ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области часовой техники, к часовым механизмам, а, более конкретно, к часовым механизмам усложненного типа с дополнительными функциями индикации на часах расстояния от Земли до Марса.
Уровень техники.
Известно, что пилотируемый полет на Марс - это запланированный полет человека на Марс с помощью пилотируемого космического корабля. Роскосмос, Национальное управление по аэронавтике и исследованию космического пространства (НАСА) и Европейское космическое агентство (ЕКА) объявили полет на Марс своей целью в XXI веке.
Исследование Марса, а также полет на Марс являются одной из важнейших целей человечества, направленных на обеспечение выживания человека как вида.
Вычисление и определение расстояния между планетами является одним из важнейших элементов в работе всех марсианских программ.
В среднем расстояние между Землей и Марсом составляет порядка 225 миллионов километров, но на самом деле оно постоянно меняется по мере того, как планеты вращаются вокруг Солнца. В теории их максимальное сближение происходит тогда, когда Земля находится в наиболее удаленной от Солнца точке орбиты (афелий), а Марс - в ближайшей к Солнцу точке орбиты (перигелий). В таком положении планеты будут находиться на расстоянии 54,6 миллионов километров друг от друга. Фактическое расстояние от Земли до Марса колеблется от 56 до 400 млн. километров, так как во время противостояний не происходит минимального сближения (см. фиг. 1).
Расстояние от Земли до Марса имеет огромное значение для выбора времени запуска марсианских миссий. Кроме того, при управлении марсоходами, также необходимо знать расстояние до планеты, поскольку происходит задержка сигналов управления планетоходами и необходимо знать время задержки, которая постоянно меняется.
Как указывалось ранее в патентом документе RU 2681297 С1, опубликованном 05.03.2019, приведенном здесь в качестве ссылки в полном объеме, наиболее удобное для полета на Марс время - это так называемое время противостояния Марса. Противостояние Марса - астрономическое определение, указывающее минимальное расстояние между Марсом и Землей. Так как Марс и Земля движутся по своим орбитам, имеющим различные размеры и параметры, противостояния Марса повторяются строго в определенных точках его орбиты и орбиты Земли.
Вблизи противостояний складываются наилучшие условия наблюдения планет:
 планеты находятся на наименьшем расстоянии от Земли (но за счет эллиптичности орбит значение минимального расстояния изменяется из года в год);
планеты находятся на наименьшем расстоянии от Земли (но за счет эллиптичности орбит значение минимального расстояния изменяется из года в год);
они обращены к Земле полушарием, освещенным Солнцем, то есть находятся в наибольшей фазе.
Если мы обратимся к источникам НАСА, то согласно NASA JPL Developement Ephemerides (DE430) мы получим график зависимости расстояния от времени, где на оси абсцисс указано количество дней, начиная с 1 января 2000 года, а по оси ординат - расстояние в километрах от Земли до Марса (см. график на фиг. 2).
На графике видно две зависимости:
- основные колебания, обусловленные изменением расстояния между планетами в результате их движения по орбитам, где видны сближения и отдаления; они имеют периодичность приблизительно 780 дней - это период противостояний.
- дополнительные колебания, которые выглядят как затухания и возрастания с периодичностью 15,8 лет. Это периодичность является периодом великих противостояний.
В момент Великого противостояния расстояние до планеты минимально по сравнению с другими противостояниями (различие возникает из-за эллиптичности орбит). В основном имеет значение при наблюдениях Марса. Великое противостояние возможно тогда, когда Марс находится в противостоянии с Землей и одновременно положение Марса наиболее близко к перигелию своей орбиты, по сравнению с другими противостояниями. Как правило, во время великого противостояния (то есть при совпадении противостояния с Землей и прохождения Марсом перигелия своей орбиты) оранжевый Марс является ярчайшим объектом земного ночного неба после Луны и Венеры, но это происходит лишь один раз в 15-17 лет в течение одной-двух недель. Великие противостояния Марса являются уникальными и важными астрономическими событиями так как позволяют наблюдать Марс с наименьшего расстояния (56-60 млн. км).
Таким образом, можно сделать вывод, что противостояние Марса и Земли имеет важнейшее значение для изучения Марса, и при перспективном развитии космонавтики, «окно» полета на Марс и с Марса обратно, возможно только во время ближайшего расположения этих планет.
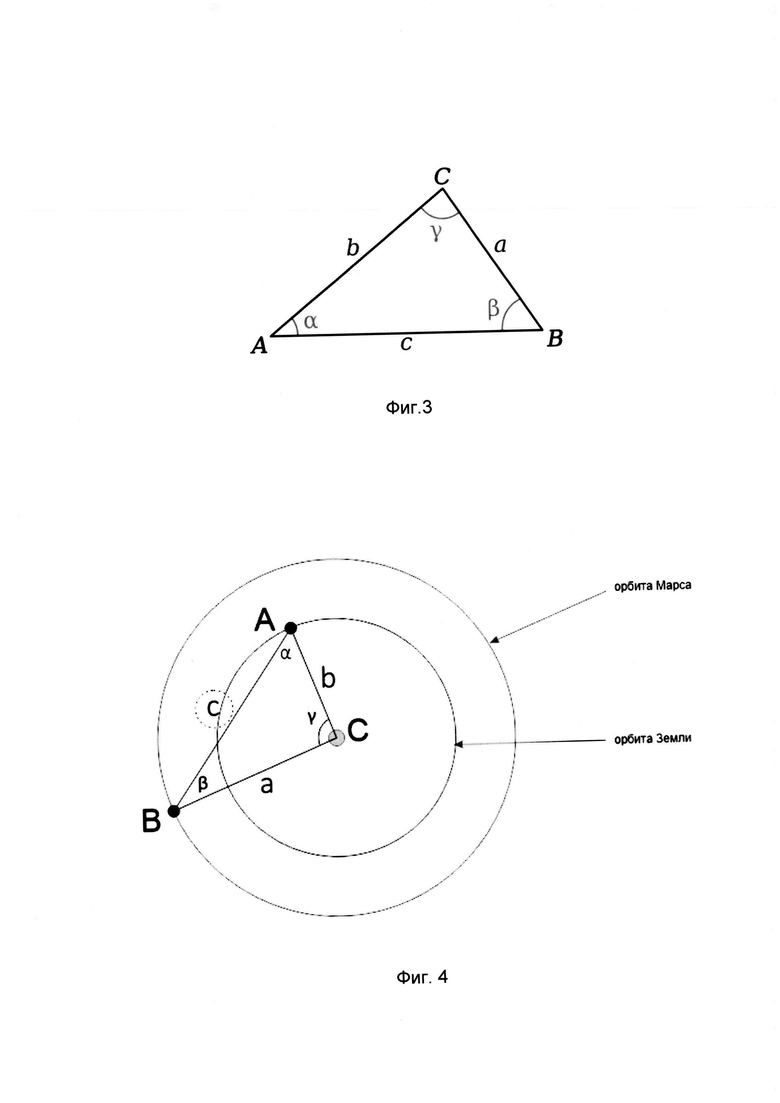
Близкий расчет расстояния между планетами можно получить используя теорему косинусов (см. фиг. 3).
Для плоского треугольника со сторонами а, b, с и углом γ, противолежащим стороне с, справедливо соотношение:

Представим себе систему планет Марс - Земля в виде треугольника, условно представив что орбиты являются круговыми и соосными, условный центр орбит обозначим как «С», положение Земли как «А», а положение Марса как «В». Тогда расстояние между планетами будет определяться стороной с, расстояние от цента до планеты Земля - стороной b, а расстояние от центра С до Марса -стороной а. Угол между сторонами а и b обозначим как γ. В этом случае искомое расстояние между Марсом и Землей возможно определить по теореме косинусов:

Но поскольку орбиты Марса и Земли имеют форму эллипса и имеют эксцентриситет, то по мере движения планет по орбитам расстояния от центра до планет не постоянны.
С учетом этого вычислим с помощью теоремы косинусов расстояния от Земли и Марса. При этом время представлено как независимый параметр для обеих планет и меняется просто как tn+1=t+1.
ЗЕМЛЯ (планета А)
Угол эксцентрической аномалии Е в градусах определяется как функция времени:

где μ - гравитационный параметр,
а - большая полуось орбиты Земли (планеты А)
Данные вычислений представлены в таблице 1 в столбце «Е градус» для планеты А.
При этом член  отброшен, так как дает вклад не более эксцентриситета е, который очень мал. Это позволило назначить единое для обеих планет время как независимый параметр из трансцендентного уравнения
отброшен, так как дает вклад не более эксцентриситета е, который очень мал. Это позволило назначить единое для обеих планет время как независимый параметр из трансцендентного уравнения

Угол истинной аномалии θ выражен в градусах и определяется как функция от эксцентрической аномалии и вычисляется по формуле:

Полученные значения представлены в таблице 1 в столбце «θ градус» для планеты А.
Воспользуемся уравнением эллипса в фокальной полярной системе координат.
Получим расстояние планеты Земля от Солнца в метрах:

где е - эксцентриситет орбиты
Полученные данные отображены в столбце RA в таблице 1.
МАРС (планета В)
Угол истинной аномалии θ выражен в градусах и определяется как функция от эксцентрической аномалии, определяемой по формуле:

Полученные значения представлены в таблице 1 в столбце «θ градус» для планеты В.
Расстояние от Солнца в метрах определяется по формуле:

Полученные данные заносим в таблицу 1 в столбец RB.
Расстояние между планетами Земля и Марс (на фигуре между А и В) определяем по формуле:

В качестве исходных данных и констант, которые используются в вышеуказанных формулах (3) - (6) мы используем:
Астрономическая единица 1 а.е.=149 597 870 691 м
Масса Солнца 
Гравитационная постоянная G=6,674184×10-11 м3⋅с-2⋅кг-1
Большая полуось орбиты Земли а=149 598 261 000 м
Эксцентриситет орбиты Земли е=0,01671022
Масса Земли m=5,9726⋅1024 кг
Большая полуось орбиты Марса а=227 943 820 000 м
Эксцентриситет орбиты Марса е=0,0933941
Масса Марса m=6,4171⋅1023 кг
И используя вышеуказанные формулы (3) - (6) мы получим данные, представленные в таблице 1.
На основании этих расчетов получены значения, максимально близкие к реальным данным, опубликованным и полученным НАСА.
На фиг. 5 представлен график полученной диаграммы расстояний, где по оси абсцисс отложено время в днях, а по оси ординат указаны расстояния в астрономических единицах. Полученные расчетные значения (график на фиг. 5) практически идентичны фактическим значениям, полученным НАСА (график на фиг. 2).
Очевидно, что для создания механического устройства индикации расстояния от Земли до Марса в реальном времени вышеприведенные вычисления сложны. В этой связи автором настоящего изобретения предложен иной алгоритм расчета расстояний, а также механические устройства, содержащие часовой механизм, посредством которых реализуется расчет расстояния от Земли до Марса в любой момент времени.
Задача и технический результат
В связи с тем, что в уровне техники не выявлены технические решения, подобные заявленному, задачей и техническим результатом изобретения является создание механического вычислителя расстояния между Землей и Марсом, устройства индикации расстояния между Землей и Марсом, а также приборов времени с указанными механизмами, которые обеспечивают индикацию расстояния от Земли до Марса в любой момент времени. Одновременно с этим заявленный прибор времени обеспечивает возможность его использования как на Земле, так и на Марсе.
Сущность изобретения Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что прибор времени включает корпус, циферблат, часовой механизм, стрелочный механизм, и дополнительно содержит вычислитель расстояния между Землей и Марсом, а также средство индикации расстояния между Землей и Марсом, выполненное в виде шкалы индикатора расстояния от Земли до Марса и указателя расстояния от Земли до Марса.
При этом вычислитель расстояния между Землей и Марсом кинематически связан с часовым механизмом.
Кроме этого вычислитель содержит
- редуктор годового периода Земли и редуктор годового периода Марса, причем кинематическое движение от часового механизма передается одновременно как редуктору годового периода Земли с одной стороны, так и редуктору годового периода Марса с другой стороны,
- в свою очередь редуктор годового периода Земли кинематически соединен с кулачком значения угла истинной аномалии Земли θА (1.1), а редуктор годового периода Марса кинематически соединен с кулачком значения угла истинной аномалии Марса θВ (1.8),
- оба кулачка значения 0А и θВ соединены с сумматором θВ - θA (1.2), который кинематически соединен с механизмом вычисления расстояния в случае концентрических орбит XAB,
- в то же время механизм вычисления расстояния в случае концентрических орбит ХАВ кинематически соединен с сумматором, определяющим итоговое фактическое расстояние между планетами Земля и Марс RΣ (1.7),
- при этом указанный сумматор RΣ (1.7) также кинематически взаимодействует с кулачком значения разницы между вычисленным расстоянием от Солнца до Марса и средним арифметическим полуосей RB-aB (1.9), который в свою очередь кинематически связан с редуктором годового периода Марса;
- итоговое фактическое расстояние между планетами Земля и Марс от сумматора RΣ (1.7) передается на средство индикации расстояния между Землей и Марсом.
В свою очередь, механизм вычисления расстояния в случае концентрических орбит ХАВ состоит из последовательно соединенных узлов - кулачка значений косинуса (1.3), узла двойного произведения среднего арифметического полуосей орбит Марса и Земли (1.4), узла значений суммы квадратов среднего арифметического полуосей орбит Марса и Земли (1.5) и кулачка значений квадратного корня (1.6).
При этом принцип работы механизма вычисления расстояния в случае концентрических орбит ХАВ выражается формулой 

В свою очередь профиль кулачка значений косинуса (1.3) построен по формуле γ=cosx, где х - значение угла кулачка в диапазоне от 0-360 градусов, а γ - радиус кулачка для каждого значения угла от 0 до 360 градусов.
Кроме этого при построении кулачка значений квадратного корня (1.6) диапазон значений задают от 7е+10 до 3,87е+11, причем полярному углу кулачка (1.6) задается известный диапазон значений на входе от 5е+21 до 1,5е+23, а полярному радиусу - значение корня от этого угла.
Также прибор времени дополнительно имеет усложнение часового механизма, позволяющего осуществлять индикацию земной даты и/или индикацию марсианской даты и/или марсианского времени.
Следует понимать, что в качестве приборов времени могут быть как переносные часы, хронометры, например, наручные, карманные, так и стационарные часы, например, настольные или напольные.
Кроме этого средство индикации расстояния от Земли до Марса может быть выполнено в виде подвижного диска с апертурой.
В тоже время в вариативном способе изготовления прибора времени, средство индикации расстояния от Земли до Марса может иметь нанесенные на шкалу метки или знаки.
Кроме этого, в случае выполнения многофункционального индикатора расстояния от Земли до Марса, он может быть выполнен таким образом, что подвижный элемент индикатора, шкала или указатель перемещаются в одну сторону плавно вокруг своей оси или скачкообразно.
Также следует понимать, что шкала может указывать расстояние в км или ае, то есть астрономических единицах.
При этом шкала может указывать расстояние во времени прохождения сигнала от Земли до Марса.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что прибор времени включает корпус, циферблат, часовой механизм, стрелочный механизм, и дополнительно содержит устройство индикации расстояния между Землей и Марсом, а также средство индикации расстояния между Землей и Марсом, выполненное в виде шкалы индикатора расстояния от Земли до Марса и указателя расстояния от Земли до Марса.
При этом устройство индикации расстояния между Землей и Марсом взаимодействует с часовым колесом стандартного часового механизма.
Кроме этого устройство индикации расстояния между Землей и Марсом содержит редуктор годового вращения Марса и редуктор годового вращения Земли, первый дифференциал, второй дифференциал, реверсивное годовое колесо Марса, передаточное колесо индикации, колесо указателя расстояния от Земли до Марса, при этом движение от часового механизма передается на редуктор годового вращения Марса и на редуктор годового вращения Земли.
В свою очередь редуктор годового вращения Марса состоит из кинематически взаимосвязанных зубчатых колес и трибов, причем передаточное отношение в редукторе годового вращения Марса составляет по меньшей мере 687,14.
При этом количество зубьев в зубчатых колесах редуктора годового вращения Марса имеют соотношение 
В свою очередь редуктор годового вращения Земли состоит из кинематически взаимосвязанных зубчатых колес и трибов, причем передаточное отношение в редукторе годового вращения Земли составляет по меньшей мере 365,23.
При этом количество зубьев в зубчатых колесах редуктора годового вращения Земли имеют соотношение 
Кроме этого первый дифференциал включает в себя водило первого дифференциала, первое центральное колесо первого дифференциала, второе центральное колесо первого дифференциала, первый сателлит и второй саттелит первого дифференциала.
Также второй дифференциал включает в себя водило второго дифференциала, первое центральное колесо второго дифференциала, второе центральное колесо второго дифференциала, первый сателлит второго дифференциала и второй сателлит второго дифференциала.
Кроме этого на оси зубчатого колеса редуктора годового вращения Марса расположен кулачок угла истинной аномалии Марса, по поверхности которого скользит щуп гребенки кулачка истинной аномалии Марса, зубчатая часть которого взаимодействует со вторым центральным колесом первого дифференциала.
При этом на оси зубчатого колеса редуктора годового вращения Земли расположен кулачок угла истинной аномалии Земли, по поверхности которого скользит щуп гребенки кулачка истинной аномалии Земли, зубчатая часть которого взаимодействует с первым центральным колесом первого дифференциала.
Также на валу водила первого дифференциала расположен кулачок значений косинуса.
При этом с поверхностью кулачка значений косинуса посредством зубьев и щупа гребенки кулачка значений косинуса взаимодействует кулачок значения корня, расположенный на трибе взаимодействующим с зубьями гребенки кулачка значения косинуса.
Кроме этого по поверхности кулачка значения корня скользит щуп гребенки кулачка значения корня зубчатая часть которого взаимодействует с первым центральным колесом второго дифференциала.
В свою очередь с колесом редуктора годового вращения Марса взаимодействует реверсивное годовое колесо Марса, совершающее один оборот за марсианский год.
Также на оси реверсивного годового колеса Марса расположен кулачок значений разницы между вычисленным расстоянием от Солнца до Марса и средним арифметическим полуосей RB-aB.
При этом водило второго дифференциала кинематически связано с передаточным колесом индикации.
Кроме этого передаточное колесо индикации кинематически связано с колесом указателя расстояния от Земли до Марса, на оси которого расположена стрелка-указатель.
Вариативно часовое колесо стандартного часового механизма делает один оборот за 12 часов.
Прибор времени может дополнительно иметь усложнение часового механизма, позволяющего осуществлять индикацию земной даты и/или индикацию марсианской даты и/или марсианского времени.
Следует понимать, что в качестве приборов времени могут быть переносные часы, хронометры, например, наручные, карманные, а также стационарные часы, например, настольные или напольные.
В варианте выполнения индикация расстояния от Земли до Марса может быть выполнена в виде подвижного диска с апертурой.
Кроме этого индикатор может иметь нанесенные на шкалу метки или знаки.
В то же время в случае выполнения многофункционального индикатора, он может быть выполнен таким образом, что подвижный элемент индикатора, шкала или указатель перемещаются в одну сторону плавно вокруг своей оси или скачкообразно.
Кроме этого шкала может указывать расстояние в км или ае, то есть в астрономических единицах.
Кроме этого шкала может указывать расстояние во времени прохождения сигнала от Земли до Марса.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что способ индикации расстояния между Землей и Марсом включает часовой механизм кинематически связанный с механизмом индикации расстояния между Землей и Марсом, а также средство индикации расстояния от Земли до Марса, выполненное в виде шкалы индикатора расстояния от Земли до Марса и указателя расстояния от Земли до Марса.
Кроме этого механизм индикации расстояния между Землей и Марсом содержит как редуктор годового периода Земли, так и редуктор годового периода Марса, причем:
- редуктор годового периода Земли кинематически связывают с кулачком значения угла истинной аномалии Земли θА (1.1), а редуктор годового периода Марса кинематически связывают с кулачком значения угла истинной аномалии Марса θВ (1.8),
- далее указанные механизмы соединяют с механизмом вычисления расстояния в случае концентрических орбит XAB, который в свою очередь кинематически соединяют с сумматором, определяющим итоговое фактическое расстояние между планетами Земля и Марс RΣ (1.7), причем указанный сумматор RΣ (1.7) также кинематически взаимодействует с кулачком значения разницы между вычисленным расстоянием от Солнца до Марса и средним арифметическим полуосей RB-aB (1.9), который в свою очередь кинематически связан с редуктором годового периода Марса;
- итоговое фактическое расстояние между планетами Земля и Марс от сумматора RΣ (1.7) передается на средство индикации расстояния между Землей и Марсом.
Краткое описание чертежей
Конструктивно в предпочтительном, но не единственно обязательном, варианте исполнения заявляемый механический вычислитель расстояния между Землей и Марсом, а также прибор времени с индикатором расстояния от Земли до Марса включает следующие детали:
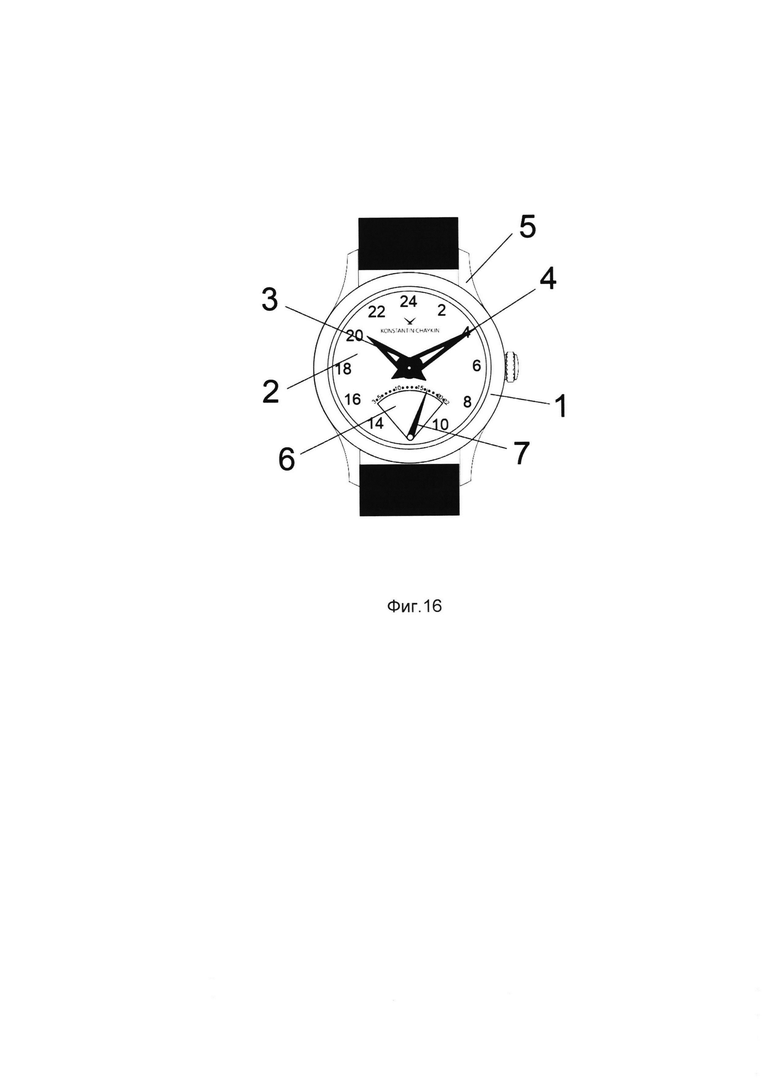
1 - Корпус
2 - Циферблат
3 - Часовая стрелка
4 - Минутная стрелка
5 - Ремешок
6 - Шкала индикатора расстояния от Земли до Марса
7 - Указатель расстояния от Земли до Марса.
8 - Первое колесо редуктора Земли.
9 - Первый триб редуктора Земли.
10 - Второе колесо редуктора Земли
11 - Второй триб редуктора Земли.
12 - Третье колесо редуктора Земли.
13 - Третий триб редуктора Земли.
14 - Четвертое колесо редуктора Земли
15 - Четвертый триб редуктора Земли.
16 - Пятое колесо редуктора Земли.
17 - Пятый триб редуктора Земли.
18 - Шестое колесо редуктора Земли
19 - Кулачек угла истинной аномалии Земли
20 - Гребенка кулачка угла истинной аномалии Земли
21 - Палец гребенки кулачка угла истинной аномалии Земли
22 - Зубья гребенки кулачка угла истинной аномалии Земли
23 - Передаточное колесо первого дифференциала
24 - Кулачек значений косинуса
25 - Первый сателлит первого дифференциала
26 - Гребенка кулачка значений косинуса
27. Щуп гребенки кулачка значения косинуса
28 - Зубья гребенки кулачка значения косинуса
29 - Кулачек значения корня.
30 - Гребенка кулачка значения корня.
31 - Щуп гребенки кулачка значения корня
32 - Зубчатая часть гребенки кулачка значения корня.
33 - Водило второго дифференциала
34 - Первое центральное колесо второго дифференциала
35 - Триб передаточного колеса индикации
36 - Передаточное колесо индикации
37 - Колесо указателя расстояния от Земли до Марса
38 - Первое колесо редуктора Марса
39 - Первый триб редуктора Марса
40 - Второе колесо редуктора Марса
41 - Второй триб редуктора Марса
42 - Третье колесо редуктора Марса
43 - Третий триб редуктора Марса
44 - Четвертое колесо редуктора Марса.
45 - Кулачек угла истинной аномалии Марса
46 - Щуп гребенки кулачка угла истинной аномалии Марса
47 - Гребенка кулачка угла истинной аномалии Марса
48 - Зубья гребенки кулачка угла истинной аномалии Марса
49 - Кулачек значений RB - aB
50 - Зубчатая часть гребенки кулачка значений RB - aB
51 - Щуп гребенки кулачка значений RB - aB
52 - Гребенка кулачка значений RB - aB
53 - Часовое колесо
54 - Первый сателлит второго дифференциала
55 - Триб кулачка значения корня
56 - Водило первого дифференциала
57 - Второй сателлит второго дифференциала
58 - Второе центральное колесо второго дифференциала
59 - Второй сателлит первого дифференциала
60 - Второе центральное колесо первого дифференциала.
61 - Первое центральное колесо первого дифференциала.
62 - Реверсивное годовое колесо Марса
В табл. 1 представлены расчетные значения угла истинной аномалии для Земли и Марса, угла эксцентрической аномалии для Земли и Марса, расстояние между планетами полученные при использовании формул (3)-(6).
В табл. 2 представлены расчетные значения угла истинной аномалии для Земли и Марса, угла эксцентрической аномалии для Земли и Марса, расстояние между планетами полученные при использовании формул (3)-(6) в сравнении с данными, полученными при помощи авторского метода расчета расстояний между планетами.
На фиг. 1 изображены орбиты Земли и Марса относительно Солнца.
На фиг. 2 приведен график зависимости расстояния между Землей и Марсом от времени по фактическим данным НАСА (DE430).
На фиг. 3 представлено стандартное обозначение углов и сторон в треугольнике.
На фиг. 4 изображены концентрические коаксиальные орбиты Земли и Марса и построенный треугольник Земля, Марс и Солнце.
На фиг. 5 приведен график зависимости расстояния между Землей и Марсом от времени по расчетным значениям.
На фиг. 6 приведен график зависимости расстояния между Землей и Марсом от времени по расчетным значениям, полученным по формулам автора.
На фиг. 7 приведен упрощенный график зависимости расстояния между Землей и Марсом от времени по расчетным значениям, полученным по формулам автора, с минимальными погрешностями.
На фиг. 8 приведен график погрешностей полученных предложенным методом значений расстояний от фактически полученных по данным НАСА.
На фиг. 9 представлена блок схема прибора времени с вычислителем, который обеспечивает механическое вычисление расстояние между Землей и Марсом.
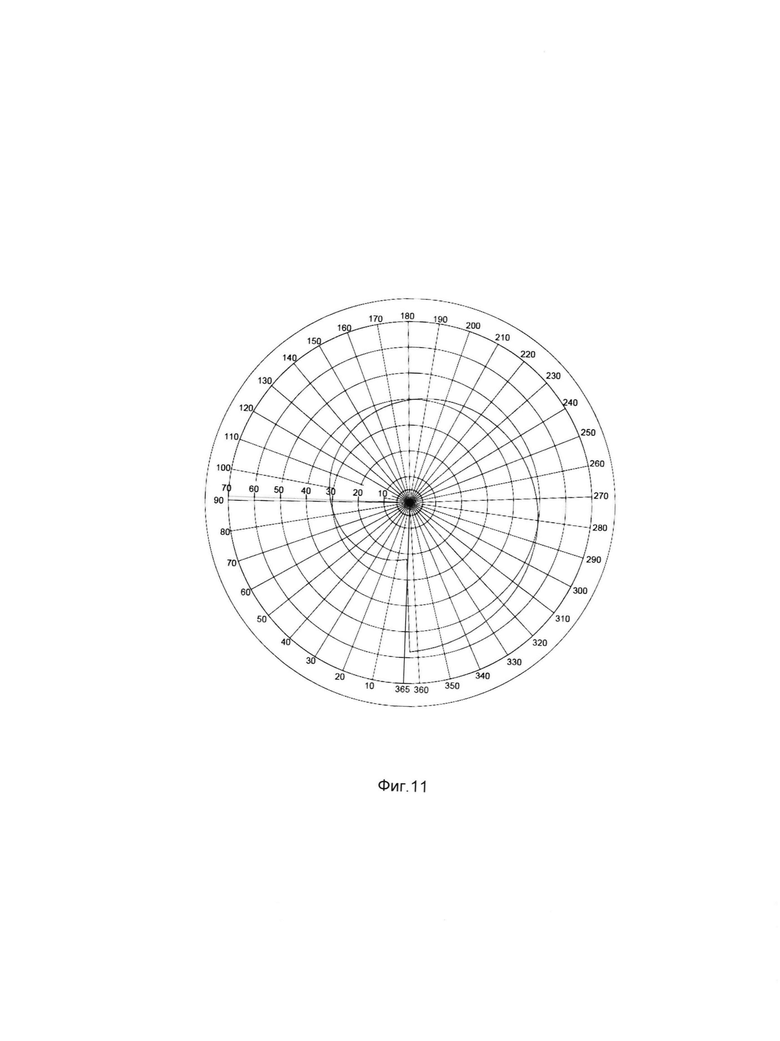
На фиг. 10 изображен кулачек угла истинной аномалии Марса.
На фиг. 11 изображен кулачек угла истинной аномалии Земли.
На фиг. 12 представлен механизм часов с устройством индикации расстояния от Земли до Марса.
На фиг. 13 представлен увеличенный фрагмент механизма часов с устройством индикации расстояния от Земли до Марса, представленного на фиг. 12.
На фиг. 14 представлен вид сзади части механизма, представленного на фиг. 12
На фиг. 15 изображена перспектива части механизма, отображенного на фиг. 12.
На фиг. 16 представлен внешний вид наручных часов с заявленным устройством индикации расстояния от Земли до Марса.
Осуществление изобретения
Как отмечалось выше, заявитель разработал приборы времени, которые содержат механизмы вычисления и отображения расстояния между Землей и Марсом, и способ, позволяющий обеспечить изготовление приборов времени, выполненных с возможностью индикации расстояния между Землей и Марсом. При этом на Земле указанные часы могут быть как в механическом, так и кварцевом исполнении. При этом в качестве основы для таких часов может быть взят любой стандартно выпускаемый часовой механизм. То есть базовый часовой механизм и стрелочная система могут быть практически любыми из числа известных и применяемых в часовой технике при выполнении ими их обычных для часов функций. Кроме этого часовой механизм может быть выполнен как для 12-ти часовой индикации, так и для 24-ти часовой индикации.
Для обеспечения возможности механической реализации заявленного устройства, автором был предложен новый алгоритм расчета расстояний. Это связано с тем, чтобы максимально просто реализовать устройство вычисления расстояния с помощью механических средств. Для этого необходимо найти и обеспечить строгую цикличность или постоянство определенных входных данных, и обеспечить возможность механического вычисления известными механическими средствами, преимущественно простыми устройствами.
Суть предложенной новой формулы расчета основана на замене вычисления расстояний планет, имеющих эксцентричные эллиптические орбиты на концентрические круговые орбиты, при этом учитывая изменения скорости движения по орбитам, с последующим добавлением к полученному расстоянию величины отклонения эллиптической орбиты от круговой.
Предложенная заявителем формула расчета расстояний между планетами Земля и Марс имеет вид:

где XAB - это расстояние между планетами А и В в случае концентрических круговых орбит, но имеющих непостоянную скорость движения по орбите,
RA - аА - представляет собой разницу между вычисленным расстоянием от Солнца до планеты Земля и средним арифметическим полуосей и имеют периоды равные земному году,
RB - aB - представляет собой разницу между вычисленным расстоянием от Солнца до планеты Марс и средним арифметическим полуосей и имеют периоды равные марсианскому году.
Расстояние в случае концентрических орбит определяется по формуле:

где аА и aB - это среднее арифметическое полуосей.
Полученные данные представлены в таблице 2.
По значениям, представленным в таблице 2 можно построить график значений RA - аА, RB - aB и ХАВ (см. фиг. 6). На графике, представленном на фиг. 6 римскими цифрами обозначены:
I - график, полученный согласно значениям ХАВ
II - график, полученный согласно значениям RB - aB
III - график, полученный согласно значениям RA - аА
Из вышеуказанного графика, представленного на фиг. 6 видно, что значения RA - аА, вносимые Землей имеют очень небольшое влияние на результат, и поскольку орбита Марса имеет в шесть раз больший эксцентриситет чем орбита Земли, то следовательно возможно пренебречь влиянием эксцентриситета Земли, что сильно упрощает результирующий механизм, основанный на представленных расчетах. В частности, в одном из вариантов расчетов предложено исключить значение RA - аА из расчета расстояния между Землей и Марсом для упрощения заявляемой конструкции механизма индикации расстояния между Землей и Марсом.
В этом случае, формула (7) будет выглядеть следующим образом:

В таблице 2 в колонке «Значение, упрощенное по формуле автора» представлены полученные данные.
По этим данным построим график (фиг. 7). На графике представлены диаграммы расстояний. По оси абсцисс указано время в днях, по оси ординат указано расстояние в астрономических единицах.
При сопоставлении полученного графика (фиг. 7) с графиком, полученным по фактическим данным НАСА (фиг. 2) получаем минимальное значение погрешности, которая графически отображена на фиг. 8. На полученном графике на фиг. 8 видно, что максимальная полученная погрешность составляет приблизительно 0,05 АЕ, что составляет порядка 2% от максимально возможного расстояния и на период времени больше чем 50 лет и достаточно точно для выполнения на шкале любых механических приборов, в том числе и на шкале приборов времени.
Как следует из вышеизложенного, автором настоящего изобретения предложен простой вариант устройства, позволяющего осуществлять индикацию расстояния между Землей и Марсом. Поскольку орбита Марса имеет в шесть раз больший эксцентриситет, чем орбита Земли, то существует возможность пренебречь влиянием эксцентриситета Земли при произведении расчетов, что в конечном итоге сильно упрощает как изготовление механизма индикации расстояния между планетами, так и его конструкцию в целом.
Таким образом, настоящее изобретение основано на вычислении итогового расстояния между Землей и Марсом по формуле (9).
Блок схема варианта заявленного устройства представлена на фиг. 9. Как следует из представленной блок схемы, заявленное изобретение основано на механизме, который является по существу механическим вычислителем, обеспечивающем механическое вычисление расстояния между Землей и Марсом в реальном времени.
Кулачок значения θА и кулачок значения θВ построены на основании значений, представленных в соответствующих столбцах в таблице 1. Схематическое изображение полученных кулачков значения θА (для Земли) и значения θВ (для Марса) приведены на фиг. 10 и фиг. 11.
Кулачок значений косинуса, кулачок значений RB - aB и кулачок значений корня на чертежах не представлены.
При этом кулачок значений косинуса обозначен позицией 3 на фиг. 9. Кулачек значений косинуса поворачивается на определенный угол (в диапазоне от 0 до 360 градусов), и за счет разных высот профиля своей поверхности поднимает щуп 27 гребенки 26 на фиг. 12 на определенную высоту. Поверхность кулачка рассчитана и построена таким образом, что перепад высот поверхности кулачка по всей длине его окружности прямо пропорциональна косинусу угловых значений его окружности. Профиль кулачка построен по формуле γ=cosx, где х - значение угла кулачка в диапазоне от 0-360 градусов, а γ - радиус кулачка для каждого значения угла от 0 до 360 градусов. Этот кулачек используется для получения значений cos 
Для построения кулачка значений RB - aB используем соответствующие данные, представленные в таблице 2.
В свою очередь при построении кулачка значений корня диапазон значений задают от 7е+10 до 3,87е+11. Цель данного кулачка заключается в том, что полярному углу кулачка задаются известный диапазон значений на входе от 5е+21 до 1,5е+23, а полярному радиусу - значение корня от этого угла. Таким образом кулачок на входе совершает поворот, и щуп в зависимости от угла поворота снимает значение квадратного корня от входящего значения угла.
Сам механизм устройства индикации расстояния между Землей и Марсом представлен на фиг. 12. На фигуре 13 представлен вид сзади части механизма устройства индикации расстояния между Землей и Марсом, приведенного на фиг. 12. А на фигуре 14 представлен вид в перспективе части механизма устройства индикации расстояния между Землей и Марсом, приведенного на фиг. 12.
Как показано на фиг. 12 и фиг. 13 от часового колеса 53 стандартного часового механизма, которое делает один оборот за 12 часов, вращение передается по двум направлениям.
В одном направлении движение передается на редуктор годового вращения Марса. Редуктор годового вращения Марса состоит из колес и трибов, обозначенных на фигуре 12 позициями 38-44, где первое колесо редуктора Марса 38 кинематически соединено посредством первого триба редуктора Марса 39 со вторым колесом редуктора Марса 40, которое в свою очередь посредством второго триба редуктора Марса 41 кинематически соединено с третьим колесом редуктора Марса 42, далее посредством третьего триба редуктора Марса 43 кинематически соединено с четвертым колесом редуктора Марса 44.
Передаточное отношение в редукторе годового вращения Марса в нашем примере составляет 687,14 и имеет следующее количество зубьев колес:

От часового колеса 53 движение передается на первое колесо редуктора Марса 38, которое совершает один оборот за сутки, на котором жестко установлен первый триб редуктора Марса 39, который передает движение на второе колесо редуктора Марса 40, на котором жестко установлен второй триб редуктора Марса 41. Движение от второго триба редуктора Марса 41 передается на третье колесо редуктора Марса 42, на котором распложен третий триб редуктора Марса 43. От третьего триба редуктора Марса 43 движение передается на четвертое колесо редуктора Марса 44. Четвертое колесо редуктора Марса 44 совершает один оборот за один марсианский год (687 дней).
На оси четвертого колеса редуктора Марса 44 расположен кулачек угла истинной аномалии Марса 45.
По поверхности кулачка угла истинной аномалии Марса 45 скользит щуп 46 гребенки 47 кулачка угла истинной аномалии Марса. Зубчатая часть 48 гребенки 47 кулачка угла истинной аномалии Марса 45 взаимодействует со вторым центральным колесом 60 первого дифференциала и поворачивает указанное второе центральное колесо 60 первого дифференциала.
В другом направлении от часового колеса 53 движение передается на редуктор годового вращения Земли. Редуктор годового вращения Земли состоит из колес и трибов, обозначенных на фигуре 12 позициями 8 - 18, где первое колесо редуктора Земли 8 кинематически соединено посредством первого триба редуктора Земли 9 со вторым колесом редуктора Земли 10, которое в свою очередь посредством второго триба редуктора Земли 11 кинематически соединено с третьим колесом редуктора Земли 12, далее посредством третьего триба редуктора Земли 13 кинематически соединено с четвертым колесом редуктора Земли 14, далее посредством четвертого триба редуктора Земли 15 кинематически соединено с пятым колесом редуктора Земли 16, далее посредством пятого триба редуктора Земли 17 кинематически соединено с шестым колесом редуктора Земли 18. Передаточное отношение редуктора годового вращения Земли в нашем примере 365,23 и имеет следующее количество зубьев колес:

От часового колеса 53 движение передается на первое колесо редуктора Земли 8, которое совершает один оборот за сутки, на котором жестко установлен первый триб редуктора Земли 9, который передает движение на второе колесо редуктора Земли 10, на котором жестко установлен второй триб редуктора Земли 11. Движение от второго триба редуктора Земли 11 передается на третье колесо редуктора Земли 12, на котором распложен третий триб редуктора Земли 13. От третьего триба редуктора Земли 13 движение передается на четвертое колесо редуктора Земли 14, на котором расположен четвертый триб редуктора Земли 15. От четвертого триба редуктора Земли 15 движение передается на пятое колесо редуктора Земли 16, на котором расположен пятый триб редуктора Земли 17, от которого движение передается на шестое колесо редуктора Земли 18. Шестое колесо редуктора Земли совершает один оборот за один земной год (365,23 дней).
На оси шестого колеса редуктора Земли 18 расположен кулачек угла истинной аномалии Земли 19.
По поверхности кулачка угла истинной аномалии Земли 19 скользит палец 21 гребенки 20 кулачка угла истинной аномалии Земли 19. Зубчатая часть 22 гребенки 20 кулачка угла истинной аномалии Земли 19 взаимодействует с передаточным колесом первого дифференциала 23. А передаточное колесо первого дифференциала 23 поворачивает первое центральное колесо 61 первого дифференциала.
Первый дифференциал включает в себя водило 56 первого дифференциала, первое центральное колесо 61 первого дифференциала, второе центральное колесо 60 первого дифференциала, второй сателлит 59 первого дифференциала и первый сателлит 25 первого дифференциала.
На водиле 56 первого дифференциала получается результирующее значение скоростей, получаемых от кулачка угла истинной аномалии Земли 19 и кулачка угла истинной аномалии Марса 45. Углы поворота, количество зубьев и передаточные отношения от гребенки кулачка угла истинной аномалии Земли 20 и от гребенки кулачка угла истинной аномалии Марса 47 до водила 56 первого дифференциала рассчитаны таким образом, чтобы при максимальном подъеме гребенок 20 и 47 будет максимальный угол поворота водила в 720 градусов.
На валу водила 56 первого дифференциала расположен кулачек значения косинуса 24.
С поверхностью кулачка значения косинуса 24 взаимодействует щуп 27 гребенки 26 кулачка значения косинуса. Зубья гребенки 28 кулачка значения косинуса взаимодействуют с трибом 55 кулачка значения корня 29.
По поверхности кулачка значения корня 29 скользит щуп 31 гребенки 30 кулачка значения корня. Зубчатая часть 32 гребенки 30 кулачка значения корня передает движение на первое центральное колесо второго дифференциала 34.
С четверным колесом редуктора Марса 44 взаимодействует реверсивное годовое колесо Марса 62, совершающее один оборот за марсианский год. На оси этого реверсивного годового колеса Марса 62 расположен кулачек значений RB - aB 49. По поверхности кулачка значений RB - aB 49 скользит щуп 51 гребенки 52 кулачка значений RB - aB 49. Зубчатая часть 50 гребенки 52 кулачка значений RB - aB поворачивает второе центральное колесо второго дифференциала 58.
Второй дифференциал включает в себя водило 33 второго дифференциала, первое центральное колесо второго дифференциала 34, второе центральное колесо второго дифференциала 58, первый сателлит второго дифференциала 54 и второй сателлит второго дифференциала 57. На водиле 33 второго дифференциала получается результирующее значение скоростей, получаемых от кулачка значения корня 29 и от кулачка значений RB - aB 49.
От водила второго дифференциала 33 движение передается на передаточное колесо индикации 36. На оси передаточного колеса индикации 36 установлен триб передаточного колеса индикации 35, который передает движение на колесо указателя расстояния от Земли до Марса 37, на оси которого расположена стрелка-указатель 7, показывающая на шкале индикатора 6 расстояние от Земли до Марса.
Углы поворота, количество зубьев и передаточные отношения от гребенки кулачка значения корня 30 и гребенки кулачка значений RB - aB 52 до водила второго дифференциала 33, а также до колеса указателя расстояния от Земли до Марса 37 рассчитаны таким образом, чтобы при минимальном и максимальном подъеме гребенок обеспечивать полный поворот указателя расстояния от Земли до Марса 7 по шкале индикатора расстояния от Земли до Марса 6.
На фигурах 12-14 отсутствуют пружины прижима гребенок к кулачкам для облегчения понимания работы устройства, но при необходимости они могут быть установлены.
При необходимости заявленный механизм может иметь дополнительный индикатор земной даты и/или марсианской даты.
Также индикация расстояния от Земли до Марса может быть выполнена в виде подвижного диска с апертурой.
Индикатор может иметь нанесенные на шкалу метки или знаки.
На шкале могут быть отмечены порядковые номера дат или порядковые номера месяцев, как чередующиеся друг за другом, так и нанесенные через заданный промежуток.
В случае выполнения многофункционального индикатора, он может быть выполнен таким образом, что подвижный элемент индикатора, шкала или указатель перемещаются в одну сторону плавно вокруг своей оси или скачкообразно.
Таким образом посредством механизма часов с индикатором расстояния от Земли до Марса без дополнительного усложнения часового механизма будет обеспечена высокая точность индикации расстояния от Земли до Марса за счет построения механического вычислителя, позволяющего обеспечивать механическое вычисление расстояния межу Землей и Марсом в режиме реального времени с минимальной погрешностью.
Таким образом обеспечивается достижение требуемого технического результата, а именно создание механического вычислителя, который обеспечивает механическое вычисление расстояния от Земли до Марса с минимальной погрешностью и создание прибора времени, который обеспечивает индикацию расстояния от Земли до Марса, а также при необходимости индикацию земной даты и/или индикацию марсианской даты. Одновременно с этим заявленный прибор времени можно использовать как на Земле, так и на Марсе.
Учитывая новизну совокупности существенных признаков, техническое решение поставленной задачи, изобретательский уровень и существенность всех общих и частных признаков изобретения, доказанных в разделе «Уровень техники» и «Раскрытие изобретения», доказанную в разделе «Осуществление и промышленная реализация изобретения» техническую осуществимость и промышленную применимость изобретения, решение поставленных изобретательских задач и уверенное достижение требуемого технического результата при реализации и использовании изобретения, по нашему мнению, заявленная группа изобретений удовлетворяет всем требованиям патентоспособности, предъявляемым к изобретениям.
Проведенный анализ показывает также, что все общие и частные признаки изобретения являются существенными, так как каждый из них необходим, а все вместе они не только достаточны для достижения цели изобретения, но и позволяют реализовать изобретение промышленным способом.










Использование: изобретение относится к области часовой техники, к часовым механизмам, а более конкретно к часовым механизмам усложненного типа с дополнительными функциями индикации на часах расстояния между Землей и Марсом. Сущность: прибор времени, включающий корпус, циферблат, часовой механизм, стрелочный механизм, при этом дополнительно содержит вариативно либо вычислитель расстояния между Землей и Марсом, либо устройство индикации расстояния между Землей и Марсом, а также средство индикации расстояния между Землей и Марсом, выполненное в виде шкалы индикатора расстояния от Земли до Марса и указателя расстояния от Земли до Марса. Технический результат: создание механического вычислителя расстояния между Землей и Марсом, устройства индикации расстояния между Землей и Марсом, а также приборов времени с указанными механизмами, которые обеспечивают индикацию расстояния от Земли до Марса в любой момент времени. Одновременно с этим заявленный прибор времени обеспечивает возможность его использования как на Земле, так и на Марсе. 3 н. и 37 з.п. ф-лы, 16 ил., 2 табл.
1. Прибор времени, включающий корпус, циферблат, часовой механизм, стрелочный механизм, отличающийся тем, что дополнительно содержит вычислитель расстояния между Землей и Марсом, а также средство индикации расстояния между Землей и Марсом, выполненное в виде шкалы индикатора расстояния от Земли до Марса и указателя расстояния от Земли до Марса, при этом вычислитель содержит
- редуктор годового периода Земли и редуктор годового периода Марса, причем кинематическое движение от часового механизма передается одновременно как редуктору годового периода Земли с одной стороны, так и редуктору годового периода Марса с другой стороны,
- в свою очередь редуктор годового периода Земли кинематически соединен с кулачком значения угла истинной аномалии Земли θА (1.1), а редуктор годового периода Марса кинематически соединен с кулачком значения угла истинной аномалии Марса θВ (1.8),
- оба кулачка значения 0А и 0в соединены с сумматором θВ-θА (1.2), который кинематически соединен с механизмом вычисления расстояния в случае концентрических орбит ХАВ,
- в то же время механизм вычисления расстояния в случае концентрических орбит ХАВ кинематически соединен с сумматором, определяющим итоговое фактическое расстояние между планетами Земля и Марс RΣ (1.7),
- при этом указанный сумматор RΣ (1.7) также кинематически взаимодействует с кулачком значения разницы между вычисленным расстоянием от Солнца до Марса и средним арифметическим полуосей RB-aB (1.9), который в свою очередь кинематически связан с редуктором годового периода Марса;
- итоговое фактическое расстояние между планетами Земля и Марс от сумматора RΣ (1.7) передается на средство индикации расстояния между Землей и Марсом.
2. Прибор времени по п. 1, отличающийся тем, что вычислитель расстояния между Землей и Марсом кинематически связан с часовым механизмом.
3. Прибор времени по п. 1, отличающийся тем, что механизм вычисления расстояния в случае концентрических орбит ХАВ состоит из последовательно соединенных узлов - кулачка значений косинуса (1.3), узла двойного произведения среднего арифметического полуосей орбит Марса и Земли (1.4), узла значений суммы квадратов среднего арифметического полуосей орбит Марса и Земли (1.5) и кулачка значений квадратного корня (1.6).
4. Прибор времени по пп. 1 и 3, отличающийся тем, что принцип работы механизма вычисления расстояния в случае концентрических орбит ХАВ выражается формулой ХАВ=
5. Прибор времени по п. 3, отличающийся тем, что профиль кулачка значений косинуса (1.3) построен по формуле γ=cosx, где х - значение угла кулачка в диапазоне от 0-360 градусов, а γ - радиус кулачка для каждого значения угла от 0 до 360 градусов.
6. Прибор времени по п. 3, отличающийся тем, что при построении кулачка значений квадратного корня (1.6) диапазон значений задают от 7е+10 до 3,87е+11, причем полярному углу кулачка (1.6) задается известный диапазон значений на входе от 5е+21 до 1,5е +23, а полярному радиусу - значение корня от этого угла.
7. Прибор времени по п. 1, отличающийся тем, что дополнительно имеет усложнение часового механизма, позволяющего осуществлять индикацию земной даты и/или индикацию марсианской даты и/или марсианского времени.
8. Прибор времени по п. 1, отличающийся тем, что в качестве приборов времени могут быть переносные часы, хронометры, например, наручные, карманные, а также стационарные часы, например, настольные или напольные.
9. Прибор времени по п. 1, отличающийся тем, что средство индикации расстояния от Земли до Марса может быть выполнено в виде подвижного диска с апертурой.
10. Прибор времени по п. 1, отличающийся тем, что средство индикации расстояния от Земли до Марса может иметь нанесенные на шкалу метки или знаки.
11. Прибор времени по п. 1, отличающийся тем, что в случае выполнения многофункционального индикатора расстояния от Земли до Марса он может быть выполнен таким образом, что подвижный элемент индикатора, шкала или указатель перемещаются в одну сторону плавно вокруг своей оси или скачкообразно.
12. Прибор времени по п. 1, отличающийся тем, что шкала может указывать расстояние в км или ае.
13. Прибор времени по п. 1, отличающийся тем, что шкала может указывать расстояние во времени прохождения сигнала от Земли до Марса.
14. Прибор времени, включающий корпус, циферблат, часовой механизм, стрелочный механизм, отличающийся тем, что дополнительно содержит устройство индикации расстояния между Землей и Марсом, а также средство индикации расстояния между Землей и Марсом, выполненное в виде шкалы индикатора расстояния от Земли до Марса и указателя расстояния от Земли до Марса, при этом устройство индикации расстояния между Землей и Марсом содержит редуктор годового вращения Марса и редуктор годового вращения Земли, первый дифференциал, второй дифференциал, реверсивное годовое колесо Марса, передаточное колесо индикации, колесо указателя расстояния от Земли до Марса, при этом движение от часового механизма передается на редуктор годового вращения Марса и на редуктор годового вращения Земли.
15. Прибор времени по п. 14, отличающийся тем, что устройство индикации расстояния между Землей и Марсом взаимодействует с часовым колесом стандартного часового механизма.
16. Прибор времени по п. 14, отличающийся тем, что редуктор годового вращения Марса состоит из кинематически взаимосвязанных зубчатых колес и трибов, причем передаточное отношение в редукторе годового вращения Марса составляет по меньшей мере 687,14.
17. Прибор времени по п. 16, отличающийся тем, что количество зубьев в зубчатых колесах редуктора годового вращения Марса имеют соотношение 
18. Прибор времени по п. 17, отличающийся тем, что редуктор годового вращения Земли состоит из кинематически взаимосвязанных зубчатых колес и трибов, причем передаточное отношение в редукторе годового вращения Земли составляет по меньшей мере 365,23.
19. Прибор времени по п. 18, отличающийся тем, что количество зубьев в зубчатых колесах редуктора годового вращения Земли имеют соотношение 
20. Прибор времени по п. 14, отличающийся тем, что первый дифференциал включает в себя водило первого дифференциала, первое центральное колесо первого дифференциала, второе центральное колесо первого дифференциала, первый сателлит и второй сателлит первого дифференциала.
21. Прибор времени по п. 14, отличающийся тем, что второй дифференциал включает в себя водило второго дифференциала, первое центральное колесо второго дифференциала, второе центральное колесо второго дифференциала, первый сателлит второго дифференциала и второй сателлит второго дифференциала.
22. Прибор времени по п. 14, отличающийся тем, что на оси зубчатого колеса редуктора годового вращения Марса расположен кулачок угла истинной аномалии Марса, по поверхности которого скользит щуп гребенки кулачка истинной аномалии Марса, зубчатая часть которого взаимодействует со вторым центральным колесом первого дифференциала.
23. Прибор времени по п. 14, отличающийся тем, что на оси зубчатого колеса редуктора годового вращения Земли расположен кулачок угла истинной аномалии Земли, по поверхности которого скользит щуп гребенки кулачка истинной аномалии Земли, зубчатая часть которого взаимодействует с первым центральным колесом первого дифференциала.
24. Прибор времени по п. 20, отличающийся тем, что на валу водила первого дифференциала расположен кулачок значений косинуса.
25. Прибор времени по п. 24, отличающийся тем, что с поверхностью кулачка значений косинуса посредством зубьев и щупа гребенки кулачка значений косинуса взаимодействует кулачок значения корня, расположенный на трибе взаимодействующим с зубьями гребенки кулачка значения косинуса.
26. Прибор времени по п. 25, отличающийся тем, что по поверхности кулачка значения корня скользит щуп гребенки кулачка значения корня, зубчатая часть которого взаимодействует с первым центральным колесом второго дифференциала.
27. Прибор времени по п. 14, отличающийся тем, что с колесом редуктора годового вращения Марса взаимодействует реверсивное годовое колесо Марса, совершающее один оборот за марсианский год.
28. Прибор времени по п. 27, отличающийся тем, что на оси реверсивного годового колеса Марса расположен кулачок значений разницы между вычисленным расстоянием от Солнца до Марса и средним арифметическим полуосей RB-aB.
29. Прибор времени по п. 21, отличающийся тем, что водило второго дифференциала кинематически связано с передаточным колесом индикации.
30. Прибор времени по п. 29, отличающийся тем, что передаточное колесо индикации кинематически связано с колесом указателя расстояния от Земли до Марса, на оси которого расположена стрелка-указатель.
31. Прибор времени по п. 14, отличающийся тем, что часовое колесо стандартного часового механизма делает один оборот за 12 часов.
32. Прибор времени по п. 14, отличающийся тем, что дополнительно имеет усложнение часового механизма, позволяющего осуществлять индикацию земной даты и/или индикацию марсианской даты и/или марсианского времени.
33. Прибор времени по п. 14, отличающийся тем, что в качестве приборов времени могут быть переносные часы, хронометры, например, наручные, карманные, а также стационарные часы, например, настольные или напольные.
34. Прибор времени по п. 14, отличающийся тем, что индикация расстояния от Земли до Марса может быть выполнена в виде подвижного диска с апертурой.
35. Прибор времени по п. 14, отличающийся тем, что индикатор может иметь нанесенные на шкалу метки или знаки.
36. Прибор времени по п. 14, отличающийся тем, что в случае выполнения многофункционального индикатора он может быть выполнен таким образом, что подвижный элемент индикатора, шкала или указатель перемещаются в одну сторону плавно вокруг своей оси или скачкообразно.
37. Прибор времени по п. 14, отличающийся тем, что шкала может указывать расстояние в км или ае.
38. Прибор времени по п. 14, отличающийся тем, что шкала может указывать расстояние во времени прохождения сигнала от Земли до Марса.
39. Способ вычисления и индикации расстояния между Землей и Марсом, включающий часовой механизм, кинематически связанный с механизмом индикации расстояния между Землей и Марсом, а также средство индикации расстояния от Земли до Марса, выполненное в виде шкалы индикатора расстояния от Земли до Марса и указателя расстояния от Земли до Марса.
40. Способ по п. 39, отличающийся тем, что механизм индикации расстояния между Землей и Марсом содержит как редуктор годового периода Земли, так и редуктор годового периода Марса, причем:
- редуктор годового периода Земли кинематически связывают с кулачком значения угла истинной аномалии Земли θА (1.1), а редуктор годового периода Марса кинематически связывают с кулачком значения угла истинной аномалии Марса θВ (1.8),
- далее указанные механизмы соединяют с механизмом вычисления расстояния в случае концентрических орбит ХАВ, который в свою очередь кинематически соединяют с сумматором, определяющим итоговое фактическое расстояние между планетами Земля и Марс RΣ (1.7), причем указанный сумматор RΣ (1.7) также кинематически взаимодействует с кулачком значения разницы между вычисленным расстоянием от Солнца до Марса и средним арифметическим полуосей RB-aB (1.9), который в свою очередь кинематически связан с редуктором годового периода Марса;
- итоговое фактическое расстояние между планетами Земля и Марс от сумматора RΣ (1.7) передается на средство индикации расстояния между Землей и Марсом.
| Прибор времени с многофункциональным механизмом индикации циклов противостояния Земли и Марса | 2018 |
|
RU2681297C1 |
| ЧАСЫ С ИНДИКАЦИЕЙ ВРЕМЕНИ НА МАРСЕ | 2017 |
|
RU2685764C1 |
| ПРИБОР ВРЕМЕНИ С ИНДИКАЦИЕЙ ПЕРИОДА ПРОТИВОСТОЯНИЯ МАРСА | 2017 |
|
RU2685766C1 |
| US 8995233 B2, 31.03.2015 | |||
| Устройство для управления питанием N-секционного электрофильтра | 1988 |
|
SU1570781A1 |

