют в нее по меньшей мере частично наполненную газом оболочку, как финальный шаг перед запуском дирижабля.
В альтернативном случае строповую систему закрепляют вокруг корпуса после по меньшей мере частичного заполнения корпуса газом.
Обычно электрические проводники являются гибкими проводами, и материал строповой системы содержит контактные точки, в которых выполнено электрическое соединение между проводами и батареями, или солнечными фотоэлементами, или двигателями. Например, провода выходят из ткани только локально в этих контактных точках.
Обычно гибкие провода не являются растяжимыми. Однако провода могут иметь меандровую форму для обеспечения растяжимости проводников. В случае, если текстильный материал растяжим, особенно, 7
более растяжим, чем провода, опции для конструкционного согласования между тканевым материалом и проводниками включают провода в форме меандра, которые используются как растяжимые проводники.
В некоторых вариантах, в которых требуется растяжимая строповая система, материал включает эластомеры, обеспечивающие возможность упругого растяжения строповой системы.
Как дальнейшее опциональное свойство, кольцевая лента выполнена с устройством натяжения, работающим совместно с кольцевой лентой и выполненным с возможностью обеспечения напряжения стягивания на кольцевой ленте в направлении уменьшения длины кольцевой ленты. Этот признак обеспечивает регулируемый механизм, который минимизирует риск ослабления кольцевой ленты и ее отсоединения от корпуса. Такое устройство натяжения также обеспечивает возможность регулировки диаметра кольцевой ленты в случае изменения размера корпуса, без необходимости наличия растяжимого материала в самой кольцевой ленте. Этот признак также полезен для адаптации к изменениям объёма корпуса вследствие температурных изменений газа во время дня и ночи.
В возможном практическом варианте устройство натяжения кольцевой ленты содержит первый жёсткий рычаг, прикреплённый к первому местоположению на кольцевой ленте, второй жёсткий рычаг, прикреплённый ко второму местоположению на кольцевой ленте, и сокращающийся упругий элемент, соединяющий первый жёсткий рычаг со вторым жёстким рычагом и обеспечивающий упругую сокращающую силу для притягивания первого и второго местоположения на кольцевой ленте в направлении друг друга.
В конкретном варианте первый и второй жёсткие рычаги проходят наружу от кольцевой ленты и взаимно соединены в точке соединения рычагов, удалённой от кольцевой ленты, так что первое и второе местоположения, и место соединения рычагов формируют треугольник, при этом сокращающийся упругий элемент расположен внутри этого треугольника.
Как вариант, двигатель прикреплен к первому или второму жёсткому 8
рычагу или к ним обоим, например, в месте соединения рычагов.
Преимущественно, солнечные фотоэлементы не прикреплены к поверхности материала корпуса. Вместо этого, солнечные фотоэлементы прикреплены только к строповой системе. Например, солнечные фотоэлементы прикреплены к базовой ткани с формированием гибкой панели солнечных фотоэлементов, которая прикреплена к материалу корпуса, но не прикреплена к поверхности материала корпуса. Возможно, базовая ткань прикреплена к теплоизолирующему слою, например, слою пены, между базовой тканью и корпусом для минимизации рассеяния тепла от солнечных элементов к корпусу. Такая тройная структура также, преимущественно, прикреплена к строповой системе и поддерживается ею, в особенности, кольцевой лентой, или боковыми полосами, или тем и другим.
Обычно, строповая система плотно прилегает к поверхности корпуса и охватывает её по меньшей мере частично, но не приклеена к поверхности материала корпуса. Таким образом, ни клей, ни другой связующий материал не используется между строповой системой и поверхностью корпуса, и корпус не нарушается для любого крепления строповой системы к корпусу. Напротив, корпус вставлен в строповую систему или строповая система расположена вокруг корпуса, и строповая система фиксирует корпус внутри строповой системы с помощью давления между внешней поверхностью корпуса и внутренней поверхностью строповой системы. Это создаёт минимальные напряжения на материале корпуса, который должен быть тонким и лёгким по весу. Это также обеспечивает возможность легкого удаления корпуса из строповой системы и его замены, сохраняя строповую систему, как единое устройство с источником энергии, хранилищем энергии, двигателями и блоками управления.
Например, согласно следующему способу создают дирижабль легче воздуха. Обеспечивают наличие удлинённого корпуса с продольной осью, при этом корпус наполняют газом. Отдельно от корпуса, выполняют строповую систему из гибкого материала. Только после наполнения корпуса газом, вокруг корпуса размещают строповую систему с обеспечением 9
примыкания строповой системы к внешней стороне корпуса без нарушения корпуса и без прохождения через корпус.
Например, до установки строповой системы вокруг корпуса, к строповой системе прикрепляют панель солнечных фотоэлементов. Также, до такой установки или, альтернативно, после установки к строповой системе прикрепляют один или более винтовых двигателей для передней тяги дирижабля. Обычно используют два винтовых двигателя, по одному на каждую из противоположных сторон корпуса. Батареи, которые могут перезаряжаться солнечными фотоэлементами от солнечной панели, также прикрепляют к строповой системе для обеспечения электрической энергией винтового двигателя или двигателей. Электрические проводники, преимущественно интегрированные в гибкий материал строповой системы, электрически соединены с панелью солнечных фотоэлементов, батареями и винтовым двигателем или двигателями.
В некоторых конкретных вариантах строповая система имеет гибкую кольцевую ленту, содержащую два противоположных конца, выполненных с креплениями ленты. После заполнения корпуса газом, строповую систему закрепляют вокруг корпуса с помощью соединения двух креплений ленты с обеспечением прохождения кольцевой лента в виде кольца вокруг корпуса и вокруг продольной оси корпуса.
Чтобы избежать трудно управляемой подъемной силы корпуса во время установки строповой системы, корпус выполнен с перегородкой внутри, разделяющей корпус по меньшей мере на два отдельных объёма, из которых по меньшей мере один предназначен для воздуха и по меньшей мере один для гелия или водорода. Объём для воздуха, а иногда также другой объём для водорода или гелия наполняют до закрепления строповой системы вокруг корпуса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение объяснено далее более подробно со ссылкой на чертежи, на которых 10
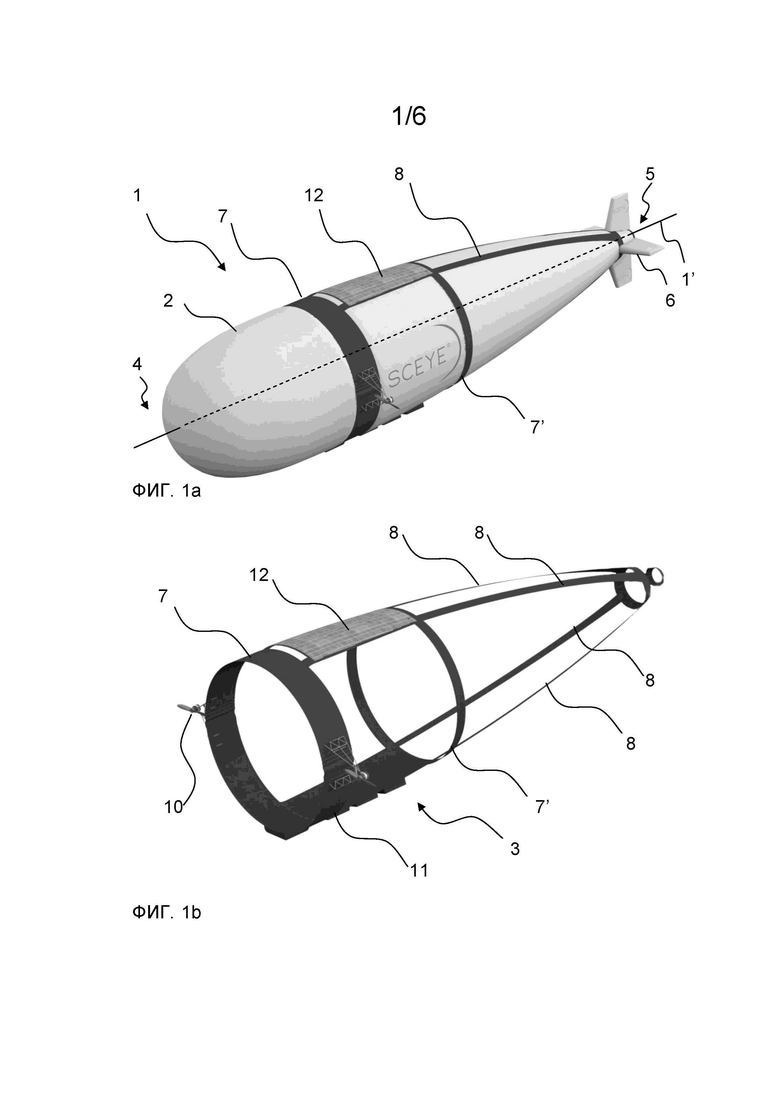
на фиг.1 изображен дирижабль легче воздуха со строповой системой и a) с корпусом и b) без корпуса;
на фиг.2 изображен альтернативный дирижабль легче воздуха со строповой системой и a) с корпусом и b) без корпуса;
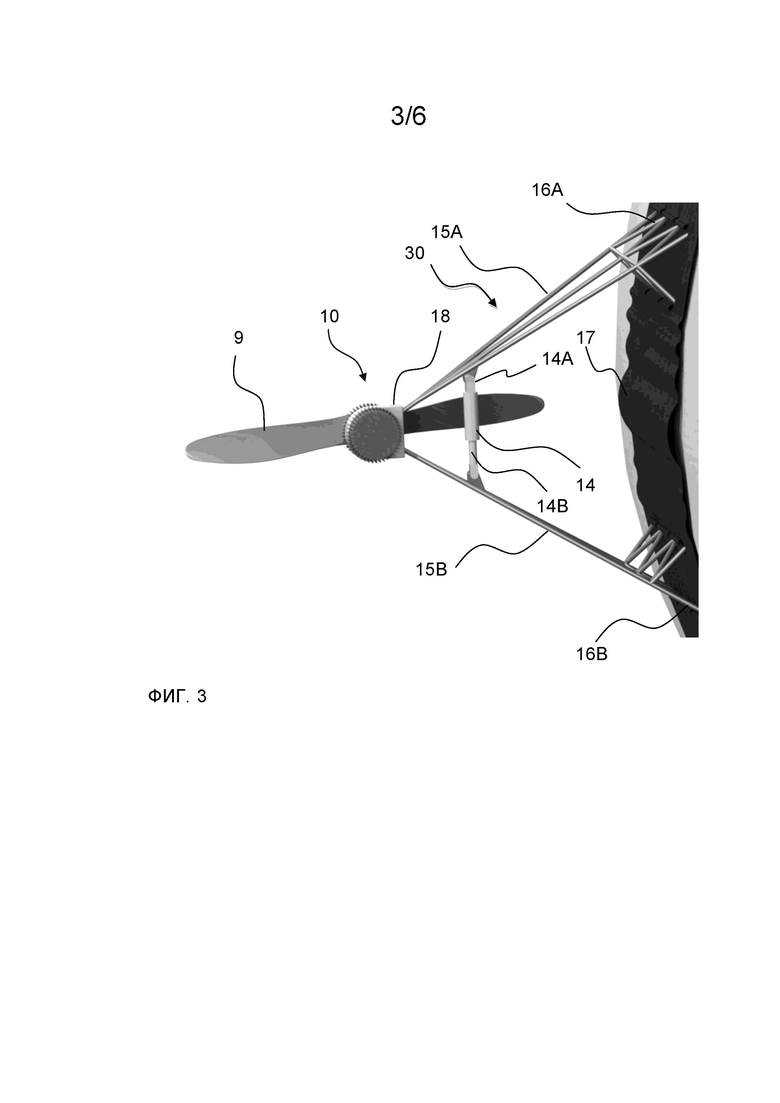
на фиг.3 изображен воздушный винт и устройство натяжения более подробно;
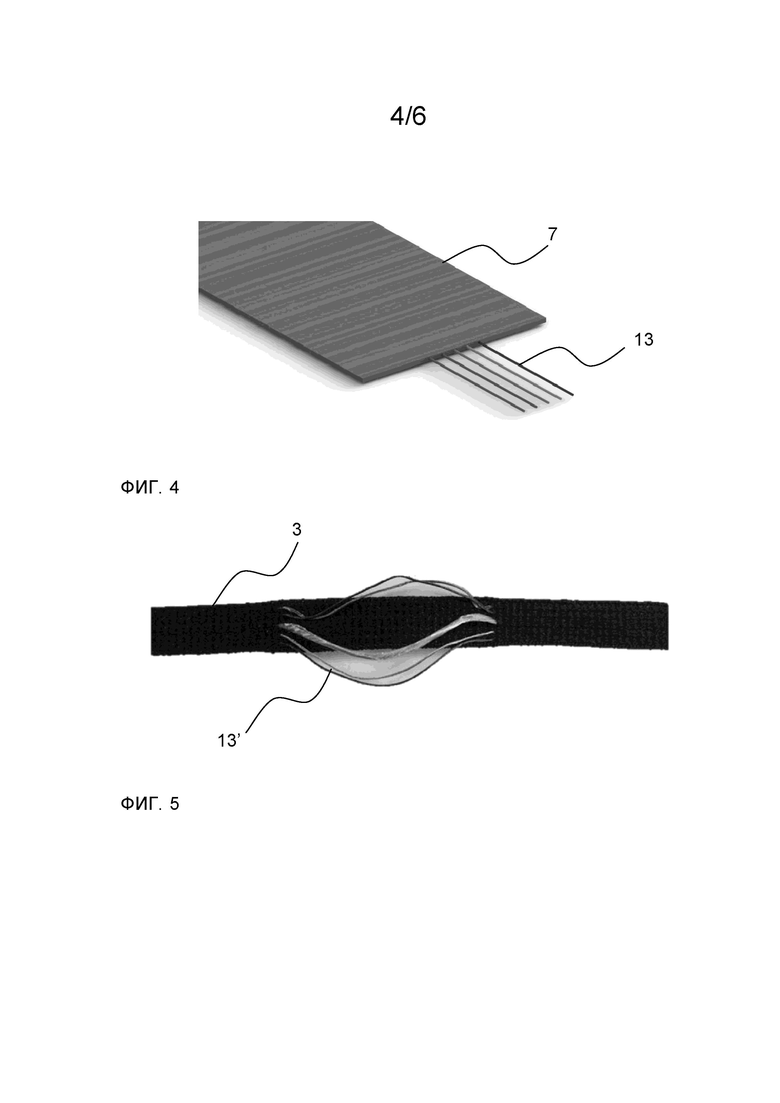
на фиг.4 схематически показана строповая система с интегрированными проводниками;
на фиг.5 изображен увеличенный чертёж ленты стропа;
на фиг.6 показаны герметичные соединители;
на фиг.7 схематически изображена панель солнечных фотоэлементов;
на фиг.8 изображена строповая система до установки на корпус.
ПОДРОБНОЕ ОПИСАНИЕ / ПРЕДПОЧТИТЕЛЬНЫЙ ВАРИАНТ
На фиг.1a изображен дирижабль 1 легче воздуха. Он содержит гибкий корпус 2, формирующий замкнутую удлинённую оболочку с продольной осью 1’. Дирижабль 1 имеет передний конец 4 и хвост со стабилизаторами 6 для устойчивости, а также, как вариант, для рулевого управления, рядом с задним концом 5 дирижабля 1 или на нем. Оболочка содержит газ, обычно гелий или водород. Если материал корпуса является упруго гибким, но не растяжимым, он обеспечивает корпусу высокую степень стабильности при заполнении. Типичным материалом для корпуса 2 является слоистый материал из усиленного волокнистого материала в комбинации с газонепроницаемыми плёнками. Известны различные варианты, описанные во многих документах, включая международную публикацию WO 2014/009314 и патенты США №№ 7713890 и 6074722.
Корпус 2 частично окружён строповой системой 3, лучше показанной отдельно на фиг.1b. Строповая система 3 примыкает к внешней стороне корпуса 2. Строповая система 3 содержит гибкую кольцевую ленту 7, проходящую как кольцо вокруг корпуса 2 и продольной оси 1’. Гибкие боковые полосы 8 прикреплены к кольцевой ленте 8 и проходят вдоль 11
внешней стороны корпуса 2 от кольцевой ленты 7 до заднего конца 5. Эти боковые полосы 8 не обязательны, и в некоторых вариантах они отсутствуют. Строповая система, как вариант, также содержит одну или более дополнительных кольцевых лент 7’.
Как вариант, кольцевая лента 7 и/или боковые полосы 8 являются нерастяжимыми для предотвращения упругого давления на корпус и объём газа внутри. В альтернативном случае, кольцевая лента 7 и/или боковые полосы 8 выполнены упруго растяжимыми для обеспечения плотной посадки на корпусе 2, даже когда корпус 2 изменяет размеры, например, из-за температурных изменений газа. Различные варианты предназначены для различных задач и зависят от требуемых условий.
Дирижабль 1 также содержит два электрических воздушных винта 9 с тягой вперёд, приводимых в действие электрическим винтовым двигателем 10. Двигатель 10 приводится в действие электрическим током от перезаряжаемых батарей 11, прикреплённых к строповой системе 3, например в нижней точке корпуса 2, так что батареи, благодаря своему весу, обеспечивают определённую ориентацию дирижабля 1. На противоположной стороне корпуса 2, которая во время нормальной работы находится наверху, или в верхнем наклонном положении, дирижабль 1 содержит панель 12 солнечных фотоэлементов для зарядки батарей 11 в дневное время, когда солнечный свет падает на солнечные фотоэлементы 12’ панели 12 солнечных фотоэлементов.
На фиг.2a и 2b показана альтернативная строповая система 3. Строповая система 3 содержит дополнительную боковую полосу 8a, прикреплённую к кольцевой ленте 7 и проходящую от положения на кольцевой ленте 7, в котором закреплён винтовой двигатель 10. Когда винтовой двигатель 10 создаёт тягу вперёд, дополнительная боковая полоса 8a тянет также задний конец 5 для минимизации сил от креплений винтового двигателя 10, которые имеют стремятся деформировать кольцевую ленту 7. Для дальнейшей потенциальной устойчивости, как вариант, выполнена передняя боковая полоса 8b, проходящая от кольцевой ленты 7 и вокруг 12
переднего конца 4. В случае, когда винтовые двигатели 10 работают в обратную сторону, такая передняя полоса 8b удерживает строповую систему 3 от соскальзывания с корпуса 2.
В варианте, изображенном на фиг.7, солнечные фотоэлементы 12’ прикреплены к базовой ткани 19, которая, как вариант, может быть прикреплена к теплоизолирующему слою 20 пены между базовой тканью 19 и корпусом 2 для минимизации рассеяния тепла от солнечных элементов 12’ к корпусу 2. Солнечные элементы 12’ электрически соединены панельными проводниками 26 на панели 12 солнечных фотоэлементов, например проводами солнечных фотоэлементов.
Токи от солнечных фотоэлементов 12’ к батареям 11, от батарей 11 к винтовым двигателям 10 и, возможно, от солнечных фотоэлементов 12’ к винтовым двигателям 10 проходят по проводникам 13, которые интегрированы в строповую систему 3, например в материал кольцевой ленты 7, как наилучшим образом схематически показано на фиг.4. Например, кольцевая лента 7 и, потенциально, боковые полосы 8 выполнены из тканого или вязаного материала, в который вплетены проводники 13. Пример тканой ленты с интегрированными, вплетёнными проводящими гибкими проводами 13’ показан на фиг. 5.
Далее делается ссылка на фиг.6, на которой показан еще один пример практического варианта выполнения. В точках 21, где проводам 13’ требуются электрические контакты, выполнены герметизированные соединители 21, содержащие охватываемую часть 21А с кабелем 22, и охватывающую часть 21B для приёма охватываемой части 21A. Охватывающая часть 21B электрически соединена с проводом 13’ и герметизирована в точке 21 герметизирующим материалом 24, обычно полимерной смолой. Охватываемая часть 22A образует конец кабеля 23, например присоединённого к солнечным фотоэлементам 12’, батареям 11, или винтовым двигателям 10. Обычно такие соединения с солнечными фотоэлементами 12’, батареями 11, или винтовыми двигателями 10 соединены с управляющими блоками, которые обеспечивают 13
соответствующее функционирование и координируют взаимодействие различных электрических и электронных компонентов.
Альтернативно вплетению в ткань, проводники расположены поверх материала строповой системы, например с помощью послойного нанесения или печати. Так же проводники могут быть интегрированы в материал строп, в результате чего при такой технологии проводники 13 становятся в значительной степени неотделимыми частями материала.
Как показано на фиг.3, кольцевая лента 7 содержит устройство 14 натяжения кольцевой ленты для создания напряжения стягивания на кольцевой ленте 7. Сила такова, что стремится уменьшить длину кольцевой ленты, обеспечивая плотное удержание кольцевой ленты 7 на внешней поверхности корпуса 2. Такое устройство 14 натяжения кольцевой ленты используют для компенсации изменения объёма из-за температурных сдвигов. Соответствующее изменение длины обычно составляет несколько процентов, например, менее 5%, или менее 2% длины кольцевой ленты.
Устройство натяжения 30 кольцевой ленты содержит первый жёсткий рычаг 15A, прикреплённый к первому местоположению 16A на кольцевой ленте 7, и второй жёсткий рычаг 15B, прикреплённый ко второму местоположению 16B на кольцевой ленте 7. Первый жёсткий рычаг 15A и второй жёсткий рычаг 15B присоединены к упругому сокращающемуся элементу 17, соединяющему первый жёсткий рычаг 15A со вторым жёстким рычагом 15B и обеспечивающему упругую сокращающую силу для притягивания первого местоположения 16A и второго местоположения 16B на кольцевой ленте 7 в направлении друг к другу. Как показано, первый жёсткий рычаг 15A и второй жёсткий рычаг 15B проходят наружу от кольцевой ленты 7 и взаимно соединяются в точке 18 соединения рычагов, удалённой от кольцевой ленты 7. Первое местоположение 16A и второе местоположение 16B, и точка 18 соединения рычагов образуют треугольник, причем сокращающийся упругий элемент 14 расположен внутри этого треугольника. В настоящей иллюстрации расстояние винтового двигателя 10 от корпуса составляет порядка длины винта 9. 14
Например, сокращающийся упругий элемент 14 является винтовой пружиной (не показано) внутри втулки 14A, в которой упруго проходит стержень 14B. Втулка 14A и стержень 14B присоединены к первому и второму рычагам 15A и 15B, соответственно.
Строповая система 3 является автономной системой в том смысле, что она несёт всю электрическую систему без нарушения корпуса 2 и без прохождения через корпус 2. Например, строповая система 3 выполнена как завершенный объект, который устанавливают на корпус после его заполнения газом. Преимуществом является то, что корпус может заполняться газом свободно, без риска появления складок между материалом корпуса и строповой системой 3. Соответственно, прикрепление строповой системы 3 к корпусу 2 после его заполнения минимизирует риск повреждения корпуса 2 и минимизирует риск создания слабых точек в корпусе 2.
Например, строповая система 3 выполнена как полу-завершённая система с панелью 12 солнечных фотоэлементов и проводниками 13, интегрированными в строповый материал. Пример показан на фиг.8. Строповая система 3 в этом варианте выполнения содержит кольцевую ленту 7 и еще одну кольцевую ленту 7’, но без боковых полос. Две кольцевые ленты 7, 7’ имеют прикреплённую между ними панель 12 солнечных фотоэлементов, в которой также интегрированы электрически проводящие панельные проводники 26 и возможные электронные компоненты 29, например, для измерения параметров, таких как температура и электрическая нагрузка. Панельные проводники 26, например провода солнечного фотоэлемента, для тока, который питает батареи и винтовые двигатели 10, электрически присоединены к проводникам 13, которые интегрированы в кольцевую ленту 7. На кольцевой ленте 7 также размещен блок 25 управления для электронного управления винтовыми двигателями, зарядкой и разрядкой батарей и/или солнечных фотоэлементов 12’ на панели 12 солнечных фотоэлементов. Например, блок 25 управления электрически соединён проводниками 13’ с электронными компонентами 29 для получения 15
значений параметров, таких как измерения характеристик работы и температуры солнечных элементов 12’. Как вариант, проводник 13’ для измерений является цифровой шиной данных. Как дальнейшая опция, также дальнейшая кольцевая лента 7’ имеет проводники, интегрированные в материал строповой системы.
Когда строповая система 3 прикреплена к заполненному корпусу 2, кольцевая лента 7 и дополнительная кольцевая лента 7’ должны быть замкнуты как кольца вокруг корпуса 2. Это может быть выполнено устройствами 28 натяжения ленты, которые прикреплены к концам кольцевых лент 7, 7’, и которые, когда объединены, замыкают кольцевую ленту в кольцевую структуру, например, используя взаимно соединяющиеся стропы 28 крепления. Этот принцип подобен креплению седла на лошадь, который также выражается термином «упряжь».
Как вариант, стропы 28 крепления являются упруго растяжимыми для обеспечения возможности упругой регулировки длины кольцевой ленты 7, особенно, во время подъёма дирижабля 1 на большую высоту, например в стратосферу. Такие упруго растяжимые стропы 28 крепления могут использоваться как альтернатива, или в дополнение к устройствам 30 натяжения ленты.
Винтовые двигатели 10 могут быть предварительно прикреплены к ленте 7 до крепления строповой системы 3 к наполненному газом корпусу 2. Альтернативно, винтовые двигатели 10 прикрепляют к ленте 7 после крепления строповой системы 3 к наполненному газом корпусу 2. Как вариант, батареи 11 также прикрепляют к строповой системе 3 после крепления строповой системы 3 к корпусу 2. При этом, в принципе, панель 12 солнечных фотоэлементов может быть прикреплена к кольцевым лентам 7, 7’ после крепления кольцевых лент 7, 7’ вокруг заполненного газом корпуса 2, в некоторых вариантах предпочтительно обеспечение строповой системы 3 с кольцами 7, 7’, к которым уже прикреплена и электрически соединена панель 12 солнечных фотоэлементов. Это гарантирует правильное расстояние между кольцами 7, 7’ во время крепления, а также облегчает 16
выполнение электрических и электронных соединений между панелью 12 солнечных фотоэлементов и кольцевой лентой 7.
Например, для полной процедуры установки корпус 2 полностью надувают, строповую систему 3, включающую кольцевые ленты 7, 7’ и панель 12 солнечных фотоэлементов, прикрепляют вокруг корпуса 2, винтовые двигатели 10 и батареи 11 прикрепляют к кольцевой ленте и электрически соединяют на последующих шагах, так же как любую дополнительную нагрузку. В принципе, никаких дальнейших шагов не требуется.
Примерами полезной нагрузки для дирижабля 1 являются камеры, антенны и трансиверы (приёмопередатчики), как вариант для телекоммуникации и наблюдения.
Ссылочные позиции
1 дирижабль
1’ продольная ось дирижабля
2 гибкий корпус
3 строповая система
4 передний конец дирижабля 1
5 задний конец дирижабля 1
6 стабилизаторы на заднем конце 5
7 кольцевая лента строповой системы 3
7’ опциональные дополнительные кольцевые ленты
8 боковые ленты строповой системы 3
8a дополнительные боковые ленты, проходящие от положения двигателя 9 до заднего конца 5
8b передняя лента, проходящая от кольцевой ленты 7 и вокруг переднего конца 4
9 воздушный винт
10 винтовой двигатель
11 батареи 17
12 панель солнечных фотоэлементов
12’ солнечные фотоэлементы
13 проводники
13’ провода в качестве проводников
13’’ шина данных
14 сжимающийся упругий элемент
14A втулка сжимающегося упругого элемента
14B стержень, упруго проходящий во втулку 14A
15A первый жёсткий рычаг, прикреплённый к первому местоположению 16A
15B второй жёсткий рычаг, прикреплённый к второму местоположению 16B
16A первое местоположение на кольцевой ленте 7
16B второе местоположение на кольцевой ленте 7
17 упруго сокращающийся элемент, соединяющий первый жёсткий рычаг 15А со вторым жёстким рычагом 15B
19 базовая ткань, к которой крепятся солнечные фотоэлементы
20 изолирующая пена, к которой крепится базовая ткань
21 точки для электрического контакта проводников 13/проводов 13’
22 соединитель
22A охватываемая часть соединителя 22
22B охватывающая часть соединителя 22
23 кабель в охватываемой части
24 герметизирующий материал в точке 21
25 контроллер
26 панель проводников, например проводов солнечных элементов
27 крепежный элемент ленты
28 стропа на крепежном элементе ленты 27
29 электронные компоненты для измерения параметров на панели 12 солнечных фотоэлементов
30 устройство натяжения кольцевой ленты



Дирижабль (1) легче воздуха содержит наполненный газом удлиненный гибкий корпус (2), имеющий продольную ось (1’), передний конец (4) и задний конец (5). К наружной стороне корпуса (2) примыкает строповая система (3) без нарушения корпуса и без прохождения через корпус. Строповая система (3) выполнена из гибкого материала и на ней размещены винтовой двигатель (10) для создания направленной вперед тяги дирижабля (1), перезаряжаемые батареи (11) для обеспечения электрической энергией винтового двигателя (10) и панель солнечных фотоэлементов для подачи электрической энергии для перезарядки батарей (11). Способ изготовления дирижабля характеризуется закреплением элементов дирижабля. Группа изобретений направлена на расширение арсенала технических средств. 3 н. и 14 з.п. ф-лы, 8 ил.
1. Дирижабль (1) легче воздуха, содержащий наполненный газом гибкий корпус (2), удлинённый вдоль продольной оси (1’) и имеющий передний конец (4) и задний конец (5), при этом к наружной стороне корпуса (2) примыкает строповая система (3) без нарушения корпуса (2) и без прохождения через корпус (2), причем строповая система (3) выполнена из гибкого материала и на ней размещены винтовой двигатель (10) для создания направленной вперед тяги дирижабля (1), перезаряжаемые батареи (11) для обеспечения электрической энергией винтового двигателя (10) и панель (12) солнечных фотоэлементов для обеспечения электрической энергии для перезарядки батарей (11),
причем панель (12) солнечных фотоэлементов, батареи (11) и винтовой двигатель (10) электрически соединены с помощью электрических проводников (13), встроенных в гибкий материал строповой системы (3), который является текстильным материалом, содержащим нити, среди которых электрические проводники (13) размещены как часть указанного текстильного материала.
2. Дирижабль по п. 1, в котором электрические проводники (13) являются проводами, которые переплетены с указанными нитями, или вплетены, или вшиты в указанный текстильный материал.
3. Дирижабль по п. 1 или 2, в котором ткань содержит контактные точки, в которых обеспечено электрическое соединение между проводами и батареями, или солнечными фотоэлементами, или двигателем, причём в этих точках провода только локально выходят из ткани.
4. Дирижабль по п. 1, в котором проводники (13) напечатаны или нанесены в виде слоя на гибком материале строповой системы (3).
5. Дирижабль по любому из пп. 1-4, в котором электрические проводники (13) также содержат цифровую шину (13’) данных для передачи цифровых данных между блоком (25) управления и батареями (11),
панелью (12) солнечных фотоэлементов и винтовым двигателем (10).
6. Дирижабль по любому из пп. 1-4, в котором строповая система (3) содержит гибкую кольцевую ленту (7), которая проходит в виде кольца вокруг корпуса (2) и вокруг продольной оси (1’) и на которой расположена панель (12) солнечных фотоэлементов.
7. Дирижабль по п. 6, в котором кольцевая лента (7) снабжена устройством (30) натяжения кольцевой ленты, выполненным с возможностью автоматического и упругого приложения сокращающего напряжения к материалу кольцевой ленты в направлении уменьшения длины кольцевой ленты (7) для компенсации изменений объёма корпуса (2).
8. Дирижабль (1) легче воздуха, содержащий наполненный газом гибкий корпус (2), удлинённый вдоль продольной оси (1’) и имеющий передний конец (4) и задний конец (5), при этом к наружной стороне корпуса (2) примыкает строповая система (3) без нарушения корпуса (2) и без прохождения через корпус (2), причем строповая система (3) выполнена из гибкого материала и на ней размещены винтовой двигатель (10) для создания направленной вперед тяги дирижабля (1), перезаряжаемые батареи (11) для обеспечения электрической энергией винтового двигателя (10) и панель (12) солнечных фотоэлементов для обеспечения электрической энергии для перезарядки батарей (11),
причем панель (12) солнечных фотоэлементов, батареи (11) и винтовой двигатель (10) электрически соединены с помощью электрических проводников (13), которые встроены в гибкий материал строповой системы (3),
при этом строповая система (3) содержит гибкую кольцевую ленту (7), которая проходит в виде кольца вокруг корпуса (2) и вокруг продольной оси (1’) и на которой расположена панель (12) солнечных фотоэлементов,
причем кольцевая лента (7) выполнена из материала, в который встроены электрические проводники (13), которые обеспечивают
электрическое соединение панели (12) солнечных фотоэлементов и батарей (11).
9. Дирижабль по п. 8, в котором на кольцевой ленте (7) также размещен винтовой двигатель (10), при этом электрические проводники (13), встроенные в материал кольцевой ленты, также электрически соединены с винтовым двигателем (10).
10. Дирижабль по п. 8 или 9, в котором строповая система (3) содержит дополнительную кольцевую ленту (7’), расположенную на расстоянии от указанной кольцевой ленты (7), причём панель (12) солнечных фотоэлементов проходит от указанной кольцевой ленты (7) к дополнительной кольцевой ленте (7’) и прикреплена к обеим кольцевым лентам (7, 7’).
11. Дирижабль по любому из пп. 8-10, в котором кольцевая лента (7) снабжена устройством (30) натяжения кольцевой ленты, выполненным с возможностью автоматического и упругого приложения сокращающего напряжения к материалу кольцевой ленты в направлении уменьшения длины кольцевой ленты (7) для компенсации изменений объёма корпуса (2).
12. Дирижабль по п. 11, в котором устройство (30) натяжения кольцевой ленты содержит первый жёсткий рычаг (15A), прикреплённый к первому местоположению (16A) на кольцевой ленте (7), второй жёсткий рычаг (15B), прикреплённый ко второму местоположению (16B) на кольцевой ленте (7), и сокращающийся упругий элемент (14), соединяющий первый жёсткий рычаг (15A) со вторым жёстким рычагом (15B) и обеспечивающий упругую сокращающую силу для притягивания первого местоположения (16A) и второго местоположения (16B) на кольцевой ленте (7) в направлении друг друга.
13. Дирижабль по п. 12, в котором винтовой двигатель (10) прикреплён к первому жёсткому рычагу (15A), или ко второму жёсткому рычагу (15B), или к ним обоим.
14. Дирижабль по п. 11 или 12, в котором первый жёсткий рычаг (15A) и второй жёсткий рычаг (15B) проходят от кольцевой ленты (7) наружу и взаимно соединены в точке (18) соединения рычагов, удалённой от кольцевой ленты (7), так что первое и второе местоположения (16A, 16B) и точка (18) соединения рычагов образуют треугольник, при этом сокращающийся упругий элемент (14) расположен внутри этого треугольника.
15. Дирижабль по п. 13, в котором винтовой двигатель (10) прикреплен к первому и второму жёстким рычагам (15A, 15B) в точке (18) соединения рычагов.
16. Способ изготовления дирижабля (1) легче воздуха, включающий:
обеспечение наличия удлинённого корпуса (2), имеющего продольную ось (1’), и наполнение корпуса (2) газом;
обеспечение наличия строповой системы (3), выполненной из гибкого материала;
закрепление строповой системы (3) вокруг корпуса (2) после его наполнения, так что строповая система (3) примыкает к внешней стороне корпуса (2) без нарушения корпуса (2) и без прохождения через корпус (2);
прикрепление к строповой системе (3) винтового двигателя (10) для создания направленной вперед тяги дирижабля (1), перезаряжаемых батарей (11) для обеспечения электрической энергией винтового двигателя (10) и панели (12) солнечных фотоэлементов для обеспечения электрической энергии для перезарядки батарей (11),
причем панель (12) солнечных фотоэлементов прикрепляют к строповой системе (3) до закрепления указанной системы (3) вокруг корпуса (2),
при этом строповая система (3) содержит гибкую кольцевую ленту (7), которая имеет два противоположных конца, на которых расположены крепежные элементы (27) ленты, причем после заполнения корпуса (2)
строповую систему (3) закрепляют вокруг корпуса (2) путем взаимного соединения указанных двух крепежных элементов (27), так что кольцевая лента (7) проходит в виде кольца вокруг корпуса (2) и вокруг продольной оси (1’) корпуса (2).
17. Способ по п. 16, в котором обеспечивают наличие электрических проводников (13), встроенных в гибкий материал строповой системы (3), и соединяют с помощью электрических проводников (13) панель (12) солнечных фотоэлементов, батареи (11) и винтовой двигатель (10).
| JP 6163964 A, 10.06.1994 | |||
| US 20060192048 A1, 31.08.2006 | |||
| US 8141814 B2, 27.03.2012 | |||
| ДИРИЖАБЛЬ С ЭЛЕКТРОДВИГАТЕЛЕМ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2013 |
|
RU2556134C2 |

