Изобретение относится к области управления роботизированными комплексами и может быть использовано для расширения функциональных возможностей автоматического управления группой роботизированных комплексов на основе адаптивных процессов для решения широкого круга задач, например, таких как охрана и оборона объекта, решение задач разведки.
Известен способ двухуровневого управления техническими средствами (Патент РФ № 2486565, 2013 г.), который заключается в том, что на пункте управления второго уровня формируют базу данных своих технических средств, объектов воздействия и условий обстановки, анализируют данные о своих технических средствах, объектах воздействия и условиях обстановки на полноту, при необходимости доопределения данных все объекты воздействия произвольно делят на две группы и распределяют для осуществления доопределения данных между пунктом управления второго уровня и одним из произвольно назначенных пунктом управления первого уровня, на пункте управления второго уровня доопределяют данные о выделенной группе объектов воздействия и передают доопределенные данные на все пункты управления первого уровня, одновременно с началом доопределения данных о выделенной группе объектов воздействия на пункте управления второго уровня формируют команду в виде управляющих сигналов на доопределение недостающих данных о выделенной группе объектов воздействия и на оценку эффективности воздействия своего технического средства на все объекты воздействия и передают ее по линиям связи на назначенный пункт управления первого уровня, а на остальные пункты управления первого уровня передают команду на оценку эффективности воздействия своего этой команды формируют базу данных своего технического средства, объектов технических средств на все объекты воздействия, на пунктах управления первого уровня после получения воздействия и условий обстановки, на назначенном пункте управления первого уровня доопределяют данные о выделенной группе объектов воздействия, передают на пункт управления второго уровня данные о своем техническом средстве, объектах воздействия и условиях обстановки, а на остальные пункты управления первого уровня - доопределенные данные о выделенной группе объектов воздействия, на остальных пунктах управления первого уровня получают от пункта управления второго уровня и назначенного пункта управления первого уровня доопределенные данные об объектах воздействия, на всех пунктах управления первого уровня оценивают эффективность осуществления воздействия своего технического средства на все объекты воздействия, передают на пункт управления второго уровня данные о своем техническом средстве, условиях обстановки и результаты оценки эффективности осуществления воздействия своего технического средства на все объекты воздействия, на пункте управления второго уровня собирают доопределенные данные о состоянии своих технических средств, об объектах воздействия и условиях обстановки, результаты оценки эффективности осуществления воздействия своих технических средств на все объекты воздействия, уточняют базу данных своих технических средств, объектов воздействия и условий обстановки, идентифицируют объекты воздействия, классифицируют объекты воздействия, определяют приоритеты объектов воздействия, формируют список объектов воздействия в соответствии с полученными значениями их приоритетов, оценивают возможности своих технических средств по осуществлению воздействия на объекты, внесенные в список приоритетных, формируют случайным образом список технических средств, значения эффективности которых оказались достаточными для осуществления воздействия на объекты из сформированного списка, распределяют объекты для осуществления воздействия между техническими средствами путем последовательного попарного соотнесения объектов воздействия и технических средств из соответствующих сформированных списков, формируют целеуказания штатным техническим средствам для осуществления воздействия на выбранные объекты, формируют на компьютеризированном пульте управления команды и передают их по линиям связи устройству приема команд и адресной выдачи управляющих сигналов.
Основным недостатком этого способа является то, что он не обеспечивает выполнение на пунктах управления первого уровня функции самостоятельного распределения объектов для осуществления воздействия, а также отсутствует адаптация подсистем к внешним и внутренним воздействиям. В данном способе используется децентрализованное управление техническими средствами, что снижает оперативность и приводит к высокой сложности данного способа управления техническими средствами.
Эти недостатки снижают функциональные возможности управления техническими средствами.
Известен способ централизованного управления техническими средствами и система управления для его осуществления (Патент РФ № 2451964, 2012 г.), заключающийся в формировании на компьютеризированном пульте управления команд и передаче их по линиям связи устройству приема команд и адресной выдачи управляющих сигналов, отличающийся тем, что предварительно последовательно на пункте управления второго уровня формируют базу данных своих технических средств, объектов воздействия и условий обстановки, анализируют данные о своих технических средств, объектах воздействия и условиях обстановки на полноту, при необходимости доопределения данных распределяют объекты воздействия для осуществления доопределения данных между пунктом управления второго уровня и пунктами управления первого уровня, при этом каждый объект воздействия для доопределения данных о нем распределяют на два пункта управления, на одном из которых будет осуществляться непосредственное измерение первичных характеристик, а на другом - удаленное измерение первичных характеристик, на пункте управления второго уровня доопределяют данные о выделенной части объектов воздействия путем определения первичных характеристик, измерения первичных характеристик, передачи значений первичных характеристик, предназначенных для одного или нескольких других пунктов управления в качестве удаленно измеренных, на эти пункты управления, приема удаленно измеренных на другом пункте управления значений первичных характеристик своих объектов воздействия, вычисления вторичных характеристик и селекции объектов по характеристикам, одновременно с доопределением данных о выделенной части объектов воздействия на пункте управления второго уровня формируют команды в виде управляющих сигналов на доопределение данных об объектах воздействия и передают их по линиям связи на пункты управления первого уровня, на пунктах управления первого уровня после получения этой команды формируют базу данных своего технического средства, объектов воздействия и условий обстановки, доопределяют данные об объектах воздействия путем определения первичных характеристик, измерения первичных характеристик, передачи значений первичных характеристик, предназначенных для одного или нескольких других пунктов управления в качестве удаленно измеренных, на эти пункты управления, приема удаленно измеренных на другом пункте управления значений первичных характеристик своих объектов воздействия, вычисления вторичных характеристик и селекции объектов по характеристикам, передают на пункт управления второго уровня данные о своем техническом средстве, объектах воздействия и условиях обстановки, на пункт управления второго уровня собирают доопределенные данные о состоянии своих технических средств, объектах воздействия и условиях обстановки, уточняют базу данных своих технических средств, объектов воздействия и условий обстановки, идентифицируют объекты воздействия, классифицируют объекты воздействия, определяют приоритеты объектов воздействия, формируют список объектов воздействия в соответствии с полученными значениями их приоритетов, оценивают эффективность осуществления воздействия на внесенные в список приоритетных объектов воздействия штатными техническими средствами, формируют случайным образом список технических средств, значения эффективности которых оказались достаточными для осуществления воздействия на объекты из сформированного списка, распределяют объекты для осуществления воздействия между техническими средствами путем последовательного попарного соотнесения объектов воздействия и технических средств из соответствующих сформированных списков, формируют целеуказания штатным техническим средствам для осуществления воздействия на выбранные объекты.
Система содержит соответствующим образом соединенные пункты управления, линии связи, устройства хранения базы данных, каналообразующую аппаратуру, аппаратуру передачи данных, блоки сбора и анализа данных об объектах воздействия, блоки измерения первичных характеристик, вычисления вторичных характеристик, селекции объектов по характеристикам, идентификации и классификации объектов воздействия, определения приоритетов объектов воздействия, оценки эффективности, формирования списка технических средств по эффективности, распределения объектов между техническими средствами, формирования целеуказаний техническим средствам, пульты управления, устройства отображения информации, блок сравнения, устройство приема команд и адресной выдачи управляющих сигналов и устройство управления техническим средством.
Основным недостатком данного способа централизованного управления техническими средствами и системы управления для его осуществления является централизованное управление техническими средствами, т.е. управление техническими средствами «сверху вниз», что снижает живучесть системы, так как при выведении из строя, либо неисправности головной подсистемы, перестает функционировать вся система в целом, помимо этого, данный способ централизованного управлении техническими средствами и система для его осуществления обеспечивает функционирование только части функций автоматического управления техническими средствами.
В качестве прототипа выбран способ двухуровневого адаптивного управления техническими средствами и система управления для его осуществления (Патент России № 2486564, 2014 г.), заключающийся в формировании на компьютеризированном пульте управления команд и передаче их по линиям связи устройству приема команд и адресной выдачи управляющих сигналов, отличающийся тем, что предварительно последовательно на пункте управления второго уровня формируют базу данных своих технических средств, объектов воздействия и условий обстановки, анализируют данные о своих технических средствах, объектах воздействия и условиях обстановки на полноту, при необходимости доопределения данных об объектах воздействия с помощью блока адаптивного выбора порядка доопределения данных и оценки эффективности воздействия выбирают порядок доопределения данных и оценки эффективности воздействия, возможные варианты которого в зависимости от условий обстановки, количества объектов воздействия, возможностей пунктов управления по доопределению данных и оценке эффективности воздействия, а также требуемой точности и располагаемого времени для доопределения данных и оценки эффективности воздействия состоят в том, что все объекты воздействия произвольно делят на группы и распределяют для осуществления доопределения данных между пунктом управления второго уровня и всеми пунктами управления первого уровня, при этом каждый пункт управления первого уровня назначают для осуществления сбора доопределенных данных обо всех группах объектов воздействия от остальных пунктов управления первого уровня и пунктов управления второго уровня и оценки эффективности воздействия своего технического средства по всем объектам воздействия, или все объекты воздействия произвольно делят на группы и распределяют для осуществления доопределения данных между пунктом управления второго уровня и всеми пунктами управления первого уровня, при этом произвольно назначают один из пунктов управления первого уровня для осуществления сбора доопределенных данных обо всех группах объектов воздействия от остальных пунктов управления первого уровня и пунктов управления второго уровня и оценки эффективности воздействия всех технических средств по всем объектам воздействия, или произвольно назначают один из пунктов управления первого уровня для осуществления доопределения данных и для оценки эффективности воздействия всех технических средств на все объекты воздействия, все объекты воздействия произвольно делят на две группы и распределяют для осуществления доопределения данных между пунктом управления второго уровня и назначенным пунктом управления первого уровня, или все объекты воздействия произвольно делят на две группы и распределяют для осуществления доопределения данных между пунктом управления второго уровня и одним из произвольно назначенных пунктом управления первого уровня, при этом остальные пункты управления первого уровня назначают для осуществления сбора доопределенных данных от назначенного пункта управления первого уровня и пункта управления второго уровня и оценки эффективности воздействия своего технического средства по всем объектам воздействия, затем на пункте управления второго уровня доопределяют данные о выделенной группе объектов воздействия и передают доопределенные данные на все пункты управления первого уровня или только на назначенный пункт управления первого уровня, одновременно с началом доопределения данных о выделенной группе объектов воздействия на пункт управления второго уровня формируют команды в виде управляющих сигналов и передают их по линиям связи на пункты управления первого уровня на доопределение недостающих данных об объектах воздействия и на оценку эффективности воздействия своего технического средства на все объекты воздействия, при этом на каждый пункт управления первого уровня передают данные о выделенной ему группе объектов воздействия и данные о том, какие из пунктов управления назначены для доопределения недостающих данных об объектах воздействия, или только на доопределение недостающих данных об объектах воздействия, при этом на каждый пункт управления первого уровня передают данные о выделенной ему группе объектов воздействия и данные о том, какой из пунктов управления первого уровня назначен для сбора доопределенных данных обо всех группах объектов воздействия и оценки эффективности воздействия всех технических средств по всем объектам воздействия, или - на доопределение недостающих данных о выделенной группе объектов воздействия и на оценку эффективности воздействия всех технических средств на все объекты воздействия, которую передают на назначенный пункт управления первого уровня, а на остальные пункты управления первого уровня при этом передают данные о том, какой из пунктов управления первого уровня назначен для доопределения данных об объектах воздействия и оценки эффективности воздействия всех технических средств по всем объектам воздействия, или - на доопределение недостающих данных о выделенной группе объектов воздействия и на оценку эффективности воздействия своего технического средства на все объекты воздействия и передают ее по линиям связи на назначенный пункт управления первого уровня, а на остальные пункты управления первого уровня передают команду на оценку эффективности воздействия своего технического средства на все объекты воздействия, на всех пунктах управления первого уровня после получения этой команды формируют базу данных своего технического средства, объектов воздействия и условий обстановки, на всех или только на назначенном пункте управления первого уровня доопределяют данные о выделенной группе объектов воздействия, на каждом пункте управления первого уровня передают на пункт управления второго уровня данные о своем техническом средстве, об объектах воздействия и условиях обстановки, а на остальные пункты управления первого уровня - доопределенные данные о выделенной группе объектов воздействия, или передают на пункт управления второго уровня и на назначенный пункт управления первого уровня данные о своем техническом средстве, доопределенные данные о выделенной группе объектов воздействия и условиях обстановки, или на назначенном пункте управления первого уровня передают на пункт управления второго уровня данные о своем техническом средстве, объектах воздействия и условиях обстановки, остальные пункты управления первого уровня передают на пункт управления второго уровня и на назначенный пункт управления первого уровня данные о своем техническом средстве и условиях обстановки, или на назначенном пункте управления первого уровня передают на пункт управления второго уровня данные о своем техническом средстве, объектах воздействия и условиях обстановки, а на остальные пункты управления первого уровня - доопределенные данные о выделенной группе объектов воздействия, на всех пунктах управления первого уровня получают от пункта управления второго уровня и остальных пунктов управления первого уровня доопределенные данные о выделенных им группах объектов воздействия, или на назначенном пункте управления первого уровня получают от пункта управления второго уровня доопределенные данные о выделенной ему группе объектов воздействия, а от остальных пунктов управления первого уровня - доопределенные данные о выделенных им группах объектов воздействия, об их технических средствах и условиях обстановки, или на назначенном пункте управления первого уровня получают от пункта управления второго уровня доопределенные данные о выделенной ему группе объектов воздействия, а от остальных пунктов управления первого уровня - данные об их технических средствах и условиях обстановки, или на остальных пунктах управления первого уровня получают от пункта управления второго уровня и назначенного пункта управления первого уровня доопределенные данные о выделенных им группах объектов воздействия, на всех пунктах управления первого уровня оценивают эффективность воздействия своего технического средства на все объекты воздействия, или только на назначенном пункте управления первого уровня оценивают эффективность воздействия всех технических средств своей группы на все объекты воздействия, передают на пункт управления второго уровня результаты оценки эффективности воздействия своего технического средства или всех технических средств своей группы на все объекты воздействия, на пункте управления второго уровня собирают доопределенные данные о состоянии своих технических средств, об объектах воздействия и условиях обстановки, результаты оценки эффективности воздействия своих технических средств на все объекты воздействия, уточняют базу данных своих технических средств, объектов воздействия и условий обстановки, идентифицируют объекты воздействия, классифицируют объекты воздействия, определяют приоритеты объектов воздействия, формируют список объектов воздействия в соответствии с полученными значениями их приоритетов, оценивают возможности своих технических средств по осуществлению воздействия на объекты, внесенные в список приоритетных, формируют случайным образом список технических средств, значения эффективности которых оказались достаточными для осуществления воздействия на объекты из сформированного списка, распределяют объекты для осуществления воздействия между техническими средствами путем последовательного попарного соотнесения объектов воздействия и техническими средствами из соответствующих сформированных списков, формируют целеуказания штатным техническим средствам для осуществления воздействия на выбранные объекты.
Система двухуровневого адаптивного управления, содержащая второй пульт управления, по линиям компьютерной сети связанный с устройством приема команд и адресной выдачи управляющих сигналов, линии компьютерной сети выполнены в виде последовательно соединенных аппаратуры передачи данных второго уровня, каналообразующей аппаратуры второго уровня, линий связи с пунктами управления первого уровня, каналообразующей аппаратуры первого уровня и аппаратуры передачи данных первого уровня, а также тем, что в нее дополнительно введены второй блок доопределения данных об объектах воздействия, второй выход которого соединен с третьим входом аппаратуры передачи данных второго уровня, а первый вход соединен с четвертым выходом второго пульта управления, первый вход которого соединен со вторым выходом аппаратуры передачи данных второго уровня, второй вход которой соединен со вторым выходом каналообразующей аппаратуры второго уровня, второе устройство хранения базы данных своих технических средств, объектов воздействия и условий обстановки, первый вход которого соединен со вторым выходом второго пульта управления, второй выход соединен со вторым входом, второй вход - с первым выходом блока доопределения данных об объектах воздействия, а седьмой вход - с третьим выходом аппаратуры передачи данных второго уровня, второй блок сбора и анализа данных об объектах воздействия, первый вход которого соединен с третьим выходом, а выход - со вторым входом второго пульта управления, второй вход соединен с первым выходом второго устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, блок адаптивного выбора порядка доопределения данных и оценки эффективности воздействия, первый вход которого соединен с восьмым выходом второго устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, второй вход соединен с девятым выходом, а выход - с четвертым входом второго пульта управления, блок идентификации объектов воздействия, первый вход которого соединен с шестым выходом, выход - с четвертым входом второго устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, а второй вход - с пятым выходом второго пульта управления, блок классификации объектов воздействия, первый вход которого соединен с седьмым выходом второго пульта управления, второй вход - с третьим выходом, а первый выход - с пятым входом второго устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, блок определения приоритетов объектов воздействия, первый вход которого соединен со вторым выходом блока классификации объектов воздействия, второй вход - с четвертым выходом, а первый выход - с шестым входом второго устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, блок распределения объектов воздействия между техническими средствами, первый вход которого соединен со вторым выходом блока определения приоритетов объектов воздействия, а первый выход - с третьим входом второго устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, блок оценки возможностей своей группы технических средств, первый вход которого соединен с третьим выходом блока определения приоритетов объектов воздействия, а второй вход - с пятым выходом второго устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, блок формирования списка технических средств по эффективности, вход которого соединен с выходом блока оценки возможностей своей группы технических средств, а выход - со вторым входом блока распределения объектов воздействия между техническими средствами, блок формирования целеуказаний техническим средствам, первый вход которого соединен со вторым выходом блока распределения объектов воздействия между техническими средствами, второй вход - с восьмым выходом, а выход - с третьим входом второго пульта управления, второе устройство отображения информации, первый вход которого соединен с шестым выходом второго пульта управления, второй вход - с седьмым выходом второго устройства хранения базы данных своих технических средств, объектов воздействия и условий обстановки, а третий вход - с третьим выходом блока распределения объектов воздействия между техническими средствами, которые совместно со вторым пультом управления, аппаратурой передачи данных второго уровня и каналообразующей аппаратурой второго уровня образуют пункт управления второго уровня, также введены устройство управления техническим средством, вход которого соединен с выходом устройства приема команд и адресной выдачи управляющих сигналов, первый пульт управления, первый вход которого соединен с четвертым выходом аппаратуры передачи данных первого уровня, а шестой выход - со вторым входом устройства приема команд и адресной выдачи управляющих сигналов, первое устройство отображения информации, первый вход которого соединен с пятым выходом первого пульта управления, а третий вход - со вторым выходом устройства приема команд и адресной выдачи управляющих сигналов, первое устройство хранения базы данных своего технического средства, объектов воздействия и условий обстановки, первый, а вход которого соединен с третьим выходом аппаратуры передачи данных первого уровня, второй вход - со вторым выходом первого пульта управления, а четвертый выход - со вторым входом первого устройства отображения информации, первый блок сбора и анализа данных об объектах воздействия, первый вход которого соединен с третьим выходом, выход - со вторым входом первого пульта управления, а второй вход соединен с первым выходом первого устройства хранения базы данных своего технического средства, объектов воздействия и условий обстановки, первый блок доопределения данных об объектах воздействия, второй выход которого соединен с третьим входом аппаратуры передачи данных первого уровня, первый вход соединен с четвертым выходом первого пульта управления, второй вход соединен со вторым выходом, а первый выход - с третьим входом первого устройства хранения базы данных своего технического средства, объектов воздействия и условий обстановки, блок оценки эффективности воздействия, выход которого соединен с четвертым входом, а второй вход - с третьим выходом первого устройства хранения базы данных своего технического средства, объектов воздействия и условий обстановки, первый вход блока оценки эффективности воздействия соединен с седьмым выходом первого пульта управления, первый выход которого соединен со вторым входом аппаратуры передачи данных первого уровня, второй выход которой соединен с третьим входом каналообразующей аппаратуры первого уровня, которые совместно с каналообразующей аппаратурой первого уровня, аппаратурой передачи данных первого уровня и устройством приема команд и адресной выдачи управляющих сигналов составляют пункт управления первого уровня, количество которых определяется количеством технических средств, при этом вторые входы-выходы каналообразующей аппаратуры первого уровня каждого пункта управления первого уровня соединены между собой.
Основными недостатками данного изобретения является то, что описанные функций управления техническими средствами, не позволяют выполнять такие автоматические функции как: выработка цели для охраны и обороны объекта с учетом внутреннего и внешнего воздействия на систему и ее элементы, рациональная расстановка группы технических средств на цифровой карте местности, оценка степени достижения цели, выработка базового прогнозного решения на верхнем звене управления, применяя базу знаний и базу данных, выработка индивидуального рационального решения каждым техническим средством, как самостоятельной единицей, на основе которых вырабатывается рациональное решение и команды управления для группы роботизированных комплексов, а также контроль системой своего технического состояния и каждого технического средства в отдельности. Помимо этого, в изобретении рассмотрен подход управления «снизу вверх», т.е. рассматривается система вложенных задач управления, решение частных задач используется при решении более общих, что приводит к высокой сложности данного способа управления техническими средствами, так как число вариантов решения задачи на верхних уровнях системы управления может быть велико, а для этого необходимо решить соответствующий набор частных подзадач, к тому же в изобретении не рассматривается адаптация системы к внутренним и/или внешним воздействиям, влияющих как на структуру, так и на параметры системы управления.
Эти недостатки снижают функциональные возможности как способа автоматического управления группой роботизированных комплексов на основе адаптивных процессов и системы для его осуществления, так и самих роботизированных комплексов, как основной единицы выработки рационального решения и формировании управляющих воздействий для группы роботизированных комплексов.
Задачей предлагаемого изобретения, является расширение функциональных возможностей.
Технический результат предлагаемого изобретения заключается в расширении функциональных возможностей за счет применения гибридного, т.е. централизованного и децентрализованного автоматического управления группой роботизированных комплексов, адаптации системы к внешним и внутренним воздействиям, т.е. осуществлять прогноз качества функционирования системы управления и самих роботизированных комплексов с поддержанием его на заданном уровне в течение времени решения задачи, за счет изменения значений параметров и изменения алгоритмов, т.е. самонастраивающих и самоорганизующих свойств системы, а также обученности системы к автоматической выработке базовых прогнозных решений в подсистеме управления первого уровня, с помощью предварительно сформированной базы знаний и базы данных (Свидетельство о государственной регистрации программы для ЭВМ № 2019617551, 2019617624 2019 г.), автоматического формирования и передача адресных команд управления группе роботизированных комплексов, имеющие в своем составе подсистему управления второго уровня ведущего роботизированного комплекса, которая в автоматическом режиме оценивает индивидуальное рациональное решение на поражение нарушителя автоматически выработанным каждой подсистемой управления третьего уровня роботизированного комплекса и, на основе базового прогнозного решения подсистемы управления первого уровня вырабатывает рациональное решение и формирует управляющие команды на поражение нарушителей, согласно списку приоритетности, для группы роботизированных комплексов, рационально распределяя их по целям.
Способ адаптивного группового управления роботизированными комплексами, основанный на итерационной процедуре, включающий процессы централизованного управления, заключающиеся в рациональной выработки прогнозных базовых решений и, рационального распределения роботизированных комплексов группы на основе известных методов математического и логического программирования, с доведением индивидуальных заданий до каждого комплекса мультисервисной системой связи, а также в реализации процессов централизованного и децентрализованного управления группой роботизированных комплексов на основе технологий мультиагентных систем с постоянным возобновлением итерационного цикла управления, обусловленного необходимостью перераспределения задач роботизированным комплексам в связи с изменением обстановки.
Сущность способа адаптивного группового управления роботизированными комплексами заключается в формировании команд и передаче их по линиям связи устройству приема-передачи команд и адресной выдачи управляющих сигналов, доопределению данных, формируют базу данных своих технических средств, объектов воздействия и условий обстановки отличающийся тем, что предварительно в подсистемах управления первого, второго и третьего уровней формируют базу знаний и базу данных моделей воздействий, накопление и создание библиотеки опыта своих роботизированных комплексов, моделей воздействия нарушителей и условий обстановки на полноту, варианты рациональных базовых решений оперативно-тактических задач и их результаты; формируют в подсистеме управления первого уровня подробную карту местности с указанием масштаба, на которую наносят объекты охраны, а также обозначают зону охраны и обороны, при получении задания, составляют список ведущего роботизированного комплекса, присваивают адрес каждому роботизированному комплексу, обозначают зону ответственности, сектор наблюдения (ответственности) каждому роботизированному комплексу, формируют цель решения задачи по охране и обороне объекта, анализируют и оценивают возможные варианты базовых прогнозных решений из базы знаний, в противном случае в динамической системе вырабатывают прогнозное базовое решение, моделируют боевые действия, оценивают исход прогнозного базового решения, составляют список приоритетности поражения нарушителя, анализируют и оценивают состояние и параметры подсистемы управления и системы в целом при внутреннем воздействии на систему, при необходимости включают режим адаптации; одновременно в подсистемах управления второго и третьего уровня формируют реальную обстановку на основе уточняющей информации с датчиков, вырабатывают индивидуальные рациональные решения на воздействие по группе нарушителей в зоне ответственности каждого роботизированного комплекса, на основе вероятности поражения нарушителя, времени его поражения и количества затрачиваемых боеприпасов для поражения нарушителя, анализируют и оценивают состояние и параметры подсистемы управления и системы в целом при внешнем воздействии, при необходимости включают режим адаптации, оценивают индивидуальную боевую эффективность; в подсистеме управления второго уровня оценивают индивидуальные рациональные решения, адресно назначают роботизированные комплексы на поражение нарушителя, согласно списку приоритетности цели, незадействованные роботизированные комплексы назначают для рекогносцировки и корректировки воздействия по нарушителю, при появлении нескольких нарушителей перераспределяют роботизированные комплексы согласно боевой эффективности и индивидуальному рациональному решению, формируют адресные команды управления, оценивают боевую эффективность для группы роботизированных комплексов, сохраняют в базе знаний модели воздействия нарушителей, сведения об обстановке, модели воздействия и боевую эффективность каждого роботизированного комплекса, алгоритмы работы каждой подсистемы управления.
Данный способ адаптивного группового управления роботизированными комплексами реализуется системой, содержащей в своем составе подсистемы управления первого, второго и третьего уровней управления, компьютерные линии, образующие распределенную, самоорганизующуюся мультиагентную систему связи и передачи данных, адресные каналы управления, при этом, в структуру подсистемы управления первого уровня входят: пульт ввода данных, блок формирования цели, динамическая система, блок управления, база данных, база знаний, контур адаптации, устройство приема-передачи, при этом, первый выход пульта ввода данных подсистемы управления первого уровня соединен с первым входом блока формирования цели, а второй - с входом блока базы данных, первый выход которого соединен с входами базы данных подсистем управления второго и третьего уровней, первый выход блока формирования цели соединен с входом блока базы знаний, первый выхода блока базы знаний соединен с первым входом блока управления, выход которого соединен с входом устройства приема-передачи, выход которого - с входом устройства приема-передачи подсистемы управления второго уровня - ведущего роботизированного комплекса, второй выход блока формирования цели соединен с первым входом динамической системы, второй вход - с вторым выходом блока базы знаний, а третий - с вторым выходом блока базы данных, выход динамической системы соединен с вторым входом блока управления, выход и вход контура адаптации соединен с входом и выходом подсистемы управления первого уровня соответственно, выход устройства приема-передачи соединен с входами устройств приема-передачи подсистем управления второго и третьего уровней; в состав подсистемы управления второго уровня входят: устройство приема-передачи, программно-аппаратный модуль, состоящий из: блока сбора и обработки информации, в состав которого входят: датчики и блок базы данных, устройство выработки решений, в состав которого входят блок базы знаний, блок адресного управления, контур адаптации, исполнительное устройство, при этом, выход устройства приема-передачи подсистемы управления второго уровня - с входом блока сбора и обработки информации программно-аппаратного комплекса подсистемы управления второго уровня, вход блока базы данных подсистемы управления второго уровня соединен с выходами блоков базы данных подсистем управления первого и третьего уровней, выход датчиков - с входом блока сбора и обработки информации, выход которого - с первым входом устройства выработки решения, а второй вход - с выходом блока базы знаний, первый выход блока адресного управления - с входом исполнительного устройства, выход которого - с входом блока базы знаний, второй выход блока адресного управления подсистемы управления второго уровня со вторым входом блока адресного управления подсистемы управления третьего уровня, выход и вход контура адаптации соединен с входом и выходом подсистемы управления второго уровня соответственно; в состав подсистемы управления третьего уровня входят: устройство приема-передачи, программно-аппаратный модуль, состоящий из: блока сбора и обработки информации, в состав которого входят: датчики и блок базы данных, устройство выработки решений, в состав которого входят блок базы знаний, блок адресного управления, контур адаптации, исполнительное устройство, при этом, выход устройства приема-передачи подсистемы управления третьего уровня соединен с первым входом блока сбора и обработки информации подсистемы управления третьего уровня, второй вход блока сбора и обработки информации - с выходом блока базы данных, третий вход - с выходом датчиков, выход блока сбора и обработки информации - с первым входом устройства выработки решения, второй вход устройства выработки решения - с выходом блока базы знаний, выход устройства выработки решения соединен со вторым входом блока адресного управления, выход которого - с входом исполнительного устройства, выход которого - с входом блока базы знаний, выход и вход контура адаптации соединен с входом и выходом подсистемы управления третьего уровня соответственно; количество подсистем управления третьего уровня определяется количеством роботизированных комплексов, при этом адресные входы-выходы каналообразующей аппаратуры данных и связи подсистемы управления первого уровня, подсистемы управления второго и каждого третьего уровней соединены между собой, а адресные входы-выходы каналообразующей аппаратуры адресного управления подсистемы второго уровня соединены с каждой адресной подсистемой управления третьих уровней между собой.
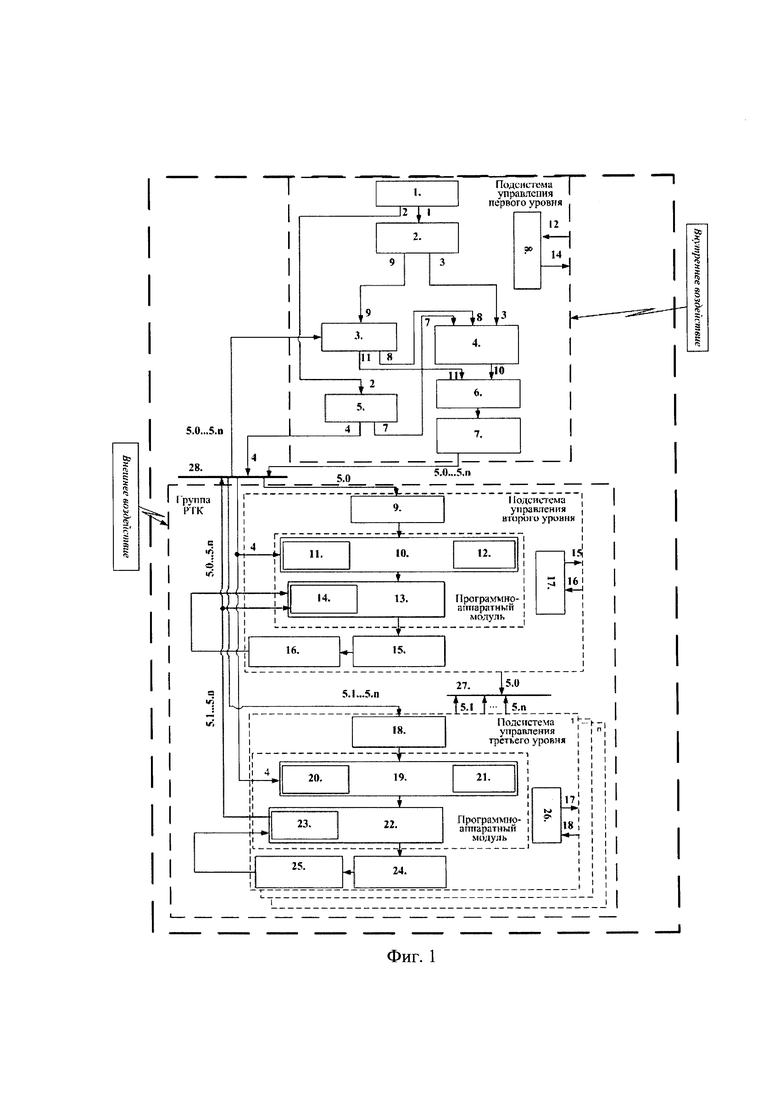
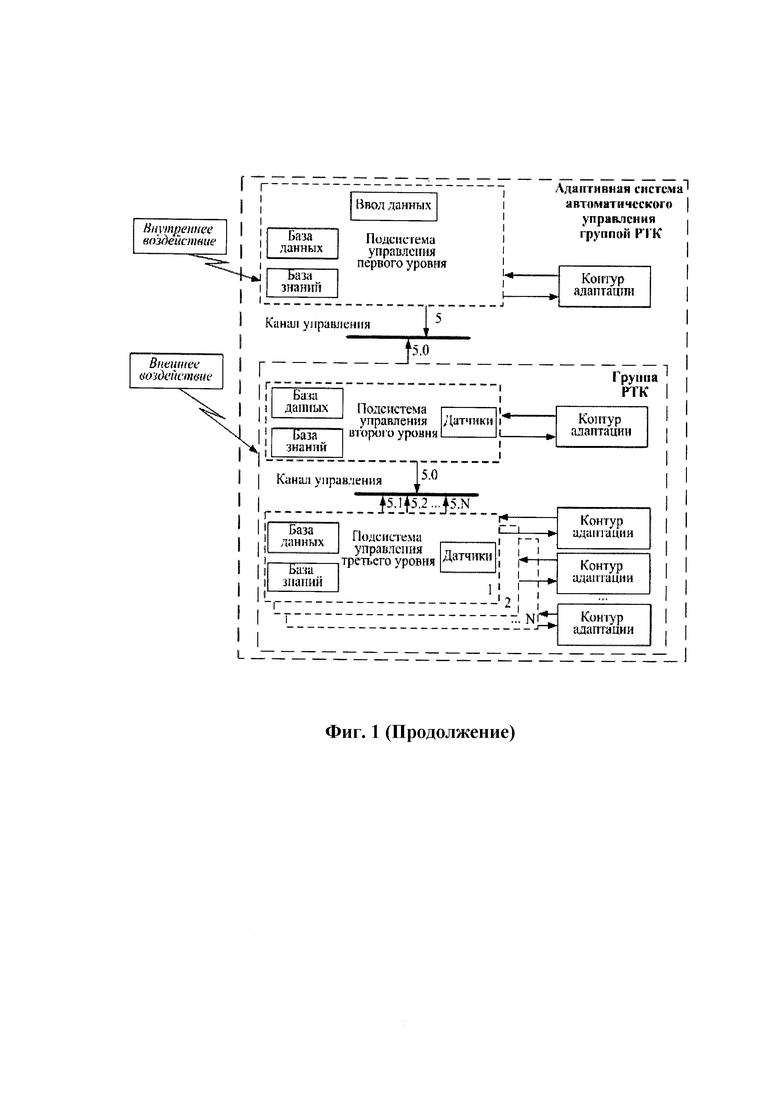
На фигуре 1 представлена структурная блок-схема системы адаптивного группового управления роботизированными комплексами.
Представленная схема группового управления роботизированными комплексами позволяет выполнять функции в автоматическом режиме, что в свою очередь увеличивает функциональные возможности как самих роботизированных комплексов, так и автоматического управления ими с требуемым качеством, а с технической точки зрения приводит к высшей степени автоматизации.
На фигуре 1 цифрами обозначены:
1 - пульт ввода данных;
2 - блок формирования цели;
3 - блок базы знаний;
4 - динамическая система;
5 - блок базы данных;
6 - блок управления;
7 - устройство приема-передачи подсистемы управления первого уровня;
8 - контур адаптации;
9 - устройство приема-передачи подсистемы управления второго уровня;
10 - блок сбора и обработки информации подсистемы управления второго уровня;
11 - блок базы данных подсистемы управления второго уровня;
12 - датчики подсистемы управления второго уровня;
13 - устройство выработки решения подсистемы управления второго уровня;
14 - блок базы знаний подсистемы управления второго уровня;
15 - блок адресного управления подсистемы управления второго уровня;
16 - исполнительное устройство подсистемы управления второго уровня;
17 - контур адаптации подсистемы управления второго уровня;
18 - устройство приема-передачи подсистемы управления третьего уровня;
19 - блок сбора и обработки информации устройство приема-передачи подсистемы управления третьего уровня;
20 - блок базы данных подсистемы управления третьего уровня;
21 - датчики подсистемы управления третьего уровня;
22 - устройство выработки решения подсистемы управления третьего уровня;
23 - Блок базы знаний подсистемы управления третьего уровня;
24 - блок адресного управления подсистемы управления третьего уровня;
25 - исполнительное устройство подсистемы управления третьего уровня;
26 - контур адаптации подсистемы управления третьего уровня;
27 - канал управления;
28 - канал данных и связи.
В системе адаптивного группового управления, реализующая данный способ, линии связи и управления выполнены в виде самонастраивающей и самоорганизующей мультиагентной компьютерной сети и содержит: подсистему управления первого уровня, состоящая из пульта ввода данных 1, параллельно соединенным с входом 1 блока формирования цели 2 и входом 2 блока базы данных 5, выход 4 которого соединен по каналу данных и связи 28 с входом 4 блока базы данных 11 подсистемы управления второго уровня и входом 4 блока базы данных 20 подсистемы управления управления третьего уровня, блок формирования цели 2 параллельно соединен выходом 9 со входом 9 блока базы знаний 3 и выходом 3 со входом 3 динамической системы 4, входы 8 и 7 динамической системы 4 параллельно соединены с выходом 8 блока базы знаний 3 и выходом 7 блока базы данных 5, входы 10 и 11 блока управления 6 параллельно соединены с выходом 10 динамической системы 4 и выходом 11 блока базы знаний 3 соответственно, выход блока управления 6 последовательно соединенный с устройством приема-передачи 7 подсистемы управления первого уровня, подсистема управления первого уровня соединена со входом 11 и выходом 12 контура адаптации, выход 5.0…5.n устройства приема-передачи 7 подсистемы управления первого уровня соединен с входом 5.0 устройства приема-передачи 9 подсистемы управления второго уровня и входом 5.1…5.n устройства приема-передачи 18 подсистемы управления третьего уровня по каналу данных и связи 28, которое последовательно соединено с входом блока сбора и обработки информации 10, который параллельно соединен с выходом блока базы данных 11 и выходом датчиков 12, вход устройства выработки решений 13 соединен с выходом блока сбора и обработки информации 10, входом блока базы знаний 14 и выходом исполнительного устройства 16, выход устройства выработки решения 13 -с входом блока адресного управления 15, подсистема управления второго уровня соединена входом 15 и выходом 16 контура адаптации 17, подсистема управления второго уроня соединена с подсистемой управления третьего уровня по каналу управления 27, выход устройства приема-передачи 18 подсистемы управления третьего уровня соединен с входом блока сбора и обработки информации 19, выход датчиков 21 и выход блока базы данных 20 параллельно соединены с блоком сбора и обработки информации 19, выход которого соединен с входом устройства выработки решений 22, а его вход - с выходом блока базы знаний 23, выход устройства выработки решений 22 соединен последовательно с блоком адресного управления 24, а его выход - с исполнительным устройством 25, выход которого соединен с входом блоком базы знаний 23, выход блока базы знаний 23 подсистемы управления второго уровня параллельно соединен с входом блоком базы знаний 14 подсистемы управления второго уровня и входом блока базы знаний 3 подсистемы управления первого уровня, подсистема управления третьего уровня соединена входом 15 и выходом 16 контура адаптации 26.
Количество подсистем управления третьего уровня определяется количеством роботизированных комплексов, при этом, адресные входы-выходы каналообразующей аппаратуры данных и связи подсистемы управления первого уровня и подсистем управления второго и каждого третьего уровней соединены между собой по адресному шифрованному каналу, а адресные входы-выходы шифрованной каналообразующей аппаратуры управления подсистемы управления второго уровня соединены с каждой подсистемой управления третьих уровней.
Заявляемый способ адаптивного группового управления роботизированными комплексами осуществляется следующим образом.
На пульт ввода данных 1 подсистемы управления первого уровня вводится информация об обстановке в районе дежурства, которая содержит в себе: сведениях о силах и средствах нарушителя, сведениях о силах и средствах своих войск, расположение на цифровой карте местности координаты объекта охраны, формируется список задействованных роботизированных комплексов группы их боевые возможности, координаты расположения комплексов на цифровой карте местности, с назначением сектора охраны, из блока базы знаний 3 загружаются варианты возможных поведенческих моделей нарушителя, список приоритетности целей нарушителя, организуется адресная система связи, передачи данных, команд управления между подсистемами управления, формируется список ведущего роботизированного комплекса в группе, в дальнейшем вся введенная информации хранится в блоках баз данных 5, 11, 20 и обновляется при изменении обстановки. В блоке формирования цели 2, при наличии в блоке базы знаний 3 готовой поведенческой модели нарушителя в данных условиях обстановки, предварительно разработанной при обучении системы, формируется прогнозное базовое решение на применение группы роботизированных комплексов, которое по каналам передачи данных и связи передается в блок управления 6 и далее через устройство приема-передачи по адресному каналу 28 в подсистему управления второго уровня.
При отсутствии в блоке базы знаний 3 подсистемы управления первого уровня готовой поведенческой модели нарушителя, динамическая система 4, получая информацию с блока базы данных 5, используя библиотеку алгоритмов, математические и имитационные модели, четкую и нечеткую логику, логическое программирование, которые хранятся в блоке базы знаний 3, в режиме реального времени на основе актуальных данных об обстановке, вырабатывает прогнозное базовое решение на применение группы роботизированных комплексов по нарушителю, которое сохраняется в базе знаний 3. В блоке управления 6 формируются команды управления группой роботизированных комплексов, которые передаются через устройство приема-передачи в подсистему управления второго уровня.
Контур адаптации 8 отслеживает качество функционирования подсистемы управления первого уровня, ее параметры, структуру и алгоритм работы и, при наличии внутреннего воздействия на систему, т.е. попытке внутреннего нарушителя ввести ложную информацию, либо изменить работу системы, блокирует подсистему и переводит ее в замкнутый режим функционирования до момента полного решения поставленной задачи.
В дальнейшем, принцип функционирования будет рассматриваться на примере единичного роботизированного комплекса и единичной подсистемы управления третьего уровня.
Одновременно в подсистеме управления третьего уровня в блоке сбора и обработки информации 19 на основе поступающих сообщений с блока базы данных 20 и с датчиков 21 - уточненных данных об обстановке, действий нарушителя, его координат и направления движения, формируется общая картина боя. В устройстве выработки решений 22 на основе опыта обучения, используя библиотеку алгоритмов, математические и имитационные модели, четкую и нечеткую логику, логическое программирование блока базы знаний 23 и актуальных данных обстановки из блока базы данных 20, вырабатывается индивидуальное рациональное решение на поражение нарушителя роботизированным комплексом, с учетом боевой эффективности комплекса и его технического состояния, которое сохраняется в базе знаний 23 и передается в устройство выработки решений 13 подсистемы управления второго уровня. Контур адаптации 26 осуществляет прогноз и оценивает качество функционирования подсистемы и поддерживает его на заданном уровне в течение всего периода динамической сцены боя, при необходимости изменяет значения параметров и алгоритмов работы подсистемы, для качественного ее функционирования.
Одновременно в подсистеме управления второго уровня вырабатывается индивидуальное рациональное решение на поражение нарушителя ведущим роботизированным комплексом, по алгоритму, описанному выше для подсистемы управления третьего уровня.
Индивидуальные решения каждой подсистемы управления третьего уровня и подсистемы управления второго уровня, сохраняются в блоке базы знаний 14 подсистемы управления второго уровня, а устройство выработки решения 13 подсистемы управления второго уровня оценивает каждое актуальное индивидуальное решение на поражение нарушителя, и на основании актуального на данный момент времени базового прогнозного решения, выработанным подсистемой управления первого уровня, вырабатывает общее рациональное решение, рационально распределяя роботизированные комплексы группы по целям нарушителя, согласно боевой эффективности и качеству решения задачи, далее через блок адресного управления 15 передает адресные команды управления на исполнительные устройства каждому задействованному для решения задачи роботизированному комплексу группы.
Незадействованные в поражении нарушителя роботизированные комплексы группы получают задачу от устройства выработки решения 13 подсистемы управления второго уровня на рекогносцировку и выдачу целеуказаний задействованным комплексам.
Во время решения задачи по поражению нарушителя, подсистема управления третьего уровня в режиме реального времени оценивает боевую эффективность роботизированного комплекса, его боевое и техническое состояние, а подсистема управления второго уровня на основании решений подсистемы управления третьего уровня - группы роботизированных комплексов, с сохранением результатов в базу знаний каждой подсистемы.
Контуры адаптации подсистем управления второго и 17 и 26 соответственно, прогнозируют и оценивают технологические процессы управления подсистем и, при необходимости соблюдения качества функционирования подсистем, самонастраивают, изменяя значения параметров и/или самоорганизуют, изменяя алгоритмы функционирования подсистем для максимизации качества функционирования подсистем.
Предлагаемое техническое решение является новым, так как из открытых и общедоступных сведений не известны предлагаемые способ адаптивного группового управления роботизированными комплексами и система для его осуществления.
Предлагаемые способ с заявленной последовательностью действий и система для его осуществления с заявленной структурой и функциональными возможностями имеют изобретательский характер, т.к. известных общедоступных технических решений явным образом не следует.
Перечисленные отличительные признаки заявляемого изобретения позволяет расширить функциональные возможности способ адаптивного группового управления роботизированными комплексами и система для его осуществления за счет автоматического гибридного управления, автоматической адаптация подсистем управления к внешним и/или внутренним воздействиям за счет самонастраивающих и самоорганизующих свойств системы, что в свою очередь повышает живучесть и конструктивность системы в целом, обученность системы, т.е. использование базы знаний и базы данных позволяет оперативно и достоверно в автоматическом режиме вырабатывать индивидуального рационального решения каждым роботизированным комплексом и группой в целом для выполнения задач охраны и обороны объекта, автоматического формирования и передачи адресных команд управления каждому роботизированному комплексу, т.е. распределенное адресное управление роботизированным комплексом группы, выполнение таких функций адаптивного управления, которые повышают функциональные возможности системы автоматического управления группой роботизированных комплексов в динамической среде функционирования.
Заявленные способ адаптивного группового управления роботизированными комплексами и система для его осуществления практически реализуемы, так как основаны на компьютерной технике и средствах управления, которые широко применяются на предприятиях промышленности и научно-исследовательских организациях, занимающихся в области автоматического и/или автоматизированного управления техническими средствами, построенными на отечественной элементной базы.
Изобретение относится к области управления техническими средствами и может быть использовано для расширения функциональных возможностей автоматического управления группой роботизированных комплексов для решения широкого круга задач, таких как охрана и оборона объекта, решение задач разведки. Применяют гибридное автоматическое управление группой роботизированных комплексов, а также автоматизацию процессов выработки роботизированными комплексами индивидуальных рациональных решений и на их основе автоматическое рациональное распределение группы роботизированных комплексов с последующей оценкой боевой эффективности за счет предварительной обученности системы. Формируют базы данных и базы знаний. Включают режим адаптации системы автоматического управления к внешним и/или внутренним воздействиям путем самонастройки и самоорганизации так, чтобы сохранилось заданное качество ее функционирования. Расширяются функциональные возможности. 2 н.з. ф-лы, 2 ил.
1. Способ адаптивного группового управления роботизированными комплексами, заключающийся в формировании команд и передаче их по линиям связи устройству приема-передачи команд и адресной выдачи управляющих сигналов, доопределению данных, формируют базу данных своих технических средств, объектов воздействия и условий обстановки, отличающийся тем, что предварительно в подсистемах управления первого, второго и третьего уровней формируют базу знаний и базу данных моделей воздействий, накопление и создание библиотеки опыта своих роботизированных комплексов, моделей воздействия нарушителей и условий обстановки на полноту, варианты рациональных базовых решений оперативно-тактических задач и их результаты; формируют в подсистеме управления первого уровня подробную карту местности с указанием масштаба, на которую наносят объекты охраны, а также обозначают зону охраны и обороны, при получении задания, составляют список ведущего роботизированного комплекса, присваивают адрес каждому роботизированному комплексу, обозначают зону ответственности, сектор наблюдения каждому роботизированному комплексу, формируют цель решения задачи по охране и обороне объекта, анализируют и оценивают возможные варианты базовых прогнозных решений из базы знаний, в противном случае в динамической системе вырабатывают прогнозное базовое решение, моделируют боевые действия, оценивают исход прогнозного базового решения, составляют список приоритетности поражения нарушителя, анализируют и оценивают состояние и параметры подсистемы управления и системы в целом при внутреннем воздействии на систему, при необходимости включают режим адаптации; одновременно в подсистемах управления второго и третьего уровня формируют реальную обстановку на основе уточняющей информации с датчиков, вырабатывают индивидуальные рациональные решения на воздействие по группе нарушителей в зоне ответственности каждого роботизированного комплекса, на основе вероятности поражения нарушителя, времени его поражения и количества затрачиваемых боеприпасов для поражения нарушителя, анализируют и оценивают состояние и параметры подсистемы управления и системы в целом при внешнем воздействии, при необходимости включают режим адаптации, оценивают индивидуальную боевую эффективность; в подсистеме управления второго уровня оценивают индивидуальные рациональные решения, адресно назначают роботизированные комплексы на поражение нарушителя, согласно списку приоритетности цели, незадействованные роботизированные комплексы назначают для рекогносцировки и корректировки воздействия по нарушителю, при появлении нескольких нарушителей перераспределяют роботизированные комплексы согласно боевой эффективности и индивидуальному рациональному решению, формируют адресные команды управления, оценивают боевую эффективность для группы роботизированных комплексов, сохраняют в базе знаний модели воздействия нарушителей, сведения об обстановке, модели воздействия и боевую эффективность каждого роботизированного комплекса, алгоритмы работы каждой подсистемы управления.
2. Система адаптивного группового управления роботизированными комплексами, содержащая в своем составе подсистемы управления первого, второго и третьего уровней управления, компьютерные линии, образующие распределенную, самоорганизующуюся мультиагентную систему связи и передачи данных, адресные каналы управления, при этом, в структуру подсистемы управления первого уровня входят: пульт ввода данных, блок формирования цели, динамическая система, блок управления, база данных, база знаний, контур адаптации, устройство приема-передачи, при этом, первый выход пульта ввода данных подсистемы управления первого уровня соединен с первым входом блока формирования цели, а второй - с входом блока базы данных, первый выход которого соединен с входами базы данных подсистем управления второго и третьего уровней, первый выход блока формирования цели соединен с входом блока базы знаний, первый выход блока базы знаний соединен с первым входом блока управления, выход которого соединен с входом устройства приема-передачи, выход которого - с входом устройства приема-передачи подсистемы управления второго уровня - ведущего роботизированного комплекса, второй выход блока формирования цели соединен с первым входом динамической системы, второй вход - с вторым выходом блока базы знаний, а третий - с вторым выходом блока базы данных, выход динамической системы соединен с вторым входом блока управления, выход и вход контура адаптации соединен с входом и выходом подсистемы управления первого уровня соответственно, выход устройства приема-передачи соединен с входами устройств приема-передачи подсистем управления второго и третьего уровней; в состав подсистемы управления второго уровня входят: устройство приема-передачи, программно-аппаратный модуль, состоящий из: блока сбора и обработки информации, в состав которого входят: датчики и блок базы данных, устройство выработки решений, в состав которого входят блок базы знаний, блок адресного управления, контур адаптации, исполнительное устройство, при этом, выход устройства приема-передачи подсистемы управления второго уровня - с входом блока сбора и обработки информации программно-аппаратного комплекса подсистемы управления второго уровня, вход блока базы данных подсистемы управления второго уровня соединен с выходами блоков базы данных подсистем управления первого и третьего уровней, выход датчиков - с входом блока сбора и обработки информации, выход которого - с первым входом устройства выработки решения, а второй вход - с выходом блока базы знаний, первый выход блока адресного управления - с входом исполнительного устройства, выход которого - с входом блока базы знаний, второй выход блока адресного управления подсистемы управления второго уровня - со вторым входом блока адресного управления подсистемы управления третьего уровня, выход и вход контура адаптации соединен с входом и выходом подсистемы управления второго уровня соответственно; в состав подсистемы управления третьего уровня входят: устройство приема-передачи, программно-аппаратный модуль, состоящий из: блока сбора и обработки информации, в состав которого входят: датчики и блок базы данных, устройство выработки решений, в состав которого входят блок базы знаний, блок адресного управления, контур адаптации, исполнительное устройство, при этом, выход устройства приема-передачи подсистемы управления третьего уровня соединен с первым входом блока сбора и обработки информации подсистемы управления третьего уровня, второй вход блока сбора и обработки информации - с выходом блока базы данных, третий вход - с выходом датчиков, выход блока сбора и обработки информации - с первым входом устройства выработки решения, второй вход устройства выработки решения - с выходом блока базы знаний, выход устройства выработки решения соединен со вторым входом блока адресного управления, выход которого - с входом исполнительного устройства, выход которого - с входом блока базы знаний, выход и вход контура адаптации соединен с входом и выходом подсистемы управления третьего уровня соответственно; количество подсистем управления третьего уровня определяется количеством роботизированных комплексов, при этом адресные входы-выходы каналообразующей аппаратуры данных и связи подсистемы управления первого уровня, подсистемы управления второго и каждого третьего уровней соединены между собой, а адресные входы-выходы каналообразующей аппаратуры адресного управления подсистемы второго уровня соединены с каждой адресной подсистемой управления третьих уровней между собой.
| Способ двухуровневого управления (варианты) | 2018 |
|
RU2679704C1 |
| СПОСОБ ТРЕХУРОВНЕВОГО УПРАВЛЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2546567C1 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| US 20190033888 A1, 31.01.2019 | |||
| DE 102015104104 A1, 01.10.2015. | |||

