Изобретение относится к области авиации тактического назначения, в частности к системам управления вооружением.
Известны современные многофункциональные (одноместные боевые и двухместные учебно-боевые) самолеты - аналоги ("Еврофайтер 2000", МиГ-29, Су-27, Макдоннел - Дуглас F/A-18A, Макдоннел - Дуглас YF-23A, Дассо "Рафаль", Дассо "Мираж" 2000 [1-3], истребитель Локхид - Мартин F-2 «Рэптор» [4], которые обеспечивают на ограниченном театре военных действий обнаружение, распознавание, сопровождение и поражение воздушных, наземных и надводных целей при одновременном проведении оборонительных мероприятий с применением средств активного и пассивного противодействия.
Известен способ управления вооружением самолета F-22 "Рэптор", заключающий в вводе исходных данных в прицельную систему об особенностях предстоящего полета с переносного носителя исходных данных, контроле и регистрации режимов работы системы управления вооружением, определении параметров движения цели на основе применения комплекса оптико-локационных средств и радиолокационной прицельной системы, управлении средствами поражения и пассивного противодействия в соответствии с ситуационной обстановкой, индикации о наличии средств поражения и пассивного противодействия, опознавании целей, формирования навигационно-пилотажных параметров, формировании параметров целеуказания и применения, формировании отображаемой информации на основе бортовой вычислительной системы [4].
Известна система управления вооружением самолета F-22 "Рэптор", которая содержит систему контроля и регистрации, комплекс навигационно-пилотажных средств, комплекс оптико-локационных средств, радиолокационную прицельную систему, комплекс средств радиоэлектронного противодействия, систему управления средствами поражения и пассивного противодействия, комплект средств поражения и пассивного противодействия, систему средств связи и опознавания, первый многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, переносной носитель исходных данных, второй многофункциональный индикатор, бортовую вычислительную систему, включающую взаимосоединенные по магистрали вычислительного обмена вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, ввода-вывода-управления информационным обменом, формирования параметров целеуказания и применения, формирования отображаемой информации [4].
Недостатками данной системы управления вооружением являются: невозможность целеуказания и применения средств поражения по малоразмерным, слабозаметным в радиолокационном спектре наземным целям и ориентирам, а также вертолетам, находящим в режиме висения; отсутствие возможности экстренного документального анализа результатов полета; отсутствие координированного выполнения самолетом (особенно в одноместном боевом исполнении) истребительных, штурмовых, бомбардировочных и оперативных разведывательных функций в быстротекущих и опасных боевых ситуациях.
Известен способ управления вооружением многофункциональных самолетов (МФС) тактического назначения, заключающийся в снаряжении летательных аппаратов перед полетами авиационными средствами поражения и средствами пассивного противодействия, осуществлении записи в оперативную память с носителя полетных заданий данных о параметрах полета (исходных данных для всех бортовых систем, параметров аэродромов, целей, характеристик режимов работы в полете, текстовых данных для индикаторов, применяемых авиационных средствах поражения), обеспечении энергопитания от бортовых источников при подготовке и применении авиационных средств поражения и средств пассивного противодействия, выдаче сигналов для идентификации имеющихся на борту средств поражения, их состояния и мест установки, идентификации и сопровождении воздушных и наземных целей в процессе полета на основе применения радиолокационных и оптических каналов, распознавании вертолетов, находящихся в режиме висения на основе анализа доплеровских частот, определении слабозаметных в радиолокационном спектре излучения малоразмерных наземных целей на основе изменения диаграммы излучения, определении факта обнаружения самолета на основе фиксации облучения радиолокационными станциями противника, осуществлении целеуказания на эти станции средств активных помех и систем наведения ракет с радиолокационными головками самонаведения, обеспечении беспоисковой связи между взаимодействующими в операции летательными аппаратами, приеме команд наведения, тактической обстановки от наземных пунктов управления и наведения, осуществлении отображения цветной и монохромной знакографической, телевизионной, картографической и смешанной информации, осуществлении комплексной обработки информации, фиксации координат и характеристик вновь обнаруженных целей, мнемокадров оперативной телевизионной информации по результатам разведки или боевого применения на носитель полетных заданий для записи и последующего воспроизведения после полета, оказании интеллектуальной поддержки экипажу в зависимости от ситуационной обстановки на основе функционирования вычислительно-логических модулей, при этом в ситуации обнаружения радиолокационной станцией дальней воздушной цели и фиксации факта облучения самолета радиолокационным излучением назначают средства поражения обнаруженной цели: ракеты "воздух-воздух" средней и большой дальности с тепловой и активной радиолокационной головкой самонаведения, средства пассивного противодействия, активных помех, формируют циклограмму подготовки и пуска средств противодействия на основе оптимизации функционала эффективности решения боевой задачи, в ситуации обнаружения наземной цели и одновременно атакующего истребителя противника назначают средства сопровождения, поражения, режимы индикации, способ и порядок выполнения маневра против возможной атаки противника и собственной атаки, формируют циклограммы подготовки и пуска выбранных средств и порядок выполнения маневра на основе оптимизации функционала условий выживаемости и решения боевой задачи, выдают рекомендации летчику о действиях в условиях сложившейся ситуации на основе поступления команд на средства индикации из вычислительно-логических элементов дальнего воздушного боя или дальнего боя по поверхности, при ведении ближнего воздушного боя в ситуации использования летательного аппарата одновременно как истребителя и как постановщика помех обеспечивают выбор наиболее опасной цели, назначают средства поражения, активного и пассивного противодействия, способ и порядок выполнения маневрирования, работы со средствами сопровождения целей, формируют циклограмму подготовки и применения выбранных авиационных средств поражения на основе оптимизации функционала максимума возможного поражения противника и минимума собственных потерь, в ситуации фиксации факта облучения самолета от радиолокационных средств мобильного зенитно-ракетного комплекса противника назначают средства поражения и пассивного противодействия, активного противодействия, порядок выполнения работ экипажу, способ и порядок выполнения противозенитного маневрирования и маневра последующей возможной атаки, формируют график подготовки и пуска средств поражения и пассивного противодействия, выполнения боевого маневрирования на основе оптимизации функционала минимума собственных потерь, максимума возможного поражения противника, при этом выдают рекомендации о действиях экипажа в сложившейся ситуации на основе индикации команд поступающих из вычислителя логического модуля ближнего воздушного боя или ближнего воздушного боя по поверхности [5].
Известна система управления вооружением многофункциональных самолетов, которая содержит систему контроля, комплекс навигационно-пилотажных средств, бортовой канал информационного обмена, комплекс оптико-локационных прицельных средств, радиолокационную прицельную систему, комплекс средств радиоэлектронного противодействия, систему управления средствами поражения и пассивного противодействия, систему средств связи и опознавания, первый многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, переносной носитель исходных данных, другой многофункциональный индикатор, бортовую вычислительную систему, включающую взаимосоединенные входами-выходами по магистрали вычислительного обмена вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, формирования параметров целеуказания и применения, формирования отображаемой информации, ввода-вывода-управления обменом, другой вход-выход которого является входом-выходом бортовой вычислительной системы, подключенным к бортовому каналу информационного обмена, дополнительно снабжен введенными в состав бортовой вычислительной системы, подключенными к магистрали вычислительного обмена вычислительно-логическими модулями распознавания в радиолокационном спектре вертолетов, находящихся в режиме висения, идентификации слабозаметных в радиолокационном спектре малоразмерных наземных целей, формирования параметров экстренного анализа полета, дальнего воздушного боя, дальнего боя по поверхности, ближнего воздушного боя, ближнего боя по поверхности, при этом взаимосоединенные по бортовому каналу информационного обмена первый многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, второй многофункциональный индикатор, бортовая вычислительная система образуют индикационно-информационную интерактивную систему управления ситуациями полета; радиолокационная прицельная система во взаимодействии через бортовой канал информационного обмена с комплексом навигационно-пилотажных средств, комплексом средств радиоэлектронного противодействия, системой управления средствами поражения и пассивного противодействия, системой управления самолетом и двигательной установкой, комплектом средств поражения и пассивного противодействия, системой контроля и регистрации, индикационно-информационной интерактивной системой управления ситуациями полета образуют радиолокационный канал обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения, средств активного и пассивного противодействия, а комплекс оптико-локационных прицельных средств во взаимодействии с комплексом средств радиоэлектронного противодействия, системой контроля и регистрации, системой управления средствами поражения и пассивного противодействия, комплектом средств поражения и пассивного противодействия, индикационно-информационной интерактивной системой управления ситуациями полета образуют оптико-локационный канал обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения и средств активного и пассивного противодействия; радиолокационный и оптико-локационный каналы обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения и средств активного и пассивного противодействия во взаимодействии между собой, комплексную интерактивную систему управления применением самолета, осуществляющего координированные в пространстве и времени функции истребителя, перехватчика, бомбардировщика, штурмовика, постановщика помех и оперативного разведчика в одноместном боевом и двухместном учебно-боевом применении [5].
Недостатком способа и системы управления вооружением является невысокая точность целеуказаний управляемым авиационным ракетам, так как не учитывается прогноз изменения угловых положений целей, связанный с их маневрированием.
Известен способ управления вооружением многофункциональных самолетов тактического назначения, заключающем в снаряжении летательных аппаратов перед полетами авиационными средствами поражения и средствами пассивного противодействия, осуществлении записи в оперативную память с носителя полетных заданий данных о параметрах полета (исходных данных для всех бортовых систем, параметров аэродромов, целей, характеристик режимов работы в полете, текстовых данных для индикаторов, применяемых авиационных средствах поражения), обеспечении энергопитания от бортовых источников при подготовке и применении авиационных средств поражения и средств пассивного противодействия, выдаче сигналов для идентификации имеющихся на борту средств поражения, их состояния и мест установки, идентификации и сопровождении воздушных и наземных целей в процессе полета на основе применения радиолокационных и оптических каналов, распознавании вертолетов, находящихся в режиме висения на основе анализа доплеровских частот, определении слабозаметных в радиолокационном спектре излучения малоразмерных наземных целей на основе изменения диаграммы излучения, определении факта обнаружения самолета на основе фиксации облучения радиолокационными станциями противника, осуществлении целеуказания на эти станции средств активных помех и систем наведения ракет с радиолокационными головками самонаведения, обеспечении беспоисковой связи между взаимодействующими в операции летательными аппаратами, приеме команд наведения, тактической обстановки и взаимодействия от наземных пунктов управления и наведения, осуществлении отображения цветной и монохромной знакографической, телевизионной, картографической и смешанной информации, осуществлении комплексной обработки информации, фиксации координат и характеристик вновь обнаруженных целей, мнемокадров оперативной телевизионной информации по результатам разведки или боевого применения на носитель полетных заданий для записи и последующего воспроизведения после полета, оказании интеллектуальной поддержки экипажу в зависимости от ситуационной обстановки на основе функционирования вычислительно-логических модулей, при этом в ситуации обнаружения радиолокационной станцией дальней воздушной цели и фиксации факта облучения самолета радиолокационным излучением назначают средства поражения обнаруженной цели: ракеты "воздух-воздух" средней и большой дальности с тепловой и активной радиолокационной головкой самонаведения, средства пассивного противодействия, активных помех, формируют циклограмму подготовки и пуска средств противодействия на основе оптимизации функционала эффективности решения боевой задачи, в ситуации обнаружения наземной цели и одновременно атакующего истребителя противника назначают средства сопровождения, поражения, режимы индикации для индикаторов, способ и порядок выполнения маневра против возможной атаки противника и собственной атаки, формируют циклограммы подготовки и пуска выбранных средств и порядок выполнения маневра на основе оптимизации функционала условий выживаемости и решения боевой задачи, выдают рекомендации летчику о действиях в условиях сложившейся ситуации на основе поступления команд на средства индикации из вычислительно-логических элементов дальнего воздушного боя или дальнего боя по поверхности, при ведении ближнего воздушного боя в ситуации использования летательного аппарата одновременно как истребителя и как постановщика помех обеспечивают выбор наиболее опасной цели, назначают средства поражения, активного и пассивного противодействия, способ и порядок выполнения маневрирования, работы со средствами сопровождения целей, формируют циклограмму подготовки и применения выбранных авиационных средств поражения на основе оптимизации функционала максимума возможного поражения противника и минимума собственных потерь, в ситуации фиксации факта облучения самолета от радиолокационных средств мобильного зенитно-ракетного комплекса противника назначают средства поражения и пассивного противодействия, активного противодействия, порядок выполнения работ экипажу, способ и порядок выполнения противозенитного маневрирования и маневра последующей возможной атаки, формируют график подготовки и пуска средств поражения и пассивного противодействия, выполнения боевого маневрирования на основе оптимизации функционала минимума собственных потерь, максимума возможного поражения противника, при этом выдают рекомендации о действиях экипажа в сложившейся ситуации на основе индикации команд поступающих из вычислителя логического модуля ближнего воздушного боя или ближнего воздушного боя по поверхности, осуществлении анализа динамики изменения углового положения цели на основе сравнения текущих значений с заданными значениями, определении угловой скорости движения цели и осуществлении целеуказание ракете с учетом угловых скоростей перемещения цели [6].
Данный способ реализуется в системе управления вооружением многофункциональных самолетов тактического назначения, содержащей систему контроля и регистрации, комплекс навигационно-пилотажных средств, бортовой канал информационного обмена, комплекс оптико-локационных прицельных средств, блок анализа параметров движения цели, вход-выход которого соединен с бортовым каналом информационного обмена, радиолокационную прицельную систему, комплекс средств радиоэлектронного противодействия, систему управления средствами поражения и пассивного противодействия, систему средств связи и опознавания, многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, переносной носитель исходных данных, другой многофункциональный индикатор, бортовую вычислительную систему, включающую взаимосоединенные входами-выходами по магистрали вычислительного обмена вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, формирования параметров целеуказания и применения, формирования отображаемой информации, ввода-вывода-управления обменом, другой вход-выход которого является входом-выходом бортовой вычислительной системы, подключенным к бортовому каналу информационного обмена, снабжена введенными в состав бортовой вычислительной системы, подключенными к магистрали вычислительного обмена вычислительно-логическими модулями распознавания в радиолокационном спектре вертолетов, находящихся в режиме висения; идентификации слабозаметных в радиолокационном спектре малоразмерных наземных целей, формирования параметров экстренного анализа полета, дальнего воздушного боя, дальнего боя по поверхности, ближнего воздушного боя, ближнего боя по поверхности, при этом взаимосоединенные по бортовому каналу информационного обмена многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, другой многофункциональный индикатор, бортовая вычислительная система образуют индикационно-информационную интерактивную систему управления ситуациями полета; радиолокационная прицельная система во взаимодействии через бортовой канал информационного обмена с комплексом навигационно-пилотажных средств, комплексом средств радиоэлектронного противодействия, системой управления средствами поражения и пассивного противодействия, системой управления самолетом и двигательной установкой, комплектом средств поражения и пассивного противодействия, системой контроля и регистрации, индикационно-информационной интерактивной системой управления ситуациями полета образуют радиолокационный канал обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения, средств активного и пассивного противодействия, а комплекс оптико-локационных прицельных средств во взаимодействии с комплексом средств радиоэлектронного противодействия, системой управления самолетом и двигательной установкой, системой контроля и регистрации, системой управления средствами поражения и пассивного противодействия, комплектом средств поражения и пассивного противодействия, индикационно-информационной интерактивной системой управления ситуациями полета образуют оптико-локационный канал обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения и средств активного и пассивного противодействия; радиолокационный и оптико-локационный каналы обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения и средств активного и пассивного противодействия во взаимодействии между собой, комплексную интерактивную систему управления применением самолета, осуществляющего координированные в пространстве и времени функции истребителя, перехватчика, бомбардировщика, штурмовика, постановщика помех и оперативного разведчика в одноместном боевом и двухместном учебно-боевом применении, блок анализа параметров движения цели состоит из n пороговых устройств, элемента ИЛИ, сдвигового регистра, генератора импульсов, первого, второго и третьего элементов И, первого второго и третьего счетчиков, первого, второго и третьего делителя, интегратора, сумматора, задатчика сигналов, дифференцирующей цепи, при этом вход блока анализа параметров движения цели соединен с входом сумматора, вторыми входами первого, второго, третьего делителей и первыми входами пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, а выходы которых через первый элемент ИЛИ соединены с первым входом сдвигового регистра, второй вход которого и вторые входы первого, второго и третьего счетчиков соединены с выходом дифференцирующей цепи, вход которой соединен с выходом источника питания, первый, второй и третий выходы сдвигового регистра соединены с первыми входами первого, второго и третьего элементов И, а вторые входы соединены с выходом генератора импульсов, выходы первого, второго и третьего элементов И соединены с первыми входами первого, второго и третьего счетчиков, выходы которых соединены с первыми входами делителей, выходы которых через второй элемент. ИЛИ и интегратор соединен с первым входом сумматора, выход которого является выходом блока анализа параметров движения цели [6].
Недостатком способа и системы управления вооружением является отсутствия возможности применения управляемых авиационных ракет в условиях скрытного наблюдения за целью, необходимость которого возрастает при применении помех. При этом комплекс оптико-локационных средств в пассивном режиме осуществляет сопровождение цели только по угловым координатам, что не позволяет обеспечить полное приборное обеспечения задачи прицеливания.
Техническим результатом изобретения является расширение функциональных возможностей системы управления вооружением за счет применения авиационных управляемых ракет в условиях скрытного наблюдения за целью на основе косвенного определения дальности и скорости воздушной цели при наклонной траектории ее движения.
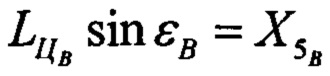
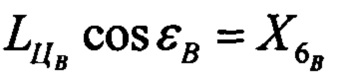
Указанный технический результат достигается тем, что в способе управления вооружением многофункциональных самолетов тактического назначения, заключающем в снаряжении летательных аппаратов перед полетами авиационными средствами поражения и средствами пассивного противодействия, осуществлении записи в оперативную память с носителя полетных заданий данных о параметрах полета (исходных данных для всех бортовых систем, параметров аэродромов, целей, характеристик режимов работы в полете, текстовых данных для индикаторов, применяемых авиационных средствах поражения), обеспечении энергопитания от бортовых источников при подготовке и применении авиационных средств поражения и средств пассивного противодействия, выдаче сигналов для идентификации имеющихся на борту средств поражения, их состояния и мест установки, идентификации и сопровождении воздушных и наземных целей в процессе полета на основе применения радиолокационных и оптических каналов, распознавании вертолетов, находящихся в режиме висения на основе анализа доплеровских частот, определении слабозаметных в радиолокационном спектре излучения малоразмерных наземных целей на основе изменения диаграммы излучения, определении факта обнаружения самолета на основе фиксации облучения радиолокационными станциями противника, осуществлении целеуказания на эти станции средств активных помех и систем наведения ракет с радиолокационными головками самонаведения, обеспечении беспоисковой связи между взаимодействующими в операции летательными аппаратами, приеме команд наведения, тактической обстановки и взаимодействия от наземных пунктов управления и наведения, осуществлении отображения цветной и монохромной знакографической, телевизионной, картографической и смешанной информации, осуществлении комплексной обработки информации, фиксации координат и характеристик вновь обнаруженных целей, мнемокадров оперативной телевизионной информации по результатам разведки или боевого применения на носитель полетных заданий для записи и последующего воспроизведения после полета, оказании интеллектуальной поддержки экипажу в зависимости от ситуационной обстановки на основе функционирования вычислительно-логических модулей, при этом в ситуации обнаружения радиолокационной станцией дальней воздушной цели и фиксации факта облучения самолета радиолокационным излучением назначают средства поражения обнаруженной цели: ракеты "воздух-воздух" средней и большой дальности с тепловой и активной радиолокационной головкой самонаведения, средства пассивного противодействия, активных помех, формируют циклограмму подготовки и пуска средств противодействия на основе оптимизации функционала эффективности решения боевой задачи, в ситуации обнаружения наземной цели и одновременно атакующего истребителя противника назначают средства сопровождения, поражения, режимы индикации для индикаторов, способ и порядок выполнения маневра против возможной атаки противника и собственной атаки, формируют циклограммы подготовки и пуска выбранных средств и порядок выполнения маневра на основе оптимизации функционала условий выживаемости и решения боевой задачи, выдают рекомендации летчику о действиях в условиях сложившейся ситуации на основе поступления команд на средства индикации из вычислительно-логических элементов дальнего воздушного боя или дальнего боя по поверхности, при ведении ближнего воздушного боя в ситуации использования летательного аппарата одновременно как истребителя и как постановщика помех обеспечивают выбор наиболее опасной цели, назначают средства поражения, активного и пассивного противодействия, способ и порядок выполнения маневрирования, работы со средствами сопровождения целей, формируют циклограмму подготовки и применения выбранных авиационных средств поражения на основе оптимизации функционала максимума возможного поражения противника и минимума собственных потерь, в ситуации фиксации факта облучения самолета от радиолокационных средств мобильного зенитно-ракетного комплекса противника назначают средства поражения и пассивного противодействия, активного противодействия, порядок выполнения работ экипажу, способ и порядок выполнения противозенитного маневрирования и маневра последующей возможной атаки, формируют график подготовки и пуска средств поражения и пассивного противодействия, выполнения боевого маневрирования на основе оптимизации функционала минимума собственных потерь, максимума возможного поражения противника, при этом выдают рекомендации о действиях экипажа в сложившейся ситуации на основе индикации команд поступающих из вычислителя логического модуля ближнего воздушного боя или ближнего воздушного боя по поверхности, осуществлении анализа динамики изменения углового положения цели на основе сравнения текущих значений с заданными значениями, определении угловой скорости движения цели и осуществлении целеуказание ракете с учетом угловых скоростей перемещения цели, дополнительно определяют возможность пуска ракет в условиях скрытного наблюдения за воздушной целью на основе косвенного определения дальности до воздушной цели и сравнения текущих значений дальности и угловых положений многофункционального самолета с заданными значениями, определяющими границы зон возможных пусков ракет, определяют траекторию движения воздушной цели в трехмерном пространстве, и в случае идентификации параметров движения воздушной цели по наклонной траектории осуществляют не менее четырех засечек угловых положений воздушной цели и трех базовых расстояний, пролетаемых многофункциональным самолетом относительно опорных точек его траектории движения, определяют участки сближения относительно опорных точек, определяют взаимные положения летательных аппаратов на участках сближения: векторы дальностей до воздушной цели, расстояния, базовые расстояния, пролетаемые соответственно воздушной целью и многофункциональным самолетом в вертикальной и горизонтальных плоскостях, определяют координаты воздушной цели в трехмерном пространстве для опорных точек траектории многофункционального самолета, определяют дальность до воздушной цели в виде выражения:

где  ,
,  - координаты цели относительно четвертой опорной точки траектории многофункционального самолета, определяют момент выдачи ракете команды «Пуск разрешен», при достижении текущей дальности и углового положения заданных значений, которые определяют границы зоны возможных пусков ракет.
- координаты цели относительно четвертой опорной точки траектории многофункционального самолета, определяют момент выдачи ракете команды «Пуск разрешен», при достижении текущей дальности и углового положения заданных значений, которые определяют границы зоны возможных пусков ракет.
Данный способ реализуется в системе управления вооружением многофункциональных самолетов тактического назначения, содержащей систему контроля и регистрации, комплекс навигационно-пилотажных средств, бортовой канал информационного обмена, комплекс оптико-локационных прицельных средств, блок анализа параметров движения целей, вход-выход которого соединен бортовым каналом информационного обмена, радиолокационную прицельную систему, комплекс средств радиоэлектронного противодействия, систему управления средствами поражения и пассивного противодействия, систему средств связи и опознавания, многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, переносной носитель исходных данных, другой многофункциональный индикатор, бортовую вычислительную систему, включающую взаимосоединенные входами-выходами по магистрали вычислительного обмена вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, формирования параметров целеуказания и применения, формирования отображаемой информации, ввода-вывода-управления обменом, другой вход-выход которого является входом-выходом бортовой вычислительной системы, подключенным к бортовому каналу информационного обмена, снабжена введенными в состав бортовой вычислительной системы, подключенными к магистрали вычислительного обмена вычислительно-логическими модулями распознавания в радиолокационном спектре вертолетов, находящихся в режиме висения; идентификации слабозаметных в радиолокационном спектре малоразмерных наземных целей, формирования параметров экстренного анализа полета, дальнего воздушного боя, дальнего боя по поверхности, ближнего воздушного боя, ближнего боя по поверхности, при этом взаимосоединенные по бортовому каналу информационного обмена многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, другой многофункциональный индикатор, бортовая вычислительная система образуют индикационно-информационную интерактивную систему управления ситуациями полета; радиолокационная прицельная система во взаимодействии через бортовой канал информационного обмена с комплексом навигационно-пилотажных средств, комплексом средств радиоэлектронного противодействия, системой управления средствами поражения и пассивного противодействия, системой управления самолетом и двигательной установкой, комплектом средств поражения и пассивного противодействия, системой контроля и регистрации, индикационно-информационной интерактивной системой управления ситуациями полета образуют радиолокационный канал обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения, средств активного и пассивного противодействия, а комплекс оптико-локационных прицельных средств во взаимодействии с комплексом средств радиоэлектронного противодействия, системой управления самолетом и двигательной установкой, системой контроля и регистрации, системой управления средствами поражения и пассивного противодействия, комплектом средств поражения и пассивного противодействия, индикационно-информационной интерактивной системой управления ситуациями полета образуют оптико-локационный канал обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения и средств активного и пассивного противодействия; радиолокационный и оптико-локационный каналы обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения и средств активного и пассивного противодействия во взаимодействии между собой, комплексную интерактивную систему управления применением самолета, осуществляющего координированные в пространстве и времени функции истребителя, перехватчика, бомбардировщика, штурмовика, постановщика помех и оперативного разведчика в одноместном боевом и двухместном учебно-боевом применении, блок анализа параметров движения цели состоит из n пороговых устройств, элемента ИЛИ, сдвигового регистра, генератора импульсов, первого, второго и третьего элементов И, первого второго и третьего счетчиков, первого, второго и третьего делителя, интегратора, сумматора, задатчика сигналов, дифференцирующей цепи, при этом вход блока анализа параметров движения цели соединен с входом сумматора, вторыми входами первого, второго, третьего делителей и первыми входами пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, а выходы которых через первый элемент ИЛИ соединены с первым входом сдвигового регистра, второй вход которого и вторые входы первого, второго и третьего счетчиков соединены с выходом дифференцирующей цепи, вход которой соединен с выходом источника питания, первый, второй и третий выходы сдвигового регистра соединены с первыми входами первого, второго и третьего элементов И, а вторые входы соединены с выходом генератора импульсов, выходы первого, второго и третьего элементов И соединены с первыми входами первого, второго и третьего счетчиков, выходы которых соединены с первыми входами делителей, выходы которых через второй элемент. ИЛИ и интегратор соединен с первым входом сумматора, выход которого является выходом блока анализа параметров движения цели, в которую дополнительно введен блок определения зоны возможных пусков ракет в условиях скрытного наблюдения за воздушной целью, вход которого соединен с выходом блока анализа параметров движения целей, а выход с бортовым каналом информационного обмена.
Кроме того алгоритм работы блока определения зоны возможных пусков ракеты в условиях скрытного наблюдения за целью, заключается в том, что определяют траекторию движения воздушной цели в трехмерном пространстве, и в случае идентификации параметров движения воздушной цели по наклонной траектории,
εв ≠ 0, εг ≠ 0,
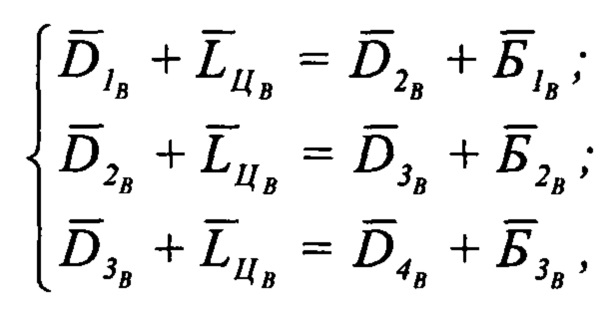
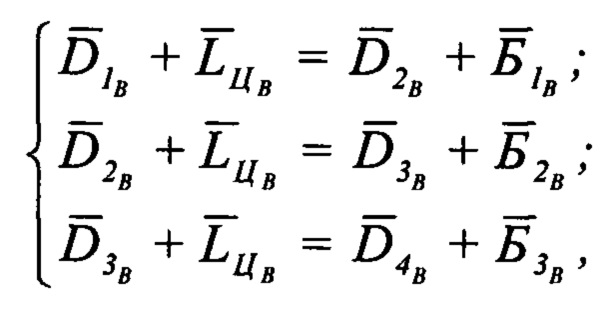
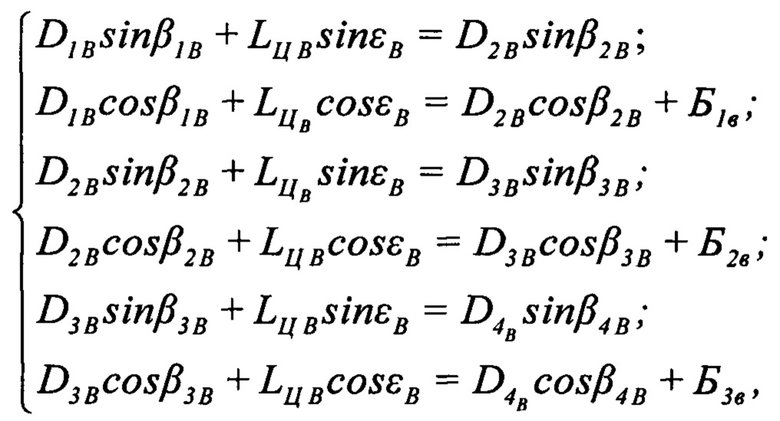
осуществляют не менее четырех засечек угловых положений воздушной цели и трех базовых расстояний, пролетаемых многофункциональным самолетом относительно опорных точек его траектории движения, определяют участки сближения относительно опорных точек, определяют взаимные положения летательных аппаратов на участках сближения в вертикальной плоскости: векторы дальностей до воздушной цели, расстояния, базовые расстояния, пролетаемые соответственно воздушной целью и многофункциональным самолетом, в виде системы уравнений:
где  ,
,  ,
,  ,
,  - вектора дальностей воздушной цели относительно опорных точек многофункционального самолета,
- вектора дальностей воздушной цели относительно опорных точек многофункционального самолета,  - вектора, соответствующие расстоянию пролетаемому воздушной целью относительно опорных точек,
- вектора, соответствующие расстоянию пролетаемому воздушной целью относительно опорных точек,  ,
,  ,
,  - вектора, соответствующие базовым расстояниям пролетаемые многофункциональным самолетом относительно опорных точек, преобразуют системы векторных уравнений в скалярную форму в виде:
- вектора, соответствующие базовым расстояниям пролетаемые многофункциональным самолетом относительно опорных точек, преобразуют системы векторных уравнений в скалярную форму в виде:

где  - базовые расстояний пролетаемые многофункциональным самолетом относительно опорных точек, преобразуют системы скалярных уравнений в каноническую форму:
- базовые расстояний пролетаемые многофункциональным самолетом относительно опорных точек, преобразуют системы скалярных уравнений в каноническую форму:
где  ;
;  ;
;  ;
;  ;
;  ;
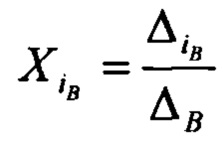
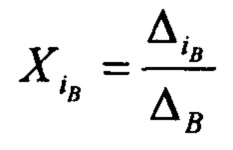
;  - параметры скалярной системы уравнений, обозначенные в виде неизвестных, вычисляют промежуточные значения в виде определителей матрицы:
- параметры скалярной системы уравнений, обозначенные в виде неизвестных, вычисляют промежуточные значения в виде определителей матрицы:
ΔВ, 
где ΔΒ, - определитель матрицы, представляющую левую часть уравнения  определитель матрицы, полученной из матрицы системы заменой i-го столбца столбцом свободных членов, определяют параметры сближения летательных аппаратов в вертикальной плоскости и аналогично в горизонтальной плоскостях в виде:
определитель матрицы, полученной из матрицы системы заменой i-го столбца столбцом свободных членов, определяют параметры сближения летательных аппаратов в вертикальной плоскости и аналогично в горизонтальной плоскостях в виде:
 ,
, 
определяют координат воздушной цели относительно третьей и четвертой опорных точек ее траектории относительно вертикальной и горизонтальной плоскости:
определяют координаты воздушной цели относительно третьей и четвертой опорных точек ее траектории в трехмерной системе координат:

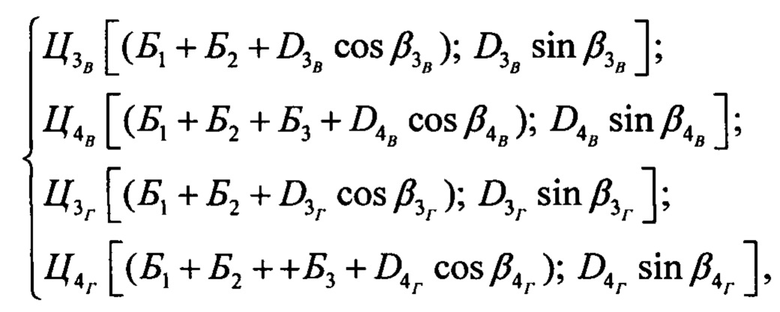
определяют координат многофункционального самолета в третьей и четвертой опорных точках его траектории:
П3[(Б1+Б2); 0; 0]; П4[(Б1+Б2+Б3); 0; 0],
определяют расстояния относительно третьей и четвертой опорных точек траектории воздушной цели в виде:


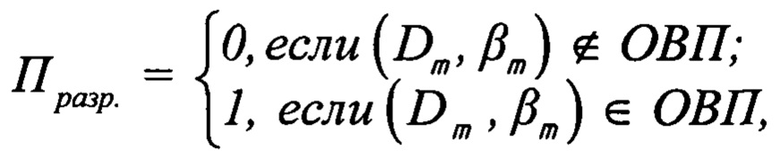
определяют момент выдачи ракете команды «Пуск разрешен», при достижении текущей дальности и углового положения заданных значений в виде:
где  ,
,  - текущие дальности и угловые положения МФС относительно воздушной цели, ОВП - область возможных пусков ракет.
- текущие дальности и угловые положения МФС относительно воздушной цели, ОВП - область возможных пусков ракет.
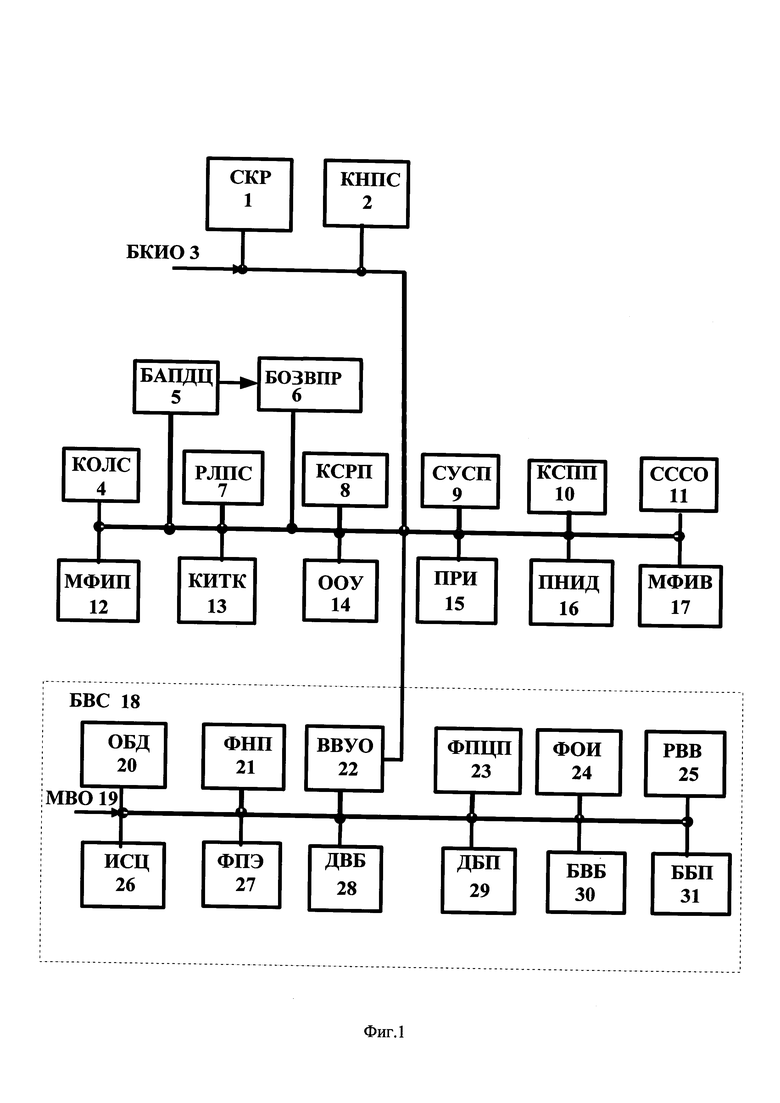
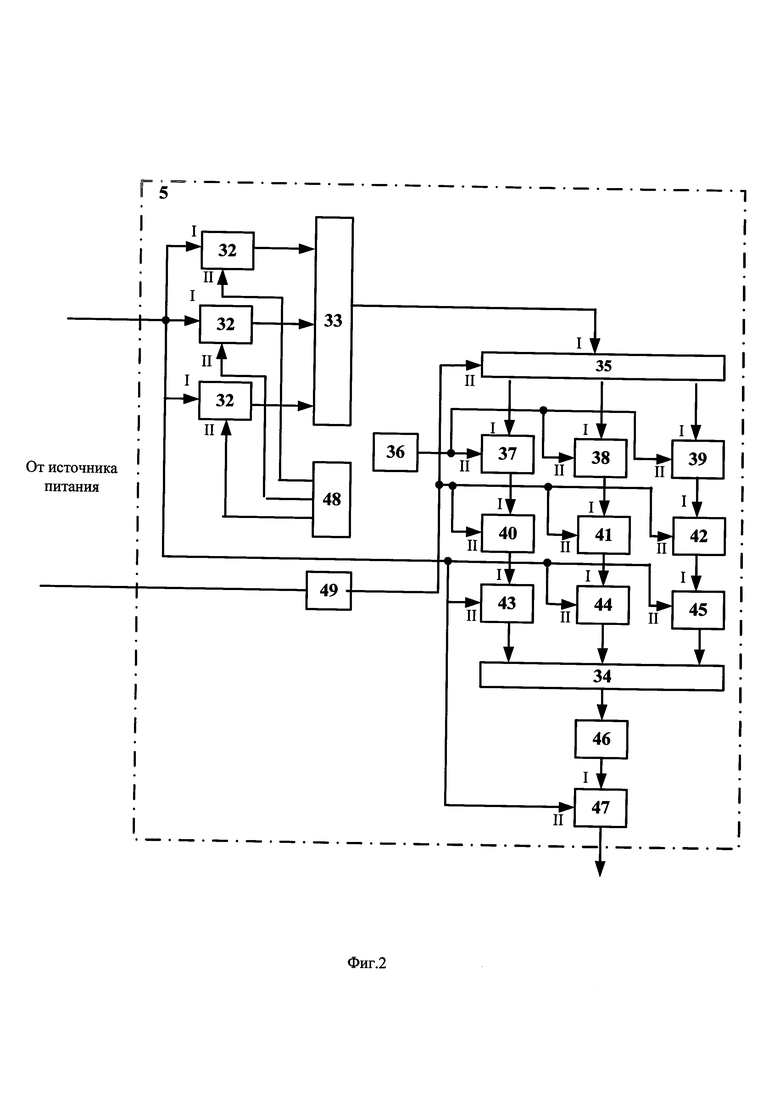
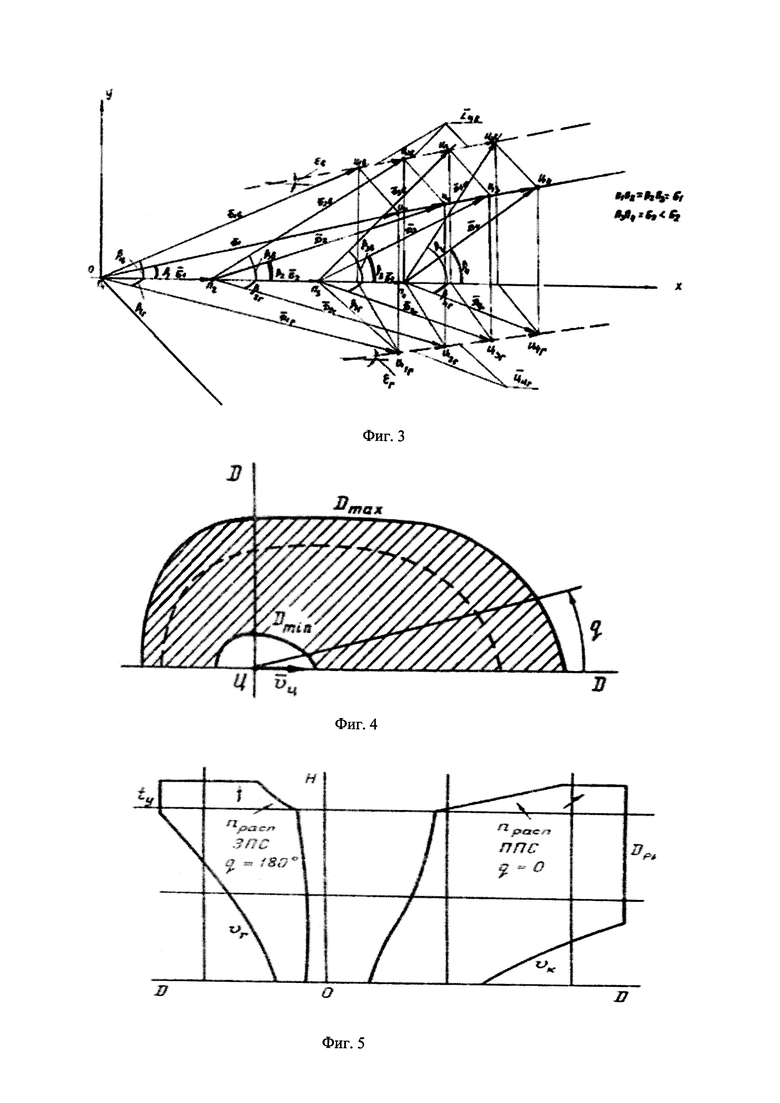
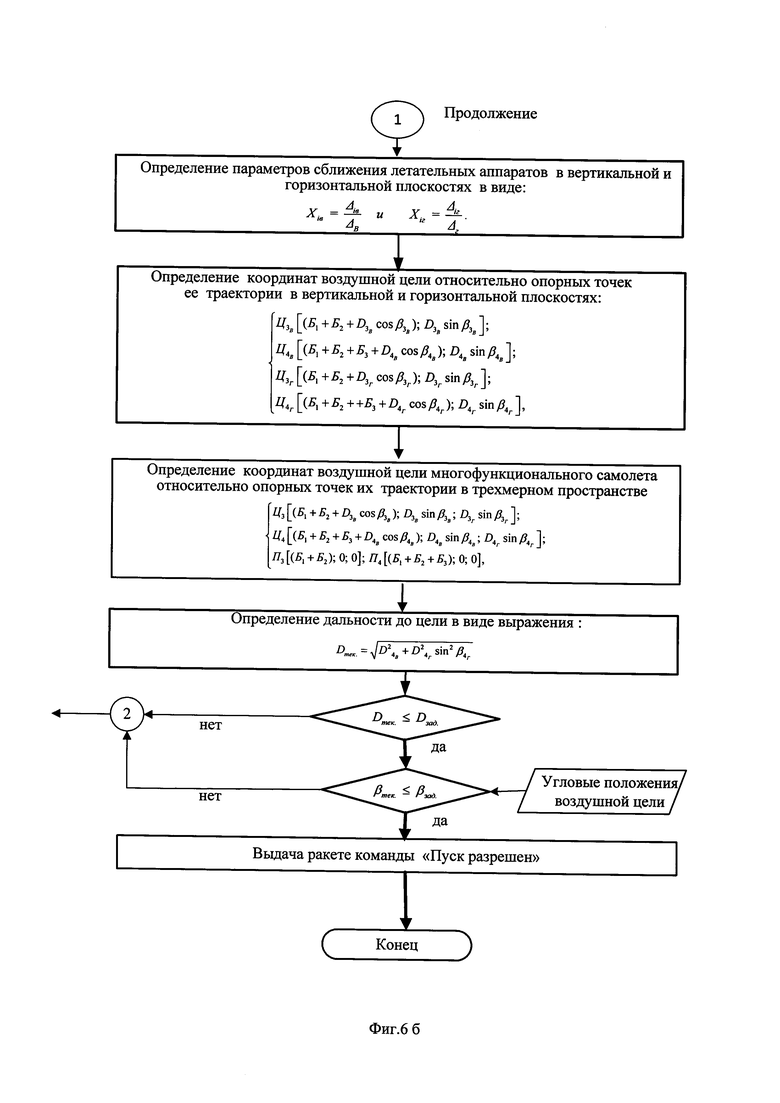
На фиг.1 представлена блок-схема системы управления вооружением многофункционального самолета тактического назначения, на фиг.2 - структурная схема блока 5 анализа параметров движения цели, на фиг.3 - схема сближения многофункционального самолета с воздушной целью, на фиг.4 - сечение зоны возможных пусков всеракурсных ракет в горизонтальной плоскости, на фиг.5 сечение зоны возможных пусков вееракурсных ракет в вертикальной плоскости, на фиг.6а, 6б - алгоритм работы блока определения зоны возможных пусков ракет.
В процессе ведения боевых действий, как правило, выделяются следующие этапы выполнения задачи поражение воздушной цели, которые определяются режимами работы СУВ при работе по воздушной цели:
- дальнее наведение;
- обзор (поиск и опознавание цели);
- целераспределение;
- ближнее наведение;
- выход из атаки.
Под дальним наведением понимается управление МФС по целеуказанию с пункта наведения или ведущего для вывода его в локационный контакт с целью с определенными условиями по взаимному расположению на момент обнаружения цели бортовыми средствами. При этом управление истребителем может осуществляться с пункта управления (ПУ) автоматически или вручную.
Основными задачами при дальнем наведении являются:
- определение координат цели относительно истребителя;
- выбор точки наведения с учетом движения цели.
При дальнем наведении на борт самолета с ПУ по командной линии управления передаются следующие основные команды:
- заданные скорость, высота, курс или путевой угол;
- дальность до цели, скорость сближения с целью, азимут и угол места цели;
- разовые команды (включения РЛС, на разворот и т.д.);
- управления зоной обзора ОПС.
Этап дальнего наведения заканчивается выводом самолета в окрестность цели и организацией режима "Обзор".
Этап "Обзор" начинается с момента оповещения летчика с ПУ о необходимости включения обзорно-прицельной системы (ОПС) в режим обзора воздушного пространства. Тип визирного устройства ОПС, используемого в режиме "Обзор", выбирается исходя из тактической и метеорологической обстановки (РЛПК или ОЛС).
Этап "Обзор" заканчивается назначением цели на атаку (целераспределением) и переходом ОПС в режим "непрерывной пеленгации" (слежением за одной целью).
Целераспределение включает выбор цели для атаки и может осуществляться на борту самолета или на пункте управления автоматически или вручную. При этом каждому самолету назначается своя цель.
Если летчик не согласен с автоматическим назначением цели на атаку, то может с помощью органов управления осуществить ручной выбор цели, который обладает более высоким приоритетом.
При фиксированных условиях атаки цели возможности применения УР однозначно характеризуются областью пуска и областью исходных положений для входа в область пуска.
Область пуска - пространство около цели, в пределах которого возможен прицельный пуск ракеты, обеспечивающий успешное наведение, надежное срабатывание взрывателя и поражение цели БЧ.
Размеры и форма области пуска для определенных условий атаки зависят от энергобаллистических характеристик УР, аппаратуры управления и маневренных возможностей атакующего самолета при прицеливании и пуске УР.
При этом область пуска имеет ближнюю и дальнюю границы, отстоящие от цели соответственно на Дmax(q) и Дmin(q). При ограничении области пуска по курсовому углу цели q появляются боковые границы Д(q), а при атаке в вертикальной плоскости - верхняя и нижняя границы.
На фиг.4, 5 показано сечение области пусков всеракурсной ракеты в горизонтальной и вертикальной плоскостях.
На дальнюю границу оказывает влияние:
- время управляемого полета ракеты;
- минимальная скорость сближения УР с целью, при которой обеспечивается надежное срабатывание неконтактного взрывателя;
- располагаемая перегрузка УР на траектории;
- максимальный угол отклонения координатора;
- дальность захвата цели координатором.
На ближнюю границу оказывает влияние:
- время взведения взрывателя tвзв;
- время выхода на траекторию наведения (устранения ошибок пуска);
- время переходных процессов от момента пуска до начала устойчивого наведения УР (для УР с командной системой наведения);
- максимальная скорость сближения УР с целью, при которой надежно срабатывает неконтактный взрыватель VДmах.
На боковые границы оказывает влияние:
- максимальный угол отклонения координатора ϕκ;
- максимальная угловая скорость координатора  ;
;
- способность координатора сопровождать цель под большими ракурсами;
- способ пуска (под расчетным углом упреждения или прямой наводкой).
Для приближенного расчета области стрельбы используются графоаналитическими методами с учетом только основных, наиболее существенных факторов.
Область исходных положений для атаки - область пространства около цели, из пределов которого атакующий самолет, начав доворот на цель или продолжая полет по кривой прицеливания, за минимально установленное время войдет в область пусков и останется в ее пределах на время пуска УР по установленным правилам. Сближение может выполняться по кривой погони с положительным или отрицательным углом упреждения, на параллельных или пересекающихся курсах, в передней и задней полусферах цели.
Система управления вооружением многофункционального самолета состоит из системы 1 контроля и регистрации (СКР), комплекса 2 навигационно-пилотажных средств (КНПС), бортового канала 3 информационного обмена (БКИО), комплекса 4 оптико-локационных прицельных средств КОЛС, блока 5 анализа параметров движения цели (БАПДЦ), блок 6 определения зон возможных пусков ракет (БОЗВПР), радиолокационной прицельной системы 7 (РЛПС), комплекса 8 средств радиоэлектронного противодействия (КСРП), системы 9 управления средствами поражения и пассивного противодействия (СУСП), комплекта 10 средств поражения и пассивного противодействия КСПП, системы 11 средств связи и опознавания СССО, многофункционального индикатора 12 (МФИП), коллиматорного индикатора 13 на лобовом стекле с телевизионной камерой обзора закабинного пространства (КИТК), органов 14 оперативного управления (ООУ), приборов 15 резервной индикации ПРИ, переносного носителя 16 исходных данных (ПНИД), второго многофункционального индикатора 17 (МФИВ), бортовой вычислительной системы 18 (БВС), магистрали 19 вычислительного обмена (МВО), вычислительно-логического модуля (ВЛМ) объединенной базы данных 20 (ОБД), ВЛМ формирования навигационно-пилотажных параметров 21 (ФНП), ВЛМ ввода-вывода-управления информационным обменом 22 (ВВУО), ВЛМ формирования параметров целеуказания и применения 23 (ФПЦП), ВЛМ формирования параметров отображаемой информации 24 (ФОИ), ВЛМ распознавания вертолетов, находящихся в режиме висения 25 (РВВ), ВЛМ идентификации, слабозаметных в радиолокационном спектре, малоразмерных наземных целей 26 (ИСЦ), ВЛМ формирования параметров экстренного анализа полета 27 (ФПЭ), ВЛМ дальнего воздушного боя 28 (ДВБ), ВЛМ дальнего боя по поверхности 29 (ДБП), ВЛМ ближнего воздушного боя 30 (БВБ), ВЛМ ближнего боя по поверхности 31 (ББП).
Блок 5 анализа параметров движения цели, содержит n - пороговых устройств 32, первый 33 и второй 34 элементы ИЛИ, сдвиговый регистр 35, генератор 36 импульсов, первый 37, второй 38 и третий 39 элементы И, первый 40, второй 41 и третий 42 счетчики, первый 43, второй 44 и третий 45 делители, интегратор 46, сумматор 47, задатчик 48 сигналов, дифференцирующую цепь 49.
СКР 1 ([2], стр. 215-217) по взаимосвязи через БКИО 3 с бортовым оборудованием осуществляет его обобщенный встроенный контроль и регистрацию на носители информации основных параметров движения самолета и состояния оборудования и выдачу визуальной и речевой информации экипажу о режимах работы в нештатных и аварийных ситуациях в полете для принятия решений.
КНПС 2 ([2], стр. 221-222) содержит физически разнородные (инерциальные, радиотехнические, спутниковые, воздушные) датчики и системы, формирующие параметры состояния самолета - координат местоположения, составляющих путевой и воздушной скоростей, углов курса, крена, тангажа, атаки и скольжения, которые с входа-выхода КНПС 5 через БКИО 6 поступают на входы-выходы взаимодействующего бортового оборудования.
БКИО 3 обеспечивает информационную взаимосвязь всего бортового оборудования, включающего ([2], стр. 248-249) механические, электромеханические, электрические и естественные связи между взаимодействующим оборудованием.
КОЛС 4 ([2], стр. 220-222) включает оптико-локационные, лазерные, телевизионные, тепловизионные, визирные (например, нашлемная система целеуказания, очки ночного видения) системы и датчики обзора окружающего пространства, фиксацию, идентификацию и сопровождение видимых воздушных, наземных, надводных подвижных и неподвижных целей; параметры движения самолета относительно целей, характеристики идентифицированных целей с входа-выхода КОЛС 4 через БКИО 3 поступают на входы-выходы взаимодействующего бортового оборудования.
БАПДЦ 5 [6], осуществляет анализ угловых параметров воздушных целей, определяет угловую скорость и обеспечивает целеуказания авиационным управляемым ракетам с учетом маневра цели.
БОЗВПР 6 в случае движения цели по наклонной траектории определяет косвенно параметры сближения летательных аппаратов по формульной зависимости, учитывающей особенности движения воздушной цели и обеспечивает определения момента выдачи ракете команды «пуск разрешен», в условиях скрытного наблюдения за целью.
РЛПС 7 ([2], стр. 218-220; [4], стр. 17) осуществляет активный обзор окружающего пространства и земной поверхности в радиолокационном спектре, обеспечивает обнаружение, опознавание, идентификацию, сопровождение и целеуказание на воздушные, надводные и наземные цели на основе обработки сигналов передачи и приема и информации о параметрах движения самолета в центре тяжести и в центре излучения антенны, полученных по БКИО 3 от КНПС 2. С входа-выхода РЛПС 6 скоростные (доплеровские изменения частот излучении) и координатные (например, угломерно-дальномерные) параметры целеуказания, характеристики обнаруженных, идентифицированных целей, параметры картографирования земной поверхности через БКИО 3 поступают во взаимодействующие системы.
КСРП 8 ([2], стр. 225-226; [4], стр. 17) включает средства фиксации фактов возможного обнаружения самолета (по фактам наличия облучения) радиолокационными станциями (наземными и воздушными) противника, целеуказания на эти станции и средства создания активных помех для вышеупомянутых станций и систем наведения ракет с радиолокационными головками самонаведения. Сигналы целеуказания и разовые сигналы фиксации фактов облучения с входа-выхода КСРП 7 через БКИО 3 передаются во взаимодействующее оборудование.
СУСП 9 ([2], стр. 222; [4], стр. 19) обеспечивает энергопитание от бортовых источников всех средств из состава КСПП 9 при подготовке и применении средств поражения и пассивного противодействия по циклограмме их подготовки, выдачу сигналов для идентификации имеющихся на борту средств из состава КСПП 9, их состоянии и местах установки, встроенный контроль в составе бортового оборудования, аварийный сброс подвесных средств и резервный пуск ракет, взаимодействие СУСП 8 с бортовым оборудованием осуществляется через БКИО 3.
КСПП 10 ([2], стр. 226-236; [4], стр. 18-19) включает средства поражения воздушных, надводных и наземных целей - бомбардировочное и артиллерийское (стрелково-пушечное вооружение), управляемое наводящееся и неуправляемое ракетное вооружение классов "воздух-воздух", "воздух-поверхность" и средства пассивного противодействия - ложные тепловые цели и дипольные отражатели радиолокационного излучения. Обмен сигналами с взаимодействующим оборудованием осуществляется через вход-выход КСПП 9 по БКИО 3.
СССО 11 ([2], стр. 224-225; [4], стр. 17) обеспечивает беспоисковую связь между взаимодействующими в операции летательными аппаратами, прием команд наведения, тактической обстановки и взаимодействия от наземных пунктов управления и наведения, двухстороннюю телефонную связь с наземным персоналом при подготовке к вылету и проведении отладочных работ, прослушивание речевого информатора, запрос и ответ сигналов определения государственной принадлежности и выдача сигнала "бедствие". Обмен сигналами с взаимодействующим оборудованием осуществляется через вход-выход СССО 10 по БКИО 3.
МФИП 12, МФИВ 17 ([2], стр. 213-214; [4], стр. 17) - многофункциональные индикаторы с цветным жидкокристаллическим экраном (ЖКЭ). Отображение на экранах осуществляется в едином времени с текущей ситуацией полета. На ЖКЭ осуществляется отображение цветной и монохромной знакографической, телевизионной, картографической и смешанной информации отображения режимов работы самолета и всего взаимодействующего оборудования. Многофункциональные кнопки-клавиши, обрамляющие ЖКЭ, автоматически назначаются по режимам индикации и служат для ручного выбора подрежимов различного заданного назначения. Во взаимодействии с бортовым оборудованием по БКИО 3 через вход-выход МФИП 12, МФИВ 17 в зависимости от режима индикации, задаваемого автоматически или нажатием летчиком режимных кнопок-клавиш, могут функционировать в одинаковых или разных режимах, например, "индикатор тактической обстановки", "индикатор комплексной информационной сигнализации, "индикатор камеры телевизионного обзора", "многофункциональный пульт управления", "виртуальный индикатор на лобовом стекле".
КИТК 13 ([2], стр. 214; [4], стр. 17) является коллиматорным индикатором отображения на полупрозрачный экран навигационно-пилотажной, прицельной и тактической информации, состояния вооружения и целей, подсказки по применению оружия на фоне видимого через лобовое стекло окружающего пространства, изображение которого фиксируется камерой телевизионного обзора (ТК). Взаимодействие КИТК 12 с бортовым оборудованием осуществляется через БКИО 3, при этом изображение с ТК может быть представлено на МФИП 11 или МФИВ 16.
ООУ 14 ([2], стр. 211) включают, например, педали и ручки управления средствами механизации самолета и двигательной установки с гашетками (кнопками) наведения прицельного перекрестия на цель и пуска средств из состава КСПП 9, кнопки и рычаги управления открытия (закрытия) фонаря, выпуска тормозного парашюта, щитки включения энергоносителя, управления оборотом, включения пожаротушения, управления закрылками, управления автопилотом и др. Взаимодействие ООУ 13 с бортовым оборудованием осуществляется через БКИО 3.
ПРИ 15 ([2], стр. 215-216) обеспечивают упрощенное пилотирование самолета при отказах МФИП 11, МФИВ 16, КИТК 12 и для сравнения информации - указатели приборной скорости и барометрической высоты, тахометры двигателей, командно-пилотажный и навигационно-плановый прибор. Взаимодействие ПРИ 14 с бортовым оборудованием осуществляется через БКИО 3.
ПНИД 16 ([7], стр. 23, 30) является носителем полетных заданий, устройство с долговременной репрограммируемой памятью (например, типа стандартной флеш-кард), подготовленным на наземном пункте планировании операцией и подготовки носителей полетных заданий и данных. Занесенная в ПНИД 16 информация содержит параметры заданного полета, исходные данные для всех бортовых систем в боевом и учебно-боевом исполнении самолета, параметры аэродромов, целей, характеристики режимов работы в полете, текстовые данные для индикаторов, применяемые средства поражения и противодействия и другие данные, необходимые для выполнения полета по плану и при возникновении нештатных ситуаций. После установки ПНИД 16 на борт его взаимодействие с бортовым оборудованием осуществляется через БКИО 3, при этом данные с ПНИД 16 передаются в ОБД 20.
БВС 18 ([4], стр. 17; [6], стр. 30, 474-478) является цифровой вычислительной машиной компактного моноблочного или многоблочного разнесенного исполнения, при этом вычислительно-логические модули (ФНП 21, ФПЦП 23, ФОИ 24, РВВ 25, ИСЦ 26, ФПЭ 27, ДВБ 28, ДБП 29, БВБ 30, ББП 31) исполнены на стандартных вычислительных схемах на основе одного или нескольких процессоров и запоминающих устройств различного типа.
МВО 19 [6], осуществляет информационную взаимосвязь по передаче данных между входами-выходами ВЛМ БВС 17 по магистрали вычислительного обмена.
ОБД 20 выполнена на стандартном долговременном запоминающем устройстве, хранящем оперативные данные, переданные с ПНИД 16, и долговременные данные стационарных параметров и ситуаций для боевого и учебно-боевого исполнения самолета; ВВУО 21 через один вход-выход осуществляет прием, преобразование и передачу данных во взаимодействующее оборудование через вход-выход БВС 17 по БКИО 3, а другой вход-выход ВВУО 21 подключен к МВО 18, осуществляющим информационно-вычислительный обмен между вычислительно-логическими модулями БВС 17.
В ФНП 20 осуществляется комплексная обработка информации от средств КНПС 2, КОЛС 4, РЛПС 6, КСРП 7 с исходными данными от ОБД 19 и формируются пилотажно-навигационные параметры (во всех режимах полета от взлета до посадки и остановки и при проведении всех видов подготовок и проверочных работ), которые с входа-выхода ФНП 20 через МВО 18 поступают во взаимодействующие вычислительно-логические модули, в том числе на ВВУО 21 для передачи через вход-выход БВС 17 и БКИО 3 во взаимодействующие системы.
В ФПЦП 22 осуществляется комплексная обработка информации от средств КОЛС 4, РЛПС 6, КСРП 7, КСПП 9, КНПС 2 и формируются прицельные параметры целеуказания и применения, которые с входа-выхода ФПЦП 22 через МВО 18 поступают во взаимодействующие вычислительно-логические модули, в том числе на ВВУО 21 для передачи через вход-выход БВС 17 и БКИО 3 во взаимодействующее оборудование.
В ФОИ 23 по данным, полученным по МВО 18 от ОБД 19, ФНП 20, ФПЦП 22 и от взаимодействующего оборудования через БКИО 3, ВВУО 20, формируются обобщенные мнемокадры функциональной, цифробуквенной, телевизионной информации, при необходимости совмещенной с аэронавигационной картой местности и представлением многофункционального пульта управления. Сформированные мнемокадры изображений, соответствующие режимам работы самолета и оборудования, в текущем времени с входа-выхода ФОИ 23 через МВО 18, ВВУО 21, БКИО 3 поступают в СКР 1 для записи, в СССО 10, например, для передачи на взаимодействующие объекты и наземные пункты управления, в МФИП 11, КИТК 12, МФИВ 16 (при одноместном объекте и двухместном учебно-боевом исполнении самолета) для отображения на экранах с целью принятия решений экипажем.
Система управления вооружением многофункционального самолета работает следующим образом.
Перед полетом осуществляют снаряжении многофункционального самолет тактического назначения авиационными средствами поражения, обеспечивают ввод в оперативную базу данных 19 с переносного носителя 15 исходные данные о параметрах полета (параметры аэродромов, целей, характеристик режимов работы системы управления вооружения в полете, текстовые данные для индикаторов, применяемых авиационных средствах поражения). Осуществляют энергопитания от бортовых источников при подготовке и применении авиационных средств поражения и средств пассивного противодействия, выдаче сигналов для идентификации имеющихся на борту средств поражения, их состояния и мест установки,
Для включения самолета в работу (например, после взлета) данные с ПНИД 15 через БКИО 3, ВВУО 21, МВО 18 передаются в ОВД 19, где хранятся в течение полета и используются для решения задач взаимодействующими вычислительно-логическими модулями, при этом ПНИД 15 освобождается для последующего приема и записи необходимой информации, в том числе в текущем полете (фиг.1).
В ФПЭ 26 по взаимодействию через МВО 18 с другими вычислительно-логическими модулями БВС 17 и взаимодействующим через ВВУО 21, БКИО 3 бортовым оборудованием формируются параметры экстренного анализа полета, например: координаты и характеристики вновь обнаруженных целей, результаты работы в полете самолета и оборудования, требующие проведения оперативного наземного анализа, мнемокадры оперативной телевизионной информации по результатам разведки или боевого применения, которые с входа-выхода ФПЭ 26 через МВО 18, ВВУО 21, БКИО 3 поступают на вход-выход ПНИД 15 для записи и последующего воспроизведения после полета. При этом воспроизведение записи возможно без снятия ПНИД 15 с борта самолета на средства МФИП 11, МФИВ 16, а также при снятии ПНИД 15 с борта самолета на наземных пунктах анализа результатов полета и планирования операций (фиг.1).
От РЛПС 6 через БКИО 3, ВВУО 21, МВО 18 в РВВ 24 и ИСЦ 25 поступают сигналы доплеровских сдвигов спектра частот излучения ωgi и характеристики отражения воздушного пространства, водной и земной поверхности xki. Из ОБД 19 через МВО 18, ВВУО 21 в РВВ 24 поступают заданные параметры ωлс, ωвс и в ИСЦ 25 поступают заданные параметрахк.
При работе по вертолетам, находящимся в режиме висения, спектр доплеровских частот имеет максимумы на частоте ωл вращения лопастей вертолетов и на частоте ωв вибраций корпуса вертолета. В РВВ 25 стандартным методом поиска максимума подобия ωв и ωвс, ωл и ωлс определяется вертолет как цель и параметры целеуказания, эти данные с входа-выхода РВВ 25 через МВО 18 поступают в ФПЦП 22 (для формирования целеуказания и выбора применяемых средств из состава КСПП 9), в ФОИ 23 (для отображения обнаруженной цели на мнемокадрах МФИП 11, МФИВ 16, КИТК 12) и через ВВУО 21, БКИО 3 во взаимодействующее оборудование, например в СКР 1 для регистрации и в СССО 10 для передачи на взаимодействующие объекты и на наземные пункты управления.
При работе РЛПС 6 по земной поверхности в соответствии с геометрией излучения и текущего углового положения самолета (углы курса, крена и тангажа) доплеровские сдвиги частот ωg iизлучения пропорциональны составляющим путевой скорости в направлении излучения. Из множества cog; в ИСЦ 25 поступает измеренное подмножество (подмножества) ωцi с наибольшим или характерным радиолокационным контрастом, при этом угол раствора излучения может быть сужен до размеров, обеспечивающих оптимальную локацию малоразмерной наземной цели (типа одиночного танка, передвижного зенитно-ракетного комплекса) для ее фиксации с разрешающей способностью 2-3 м.
В ИСЦ 25 по поступившим сигналам формируются стандартные функционалы максимального подобия xki и xk, по которым определяются слабозаметные в радиолокационном спектре излучения малоразмерные наземной цели, составляющие путевой скорости движения этих целей относительно земной поверхности и параметры целеуказания, которые с входа-выхода ИСЦ 25 через МВО 18 поступают в ФПЦП 22 для выбора средств поражения из состава КСПП 9, формирования целеуказания и применения в ФОИ 23 для представления цели на мнемокадрах МФИП 11, КИТК 12 и МФИВ 16.
Вычислительно-логические модули ДВБ 27, ДБП 28, БВБ 29, ББП 30 являются оперативно-советующими средствами, помогающими летчику (в одноместном боевом исполнении) и летчику и оператору (в двухместном боевом исполнении) выполнять конкретное управление вооружением летательного аппарата в соответствии с ситуациями.
При этом в ситуации обнаружения наземной цели и одновременно атакующего истребителя противника назначают средства сопровождения, поражения, режимы индикации, способ и порядок выполнения маневра против возможной атаки противника и собственной атаки, формируют циклограммы подготовки и пуска выбранных средств и порядок выполнения маневра на основе оптимизации функционала условий выживаемости и решения боевой задачи, выдают рекомендации летчику о действиях в условиях сложившейся ситуации на основе поступления команд на средства индикации из вычислительно-логических элементов дальнего воздушного боя или дальнего боя по поверхности.
Например, в одноместном боевом исполнении самолета при обнаружении РЛПС 6 дальней воздушной цели (бомбардировщик или вертолет противника), а средствами КСРП 7 зафиксирован факт облучения самолета радиолокационным излучением (от наземных или воздушных средств ПВО противника) в ДВБ 27: из состава КСПП 9 назначаются средства поражения обнаруженной цели - ракеты "воздух-воздух" средней и большой дальности с тепловой и активной радиолокационной головкой самонаведения, из состава КСПП 9 назначаются средства пассивного противодействия (ложные радиолокационные цели - дипольные отражатели радиолокационного излучения), из состава КСРП 6 назначаются средства создания активных помех, на основе оптимизации функционала эффективности решения боевой задачи формируется циклограмма подготовки и пуска средств противодействия, применения средств активного и пассивного противодействия, отключения и включения РЛПС 6, автоматически или вручную назначаются режимы и подрежимы работы МФИП 11, МФИВ 16, КИТК 12.
Взаимодействием с ООУ 13 летчик осуществляет применение назначенных средств и обеспечивает управление самолетом, функционирующим в режиме перехватчика и постановщика помех.
Например, при двухместном боевом применении самолета средствами РЛПС 6 зафиксирована дальняя вновь обнаруженная наземная цель (группа танков противника). При этом параметры цели заносятся в ПНИД 15 через ФПЭ 26, одновременно средствами КОЛС 4 обнаружен атакующий истребитель противника (опасная воздушная цель), в ДБП 28: назначаются средства сопровождения - РЛПС 6 для работы оператора, КОЛС 4 для работы летчика, назначаются средства поражения из состава КСПП 9 - ракеты "воздух-поверхность" средней и большой дальности (оператору), высокоманевренные ракеты "воздух-воздух" малой дальности (летчику), назначаются режимы индикации МФИП 11, КИТК 12, МФИВ 16 для индикаторов на рабочих местах летчика и оператора, назначается способ и порядок выполнения маневра против возможной атаки противника и собственной атаки, на основе оптимизации функционала условий выживаемости и решения боевой задачи формируется циклограмма подготовки и пуска выбранных средств, порядок выполнения маневра и выполнения полета после применения средств на основной (наземной) цели.
Выработанные команды поступают из ДБП 28 на средства индикации и управления летчика и оператора, которые через ООУ 13 обеспечивают управление системой вооружением в связи со сложившейся ситуацией.
Таким образом, самолет одновременно выполняет функции бомбардировщика, постановщика помех, истребителя и оперативного разведчика.
При ведении ближнего воздушного боя в ситуации использования летательного аппарата одновременно как истребителя и как постановщика помех обеспечивают выбор наиболее опасной цели, назначают средства поражения, активного и пассивного противодействия, способ и порядок выполнения маневрирования, работы со средствами сопровождения целей, формируют циклограмму подготовки и применения выбранных авиационных средств поражения на основе оптимизации функционала максимума возможного поражения противника и минимума собственных потерь.
Например, при одноместном боевом исполнении несколько ближних воздушных целей обнаружены и сопровождаются средствами КОЛС 4 и РЛПС 6, в БВБ 29:
- осуществляется выбор наиболее опасной цели,
- назначаются средства поражения, активного и пассивного противодействия,
- назначается способ и порядок выполнения маневрирования,
- назначается порядок работы с КОЛС 4, РЛПС 6,
- на основе оптимизации функционала максимума возможного поражения противника и минимума собственных потерь формируется циклограмма подготовки и применения выбранных средств.
В соответствии с выработанными командами, поступившими из БВБ 29 на МФИП 11, КИТК 12, МФИВ 16, летчик, взаимодействуя с ООУ 13, обеспечивает управление СУВ в сложившейся ситуацией боевого полета самолета, функционирующего как истребитель и постановщик помех.
В ситуации фиксации факта облучения самолета от радиолокационных средств мобильного зенитно-ракетного комплекса противника назначают средства поражения и пассивного противодействия, активного противодействия, порядок выполнения работ экипажу, способ и порядок выполнения противозенитного маневрирования и маневра последующей возможной атаки, формируют график подготовки и пуска средств поражения и пассивного противодействия, выполнения боевого маневрирования на основе оптимизации функционала минимума собственных потерь, максимума возможного поражения противника, при этом выдают рекомендации о действиях экипажа в сложившейся ситуации на основе индикации команд поступающих из вычислителя логического модуля ближнего воздушного боя или ближнего воздушного боя по поверхности.
Например, в двухместном (летчик, оператор) боевом применении самолета средствами КОЛС 4, РЛПС 6 обнаружена ближняя наземная цель - мобильная пусковая установка противника и средствами КСРП 7 зафиксирован факт облучения самолета от радиолокационных средств мобильного зенитно-ракетного комплекса противника, в БВП 30:
- назначаются средства поражения и пассивного противодействия из состава КСПП 9,
- назначаются средства активного противодействия из состава КСРП 7,
- назначается порядок выполнения работ летчиком и оператором,
- назначается способ и порядок выполнения противозенитного маневрирования и маневр последующей возможной атаки,
- на основе оптимизации функционала минимума собственных потерь, максимума возможного поражения противника формируется график подготовки и пуска средств поражения и пассивного противодействия, отключения РЛПС 6, выполнения боевого маневрирования.
Выработанные команды из БВП 30 поступают на средства индикации и управления летчика и оператора, которые через ООУ 13 обеспечивают управление самолетом, функционирующего как штурмовик и постановщик помех. Функционирование ДВБ 27, ДБП 28, БВБ 29, ББП 30 осуществляется также в учебно-тренировочном полете при двухместном учебно-боевом исполнении самолета с подыгрышем ситуаций, хранящихся в ОБД 19.
КОЛС 4 совместно с БАПДЦ 5 обеспечивает коррекцию целеуказаний управляемым ракетам в ситуации изменения маневра цели.
Это происходит следующим образом, с выхода КОЛС 4, сигналы пропорциональный угловому положению цели поступают на вход блока 5 анализа параметров движения цели (фиг.2) и соответственно на вход сумматора 47, вторые входы первого 43, второго 44 и третьего 45 делителей, первые входы пороговых устройств 32, а на вторые входы поступают сигналы с выходов задатчика 48 сигналов, тем самым обеспечивается дискретизация угловых положений цели в процессе ее сопровождения КОЛС 7.
Дискретные значения угловых положений цели с выхода пороговых устройств 32 через элемент ИЛИ 33 поступают на первые входы сдвигового регистра 35, который обнуляются перед началом работы совместно с счетчиками 40, 41, 42 за счет подачи сигнала с выхода дифференцирующей цепи 49 от источника питания (фиг.2).
Сигналы поступающие поочередно с первого, второго и третьего выходов сдвигового регистра 35 на первые входы первого 37, второго 38 и третьего 39 элементов И, обеспечивают поступления сигналов с выхода генератора 36 импульсов, на первые входы первого 40, второго 41 и третьего 42 счетчиков, которые обеспечивают измерения временных интервалов между поступающими дискретными угловыми положениями цели, при этом данные сигналы поступают на первые входы первого 43, второго 44 и третьего 45 делителей, на вторые входы которых поступают сигналы с первого входа блока 5 анализа параметров движения цели.
С выходов делителей (43, 44, 45) сигналы пропорциональные угловым скоростям движения цели, поступают через второй 34 элемент ИЛИ, интегратор 46 на первый вход сумматора 47.
На выходе сумматора 47, формируется сигнал прогнозируемого углового положения цели, который учитывает угловую скорость перемещения цели, данный сигнал, поступает на вход системы управления средствами поражения и пассивного противодействия, обеспечивая тем самым повышение точности целеуказаний управляемым ракетам.
В соответствии с фиг.1 БОЗВПР 6 совместно с БАПДЦ 5 обеспечивает возможность пуска ракеты в условиях скрытного наблюдения за целью.
Алгоритм работы БОЗВПР 6 в соответствии с фиг.3 и фиг.6а, фиг.6б обеспечивает не менее четырех засечек угловых положений воздушной цели и трех базовых расстояний, пролетаемых многофункциональным самолетом относительно опорных точек его траектории движения. Определяются взаимные положения летательных аппаратов на участках сближения в вертикальной плоскости: векторы дальностей до воздушной цели, расстояния, базовые расстояния, пролетаемые соответственно воздушной целью и многофункциональным самолетом, в виде системы уравнений:
где  ,
,  ,
,  ,
,  - вектора дальностей воздушной цели относительно опорных точек многофункционального самолета,
- вектора дальностей воздушной цели относительно опорных точек многофункционального самолета,  - вектора, соответствующие расстоянию пролетаемому воздушной целью относительно опорных точек,
- вектора, соответствующие расстоянию пролетаемому воздушной целью относительно опорных точек,  ,
,  ,
,  - вектора, соответствующие базовым расстояниям пролетаемые многофункциональным самолетом относительно опорных точек.
- вектора, соответствующие базовым расстояниям пролетаемые многофункциональным самолетом относительно опорных точек.
Преобразуются системы векторных уравнений в скалярную форму в вид:
где  - базовые расстояний пролетаемые многофункциональным самолетом относительно опорных точек.
- базовые расстояний пролетаемые многофункциональным самолетом относительно опорных точек.
Преобразуются системы скалярных уравнений в каноническую форму:
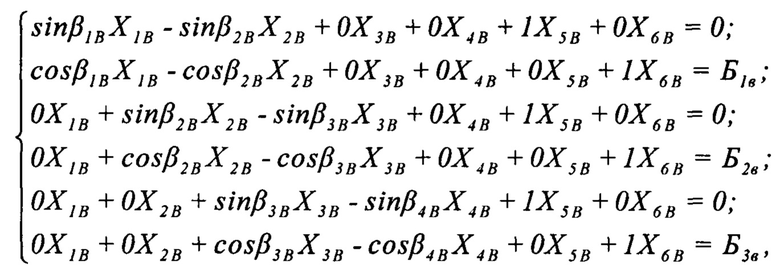
где  ;
;  ;
;  ;
;  ;
;  ;
;  - параметры скалярной системы уравнений, обозначенные в виде неизвестных. Вычисляются промежуточные значения в виде определителей матрицы:
- параметры скалярной системы уравнений, обозначенные в виде неизвестных. Вычисляются промежуточные значения в виде определителей матрицы:
ΔВ, 
где ΔΒ, - определитель матрицы, представляющую левую часть уравнения  - определитель матрицы, полученной из матрицы системы заменой i-го столбца столбцом свободных членов.
- определитель матрицы, полученной из матрицы системы заменой i-го столбца столбцом свободных членов.
Параметры сближения летательных аппаратов в вертикальной плоскости и аналогично в горизонтальной плоскостях определяются в виде:
 ,
, 
Координаты третьей и четвертой опорных точек воздушной цели на ее траектории в вертикальной и горизонтальной плоскостях определяются в виде:

Затем определяются координаты воздушной цели относительно третьей и четвертой опорных точек ее траектории в трехмерной системе координат:

Координаты многофункционального самолета в третьей и четвертой опорных точках его траектории определяются в виде:
П3 [(Б1+Б2); 0; 0]; П4 [(Б1+Б2+Б3); 0; 0],
На основе данных координат определяются расстояния относительно третьей и четвертой опорных точек воздушной цели в виде:
В процессе сближения многофункционального самолета с воздушной целью, при достижении дальности соответствующей области возможных пусков ракет, происходит формирование команды на разрешение пуска ракеты. При этом момент выдачи ракете команды «Пуск разрешен», определяется при достижении текущей дальности и углового положения заданных значений в виде выражения:

где  ,
,  - текущие дальности и угловые положения МФС относительно воздушной цели, ОВП - область возможных пусков ракет.
- текущие дальности и угловые положения МФС относительно воздушной цели, ОВП - область возможных пусков ракет.
Таким образом, предлагаемое управление вооружением многофункционального самолета обеспечивает определения возможности пуска ракет в условиях скрытного наблюдения за целью, при движении цели по наклонной траектории.
Источники информации
1. Современные истребители. - М. Хобби книга, 1994.
2. МиГ-29. Легкий фронтовой истребитель. - М: Любимая книга, 1998 г.
3. Су-27. История истребителя. - М.:РА Интервестник, 1999.
4. Истребитель Локхид - Мартин F-22 «Рэптор». - М.: Авиация и космонавтика, №1, 1998.
5. Пат. 2226166 Российская Федерация. МПК В64С 15/12, G01C 23/00, F41G 3/22. Многофункциональный самолет тактического назначения./ Барковский В.И., Горб B.C., Гуськов Ю.Н. и др., заявка: 2003123479/11, 29.07.2003, опубл. 27.03.2004, бюл. №9.
6. Пат. 2725928 Российская Федерация. МПК В64С 15/12, F41G 3/22. Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления. / Ефанов В.В., заявка: 2019134514, 28.10.2019, опубл. 07.07.2020, бюл. №19.
7. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981, с. 30, с. 474.
8. ГосНИИАС, НТИ "Авиационные системы", №4, 2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759058C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759057C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2757094C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2003 |
|
RU2226166C1 |
| Способ интеллектуальной поддержки командира группы истребителей при сопровождении ударных сил и система для его осуществления | 2023 |
|
RU2835465C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОЦЕЛЕВОГО ДВУХМЕСТНОГО САМОЛЕТА | 2000 |
|
RU2166794C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2003 |
|
RU2231478C1 |

Использование: изобретение относится к области управления вооружением многофункциональных самолетов тактического назначения. Сущность: способ заключается в создании интерактивной информационно-индикационной системы, которая обеспечивает запись в оперативную память с носителя полетных заданий данных об особенностях предстоящего полета, идентификацию и сопровождение воздушных и наземных целей в процессе полета на основе применения радиолокационных и оптических каналов, распознавание вертолетов, находящихся в режиме висения на основе анализа доплеровских частот, определение слабозаметных в радиолокационном спектре излучения малоразмерных наземных целей на основе изменения диаграммы излучения, оказание интеллектуальной поддержки экипажу в зависимости от ситуационной обстановки, выполнение координированных в пространстве и времени учебных и боевых функций истребителя, перехватчика, бомбардировщика, штурмовика, постановщика помех, оперативного разведчика, осуществление целеуказаний управляемым ракетам в условиях маневрирования цели на основе учета ее угловой скорости и обеспечение пуска ракет в условиях скрытного наблюдения за целью. Система управления вооружением многофункциональных самолетов содержит систему контроля и регистрации, комплексы навигационно-пилотажных средств, бортовой канал информационного обмена, блок анализа параметров движения цели, блок определения возможных зон пуска ракет, оптико-локационные прицельные средства и средства радиоэлектронного противодействия, радиолокационную прицельную систему, систему управления средствами поражения и пассивного противодействия, комплект средств поражения и пассивного противодействия, систему средств связи и опознавания, два многофункциональных индикатора, коллиматорный индикатор на лобовом стекле с телевизионной камерой, органы оперативного управления, приборы резервной индикации, переносной носитель исходных данных и бортовую вычислительную систему. В последней по магистрали вычислительного обмена взаимосоединены вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, формирования параметров целеуказания и применения, формирования отображаемой информации, ввода-вывода управления обменом, распознавания в радиолокационном спектре вертолетов в режиме висения, идентификации слабозаметных в радиолокационном спектре наземных целей, формирования параметров экстренного анализа полета, дальнего и ближнего воздушных боев и боев по поверхности. Технический результат: расширение функциональных возможностей за счет обеспечения пуска ракеты в условиях скрытного наблюдения за целью, при ее движении по наклонной траектории. 2 н. и 1 з.п. ф-лы, 7 ил.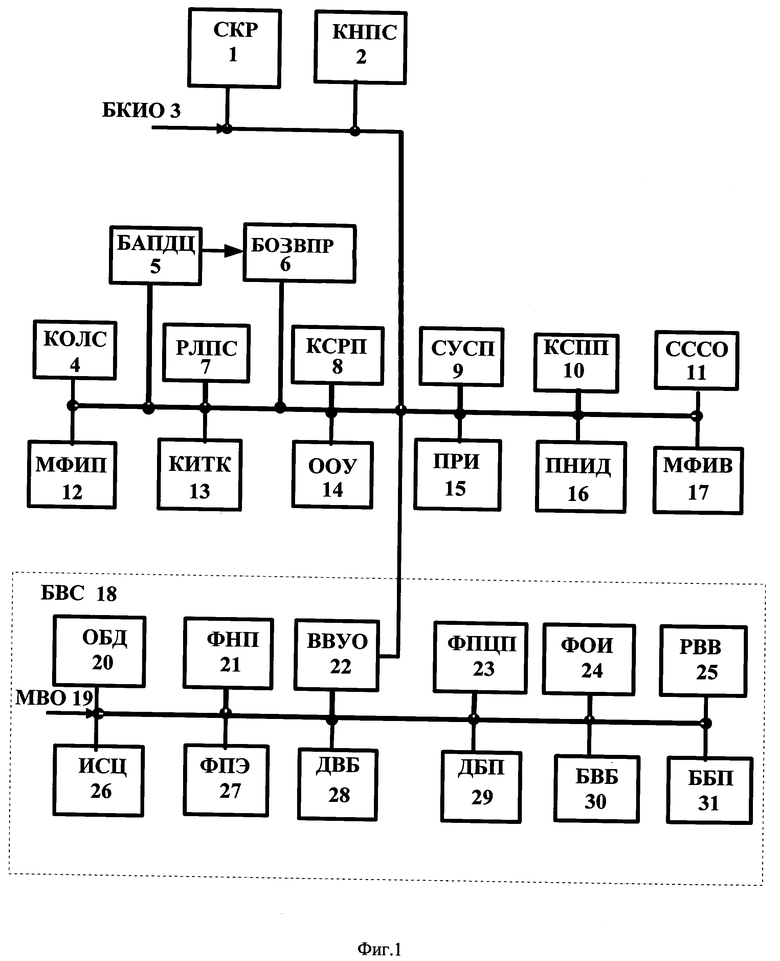
1. Способ управления вооружением многофункциональных самолетов тактического назначения, заключающийся в снаряжении летательных аппаратов перед полетами авиационными средствами поражения и средствами пассивного противодействия, осуществлении записи в оперативную память с носителя полетных заданий данных о параметрах полета - исходных данных для всех бортовых систем, параметров аэродромов, целей, характеристик режимов работы в полете, текстовых данных для индикаторов, применяемых авиационных средствах поражения, обеспечении энергопитания от бортовых источников при подготовке и применении авиационных средств поражения и средств пассивного противодействия, выдаче сигналов для идентификации имеющихся на борту средств поражения, их состояния и мест установки, идентификации и сопровождении воздушных и наземных целей в процессе полета на основе применения радиолокационных и оптических каналов, распознавании вертолетов, находящихся в режиме висения на основе анализа доплеровских частот, определении слабозаметных в радиолокационном спектре излучения малоразмерных наземных целей на основе изменения диаграммы излучения, определении факта обнаружения самолета на основе фиксации облучения радиолокационными станциями противника, осуществлении целеуказания на эти станции средств активных помех и систем наведения ракет с радиолокационными головками самонаведения, обеспечении беспоисковой связи между взаимодействующими в операции летательными аппаратами, приеме команд наведения, тактической обстановки от наземных пунктов управления и наведения, осуществлении отображения цветной и монохромной знакографической, телевизионной, картографической и смешанной информации, осуществлении комплексной обработки информации, фиксации координат и характеристик вновь обнаруженных целей, мнемокадров оперативной телевизионной информации по результатам разведки или боевого применения на носитель полетных заданий для записи и последующего воспроизведения после полета, оказании интеллектуальной поддержки экипажу в зависимости от ситуационной обстановки на основе функционирования вычислительно-логических модулей, при этом в ситуации обнаружения радиолокационной станцией дальней воздушной цели и фиксации факта облучения самолета радиолокационным излучением назначают средства поражения обнаруженной цели: ракеты "воздух-воздух" средней и большой дальности с тепловой и активной радиолокационной головкой самонаведения, средства пассивного противодействия, активных помех, формируют циклограмму подготовки и пуска средств противодействия на основе оптимизации функционала эффективности решения боевой задачи, в ситуации обнаружения наземной цели и одновременно атакующего истребителя противника назначают средства сопровождения, поражения, режимы индикации, способ и порядок выполнения маневра против возможной атаки противника и собственной атаки, формируют циклограммы подготовки и пуска выбранных средств и порядок выполнения маневра на основе оптимизации функционала условий выживаемости и решения боевой задачи, выдают рекомендации летчику о действиях в условиях сложившейся ситуации на основе поступления команд на средства индикации из вычислительно-логических элементов дальнего воздушного боя или дальнего боя по поверхности, при ведении ближнего воздушного боя в ситуации использования летательного аппарата одновременно как истребителя и как постановщика помех обеспечивают выбор наиболее опасной цели, назначают средства поражения, активного и пассивного противодействия, способ и порядок выполнения маневрирования, работы со средствами сопровождения целей, формируют циклограмму подготовки и применения выбранных авиационных средств поражения на основе оптимизации функционала максимума возможного поражения противника и минимума собственных потерь, в ситуации фиксации факта облучения самолета от радиолокационных средств мобильного зенитно-ракетного комплекса противника назначают средства поражения и пассивного противодействия, активного противодействия, порядок выполнения работ экипажу, способ и порядок выполнения противозенитного маневрирования и маневра последующей возможной атаки, формируют график подготовки и пуска средств поражения и пассивного противодействия, выполнения боевого маневрирования на основе оптимизации функционала минимума собственных потерь, максимума возможного поражения противника, при этом выдают рекомендации о действиях экипажа в сложившейся ситуации на основе индикации команд, поступающих из вычислителя логического модуля ближнего воздушного боя или ближнего воздушного боя по поверхности, осуществляют анализ динамики изменения углового положения цели на основе сравнения текущих значений с заданными значениями, определяют угловую скорость движения цели и осуществляют целеуказание ракете с учетом угловой скорости перемещения цели, отличающийся тем, что определяют возможность пуска ракет в условиях скрытного наблюдения за воздушной целью на основе косвенного определения дальности до воздушной цели и сравнения текущих значений дальности и угловых положений многофункционального самолета с заданными значениями, которые формируют исходя из границ зон возможных пусков ракет, определяют траекторию движения воздушной цели в трехмерном пространстве, и в случае идентификации параметров движения воздушной цели по наклонной траектории осуществляют не менее четырех засечек угловых положений воздушной цели и трех базовых расстояний, пролетаемых многофункциональным самолетом относительно опорных точек его траектории движения, определяют участки сближения относительно опорных точек, определяют взаимные положения летательных аппаратов на участках сближения : векторы дальностей до воздушной цели, расстояния, базовые расстояния, пролетаемые соответственно воздушной целью и многофункциональным самолетом в вертикальной и горизонтальных плоскостях, определяют координаты воздушной цели в трехмерном пространстве для опорных точек траектории многофункционального самолета, определяют дальность до воздушной цели в виде выражения:

где  ,
, 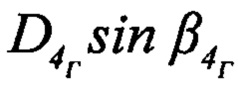 - координаты цели относительно четвертой опорной точки траектории многофункционального самолета, определяют момент выдачи ракете команды «Пуск разрешен» при достижении текущей дальности и углового положения заданных значений, которые определяют границы зоны возможных пусков ракет.
- координаты цели относительно четвертой опорной точки траектории многофункционального самолета, определяют момент выдачи ракете команды «Пуск разрешен» при достижении текущей дальности и углового положения заданных значений, которые определяют границы зоны возможных пусков ракет.
2. Система управления вооружением многофункциональных самолетов тактического назначения содержит систему контроля и регистрации, комплекс навигационно-пилотажных средств, бортовой канал информационного обмена, комплекс оптико-локационных прицельных средств, блок анализа параметров движения цели, вход-выход которого соединен с бортовым каналом информационного обмена, радиолокационную прицельную систему, комплекс средств радиоэлектронного противодействия, систему управления средствами поражения и пассивного противодействия, комплект средств поражения и пассивного противодействия, систему средств связи и опознавания, первый многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, переносной носитель исходных данных, второй многофункциональный индикатор и бортовую вычислительную систему, включающую взаимосоединенные входами-выходами по магистрали вычислительного обмена вычислительно-логические модули объединенной базы данных, формирования навигационно-пилотажных параметров, формирования параметров целеуказания и применения, формирования отображаемой информации, ввода-вывода управления обменом, соответствующий вход-выход которого является входом-выходом бортовой вычислительной системы, подключенным к бортовому каналу информационного обмена, введенными в состав бортовой вычислительной системы и подключенными к магистрали вычислительного обмена вычислительно-логическими модулями распознавания в радиолокационном спектре вертолетов, находящихся в режиме висения, идентификации слабозаметных в радиолокационном спектре малоразмерных наземных целей, формирования параметров экстренного анализа полета, дальнего воздушного боя, дальнего боя по поверхности, ближнего воздушного боя и ближнего боя по поверхности, при этом взаимосоединенные по бортовому каналу информационного обмена первый многофункциональный индикатор, коллиматорный индикатор на лобовом стекле с телевизионной камерой обзора закабинного пространства, органы оперативного управления, приборы резервной индикации, второй многофункциональный индикатор и бортовая вычислительная система образуют индикационно-информационную интерактивную систему управления ситуациями полета, радиолокационная прицельная система во взаимодействии через бортовой канал информационного обмена с комплексом навигационно-пилотажных средств, комплексом средств радиоэлектронного противодействия, системой управления средствами поражения и пассивного противодействия, комплектом средств поражения и пассивного противодействия, системой контроля и регистрации, индикационно-информационной интерактивной системой управления ситуациями полета образует радиолокационный канал обнаружения, селекции, сопровождения ориентиров и целей и применения по ним средств поражения, средств активного и пассивного противодействия, а комплекс оптико-локационных прицельных средств во взаимодействии с комплексом средств радиоэлектронного противодействия, системой контроля и регистрации, комплектом средств поражения и пассивного противодействия, индикационно-информационной интерактивной системой управления ситуациями полета образуют оптико-локационный канал обнаружения, селекции, сопровождения ориентиров и целей и применения по ним средств поражения и средств активного и пассивного противодействия; радиолокационный и оптико-локационный каналы обнаружения, селекции, сопровождения ориентиров и целей и применения средств поражения и средств активного и пассивного противодействия во взаимодействии образуют комплексную интерактивную систему управления применением самолета, осуществляющего координированные в пространстве и времени учебные функции и боевые функции истребителя, перехватчика, бомбардировщика, штурмовика, постановщика помех и оперативного разведчика в одноместном боевом и двухместном учебно-боевом исполнении, блок анализа параметров движения цели состоит из n пороговых устройств, элемента ИЛИ, сдвигового регистра, генератора импульсов, первого, второго и третьего элементов И, первого второго и третьего счетчиков, первого, второго и третьего делителя, интегратора, сумматора, задатчика сигналов, дифференцирующей цепи, при этом вход блока анализа параметров движения цели соединен с входом сумматора, вторыми входами первого, второго, третьего делителей и первыми входами пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, а выходы которых через первый элемент ИЛИ соединены с первым входом сдвигового регистра, второй вход которого и вторые входы первого, второго и третьего счетчиков соединены с выходом дифференцирующей цепи, вход которой соединен с выходом источника питания, первый, второй и третий выходы сдвигового регистра соединены с первыми входами первого, второго и третьего элементов И, а вторые входы соединены с выходом генератора импульсов, выходы первого, второго и третьего элементов И соединены с первыми входами первого, второго и третьего счетчиков, выходы которых соединены с первыми входами делителей, выходы которых через второй элемент ИЛИ и интегратор соединен с первым входом сумматора, выход которого является выходом блока анализа параметров движения цели, отличающаяся тем, что дополнительно введен блок определения зоны возможных пусков ракет в условиях скрытного наблюдения за воздушной целью, вход которого соединен с выходом блока анализа параметров движения целей, а выход - с бортовым каналом информационного обмена.
3. Система управления вооружением многофункциональных самолетов тактического назначения по п. 2, отличающаяся тем, что алгоритм работы блока определения зон возможных пусков ракет в условиях скрытного наблюдения за целью заключается в том, что осуществляют анализ траектории движения воздушной цели в трехмерном пространстве, и в случае идентификации движения воздушной цели по наклонной траектории на основе анализа изменений угловых положений воздушной цели в виде выражения:
εв ≠ 0, ег ≠ 0,
осуществляют не менее четырех засечек угловых положений воздушной цели и трех базовых расстояний, пролетаемых многофункциональным самолетом относительно опорных точек его траектории движения, определяют участки сближения относительно опорных точек, определяют взаимные положения летательных аппаратов на участках сближения в вертикальной плоскости: векторы дальностей до воздушной цели, расстояния, базовые расстояния, пролетаемые соответственно воздушной целью и многофункциональным самолетом, в виде системы уравнений:
где  ,
,  ,
,  ,
,  - вектора дальностей воздушной цели относительно опорных точек многофункционального самолета,
- вектора дальностей воздушной цели относительно опорных точек многофункционального самолета,  - вектора, соответствующие расстоянию, пролетаемому воздушной целью относительно опорных точек,
- вектора, соответствующие расстоянию, пролетаемому воздушной целью относительно опорных точек,  ,
,  ,
,  - вектора, соответствующие базовым расстояниям, пролетаемым многофункциональным самолетом относительно опорных точек, преобразуют систему векторных уравнений в скалярную форму в виде:
- вектора, соответствующие базовым расстояниям, пролетаемым многофункциональным самолетом относительно опорных точек, преобразуют систему векторных уравнений в скалярную форму в виде:
где  - базовые расстояния, пролетаемые многофункциональным самолетом относительно опорных точек, преобразуют системы скалярных уравнений в каноническую форму:
- базовые расстояния, пролетаемые многофункциональным самолетом относительно опорных точек, преобразуют системы скалярных уравнений в каноническую форму:
где  ;
;  ;
;  ;
;  ;
;  ;
;  - параметры скалярной системы уравнений, обозначенные в виде неизвестных, вычисляют промежуточные значения в виде определителей матрицы:
- параметры скалярной системы уравнений, обозначенные в виде неизвестных, вычисляют промежуточные значения в виде определителей матрицы:
ΔΒ, 
где ΔΒ, - определитель матрицы, представляющей левую часть уравнения - определитель матрицы, полученной из матрицы системы заменой i-го столбца столбцом свободных членов, определяют параметры сближения летательных аппаратов в вертикальной плоскости и аналогично в горизонтальной плоскости в виде:
 ,
, 
определяют координаты воздушной цели относительно третьей и четвертой опорных точек ее траектории относительно вертикальной и горизонтальной плоскостей:

определяют координаты воздушной цели относительно третьей и четвертой опорных точек ее траектории в трехмерной системе координат:

определяют координаты многофункционального самолета в третьей и четвертой опорных точках его траектории:
П3 [(Б1 + Б2); 0; 0]; П4 [(Б1 + Б2 + Б3); 0; 0],
определяют расстояния относительно третьей и четвертой опорных точек траектории воздушной цели в виде:
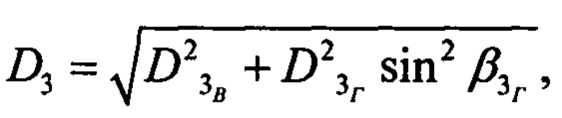

определяют момент выдачи ракете команды «Пуск разрешен», при достижении текущей дальности и углового положения заданных значений в виде:
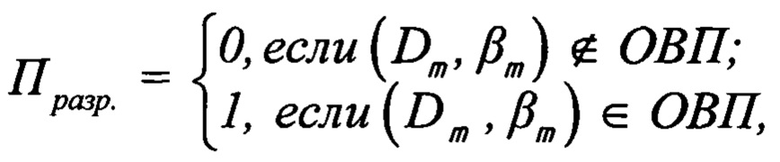
где  ,
,  - текущие дальности и угловые положения МФС относительно воздушной цели, ОВП - область возможных пусков ракет.
- текущие дальности и угловые положения МФС относительно воздушной цели, ОВП - область возможных пусков ракет.
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ЗАЛПОМ АТМОСФЕРНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2691233C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206043C1 |
| US 9803958 B2, 31.10.2017 | |||
| WO 2016122430 A1, 04.08.2016 | |||
| US 9916277 B2, 13.03.2018. | |||

