Область техники, к которой относится изобретение
Настоящее изобретение относится к области амбулаторных инфузионных устройств и амбулаторных инфузионных систем для инфузии жидкого лекарственного средства в организм пациента в течение длительного периода времени. Типичной областью применения изобретения является лечение сахарного диабета методом непрерывной (длительной) подкожной инфузии инсулина (НПИИ/ДПИИ).
Уровень техники
Амбулаторные инфузионные устройства (аппараты, приборы) широко известны в технике как применяемые для введения жидких лекарственных средств, например при лечении сахарного диабета методом непрерывного подкожного введения инсулина (НПВИ), также известным как длительное подкожное введение, а также при лечении болей или рака. Амбулаторные инфузионные устройства поставляются рядом производителей, таких как компании Roche Diabetes Саге GmbH, Германия, или Medtronic MiniMed Inc, штат Калифорния, США.
В соответствии с классической и общепринятой конструктивной схемой такие амбулаторные инфузионные устройства или системы обычно выполняют по типу шприцевого насоса. Из уровня техники известен ряд недостатков таких устройств. В частности, таким устройствам свойственна ограниченная точность, поскольку применяют их для подачи лекарственных средств в очень малых количествах, обычно в нанолитровом диапазоне, путем вытеснения лекарственного средства из картриджа, общий полезный объем которого находится в миллилитровом диапазоне. Поэтому были предложены дополнительные идеи и архитектуры, предусматривающие применение отдельного (вынесенного) дозирующего устройства, которое расположено в тракте подачи лекарственного средства после резервуара лекарственного средства. Дозирующее устройство может содержать, например, мембранный или поршневой микронасос и выполнено с возможностью подключения к резервуару лекарственного средства, а также специально приспособлено для точного дозирования малых объемов. Хотя из уровня техники известно несколько конструктивных схем таких дозирующих устройств, они довольно сложны, а большинство из них являются дорогими и/или критичными в отношении крупномасштабного производства.
В публикации ЕР 1970677 А1 раскрыта система с миниатюризированным поршневым насосом, используемым в качестве дозирующего устройства. Это дозирующее устройство имеет дозирующий цилиндр, который периодически подключают к резервуару большего объема и заправляют из него с последующим подключением дозирующего цилиндра к линии инфузии и введением в организм вытесняемого из дозирующего цилиндра жидкого лекарственного средства, выполняемым в пошаговом режиме, т.е. дискретными приращениями хода поршня, в течение длительного периода времени. Для попеременного подключения дозирующего цилиндра к резервуару и линии инфузии предложена система гидрораспределения.
Раскрытие сущности изобретения
Амбулаторная инфузионная система, выполненная и действующая по принципам, раскрытым в публикации ЕР 1970677, имеет то преимущество, что дозирование осуществляется из сравнительно небольшого резервуара (дозирующего цилиндра), имеющего значительно меньшую площадь поперечного сечения по сравнению, например, со стандартным шприцевым насосом, упомянутым выше. Это позволяет при аналогичной точности перемещения поршня достичь в принципе значительно более высокой точности дозирования. Кроме того, в такой системе значительно снижается влияние других факторов, способных ухудшить точность дозирования, например температурного расширения. Однако недостатком этого подхода является необходимость в регулярной повторной заправке дозирующего цилиндра из резервуара лекарственного средства. В типичных случаях применения при лечении диабета одной заправки дозирующего цилиндра может хватать, в зависимости от конкретного пациента, питания и прочих факторов, на период от суток и более до лишь нескольких часов или даже на меньшее время.
Однако каждая повторная заправка дозирующего цилиндра предполагает изменение направления перемещения поршня на противоположное. При каждом изменении направления действия привода насоса, а следовательно при изменении направления перемещения поршня, имеет место мертвый ход, обусловленный люфтами или зазорами, обычно имеющимися в трансмиссии привода насоса (в частности, в понижающей зубчатой передаче и в винтовой передаче для преобразования вращательного движения в линейное). Следствием наличия мертвого хода является то, что при изменении направления действия привода на противоположное при работающем приводе соответствующее перемещение поршня не начнется до тех пор, пока не будет скомпенсирован (выбран) мертвый ход. Необходимость неоднократного изменения направления действия привода на противоположное, свойственная рассматриваемой общей архитектуре инфузионных систем, может привести к значительному снижению в принципе достижимой высокой базовой точности и может, в зависимости от общей конструкции, свести на нет ее преимущества.
В публикации ЕР 2361646 предлагается устранять мертвый ход в раскрытом в ЕР 1970677 дозирующем устройстве путем создания механического воздействия, постоянно нагружающего винтовую пару привода. Аналогично, в публикации WO 2013030000 раскрывается нагружающее устройство, обеспечивающее постоянное воздействие независимо от направления движения.
Общей задачей настоящего изобретения является улучшение ситуации в отношении точности амбулаторной инфузионной системы с дозирующим устройством, в частности уменьшение или устранение неточностей, обусловленных наличием мертвого хода. Желательно полностью или частично избавиться от недостатков известных систем.
В общем случае указанная задача решается в объектах изобретения, охарактеризованных в независимых пунктах его формулы. Частные примеры осуществления изобретения охарактеризованы в соответствующих зависимых пунктах формулы, а также рассматриваются ниже в описании, поясняемом чертежами.
В одном аспекте изобретения указанная выше общая задача решена в амбулаторном инфузионном устройстве. Амбулаторное инфузионное устройство содержит узел привода насоса. Узел привода насоса содержит исполнительный механизм привода насоса и ведущий элемент привода насоса, соединенный с исполнительным механизмом привода насоса. Ведущий элемент привода насоса является соединяемым, т.е. выполнен с возможностью соединения, с поршнем дозировочного насоса для передачи от исполнительного механизма привода насоса на поршень силы и/или крутящего момента привода насоса.
Амбулаторное инфузионное устройство также содержит узел привода гидрораспределителя. Узел привода гидрораспределителя содержит исполнительный механизм привода гидрораспределителя и ведущий элемент привода гидрораспределителя, соединенный с исполнительным механизмом привода гидрораспределителя. Ведущий элемент привода гидрораспределителя является соединяемым, т.е. выполнен с возможностью соединения, с гидрораспределителем для передачи от исполнительного механизма привода гидрораспределителя на гидрораспределитель силы и/или крутящего момента для переключения гидрораспределителя. Амбулаторное инфузионное устройство также содержит блок управления. Блок управления выполнен с возможностью управления неоднократным выполнением последовательности, включающей следующие этапы:
а) приведение в действие исполнительного механизма привода гидрораспределителя для переключения гидрораспределителя в состояние заправки;
б) приведение в действие исполнительного механизма привода насоса для перемещения поршня в направлении отвода;
в) приведение в действие исполнительного механизма привода насоса для перемещения поршня в направлении выдвижения, противоположном направлению отвода, на расстояние компенсации мертвого хода при нахождении 20 гидрораспределителя в состоянии заправки;
г) приведение в действие исполнительного механизма привода гидрораспределителя для переключения гидрораспределителя из состояния заправки в состояние подачи;
д) приведение в действие исполнительного механизма привода насоса для дальнейшего перемещения поршня в направлении выдвижения, совершаемого в пошаговом режиме в течение длительного периода времени.
Неоднократное выполнение последовательности этапов (а), (б), (в), (г), (д) отражает нормальную работу амбулаторной инфузионной системы. Предполагается, что амбулаторная инфузионная система инициализирована и прокачана: например, жидкостный тракт, ведущий от резервуара лекарственного средства к дозирующему устройству и далее к месту инфузии, заполнен жидким лекарственным средством. Газ/воздух в жидкостном тракте предпочтительно отсутствует или же присутствует лишь в пренебрежимо малом количестве.
Под дозировочным насосом понимается насосный узел, спроектированный и приспособленный для дозированной подачи точно определенных количеств жидкости в основном независимо от других условий в жидкостной системе, в частности давления. Дозирование достигается управляемым перемещением поршня внутри дозирующего цилиндра, в частности внутри дозирующей полости, выполненной в форме глухого (несквозного) отверстия, подобно полости шприца. Основные принципы устройства и действия дозирующего устройства, с применением которого в дальнейшем предполагается осуществление изобретения, раскрыты в публикации ЕР 1970677, к которой можно обращаться в части, касающейся основ конструкции и свойств дозирующего устройства.
Под амбулаторным инфузионным устройством, также называемым амбулаторным инфузионным аппаратом или прибором, понимается устройство, содержащее узел привода поршня, узел привода гидрораспределителя и блок управления. Под амбулаторной инфузионной системой понимается комбинация амбулаторного инфузионного устройства с жидкостными компонентами, в частности с дозирующим устройством, а возможно, и с другими компонентами, такими как резервуар и инфузионная линия, в рабочей конфигурации.
Движение поршня в направлении его отвода приводит к увеличению заполняемого жидкостью внутреннего объема дозирующего цилиндра. Под внутренним объемом дозирующего цилиндра понимается заполняемый жидкостью объем, т.е. объем, ограниченный поршнем, расположенной напротив него торцевой стенкой дозирующего цилиндра, и проходящей по окружности боковой стенкой дозирующего цилиндра, которая также определяет поверхность плотного и скользящего контакта цилиндра с поршнем. За счет движения поршня в направлении отвода дозирующий цилиндр соответственно заполняется жидким лекарственным средством за счет всасывания жидкого лекарственного средства из резервуара в дозирующий цилиндр подобно тому, как это происходит в шприце. Аналогичным образом, движение поршня в направлении выдвижения приводит к уменьшению заполненного жидкостью внутреннего объема дозирующего цилиндра, в результате чего происходит подача или, в более общем смысле, вытеснение жидкого лекарственного средства из дозирующего цилиндра. Направление выдвижения и направление отвода являются противоположными направлениями линейного движения.
Перемещение поршня в направлении отвода на этапе (б) завершается достижением поршнем своего отведенного положения. Перемещение поршня в направлении выдвижения на этапе (д) завершается достижением поршнем своего выдвинутого положения. При неоднократном выполнении последовательности описанных выше этапов (а)-(д), поршень, находясь в своем выдвинутом положении, начинает движение отвода на этапе (б). Аналогично, при включении узла привода насоса на выдвижение поршня на этапах (в), (д) поршень находится в своем отведенном положении.
При выполнении последовательности из описанных выше этапов дозирующий цилиндр заполняется жидким лекарственным средством на этапе (б), являющимся этапом заправки, и опорожняется на этапе (д), который является этапом подачи и на котором происходит управляемая дозированная подача жидкого лекарственного средства из дозирующего цилиндра. В конце этапа заправки поршень занимает свое отведенное положение, а в конце этапа подачи поршень занимает свое выдвинутое положение. В типичном варианте осуществления изобретения блок управления управляет приводом насоса таким образом, чтобы выполнить этап заправки за сравнительно короткое время, составляющее, например, от 15 до 45 секунд. Этап подачи, напротив, в соответствии с требованиями, предъявляемыми схемой лечения пользователя, осуществляется в течение длительного периода времени, составляющего, например, от нескольких часов до суток или даже больше. Кроме того, промежутки времени между шагами перемещения поршня и/или шаговые перемещения поршня, т.е. его перемещения за один шаг, могут быть одинаковыми или могут варьироваться. Другие аспекты подачи жидкого лекарственного средства поясняются ниже в контексте примеров осуществления изобретения.
Неоднократное выполнение последовательности этапов (а), (б), (г), (д) само по себе в принципе известно. В начале этапов (б) и (д), т.е. в начале движения поршня, соответственно, в направлениях отвода или выдвижения, имеет место мертвый ход. Мертвый ход в начале этапа (д) является более критичным, поскольку на этапе (д) жидкое лекарственное средство вводится в организм пациента.
В соответствии с настоящим изобретением мертвый ход не уменьшается и не устраняется механическими средствами, такими как нагружение или поджатие трансмиссии, а в целом принимается, но его неблагоприятное влияние на точность дозирования на этапе (д) устраняется путем включения в последовательность этапа (в) как этапа компенсации мертвого хода. На этапе (в) поршень перемещается на расстояние компенсации мертвого хода, пока дозирующий цилиндр еще сообщается с резервуаром, до переключения гидрораспределителя в состояние подачи на этапе (г). Жидкое лекарственное средство соответственно вытесняется из дозирующего цилиндра обратно в резервуар.
Под расстоянием компенсации мертвого хода понимается расстояние, на которое привод насоса при его приведении в действие должен переместить поршень. Это расстояние, на которое поршень, или его основная часть (основание), упоминаемая ниже, переместился бы, если бы мертвый ход был нулевым, т.е. если бы мертвый ход отсутствовал. Фактическое перемещение поршня меньше расстояния компенсации мертвого хода. Расстояние компенсации мертвого хода целесообразно подбирать так, чтобы перемещение поршня соответствовало максимальному возможному мертвому ходу, предпочтительно с некоторым запасом надежности, учитывающим упругость поршня. В типичном исполнении поршень имеет основную часть, обычно изготавливаемую из твердого материала, как правило, из пластмассы, с мягким уплотнением, проходящим по боковой поверхности. Помимо мертвого хода, обусловленного допусками в трансмиссии, трение между уплотнением поршня и внутренней стенкой дозирующего цилиндра может вызывать, в сочетании с упругостью уплотнения поршня, различие между требуемым (расчетным) вытеснением жидкости, соответствующим перемещению основной части поршня, и фактическим вытеснением жидкости из дозирующего цилиндра. Запас надежности целесообразно выбирать так, чтобы упругая деформация уплотнения, происходящая после изменения направления движения поршня на противоположное, имела место во время компенсации мертвого хода. В конце этапа (в) компенсации мертвого хода мертвый ход и упругость уплотнения поршня компенсируются соответственно. На этапе (д) подачи поршень будет соответственно совершать дальнейшее перемещение в соответствии с приведением в действие привода насоса.
Для выполнения последовательности этапов (а)-(д) при осуществлении настоящего изобретения предполагается применение дозирующего устройства, позволяющего осуществлять переключение гидрораспределителя независимо от движения поршня. Такое дозирующее устройство раскрыто, например, в публикации ЕР 1970677 и, в особенности, в примерах осуществления изобретения, заявленного в европейской патентной заявке 16173361.3 и опубликованного в публикации WO 2015/082305.
Зацепление ведущего и ведомого элементов привода насоса является двусторонним в том смысле, что передача силы и/или крутящего момента возможны в противоположных направлениях. Узел привода насоса является реверсируемым.
Гидрораспределитель дозирующего устройства может быть выполнен с возможностью циклической работы таким образом, чтобы изменять свое состояние между состоянием заправки и состоянием подачи при каждом приведении в действие привода гидрораспределителя, притом что сила и/или крутящий момент привода гидрораспределителя всегда прикладывается в одном направлении. В таких вариантах осуществления изобретения узел привода гидрораспределителя может быть выполнен с возможностью действия в одном направлении, а соединение между ведущим и ведомым элементами привода гидрораспределителя может быть выполнено для передачи силы/крутящего момента в одном направлении. Вместе с тем, в альтернативном варианте гидрораспределитель может быть выполнен таким образом, чтобы для его переключения в состояние заправки и состояние подачи направление действия привода гидрораспределителя изменялось соответственно на противоположное. В таких вариантах осуществления изобретения узел привода гидрораспределителя является реверсируемым, а зацепление ведущего и ведомого элементов привода гидрораспределителя является двусторонним в том смысле, что передача силы и/или крутящего момента возможны в противоположных направлениях.
В частности, при описании компонентов амбулаторного инфузионного устройства, дозирующего устройства или амбулаторной инфузионной системы направление выдвижения поршня также может называться проксимальным направлением, а направление отвода поршня может называться дистальным направлением.
В одном варианте осуществления изобретения расстояние компенсации мертвого хода составляет от 0,3 до 1 мм. Как пояснялось выше, фактическое расстояние, на которое перемещается поршень, меньше расстояния компенсации мертвого хода и находится, как правило, в диапазоне десятых долей миллиметра, например, составляет от 0,1 до 0,5 мм.
В одном варианте осуществления изобретения блок управления выполнен с возможностью запуска последовательности этапов (а)-(д) при нахождении поршня в крайнем выдвинутом положении. Крайним выдвинутым положением является положение поршня, за которым поршень далее не перемещается в направлении выдвижения и которое в эксплуатации соответствует минимальному объему заполнения дозирующего цилиндра. Для таких вариантов осуществления изобретения крайним выдвинутым положением поршня является положение поршня после его полного выдвижения, как пояснялось выше. Крайнее выдвинутое положение поршня в принципе может определяться механическим упором узла привода насоса и/или насосного узла в направлении выдвижения, например, когда поршень упирается в дно (торцевую стенку) дозирующей полости. Вместе с тем, в особенно выгодном варианте осуществления изобретения крайнее выдвинутое положение поршня слегка, например на несколько сотых долей миллиметра, отстоит от механического упора выдвижения. Во время инициализации дозирующего устройства поршень может перемещаться в направлении выдвижения, пока не встанет на механический упор, что регистрируется блоком управления и сохраняется им в памяти. Во время последующей работы, в частности во время выполнения последовательности этапов (а)-(д), движение поршня в направлении выдвижения прекращается в крайнем выдвинутом положении до достижения поршнем механического упора. Занятие поршнем крайнего выдвинутого положения предпочтительно регистрируется блоком управления.
В одном варианте осуществления изобретения блок управления выполнен с возможностью прекращения приведения в действие исполнительного механизма привода насоса на этапе (б), т.е. отключения исполнительного механизма привода насоса, при занятии поршнем крайнего отведенного положения. Крайним отведенным положением является положение поршня, за которым поршень далее не перемещается в направлении отвода и которое в эксплуатации соответствует максимальному объему заполнения дозирующего цилиндра. Для таких вариантов осуществления изобретения крайним отведенным положением поршня является положение поршня после его полного отвода, как пояснялось выше. Последним пределом для крайнего отведенного положения поршня является положение поршня, в котором дальнейшее перемещение поршня в направлении отвода привело бы к выходу поршня из дозирующей полости, при котором контакт между поршнем и дозирующим цилиндром стал бы неплотным, или поршень встал бы на механический упор. Вместе с тем, в особенно выгодном варианте осуществления изобретения крайнее отведенное положение поршня слегка, например на несколько сотых долей миллиметра, отстоит от такого предела выдвижения. Занятие поршнем крайнего отведенного положения предпочтительно регистрируется блоком управления.
Вариант осуществления изобретения, в котором крайнее выдвинутое положение поршня и крайнее отведенное положение поршня не определяются механическими упорами, выгоден тем, что после инициализации, во время нормальной работы, поршень никогда не ударяется в механический упор, что неизбежно снизило бы точность дозирования.
В варианте осуществления изобретения, где движение поршня завершается в крайнем отведенном положении последнего, используется весь располагаемый ход поршня. На этапе (б) заправки дозирующий цилиндр заправляется до своего максимального объема заполнения, а на этапе (д) подачи дозирующий цилиндр опорожняется полностью или по существу полностью.
В одном варианте осуществления изобретения узел привода насоса выполнен в виде привода вращения или привода линейного перемещения. Если узел привода насоса представляет собой привод вращения, движение, совершаемое во время работы ведущим элементом привода насоса, является чисто вращательным. Если узел привода насоса представляет собой привод линейного перемещения, движение, совершаемое во время работы ведущим элементом привода насоса, является чистым линейным движением или комбинированным поступательно-вращательным движением.
Обычно вращательное движение исполнительного механизма привода насоса (как правило, двигателя вращательного движения) преобразуется в поступательное движение за счет взаимодействия ходового винта и соответствующей гайки, или - в более общем смысле - взаимодействия элемента с наружной резьбой и соответствующего элемента с внутренней резьбой.
Далее сначала рассматривается случай, в котором узел привода насоса выполнен в виде привода вращения. Любой из элементов винтовой пары, а именно элемент с внутренней резьбой или соответствующий элемент с наружной резьбой, может получать крутящий момент привода от исполнительного механизма привода насоса и совершать вращательное движение, а соответственно другой элемент винтовой пары, образованной ходовым винтом и гайкой, может совершать чистое линейное движение или комбинированное поступательно-вращательное движение.
Кроме того, преобразование чистого вращательного движения в поступательное может осуществляться узлом привода, дозирующим устройством или при взаимодействии ведущего элемента привода насоса как части узла привода и ведомого элемента привода насоса как части дозирующего устройства.
Ведущий элемент привода насоса может быть выполнен в виде приводной гайки, приводимой во вращение исполнительным механизмом привода насоса. В таком варианте осуществления изобретения ведомый элемент привода насоса дозирующего устройства может быть образован ходовым винтом, зафиксированным от вращения при помощи известных средств стопорения от вращения. Конец ходового винта соединен с поршнем или выполнен за одно целое с ним, вследствие чего на поршень передается поступательное движение.
Кроме того, при выполнении узла привода насоса в виде привода вращения ведущим элементом привода насоса может быть ходовой винт, установленный с возможностью вращения и приводимый во вращение исполнительным механизмом привода насоса, а ведомым элементом привода насоса может быть соответствующий элемент с внутренней резьбой, т.е. гайка, соединенный(-ая) с поршнем или выполненный(-ая) за одно целое с ним. Элемент с внутренней резьбой может быть зафиксирован от вращения при помощи средств стопорения от вращения, которые могут быть частью амбулаторного инфузионного устройства или дозирующего устройства.
Кроме того, при выполнении узла привода насоса в виде привода вращения ведущим элементом привода насоса может быть безрезьбовой вращающийся элемент, который в сопряженной конфигурации передает на ведомый элемент привода насоса крутящий момент привода, но не линейную силу. Ведущий элемент привода насоса может быть выполнен, в частности, в виде вращающегося удлиненного элемента с некруглым, например, квадратным или шестиугольным, поперечным сечением, например в виде стержня с некруглым (например, шестиугольным, квадратным или прямоугольным) поперечным сечением, или может иметь отверстие такого поперечного сечения, выполненное соосно с удлиненным элементом по оси вращения. В этом случае ведомый элемент привода гидрораспределителя имеет соответствующее некруглое поперечное сечение для сопряжения с ведущим элементом привода гидрораспределителя с возможностью их совместного вращательного движения и взаимного осевого скользящего перемещения. Например, ведомый элемент привода гидрораспределителя может иметь форму удлиненного стержня некруглого поперечного сечения и может быть расположен соосно с ходовым винтом таким образом, что он проходит от ходового винта в дистальном направлении, а при необходимости может быть выполнен за одно целое с ходовым винтом. В еще одном варианте ходовой винт имеет, по меньшей мере на дистальном участке, некруглое поперечное сечение для сопряжения с ведущим элементом привода гидрораспределителя. Для преобразования вращательного движения в линейное в этом варианте осуществления изобретения предусмотрено нахождение элемента с внутренней резьбой, т.е. гайки, в зацеплении (взаимодействии) с ходовым винтом. Элемент с внутренней резьбой может быть частью амбулаторного инфузионного устройства или дозирующего устройства и может быть образован, например, дистальным участком дозирующего цилиндра. В рассматриваемом варианте осуществления изобретения ходовой винт, т.е. элемент с наружной резьбой, совершает винтовое движение, являющееся комбинированным поступательно-вращательным движением.
Вариант осуществления изобретения, в котором гайка, т.е. элемент с внутренней резьбой, предусмотрена как часть дозирующего устройства, является особенно выгодным, поскольку силовая цепь замыкается накоротко внутри дозирующего устройства независимого от других элементов амбулаторного инфузионного устройства, в частности корпуса и подвижных деталей трансмиссии привода насоса. Кроме того, если ходовой винт жестко прикреплен к поршню или выполнен за одно целое с ним, движение, совершаемое поршнем при приведении в действие привода насоса, будет винтообразным, т.е. комбинированным вращательно-поступательным, а не чистым поступательным движением. Чисто поступательное движение позволяет уменьшить общие потери на трение между поршнем и внутренней стенкой дозирующего цилиндра, что препятствует возникновению прерывистого скольжение поршня и соответственно повышает точность дозирования.
Далее рассматривается альтернативный случай, в котором узел привода насоса выполнен в виде привода линейного перемещения. В таком варианте осуществления изобретения ведущий и ведомый элементы привода насоса обычно совершают одинаковые линейные перемещения в параллельных направлениях и на одинаковое расстояние. Ведущий элемент привода насоса и поршень могут быть выполнены с возможностью непосредственного сцепления, причем ведомый элемент привода насоса предпочтительно выполнен за одно целое с поршнем или жестко присоединен к нему. Сцепление между ведущим и ведомым элементами привода насоса, как правило, представляет собой разъемное соединение, работающее на передачу толкающих и тянущих усилий.
В одном варианте осуществления изобретения ведущий элемент привода гидрораспределителя содержит палец для зацепления с ведомым элементом привода гидрораспределителя. Примеры выполнения ведущего элемент привода гидрораспределителя раскрыты, например, в европейской патентной заявке 16173361.3, на содержание которой в этой связи приводится ссылка. Применение пальца в качестве ведущего элемента привода гидрораспределителя выгодно тем, что палец сравнительно прост в плане конструкции и обеспечивает простое и надежное сцепление, которое обычно является разъемным.
В одном варианте осуществления изобретения ведущий элемент привода гидрораспределителя представляет собой входное звено шагового механизма переключения, в частности мальтийского механизма. Шаговый механизм переключения характеризуется тем, что он преобразует непрерывное движение на входе в прерывистое движение на выходе таким образом, что выходное звено шагового механизма переключения переходит из исходного в конечное состояние по существу скачкообразно. Кривая зависимости положения выходного, или ведомого, звена от положения входного, или ведущего, звена является ступенчатой. В настоящем контексте входное звено шагового механизма переключения является ведущим элементом привода гидрораспределителя, а выходное звено шагового механизма переключения -ведомым элементом привода гидрораспределителя, причем исходным состоянием (состоянием до приведения в действие шагового механизма переключения) является одно, а конечным состоянием другое из состояния заправки и состояния подачи. В настоящем контексте шаговый механизм переключения имеет то особое преимущество, что он позволяет осуществлять точно определенное переключение гидрораспределителя без необходимости точного и сложного управления приводом гидрораспределителя. Кроме того, шаговый механизм переключения может быть выполнен таким образом, чтобы обеспечивать простое и обычно разъемное соединение между ведущим и ведомым элементами привода гидрораспределителя без необходимости в предварительном выполнении их точного взаимного совмещения. Частные варианты выполнения узлов привода гидрораспределителя, в частности ведущих элементов привода гидрораспределителя, и соответствующих дозирующих устройств, в частности ведомых элементов привода гидрораспределителя, раскрыты в публикации WO 2015/082305, на содержание которой в этой связи приводится ссылка.
В одном варианте осуществления изобретения исполнительный механизм привода гидрораспределителя содержит шаговый электродвигатель или привод на основе сплава с эффектом памяти формы. Как шаговые электродвигатели, так и приводы на основе сплава с эффектом памяти формы особенно подходят для применения в качестве исполнительного механизма привода гидрораспределителя или в составе такого исполнительного механизма, поскольку они имеют сравнительно невысокую стоимость и обеспечивают простоту и надежность конструкции привода гидрораспределителя. Частные варианты конструкции узла привода гидрораспределителя с двумя проволоками из сплава с эффектом памяти формы раскрыты в вышеупомянутой европейской патентной заявке 16173361.3. Частные варианты конструкции узла привода гидрораспределителя с шаговым электродвигателем и шаговым механизмом переключения раскрыты в вышеупомянутой в публикации WO 2015/082305. Вместе с тем, в альтернативных вариантах осуществления изобретения могут использоваться и другие типы исполнительных механизмов (приводов), такие как электромагнитный исполнительный механизм или стандартный электродвигатель постоянного тока.
В одном варианте осуществления изобретения блок управления выполнен с возможностью определения того, что поршень находится в крайнем отведенном положении или в крайнем выдвинутом положении. Для этого блок управления может быть выполнен с возможностью непрямого определения положения поршня, например посредством вращательного энкодера привода насоса. В качестве альтернативы или дополнения, с этой целью могут быть предусмотрены, например, в соответствии с публикацией WO 2012/140052, концевые выключатели, например оптические или электромеханические концевые выключатели, или датчик положения поршня.
Следует отметить, что для приводов насоса на основе винтовой передачи существует фиксированная зависимость, определяемая шагом резьбы, между вращательным движением исполнительного механизма и поступательным движением ведущего элемента привода насоса, при условии компенсации мертвого хода. Таким образом, достаточно установить нахождение поршня по меньшей мере в одном из крайнего отведенного и крайнего выдвинутого положений или в любом другом точно заданном положении, заданном как положение отсчета, и блок управления может быть способен определять, исходя из этого положения отсчета, текущее положение поршня, подсчитывая шаги приведения в действие исполнительного механизма привода насоса, т.е. количество его включений в пошаговом режиме. Шаговые включения или срабатывания исполнительного механизма как наименьшие осуществимые движения или перемещения можно определять, например, посредством вращательного энкодера на выходном валу двигателя.
В одном варианте осуществления изобретения амбулаторное инфузионное устройство является вводимым, выполнено с возможностью входа, в разъемное соединение с дозирующим устройством посредством соединяющего движения.
Соединяющее движение может, например, представлять собой или включать в себя относительное линейное поступательное перемещение. Процесс соединения обычно включает в себя введение дозирующего устройства в соответствующее отделение амбулаторного инфузионного устройства или крепление дозирующего устройства к амбулаторному инфузионному устройству. При соединении амбулаторного инфузионного устройства с дозирующим устройством сопряжение (сцепление) ведущего элемента привода насоса с ведомым элементом привода насоса и/или сопряжение (сцепление) ведущего элемента привода гидрораспределителя с ведомым элементом привода гидрораспределителя может устанавливаться автоматически. Вместе с тем, в качестве альтернативы, такое соединение может устанавливаться позже, путем соответствующих включений привода.
В одном варианте осуществления изобретения узел привода гидрораспределителя выполнен таким образом, что во время соединяющего движения он остается вне зацепления с гидрораспределителем. В частности, ведущий элемент узла привода гидрораспределителя не входит в сопряжение с ведомым элементом узла привода гидрораспределителя. Напротив, зацепление устанавливается лишь впоследствии путем соответствующего приведения в действие привода гидрораспределителя. Подобный вариант осуществления изобретения имеет то особое преимущество, что во время соединения не требуется точное совмещение или взаимная ориентация сопрягаемых устройств. Такие варианты раскрыты, например, в вышеупомянутой в публикации WO 2012/140052. В качестве альтернативы, дозирующее устройство и/или амбулаторное инфузионное устройство может содержать соответствующие установочные элементы, которые во время соединения совмещают ведущий элемент привода гидрораспределителя и ведомый элемент привода гидрораспределителя. Соответствующие варианты раскрыты, например, в вышеупомянутой европейской патентной заявке 16173361.3.
Согласно еще одному аспекту указанная выше общая задача решена в амбулаторной инфузионной системе. Амбулаторная инфузионная система включает в себя амбулаторное инфузионное устройство. Амбулаторная инфузионная система также включает в себя дозирующее устройство. Дозирующее устройство содержит дозировочный насос. Насос содержит дозирующий цилиндр, поршень и гидрораспределитель. Поршень плотно и подвижно (по плотной скользящей посадке) установлен внутри дозирующего цилиндра с возможностью перемещения между крайним отведенным положением и крайним выдвинутым положением. Дозирующее устройство также содержит гидрораспределитель. Гидрораспределитель имеет заправочное отверстие, сообщаемое с резервуаром жидкого лекарственного средства. Гидрораспределитель также имеет выпускное отверстие, сообщаемое с интерфейсом места инфузии. Гидрораспределитель также имеет запорный элемент, подвижный между положением заправки, в котором он сообщает заправочное отверстие с дозирующим цилиндром, и альтернативном положению заправки положением подачи, в котором он сообщает дозирующий цилиндр с выпускным отверстием. Дозирующее устройство также имеет ведомый элемент привода насоса и ведомый элемент привода гидрораспределителя. Ведомый элемент привода насоса соединен с поршнем или выполнен за одно целое с ним, а ведомый элемент привода гидрораспределителя соединен с запорным элементом или выполнен за одно целое с ним. Узел привода гидрораспределителя взаимодействует, т.е. находится в зацеплении/сопряжении или вводится в зацепление/сопряжение, с ведомым элементом привода гидрораспределителя, а ведущий элемент привода насоса взаимодействует, т.е. находится в зацеплении/сопряжении или вводится в зацепление/сопряжение, с поршнем. Во время работы ведомый элемент привода насоса воспринимает силу и/или крутящий момент привода насоса от ведущего элемента привода насоса, а ведомый элемент привода гидрораспределителя воспринимает силу и/или крутящий момент для переключения гидрораспределителя от ведущего элемента привода гидрораспределителя. Ведомый элемент привода гидрораспределителя является частью гидрораспределителя, а ведомый элемент привода насоса является частью насоса. Насос, в частности дозирующий цилиндр, и гидрораспределитель, обычно выполняются в виде компактного жидкостного устройства.
Другие аспекты дозирующего устройства рассмотрены выше и рассматриваются ниже в контексте взаимодействия между дозирующим устройством и амбулаторным инфузионным устройством. Амбулаторная инфузионная система может включать в себя резервуар лекарственного средства и/или интерфейс места инфузии, такой как инфузионная канюля, а также инфузионную линию или трубку, сообщающую выпускное отверстие с интерфейсом места инфузии.
Согласно еще одному аспекту указанная выше общая задача решена в способе компенсации мертвого хода для дозирующего устройства, предназначенного для инфузии жидкого лекарственного средства. Способ включает неоднократное выполнение последовательности следующих этапов:
а) переключение гидрораспределителя в состояние заправки;
б) перемещение поршня в направлении отвода в отведенное положение;
в) перемещение поршня в направлении выдвижения, противоположном направлению отвода, на расстояние компенсации мертвого хода при нахождении гидрораспределителя в состоянии заправки;
г) переключение гидрораспределителя из состояния заправки в состояние подачи;
д) дальнейшее перемещение поршня в направлении выдвижения, совершаемое в пошаговом режиме в течение длительного периода времени, в выдвинутое положение.
Способ может осуществляться при помощи дозирующего устройства. Дозирующее устройство содержит дозировочный насос. Насос содержит дозирующий цилиндр, поршень и гидрораспределитель. Поршень установлен внутри дозирующего цилиндра плотно и подвижно (по скользящей посадке) с возможностью перемещения между крайним отведенным положением и крайним выдвинутым положением. Дозирующее устройство также содержит гидрораспределитель. Гидрораспределитель имеет заправочное отверстие, сообщаемое с резервуаром жидкого лекарственного средства. Гидрораспределитель также имеет выпускное отверстие, сообщаемое с интерфейсом места инфузии. Гидрораспределитель также имеет запорный элемент, подвижный между положением заправки, в котором он сообщает заправочное отверстие с дозирующим цилиндром, и альтернативном положению заправки положением подачи, в котором он сообщает дозирующий цилиндр с выпускным отверстием.
Способ также может включать, перед вышеупомянутым неоднократным выполнением последовательности этапов (а)-(д), установление сообщения заправочного отверстия с резервуаром жидкого лекарственного средства и, предпочтительно, поддержание этого сообщения во время неоднократного выполнения последовательности этапов (а)-(д).
Способ может осуществляться, в частности, при помощи предлагаемых в изобретении дозирующего устройства, амбулаторного инфузионного устройства и/или амбулаторной инфузионной системы и соответствующих любому варианту выполнения такого дозирующего устройства, амбулаторного инфузионного устройства и/или амбулаторной инфузионной системы. Соответствующие варианты выполнения дозирующих устройств, амбулаторных инфузионных устройств и амбулаторных инфузионных систем одновременно раскрывают соответствующие варианты осуществления способа.
Краткое описание чертежей
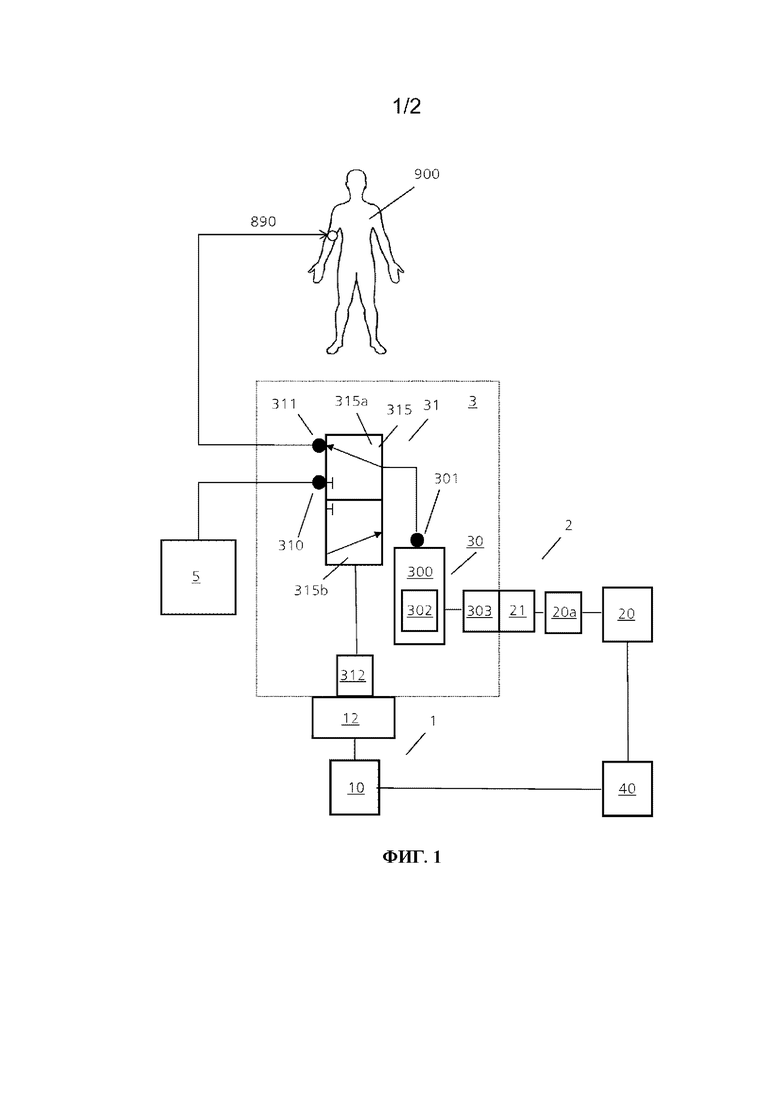
На фиг. 1 схематически показана предлагаемая в изобретении амбулаторная инфузионная система.
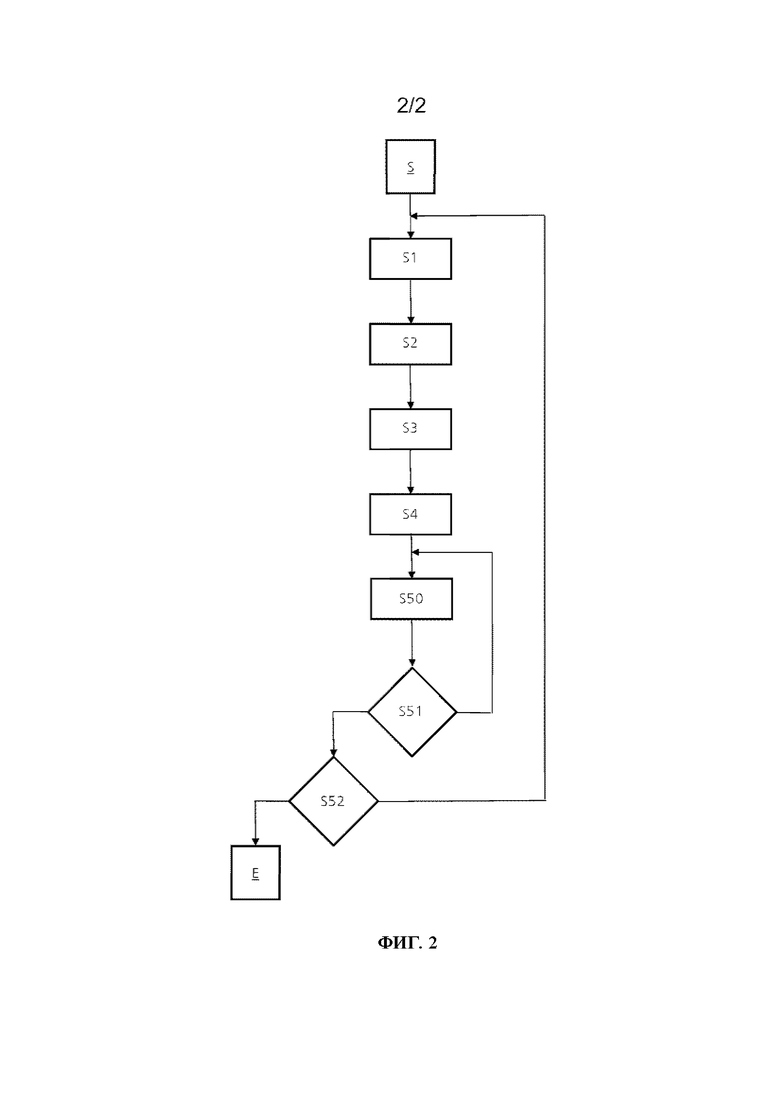
На фиг. 2 приведена блок-схема осуществления предлагаемой в изобретении последовательности.
Примеры осуществления изобретения
Осуществление изобретения сначала поясняется со ссылкой на фиг. 1. На фиг. 1 показаны функциональные узлы предлагаемых в изобретении амбулаторного инфузионного устройства и амбулаторной инфузионной системы.
Амбулаторная инфузионная система включает в себя дозирующее устройство 3 и амбулаторное инфузионное устройство с узлом 2 привода насоса и узлом 1 привода гидрораспределителя. Амбулаторное инфузионное устройство также содержит электронный блок управления 40. Амбулаторная инфузионная система также включает в себя, в рабочем состоянии, резервуар 5 жидкого лекарственного средства. Следует заметить, что показаны только те конструктивные и функциональные узлы, которые являются особо значимыми с точки зрения осуществления настоящего изобретения. В состав системы обычно входят также другие узлы и устройства, такие как источник питания, пользовательский интерфейс и т.д.
Дозирующее устройство 3 содержит дозировочный насос 30 (также называемый просто насосом) и гидрораспределитель 31. Дозировочный насос 30 содержит дозирующий цилиндр 300 и поршень 302, плотно и подвижно (по скользящей посадке) установленный внутри дозирующего цилиндра 300, подобно поршню шприца. В проксимальной (ближней к гидрораспределителю) торцевой стенке дозирующего цилиндра 300 выполнен канал, действующий в качестве насосного отверстия 301 и сообщающий внутренний объем дозирующего цилиндра 300 с гидрораспределителем 31.
Гидрораспределитель 31 содержит запорный элемент 315, подвижный между положением 315b заправки и положением 315а подачи. Если запорный элемент находится в положении заправки, гидрораспределитель считается находящимся в состоянии заправки. Аналогичным образом, если запорный элемент 315 находится в положении подачи, гидрораспределитель 31 считается находящимся в состоянии подачи. В процессе эксплуатации гидрораспределитель 31 неоднократно переключается между состоянием заправки и состоянием подачи, как подробнее поясняется ниже. Резервуар 5 сообщается с гидрораспределителем 31 через заправочное отверстие 310. Пациент 900 подключен к гидрораспределителю 31 через выпускное отверстие 311 и интерфейс 890 места инфузии. Следует заметить, что в качестве примера интерфейс 890 места инфузии представлен как неотъемлемая часть инфузионной линии, например катетер. В качестве альтернативы, инфузионный насос может быть выполнен как носимый на теле насос, который непосредственно крепится на теле пациента, например, при помощи пластыря. В этом случае интерфейсом места инфузии может быть непосредственно канюля.
Запорный элемент 315 гидрораспределителя 31 установлен в опоре гидрораспределителя плотно и с возможностью поворота.
Запорный элемент 315 имеет проточный канал, который в зависимости от углового положения запорного элемента 315 реализует либо состояние 315b заправки, либо состояние 315а подачи. Гидрораспределитель 31 обычно расположен по линии с насосом 30 проксимально относительно него. В типичной компоновке, также предполагающейся в дальнейшем, ось запорного элемента параллельна продольной оси дозирующего цилиндра 300, вдоль которой перемещается поршень 302, в частности совпадает с ней. Эта компоновка, однако, не является существенной.
Дозирующее устройство 3 также содержит ведомый элемент 312 привода гидрораспределителя, предназначенный для переключения гидрораспределителя 31 между положением 315b заправки и положением 315а подачи и являющийся частью гидрораспределителя 31. Аналогично, дозирующее устройство 3 содержит ведомый элемент 303 привода насоса, предназначенный для перемещения поршня 302 внутри дозирующего цилиндра 300, как пояснялось выше, и являющийся частью дозировочного насоса 30. Ведомый элемент 303 привода насоса может быть выполнен полностью или частично за одно целое с поршнем 302.
Дозировочный насос 30 и гидрораспределитель 31 работают независимо друг от друга. Это значит, что поршень 302 можно перемещать внутри дозирующего цилиндра 300, не оказывая влияния на состояние гидрораспределителя 31. Аналогичным образом, состояние гидрораспределителя 31 можно изменять путем соответственного переключения гидрораспределителя, не оказывая влияния на положение поршня 302 внутри дозирующего цилиндра 300. Кроме того, переключение гидрораспределителя между состоянием заправки и состоянием подачи не подразумевает перемещения жидкости между заправочным отверстием 310 и выпускным отверстием 311 как следствие движения запорного элемента 315. Следовательно, переключение гидрораспределителя не сопровождается дозированием жидкости в организм пациента. Этот аспект особенно важен, поскольку управляемое и дозированное введение лекарственного средства выполняется исключительно путем управляемого перемещения поршня 302. В случае высококонцентрированных лекарственных средств, таких как типичные жидкие инсулиновые препараты, непреднамеренное введение лекарственного средства в организм, вызванное переключением гидрораспределителя, может стать причиной нежелательных и потенциально тяжелых медицинских осложнений.
В типичном компоновочном решении дозирующее устройство 3 с дозировочным насосом 30 и гидрораспределителем 31 выполнено в виде компактного устройства интегральной конструкции. Таким образом, насосное отверстие 301, в отличие от заправочного отверстия 310 и выпускного отверстия 311, является недоступным извне дозирующего устройства 3. В типичном варианте выполнения дозирующий цилиндр имеет внутренний диаметр от 3 до 5 мм, а ход поршня 302 составляет от 5 до 15 мм.
Что касается гидрораспределителя 31, также следует заметить, что на фиг. 2 показаны только состояния 315а, 315b, в которых или заправочное отверстие 310, или выпускное отверстие 311 сообщается с насосным отверстием 301. Вместе с тем, гидрораспределитель может находиться и в промежуточном состоянии, в котором все три отверстия 301, 310, 311 перекрыты, в результате чего насос заперт.Однако в типичном варианте выполнения и режиме работы гидрораспределитель принимает такое промежуточное состояние только в процессе переключений, происходящих за пренебрежимо малое время.
Узел 2 привода насоса содержит ведущий элемент 21 привода насоса, выполненный с возможностью разъемного сопряжения с ведомым элементом 303 привода насоса для перемещения поршня внутри дозирующего цилиндра 300, как пояснялось выше, как в направлении выдвижения, так и в направлении отвода. Узел 2 привода насоса также содержит исполнительный механизм 20 привода насоса, обычно включающий в себя двигатель, например стандартный электродвигатель постоянного тока, шаговый электродвигатель или электронно-коммутируемый, или бесщеточный, электродвигатель постоянного тока. Узел 2 привода насоса также содержит передаточный механизм 20а с понижающей передачей и передачей, преобразующей вращательное движение в линейное, в частности с винтовой передачей, преобразующей вращательное движение двигателя исполнительного механизма в реверсируемое линейное движение ведущего элемента 21 привода насоса, сообщаемое поршню 302 посредством ведомого элемента 303 привода насоса. Ведущий элемент 21 привода насоса может быть выполнен в виде толкателя. Ведомый элемент 303 привода насоса может быть прочно прикреплен к дистальному участку поршня 302 или встроен в него. Ведущий элемент 21 привода насоса и ведомый элемент 303 привода насоса выполнены с возможностью образования самозапирающегося соединения, способного передавать толкающие и тянущие усилия, например в виде байонетного соединения, защелкивающегося разъема и т.п.Возвратно-поступательное движение ведущего элемента 21 привода насоса приводит к соответствующему возвратно-поступательному движению поршня в проксимальном и дистальном направлениях. В качестве альтернативы ведущий элемент 21 привода насоса выполнен в виде приводной гайки или ходового винта, а ведомый элемент привода насоса - соответственно в виде ходового винта или приводной гайки.
Узел 1 привода гидрораспределителя содержит исполнительный механизм 10 привода гидрораспределителя и ведущий элемент 12 привода гидрораспределителя, соединяемый, т.е. выполненный с возможностью соединения, с ведомым элементом 312 привода гидрораспределителя. Примеры выполнения узла 1 привода гидрораспределителя и ведомого элемента 312 привода гидрораспределителя раскрыты в европейской патентной заявке 16173361.3 и в публикации WO 2015/082305, на содержание которых в этой связи приводится ссылка.
Блок управления 40 управляет, в целом, работой амбулаторного инфузионного устройства и амбулаторной инфузионной системы и, в частности, работой исполнительного механизма 10 привода гидрораспределителя и исполнительного механизма 20 привода насоса. Блок управления 40 обычно включает в себя один или несколько микрокомпьютеров и/или микроконтроллеров с соответствующим компьютерным программным кодом, или встроенным программным обеспечением, для управления работой амбулаторной инфузионной системы. Блок управления 40 обычно также содержит периферийные интегральные схемы, известные из уровня техники.
Узел 2 привода насоса, узел 1 привода гидрораспределителя и блок управления 40 (схема управления), как правило, входят в состав амбулаторного инфузионного устройства как единого компактного устройства. Амбулаторное инфузионное устройство рассчитано на длительный срок службы, составляющий несколько месяцев, например шесть месяцев, или даже несколько лет, тогда как дозирующее устройство 3 и резервуар 5 являются одноразовыми изделиями, имеющими значительно более короткий срок службы, обычно исчисляемый несколькими днями и ограниченный, например, двумя неделями в зависимости от индивидуальных потребностей пациента в лекарственном средстве. Поэтому ведущий элемент 12 привода гидрораспределителя и ведущий элемент 21 привода насоса, относящиеся к амбулаторному инфузионному устройству, а также ведомый элемент 303 привода насоса и ведомый элемент 312 привода гидрораспределителя, относящиеся к дозирующему устройству 3, выполнены разъемно соединяемыми, т.е. соединяемыми с возможностью их разъединения, в том смысле, что рассмотренное выше соединение между ведущим элементом 21 привода насоса и ведомым элементом 303 привода насоса, а также между ведущим элементом 12 привода гидрораспределителя и ведомым элементом 312 привода гидрораспределителя может быть снято (расцеплено) без повреждения ведущего элемента 21 привода насоса и ведущего элемента 12 привода гидрораспределителя. Вместе с тем, в качестве альтернативы, амбулаторная инфузионная система, включая в себя дозирующее устройство 3, узел 2 привода насоса и узел 1 привода гидрораспределителя, может быть выполнена в виде полностью интегрального устройства, рассчитанного на определенное время его применения. В этом случае соединение не обязательно должно быть разъемным, как описано выше, а вместо этого может быть и неразъемным.
В дальнейшем осуществление изобретения рассматривается со ссылкой на фиг. 2. На этом чертеже приведена блок-схема способа, который может выполняться амбулаторным инфузионным устройством и амбулаторной инфузионной системой, показанными на фиг. 1. Отдельные шаги способа выполняются под контролем блока управления 40.
Приведенная на фиг. 2 блок-схема отражает нормальную работу амбулаторной инфузионной системы, которая предполагается находящейся в инициализированном и прокачанном (для удаления воздуха из жидкостного тракта) состоянии, как пояснялось выше.
Хотя это и не существенно, предполагается, во-первых, что поршень 302 вначале находится в своем крайнем выдвинутом положении, и заполненный жидкостью объем дозирующего цилиндра соответственно минимален, как правило - пренебрежимо мал. Предполагается также, что гидрораспределитель 31 находится в состоянии подачи. Кроме того, предполагается, что жидкостная система в целом, в том числе инфузионная линия 890 с интерфейсом места инфузии, прокачана, т.е. заполнена жидким лекарственным средством. Вместе с тем, в некоторых вариантах осуществления изобретения может присутствовать некоторое количество газа, в частности воздуха.
Рабочий процесс начинается на шаге S. На шаге S1 приводится в действие исполнительный механизм 10 привода гидрораспределителя для переключения гидрораспределителя 31 в состояние заправки, в котором дозирующий цилиндр 30 сообщается с резервуаром 5.
На следующем шаге S2 приводится в действие исполнительный механизм 20 привода насоса для перемещения ведущего элемента 21 привода насоса, а соответственно и поршня 302, в направлении отвода и в отведенное положение поршня, что сопровождается увеличением объема между поршнем 302 и насосным отверстием 301. Благодаря тому, что дозирующий цилиндр сообщается с резервуаром 5, жидкое лекарственное средство соответственно всасывается в дозирующий цилиндр 300. В принципе, поршень 302 может быть перемещен на любое требуемое расстояние (вплоть до обусловленного конструкцией максимального расстояния перемещения, т.е. хода поршня), в результате чего дозирующий цилиндр 300 заполняется жидкостью в требуемом объеме. Для простоты можно принять допущение, что поршень 302 перемещается в его крайнее отведенное положение, т.е. дозирующий цилиндр 300 заполняется до своего максимального располагаемого объема. Вместе с тем, это не является существенным.
На следующем шаге S3 приводится в действие исполнительный механизм 20 привода насоса для перемещения ведущего элемента 21 привода насоса, а соответственно и поршня 302, в направлении выдвижения на расстояние компенсации мертвого хода. По сравнению с предыдущим шагом S2 направление действия узла 20 привода насоса изменилось на противоположное. Поскольку между шагами S2 и S3 состояние гидрораспределителя 31 не изменяется, на шаге S3 дозирующий цилиндр 300 по-прежнему сообщается с резервуаром 5 лекарственного средства. Соответственно, на шаге S3 жидкое лекарственное средство вытесняется из дозирующего цилиндра 300 обратно в резервуар 5 жидкого лекарственного средства.
В принципе, объем жидкости, вытесняемой из дозирующего цилиндра 300 (при перемещении поршня в направлении выдвижения), или всасываемой в дозирующий цилиндр 300 (при перемещении поршня в направлении отвода) определяется произведением пути перемещения поршня и площади внутреннего поперечного сечения дозирующего цилиндра 300. Соответственно, точность дозирования достигается управлением перемещением поршня. В системе привода амбулаторной инфузионной системы, включающей в себя исполнительный механизм 20 привода насоса, передаточный механизм 20а, ведущий элемент 21 привода насоса, ведомый элемент 303 привода насоса и поршень 302, обычно присутствует некоторый неизбежный люфт, а значит и мертвый ход (при изменение направления действия привода на противоположное), значительная часть которого обычно порождается передачей, преобразующей вращательное движение в линейное. Этот мертвый ход, а также упругость уплотнения, обычно имеющегося у поршня, нужно преодолевать при каждой смене направления движения поршня, прежде чем поршень 302 будет перемещаться в соответствии с управляющим воздействием на его привод, и дозирование можно будет осуществлять с требуемой точностью. Это достигается осуществлением предлагаемого в изобретении способа на шаге S3, когда дозирующий цилиндр 300 связан с резервуаром 5. Расстояние компенсации мертвого хода подбирается таким образом, чтобы соответствовать величине мертвого хода плюс некоторый запас надежности, позволяющий учитывать упругую деформацию уплотнения поршня, как пояснялось выше. Объем жидкого лекарственного средства, вытесняемый на шаге S3 обратно в резервуар 300, соответственно несколько меньше, чем можно было бы ожидать, исходя из расстояния компенсации мертвого хода, причем разница между таким ожидаемым объемом и фактически вытесняемым обратно в резервуар объемом, обусловлена мертвым ходом.
На следующем шаге S4 исполнительный механизм 10 привода гидрораспределителя приводится в действие для переключения гидрораспределителя 31 в состояние подачи, в результате чего дозирующий цилиндр 300 сообщается с инфузионной линией 890 и интерфейсом места инфузии. Шаги S1, S2, S3, S4 в совокупности составляют программу заправки, или повторной заправки, дозирующего цилиндра 30.
На следующем шаге S50 поршень 302 перемещается в направлении выдвижения в шаговом режиме на приращение своего хода или пути. Поскольку гидрораспределитель 31 находится в состоянии подачи, из дозирующего цилиндра 300 соответственно вытесняется и вводится в организм пациента 900 соответствующее (шаговому перемещению поршня) "дискретное" количество жидкого лекарственного средства. Поскольку на предыдущем шаге S4 мертвый ход скомпенсирован, введение лекарственного средства в организм осуществляется с высокой точностью. Введение в организм жидкого лекарственного средства на шаге S50 может осуществляться в болюсном режиме в соответствии с командой пациента или в базальном режиме следующими друг за другом шагами, или импульсами. Процедуры введения в организм лекарственного средства в базальном пошаговом режиме осуществляются под контролем блока управления 40 по существу непрерывно и в соответствии с профилем (графиком) базального введения, обычно переменным во времени, например регулируемым в соответствии с циркадными ритмами. Например, введение в организм лекарственного средства в базальном пошаговом режиме выполняется с фиксированным временным интервалом, например каждые три минуты. В качестве альтернативы, при введении лекарственного средства в базальном пошаговом режиме на каждом шаге может подаваться дискретный объем лекарственного средства, составляющий, например 0,05 ME (международных единиц), а временной интервал между такими шагами может изменяться в соответствии с профилем базального введения.
На следующем шаге S51 определяется то, превышает ли объем остающегося в дозирующем цилиндре 300 жидкого лекарственного средства порог необходимости повторной заправки, и в зависимости от результата этого определения рабочий процесс разветвляется. Если ответ утвердительный, рабочий процесс возвращается к шагу S50, и может быть выполнен следующий шаг введения лекарственного средства в базальном режиме или введение лекарственного средства в болюсном режиме. Следует отметить, что следующее введение лекарственного средства обычно выполняется не сразу, а по истечении временного интервала, как пояснялось выше, или в любое время по требованию в виде болюса. Поскольку между шагами введения лекарственного средства направление действия привода не изменяется на противоположное, мертвый ход отсутствует.
Порог необходимости повторной заправки может быть нулевым или по существу нулевым. В этом случае дозирующий цилиндр 300 полностью опорожняется, пока поршень 300 не окажется в обусловленном конструкцией крайнем выдвинутом положении, после которого дальнейшее выдвижение поршня невозможно, как пояснялось выше. Вместе с тем, в качестве альтернативы порог необходимости повторной заправки может быть несколько большим.
Если ответ на шаге S51 отрицательный, это означает, что объем остающегося в дозирующем цилиндре 300 жидкого лекарственного средства мал, и рабочий процесс продолжается переходом на шаг S52. На шаге S52 определяется то, достаточен ли объем остающегося в резервуаре 5 жидкого лекарственного средства для повторной заправки дозирующего цилиндра 300, и в зависимости от результата этого определения рабочий процесс разветвляется.
Если ответ на шаге S52 утвердительный, рабочий процесс продолжается переходом к шагу S1, рассмотренному выше, и дозирующий цилиндр 300 повторно заполняется жидким лекарственным средством. Если ответ на шаге S52 отрицательный, использование резервуара 5 (а возможно, и дозирующего устройства 3) завершено, и рабочий процесс заканчивается на шаге Е. Пациенту предпочтительно выдается соответствующее указание, и может быть запущена программа замены резервуара или одноразового компонента (на чертеже не показана).
Чтобы подчеркнуть аспекты, имеющие в контексте настоящего изобретения особую важность, следует сделать оговорку, что показанный на фиг. 2 рабочий процесс соответствует базовому варианту осуществления изобретения, и в него могут быть внесены различные изменения.
Например, для определения необходимости повторной заправки дозирующего цилиндра 300 перед следующим введением лекарственного средства на шаге S51 используется простое сравнение с порогом. В качестве альтернативы, дозирующий цилиндр 300 опорожняется полностью или по существу полностью, даже если объем остающегося в дозирующем цилиндре 300 жидкого лекарственного средства меньше подлежащего введению количества жидкого лекарственного средства. Недостающее количество жидкого лекарственного средства (т.е. количество, которое не удалось ввести до повторной заправки) может быть сохранено блоком управления 40 в памяти как подлежащее переносу на следующее введение. После повторной заправки дозирующего цилиндра путем выполнения шагов SI, S2, S3, S4, как пояснялось выше, перенесенное количество может быть введено при следующем шаге введения (шаг S50).
В еще одном варианте шаги S51, S52 могут выполняться до шага S50, а порог необходимости повторной заправки на шаге S51 может при необходимости быть переменным и может соответствовать количеству жидкого лекарственного средства, которое впоследствии должно вводиться на шаге S50. В подобном варианте гарантируется возможность выполнения этапа введения (шаг S50) без необходимости промежуточной повторной заправки.
Кроме того, проверка состояния дозирующего устройства (шаг S51) может выполняться непрерывно во время выполнения шага S50 или вместе с ним.
Кроме того, шаг S52 может быть модифицирован таким образом, чтобы повторная заправка дозирующего цилиндра 200 из резервуара 5 допускалась, даже если количество лекарственного средства в резервуаре недостаточно для полной заправки. В этом случае шаг S2 может быть модифицирован для ограничения расстояния, на которое поршень перемещается в направлении отвода, таким образом, чтобы количество жидкого лекарственного средства, всасываемое в дозирующий цилиндр 300, соответствовало остаточному количеству жидкого лекарственного средства в резервуаре 5, определенному на предыдущем шаге S52, возможно включая запас надежности на остаточное количество жидкости в резервуаре 5. Другие варианты и аспекты стратегий (повторной) заправки и дозирования, которые могут использоваться в контексте настоящего изобретения, раскрыты в публикации WO 2012/140063.
Как пояснялось выше, шаг S3 предусматривает вытеснение жидкого лекарственного средство из дозирующего цилиндра 300 обратно в резервуар 5. В этом контексте особенно выгодным является выполнение резервуара 5 гибким (мягким) или полугибким (полумягким), например, как предлагается в публикации WO 2012/065780. Гибкий или полугибкий резервуар имеет то преимущество, что для увеличения или уменьшения его внутреннего объема по существу не требуется приложения давления жидкости/или механического усилия. Вместе с тем, в качестве альтернативы резервуар 5 также может представлять собой картридж с поршнем, установленным в картридже плотно и подвижно, как это широко известно для стандартных инфузионных систем с резервуарами шприцевого типа. В этом случае трение поршня по стенке картриджа должно быть достаточно малым для того, чтобы поршень мог перемещаться в картридже от давления жидкости при ее подаче в картридж посредством дозирующего устройства 3 или от разрежения, возникающего при всасывании жидкости из картриджа посредством дозирующего устройства 3.
Амбулаторное инфузионное устройство может содержать датчики, измеряющие уровень заполнения резервуара 5 и/или дозирующего цилиндра 300, во втором случае например, посредством определения положения поршня 302 на пути его перемещения, как описано, например, в публикации WO 2012/140052. Вместе с тем, в качестве альтернативы, объем заполнения резервуара 5 и в особенности объем заполнения дозирующего цилиндра 300, который используется на шагах S51, S52, можно определять путем вычислений, увеличивая или уменьшая соответствующий счетчик объема в соответствии с перемещением поршня и соответствующим изменением объема жидкости в дозирующем цилиндре 300. Достижение поршнем крайних отведенного и выдвинутого положений можно определять, например, контролируя работу исполнительного механизма 20 привода насоса, поскольку в крайних положениях дальнейшее перемещение поршня 302 становится невозможным, в результате чего исполнительный механизм привода насоса стремится остановиться. Это можно обнаруживать, например, контролируя протекающий через электродвигатель ток и/или оценивая сигнал энкодера, например вращательного инкрементного энкодера на валу двигателя. Энкодер как часть исполнительного механизма 20 привода насоса также может использоваться для контроля работы узла 2 привода насоса, в частности во время введения лекарственного средства в организм пациента (шаг S50). Следует отметить, что проведению контроля на исполнительном механизме 20 привода насоса присуща некоторая неточность из-за мертвого хода. Однако это некритично, поскольку после (повторной) заправки дозирующего цилиндра 300 и перед введением лекарственного средства в организм пациента на шаге S50 на шаге S3 была выполнена компенсация мертвого хода.
Изобретение относится к медицинской технике, а именно амбулаторным инфузионным устройствам. Устройство содержит узел (2) привода насоса, узел (1) привода гидрораспределителя и блок управления (40). Узел (2) привода насоса содержит исполнительный механизм (20) привода насоса и ведущий элемент (21) привода насоса, соединенный с исполнительным механизмом (20) привода насоса и соединяемый с поршнем (302) дозировочного насоса (30) для передачи от исполнительного механизма (20) привода насоса на поршень (302) силы и/или крутящего момента привода насоса. Узел (1) привода гидрораспределителя содержит исполнительный механизм (10) привода гидрораспределителя и ведущий элемент (12) привода гидрораспределителя, соединенный с исполнительным механизмом (10) привода гидрораспределителя и соединяемый с гидрораспределителем (31) для передачи от исполнительного механизма (10) привода гидрораспределителя на гидрораспределитель (31) силы и/или крутящего момента для переключения гидрораспределителя (31). Блок управления (40) выполнен с возможностью управления неоднократным выполнением последовательности, включающей следующие этапы: а) приведение в действие исполнительного механизма (10) привода гидрораспределителя для переключения гидрораспределителя (31) в состояние заправки; б) приведение в действие исполнительного механизма (20) привода насоса для перемещения поршня (302) в направлении отвода; в) приведение в действие исполнительного механизма (20) привода насоса для перемещения поршня (302) в направлении выдвижения, противоположном направлению отвода, на расстояние компенсации мертвого хода; г) приведение в действие исполнительного механизма (10) привода гидрораспределителя для переключения гидрораспределителя (30) из состояния заправки в состояние подачи; д) приведение в действие исполнительного механизма (20) привода насоса для дальнейшего перемещения поршня (302) в направлении выдвижения, совершаемого в пошаговом режиме в течение длительного периода времени. 3 н. и 12 з.п. ф-лы, 2 ил.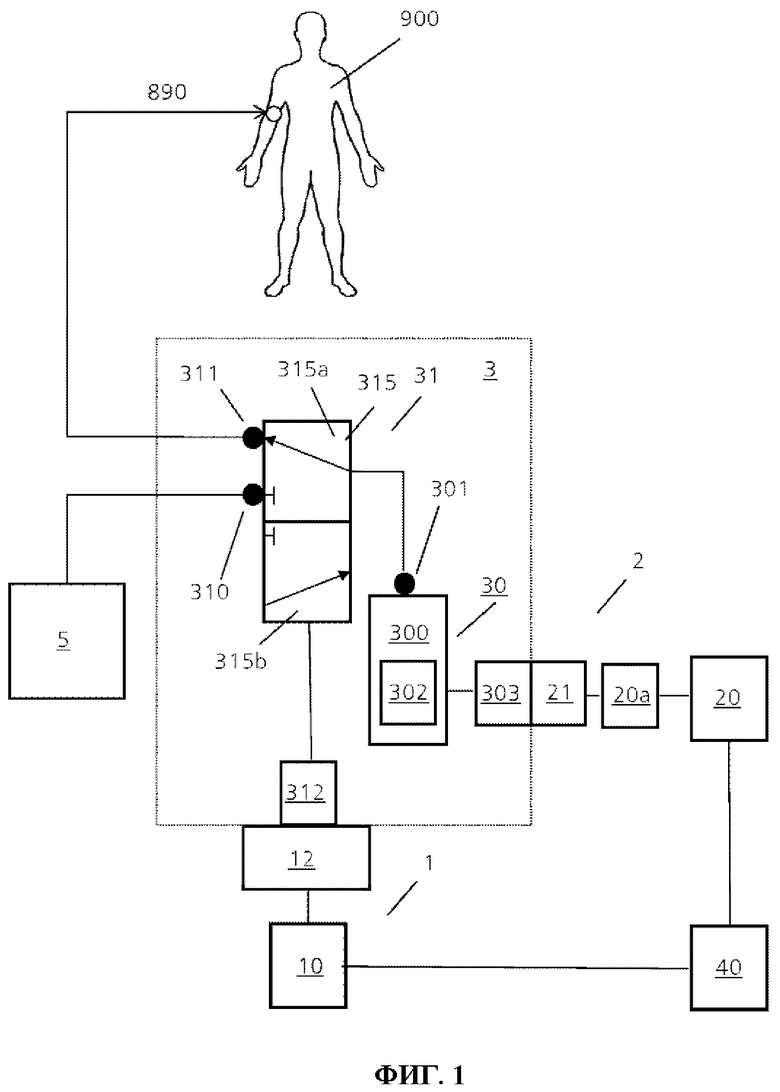
1. Амбулаторное инфузионное устройство, содержащее:
- узел (2) привода насоса, содержащий исполнительный механизм (20) привода насоса и ведущий элемент (21) привода насоса, соединенный с исполнительным механизмом (20) привода насоса и соединяемый с поршнем (302) дозировочного насоса (30) для передачи от исполнительного механизма (20) привода насоса на поршень (302) силы и/или крутящего момента привода насоса;
- узел (1) привода гидрораспределителя, содержащий исполнительный механизм (10) привода гидрораспределителя и ведущий элемент (12) привода гидрораспределителя, соединенный с исполнительным механизмом (10) привода гидрораспределителя и соединяемый с гидрораспределителем (31) для передачи от исполнительного механизма (10) привода гидрораспределителя на гидрораспределитель (31) силы и/или крутящего момента для переключения гидрораспределителя (31);
- блок управления (40), выполненный с возможностью управления неоднократным выполнением последовательности, включающей следующие этапы:
а) приведение в действие исполнительного механизма (10) привода гидрораспределителя для переключения гидрораспределителя (31) в состояние заправки;
б) приведение в действие исполнительного механизма (20) привода насоса для перемещения поршня (302) в направлении отвода;
в) приведение в действие исполнительного механизма (20) привода насоса для перемещения поршня (302) в направлении выдвижения, противоположном направлению отвода, на расстояние компенсации мертвого хода при нахождении гидрораспределителя (31) в состоянии заправки;
г) приведение в действие исполнительного механизма (10) привода гидрораспределителя для переключения гидрораспределителя (30) из состояния заправки в состояние подачи;
д) приведение в действие исполнительного механизма (20) привода насоса для дальнейшего перемещения поршня (302) в направлении выдвижения, совершаемого в пошаговом режиме в течение длительного периода времени.
2. Амбулаторное инфузионное устройство по п. 1, в котором расстояние компенсации мертвого хода составляет от 0,3 до 1 мм.
3. Амбулаторное инфузионное устройство по одному из предыдущих пунктов, в котором блок управления (40) выполнен с возможностью запуска последовательности этапов (а)-(д) при нахождении поршня в крайнем выдвинутом положении.
4. Амбулаторное инфузионное устройство по одному из предыдущих пунктов, в котором блок управления (40) выполнен с возможностью прекращения приведения в действие исполнительного механизма (20) привода насоса на этапе (б) при занятии поршнем (302) крайнего отведенного положения.
5. Амбулаторное инфузионное устройство по одному из предыдущих пунктов, в котором узел (2) привода насоса выполнен в виде привода вращения или привода линейного перемещения.
6. Амбулаторное инфузионное устройство по одному из предыдущих пунктов, в котором ведущий элемент (12) привода гидрораспределителя содержит палец для зацепления с ведомым элементом (312) привода гидрораспределителя (31).
7. Амбулаторное инфузионное устройство по одному из предыдущих пунктов, в котором ведущий элемент (12) привода гидрораспределителя представляет собой входное звено шагового механизма переключения, в частности мальтийского механизма.
8. Амбулаторное инфузионное устройство по одному из предыдущих пунктов, в котором исполнительный механизм (10) привода гидрораспределителя содержит шаговый электродвигатель или привод на основе сплава с эффектом памяти формы.
9. Амбулаторное инфузионное устройство по одному из предыдущих пунктов, в котором блок управления (40) выполнен с возможностью определения того, что поршень находится в крайнем отведенном положении или в крайнем выдвинутом положении.
10. Амбулаторное инфузионное устройство по одному из предыдущих пунктов, вводимое в разъемное соединение с дозирующим устройством (3) посредством соединяющего движения.
11. Амбулаторное инфузионное устройство по п. 10, в котором узел (1) привода гидрораспределителя выполнен таким образом, что во время соединяющего движения он остается вне зацепления с гидрораспределителем (31).
12. Амбулаторная инфузионная система, включающая в себя амбулаторное инфузионное устройство по одному из предыдущих пунктов и дозирующее устройство (3), содержащее:
- дозировочный насос (30), содержащий дозирующий цилиндр (300) и поршень (302), установленный внутри дозирующего цилиндра (300) плотно и с возможностью перемещения между крайним отведенным положением и крайним выдвинутым положением;
- гидрораспределитель (31), имеющий заправочное отверстие (310), сообщаемое с резервуаром (5) жидкого лекарственного средства, выпускное отверстие (311), сообщаемое с интерфейсом (890) места инфузии, и запорный элемент (315), подвижный между положением заправки, в котором он сообщает заправочное отверстие (310) с дозирующим цилиндром (300), и альтернативном положению заправки положением подачи, в котором он сообщает дозирующий цилиндр (300) с выпускным отверстием (311);
- ведомый элемент (303) привода насоса, соединенный с поршнем (302) или выполненный за одно целое с ним;
- ведомый элемент (312) привода гидрораспределителя, соединенный с запорным элементом (315) или выполненный за одно целое с ним;
причем ведущий элемент (12) привода гидрораспределителя взаимодействует с ведомым элементом (312) привода гидрораспределителя, а ведущий элемент (21) привода насоса взаимодействует с ведомым элементом (303) привода насоса.
13. Способ компенсации мертвого хода для дозирующего устройства (3), предназначенного для инфузии жидкого лекарственного средства, включающий неоднократное выполнение последовательности следующих этапов:
а) переключение гидрораспределителя (31) в состояние заправки;
б) перемещение поршня (302) в направлении отвода в отведенное положение;
в) перемещение поршня (302) в направлении выдвижения, противоположном направлению отвода, на расстояние компенсации мертвого хода при нахождении гидрораспределителя (31) в состоянии заправки;
г) переключение гидрораспределителя (31) из состояния заправки в состояние подачи;
д) дальнейшее перемещение поршня (302) в направлении выдвижения, совершаемое в пошаговом режиме в течение длительного периода времени, в выдвинутое положение.
14. Способ по п. 13, в котором поршень (302) расположен в дозирующем цилиндре (300), а этапы б) и в) выполняют, когда дозирующий цилиндр (300) сообщается с резервуаром (5), содержащим жидкое лекарственное средство, причем на этапе б) жидкое лекарственное средство поступает в дозирующий цилиндр (300), а на этапе в) жидкое лекарственное средство вытесняется из дозирующего цилиндра (300) обратно в резервуар (5).¶
15. Способ по п. 13 или 14, в котором дозирующее устройство (3) расположено в жидкостной системе, которая перед выполнением этапов а)-д) находится в прокачанном состоянии.
| EP2921189 A1, 23.09.2015 | |||
| EP2881128 A1, 10.06.2015 | |||
| US2005238503 A1, 27.10.2005 | |||
| WO2009039214 A2, 26.03.2009. |

