Изобретение относится к геофизике и может быть использован для мониторинга положения магнитных полюсов Земли, навигации по магнитному полю, валидации моделей магнитного поля Земли, баллистического и топогеодезического обеспечения.
Важнейшими объектами мониторинга геомагнитного поля являются магнитные полюсы Земли (МПЗ) [1-3]. В последние десятилетия они быстро смещаются. Сложные гидрометеорологические условия затрудняют проведение магнитных съемок в зонах МПЗ, где магнитное поле квазивертикально. Реальные расчеты положения МПЗ проводятся раз в несколько десятилетий по данным наблюдений магнитных обсерваторий. По этим данным прогнозируется методами математического моделирования положение МПЗ. Требуются технические решения для оперативной диагностики положения МПЗ.
Модели, например, World Magnetic Model (WMM [4]) или Международная геомагнитная опорная модель IGRF (International Geomagnetic Reference Field) позволяют повысить оперативность оценки положения МПЗ. Модели должны корректироваться по данным измерений.
В качестве прототипа изобретения выбран «Способ и система магнитной дальнометрии и геонавигации», предложенный для бурения скважин [5]. В нем предложено использовать магнитный маяк - магнитный диполь в базовой скважине, формирующий низкочастотное магнитное поле. В другой скважине регистрируют индуцируемое низкочастотное магнитное поле, по которому с поправками на цель бурения оценивают траекторию бурения [5-7]. Магнитные диполи реализуются рамочными антеннами, соленоидами, феррозондовыми магнитометрами и другими устройствами, которые могут измерять магнитные поля.
В отличие от прототипа, при поиске МПЗ исторически пытались определить протяженные (в несколько десятков километров) зоны с квазивертикальным магнитным полем Земли. В предлагаемом изобретении для определения положения МПЗ используются измерения магнитного поля Земли, данные многолетних наблюдений магнитных обсерваторий. В отличие от прототипа используется масштаб природных гипотетических магнитных диполей, теоретически формирующих главное магнитное поле Земли, модели главного и аномального магнитного поля Земли. Учитываются гелиогеофизические магнитные возмущения.
Измерения техническими средствами характеристик магнитного поля и пространственно-временных координат в точке зондирования, расчет и минимизация невязок между измеренными и модельными данными магнитного поля Земли путем подбора искомого положения МПЗ - отличительные особенности предлагаемого изобретения. Кроме этого, используемые в измерениях первичные преобразователи регистрируемых характеристик магнитного поля Земли в приборах магнитометрии из-за сложных гидрометеорологических условий в зонах МПЗ и масштаба явления МПЗ выгоднее располагать вдали от МПЗ. При возможности проведения измерений морфологии магнитного поля в зоне с МПЗ уточняется положение МПЗ.
Рассчитанные координаты МПЗ приведены, например, в WMM [5], в IGRF [8], в коммерческой Британской глобальной геомагнитной модели BGGM [9] Британской геологической службы, в графических материалах характеристик магнитного поля Земли (например в Приложении к [2]).
Модели магнитного поля статистические, обобщающие данные измерений наземных магнитных обсерваторий и специальных магнитных спутниковых наблюдений. Например, модель IGRF объединяет комплекс математических моделей Главного магнитного поля Земли и скорости его изменения, и основана на методе сферического гармонического анализа [10]. Обновление коэффициентов в модели IGRF происходило каждые 5 лет под контролем Международной Ассоциации геомагнетизма и аэрономии (International Association of Geomagnetism and Aeronomy, IAGA). В 2019 г. заранее была выпущена 13-я версия модели IGRF с набором из N=13 коэффициентов для расчета скалярного потенциала V (иногда В) основного магнитного поля на поверхности Земли и выше в сферической системе координат с помощью уравнения [8]:

а=6371,2 км.
Программная реализация модели доступна всем пользователям, как и результаты моделирования положения МПЗ. При этом не скрываются ошибки моделирования, в том числе при прогнозе смещения МПЗ, где используется подбор огибающей предыдущих координат и ее экстраполяция.
Для решения задачи определения положения МПЗ предлагается использовать измерение техническими средствами характеристик магнитного поля и пространственно-временных координат в точке измерений, подбор модельного положения МПЗ, обеспечивающего минимальные разности (невязки) между измеренными и модельными данными, в том числе при гелиогеофизических возмущениях магнитосферы Земли.
Целью изобретения является оперативное измерение положения МПЗ по результатам измерений приборами характеристик магнитного поля Земли, координат в точке зондирования, временной привязки. В заявленном способе для измерений предлагается использовать первичные преобразователи магнитного поля Земли в приборах магнитометрии, навигационную аппаратуру для определения координат, хронометры или иные средства для временной привязки. Для компенсации геомагнитных возмущений в измерениях, в отличие от прототипа, используется увеличение продолжительности наблюдений за характеристиками магнитного поля, данные наблюдений магнитных обсерваторий, выбраковка аномальных измерений, полученных техническими средствами. Для измерений могут привлекаться технические средства магнитометрии, используемые в технологиях магнитной съемки, в том числе по маршрутам, пересекающих труднодоступные зоны с МПЗ, данные магнитных обсерваторий, спутниковые измерения магнитного поля, модели аномального магнитного поля, обусловленного, преимущественно, намагниченностью земных пород.
Решение обратных задач для гладких функций при сравнении измеренных и подобранных модельных данных не представляет сложности [11]. Пример этого при реализации изобретения получен в эксперименте на борту Гидрографического судна (ГС) «Маршал Геловани» в Южном океане 6-9 апреля 2020 г. с помощью штатного судового оборудования: навигационного приемника сигналов ГНСС, гирокомпаса (ориентированного на южный географический полюс), хронометра, магнитного компаса. Точность показаний компасов на значительном удалении от зоны южного геомагнитного полюса (ЮМПЗ) превышает информационную точность карт магнитных склонений по модели IGRF.
Дискретность измерений составляла 1 час. Для корректировок установок магнитного компаса использовались данные близлежащих от отрезка маршрута австралийских магнитных обсерваторий высшего стандарта качества измерений ИНТЕРМАГНЕТ [12] (GNANGARA на юго-западе Австралии и CANBERRA), в том числе для учета в измерениях поправок на аномальное магнитное поле, которое по маршруту эксперимента было спокойным и соответствовало данным модели магнитных аномалий (например, WDMAM - World Digital Magnetic Anomaly Map [13]). Модель WDMAM была создана в рамках международного научного проекта под эгидой IAGA и CGMW (Commission for the Geological Map of the World) для обобщения и картографирования характеристик магнитных аномалий, вызванных литосферой земли, на континентальных и океанических территориях по всему миру. Вариации аномального магнитного поля по маршруту судна составили от -150 до +150 нТл. Горизонтальные составляющие аномального магнитного поля по маршруту эксперимента были незначительными по сравнению с оценками внутреннего магнитного поля Земли (вклад более 95%) в полный вектор магнитной индукции (В) на земной поверхности: вблизи магнитных полюсов вектор поля достигает порядка 60000 нТл и ориентирован перпендикулярно земной поверхности, а в районе экватора, где вектор направлен почти горизонтально, - около 30000 нТл. Для примера, на широте Норвежского моря (~65° с.ш.) величина полного вектора поля составляет примерно 52000 нТл, а горизонтальная (главным образом азимутальная) составляющая этого вектора - около 11000 нТл. На Аляске (-70° с.ш.) полный вектор равен 53000 нТл, а азимутальная составляющая - примерно 8000 нТл [6].
Маршрут измерений с 17-00 по московскому времени 06.04.2020 до 13-00 09.04.2020, рассчитанный по показаниям технических средств эксперимента, представлен в прямоугольной проекции координат на фиг. 1 на фоне изогон главного магнитного поля по модели IGRF (версия 13) на 01.01.2020 г. в спокойных геомагнитных условиях из [8]: веер синих линий - это изогоны (линии равных склонений) с отклонением на север, красных - с отклонением на юг, зеленая линия - это нулевые отклонения. Красная стрелка в продолжение маршрута судна ориентирована на предполагаемое положение ЮМПЗ по модели IGRF на 01.01.2020 г. Желтые квадраты с годами - рассчитанное положение ЮМПЗ по данным магнитных обсерваторий. Оранжевая кривая - результаты моделирования смещения ЮМПЗ.
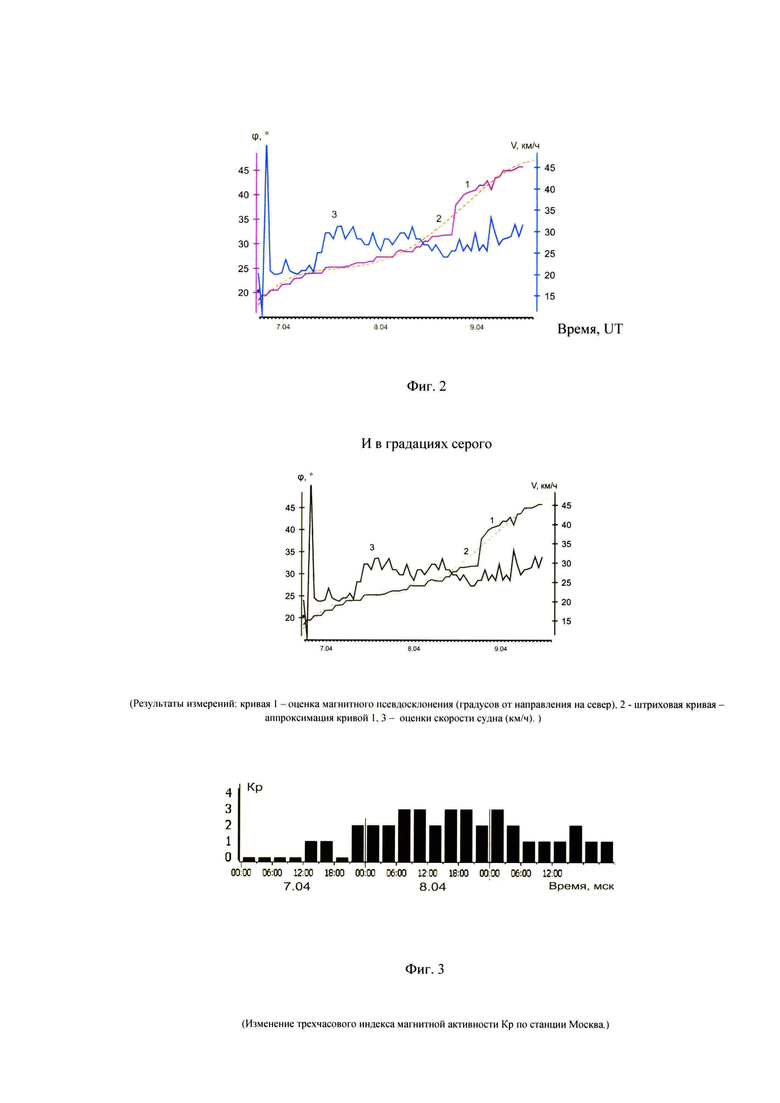
По разнице показаний магнитного компаса и гирокомпаса в точке позиционирования судна с учетом поправки на аномальное магнитное поле рассчитывались оценки магнитного псевдосклонения. Результаты расшифровки маршрутных измерений представлены графиками на фиг. 2.
Ошибки наблюдателя в определении скорости корабля в сложных гидрометеорологических условиях (всплески 6.04.2020 г.) по навигационным измерениям выбраковывались с использованием метода «контрольных карт» и аппроксимирующих зависимостей. Например, на фоне подобранного аппроксимирующего полинома 4 степени с высоким уровнем достоверности R2=0,9822 в виде: у=-9Е-06x4+0,0013x3 - 0,0596x2+1,1546х+16,35, где х - номер часа от начала эксперимента проявились аномальные изменения оценок магнитного склонения 8.04.2020 г. при слабой магнитной буре (фиг. 3).
Оценки рассчитанного по данным технических средств измерений магнитного псевдосклонения сравнивались с картированными, рассчитанными по модели IGRF. По минимальным отклонениям модельных и измеренных оценок склонений путем подбора положения МПЗ с веером изогон оценивалось положение зоны ЮМПЗ. Для примера на фиг. 4 представлены разность оценок магнитных псевдосклонений, рассчитанных по результатам измерений техническими средствами эксперимента и по модели IGRF для эпох 2000 г. и 2020 г.
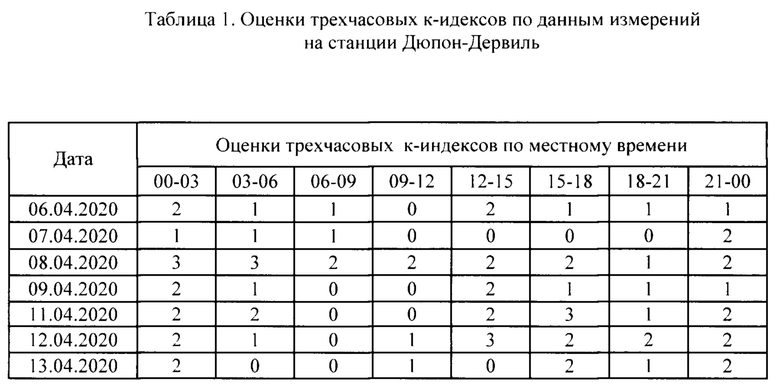
Вариации невязок 7-8.04.2020 г. обусловлены также небольшими возмущениями геомагнитного поля. Их нивелирование возможно при увеличении продолжительности и осреднении измерений, либо при фильтрации фиксируемых возмущений с помощью метода контрольных карт, или с помощью параллельных измерений характеристик магнитного поля на ближайшей геомагнитной обсерватории (обсерваториях). Например, резкое увеличение невязки в конце суток 8.04.2020 г. не вписывается в динамику оценок трехчасовых к-идексов в табл. 1, рассчитанных по данным магнитных измерений на французской антарктической станции Дюпон-Дервиль, которая находится ближе всего к зоне ЮМПЗ на побережье Антарктиды.
С использованием технологий магнитной дальнометрии при глубинном бурении для исключения ошибок часто приостанавливаются работы во время магнитных бурь, так как искусственный магнитный маяк может быть сильно зашумлен. В рассмотренном примере, как видно по данным из табл. 1, влияние слабой магнитной бури 8.04.2020 г. на невязки мало. Последующие резкие изменения невязок были связаны с механическими воздействиями сильной боковой качки на крепеж приборов и судно в целом. Это произошло при выходе корабля из зоны холодного фронта с изменением ветра и волнения. Килевая качка сменилась бортовой. Сильная волна начала бить в борт корабля.
Резкое увеличение невязки склонений 8.04.2020 г., тем не менее, сохранило разницу в положении полюса по эпохе 2000 и 2020 г.г. При сравнении измерений, полученных техническими средствами, с прогнозными изогонами по модели IGRF на эпоху 2000 г., когда положение ЮМПЗ было близко к оценкам по данным магнитных обсерваторий, невязка меньше, чем при использовании прогнозных карт магнитного склонения для 2020 г.
Возможно получить псевдокоординаты МПЗ с помощью магнитных съемок по маршрутам, пересекающим зоны МПЗ, с последующим нахождением геометрического центра этих зон. Практически выгодно зондирование положение квазинулевой изогоны для уточнения положения МПЗ.
Таким образом, результатам измерений магнитных склонений в эксперименте в Южном океане 6-9 апреля 2020 г. ближе всего соответствуют изогоны по модели IGRF 13 эпохи 01.01.2000 г. с соответствующим положением зоны ЮМПЗ, смещенным восточнее на четверть градуса от эпохи 01.01.2000 г., что минимизировало расчетные невязки.
Техническое решение предлагаемого способа обеспечивается навигационной и магнитной измерительной аппаратурой/оборудованием на различных носителях, измерениями с временной привязкой с помощью устройств или сервисов хранения времени, приемовычислителями и процессорами для проведения расчетов (фиг. 5). Возможна реализация и на магнитных обсерваториях региона с МПЗ.
Схема реализации предложенного изобретения включает:
1. Измерения техническими средствами характеристик магнитного поля Земли (на обсерватории, корабле, летательном аппарате, спутнике и т.д.);
2. Временная привязка измерений (например, по хронометрам или с использованием сервиса сигналов точного времени);
3. Координатная привязка точки/пункта зондирования магнитного поля с использованием измерений различными техническими средствами (например, приемовычислителей сигналов ГНСС, гирокомпасов, астронавигационных приборов и т.д.);
4. Верификация и валидация измерений (в том числе путем сравнения с предыдущими сериями измерений, отбраковка потенциальных ошибок измерений, например с использованием метода контрольных карт);
5. Использование технических устройств для расчета модельных характеристик магнитного поля в точке зондирования с помощью ПЭВМ или микропроцессоров, в памяти которых записаны характеристики и алгоритмы расчета магнитного поля Земли (см. например, патенты на полезную модель №131200, 125398 и т.п.), в крайнем случае, рутинной обработкой данных с использованием графических материалов по характеристикам магнитного поля для разных лет (эпох);
6. Расчет разности между измеренными техническими средствами характеристиками магнитного поля и рассчитанными данными по модели (или по графическим материалам) на разные годы;
7. Накопление оценок по п. 6 и их осреднение для различных моментов и отрезков времени;
8. Выбор первого приближения искомого положения МПЗ по модельным данным для моментов времени минимальной невязки между измерениями и модельными данными по п.п. 6-7;
9. Расчет оценки вектора средней скорости смещения МПЗ путем сравнения положения МПЗ по п. 8 с предыдущим по времени положением МПЗ по данным измерений (в том числе с магнитных обсерваторий);
10. Поиск положения модельного МПЗ, минимизирующего невязку с измерениями характеристик магнитного поля (в рассмотренном примере путем небольшого блуждающего смещения веера изогон от МПЗ по п. 8 с учетом оценки по п. 9 для первого смещения и определения новых координат МПЗ с минимумом невязки; особенно актуально в случае реверсивного движения МПЗ)
11. Фиксация положения МПЗ по критерию минимальной невязки из п. 10 и переоценка скорости его смещения;
12. Уточнение положения магнитного полюса при наличии технических средств измерений, пересекающих зону магнитного полюса Земли, например, по оценкам горизонтальных составляющих и их минимальных значений (возможно использование и других характеристик, но горизонтальные наиболее показательные) с картированием зоны измерений и последующим нахождением геометрического центра этой зоны с учетом, при возможности, например, координат проходящей (проходящих) через геомагнитный полюс положения оси зоны (осей зон) с нулевым магнитным склонением, проходящих через магнитный полюс (например, по данным спутниковых магнитометров);
13. Уточнение положения МПЗ по п. 11 с учетом данных п. 12 и переоценка (уточнение) скорости его смещения;
14. Визуализация и архивация полученных результатов расчета.
Использование открытых данных спутниковой магнитометрии в п. 13 снижает оперативность результата предлагаемого технического решения.
Для взаимодействия элементов схемы фиг. 5 могут использоваться контроллеры и приемовычислители с записанными в памяти реализациями моделей магнитного поля или графическими материалами (например, по Приложению к [2]) и программными реализациями алгоритмов подбора минимальной невязки измеряемых характеристик, которым соответствует положение МПЗ. При этом может рассчитываться удаление до МПЗ, а по архивам уточняться скорость его смещения.
Штриховыми стрелками на фиг. 5 отмечены возможные взаимодействия элементов изобретения. Центр приема, обработки и хранения информации может также рассчитывать положение МПЗ, хранить используемые для валидации измерений данные наблюдений магнитных обсерваторий, спутниковые и другие наблюдения, модели магнитного поля.
Использование устройств для регистрации магнитного поля на буях, дрифтерах, стационарных пунктах, кораблях (в том числе с информационно-аналитическими системами), воздушных судах, спутниках и т.д., с выдачей результатов в информационные системы управления [16] или в пункты/центры сбора и обработки информации, позволяет, при их систематизации, существенно повысить точность расчета положения МПЗ.
Проведение магнитных съемок на маршрутах, пересекающих зоны МПЗ, может использоваться самостоятельно или с решением обратной задачи зондирования положения МПЗ. Определение положения оси зоны (осей зон) с квазинулевым магнитным склонением проще в практическом отношении, чем зондирование зоны МПЗ.
Рентабельность предлагаемого способа обеспечивается дешевизной измерений и оперативностью получения данных о положении геомагнитного полюса.
Технический результат изобретения - повышение эффективности (по оперативности, результативности и ресурсоемкости) определения положения геомагнитного полюса техническими средствами наблюдений магнитного поля Земли, времени и координат точки измерений.
Список использованных источников
1. Яновский Б.М. Земной магнетизм. Л.: ЛГУ. 1978. 592 с.
2. Магнитные индексы. Учебное пособие/ Тертышников А.В., Сыроешкин А.В. Авдюшин С.И. и др. - Москва-Обнинск, 2014. 178 с.
3. Soloviev, A., A. Khokhlov, Е.A. Berezko, A. Lebedev, Е. Kharin I. Shestopalov, М. Mandea, V. Kuznetsov Т. Bondar,, М. Nisilevich, О. Pyatygina A. Shibaeva (2013), The Atlas of the Earth's Magnetic Field (Eds.: A. Gvishiani, A. Frolov, V. Lapshin). Publ. GC RAS, Moscow, 361 pp., doi: 10.2205/2013 BS01l_Atlas_MPZ
4. https://maps.ngdc.noaa.gov/viewers/historical_declination/
5. Дондериси Буркай, Мосс Клинтон Джеймс Способ и система магнитной дальнометрии и геонавигации / Заявка 2016116776 от 23.12.2013, Дата публикации заявки: 30.01.2018, Бюл. №4, Опубликовано: 17.10.2018, Бюл. №29.
6. Гвишиани А.Д., Лукьянова Р.Ю. Оценка влияния геомагнитных возмущений на траекторию наклонно-направленного бурения глубоких скважин в арктическом регионе / Физика Земли. 2018 г., №4, с. 19-30. DOI: 10.1134/S0002333718040051
7. Повалихин А.С., Калинин А.Г., Бастриков С.Н., Солодкий К.М. Бурение наклонных, горизонтальных и многозабойных скважин / Под общ. ред. А.Г. Калинина. М.: ЦентрЛитНефтеГаз. 2011. 647 с.
8. https://www.ngdc.noaa.gov/geomag/WMM/image.shtml
9. Macmillan S., Firth M.D., Clarke Е., Clark T.D.G., Barraclough D.R. Error estimates for geomagnetic field values computed from the BGGM. Technical Report WM/93/28C. 1993. British Geological Survey, Keyworth, Nottingham, UK.
10. Finlay C.C. et al. International Geomagnetic Reference Field: the eleventh generation // Geophysical Journal International. 2010. V. 183. Is. 3. P. 1216-1230. doi 10.1111/j.1365-246X.2010.04804.x
11. Гвишиани А.Д., Лукьянова Р.Ю. Геоинформатика и наблюдения магнитного поля Земли: российский сегмент // Физика Земли. 2015а. №2. С. 3-20.
12. Love J.J., Chulliat A. An International Network of Magnetic Observatories // Eos. 2013. V. 94. Is. 42. P. 373-374. Doi 10.1002/2013EO420001
13. http://geomag.org/models/wdmam.html
14. https://www.ngdc.noaa.gov/geomag/data/poles/SP.xy
15. https://www.ngdc.noaa.gov/geomag/data/poles/WMM2020_SP.xy
16. Лукомский Ю.А., Пешехонов В.Г., Скороходов Д.А. Навигация и управление движением судов. СПб.: "Элмор", 2002. 360 с.
Список названий иллюстраций к способу определения положения магнитного полюса Земли
Фиг. 1 - Отрезок маршрута эксперимента на карте изогон.
Фиг. 2 - Результаты измерений: кривая 1 - оценка магнитного псевдосклонения (градусов от направления на север), 2 - штриховая кривая - аппроксимация кривой 1, 3 - оценки скорости судна (км/ч).
Фиг. 3 - Изменение трехчасового индекса магнитной активности на станции Москва.
Фиг. 4 - Оценки разности магнитного склонения по модели IGRF и измерениям на судне: 1 - по модели IGRF 13 2000 г., 2 - по модели IGRF 13 2020 г.
Фиг. 5 - Схема основных этапов расчета положения МПЗ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2015 |
|
RU2601387C1 |
| СПОСОБ ВЫДЕЛЕНИЯ СОСТАВЛЯЮЩИХ ИНДУКЦИИ АНОМАЛЬНОГО МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2010 |
|
RU2437125C1 |
| СПОСОБ РАСШИРЕНИЯ РАЙОНОВ ПРИМЕНЕНИЯ НАВИГАЦИИ ПО МАГНИТНОМУ ПОЛЮ | 2010 |
|
RU2447405C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2018 |
|
RU2683113C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ГРАНИЦ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2023 |
|
RU2809926C1 |
| СПОСОБ УЧЕТА ВАРИАЦИЙ ГЕОМАГНИТНОГО ПОЛЯ ПО ДОПОЛНИТЕЛЬНЫМ СЕКУЩИМ МАРШРУТАМ ПРИ ВЫПОЛНЕНИИ МАГНИТНЫХ СЪЕМОК НА АКВАТОРИЯХ | 2011 |
|
RU2539097C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛА ЦИКЛА СОЛНЕЧНОЙ АКТИВНОСТИ | 2023 |
|
RU2823428C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| СПОСОБ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ ВЕКТОРА МАГНИТНОГО ПОЛЯ ЗЕМЛИ С АЭРОНОСИТЕЛЯ | 2011 |
|
RU2501045C2 |
| СПОСОБ ЗОНДИРОВАНИЯ СЕЙСМООРБИТАЛЬНЫХ ЭФФЕКТОВ И ВАРИАЦИЙ ПЛОТНОСТИ ВЕРХНЕЙ АТМОСФЕРЫ | 2019 |
|
RU2705161C1 |


Изобретение относится к области геофизики и может быть использовано для мониторинга положения магнитных полюсов Земли, навигации по магнитному полю, валидации моделей магнитного поля Земли, для баллистического и топогеодезического обеспечения. Для определения положения магнитного полюса Земли используется измерение характеристик магнитного поля Земли в регионе с магнитным полюсом Земли и решение обратной задачи минимизации невязок измерений и модельных характеристик магнитного поля с различным положением магнитного полюса. Для уточнения полученных оценок могут использоваться маршрутные съемки через зону магнитного полюса Земли, данные наблюдений магнитных обсерваторий и спутников. Технический результат – повышение достоверности и оперативности мониторинга положения магнитных полюсов Земли и навигации по магнитному полю Земли. 2 з.п. ф-лы, 5 ил., 1 табл.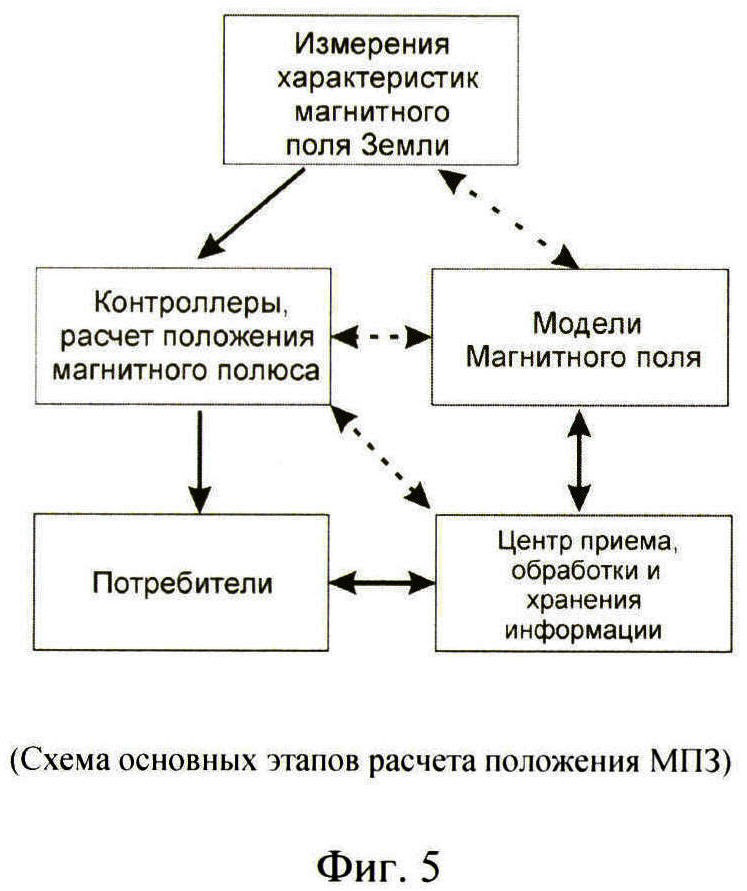
1. Способ определения положения магнитного полюса Земли на поверхности Земли, заключающийся в том, что определяют характеристики магнитного поля Земли в не менее одной точке геосфер региона с магнитным полюсом Земли, фиксируют координаты точки измерений, увеличивают продолжительность наблюдений, либо фильтруют результаты измерений в случае геомагнитных возмущений, в том числе по данным магнитных обсерваторий и моделей, используемых также для оценки и нивелирования вклада аномального магнитного поля в измерениях, рассчитывают модельные характеристики магнитного поля в точке измерений, отличающийся тем, что рассчитывают невязку измерений магнитного поля с модельными характеристиками магнитного поля при различных координатах магнитного полюса Земли, определяют положение магнитного полюса при достижении минимальной невязки измерений и результатов моделирования, уточняют оценки положения магнитного полюса при наличии продолжительных наблюдений.
2. Способ по п. 1, дополнительно отличающийся проведением магнитных съемок по маршрутам, пересекающим зону с магнитным полюсом Земли с заданными значениями горизонтальных составляющих магнитного поля и последующим нахождением геометрического центра этой зоны, использованием полученных оценок для уточнения и определения положения магнитного полюса Земли.
3. Способ по пп. 1 и 2, дополнительно отличающийся выявлением и определением проходящей (проходящих) через геомагнитный полюс положения оси зоны (осей зон) с нулевым магнитным склонением, использованием полученных оценок для уточнения и определения положения магнитного полюса Земли.
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2018 |
|
RU2683113C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2015 |
|
RU2601387C1 |
| СПОСОБ УЧЕТА ВАРИАЦИЙ ГЕОМАГНИТНОГО ПОЛЯ ПО ДОПОЛНИТЕЛЬНЫМ СЕКУЩИМ МАРШРУТАМ ПРИ ВЫПОЛНЕНИИ МАГНИТНЫХ СЪЕМОК НА АКВАТОРИЯХ | 2011 |
|
RU2539097C2 |
| Способ изменения твердости готовых абразивных инструментов | 1935 |
|
SU45509A1 |

