ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка испрашивает преимущество и приоритет предварительной заявки на патент США № 62/522,740, поданной 21 июня 2017 г., включенной в настоящий документ во всей своей полноте посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] В операциях бурения нефтяных и газовых скважин обычно используется ряд методов измерения в процессе бурения (MWD, от англ. measurement while drilling) и каротажа в процессе бурения (LWD, от англ. logging while drilling) для сбора информации о скважине и пласте, в котором она пробурена. Методы MWD и LWD могут использоваться, например, для получения информации о скважине (например, информации о ее размере, форме и направлении) и окружающем пласте (например, скорости звука, плотности и удельном сопротивлении).
[0003] Передача данных (например, данных MWD и LWD) из скважинного инструмента на поверхность является сложным процессом, характерным для многих операций бурения. Могут использоваться различные методы телеметрии, например, включая телеметрию по гидроимпульсному каналу связи, электромагнитную телеметрию и акустическую телеметрию. Отчасти ввиду присущего для этого канала связи шуму операции внутрискважинной телеметрии имеют тенденцию к ошибкам и малой скорости (имея очень ограниченную полосу пропускания). Ввиду этих трудностей обычные операции телеметрии обычно предусматривают передачу предварительно сконфигурированных последовательностей данных.
[0004] Современные буровые инструменты генерируют большое количество данных датчиков, которые могут перегружать телеметрический канал. Выбор подходящей информации для передачи может включать оценку сложных взаимосвязей и зависимостей между различными наборами данных, условиями бурения и подземными пластами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Варианты реализации настоящего изобретения включают способ телеметрии для передачи данных из скважинного местоположения в наземное местоположение. Происходит обнаружение события, которое делает желательным изменение потока передаваемых данных в процессе бурения. Скважинный процессор обрабатывает обнаруженное событие в сочетании с предварительно определенной базой данных событий и данными измерений в скважине, используя алгоритм построения кадра для вычисления потока цифровых данных. Маркеры синхронизации добавляются в поток данных для получения синхронизированного потока данных, в котором маркеры синхронизации идентифицируют обнаруженное событие. Синхронизированный поток данных передается в местоположение на поверхности с использованием скважинного телеметрического инструмента и принимается в местоположении на поверхности для получения декодированного потока данных. Наземный процессор обрабатывает маркеры синхронизации, чтобы идентифицировать обнаруженное событие, и дополнительно обрабатывает обнаруженное событие в сочетании с предварительно определенной базой данных событий и потоком декодированных данных, используя алгоритм построения кадра для получения скважинных измерений.
[0006] В этом описании сущности изобретения приведены понятия, которые дополнительно описаны ниже в подробном описании. Данная сущность изобретения не предназначена для определения ключевых или существенных отличительных признаков заявленного объекта изобретения, а также не предназначена для использования с целью ограничения объема заявленного объекта изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0007] Для более полного понимания описанного объекта изобретения и его преимуществ приведены следующие описания в сочетании с прилагаемыми графическими материалами, на которых:
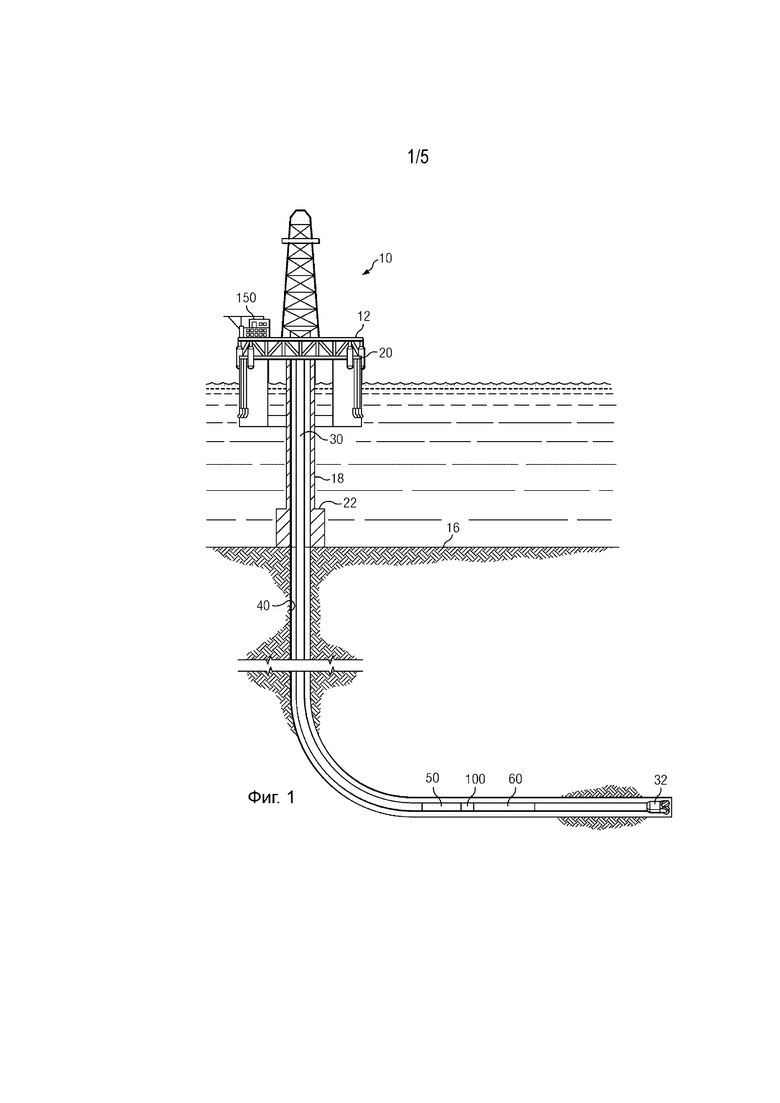
[0008] На фиг. 1 изображена буровая установка, на которой могут использоваться описанные варианты реализации системы и способа.
[0009] На фиг. 2 приведена блок-схема одного описанного варианта реализации способа телеметрии для передачи данных из скважинного местоположения в местоположение на поверхности.
[0010] На фиг. 3 проиллюстрирован другой описанный вариант реализации способа телеметрии.
[0011] На фиг. 4 проиллюстрирован вариант реализации способа телеметрии, аналогичный варианту реализации изобретения, изображенному на фиг. 2.
[0012] На фиг. 5 проиллюстрирован вариант реализации способа телеметрии, аналогичный варианту реализации изобретения, изображенному на фиг. 3.
[0013] На фиг. 6 проиллюстрирована блок-схема одного примера способа, используемого для модификации потока данных.
[0014] На фиг. 7 проиллюстрирован один пример дерева построения кадров для выполнения способа согласно фиг. 6.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0015] Варианты реализации настоящего изобретения в целом относятся к способам телеметрии при осуществлении операций бурения в скважине и, более конкретно, к способу синхронизации операций в скважине и на поверхности во время операции телеметрии. Некоторые варианты реализации настоящего изобретения обеспечивают более надежную передачу скважинных данных на поверхность. Варианты реализации настоящего изобретения позволяют автоматически модифицировать передаваемый поток данных и его содержание (в процессе бурения) в ответ на обнаруженное скважинное событие.
[0016] На фиг. 1 проиллюстрирован пример морской буровой установки, в целом обозначенной 10, подходящей для использования описанных вариантов реализации системы и способа. На фиг. 1 полупогружная буровая платформа 12 расположена над пластом нефти или газа, расположенным ниже морского дна 16. Подводный трубопровод 18 проходит от палубы 20 платформы 12 до устьевой установки 22. Платформа может содержать буровую вышку и подъемное устройство для подъема и опускания бурильной колонны 30, которая, как показано, проходит в буровую скважину 40 и содержит буровое долото 32, передающее устройство 50 и по меньшей мере один инструмент MWD/LWD 60. Бурильная колонна 30 может дополнительно содержать любое количество других инструментов, включая, например, другие инструменты MWD/LWD, стабилизаторы, инструмент для наклонно-направленного бурения роторным способом и/или забойный двигатель.
[0017] На фиг. 1 дополнительно изображены скважинные и наземные системы 100 и 150 управления. Скважинная система 100 развернута в бурильной колонне, например, в непосредственной близости от передающего устройства 50 и инструмента 60 MWD/LWD. Скважинная система 100 может содержать, по существу, любой подходящий скважинный контроллер, например, содержащий программируемый процессор (такой как микропроцессор или микроконтроллер) и электронное запоминающее устройство. Скважинный контроллер может также содержать читаемый процессором или машиночитаемый программный код, воплощающий логику, включая инструкции для управления функцией передающего устройства 50. Наземная система 150 управления может быть развернута, например, на буровой установке и может содержать, по существу, любое подходящее устройство обработки, такое как персональный компьютер. Следует понимать, что описанные варианты реализации изобретения явно не ограничены какими-либо конкретными скважинными и наземными системами.
[0018] Как также изображено на фиг. 1, передающее устройство 50 может содержать по существу любое подходящее скважинное телеметрическое устройство. Например, телеметрическое устройство 50 может содержать электромеханический генератор импульсов или сирену, подходящую для телеметрии по гидроимпульсному каналу связи, генератор электромагнитных волн, подходящий для электромагнитной телеметрии, или акустический генератор, подходящий для акустической телеметрии, или тому подобное. Специалистам в данной области техники с обычным уровнем подготовки будет очевидно, что при телеметрии по гидроимпульсному каналу связи данные передаются на поверхность посредством волн давления и/или импульсов в буровом растворе. При электромагнитной телеметрии данные передаются на поверхность с использованием низкочастотной электромагнитной волны, которая распространяется через геологические пласты. При акустической телеметрии данные передаются на поверхность с использованием акустического сигнала, который распространяется по бурильной колонне. Описанные варианты реализации изобретения не ограничены в этих отношениях, и может использоваться любая подходящая система телеметрии.
[0019] Инструмент 60 MWD/LWD может содержать любой скважинный датчик для каротажа в процессе бурения, например, датчик естественного гамма-излучения, датчик нейтронов, датчик плотности, датчик удельного сопротивления, датчик пластового давления, датчик кольцевого давления, ультразвуковой датчик, звукочастотный акустический датчик и т. п. Такие датчики используются для проведения широкого диапазона измерений в скважине. Инструмент 60 может альтернативно и/или дополнительно содержать различные направленные датчики, такие как акселерометры, магнитометры и/или гироскопические датчики. Инструмент 60 может дополнительно содержать источник энергии, такой как двигатель, генератор, аккумулятор или тому подобное. Например, инструмент LWD, выполненный с возможностью проведения азимутальных измерений гамма-излучения, может содержать источник гамма-излучения (такое устройство обычно называют зондом плотностного каротажа). Аналогично, инструменты LWD, выполненные с возможностью проведения азимутальных измерений удельного сопротивления и скорости распространения звука, могут содержать один или большее количество генераторов электромагнитных волн и акустических передатчиков, соответственно. Описанные варианты реализации изобретения не ограничены ни одним из этих аспектов.
[0020] Специалистам в данной области техники с обычным уровнем подготовки будет понятно, что развертывание, проиллюстрированное на фиг. 1, является примером. Далее будет понятно, что описанные варианты реализации изобретения не ограничиваются использованием с полупогружной платформой 12, как показано на фиг. 1. Описанные варианты реализации изобретения одинаково хорошо подходят для использования с любым видом подземного бурения, будь то в море или на суше.
[0021] В описанных вариантах реализации изобретения скважинные и наземные системы 100 и 150 работают по общему алгоритму; скважинная система 100 генерирует непрерывный поток оцифрованных данных для передачи на поверхность (через передающее устройство 50), а наземная система 150 генерирует гипотетический поток данных, имеющий по существу идентичную структуру с оцифрованным потоком, генерируемым скважинной системой 100. Общий алгоритм упоминается здесь как алгоритм построения кадра. Выполнение алгоритма построения кадра с идентичными начальными условиями как в скважинной, так и в наземной системах 100 и 150, позволяет наземной системе 150 ожидать поток оцифрованных данных, получаемый от скважинной системы 100 и передающего устройства 50. Поток данных может содержать информацию синхронизации (такую как дополнительные биты), чтобы позволить наземной системе 150 идентифицировать часть данных потока (например, переданные данные измерений) даже в случае нарушения синхронизации.
[0022] На фиг. 2 приведена блок-схема одного проиллюстрированного варианта 200 реализации способа телеметрии для передачи данных из скважинного местоположения, такого как бурильная колонна, в местоположение на поверхности. В проиллюстрированном варианте реализации изобретения скважинные и наземные системы 100 и 150 выполнены с возможностью осуществления алгоритма построения кадра, как описано выше, с использованием идентичных начальных условий 202. Начальные условия могут быть установлены (например, запрограммированы в памяти скважинной системы) до начала буровых работ (например, когда буровая система находится на поверхности). Скважинная система 100 запускает алгоритм построения кадра на этапе 212 на основе предварительно установленных начальных условий 202. Скважинные измерения (например, измерения, выполненные инструментом 60 MWD/LWD) получают на этапе 214 и комбинируют с маркерами 216 синхронизации для генерации потока данных в реальном времени (в процессе бурения) на этапе 218. Сгенерированный поток данных затем передается на поверхность на этапе 220. Наземная система 150 запускает алгоритм построения кадра на этапе 252 на основе предварительно установленных начальных условий 202. Переданный поток данных принимается на этапе 254 и повторно синхронизируется на этапе 256, чтобы идентифицировать и извлечь скважинные измерения на этапе 258.
[0023] В ходе операции бурения может возникнуть необходимость в изменении передаваемого потока данных. Например, неисправность датчика может потребовать внесения изменений в содержимое передаваемых данных. Аналогичным образом, может быть желательно изменить содержимое передаваемых данных из-за различных событий, характерных для пласта, или событий, связанных с бурением. Например, дополнительные измерения могут быть получены при проникновении в предварительно определенный пласт или в результате изменения условий бурения, таких как начало прерывистого проскальзывания, вибрации или другие динамические условия бурения. Кроме того, частота измерений может увеличиваться или уменьшаться с изменением скорости бурения. Изменение скорости передачи данных телеметрии (битрейта) также может потребовать модификации передаваемого потока данных. Описанные варианты реализации изобретения, конечно, не ограничены этими конкретными событиями.
[0024] Может быть предусмотрена идентификация еще одного условия, требующего модификации потока данных, например, как показано на фиг. 3, иллюстрирующей блок-схему другого варианта 300 реализации изобретения. Как показано на фиг. 2, скважинная и наземная системы 100 и 150 выполнены с возможностью осуществления алгоритма построения кадра. Начальные условия 302 содержат базу данных 304 событий, содержащую ряд возможных событий, которые сделали бы желательным изменение потока данных (например, события, которые требуют изменения потока данных). Вариант 300 реализации изобретения аналогичен варианту 200 реализации изобретения в том, что скважинная система 100 запускает алгоритм построения кадра на этапе 312 на основе предварительно установленных начальных условий 302. Скважинные измерения (например, измерения, выполненные инструментом 60 MWD/LWD) получают на этапе 314 и комбинируют с маркерами 316 синхронизации для генерации потока данных в реальном времени (в процессе бурения) на этапе 318. Одно или большее количество событий, требующих модификации потока данных, могут быть обнаружены на этапе 320. Как описано выше, такие события могут включать, например, проникновение в предварительно определенный пласт или пласты, изменение условий бурения или запрос по нисходящей линии связи от наземной системы 150. Обнаружение события на этапе 320 инициирует изменение начальных условий на основе условий, установленных в базе данных событий.
[0025] После обнаружения события (событий) на этапе 320 скважинная система 100 повторно запускает алгоритм построения кадра на этапе 322 на основе новых начальных условий (из базы данных событий). Маркеры 326 синхронизации могут быть добавлены для обновления потока данных в реальном времени на этапе 328. Обновленный поток данных затем может быть передан в наземную систему на этапе 330.
[0026] Как также изображено на фиг. 3, наземная система 150 запускает алгоритм построения кадра на этапе 352 на основе предварительно установленных начальных условий 302. Переданный поток данных принимается на этапе 354 и оценивается на этапе 356 для выявления маркеров синхронизации, добавленных на этапе 326, чтобы идентифицировать новые начальные условия (из базы данных 304 событий). Наземная система 150 затем повторно запускает алгоритм построения кадра на этапе 360 на основе новых начальных условий, чтобы извлечь скважинные измерения на этапе 362.
[0027] На фиг. 4 проиллюстрирована блок-схема варианта 400 реализации изобретения, аналогичного варианту 200 реализации изобретения. Данные датчика в процессе бурения на этапе 402 получает скважинная система 100 и обрабатывает с использованием алгоритма построения кадра на этапе 404 для генерации потока необработанных данных на этапе 406. Поток необработанных данных обрабатывается с использованием кодера синхронизации для генерации синхронизированного потока данных (например, потока оцифрованных данных, содержащего биты синхронизации) на этапе 408 с использованием предварительно определенных параметров 415 кодера. Синхронизированный поток данных передается на поверхность на этапе 410 с использованием скважинной телеметрической системы (например, передающего устройства 50). Как известно специалистам в данной области техники, такая передача может приводить к потере данных или затуханию их сигнала из-за помех окружающей среды, таких как шум, затухание, перекрестные помехи и т. д., как схематически изображено на этапе 420. Переданный сигнал на этапе 432 принимается наземной системой 150 и обрабатывается с использованием декодера синхронизации данных на этапе 434 с применением параметров 415 кодера (тех же параметров, которые используются для синхронизации потока данных в скважинной системе) для получения входного (принятого) потока данных на этапе 436. Затем входной поток данных обрабатывается на этапе 438 с использованием алгоритма построения кадра для получения восстановленных измерений в скважине на этапе 440.
[0028] Пример варианта реализации изобретения, изображенный на фиг. 4, иллюстрирует, как скважинная система 100 может генерировать поток оцифрованных данных, содержащий маркеры/биты синхронизации, и как наземная система 150 может затем восстановить исходную структуру данных, чтобы извлечь измерения. Согласно способу в данные добавляется информация синхронизации и контекста (посредством битов синхронизации), так что наземная система 150 может определить характер передаваемых данных, даже если информация отсутствует или искажена (например, из-за факторов окружающей среды, проиллюстрированных на этапе 420). Информация синхронизации может содержать, например, два компонента, которые повторяются с предварительно определенным периодом, известным как скважинной 100, так и наземной 150 системам; (i) информация синхронизации и (ii) необязательная контекстная информация потока данных.
[0029] Как известно специалистам в данной области техники с обычным уровнем подготовки, канал 420 связи может вносить ошибки потока данных (например, из-за шума и/или затухания сигнала). Эти ошибки могут, в свою очередь, вызывать рассинхронизацию и последующую потерю данных. Повторение битов синхронизации (информации синхронизации) с известным периодом позволяет наземной системе 150 периодически проверять синхронизацию принятого потока данных. Следует понимать, что выбор битов синхронизации (или комбинации битов) может осуществляться на основе характеристик методологии телеметрии. Например, биты синхронизации могут быть выбраны таким образом, чтобы максимизировать расстояние Хэмминга между шаблонами синхронизации и обеспечить подходящий баланс выбора символа телеметрии, чтобы максимизировать частоту успешного восстановления данных.
[0030] Кроме того, следует понимать, что кодирование синхронизации (включая биты синхронизации в потоке данных, как описано в данном документе) имеет тенденцию ухудшать эффективность передачи данных (за счет добавления дополнительных битов к данным в потоке битов). В некоторых вариантах реализации изобретения биты синхронизации и период синхронизации могут быть дополнительно оптимизированы, чтобы сбалансировать требования к стабильности и передаваемой служебной информации.
[0031] Необязательная контекстная информация потока данных предназначена для уникальной идентификации порядка данных в потоке данных, генерируемом алгоритмом построения кадра. Контекстная информация может дополнительно указывать изменения в потоке данных, например, из-за события, которое требует изменения потока данных (например, событие, которое делает желательным изменение потока данных). Контекстная информация также может периодически повторяться в потоке данных для обеспечения успешного детектирования.
[0032] На фиг. 5 проиллюстрирована блок-схема варианта 500 реализации изобретения, аналогичного варианту 300 реализации изобретения. Данные датчика в процессе бурения на этапе 502 получает скважинная система 100 и обрабатывает с использованием алгоритма построения кадра на этапе 504 для генерации потока необработанных данных на этапе 506. Поток необработанных данных обрабатывается с использованием кодера синхронизации для генерации синхронизированного потока данных (например, потока оцифрованных данных, содержащего биты синхронизации) на этапе 508 с использованием предварительно определенных параметров 515 кодера. Скважинные датчики и/или процессор, выполненные с возможностью определения состояния бурения и/или состояния буровой установки, могут использоваться на этапе 510 для обнаружения одного или большего количества событий, требующих модификации потока данных на этапе 512 (например, как описано выше). Подходящий процессор состояния бурения описан в публикации патента США 2014/0129148 (которая включена в данный документ в полном объеме посредством ссылки).
[0033] После обнаружения события (событий) на этапе 512 новые начальные условия из базы данных 525 событий могут быть введены в алгоритм построения кадра и кодер синхронизации так, что данные, принятые на этапе 502, обрабатываются с новыми начальными условиями для получения синхронизированного потока данных. Этот поток данных затем может передаваться на поверхность на этапе 514 с использованием скважинной телеметрической системы. Как известно специалистам в данной области техники, такая передача может приводить к потере данных или затуханию их сигнала из-за помех окружающей среды, таких как шум, затухание, перекрестные помехи и т. д., как схематически изображено на этапе 520. Переданный сигнал принимается на этапе 532 в наземной системе 150 и обрабатывается с использованием декодера синхронизации данных на этапе 534 с применением параметров 515 кодера и новых начальных условий из базы данных 525 событий (тех же параметров, которые используются для синхронизации потока данных в скважинной системе) для получения входного (принятого) потока данных на этапе 536. Затем входной поток данных обрабатывается на этапе 538 с использованием алгоритма построения кадра для получения восстановленных измерений в скважине на этапе 540.
[0034] Как также изображено на фиг. 2-5, алгоритм построения кадра может быть запрограммирован по существу с любыми подходящими начальными условиями (которые также могут упоминаться как входные параметры). Начальные условия могут содержать, например, состав оборудования низа бурильной колонны (BHA, от англ. bottom hole assembly), включая количество и порядок инструментов и датчиков, установленных в BHA. Начальные условия могут дополнительно содержать скорость передачи данных телеметрии (битрейт), а также скорость (или диапазон скоростей) проникновения при бурении. Скорость проникновения может быть предварительно определена, рассчитана в скважине или получена с поверхности по нисходящей линии связи. Начальные условия могут также содержать список (или набор) приоритетных измерений (например, критически важных измерений), которые должны передаваться ВНА на поверхность с предварительно определенным или рассчитанным вертикальным разрешением.
[0035] Следует понимать, что природа приоритетных измерений (например, критически важных измерений) или архитектура BHA могут налагать ограничения на формат цифрового потока данных, генерируемого алгоритмом построения кадра. Эти ограничения могут включать, например, следующие ограничения, но не ограничиваются ими: (i) некоторые измерения могут зависеть от других измерений, так что включение одного из них в поток данных требует включения другого (других); (ii) некоторые измерения могут быть несовместимы с другими измерениями, так что включение одного из них требует исключения другого (других); (iii) может быть желательной (или необходимой) определенная последовательность различных измерений; и (iv) может быть желательным (или необходимым) различный минимальный или максимальный интервал между различными измерениями.
[0036] В обычных операциях бурения решение по описанным выше ограничениям принимает оператор бурения на поверхности и, следовательно, они не могут быть реализованы автоматически в скважине. В отличие от обычных операций бурения, некоторые описанные варианты реализации изобретения предоставляют способ для автоматического разрешения ограничений с использованием скважинного процессора. Описанные выше ограничения могут быть представлены в виде правил, например, (i) добавить, (ii) удалить, (iii) переставить и (iv) проверить правила.
[0037] Правила добавления и удаления обеспечивают выполнение описанных выше зависимостей измерений, например, путем добавления или удаления измерений в последовательность измерений или из нее. Эти правила предназначены для обеспечения соблюдения первого и второго ограничений из указанных выше. Правило перестановок предназначено для обеспечения соблюдения третьего и четвертого ограничений путем перестановки в последовательности измерений для создания определенной последовательности и/или для удовлетворения ограничений, связанных с обеспечением определенного интервала между измерениями. Правило проверки предназначено для того, чтобы правило перестановок не нарушало правило добавления или удаления.
[0038] На фиг. 6 изображена блок-схема одного примера способа 600, используемого для модификации потока данных, например, после идентификации предварительно определенного инициирующего события. Таким образом, способ 600 можно использовать для обновления алгоритма построения кадра на основе новых начальных условий в базе данных событий. Новые входные условия принимаются на этапе 602, например, в форме начального списка скважинных измерений, которые должны быть переданы на поверхность. Эти измерения могут обрабатываться в скважине с использованием алгоритма 604 зависимости, например, включающего вышеописанные правила добавления и удаления, чтобы определить окончательный список измерений для передачи на поверхность. Окончательный список измерений затем может быть дополнительно обработан в скважине с использованием, например, алгоритма 606 упорядочения, включающего вышеописанные правила перестановки и проверки, чтобы установить порядок и интервал между измерениями и определить структуру кадра на этапе 608.
[0039] Следует понимать, что способ 600 может быть дополнительно проиллюстрирован в качестве примера дерева построения кадров. На фиг. 7 изображен один такой пример дерева 700 построения кадров. Дерево 700 может начинаться с начальной проверки 710 (C1), чтобы убедиться в том, что правильные начальные условия получены и используются для определения соответствующей структуры кадра. После начальной проверки дерево 700 построения кадров может выполняться слева направо. Изображенный вариант реализации изобретения продолжается последовательностью 720 сложения/вычитания, которая может рассматриваться как аналог алгоритма 604 зависимости, описанного выше со ссылкой на фиг. 6. Изображенная последовательность 720 сложения/вычитания содержит процедуру 730 сложения/вычитания для каждого измерительного прибора в оборудовании низа бурильной колонны (или, соответственно, для каждого измерения). Например, крайняя левая (первая) процедура 720 сложения/вычитания содержит правило А1 сложения, за которым следуют правила S1, S2 и S3 вычитания. Вторая и третья процедуры сложения/вычитания содержат соответствующие правила сложения A2 и A3, за которыми также следуют правила вычитания S1, S2 и S3. Дерево 700 может затем быть продолжено правилами проверки C1 и C2 и правилами перестановки R1, R2, R3, R4 и R5, которые предназначены для установления порядка и интервалов между измерениями. Таким образом, правила проверки и правила перестановки могут рассматриваться как аналог алгоритма 606 упорядочения, описанного выше со ссылкой на фиг. 6.
[0040] Хотя система и способ передачи скважинных данных и синхронизации на поверхности были подробно описаны, следует понимать, что различные изменения, замены и чередования могут быть выполнены в данном описании без отклонения от сущности и объема изобретения, определяемых прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННОЕ УСТРОЙСТВО И СПОСОБЫ ПЕРЕДАЧИ ДАННЫХ | 2006 |
|
RU2417314C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СЖАТИЯ СЕЙСМИЧЕСКОГО СИГНАЛА В СКВАЖИНЕ | 2012 |
|
RU2570699C2 |
| СИСТЕМА И СПОСОБ ТЕЛЕМЕТРИИ В СТВОЛЕ СКВАЖИНЫ | 2007 |
|
RU2444622C2 |
| СКВАЖИННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ТЕЛЕМЕТРИЧЕСКИЙ ПРИЕМНИК | 2016 |
|
RU2695434C1 |
| СИСТЕМА ДВУСТОРОННЕЙ ТЕЛЕМЕТРИИ ПО БУРИЛЬНОЙ КОЛОННЕ ДЛЯ ИЗМЕРЕНИЙ И УПРАВЛЕНИЯ БУРЕНИЕМ | 2006 |
|
RU2413841C2 |
| АВТОМАТИЗАЦИЯ БУРЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ НА ОСНОВЕ СТОХАСТИЧЕСКОЙ ТЕОРИИ | 2013 |
|
RU2633006C1 |
| СПОСОБЫ И ОТНОСЯЩИЕСЯ К НИМ СИСТЕМЫ ПОСТРОЕНИЯ МОДЕЛЕЙ И ПРОГНОЗИРОВАНИЯ ОПЕРАЦИОННЫХ РЕЗУЛЬТАТОВ ОПЕРАЦИИ БУРЕНИЯ | 2013 |
|
RU2600497C2 |
| СИСТЕМА И СПОСОБ ТЕЛЕМЕТРИИ ДАННЫХ МЕЖДУ СОСЕДНИМИ СКВАЖИНАМИ | 2017 |
|
RU2755609C2 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ ИЗОБРАЖЕНИЯ БУРОВОЙ СКВАЖИНЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2511026C2 |
| СПОСОБ И ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕИСПРАВНОСТИ В КАБЕЛЬНОЙ БУРИЛЬНОЙ ТРУБЕ | 2007 |
|
RU2436109C2 |




Изобретение относится к области телеметрии при осуществлении операций бурений в скважине. Техническим результатом является обеспечение более надежной передачи скважинных данных на поверхность. В процессе передачи происходит обнаружение события, которое делает желательным изменение передаваемого потока данных. Скважинный процессор обрабатывает обнаруженное событие в сочетании с предварительно определенной базой данных событий и данными измерений в скважине, используя алгоритм построения кадра для вычисления потока цифровых данных. Маркеры синхронизации добавляются в поток данных для получения синхронизированного потока данных, в котором маркеры синхронизации идентифицируют обнаруженное событие. Синхронизированный поток данных передается в местоположение на поверхности с использованием скважинного телеметрического инструмента и принимается в местоположении на поверхности для получения декодированного потока данных. Наземный процессор обрабатывает маркеры синхронизации, чтобы идентифицировать обнаруженное событие, и дополнительно обрабатывает обнаруженное событие в сочетании с предварительно определенной базой данных событий и потоком декодированных данных, используя алгоритм построения кадра для получения скважинных измерений. 2 н. и 12 з.п. ф-лы, 7 ил.
1. Способ телеметрии для передачи данных из скважинного местоположения в местоположение на поверхности, включающий:
(а) обнаружение скважинного события, которое требует изменения передаваемого потока данных;
(b) обеспечение обработки скважинным процессором обнаруженного в (а) скважинного события в сочетании с предварительно определенной базой данных событий и данными измерений в скважине, используя алгоритм построения кадра для вычисления потока цифровых данных;
(c) добавление маркеров синхронизации в поток данных, вычисленный в (b), для получения синхронизированного потока данных, при этом маркеры синхронизации идентифицируют скважинное событие, обнаруженное в (a);
(d) передачу синхронизированного потока данных в местоположение на поверхности с использованием скважинного телеметрического инструмента;
(e) прием синхронизированного потока данных в местоположении на поверхности для получения декодированного потока данных;
(f) обеспечение обработки наземным процессором маркеров синхронизации для идентификации скважинного события, обнаруженного в (а); и
(g) обеспечение обработки наземным процессором события, обнаруженного в (а), в сочетании с предварительно определенной базой данных событий и декодированным потоком данных, используя алгоритм построения кадра, обработанный в (b), для получения скважинных измерений.
2. Способ по п. 1, отличающийся тем, что событие, обнаруженное в (а), содержит по меньшей мере одно из следующего: (i) получение команды от местоположения на поверхности, (ii) проникновение в предварительно определенный пласт или пласты в процессе бурения, (iii) изменение условий бурения или (iv) изменение скорости передачи телеметрических данных.
3. Способ по п. 1, отличающийся тем, что (b) также включает:
(i) получение новых входных условий из базы данных событий на основе события, обнаруженного в (а);
(ii) обработку новых входных условий с использованием алгоритма проверки зависимости для определения окончательного списка измерений в скважине, которые должны быть переданы в (d); и
(iii) обработку окончательного списка измерений с использованием алгоритма упорядочения для вычисления структуры кадра для потока цифровых данных.
4. Способ по п. 3, отличающийся тем, что алгоритм проверки зависимости использует правила сложения и правила вычитания, причем правила сложения добавляют измерения в скважине в окончательный список измерений в скважине, а правила вычитания удаляют измерения в скважине из окончательного списка измерений в скважине.
5. Способ по п. 3, отличающийся тем, что алгоритм упорядочения использует правила перестановок, которые изменяют порядок измерений в скважине для достижения предварительно определенного интервала и порядка измерений в скважине в окончательном списке измерений в скважине.
6. Способ по п. 1, отличающийся тем, что скважинный телеметрический инструмент содержит инструмент для телеметрии по гидроимпульсному каналу связи, инструмент электромагнитной телеметрии или инструмент акустической телеметрии.
7. Способ по п. 1, отличающийся тем, что (f) дополнительно включает обеспечение обработки наземным процессором маркеров синхронизации в сочетании с базой данных событий для идентификации скважинного события, обнаруженного в (а).
8. Способ телеметрии для передачи данных из скважинного местоположения в местоположение на поверхности, включающий:
(а) получение данных измерений в скважине при бурении подземной скважины;
(b) обеспечение обработки скважинным процессором скважинных измерений с использованием алгоритма построения кадра для вычисления потока цифровых данных для передачи на поверхность;
(c) обнаружение скважинного события, которое требует изменения потока цифровых данных;
(d) обеспечение обработки скважинным процессором скважинного события, обнаруженного в (c), в сочетании с предварительно определенной базой данных событий для модификации алгоритма построения кадра;
(e) обеспечение обработки скважинным процессором измерений в скважине, используя алгоритм построения кадра, модифицированный в (d), для вычисления модифицированного потока цифровых данных;
(f) добавление маркеров синхронизации в модифицированный поток данных, вычисленный в (е), для получения синхронизированного потока данных, причем маркеры синхронизации идентифицируют скважинное событие, обнаруженное в (с);
(g) передачу синхронизированного потока данных в местоположение на поверхности с использованием скважинного телеметрического инструмента;
(h) прием синхронизированного потока данных в местоположении на поверхности для получения декодированного потока данных;
(i) обеспечение обработки наземным процессором маркеров синхронизации для идентификации скважинного события, обнаруженного в (с);
(j) обеспечение обработки наземным процессором события, обнаруженного в (c), в сочетании с предварительно определенной базой данных событий для модификации алгоритма построения кадра; и
(k) обеспечение обработки наземным процессором декодированного потока данных, используя алгоритм построения кадра, модифицированный в (j), для получения скважинных измерений.
9. Способ по п. 8, отличающийся тем, что событие, обнаруженное в (с), содержит по меньшей мере одно из следующего: (i) получение команды от местоположения на поверхности, (ii) проникновение в предварительно определенный пласт или пласты в процессе бурения, (iii) изменение условий бурения или (iv) изменение скорости передачи телеметрических данных.
10. Способ по п. 8, отличающийся тем, что (d) дополнительно включает:
(i) получение новых входных условий из базы данных событий на основе события, обнаруженного в (с);
(ii) обработку новых входных условий с использованием алгоритма проверки зависимости для определения окончательного списка измерений в скважине, которые должны быть переданы в (g); и
(iii) обработку окончательного списка измерений с использованием алгоритма упорядочения для вычисления структуры кадра для потока цифровых данных.
11. Способ по п. 10, отличающийся тем, что алгоритм проверки зависимости использует правила сложения и правила вычитания, причем правила сложения добавляют измерения в скважине в окончательный список измерений в скважине, а правила вычитания удаляют измерения в скважине из окончательного списка измерений в скважине.
12. Способ по п. 10, отличающийся тем, что алгоритм упорядочения использует правила перестановок, которые изменяют порядок измерений в скважине для достижения предварительно определенного интервала и порядка измерений в скважине в окончательном списке измерений в скважине.
13. Способ по п. 8, отличающийся тем, что скважинный телеметрический инструмент содержит инструмент для телеметрии по гидроимпульсному каналу связи, инструмент электромагнитной телеметрии или инструмент акустической телеметрии.
14. Способ по п. 8, отличающийся тем, что (i) дополнительно включает обеспечение обработки наземным процессором маркеров синхронизации в сочетании с базой данных событий для идентификации скважинного события, обнаруженного в (с).
| СПОСОБЫ И СИСТЕМЫ ДЛЯ СКВАЖИННОЙ ТЕЛЕМЕТРИИ | 2010 |
|
RU2529595C2 |
| СКВАЖИННОЕ УСТРОЙСТВО И СПОСОБЫ ПЕРЕДАЧИ ДАННЫХ | 2006 |
|
RU2417314C2 |
| US 20070057811 A1, 15.03.2007 | |||
| US 3991611 A1, 16.11.1976 | |||
| US 20070189119 A1, 16.08.2007 | |||
| US 7348893 B2, 25.03.2008 | |||
| US 20150078625 A1, 19.03.2015 | |||
| WO 2016200766 A1, 15.12.2016. | |||

