Изобретение относится к испытаниям входящей в состав автотранспортных средств (АТС) аппаратуры потребителей сигналов спутниковых радионавигационных систем, а именно, к испытаниям систем приёма навигационных сигналов – далее – навигационных систем.
Из книги Николаев П.А. Электромагнитная совместимость автотранспортных средств [Текст] / Николаев П.А., Кечиев Л.Н. / Под ред. Л.Н. Кечиева. – М.: Грифон, 2015. – 424 с. – (Библиотека ЭМС) известен способ испытаний навигационных систем на помехоустойчивость, содержащий следующие этапы:
- Установку на поворотный стенд электромагнитной безэховой камеры испытуемого АТС, оснащённого навигационной системой, содержащей антенну и приемник.
- Создание в области расположения АТС навигационного поля, формируемого имитатором излучения группировки спутников, который в своём составе содержит расположенный в защищённой от внешних факторов зоне безэховой камеры генератор имитатора и расположенную в безэховой камере антенну имитатора.
- Вычисление навигационным приемником АТС координаты места расположения, выполняемое на основании информации, получаемой от имитатора излучения группировки спутников.
Недостатком данного способа является позиционирование антенны имитатора излучения группировки спутников в обусловленном испытаниями на помехоустойчивость конкретном месте безэховой камеры, что не обеспечивает проверку качества навигационных систем АТС в достаточной области верхней виртуальной полусферы (в телесном угле 00 - 1800).
Из ГОСТ 33471-2015 известен способ испытаний навигационных приёмников систем вызова экстренных оперативных служб АТС, заключающийся в проверке на испытательном стенде параметров точности позиционирования приёмников и их чувствительности.
Стенд включает в себя имитатор излучения группировки спутников, малошумящий усилитель, аттенюаторы, адаптер питания и компьютер.
В способе по ГОСТ 33471-2015 навигационный приёмник размещают на стенде и подключают его к адаптеру питания; имитатор излучения группировки спутников, через малошумящий усилитель (при оценке погрешности определения координат) или через малошумящий усилитель и аттенюаторы (при оценке чувствительности приёмника), соединяют с антенным входом навигационного приёмника; канал связи навигационного приёмника с внешними устройствами соединяют с компьютером.
Во время испытаний на антенный вход навигационного приемника подают информацию, сформированную имитатором излучения группировки спутников, а посредством компьютера обеспечивают запись в файл сообщений, выдаваемых навигационным приёмником.
В процессе выполнения сценария имитации выделяют из файла информацию об определённых в ходе испытаний координатах местоположения и вычисляют погрешности их определения, или производят определение чувствительности навигационного модуля в режимах поиска (захвата) и удержания (слежения) сигналов навигационной системы.
Недостатком данного способа является проведение испытаний навигационного приёмника без его интеграции с АТС, что не позволяет оценивать влияние конфигурации кузова АТС и особенности компоновки навигационного системы/модуля на точность определения координат.
За прототип предлагаемого изобретения принят известный из патента RU 119893, МПК G01R 29/10, публ. 27.08.2012, способ испытаний приемных устройств сигналов спутниковых навигационных систем, в котором:
- испытуемое АТС, оснащённое навигационной системой, содержащей приёмник и антенну, размещают на поворотном стенде экранированной безэховой камеры, оснащённой также имитатором излучения группировки спутников, содержащим антенну имитатора, способную формировать круговую поляризацию, и генератор сигналов имитатора, а также угломестную направляющую антенны имитатора;
- АТС подвергают воздействию двух типов поляризованных электромагнитных сигналов, формируемых антенной и генератором имитатора, один из которых представляет собой непрерывный гармонический, перестраиваемый по навигационным частотам, сигнал, а другой эквивалентен усреднённому, по уровню, значению сигналов спутниковых навигационных систем,
- взаимно ориентируя АТС, посредством вращения поворотного стенда в азимутальной плоскости, и антенну имитатора, посредством ее перемещения в угломестной плоскости, по реакциям на формируемые имитатором эквивалентный и гармонический сигналы, производят оценку качества навигационного приёмника АТС и измерения диаграммы направленности антенны навигационной системы АТС.
Недостатком данного способа является использование усреднённого, по уровню, значения сигналов спутниковых навигационных систем, что не позволяет задействовать навигационный приёмник АТС для вычислений местоположения АТС, последнее не позволяет получить комплексную оценку влияния конфигурации АТС на качество работы навигационных систем, а также оценку точности местоположения АТС в условиях действия внешних электромагнитных помех.
Задачей изобретения является создание способа испытаний навигационных систем автотранспортных средств, обеспечивающего комплексную оценку точности определения местоположения АТС, в том числе и в условиях действия внешних электромагнитных помех, с учетом особенностей компоновки навигационной системы в АТС.
Указанная задача решается в способе испытаний навигационных систем АТС, в котором испытуемое АТС, оснащённое навигационной системой, включающей в себя приёмник и антенну, размещают на поворотном стенде электромагнитной безэховой камеры, содержащей в своём составе имитатор излучения группировки спутников, включающий в себя антенну имитатора и генератор сигналов имитатора, а также угломестную направляющую антенны имитатора, изменяя в азимутальной плоскости ориентацию АТС, а в угломестной плоскости ориентацию антенны имитатора испытуемое АТС подвергают воздействию электромагнитных сигналов, формируемых антенной и генератором имитатора, по результатам испытаний производят оценку качества навигационного приёмника АТС.
Задача решается тем, что:
- в процессе испытаний используют имитатор, генератор и антенна которого выполнены с возможностью формирования электромагнитных сигналов, имитирующих собой навигационные сигналы группировки спутников, при этом генератор имитатора устанавливают в защищенном от внешних факторов месте, преимущественно, в экранированном помещении;
- в процессе испытаний используют угломестную направляющую антенны имитатора, выполненную с возможностью перемещения антенны имитатора по дуге геометрического кругового сектора, радиус которого (r) больше максимального линейного размера АТС, плоскости которого принадлежит геометрическая ось вращения поворотного стенда, а также с возможностью эквидистантного расположения антенны имитатора, относительно геометрического центра гипотетически установленного на поворотном стенде АТС;
- в процессе испытаний используют оснащённый специализированным программным обеспечением компьютер, выполненный с возможностью обработки навигационных параметров, принятых приёмником навигационной системы испытуемого АТС, и вычисления критериев их соответствия регламентирующим требованиям, при этом компьютер устанавливают в защищенном от внешних факторов месте, преимущественно, в экранированном помещении, а также с возможностью соединения компьютера и приёмника навигационной системы испытуемого АТС посредством помехозащищенной линии связи;
- перед началом испытаний навигационной системы, интегрированной в АТС, приёмник и антенну навигационной системы размещают на диэлектрическом столе, предварительно установленном на поворотном стенде безэховой камеры, при этом антенну навигационной системы располагают в геометрическом центре гипотетически установленного на поворотном стенде АТС, а антенну имитатора располагают на угломестной направляющей с расположением антенны имитатора, относительно антенны навигационной системы, в зенитном угле Θ = 00, антенну имитатора соединяют с генератором имитатора, а приёмник навигационной системы с антенной навигационной системы и, посредством помехозащищенной линии связи, с компьютером, после завершения установки навигационной системы и антенны имитатора выполняют калибровку выходной мощности генератора имитатора при круговой поляризации излучающих сигнала, для чего навигационную систему переводят в режим приёма навигационных сигналов, компьютер в режим обработки параметров, принятых приёмником навигационной системы, а генератор имитатора в режим имитации сигналов навигационных спутников, в процессе калибровки настраивают и запоминают мощность сигнала и количество спутников, при которых навигационный параметр, вычисляемый навигационным приемником соответствует условию S < Sпр, где
S – навигационный параметр, например, HDOP или VDOP;
Sпр – предельный навигационный параметр;
- после завершения калибровки выходной мощности генератора имитатора, навигационную систему устанавливают в АТС, которое, в свою очередь, размещают на поворотном стенде безэховой камеры;
- на сферическом сегменте телесного угла 1700 виртуальной полусферы, характеризуемой множеством точек возможного позиционирования антенны имитатора на угломестной направляющей и множеством возможных, относительно угломестной направляющей, положений расположенного на поворотном стенде АТС, в соответствии с планом испытаний задают, в зенитных и азимутальных углах, некоторое множество точек расположения антенны имитатора по отношению к АТС, в каждой из заданных точек позиционирования антенны имитатора по отношению к АТС осуществляют определение навигационных параметров, для чего навигационную систему переводят в режим приёма навигационных сигналов, компьютер в режим обработки параметров, принятых приёмником навигационной системы, а генератор и антенну имитатора в режим трансляции калиброванных по мощности сигналов, имитирующих собой сигналы навигационных спутников;
- оценку качества навигационного приёмника АТС осуществляют на основе комплексной оценки параметров точности определения местоположения навигационной системы, интегрированной в АТС, определяемой из критерия:
Р ≥ Рпр, где
Рпр – предельный показатель, характеризующий достаточное качество работы навигационной системы, интегрированной в АТС, и задаваемый в технической документации на разработку АТС,
Р – комплексный показатель точности определения местоположения, определяемый из выражения:
 , где
, где
N – полное количество мест позиционирования антенны, излучающей навигационные сигналы на сферическом сегменте виртуальной полусферы;
 – точка на сферическом сегменте виртуальной полусферы, определяющая конкретное место позиционирования антенны, излучающей навигационные сигналы;
– точка на сферическом сегменте виртуальной полусферы, определяющая конкретное место позиционирования антенны, излучающей навигационные сигналы;
φi
 [00; 3600] – азимутальный угол позиционирования;
[00; 3600] – азимутальный угол позиционирования;
Θj [00; 900] – зенитный угол позиционирования;
r – радиус сферического сегмента виртуальной полусферы, задан расположением и ориентацией угломестной направляющей относительно геометрической оси вращения поворотного стенда, а также геометрическими параметрами угломестной направляющей, предопределяющими множество возможных точек позиционирования антенны имитатора на угломестной направляющей;
S – навигационный параметр, например, HDOP или VDOP;
Sпр – предельный навигационный параметр;
K ≤ N – количество мест позиционирования антенны, излучающей навигационные сигналы на сферическом сегменте, где выполняется условие S ≤ Sпр.
Изобретение поясняется следующими чертежами:
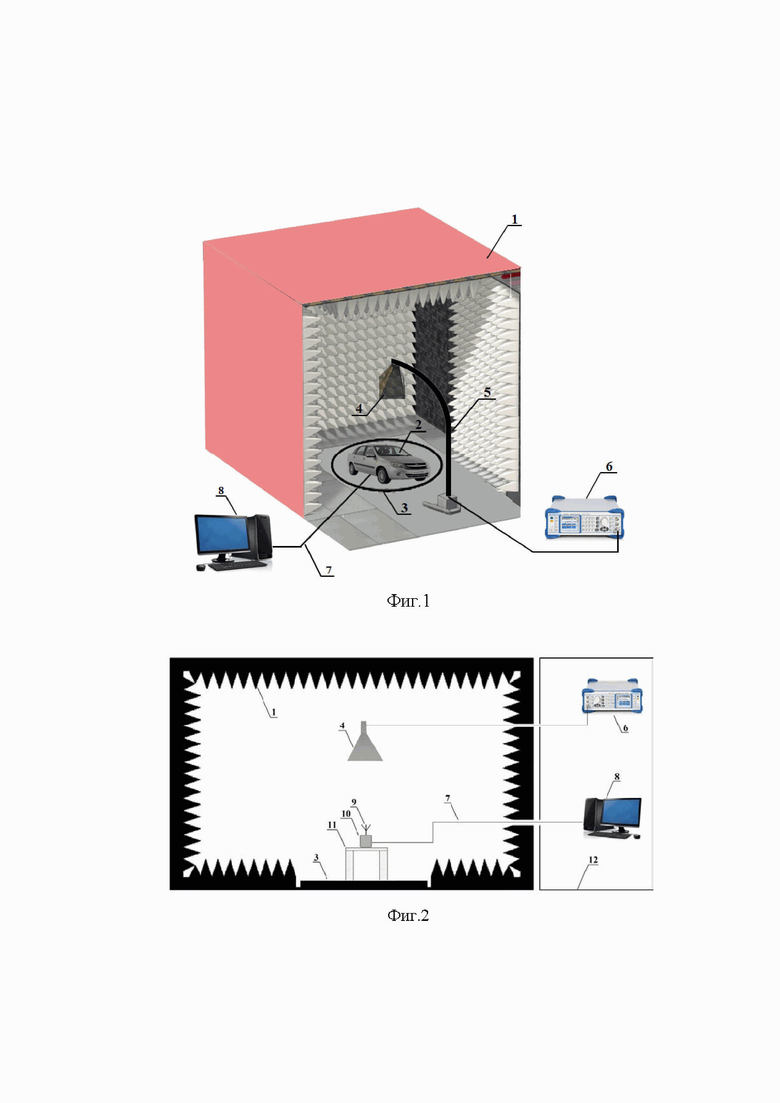
Фиг.1, где схематично показаны:
1 – испытательная безэховая камера;
2 – испытываемое АТС содержащее навигационную систему;
3 – поворотный стенд;
4 –антенна имитатора излучения группировки спутников (антенна имитатора);
5 –угломестная направляющая антенны имитатора;
6 – генератор сигналов имитатора излучения группировки спутников (генератор имитатора);
7 – помехозащищенная линия связи компьютера и приёмника навигационной системы;
8 – компьютер.
Фиг.2, где схематично показано размещение оборудования в процессе калибровки испытываемой навигационной системы (угломестная направляющая антенны имитатора условно не показана):
9 –антенна приемника навигационной системы;
10 – приемник навигационной системы;
11 – диэлектрический стол, для размещения навигационной системы в процессе калибровки выходной мощности генератора имитатора;
12 – защищенное от внешних факторов (экранированное) помещение.
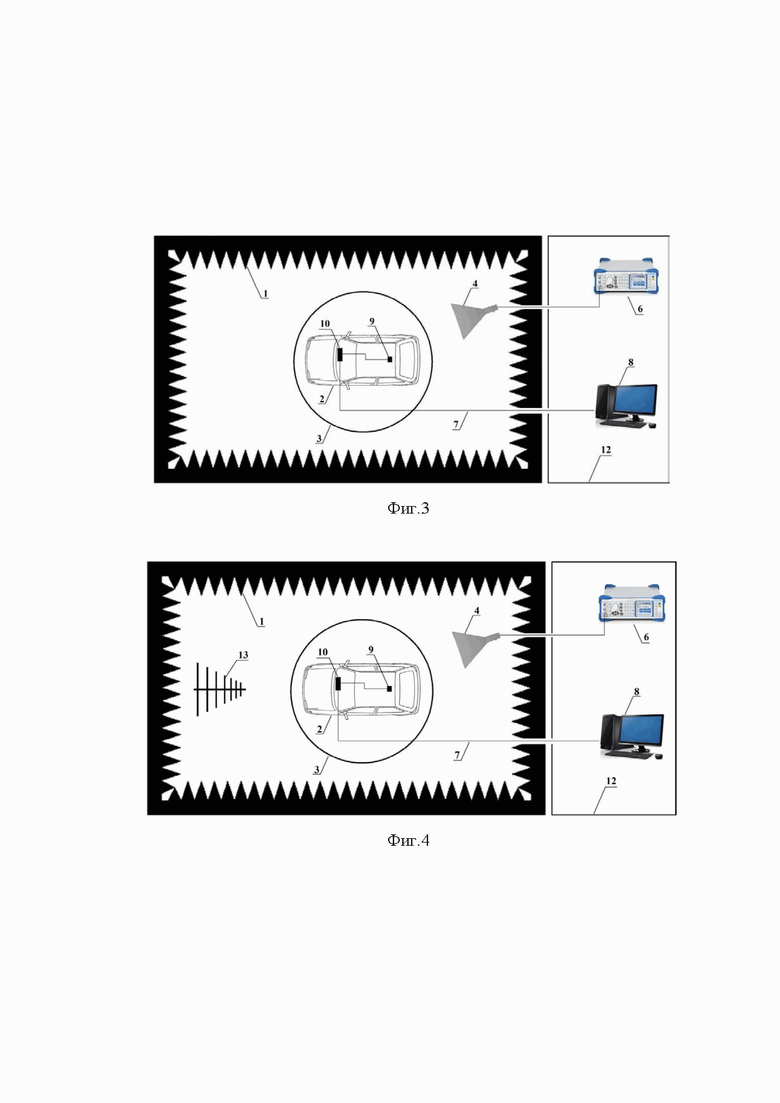
Фиг.3, где схематично показано размещение оборудования в процессе испытаний интегрированной в АТС навигационной системы, в случае их проведения без воздействия внешних помех (угломестная направляющая антенны имитатора условно не показана).
Фиг.4, где схематично показано размещение оборудования в процессе испытаний интегрированной в АТС навигационной системы, в случае их проведения с сопутствующим воздействием внешних электромагнитных помех (угломестная направляющая антенны имитатора условно не показана):
13 – излучающая внешние электромагнитные помехи антенна.
Изобретение может быть реализовано в испытательной электромагнитной безэховой камере 1, содержащей в своем составе поворотный стенд 3, как вариант, оснащённый беговыми барабанами (не показаны), имитатор излучения группировки спутников, включающий в себя антенну 4 имитатора и генератор 6 сигналов имитатора, угломестную направляющую 5 антенны имитатора, компьютер 8, помехозащищенную линию 7 связи компьютера и приёмника навигационной системы, защищенное от внешних факторов (экранированное) помещение 12, переносной диэлектрический стол 11, а также излучающую внешние электромагнитные помехи антенну 13. В процессе испытаний в безэховой камере 1 размещают испытываемую навигационную систему, содержащую в своём составе приёмник 10 и антенну 9:
- На этапе калибровки выходной мощности генератора 6 имитатора приёмник 10 и антенну 9 испытываемой навигационной системы размещают на диэлектрическом столе 11, предварительно установленном на поворотном стенде 3. При этом антенну 9 позиционируют на геометрической оси вращения поворотного стенда 3 и на высоте расположения геометрического центра, гипотетически установленного на поворотном стенде АТС 2.
- На этапе испытаний навигационной системы и её конфигурации в составе АТС 2, приёмник 10 и антенну 9 навигационной системы интегрируют с АТС 2 штатно, а АТС 2 устанавливают на поворотном стенде 3, при наличии беговых барабанов - на беговых барабанах (не показаны) поворотного стенда 3. При этом АТС 2 позиционируют с расположением его геометрического центра на геометрической оси вращения поворотного стенда 3
Компьютер 8, для целей испытаний навигационной системы, устанавливают в экранированном помещении 12 и заблаговременно оснащают софтом, обеспечивающим возможность обработки навигационных параметров, принятых приёмником 10 навигационной системы, и вычисления критериев их соответствия регламентирующим требованиям. При этом помехозащищённую линию 7 связи заблаговременно формируют с возможностью коммутации компьютера 8 и приёмника 10 навигационной системы как на этапе калибровки выходной мощности генератора 6 имитатора, так и на этапе испытаний навигационной системы и её конфигурации в составе АТС 2.
Угломестную направляющую 5 заблаговременно формируют и располагают в безэховой камере 1 с возможностью позиционирования антенны 4 имитатора в любой точке дуги геометрического кругового сектора, радиус которого (r) больше максимального линейного размера испытываемого АТС 2, плоскости которого принадлежит геометрическая ось вращения поворотного стенда, а также с возможностью эквидистантного, в диапазоне зенитных углов от от 00 до 900, расположения антенны имитатора относительно геометрического центра гипотетически установленного на поворотном стенде АТС.
В процессе испытаний используют генератор 6 и антенну 4 имитатора излучения группировки спутников выполненные с возможностью формирования в безэховой камере 1 электромагнитных сигналов, имитирующих собой сигналы спутниковых радионавигационных систем. При этом антенну 4 имитатора установливают на угломестной направляющей 5, а генератор 6 сигналов имитатора располагают в экранированном помещении 12 и соединяют с антенной 4 имитатора посредством соответствующей линии связи (на Фиг. 1…Фиг. 4 показана графически).
Компоновочные решения бортовых навигационных систем АТС предполагают конкретное заданные места расположения их элементов; навигационные системы могут содержать только одну приемную антенну, которая может располагаться как на крыше АТС, так и в салоне. При этом элементы АТС, например, обогреваемые стекла, или металлические стойки, могут играть роль электромагнитных экранов, ослабляющих навигационные сигналы спутников.
Заявляемый способ испытаний навигационных систем АТС основан на создании в безэховой камере электромагнитных сигналов, имитирующих собой сигналы видимых, в поэтапно варьируемых направлениях, группировок навигационных спутников, и на оценке, на каждом из этапов, точности определения местоположения АТС установленным на АТС приемником навигационной системы. В процессе испытаний выявляют направления позиционирования антенны 9 имитатора (видимых группировок спутников), по которым происходит критическое затухание навигационного сигнала, и расположенный в АТС приемник навигационной системы не может учитывать получаемые данные для расчета, с заданной точностью, местоположения АТС. Исходя из количества таких направлений, и производится комплексная оценка качества определения местоположения АТС.
Навигационная система, интегрированная в АТС, считается удовлетворяющей нормативным требованиям, если величина комплексного показателя точности определения местоположения, характеризующего собой площадь сферического сегмента в пределах которого осуществим уверенный приём навигационного сигнала, больше или равна величине предельного показателя, что физически соответствует высокой вероятности приема сигналов от необходимого количества навигационных спутников для определения местоположения с заданной точностью.
Испытания, в их наиболее полном объёме, проводят следующим образом:
1. Задают предельный показатель Pпр и предельный навигационный параметр Sпр, определяемые, как правило, из технической документации. Например, Pпр = 0,8, а Sпр, например, HDOP = 1, что соответствует (HDOP) точности позиционирования 15 м.
2. Перед проведением испытаний навигационной системы, интегрированной в АТС 2, выполняют калибровку выходной мощности генератора 6 имитатора при круговой поляризации излучающих сигнала (уровня навигационных сигналов), которая заключается:
2.1 - В установке навигационной системы на диэлектрическом столе 11, размещённом в безэховой камере 1, с расположением антенны 9 приёмника 10 навигационной системы в геометрическом центре гипотетически установленного на поворотном стенде 3 АТС 2, в соединении приёмника 10 навигационной системы с антенной 9 навигационной системы и, посредством помехозащищенной линии 7 связи, с компьютером 8.
2.2. В установке антенны 4 имитатора на угломестной направляющей 5 с расположением антенны 4 имитатора, относительно антенны 9 навигационной системы, в зенитном угле Θ = 00 и на расстоянии r, а также в соединении антенны 4 имитатора с генератором 6 имитатора. Где величина r больше максимального линейного размера АТС 2 (задана позиционированием угломестной направляющей относительно геометрической оси вращения поворотного стенда) и равна радиусу дуги геометрического кругового сектора (задан конструктивом угломестной направляющей 5), величина которого выбрана из условия обеспечения равно удалённости антенны 4 имитатора, относительно геометрического центра гипотетически установленного на поворотном стенде 3 АТС 2, для всех контекстуально возможных позиций антенны 4 имитатора на угломестной направляющей 5.
2.3. После завершения монтажных работ, предшествующих калибровке, навигационную систему переводят в режим приёма навигационных сигналов, компьютер 8 в режим обработки параметров, принятых приёмником 10 навигационной системы, а генератор 6 имитатора настраивают на режим имитации сигналов навигационных спутников. В процессе калибровки при круговой поляризации излучающих сигнала настраивается и запоминается мощность сигнала и количество спутников, при которых навигационный параметр S (например, HDOP или VDOP), вычисляемый навигационным приемником 10, соответствует условию S < Sпр.
3. После завершения калибровки, навигационную систему штатно устанавливают в испытуемое АТС 2, которое, в свою очередь, размещают на поворотном стенде 3 безэховой камеры 1 с расположением геометрического центра испытываемого АТС 2 на геометрической оси вращения поворотного стенда 3. Антенну 4 имитатора, как и в процессе калибровки, размещают на угломестной направляющей 5 безэховой камеры 1, установленной с возможностью расположения антенны 4 имитатора на расстоянии r от геометрического центра испытываемого АТС 2, для всех контекстуально возможных позиций антенны 4 имитатора на угломестной направляющей 5.
3.1. Вращением поворотного стенда 3 (азимутальным позиционированием испытываемого АТС 2 в диапазоне углов от 00 до 3600, относительно угломестной направляющей 5, размещением антенны 4 имитатора на угломестной направляющей 5 (зенитным, в диапазоне углов от 00 до 900, и эквидистантным, на расстоянии r, позиционированием антенны 4 имитатора, относительно геометрического центра испытываемого АТС 2, обеспечивают возможность позиционирования антенны 4 имитатора в любой точке верхней виртуальной полусферы (в телесном угле 00 - 1800) радиуса r.
На сферическом сегменте телесного угла 1700 верхней виртуальной полусферы, расположенной над испытываемым АТС 2, задают, в зенитных и азимутальных углах, множество точек позиционирования антенны 4 имитатора по отношению к АТС 2. Для каждого зенитного угла задают множество азимутальных углов позиционирования в диапазоне от 00 до 3600, например, с шагом 100; зенитные углы задают в диапазоне от 00 до 900, например, с шагом 100.
4. В каждой из заданных точек позиционирования антенны имитатора по отношению к АТС 2 осуществляют определение навигационных параметров, для чего навигационную систему переводят в режим приёма навигационных сигналов, компьютер 8 в режим обработки параметров, принятых приёмником 10 навигационной системы, а генератор 6 и антенну 4 имитатора в режим трансляции калиброванных по мощности сигналов, имитирующих собой сигналы навигационных спутников;
Для каждого конкретного позиционирования АТС 2, относительно антенны 4 имитатора, измеряют навигационный параметр и для всех заданных позиций (точек позиционирования излучающей антенны по отношению к АТС) формируют массив данных.
4.а. Если в техническом задании указано проведение испытаний в условиях воздействия внешних электромагнитных помех, то во всех точках позирования антенны 4 имитатора, испытания выполняют при воздействии электромагнитных помех с заданными технической документацией параметрами, формируемыми посредством антенны 13, известным образом расположенной в безэховой камере 1.
6. По результатам испытаний вычисляют комплексный показатель точности определения местоположения Р, который определяют из выражения:
, где
N – полное количество мест позиционирования антенны, излучающей навигационные сигналы на сферическом сегменте виртуальной полусферы;
– точка на сферическом сегменте виртуальной полусферы, определяющая конкретное место позиционирования антенны, излучающей навигационные сигналы;
φi
[00; 3600] – азимутальный угол позиционирования;
Θj [00; 900] – зенитный угол позиционирования;
r – радиус сферического сегмента виртуальной полусферы, задан расположением и ориентацией угломестной направляющей относительно геометрической оси вращения поворотного стенда, а также геометрическими параметрами угломестной направляющей, предопределяющими множество возможных точек позиционирования антенны имитатора на угломестной направляющей;
S – навигационный параметр, например, HDOP или VDOP;
Sпр – предельный навигационный параметр;
K ≤ N – количество мест позиционирования антенны, излучающей навигационные сигналы на сферическом сегменте, где выполняется условие S ≤ Sпр.
7. Оценку качества навигационного приёмника АТС осуществляют на основе сопоставления результата Р комплексной оценки параметров точности определения местоположения навигационной системы, интегрированной в АТС, с заданным, в нормативной технической документации, предельным показателем Рпр, характеризующим собой достаточный уровень качества работы навигационной системы, интегрированной в АТС:
- В случае, если условие Р ≥ Рпр выполнено, делают заключение о соответствии интегрированной в АТС 2 навигационной системы нормативным требованиям.
- В случае, если условие Р ≥ Рпр не выполнено, делают заключение о несоответствии нормативным требованиям интегрированной в АТС 2 навигационной системы, а также принимают меры по обеспечению указанного соответствия, например, изменяют место установки антенны 9 приемника 10 навигационной системы.
Предлагаемый в изобретении способ испытаний навигационных систем, установленных на АТС, позволяет производить объективную оценку степени влияния конфигурации АТС на качество работы размещённой в АТС навигационной системы; предлагаемый способ обеспечивает проведение испытаний навигационных систем, в том числе, и в условиях действия внешних электромагнитных помех;
В случае выявления несоответствия нормативным требованиям качества интегрированной в АТС навигационной системы изобретение обеспечивает возможность своевременной доработки АТС и/или навигационной системы до уровня нормативных требований.
Изобретение относится к испытаниям аппаратуры потребителей сигналов спутниковых радионавигационных систем, входящей в состав автотранспортных средств. Перед началом испытаний АТС с установленной в АТС навигационной системой выполняют калибровку выходной мощности генератора имитатора навигационных сигналов, для чего в центр поворотного стола безэховой камеры устанавливают диэлектрический стол, на котором размещают приемник и антенну испытываемой навигационной системы, антенну имитатора сигналов спутниковых радионавигационных систем размещают на угломестной направляющей в зенитном угле Θ = 0° и на регламентированном расстоянии (r), а затем настраивают и запоминают мощность сигнала и количество спутников, при которых навигационный параметр, вычисляемый приемником навигационной системы, меньше предельного навигационного параметра. После проведения калибровки выходной мощности генератора имитатора навигационных сигналов в центр поворотного стола устанавливают АТС с штатно установленными приемником и антенной испытываемой навигационной системы. На сферическом сегменте телесного угла 170° виртуальной полусферы, расположенной над АТС с тестируемой навигационной системой, задают, в зенитных и азимутальных углах, некоторое множество точек расположения антенны имитатора по отношению к АТС, в каждой из которых осуществляют подачу на антенну имитатора калиброванных по мощности сигналов генератора имитатора и определение приёмником навигационной системы навигационных параметров. Оценку качества работы навигационной системы осуществляют на основе комплексной оценки полученного в результате испытаний массива параметров точности определения местоположения навигационной системы. Способ испытаний обеспечивает комплексную оценку точности определения местоположения АТС, в том числе и в условиях действия внешних электромагнитных помех, с учетом особенностей компоновки навигационной системы в АТС. 4 ил.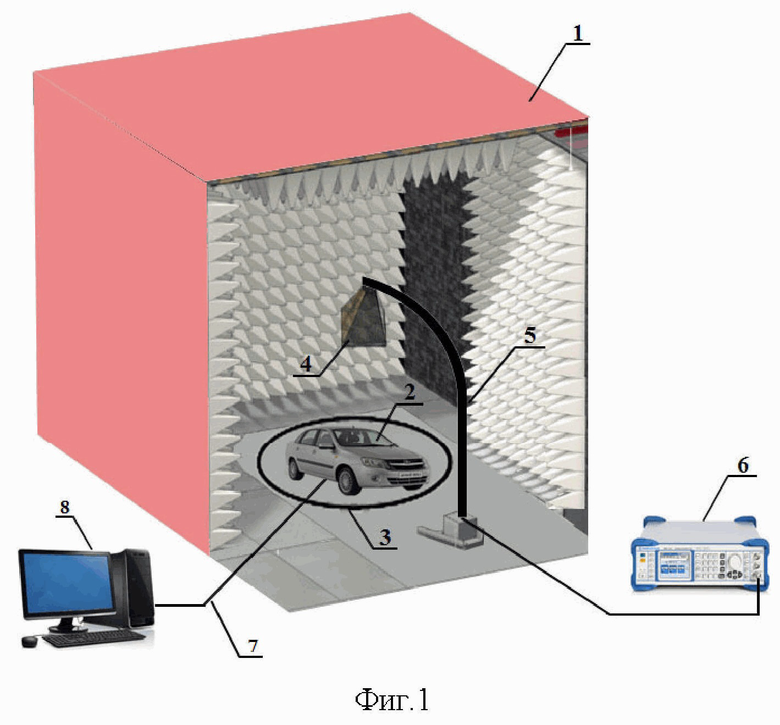
Способ испытаний навигационных систем автотранспортных средств, в котором испытуемое автотранспортное средство, оснащённое навигационной системой, включающей в себя приёмник и антенну, размещают на поворотном стенде электромагнитной безэховой камеры, содержащей в своём составе имитатор излучения группировки спутников, включающий в себя антенну имитатора и генератор сигналов имитатора, а также угломестную направляющую антенны имитатора, изменяя в азимутальной плоскости ориентацию автотранспортного средства, а в угломестной плоскости ориентацию антенны имитатора, испытуемое автотранспортное средство подвергают воздействию электромагнитных сигналов, формируемых антенной и генератором имитатора, по результатам испытаний производят оценку качества навигационного приёмника автотранспортного средства, отличающийся тем, что в процессе испытаний используют имитатор, генератор и антенна которого выполнены с возможностью формирования электромагнитных сигналов, имитирующих собой навигационные сигналы группировки спутников, при этом генератор имитатора устанавливают в защищенном от внешних факторов месте, преимущественно, в экранированном помещении, в процессе испытаний используют угломестную направляющую антенны имитатора, выполненную с возможностью перемещения антенны имитатора по дуге геометрического кругового сектора, радиус которого больше максимального линейного размера автотранспортного средства, плоскости которого принадлежит геометрическая ось вращения поворотного стенда, а также с возможностью эквидистантного расположения антенны имитатора относительно геометрического центра гипотетически установленного на поворотном стенде автотранспортного средства, в процессе испытаний используют оснащённый специализированным программным обеспечением компьютер, выполненный с возможностью обработки навигационных параметров, принятых приёмником навигационной системы испытуемого автотранспортного средства, и вычисления критериев их соответствия регламентирующим требованиям, при этом компьютер устанавливают в защищенном от внешних факторов месте, преимущественно, в экранированном помещении, а также с возможностью соединения компьютера и приёмника навигационной системы испытуемого автотранспортного средства посредством помехозащищенной линии связи, перед началом испытаний навигационной системы, интегрированной в автотранспортное средство, приёмник и антенну навигационной системы размещают на диэлектрическом столе, предварительно установленном на поворотном стенде безэховой камеры, при этом антенну навигационной системы располагают в геометрическом центре гипотетически установленного на поворотном стенде автотранспортного средства, а антенну имитатора располагают на угломестной направляющей с расположением антенны имитатора, относительно антенны навигационной системы, в зенитном угле 0°, антенну имитатора соединяют с генератором имитатора, а приёмник навигационной системы с антенной навигационной системы и, посредством помехозащищенной линии связи, с компьютером, после завершения установки навигационной системы и антенны имитатора выполняют калибровку выходной мощности генератора имитатора при круговой поляризации излучающих сигнала, для чего навигационную систему переводят в режим приёма навигационных сигналов, компьютер в режим обработки параметров, принятых приёмником навигационной системы, а генератор имитатора в режим имитации сигналов навигационных спутников, в процессе калибровки настраивают и запоминают мощность сигнала и количество спутников, при которых навигационный параметр, вычисляемый навигационным приемником соответствует условию S < Sпр, где
S – навигационный параметр, например, HDOP или VDOP,
Sпр – предельный навигационный параметр,
после завершения калибровки выходной мощности генератора имитатора, навигационную систему устанавливают в автотранспортное средство, которое, в свою очередь, размещают на поворотном стенде безэховой камеры, на сферическом сегменте телесного угла 170° виртуальной полусферы, характеризуемой множеством точек возможного позиционирования антенны имитатора на угломестной направляющей и множеством возможных, относительно угломестной направляющей, положений расположенного на поворотном стенде автотранспортного средства, в соответствии с планом испытаний задают, в зенитных и азимутальных углах, некоторое множество точек расположения антенны имитатора по отношению к автотранспортному средству, в каждой из заданных точек позиционирования антенны имитатора по отношению к автотранспортному средству осуществляют определение навигационных параметров, для чего навигационную систему переводят в режим приёма навигационных сигналов, компьютер - в режим обработки параметров, принятых приёмником навигационной системы, а генератор и антенну имитатора - в режим трансляции калиброванных по мощности сигналов, имитирующих собой сигналы навигационных спутников, оценку качества работы приёмника навигационной системы автотранспортного средства осуществляют на основе комплексной оценки параметров точности определения местоположения навигационной системы, интегрированной в автотранспортное средство, определяемой из критерия:
Р ≥ Рпр, где
Рпр – предельный показатель, характеризующий достаточное качество работы навигационной системы, интегрированной в автотранспортное средство, и задаваемый в технической документации на разработку автотранспортного средства,
Р – комплексный показатель точности определения местоположения, определяемый из выражения:
 , где
, где
N – полное количество мест позиционирования антенны, излучающей навигационные сигналы на сферическом сегменте виртуальной полусферы,
 – точка на сферическом сегменте виртуальной полусферы, определяющая конкретное место позиционирования антенны, излучающей навигационные сигналы,
– точка на сферическом сегменте виртуальной полусферы, определяющая конкретное место позиционирования антенны, излучающей навигационные сигналы,
φi
 [0°; 360°] – азимутальный угол позиционирования,
[0°; 360°] – азимутальный угол позиционирования,
Θj [0°; 90°] – зенитный угол позиционирования,
r – радиус сферического сегмента виртуальной полусферы,
S – навигационный параметр, например, HDOP или VDOP,
Sпр – предельный навигационный параметр,
K ≤ N – количество мест позиционирования антенны, излучающей навигационные сигналы на сферическом сегменте, где выполняется условие S ≤ Sпр.
| Замкнутый регистр сдвига на магнитных элементах с прямоугольной петлей гистерезиса | 1958 |
|
SU119893A2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ВОЗМОЖНОСТИ ТЕСТИРОВАНИЯ УЗЛА СВЯЗИ | 2016 |
|
RU2698318C1 |
| СИСТЕМА ИМИТАЦИИ ЭЛЕКТРОМАГНИТНОЙ ОБСТАНОВКИ С СЕТЬЮ ИЗ МНОЖЕСТВА ЗОНДОВ | 2011 |
|
RU2543557C2 |

