ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет и преимущества заявки на патент США с серийным номером 16/024 231, поданной 29 июня 2018 г., которая полностью включена в настоящий документ посредством ссылки.
Область техники, к которой относится изобретение
[0002] Это раскрытие относится к управлению работой транспортного средства и вождению, включая автономное управление работой транспортного средства и автономное вождение.
Уровень техники
[0003] Транспортное средство, такое как автономное транспортное средство, может пересекать часть транспортной сети транспортных средств. Пересечение транспортной сети транспортных средств или ее части может включать в себя формирование или захват, например, посредством датчика транспортного средства, данных, таких как данные, представляющие среду работы или ее часть транспортного средства. При пересечении транспортной сети транспортных средств транспортное средство встречает других участников дорожного движения. Соответственно, могут быть полезны система, способ и устройство для интерактивной внешней связи транспортного средства с пользователем.
Сущность изобретения
[0004] В настоящем документе раскрыты аспекты, признаки, элементы, реализации и варианты осуществления интерактивной внешней связи транспортного средства с пользователем.
[0005] Аспектом раскрытых вариантов осуществления является автономное транспортное средство (AV - autonomous vehicle), выполненное с возможностью пересечения части транспортной сети транспортных средств. AV включает в себя процессор, выполненный с возможностью выполнения инструкций, хранящихся на не кратковременном считываемом компьютером носителе данных, для идентификации информации о среде работы, представляющей текущую среду работы для AV, так что информация о среде работы включает в себя информацию, представляющую идентифицированный аспект текущей среды работы; идентификации целевого внешнего пользователя на основе текущей среды работы для AV, целевой внешний пользователь идентифицируется на основе информации датчика от датчика AV; управления AV для вывода для целевого внешнего пользователя первого семиотического представления информации управления AV, связанной с информацией о среде работы; приема подтверждения первого семиотического представления от целевого внешнего пользователя; и в ответ на подтверждение управления AV для пересечения части транспортной сети транспортных средств, так что управление AV для пересечения части транспортной сети транспортных средств включает в себя управление AV для вывода второго семиотического представления на основе подтверждения от целевого внешнего пользователя.
[0006] Другой аспект раскрытых вариантов осуществления представляет собой автономное транспортное средство (AV), выполненное с возможностью интерактивной внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением. AV включает в себя процессор, выполненный с возможностью выполнения инструкций, хранящихся на не кратковременном считываемом компьютером носителе данных, для идентификации контекста работы AV; подтверждения личности внешнего пользователя; и в ответ на подтверждение личности внешнего пользователя обеспечения внешнему пользователю доступа к аспекту AV на основе контекста работы.
[0007] Другой аспект раскрытых вариантов осуществления - это способ пересечения части транспортной сети транспортных средств посредством автономного транспортного средства (AV), включая идентификацию информации о среде работы, представляющей текущую среду работы для AV, таким образом, что информация о среде работы включает в себя информацию, представляющую идентифицированный аспект текущей среды работы; идентификацию целевого внешнего пользователя на основе текущей среды работы для AV, целевой внешний пользователь идентифицируется на основе информации датчика от датчика AV; управление AV для вывода для целевого внешнего пользователя первого семиотического представления информации управления AV, связанной с информацией о среде работы; прием подтверждения первого семиотического представления от целевого внешнего пользователя; и в ответ на подтверждение, управление AV для пересечения части транспортной сети транспортных средств, так что управление AV для пересечения части транспортной сети транспортных средств включает в себя управление AV для вывода второго семиотического представления на основе подтверждения от целевого внешнего пользователя.
[0008] Вариации в этих и других аспектах, признаках, элементах, реализациях и вариантах осуществления способов, аппаратур, процедур и алгоритмов, раскрытых в данном документе, описаны более подробно ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Раскрытие изобретения лучше всего можно понять из следующего подробного описания при его прочтении совместно с сопровождающими чертежами. Подчеркивается, что в соответствии с общепринятой практикой различные элементы чертежей выполнены не в масштабе. Напротив, для ясности размеры различных элементов произвольно увеличиваются или уменьшаются.
[0010] Фиг. 1 является схемой примера транспортного средства, в котором могут быть реализованы аспекты, признаки и элементы, раскрытые в данном документе.
[0011] Фиг. 2 является схемой примера части транспортной системы связи транспортного средства, в которой могут быть реализованы раскрытые здесь аспекты, признаки и элементы.
[0012] Фиг. 3 является схемой части транспортной сети транспортных средств в соответствии с этим раскрытием.
[0013] Фиг. 4 - схема примера интерактивной внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением в соответствии с реализациями этого раскрытия.
[0014] Фиг. 5 - схема системы для интерактивной внешней связи транспортного средства с пользователем в соответствии с реализациями этого раскрытия.
[0015] Фиг. 6 - блок-схема последовательности операций процесса интерактивной внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением в соответствии с реализациями этого раскрытия.
[0016] Фиг. 7 - схема примера интерактивной внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением для пересечения сценария остановки, чтобы уступить дорогу, в соответствии с реализациями этого раскрытия.
[0017] ФИГ. 8 - блок-схема последовательности операций процесса интерактивной внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением в соответствии с реализациями этого раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
[0018] Транспортное средство, такое как автономное транспортное средство или полуавтономное транспортное средство, может пересекать часть транспортной сети транспортных средств, которая может включать в себя один или несколько внешних объектов (здесь также называемых пользователями, участниками дорожного движения или другими участниками дорожного движения), например пешеходов, удаленных транспортных средств, других объектов в среде работы транспортного средства. Эффективное пересечение транспортной сети транспортных средств может включать в себя эффективное обеспечение информации, описывающей текущие и предстоящие операции транспортного средства с пешеходами, удаленными транспортными средствами и другими соответствующими внешними объектами в среде работы транспортного средства. Механизмы обеспечения информации, описывающей текущие и предстоящие операции транспортного средства с пешеходами, удаленными транспортными средств и другими соответствующими внешними объектами в среде работы транспортного средства, приема подтверждений и/или обеспечения дополнительной информации, описывающей операции транспортного средства могут быть ограничены.
[0019] Интерактивная внешняя связь транспортного средства с пользователем может включать в себя идентификацию различных аспектов текущей среды работы транспортного средства, таких как наличие внешних объектов, идентификацию информации, касающейся текущих или предстоящих операций транспортного средства, определение различных параметров для вывода семиотического представления текущих или предстоящих операций транспортного средства с пешеходами, удаленными транспортными средствами и другими соответствующими внешними объектами в среде работы транспортного средства и вывод семиотического представления текущих или предстоящих операций транспортного средства, что может повысить безопасность и эффективность работы транспортного средства. Например, пешеходы, удаленные транспортные средства и другие соответствующие внешние объекты в среде работы транспортного средства могут использовать информацию, указанную посредством семиотического представления, для идентификации ожидаемого пути, текущего состояния работы, предстоящего состояния работы или комбинации из них для транспортного средства.
[0020] Вывод семиотического представления текущих или предстоящих операций транспортного средства может включать в себя управление одной или несколькими модальностями для вывода семиотического представления текущих или предстоящих операций транспортного средства, которые могут включать в себя управление движением транспортного средства для вывода семиотического представления текущих или предстоящих операций транспортного средства или его части.
[0021] Приведены примеры семиотических представлений текущих или предстоящих операций транспортного средства. В приведенных здесь примерах семиотические представления показаны как включающие текстовые сообщения. Однако, как очевидно из приведенного ниже описания, возможны другие режимы (например, модальности) семиотических представлений.
[0022] Например, семиотическое представление может включать в себя информацию (например, индикатор намерения или состояние движения), которая сообщает другим участникам дорожного движения намерение (например, относительно текущего или запланированного движения транспортного средства) операций транспортного средства. Намерение может относиться к текущей и/или будущей работы (например, действию) транспортного средства. Примеры индикаторов намерений включают в себя текстовые сообщения «Я останавливаюсь», «Я уступаю дорогу» или «Я жду».
[0023] Например, семиотическое представление может включать в себя информацию (например, индикатор режима или индикатор состояния работы), которая сообщает другим участникам дорожного движения состояние работы транспортного средства, такое как, например, активировано ли в настоящее время автономное вождение или нет и/или находится ли в транспортном средстве водитель-человек. Примеры индикаторов состояния работы включают в себя сообщения и/или сигналы (например, огни, символы и т.д.), которые сообщают: «Автономное вождение включено» и «Автономное вождение выключено».
[0024] Например, семиотическое представление может включать в себя сенсорную информацию и/или информацию подтверждения. В одном примере сенсорная информация может сообщать другим участникам дорожного движения, что другие участники дорожного движения были обнаружены (например, посредством приема информации от одного или нескольких датчиков транспортного средства). Примером сенсорного сообщения может быть «Я вижу тебя».
[0025] Например, семиотическое представление может включать в себя сигнальную информацию. В примере сигнальной информации семиотическое представление может передавать информацию из-за аварийной ситуации или сбоя системы. В одном примере семиотическое представление может включать в себя сигнал и сообщение. Например, может работать световой поток одного или нескольких освещенных элементов транспортного средства (например, сигнал поворота, указывающий на намерение переместить транспортное средство на обочину дороги) и может отображаться сообщение «Я подъезжаю к остановке».
[0026] Например, семиотическое представление может включать в себя сигналы помощи при движении по дороге. Сигналы помощи при движении по дороге могут включать в себя информацию, которая может помочь другим участникам дорожного движения пересечь часть транспортной сети транспортных средств. В примерном сценарии транспортное средство может быть остановлено у знака остановки, чтобы уступить дорогу пешеходу, переходящему дорогу. Пешеход может быть закрыт для обзора другого приближающегося транспортного средства. Таким образом, семиотическое представление может включать в себя сообщение водителю другого транспортного средства, которое, по существу, сообщает: «Пешеход, который не виден вам, пересекает дорогу».
[0027] Семиотическое представление может быть связано с контекстом работы транспортного средства. Контекст работы может быть связан с целью работы текущей работы транспортного средства. Один или несколько параметров могут быть связаны с контекстом работы и/или требоваться ему.
[0028] В иллюстративном примере контекста работы транспортное средство может работать как автономное такси, при этом клиент (т.е. целевой внешний пользователь) по имени Джим вызвал такси (например, виртуально через мобильное устройство или каким-либо другим способом) и обеспечил место посадки (например, адрес, ориентир, перекресток и т.д.). По существу, контекст работы может быть определен как «роботакси» или т.п., а параметры контекста работы могут включать в себя имя клиента (то есть «Джим») и место посадки. По прибытии в пункт посадки семиотическое представление может включать в себя сообщение «Я - машина Джима».
[0029] В другом иллюстративном примере контекста работы транспортное средство может работать как автономное транспортное средство доставки, посредством которого покупатель (то есть целевой внешний пользователь) заказал (например, через веб-сайт, мобильное устройство, заказ по телефону и т.п.) товар (например, еду) у продавца и обеспечил адрес доставки. По существу, контекст работы может быть определен как «роботизированная доставка» или тому подобное, а параметры контекста работы могут включать в себя имя клиента, объект доставки и адрес доставки. По прибытии на адрес доставки семиотическое представление может включать в себя сообщение «Ваша посылка прибыла».
[0030] Приведенные выше примеры семиотических представлений являются примерами уведомления пользователей (например, других участников дорожного движения), например, о состоянии работы, сенсорном состоянии, состоянии движения или состоянии контекста работы. По существу, уведомления представляют собой одностороннюю связь (например, от транспортного средства к одному или нескольким пользователям).
[0031] Однако в некоторых ситуациях недостаточно, чтобы транспортное средство выводило семиотическое представление текущих или предстоящих операций транспортного средства. В некоторых ситуациях односторонней связи (например, от транспортного средства к одному или нескольким пользователям) недостаточно для других участников дорожного движения и/или транспортного средства для безопасного пересечения транспортной сети транспортных средств или ее части.
[0032] В некоторых ситуациях семиотическое представление может быть нацелено на конкретного пользователя (например, целевой внешний пользователь), и требуется принять подтверждение от целевого внешнего пользователя и, в ответ на подтверждение, управлять транспортным средством для пересечения части транспортной сети транспортных средств, что может включать в себя управление транспортным средством для вывода второго семиотического представления на основе подтверждения.
[0033] В некоторых ситуациях, например, в случае контекста работы, может быть недостаточно обеспечения уведомлений. Напротив, в некоторых ситуациях могут потребоваться дополнительные взаимодействия для удовлетворительного и/или безопасного завершения контекста работы.
[0034] Хотя в настоящем описании дана ссылка на автономное транспортное средство, способы и устройство, описанные здесь, могут быть реализованы в любом транспортном средстве, выполненном с возможностью автономной или полуавтономной работы. Хотя в настоящем описании дана ссылка на транспортную сеть транспортных средств, описанные здесь способ и устройство могут включать в себя автономное транспортное средство, работающее в любой области, по которой может перемещаться транспортное средство.
[0035] Фиг. 1 является схемой примера транспортного средства, в котором могут быть реализованы аспекты, признаки и элементы, раскрытые в данном документе. Как показано, транспортное средство 1000 включает в себя шасси 1100, трансмиссию 1200, контроллер 1300, колеса 1400 и может включать в себя любой другой элемент или комбинацию элементов транспортного средства. Хотя для простоты транспортное средство 1000 показано с четырьмя колесами 1400, можно использовать любое другое двигательное устройство или устройства, такие как воздушный винт или гусеница. На фиг. 1, элементы, соединяющие линии, такие как трансмиссия 1200, контроллер 1300 и колеса 1400, указывают, что информация, такая как данные или сигналы управления, мощность, такая как электрическая мощность или крутящий момент, или как информация, так и мощность, могут быть сообщены между соответствующими элементами. Например, контроллер 1300 может принимать мощность от трансмиссии 1200 и может связываться с трансмиссией 1200, колесами 1400 или и тем, и другим для управления транспортным средством 1000, что может включать в себя ускорение, замедление, рулевое управление или иное управление транспортным средством 1000.
[0036] Трансмиссия 1200 может включать в себя источник 1210 питания, трансмиссию 1220, блок 1230 рулевого управления, привод 1240 или любой другой элемент или комбинацию элементов трансмиссии, например подвеску, приводной вал, оси или выхлопную систему. Хотя колеса 1400 показаны отдельно, они могут быть включены в трансмиссию 1200.
[0037] Источник 1210 питания может включать в себя двигатель, аккумулятор или их комбинацию. Источник 1210 питания может быть любым устройством или комбинацией устройств, обеспечивающих энергию, такую как электрическая энергия, тепловая энергия или кинетическая энергия. Например, источник 1210 питания может включать в себя двигатель, такой как двигатель внутреннего сгорания, электродвигатель или комбинацию двигателя внутреннего сгорания и электродвигателя, и может обеспечивать кинетическую энергию в качестве движущей силы для одного или более колес 1400. Источник 1210 питания может включать в себя блок потенциальной энергии, такой как одна или более аккумуляторных батарей из сухих элементов, таких как никель-кадмиевые (NiCd), никель-цинковые (NiZn), никель-металлогидридные (NiMH), литий-ионные (Li-ионные), солнечные батареи, топливные элементы или любое другое устройство, иеющее возможность обеспечения энергии.
[0038] Трансмиссия 1220 может принимать энергию, такую как кинетическая энергия, от источника 1210 питания и может передавать энергию колесам 1400 для обеспечения движущей силы. Трансмиссия 1220 может управляться посредством контроллера 1300, привода 1240 или и того, и другого. Блок 1230 рулевого управления может управляться посредством контроллера 1300, привода 1240 или и того, и другого и может управлять колесами 1400 для управления транспортным средством. Привод 1240 может принимать сигналы от контроллера 1300 и может приводить в действие или управлять источником 1210 питания, трансмиссией 1220, блоком 1230 рулевого управления или любой их комбинацией для управления транспортным средством 1000.
[0039] Контроллер 1300 может включать в себя блок 1310 определения местоположения, блок 1320 электронной связи, процессор 1330, память 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любую их комбинацию. Хотя он показан как единый блок, любой один или несколько элементов контроллера 1300 могут быть интегрированы в любое количество отдельных физических блоков. Например, пользовательский интерфейс 1350 и процессор 1330 могут быть интегрированы в первый физический блок, а память 1340 может быть интегрирована во второй физический блок. Хотя это не показано на фиг. 1, контроллер 1300 может включать в себя источник питания, например аккумулятор. Хотя они показаны как отдельные элементы, блок 1310 определения местоположения, блок 1320 электронной связи, процессор 1330, память 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любая их комбинация могут быть интегрированы в один или более электронных блоков, схем или микросхем.
[0040] Процессор 1330 может включать в себя любое устройство или комбинацию устройств, выполненных с возможностью манипулирования или обработки сигналов или другой информации, существующей в настоящее время или разработанной в будущем, включая оптические процессоры, квантовые процессоры, молекулярные процессоры или их комбинацию. Например, процессор 1330 может включать в себя один или несколько процессоров специального назначения, один или несколько процессоров цифровых сигналов, один или несколько микропроцессоров, один или несколько контроллеров, один или несколько микроконтроллеров, одну или несколько интегральных схем, одну или несколько специализированных интегральных схем, одну или несколько программируемых пользователем вентильных матриц, одну или несколько программируемых логических матриц, один или несколько программируемых логических контроллеров, один или несколько конечных автоматов или любую их комбинацию. Процессор 1330 может быть функционально связан с блоком 1310 определения местоположения, памятью 1340, интерфейсом 1370 электронной связи, блоком 1320 электронной связи, пользовательским интерфейсом 1350, датчиком 1360, трансмиссией 1200 или любой их комбинацией. Например, процессор может быть функционально связан с памятью 1340 через шину 1380 связи.
[0041] Память 1340 может включать в себя любой материальный энергонезависимый используемый или считываемый компьютером носитель данных, выполненный с возможностью, например, содержания, хранения, передачи или транспортировки машиночитаемых инструкций или любой информации, связанной с ними, для использования посредством или в связи с процессором 1330. Память 1340 может быть, например, одним или несколькими твердотельными накопителями, одной или несколькими картами памяти, одним или несколькими съемными носителями данных, одним или несколькими постоянными запоминающими устройствами, одним или несколькими оперативными запоминающими устройствами, одним или несколькими дисками, включая жесткий диск, дискету, оптический диск, магнитную или оптическую карту или любым другим типом временных носителей данных, подходящим для хранения электронной информации, или любой их комбинацией.
[0042] Интерфейс 1370 электронной связи может быть беспроводной антенной, как показано, портом проводной связи, портом оптической связи или любым другим проводным или беспроводным устройством, выполненным с возможностью взаимодействия с проводной или беспроводной средой 1500 электронной связи. Хотя фиг. 1 показывает интерфейс 1370 электронной связи, связывающимся через единственную линию связи, интерфейс связи может быть выполнен с возможностью связи через несколько линий связи. Хотя фиг. 1 показывает единственный интерфейс 1370 связи, транспортное средство может включать в себя любое количество интерфейсов связи.
[0043] Блок 1320 связи может быть выполнен с возможностью передачи или приема сигналов через проводную или беспроводную среду 1500 электронной связи, например, через интерфейс 1370 электронной связи. Хотя это явно не показано на фиг. 1, блок 1320 связи может быть выполнен с возможностью передачи, приема или и того, и другого через любую проводную или беспроводную среду связи, такую как радиочастотная (RF - radio frequency), ультрафиолетовая (UV - ultraviolet), видимого света, оптоволоконный кабель, линия проводной связи или их комбинация. Хотя на фиг.1 показан один блок 1320 связи и один интерфейс 1370 связи, может использоваться любое количество блоков связи и любое количество интерфейсов связи. Блок 1320 связи может включать в себя выделенный блок ближней связи (DSRC - dedicated short-range communications), бортовой блок (OBU - on-board unit) или их комбинацию.
[0044] Блок 1310 определения местоположения может определять информацию о геолокации, такую как долгота, широта, высота, направление передвижения или скорость транспортного средства 1000. Например, блок определения местоположения может включать в себя блок глобальной системы позиционирования (GPS - global positioning system), такой как блок Национальной ассоциации морской электроники (NMEA - National Marine -Electronics Association) с поддержкой широкозональной усиливающей системы (WAAS - Wide Area Augmentation System), блок радиотриангуляции или их комбинацию. Блок 1310 определения местоположения может использоваться для получения информации, которая представляет, например, текущий курс транспортного средства 1000, текущее положение транспортного средства 1000 в двух или трех измерениях, текущую угловую ориентацию транспортного средства 1000 или их комбинацию.
[0045] Пользовательский интерфейс 1350 может включать в себя любой блок, выполненный с возможностью взаимодействия с человеком, например виртуальную или физическую клавиатуру, сенсорную панель, дисплей, сенсорный дисплей, проекционный дисплей, виртуальный дисплей, дисплей дополненной реальности, тактильный дисплей, устройство отслеживания характеристик, такое как устройство отслеживания взгляда, динамик, микрофон, видеокамера, датчик, принтер или любая их комбинация. Пользовательский интерфейс 1350 может быть функционально связан с процессором 1330, как показано, или с любым другим элементом контроллера 1300. Хотя показан как единый блок, пользовательский интерфейс 1350 может включать в себя один или несколько физических блоков. Например, пользовательский интерфейс 1350 может включать в себя аудиоинтерфейс для выполнения аудиосвязи с человеком и сенсорный дисплей для выполнения визуальной и сенсорной связи с человеком. Пользовательский интерфейс 1350 может включать в себя множество дисплеев, таких как множество отдельных физически блоков, множество определенных частей в рамках одного физического блока или их комбинацию.
[0046] Датчик 1360 может включать в себя один или несколько датчиков, таких как массив датчиков, которые могут работать для обеспечения информации, которая может использоваться для управления транспортным средством. Датчики 1360 могут обеспечивать информацию о текущих рабочих характеристиках транспортного средства. Датчики 1360 могут включать в себя, например, датчик скорости, датчики ускорения, датчик угла поворота рулевого колеса, датчики сцепления, датчики торможения, датчики положения рулевого колеса, датчики отслеживания взгляда, датчики положения сиденья или любой датчик или комбинацию датчиков, которые могут сообщать информацию, касающуюся некоторых аспектов текущей динамической ситуации транспортного средства 1000.
[0047] Датчики 1360 могут включать в себя датчики, которые работают для получения информации о физической среде, окружающей транспортное средство 1000. Например, один или несколько датчиков могут определять геометрию дороги и препятствия, такие как неподвижные препятствия, транспортные средства и пешеходы. Датчики 1360 могут быть или включать в себя одну или несколько видеокамер, систем обнаружения лазера, систем обнаружения инфракрасного излучения, систем обнаружения звука или любого другого подходящего типа устройства обнаружения окружающей среды на транспортном средстве или комбинации устройств, известных в настоящее время или разработанных в будущем. В некоторых вариантах осуществления датчики 1360 и блок 1310 определения местоположения могут быть объединены.
[0048] Хотя он не показан отдельно, в некоторых вариантах осуществления транспортное средство 1000 может включать в себя контроллер траектории. Например, контроллер 1300 может включать в себя контроллер траектории. Контроллер траектории может работать для получения информации, описывающей текущее состояние транспортного средства 1000 и маршрута, запланированного для транспортного средства 1000, и на основе этой информации для определения и оптимизации траектории для транспортного средства 1000. Контроллер траектории может выводить сигналы, действующие для управления транспортным средством 1000, так что транспортное средство 1000 следует траектории, которая определяется посредством контроллера траектории. Например, выходной сигнал контроллера траектории может быть оптимизированной траекторией, которая может подаваться на трансмиссию 1200, колеса 1400 или и то, и другое. В некоторых вариантах осуществления оптимизированная траектория может быть входной информацией управления, такой как набор углов поворота, причем каждый угол поворота соответствует моменту времени или положению. В некоторых вариантах осуществления оптимизированная траектория может представлять собой один или несколько путей, линий, кривых или их комбинации.
[0049] Одно или более колес 1400 могут быть рулевым колесом, которое может поворачиваться на угол поворота под управлением блока 1230 рулевого управления, приводным колесом, которое может вращаться для приведения в движение транспортного средства 1000 под управлением трансмиссии 1220, или рулевым и приводным колесом, которое может управлять рулем и приводить в движение транспортное средство 1000.
[0050] Хотя это не показано на фиг. 1, транспортное средство может включать в себя блоки или элементы, не показанные на фиг. 1, такие как корпус, модуль Bluetooth®, радиоблок с частотной модуляцией (FM - frequency modulated), модуль связи ближнего радиуса действия (NFC - Near Field Communication), жидкокристаллический дисплей (LCD - liquid crystal display), устройство отображения на органических светодиодах (OLED - organic light-emitting diode), динамик или любую их комбинацию.
[0051] Транспортное средство 1000 может быть автономным транспортным средством. Автономным транспортным средством можно управлять автономно, без непосредственного вмешательства человека, для пересечения части транспортной сети транспортных средств. Хотя это не показано отдельно на фиг. 1, в некоторых реализациях автономное транспортное средство может включать в себя блок управления автономным транспортным средством, который может выполнять автономную маршрутизацию, навигацию и управление транспортным средством. В некоторых реализациях блок управления автономным транспортным средством может быть интегрирован с другим блоком транспортного средства. Например, контроллер 1300 может включать в себя блок управления автономным транспортным средством.
[0052] В некоторых реализациях блок управления автономным транспортным средством может управлять транспортным средством 1000 или эксплуатировать его для пересечения транспортной сети транспортных средств или ее части в соответствии с текущими эксплуатационными параметрами транспортного средства. В другом примере блок управления автономным транспортным средством может управлять транспортным средством 1000 или эксплуатировать его для выполнения определенной операции или маневра, такого как парковка транспортного средства. В другом примере блок управления автономным транспортным средством может формировать маршрут движения от пункта отправления, такого как текущее местоположение транспортного средства 1000, до пункта назначения на основе информации о транспортном средстве, информации об окружающей среде, информации транспортной сети транспортных средств, представляющей транспортную сеть транспортных средств, или их комбинации, и может управлять транспортным средством 1000 или эксплуатировать его для пересечения транспортной сети транспортных средств в соответствии с маршрутом. Например, блок управления автономным транспортным средством может выводить маршрут движения на контроллер траектории, который может управлять транспортным средством 1000 для перемещения от пункта отправления к пункту назначения, используя сформированный маршрут.
[0053] Фиг. 2 является схемой примера части транспортной системы связи транспортного средства, в которой могут быть реализованы раскрытые здесь аспекты, признаки и элементы. Транспортная система 2000 связи транспортного средства может включать в себя одно или несколько транспортных средств 2100/2110, таких как транспортное средство 1000, показанное на фиг. 1, которые могут перемещаться через одну или несколько частей одной или нескольких транспортных сетей 2200 транспортных средств и могут связываться через одну или несколько сетей 2300 электронной связи. Хотя это явно не показано на фиг. 2, транспортное средство может пересекать территорию, которая прямо или полностью не включена в транспортную сеть транспортных средств, например, зону бездорожья.
[0054] Сеть 2300 электронной связи может быть, например, системой множественного доступа и может обеспечивать связь, такую как голосовая связь, передача данных, видеосвязь, обмен сообщениями или их комбинацию, между транспортным средством 2100/2110 и одним или несколькими устройствами связи 2400. Например, транспортное средство 2100/2110 может принимать информацию, такую как информация, представляющая транспортную сеть 2200 транспортных средств, от устройства 2400 связи через сеть 2300 электронной связи.
[0055] Транспортное средство 2100/2110 может осуществлять связь через линию проводной связи (не показана), линию беспроводной связи 2310/2320/2370 или комбинацию любого количества линий проводной или беспроводной связи. Например, как показано, транспортное средство 2100/2110 может связываться через наземную линию 2310 беспроводной связи, через неназемную линию 2320 беспроводной связи или через их комбинацию. В некоторых реализациях наземная линия 2310 беспроводной связи может включать в себя канал Ethernet, последовательный канал, канал Bluetooth, инфракрасный (IR - infrared) канал, ультрафиолетовый (UV - ultraviolet ) канал или любой канал, выполненный сс возможностью обеспечения электронной связи.
[0056] Транспортное средство 2100/2110 может связываться с другим транспортным средством 2100/2110. Например, головное или подчиненное, транспортное средство 2100 может принимать одно или несколько автоматических сообщений между транспортными средствами, таких как базовое сообщение безопасности (BSM - basic safety message), от удаленного или целевого удаленного транспортного средства 2110 через линию прямой связи 2370, или через сеть 2300 электронной связи. Например, удаленное транспортное средство 2110 может транслировать сообщение головным транспортным средствам в пределах заданного диапазона широковещательной передачи, например 300 метров. В некоторых вариантах осуществления транспортное средство 2100 может принимать сообщение через третью сторону, такую как ретранслятор сигнала (не показан) или другое удаленное транспортное средство (не показано). В некоторых вариантах осуществления транспортное средство 2100/2110 может периодически передавать одно или несколько автоматических сообщений между транспортными средствами на основе, например, заданного интервала, такого как 100 миллисекунд.
[0057] Автоматические сообщения между транспортными средствами могут включать в себя информацию идентификации транспортного средства, информацию о геопространственном состоянии, такую как информацию о долготе, широте или высоте, информацию о точности геопространственного местоположения, информацию о кинематическом состоянии, такую как информацию об ускорении транспортного средства, информацию о скорости рыскания, информацию о скорости, информацию о курсе транспортного средства, информацию о состоянии тормозной системы, информацию о дроссельной заслонке, информацию об угле поворота рулевого колеса или информацию о маршруте транспортного средства, или информацию о состоянии работы транспортного средства, такую как информация о размере транспортного средства, информация о состоянии фар, информация о сигналах поворота, информация о состоянии дворников, информация о трансмиссии или любая другая информация, или комбинация информации, относящаяся к состоянию передающего транспортного средства. Например, информация о состоянии трансмиссии может указывать, находится ли трансмиссия передающего транспортного средства в нейтральном состоянии, припаркованном состоянии, состоянии прямого или обратного движения.
[0058] Транспортное средство 2100 может связываться с сетью 2300 электронной связи через точку 2330 доступа. Точка 2330 доступа, которая может включать в себя вычислительное устройство, может быть выполнена с возможностью связи с транспортным средством 2100, с сетью 2300 электронной связи, с одним или несколькими устройствами 2400 связи или с их комбинацией через линии 2310/2340 проводной или беспроводной связи. Например, точка 2330 доступа может быть базовой станцией, базовой приемопередающей станцией (BTS - base transceiver station), Node-B, усовершенствованным Node-B (eNode-B - enhanced Node-B), домашним Node-B (HNode-B - Home Node-B), беспроводным маршрутизатором, проводным маршрутизатором, сетевым концентратором, реле, сетевым коммутатором или любым подобным проводным или беспроводным устройством. Хотя точка доступа показана как единое целое, она может включать в себя любое количество взаимосвязанных элементов.
[0059] Транспортное средство 2100 может связываться с сетью 2300 электронной связи через спутник 2350 или другое неназемное устройство связи. Спутник 2350, который может включать в себя вычислительное устройство, может быть выполнен с возможностью связи с транспортным средством 2100, с сетью 2300 электронной связи, с одним или несколькими устройствами 2400 связи или с их комбинацией через одну или несколько линий 2320/2360 связи. Хотя спутник показан как единое целое, он может включать в себя любое количество взаимосвязанных элементов.
[0060] Сеть 2300 электронной связи может быть сетью любого типа, выполненной с возможностью передачи голоса, данных или любого другого типа электронной связи. Например, сеть 2300 электронной связи может включать в себя локальную сеть (LAN - local area network), глобальную сеть (WAN - wide area network), виртуальную частную сеть (VPN - virtual private network), мобильную или сотовую телефонную сеть, Интернет или любую другую систему электронной связи. Сеть 2300 электронной связи может использовать протокол связи, такой как протокол управления передачей (TCP - transmission control protocol), протокол пользовательских дейтаграмм (UDP - user datagram protocol), интернет-протокол (IP - internet protocol), транспортный протокол реального времени (RTP - real-time transport protocol), гипертекстовый транспортный протокол гипертекста (HTTP - HyperText Transport Protocol) или их комбинацию. Хотя сеть электронной связи показана как единый блок, она может включать в себя любое количество взаимосвязанных элементов.
[0061] Транспортное средство 2100 может идентифицировать часть или состояние транспортной сети 2200 транспортных средств. Например, транспортное средство может включать в себя один или несколько датчиков 2105 на транспортном средстве, таких как датчик 1360, показанный на фиг. 1, который может включать в себя датчик скорости, датчик скорости колес, камеру, гироскоп, оптический датчик, лазерный датчик, радиолокационный датчик, звуковой датчик или любой другой датчик или устройство или их комбинацию, выполненную с возможностью определения или идентификации части или состояния транспортной сети 2200 транспортных средств.
[0062] Транспортное средство 2100 может пересекать часть или части одной или нескольких транспортных сетей 2200 транспортных средств с использованием информации, передаваемой через сеть 2300 электронной связи, такой как информация, представляющая транспортную сеть 2200 транспортных средств, информация, идентифицированную посредством одного или нескольких датчиков 2105 на транспортном средстве, или их комбинации.
[0063] Хотя для простоты на фиг. 2 показано одно транспортное средство 2100, одна транспортная сеть 2200 транспортных средств, одна сеть 2300 электронной связи и одно устройство 2400 связи, может использоваться любое количество транспортных средств, сетей или вычислительных устройств. В некоторых вариантах осуществления транспортная система 2000 связи транспортного средства может включать в себя устройства, блоки или элементы, не показанные на фиг. 2. Хотя транспортное средство 2100 показано единым блоком, транспортное средство может включать в себя любое количество взаимосвязанных элементов.
[0064] Хотя показано, что транспортное средство 2100 связывается с устройством 2400 связи через сеть 2300 электронной связи, транспортное средство 2100 может связываться с устройством 2400 связи через любое количество линий прямой или непрямой связи. Например, транспортное средство 2100 может связываться с устройством 2400 связи через линию прямой связи, такую как канал связи Bluetooth.
[0065] Транспортное средство 2100/2210 может быть связано с объектом 2500/2510, таким как водитель, оператор или владелец транспортного средства. Объект 2500/2510, связанный с транспортным средством 2100/2110, может быть связан с одним или несколькими персональными электронными устройствами 2502/2504/2512/2514, такими как смартфон 2502/2512 или компьютер 2504/2514. Персональное электронное устройство 2502/2504/2512/2514 может связываться с соответствующим транспортным средством 2100/2110 через линию прямой или непрямой связи. Хотя один объект 2500/2510 показан как связанный с одним транспортным средством 2100/2110 на фиг. 2, любое количество транспортных средств может быть связано с одним объектом, и любое количество объектов может быть связано с одним транспортным средством.
[0066] Фиг. 3 является схемой части транспортной сети транспортных средств в соответствии с этим раскрытием. Транспортная сеть 3000 транспортных средств может включать в себя одну или несколько зон 3100, недоступных для навигации, таких как здание, одну или несколько зон, частично доступных для навигации, например зона 3200 для парковки, одну или несколько зон, доступных для навигации, например дороги 3300/3400, или их комбинацию. Автономное транспортное средство, такое как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение, может пересекать часть или части транспортной сети 3000 транспортных средств.
[0067] Транспортная сеть транспортных средств может включать в себя одно или несколько пересечений 3210 между одной или несколькими доступными для навигации или частично доступными для навигации зонами 3200/3300/3400. Например, часть транспортной сети транспортных средств, показанная на фиг. 3 включает в себя пересечение 3210 между парковкой 3200 и дорогой 3400. В некоторых вариантах осуществления парковочная зона 3200 может включать в себя парковочные места 3220.
[0068] Часть транспортной сети транспортных средств, такая как дорога 3300/3400, может включать в себя одну или несколько полос 3320/3340/3360/3420/3440 и может быть связана с одним или несколькими направлениями движения, которые указаны стрелками на фиг. 3.
[0069] Транспортная сеть транспортных средств или ее часть, такая как часть транспортной сети транспортных средств, показанная на фиг. 3, может быть представлена как информация транспортной сети транспортных средств. Например, информация транспортной сети транспортных средств может быть выражена как иерархия элементов, таких как элементы языка разметки, которые могут храниться в базе данных или файле. Для простоты на фигурах здесь изображена информация транспортной сети транспортных средств, представляющая части транспортной сети транспортных средств в виде диаграмм или карт; однако информация транспортной сети транспортных средств может быть выражена в любой используемой компьютером форме, выполненной с возможностью представления транспортной сети транспортных средств или ее части. Информация транспортной сети транспортных средств может включать в себя информацию управления транспортной сетью транспортных средств, такую как информация о направлении движения, информация об ограничении скорости, информация о платных дорогах, информация об уровне, такая как информация о наклоне или угле, информация о материале поверхности, эстетическая информацию или их комбинация.
[0070] Часть или комбинация частей транспортной сети транспортных средств может быть идентифицирована как интересующая точка или пункт назначения. Например, информация транспортной сети транспортных средств может идентифицировать здание, такое как зона 3100, недоступная для навигации, и прилегающая частично доступная для навигации парковочная зона 3200, как интересующую точку, автономное транспортное средство может идентифицировать интересующую точку как пункт назначения, а автономное транспортное средство транспортное средство может перемещаться из пункта отправления в пункт назначения, пересекая транспортную сеть транспортных средств. Хотя парковочная зона 3200, связанная с зоной 3100, недоступной для навигации, показана смежной с зоной 3100, недоступной для навигации, на фиг. 3, пункт назначения может включать в себя, например, здание и парковочную зону, которая физически или географически не прилегает к зданию.
[0071] Идентификация пункта назначения может включать в себя определение местоположения пункта назначения, которое может быть дискретной, однозначно идентифицируемой геолокацией. Например, транспортная сеть транспортных средств может включать в себя заданное местоположение, такое как адрес с указанием улицы и номера дома, почтовый адрес, адрес транспортной сети транспортных средств, адрес GPS или их комбинацию для пункта назначения.
[0072] Пункт назначения может быть связан с одним или несколькими въездами, такими как въезд 3500, показанный на фиг. 3. Информация транспортной сети транспортных средств может включать в себя определенную информацию о местоположении въезда, такую как информация, идентифицирующая геолокацию въезда, связанного с пунктом назначения. Прогнозируемая информация о местоположении въезда может быть определена, как описано здесь.
[0073] Транспортная сеть транспортных средств может быть связана с пешеходной транспортной сетью или может включать в себя ее. Например, фиг. 3 включает в себя часть 3600 пешеходной транспортной сети, которая может быть пешеходной дорожкой. Пешеходная транспортная сеть или ее часть, такая как часть 3600 пешеходной транспортной сети, показанная на фиг. 3, может быть представлена как информация пешеходной транспортной сети. Информация транспортной сети транспортных средств может включать в себя информацию пешеходной транспортной сети. Пешеходная транспортная сеть может включать в себя пешеходные зоны, доступные для навигации. Пешеходная зона, доступная для навигации, такая как пешеходная дорожка или тротуар, может соответствовать зоне, недоступной для навигации в транспортной сети транспортных средств. Хотя это не показано отдельно на фиг. 3, пешеходная зона, доступная для навигации, такая как пешеходный переход, может соответствовать зоне, доступной для навигации, или частично доступной для навигации зоне транспортной сети транспортных средств.
[0074] Пункт назначения может быть связан с одним или несколькими местами остановки, такими как место 3700 остановки, показанное на фиг. 3. Место 3700 остановки может быть специально отведенным или неотведенным местом или зоной в непосредственной близости от пункта назначения, в котором автономное транспортное средство может остановиться, встать или припарковаться, так что могут выполняться операции при остановке, такие как посадка или высадка пассажиров.
[0075] Информация транспортной сети транспортных средств может включать в себя информацию о месте остановки, такую как информацию, идентифицирующую геолокацию одного или более мест 3700 остановки, связанных с пунктом назначения. Информация о месте остановки может быть заданной информацией о месте остановки, которая может быть информацией о месте остановки, вручную включенной в информацию транспортной сети транспортных средств. Например, заданная информация о месте остановки может быть включена в информацию транспортной сети транспортных средств на основе ввода пользователя. Информация о месте остановки может быть автоматически сформированной информацией о месте остановки, как описано здесь. Хотя это не показано отдельно на фиг. 3, информация о месте остановки может идентифицировать тип операции остановки, связанной с местом 3700 остановки. Например, пункт назначения может быть связан с первым местом остановки для посадки пассажиров и вторым местом остановки для высадки пассажиров. Хотя автономное транспортное средство может парковаться в месте остановки, место остановки, связанное с пунктом назначения, может быть независимым и отличным от зоны парковки, связанной с пунктом назначения.
[0076] В одном из примеров автономное транспортное средство может идентифицировать интересующую точку, которая может включать в себя недоступную для навигации зону 3100, зону 3200 парковки и въезд 3500 в качестве пункта назначения. Автономное транспортное средство может идентифицировать зону 3100, недоступную для навигации, или въезд 3500, в качестве первичного пункта назначения для интересующей точки, и может идентифицировать зону 3200 парковки в качестве вторичного пункта назначения. Автономное транспортное средство может идентифицировать место 3700 остановки как место остановки для первичного пункта назначения. Автономное транспортное средство может формировать маршрут от пункта отправления(не показан) до места 3700 остановки. Автономное транспортное средство может пересекать транспортную сеть транспортных средств от пункта отправления до места остановки 3700, используя маршрут. Автономное транспортное средство может остановиться или припарковаться в месте 3700 остановки, так что может выполняться посадка или высадка пассажиров. Автономное транспортное средство может формировать последующий маршрут от места 3700 остановки до зоны 3200 парковки, может пересекать транспортную сеть транспортных средств от места 3700 остановки до зоны 3200 парковки, используя последующий маршрут, и может парковаться в зоне 3200 парковки.
[0077] Фиг. 4 - схема примера интерактивной внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением в соответствии с реализациями этого раскрытия. Интерактивная внешняя связь транспортного средства с пользователем с интегрированным семиотическим управлением 4000 может быть реализована в транспортном средстве, таком как транспортное средство 1000, показанное на фиг. 1, или одно из транспортных средств 2100/2110, показанных на фиг. 2, которое может быть автономным транспортным средством, полуавтономным транспортным средством или любым другим транспортным средством, реализующим автономное вождение.
[0078] Транспортное средство, такое как автономное транспортное средство, может пересекать транспортную сеть транспортных средств или ее часть, такую как транспортная сеть 3000 транспортных средств, показанная на фиг. 3, которая может включать в себя пересечение различных сценариев работы транспортного средства. Отдельный сценарий работы транспортного средства может включать в себя любой четко идентифицируемый набор условий работы, которые могут повлиять на работу транспортного средства в заданной пространственно-временной области или среде работы транспортного средства, например, в пределах заданного расстояния работы от текущего пространственно-временного местоположения транспортного средства, например, в пределах 1500 метров от текущего геопространственного местоположения транспортного средства или в пределах 30 секунд от текущего временного местоположения транспортного средства.
[0079] Например, отдельный сценарий работы транспортного средства может быть основан на количестве дорог, сегментов дороги или полос, которые транспортное средство может пересекать в пределах заданного пространственно-временного расстояния. В другом примере отдельный сценарий работы транспортного средства может быть основан на одном или нескольких устройствах управления движением, которые могут влиять на работу транспортного средства в заданной пространственно-временной области или среде работы транспортного средства. В другом примере отдельный сценарий работы транспортного средства может быть основан на одном или нескольких идентифицируемых правилах, положениях или законах, которые могут влиять на работу транспортного средства в заданной пространственно-временной области или среде работы транспортного средства. В другом примере отдельный сценарий работы транспортного средства может быть основан на одном или нескольких идентифицируемых внешних объектах, которые могут влиять на работу транспортного средства в заданной пространственно-временной области или среде работы транспортного средства.
[0080] Примеры отдельных сценариев работы транспортного средства включают в себя отдельный сценарий работы транспортного средства, в котором транспортное средство пересекает перекресток; отдельный сценарий работы транспортного средства, в котором пешеход пересекает ожидаемый путь транспортного средства или приближается к нему; и отдельный сценарий работы транспортного средства, в котором транспортное средство меняет полосу движения. Могут использоваться другие отдельные сценарии работы транспортного средства.
[0081] Аспекты среды работы транспортного средства могут быть представлены в рамках соответствующих различных сценариев работы транспортного средства. Например, относительная ориентация, состояние работы, траектория, ожидаемый путь или любая другая информация или комбинация информации, описывающая один или несколько внешних объектов, могут быть представлены в рамках соответствующих отдельных сценариев работы транспортного средства. В другом примере относительная геометрия транспортной сети транспортных средств может быть представлена в рамках соответствующих различных сценариев работы транспортного средства.
[0082] Интерактивная внешняя связь транспортного средства с пользователем с интегрированным семиотическим управлением 4000 может включать в себя идентификацию информации о среде работы на этапе 4100, определение действия управления транспортным средством на этапе 4200, идентификацию информации о модификации управления транспортным средством на этапе 4300, идентификацию информации управления транспортным средством на этапе 4400, управление транспортным средством для пересечения транспортной сети транспортных средств или ее части на этапе 4500 или их комбинацию.
[0083] Информация о среде работы, представляющая среду работы транспортного средства, может быть идентифицирована на этапе 4100. Идентификация информации о среде работы на этапе 4100 может включать в себя прием, идентификацию или иной доступ к информации о среде работы, представляющей среду работы для транспортного средства, такую как текущая среда работы или ожидаемая среда работы, или один или несколько их аспектов. Среда работы транспортного средства может включать в себя отчетливо идентифицируемый набор условий работы, которые могут влиять на работу транспортного средства в заданной пространственно-временной области транспортного средства. Информация о среде работы может быть идентифицирована на основе информации датчиков, информации, принятой от внешнего источника, любого другого источника данных или их комбинации, если явно не указано в данном документе, или иным образом однозначно не ясно из контекста.
[0084] Идентификация информации о среде работы может соответствовать определению отдельного сценария работы транспортного средства. Идентификация информации о среде работы может включать в себя идентификацию информации о среде работы в соответствии с одной или несколькими группами, типами или категориями информации о среде работы. Например, идентификация информации о среде работы может включать в себя определение эмпирической информации, представляющей естественный или искусственный аспект среды работы, идентификацию информации транспортной сети транспортных средств, представляющей заданный аспект транспортной сети транспортных средств в среде работы, идентификацию информации о внешних объектах, представляющей внешний объект в текущей среде работы, идентификацию информации о внешней деятельности, представляющую внешнюю деятельность для текущей среды работы, или идентификацию информации о транспортном средстве, которая может включать в себя информацию конфигурации транспортного средства, такую как информация конфигурации пользователя. Могут использоваться другие категории или категоризации информации, представляющей среду работы транспортного средства.
[0085] Для простоты и ясности элементы информации о среде работы могут быть описаны здесь с использованием определяющей терминологии или терминологии относительности. Например, эмпирическая информация может быть описана здесь как указывающая на то, что погодные условия сухие. Однако значения информации о среде работы могут быть логическими значениями, такими как логическое значение, указывающее, что соответствующий показатель для соответствующего аспекта среды работы превышает заданное соответствующее пороговое значение или отличается от заданного соответствующего диапазона или числовых значений, таких как значение, указывающее заданную категорию для соответствующего аспекта среды работы, или значение, указывающее измерение или уровень для соответствующего аспекта среды работы. Идентификация информации о среде работы может включать в себя оценку, обработку или иное определение соответствия между, например, измерением для соответствующего аспекта среды работы и соответствующим логическим значением, например, посредством определения того, превышает ли измерение заданное пороговое значение.
[0086] Эмпирическая информация может представлять естественный или искусственный аспект или состояние среды работы, которое может быть идентифицировано, определено, спрогнозировано или выведено на основе информации датчика, сформированной посредством датчика транспортного средства, например временной аспект, аспект освещения рабочей среды, связанный с погодой аспект рабочей среды, состояние поверхности дороги в рабочей среде или любое другое естественное или искусственное состояние, которое может повлиять на работу транспортного средства в среде работы. Эмпирическая информация может быть определена на основе комбинации информации датчика и другой информации.
[0087] Например, датчик транспортного средства может быть датчиком внешней освещенности, и идентификация эмпирической информации может включать в себя идентификацию эмпирической информации в ответ на информацию об уровне внешней освещенности, определенную посредством датчика внешней освещенности. В некоторых вариантах осуществления уровень окружающего освещения может превышать заданное пороговое значение дневного света, и эмпирическая информация может указывать дневное или светлое состояние среды работы. В некоторых вариантах осуществления уровень окружающего освещения может быть в пределах, например равным или меньшим заданного порогового значения дневного света, и эмпирическая информация может указывать на ночное или темное состояние среды работы.
[0088] В некоторых вариантах осуществления некоторая эмпирическая информация может быть недоступна, и может использоваться заданная или ожидаемая эмпирическая информация. Например, текущая информация о погоде может быть недоступна, и заданное ожидаемое значение, такое как ясно или сухо, может использоваться в качестве эмпирической информации о погоде.
[0089] Информация транспортной сети транспортных средств может представлять заданный аспект транспортной сети транспортных средств в среде работы. Информация транспортной сети транспортных средств может включать в себя информацию, представляющую транспортную сеть транспортных средств, близкую к транспортному средству, например, в пределах заданного пространственного расстояния от транспортного средства, например 1500 метров, которая может включать в себя информацию, указывающую геометрию одного или нескольких аспектов транспортной сети транспортных средств, информацию, указывающую состояние, такое как состояние поверхности, транспортной сети транспортных средств или любую их комбинацию. Например, информация транспортной сети транспортных средств, идентифицированная на этапе 4100, может быть аналогична информации транспортной сети транспортных средств, описанной со ссылкой на фиг. 3.
[0090] Информация транспортной сети транспортных средств может указывать размер, конфигурацию или геометрию проезжей части, ограничение скорости или другой доступ к транспортной сети транспортных средств, использовать правила или стандарты, тип перекрестка, устройство управления движением, тип географической зоны, например жилая или коммерческая, материал дороги или поверхности, зонирование, информацию о погоде, принятую от внешнего источника, или любую другую заданную информацию транспортной сети транспортных средств, которая может повлиять на работу транспортного средства в среде работы.
[0091] Информация транспортной сети транспортных средств может указывать на то, что среда работы включает в себя или находится в заданной близости от заданного места, такого как школа, больница, бар, музей, парк, железная дорога, железнодорожная станция или заданный тип местоположения, такой как жилой район или область, городской район, коммерческий район, сельская местность, промышленный район, район шоссе или любое другое заданное местоположение или тип местоположения, которые могут повлиять на работу транспортного средства в пределах среды работы.
[0092] В другом примере информация транспортной сети транспортных средств может включать в себя принятую заданную информацию, такую как информация о погоде, принятая из внешнего источника, которая может указывать на погодные условия среды работы, такие как дождь, снег, туман или любые другие погодные условия, или комбинацию условий, которые могут повлиять на работу транспортного средства в среде работы. Например, информация транспортной сети транспортных средств может указывать на то, что вероятность обледенения дороги превышает заданное пороговое значение. В другом примере информация транспортной сети транспортных средств может указывать количество осадков или интенсивность осадков, или любую другую информацию транспортной сети транспортных средств, которая может повлиять на работу транспортного средства в среде работы.
[0093] В некоторых вариантах осуществления некоторая информация транспортной сети транспортных средств, такая как информация транспортной сети транспортных средств, основанная на сохраненной информации транспортной сети транспортных средств, может быть недоступна, и может использоваться заданная или ожидаемая информация транспортной сети транспортных средств. Например, информация транспортной сети транспортных средств, указывающая количество полос для текущей части транспортной сети транспортных средств, может быть недоступна, и заданное ожидаемое значение одной полосы движения может использоваться в качестве информации транспортной сети транспортных средств. В некоторых вариантах осуществления информация транспортной сети транспортных средств может быть сформирована на основе информации датчика.
[0094] Информация о внешних объектах может представлять внешний объект в текущей среде работы. Например, информация о внешних объектах может представлять внешние объекты в среде работы транспортного средства, такие как участники дорожного движения, пешеходы, животные, не являющиеся людьми, немоторизованные устройства, такие как велосипеды или скейтборды, моторизованные устройства, такие как удаленные транспортные средства, или любой другой внешний объект, препятствие, сущность или их комбинация, которые могут повлиять на работу транспортного средства в среде работы. Внешние объекты могут быть идентифицированы на основе, например, заданной информации, такой как информация, принятая от удаленного транспортного средства, или на основе данных датчика, сообщаемых посредством датчика транспортного средства.
[0095] Соответствующий внешний объект может быть внешним объектом, ориентированным по отношению к транспортному средству таким образом, что на пересечение части текущей среды работы посредством внешнего объекта, или любую другую операцию внешнего объекта, которая может повлиять на пересечение любого объекта, который может включать в себя текущее транспортное средство, в текущей среде работы, может влиять управление транспортным средством для пересечения части транспортной сети транспортных средств в соответствии с информацией управления транспортным средством, так что управление транспортным средством для пересечения части транспортной сети транспортных средств в соответствии с информация управления транспортным средством включает в себя вывод семиотического представления информации управления транспортным средством.
[0096] Информация о внешних объектах может включать в себя совокупную информацию, такую как информация, указывающая количество внешних объектов в среде работы, или может указывать состояние внешнего объекта для среды работы, такое как оживленный или безлюдный. Информация о внешних объектах может включать в себя для соответствующего внешнего объекта информацию о местоположении, кинетику, скорость или движение, или предстоящую или ожидаемую кинетику, скорость или движение, информацию, информацию об ожидаемом пути, информацию, указывающую, является ли внешний объект блокирующим объектом, который может помешать транспортному средству или другому внешнему объекту пересечь текущее или ожидаемое местоположение блокирующего внешнего объекта, неблокирующего объекта, который может препятствовать движению транспортного средства и может позволить некоторым или всем другим внешним объектам пересекать текущее или ожидаемое местоположение неблокирующего внешнего объекта или любую другую информацию о внешних объектах, которая может повлиять на работу транспортного средства в среде работы.
[0097] В некоторых вариантах осуществления некоторая информация о внешних объектах, такая как информация о внешних объектах на основе информации датчиков или информация о внешних объектах на основе принятой информации, может быть недоступна, и может использоваться заданная или ожидаемая информация о внешних объектах. Например, информация датчика, указывающая внешние объекты, может быть недоступна, и заданное ожидаемое значение, указывающее отсутствие внешних объектов, может использоваться в качестве информации о внешних объектах.
[0098] Информация о внешней деятельности может представлять собой внешнюю деятельность или событие, или предстоящую или ожидаемую внешнюю деятельность или событие для текущей среды работы. Информация о внешней деятельности может быть независимой от отдельных внешних объектов или может быть идентифицирована независимо от идентификации внешних объектов. Информация о внешней деятельности может быть идентифицирована на основе принятой информации о деятельности, такой как информация, идентифицированная на основе данных социальных сетей, которые могут включать в себя совокупные данные социальных сетей, такие как данные, указывающие совокупное количество публикаций в социальных сетях, географически и временно близких к среде работы или связанных с заданным использованием области, географически и временно близкой к среде работы. Например, информация о внешней деятельности может указывать на то, что событие, такое как спортивное мероприятие, концерт, митинг, парад и т.п., пространственно и временно близко к среде работы или другая социальная деятельность, такая как высокая плотность человеческой деятельности или любая другая деятельность или событие, которые могут повлиять на работу транспортного средства в среде работы.
[0099] Информация о внешней деятельности может указывать состояние, насыщенное событиями, которое может указывать внешнюю деятельность или событие, или предстоящую или ожидаемую внешнюю деятельность или событие, географически и временно близкое к среде работы. Информация о внешней деятельности может указывать состояние без событий, которое может указывать отсутствие какой-либо идентифицированной внешней деятельности или события, или предстоящую или ожидаемую внешнюю деятельность или событие, географически и временно близкое к среде работы. В некоторых вариантах осуществления информация о внешней деятельности может включать в себя информацию, указывающую другие аспекты внешней деятельности, такие как тип деятельности, масштаб деятельности и т.п.
[0100] В некоторых вариантах осуществления некоторая информация о внешней деятельности, такая как информация о внешней деятельности на основе информации датчика или информация о внешней деятельности на основе принятой информации, может быть недоступна, и может использоваться заданная или ожидаемая информация о внешней деятельности. Например, принятая информация, указывающая внешние действия, может быть недоступна, и заданное ожидаемое значение, указывающее на отсутствие внешних действий, может использоваться в качестве информации о внешней деятельности.
[0101] Информация конфигурации пользователя может включать в себя, например, информацию, указывающую приоритет оптимизации управления транспортным средством для одного или нескольких пользователей транспортного средства. Информация конфигурации пользователя может быть определена пользователем, например информация, идентифицированная или сохраненная в ответ на ввод данных пользователем, указывающий конфигурацию пользователя. Информация конфигурации пользователя может быть автоматически идентифицирована информацией конфигурации, такой как информация, идентифицированная на основе шаблонов использования.
[0102] Например, низкий приоритет оптимизации управления транспортным средством может указывать на предпочтение пользователя в отношении более низких скоростей ускорения, более длительного времени реализации, более длительного времени сигнализации и т.п., а высокий приоритет оптимизации управления транспортным средством может указывать на предпочтение пользователя минимизировать время вождения, например посредством минимизации времени реализации, сведения к минимуму времени сигнализации и увеличения показателей ускорения и замедления.
[0103] В некоторых вариантах осуществления информация конфигурации пользователя может включать в себя информацию, соответствующую заданным аспектам работы транспортного средства, например информацию, соответствующую соответствующим действиям управления транспортным средством, сценариям работы транспортного средства или их комбинациям.
[0104] В некоторых вариантах осуществления некоторая информация конфигурации пользователя, такая как информация конфигурации пользователя на основе ввода пользователя или автоматически сформированная информация конфигурации пользователя, может быть недоступна, и может использоваться заданная или ожидаемая информация конфигурации пользователя. Например, информация, вводимая пользователем, указывающая конфигурацию пользователя, может быть недоступна, и заданное ожидаемое значение для конфигурации пользователя может использоваться в качестве информации конфигурации пользователя.
[0105] Информация о среде работы может включать в себя информацию о состоянии транспортного средства для транспортного средства, такую как информация, указывающая геопространственное местоположение транспортного средства, информация, соотносящая геопространственное местоположение транспортного средства с информацией транспортной сети транспортных средств, маршрут транспортного средства, скорость транспортного средства, состояние ускорения транспортного средства, другая информация о направлении транспортного средства, движении или кинетическом состоянии, информация о пассажирах транспортного средства или любая другая информация о транспортном средстве или работы транспортного средства.
[0106] В некоторых вариантах осуществления идентификация информации о среде работы, представляющей среду работы транспортного средства на этапе 4100, может включать в себя мониторинг среды работы транспортного средства или ее заданных аспектов или прием информации о среде работы от другой системы, устройства или блока транспортного средства для мониторинга среды работы транспортного средства, такого как монитор среды работы транспортного средства.
[0107] Мониторинг среды работы транспортного средства может включать в себя идентификацию и отслеживание одного или нескольких аспектов или состояний среды работы, таких как внешние объекты, идентификацию отдельных сценариев работы транспортного средства или их комбинацию. Идентификация и отслеживание внешних объектов может включать в себя определение пространственно-временного местоположения соответствующих внешних объектов, которые могут относиться к транспортному средству, идентификацию (например, как описано в отношении гипотез объектов ниже) одного или нескольких ожидаемых путей для соответствующих внешних объектов, которая может включать в себя определение скорости, траектории или и того, и другого для внешнего объекта.
[0108] Для простоты и ясности описания местоположений, ожидаемых местоположений, путей, ожидаемых маршрутов и т.п. в данном документе могут быть опущены явные указания на то, что соответствующие местоположения и пути относятся к геопространственным и временным компонентам; однако, если явно не указано в данном документе или иным образом однозначно не ясно из контекста, местоположения, ожидаемые местоположения, пути, ожидаемые пути и т.п., описанные здесь, могут включать в себя геопространственные компоненты, временные компоненты или и то, и другое.
[0109] Идентификация информации о среде работы может включать в себя идентификацию информации о среде работы согласно множеству аспектов в категории информации о среде работы. Например, идентификация информации о среде работы может включать в себя идентификацию эмпирической информации, представляющей состояние освещения, и идентификацию эмпирической информации, представляющей состояние осадков.
[0110] Действие управления транспортным средством может быть идентифицировано на этапе 4200. Действие управления транспортным средством может указывать операцию управления транспортным средством или маневр, например, ускорение, замедление, поворот, остановку или любую другую операцию транспортного средства или комбинацию операций транспортного средства, которые могут выполняться транспортным средством в сочетании с пересечением части транспортной сети транспортных средств, такой как текущая часть транспортной сети транспортных средств, которая может быть частью транспортной сети транспортных средств в среде работы транспортного средства.
[0111] Действие управления транспортным средством может быть несемиотическим действием управления транспортным средством. Несемиотическое действие управления транспортным средством может быть действием управления транспортным средством для пересечения транспортной сети транспортных средств или ее части, или иного управления или работы транспортного средства независимо от управления или работы транспортного средства для вывода соответствующего или связанного семиотического представления.
[0112] Действие управления транспортным средством может быть принято от другой системы, устройства или блока транспортного средства, такого как блок управления маршрутизацией и навигацией транспортного средства или автономный контроллер управления операциями транспортного средства. В примере действие управления транспортным средством может быть принято в соответствии с траекторией, определенной (например, вычисленной) для транспортного средства. Траектория может быть определена посредством планировщика траектории, такого как планировщик траектории, описанный со ссылкой на фиг. 5.
[0113] Например, действие управления транспортным средством может быть действием «Стоп» управления транспортным средством для управления транспортным средством для пересечения транспортной сети транспортных средств или ее части посредством управления устройством ускорения, тормозным устройством, другим блоком управления скоростью или комбинацией блоков управления скоростью для остановки транспортного средства или иным образом управления транспортным средством, чтобы оно стало или оставалось неподвижным.
[0114] Действие управления транспортным средством может быть действием «Уступить дорогу» управления транспортным средством для управления транспортным средством для пересечения транспортной сети транспортных средств или ее части посредством управления устройством ускорения, тормозным устройством, другим блоком управления скоростью или комбинацией блоков управления скоростью для замедления транспортного средства или иным образом управления транспортным средством, чтобы оно двигалось со скоростью в пределах заданного порогового значения или диапазона, который может быть ниже или в пределах заданного установленного законом ограничения скорости.
[0115] Действие управления транспортным средством может быть действием «Вперед» управления транспортным средством для управления транспортным средством для пересечения транспортной сети транспортных средств или ее части посредством медленного движения вперед на короткое расстояние, такое как несколько дюймов или фут.
[0116] Действие управления транспортным средством может быть действием «Ускорение» управления транспортным средством для управления транспортным средством для пересечения транспортной сети транспортных средств или ее части посредством ускорения с заданной скоростью ускорения или со скоростью ускорения в пределах заданного диапазона. Хотя некоторые операции управления транспортным средством, такие как ускорение и замедление, описаны здесь как имеющие значение или скорость для простоты, операции управления транспортным средством могут быть связаны с переменными значениями или скоростями, такими как скорости вдоль кривой или последовательность скоростей.
[0117] Действие управления транспортным средством может быть действием «Замедление» управления транспортным средством для управления транспортным средством для пересечения транспортной сети транспортных средств или ее части посредством замедления с заданной скоростью замедления или со скоростью замедления в пределах заданного диапазона.
[0118] Действие управления транспортным средством может быть действием «Поддерживать» управления транспортным средством для управления транспортным средством для пересечения транспортной сети транспортных средств или ее части в соответствии с текущими эксплуатационными параметрами, например, посредством поддержания текущей скорости, поддержания текущего пути или маршрута, поддержания текущей ориентации полосы движения и т.п.
[0119] Действие управления транспортным средством может быть действием «Продолжить» управления транспортным средством для управления транспортным средством для пересечения транспортной сети транспортных средств или ее части посредством начала или возобновления ранее идентифицированного набора рабочих параметров, которые могут включать в себя управление транспортным для пересечения транспортной сети транспортных средств или ее части в соответствии с одним или несколькими другими действиями управления транспортным средством. Например, транспортное средство может быть неподвижным на перекрестке, идентифицированный маршрут для транспортного средства может включать в себя пересечение перекрестка, а управление транспортным средством в соответствии с действием «Продолжить» управления транспортным средством может включать в себя управление транспортным средством для ускорения с заданной скоростью ускорения до заданной скорости вдоль идентифицированного пути. В другом примере транспортное средство может пересекать часть транспортной сети транспортных средств с заданной скоростью, для транспортного средства может быть идентифицирована смена полосы движения, и управление транспортным средством в соответствии с действием «Продолжить» управления транспортным средством может включать в себя управление транспортным средством для выполнения последовательности корректировок траектории в соответствии с заданными параметрами смены полосы движения, так что транспортное средство выполняет идентифицированную операцию смены полосы движения.
[0120] В некоторых вариантах осуществления действие управления транспортным средством может включать в себя или может быть связано с одним или несколькими эксплуатационными параметрами. Параметр рабочих характеристик может указывать значение или диапазон значений для управления одним или несколькими эксплуатационными элементами или эксплуатационными элементами управления транспортного средства, например, для пересечения транспортной сети транспортных средств или ее части. Рабочие элементы транспортного средства могут включать в себя системы, устройства или блоки для управления скоростью транспортного средства или другим кинетическим состоянием транспортного средства, состоянием работы вывода семиотического представления транспортного средства или любым другим состоянием работы или комбинацией состояний работы транспортного средства, которые могут управляться автономно или полуавтономно, которые могут включать в себя элементы управления внутренней температурой, элементы управления мультимедийной системой, элементы управления окнами и т.п.
[0121] Например, действие «Стоп» управления транспортным средством может включать в себя или может быть связано с параметром рабочих характеристик, указывающим скорость замедления. В другом примере рабочие параметры, заданные для, указываемые или связанные с действием «Продолжить» управления транспортным средством, могут указывать информацию о маршруте или пути, информацию о скорости, скорость ускорения или их комбинацию, или могут прямо или неявно указывать, что текущий или ранее идентифицированный путь, скорость, скорость ускорения или их комбинация могут поддерживаться.
[0122] В некоторых вариантах осуществления действие управления транспортным средством может быть составным действием управления транспортным средством, которое может включать в себя последовательность, комбинацию или и то, и другое действий управления транспортным средством. Например, действие «Вперед» управления транспортным средством может указывать действие «Стоп» управления транспортным средством, последующее действие «Ускорение» управления транспортным средством, связанное с заданной скоростью ускорения, и последующее действие «Стоп управления транспортным средством», связанное с заданной скоростью замедления, так что управление транспортным средством в соответствии с действием «Вперед» управления транспортным средством включает в себя управление транспортным средством для его медленного продвижения вперед на короткое расстояние, например, несколько дюймов или фут.
[0123] Идентификация действия управления транспортным средством на этапе 4200 может включать в себя идентификацию первичной основы управления транспортным средством. Например, действие управления транспортным средством и первичная основа управления транспортным средством могут быть приняты от другой системы, устройства или блока транспортного средства, такого как блок управления маршрутизацией и навигацией транспортного средства или автономный контроллер управления работой транспортного средства для транспортного средства.
[0124] Первичная основа управления транспортным средством может указывать основу, причину или обоснование действия управления транспортным средством. Например, действие управления транспортным средством может быть идентифицировано на основе нескольких показателей управления транспортным средством, каждый показатель управления транспортным средством может быть связан с показателем значимости, таким как показатель неизбежности, показатель срочности, вес или их комбинация, и показатель управления транспортным средством или комбинация показателей, имеющих наибольшее или наиболее важное значение значимости, может быть определена как первичная основа управления транспортным средством.
[0125] Информация о модификации управления транспортным средством может быть идентифицирована на этапе 4300. Информация о модификации управления транспортным средством может указывать один или несколько параметров модификации управления транспортным средством или модификаторы управления транспортным средством для управления или модификации управления транспортным средством для пересечения транспортной сети транспортных средств или ее части, так что пересечение транспортной сети транспортных средств или ее части включает в себя вывод семиотического представления информации управления транспортным средством, которая может включать в себя управление транспортным средством, чтобы оно стало или оставалось неподвижным, например, в течение заданного периода времени. Например, параметр модификации управления транспортным средством может быть объединен или может заменить параметр рабочих характеристик, связанный с действием управления транспортным средством для управления транспортным средством в соответствии с действием управления транспортным средством.
[0126] Каждый модификатор управления транспортным средством может соответствовать соответствующему рабочему элементу для управления транспортным средством. Значение, соответствующее соответствующему модификатору управления транспортным средством, может использоваться для управления или для модификации управления соответствующего рабочего элемента для управления транспортным средством. Например, действие управления транспортным средством, идентифицированное на этапе 4200, может включать в себя или может быть связано с одним или несколькими рабочими параметрами, а информация о модификации управления транспортным средством, идентифицированная на этапе 4300, может включать в себя один или несколько модификаторов управления транспортным средством для управления или модификации соответствующих рабочих параметров.
[0127] Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию таблицы модификации управления транспортным средством на основе информации о среде работы, представляющей среду работы транспортного средства, идентифицированной на этапе 4100, действия управления транспортным средством, идентифицированного на этапе 4200, или обоих.
[0128] Например, информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя эмпирическую информацию, указывающую, что погодные условия или условия дорожного покрытия, или и то, и другое, для среды работы являются сухими, эмпирическую информацию, указывающую, что условия освещения, такие как условия окружающего освещения для среды работы темные, информацию транспортной сети транспортных средств, указывающую, что жилой квартал или район географически и временно близок к среде работы, информацию о внешних объектах, указывающую на отсутствие внешних объектов в текущей среде работы, информацию о внешней деятельности указывающий на отсутствие внешней деятельности для текущей среды работы, и информацию конфигурации пользователя, указывающую предпочтение минимизации времени вождения, а таблица модификации управления транспортным средством может быть идентифицирована на основе комбинации информации о среде работы (сухая, темная, жилая, безлюдная, без событий, высокий приоритет оптимизации управления транспортным средством), как показано в таблице 1.
обнаружении другого участника дорожного движения
[Таблица 1]
[0129] В таблице 1 параметр «Яркость» имеет значение «60%», указывающее, что светоотдачей одного или нескольких освещенных элементов транспортного средства, таких как фары, задние фонари, индикаторы поворота или другие блоки внешнего светового представления транспортного средства, можно управлять для вывода света на 60% от максимальной мощности для пересечения транспортной сети транспортных средств или ее части. Могут использоваться другие значения.
[0130] В таблице 1 параметр «Частота мигания» имеет значение «1 Гц», указывающее на то, что световой поток одного или нескольких освещенных элементов транспортного средства может периодически модулироваться с частотой 1 Гц для пересечения транспортной сети транспортных средств или его части. Могут использоваться другие значения.
[0131] В таблице 1 параметр «Скорость прокрутки» имеет значение «5 футов/с», указывающее, что вывод семиотического представления или его части с использованием блока внешнего светового представления можно прокручивать или иным образом перемещать в заданном направлении с заданной скоростью пять футов в секунду для пересечения транспортной сети транспортных средств или ее части. Могут использоваться другие значения. Может быть указано другое движение или анимация семиотического представления.
[0132] Параметр «Пороговое значение остановки» имеет значение «1 миля/час», указывающее максимальную скорость в одну милю в час, которая может быть идентифицирована как соответствующая состоянию остановки. Могут использоваться другие значения.
[0133] Параметр «Состояния для отображения» имеет значение «Уступить дорогу», «Остановка», «Предстоит ускорение», указывающее состояния управления транспортным средством, для которых может быть выведено семиотическое представление для пересечения транспортной сети транспортных средств или ее части. Могут использоваться другие значения.
[0134] Параметр «Время опережения для отображения предстоящего ускорения» имеет значение «0,1 с», указывающее время опережения или временной период в одну десятую секунды для вывода семиотического представления ожидаемого или предстоящего оперативного маневра, такого как изменение скорости, для пересечения транспортной сети транспортных средств или ее части перед выполнением соответствующего оперативного маневра. Могут использоваться другие значения.
[0135] Параметр «Индикатор активного режима» имеет значение «Ложь», указывающее, что при пересечении транспортной сети транспортных средств или ее части не выводится семиотическое представление активного или текущего режима управления транспортным средством, например «Режим автономного вождения» и «Активный режим». Могут использоваться другие значения.
[0136] Параметр «Состояния, которые следует исключить, когда другие участники дорожного движения не обнаружены» имеет значение «Остановка, предстоит ускорение», указывающее, что вывод семиотического представления для указанных состояний работы или действий управления транспортным средством, таких как «Остановка» и «Предстоит ускорение», может быть исключен в ответ на определение того, что среда работы исключает соответствующие внешние объекты для пересечения транспортной сети транспортных средств или ее части. Могут использоваться другие значения.
[0137] Параметр «Отображение неизмененного состояния при обнаружении другого участника дорожного движения» имеет значение «Истина», указывающее, что транспортное средство может выводить семиотическое представление текущего состояния работы в ответ на определение того, что среда работы включает в себя соответствующие внешние объекты для пересечения транспортной сети транспортных средств или ее части. Могут использоваться другие значения. Например, транспортное средство может не выводить семиотическое представление текущего состояния работы в ответ на определение того, что среда работы исключает соответствующие внешние объекты, и, впоследствии, в ответ на определение того, что среда работы включает в себя соответствующие внешние объекты, транспортное средство может выводить семиотическое представление текущего состояния работы.
[0138] В другом примере информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя эмпирическую информацию, указывающую, что погодные условия или условия дорожного покрытия для среды работы являются сухими, эмпирическую информацию, указывающую, что условия окружающего освещения для среды работы являются яркими, информацию транспортной сети транспортных средств, указывающую, что жилой район или область географически и временно близок к среде работы, информацию о внешних объектах, указывающую на отсутствие внешних объектов в текущей среде работы, информацию о внешней деятельности, указывающую на отсутствие внешней деятельности для текущей среды работы и информацию конфигурации пользователя, указывающую предпочтение минимизации времени вождения, а таблица модификации управления транспортным средством может быть идентифицирована на основе комбинации информации о среде работы (сухая, дневная, жилая, безлюдная, без событий, высокий приоритет оптимизации управления транспортными средствами), как показано в таблице 2.
обнаружении другого участника дорожного движения
[Таблица 2]
[0139] Таблица 1 и Таблица 2 показывают примеры рабочих элементов (параметров) и соответствующих значений, однако могут использоваться другие рабочие элементы (параметры) и другие соответствующие значения.
[0140] Например, идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для определения ориентации транспортного средства или внешнего объекта относительно части транспортной сети транспортных средств, такой как перекресток, указывающей, что транспортное средство, или внешний объект, в настоящее время проходит или неизбежно должен пройти через часть транспортной сети транспортных средств.
[0141] В другом примере идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для определения того, может ли вывод семиотического представления включать в себя вывод части семиотического представления на основе типа внешнего объекта, относительной ориентации внешнего объекта, или комбинации типа внешнего объекта и относительной ориентации внешнего объекта.
[0142] В другом примере идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для идентификации параметров расстояния, параметров скорости, параметров скорости ускорения или других параметров управления для пересечения части транспортной сети транспортных средств в соответствии с действием «Вперед» управления транспортным средством посредством управления транспортным средством для пересечения транспортной сети транспортных средств или ее части посредством медленного движения вперед на короткое расстояние, как показано посредством идентифицированных параметров.
[0143] В другом примере идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для идентификации относительной поперечной ориентации транспортного средства относительно текущей полосы движения для вывода семиотического представления пересечения транспортной сети транспортных средств в соответствии с действием «Поворот» управления транспортным средством, соответствующим управлению транспортным средством для поворота с текущей полосы движения на пересекающую дорогу.
[0144] В другом примере идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для определения скорости или скорости ускорения или замедления для управления транспортным средством для пересечения части транспортной сети транспортных средств, которая включает в себя изменение направления вдоль заданного радиуса.
[0145] В другом примере идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для определения угла поворота для управления колесами неподвижного транспортного средства для пересечения части транспортной сети транспортных средств в соответствии с действием «Поворот» управления транспортным средством, так что вывод семиотического представления посредством управления углом поворота колес соответствует управлению транспортным средством для пересечения части транспортной сети транспортных средств в соответствии с действием «Поворот» управления транспортного средства.
[0146] В другом примере идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для определения пространственного, временного или пространственно-временного расстояния для управления транспортным средством для пересечения транспортной сети транспортных средств, так что расстояние между транспортным средством и непосредственно соседним внешним объектом, например, удаленным транспортным средством, впереди, например, на ожидаемом пути транспортного средства, является идентифицированным расстоянием.
[0147] В другом примере идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для определения пространственного, временного или пространственно-временного расстояния для управления транспортным средством для пересечения части транспортной сети транспортных средств посредством замедления перед поворотом в соответствии с действием «Поворот» управления транспортным средством таким образом, что управление транспортным средством для пересечения части транспортной сети транспортных средств посредством замедления перед поворотом в соответствии с действием «Поворот» управления транспортным средством включает в себя вывод семиотического представления управления транспортным средством для пересечения части транспортной сети транспортных средств в соответствии с действием «Поворот» управления транспортным средством на идентифицированном расстоянии до управления транспортным средством для пересечения части транспортной сети транспортных средств посредством поворота в соответствии с действием «Поворот» управления транспортным средством.
[0148] В другом примере идентификация информации о модификации управления транспортным средством может включать в себя идентификацию информации о модификации управления транспортным средством для идентификации одного или нескольких параметров для управления транспортным средством для пересечения части транспортной сети транспортных средств, близкой к опосредованному условию среды работы транспортного средства, так что управление транспортным средством для пересечения части транспортной сети транспортных средств, близкой с опосредованному условию среды работы транспортного средства включает в себя управление транспортным средством для вывода семиотического представления опосредованного условия среды работы транспортного средства или вероятного воздействия опосредованного условия среды работы транспортного средства. Например, опосредованное условие среды работы транспортного средства может быть условием части транспортной сети транспортных средств, смежной или близкой к части транспортной сети транспортных средств, пересекаемой транспортным средством, которая исключена из части транспортной сети транспортных средств, которую пересекает транспортное средство и которая имеет идентифицированную вероятность влияния на работу транспортного средства или внешнего объекта в пределах части транспортной сети транспортных средств, например условие медленного движения в полосе, смежной с текущей полосой движения транспортного средства.
[0149] Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя считывание значений, соответствующих рабочим элементам, из идентифицированной таблицы модификации управления транспортным средством в качестве информации о модификации управления транспортным средством.
[0150] Идентификация информации о модификации управления транспортным средством на этапе 4300 может исключать идентификацию таблицы модификации управления транспортным средством и может включать в себя идентификацию модификаторов управления транспортным средством на основе информации о среде работы, представляющей среду работы транспортного средства, идентифицированной на этапе 4100, действия управления транспортным средством, идентифицированного на этапе 4200, или и того, и другого. Например, модификатор управления транспортным средством может соответствовать соответствующему аспекту среды работы, может быть идентифицирован для соответствующего рабочего элемента или параметра рабочих характеристик действия управления транспортным средством.
[0151] Идентификация модификаторов управления транспортным средством на основе информации о среде работы, представляющей среду работы транспортного средства, идентифицированной на этапе 4100, может включать в себя идентификацию модификаторов управления транспортным средством с использованием логических значений для аспектов среды работы.
[0152] Например, информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя эмпирическую информацию, указывающую, что погодные условия или условия дорожного покрытия для среды работы являются влажными или дождливыми, эмпирическую информацию, указывающую, что условия окружающего освещения для среды работы являются яркими (день), информацию транспортной сети транспортных средств, указывающую, что коммерческий район или область географически и временно близок к среде работы, информацию о внешних объектах, указывающую по меньшей мере один внешний пешеходный объект в текущей среде работы, информацию о внешней деятельности, указывающую на отсутствие внешней деятельности для текущей среды работы (без событий) и информацию конфигурации пользователя, указывающую на предпочтение минимизировать время вождения (высокий приоритет оптимизации управления транспортным средством). Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе эмпирической информации, указывающей на влажные или дождливые погодные условия, такого как +0,3 секунды, что может быть выражено как «Если (погода=дождь) : L + = 0,3с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе эмпирической информации, указывающей условия дневного света, например +0 секунд, что может быть выражено как «Если (свет=день): L + = 0с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации транспортной сети транспортных средств, указывающей коммерческую зону, например -0,1 секунды, что может быть выражено как «Если (область=коммерческая): L - = 0,1с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации о внешних объектах, указывающей присутствие пешехода в текущей среде работы, например +0,1 секунды, что может быть выражено как «Если (пешеходы=истина) : L + = 0,1с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации о внешней деятельности, указывающей на условия без событий, например +0 секунд, что может быть выражено как «Если (без событий) : L + = 0с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации конфигурации пользователя, указывающей высокий приоритет оптимизации управления транспортным средством, например -0,05 секунды, что может быть выражено как «Если (высокая оптимизация) : L - = 0,05с».
[0153] В другом примере информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя эмпирическую информацию, указывающую, что погодные условия или условия дорожного покрытия для среды работы являются влажными или дождливыми, эмпирическую информацию, указывающую, что условия окружающего освещения для среды работы являются темными (ночь), информацию транспортной сети транспортных средств, указывающую, что сельский район или область географически и временно близок к среде работы, информацию о внешних объектах, указывающую, что в текущей среде работы нет внешних объектов, информацию о внешней деятельности, указывающую на концерт для текущей среды работы (насыщенная событиями) и информацию конфигурации пользователя, указывающую на предпочтение предупредительного вождения (низкий приоритет оптимизации управления транспортным средством). Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе эмпирической информации, указывающей на влажные или дождливые погодные условия, например +0,3 секунды, что может быть выражено как «Если (погода=дождь) : L + = 0,3с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе эмпирической информации, указывающей темные условия, например +0,1 секунды, что может быть выражено как «Если (ночь) : L + = 0,1с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации транспортной сети транспортных средств, указывающей сельскую местность, например +0,1 секунды, что может быть выражено как «Если (сельская) : L + = 0,1с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации о внешних объектах, указывающей на отсутствие внешних объектов в текущей среде работы, например -0,15 секунды, что может быть выражено как «Если (безлюдная) : L - = 0,15с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации о внешней деятельности, указывающей на концерт, например +0,2 секунды, что может быть выражено как «Если (насыщенная событиями) : L + = 0,2с». Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации конфигурации пользователя, указывающей низкий приоритет оптимизации управления транспортным средством, например +0,05 секунды, что может быть выражено как «Если (низкая оптимизация) : L + = 0,05с».
[0154] Идентификация модификаторов управления транспортным средством на основе информации о среде работы, представляющей среду работы транспортного средства, идентифицированной на этапе 4100, может включать в себя идентификацию модификаторов управления транспортным средством с использованием дискретных или числовых значений для аспектов среды работы.
[0155] Например, информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя эмпирическую информацию, указывающую информацию датчика от датчика внешнего света транспортного средства, такую как информация датчика освещенности (IL), указывающая световой поток 105 на единицу площади (люкс), и идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) как функции Δ от эмпирической информации, указывающей информацию датчика освещенности (IL), которая может быть выражена следующим образом:
от эмпирической информации, указывающей информацию датчика освещенности (IL), которая может быть выражена следующим образом:

[0156] В другом примере информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на 4100, может включать в себя эмпирическую информацию, указывающую информацию датчика от датчика дождя транспортного средства, такую как информация датчика, указывающая процент освещенности (PIR), например 100%, и идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификатора управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) как функции Δ от эмпирической информации, указывающей процент освещенности (PIR) от датчика дождя, которая может быть выражена следующим образом:
от эмпирической информации, указывающей процент освещенности (PIR) от датчика дождя, которая может быть выражена следующим образом:

[0157] Модификатор управления транспортным средством может указывать ограничение, такое как минимальное значение, максимальное значение или диапазон значений для рабочего элемента. Например, информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя информацию транспортной сети транспортных средств, указывающую, что школа или школьная зона географически и временно близка, например, включена, примыкает или перекрывается со средой работы, и идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию ограничения управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации транспортной сети транспортных средств, указывающей школьную зону, например = 1,2 секунды, что может быть выражено как «Если (школа): L >= 1,2с».
[0158] В некоторых вариантах осуществления модификатор управления транспортным средством может указывать условное ограничение, такое как минимальное значение, максимальное значение или диапазон значений, для комбинации рабочих элементов. Например, информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя информацию транспортной сети транспортных средств, указывающую, что среда работы включает в себя жилой район, эмпирическую информацию, указывающую состояние с темным или ночным освещением, информацию о внешних объектах, указывающую на отсутствие внешних объектов и информацию о внешней деятельности, указывающую на отсутствие внешней деятельности, и идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию условного ограничения управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации транспортной сети транспортных средств, указывающей комбинацию жилого района, состояния с темным освещением, безлюдного состояния и состояния без событий, например = 1,0 секунды, что может быть максимальным ограничением и может быть выражено как «Если (жилая, темная, безлюдная, без событий) : L <= 1,0с».
[0159] В некоторых вариантах осуществления множественные условные ограничения могут быть идентифицированы на основе одного или нескольких аспектов информации о среде работы, и условное ограничение, соответствующее наибольшему количеству аспектов, может быть идентифицировано как функциональное условное ограничение. Например, информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на 4100, может включать в себя информацию транспортной сети транспортных средств, указывающую, что среда работы включает в себя жилой район, информацию транспортной сети транспортных средств, указывающую, что школа или школьная зона географически и временно близка, например, включена, смежна или перекрывается со средой работы, эмпирическую информацию, указывающую на состояние с темным или ночным освещением, информацию о внешних объектах, указывающую на отсутствие внешних объектов, и информацию о внешней деятельности, указывающую на отсутствие внешней деятельности, и идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию первого условного ограничения управления транспортным средством или его значения для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации транспортной сети транспортных средств, указывающей комбинацию жилого района, состояния с темным освещением, безлюдного состояния и состояния без событий, например = 1,0 секунды, что может быть максимальным ограничением и может быть выражено как «Если (жилая, темная, безлюдная, без событий) : L <= 1,0с», идентифицирующее второе условное ограничение управления транспортным средством или его значение для параметра «Время опережения для отображения предстоящего ускорения» (L) на основе информации транспортной сети транспортных средств, указывающей комбинацию жилого района, школьной зоны, состояния с темным освещением, безлюдного состояния и состояния без событий, например = 1,2 секунды, что может быть минимальным ограничением и может быть выражено как «Если (жилая, школьная, темная, безлюдная, без событий) : >= 1,2с», и второе условное ограничение может быть идентифицировано как условное ограничение работы.
[0160] Хотя идентификация модификаторов управления транспортным средством описана в данном документе для параметра «Время опережения для отображения предстоящего ускорения» (L), могут использоваться другие значения модификаторов управления транспортным средством, и другие модификаторы управления транспортным средством могут быть идентифицированы на основе информации о среде работы для других рабочих элементов.
[0161] В примере информация о модификации управления транспортным средством может указывать один или несколько параметров для управления выводом информации в виде семиотического представления. Например, один или несколько параметров для управления количеством или плотностью информации, выводимой в качестве семиотического представления, могут быть основаны на модальностях, доступных для транспортного средства для вывода семиотического представления.
[0162] Информация управления транспортным средством может быть идентифицирована на этапе 4400. Идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию информации управления транспортным средством на основе действия управления транспортным средством, идентифицированного на этапе 4200, информации о модификации управления транспортным средством, идентифицированной на этапе 4300, или и того, и другого. Например, информация о модификации управления транспортным средством, идентифицированная на этапе 4300, может включать в себя модификаторы управления транспортным средством, а идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию информации управления транспортным средством на основе модификаторов управления транспортным средством.
[0163] Идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию заданной информации управления транспортным средством для управления транспортным средством для пересечения транспортной сети транспортных средств. Заданная информация управления транспортным средством может включать в себя значения для соответствующих рабочих элементов или рабочих параметров для управления транспортным средством для пересечения транспортной сети транспортных средств. Заданная информация управления транспортным средством может не зависеть от среды работы. Например, заданная информация управления транспортным средством может включать в себя заданное значение, такое как 0,25 секунды, для параметра «Время опережения для отображения предстоящего ускорения» (L).
[0164] Идентификация заданной информации управления транспортным средством может включать в себя идентификацию заданной информации управления транспортным средством или ее части на основе текущего состояния работы транспортного средства на основе действия управления транспортным средством, идентифицированного на этапе 4200, первичной основы управления транспортным средством, идентифицированной на этапе 4200, на основе заданного источника данных, такого как справочная таблица, или на основе комбинации одного или нескольких из текущего состояния работы транспортного средства, действия управления транспортным средством, идентифицированного на этапе 4200, первичной основы управления транспортным средством, идентифицированной на этапе 4200, и заданного источника данных.
[0165] Идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию комбинации заданной информации управления транспортным средством и информации о модификации управления транспортным средством, идентифицированной на этапе 4300. Например, идентификация информации управления транспортным средством на этапе 4400 может включать в себя обновление или изменение одного или нескольких значений из заданной информации управления транспортным средством на основе соответствующих значений из информации о модификации управления транспортным средством.
[0166] Информация о модификации управления транспортным средством, идентифицированная на этапе 4300, может исключать ограничения, и идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию для каждого рабочего элемента суммы заданной информации управления транспортным средством для соответствующего рабочего элемента и каждого модификатора управления транспортным средством для соответствующего рабочего элемента, как соответствующей информации управления транспортным средством.
[0167] В примере информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя эмпирическую информацию, указывающую, что погодные условия или условия дорожного покрытия для среды работы являются влажными или дождливыми, эмпирическую информацию, указывающую, что условия окружающего освещения для среды работы являются яркими (день), информацию транспортной сети транспортных средств, указывающую, что коммерческий район или область географически и временно близок к среде работы, информацию о внешних объектах, указывающую по меньшей мере один внешний пешеходный объект в текущей среде работы, информацию о внешней деятельности, указывающую отсутствие внешней деятельности для текущей среды работы (без событий) и информацию конфигурации пользователя, указывающую на предпочтение минимизации времени вождения (высокий приоритет оптимизации управления транспортным средством). Для параметра «Время опережения для отображения предстоящего ускорения» (L) информация о модификации управления транспортным средством, идентифицированная на этапе 4300, может включать в себя модификатор управления транспортным средством на основе эмпирической информации, указывающей влажные или дождливые погодные условия, например +0,3 секунды; модификатор управления транспортным средством на основе эмпирической информации, указывающей условия дневного света, например +0 секунд; модификатор управления транспортным средством на основе информации транспортной сети транспортных средств, указывающей коммерческую зону, например -0,1 секунды; модификатор управления транспортным средством на основе информации о внешних объектах, указывающей присутствие пешехода в текущей среде работы, например +0,1 секунды; модификатор управления транспортным средством, основанный на информации о внешней деятельности, указывающей на условия без событий, например +0 секунд; и модификатор управления транспортным средством на основе информации конфигурации пользователя, указывающей высокий приоритет оптимизации управления транспортным средством, например -0,05 секунды. Идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию заданной информации управления транспортным средством для параметра «Время опережения для отображения предстоящего ускорения» (L), указывающего первичное значение 0,25 секунды, и может включать в себя параметр «Время опережения для отображения предстоящего ускорения» (L), идентифицирующий сумму первичного значения 0,25 с и соответствующих модификаторов управления транспортным средством, +0, +0,3, -0,1, +0,1, -0,05, в качестве информации управления транспортным средством для параметра «Время опережения для отображения предстоящего ускорения» (L), что может быть выражено следующим образом:

[0168] В другом примере информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя эмпирическую информацию, указывающую, что погодные условия или условия дорожного покрытия для среды работы являются влажными или дождливыми, эмпирическую информацию, указывающую, что условия окружающего освещения для среды работы темные (ночь), информацию транспортной сети транспортных средств, указывающую, что сельский район или область географически и временно близок к среде работы, информацию о внешних объектах, указывающую, что в текущей среде работы нет внешних объектов, информацию о внешней деятельности, указывающую на концерт для текущей среды работы (насыщенная событиями) и информацию конфигурации пользователя, указывающую на предпочтение предупредительного вождения (низкий приоритет оптимизации управления транспортным средством). Для параметра «Время опережения для отображения предстоящего ускорения» (L) информация о модификации управления транспортным средством, идентифицированная на этапе 4300, может включать в себя модификатор управления транспортным средством на основе эмпирической информации, указывающей влажные или дождливые погодные условия, например +0,3 секунды; модификатор управления транспортным средством, основанный на эмпирической информации, указывающей ночные условия, например +0,1 секунды; модификатор управления транспортным средством на основе информации транспортной сети транспортных средств, указывающей сельскую местность, например +0,1 секунды; модификатор управления транспортным средством, основанный на информации о внешних объектах, указывающей на отсутствие внешних объектов в текущей среде работы, например -0,15 секунды; модификатор управления транспортным средством на основе информации о внешней деятельности, указывающей условия насыщенности событиями, например +0,2 секунды; и модификатор управления транспортным средством на основе информации конфигурации пользователя, указывающей низкий приоритет оптимизации управления транспортным средством, например +0,05 секунды. Идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию заданной информации управления транспортным средством для параметра «Время опережения для отображения предстоящего ускорения» (L), указывающего первичное значение 0,25 секунды, и может включать в себя параметр «Время опережения для отображения предстоящего ускорения»(L), идентифицируя сумму первичного значения 0,25с и соответствующих модификаторов управления транспортным средством, +0,1, +0,3, +0,1, -0,15, +0,2, +0,05, в качестве информации управления транспортным средством для параметра «Время опережения для отображения предстоящего ускорения», которая может быть выражена следующим образом:

[0169] Информация о модификации управления транспортным средством, идентифицированная на этапе 4300, может включать в себя ограничение, и идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию для рабочих элементов, соответствующих ограничению, суммы заданной информации управления транспортным средством для соответствующего рабочего элемента и каждого модификатора управления транспортным средством для соответствующего рабочего элемента, определение того, соответствует ли сумма ограничению, и определение того, следует ли использовать сумму в качестве соответствующей информации управления транспортным средством или использовать ограничение как соответствующую информацию управления транспортным средством. Например, сумма может соответствовать ограничению, и сумма может использоваться в качестве соответствующей информации управления транспортным средством. В другом примере сумма может не соответствовать ограничению, и ограничение может использоваться как соответствующая информация управления транспортным средством.
[0170] В примере ограничение может быть ограничением минимального значения, сумма может быть по меньшей мере ограничением, например равным или большим чем, и сумма может использоваться в качестве соответствующей информации управления транспортным средством. В другом примере ограничение может быть ограничением максимального значения, сумма может находиться в пределах ограничения, например меньше чем, и сумма может использоваться в качестве соответствующей информации управления транспортным средством. В некоторых вариантах осуществления определение суммы может быть исключено, и ограничение может использоваться как соответствующая информация управления транспортным средством.
[0171] В примере информация о среде работы, представляющая среду работы транспортного средства, идентифицированная на этапе 4100, может включать в себя эмпирическую информацию, указывающую, что погодные условия или условия дорожного покрытия для среды работы являются влажными или дождливыми, эмпирическую информацию, указывающую, что условия окружающего освещения для среды работы яркие (день), информацию транспортной сети транспортных средств, указывающую то, что школьная зона географически и временно близка к среде работы, информацию о внешних объектах, указывающую по меньшей мере один внешний пешеходный объект в текущей среде работы, информацию о внешней деятельности, указывающую на отсутствие внешней деятельности для текущей среды работы (без событий) и информацию конфигурации пользователя, указывающую на предпочтение минимизировать время вождения (высокий приоритет оптимизации управления транспортным средством). Для параметра «Время опережения для отображения предстоящего ускорения» (L) информация о модификации управления транспортным средством, идентифицированная на этапе 4300, может включать в себя модификатор управления транспортным средством на основе эмпирической информации, указывающей влажные или дождливые погодные условия, например +0,3 секунды; модификатор управления транспортным средством на основе эмпирической информации, указывающей условия дневного света, например +0 секунд; ограничение модификатора управления транспортным средством на основе информации транспортной сети транспортных средств, указывающей школьную зону, например >= 1,2 секунды; модификатор управления транспортным средством на основе информации о внешних объектах, указывающей присутствие пешехода в текущей среде работы, например +0,1 секунды; модификатор управления транспортным средством, основанный на информации о внешней деятельности, указывающей на условия без событий, например +0 секунд; и модификатор управления транспортным средством на основе информации конфигурации пользователя, указывающей высокий приоритет оптимизации управления транспортным средством, например -0,05 секунды. Идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию заданной информации управления транспортным средством для параметра «Время опережения для отображения предстоящего ускорения» (L), указывающего первичное значение 0,25 секунды, определение того, что для параметра «Время опережения для отображения предстоящего ускорения» (L) информация о модификации управления транспортным средством, идентифицированная на этапе 4300, включает в себя ограничение школьной зоны и идентификацию значения ограничения школьной зоны, 1,2 секунды, в качестве информации управления транспортным средством для параметра «Время опережения для отображения предстстоящего ускорения» (L) .
[0172] Хотя это не показано отдельно на фиг. 4, в некоторых вариантах осуществления идентификация информации о модификации управления транспортным средством на этапе 4300, идентификация информации управления транспортным средством на этапе 4400 или и то, и другое, может включать в себя идентификацию весовых коэффициентов модификации управления транспортным средством, а идентификация информации управления транспортным средством на этапе 4400 может включать в себя идентификацию информации управления транспортным средством с использованием весовых коэффициентов модификации управления транспортным средством. Весовые коэффициенты модификации управления транспортным средством могут указывать умножение на весовые коэффициенты для текущего состояния управления транспортным средством относительно соответствующего модифицированного состояния управления транспортным средством, так что управление транспортным средством для пересечения транспортной сети транспортных средств посредством перехода от текущего состояния управления транспортным средством к модифицированному состоянию управления транспортным средством включает в себя управление транспортным средством для перехода от текущего состояния управления транспортным средством к модифицированному состоянию управления транспортным средством в течение заданного периода, так что скорость изменения для соответствующего элемента управления транспортным средством находится в пределах порогового значения, указанного посредством информации управления транспортным средством.
[0173] Транспортное средство может пересекать транспортную сеть транспортных средств или ее часть на этапе 4500. Пересечение транспортной сети транспортных средств или ее части на этапе 4500 может включать в себя пересечение транспортной сети транспортных средств или ее части в соответствии с информацией управления транспортным средством, идентифицированной на этапе 4400. Пересечение транспортной сети транспортных средств или ее части на этапе 4500 в соответствии с информацией управления транспортным средством, идентифицированной на этапе 4400, может включать в себя управление транспортным средством для пересечения транспортной сети транспортных средств или ее части на основе информации управления транспортным средством.
[0174] В некоторых вариантах осуществления пересечение транспортной сети транспортных средств или ее части на этапе 4500 в соответствии с информацией управления транспортным средством, идентифицированной на этапе 4400, может включать в себя вывод, отправку, передачу или иное обеспечение информации управления транспортным средством в другую систему, устройство или блок транспортного средства, например, блок управления маршрутизацией и навигацией транспортного средства или автономный контроллер управления операциями транспортного средства, так что другая система, устройство или блок управляет транспортным средством для пересечения транспортной сети транспортных средств или ее части в соответствии с информацией управления транспортным средством.
[0175] Например, пересечение транспортной сети транспортных средств или ее части на этапе 4500 может включать в себя формирование объединенной информации управления транспортным средством посредством дополнения или изменения несемиотического действия управления транспортным средством, идентифицированного на этапе 4200 на основе информации управления транспортным средством, указанной на этапе 4400, например посредством модификации параметра производительности для действия управления транспортным средством на основе соответствующей информации управления транспортным средством, идентифицированной на этапе 4400, и управления транспортным средством для пересечения транспортной сети транспортных средств или ее части в соответствии с объединенной информацией управления транспортным средством.
[0176] Пересечение транспортной сети транспортных средств или ее части на этапе 4500 может включать в себя вывод семиотического представления информации управления транспортным средством на этапе 4510. Пересечение транспортной сети транспортных средств или ее части на этапе 4500 может включать в себя выполнение или исполнение одной или нескольких семиотических операций управления транспортным средством посредством управления или модификации управления транспортным средством для пересечения транспортной сети транспортных средств или ее части, так что пересечение транспортной сети транспортных средств или ее части включает в себя вывод семиотического представления информации управления транспортным средством на этапе 4510. Хотя это явно не показано на фиг. 4, пересечение транспортной сети транспортных средств или ее части на этапе 4500 может включать в себя выполнение или реализацию одной или нескольких несемиотических операций или действий управления транспортным средством.
[0177] Пересечение транспортной сети транспортных средств или ее части на этапе 4500 в соответствии с информацией управления транспортным средством может включать в себя выполнение или исполнение комбинации операций или действий управления транспортным средством, или последовательности или серии операций или действий управления транспортным средством, или комбинаций операций или действий управления транспортным средством.
[0178] Операции управления транспортным средством могут включать в себя семиотические операции управления транспортным средством, и пересечение транспортной сети транспортных средств или ее части в соответствии с семиотической информацией управления транспортным средством или семиотической операцией управления транспортным средством, управление транспортным средством для выполнения или исполнения семиотической операции транспортного средства, или иначе выполнение или исполнение семиотической операции транспортного средства может включать в себя сигнализацию, представление, отображение, выполнение или иной вывод семиотического представления информации управления транспортным средством, которая может включать в себя значимое выражение или передачу информации управления транспортным средством или ее части, или информации, указывающей на информацию управления транспортным средством, или ее части.
[0179] Операции управления транспортным средством могут включать в себя несемиотические операции управления транспортным средством, и пересечение транспортной сети транспортных средств или ее части в соответствии с несемиотической информацией управления транспортным средством или несемиотической операцией управления транспортным средством, управление транспортным средством для выполнения или исполнения несемиотической операции транспортного средства или иное выполнение или исполнение несемиотической операции транспортного средства может включать в себя управление или работу транспортного средства независимо от вывода семиотического представления.
[0180] Вывод семиотического представления информации управления транспортным средством может включать в себя управление одним или несколькими способами сигнализации или связи транспортного средства для вывода семиотического представления информации управления транспортным средством или его части. В некоторых вариантах осуществления идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию доступных модальностей транспортного средства для вывода семиотического представления информации управления транспортным средством и идентификацию информации о модификации управления транспортным средством на основе доступных модальностей. Например, средства, доступные для транспортного средства для вывода семиотического представления, или устройства вывода могут включать в себя один или несколько блоков внешнего светового представления, один или несколько блоков внешнего звукового представления, один или несколько блоков управления сетью электронной связи, один или несколько блоков управления скоростью, кинетическим состоянием или управлением движением, или их комбинацию. Могут использоваться другие модальности.
[0181] Вывод семиотического представления информации управления транспортным средством на этапе 4510 может включать в себя управление блоком внешнего светового представления или комбинацией блоков внешнего светового представления транспортного средства для вывода по меньшей мере части семиотического представления информации управления транспортным средством. Блок внешнего светового представления может быть, например, одной или несколькими фарами, задними фонарями, сигналами поворота, отдельными фонарями, группами огней, такими как световые полосы, световые ленты, светоизлучающие диодные (LED - light emitting diode) ленты, изменяющие цвет световые ленты, графические дисплеи на транспортном средстве, проекторы изображений, устройства дополненной реальности, текстовые дисплеи или любой другой блок или устройство, способное выводить любую часть семиотического представления информации управления транспортным средством посредством управления или манипулирования светом. Например, управление блоком внешнего светового представления может включать в себя управление яркостью или освещенностью блока внешнего светового представления, управление цветом или комбинацией цветов блока внешнего светового представления, управление направлением вывода блока внешнего светового представления, управление выходной частотой, скоростью, временем или периодом блока внешнего светового представления, управление движением выхода света или блока внешнего светового представления, управление шаблоном выхода света, управление анимацией выхода света или иную модуляцию вывода блока внешнего светового представления, управление блоком внешнего светового представления для отображения или иного вывода текста, графики или их комбинации, управление блоком внешнего светового представления для анимации вывода блока внешнего светового представления или любую их комбинацию.
[0182] Вывод семиотического представления информации управления транспортным средством на этапе 4510 может включать в себя управление блоком внешнего звукового представления или комбинацией блоков внешнего звукового представления транспортного средства для вывода по меньшей мере части семиотического представления информации управления транспортным средством. Блок внешнего звукового представления может быть, например, звуковым сигналом, динамиком или любым другим блоком или устройством, выполненным с возможностью вывода любой части семиотического представления информации управления транспортным средством посредством управления звуком или манипулирования им. Например, управление блоком внешнего звукового представления может включать в себя управление частотой, тоном, фазой или амплитудой блока внешнего светового представления, что может включать в себя управление блоком внешнего светового представления для вывода последовательности или серии звуков.
[0183] Вывод семиотического представления информации управления транспортным средством на этапе 4510 может включать в себя управление блоком управления сетью электронной связи транспортного средства для вывода информации, указывающей по меньшей мере часть семиотического представления информации управления транспортным средством, например, посредством вывода, отправки, широковещательной передачи, или передачи сигнала электронной связи через электронную среду связи на внешнее устройство, такое как удаленное транспортное средство или устройство инфраструктуры.
[0184] Вывод семиотического представления информации управления транспортным средством на этапе 4510 может включать в себя управление блоком управления скоростью, которое может включать в себя управление блоком управления состоянием направленности транспортного средства, блоком управления кинетическим состоянием транспортного средства или и тем, и другим для вывода по меньшей мере части семиотического представления информации управления транспортным средством.
[0185] Управление блоком управления состоянием направленности, таким как блок рулевого управления, для вывода по меньшей мере части семиотического представления информации управления транспортным средством может включать в себя управление блоком управления состоянием направленности для управления или изменения состояния направленности транспортного средства, например, посредством поворота или управления транспортным средством, так что выводится по меньшей мере часть семиотического представления информации управления транспортным средством. Управление состоянием направленности может включать в себя поддержание текущего состояния направленности, так что выводится по меньшей мере часть семиотического представления информации управления транспортным средством.
[0186] Управление блоком управления кинетическим состоянием, таким как ускоритель или тормозной блок, транспортного средства для вывода по меньшей мере части семиотического представления информации управления транспортным средством может включать в себя управление блоком управления кинетическим состоянием для управления или изменения кинетического состояние транспортного средства, например, посредством ускорения или замедления транспортного средства, так что выводится по меньшей мере часть семиотического представления информации управления транспортным средством. Управление кинетическим состоянием может включать в себя поддержание текущего кинетического состояния, так что выводится по меньшей мере часть семиотического представления информации управления транспортным средством.
[0187] Вывод семиотического представления информации управления транспортным средством на этапе 4510 может включать в себя вывод семиотического представления по меньшей мере части состояния работы транспортного средства одновременно с пересечением транспортной сети транспортных средств или его части на этапе 4512, вывод семиотического представления первичной основы управления транспортным средством на этапе 4514 или их комбинацию.
[0188] Вывод семиотического представления состояния работы транспортного средства одновременно с пересечением транспортной сети транспортных средств или его части на этапе 4512 может включать в себя вывод семиотического представления текущего состояния работы транспортного средства, вывод семиотического представления ожидаемого состояния работы транспортного средства или их комбинацию.
[0189] Например, текущее состояние работы транспортного средства может быть ускорением от стационарного состояния через перекресток, а вывод семиотического представления текущего состояния работы транспортного средства может включать в себя вывод семиотического представления, указывающего, что транспортное средство движется или ускоряется через перекресток.
[0190] В другом примере текущее состояние работы транспортного средства может быть стационарным на перекрестке, ожидаемым, предстоящим или вероятным состоянием работы транспортного средства, которое может быть связано с временным местоположением, например, близким по времени будущим временным местоположением, может быть ускорением через перекресток, а вывод семиотического представления ожидаемого состояния работы транспортного средства может включать в себя вывод семиотического представления, указывающего, что ожидаемая, неизбежная или вероятная близкая по времени будущая скорость транспортного средства движется или ускоряется через перекресток. Ожидаемое, вероятное или прогнозируемое состояние работы транспортного средства может быть предстоящим, ожидаемым, вероятным или прогнозируемым состоянием работы транспортного средства в близком по времени будущем временном местоположении после или одновременно с управлением транспортным средством для выполнения идентифицированной операции или действия управления транспортным средством или их последовательности, или комбинации.
[0191] Прежде по времени или одновременно с управлением транспортным средством для выполнения идентифицированной операции или действия управления транспортным средством, или последовательности или комбинации идентифицированных операций или действий управления транспортным средством, идентифицированная операция или действие управления транспортным средством, или последовательность или комбинация идентифицированных операций или действий управления транспортным средством, или неизбежное, ожидаемое, вероятное или прогнозируемое состояние работы транспортного средства в близком по времени будущем временном местоположении после или одновременно с управлением транспортным средством для выполнения идентифицированной операции или действия управления транспортным средством, или последовательности или комбинации идентифицированных операций или действий управления транспортным средством, может упоминаться в данном документе как намерение или намерение транспортного средства, а семиотическое представление информации управления транспортным средством, указывающей идентифицированную операцию или действие управления транспортным средством, или последовательность или комбинацию идентифицированных операций или действий управления транспортным средством, могут называться здесь как намерение или индикатор намерения или индикация.
[0192] Вывод семиотического представления первичной основы управления транспортным средством на этапе 4514 может включать в себя формирование индикации или представления, которые могут упоминаться здесь как индикация или индикатор обоснования первичной основы управления транспортным средством, идентифицированной на этапе 4100, на основе информации управления транспортным средством, идентифицированной на этапе 4400.
[0193] Могут использоваться другие реализации интерактивного внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением. Например, одно или несколько из определения информации о среде работы на этапе 4100, определения действия управления транспортным средством на этапе 4200, определения информации о модификации управления транспортным средством на этапе 4300, определения информации управления транспортным средством на этапе 4400, управления транспортным средством для пересечения транспортной сети транспортных средств или ее части на этапе 4500 можно объединять или выполнять одновременно или параллельно.
[0194] В некоторых вариантах осуществления идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя определение того, что вероятность неоднозначности для вывода семиотического представления превышает заданное пороговое значение неоднозначности, и идентификацию информации о модификации управления транспортным средством для минимизации вероятности неоднозначности.
[0195] Например, идентификация информации о среде работы на этапе 4100 может включать в себя определение того, что транспортное средство движется по шоссе, приближаясь к серии из двух или более съездов в относительно близкой близости. Идентификация действия управления транспортным средством на этапе 4200 может включать в себя идентификацию действия «Съезд» управления транспортным средством для съезда на последовательно втором съезде. Идентификация информации о модификации управления транспортным средством на этапе 4300 может включать в себя идентификацию модификаторов времени сигнала, расширяющих или увеличивающих параметр времени сигнала для вывода семиотического представления действия «Съезд» управления транспортным средством, так что вывод семиотического представления действия «Съезд» управления транспортным средством как модифицированного посредством параметра времени сигнала может включать в себя вывод по меньшей мере части семиотического представления действия «Съезд» управления транспортным средством, модифицированного посредством параметра времени сигнала, по существу до пересечения последовательно первого съезда, и вероятность неоднозначности для вывода части семиотического представления действия «Съезд» управления транспортным средством, модифицированного посредством параметра времени сигнала, по существу до пересечения последовательно первого съезда может превышать заданное пороговое значение неоднозначности, которое может указывать на заданную вероятность того, что вывод части семиотического представления действия «Съезд» управления транспортным средством, модифицированного посредством параметра времени сигнала, по существу до пересечения последовательно первого съезда, может передавать указание на то, что предстоящий или ожидаемый путь для транспортного средства включает в себя пересечение первого съезда.
[0196] Минимизация вероятности неоднозначности может включать в себя определение модификаторов управления транспортным средством, которые уменьшают, минимизируют или исключают вероятность того, что вывод части семиотического представления действия «Съезд» управления транспортным средством, модифицированного посредством параметра времени сигнала, может сообщать указание о том, что предстоящий или ожидаемый путь для транспортного средства включает в себя пересечение первого съезда.
[0197] В некоторых вариантах осуществления информация о модификации управления транспортным средством, идентифицированная на этапе 4300, заданная информация управления транспортным средством, идентифицированная на этапе 4400, или и то, и другое могут частично основываться на одном или нескольких областных факторах. Например, идентификация информации о модификации управления транспортным средством на этапе 4300, идентификация заданной информации управления транспортным средством на этапе 4400 или и то, и другое может включать в себя коррекцию или умножение на весовые коэффициенты соответствующей информации на основе одного или нескольких областных факторов. Областные факторы могут указывать модификации вывода семиотических представлений на основе относительно большой геопространственной области, такой как геопространственная область, многократно расширяющая текущую среду работы за пределы текущей среды работы.
[0198] Фиг. 5 является схемой системы 5000 для интерактивной внешней связи транспортного средства с пользователем в соответствии с реализациями этого раскрытия. Система 5000 может быть реализована или интегрирована в транспортное средство, такое как транспортное средство 1000, показанное на фиг. 1, или одно из транспортных средств 2100/2110, показанных на фиг. 2, которое может быть автономным транспортным средством, полуавтономным транспортным средством или любым другим транспортным средством, реализующим автономное вождение. Один или несколько модулей системы 5000 могут храниться и/или могут выполнять инструкции, хранящиеся в памяти транспортного средства, такой как память 1340 на фиг. 1.
[0199] Система 5000 может включать в себя модуль 5002 модели мира, модуль 5004 планировщика траектории и модуль 5006 интерфейса человек-машина (HMI - human-machine interface). Некоторые варианты осуществления могут включать в себя меньше, больше или другие модули. В некоторых вариантах осуществления функции, описанные ниже в отношении некоторых модулей, могут быть реализованы, по меньшей мере частично, посредством других модулей. В некоторых вариантах осуществления некоторые из модулей могут быть объединены. В некоторых вариантах осуществления один или несколько модулей могут быть разделены на другие модули.
[0200] Модуль 5002 модели мира может поддерживать и отслеживать информацию о внешних объектах, например информацию о внешних объектах, описанную со ссылкой на фиг. 4. Модуль 5002 модели мира может принимать данные датчика, например, от датчика 1360 на фиг. 1, и может определять (например, преобразовывать в, обнаруживать и т.д.) внешние объекты по данным датчика. То есть, например, модуль 5002 модели мира может определять внешние объекты, в том числе других участников дорожного движения, по принятым данным датчиков. В иллюстративном примере модуль 5002 модели мира может преобразовывать облако точек, принятое от лазерного дальномера (LiDAR - light detection and ranging) (т.е. датчика датчика 126), в объект (например, внешнего пользователя). Данные датчиков от нескольких датчиков могут быть объединены для определения (например, предположения классификации) внешних объектов. Примеры классификации объектов могут включать в себя велосипед, пешехода, транспортное средство и т.д.
[0201] Модуль 5002 модели мира может принимать информацию датчика, которую модуль 5002 модели мира может использовать для вычисления и поддержания дополнительной информации по меньшей мере для некоторых из обнаруженных объектов. Например, модуль 5002 модели мира может поддерживать состояние по меньшей мере для некоторых из обнаруженных объектов. Например, состояние объекта может включать в себя ноль или более для скорости, пространственного расположения, геометрии (такой как ширина, высота и глубина), классификации (например, велосипед, большой грузовик, пешеход, дорожный знак и т.д.) и местоположения. По существу, состояние объекта включает в себя дискретную информацию о состоянии (например, классификацию) и непрерывную информацию о состоянии (например, пространственное расположение и скорость).
[0202] Например, в отношении пешехода информация о состоянии может включать в себя более, менее информации, помимо информации о положении головы, ориентации туловища, информации о взгляде и т.п. Модуль 5002 модели мира может поддерживать пространственное расположение, которое может включать в себя ориентацию туловища, движения рук, положения бедер, движения глаз, ориентацию головы, более, менее или другие движения тела.
[0203] Модуль 5002 модели мира может объединять информацию датчиков, может отслеживать объекты, может поддерживать списки гипотез по меньшей мере для некоторых внешних объектов (например, объект A может двигаться прямо, поворачивать направо или поворачивать налево), может создавать и может поддерживать прогнозируемые траектории для каждой гипотезы и может поддерживать оценки вероятности каждой гипотезы (например, объект A движется прямо с вероятностью 90% с учетом положения/скорости объекта и пространственных расположений/скоростей траектории).
[0204] В качестве примера, модуля 5002 модели мира использует экземпляры модуля 5004 планировщика траектории для формирования соответствующей опорной линии движения для каждой гипотезы объекта для по меньшей мере некоторых из внешних объектов. Например, один или несколько экземпляров планировщика траектории могут использоваться для формирования опорных линий движения для транспортных средств, велосипедов и пешеходов. В другом примере экземпляр планировщика траектории может использоваться для формирования опорных линий движения для транспортных средств и велосипедов, а другой способ может использоваться для формирования опорных линий движения (например, опорных путей) для пешеходов. Как упоминалось выше, интерактивная внешняя связь транспортного средства с пользователем может включать в себя определение или отслеживание ожидаемого пути внешнего объекта (например, того, что внешний объект в настоящее время продвигается через часть транспортной сети транспортных средств или ожидается, что он будет продвигаться через нее). Ожидаемый путь может быть гипотезой, связанной с внешним объектом. Информация о состоянии, связанная с внешним объектом (например, ориентация внешнего объекта), может быть информацией о состоянии, связанной с гипотезой.
[0205] Модуль модели мира может непрерывно принимать наблюдения (например, данные датчиков). Для данного наблюдения модуль модели мира может определять внешний объект, с которым связано наблюдение. Если связанный внешний объект найден, то состояние каждой из гипотез, связанных с внешним объектом, может быть обновлено на основе наблюдения. То есть, например, прогнозируемое местоположение внешнего объекта обновляется на основе ранее спрогнозированного местоположения и на основе наблюдения, принятого из реального (например, физического) мира. То есть предыдущие прогнозы (например, информация о будущем состоянии, включая будущие местоположения внешнего объекта) могут быть объединены с наблюдениями датчиков для обновления прогнозов.
[0206] Модуль 5004 планировщика траектории может принимать ожидаемые (то есть прогнозируемые) траектории других участников дорожного движения (например, внешних объектов) транспортной сети транспортных средств от модуля 5002 модели мира. По меньшей мере для некоторых из обнаруженных внешних объектов (например, таких как транспортное средство, пешеход, велосипед и/или другие внешние объекты, которые определены как движущиеся или вероятно движущиеся), модуль модели мира может поддерживать (например, прогнозировать и обновлять) одну или несколько гипотез относительно возможных намерений реального объекта. Примеры намерений (например, гипотез) для транспортного средства могут включать в себя остановку, поворот направо, поворот налево, движение прямо, проезд, продвижение, уступку и парковку. Примеры намерений пешехода могут включать в себя остановку (например, у знака остановки), прогулку (например, переход через перекресток) и бег. Вероятность может быть связана с каждой гипотезой. Вероятность обновляется на основе наблюдений, принятых из данных датчиков. Вероятность гипотезы указывает на неизбежность гипотезы.
[0207] Модуль 5006 HMI может вызывать вывод семиотического представления (например, описанного в отношении операции 4510 на фиг. 4). Модуль 5006 HMI может принимать подтверждение в ответ на семиотическое представление. Модуль 5006 HMI может переводить (например, интерпретировать, преобразовывать или иным образом переводить) информацию о состоянии внешнего объекта в подтверждение (например, ответ) от объекта. Информация о состоянии может быть переведена в явное подтверждение. Информация о состоянии может быть переведена в неявное подтверждение. В некоторых примерах уровень неопределенности может быть связан с ответом.
[0208] В иллюстративном примере модуль 5006 HMI может переводить информацию о состоянии, которая поддерживается посредством модуля 5002 модели мира, такую как последовательность движений руки пешехода (например, внешнего объекта) (например, поднятая рука и ладонь обращена к транспортному средству) в жест команды (например, явное подтверждение) остановки транспортному средству. Например, модуль 5006 HMI может интерпретировать последовательность движений головы и/или ног (например, пешеход поворачивает голову к транспортному средству, а затем смотрит вниз, не перемещая остальную часть тела пешехода) как неявное подтверждение транспортному средству, что пешеход дает преимущественное право проезда транспортному средству.
[0209] Модуль 5006 HMI может использовать одну или несколько методологий, техник или технологий обнаружения и подтверждения движения для перевода информации о состоянии внешнего объекта в подтверждение. Например, в отношении пешехода данные датчика (например, датчика 1360 на фиг.1) (например, изображения, данные LiDAR и т.д.) могут сравниваться с шаблонами, в которых шаблон соотносится с подтверждением. Например, транспортное средство может включать в себя один или несколько классификаторов, направленных на распознавание жестов, движений и/или положений тела и определения подтверждения на основе информации о состоянии, связанной с внешним объектом. Например, классификатор распознавания жестов, такой как алгоритм динамического преобразования времени (DTW - Dynamic Time Warping), может использоваться для определения того, соответствует ли принятый сигнал жеста шаблону жеста для идентификации жеста.
[0210] Фиг. 6 - это блок-схема последовательности операций процесса 6000 для интерактивной внешней связи транспортного средства с пользователем в соответствии с реализациями этого раскрытия. Процесс 6000 может быть реализован в или посредством автономного транспортного средства (AV), такого как транспортное средство 1000, показанное на фиг. 1, или одно из транспортных средств 2100/2110, показанных на фиг. 2. AV может быть полуавтономным транспортным средством или любым другим транспортным средством, реализующим автономное вождение. AV выполнено с возможностью пересечения части транспортной сети транспортных средств.
[0211] Процесс 6000 может пересекать транспортную сеть транспортных средств или ее часть, например, как описано со ссылкой на фиг. 4. Выходные данные семиотического представления на этапе 4512 могут быть нацелены на целевого внешнего пользователя, а не представлять собой сообщение, например широковещательное. Процесс 6000 может принимать подтверждение от целевого внешнего пользователя в семиотическое представление и, в ответ на подтверждение, управлять AV для пересечения части транспортной сети транспортных средств, что может включать в себя вывод второго семиотического представления на основе подтверждения.
[0212] На этапе 6100 процесс 6000 идентифицирует информацию о среде работы, представляющую текущую среду работы для AV, так что информация о среде работы включает в себя информацию, представляющую идентифицированный аспект текущей среды работы. Процесс 6000 может идентифицировать информацию о среде работы, как описано в отношении этапа 4100 на фиг. 4.
[0213] На этапе 6200 процесс 6000 идентифицирует целевого внешнего пользователя. Целевой внешний пользователь может быть идентифицирован на основе текущей среды работы для AV. Целевой внешний пользователь может быть соответствующим внешним объектом, например, описанным со ссылкой на фиг. 4. Целевой внешний пользователь может быть идентифицирован на основе гипотезы, которая может отслеживаться посредством модуля модели мира, таким как модуль 5002 модели мира согласно фиг. 5. Целевой внешний пользователь может быть идентифицирован на основе того, является ли целевой объект или, вероятно, станет блокирующим объектом, например, как описано со ссылкой на фиг. 4. Целевой внешний пользователь идентифицируется как блокирующий объект или может стать блокирующим объектом на основе траектории целевого внешнего пользователя. Идентификация целевого внешнего пользователя может включать в себя идентификацию нескольких внешних пользователей. Например, на этапе 6200 можно идентифицировать несколько внешних пользователей, которые совместно обладают одним или несколькими общими свойствами. Например, общим свойством может быть то, что все несколько внешних пользователей переходят с одной стороны на другую сторону перекрестка, все находятся в пределах заданного диапазона скоростей и т.п. Таким образом, целевой внешний пользователь может быть группой внешних пользователей.
[0214] Целевой внешний пользователь может быть идентифицирован на основе близости к AV. Например, может быть идентифицирован целевой внешний пользователь, который является пользователем в пределах дальности действия AV. В примере диапазон может составлять от двух до пятнадцати метров. Возможны другие диапазоны.
[0215] На этапе 6300 процесс 6000 управляет AV для вывода первого семиотического представления информации управления AV, связанной с информацией о среде работы. Первое семиотическое представление информации управления AV может быть специфичным для целевого внешнего пользователя (например, предназначенным для него). В примере процесс 6000 выводит первое семиотическое представление, как описано в отношении этапа 4510 на фиг. 4. Например, первое семиотическое представление может включать в себя намерение транспортного средства и основу намерения транспортного средства, как описано выше. Например, первое семиотическое представление может дополнительно или вместо этого включать в себя по меньшей мере одно из состояния работы AV или состояния движения AV.
[0216] На этапе 6400 процесс 6000 принимает подтверждение первого семиотического представления от целевого внешнего пользователя. Подтверждение принято от целевого внешнего пользователя. AV может отображать ответ от внешнего пользователя на подтверждение. Ответ внешнего пользователя может включать в себя ноль или более жестов, действий, движений тела (например, частей тела), других ответов или их комбинацию. По существу, ответ может быть явным (например, активным) ответом; ответ может быть неявным (например, пассивным); ответ может указывать на замешательство пользователя или недопонимание относительно первого семиотического представления; и ответ может быть ожидаемым ответом, например ответом, не отвечающим на первое семиотическое представление.
[0217] В случае, когда внешний целевой пользователь является группой внешних пользователей, подтверждение может быть принято от любого из группы внешних пользователей. В случае, когда принято несколько конфликтующих подтверждений, можно предположить, что наименее явный ответ будет (например, принят как) ответом группы внешних пользователей. Например, ответы могут быть ранжированы в соответствии со степенью ясности, где явный ответ может иметь наивысшую степень подробности, а ответ замешательства или недопонимания может иметь наименьшую степень явности.
[0218] AV может отображать ответ целевого внешнего пользователя на намерение целевого внешнего пользователя. То есть AV может интерпретировать ответ целевого внешнего пользователя как намерение целевого внешнего пользователя. Намерение целевого внешнего пользователя может быть основано на контексте ответа. Контекст ответа может быть основан на идентифицированных различных сценариях работы транспортного средства AV. То есть, например, процесс 6000 может отображать ответ на подтверждение в контексте конфигурации дороги, местоположения, других факторов или их комбинации.
[0219] На этапе 6500, в ответ на подтверждение, процесс 6000 управляет AV для пересечения части транспортной сети транспортных средств. Пересечение части транспортной сети транспортных средств может включать в себя управление AV для вывода второго семиотического представления на основе подтверждения от целевого внешнего пользователя.
[0220] Теперь операции процесса 6000 проиллюстрированы с использованием примеров. Однако специалист в данной области техники может понять, что реализации согласно этому раскрытию не ограничиваются иллюстративными примерами. В следующих примерах предполагается, что AV остановлено у знака «Стоп» или иным образом уступает дорогу пешеходу (например, целевому внешнему пользователю) и отображает семиотическое представление (например, первое семиотическое представление). Первое семиотическое представление может отображаться посредством операции 6300 процесса 6000. Первое семиотическое представление может указывать намерению AV, что AV останавливается и уступает дорогу пешеходу, так что пешеход может перейти дорогу.
[0221] В первом сценарии процесс 6000, например, посредством модуля 5006 HMI согласно фиг. 5, может обнаруживать ответ пешехода. Ответ может быть основан на языке тела (например, на движении части тела). Например, процесс 6000 может обнаруживать жест руки, кивок головой и т.п., которые можно понимать как «спасибо», «ОК» и т.п. Например, социальные нормы и правила поведения (например, контекст) можно использовать для придания значения жестам. Например, у знака «Стоп», как правило, водитель/пешеход, который уступает, признает человека/водителя, который уступает ему. Таким образом, если контекст включает в себя знак остановки, перекресток и информацию о состоянии транспортного средства, указывающую «уступить дорогу», AV может интерпретировать подтверждение в этом контексте.
[0222] Можно использовать любую доступную технику определения языка тела. В иллюстративном примере жест руки можно сравнить (например, классифицировать как или иначе сравнить с) шаблонными жестами руки, которые могут указывать на подтверждение первого семиотического представления. Например, жест руки может быть распознан как знак ОК. В другом примере ответ может быть обнаружен на основе отслеживания взгляда. Например, процесс 6000 может обнаруживать, что пешеход зациклился на первом семиотическом представлении в течение достаточно длительного времени, чтобы понять (например, прочитать) первое семиотическое представление. Таким образом, подтверждение является явным подтверждением. Может быть доступно любое количество способов приема явного подтверждения.
[0223] В примере процесс 6000 на этапе 6500 управляет AV для пересечения части транспортной сети транспортных средств, например, посредством ожидания (например, посредством определения действия (действий) управления транспортным средством и управления AV соответствующим образом), пока пешеход перейдет дорогу, и продолжения движения после перехода пешехода. В другом примере управление AV на этапе 6500 может включать в себя на этапе 6510 управление AV для вывода второго семиотического представления на основе подтверждения от целевого внешнего пользователя. В одном примере второе семиотическое представление может включать в себя информационное сообщение. Примером информационного сообщения может быть «Пожалуйста, следите за дорожным движением других». В одном примере второе семиотическое представление может включать в себя подтверждение явного подтверждения, например «Вы указали, что будете переходить», и намерение транспортного средства, например «Я буду ждать вас».
[0224] Во втором сценарии пешеход переходит дорогу. Переход пешехода для перехода дороги может интерпретироваться AV (например, на этапе 6400 процесса 6000) как подтверждение первого семиотического представления. Таким образом, процесс 6000 принимает неявное подтверждение от целевого внешнего пользователя. Может быть доступно любое количество способов приема неявного подтверждения.
[0225] В одном примере гипотеза, связанная с намерением пешехода перейти дорогу, может отслеживаться, например, посредством модуля 5002 модели мира согласно фиг. 5. Гипотеза может включать в себя прогнозируемые местоположения пешехода на основе намерения. В примере прогнозируемые местоположения могут сравниваться с фактическими местоположениями (на основе принятых данных датчиков и связанных с пешеходом) пешехода для определения того, что пешеход подтвердил первое семиотическое представление. По существу, прием подтверждения первого семиотического представления на этапе 6400 может быть основан на определении того, что прогнозируемые местоположения пешехода, соответствующие пешеходу, переходящему дорогу, совпадают с наблюдаемыми местоположениями пешехода.
[0226] В другом примере прием подтверждения первого семиотического представления может быть основан на движении тела. Например, то, что пешеход вытянул ногу в направлении, соответствующем переходу дороги, может быть подтверждением, принятым от пешехода. Таким образом, действие пешехода, которое согласуется с намерением гипотезы, может быть подтверждением первого семиотического представления.
[0227] В примере процесс 6000 на этапе 6500 управляет AV для пересечения части транспортной сети транспортных средств, например, посредстом ожидания (например, посредством определения действия (действий) управления транспортным средством и управления AV соответствующим образом), пока пешеход перейдет дорогу, и продолжения движения после перехода пешехода. В другом примере управление AV на этапе 6500 может включать в себя на этапе 6510 управление AV для вывода второго семиотического представления на основе неявного подтверждения от целевого внешнего пользователя. Второе семиотическое представление может включать в себя интерпретацию неявного подтверждения и намерения транспортного средства. Например, второе семиотическое представление может передавать сообщение, которое пешеход может понять как означающее: «Я жду, пока вы перейдете; но для вашей же безопасности в следующий раз обратите внимание».
[0228] В третьем сценарии пешеход обеспечивает (то есть AV принимает) неявное подтверждение, которое вынуждает AV управлять AV для пересечения части транспортной сети транспортных средств в соответствии с намерением, отличным от того, что включено в первое семиотическое представление. Например, процесс 6000 может принять ответ от пешехода, который указывает, что пешеход не намеревается переходить дорогу.
[0229] Например, процесс 6000 (например, через модуль HMI, такой как модуль 5006 HMI) может обнаруживать, что пешеход не движется и/или движется в направлении, которое несовместимо с переходом дороги. Например, пешеход может стоять на месте. В другом примере пешеход может смотреть на AV или в сторону AV, а затем отводить взгляд, что процесс 6000 может принять на этапе 6400 в качестве подтверждения на основе ориентации головы, обнаружения взгляда и т.п. Таким образом, на этапе 6500 процесс 6000 управляет AV для пересечения части транспортной сети транспортных средств в соответствии с намерением, отличным от этого вывода, на этапе 6300, в первом семиотическом представлении. Процесс 6500 может на этапе 6510 вывести второе семиотическое представление на основе подтверждения. Например, второе семиотическое представление может передавать сообщение, которое пешеход может понять как означающее «кажется, что вы не переходите дорогу; так что я проеду».
[0230] В другом примере задержка может быть связана с управлением AV для пересечения части транспортной сети транспортных средств на этапе 6500. Например, задержка может использоваться в качестве защиты от неправильной интерпретации подтверждения (неявного или явного). Величина задержки может быть включена во второе семиотическое представление на этапе 6510. Например, второе семиотическое представление может передавать сообщение, которое пешеход может понять как означающее «кажется, что вы не переходите дорогу; так что я проеду через 3 секунды». В другом примере обратный отсчет может быть связан с задержкой, и процесс 6000 может обновить второе семиотическое представление в соответствии с обратным отсчетом. Например, начальное второе семиотическое представление может быть таким: «кажется, что вы не пересекаете дорогу; так что я проеду через 3 секунды», и второе семиотическое представление может быть обновлено по прошествии одной секунды для указания «кажется, что вы не переходите; так что я проеу через 2 секунды» и так далее.
[0231] В четвертом сценарии AV принимает явное подтверждение, которое вынуждает AV управлять AV для пересечения части транспортной сети транспортных средств в соответствии с намерением, отличным от того, что включено в первое семиотическое представление. Например, процесс 6000 может принять ответ от пешехода, который указывает, что пешеход не намеревается переходить дорогу и/или что AV должно двигаться первым. Ответ может быть основан на языке тела (например, на движении части тела). Например, процесс 6000 может обнаруживать жест руки, кивок головой и т.п., которые можно понимать как означающие, что пешеход уступает дорогу AV. Соответственно, процесс 6500 может на этапе 6510 вывести второе семиотическое представление на основе явного подтверждения. Например, второе семиотическое представление может передавать сообщение, которое пешеход может понять как означающее: «Вы уступаете мне и не переходите; так что я проеду». В некоторых примерах и, как объяснено выше, задержка, обратный отсчет или и то, и другое могут быть связаны со вторым семиотическим представлением, включаться в него и т.п.
[0232] Как упоминалось выше, подтверждение может указывать на замешательство или недопонимание. Например, AV может интерпретировать расположение рук пешехода по бокам тела с ладонями вверх и/или пожиманием плечами как знак того, что пешеход не понимает значения первого семиотического представления. Таким образом, второе семиотическое представление может передавать сообщение, которое разъясняет значение первого семиотического представления. Как также упоминалось выше, подтверждение может быть ожидаемым (например, неотвечающим) ответом. В одном примере второе семиотическое представление может передавать сообщение, которое пешеход может понять как означающее: «Я не знаю, что вы имеете в виду; так что я остановлюсь».
[0233] Специалист в данной области техники может понять, что второе семиотическое представление можно рассматривать как первое семиотическое представление. То есть процесс 6000 может на этапе 6400 принимать подтверждение второго семиотического представления, а на этапе 6500, в ответ на подтверждение, может управлять AV для пересечения части транспортной сети транспортных средств, что может включать в себя вывод, на этапе 6510, третьего семиотического представления. Такое повторяющееся взаимодействие обозначено пунктирной линией 6512. Таким образом, визуальное взаимодействие может осуществляться между человеком и автономным транспортным средством.
[0234] Хотя процесс 6000 и сопровождающие сценарии описываются для одного внешнего пользователя, возможно более одного внешнего пользователя. В простом примере семиотическое представление, которое предназначено для конкретного целевого внешнего пользователя, может включать в себя изображение (например, изображение, снятое посредством камеры AV). Таким образом, несмотря на то, что выводятся несколько семиотических представлений, целевой внешний пользователь может идентифицировать, что семиотическое представление предназначено для целевого внешнего пользователя, на основе изображения целевого внешнего пользователя.
[0235] В примере семиотическое представление, предназначенное для первого целевого внешнего пользователя, такое как семиотическое представление, выводимое на этапе 4510 на фиг. 4, первое семиотическое представление, выводимое на этапе 6300 на фиг. 6, второе семиотическое представления, выводимое на этапе 6510 на фиг. 6, любое семиотическое представление согласно реализациям этого раскрытия или их комбинация может быть основано на информации, относящейся ко второму внешнему пользователю. Информация, относящаяся ко второму внешнему пользователю, может быть гипотезой, связанной со вторым внешним пользователем. Гипотеза может быть такой, как описано в отношении модуля 5002 модели мира согласно фиг. 5. По существу, информация о траектории и/или состоянии, связанная с гипотезой, может отслеживаться в отношении второго внешнего пользователя. Траектория может включать в себя прогнозируемые местоположения второго внешнего пользователя на основе траектории. Траектория может быть путем второго внешнего пользователя.
[0236] Таким образом, процесс согласно реализациям этого раскрытия может идентифицировать первую траекторию внешнего пользователя (например, второго внешнего пользователя) и, в ответ на определение того, что первая траектория внешнего пользователя сходится со второй траекторией целевого внешнего пользователя, управлять AV для вывода для внешнего пользователя третьего семиотического представления на основе определения того, что первая траектория сходится со второй траекторией.
[0237] Например, предположим, что AV находится на пешеходном переходе и управляется, чтобы уступить дорогу пешеходу (то есть целевому внешнему пользователю). Гипотезу можно отслеживать посредством модуля модели мира ранспортного средства, управляемого человеком (т.е. внешнего пользователя). На основе первого прогнозируемого местоположения внешнего пользователя и второго прогнозируемого местоположения целевого внешнего пользователя может быть определено, что путь пешехода и траектория внешнего пользователя сходятся (например, на основе определения того, что пешеход и транспортное средством, управляемое человеком, согласно прогнозу будут в приблизительном местоположении в одно и то же время t=T0+dt, где T0 - текущее время, а dt - дискретное приращение времени в ближайшем будущем).
[0238] Таким образом, для внешнего пользователя может выводиться семиотическое представление, по существу указывающее управляемому человеком транспортному средству присутствие пешехода. Например, семиотическое представление может по существу сообщать управляемому человеком транспортному средству: «Притормози, там пешеход». В качестве альтернативы или в дополнение, для пешехода может выводиться семиотическое представление с указанием «СТОП! едет машина». По существу, AV может управляться для вывода для целевого внешнего пользователя четвертого семиотического представления на основе определения того, что первая траектория сходится со второй траекторией.
[0239] Фиг. 7 - схема примера интерактивной внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением для пересечения сценария остановки, чтобы уступить дорогу, в соответствии с реализациями этого раскрытия.
[0240] На фиг. 7, сценарий 7000 остановки, чтобы уступить дорогу, включает в себя транспортное средство 7100, такое как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, или любое другое транспортное средство, реализующее интерактивную внешнюю связь между транспортным средством и пользователем со встроенным семиотическим управлением, такое как автономное транспортное средство, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение, пересекающее часть текущей дороги (например, дороги 7200) на первой полосе 7202, рядом со второй полосой 7204. Транспортное средство 7100 находится на перекрестке 7210 с пересекающейся дорогой 7220. Сценарий 7000 остановки, чтобы уступить дорогу, включает в себя устройство 7400 управления движением для перекрестка 7210, внешний объект удаленного транспортного средства 7500, движущийся по дороге 7200 к перекрестку 7210 на второй полосе 7204, и внешние объекты пешеходов 7510.
[0241] Пересечение текущей части транспортной сети транспортных средств, показанной на фиг. 7, может включать в себя информацию идентификации о среде работы, указывающую, что текущая среда работы имеет состояние с ярким или дневным освещением, имеет влажную или дождливую погоду или состояние осадков, включает в себя жилой район, включает в себя внешние объекты, включает в себя внешние действия и включает в себя информацию конфигурации пользователя, указывающую низкий приоритет оптимизации управления транспортным средством.
[0242] Идентификация информации о среде работы может включать в себя идентификацию информации о внешней деятельности, такую как информация из социальных сетей, указывающая на концерт в парке жилого квартала рядом с дорогой 7200, например, смежно с ней, и во времени одновременно или близко текущему временному местоположению.
[0243] Аспекты текущей среды работы указаны на 7600. Например, яркое или дневное освещение указано как 7610, влажная или дождливая погода или состояние осадков указана как 7620, жилой район указан как 7630, присутствие внешних объектов указано как 7640, возникновение внешней деятельности указано как 7650, а информация конфигурации пользователя, указывающая низкий приоритет оптимизации управления транспортным средством, указана как 7660. Индикации 7610, 7620, 7630, 7640, 7650, 7660 показаны для простоты и ясности объяснения.
[0244] Например, для пересечения текущей части транспортной сети транспортных средств, показанной на фиг. 7, во временном местоположении, идентификация информации о среде работы может включать в себя идентификацию того, что первый пешеход 7512 блокирует транспортное средство 7100, что может указывать на то, что первый пешеход 7512 находится на перекрестке 7210 и имеет ожидаемый путь 9512, указывающий, что первый пешеход 7512 пересекает перекресток 7210, или иным образом определение того, что вероятность того, что текущее или ожидаемое пространственно-временное местоположение первого пешехода 7512 совпадает с ожидаемым пространственно-временным местоположением транспортного средства 7100, соответствующим одновременному движению через перекресток, превышает заданное пороговое значение.
[0245] Идентификация информации о среде работы может включать в себя определение того, что вероятность того, что текущее или ожидаемое пространственно-временное местоположение второго пешехода 7900 совпадает с ожидаемым пространственно-временным местоположением транспортного средства 7100, соответствующим одновременному движению через перекресток, превышает заданное пороговое значение. Например, модуль модели мира, такой как модуль 5002 модели мира согласно фиг. 5, может поддерживать гипотезу для второго пешехода 7900 о том, что второй пешеход 7900 намеревается пересечь перекресток. Ожидаемое пространственно-временное местоположение второго пешехода 7900 может быть вычислено посредством планировщика траектории, такого как планировщик 5004 траектории согласно фиг. 5.
[0246] Интерактивная внешняя связь транспортного средства с пользователем с интегрированным семиотическим управлением для пересечения сценария 7000 остановки, чтобы уступить дорогу, во временном местоположении может включать в себя идентификацию действия управления транспортным средством, что может быть аналогично идентификации действия управления транспортным средством, показанному позицией 4200 на фиг. 4, за исключением случаев, описанных здесь.
[0247] Например, для пересечения текущей части транспортной сети транспортных средств, показанной на фиг. 7 во временном местоположении может быть идентифицировано действие «Уступить-подождать» управления транспортным средством, соответствующее управлению транспортным средством 7100, чтобы оно оставалось неподвижным в соответствии с устройством 7400 управления движением на перекрестке 7210 и в соответствии с определением того, что вероятность того, что текущее или ожидаемое соответствующее пространственно-временное местоположение первого пешехода 7512, второго пешехода 7900 или обоих совпадает с ожидаемым пространственно-временным местоположением транспортного средства 7100, соответствующим одновременному движению через перекресток, превышает заданное пороговое значение.
[0248] Идентификация действия «Уступить-подождать» управления транспортным средством может включать в себя определение первичной основы управления транспортным средством в соответствии с определением того, что первый пешеход 7512 пересекает перекресток 7210, определением того, что второй пешеход 7900 пересекает перекресток 7210, или обоими способами, или что вероятность того, что текущее или ожидаемое соответствующее пространственно-временное местоположение первого пешехода 7512, второго пешехода 7900 или обоих совпадает с ожидаемым пространственно-временным местоположением транспортного средства 7100, соответствующим одновременному движению через перекресток, превышает заданное пороговое значение.
[0249] Интерактивная внешняя связь транспортного средства и пользователем с интегрированным семиотическим управлением для пересечения сценария 7000 остановки, чтобы уступить дорогу, во временном местоположении может включать в себя идентификацию информации о модификации управления транспортным средством, которая может быть аналогична идентификации информации о модификации управления транспортным средством, показанной позицией 4300 на фиг. 4, за исключением случаев, описанных здесь.
[0250] Например, пересечение текущей части транспортной сети транспортных средств, показанной на фиг. 7, во временном местоположении может включать в себя идентификацию информации о модификации управления транспортным средством для параметра управления транспортным средством «Показать обоснование «Уступить-подождать», соответствующего идентификации действия «Уступить-подождать» управления транспортным средством, первичной основе управления транспортным средством или и тому, и другому, что может указывать на одно или более параметров для вывода семиотического представления первичной основы управления транспортным средством.
[0251] Интерактивная внешняя связь транспортного средства с пользователем с интегрированным семиотическим управлением для пересечения сценария 7000 остановки, чтобы уступить дорогу, во временном местоположении может включать в себя идентификацию информации управления транспортным средством, которая может быть аналогичной идентификации информации управления транспортным средством, показанной позицией 4400 на фиг. 4, за исключением случаев, описанных в данном документе.
[0252] Например, для пересечения текущей части транспортной сети транспортных средств, показанной на фиг. 7, во временном местоположении, идентификация информации управления транспортным средством может включать в себя идентификацию значения параметра управления транспортным средством «Показать обоснование «Уступить-подождать», соответствующую идентификации действия «Уступить-подождать» управления транспортным средством, первичной основе управления транспортным средством или и тому, и другому, что может включать в себя идентификацию одного или нескольких параметров для вывода семиотического представления первичной основы управления транспортным средством.
[0253] Например, информация идентификации управления транспортным средством для пересечения сценария 7000 остановки, чтобы уступить дорогу, во временном местоположении может включать в себя идентификацию значения для параметров управления транспортным средством «Показать обоснование «Уступить-подождать», соответствующих идентифицированному действию «Уступить-подождать» управления транспортным средством, например на основе комбинации заданных значений параметров управления транспортным средством «Показать обоснование «Уступить-подождать», соответствующих идентифицированному действию «Уступить-подождать» управления транспортным средством, модификаторов управления транспортным средством «Показать обоснование «Уступить-подождать» состояния с ярким или дневным освещением, соответствующих идентифицированному действию «Уступить-подождать» управления транспортным средством, модификаторов управления транспортным средством «Показать обоснование «Уступить-подождать» влажной или дождливой погоды или состояния осадков, соответствующих идентифицированному действию «Уступить-подождать» управления транспортным средством, модификаторов управления транспортным средством «Показать обоснование «Уступить-подождать» жилого района, соответствующих идентифицированному действию «Уступить-подождать» управления транспортным средством, включения модификаторов управления транспортным средством «Показать обоснование «Уступить-подождать» внешних объектов, соответствующих идентифицированному действию «Уступить-подождать» управления транспортным средством, включения модификаторов управления транспортным средством «Показать обоснование «Уступить-подождать» внешних действий, соответствующих идентифицированному действию «Уступить-подождать» управления транспортным средством, и модификаторов управления транспортным средством с низким приоритетом оптимизации управления, соответствующих идентифицированному действию «Уступить-подождать» управления транспортным средством.
[0254] Интерактивная внешняя связь транспортного средства с пользователем со встроенным семиотическим управлением для пересечения сценария 7000 остановки, чтобы уступить дорогу, во временном местоположении может включать в себя управление транспортным средством 7100 для пересечения транспортной сети транспортных средств или ее части, что может быть аналогично пересечению, показанному на этапе 4500 на фиг. 4, за исключением описанного в данном документе, и может включать в себя управление транспортным средством 7100, чтобы оно оставалось неподвижным на перекрестке 7210 в соответствии с информацией управления транспортным средством, что может включать в себя вывод семиотического представления информации управления транспортным средством, который может включать вывод семиотического представления состояния работы транспортного средства одновременно с управлением транспортным средством для пересечения части транспортной сети транспортных средств в соответствии с информацией управления транспортным средством, вывод семиотического представления текущей первичной основы управления транспортным средством или и того, и другого.
[0255] Например, информация управления транспортным средством может включать в себя информацию для управления скоростью транспортного средства 7100 для вывода семиотического представления информации управления транспортным средством или его части, такой как часть, включающая в себя семиотическое представление состояния работы транспортного средства одновременно с управлением транспортным средством для пересечения части транспортной сети транспортных средств в соответствии с информацией управления транспортным средством, посредством управления транспортным средством 7100, чтобы оно оставалось неподвижным на перекрестке 7210 в соответствии с информацией управления транспортным средством, что может включать в себя использование блока управления скоростью транспортного средства 7100 в качестве устройства вывода или его часть для вывода семиотического представления или его части посредством управления блоком управления скоростью транспортного средства 7100 для вывода семиотического представления информации управления транспортным средством или его части, в соответствии с информацией управления транспортным средством, например, посредством вывода семиотического представления состояния работы транспортного средства одновременно с управлением транспортным средством для пересечения части транспортной сети транспортных средств в соответствии с информацией управления транспортным средством или ее частью, посредством управления скоростью ускорения, скоростью, временем выполнения действия управления скоростью транспортного средства или их комбинацией.
[0256] Управление блоком управления скоростью транспортного средства 7100 для вывода семиотического представления информации управления транспортным средством или его части в соответствии с информацией управления транспортным средством может включать в себя управление скоростью транспортного средства 7100, например, посредством поддержания стационарного состояния на перекрестке 7210 в соответствии с действием «Уступить-подождать» управления транспортным средством, модифицированным посредством соответствующей информации о модификации управления транспортным средством, которая может выводить по меньшей мере часть семиотического представления по меньшей мере части информации управления транспортным средством, указывающую, что транспортное средство уступает первому пешеходу 7512 и второму пешеходу 7900.
[0257] На фиг. 7, индикатор 7700 текущего намерения показан как включающий в себя последовательность индикаторов остановки и индикаторов уступки для указания того, что пересечение части транспортной сети транспортных средств, показанной на фиг. 7, может включать в себя вывод части семиотического представления управления транспортным средством 7100 для выполнения действия «Уступить-подождать» управления транспортным средством с использованием блока внешнего светового представления транспортного средства 7100 для указания предстоящего или ожидаемого состояния работы транспортного средства 7100, соответствующего управлению транспортным средством 7100 в соответствии с действием «Уступить-подождать» управления транспортным средством.
[0258] Хотя часть семиотического представления управления транспортным средством 7100 для выполнения вывода действия «Уступить-подождать» управления транспортным средством с использованием блока внешнего светового представления, показанного как 7700 на фиг. 7, аналогична части семиотического представления управления транспортным средством 7100 для выполнения вывода действия «Уступить-подождать» управления транспортным средством с использованием блока внешнего светового представления для временного периода, который может совпадать с временным периодом для вывода части семиотического представления управления транспортным средством 7100 для выполнения вывода действия «Уступить-подождать» управления транспортным средством посредством управления скоростью транспортного средства 7100 посредством замедления.
[0259] Часть семиотического представления управления транспортным средством 7100 для выполнения вывода действия «Уступить-подождать» управления транспортным средством с использованием блока внешнего светового представления может выводиться с использованием блока внешнего светового представления для временного периода, который может совпадать с временным период для вывода части семиотического представления управления транспортным средством 7100 для выполнения вывода действия «Уступить-подождать» управления транспортным средством посредством управления скоростью транспортного средства 7100 посредством поддержания стационарного состояния.
[0260] Управление транспортным средством 7100, чтобы оно оставалось неподвижным на перекрестке 7210 в соответствии с информацией управления транспортным средством, может включать в себя управление транспортным средством 7100 для вывода семиотического представления первичной основы управления транспортным средством. Например, индикатор 7800 текущего обоснования показан как включающий в себя первое представление пешехода, соответствующее первому пешеходу 7512, указанному посредством текущей первичной основы управления транспортным средством, и второе представление пешехода, соответствующее второму пешеходу 7900, указанному посредством текущей первичной основы управления транспортным средством. Относительное местоположение индикаторов пешеходов в индикаторе 7800 текущего обоснования может соответствовать местоположению первого пешехода 7512 и второго пешехода 7900 в транспортной сети транспортных средств относительно транспортного средства 7100.
[0261] В примере сценария 7000 остановки, чтобы уступить дорогу, второй пешеход 7900 может быть идентифицирован как целевой внешний пользователь, как описано в отношении 6200 на фиг. 6. Семиотическое представление может быть выведено для второго пешехода 7900, как описано в отношении 6300 на фиг. 6. Подтверждение может быть принято от второго пешехода 7900, как описано в отношении 6400 на фиг. 6. Как упоминалось выше, подтверждение может быть неявным или явным. В ответ на подтверждение можно управлять транспортным средством 7100 для пересечения перекрестка 7210, что может включать в себя вывод второго семиотического представления на основе подтверждения.
[0262] В примере сценария 7000 остановки, чтобы уступить дорогу, транспортное средство 7100 (более конкретно, модуль модели мира и/или планировщик траектории транспортного средства 7100) может определять, что соответствующие траектории, на основе соответствующих гипотез, удаленного транспортного средства 7500 и второго пешехода 7900 могут сходиться. Таким образом, транспортным средством 7100 можно управлять для вывода третьего семиотического представления, указывающего сходящиеся траектории. Как указано выше, третье семиотическое представление может выводиться одному или обоим, удаленному транспортному средству 7500 и второму пешеходу 7900. Например, третье семиотическое представление может быть нацелено на второго пешехода 7900, указывая на приближающееся удаленное транспортное средство 7500. Например, третье семиотическое представление может быть нацелено на удаленное транспортное средство 7500, указывая, что второй пешеход 7900 может находиться на пути удаленного транспортного средства 7500.
[0263] Интерактивная внешняя связь между транспортным средством и пользователем, описанная в данном документе, может использоваться для обеспечения взаимодействия между человеком и AV, где взаимодействия конкретно не связаны с пересечением части транспортной сети транспортных средств. В одном примере взаимодействия могут быть продолжением (например, после), пересечения AV части транспортной сети транспортных средств. AV может эксплуатироваться в контексте работы, который является контекстом работы сервиса. Примеры контекстов работы сервиса включают в себя, как упомянуто выше, контексты работы роботакси, роботизированную доставку и т.п.
[0264] Фиг. 8 - это блок-схема последовательности операций процесса 8000 для интерактивной внешней связи транспортного средства с пользователем с интегрированным семиотическим управлением в соответствии с реализациями этого раскрытия. Процесс 8000 может быть реализован в или посредством автономного транспортного средства (AV), такого как транспортное средство 1000, показанное на фиг. 1, или одно из транспортных средств 2100/2110, показанных на фиг. 2. AV может быть полуавтономным транспортным средством или любым другим транспортным средством, реализующим автономное вождение. Процесс 8000 может выполняться посредством процессора такого как процессор 1330 на фиг. 1), который выполнен с возможностью выполнения инструкций, хранящихся на не кратковременном считываемом компьютером носителе данных (таком как память 1340 на фиг. 1) для выполнения описанных ниже операций.
[0265] На этапе 8100 процесс 8000 идентифицирует контекст работы AV. Идентификация контекста работы может включать в себя определение параметров контекста работы.
[0266] В одном примере контекст работы может быть контекстом работы сервиса. Контекст работы сервиса таков, что AV выполнено с возможностью обеспечения сервиса клиенту. Неограничивающие примеры контекстов работы сервиса включают в себя сервис такси и сервис доставки еды. Параметры контекста работы сервиса могут включать в себя местоположение пункта назначения (например, адрес, такой как геолокация, пункта доставки; адрес, такой как геолокация, пункта получения). Параметры могут включать в себя другую информацию, которая может использоваться для идентификации получателя (т.е. первого внешнего пользователя) сервиса. Например, параметры могут включать в себя имя человека (т.е. второго внешнего пользователя), который должен получить сервис, номер телефона (например, полный номер телефона или частичный номер телефона, например, последние четыре цифры) человека, который должен получить сервис, номер телефона (или часть номера телефона) человека, запрашивающего сервис, более, менее, другие параметры или их комбинацию. В некоторых ситуациях первый внешний пользователь и второй внешний пользователь могут быть одним и тем же внешним пользователем.
[0267] Контекст работы может быть аварийным контекстом работы. Например, AV может включать в себя контроллеры и/или датчики самодиагностики. На основе самодиагностики AV может войти (например, установить контекст работы AV как) в аварийный контекст работы. То есть AV идентифицирует контекст работы как аварийный контекст работы.
[0268] Например, контроллер самодиагностики может определить, что AV испытало разрыв шины, и, соответственно, входит в аварийный контекст работы. Аварийный контекст работы может включать в себя пересечение транспортной сети транспортных средств или ее части, например, описанных со ссылкой на фиг. 4. Например, в случае разрыва шины AV может работать для включения правого сигнала (например, семиотического представления) и вывода сообщения «Я останавливаюсь» (например, семиотического представления) и пересечения части транспортной системы транспортных средств для безопасной остановки. Выявление аварийного контекста работы может включать в себя отправку диагностической информации аварийной придорожной службе и/или телеоператору (который может связаться с аварийной придорожной службой). Идентификация аварийного контекста работы может включать в себя прием идентификатора службы помощи на дороге, которая должна выполнять эту услугу на AV. Параметры аварийного контекста работы могут включать в себя название службы помощи на дороге, диагностическую информацию, описывающую аварийную ситуацию, более, менее, другие параметры или их комбинацию.
[0269] В другом примере контроллер самодиагностики может определить, что AV было вовлечено в аварию, и, соответственно, полиция может быть проинформирована об аварии. В одном примере телеоператор может получать диагностическую информацию и может информировать полицию; и/или AV, через интерфейс электронной связи, такой как интерфейс 1370 электронной связи согласно фиг. 1, может уведомить полицию. Полицию можно уведомить другими способами.
[0270] В ответ на идентификацию контекста работы внешнему пользователю может потребоваться взаимодействие с AV. Например, внешний пользователь может быть пассажиром сервиса роботакси; внешний пользователь может быть получателем доставляемой еды сервиса роботизированной доставки; внешний пользователь может быть специалистом по обслуживанию, который должен отремонтировать и/или заменить шину; или внешний пользователь может полицейским, реагирующим на аварию.
[0271] На этапе 8200 процесс 8000 подтверждает личность внешнего пользователя. В одном примере от внешнего пользователя может быть запрошен ввод для подтверждения личности внешнего пользователя. Для запроса ввода от внешнего пользователя может быть доступно несколько способов. Например, внешний пользователь может обеспечивать ввод через клавиатуру, микрофон, камеру и/или какое-либо другое устройство или периферийное устройство, которое может использоваться в качестве устройства ввода. AV может также включать в себя устройства или периферийные устройства для обеспечения информации и подсказок внешнему пользователю. Такие устройства или периферийные устройства могут включать в себя монитор, дисплей, динамик, более, менее других устройств вывода или их комбинацию.
[0272] Ввод, принятый от внешнего пользователя, можно сравнить с параметрами контекста работы. Например, можно использовать распознавание лиц. В примере камера AV может использоваться для получения изображения пользователя, которое можно сравнить с изображением внешнего пользователя в социальных сетях, с изображением профиля (например, профилем, который связан с контекстом работы) внешнего пользователя, с изображением, которое внешний пользователь обеспечил в то время, когда внешний пользователь запросил сервис контекста работы), или каким-либо другим изображением внешнего пользователя.
[0273] Например, может использоваться распознавание голоса. В примере микрофон AV может использоваться для получения образца голоса внешнего пользователя, который может быть сравнен с другим образцом голоса, который обеспечивается пользователем при заказе сервиса, образцом голоса профиля или каким-либо другим образцом голоса.
[0274] Например, может использоваться двухфакторная аутентификация. В иллюстративном примере внешнему пользователю может быть предложено ввести последние четыре цифры телефонного номера внешнего пользователя. Обеспеченные четыре цифры можно сравнить с последними четырьмя цифрами телефонного номера, который является параметром контекста работы, и, если сравнение приводит к совпадению, код проверки может быть отправлен на телефон внешнего пользователя. Внешний пользователь может ввести обеспеченный код проверки через устройство ввода (например, клавиатуру).
[0275] Другие примеры подтверждения личности внешнего пользователя могут быть доступны помимо описанных выше или в дополнение к ним. В еще одном примере код (например, штрих-код, QR-код и т.д.) может быть отправлен внешнему пользователю (например, на устройство внешнего пользователя). После представления кода устройству ввода AV личность пользователя может быть подтверждена.
[0276] На этапе 8300, в ответ на подтверждение личности внешнего пользователя, процесс 8000 может обеспечить внешнему пользователю доступ к аспекту AV на основе контекста работы. В одном примере обеспечение внешнему пользователю доступа к аспекту AV на основе контекста работы может включать в себя разблокировку двери (так, чтобы, например, внешний пользователь мог войти). В одном примере обеспечение внешнему пользователю доступа к аспекту AV может включать в себя отверстие, например окно, чтобы внешний пользователь мог принять (например, извлечь, завладеть) объекты, доставленные внешнему пользователю. В одном примере обеспечение внешнему пользователю доступа к аспекту AV может включать в себя обеспечение доступа к другому физическому аспекту AV, например, разблокирование багажника, чтобы обслуживающий персонал мог получить запасную шину.
[0277] В другом примере обеспечение внешнему пользователю доступа к аспекту AV может включать в себя и/или может дополнительно включать в себя инициирование сеанса связи между внешним пользователем и удаленным оператором. Например, после доставки доставляемого товара внешний пользователь может получить запрос, удовлетворен ли пользователь сервисом. Внешний пользователь может указать, что услуга была неполной. Пользователь может указать, что услуга была неполной, несколькими способами. В иллюстративном примере пользователю может отображаться форма ввода, предлагающая пользователю ответить на вопросы, относящиеся к услуге. Например, в случае доставки еды внешний пользователь может быть запрошен относительно того, соответствует ли доставленная еда заказанной еде, хорошего ли она качества, полноте и так далее. Внешнему пользователю также может быть обеспечена возможность подключения к удаленному оператору (например, представителю службы поддержки клиентов), который может рассматривать жалобы внешнего пользователя в отношении сервиса. Соответственно, процесс 8000 может инициировать сеанс связи между внешним пользователем и удаленным оператором.
[0278] Точно так же в случае аварийного контекста работы внешний пользователь (например, полицейский) может инициировать сеанс связи с удаленным оператором, который может предоставить дополнительную помощь внешнему пользователю.
[0279] Как используется в данном документе, терминология «компьютер» или «вычислительное устройство» включает в себя любой блок или комбинацию блоков, выполненных с возможностью выполнения любого способа, или любой его части или части, раскрытой в данном документе.
[0280] Используемый здесь термин «процессор» обозначает один или более процессоров, таких как один или более процессоров специального назначения, один или более процессоров цифровых сигналов, один или более микропроцессоров, один или более контроллеров, один или более микроконтроллеров, одно или более процессоров приложений, одна или более специализированных интегральных схем (ASIC - Application Specific Integrated Circuit), одна или более стандартных микросхем специального применения (ASSP - Application Specific Standard Products), одна или более программируемых пользователем вентильных матриц (FPGA - Field Programmable Gate Arrays), любой другой тип или комбинация интегральных микросхем, один или более конечных автоматов или любая их комбинация.
[0281] Используемый здесь термин «память» означает любой используемый компьютером или считываемый компьютером носитель данных или устройство, которое может материально содержать, хранить, передавать или переносить любой сигнал или информацию, которые могут использоваться любым процессором или в связи с ним. Например, запоминающее устройство может быть одним или несколькими постоянными запоминающими устройствами (ROM - read only memory), одним или несколькими оперативными запоминающими устройствами (RAM - random access memory), одним или несколькими регистрами, запоминающими устройствами с низкой мощностью с двойной скоростью передачи данных (LPDDR - low power double data rate memory), одной или несколькими кэш-памятью, одним или несколькими полупроводниковыми запоминающими устройствами, одним или несколькими магнитными носителями, одним или несколькими оптическими носителями, одним или несколькими магнитно-оптическими носителями или любой их комбинацией.
[0282] Используемая здесь терминология «инструкции» может включать в себя указания или выражения для выполнения любого способа или любой его части или частей, раскрытых в данном документе, и может быть реализована в аппаратных средствах, программном обеспечении или любой их комбинации. Например, инструкции могут быть реализованы в виде информации, такой как компьютерная программа, хранимая в памяти, которая может выполняться посредством процессора для выполнения любого из соответствующих способов, алгоритмов, аспектов или их комбинаций, как описано в данном документе. Инструкции или их часть могут быть реализованы в виде специального процессора или схемы, которая может включать в себя специализированное оборудование для выполнения любого из способов, алгоритмов, аспектов или их комбинаций, как описано в данном документе. В некоторых реализациях части инструкций могут быть распределены между несколькими процессорами на одном устройстве, на нескольких устройствах, которые могут обмениваться данными напрямую или через сеть, такую как локальная сеть, глобальная сеть, Интернет или их комбинация.
[0283] Используемые здесь термины «пример», «вариант», «реализация», «аспект», «признак» или «элемент» указывают на то, что они служат в качестве примера, экземпляра или иллюстрации. Если явно не указано иное, любой пример, вариант осуществления, реализация, аспект, признак или элемент не зависят от каждого другого примера, варианта осуществления, реализации, аспекта, признака или элемента и могут использоваться в сочетании с любым другим примером, вариантом осуществления, реализацией, аспектом, признаком или элементом.
[0284] Используемые здесь термины «определять» и «идентифицировать» или любые их вариации включают в себя выбор, уточнение, вычисление, поиск, прием, определение, установление, получение или иное идентифицирование или определение любым способом, каким бы то ни было образом, используя одно или несколько устройств, показанных и описанных здесь.
[0285] Используемая здесь терминология «или» предназначена для обозначения включающего «или», а не исключающего «или». То есть, если не указано иное или не ясно из контекста, «X включает в себя A или B» предназначено для обозначения любой из естественных включающих перестановок. То есть, если X включает в себя A; X включает в себя B; или X включает в себя как A, так и B, тогда «X включает в себя A или B» удовлетворяется в любом из вышеупомянутых случаев. Кроме того, признаки единственного числа, используемые в данной заявке и прилагаемой формуле изобретения, обычно следует толковать как означающие «один или несколько», если не указано иное или не ясно из контекста, чтобы они были направлены на единственное число.
[0286] Кроме того, для простоты объяснения, хотя фигуры и описания в данном документе могут включать в себя последовательности или серии этапов, элементы способов, раскрытых в данном документе, могут происходить в различном порядке или одновременно. Кроме того, элементы способов, раскрытых в данном документе, могут иметь место с другими элементами, явно не представленными и не описанными в данном документе. Кроме того, не все элементы описанных здесь способов могут потребоваться для реализации способа в соответствии с этим раскрытием. Хотя аспекты, признаки и элементы описаны в данном документе в конкретных комбинациях, каждый аспект, признак или элемент могут использоваться независимо или в различных комбинациях с другими аспектами, признаками и элементами или без них.
[0287] Хотя раскрытие было описано в связи с определенными вариантами осуществления, следует понимать, что раскрытие не должно ограничиваться раскрытыми вариантами осуществления, а, напротив, предназначено для охвата различных модификаций и эквивалентных устройств, включенных в объем прилагаемой формулы изобретения, объем которой должен соответствовать самой широкой интерпретации, чтобы охватить все такие модификации и эквивалентные структуры, которые разрешены законом.
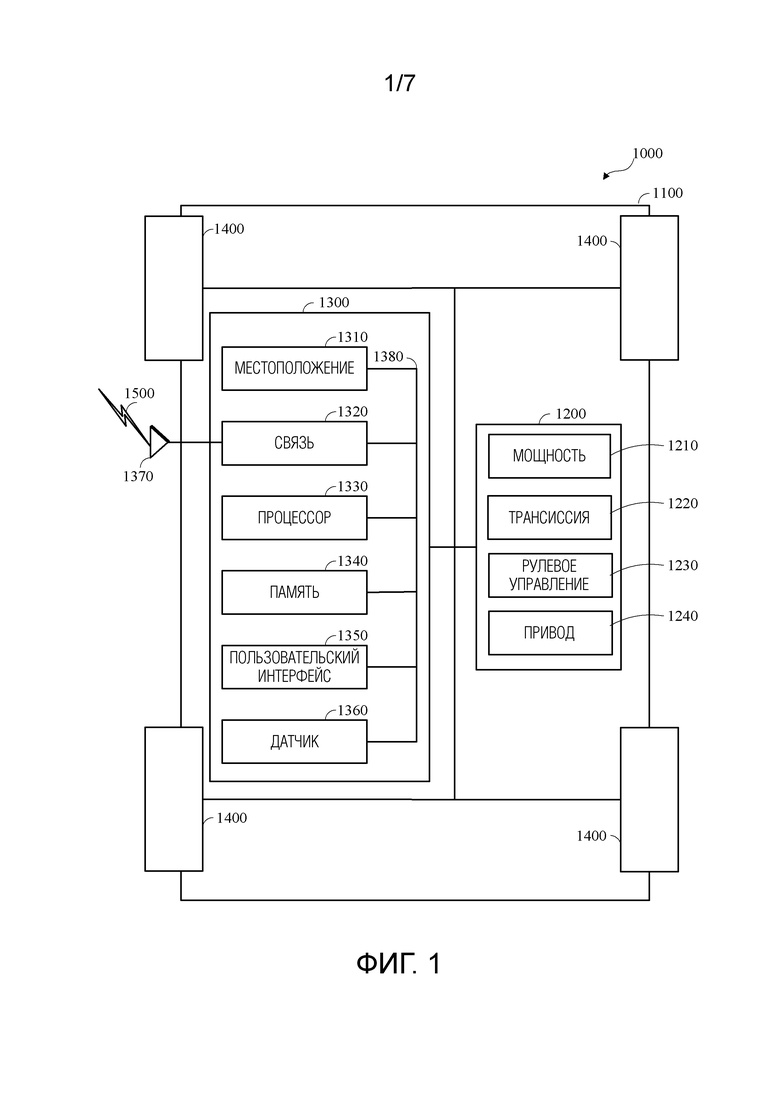
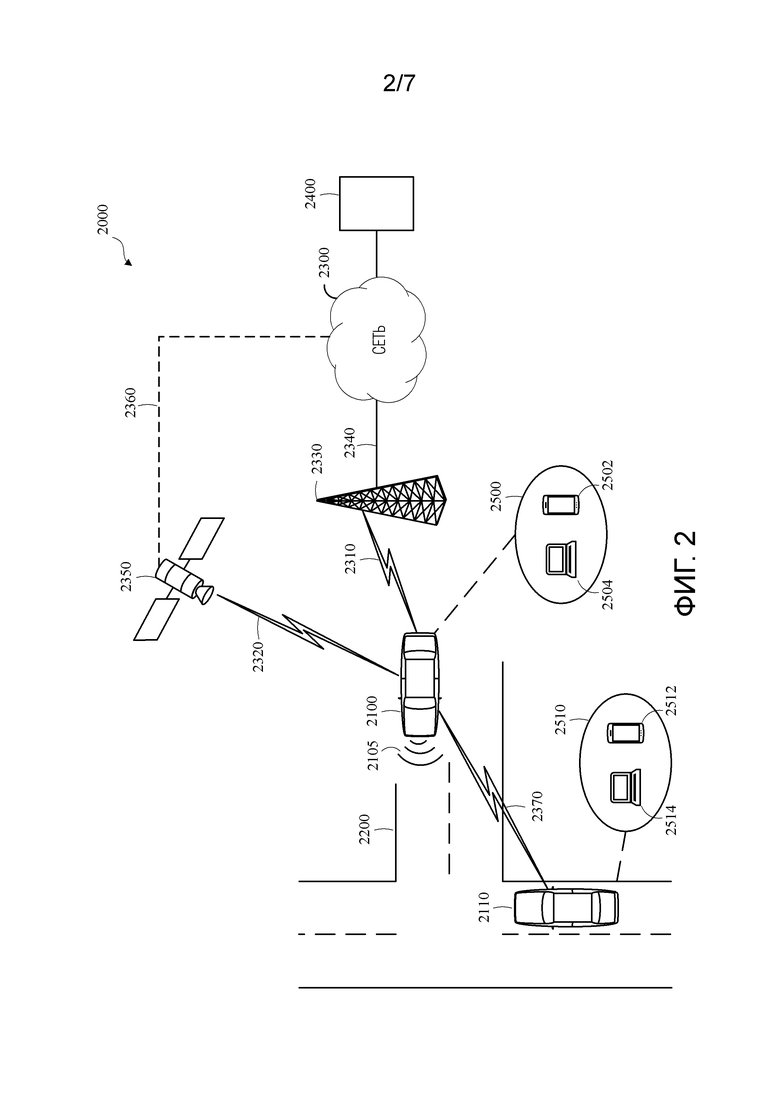
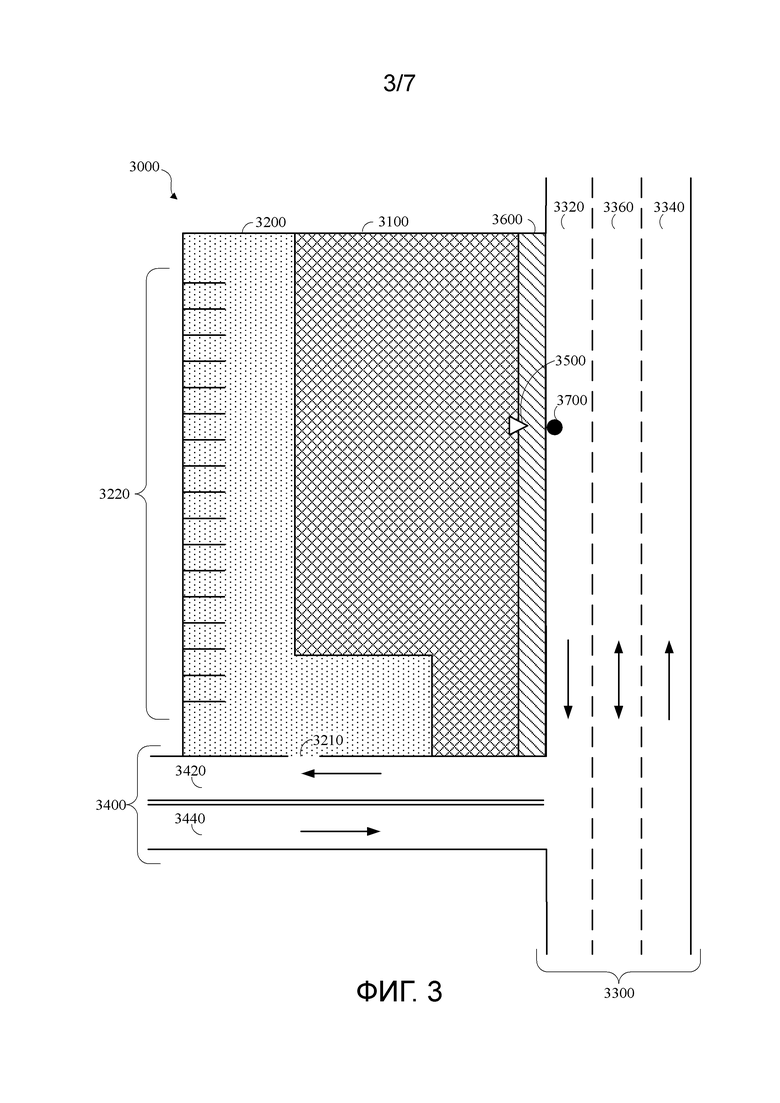
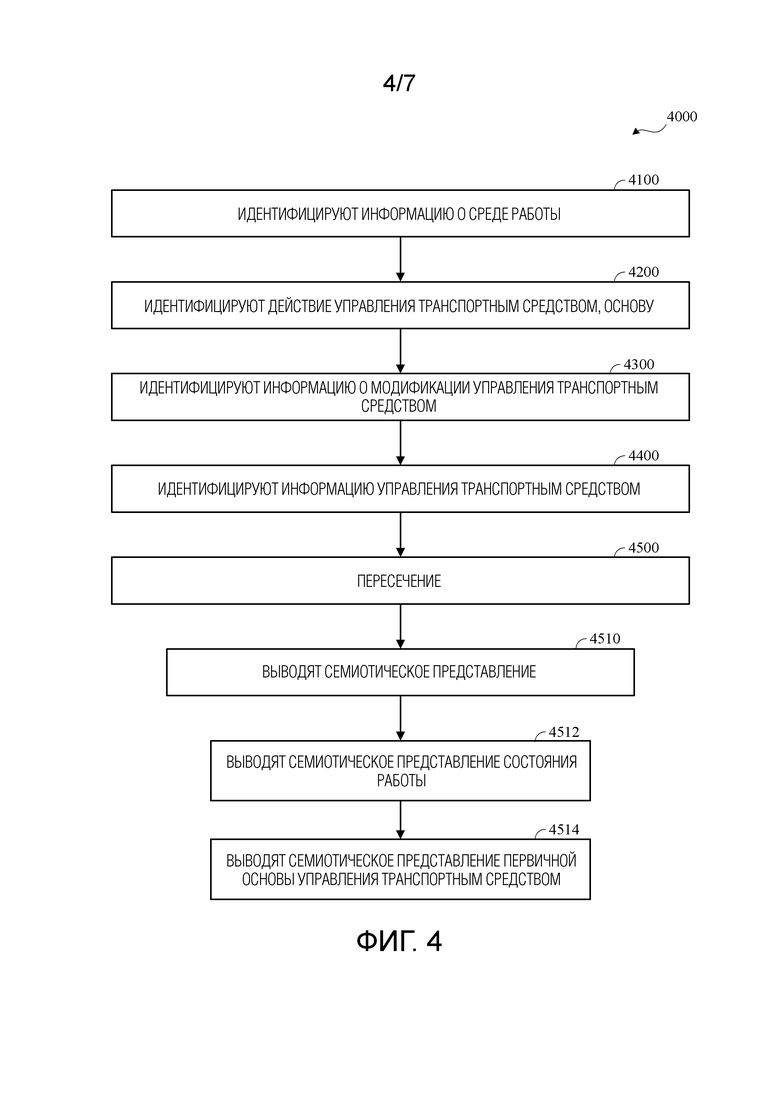
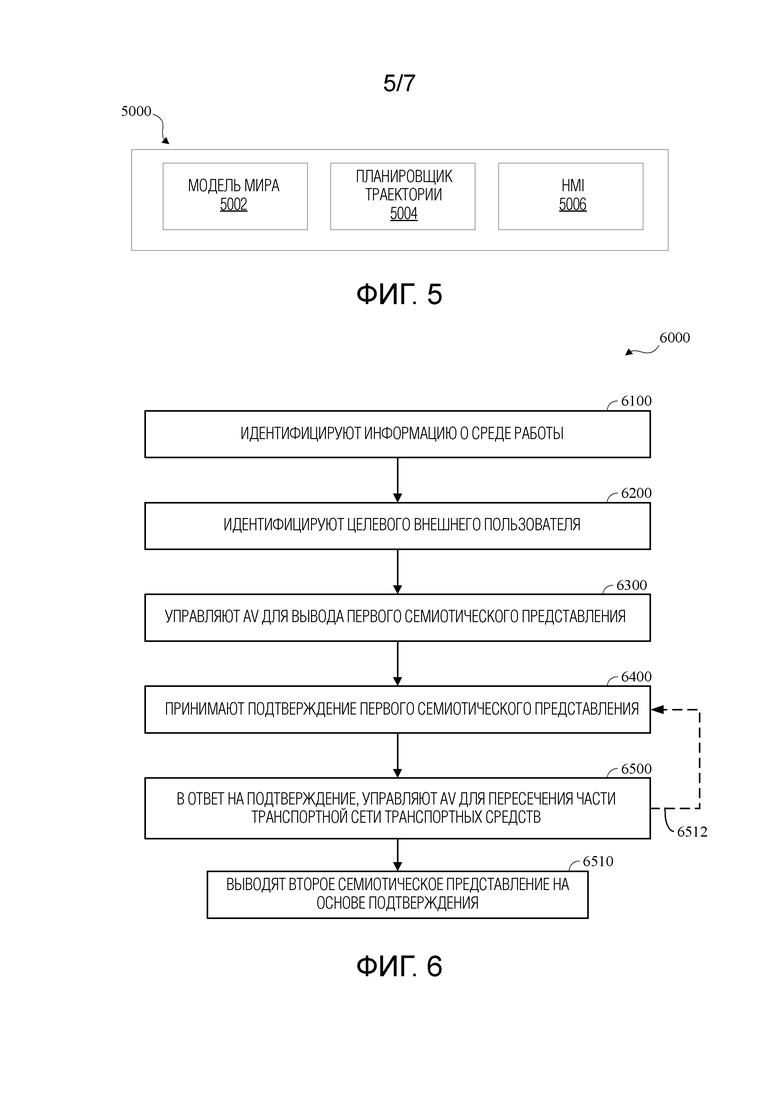
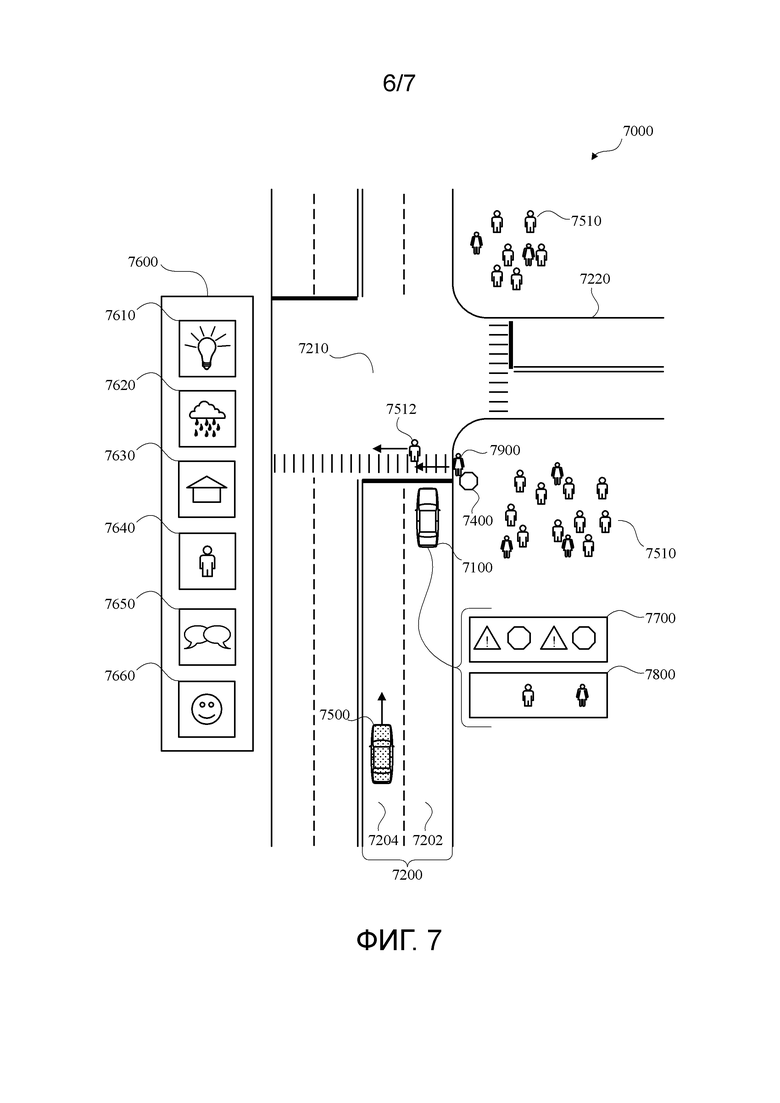
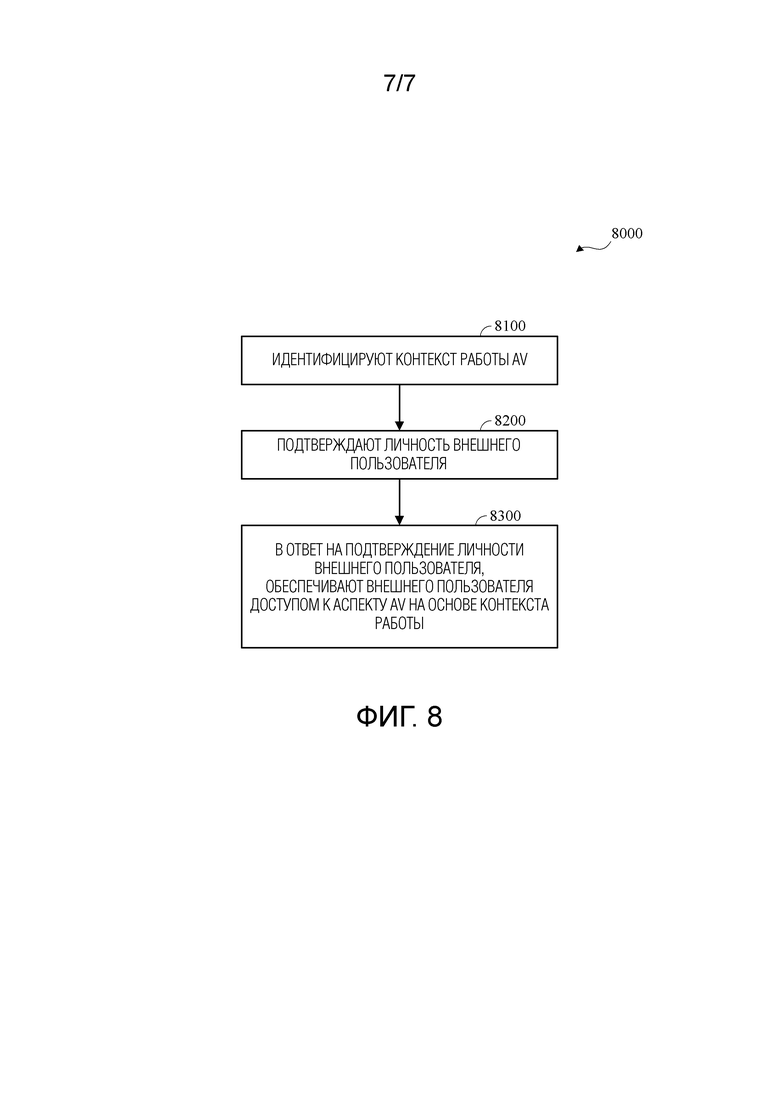
Изобретение относится к управлению работой транспортного средства. Автономное транспортное средство (AV) содержит процессор, выполненный с возможностью выполнения инструкций для идентификации информации о среде работы, представляющей идентифицированный аспект текущей среды работы, идентификации целевого внешнего пользователя на основе текущей среды работы для AV, управления AV для вывода для целевого внешнего пользователя первого семиотического представления информации управления AV, связанной с информацией о среде работы. Прием подтверждения первого семиотического представления от целевого внешнего пользователя и в ответ на подтверждение управления AV для вывода второго семиотического представления на основе подтверждения от целевого внешнего пользователя. Способ пересечения части транспортной сети транспортных средств посредством автономного транспортного средства (AV) содержит этапы, на которых идентифицируют информацию о среде работы, идентифицируют целевого внешнего пользователя на основе текущей среды работы для AV, управляют AV для вывода для целевого внешнего пользователя первого семиотического представления информации управления AV, принимают подтверждение первого семиотического представления от целевого внешнего пользователя. Достигается повышение безопасности. 2 н. и 14 з.п. ф-лы, 8 ил., 2 табл.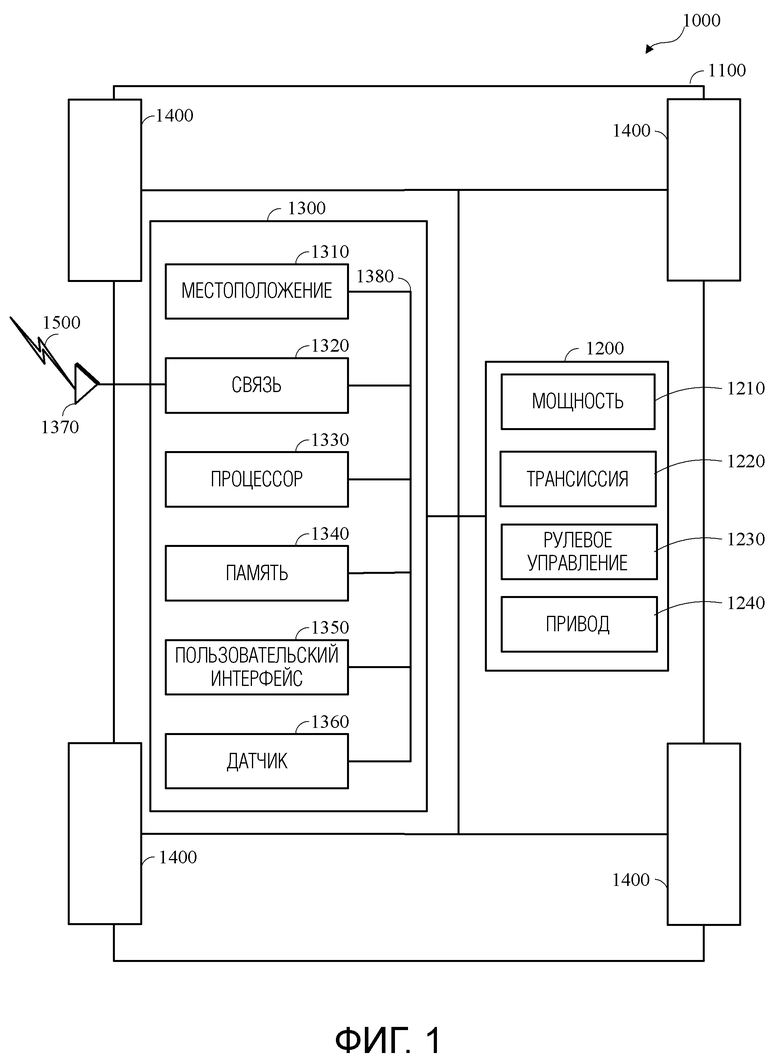
1. Автономное транспортное средство (AV), выполненное с возможностью пересечения части транспортной сети транспортных средств, при этом AV содержит:
процессор, выполненный с возможностью выполнения инструкций, сохраненных на не кратковременном считываемом компьютером носителе данных, для:
идентификации информации о среде работы, представляющей текущую среду работы для AV, так что информация о среде работы включает в себя информацию, представляющую идентифицированный аспект текущей среды работы;
идентификации целевого внешнего пользователя на основе текущей среды работы для AV, целевой внешний пользователь идентифицируется на основе информации датчика от датчика AV;
управления AV для вывода для целевого внешнего пользователя первого семиотического представления информации управления AV, связанной с информацией о среде работы;
приема подтверждения первого семиотического представления от целевого внешнего пользователя; и
в ответ на подтверждение управления AV для вывода второго семиотического представления на основе подтверждения от целевого внешнего пользователя, при этом второе семиотическое представление содержит подтверждение подтверждения, а намерение транспортного средства основано на подтверждении.
2. AV по п. 1, в котором процессор выполнен с возможностью выполнения инструкций для управления AV для вывода второго семиотического представления посредством управления устройством вывода AV для вывода по меньшей мере части второго семиотического представления, при этом устройство вывода включает в себя по меньшей мере один из блока внешнего светового представления автономного транспортного средства, блока внешнего звукового представления AV, блока управления состоянием направленности AV или блока управления кинетическим состоянием AV.
3. AV по п. 1, в котором подтверждение от целевого внешнего пользователя является неявным подтверждением; и
при этом подтверждение подтверждения является интерпретацией неявного подтверждения.
4. AV по п. 3, в котором процессор дополнительно выполнен с возможностью выполнения инструкций для:
управления AV для пересечения части транспортной сети транспортных средств в соответствии с намерением транспортного средства.
5. AV по п. 1, в котором первое семиотическое представление содержит начальное намерение транспортного средства и основу намерения транспортного средства начального намерения транспортного средства.
6. AV по п. 1, в котором подтверждение от целевого внешнего пользователя является явным подтверждением.
7. AV по п. 1, в котором второе семиотическое представление содержит информационное сообщение.
8. AV по п. 1, в котором процессор дополнительно выполнен с возможностью выполнения инструкций для:
определения первой траектории внешнего пользователя; и
в ответ на определение того, что первая траектория внешнего пользователя сходится со второй траекторией целевого внешнего пользователя, управления AV для вывода для внешнего пользователя третьего семиотического представления на основе определения того, что первая траектория сходится со второй траекторией.
9. AV по п. 8, в котором процессор дополнительно выполнен с возможностью выполнения инструкций для:
управления AV для вывода для целевого внешнего пользователя четвертого семиотического представления на основе определения того, что первая траектория сходится со второй траекторией целевого внешнего пользователя.
10. Способ пересечения части транспортной сети транспортных средств посредством автономного транспортного средства (AV), содержащий этапы, на которых:
идентифицируют информацию о среде работы, представляющую текущую среду работы для AV, так что информация о среде работы включает в себя информацию, представляющую идентифицированный аспект текущей среды работы;
идентифицируют целевого внешнего пользователя на основе текущей среды работы для AV, целевой внешний пользователь идентифицируется на основе информации датчика от датчика AV;
управляют AV для вывода для целевого внешнего пользователя первого семиотического представления информации управления AV, связанной с информацией о среде работы;
принимают подтверждение первого семиотического представления от целевого внешнего пользователя; и
в ответ на подтверждение управляют AV для вывода второго семиотического представления на основе подтверждения от целевого внешнего пользователя, при этом второе семиотическое представление содержит подтверждение подтверждения, а намерение транспортного средства основано на подтверждении.
11. Способ по п. 10, в котором управление AV для вывода второго семиотического представления содержит этап, на котором:
управляют устройством вывода AV для вывода по меньшей мере части второго семиотического представления, при этом устройство вывода включает в себя по меньшей мере один из блока внешнего светового представления автономного транспортного средства, блока внешнего звукового представления AV, блока управления состоянием направленности AV или блока управления кинетическим состоянием AV.
12. Способ по п. 10,
в котором этап подтверждение от целевого внешнего пользователя является неявным подтверждением от целевого внешнего пользователя; и
при этом подтверждение подтверждения является интерпретацией неявного подтверждения.
13. Способ по п. 12, дополнительно содержащий этап, на котором:
управляют AV для пересечения части транспортной сети транспортных средств в соответствии с намерением транспортного средства.
14. Способ по п. 10, в котором первое семиотическое представление содержит начальное намерение транспортного средства и основу начального намерения транспортного средства.
15. Способ по п. 10, в котором подтверждение от целевого внешнего пользователя является явным подтверждением.
16. Способ по п. 10, в котором второе семиотическое представление содержит информационное сообщение.
| US 9335766 B1, 10.05.2016 | |||
| JP 6288590 B2, 07.03.2018 | |||
| US 8799201 B2, 05.08.2014. |

