Изобретение относится водному транспорту, в частности, к индивидуальным средствам передвижения на воде и предназначено для занятия водными видами спорта и отдыха на тихой и бурной воде.
Известна моторная лодка малого размера (DE 10159040 A1, А63В 69/00, 12.09.2002), предназначенная для занятия водными видами спорта, такими как водные лыжи или вейкборд, и выполненная с возможностью дистанционного управления буксируемым лыжником. Моторная лодка содержит корпус, выполненный в нижней части арочного типа на двух полозьях и содержащий лопасти управления, двигатель, винт, имеющий привод от двигателя, аккумуляторную батарею, рукоятку, выполненную с возможностью управления оборотами двигателя и содержащую кнопки управления двигателем. При этом, рукоятка соединяется с моторной лодкой посредством троса, в который интегрирован электрический кабель управления.
Недостатком данного технического решения является недостаточная маневренность и управляемость, отсутствие возможности регулировать центр тяжести моторной лодки.
Наиболее близки аналогом изобретения является устройство для буксировки водного лыжника (AU 7185874 А, В63В 35/81, 05.02.1976), содержащее беспилотный катер, имеющий рулевое устройство, двигатель, оснащенный водометной установкой и рычагом управления дросселем, буксирный трос, закрепленный на конце на лодке и проходящий от нее назад, рукоятку управления, прикрепленную к противоположному концу буксирного троса и имеющую средства управления оборотами двигателя, гидравлический привод, соединяющий рулевое устройство на лодке с рукояткой управления и включающие ведомый механизм с гидравлическим привод поворота рулевого устройства лодки, главный блок управления, установленный на рукоятке, шланги, проходящие вдоль буксирной линии и соединяющие гидравлический привод поворота с главным блоком управления.
Недостатком данного технического решения является недостаточная маневренность и управляемость, отсутствие возможности регулировать центр тяжести моторной лодки, а также сложность изготовления беспилотного катера за счет использования гидравлического привода управления.
Целью изобретения является создание тягача водного лыжного (далее - ТВЛ), не имеющего указанных выше недостатков и обладающего улучшенными по сравнению с аналогами эксплуатационными характеристиками.
Технический результат заключается в улучшении эксплуатационных характеристик, заключающихся в повышении маневренности и улучшении управляемости, за счет использования водометных турбин и за счет регулировки центра тяжести, путем перемещения аккумуляторных батарей в корпусе ТВЛ и/или с помощью балластной системы, а также в повышении безопасности и комфорта управления, за счет стыковки и расстыковки лыж от ТВЛ для дистанционного маневрирования и выполнения трюков.
В соответствии с целями и преимуществами, описанными здесь, и для решения вышеуказанных проблем был разработан тягач водный лыжный (далее - ТВЛ), содержащий корпус, силовую установку, аккумуляторные отсеки, держак-ручку, содержащие кнопки управления в ней и соединенную с ТВЛ посредством мягкой сцепки, отличающийся тем, что корпус ТВЛ имеет возможность регулировки центра тяжести, путем перемещения аккумуляторных батарей в аккумуляторных отсеках и/или с помощью балластной системы, а силовая установка ТВЛ содержит электродвигатели и водометные турбины, причем ТВЛ дополнительно содержит лыжи и/или монолыжу, лебедку и бортовой компьютер, выполненный с возможностью управления ТВЛ, ТВЛ также содержит телескопическую направляющую, раздвигающуюся при дистанцировании лыжника, имеющую жесткую точку опоры ближе к задней части корпуса ТВЛ для предотвращения дисбаланса в управляемости и выполненную с возможностью пропускать мягкую сцепку, намотанную на лебедку для соединения держака-ручки с ТВЛ, телескопическая направляющая дополнительно содержит фиксатор горизонтального положения и телескопические опоры, при этом кнопки управления держака-ручки выполнены с возможностью передачи сигналов бортовому компьютеру, а лыжи и/или монолыжа имеют возможность стыковки и расстыковки с ТВЛ посредством механизма фиксации лыж и/или монолыжи.
В другом варианте выполнения ТВЛ имеет три одинаковых механизма фиксации, подъема, опускания и ограниченного вращения лыж (далее -МФПООВЛ), содержащие шаговые или ускоренные электро-серводвигатели, либо пневматический привод, опорную площадку для крепления к корпусу ТВЛ, корпус кулака и кулак в нем, выполненый с возможностью ограниченного вращения, электромагнит для соединения с ботинком, стабилизационно-центрирующую пружину, помогающую лыжнику держать лыжи в среднем положении, прижимную площадку и упор для ботинка лыжного.
В другом варианте выполнения ТВЛ имеет лыжи и/или монолыжу, у которых корпус выполнен из пластика, а оголовок лыж изготавливается с нанесением резиновых эластичных материалов.
В другом варианте выполнения ТВЛ имеет лыжи и/или монолыжу, у которых гребешковые направляющие выполнены складывающимися, посредством подачи напряжения от ТВЛ в электромагнитный клапан, расположенный в задней части лыж.
В другом варианте выполнения ТВЛ имеет лыжи и/или монолыжу, с направляющим гребешком, встроенным в корпусе лыжи.
В другом варианте выполнения ТВЛ имеет гладкие водные лыжи и/или монолыжу.
В другом варианте выполнения ТВЛ имеет ботинки, крепление для ботинка с лыжей, причем ботинок снабжен защитной пластиной ног с направляющей для стыковки и металлической пластиной, расположенный в верхней носовой части ботинка, для соединения с электромагнитом МФПООВЛ, встроенный в подошву ботинка электромагнит и электромагнитные застежки ботинка, а в крепление лыж к ботинку встроена металлическая пластина с направляющей для крепления ботинка к лыже.
В другом варианте выполнения ТВЛ имеет кнопки управления, встроенные в держак-ручку и подающие команду компьютеру через мягкую сцепку со встроенным в нее кабелем, либо дистанционно посредством радиоуправления, причем кнопки управления представляют собой кнопку блокировки ТВЛ, кнопку фиксации держака-ручки с телескопической направляющей, параллельно включающая телескопические опоры, джойстик наматывания и разматывания мягкой сцепки лебедкой, кнопки управления оборотами тяговых электродвигателей, и кнопку фиксации оборотов двигателей.
В другом варианте выполнения ТВЛ имеет держак-ручку, содержащий электромагнитный фиксатор, жестко соединяющий телескопическую направляющую с держаком-ручкой в режиме стыковки с ТВЛ.
В другом варианте выполнения ТВЛ имеет панель приборов, где расположены дисплей для определения скорости, приборы работы датчиков, определяющие работу оборудования ТВЛ и навигационное оборудование, выполненное с возможностью заложения и исполнения маршрута в режиме беспилотного управления, и кнопки управления, расположенные в корпусе ТВЛ, представляющие собой главную кнопку подачи напряжения от аккумуляторных батарей, трех ходовой тумблер, кнопку застежки ботинок, кнопку крепления ботинок к лыжам, кнопку регулировки балластом воды, кнопку подъема гребешка лыж и кнопки отключения: балласта воды, подъема гребешка, крепления ботинок к лыже, кнопки застежки ботинок.
В другом варианте выполнения ТВЛ имеет телескопическую направляющую с возможностью раздвигаться и менять угол наклона в момент дистанцирования лыжника, соединяться с держаком-ручкой путем применения электромагнита, пропускать через себя мягкую сцепку и иметь жесткую точку опоры ближе к задней части корпуса ТВЛ для предотвращения дисбаланса в управляемости.
В другом варианте выполнения ТВЛ в телескопической направляющей с двух сторон применяется конусообразный резиновый хвостик со вставленными внутри кольцами скольжения, причем сверху хвостик обжимается конусообразной пружиной, имеющей уменьшение диаметра, а металлический пруток пружины к сужению конуса также имеет уменьшение диаметра, при этом внутри хвостика проходит мягкая сцепка со встроенным кабелем.
В другом варианте выполнения ТВЛ имеет лебедку, при помощи которой лыжник дистанцируется на необходимое расстояние содержащую мягкую сцепку, в которую интегрирован электрический или оптический кабель для передачи сигналов управления от кнопок держака-ручки в бортовой компьютер ТВЛ.
В другом варианте выполнения ТВЛ оснащен поясом лыжника, выполненным эластичных резиноподобных материалов с магнитными застежками и имеющим встроенный сигнальный радиопередатчик для обнаружения лыжника на случай нештатной ситуации, при этом пояс также содержит встроенный в задней части кабель с розеткой и штекером для подачи напряжения к электромагниту ботинка лыжника, электромагниту застежек ботинка и электромагнитному клапану гребешка лыж.
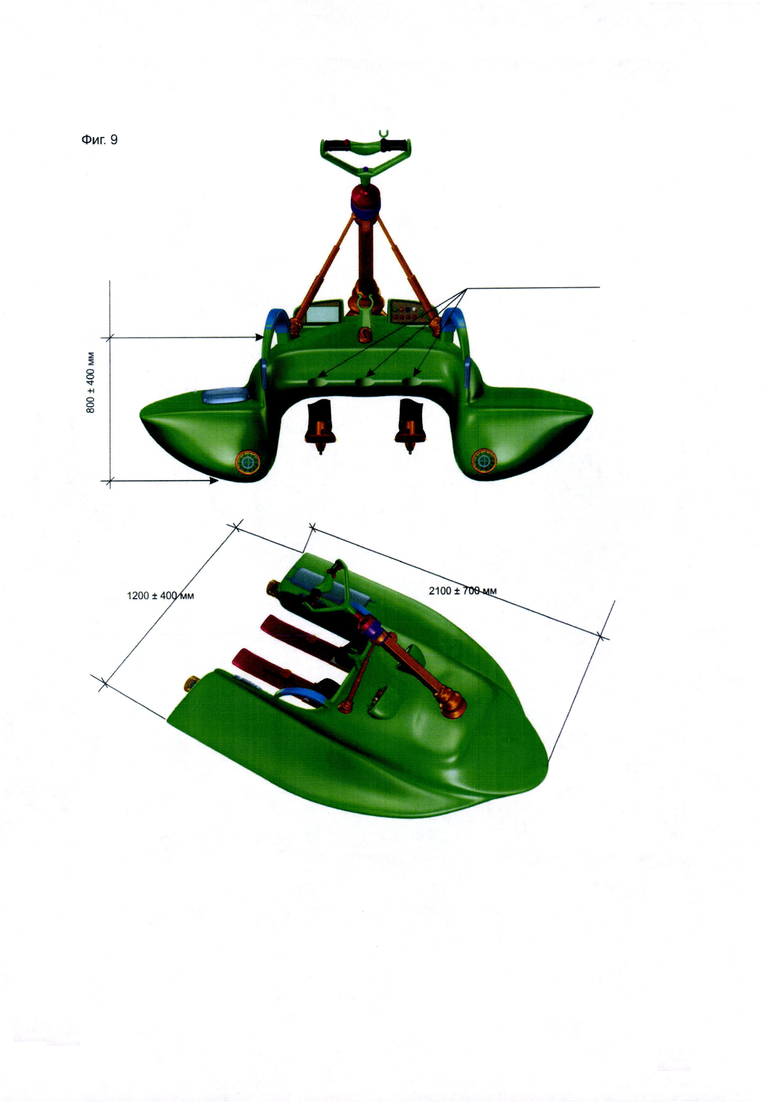
В другом варианте выполнения ТВЛ имеет корпус, у которого ориентировочные габаритные размеры находятся в следующих диапазонах: длинна 2100±700 мм, ширина 1200±400 мм, высота 800±400 мм, примерный вес в диапазоне от 180 до 360 кг.
В другом варианте выполнения ТВЛ имеет корпус, выполненный из стеклопластика с внутренними усиленными перегородками и ребрами жесткости арочного типа, при этом расстояние между нижней арочной части ТВЛ и поверхностью воды с учетом водоизмещения ТВЛ позволяет лыжам проходить под арочной частью корпуса ТВЛ.
В другом варианте выполнения на ТВЛ применяется воздушный компрессор, а механизм подъема и опускания лыж выполнен пневматическим.
В другом варианте выполнения на ТВЛ применяются пневматические заслонки для защиты механизма подъема и опускания лыж, расположенных в карманах на днище ТВЛ для исключения попадания в карман оголовка лыжи.
В другом варианте выполнения на ТВЛ применяется рассекатель-преобразователь водометной струи, который рассекает водную струю, исходящую из водометных турбин для образования волнового вала.
В другом варианте выполнения ТВЛ имеет водометные турбины, кторые могут менять угол наклона по горизонтали и по вертикали.
В другом варианте выполнения ТВЛ содержит сиденье для лыжника.
В другом варианте выполнения ТВЛ содержит два или более мест для сидений, одно из которых расположено по центру.
В другом варианте выполнения ТВЛ на случай нештатной ситуации предусмотрена радиоуправляемая автоматическая система поиска лыжника, управляемая компьютером, срабатывающая после сбрасывания лыжником кнопки блокировки ТВЛ, расположенной на держаке-ручке, и осуществляющая поиск лыжника по сигналам датчика, встроенного в пояс лыжника.
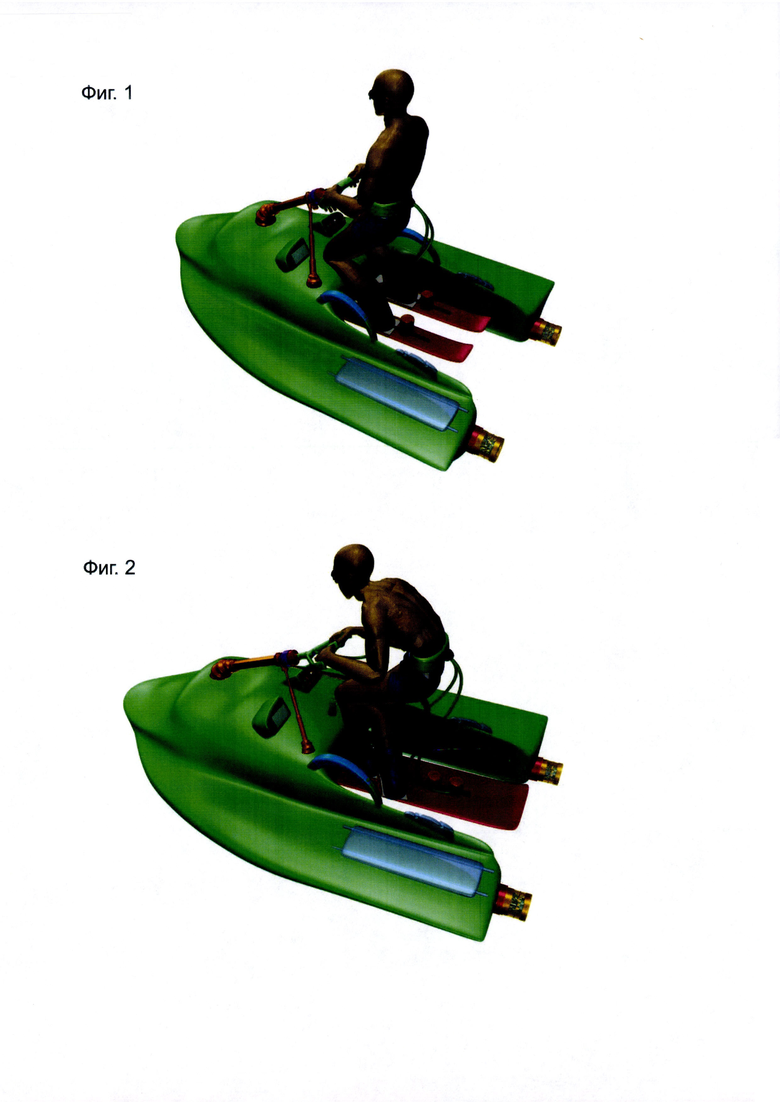
Фиг. 1 - общий вид ТВЛ в режиме стыковки с лыжником на лыжах;
Фиг. 2 - общий вид ТВЛ в режиме стыковки с лыжником на монолыже;
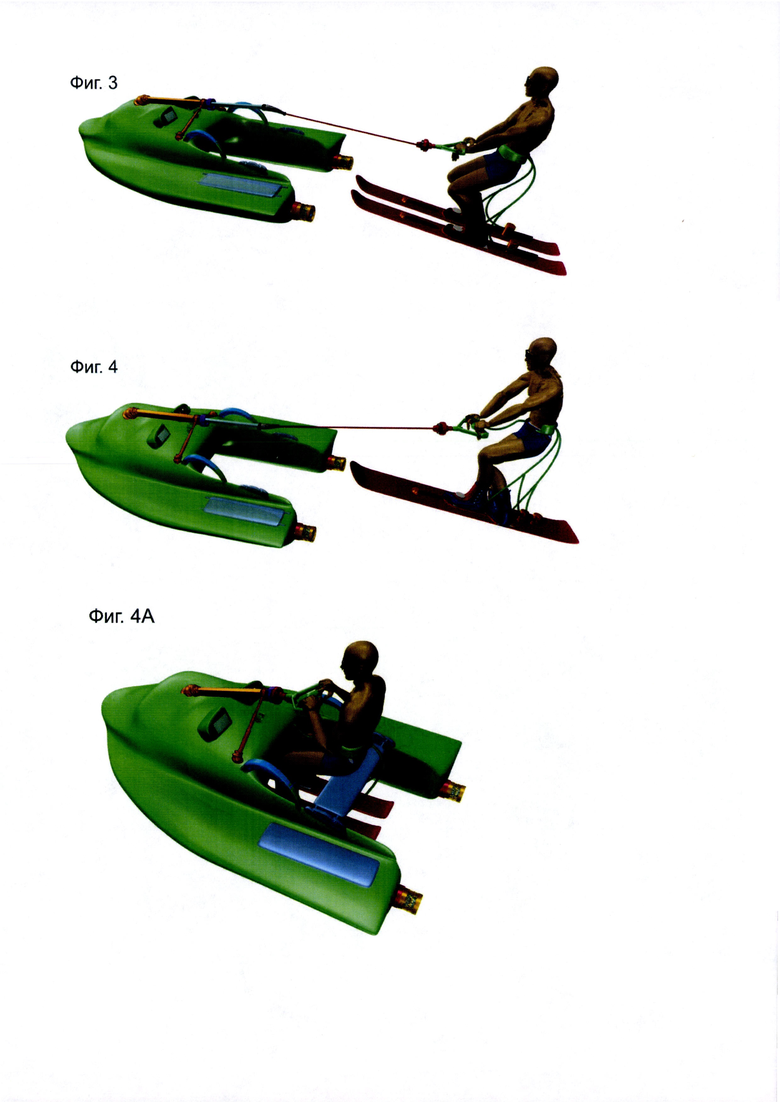
Фиг. 3 - общий вид ТВЛ в режиме дистанционного управления лыжником на лыжах;
Фиг. 4 - общий вид ТВЛ в режиме дистанционного управления лыжником на монолыже;
Фиг. 4 А - общий вид ТВЛ в режиме отдыха лыжника;
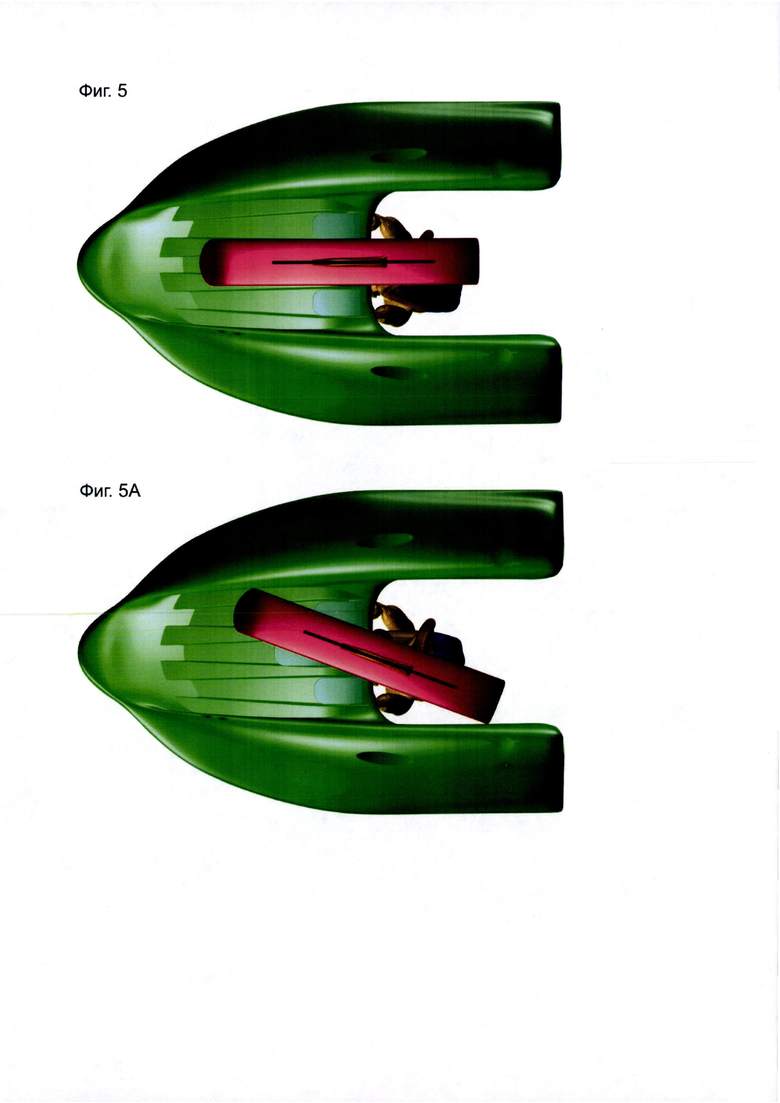
Фиг. 5 - вид на ТВЛ снизу в режиме стыковки с монолыжей;
Фиг. 5 А - вид на ТВЛ снизу в режиме управления монолыжей;
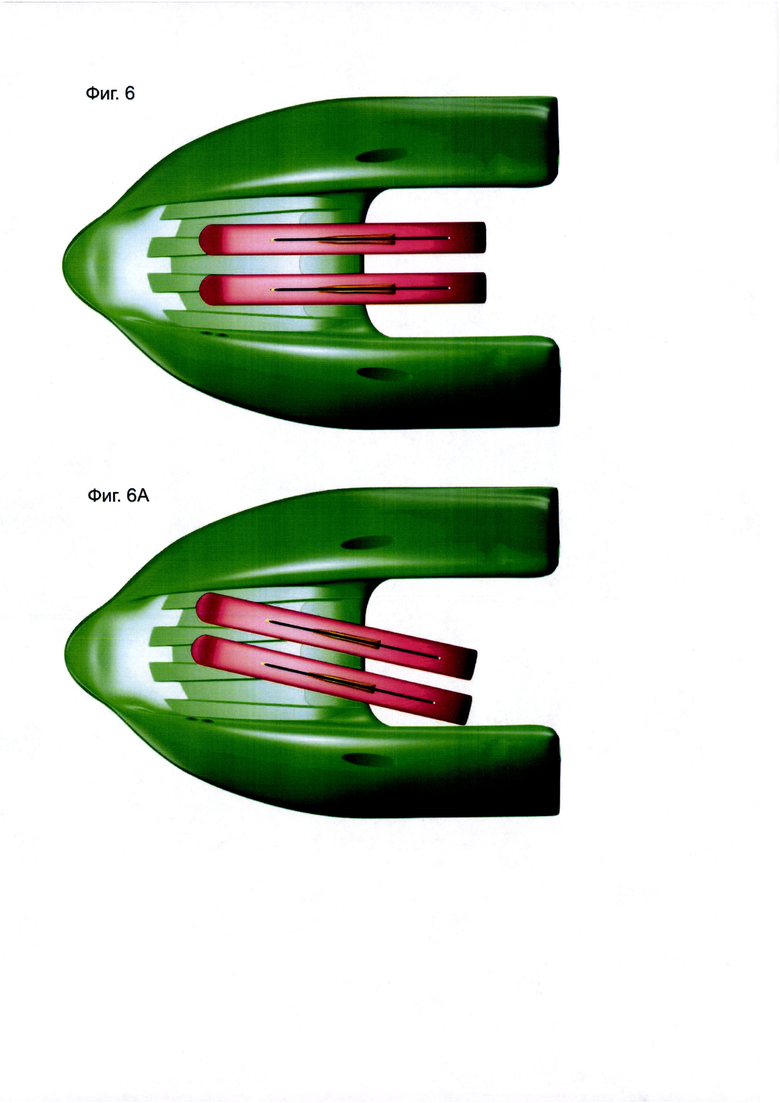
Фиг. 6 - вид на ТВЛ снизу в режиме стыковки с лыжами;
Фиг. 6 А - вид на ТВЛ снизу в режиме управления лыжами;
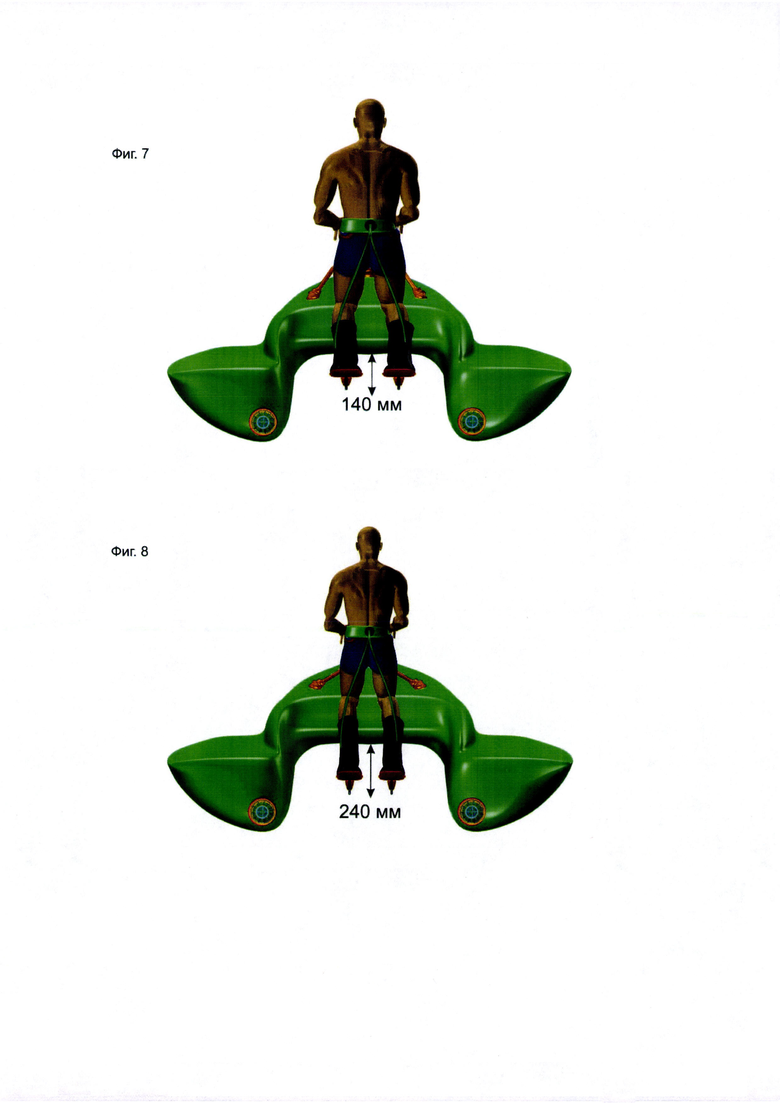
Фиг. 7 - вид на ТВЛ сзади в режиме регулировки высоты нахождения лыж относительно ТВЛ в зависимости от веса лыжника, тяжелый лыжник;
Фиг. 8 - вид на ТВЛ сзади в режиме регулировки высоты нахождения лыж относительно ТВЛ в зависимости от веса лыжника, легкий лыжник;
Фиг. 9 - общий вид и габаритные размеры ТВЛ;
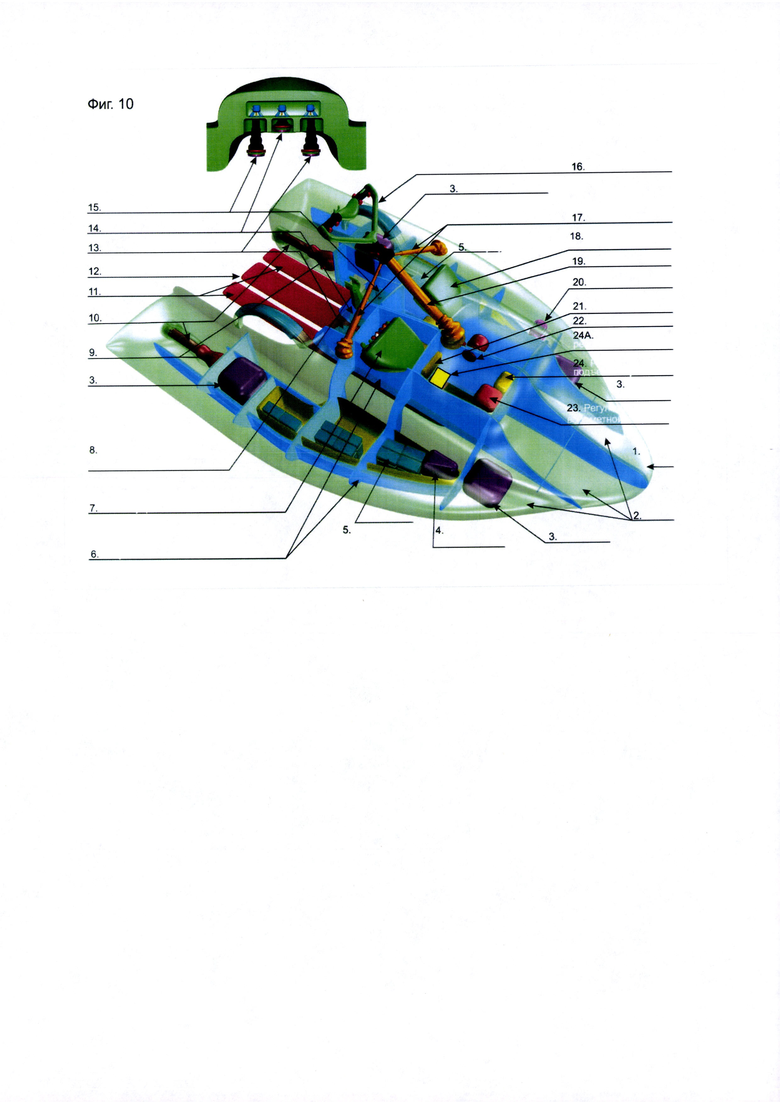
Фиг. 10 - общий вид, расположение конструктивных элементов и навесного оборудования ТВЛ с электромагнитными устройствами;
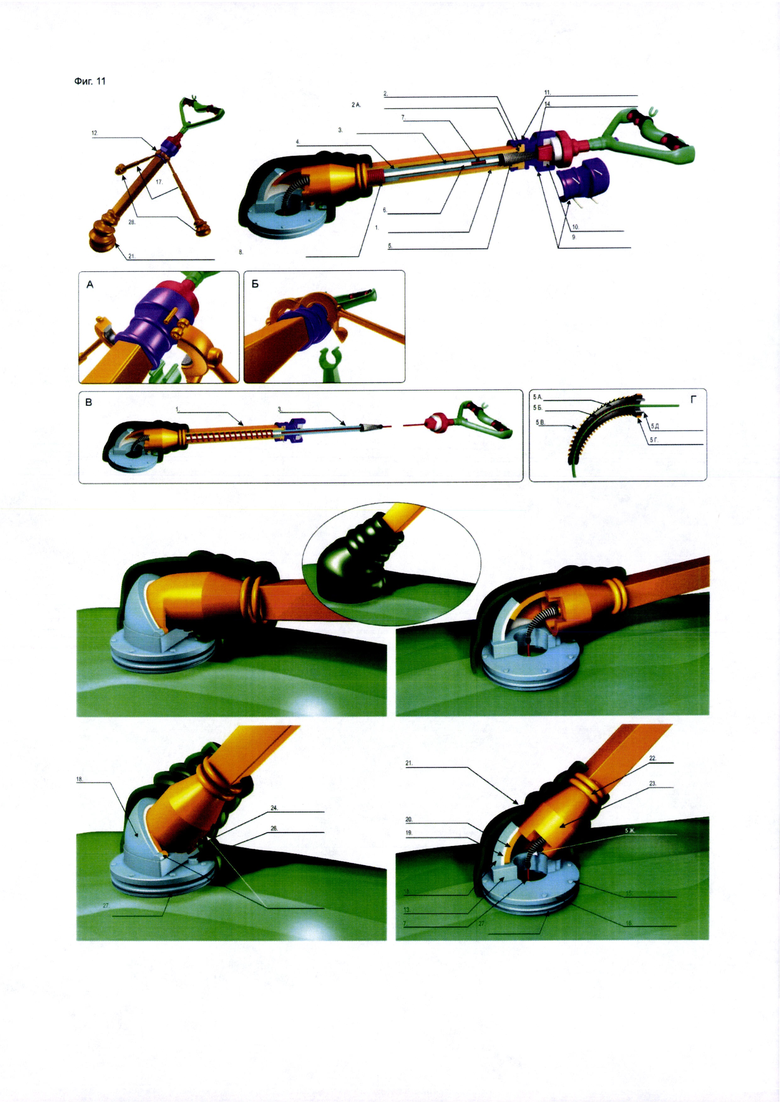
Фиг. 11 - телескопическая направляющая с держаком-ручкой;
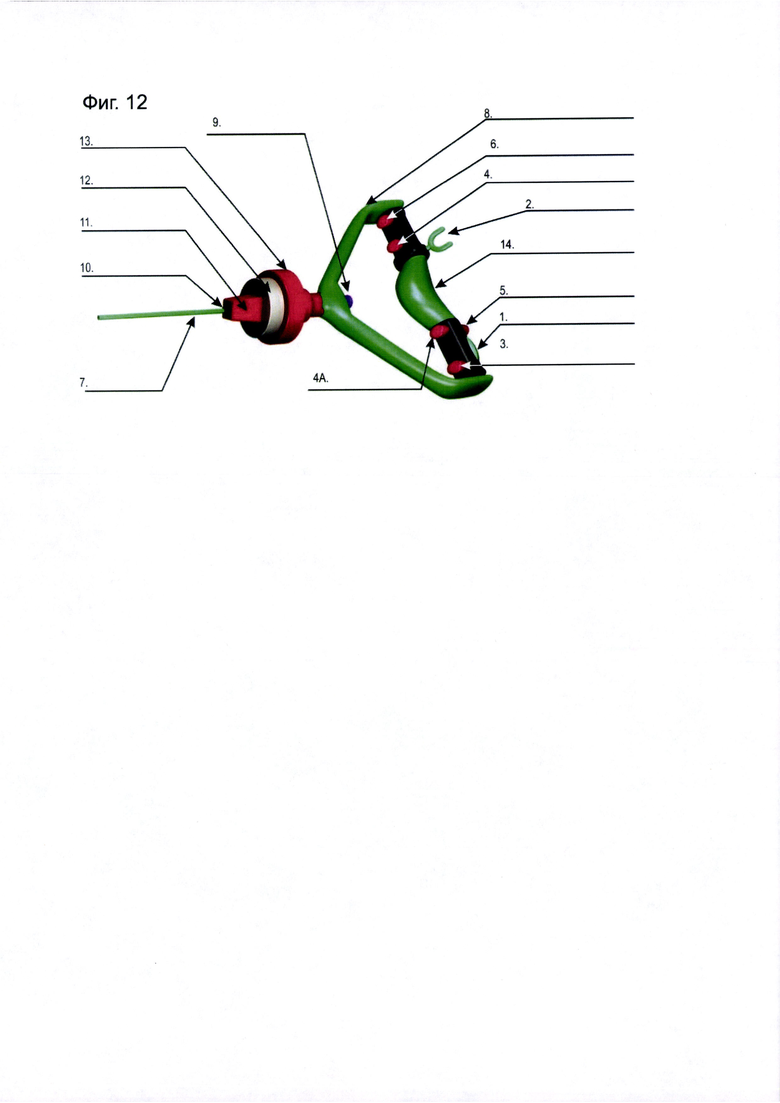
Фиг. 12 - держак-ручка с кнопками управления;
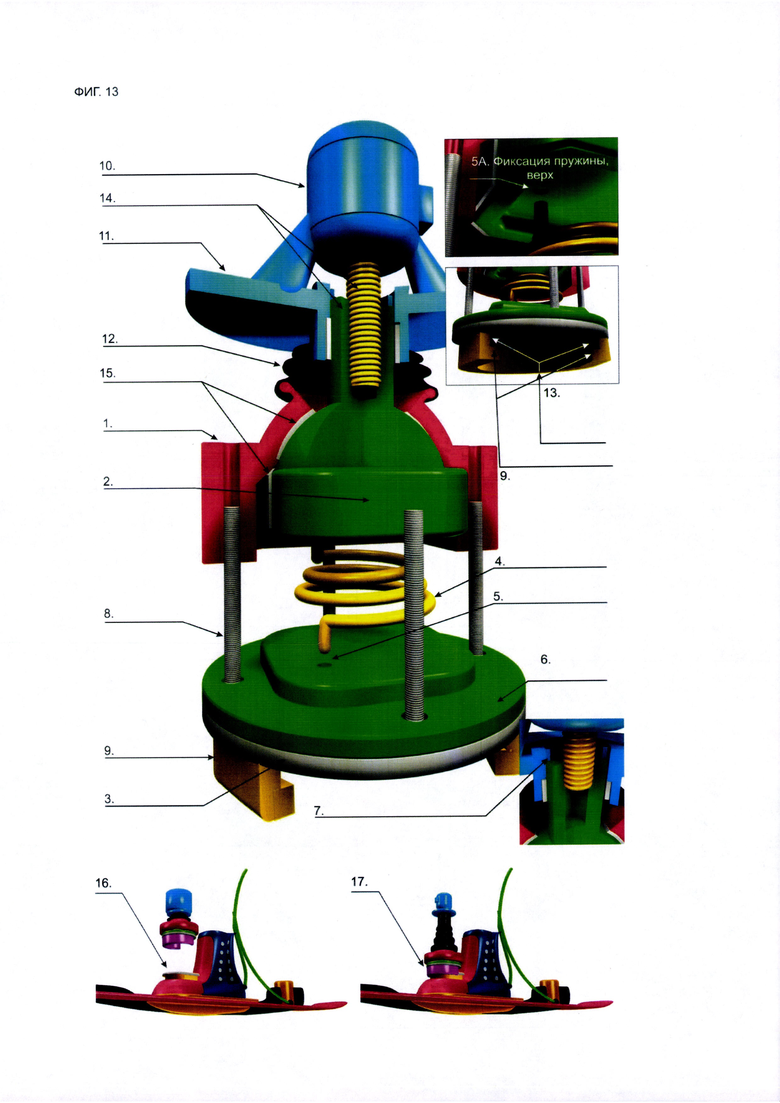
Фиг. 13 - три одинаковых механизма фиксации, подъема, опускания и ограниченного вращения лыж, для каждой лыжи индивидуально, в которых подъем и опускание лыж осуществлено посредством шагового электродвигателя.
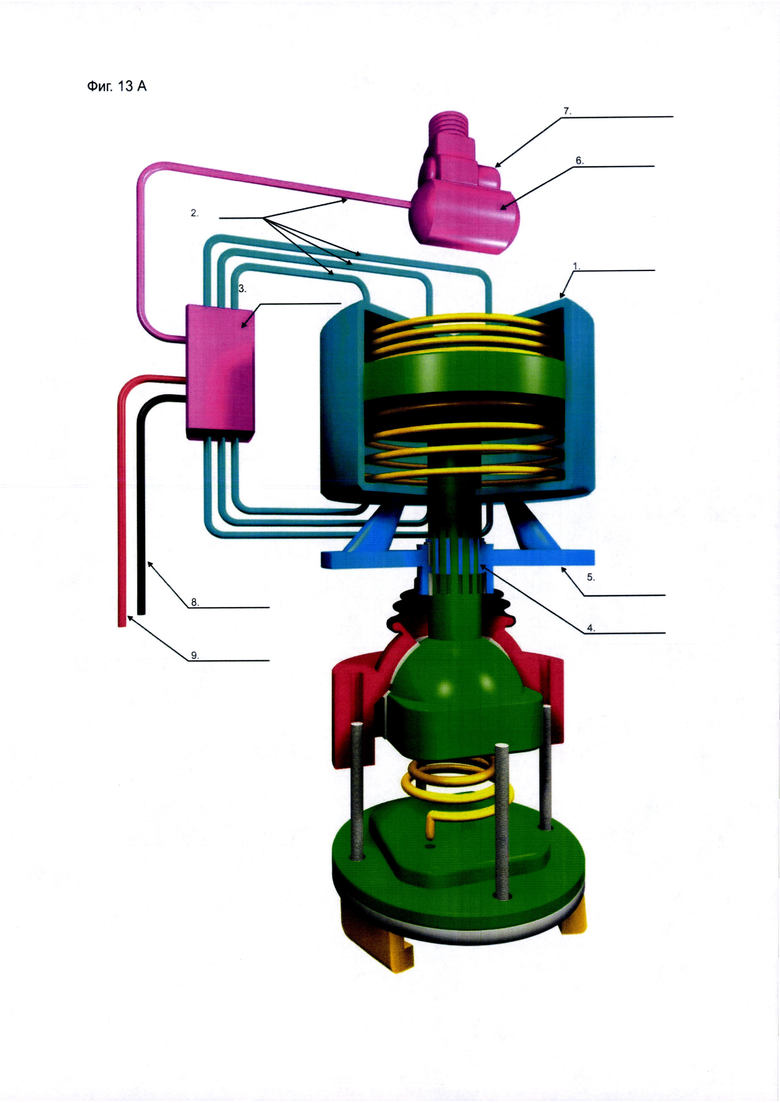
Фиг. 13 А - три одинаковых механизма фиксации, подъема, опускания и ограниченного вращения лыж, подъем и опускание осуществлено посредством пневматики;
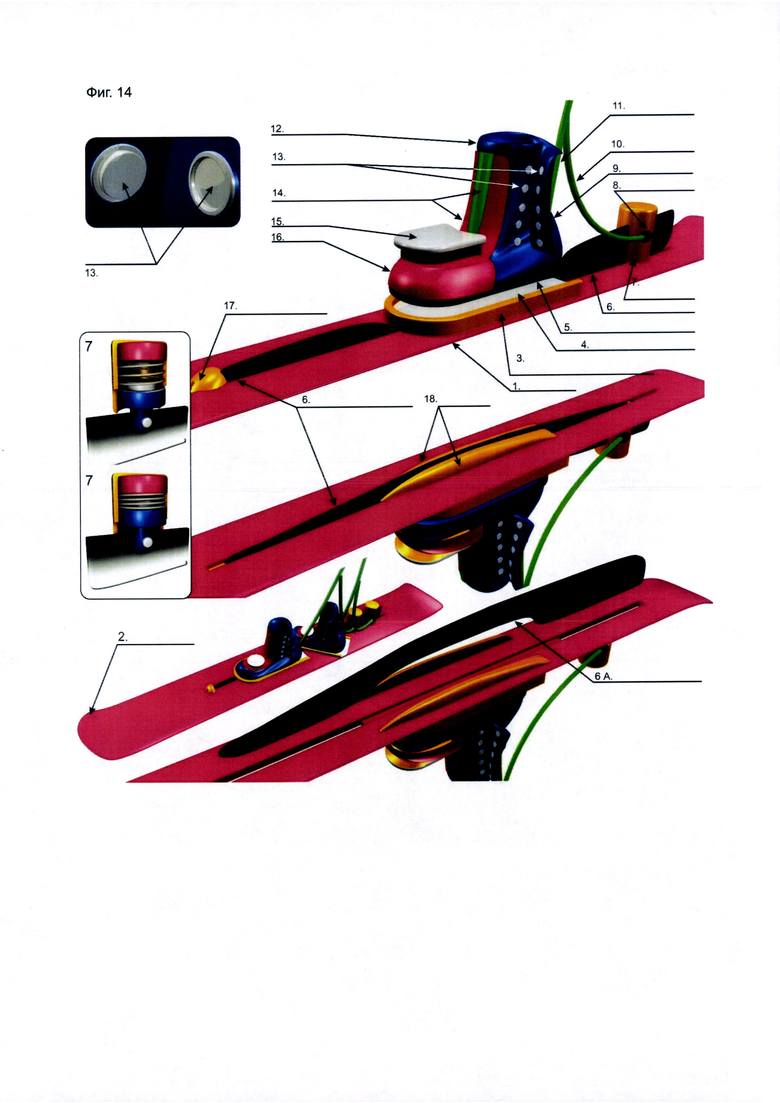
Фиг. 14 - лыжи с выдвижным гребешком, с ботинком, с электромагнитным механизмом фиксации лыжи с ботинком с электромагнитным клапаном гребешка;
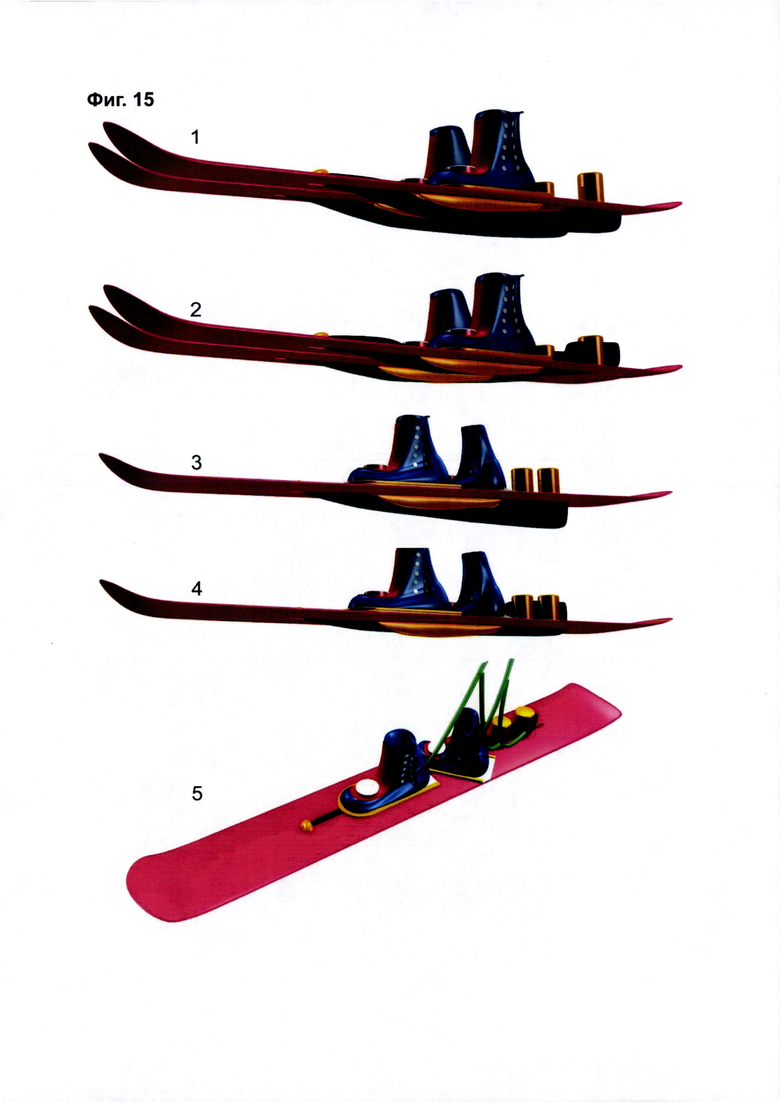
Фиг. 15 - общий вид лыж с ботинком, с выдвижным гребешком;
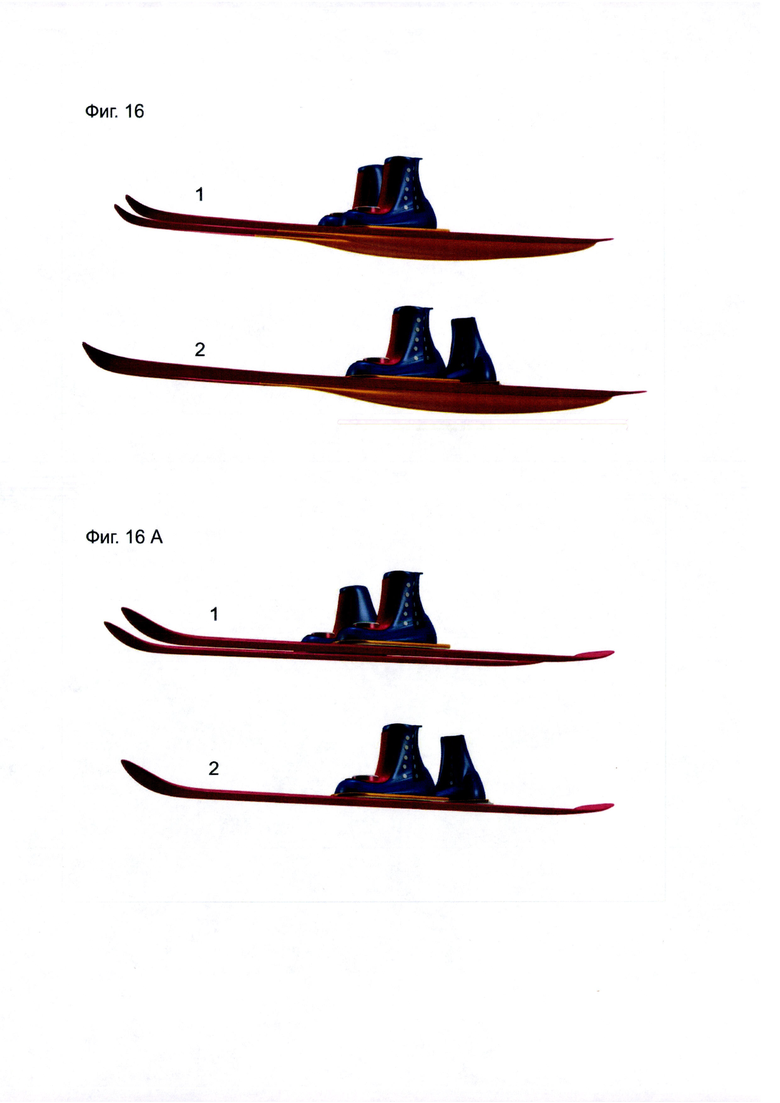
Фиг. 16 - лыжи и монолыжа с встроенным гребешком;
Фиг. 16 А - лыжи и монолыжа гладкие;
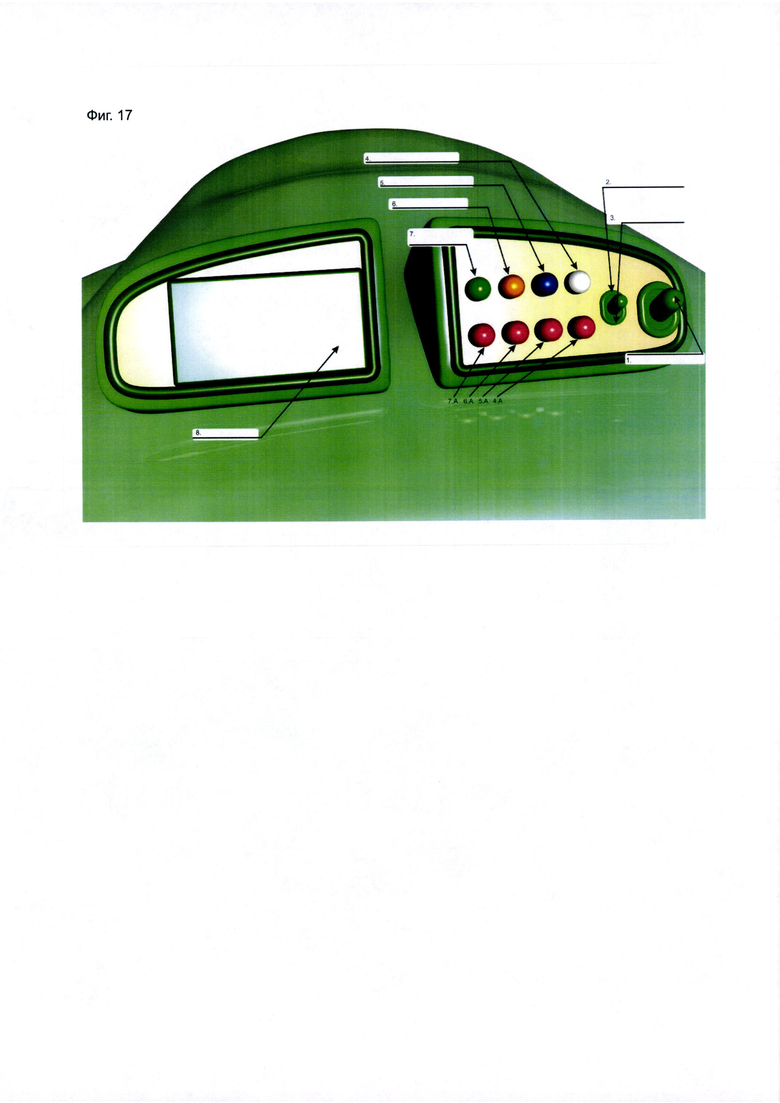
Фиг. 17 - панель приборов, дисплей, навигатор, кнопки управления в корпусе ТВЛ.
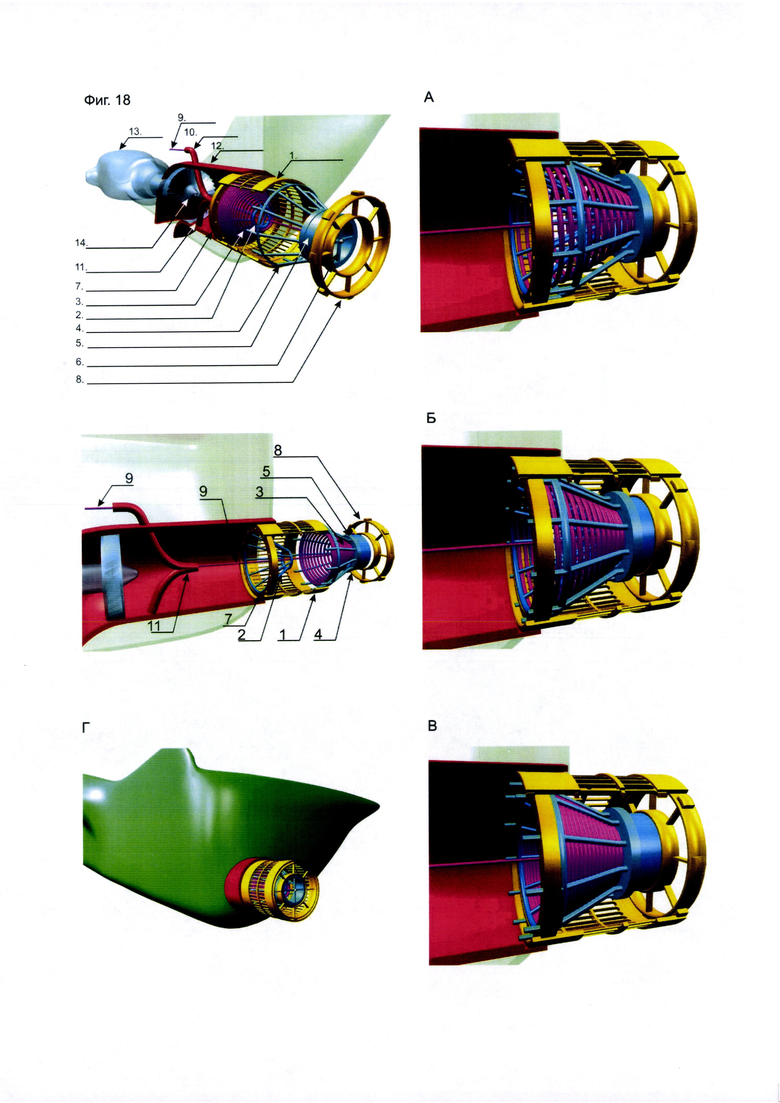
Фиг. 18 - рассекатель водометной струи.
Фиг. 19 - пояс лыжника.
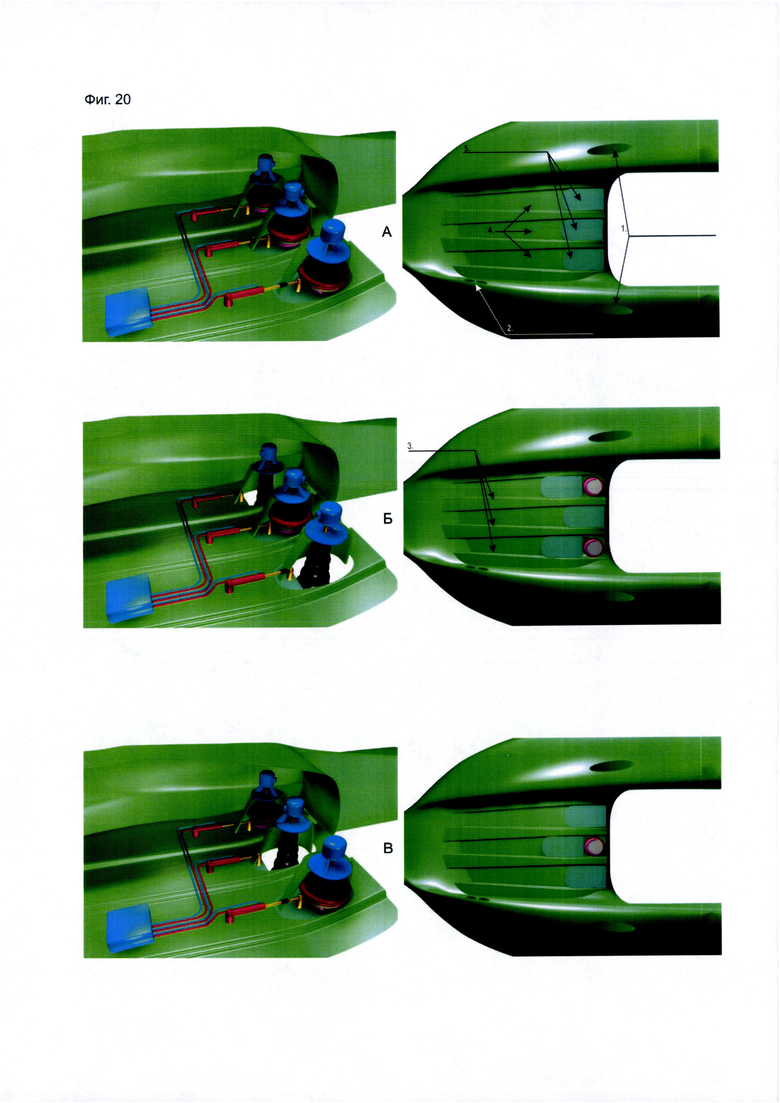
Фиг. 20 - вид ТВЛ снизу без лыж.
Тягач водный лыжный (далее - ТВЛ) Фиг. 10 содержит корпус (1) из стеклопластика, выполненный в нижней части арочного типа и с внутренними усиленными перегородками и ребрами жесткости (6), образующими отсеки (2) по всему корпусу. Нижняя внешняя арочная часть выполнена с направляющими пазами для лыж (Фиг. 20 А) (4), которые дополнительно придают жесткость корпусу. При этом, габариты корпуса ТВЛ выбраны таким образом, что они соответствуют физической возможности лыжника управлять и маневрировать ТВЛ при помощи лыж. Управление ТВЛ осуществляется лыжником, который задает направление движения с помощью лыж, в которые встроенны гребешковые направляющие (Фиг. 15) (1) (2) (3) (4), и с помощью механизма фиксации, подъема, опускания и ограниченного вращения лыж (далее МФПООВЛ) (Фиг. 13), имеющего кулак (2), корпус (1) и пружины (4), ограничивающего вращение лыж и осуществляющего их центровку, в тот момент, когда лыжи состыкованы с ТВЛ (Фиг. 1). Примерные габаритные размеры ТВЛ (Фиг. 9) могут быть следующие: длинна 2100±700 мм, ширина 1200±400 мм, высота 800±400 мм. Примерный вес находится в диапазоне от 180 кг до 360 кг. Габаритные размеры и вес ТВЛ могут быть выполнены в любых размерах в зависимости от возможностей современного оборудования, оснастки и автоматизации процесса, а также желания и возможностей человека. Корпус ТВЛ (Фиг. 10) (1), имеет конструктивные особенности, характеризующие расположение центра тяжести в зоне, максимально приближенной к креплению лыжника (Фиг. 1). Таким образом, упрощается регулировка центра тяжести, путем перемещения аккумуляторных батарей (Фиг. 10) (5) в аккумуляторных отсеках (2) для повышения маневренности и улучшения управляемости ТВЛ и безопасности.
Тягач водный лыжный (ТВЛ), также содержит аккумуляторные отсеки с аккумуляторными батареями (5), питающими электроэнергией все узлы и агрегаты ТВЛ. ТВЛ имеет силовую установку, представляющую собой два силовых электродвигателя (9) и две водометные турбины (10), бортовой компьютер (21), выполненный с возможностью управлять электродвигателями (9), три одинаковых МФПООВЛ (13, 14, 15), содержащие шаговые или ускоренные электро-серводвигатели (Фиг. 13) (10). При этом, два из МФПООВЛ, которые относятся к парным лыжам (Фиг. 10) (11), работают параллельно. Один из МФПООВЛ, который относится к монолыже (12), работает отдельно от предыдущих МФПООВЛ. При этом, упомянутые МФПООВЛ не могут включаться одновременно и для их включения предусмотрен трехступенчатый тумблер (Фиг. 17) и кнопки включения на корпусе ТВЛ. МФПООВЛ связанны с аккумуляторами (Фиг. 10) (5), лебедкой (22), держаком-ручкой (16) с телескопической направляющей (19) и фиксатором горизонтального положения телескопической направляющей (8). Крепление аккумуляторных батарей в отсеках осуществлено таким образом, чтобы менять положение аккумуляторных батарей (5), а также их количество. ТВЛ имеет возможность состыковки и расстыковки с лыжами через ботинок лыжника и с помощью МФПООВЛ лыж (13 и 15, 14). Привод ТВЛ осуществлен от аккумуляторных батарей (5), имеющих связь с бортовым компьютером (21) и с двумя силовыми электродвигателями (9), которые передают крутящий момент на две водометные турбины (10). Вместо электродвигателей могут применяться двигатели внутреннего сгорания, либо ТВЛ может иметь гибридный привод.
Телескопическая направляющая (Фиг. 11) установлена на корпусе ТВЛ и выполнена с возможность пропускать мягкую сцепку (7), намотанную на лебедку (Фиг. 10) (22) и имеет необходимую для использования длину, для соединения с держаком-ручкой (Фиг. 12) и последующего дистанцирования лыжника. При этом, в мягкую сцепку (Фиг. 11) (7) интегрирован электрический кабель, соединяющий кнопки управления с бортовым компьютером (Фиг. 10) (21), который в свою очередь соединен с силовыми электродвигателями (9), лебедкой (22) и МФПООВЛ (13, 14, 15). Телескопическая направляющая (19) способна раздвигаться при дистанцировании лыжника, а корпус ТВЛ ближе к задней части имеет точку опоры для мягкая сцепка в роспуске для предотвращения дисбаланса в управляемости ТВЛ (Фиг. 3, Фиг. 4).
Телескопическая направляющая устроена имеет внешнюю телескопическую направляющую (Фиг. 11) (1) с наружным плечиком (2) для соединительной муфты (9), соединительную муфту из дюралюминия, выполненную разрезной и соединяющуюся болтами, с гнездом для квадрата (14) для соединения со стыковочным квадратом держака-ручки (Фиг. 12) (11). Соединительная муфта имеет закрепленную в ней стальную шайбу (Фиг. 11) (10) для примагничивания держака-ручки (Фиг. 12). В месте соединения соединительной муфты с держаком-ручкой телескопическая направляющая на своем конце имеет клещеобразный вид (Фиг. 11) (9) для обхвата за плечики (2) внешней телескопической направляющей. Выдвижная телескопическая направляющая выполнена из дюралюминевой профильной трубы меньшего сечения (3) с плечиками для упора (4) во внутреннее плечико внешней телескопической направляющей (2 А). Выдвижная телескопическая направляющая (3) выдвигается при помощи пружины (8). Внутри телескопической направляющей предусмотрен чехол мягкой сцепки (6) для пропускания через него мягкой сцепки (7). В конце выдвижной телескопической направляющей находится конусообразный хвостик (5) из упругой резины (5 А) со вставленными в него кольцами (5 Б), выполненным обручеобразными из капролоптана для лучшего скольжения мягкой сцепки. На хвостик одевается пружина (5 В). Пружина устроена так, что ее пруток и диаметр постепенно идет на уменьшение диаметра. Хвостик с расширенной стороны выполнен с обжимным кольцом (5 Г), имеющим резьбу (5 Д) для крепления к внутренней телескопической направляющей. Устройство хвостика с пружиной позволяет сгибаться не у основания телескопической направляющей, а в конце резинового хвостика там, где тоньше, потом равномерно до угла 90 градусов. Резиновый хвостик предотвращает заломы в мягкой сцепки и встроенном в нее кабеле.
Противоположная сторона внешней телескопической направляющей выполнена с переходом в цилиндрическую часть(23), а цилиндрическая часть переходит в сферическую часть (20) и соединяется через шарнир (25) с внешней сферической частью (18), которая закреплена на стакане фланца (13) путем сварки. Между сферическими частями (18, 20) установлена проставка скольжения (19) из капролоптана. В конце цилиндрической части телескопической направляющей закреплен второй хвостик (5 Ж), имеющего такие же размеры и назначение как и у первого хвостика. Фланец (Фиг. 11) (16) крепится к фланцу на корпусе ТВЛ под чехлом (27) с помощью болтов (15). На фланец (16) установлен опорный стульчик (26), а на цилиндрическую часть (23) вмонтирован ограничительный упор (24) для ограничения угла наклона телескопической направляющей. В переходной части внешней телескопической направляющей предусмотрена цилиндрическая шейка (22) для защитного чехла (21), второй конец которого одевается на шейку (27). На соединительной муфте (9) имеется паз (11) для седла (12) (для разъяснения Фиг. 11 А) телескопических опор (17).
Телескопическая направляющая также имеет телескопические опоры (17) для поддержания телескопической направляющей на необходимой высоте относительно ТВЛ, защитный чехол (28) телескопических опор, защитный чехол телескопической направляющей (21), защищающий механизмы телескопической направляющей от попадания воды. На данном ТВЛ применяются складные винтовые телескопические опоры (17) с приводом от электродвигателя.
Подъем телескопических опор (Фиг. 11) (17) осуществляется путем нажатия на кнопку фиксатора держака-ручки с телескопической направляющей (Фиг. 12) (6) и происходит в пошаговом интервале. Вначале, расфиксируется телескопическая направляющая (Фиг. 10) (8), затем выдвигаются телескопические опоры (Фиг. 11) (17), поднимается телескопическая направляющая из горизонтального положения (Фиг. 11), происходит фиксация держака-ручки (Фиг. 12) с телескопической направляющей (Фиг. 11) и выдвижная телескопическая направляющая (3) входит во внешнюю телескопическую направляющую (1).
Держак-ручка (Фиг. 12) соединен с ТВЛ через телескопическую направляющую (Фиг. 11) при помощи мягкой сцепки (7) и имеет кнопки управления, которые представляют собой: кнопку блокировки ТВЛ, кнопку фиксации держака-ручки с телескопической направляющей, джойстик, кнопку (17) управления электромагнитом фиксации лыж к ТВЛ, две кнопки (18) управления оборотами электродвигателей и кнопку фиксации оборотов двигателей. Кнопка блокировки ТВЛ (Фиг. 12) (1) осуществляет блокировку ТВЛ и должна быть прижата ладонью левой руки лыжника перед началом движения на ТВЛ. При сбросе руки с кнопки блокировки ТВЛ в интервале от 7 до 20 секунд происходит блокировка ТВЛ. Кнопка фиксации держака-ручки с телескопической направляющей (6) используется только в момент стыковки и расстыковки лыжника с ТВЛ. Джойстик (2) наматывания и разматывания лебедки осуществляет управление лебедкой (Фиг. 10) (22) и используется после расстыковки ТВЛ для дистанцирования и возвращения лыжника на ТВЛ. Джойстик имеет тройную функцию (Фиг. 12) (2): при нажатии на джойстик влево происходит дистанцирование, а вправо возращение на ТВЛ. Этот же джойстик (2) управляет рассекателем водометной струи и преобразователем волнового вала (Фиг. 18А, 18Б, 18 В, 18Г). При нажатии на джойстик вниз пружина в сетке рассекателя (3) (Фиг. 18Б) сжимается и происходит рассечение водометной струи, а при нажатии на джойстик до упора вниз (Фиг. 12) (2), пружина (Фиг. 18В) (3) полностью сжимается в воронку и увеличивается давление, преобразуя водометную струю. В результате образуется увеличенный волновой вал, используемый лыжником для выполнения трюков. Кнопка управления электромагнитом фиксации лыж к ТВЛ (Фиг. 12) (3) используется в момент стыковки и расстыковки лыжника с ТВЛ. Кнопки управления оборотами электродвигателей (4) и (4 А) используется при наборе и сбросе оборотов двигателей при движении: в прямом направлении путем одинакового, равномерного нажатия на кнопки, а при маневре направо или налево путем поочередного нажатия на одну из кнопок. Кнопка фиксации оборотов двигателей (5) используется при стабильном движении и направлении для того, чтобы не держать постоянно зажатыми кнопки управления оборотами двигателя (4) и (4 А).
Мягкая сцепка (Фиг. 12) (7) подтягивает держак-ручку (Фиг. 12) посредством лебедки (Фиг. 10) (22), соединяя стыковочный квадрат (Фиг. 12) (11) держака-ручки с гнездом стыковочного квадрата (Фиг. 11) (14) через стальной диск для электромагнита (10). При подаче электронапряжения в электромагнит (Фиг. 12) (12) держак-ручка жестко фиксируется с телескопической направляющей.
В центре треугольного корпуса держака-ручки (Фиг. 12) находится гнездо штекера (9) для соединения питающего кабеля (Фиг. 19) (7) с соединительными штекерами (2), (5) и с поясом лыжника (1). Пояс лыжника (Фиг. 19) выполнен из эластичных резиноподобных материалов с магнитными застежками (3) и имеет встроенный сигнальный радиопередатчик (4) на случай нештатной ситуации, а также имеет сзади гнездо для штекера (6) со встроенным кабелем для соединения и подачи напряжения через ботинок лыжника (Фиг. 14) (9) в электромагнит ботинка лыжника (5), в электромагнит застежки ботинка (13) и к гребешковому лыжному электромагнитному клапану (7).
ТВЛ имеет панель приборов (Фиг. 17), на которой расположен дисплей (8) для определения скорости, датчики контроля приборов и навигационное оборудование, выполненное с возможностью заложения и исполнения маршрута в режиме беспилотного управления ТВЛ, и предстартовые кнопки управления. Предстартовые кнопки управления включают: главную кнопку подачи напряжения от аккумуляторных батарей (1), трехходовой тумблер, переключающий режимы работы - в положение вверх (2) для парных лыж, а для монолыжи в положение вниз (3), кнопку включения застежки ботинок электропуговицами (4), кнопку включения крепления ботинок к лыжам (5), кнопку включения регулировки балластом воды (6), кнопку включения подъема гребешка лыж (7), кнопку отключения балласта воды (6 А), кнопку отключения подъема гребешка (7 А), кнопку отключения крепления ботинок к лыже (5 А), кнопку отключения застежки ботинок (4 А).
Управление ТВЛ может осуществляться двумя способами.
Первый способ включает в себя дистанционное управление через радиопередатчик (Фиг. 12) (14), встроенный в держак-ручку, который передает сигналы от кнопок управления держака-ручки в радиопередатчик, установленный на ТВЛ и связанный с бортовым компьютером (Фиг. 10) (21). Второй способ включает в себя управление с помощью передачи сигналов от кнопок управления держака-ручки через кабель, встроенный в мягкую сцепку. При использовании первого и второго способов управления ТВЛ при отпускании кнопки нештатной ситуации (она же кнопка блокировки ТВЛ (Фиг. 12)) срабатывает автоматическая поисковая система. Бортовой компьютер фиксирует отпускание кнопки блокировки ТВЛ и подает сигнал на отключение кнопок управления электромагнитом крепления ботинок к лыжам (Фиг. 17) (5) и сигнал на отключение электромагнита застежки пуговиц ботинок (4) и электромагнита подъема гребешка лыж (7). Далее, в интервале времени через 7-20 секунд включается радиоуправляемая автоматическая система поиска лыжника. Автоматическая поисковая система лыжника включает автономное управление ТВЛ для сближения ТВЛ с лыжником, реагируя в ответ на радиосигнал, исходящий из датчика, встроенного в пояс лыжника Фиг. 19 (4).
Механизм фиксации, подъема, опускания и ограниченного вращения лыж выполнен с электромагнитом (Фиг. 13) (3) и служит для стыковки и расстыковки лыжника от ТВЛ (Фиг. 1, 3, 13) (16) (17), регулировки подъема и опускания лыжника с лыжами относительно нижней арочной части корпуса ТВЛ (Фиг. 7, Фиг. 8) в зависимости от веса лыжника в тот момент, когда лыжи состыкованы с ТВЛ. Например, при условном малом весе лыжника (около 40 кг) лыжи опускаются максимально вниз, примерно на 240±20 мм относительно нижней арочной части корпуса ТВЛ (Фиг. 8), потому что погружение в воду ТВЛ при малом весе будет минимальным. При условном максимальном весе лыжника (около 100 кг) лыжи поднимаются максимально вверх, примерно на 140±20 мм относительно нижней арочной части корпуса ТВЛ (Фиг. 7), потому что погружение в воду ТВЛ будет максимальным. Если не применять регулировку подъема и опускания лыж, то легкий лыжник не будет касаться лыжами воды, а тяжелый будет чрезмерно погружен в воду, и не сможет управлять лыжами, и нормально дистанцироваться от ТВЛ.
Первичную информацию об уровне погружения ТВЛ в воду выдают два отдельных вертикальных и два горизонтальных датчика уровнемера, когда лыжник с лыжами закреплен к ТВЛ. Далее, включают на держаке-ручке кнопку управления электромагнитом фиксации лыж к ТВЛ (Фиг. 12) (3) и подают сигнал регулятору подъема и опускания лыж (Фиг. 10) (24). Регулятор, взаимодействуя с компьютером, подает команду МФПООВЛ на подъем или опускание лыжи. При этом, датчики встроены в отдельные камеры в две задние емкости балласта (Фиг. 10) (3), а отдельные камеры сообщаются с забортной водой через сосуды и отверстия в днище ТВЛ (Фиг. 20) (2).
МФПООВЛ осуществляет свою работу оп команде компьютера в автоматическом режиме во временном пошаговом интервале и в следующем порядке. После включения кнопки электромагнита фиксации лыж (Фиг. 12) (3), открываются заслонки (Фиг. 20) (А) (Б), МФПООВЛ опускается на минимальный достаточный уровень для фиксации лыжного ботинка с ТВЛ, через встроенную в его носовую часть стальную пластину (15), лыжник выставляет поочередно лыжи к гнезду электромагнита и производит примагничивание стальной пластины ботинка с гнездом стальной пластины электромагнита. Датчики уровнемеры срабатывают и передают компьютеру информацию о весе лыжника. Компьютер (Фиг. 10) (21) взаимодействуя с регулятором подъема и опускания лыж (24), передает команду на подъем или опускание лыж в зависимости от веса лыжника (Фиг. 7, Фиг. 8). При выключении кнопки электромагнита фиксации лыж с корпусом ТВЛ (Фиг. 12) (3) происходит размагничивание и лыжник убирает ботинки с лыжами из гнезда стальной пластины электромагнита (Фиг. 13) (13), после этого в интервале через 5-10 секунд происходит подъем МФПООВЛ и закрываются заслонки закрываются (Фиг. 20) (А) для исключения задевания оголовка лыж за МФПООВЛ.
Дополнительно для стабилизации центра тяжести ТВЛ и регулировку частичного погружения лыж с лыжником в воду на заданный уровень осуществляет балластная система. Балластная система регулируется забортной водой путем ее распределения в четырех емкостях балласта (Фиг. 10) (3) и их отсеках по периметру ТВЛ, а при необходимости забор и сброс воды осуществляется через отверстия в корпусе ТВЛ (Фиг. 20 А) (2). Перекачка воды осуществляется насосами (4) через сообщающиеся сосуды, а регулировка уровня воды осуществляется с помощью регулировочных, перепускных, отсекающих и сбрасывающих клапанов (4) на основе сигналов от горизонтальных и вертикальных датчиков уровнемеров, встроенных отдельными камерами в емкостях балласта (3). Регулировка частичного погружения производится компьютером автоматически, в момент, когда лыжник в предстартовом положении включает систему балластной регулировки путем нажатия на стационарную кнопку ТВЛ (Фиг. 17) (6). Совместно взаимодействуя МФПООВЛ и система регулировки балласта воды производят точную регулировку центра тяжести ТВЛ (при разной весовой категории лыжника) и осуществляют заданное погружение лыж с лыжником в воду для нормальной езды на лыжах. Система балластной регулировки позволяет сгладить все колебания путем своеврменной регулировки центра тяжести, так как при дистанцировании лыжника от ТВЛ в результате натяжения мягкой сцепки положение центра тяжести отличается от положения центра тяжести при возвращении лыжника на ТВЛ, или от положения центра тяжести при котором лыжник сидит на приставном сидении в режиме отдыха-прогулки (Фиг. 4 А).
МФПООВЛ (Фиг. 13) также выполнен с возможностью ограничивать вращение, колебание и разъезд лыж, и выполнен с возможностью поддержки и центровки лыж для повышения безопасности управляемости, когда лыжник состыкован с ТВЛ и находится во время движения. МФПООВЛ (Фиг. 13) содержит корпус кулака с ограничителем вращения (1), кулак (2), электромагнит для крепления ботинка с лыжей (3), стабилизационно-центрирующую пружину (4), выполненную конусообразно для того чтобы прутки пружины при креплении нижней площадки с корпусом кулака входили друг в друга, фиксатор пружины нижнего отверстия (5), фиксатор пружины верхнего отверстия (5 А), прижимную площадку (6), направляющие шлицы (7), болты крепления (8), направляющие опорные плечики (9) для стальной пластины носа ботинка лыж (Фиг. 14) (15), гнездо стальной пластины носа ботинка лыж (Фиг. 13) (13), червячная пара (14), шаговый электродвигатель (10), опорную площадку для крепления к корпусу ТВЛ (11), водозащитный кожух (12) и защитные проставки (15). Фиксация лыж с ТВЛ происходит путем соединения металлической пластины (Фиг. 14) (15), расположенной в верхней носовой части лыжного ботинка, установленного на лыже, с гнездом стальной пластины электромагнита механизма фиксации лыж (Фиг. 13) (3), (Фиг. 10) (13) (14) (15).
На ТВЛ могут применяться пневматические механизмы подъема и опускания лыж (Фиг. 13 А), заменяющие шаговые электродвигатели (Фиг. 13) (10) и червячные пары (14). При этом, механизм фиксации ограниченного вращения лыж остается прежним. Крепление пневматического механизма к корпусу МФПООВЛ осуществляется посредством площадки (4), имеющей на шлицы и вал (5). Пневматический механизм подъема и опускания лыж выполнен цилиндрическим (Фиг. 13 А) и управляется регулятором подъема и опускания лыж (Фиг. 10) (24), (Фиг. 13 А) (3). Пневматический механизм содержит диафрагмы, регулировочные клапана, перепускные клапана, отсекающие клапана, сбрасывающие клапана, сообщающиеся воздухопроводы (2), электропитание (8) и кабель автоматики (9). Первичную команду задают те же кнопки управления, встроенные в держак-ручку (Фиг. 12), через компьютер (Фиг. 10) (21). Датчики уровнемеры, встроенные отдельными камерами в емкостях балласта, выдают компьютеру уровень погружения ТВЛ в воду в зависимости от веса лыжника. Компьютер передает информацию регулировочному устройству (Фиг. 13 А) (3), регулировочное устройство создает заданное давление в рабочем цилиндре (1), и лыжи с лыжником погружается на нужный уровень воды. Пневматический механизм подъема и опускания лыжника взаимодействует через компьютер (Фиг. 10) (20) и нагрузочное регулировочное устройство (24 А) с балластной системой ТВЛ.
Лыжи выполнены из пластика, а оголовок лыж выполнен с нанесением резиноподобных эластичных материалов для исключения жесткого соприкосновения с корпусом ТВЛ.
Лыжи и монолыжа(Фиг. 14) содержат корпус лыжи (1), оголовок лыжи (2), направляющую ботинка для крепления ботинка к лыже (3), выдвижной гребешок (6), направляющие гребешка (18), шарнир (17) и электромагнитный клапан гребешка (7). В каждой лыже (Фиг. 15) (1), (2) установлены по одному электромагнитному клапану гребешка (6), (7), а в монолыже (3), (4) установлены два электромагнитных клапана гребешка (8) (9). Монолыжа имеет аналогичное крепление ботинка, как у парных лыж. При этом, в монолыже один ботинок крепится вдоль монолыжи, а второй - под углом, относительно первого (5).
Лыжи (Фиг. 15) (1), (2) и монолыжа (3), (4) оборудованы выдвижными гребешками (Фиг. 14) (6), позволяющими управлять и маневрировать ТВЛ в режиме стыковки лыжника с ТВЛ. Направляющие гребешка (18) установлены в корпусе лыж, удерживают выдвижной гребешок (6) от колебаний и перекрывают отверстие (6 А) в выдвижном гребешке, когда выдвижной гребешок находится в опущенном состоянии. Отверстие (6А) выполняется в гребешке для исключения упора гребешка в подошву ботинка, когда выдвижной гребешок находится в сложенном сотоянии.
Устройство ботинок (Фиг. 14) (12) имеет конструктивную особенность, представляющую собой нос ботинка, имеющий определенную жесткость, позволяющую ботинку выдерживать нагрузки при его подвесе. В верхней носовой части встроенная стальная пластина (15), которая предназначена для соединения с электромагнитом механизма фиксации лыж (Фиг. 13). Монолыжа (Фиг. 10) (14) соединяется с ТВЛ путем примагничивания ботинка с лыжей к электромагниту фиксации лыж в средней части корпуса ТВЛ, а парные лыжи путем примагничивания к электромагнитам фиксации лыж (14) (15) в крайних частях корпуса ТВЛ. В ботинках также установлена защитная пластина ног с направляющей для стыковки (Фиг. 14) (14), которая служит для защиты ног и направления ботинка к стыковке с электромагнитом в корпусе ТВЛ. При этом, в корпусе ТВЛ выполнены специальные углубления для направления ботинка во время стыковки (Фиг. 9) (1) и представляют собой ориентир для лыжника, выполняющего стыковку с корпусом ТВЛ.
Крепление ботинок к лыжам и ботинки имеют следующее конструктивное выполнение. К ботинку (Фиг. 14) подводится электропитание, идущее по кабелю от пояса лыжника (Фиг. 19) (6) через разъемный штекер (Фиг. 14) (9) и питающее электромагнит (5), встроенный в подошву ботинка. В направляющей для крепления ботинок к лыже (3) закреплена стальная пластина (4). При подаче напряжения в электромагнит (5) стальная пластина (4) соединяется с электромагнитом ботинка (5), фиксируя ботинок с лыжей. Застежка ботинок происходит путем включения кнопки (Фиг. 17) (4), расположенной на корпусе ТВЛ, после чего подается электропитание посредством кабеля через катушку электро-напряжения на электромагнитные застежки ботинок (13), рассчитанные на усилие достаточное для эксплуатации у лыж.
Электромагнит крепления ботинок к лыже, электромагнитные застежки ботинок и электромагнитный клапан гребешка подключаются посредством кабеля к корпусу ТВЛ (Фиг. 17) (4) (5) (7) и работают под управлением компьютера (Фиг. 10 (21) через нагрузочное промежуточное регулировочное устройство (24 А). Электромагнит крепления ботинок к лыже, электромагнитные застежки ботинок и электромагнитный клапан гребешка имеют связь с кнопкой блокировки ТВЛ (Фиг. 12) (1), это позволяет в момент наступления нештатной ситуации, когда кнопка блокировки ТВЛ отпущена, производить обесточивание и отключить электромагнитный клапан гребешка, электромагнит крепления ботинок к лыже и электромагнитные застежки ботинок, разъединив их лыжник легко освобождает ноги от ботинок. Штекеры крепления кабеля электроэнергии к ботинкам (9), электромагниту гребешка (7) и поясу (Фиг. 19) (2) (5) (6) лыжника рассчитаны на усилие, позволяющее при падении лыжника в первую очередь разъединить штекер в передней части пояса (5) лыжника, а кабели и их соединения выполнены с запасом прочности, позволяющим удержать лыжи и ботинки, закрепленными к лыжнику.
ТВЛ может быть выполнен в варианте с лыжами (Фиг. 16) (1) и монолыжей (2), которые оборудованы встроенным и не подвижным гребешком. Лыжи со встроенным и не подвижным гребешком отличаются от лыж с выдвижным гребешком тем, что лыжи не имеют электромагнитных клапанов для подъема и опускания гребешка и их оснастки. Другим отличием лыж со встроенным и не подвижным гребешком является более сложное маневрирование при дистанцировании лыжника от ТВЛ на мягкой сцепки.
ТВЛ также может быть выполнен в варианте с лыжами (Фиг. 16 А) (1) и монолыжей (2), которые имеют гладкое покрытие. Отличаются указанные лыжи от лыж с гребешком тем, что не имеют электромагнитных клапанов для подъема и опускания гребешка и их оснастки. Другим отличием лыж с гладким покрытием является более сложное маневрирование при управлении ТВЛ.
ТВЛ в своей конструкции содержит рассекатель-преобразователь водометной струи (Фиг. 18), который крепится на выходе струи из водометной трубы и состоит из сетчатого кожуха (1), связывающего опорный обруч (8)с одной стороны. С другой стороны сетчатого кожуха закреплен фланец (7), на который опирается внутренняя корзина (2) и внешняя корзина с направляющими прутками во фланце (4). С противоположной стороны внешней корзины находится фланец с шейкой (5), имеющий крестообразный подвес (6) для крепления троса регулятора (9). Между двумя корзинами расположена конусообразная пружина рассекателя (3), которая упирается с одной стороны во фланец (7), а с другой стороны в торец фланца с шейкой (5). Трос регулятора (9) соединен с крестообразным подвесом троса (6) фланца с шейкой (5). В случае, когда трос не натянут регулятором троса (Фиг. 18 А) эффект от рассекателя будет незначительным. При натяжении троса регулятором троса (Фиг. 10) (23) до среднего положения сжатия (Фиг. 18 Б) пружины рассекателя будет наблюдаться эффект рассечения водометной струи с отсутствием волнового вала, но с потерей мощности ТВЛ, которую необходимо будет компенсировать оборотами двигателя. При натяжении троса до положения полного сжатия пружины рассекателя (Фиг. 18 В), преобразуя пружину в воронку, поток водометной струи при большом давлении будет увеличивать волновой вал, что позволяет опытному лыжнику выполнять сложные трюки. Сжатие пружины рассекателя (Фиг. 18) (3) регулирует регулятор водометной струи (Фиг. 10) (23) получая команды от компьютера (21), на который поступает сигнал от джойстика (Фиг. 12) (2).
Тягач водный лыжный работает следующим образом.
Перед началом движения на ТВЛ, имеющим электромагнитные устройства, раскладывают оснастку, спускают ТВЛ на воду достаточной глубины, одевают пояс лыжника (Фиг. 19), соединяют электро-кабели ботинок, лыж (Фиг. 14) (11) и электромагнита клапана гребешка (10), с поясом лыжника (Фиг. 19) (6), и соединяют кабель держака-ручки с поясом (7). Включают на корпусе ТВЛ в панели приборов кнопку включения ТВЛ (Фиг. 17) (1), далее переключают режим в зависимости от выбора типа лыж, одевают лыжные ботинки, направляют застежки ботинок, включают кнопку застежки ботинок (4). Укладывают лыжи под арку ТВЛ, выставляют ботинки в направляющие ботинок в лыжах (Фиг. 14) (3) на металлическую пластину (4), включают на панели приборов кнопку крепления ботинок к лыже (Фиг. 17) (5), производя примагничивание.
Управление ТВЛ осуществляется посредством держака-ручки (Фиг. 12). Ладонью правой руки прижимают кнопку блокировки ТВЛ (1), работающую по обратному принципу, при нажатии на которую производится разблокировка управления ТВЛ, а при отпускании - блокировка. Включают кнопку электромагнита фиксации лыж с корпусом ТВЛ (3) и соединяют поочередно лыжные ботинки с электромагнитами. Далее, опираясь на уровень погружения ТВЛ в воду, срабатывают датчики-уровнемеры, передающие компьютеру информацию о весе лыжника. Компьютер в свою очередь передает информацию регулятору подъема и опускания лыж (Фиг. 10) (24), которые подает сигнал шаговым или электро-серводвигателем (Фиг. 13) (10) на опускание лыж (Фиг. 10) (13) (15) в воду. В завершении, нажимают кнопку включения балластной системы на панели приборов корпуса ТВЛ (Фиг. 17), регулирующую центр тяжести ТВЛ.
Готовясь к старту, включают плавным нажатием кнопки оборотов двигателя (Фиг. 12) и в зависимости от направления движения регулируют обороты двигателя. Набрав постоянную скорость, маневрируют ТВЛ, управляя им ногами и фигурой при помощи лыж. На заданном маршруте фиксируют обороты двигателя кнопкой (Фиг. 12) (5). При достижении скорости примерно в 30 - 35 км/ч дистанцируются от ТВЛ, предварительно нажав кнопку подъема гребешка (Фиг. 19) (7) на корпусе ТВЛ в панели приборов. Опираясь на держак-ручку, толкают лыжи вперед и одновременно нажимают кнопку на держаке-ручке (Фиг. 12) (3) электромагнита фиксации лыж с корпусом ТВЛ, в результате чего происходит размагничивание. Далее, убирают лыжи с ботинками из гнезда стальной пластины (Фиг. 13) (13), а механизм подъема и опускания лыж поднимается вверх и закрывается заслонками (Фиг. 20) (А).
На держаке-ручке нажимают кнопку фиксации держака-ручки с телескопической направляющей (Фиг. 12) (6), что приводит к складыванию телескопических опор (Фиг. 11) (17), опусканию телескопической направляющей (Фиг. 1, Фиг. 3) до заданного наклона и фиксации (Фиг. 10 (8), Фиг. 11 (Б)), и размагничиванию держака-ручки с телескопической направляющей.
Пальцем руки управляют джойстиком держака-ручки (2), передвигая его в направлении влево для выдвижения внутренней телескопической направляющей (Фиг. 11 В) и медленного дистанцирования от ТВЛ. В этом положении джойстик плавно прижимают по оси вниз (Фиг. 12) (2) до середины рабочего положения при котором водометные турбины способствуют образованию на воде сзади ТВЛ сравнительно штилевой глади. Продолжают перемещать джойстик в направлении влево для продолжения дальнейшего дистанцирования лыжника от ТВЛ. В зависимости от надобности водной глади, поднимают джойстик вверх для образования волны от турбин. При необходимости выполнения трюков, добавляют обороты двигателей, а джойстик прижимают по вертикале в положение до упора вниз, в котором срабатывает рассекатель водометной струи (Фиг. 18 В) и образуется волновой вал.
При возвращении на ТВЛ прижимают джойстик пальцем руки (Фиг. 12) (2) до положения средней части относительного рабочего хода, в котором образуется сравнительная водная гладь, и этим же пальцем поворачивают джойстик вправо для сближения с ТВЛ. Сближаются с ТВЛ и заводят лыжи под арочную часть корпуса ТВЛ. Включают кнопку электромагнита фиксации держака-ручки с телескопической направляющей (Фиг. 12) (6), во время ее нажатия одновременно включаются телескопические направляющие в пошаговом интервале, расфиксируется телескопическая направляющая (Фиг. 10) (8), выдвигаются телескопические опоры (Фиг. 11) (17), телескопическая направляющая поднимается из горизонтального положения (Фиг. 11), происходит фиксация держака-ручки (Фиг. 12) с телескопической направляющей, а выдвижная телескопическая направляющая (3) входит во внешнюю телескопическую направляющую (1). Нажимают кнопку фиксации электромагнита лыж с корпусом ТВЛ (3) и одновременно с этим открываются заслонки (Фиг. 20Б), опускается механизм подъема и опускания лыж (Фиг. 13, Фиг 13А, Фиг. 10) (13) (15). Ориентируясь на углубления в корпусе ТВЛ для направления ботинок (Фиг. 9) (1) вставляют стальную пластину ботинок (Фиг. 14) (15) в гнездо стальной пластины. Производят примагничивание ботинок с лыжей к электромагниту МФПООВЛ. Нажимают кнопку опускания гребешка (Фиг. 17) (7) для маневрирования ТВЛ при помощи лыж. Отключают кнопку фиксации оборотов двигателей (Фиг. 12) (5) для изменения оборотов двигателей в ручном режиме, применяя кнопки оборотов двигателей (4, 4А).
В режиме отдыха лыжник может использовать сиденье, зафиксировав его на корпусе ТВЛ.
Управление монолыжей с выдвижным гребешком осуществляется аналогично управлению парными лыжами за исключением того, что перед стартом на корпусе ТВЛ в панели приборов кнопкой выбирают режим «монолыжа». Управление лыжами со встроенным в корпусе гребешком аналогично управлению лыжами с выдвижным гребешком, за исключением того, что при их применении не пользуются кнопкой в панели приборов ТВЛ подъема и опускания гребешка. Управление монолыжей со встроенным гребешком аналогично управлению монолыжей с выдвижным гребешком. Управление водными лыжами с гладким покрытием аналогично управлению лыжами со встроенным гребешком, за исключением того, что в панели приборов не включается кнопка подъема и опускания гребешка. Управление монолыжей с гладким покрытием аналогично управлению монолыже со встроенным гребешком.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тягач водный лыжный "Дельфин" с механической сцепкой лыж, монолыж и доски вейкборда | 2020 |
|
RU2748095C1 |
| Буксировочная система беспилотного летательного аппарата (варианты) | 2022 |
|
RU2778735C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ): ЛЫЖА, ЛЫЖЕРОЛЛЕРЫ, ШАРНИРНОЕ ЛЫЖНОЕ КРЕПЛЕНИЕ, ЛЫЖНЫЕ БОТИНКИ И СПОСОБЫ ХОДА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2010 |
|
RU2414275C1 |
| ЛЫЖНОЕ КРЕПЛЕНИЕ И БОТИНОК | 1993 |
|
RU2067478C1 |
| Лыжное крепление | 1989 |
|
SU1703147A1 |
| КРЕПЛЕНИЕ ДЛЯ БЕГОВЫХ ЛЫЖ | 2016 |
|
RU2683768C2 |
| ЛЫЖНОЕ КРЕПЛЕНИЕ | 2012 |
|
RU2603250C2 |
| ЛЫЖА И КОРПУС ЛЫЖНОГО КРЕПЛЕНИЯ | 2010 |
|
RU2541302C2 |
| Лыжное крепление "карпаты | 1978 |
|
SU806047A1 |
| ЛЫЖНОЕ КРЕПЛЕНИЕ | 2009 |
|
RU2525476C2 |

Изобретение относится к водному транспорту. Тягач водный лыжный содержит корпус, выполненный с возможностью регулировки центра тяжести путем перемещения аккумуляторных батарей в аккумуляторных отсеках и/или с помощью балластной системы. Тягач водный лыжный также содержит силовую установку, представляющую собой электродвигатели и водометные турбины, лебедку, механизм фиксации лыж и/или монолыжи, бортовой компьютер, телескопическую направляющую с держаком-ручкой, имеющим кнопки управления для передачи сигналов бортовому компьютеру, фиксатор для телескопической направляющей и лыжи и/или монолыжу, выполненные с возможностью стыковки и расстыковки с ТВЛ. Телескопическая направляющая соединена с держаком-ручкой при помощи мягкой сцепки, намотанной на лебедку, и имеет телескопические опоры. Держак-ручка содержит электромагнитный фиксатор для соединения с телескопической направляющей. Достигается повышение маневренности и управляемости тягача водного лыжного. 22 з.п. ф-лы, 25 ил.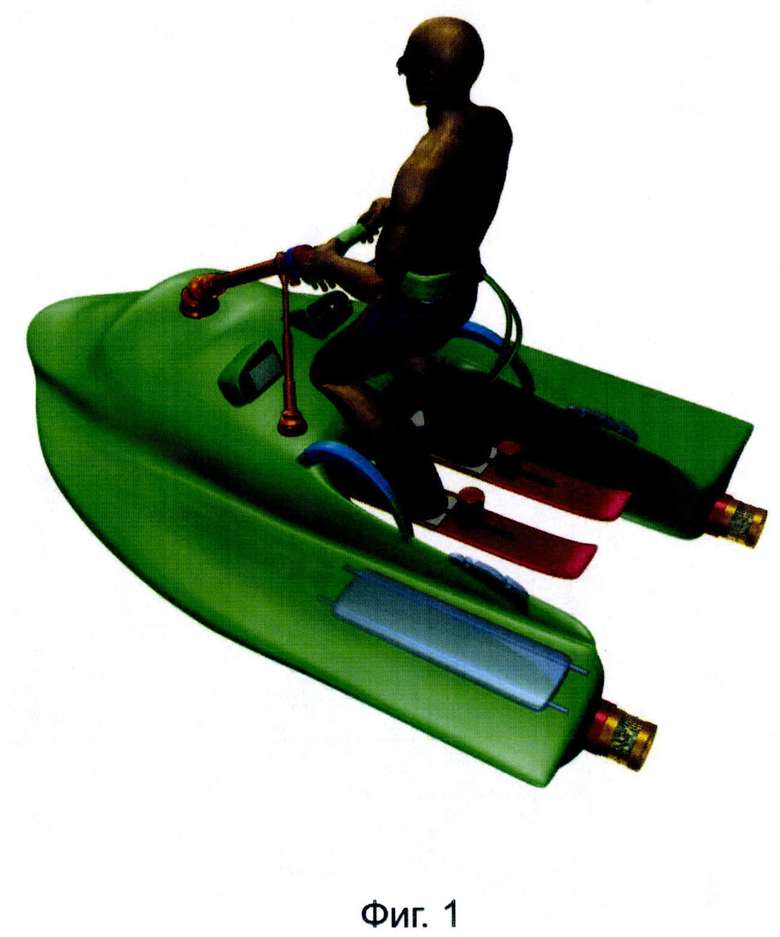
1. Тягач водный лыжный (ТВЛ), содержащий корпус, силовую установку, аккумуляторные отсеки, держак-ручку, содержащий кнопки управления в нем и соединенный с ТВЛ посредством мягкой сцепки, отличающийся тем, что корпус ТВЛ имеет возможность регулировки центра тяжести путем перемещения аккумуляторных батарей в аккумуляторных отсеках и/или с помощью балластной системы, а силовая установка ТВЛ содержит электродвигатели и водометные турбины, причем ТВЛ дополнительно содержит лыжи и/или монолыжу, лебедку и бортовой компьютер, выполненный с возможностью управления ТВЛ, ТВЛ также содержит телескопическую направляющую, раздвигающуюся при дистанцировании лыжника, имеющую жесткую точку опоры ближе к задней части корпуса ТВЛ для предотвращения дисбаланса в управляемости и выполненную с возможностью пропускать мягкую сцепку, намотанную на лебедку для соединения держака-ручки с ТВЛ, телескопическая направляющая дополнительно содержит фиксатор горизонтального положения и телескопические опоры, при этом кнопки управления держака-ручки выполнены с возможностью передачи сигналов бортовому компьютеру, а лыжи и/или монолыжа имеют возможность стыковки и расстыковки с ТВЛ посредством механизма фиксации лыж и/или монолыжи.
2. Тягач водный лыжный по п.1, отличающийся тем, что имеет три одинаковых механизма фиксации, подъема, опускания и ограниченного вращения лыж (МФПООВЛ), содержащих шаговые или ускоренные электросерводвигатели либо пневматический привод, опорную площадку для крепления к корпусу ТВЛ, корпус кулака и кулак в нем, выполненый с возможностью ограниченного вращения, электромагнит для соединения с ботинком, стабилизационно-центрирующую пружину, помогающую лыжнику держать лыжи в среднем положении, прижимную площадку и упор для ботинка лыжного.
3. Тягач водный лыжный по п.1, отличающийся тем, что имеет лыжи и/или монолыжу, у которых корпус выполнен из пластика, а оголовок лыж изготавливается с нанесением резиновых эластичных материалов.
4. Тягач водный лыжный по п.3, отличающийся тем, что имеет лыжи и/или монолыжу, у которых гребешковые направляющие выполнены складывающимися посредством подачи напряжения от ТВЛ в электромагнитный клапан, расположенный в задней части лыж.
5. Тягач водный лыжный по п.3, отличающийся тем, что имеет лыжи и/или монолыжу с направляющим гребешком, встроенным в корпус лыжи.
6. Тягач водный лыжный по п.3, отличающийся тем, что имеет гладкие водные лыжи и/или монолыжу.
7. Тягач водный лыжный по п.1, отличающийся тем, что имеет ботинки, крепление для ботинка с лыжей, причем ботинок снабжен защитной пластиной ног с направляющей для стыковки и металлической пластиной, расположенной в верхней носовой части ботинка, для соединения с электромагнитом МФПООВЛ, встроенный в подошву ботинка электромагнит и электромагнитные застежки ботинка, а в крепление лыж к ботинку встроена металлическая пластина с направляющей для крепления ботинка к лыже.
8. Тягач водный лыжный по п.1, отличающийся тем, что имеет кнопки управления, встроенные в держак-ручку и подающие команду компьютеру через мягкую сцепку со встроенным в нее кабелем либо дистанционно посредством радиоуправления, причем кнопки управления представляют собой кнопку блокировки ТВЛ, кнопку фиксации держака-ручки с телескопической направляющей, параллельно включающую телескопические опоры, джойстик наматывания и разматывания мягкой сцепки лебедкой, кнопки управления оборотами тяговых электродвигателей и кнопку фиксации оборотов двигателей.
9. Тягач водный лыжный по п.8, отличающийся тем, что имеет держак-ручку, содержащий электромагнитный фиксатор, жестко соединяющий телескопическую направляющую с держаком-ручкой в режиме стыковки с ТВЛ.
10. Тягач водный лыжный по п.1, отличающийся тем, что имеет панель приборов, где расположены дисплей для определения скорости, приборы работы датчиков, определяющие работу оборудования ТВЛ и навигационное оборудование, выполненное с возможностью заложения и исполнения маршрута в режиме беспилотного управления, и кнопки управления, расположенные в корпусе ТВЛ, представляющие собой главную кнопку подачи напряжения от аккумуляторных батарей, трехходовой тумблер, кнопку застежки ботинок, кнопку крепления ботинок к лыжам, кнопку регулировки балластом воды, кнопку подъема гребешка лыж и кнопки отключения: балласта воды, подъема гребешка, крепления ботинок к лыже, кнопки застежки ботинок.
11. Тягач водный лыжный по п.1, отличающийся тем, что имеет телескопическую направляющую с возможностью раздвигаться и менять угол наклона в момент дистанцирования лыжника, соединяться с держаком-ручкой путем применения электромагнита, пропускать через себя мягкую сцепку и иметь жесткую точку опоры ближе к задней части корпуса ТВЛ для предотвращения дисбаланса в управляемости.
12. Тягач водный лыжный по п.11, отличающийся тем, что в телескопической направляющей с двух сторон применяется конусообразный резиновый хвостик со вставленными внутри кольцами скольжения, причем сверху хвостик обжимается конусообразной пружиной, имеющей уменьшение диаметра, а металлический пруток пружины к сужению конуса также имеет уменьшение диаметра, при этом внутри хвостика проходит мягкая сцепка со встроенным кабелем.
13. Тягач водный лыжный по п.1, отличающийся тем, что имеет лебедку, при помощи которой лыжник дистанцируется на необходимое расстояние, содержащую мягкую сцепку, в которую интегрирован электрический или оптический кабель для передачи сигналов управления от кнопок держака-ручки в бортовой компьютер ТВЛ.
14. Тягач водный лыжный по п.1, отличающийся тем, что оснащен поясом лыжника, выполненным из эластичных резиноподобных материалов с магнитными застежками и имеющим встроенный сигнальный радиопередатчик для обнаружения лыжника на случай нештатной ситуации, при этом пояс также содержит встроенный в задней части кабель с розеткой и штекером для подачи напряжения к электромагниту ботинка лыжника, электромагниту застежек ботинка и электромагнитному клапану гребешка лыж.
15. Тягач водный лыжный по п.1, отличающийся тем, что имеет корпус, у которого ориентировочные габаритные размеры находятся в следующих диапазонах: длинна 2100±700 мм, ширина 1200±400 мм, высота 800±400 мм, примерный вес в диапазоне от 180 до 360 кг.
16. Тягач водный лыжный по п.15, отличающийся тем, что имеет корпус, выполненный из стеклопластика с внутренними усиленными перегородками и ребрами жесткости арочного типа, при этом расстояние между нижней арочной частью ТВЛ и поверхностью воды с учетом водоизмещения ТВЛ позволяет лыжам проходить под арочной частью корпуса ТВЛ.
17. Тягач водный лыжный по п.1, отличающийся тем, что на ТВЛ применяется воздушный компрессор, а механизм подъема и опускания лыж выполнен пневматическим.
18. Тягач водный лыжный по п.17, отличающийся тем, что на ТВЛ применяются пневматические заслонки для защиты механизма подъема и опускания лыж, расположенные в карманах на днище ТВЛ для исключения попадания в карман оголовка лыжи.
19. Тягач водный лыжный по п.1, отличающийся тем, что на ТВЛ применяется рассекатель-преобразователь водометной струи, который рассекает водную струю, исходящую из водометных турбин для образования волнового вала.
20. Тягач водный лыжный по п.19, отличающийся тем, что водометные турбины могут менять угол наклона по горизонтали и по вертикали.
21. Тягач водный лыжный по п.1, отличающийся тем, что содержит сиденье для лыжника.
22. Тягач водный лыжный по п.1, отличающийся тем, что содержит два или более мест для сидений, одно из которых расположено по центру.
23. Тягач водный лыжный по п.1, отличающийся тем, что на случай нештатной ситуации предусмотрена радиоуправляемая автоматическая система поиска лыжника, управляемая компьютером, срабатывающая после сбрасывания лыжником кнопки блокировки ТВЛ, расположенной на держаке-ручке, и осуществляющая поиск лыжника по сигналам датчика, встроенного в пояс лыжника.
| AU 7185874 A, 05.02.1976 | |||
| US 10179628 B2, 15.01.2019 | |||
| Аспирирующий эндоскоп | 1949 |
|
SU85883A2 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ЛЫЖНИКА | 2013 |
|
RU2520071C1 |

