Данное изобретение относится к способам испытаний на механические воздействия (вибрационные испытания) и может быть использовано при испытаниях на вибрационные воздействия различной бортовой аппаратуры космических аппаратов.
В настоящее время вибрационные испытания являются наиболее распространенным видом механических испытаний. Способы проведения вибрационных испытаний достаточно подробно излагаются в различной литературе. Например, вибрационные испытания по методу качающейся частоты при испытаниях на гармоническую вибрацию (ГВ), когда частоту вибрации плавно изменяют в заданном диапазоне частот от нижней границы частоты к верхней и обратно при постоянстве заданных параметров вибрации в течение определенного времени. Или испытания на широкополосную случайную вибрацию (ШСВ). Испытания проводятся на заранее заданных (нормированных) режимах (Испытательная техника. Справочник в 2-х т./ Под ред. Клюева В.В., т.2М.: Машиностроение, 1982, стр.286-289).
Наиболее близким (прототипом) является способ испытаний бортовой аппаратуры космических аппаратов на вибрационные воздействия (патент РФ №2476845), заключающийся в предварительном определении собственных частот аппаратуры и нагружении заранее заданным нормированным воздействием с последующей корректировкой задающего воздействия из условия не превышения допустимых режимов нагружения аппаратуры.
Недостатком такого способа испытаний является то, что при испытаниях достаточно большого ряда приборов и аппаратуры контрольные датчики не могут быть установлены в точках с максимальными откликами. Например, для герметичной аппаратуры, внутри которой установка датчиков недопустима (нарушается герметичность), или на платах с плотной компоновкой (нет места для установки контрольных датчиков). В результате чего режимы испытаний формируются с большой погрешностью, что может привести к отказам бортовой аппаратуры (это особенно опасно при проведении приемочных испытаний штатной бортовой аппаратуры).
Для заявленного способа выявлены следующие общие с прототипом существенные признаки: способ испытаний бортовой аппаратуры космических аппаратов на вибрационные воздействия, заключающийся в предварительном определении собственных частот аппаратуры и нагружении заранее заданным нормированным воздействием с последующей корректировкой задающего воздействия из условия не превышения допустимых режимов нагружения аппаратуры.
Технической проблемой, решаемой данным изобретением, является возможность более точного воспроизведения допустимой вибрационной нагрузки при вибрационных испытаниях, что позволит качественней проводить вибрационные испытания, исключит возможность недопустимого нагружения (перегружения) электронных компонентов и конструкции бортовой аппаратуры.
Указанная проблема решается тем, что в способе испытаний бортовой аппаратуры космических аппаратов на вибрационные воздействия, заключающемся в предварительном определении собственных частот аппаратуры и нагружении заранее заданным нормированным воздействием с последующей корректировкой задающего воздействия из условия не превышения допустимых режимов нагружения аппаратуры, согласно заявленному изобретению, точки с максимальными откликами бортовой аппаратуры получают расчетным путем с использованием метода конечных элементов, после чего, из результатов конечно элементного моделирования и физической возможности установки контрольных датчиков, определяют места для установки контрольных датчиков при вибрационных испытаниях, вычисляют передаточные функции от точек с максимальными откликами к точкам контроля в каждом из частотных поддиапазонов, в каждом из трех взаимно перпендикулярных направлений, устанавливают контрольные датчики, затем проводят нагружение бортовой аппаратуры на минимальном уровне, обеспечивающем регистрацию откликов в местах установки контрольных датчиков, оценивают нагружение бортовой аппаратуры в точках с максимальными откликами, сравнивают с допустимыми и при ожидаемом превышении допустимых уровней последовательно проводят корректировку входного воздействия в каждом из трех взаимно перпендикулярных направлений с учетом полученных передаточных функций по формуле:


для испытаний на гармоническую вибрацию и (1)


при испытаниях на широкополосную случайную вибрацию,
где B(fx,y,z) – задаваемый режим нагружения бортовой аппаратуры в точках крепления аппаратуры к оснастке, для каждого из трех взаимно перпендикулярных направлений x,y,z;
A(fx,y,z) – режим нагружения бортовой аппаратуры в виде гармонической вибрации последовательно сформированный для каждого из трех взаимно перпендикулярных направлений x,y,z;
 – режим нагружения бортовой аппаратуры в виде широкополосной случайной вибрации, последовательно сформированный для каждого из трех взаимно перпендикулярных направлений x,y,z;
– режим нагружения бортовой аппаратуры в виде широкополосной случайной вибрации, последовательно сформированный для каждого из трех взаимно перпендикулярных направлений x,y,z;
Wi,x,y,z(fk) – режим нагружения бортовой аппаратуры в “i” контрольной точке в “k” частотном диапазоне для каждого из трех взаимно перпендикулярных направлений x,y,z;
Hij,x,y,z(fk) – передаточная функция от “i” контрольной точки к “j” точке с максимальными откликами бортовой аппаратуры в “k” частотном диапазоне для каждого из трех взаимно перпендикулярных направлений x,y,z;
Qj,x,y,z(fk) – передаточная функция от “j” контрольной точки к плоскости задания режима нагружения бортовой аппаратуры в “k” частотном диапазоне для каждого из трех взаимно перпендикулярных направлений x,y,z;
fk – значение частоты в ‘k” частотном диапазоне с максимальной величиной отклика;
L – количество контрольных точек;
N – количество частотных поддиапазонов;
M – количество точек с максимальными откликами,
после чего вибрационные испытания бортовой аппаратуры проводят последовательно в каждом из трех взаимно перпендикулярных направлениях на сформированных режимах.
Суть заявляемого изобретения может быть пояснена следующим образом.
В процессе проектирования бортовой аппаратуры разрабатывают подробные конечно-элементные модели аппаратуры. Такие модели позволяют получить максимальные отклики и соответствующие им частоты в различных точках аппаратуры и определить места установки контрольных датчиков при испытаниях. В то же время физическая возможность установки контрольных датчиков ограничена рядом причин: это может быть необходимость сохранения герметичности прибора, либо на плате нет места для установки контрольных датчиков в точках с максимальными откликами и т.п. В этом случае определяют набор контрольных точек, где могут быть установлены датчики ускорений (акселерометры), по которым и производят оценку нагружения аппаратуры. Но оценку проводят не напрямую, а расчетно-экспериментальным методом с учетом передаточных функций, показывающих изменение нагружения аппаратуры в точках с максимальными откликами и в точках контроля, что в дальнейшем позволяет проводить корректировку режимов нагружения аппаратуры.
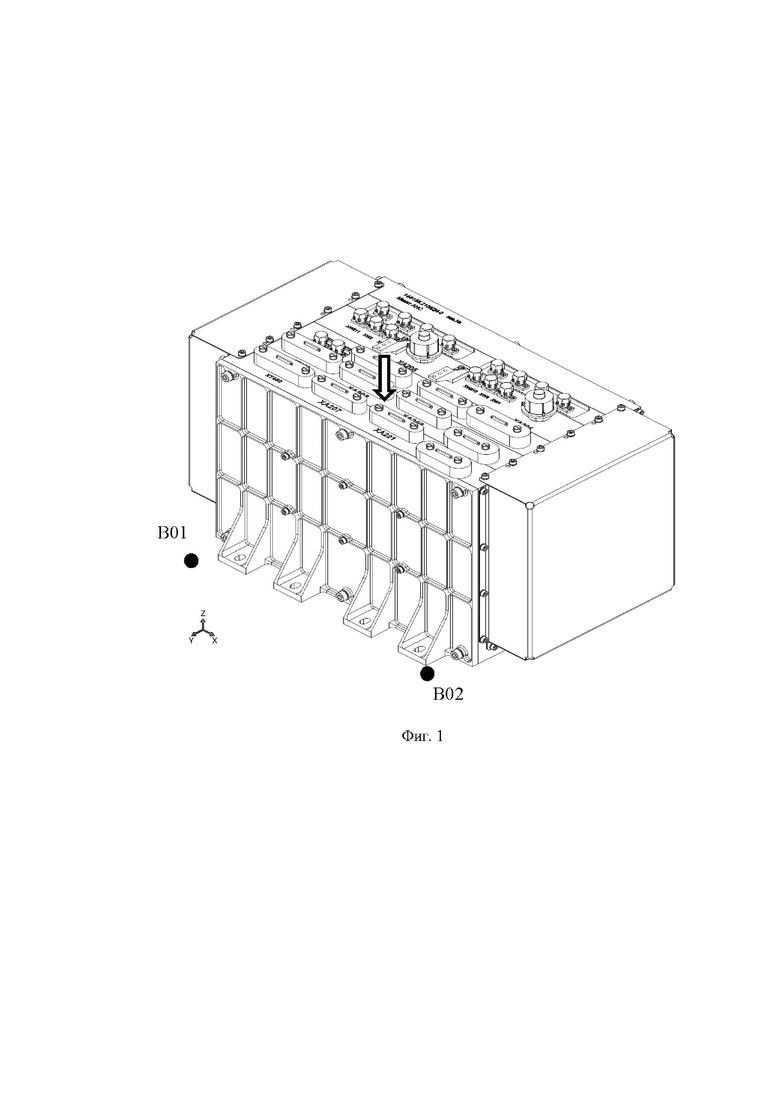
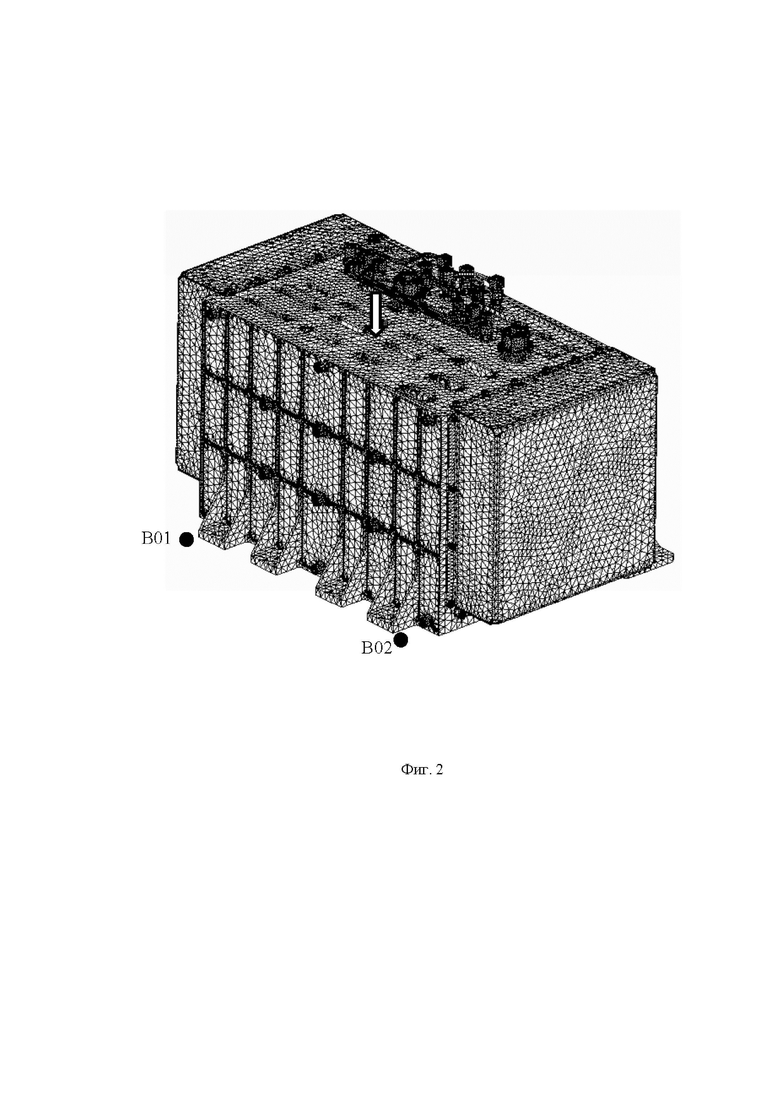
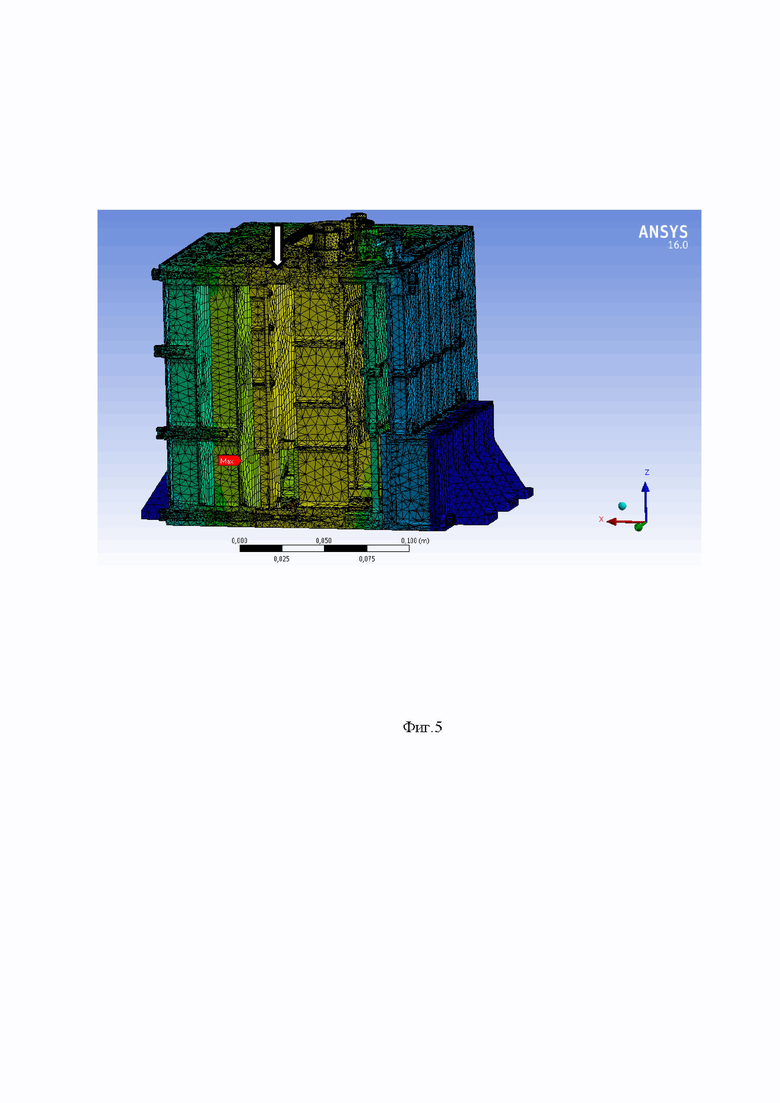
На фиг.1 показан типовой прибор, а на фиг.2 его конечно-элементная модель (КЭМ). КЭМ прибора состоит из 1319610 узлов и 657514 элементов, что позволяет выполнить расчет в заданном диапазоне частот до 2кГц (расчеты были выполнены в пакете ANSYS Workbench v.16). Сначала выполняют расчеты в заданном частотном диапазоне, получают формы и частоты прибора, затем получают отклики в виде амплитудно-частотных характеристик прибора, и выделяют точки с максимальными уровнями откликов для получения точек установки контрольных датчиков.
В случае, когда точки с максимальными откликами позволяют провести установку контрольных датчиков, то вырезания проводятся по общепринятой процедуре. Когда же точки с максимальными уровнями отклика и точки установки контрольных датчиков не совпадают, получают передаточные функции от точек с максимальными откликами к точкам контроля и от точек контроля к точкам задания режимов нагружения. Это позволяет получить передаточную функцию от точек задания режима к точкам с максимальными откликами (с учетом результатов измерений).
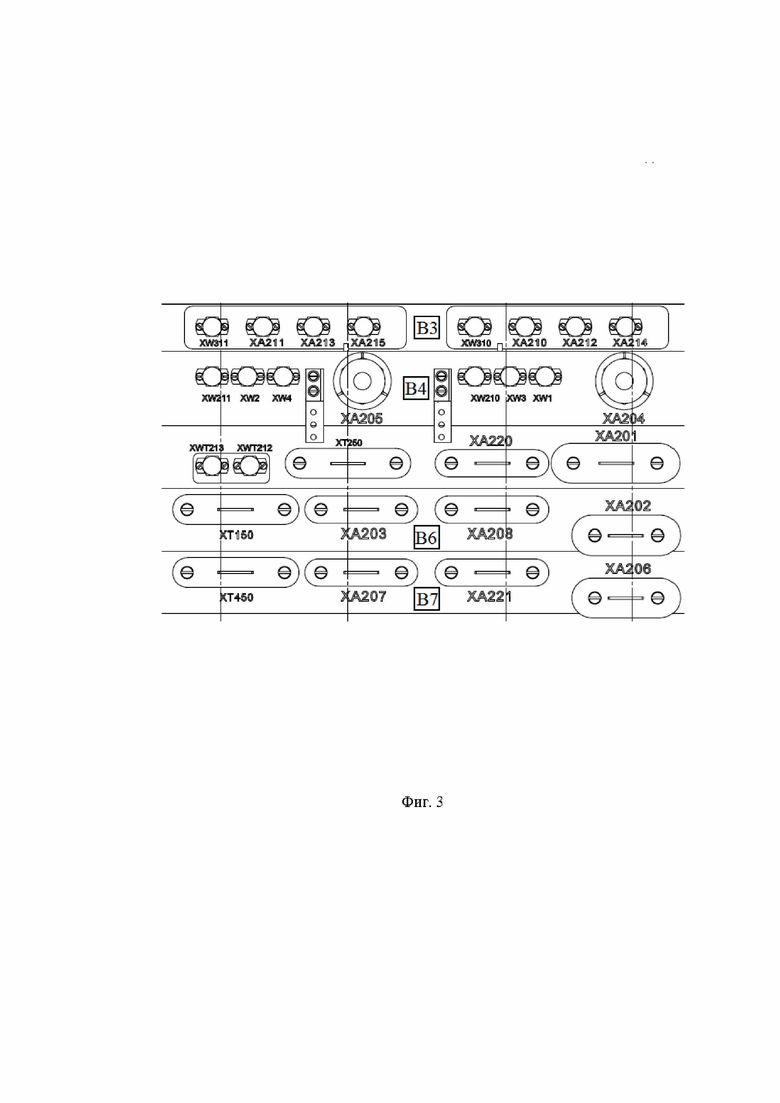
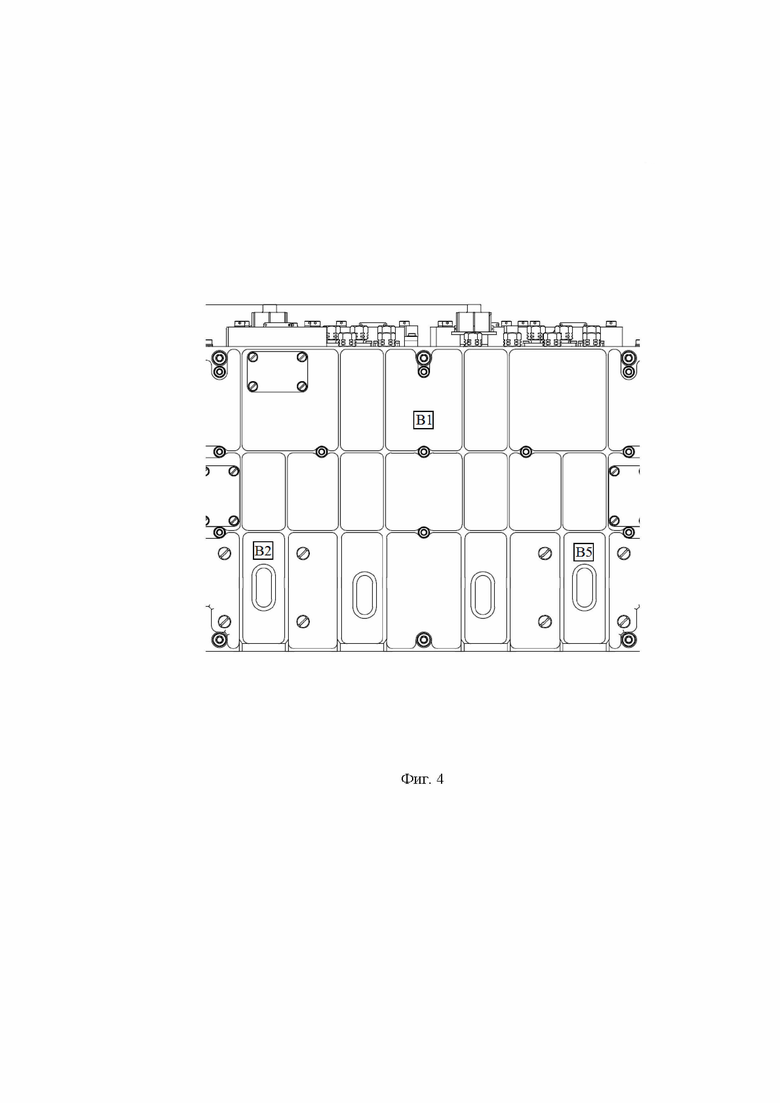
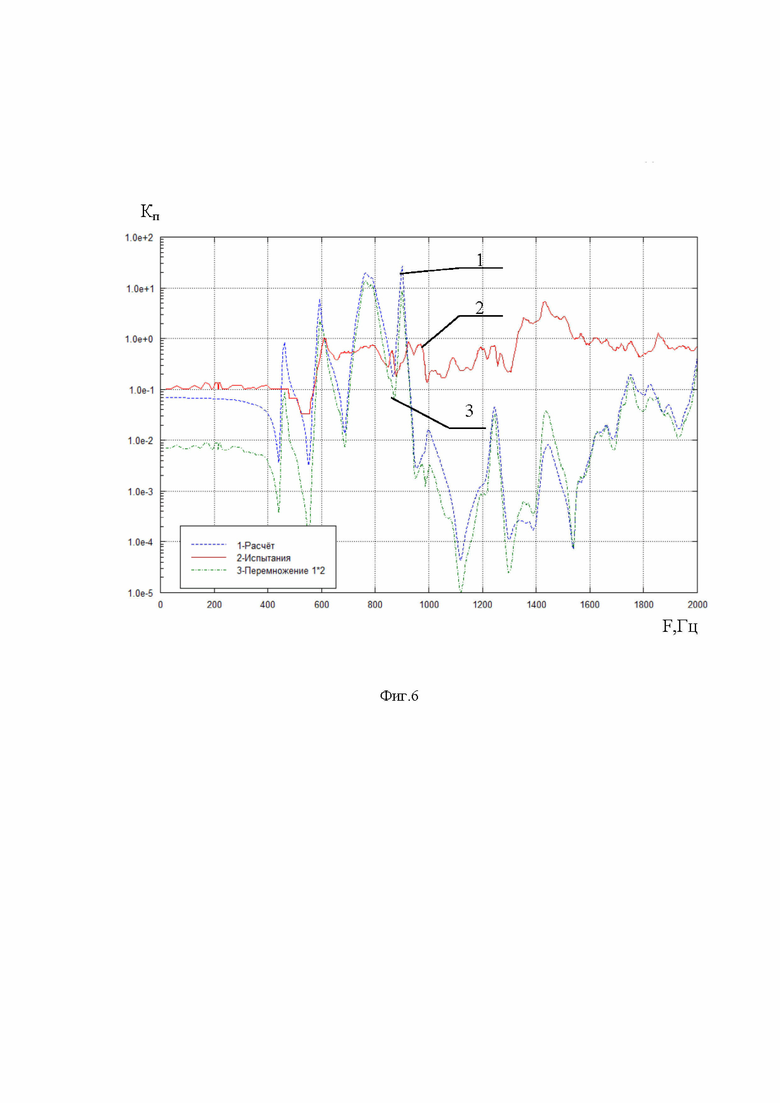
На фиг.1–4 показаны точки установки задающих (В01–В04) и контрольных (В1–В7) датчиков. На фиг.3 показаны контрольные датчики, установленные на рамках прибора в верхней части корпуса, а на фиг.4 – на боковой его поверхности. В качестве примера применения предложенной процедуры рассмотрим воздействие широкополосной случайной вибрации в направлении Х (перпендикулярно плоскости крепления платы) для одной точки с максимальным откликом. Это середина платы и на рамке этой платы установлен датчик В6. На фиг.5 стрелкой показана точка на плате с максимальным откликом. На фиг.1, 2 местоположение датчика В6 указано стрелкой. Как показано на фиг.3 датчик В6 находится между разъемами ХА203 и ХА208. На фиг.6 показаны 3 графика: коэффициенты усиления от точки с максимальными уровнями нагрузок в виде спектральной плотности мощности виброускорения до датчика В6, полученные расчетным путем (квадрат передаточной функции Hij,x,y,z(fk)) – 1, от точки В6 к точкам задания режима нагружения, полученная при частотных испытаниях прибора (квадрат передаточной функции Qj,x,y,z(fk)) – 2 и полная передаточная функция от точки с максимальным откликом (фиг.3) к точкам задания режима в плоскости крепления прибора (квадрат произведения передаточных функций Hij,x,y,z(fk) и. Qj,x,y,z(fk)) – 3.
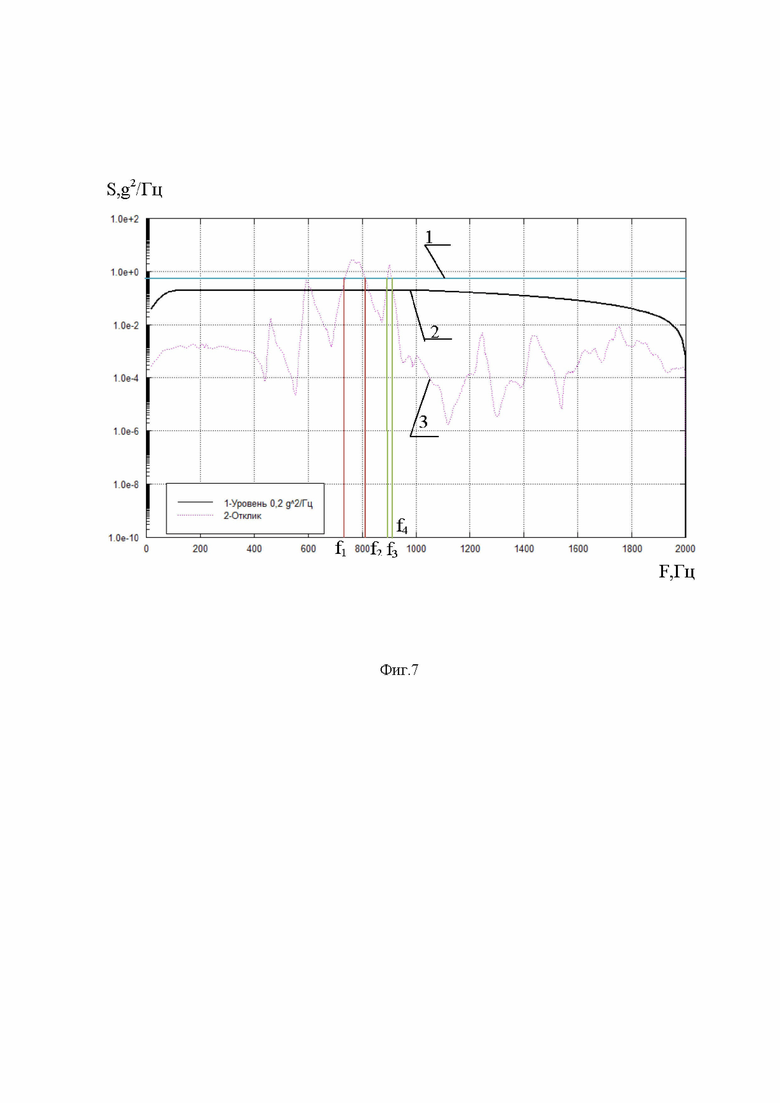
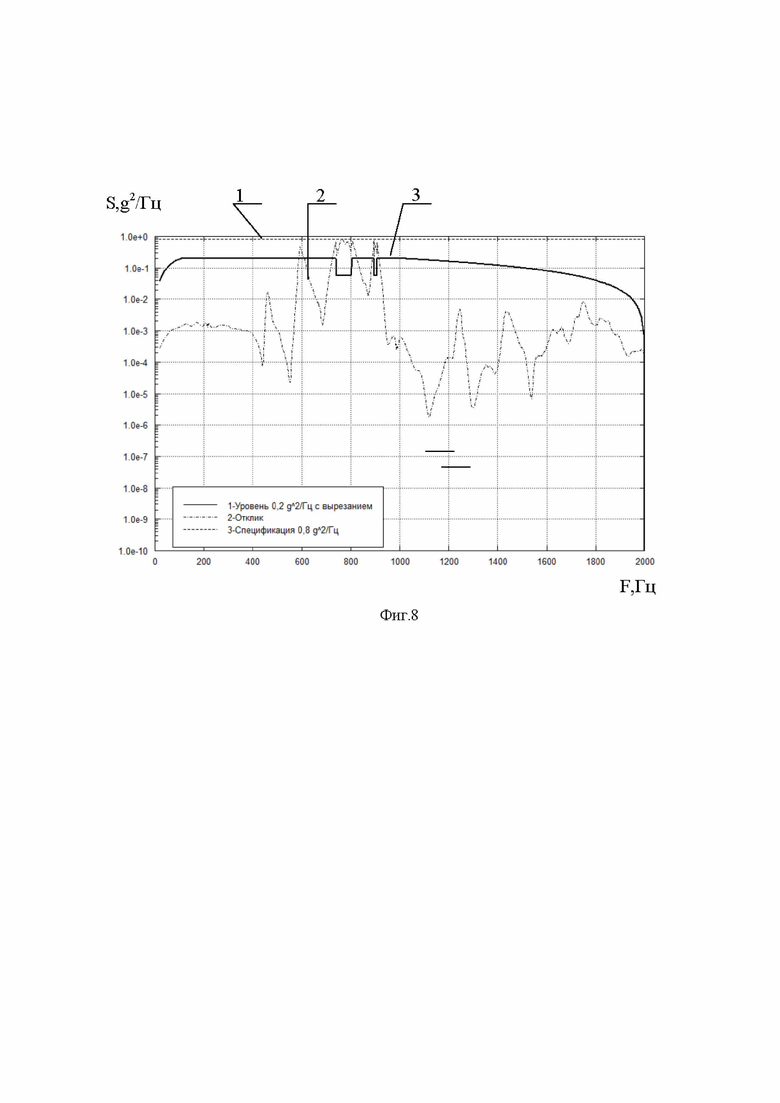
На фиг.7 показаны графики: допустимый уровень нагружения комплектующих в виде спектральной плотности мощности (0,8g2/Гц) – 1, спектральная плотность мощности виброускорений в точке с максимальным откликом – 2, задаваемая спектральная плотность мощности – 3 (функция Wi,x,y,z(fk)). Как видно из фиг.7 допустимые уровни могут быть превышены в диапазоне частот выше линии 1 (точки пересечения линий 1 и 3 составляют соответственно f1=743Гц, f2=801Гц, f3=895Гц и f4=906Гц), т.е. имеем 5 частотных диапазонов (к=5) до 743Гц, 743–801Гц, 801–895Гц, 895–906Гц, свыше 906Гц. Превышение допустимых уровней возможно в двух диапазонах: 743–801Гц, и 895–906Гц. В этих двух диапазонах и проводят корректировку входного режима нагружения. На фиг.8 показан откорректированный режим нагружения по направлению X. Допустимый уровень нагружения комплектующих в виде спектральной плотности мощности (0,8g2/Гц) – 1, спектральная плотность мощности виброускорений в точке с максимальным откликом – 2, откорректированный задаваемый режим нагружения спектральная плотность мощности виброускорений ( ) – 3. Как видно из фиг.8 отклик не превышает значений в 0,8g2/Гц.
) – 3. Как видно из фиг.8 отклик не превышает значений в 0,8g2/Гц.
Пример практического исполнения.
В качестве примера рассмотрим испытание на широкополосную случайную вибрацию одного из приборов, разработанного в АО «ИСС» и показанного на фиг.1. Рассмотрим формирование режима испытаний в направлении X. На прибор установлено 7 (В1–В7) контрольных и 4 (В01–В04) задающих датчиков. Испытания проводили заданием режима нагружения по «среднему» (по 4 датчикам В01–В04). В плоскости установки прибора задавалась случайная вибрация с уровнями до 0,2 g2/Гц. Режим нагружения показан на фиг.7, график 2 (функция Wi,x,y,z(fk)).
До начала испытаний были получены передаточные функции Hij,x,y,z(fk) по всем точкам контроля от всех точек с максимальным откликом (на этапе выполнения механического анализа прибора). Датчики В2 и В5 соответствовали точкам с максимальными откликами на корпусе прибора и для них передаточные функции Hij,x,y,z(fk) не строились.
На первом этапе проведения вибрационных испытаний при частотных испытаниях (испытания с минимальным уровнем задания режима нагружения) получены функции Qj,x,y,z(fk) от мест установки датчиков В1–В7 к задающим В01–В04. Для точки с максимальными откликами, показанной на фиг.5, получены следующие нагружения.
На фиг.7 показаны графики: допустимый уровень нагружения комплектующих в виде спектральной плотности мощности (0,8g2/Гц) – 1, спектральная плотность мощности виброускорений в точке с максимальным откликом – 2, задаваемая спектральная плотность мощности – 3. Как видно из фиг.7 допустимые уровни могут быть превышены в диапазоне частот выше линии 1 (точки пересечения линий 1 и 3 составляют соответственно f1=743Гц, f2=801Гц, f3=895Гц и f4=906Гц), т.е. имеем 5 частотных диапазонов (к=5) до 743Гц, 743–801Гц, 801–895Гц, 895–906Гц, свыше 906Гц. Превышение допустимых уровней возможно в двух диапазонах: 743–801Гц, и 895–906Гц. В этих двух диапазонах и проводят корректировку входного режима нагружения. На фиг.8 показан откорректированный режим нагружения по направлению X. Допустимый уровень нагружения комплектующих в виде спектральной плотности мощности (0,8g2/Гц) – 1, спектральная плотность мощности виброускорений в точке с максимальным откликом – 2, откорректированный задаваемый режим нагружения (спектральная плотность мощности виброускорений) – 3. Как видно из фиг.8 отклик не превышает значений в 0,8g2/Гц.
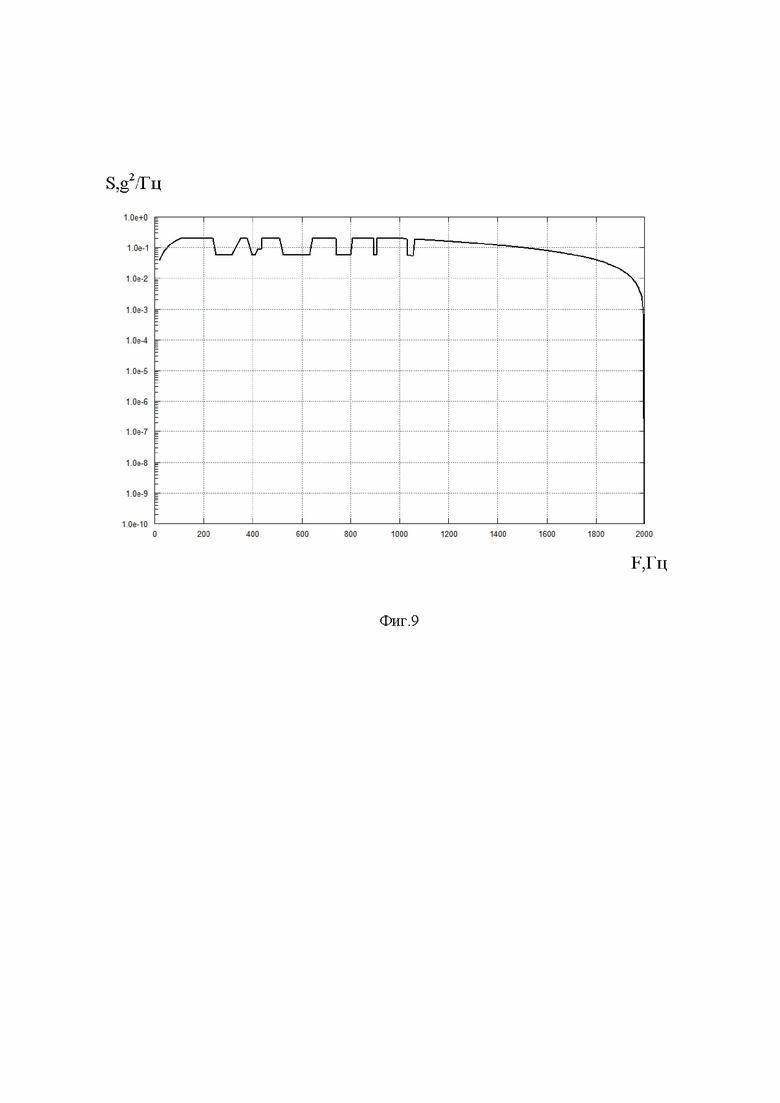
Аналогично получены корректировки функции Wi,x,y,z(fk) и по другим датчикам. Получены 13 частотных диапазонов: до 250Гц, 250–320 Гц, 320–380Гц, 380–410Гц,410–435 Гц, 435–510Гц, 510–640Гц, 640–743Гц, 743–801Гц, 801–895Гц, 895–906Гц, свыше 906Гц.
На фиг.9 показан откорректированный режим нагружения, функция .
.
Таким образом, при реализации заявляемого изобретения достигается следующий технический результат: появляется возможность более точного воспроизведения допустимой вибрационной нагрузки при вибрационных испытаниях, что позволит, исключить возможность перегружения электронных компонентов и конструкции бортовой аппаратуры.
Из известных авторам источников информации и патентных материалов не известна совокупность признаков, сходных с совокупностью признаков заявленных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ НА ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ ОБОРУДОВАНИЯ, СОСТАВНЫХ ЧАСТЕЙ И КОСМИЧЕСКИХ АППАРАТОВ | 2023 |
|
RU2811962C1 |
| Способ испытаний на высокоинтенсивные ударные воздействия приборов и оборудования | 2022 |
|
RU2794872C1 |
| СПОСОБ ИСПЫТАНИЙ БОРТОВОЙ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА НА ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2011 |
|
RU2476845C2 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКИХ АППАРАТОВ | 1998 |
|
RU2171974C2 |
| СПОСОБ ИСПЫТАНИЙ ПРИБОРОВ И АППАРАТУРЫ НА ТРАНСПОРТИРОВАНИЕ | 2008 |
|
RU2389995C1 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКОГО АППАРАТА НА МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ | 2005 |
|
RU2305265C2 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКОГО АППАРАТА НА ВИБРОАКУСТИЧЕСКИЕ ВОЗДЕЙСТВИЯ | 2007 |
|
RU2354948C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННЫХ ЧАСТОТ БАКА | 2008 |
|
RU2367920C1 |
| Способ испытаний на высокоинтенсивные ударные воздействия приборов и оборудования | 2020 |
|
RU2745342C1 |
| Способ выявления источников вибрации на конструкции самолёта с применением 3D визуализации результатов измерения | 2023 |
|
RU2815601C1 |
Изобретение относится к области испытаний аппаратуры на механические воздействия и может быть использовано при отработочных и приемных испытаниях аппаратуры для авиационной, ракетной и космической техники. Способ заключается в предварительном определении собственных частот аппаратуры и нагружении заранее заданным нормированным воздействием с последующей корректировкой задающего воздействия из условия непревышения допустимых режимов нагружения аппаратуры. При этом точки с максимальными откликами бортовой аппаратуры получают расчетным путем с использованием метода конечных элементов, после чего из результатов конечно элементного моделирования и физической возможности установки контрольных датчиков определяют места для установки контрольных датчиков при вибрационных испытаниях. Затем вычисляют передаточные функции от точек с максимальными откликами к точкам контроля в каждом из частотных поддиапазонов, выбирают количество и места установки контрольных датчиков в каждом из трех взаимно перпендикулярных направлений. После этого устанавливают контрольные датчики, затем проводят нагружение бортовой аппаратуры на минимальном уровне, обеспечивающем регистрацию откликов в местах установки контрольных датчиков, оценивают нагружение бортовой аппаратуры в точках с максимальными откликами, сравнивают с допустимыми и при ожидаемом превышении допустимых уровней последовательно проводят корректировку входного воздействия в каждом из трех взаимно перпендикулярных направлений с учетом полученных передаточных функций по формуле. После этого вибрационные испытания бортовой аппаратуры проводят последовательно в каждом из трех взаимно перпендикулярных направлениях на сформированных режимах. Технический результат заключается в возможности более точного воспроизведения допустимой вибрационной нагрузки при вибрационных испытаниях, исключении при испытаниях недопустимого нагружения (перегружения) электронных компонентов и конструкции бортовой аппаратуры. 9 ил. 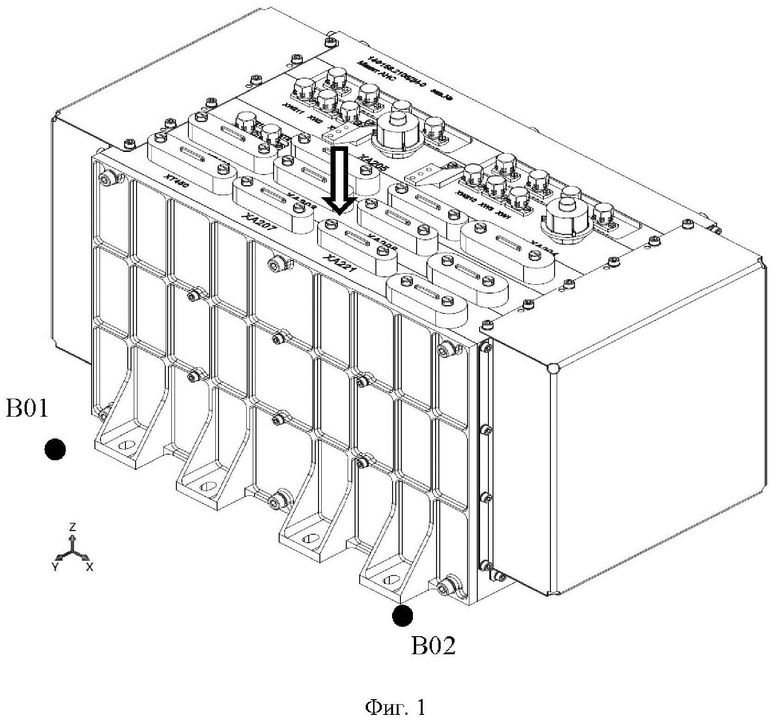
Способ испытаний бортовой аппаратуры космических аппаратов на вибрационные воздействия, заключающийся в предварительном определении собственных частот аппаратуры и нагружении заранее заданным нормированным воздействием с последующей корректировкой задающего воздействия из условия непревышения допустимых режимов нагружения аппаратуры, отличающийся тем, что точки с максимальными откликами бортовой аппаратуры получают расчетным путем с использованием метода конечных элементов, после чего из результатов конечно-элементного моделирования и физической возможности установки контрольных датчиков определяют места для установки контрольных датчиков при вибрационных испытаниях, вычисляют передаточные функции от точек с максимальными откликами к точкам контроля в каждом из частотных поддиапазонов, выбирают количество и места установки контрольных датчиков в каждом из трех взаимно перпендикулярных направлений, обеспечивающем регистрацию откликов в местах установки контрольных датчиков, оценивают нагружение бортовой аппаратуры в точках с максимальными откликами, сравнивают с допустимыми и при ожидаемом превышении допустимых уровней последовательно проводят корректировку входного воздействия в каждом из трех взаимно перпендикулярных направлений с учетом полученных передаточных функций по формуле:


для испытаний на гармоническую вибрацию и


при испытаниях на широкополосную случайную вибрацию,
где B(fx,y,z) - задаваемый режим нагружения бортовой аппаратуры в точках крепления аппаратуры к оснастке для каждого из трех взаимно перпендикулярных направлений x, y, z;
A(fx,y,z) - режим нагружения бортовой аппаратуры в виде гармонической вибрации, последовательно сформированный для каждого из трех взаимно перпендикулярных направлений x, y, z;
 - режим нагружения бортовой аппаратуры в виде широкополосной случайной вибрации, последовательно сформированный для каждого из трех взаимно перпендикулярных направлений x, y, z;
- режим нагружения бортовой аппаратуры в виде широкополосной случайной вибрации, последовательно сформированный для каждого из трех взаимно перпендикулярных направлений x, y, z;
Wi,x,y,z(fk) - режим нагружения бортовой аппаратуры в "i" контрольной точке в "k" частотном диапазоне для каждого из трех взаимно перпендикулярных направлений x, y, z;
Hij,x,y,z(fk) - передаточная функция от "i" контрольной точки к "j" точке с максимальными откликами бортовой аппаратуры в "k" частотном диапазоне для каждого из трех взаимно перпендикулярных направлений x, y, z;
Qi,x,y,z(fk) - передаточная функция от "j" контрольной точки к плоскости задания режима нагружения бортовой аппаратуры в “k” частотном диапазоне для каждого из трех взаимно перпендикулярных направлений x, y, z;
fk - значение частоты в "k" частотном диапазоне с максимальной величиной отклика;
L - количество контрольных точек;
N - количество частотных поддиапазонов;
M - количество точек с максимальными откликами,
после чего вибрационные испытания бортовой аппаратуры проводят последовательно в каждом из трех взаимно перпендикулярных направлений на сформированных режимах.
| СПОСОБ ИСПЫТАНИЙ БОРТОВОЙ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА НА ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2011 |
|
RU2476845C2 |
| СПОСОБ ИСПЫТАНИЙ КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ КОСМИЧЕСКОГО АППАРАТА, В ЧАСТНОСТИ СОТОВЫХ ПАНЕЛЕЙ, НА МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ | 2008 |
|
RU2366914C1 |
| СПОСОБ ИСПЫТАНИЙ ОБОРУДОВАНИЯ НА МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ | 2009 |
|
RU2399032C1 |
| US 9683912 B2, 20.06.2017. | |||

