Изобретение относится к области сейсмологии, а именно к способам определения предвестников цунами, ураганов и тропических штормов.
Известны способы определения предвестника цунами (патент RU №22082184 [1], патент RU №2066467 [2], авторское свидетельство SU №1300393 [3]), включающие формирование упругих колебаний, их регистрацию, сравнение их с опорным сигналом, определение сейсмических параметров среды.
Недостатком данных способов является необходимость подавления квазисинусоидальных помех, а также помех техногенного характера.
Кроме того, определение координат гипоцентра морского землетрясения и его магнитуды посредством наземных сейсмографов Отягощено невысокой точностью измерений, что не позволяет с достаточной достоверностью установить признаки для выполнения оценки возможности наступления цунами, так как на значительных расстояниях (больших размеров очага) невозможно определить характер деформации дна, а существенная волна цунами возникает только при вертикальных или наклонных его движениях.
Известен также способ определения опасности цунами (патент RU №22066466 [4]), включающий размещение в прибрежной зоне на глубине более 100 м групп устройств регистрации, соединение их трактом связи с наземными станциями приема и обработки сигналов путем поэтапного определения опасности цунами. На расстоянии 2-4 тысяч километров от берега устанавливают еще одну группу устройств регистрации, а групп устройств регистрации в прибрежной зоне размещают на расстоянии, обеспечивающем необходимое время на защиту охраняемого района, определяемом на основании формульной зависимости. Факт возникновения цунами устанавливают по сигналам дальних устройств, а по сигналам ближних устройств регистрации, установленных в прибрежной зоне на глубине более 100 м, определяют степень опасности волны цунами для охраняемого района.
Поэтапное определение опасности цунами в известном способе [4] обеспечивает повышение надежности прогноза цунами по сравнению с аналогами [1-3]. Однако размещение регистрирующих устройств на глубинах более 100 м огранивает информативность получения первичных сигналов, и как следствие этого снижает достоверность прогноза, так как известно, что наибольшая информативность первичных сигналов наблюдается на глубинах 6-10 м от уровня прилива, вблизи берега и вдоль континентальных шельфов.
Кроме того, непосредственное использование зарегистрированных сигналов в качестве прямых предвестников цунами осложнено наличием помех, создаваемых шумами морской среды различного происхождения (динамические, обусловленные приливно-отливными движениями водной толщи, ветровыми волнами, турбулентными потоками в воде и атмосфере, дождями, прибойными движениями и т.п.), а также шумами от морских судов и прибрежных технических сооружений. Наличие помех также обусловлено воздействием сейсмических шумов, к которым, помимо сигналов, вызванных тектоническими сдвигами (землетрясениями), относятся также сигналы, обусловленные вулканической деятельностью и распространением цунами.
Кроме того, шумовые помехи могут быть следствием процессов образования и динамики ледяного покрова, а также взаимодействием ветра и подводных течений с неровностями ледяного покрова, биологических и тепловых процессов, что требует обеспечения высокого отношения сигнал/помеха при приеме сигналов.
Для повышения информативности в способе сейсмического микрорайонирования (авторское свидетельство SU №251694 [5]), включающем размещение исследуемых и опорных пунктов наблюдений на участках с различными инженерно-геологическими условиями, регистрацию в них сейсмических колебаний от землетрясений из потенциально опасных и других очаговых зон, определение динамических параметров сейсмических колебаний и их вариаций в каждом исследуемом пункте наблюдений относительно опорных в заданном частотном диапазоне исследований, дополнительно проводят трехкомпонентную регистрацию сейсмических колебаний по ортогональной ориентированной на потенциально опасные очаговые зоны сети профилей, с расстоянием между пунктами наблюдений, не превышающим 1/3-1/4 длины волны наиболее высокочастотных сейсмических колебаний, образующих информативные вариации амплитуд, а расстояние между профилями составляет 1/3-1/4 минимального пространственного периода информативных амплитудных вариаций высокочастотного диапазона сейсмических колебаний.
Однако ввиду того, что в общем случае величина амплитуд давления сейсмических сигналов зависит от величины вызвавшего сигнал вертикального смещения дна (определяемого произведением скорости смещения на длительность импульса); волнового сопротивления вод (определяемого произведением плотности воды на скорость звука); угла преломления акустической волны, вышедшей из дна в воду, а также удаления горизонта наблюдений от дна, достоверные сигналы могут регистрироваться на высоких частотах (50-80 Гц и выше), что ограничивает применение известного способа только при размещении пунктов наблюдений на участках с однородными инженерно-геологическими условиями, что существенно снижает информативность данного способа.
Повышение информативности достигается в известном способе (патент RU №1787273 [6]), который заключается в задании региональных кусочно-непрерывных профилей, ориентировании их в крест простирания изучаемых тектонических элементов, задании поперечных профилей и проведении по ним наблюдений, в котором региональные профили задают в виде пар квазипараллельных кусочно-непрерывных профилей, а поперечные - в виде пересекающихся друг с другом кусочно-непрерывных профилей, ориентируют поперечные профили по простиранию изучаемых тектонических элементов, создают вокруг этих элементов замкнутый полигон, при этом положение каждой последующей пары профилей уточняют после получения данных в предыдущей паре профилей, а расстояние между региональными профилями определяют по размерам изучаемых тектонических элементов, что повышает информативность за счет возможности изучения сложно построенных сред.
Однако данный способ имеет ограничения по применению, так как создание замкнутого полигона отягощено выполнением требований по обеспечению высокоточного координирования, что возможно обеспечить только в сухопутных условиях.
В известном способе сейсмического микрорайонирования (патент RU №1787276 [7]), который заключается в возбуждении сейсмических колебаний невзрывным импульсным источником, регистрации их сейсмоприемниками, расположенными на участках с различными инженерно-геологическими условиями, определении значения скоростей поперечных волн, частотных характеристик зарегистрированных колебаний и оценке на основе этих характеристик приращения балльности, и в котором дополнительно возбуждают повышенные сейсмические колебания, по сравнению с первоначальными колебаниями, а в качестве величины, характеризующей частотную характеристику колебаний, используют величину, обратную средневзвешенному периоду в полосе частот 0,3-30 Гц, определяют приращение балльности для дополнительного возбуждения и вводят величину разности балльностей в качестве поправки за нелинейные эффекты в полученные ранее данные наблюдений, использовавшие маломощный, сейсмический источник, что повышает надежность и точность за счет более полного учета нелинейных свойств грунта.
Существенным недостатком данного способа является необходимость создания развивающегося напряжения в грунте не менее 0,1 и 5 кг/см, что в условиях морского дна является сложной технической задачей.
Известен также способ сейсмической разведки (RU №1787275 [8]), который включает возбуждение и регистрацию интерференционной системой сейсмических сигналов по системе многократного профилирования и обработку полученных данных, в котором по сейсмограммам, полученным в результате предварительных работ на участке профилг исследований, строят скоростно-угловые спектры из соотношения временной задержки для годографа от двойного времени пробега волны по нормали к отражающей границе, удаления взрыв - прибор, эффективной скорости до границы и угла наклона границы, по построенным спектрам выделяют основные сейсмические волны и проводят последующие сейсмические работы на профиле для выбранных параметров сейсмических волн интерференционной регистрирующей системой с оптимальной характеристикой направленности, параметры которой определяют из соотношения в зависимости от текущего угла, кратности интерференционной системы, опорной частоты сигнала и запаздыванием между двумя годографами для углов наклона и текущих углов, что повышает эффективность сейсмической разведки в сложно построенных средах. Однако технический эффект данного способа может быть получен только в сухопутных условиях при отсутствии воздействия окружающей среды.
В известном способе сейсмической разведки (патент RU №1787274 [9]), включающем разделение геологического объекта на глубинные этажи, определение наибольшей частоты сейсмических сигналов, приходящих с каждого этажа, расчет для каждого глубинного этажа шага квантования по времени меньшего чем 1/4 наибольшей частоты сейсмического сигнала для i-ro глубинного этажа, а по пространству меньшему или равному отношению длины волны наибольшей частоты сейсмического сигнала для ir0 этажа к углу наклона фронта приходящей волны, возбуждение, прием группами сейсмоприемников, цифровую регистрацию с рассчитанными шагами квантования по времени и пространству для каждого глубинного этажа и обработку принимаемых сигналов, в котором для каждого глубинного этажа определяют длину базы группирования сейсмоприемников по выражению, в котором длина базы равна или меньше отношения длины волны наибольшей частоты сейсмического сигнала для iго этажа к четырем синусам угла наклона фронта приходящей волны, что позволяет повысить отношение сигнал/помеха на этапе приема и повысить точность исследования при приеме сигналов.
Технический результат, достигаемый при использовании данного способа, может быть получен только при жесткой привязке сейсмических приемников, что может быть обеспечено только в сухопутных условиях.
В известном способе обнаружения возможности наступления катастрофических явлений (патент RU №2030769 [10]), включающем измерение параметра геофизического поля в контролируемом районе и суждение по полученным данным о возможности наступления катастрофических явлений, в котором измерения производят непрерывно, выявляют колебания измеряемого параметра и при обнаружении синусоидальных колебаний возрастающей частоты, имеющих амплитуду, статистически достоверно отличающуюся от фоновой для контролируемого района, и период от 100 до 1000000 с, судят о наличии возможности наступления катастрофических явлений, что повышает достоверность прогноза. Однако непосредственное использование этих сигналов в качестве прямых предвестников цунами осложнено наличием помех, создаваемых шумами морской среды различного происхождения, в связи, с чем возникает задача выделения подводных сейсмических сигналов на фоне шумов морской среды.
Известна также система для определения колебаний водной поверхности (патент RU №2319984 С2, 20.03.2008 [11]), которая относится к сейсмической и акустической разведке районов, покрытых водой, и может быть использована для предупреждения о волнах цунами, возникающих вследствие подъема или опускания значительных водных масс океана. Известная система для определения колебаний водной поверхности [11], содержит микробарографы, разнесенные на фиксированные расстояния вдоль береговой линии. Микробарографы подключены через схему сравнения к системе оповещения. Дополнительно система для определения колебаний водной поверхности снабжена блоком памяти, пунктом контроля и двумя корреляторами. Техническим результатом является повышение достоверности определения колебаний водной поверхности, что достигается путем попарного размещения микробарографов вдоль береговой черты. Однако, колебания уровня моря вблизи берега искажаются вследствие рефракции, нелинейного взаимодействия волн друг с другом, рассеяния на нерегулярностях вдоль береговой линии. На них оказывают воздействие волновой захват и шельфовый резонанс, придонное трение на мелководье, а также локальный резонанс отдельных акваторий (бухт, фиордов и портов), где обычно устанавливаются мареографы. Все это затрудняет выделение неискаженного сигнала цунами.
Наиболее широкий спектр сигналов с последующей их обработкой позволяет получить более достоверный прогноз наступления катастрофических явлений, можно получить при использовании способа сейсмической разведки (патент RU №2030766 [12]), включающего возбуждение упругих колебаний, их регистрацию сейсмоприемниками, каждый из которых содержит три датчика, расположенных под углом 45 градусов к горизонтальной плоскости, и обработку полученных записей с выделением полезного сигнала, в котором одновременно возбуждают упругие волны Р и S-типа, регистрацию проводя! сейсмоприемниками, каждый из которых дополнительно содержит четвертый датчик, при этом все датчики равномерно распределены по азимуту, при обработке полученных записей рассчитывают прямоугольные декартовые координаты полного вектора волнового поля в каждой точке приема путем сравнения модулей декартовых проекций, рассчитанных в каждой точке приема, с модулем полного вектора в данной точке приема, выделяют три монотипные линейно-поляризованные волны РР-, SV-, SH-типа и нелинейно-поляризованную волну, которые используют в качестве полезного сигнала.
Регистрация сигналов фазы (РР), характеризующей приход волн, связанный с распространением в земной коре волн сжатия, и фазы (S), характеризующей вторичный приход волн, связанный с распространением в земной коре поперечных волн, скорость распространения которых приблизительно в два раза меньше скорости распространения продольных волн, существенно повышает надежность прогноза предвестника землетрясений, однако в тех случаях, когда очаг землетрясения достаточно близок ко дну океана, в гидроакустических сигналах присутствует Т-фаза, третичный приход волн, скорость которого близка к скорости звука в воде (Walker D.A. and Bernard E.N. Comparison of t-phase spectra and tsunami. Amplitudes for tsunamigenic and other earthquakes. J. Geophys. Res., 98, №7, p.12557-12565, 1993 [13]). Подводные же землетрясения, очаги которых достаточно близки к поверхности дна океана, могут обуславливать его значительные вертикальные подвижки, вызывающие на поверхности воды гравитационные волны, которые, в свою очередь, распространяясь в мелкой воде прибрежной зоны океана, могут вызывать цунами (Okal Е.А. Seismic parameters controlling far-field tsunami amplitudes: A review, nat. hazards. 1, p.69-96, 1988 [14]). В данном способе, как и в известных способах [1-12], сигналы, обусловленные третичным приходом волн, не учитываются, что существенно снижает вероятность прогноза.
В также известном способе определения предвестников цунами (патент RU №2292569 [15]), который включает размещение в прибрежной зоне и на удалении от прибрежной зоны групп устройств регистрации сигналов на глубинных горизонтах наблюдений, равномерно распределенных по азимуту, соединение их трактом связи с внешними станциями приема и обработки сигналов путем поэтапного определения опасности возникновения цунами с определением динамических параметров сейсмических колебаний и их вариаций в каждом исследуемом пункте наблюдений в заданном частотном диапазоне с обработкой регистрируемых сигналов в высокочастотном и низкочастотном диапазонах сейсмических колебаний с выделением фаз сигналов, характеризующих приход волн, связанный с распространением в земной коре волн сжатия и поперечных волн, в котором дополнительно регистрируют гидроакустические сигналы с Т-фазой; устройства регистрации размещены на горизонтах наблюдений, кратных 25 м, при максимальном горизонте наблюдений, равном 100 м; определяют приход акустической волны сейсмического происхождения по величине сдвига частоты рассеянного излучения, при этом посредством средств регистрации, размещенных в ближней зоне от очага землетрясения, выполняют анализ низкочастотных составляющих рассеянного сигнала, а в качестве опорных квазигармонических высокочастотных сигналов используют шумы судоходства; посредством средств регистрации, размещенных в прибрежной зоне, момент появления и направление прихода сейсмоакустических волн определяют путем узкополосной фильтрации и спектрального анализа волн на комбинационных частотах.
Совокупность отличительных признаков данного способа по сравнению с известными способами [1-12], которые заключаются в регистрации гидроакустических сигналов с Т-фазой, размещении устройств регистрации сигналов на горизонтах наблюдений, кратных 25 м, при максимальном горизонте наблюдений, равном 100 м, определение прихода акустической волны сейсмического происхождения по величине сдвига частоты рассеянного излучения, при этом посредством средств регистрации, размещенных в ближней зоне от очага землетрясения, выполняют анализ низкочастотных составляющих рассеянного сигнала, а в качестве опорных квазигармонических высокочастотных сигналов используют шумы судоходства, а посредством средств регистрации, размещенных в прибрежной зоне, момент появления и направление прихода сейсмоакустических волн определяют путем узкополосной фильтрации и спектрального анализа волн на комбинационных частотах, что существенно повышает информативность за счет регистрации более широкого спектра сигналов путем выделения подводных сейсмоакустических сигналов на фоне шумов морской среды и как следствие этого надежность и достоверность прогноза вероятности возникновения цунами.
В тоже время возбуждение волн цунами землетрясениями в сжимаемой жидкости сопровождается генерацией гидроакустических полей в более широком частотном диапазоне, а их энергия может превышать энергию волн цунами. При этом низкочастотные поля (f<1 Гц), так же как и волны цунами, возбуждаются в основном за счет вертикальных подвижек дна в эпицентре землетрясения. Возбуждение высокочастотных гидроакустических полей (фаза Т) происходит на значительно большей площади и существенно зависит от рельефа дна. Поэтому высокочастотные гидроакустические поля содержат относительно меньше информации собственно о формах движения дна в эпицентре землетрясения. Наличие интенсивных низкочастотных акустических полей в очаге цунами наблюдается в диапазоне 0,05-0,4 Гц, при этом основная энергия упругих колебаний превышает энергию волны цунами примерно в 300 раз (Левин Б.В., Носов М.А. Физика цунами, М.: Янус - К, 2005. 360 с. [16]).
На очень низких частотах (ниже 0,01 Гц) вследствие пренебрежимо малой толщины слоя океана по сравнению с длиной волны происходит непосредственное возбуждение анемобарических волн за счет перепадов атмосферного давления (Рабинович А.Б. Длинные гравитационные волны в океане: захват, резонанс, излучение. Спб.: Гидрометеоиздат, 1993, 325 с. [17]). Часть энергии микросейсм, распространяющихся под малыми углами к вертикали, рассеиваются в толще земли в виде объемных волн в соответствии с законом 1/г2. Другая часть микросейсм вследствие рефракции или отражения от нижележащих слоев возвращается к верхней границе и претерпевает повторные отражения и преобразования продольных волн в поперечные и наоборот. При этом могут образовываться поверхностные волны разных типов, которые могут распространяться на большие расстояния с малым затуханием (энергетический коэффициент затухания пропорционален 1/г). При этом образуются волны Релея, Стоунли и Лява. Скорость волн Релея всегда больше скорости звука в воде. Поэтому на достаточно высоких частотах, когда длина волны в водном слое соизмерима с глубиной океана, часть энергии волн Релея переходит в воду. Амплитуда волн при этом уменьшается. Оценки показывают, что влияние слоя воды при глубине океана 4 км начинает сказываться на частотах около 0,01 Гц. На частоте около 0,1 Гц волна, отраженная от поверхности жидкости, проходит на дно в противофазе, т.е. происходит максимальное подавление Релеевской волны. Наибольшее затухание при этом претерпевает основная мода, так как ее пучность расположена на границе вода - грунт. Высшие моды затухают меньше, поскольку имеется ряд пучностей этих мод в нижележащих слоях. За счет обмена акустической энергией между жидкостью и упругим основанием при достаточной глубине океана может возникнуть и распространяться вдоль дна поверхностная волна Стоунли. При этом вдоль вертикали по обе стороны границы располагаются неоднородные затухающие волны. При глубине океана 4 км образование волн Стоунли возможно на частотах начиная примерно с 1 Гц, а на частотах выше 10 Гц ограничивающим влиянием глубины океана можно пренебречь. Скорость волны Стоунли меньше скорости волн в воде и грунте, поэтому отсутствуют потери энергии за счет "вытекающих" волн. Отсюда следует, что возможное распространение волн Стоунли вдоль морского дна на большие расстояния на высоких частотах в отличие от волн Релея. Поверхностные волны Лява представляют собой поперечные колебания с горизонтальной поляризацией. Поэтому они не могут непосредственно возбуждаться волнами, падающими на границу из водной среды или за счет перепадов анемобарического давления. Их появление в составе микросейсм связано с преобразованием волн Релея н? неоднородностях земной коры, а также с сейсмической эмиссией из коры и верхней мантии.
Осуществление в известном способе регистрации фазы т с использованием волн накачки может привести к существенным трудностям при выделении предвестником цунами на комбинационных частотах в прибрежной зоне, из-за возможных проявлений влияния местных микросеймических волн.
Выявленных недостатков, присущих известным способам [1-13], лишен способ определения предвестников цунами (заявка RU №2010116097 от 29.04.2009 [18]), техническим результатом которого является повышение надежности и достоверности прогноза возникновения цунами за счет регистрации микросейсмических волн.
При этом технический результат достигается за счет того, что в способе определения предвестников цунами, включающем размещение в прибрежной зоне и на удалении от прибрежной зоны групп устройств регистрации сигналов на глубинных горизонтах наблюдений, равномерно распределенных по азимуту, соединение их трактом связи с внешними станциями приема и обработки сигналов путем поэтапного определения опасности возникновения цунами с определением динамических параметров сейсмических колебаний и их вариаций в каждом исследуемом пункте наблюдений в заданном частотном диапазоне с обработкой регистрируемых сигналов в высокочастотном и низкочастотном диапазонах сейсмических колебаний с выделением фаз сигналов, характеризующих приход волн, связанный с распространением в земной коре волн сжатия и поперечных волн, с регистрацией гидроакустических сигналов с PP, S и T-фазой, и размещением устройств регистрации на горизонтах наблюдений определяют приход акустической волны сейсмического происхождения по величине сдвига частоты рассеянного излучения, при этом посредством средств регистрации, размещенных в ближней зоне от очага землетрясения, выполняют анализ низкочастотных составляющих рассеянного сигнала, а в качестве опорных квазигармонических высокочастотных сигналов используют шумы судоходства; посредством средств регистрации, размещенных в прибрежной зоне, момент появления и направление прихода сейсмоакустических волн определяют путем узкополосной фильтрации и спектрального анализа волн, в котором выделение фаз типа РР, S и Т осуществляют путем узкополосной фильтрации посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой; регистрацию гидроакустических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпаденик сигналов тревоги по крайней мере в двух каналах из трех; спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли.
Совокупность отличительных признаков, заключающихся в том, что выделение фаз типа РР, S и Т осуществляют путем узкополосной фильтрации посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой; регистрацию гидроакустических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее, чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов тревоги по крайней мере в двух каналах из трех; спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли, позволяет повысить надежность и достоверность прогноза возникновения цунами за счет регистрации и последующей обработки всех зарегистрированных сейсмических волн, включая и микросейсмические волны различного происхождения.
Однако в задачах учета влияния катастрофических явлений, обусловленных подводными землетрясениями, весьма существенным фактором является установление возникновения волны цунами, что известным способом не решается.
Данная задача решается в известном техническом решении (патент RU №2457514С1, 27.07.2012 [19]), что позволяет повысить надежность и достоверность прогноза возникновения волн цунами при подводных землетрясениях.
Поставленная задача, в известном способе определения предвестника цунами [19], включающем размещение групп устройств регистрации сейсмических сигналов на глубинных горизонтах наблюдений в прибрежной зоне и на удалении от нее с целью поэтапного определения опасности возникновения цунами, соединение их трактом связи с внешними станциями приема и обработки сейсмических сигналов, регистрацию сейсмических сигналов, в котором устройства регистрации размещают на глубинных горизонтах наблюдений, кратных 25 м, при максимальном горизонте наблюдений, равном 100 м, равномерно распределенных по азимуту, регистрацию сейсмических сигналов выполняют с выделением фаз типа РР, S и Т, приход акустической волны сейсмического происхождения определяют по величине сдвига частоты рассеянного излучения, при этом посредством устройств регистрации, размещенных на удалении от прибрежной зоны, выполняют анализ низкочастотных составляющих рассеянного сигнала, используя в качестве опорных квазигармонических высокочастотных сигналов шумы судоходства, а посредством устройств регистрации, размещенных в прибрежной зоне, определяют момент появления и направление прихода сейсмических волн путем узкополосной фильтрации и спектрального анализа волн, выделение фаз типа РР, S и Т осуществляют путем узкополосной фильтрации посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой; регистрацию сейсмических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов тревоги по крайней мере в двух каналах из трех; спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли, решается за счет того, что посредством сейсмографов определяют координаты гипоцентра морского землетрясения и его магнитуду, при магнитуде землетрясения более 6, посредством группы устройств регистрации, размещенных на границе атмосфера - водная поверхность, дополнительно регистрируют скорость и направление ветра и морского волнения, влажность воздуха, атмосферное давление, барический градиент электрических разрядов в атмосфере, частоту звуковых волн в атмосфере, определяют коэффициент корреляции для измеренных значений скорости и направления ветра и морского волнения, влажности воздуха, атмосферного давления, барического градиента электрических разрядов в атмосфере, частоты звуковых волн в атмосфере, по которому оценивают возможность появления волны цунами.
Данный способ основан на том, что скорость распространения сейсмических волн много больше, чем скорость волн цунами. С помощью наземных сейсмографов определяются координаты гипоцентра морского землетрясения и его магнитуда.
Так как появление волны цунами характеризуется такими признаками, как:
- ненормально повышенная слышимость звуков в воздухе (1 Гц/с, до 60 Гц);
- резкое падение атмосферного давления в течение 6-12 часов;
- увеличение абсолютной влажности за 4 часа на 2 мм;
- электрические разряды в атмосфере имеют большой барический градиент, порядка 20-30 Мбар;
- увеличение скорости ветра (Справочник штурмана. Под ред. В.Д. Шандабылова. М. Военное издательство. 1968. с. 362-365), то по трассе возможного перемещения волны цунами, посредством средств измерения, размещенных на средствах регистрации (буйковых станциях) регистрируют такие параметры, как скорость и направление ветра и морского волнения, влажность воздуха, атмосферное давление, барический градиент электрических разрядов в атмосфере, частоту звуковых волн в атмосфере, определяют коэффициент корреляции для измеренных значений скорости и направления ветра и морского волнения, влажности воздуха, атмосферного давления, барического градиента электрических разрядов в атмосфере, частоты звуковых волн в атмосфере, по которому оценивают возможность появления волны цунами.
Однако, наряду с существенными преимуществами известного способа определения предвестника цунами [19], присутствует и существенный недостаток, заключающийся в том, что сейсмические приборы выдают предупреждение о цунами в течение 5-10 мин после окончания землетрясения, но зарегистрированные при этом сигналы не позволяют получить конкретную информацию о размере и охвате волны. Эта операция может занять более 20 мин. Кроме того, изменение уровня моря (океана) происходит не только при наличии волны цунами, но и при тропических и экваториальных приливах, обусловленных тропическими циклонами, что может привести к неоднозначному прогнозу.
При этом тропические циклоны в океанических районах между тропиками, имеют большой барический градиент (20-30 мб), большие скорости ветра (40-60, а иногда до 100 м/с), сравнительно малые поперечные размеры (100-300 миль), исключительно низкое давление в центре (900 мб и менее) - Справочник штурмана под общей редакцией Шандабылова В.Д. Военное издательство МО СССР. М., 1968, с. 362-365. Очаги зарождения тропических циклонов располагаются в Карибском море, Мексиканском заливе, Тихом океане (восточнее Филиппинских островов), Южно-Китайском море, Бенгальском заливе, южной части Индийского океана (в районе острова Маврикия).
Пути тропических циклонов практически постоянны (за редким исключением), скорость их перемещения составляет 10-12уз. Некоторые тропические циклоны имеют петлеобразные траектории.
Погода в зоне тропических циклонов характеризуется ветром ураганной силы густыми черными кучево-дождевыми облаками, сильнейшими ливнями, грозами, перистые облака в верхних слоях циклона выносятся на несколько сотен миль от центра циклона, в центре циклона (диаметр не более 10 миль) присутствует область штиля, облака разрежаются и иногда видно голубое небо («глаз бури»).
Признаками прцближения тропического циклона являются появление зыби от направления не совпадающего с направлением ветра, быстрое падение атмосферного давления, появление перистых, а затем но горизонте ливневых облаков, удушливая погода, затишье, частые и сильные электрические разряды в атмосфере, увеличение скорости ветра.
Тропические приливы проявляются при наибольшем склонении Луны. При тропических приливах увеличивается неравенство приливов по времени и высоте. Экваториальные приливы наблюдаются при склонении Луны, близком к нулю (Справочник вахтенного офицера, под общей редакцией Проничкина А.П. Военное издательство МО СССР, М.. 1975, с. 301).
Поэтому для достоверного прогноза необходимо выполнить анализ длинных волн, образующихся в результате цунами и тропических циклонов.
Задачей предлагаемого технического решения является повышение достоверности прогноза цунами с одновременным расширением функциональных возможностей способа определения предвестника цунами. При этом в качестве прототипа выбран способ определения предвестника цунами [19].
Поставленная задача решается за счет того, что в способе обнаружения возможностг наступления катастрофических явлений, в том числе и определение предвестника цунами, включающем размещение групп устройств регистрации сейсмических сигналов на глубинных горизонтах наблюдений в прибрежной зоне и на удалении от нее с целью поэтапного определения опасности возникновения цунами, соединение их трактом связи с внешними станциями приема и обработки сейсмических сигналов, регистрацию сейсмических сигналов, в котором устройства регистрации размещают на глубинных горизонтах наблюдений, кратных 25 м, при максимальном горизонте наблюдений, равном 100 м, равномерно распределенных по азимуту, регистрацию сейсмических сигналов выполняют с выделением фаз типа РР, S и Т, приход акустической волны сейсмического происхождения определяют по величине сдвига частоты рассеянного излучения, при этом посредством устройств регистрации, размещенных на удалении от прибрежной зоны, выполняют анализ низкочастотных составляющих рассеянного сигнала, используя в качестве опорных квазигармонических высокочастотных сигналов шумы судоходства, а посредством устройств регистрации, размещенных в прибрежной зоне, определяют момент появления и направление прихода сейсмических волн путем узкополосной фильтрации и спектрального анализа волн, выделение фаз типа РР, S и Т осуществляют путем узкополосной фильтрации посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой; регистрацию сейсмических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов тревоги по крайней мере в двух каналах из трех; спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли, решается за счет того, что посредством сейсмографов определяют координаты гипоцентра морского землетрясения и его магнитуду, при магнитуде землетрясения более 6, посредством группы устройств регистрации, размещенных на границе атмосфера - водная поверхность, дополнительно регистрируют скорость и направление ветра и морского волнения, влажность воздуха, атмосферное давление, барический градиент электрических разрядов в атмосфере, частоту звуковых волн в атмосфере, определяют коэффициент корреляции для измеренных значений скорости и направления ветра и морского волнения, влажности воздуха, атмосферного давления, барического градиента электрических разрядов в атмосфере, частоты звуковых волн в атмосфере, по которому оценивают возможность появления волны цунами, в котором в отличие от прототипа [19], дополнительно выделяют длинные волны в диапазоне 4-28 Гц, фазовые скорости, которых варьируются в диапазоне 350-700 м/с, выделяют свободные гравитационные волны, возбуждаемые сейсмическими поверхностными волнами по различию фазовых скоростей, которые служат сигналом о приближении цунами, при обнаружении волны цунами в открытом океане высотой до 1 м и двигающейся со скоростью 500-700 км/час измеряют скорость и высоту этой волны, по изменению скорости до 30-60 км и увеличению высоты волны до 30-40 м судят о ее приближении к береговой линии, дополнительно выделяют длинные волны, возникающие при тропических приливах, которые проявляются при наибольшем склонении Луны и при увеличении неравенства приливов по времени и высоте, и возникающие при экваториальных приливах, которые наблюдаются при склонении Луны, близком к нулю, формируют архив полей приводного атмосферного давления и гидростатического давления по срочным данным в районе формирования тропических циклонов, по измерениям, выполненным, посредством метеорологических радиолокационных станций с двойной поляризацией, СВЧ - радиометров и альтиметрических метеорологических спутников классифицируют тип облачности и дождевых осадков, по результатам измерений посредством датчиков, размещенных на дрейфующих буях, находящихся между тропиками выделяют зоны с барическим градиентом 20-30 мб, скоростью ветра 40-100 м/с, атмосферным давлением в центре тропического циклона 900 мб и менее, характеризующиеся интенсивным изменением разности между температурой воздуха, имеющего тренд в сторону падения температуры и температурой водной поверхности, имеющей тренд в сторону повышения температурь: на глубинах до 60 м в центре тропического циклона, связь между дрейфующими буями и опорными пунктами осуществляют посредством радиометеорного канала связи, выполняют оценку погрешности прогноза, путем построения базовой интерполяционной модели типа кригинг, при сравнении статистических характеристик погоды строят сетку гексанов в виде равных правильных шестиугольников, которые получают путем триангуляции сферы методом рекурсивного разбиения, при составлении прогнозов для районов, подверженных влиянию местных признаков погоды вносят соответствующую корректуру в прогностические значения, дополнительно создают полноформатную матрицу рисков и ущерба для объектов хозяйственной деятельности на основе критериев неблагоприятных условий и данных об аварийности элементов и объектов инфраструктуры посредством статистического и эконометрического моделирования.
Способ реализуется следующим образом.
Как и в прототипе, размещают средства регистрации сейсмических сигналов, представляющие собой широкополосные донные сейсмографы непосредственно на границе вода - грунт в прибрежной зоне и на удалении от прибрежной зоны, а также на разных горизонтах по глубине с использованием для установки автономных донных станций, подводных обсерваторий, заякоренных платформ. Аналогом широкополосных сейсмографов являются широкополосные сейсмографы типа ЭХП-17, ЭХП-20.
В качестве носителей средств измерения необходимых гидрометеорологических параметров могут быть использованы стационарные или дрейфующие буи различных конструкций (Лобковский Л.И. и др. Геоэкологический мониторинг морских нефтегазовых акваторий. Наука. М., 2005, с. 77-82, патенты RU №2304794 С2. 20.08.2007, №2328757С2, 10.07.2008, №2432589 С1, 20.08.2013) и оснащенные измерителями скорости и направления ветра, уровня моря, влажности, температуры морской воды и воздуха, атмосферного и гидростатического давления, электропроводности, а также метеорологические радиолокационные станции с двойной поляризацией и СВЧ -радиометры (патент RU №2574167 С1, 10.02.2016), позволяющие классифицировать тип облачности и дождевых осадков, а также альтиметрические метеорологические спутники.
На береговых станциях устанавливают широкополосные сейсмографы типа "G.Streckeisen messgeratebau" (Швейцария) и "Guralp" (Англия), типа STS-1 и CMG-3. выполняют регистрацию сейсмических сигналов с выделением фаз типа рр, s, и т при этом регистрируют сейсмические шумы на частотах 0,008-20 Гц, гидродинамический шум моря на частотах 0,01-100 Гц, давление волн цунами на дно на частотах 0,01-0,01 Гц.
Сигнал Т-фазы, принятый в береговом клине, определяется в диапазоне частот 34-75 Гц при частоте квантования 160 Гц методом псевдодифференциального параболического уравнения, обеспечивающего выделение звуковых полей в двумерном неоднородном океане с переменными рельефом дна и профилем скорости звука с заданной точностью для любого диапазона углов скольжения локальных нормальных волн с учетом взаимодействия между ними. Так как наблюдаемый сигнал s(t) является суммой сигналов от последовательно возбуждаемых слоев, то, представляя сигнал в виде вектора столбца временных отсчетов и обозначая через sj векторы-столбцы сигналов от последовательно возбуждаемых слоев, имеем s(s1, s2, … sn), (a1, а2, … аn), ai - суть амплитуды рассеивателей. В качестве решающей статистики используют сумму квадратов амплитуд, имеющую максимальное значение для сигнала ожидаемой структуры. Оценку получают методом наименьших квадратов, так как система линейных уравнений является неопределенной. Выполняя оценку для каждого момента времени, получают ее временную зависимость. Присутствие в ней максимума означает наличие в источнике ожидаемой структуры возбуждения звукового поля. При построении графика решающей статистики абсцисса глобального максимума соответствует времени прихода совокупного рассеянного сигнала.
Определяют приход акустической волны сейсмического происхождения по величине сдвига частоты рассеянного излучения, при этом посредством средств регистрации, размещенных в ближней зоне от очага землетрясения на внешних станциях приема и обработки сигналов, выполняют анализ низкочастотных составляющих рассеянного сигнала, а в качестве опорных квазигармонических высокочастотных сигналов используют шумы судоходства, а посредством средств регистрации, размещенных в прибрежной зоне, определяют момент появления и направление прихода сейсмоакустических волн путем узкополосной фильтрации и спектрального анализа. Выделение фаз типа РР, S и Т осуществляют путем узкополосной фильтрации посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой. Регистрацию сейсмических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов тревоги по крайней мере в двух каналах из трех.
Спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли.
При регистрации сейсмических сигналов на дне одним из важных направлений использования широкополосных донных сейсмографов является исследование микросейсмических шумов, возбуждаемых морскими и океаническими волнами, микросейсмы проявляются в широком диапазоне частот и служат естественным фоном, который определяет порог чувствительности сейсмографов. При этом также выполняется регистрация характерных микросейсм с периодом около 6 секунд, также выявляются микросейсмы с периодами 20 и 100 секунд, что позволяет выделить как объемные Р и S волны, так и поверхностные волны Лява (колебания в диапазоне частот 0,0125-0,05 Гц), Релея и Стоунли (1-1 Гц).
Далее, в случае обнаружения катастрофического землетрясения (с магнитудой от 6 до 8), донные станции с помощью датчиков сильных движений регистрируют элементы движения дна и с помощью канала гидроакустической связи передают информацию на группу устройств регистрации, размещенных на водной поверхности, выполненные в виде поверхностных буев и через спутниковые или радиоканалы связи на внешние станции приема информации.
Сигналы сейсмического происхождения регистрируют с помощью широкополосных сейсмографов с частотным диапазоном от тысячных долей герца до десятков герц, которые получили в настоящее время повсеместное распространение как основной инструмент сейсмологических исследований (Рыков А.В. Моделирование сейсмометра // м.: ОИФЗ РАН, 1995. 87 с. Usher M.J., R.F. Burch, C.Gurlap.Wide-band feedback seismometers // phys. earth planet, interiors. 1979. v. 18, p.38-50. Wielandt E., Stein I.M. A digital very-broad band seismograph // Annales geophysical. 1986. v.4. p.227-232). с помощью этих приборов регистрируются сигналы как местных, так и удаленных землетрясений и определяют координаты эпицентра землетрясения, путем преобразования по частоте в измерительном канале принимаемого гидроакустического сигнала.
Группа устройств регистрации представляет собой дрейфующие буи, снабженные каналами гидроакустической и спутниковой связи, сейсмическими датчиками гидрофонного и геофонного типа, измерительными датчиками атмосферного давления, относительной влажности, барического градиента электрических разрядов, скорости и направления ветра, скорости, направления и высоты морских волн, частоты звуковых волн в атмосфере.
Аналогом дрейфующего буя является устройство, которое состоит из корпуса цилиндрической формы, мачты с передающим устройством передачи информации, измерителя параметров ветра, измерителя параметров атмосферного давления с баропортом, датчиков температуры воздуха и воды, маячка, радиолокационного углового отражателя, модуля управления с опционным блоком GPS, блока информационной памяти, центрального модуля с контроллером, измерителя высоты волны и ориентации буя, датчика скорости и направления течения, датчиков определения солености, электропроводности, мутности, содержания кислорода, содержания ионов РН, контроллера процессов окисления/восстановления, источника питания (патент RU №2328757).
Благодаря тому, что конструкция дрейфующего буя определена исходя из требований функционального назначения, заключающегося в возможности более точного определения параметров волнения, в частности высоты и периода волн, а также исходя из требования, заключающегося в надежной передаче по спутниковому радиоканалу измеренной информации при наличии качки, что позволяет исключить ошибки измерения в изменяющихся погодных условиях регистрации измеряемых сигналов. Кроме того определяют среднюю фазовую скорость распространения волны и среднюю длину волны на всех стадиях развития волнового процесса от его зарождения до его полного затухания, путем измерения перемещения возвышений морской поверхности в трех направлениях и последующего построения динамико - стохастической модели движущейся морской волновой поверхности в пространственно- временном интервале.
Измерительная схема дрейфующего буя включает модуль управления с опционным блоком GPS, блок информационной памяти, центральный модуль с контроллером, измеритель высоты волны и ориентации буя, датчик скорости и направления течения, датчик определения солености, датчик электропроводности, датчик определения мутности воды, датчик содержания кислорода, датчик содержания ионов РН, контроллера процессов окисления/восстановления, источник питания, измерительные датчики температуры воздуха и морской воды, измеритель параметров ветра, датчик атмосферного давления с баропортом, гидрофон и геофон, гидроакустический канал связи.
Центральный модуль с контроллером включает встроенный 8-канальный 16-разрядный АЦП типа AD 7715 с внешним входами для подключения датчиков, автономную систему контроля напряжения питания, внутренний температурный датчик на базе кремневого диодного р-n перехода, два компаратора с программируемым опорным напряжением, мультиплексор, последовательный интерфейс стандарта RS-232, три таймера, обеспечивающих измерение частоты относительно опорного кварцевого генератора, и представляет собой процессор с раздельными 14-битной шиной команд и 8-битной шиной данных. Двухступенчатый конвертор позволяет осуществлять выполнение до 35 команд в течение одного машинного цикла. Аналогом является микропроцессор типа PJC 14000.
Центральный модуль осуществляет организацию режима измерения гидрофизических параметров, обработку результатов измерений, формирование сигналов обмена с внешними устройствами и пакета данных в заданном формате, хранение в памяти для последующей передачи по спутниковому каналу связи на внешние станции приема.
Основными функциями, определяющими алгоритм работы центрального модуля, являются последовательное включение энергопитания и опрос выходных сигналов первичных датчиков в соответствии с заданной программой, осреднение результатов измерения по каждому каналу в соответствии с заданными временными интервалами, введение поправок в результаты измерений, учитывающие дрейф нуля АЦП, отклонение характеристик преобразования от исходной, температурную зависимость характеристик датчиков с представлением данных в виде условных кодов, приведение условных кодов измеренных величин к физическим значениям гидрометеорологических параметров в соответствии с алгоритмом обработки данных с установленными градуировочными коэффициентами датчиков, запись и хранение полученных данных в буферной памяти микропроцессора, формирование сообщения установленного формата для передачи в спутниковый канал связи. В состав программного обеспечения входят мощный микроассемблер, внутрисистемный и отладочный эмуляторы, универсальный программатор и компилятор.
В случае катастрофического землетрясения (с магнитудой около 8) донные станции с помощью датчиков сильных движений регистрируют элементы движения дна и с помощью канала гидроакустической связи передают информацию на поверхностный буй и через спутниковые или радиоканалы связи на наземные пункты управления.
Посредством датчиков, размещенных на дрейфующих буях, регистрируют частоту звука в воздухе, которая при возникновение и распространение волны цунами повышается на 1 Гц/с, скорость и направление ветра, скорость, направление и высоту морских волн, атмосферное давление, влажность воздуха, барический градиент электрических разрядов в воздухе и по каналу спутниковой связи передают в наземные пункты управления, на которых выполняют анализ зарегистрированных сигналов, включая сейсмические сигналы.
При выявлении тенденции повышения слышимости звуков в воздухе, скорости ветра, скорости и высоты морских волн, увеличения абсолютной влажности (на 2 мм за 4 ч) и появления атмосфере электрических разрядов с барическим градиентом порядка 20-30 мбар, на внешних станциях приема строят графики изменения, зарегистрированных параметров во времени, определяют коэффициенты корреляции и выносят суждение о возможности появления волны цунами и маршруте ее движения.
Дополнительно выделяют длинные волны в диапазоне 4-28 Гц, фазовые скорости, которых варьируются в диапазоне 350-700 м/с.Далее выделяют свободные гравитационные волны, возбуждаемые сейсмическими поверхностными волнами по различию фазовых скоростей, которые служат сигналом о приближении цунами. При обнаружении волны цунами в открытом океане высотой до 1 м и двигающейся со скоростью 500-700 км/час измеряют скорость и высоту этой волны, по изменению скорости до 30-60 км и увеличению высоты волны до 30-40 м судят о ее приближении к береговой линии. Дополнительно выделяют длинные волны, возникающие при тропических приливах, которые проявляются при наибольшем склонении Луны и при увеличении неравенства приливов по времени и высоте, и возникающие при экваториальных приливах, которые наблюдаются при склонении Луны, близком к нулю. Формируют архив полей приводного атмосферного давления и гидростатического давления по срочным данным в районе формирования тропических циклонов. Выполняют измерения, по результатам измерений которых, посредством метеорологических радиолокационных станций с двойной поляризацией, СВЧ - радиометров и альтиметрических метеорологических спутников классифицируют тип облачности и дождевых осадков.
По результатам измерений посредством датчиков, размещенных на дрейфующих буях, находящихся между тропиками, выделяют зоны с барическим градиентом 20-30 мб, скоростью ветра 40-100 м/с, атмосферным давлением в центре тропического циклона 900 мб и менее, характеризующиеся интенсивным изменением разности между температурой воздуха, имеющего тренд в сторону падения температуры и температурой водной поверхности, имеющей тренд в сторону повышения температуры на глубинах до 60 м в центре тропического циклона. Связь между дрейфующими буями и опорными пунктами осуществляют посредством радиометеорного канала связи. Выполняют оценк>погрешности прогноза. При составлении прогнозов для районов, подверженных влиянию местных признаков погоды вносят соответствующую корректуру в прогностические значения. Дополнительно создают полноформатную матрицу рисков и ущерба для объектов хозяйственной деятельности на основе критериев неблагоприятных условий и данных об аварийности элементов и объектов инфраструктуры посредством статистического и эконометрического моделирования.
Весь массив измеренных гидрометеорологических характеристик поступает в главный ситуационный центр для данного региона, обеспечивающей получение, обработку, регистрацию, отображение и выдачу потребителям следующей информации: гидрометеорологических параметров окружающей среды; метеорологической информации от метеорологических искусственных спутников (МИСЗ) типа «Метеор», «NOAA» в виде снимков подстилающей поверхности и облачного покрова Земли; факсимильной и телеграфной информации от радиометеорологических центров (РМЦ). Аппаратные и программные устройства обеспечивают измерение, вычисление, отображение и регистрацию следующих гидрометеорологических параметров окружающей среды: скорости кажущегося ветра (для дрейфующей платформы); направления кажущегося ветра (для дрейфующей платформы); скорости истинного ветра; направления истинного ветра; атмосферного давления; температуры воздуха; относительной влажности воздуха; высоты нижней границы облаков; метеорологической (оптической) дальности видимости; прием, обработку и отображение гидрометеорологической информации, поступающей от МИСЗ типа «Метеор», «NOAA» в международном аналоговом формате APT, факсимильной и телеграфной информации от РМЦ, принимаемой в форматах FAX и RTTY. Погрешность выработки параметров приведена в таблице.
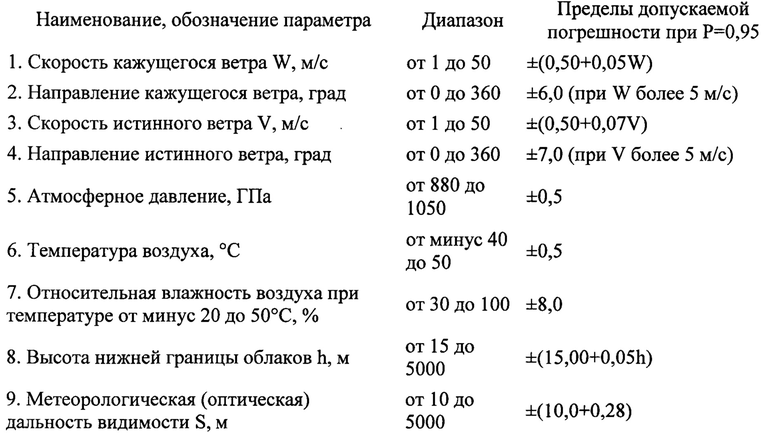
Период обновления отображаемой информации о текущих значениях параметров кажущегося и истинного ветра, атмосферном давлении, температуре и влажности воздуха, высоте нижней границы облаков и метеорологической (оптической) дальности видимости не превышает 5 с.
Одновременно с выполненными измерениями принимают информацию от метеорологических спутников Земли, радиометеорологических центров и метеорологических локаторов.
Обрабатывают измеренную и принятую информацию от внешних источников информации. При обработке информации, полученной от нескольких метеорадиолокаторов, определяют метеорологический потенциал для каждой станции. Посредством метеорологического потенциала можно сравнить различные радиолокаторы с точки зрения их эффективности для метеорологических наблюдений. При этом, чем больше потенциал, тем лучше станция приспособлена для метеорологических наблюдений (Брылев Г.Б., Гашина СБ., Низдойминога Г.Д. Радиолокационные характеристики облаков и осадков. - Л.: Гидрометеоиздат, 1986. - 231 с.. [39]). При обработке информации, полученной от радиолокаторов, информацию, полученную от радиолокатора центральной станции, имеющего больший потенциал, принимают за эталонную, относительно которой выполняется последующая обработка. Скорость, направление и продолжительность ветра фиксируют не менее чем на трех высотных эшелонах 3-40 м, 30-450 м (путем непосредственных измерений посредством датчиков), 0,5-400 км (косвенным путем посредством обработки информации, полученной от метеолокаторов.
Измеренные параметры наносят на метеокарты, полученные от внешних источников информации. На эти же карты наносят сезонные параметры, полученные за многолетние наблюдения в данном районе и хранящиеся в ПЗУ процессорного блока. При этом выполняют оценку погрешности прогностических значений, путем построения базовой интерполяционной модели типа кригинг. При сравнении статистических характеристик погоды строят сетку гексанов в виде равных правильных шестиугольников, которые получают путем триангуляции сферы методом рекурсивного разбиения, при составлении прогнозов для районов, подверженных влиянию местных признаков погоды вносят соответствующую корректуру в прогностические значения. Далее выполняют оценку погрешности прогностических значений. Оценку погрешности прогностических значений выполняют в соответствии с зависимостями (1-5), исходя из того, что основным инструментом количественного описания изменчивости в геостатистике является вариограмма- статистический двухточечный момент второго порядка.
Так как вариограмма представляет собой аналитическую функцию, описывающую пространственную корреляционную структуру данных, то на практике эту функцию оценивают путем сглаживания «экспериментальной» вариограммы γ(r) по N точечным измерениям по формуле (Демьянов В.В. Геостатика: теория и практика. М.: Наука, 2010 - 327 с):

где r - расстояние от точки измерения х, Z - величина измерения. Эта функция характеризует степень различия данных в зависимости от расстояния между ними. Чем ближе значения данных (меньше разница между ними), тем больше значение вариограммы.
Базовой интерполяционной моделью дискретных наблюдений геостатистики является кригинг (Krige D.G. A statistical approach to some basic mine valuation problems on the Witwatersrand // J. of the Chem., Metal, and Mining Soc. of South Africa. - 1951. - Vol.52. - p.119-139).
Выделяют несколько вариантов моделей кригинга (простой, обычный, универсальный, логнормальный, невязок и др.), которые различаются принятыми предположениями и используемой информации о моделируемой переменной. Кригинг использует вариограмму в качестве основного параметра и является основой всех методов, связанных с геостатистикой- интерполяции, вероятностного картографирования, стохастического моделирования.
Решение задачи кригинга наиболее просто описать как решение задачи нахождения некоторой линейного функционала  от неизвестной функции Z(x) заданной в некотором объеме V по ее N измерениям Zi (i=1, …, N). Формально это можно записать в виде
от неизвестной функции Z(x) заданной в некотором объеме V по ее N измерениям Zi (i=1, …, N). Формально это можно записать в виде

Для оценки Y запишем взвешенное среднее по измерением в виде  , где λi - факторы взвешивания. По договоренности звездочка в геостатистической литературе используется для обозначения оценочного значения как противопоставление действительному, но неизвестному значению. Решение (3) предполагает определение лучшего способа выбора факторов взвешивания. В кригинге веса выбираются такие, чтобы оценка была несмещенной, то есть, чтобы математическое ожидание E удовлетворяло условию:
, где λi - факторы взвешивания. По договоренности звездочка в геостатистической литературе используется для обозначения оценочного значения как противопоставление действительному, но неизвестному значению. Решение (3) предполагает определение лучшего способа выбора факторов взвешивания. В кригинге веса выбираются такие, чтобы оценка была несмещенной, то есть, чтобы математическое ожидание E удовлетворяло условию:

и с минимальной дисперсией:

где Var - символ выборочной дисперсии. Реальная оценка выражения (5) называется ошибкой кригинга.
Выполняют анализ на содержание аномальных значений, характеризующих опасные явления, путем построения полуэмпирической модели колебаний уровня течений и волнений в зависимости от скорости, направления и продолжительности ветра. При этом верикацию полуэмпирической модели выполняют на основе многолетних гидрометеорологических наблюдений для конкретного района.
При прогнозировании опасных и особо опасных явлений, по полученным результатам измерений, строят карты распределения аддитивных показаний и отождествляют явления, характеризующиеся распределением аномальных значений аддитивных показателей.
Блоки обмена данными выполнены в форматах GSM - связи, спутниковой связи и метеорной связи в УКВ диапазоне.
Метеорная радиосвязь в УКВ диапазоне основана на явлении отражения радиоволн от ионизированных следов, оставляемых микрометеорами при вхождении в атмосферу Земли с последующим их разложением. Количество метеоров, попадающих в земную атмосферу, в среднем, является достаточно постоянной величиной, благодаря которой возникающие в ионосфере возмущения обеспечивают непрерывность передачи информационных данных по этому каналу связи. Высота расположения отражающего метеорного слоя от поверхности Земли составляет 80-150 км. С учетом кривизны земной поверхности и высоты метеорного слоя дальность действия отраженного УКВ-радиосигнала достигает 2000 км.
Средства метеорной связи обеспечивают повышенную, по сравнению с коротковолновой радиосвязью, устойчивость при ионосферных возмущениях естественного, а также искусственного происхождения отсутствие «мертвых зон» в пределах всей зоны обеспечения; повышенную, по сравнению с другими видами связи помехозащищенность; простоту построения системы передачи данных от удаленных необслуживаемых объектов; более низкие требования к качеству электропотребления; сравнительно низкую стоимость аппаратуры и высокие экономические показатели функционирования системы метеорной связи по критерию эффективность/стоимость для труднодоступных районов и районов со слабо развитой инфраструктурой.
«Метеорный режим», использующий эффект отражения радиоволн от метеорного слоя Земли, является в данной системе связи основным. Одновременно с ним эта система может работать и в прямом режиме не отраженной «поверхностной волной» на дистанциях до 100 км над земной поверхностью (без ретрансляторов) и до 300 км над водными акваториями (в зависимости от солености воды). С использованием ретрансляторов пространственный охват данного вида связи может быть многократно увеличен. Экспериментальные образцы аппаратуры метеорной связи, прошли испытания и на линии «радиобуй - базовая станция», при этом получены дальности взаимной непрерывной связи поверхностной волной 120 км (не предельная дистанция). Система для организации связи по метеорному каналу в УКВ диапазоне, имеет в своем составе на каждую головную (ведущую) станцию до 128 ведомых стационарных или мобильных (подвижных) станций в радиусе до 1800-2000 км. В свою очередь, все ведомые станции в такой системе имеют возможность обеспечивать УКВ связь между собой поверхностной волной в радиусе до 80-100 км на суше и до 200-300 км в море. В предлагаемом варианте информационного взаимодействия функции ведомых мобильных (подвижных) станций, работающих в режиме поверхностной волны УКВ диапазона, будут выполнять транзитные суда, оборудованные конвенционной аппаратурой ЭКНИС. На подвижных гидрометеорологических и базовых станциях установлено телекоммуникационное оборудование сети WiMAX, обеспечивающее соединения базовых станций с подвижными объектами посредством широкополосного радиодоступа. Диспетчерская станция установлена стационарно в опорной точке с известными географическими координатами и содержит Геоинформационную систему (ГИС), оборудование для синхронизации по времени навигационного оборудования искусственных спутников Земли с оборудованием сети WiMAX, а также блок обработки информации с программным обеспечением, обеспечивающим совместную работу навигационного оборудования искусственных спутников Земли и сети WiMAX, при этом в качестве искусственных спутников Земли используют глобальную навигационную спутниковую систему ГЛОНАСС. При реализации предлагаемого способа обеспечивается надежная регистрация и классификация цунамигенных землетрясений и зарождения тропических циклонов, что позволяет давать своевременное (в течение нескольких минут) предупреждение об опасности цунами и тропических циклонов.
Источники информации
1. Патент RU №22082184.
2. Патент RU №2066467.
3. Авторское свидетельство SU №1300393.
4. Патент RU №22066466.
5. Авторское свидетельство SU №251694.
6. Патент RU №1787273.
7. Патент RU №1787276.
8. Патент RU №1787275.
9. Патент RU №1787274.
10. Патент RU №2030769.
11. Патент RU №2319984 С2, 20.03.2008.
12. Патент RU №2030766.
13. Walker D.F. and Bernard E.N. Comparison of t-phase spectra and tsunami. Amplitudes for tsunamigenic and other earthquakes. J. Geophys. Res., 98, c7, p.12557-12565, 1993.
14. Okal E.A. Seismic parameters controlling far-field tsunami amplitudes: A Review. Nat. Hazards. 1, p.69-96,1988.
15. Патент RU №2292569.
16. Левин Б.В., Носов M.A. Физика цунами, M.: Янус - К, 2005. 360 с.
17. Рабинович А.Б. Длинные гравитационные волны в океане: захват, резонанс, излучение. СПб.: Гидрометеоиздат, 1993, 325 с.
18. Заявка SU №2010116097, 29.04.2009.
13. Патент RU №2457541 С1, 27.07.2012.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
| Способ определения опасности цунами | 2020 |
|
RU2738589C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2455664C1 |
| Дрейфующая буйковая гидроакустическая станция для определения предвестников сильных землетрясений и цунами на акваториях с ледовым покровом | 2021 |
|
RU2770130C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2011 |
|
RU2451310C1 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2005 |
|
RU2292569C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2011 |
|
RU2462734C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2012 |
|
RU2521762C1 |
Изобретение относится к области сейсмологии, а именно к способам определения предвестников цунами и тропических циклонов. Заявлен способ определения предвестника цунами, включающий размещение групп устройств регистрации сейсмических сигналов на глубинных горизонтах наблюдений в прибрежной зоне и на удалении от нее с целью поэтапного определения опасности возникновения цунами, cоединение их трактом связи с внешними станциями приема и обработки сейсмических сигналов, регистрацию сейсмических сигналов. Дополнительно регистрируют скорость и направление ветра и морского волнения, влажность воздуха, атмосферное давление, барический градиент электрических разрядов в атмосфере, частоту звуковых волн в атмосфере, определяют коэффициент корреляции для измеренных значений скорости и направления ветра и морского волнения, влажности воздуха, атмосферного давления, барического градиента электрических разрядов в атмосфере, частоты звуковых волн в атмосфере, по которому оценивают возможность появления волны цунами. Дополнительно выделяют длинные волны в диапазоне 4-28 Гц, фазовые скорости, которых варьируются в диапазоне 350-700 м/с, выделяют свободные гравитационные волны, возбуждаемые сейсмическими поверхностными волнами по различию фазовых скоростей, которые служат сигналом о приближении цунами. При обнаружении волны цунами в открытом океане высотой до 1 м и двигающейся со скоростью 500-700 км/час измеряют скорость и высоту этой волны. По изменению скорости до 30-60 км и увеличению высоты волны до 30-40 м судят о ее приближении к береговой линии. Дополнительно выделяют длинные волны, возникающие при тропических приливах, которые проявляются при наибольшем склонении Луны и при увеличении неравенства приливов по времени и высоте, и возникающие при экваториальных приливах, которые наблюдаются при склонении Луны, близком к нулю. Формируют архив полей приводного атмосферного давления и гидростатического давления по срочным данным в районе формирования тропических циклонов по измерениям, выполненным посредством датчиков, размещенных на дрейфующих буях, находящихся между тропиками. Классифицируют тип облачности и дождевых осадков, по результатам измерений, посредством метеорологических радиолокационных станций с двойной поляризацией, СВЧ-радиометров и альтиметрических метеорологических спутников. По результатам измерений выделяют зоны с барическим градиентом 20-30 мб, скоростью ветра 40-100 м/с, атмосферным давлением в центре тропического циклона 900 мб и менее. Связь между дрейфующими буями и опорными пунктами осуществляют посредством радиометеорного канала связи. Выполняют оценку погрешности прогноза путем построения базовой интерполяционной модели типа кригинг. При сравнении статистических характеристик погоды строят сетку гексанов в виде равных правильных шестиугольников, которые получают путем триангуляции сферы методом рекурсивного разбиения. При составлении прогнозов для районов, подверженных влиянию местных признаков погоды, вносят соответствующую корректуру в прогностические значения. Технический результат - повышение достоверности прогноза цунами с одновременным расширением функциональных возможностей способа определения предвестника цунами. 1 табл.
Способ обнаружения возможности наступления цунами, включающий размещение групп устройств регистрации сейсмических сигналов на глубинных горизонтах наблюдений в прибрежной зоне и на удалении от нее с целью поэтапного определения опасности возникновения цунами, соединение их трактом связи с внешними станциями приема и обработки сейсмических сигналов, регистрацию сейсмических сигналов, в котором устройства регистрации размещают на глубинных горизонтах наблюдений, кратных 25 м, при максимальном горизонте наблюдений, равном 100 м, равномерно распределенных по азимуту, регистрацию сейсмических сигналов выполняют с выделением фаз типа РР, S и Т, приход акустической волны сейсмического происхождения определяют по величине сдвига частоты рассеянного излучения, при этом посредством устройств регистрации, размещенных на удалении от прибрежной зоны, выполняют анализ низкочастотных составляющих рассеянного сигнала, используя в качестве опорных квазигармонических высокочастотных сигналов шумы судоходства, а посредством устройств регистрации, размещенных в прибрежной зоне, определяют момент появления и направление прихода сейсмических волн путем узкополосной фильтрации и спектрального анализа волн, выделение фаз типа РР, S и Т осуществляют путем узкополосной фильтрации посредством рекурсивных фильтров Баттерфорта, при этом входную фильтрацию осуществляют посредством рекурсивных фильтров с целочисленными коэффициентами, а сигналы с частотой дискретизации 100 Гц и ниже подвергают фильтрации с коэффициентами в виде чисел с плавающей запятой, регистрацию сейсмических сигналов осуществляют посредством широкополосных донных сейсмографов с не менее чем тремя сейсмическими каналами, при этом сигналы анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается при совпадении сигналов тревоги по крайней мере в двух каналах из трех, спектральный анализ выполняют как объемных волн фаз РР и S, так и поверхностных волн Лява, Релея и Стоунли, посредством сейсмографов определяют координаты гипоцентра морского землетрясения и его магнитуду, при магнитуде землетрясения более 6 посредством группы устройств регистрации, размещенных на границе атмосфера - водная поверхность, дополнительно регистрируют скорость и направление ветра и морского волнения, влажность воздуха, атмосферное давление, барический градиент электрических разрядов в атмосфере, частоту звуковых волн в атмосфере, определяют коэффициент корреляции для измеренных значений скорости и направления ветра и морского волнения, влажности воздуха, атмосферного давления, барического градиента электрических разрядов в атмосфере, частоты звуковых волн в атмосфере, по которому оценивают возможность появления волны цунами, отличающийся тем, что дополнительно выделяют длинные волны в диапазоне 4-28 Гц, фазовые скорости которых варьируются в диапазоне 350-700 м/с, выделяют свободные гравитационные волны, возбуждаемые сейсмическими поверхностными волнами по различию фазовых скоростей, которые служат сигналом о приближении цунами, при обнаружении волны цунами в открытом океане высотой до 1 м и двигающейся со скоростью 500-700 км/час измеряют скорость и высоту этой волны, по изменению скорости до 30-60 км и увеличению высоты волны до 30-40 м судят о ее приближении к береговой линии, дополнительно выделяют длинные волны, возникающие при тропических приливах, которые проявляются при наибольшем склонении Луны и при увеличении неравенства приливов по времени и высоте, и возникающие при экваториальных приливах, которые наблюдаются при склонении Луны, близком к нулю, формируют архив полей приводного атмосферного давления и гидростатического давления по срочным данным в районе формирования тропических циклонов по измерениям, по результатам измерений, выполненных посредством метеорологических радиолокационных станций с двойной поляризацией, СВЧ-радиометров и альтиметрических метеорологических спутников классифицируют тип облачности и дождевых осадков, по результатам измерений посредством датчиков, размещенных на дрейфующих буях, находящихся между тропиками, выделяют зоны с барическим градиентом 20-30 мб, скоростью ветра 40-100 м/с, атмосферным давлением в центре тропического циклона 900 мб и менее, характеризующиеся интенсивным изменением разности между температурой воздуха, имеющего тренд в сторону падения температуры, и температурой водной поверхности, имеющей тренд в сторону повышения температуры на глубинах до 60 м в центре тропического циклона, связь между дрейфующими буями и опорными пунктами осуществляют посредством радиометеорного канала связи, выполняют оценку погрешности прогноза, при составлении прогнозов для районов, подверженных влиянию местных признаков погоды, вносят соответствующую корректуру в прогностические значения.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦУНАМИ | 2007 |
|
RU2362190C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЛНЫ ЦУНАМИ ПО АНОМАЛЬНОЙ АКУСТИЧЕСКОЙ ЭМИССИИ В АТМОСФЕРЕ, ГИДРОСФЕРЕ И ЛИТОСФЕРЕ | 2007 |
|
RU2356073C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПАСНОСТИ ЦУНАМИ | 2004 |
|
RU2260819C1 |
| US 20080270034 A1, 30.10.2008 | |||
| DE 102015000306 A1, 29.12.2016. | |||

