Изобретение относится к области ракетно-космической техники и летательных аппаратов легче воздуха. Оно может быть использовано для запуска космических аппаратов (КА) с применением доработанных конверсионных баллистических твердотопливных ракет в доработанных транспортно-пусковых контейнерах (ТПК).
Ближайшим аналогом изобретения является аэростатный ракетно-космический комплекс (АРКК), описание которого с соответствующими отличительными признаками приведено в патенте РФ №2682893, кл. B64G 1/00, В64В 1/00, 2019 г. [1]. Общим для технических решений (существенных признаков изобретения), описанных в [1] и настоящего изобретения является состав АРКК включающий в себя: дирижабль, ракету космического назначения (РКН), ТПК, наземную стартовую площадку с опорно-удерживающим устройством, транспортно-установочный агрегат. При этом дирижабль выполнен в виде летательного аппарата легче воздуха дискообразной тороидальной формы с жесткой разборной на две идентичные части конструкции, на плоскостях, разделяющих дирижабль на две половины, установлены управляемые стыковочные механизмы для соединения частей дирижабля в единую конструкцию и соединения электрических, гидравлических и газовых разъемов, а внутри тороидального пространства дирижабля имеются опорные пояса с автоматическими узлами крепления ТПК к силовому каркасу дирижабля и автоматическое стыковочное устройство для стыковки коммуникаций дирижабля с коммуникациями ТПК. В составе дирижабля, для создания регулируемой аэростатической подъемной силы, имеются двигатели с винтами вертикальной и горизонтальной тяги, позволяющими, в том числе, осуществлять маневр увода дирижабля с траектории полета РКН, а также оборудование, предназначенное для поддержания во внутреннем объеме ТПК заданного тепло-влажностного режима во время подъема в атмосфере к точке старта, проведения предстартовых проверок РКН на дирижабле непосредственно перед пуском, приемо-передачи телеметрической и траекторной информации. Для перемещения дирижабля по земле используются устройства, содержащие управляемую гидравлическую подвеску колесных шасси. ТПК содержит верхнюю и нижнюю крышки, управляемые удерживающие устройства, опорные пояса, кабельную, гидравлическую и газовую сети, воздуховоды, автоматическое стыковочное устройство и внутреннюю плату механической расстыковки коммуникаций РКН с коммуникациями ТПК. Наземная стартовая площадка позволяет проводить операции по установке ТПК с РКН на опорно-удерживающее устройство вне конструкции дирижабля с использованием штатных средств установки ТПК с РКН, а также операции по приведению АРКК в исходное состояние в случае возникновения сбоев, неисправностей и отказов.
Недостатком данного АРКК является сложность стабилизации положения РКН в период ее свободного падения после десантирования из ТПК до запуска ракетных двигательных установок, возможность столкновения РКН с дирижаблем после запуска ее двигательных установок.
Технической задачей является повышение надежности и безопасности АРКК, а также точности выведения КА на заданную орбиту.
Поставленная задача решается за счет:
 применения доработанной РКН снабженной контейнером с парашютной системой, установленным на верхней части головного обтекателя (ГО) усиленной конструкции, посредством узла крепления с пиропатроном;
применения доработанной РКН снабженной контейнером с парашютной системой, установленным на верхней части головного обтекателя (ГО) усиленной конструкции, посредством узла крепления с пиропатроном;
 применения в составе дирижабля сканирующих устройств, определяющих пространственное положение РКН после ее десантирования из ТПК и участвующих в формировании команды на запуск двигательной установки РКН с целью исключения столкновения РКН с дирижаблем.
применения в составе дирижабля сканирующих устройств, определяющих пространственное положение РКН после ее десантирования из ТПК и участвующих в формировании команды на запуск двигательной установки РКН с целью исключения столкновения РКН с дирижаблем.
Сущность изобретения поясняется рисунками на фиг. 1-8.
Краткое описание чертежей
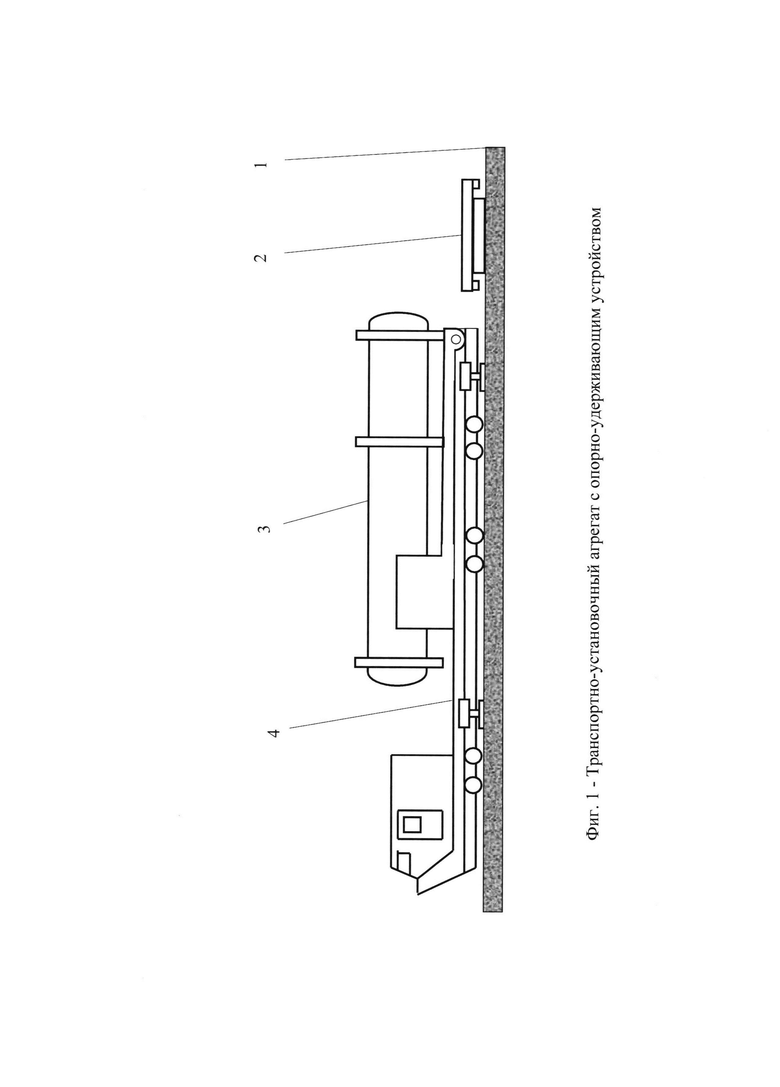
На фиг. 1 показана оборудованная в инженерном отношении наземная стартовая площадка 1, на которой размещено опорно-удерживающее устройство 2, предназначенное для приема ТПК 3 с транспортно-установочного агрегата 4 и последующего удержания ТПК в вертикальном положении.
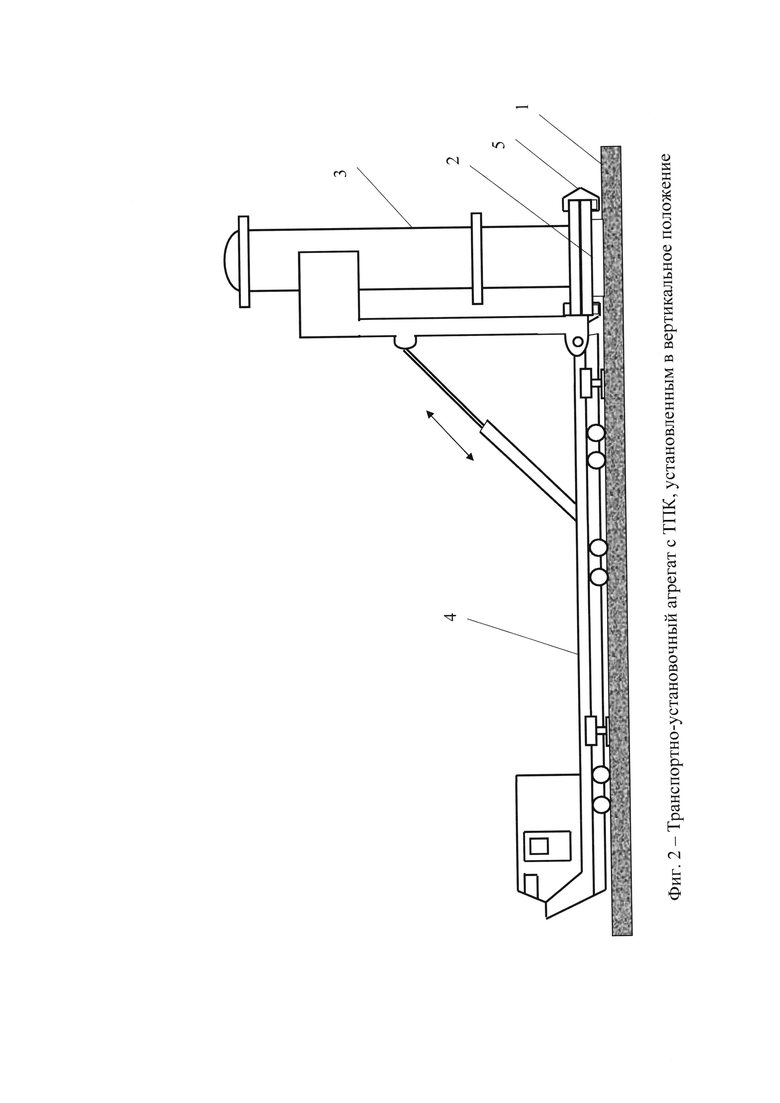
На фиг. 2 показаны аналогичные позиции АРКК в момент, когда с помощью транспортно-установочного агрегата 4 ТПК 3, содержащий РКН, устанавливается в вертикальное положение на опорно-удерживающее устройство 2 и удерживается на нем с помощью автоматизированных фиксирующих устройств 5.
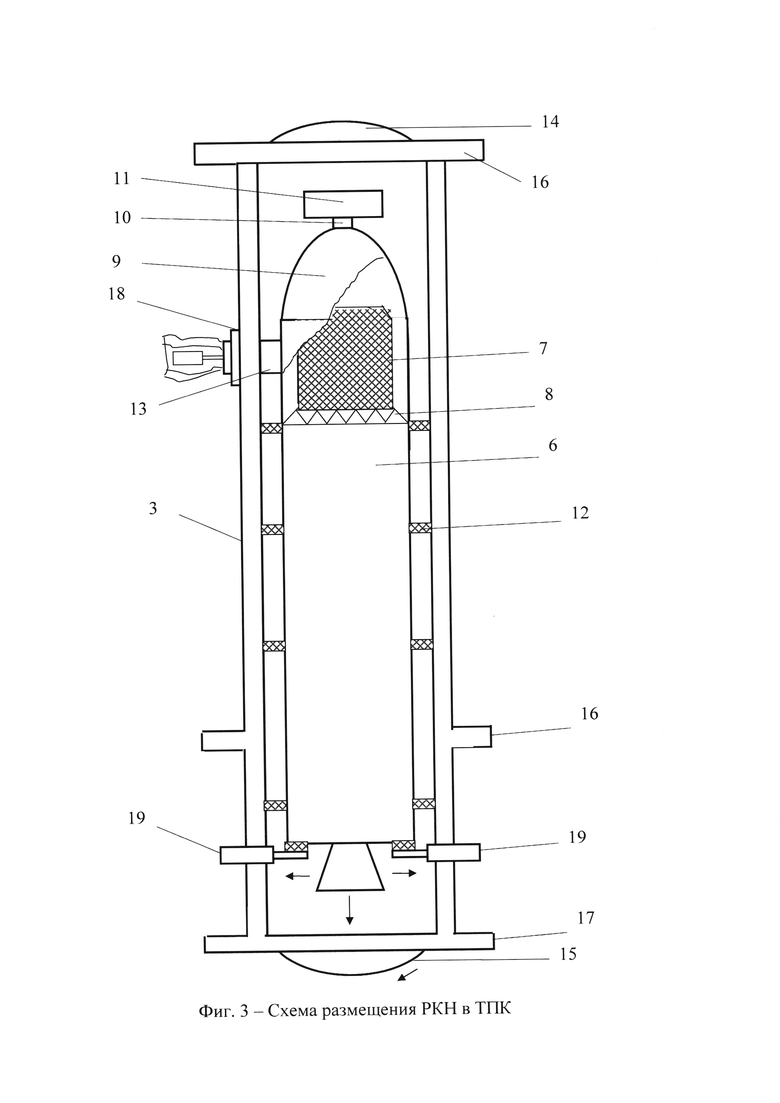
На фиг. 3 показаны ТПК 3 и РКН в составе ракеты-носителя (РН) 6, КА 7 с адаптером 8 и ГО 9 с усиленной конструкцией, снабженного в верхней части узлом крепления с пиропатроном 10 и парашютной системой в контейнере 11. При этом, РН 6 имеет опорно-ведущие пояса 12 и внутреннюю плату 13 механической расстыковки коммуникаций РКН с коммуникациями ТПК.
ТПК 3 выполнен в виде оболочки с верхней 14 и нижней 15 крышками и снабжен опорными поясами 16, а также кабельной, гидравлической, газовой сетями и воздуховодами (на рисунке не показаны). Нижний опорный пояс 17 предназначен для установки ТПК на опорно-удерживающее устройство 2.
Интерфейс дирижабля и ТПК осуществляется с использованием автоматического стыковочного устройства 18, обеспечивающего многократную реализацию циклов соединения-разъединения кабельной, гидравлической, газовой сетей и воздуховодов дирижабля и ТПК.
Нижняя крышка 15 и управляемые удерживающие устройства 19 предназначены для сброса РКН из ТПК.
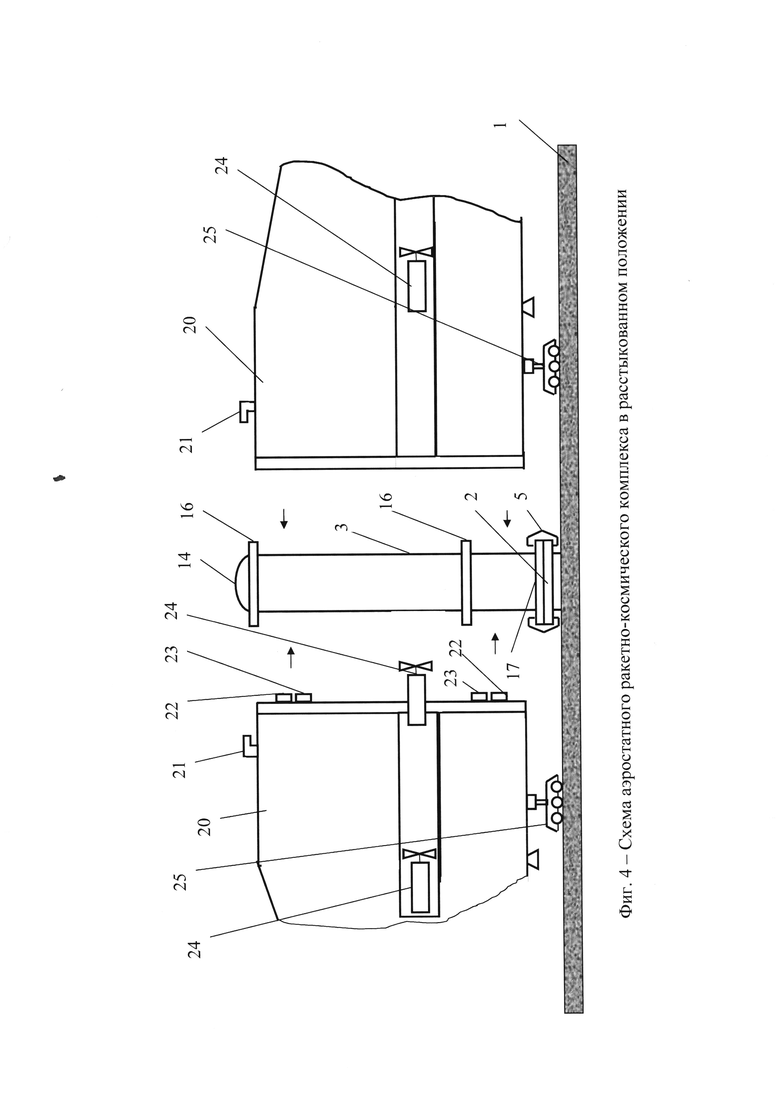
На фиг. 4 показан вид сбоку на АРКК в момент, когда ТПК 3 установлен на опорно-удерживающее устройство 2 и удерживается на нем с помощью автоматизированных фиксирующих устройств 5, а две симметричные части дирижабля 20 готовы к выполнению операции стыковки с ТПК 3. В состав дирижабля входят автоматические узлы крепления 21 опорных поясов 16 ТПК 3 на опорных поясах дирижабля, управляемые стыковочные механизмы 22 для соединения двух частей дирижабля в единую конструкцию, управляемые стыковочные механизмы 23 для соединения электрических, гидравлических и газовых разъемов, электродвигатели с воздушными винтами 24, изменяющими свое положение из горизонтального в вертикальное, убирающиеся колесные шасси 25 с управляемой гидравлической подвеской.
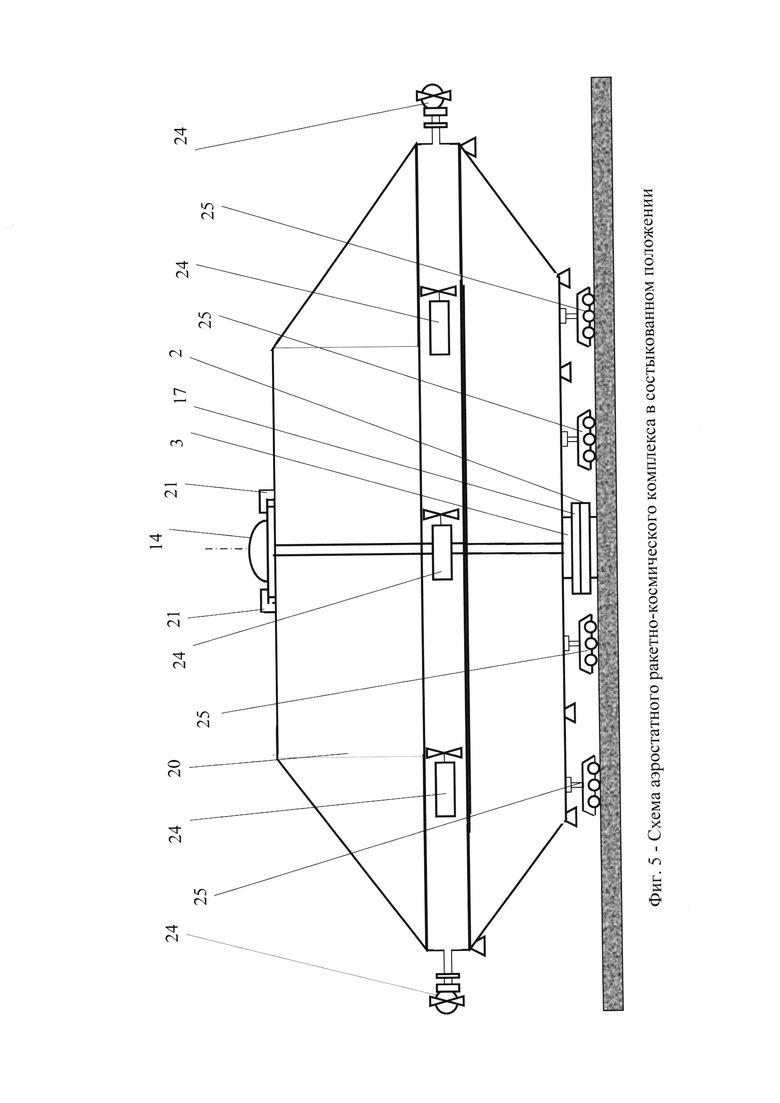
На фиг. 5 показан вид сбоку на АРКК в состыкованном положении его составных частей. На данном рисунке дирижабль 20 с ТПК 3 готов к подъему в воздух, автоматизированные фиксирующие устройства 5 (см. фиг. 4) убраны.
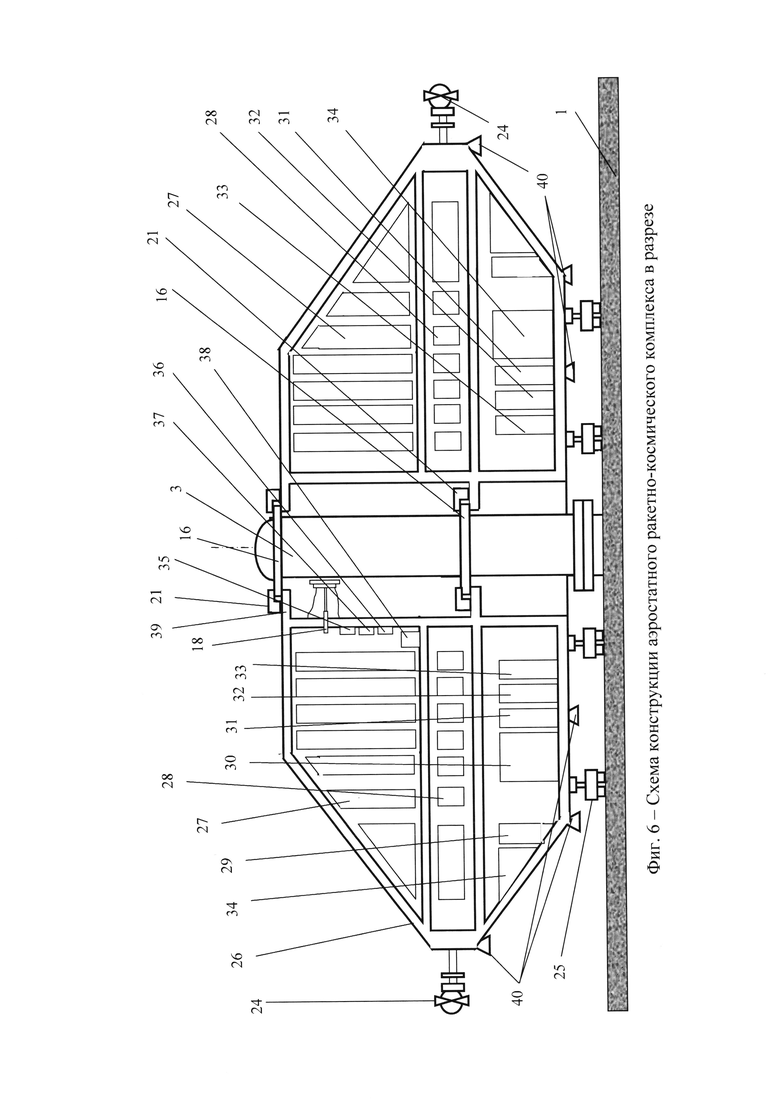
На фиг. 6 показан вид сбоку на конструкцию АРКК в разрезе. Основу дирижабля составляет пространственный каркас 26, состоящий из двух симметричных частей и выполненный, например, в виде ферм из легких сплавов. Внутри каркаса 26 размещены мягкие рабочие оболочки 27 и мягкие резервные оболочки 28, система управления плавучестью 29, емкости с жидким гелием 30, компрессоры 31, трубопроводы с управляемыми клапанами (на рисунке не показаны), аккумуляторные батареи 32, системы подзарядки аккумуляторных батарей 33, система дистанционного управления движением дирижабля 34, система дистанционного управления подготовкой к пуску и пуском РКН 35, система термостатирования РКН 36, средства приемо-передачи телеметрической и траекторной информации 37, система электроснабжения оборудования 38, предназначенная для подготовки к пуску и пуска РКН, автоматическое стыковочное устройство 18, убирающиеся колесные шасси 25 с управляемой гидроподвеской, ТПК 3. С внешней стороны каркас 26 покрыт твердой оболочкой, выполненной, например, из легких композиционных материалов (на рисунке не показана) и на нем размещены автоматические узлы крепления 21 опорных поясов 16 ТПК 3 на опорных поясах 39 дирижабля, а также электродвигатели с воздушными винтами 24 и сканирующие устройства 40.
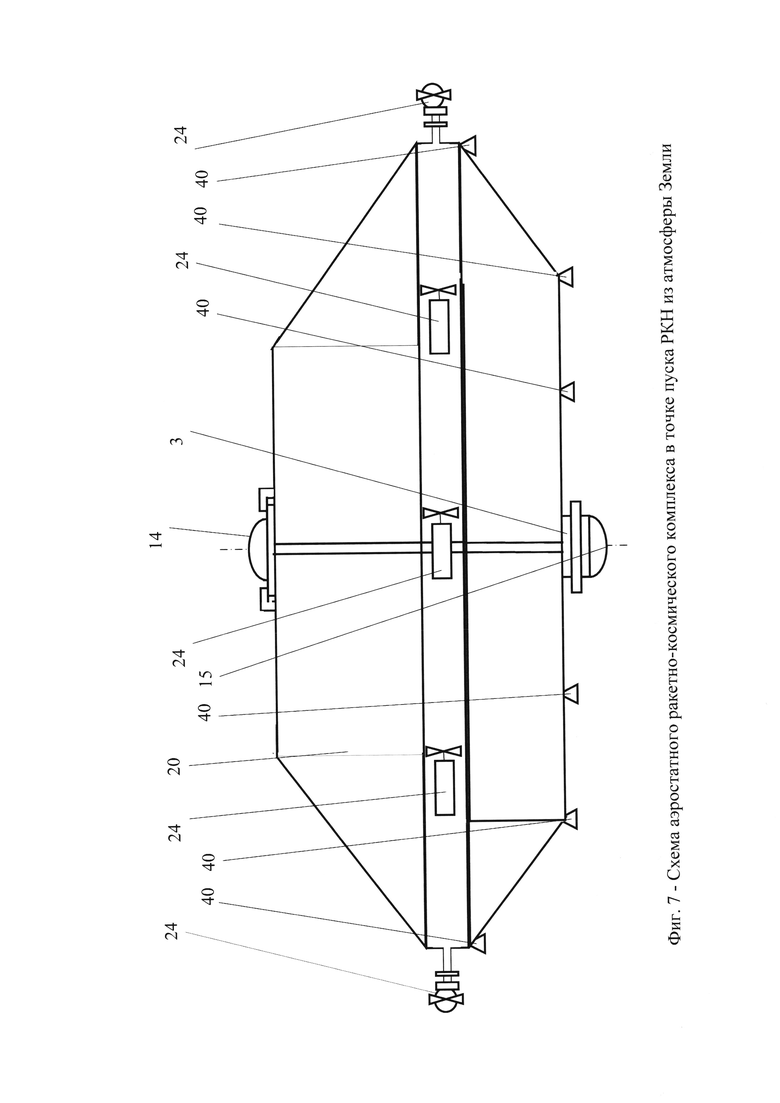
На фиг. 7 показан вид сбоку на АРКК в точке пуска РКН из атмосферы Земли. На данном рисунке дирижабль 20 с ТПК 3 находится в воздухе, верхняя 14 и нижняя 15 крышки ТПК закрыты. Сканирующие устройства 40, расположенные равномерно на нижней части дискообразного тороидального дирижабля, не включены. Электродвигатели с воздушными винтами 24, вместе с системами управления плавучестью и дистанционного управления движением дирижабля, технологическим оборудованием дирижабля (на фиг. 7 не показаны) обеспечивают нахождение АРКК в заданной точке атмосферы Земли.
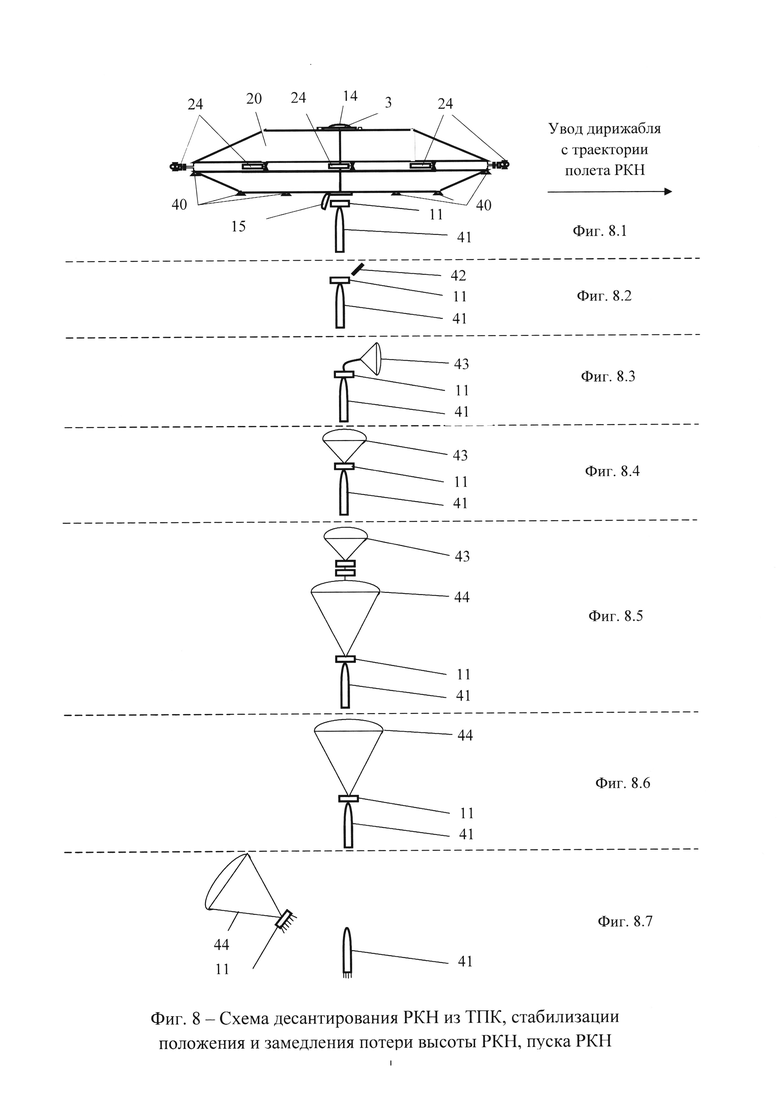
На фиг. 8 показана схема десантирования РКН 41 из ТПК 3, стабилизации ее положения, замедления потери высоты и пуска.
В состав фиг. 8 входят фиг. 8.1 - фиг. 8.7, на которых показаны этапы десантирования РКН 41 из ТПК 3, а также использования узла крепления с пиропатроном 10 и парашютной системой в контейнере 11, включающей в себя помимо контейнера, крышку контейнера 42, тормозной парашют 43 и основной парашют 44.
Функционирование АРКК производится следующим образом.
Исходное состояние АЭРКК: проведена циклограмма полготовки КА 7 к запуску; КА 7 установлен на адаптер 8 и закрыт ГО 9; адаптер 8 с КА 7, закрытый ГО 9, пристыкован к РН 6, образуя РКН; проведены проверки РКН; РКН находится в ТПК 3; ТПК 3 размещен в транспортно-установочном агрегате 4 в горизонтальном положении (перечисленные операции по подготовке РКН к пуску аналогичны операциям, приведенным в патенте РФ №2179941 [2]); опорно-удерживающее устройство 2 готово к приему ТПК 3 с транспортно-установочного агрегата 4; две части дирижабля 20 находятся на стартовой площадке 1 в местах симметричных относительно опорно-удерживающего устройства 2, подготовлены к полету и к выполнению операции стыковки с ТПК 3.
По команде руководителя работ транспортно-установочный агрегат 4 с размещенным на нем ТПК 3 подъезжает к опорно-удерживающему устройству 2 (см. фиг. 1). Далее ТПК 3 поднимается в вертикальное положение, устанавливается на опорно-удерживающее устройство 2 и закрепляется на нем с помощью автоматизированных фиксирующих устройств 5 (см. фиг. 2), после чего транспортно-установочный агрегат 4 отъезжает на такое расстояние, чтобы не мешать последующим операциям по стыковке частей дирижабля 20 друг с другом и с ТПК 3.
После отъезда транспортно-установочного агрегата 4 на требуемое расстояние симметричные части дирижабля 20 начинают движение навстречу друг другу, при этом необходимая высота конструкции дирижабля над уровнем поверхности стартовой площадки 1 устанавливается, в том числе, с помощью управляемых гидравлических подвесок колесных шасси 25. В процессе стыковки симметричных частей дирижабля 20 друг с другом и с ТПК 3 происходит заход опорных поясов 39 дирижабля под опорные пояса 16 ТПК 3 и закрепление последних на опорных поясах 39 дирижабля с помощью автоматических узлов крепления 21. Кроме того, благодаря управляемым стыковочным механизмам 22, 23 происходит соединение двух частей дирижабля в единую конструкцию, а также соединение электрических, гидравлических и газовых разъемов дирижабля.
После образования единой конструкции мобильной части АРКК происходит срабатывание автоматического стыковочного устройства 18 (см. фиг. 3, фиг. 6), обеспечивая соединение кабельной, гидравлической, газовой сетей и воздуховодов дирижабля и ТПК.
После проведения проверок правильности стыковочных операций, включается система термостатирования РКН 36, обеспечивая тем самым заданный температурно-влажностный режим для РН 6 и КА 7 при нахождении мобильной части АРКК на стартовой площадке 1 и в полете к месту пуска РКН.
После набора стартовой готовности мобильной части АРКК на стартовой площадке 1 убираются автоматизированные фиксирующие устройства 5 и начинается подъем дирижабля. Для создания архимедовой силы происходит наполнение оболочек 27 или 28 газообразным гелием в количестве, необходимом для подъема дирижабля на заданную высоту. Наполнение данных оболочек происходит путем использования компрессоров 31 (см. фиг. 6), трубопроводов с управляемыми клапанами (на рисунке не показаны), емкостей с жидким гелием 30 и системы управления плавучестью 29, функционально являющейся подсистемой системы дистанционного управления движением дирижабля 34.
Электродвигатели с воздушными винтами 24, изменяющими свое положение из горизонтального в вертикальное, предназначены для создания тяги в вертикальной и горизонтальной плоскостях. Снабжение электродвигателей 24 электрической энергией осуществляется от аккумуляторных батарей 32, соединенных с системами подзарядки аккумуляторных батарей 33. Кроме того, системы подзарядки аккумуляторных батарей 33 обеспечивают электрической энергией систему электроснабжения оборудования, предназначенного для подготовки к пуску и пуска РКН.
При достижении дирижаблем заданной точки старта РКН при необходимости системой дистанционного управления подготовкой к пуску и пуском РКН 35 проводятся предстартовые электрические проверки КА 7 и РН 6. После чего последовательно происходит открытие нижней крышки 15 ТПК 3 и срабатывание управляемых удерживающих устройств 19, обеспечивая тем самым условия сброса РКН из ТПК 3 (см. фиг. 3 и фиг. 8.1). При движении РКН вниз из ТПК 3 осуществляется последовательный сброс ее опорно-ведущих поясов 12 и отсоединение внутренней платы 13 механической расстыковки коммуникаций РКН с коммуникациями ТПК 3. Включаются сканирующие устройства 40.
После падения РКН 41 из ТПК 3 происходит отстрел крышки 42 парашютного контейнера 11 (см. фиг 8.2). Затем осуществляется ввод в действие тормозного парашюта 43 (см. фиг. 8.3). Одновременно осуществляется увод дирижабля с планируемой траектории полета РКН и контроль сканирующими устройствами 40 пространственного положения РКН 41.
Далее происходит спуск РКН на тормозном парашюте 43 (см. фиг. 8.4) с последующим его отделением вводом в действие основного парашюта 44 (см. фиг. 8.5). В данном случае так называемая двухкаскадная парашютная система используется с целью снижения ударных нагрузок на РКН [3, 4].
Спуск на основном парашюте 44 (см. фиг. 8.6) обеспечивает стабилизацию положения и замедление потери высоты РКН, а также гарантированный увод дирижабля с планируемой траектории полета РКН.
После стабилизации положения РКН в атмосфере Земли и получении сигнала от сканирующих устройств 40 о безопасном расположении дирижабля по отношению к РКН происходит отделение основного парашюта 44 с контейнером 11 и включение двигательной установки РКН 41 (см. фиг. 8.7), за счет чего достигается повышение надежности и безопасности АРКК, а также точности выведения КА на заданную орбиту.
После осуществления дирижаблем 20 маневра ухода с траектории полета РКН 41, дирижабль возвращается на стартовую площадку 1. Для снижения дирижабля 20 по сигналам системы управления плавучестью 29 происходит отбор гелия из оболочек 27 или 28 и последующее его сжатие компрессорами 31.
Прием телеметрической и траекторной информации от РН 6 и КА 7 может осуществляться измерительными пунктами наземного, морского и воздушного базирования, при этом средства приемо-передачи телеметрической и траекторной информации 37 располагаются и на дирижабле.
Источники информации
1. Патент РФ №2682893, кл. B64G 1/00; В64В 1/00, 2019 г.
2. Патент РФ №2179941, кл. B64G 1/00; B64G 1/40, 2002 г.
3. Лялин В.В, Морозов В.И., Пономарев А.Т. Парашютные системы. Проблемы и методы их решения. - М.: ФИЗМАТЛИТ, 2009 - 576 с.
4. Рабинович Б.А. Безопасность космонавта при посадочном ударе спускаемого аппарата о грунт. Москва, 2014 - 282 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОСТАТНЫЙ РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2682893C1 |
| Авиационный ракетно-космический комплекс, формируемый на базе ракеты космического назначения, адаптируемой из МБР ТОПОЛЬ-М, и самолёта-носителя ИЛ-76МФ по выведению малых КА на целевые орбиты путём десантирования РКН из самолёта с применением комбинированной транспортно-пусковой платформы и подъёмно-стабилизирующего парашюта | 2016 |
|
RU2636447C2 |
| СПОСОБ ПЕРЕОБОРУДОВАНИЯ БОЕВЫХ ТВЕРДОТОПЛИВНЫХ РАКЕТ В ТВЕРДОТОПЛИВНУЮ РАКЕТУ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1998 |
|
RU2142898C1 |
| СПОСОБ ДЕСАНТИРОВАНИЯ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ ПРИ ПУСКЕ ИЗ САМОЛЕТА-НОСИТЕЛЯ И АВИАЦИОННАЯ ПУСКОВАЯ УСТАНОВКА | 2015 |
|
RU2595742C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| УНИВЕРСАЛЬНАЯ КОСМИЧЕСКАЯ ТРАНСПОРТНАЯ СИСТЕМА НА БАЗЕ СЕМЕЙСТВА РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ ЛЁГКОГО, СРЕДНЕГО И ТЯЖЁЛОГО КЛАССОВ С ЗАПУСКОМ РАКЕТ-НОСИТЕЛЕЙ НАД АКВАТОРИЕЙ МИРОВОГО ОКЕАНА | 2018 |
|
RU2729912C1 |
| КОСМИЧЕСКАЯ ТРАНСПОРТНАЯ СИСТЕМА НА БАЗЕ СЕМЕЙСТВА РАКЕТ-НОСИТЕЛЕЙ ЛЕГКОГО, СРЕДНЕГО И ТЯЖЕЛОГО КЛАССОВ С ВОЗДУШНЫМ СТАРТОМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ С БОРТА ЭКРАНОЛЕТА И СПОСОБ ЕЕ ФУНКЦИОНИРОВАНИЯ | 2014 |
|
RU2659609C2 |
| РАКЕТНО-СТАРТОВЫЙ КОМПЛЕКС С РАКЕТНО-КАТАПУЛЬТНЫМ АППАРАТОМ ДЛЯ ПОЛЕТОВ НА ЛУНУ И ОБРАТНО | 2020 |
|
RU2743061C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2025645C1 |
| ВОЗДУШНЫЙ СТАРТОВЫЙ КОМПЛЕКС | 2023 |
|
RU2827435C1 |
Изобретение относится к области ракетно-космической техники и летательных аппаратов легче воздуха. Аэростатный ракетно-космический комплекс включает дирижабль, ракету космического назначения, транспортно-пусковой контейнер, наземную стартовую площадку с опорно-удерживающим устройством и транспортно-установочный агрегат. Ракета космического назначения снабжена контейнером с парашютной системой. Головной обтекатель выполнен усиленной конструкции, на верхней части которой установлен посредством узла крепления с пиропатроном контейнер с возможностью стабилизировать положение ракеты космического назначения перед включением двигательной установки ракеты-носителя. На нижней части дискообразного тороидального дирижабля равномерно установлены сканирующие устройства, позволяющие определять пространственное положение ракеты космического назначения после ее десантирования из транспортно-пускового контейнера и участвующие в формировании команды на запуск двигательной установки ракеты космического назначения. Изобретение направлено на расширение арсенала средств для запуска космических аппаратов. 1 з.п. ф-лы, 8 ил.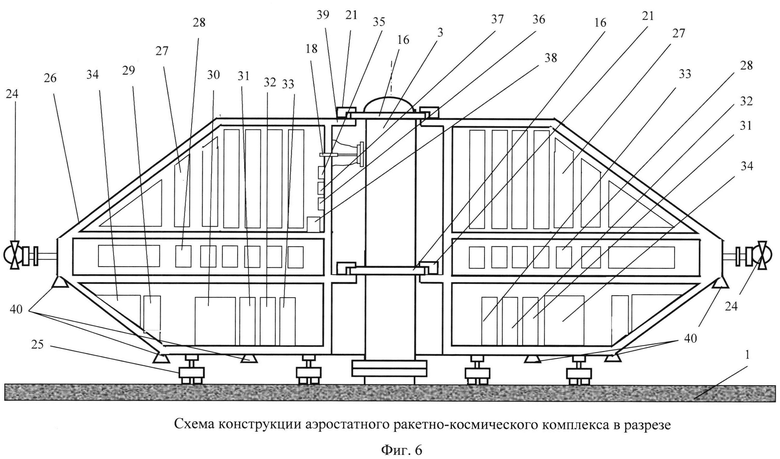
1. Аэростатный ракетно-космический комплекс, включающий дирижабль, ракету космического назначения, транспортно-пусковой контейнер, наземную стартовую площадку с опорно-удерживающим устройством, транспортно-установочный агрегат, при этом дирижабль выполнен в виде двух идентичных дискообразной тороидальной формы конструкций, соединенных по диаметру стыковочными механизмами; ракета космического назначения содержит головной обтекатель, ракету-носитель, космический аппарат и адаптер; транспортно-пусковой контейнер содержит верхнюю и нижнюю крышки, управляемые удерживающие устройства, опорные пояса, кабельную, гидравлическую и газовую сети, воздуховоды, автоматическое стыковочное устройство и внутреннюю плату механической расстыковки коммуникаций ракеты космического назначения с коммуникациями транспортно-пускового контейнера, отличающийся тем, что ракета космического назначения снабжена контейнером с парашютной системой, головной обтекатель выполнен усиленной конструкции, на верхней части которой установлен посредством узла крепления с пиропатроном упомянутый контейнер с возможностью стабилизировать положение ракеты космического назначения перед включением двигательной установки ракеты-носителя.
2. Аэростатный ракетно-космический комплекс по п. 1, отличающийся тем, что в нижней части дискообразного тороидального дирижабля равномерно установлены сканирующие устройства определения расположения дирижабля по отношению к ракете космического назначения.
| АЭРОСТАТНЫЙ РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2682893C1 |
| СПОСОБ И УСТРОЙСТВО ЭКОНОМИЧНОГО ОБЩЕГО ОБОГРЕВА ЖИВОТНОВОДЧЕСКОГО ПОМЕЩЕНИЯ И ЛОКАЛЬНОГО ОБОГРЕВА СЕЛЬСКОХОЗЯЙСТВЕННЫХ ЖИВОТНЫХ | 2003 |
|
RU2229155C1 |
| US 20080283659 A1, 20.11.2008. | |||

