ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к автоматической модульной системе для манипулирования вертикальными фермами, в целом гидропонного, аэропонного или аквапонного типа.
Более конкретно, изобретение относится к автоматической модульной системе для манипулирования так называемыми "вертикальными фермами", используемыми для беспочвенного выращивания растений. Настоящее изобретение описывается ниже со ссылкой на гидропонную систему, что, однако, не исключает другие способы беспочвенного выращивания, которые могут быть упомянуты отдельно при установлении различий между технологией конструкции, которая может быть использована. Система согласно изобретению состоит из множества модульных блоков хранения с вертикальным и четырехугольным расположением в плане, каждый из которых содержит множество уровней, в которых расположены лотки с возможностью скольжения на направляющих, причем каждый лоток может быть отдельно забран подвижным управляющим манипуляционным блоком системы, позволяющим наполнять и забирать растения или продукты гидропоники, содержащиеся в каждом лотке.
Автоматическая модульная система манипулирования вертикальными фермами согласно изобретению предназначена для решения проблем, возникающих при использовании традиционных вертикальных ферм, т.е. проблем, возникающих вследствие трудностей при манипулировании гидропонной системой с культурами, расположенными на различных уровнях с вертикальной протяженностью внутри каждого модуля.
Настоящее изобретение предпочтительно применяется в области систем для манипулирования вертикальными фермами, используемыми для гидропонного или аэропонного и аквапонного выращивания.
УРОВЕНЬ ТЕХНИКИ
Известна новая разработка так называемых вертикальных ферм, т.е. вертикального выращивания, основанного на гидропонной технологии, прерогативой которой является развитие роста растений в специальных условиях, некоторые из которых перечислены ниже:
- возможность не использовать почву;
- эксплуатация вертикального объема;
- возможность внутренних ферм;
- уменьшение использования воды до 80%;
- большая производительность;
- исключение использования удобрений и пестицидов;
- исключение рассеивания веществ в почве с последующим вовлечением водоносного горизонта;
- реконструкция заброшенных зданий;
- продукция от местных производителей;
- непрерывное выращивание 365 дней в году, независимо от времени года.
В целом, под гидропонным выращиванием понимается реализация одного из способов беспочвенного выращивания, в котором почва заменяется инертным субстратом, таким как вспученная глина, перлит, вермикулит, кокосовое волокно, каменная вата, цеолит и т.д., то есть в том числе и аэропонные и аквапонные способы.
Растение орошается питательным раствором, состоящим из воды и соединений (в основном неорганических в случае гидропоники или аэропоники, тогда как они являются органическими или смешанными в случае аквапоники), нужных для обеспечения всех необходимых элементов для нормального минерального питания. Данный способ также известен под термином «водная культура». Гидропонное выращивание позволяет контролировать продукцию как с точки зрения качества, так и гигиены/санитарии в течение всего года.
Система гидропонного вертикального выращивания основана на том, что культуры расположены на различных этажах или уровнях, с вертикальной протяженностью самих культур.
Преимущества очевидны. Целевое производство позволяет в короткие сроки осуществлять поставки рядом с пользователем, без пестицидов и химических удобрений, обеспечивает возможность целевого использования воды и возможность ведения сельского хозяйства круглый год, даже в ограниченных или перестроенных пространствах, помимо защиты водоносного горизонта, защищенного системой гидропонного выращивания.
По этим причинам ферма такого типа постоянно приобретает все большее значение.
Некоторые из данных гидропонных ферм работают с использованием солнечного света, однако в этом случае сроки получения продукции зависят от погоды, тогда как в других случаях системы используются с осветительными приборами, в последнее время как правило с использованием светодиодных технологий самого последнего поколения и централизованных оросительных систем, распределенных по всей ферме.
Осветительные системы выполнены так, что плантации получают весь спектр фотонов, который необходим им для роста, и модулируются с использованием временных шкал и алгоритмов, взятых из опыта и времен выращивания для каждого типа культуры.
Оросительная система позволяет создать сортировочный центр для сортировки питательных жидкостей (воды и минеральных солей), проходящих через всю плантацию (сотни метров или километров труб), так что каждое растение получает свою дозу питательных веществ. Теоретически все культуры должны получать одинаковое питание, однако нет уверенности, что эта цель может быть безусловно достигнута для всех растений.
Размещение культур осуществляется с вертикальным расположением и с ограничениями по высоте в том случае, если сбор урожая должен быть выполнен вручную, причем при уборке урожая могут быть достигнуты высоты нескольких метров посредством самоходных погрузчиков с возможностью регулировки высоты.
Содержащие продукты лотки размещены на полках, сходных с теми, которые используют на складах хранения товаров в логистических центрах.
В целом, системы гидропонного выращивания, даже вертикальные системы, позволяют уменьшить потребление воды, особенно с закрытыми системами, которые восстанавливают не используемый растениями питательный раствор и перерабатывают его с соответствующей экономией воды до 80-90% по отношению к обычному выращиванию на почве.
Кроме того, такие фермы приводят к эффективному использованию удобрений и улучшению управления питанием растений, а также к лучшему контролю фитосанитарных условий: поскольку больше не имеется связи с почвой, уменьшается, если не устраняется, возникновение заболеваний, распространяемых почвой и паразитами, обычно присутствующими в почве.
Кроме того, гидропонное выращивание, также вертикального типа, устраняет необходимость борьбы с сорняками.
Опять же, беспочвенные системы могут быть эффективно использованы в сухих окружающих средах и климате, поскольку они обеспечивают сокращение отходов и потерь воды и питательных веществ, что, таким образом, приводит к уменьшению воздействия на окружающую среду, также связанного с крайне ограниченным использованием средств защиты растений и средств борьбы с сорняками.
Проблема, с которой сталкиваются при использовании традиционных гидропонных ферм с вертикальной протяженностью, заключается в сложности обработки культур, расположенных на разных уровнях, в частности находящихся на более высоких уровнях, для достижения которых требуются лестницы, или в некоторых случаях для механизации системы также используются самоходные средства, такие как погрузчики или погрузчики с вильчатым захватом.
Использование такого оборудования также привлекло особое внимание к проблематичной обработке культур, размещенных на более высоких уровнях, поскольку механизированные системы также не позволяют осуществлять непосредственный контроль над культурами и их обработку.
Кроме того, для ферм с вертикальной протяженностью, выполненных внутри закрытых окружающих сред, часто используемые элементы колонн подвергаются ограничениям по высоте, определяемым высотой этажей внутри зданий, в которых образованы фермы. Отсутствие модульности известных систем не допускает гибких решений, при этом часто необходимо сносить полы внутри зданий для размещения элементов колонн в определенных положениях.
В области техники также известны решения, раскрытые в документах WO2017/024353 и US2015/0282437. Данные решения предусматривают использование колонных элементов, имеющих различные полки, на которых расположены контейнеры, используемые для выращивания растений; однако такие решения не относятся к модульному типу, поскольку они не предусматривают возможность добавления дополнительных соединяемых друг с другом элементов колонн путем последовательного объединения из лотков, которые должны достигать каждой полки каждого элемента для изменения их размещения как внутри отдельных элементов, так и между одним элементом и другим элементом.
Таким образом, отсутствие реальной модульности из-за отсутствия расширяемых конструкций, поддерживающих взаимное соединение, ограничивает возможности использования таких систем, изготовленных с определенными размерными характеристиками, которые не могут быть дополнительно модифицированы в тех случаях, когда требуется расширить фермы.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на развитие возможности механизации и автоматизации гидропонного производства, также, в частности, с использованием конструкций с вертикальным расположением.
Фактически, одна из задач изобретения заключается в введении новой системы для перемещения и манипулирования специальными загрузочными и разгрузочными блоками гидропонной вертикальной фермы с вертикальными модульными элементами, которая будет способна использовать тот же самый блок перемещения, приспособленный для обслуживания множества модулей, с устранением или значительным уменьшением отмеченных выше недостатков.
Изобретение, в частности, направлено на создание перемещающей и манипулирующей системы для конструкций, используемых для гидропонных ферм, в частности ферм с вертикальным расположением, в которых не требуется проектирование, а только интеграция дополнительных стандартных компонентов, позволяющих расширить саму модульную систему.
Кроме того, перемещающая и манипулирующая система для конструкций, используемых для гидропонных ферм, в частности ферм с вертикальным расположением согласно изобретению, позволяет заменять лотки модулей в поперечном направлении, что, благодаря свободному расположению различных модулей, позволяет "проектировать" формы или заполнение доступного пространства любым требуемым способом.
Очень важной функцией перемещающей системы для манипулирования модульными конструкциями, используемыми для гидропонных ферм, в частности ферм с вертикальным расположением согласно изобретению, является независимость работы каждого вертикального модуля. Фактически, в случае, когда внутри системы происходит перемещение полок, подъемники, которые используются для забора и перемещения самих полок, и которые могут работать параллельно с операциями перемещения, определяют чистый прирост эффективности работы.
Это достигается с помощью перемещающей и манипулирующей системы для конструкций, используемых для гидропонных ферм, в частности ферм с вертикальным расположением, согласно изобретению, характеристики которой описаны в независимом пункте формуле изобретения.
В зависимых пунктах формулы изобретения настоящего решения раскрыты предпочтительные варианты осуществления изобретения.
Основные преимущества системы согласно настоящему изобретению относятся к возможности использования модульных конструкций, используемых для гидропонных ферм, которые могут оставаться отдельными или могут быть модульно соединены с другими идентичными модульными конструкциями, используемыми для гидропонных ферм того же типа, с применением концепции модульности, обеспечивающей возможность постепенного роста системы в соответствии с требованиями.
В отличие от других известных систем, перемещающая манипулирующая система для конструкций, используемых для гидропонных ферм согласно изобретению, позволяет улучшить заполнение объема участков, в которых они установлены.
Система согласно изобретению опционально позволяет осуществлять визуальное управление с помощью электронных поисков и систем наблюдения.
Кроме того, согласно изобретению предусмотрено, что расположение модульных конструкций, используемых для гидропонных ферм, может быть выполнено так, чтобы как можно лучше заполнять горизонтальное пространство, с созданием свободных форм относительно положений сопряжения или с созданием почти полного заполнения доступного пространства, с созданием объемов, позволяющих непрерывно добавлять модули, с оптимизацией, таким образом, занимаемой площади поверхности.
Благодаря тому, что модули, составляющие систему согласно изобретению, могут заменять лотки на любой высоте, также может быть предусмотрен модуль для замены, позволяющий транспортировать лотки внутри многоуровневого здания, гарантируя при этом непрерывность системы и без необходимости удаления полов между одним уровнем здания и следующим уровнем.
За счет использования системы согласно изобретению может быть предусмотрено, чтобы каждый модуль имел ограниченные оросительные зоны для предотвращения распределения по всей системе, что потребовало бы очень длинного трубопровода.
Фактически система гидропонного выращивания согласно изобретению предусматривает создание зон с модулями, оснащенными различными типами ламп определенного типа для излучения определенного светового спектра, что позволяет, благодаря возможности перемещения лотков, содержащих культуры, подвергать их различным циклам воздействия.
Согласно изобретению предусмотрено, что некоторые зоны модуля могут быть исключены из системы светового излучения, чтобы обеспечить цикл в темноте без выключения ламп, но путем перемещения лотков внутрь темных зон.
Это позволяет экономить на осветительных элементах.
Возможность перемещения культур в лотках также позволяет расположить их на расстоянии, с использованием шагов определенной высоты, от источников излучения, что позволяет изменять условия поглощения.
В некоторых конфигурациях модулей может быть предусмотрено наличие систем кондиционирования для воздушной среды и, таким образом, управление такими параметрами, как влажность и состав воздуха.
Информационная система системы согласно изобретению, основанная на нейронных алгоритмах свойств, позволяет активировать систему машинного обучения и глубокого обучения, т.е. интеллектуальное управление, которая может постепенно снабжать базу данных системы, предоставляя информацию о наилучших ожидаемых циклах, или активировать в случае различных типов культур.
Поскольку положение каждого выращиваемого отдельного растения известно, известны все характеристики от посева до сбора урожая, сколько оно поглотило питательных веществ, света и т.д.
Таким образом, каждое растение можно контролировать с полной отслеживаемостью.
Что касается посева, конструкция, используемая для манипулирования гидропонными фермами с одним или более отдельными вертикальными модулями согласно изобретению, может быть автоматизирована всякий раз, когда требуются различные типы культур.
Такая автоматизация, управляемая информационной системой, позволяет отслеживать будущий продукт, подлежащий выведению на рынок, непосредственно с этапа посева, поскольку в случае использования ранее введенных контейнеров или посева известны координаты распределения и физическое положение внутри системы лотков, вставленных внутрь модульной системы, поскольку они уникальны.
Это подразумевает значительное уменьшение гидравлической части каждой системы, с возможностью дифференциации типа добавок, подлежащих введению в подаваемую жидкость, и даже с возможностью дифференциации их количества и состава с различением каждого отдельного растения, с учетом того, что координаты известны; в течение выращивания может быть добавлена информация, относящаяся к тому, сколько воды получило растение с известным идентификатором, к количеству добавок, частоте опрыскивания и т.д.
Также предусмотрено наличие одной или более камер, расположенных в зоне модуля, которые запоминают статус растений в лотках. Информационная управляющая система рассматривает статус каждого растения, сравнивает его с предыдущими изображениями, с изображениями растений со сходными характеристиками (тип, культура, время) и оценивает состояние его здоровья.
Таким образом, могут быть активированы корректирующие действия для роста растений, а также обеспечена возможность историзации различных комбинаций состава питания, облучения светом, времен или тому подобного, что позволяет варьировать процесс роста и обеспечивает непрерывную оптимизацию.
Все это переводится в постоянный источник данных и изображений каждого отдельного растения, причем такие данные могут сохраняться до конца отслеживаемости продукта.
Таким образом, для отслеживаемости или для изучения и оптимизации, помимо предыдущих идентификационных данных растения в информации также могут быть сохранены время облучения светом, расстояния, цвета, таким образом, все переменные величины, связанные с циклами облучения светом, которым они были подвергнуты.
Также предусмотрена возможность полного удаления определенного лотка, содержащего продукты, для целей посева, введения предварительно посаженных контейнеров и сбора урожая, причем они также могут быть перемещены в другие целевые положения с помощью самоходных средств, таких как погрузчики или тому подобное.
Заявленная модульная система содержит устройство вертикальной транспортировки, снабженное опорной полкой для лотка и устройствами горизонтальной транспортировки, выполненными с возможностью передвижения указанного лотка вдоль первой горизонтальной оси от соответствующего гнезда и в направлении к нему, причем указанное гнездо расположено внутри одной из указанных боковых зон, при этом указанный первый модуль дополнительно содержит устройства вертикальной транспортировки, расположенные в указанной центральной зоне, в которой действует указанное устройство вертикальной транспортировки лотков, с взаимодействием с лотком, когда последний располагается на полке указанного устройства вертикальной транспортировки лотков, и со смещением указанного лотка вдоль второй оси (X), горизонтальной и перпендикулярной к указанной первой горизонтальной оси (Y), для выполнения непосредственной транспортировки указанного лотка по направлению к другой полке другого устройства вертикальной транспортировки второго модуля, расположенного рядом и соединенного с указанным первым модулем.
Также заявленная модульная система может содержать множество дополнительных модулей, расположенных смежно друг с другом и соединенных друг с другом так, что по меньшей мере два из них выровнены вдоль первой или второй горизонтальной оси. Каждый модуль может быть выполнен с квадратной формой, при этом каждая из указанных боковых зон и указанной центральной зоны имеет по существу одинаковые размеры в плане.
Указанные устройства вертикальной транспортировки могут содержать ролики с приводом или ремни с приводом, действующие на лоток, при этом указанная полка имеет отверстия, внутри которых указанные ролики с приводом действуют для зацепления лотка.
Заявленная система может содержать устройство, взаимодействующее между гнездами или направляющими смежных модулей и выполненное с возможностью перемещения лотка из боковой зоны одного модуля к боковой зоне смежного модуля вдоль первой горизонтальной оси. Указанное устройство может содержать пару ремней с приводом, размещенных напротив друг друга и параллельно друг другу и расположенных между соответствующими боковыми зонами смежных модулей.
Управление может быть обеспечено манипулированием с перемещением указанных лотков с помощью электронного управляющего блока, выполненного с возможностью управления перемещением устройства вертикальной транспортировки, относящегося к каждому модулю, и устройств горизонтальной транспортировки, относящихся к каждому модулю и соединяющих смежные модули.
Манипулирование и приведение в действие перемещения указанных лотков могут быть обеспечены с помощью электронного управляющего блока и/или информационной системы, снабженных запоминающим средством, в котором записаны координаты посева отдельного растения и его физическое положение, как он расположен на отдельном лотке.
Заявленная система может содержать одну или более камер, размещенных в подходящей зоне одного или более модулей, выполненных с возможностью записи состояния растений в лотках путем отправки данных в информационную систему, выполненную с возможностью обработки состояния каждого растения, сравнения его с предыдущими изображениями, с изображениями растений со сходными характеристиками, и оценки их состояния здоровья для оптимизации процесса роста отдельных растений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные характеристики и преимущества изобретения станут понятны после прочтения приведенного ниже описания варианта осуществления изобретения, представленного в качестве неограничивающего примера с помощью прилагаемых чертежей, на которых:
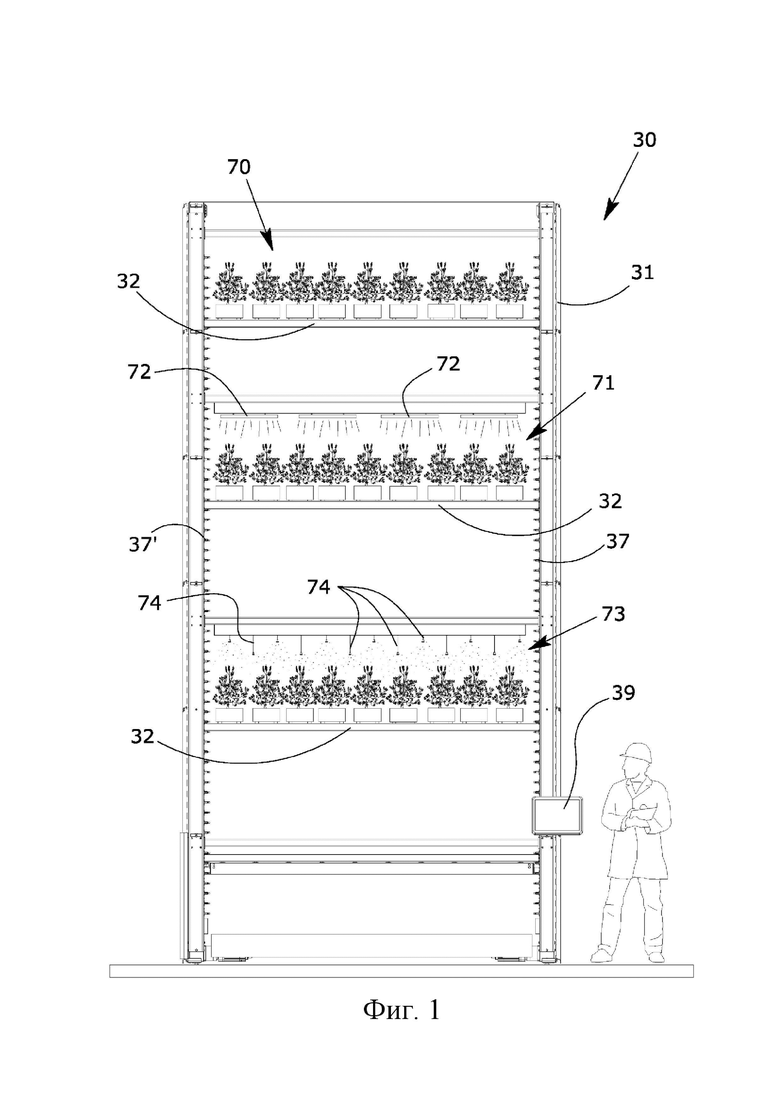
- фиг. 1 - вид сбоку, на котором показан модуль, который используется для вертикального гидропонного выращивания и относится к системе согласно изобретению, и который может быть соединен с дополнительными смежными модулями;
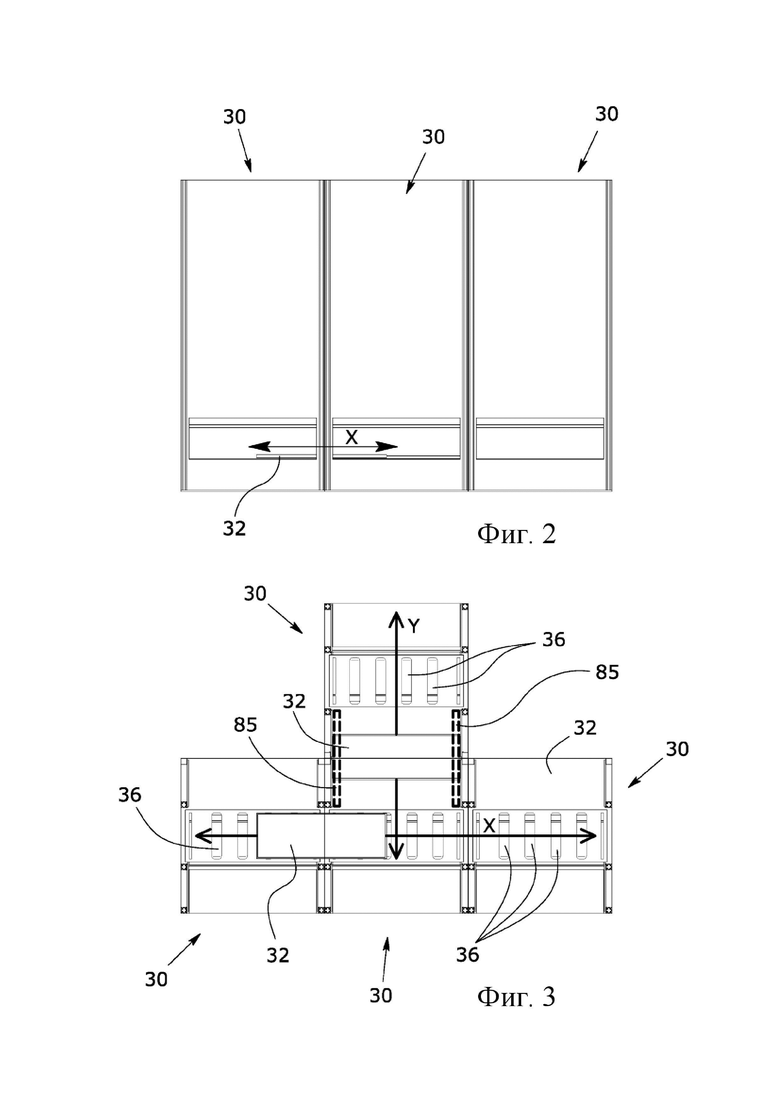
- фиг. 2 - схематический вид спереди примера системы гидропонного выращивания с множеством смежных модулей, которые могут быть расположены в соответствии с любой компоновкой и могут быть использованы в виде модульной логистической системы согласно изобретению;
- на фиг. 3 показан схематический вид сверху системы с фиг. 2;
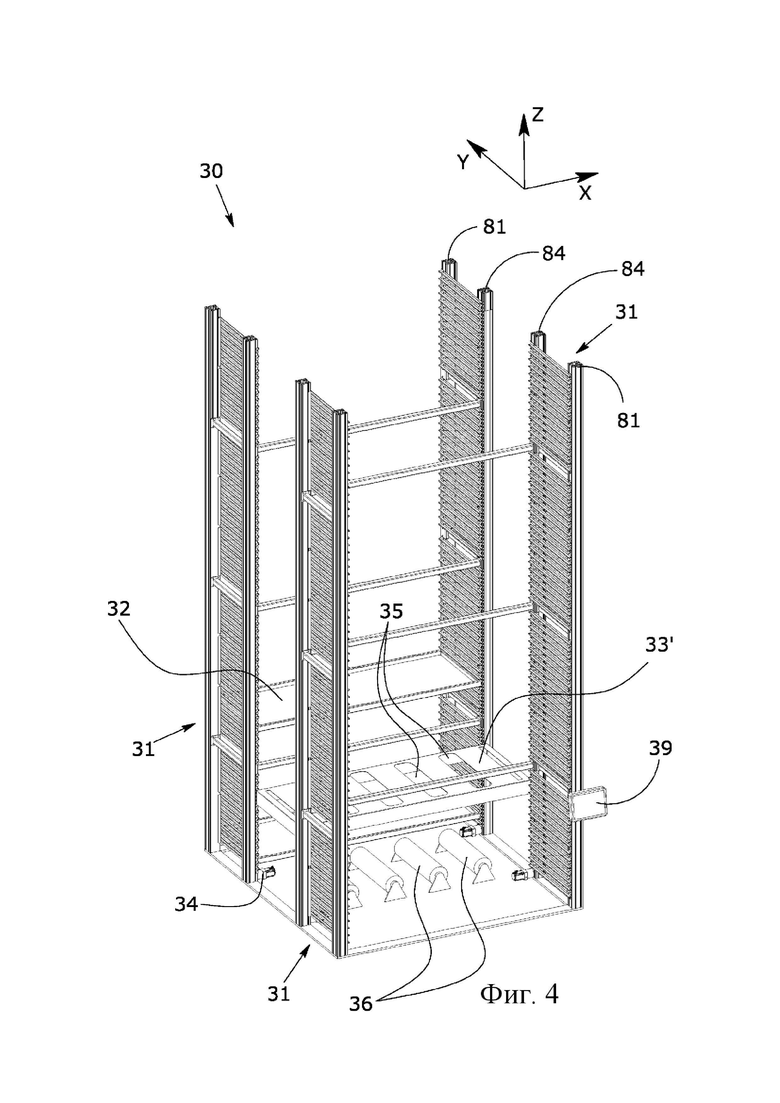
- фиг. 4 иллюстрирует схематический частично покомпонентный вид в аксонометрии модуля конструкции гидропонного выращивания, используемого в манипуляционной системе согласно изобретению;
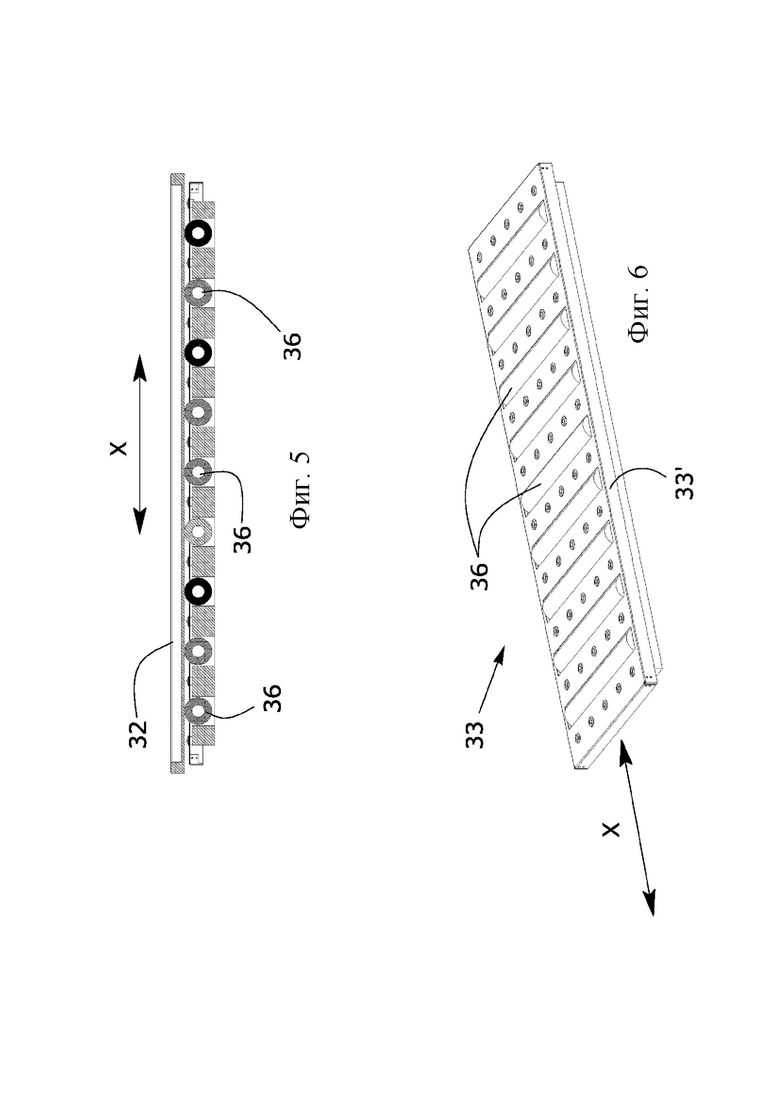
- на фиг. 5 и 6 показаны соответственно поперечный и схематический виды в аксонометрии системы для вытягивания лотков вдоль оси X, взаимодействующих с подъемным устройством, относящимся к модулю согласно настоящему изобретению;
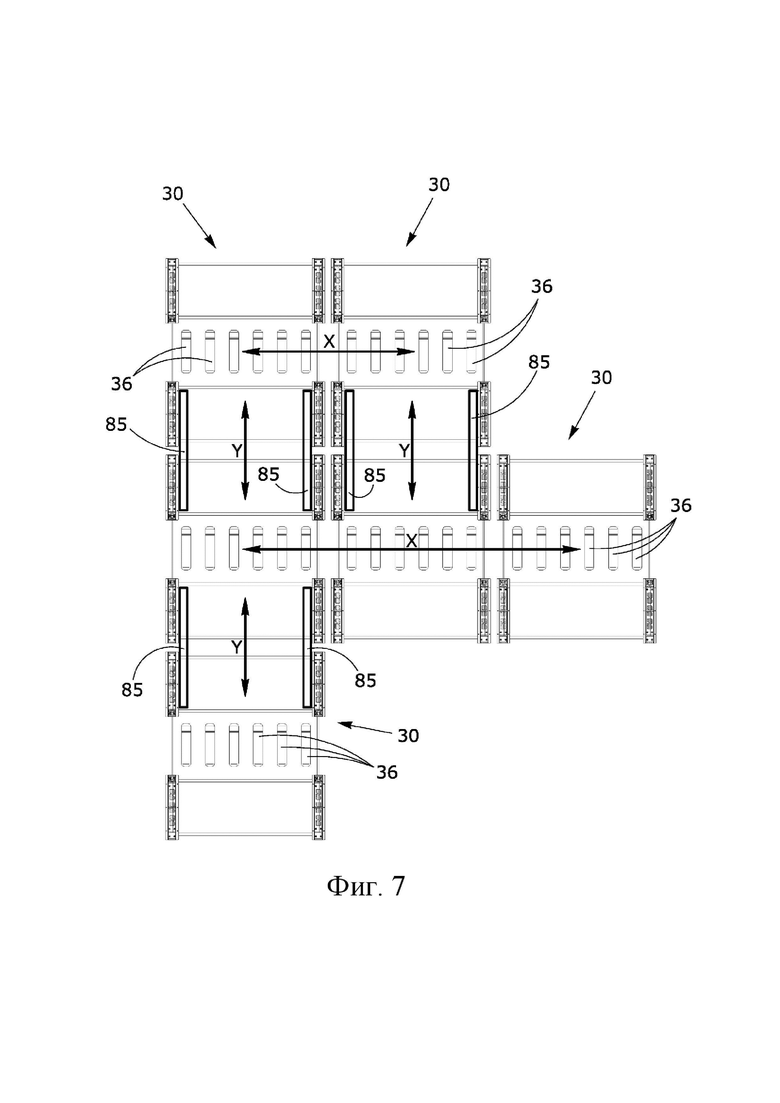
- фиг. 7 - схематический вид сверху возможной конфигурации системы для автоматического манипулирования беспочвенными культурами согласно настоящему изобретению;
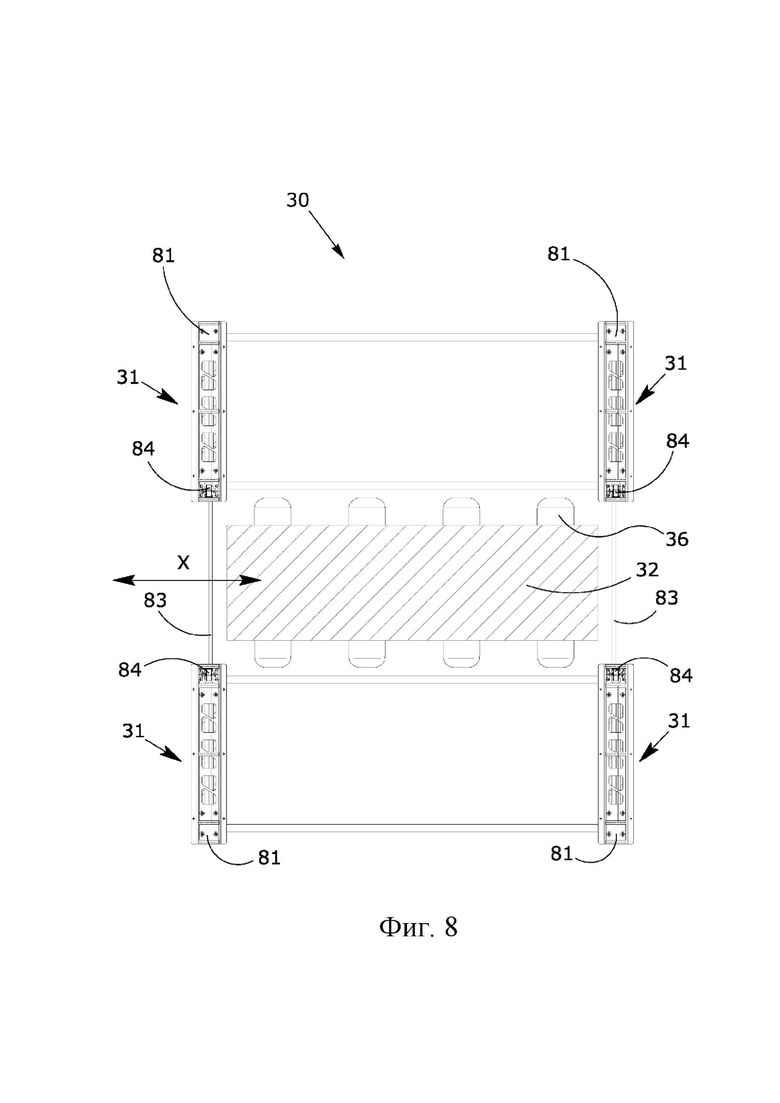
- на фиг. 8 показан вид сверху, на котором показана конфигурация поддерживающих элементов, которые были соединены с перемычками для образования модуля;
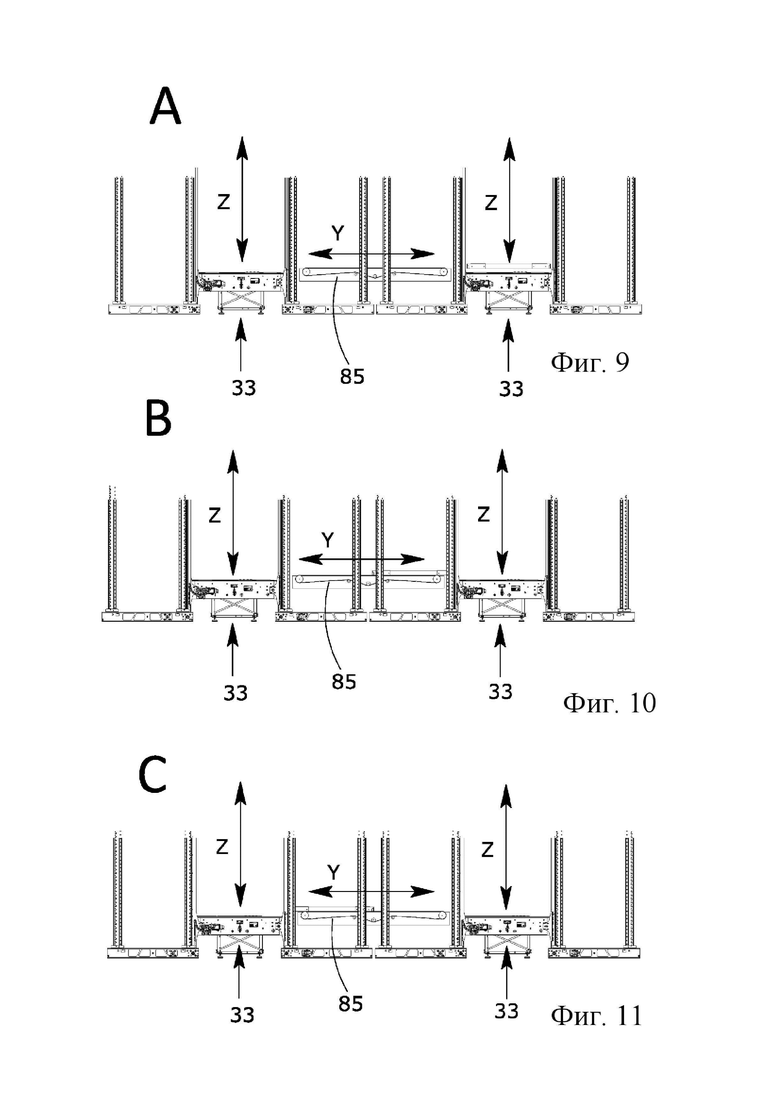
- на фиг. 9-11 показана пара соединенных в поперечном направлении модулей, имеющих устройство для боковой транспортировки лотков вдоль оси Y и вертикально вдоль оси Z.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на прилагаемые чертежи, и для начала, в частности, на фиг. 1, 2, номером позиции 30 в целом обозначен отдельный модуль конструкций, используемых для манипулирования вертикальными гидропонными фермами согласно изобретению. Указанный модуль 30 по существу имеет форму параллелепипеда с вертикальным расположением и четырехугольным сечением, с боковыми сторонами, попарно противоположными друг другу и поддерживаемыми соответствующими вертикальными поддерживающими элементами 31, которые поднимаются, начиная с нижней опорной плоскости.
Со ссылкой на фиг. 2, 3 предусмотрено, что согласно изобретению отдельный модуль 30 конструкции, используемой для вертикального манипулирования гидропонными фермами, может быть размещен рядом с другими отдельными смежными модулями 30, с образованием сети модулей, с помощью которых, посредством внутренних обменных систем, могут быть перемещены подходящие лотки 32 для вмещения растений гидропонных культур, расположенных в каждом модуле.
В частности, внутри каждого отдельного модуля 30 расположены лотки 32, содержащие культуры, которые могут быть забраны для манипулирования из любой станции и необязательно из модуля, в котором они размещены.
Более конкретно, со ссылкой на фиг. 4, каждый модуль 30 содержит четыре поддерживающих элемента 31, имеющих конструктивные боковые стороны с вертикальным расположением, которые в свою очередь имеют гнезда или горизонтальные направляющие для введения, в горизонтальном направлении (ось Y на фиг. 4), множества лотков 32, выполненных для вмещения продуктов гидропонной фермы.
Например, такие лотки содержат подходящий субстрат, на котором может расти посевная культура, или на котором могут быть расположены контейнеры, содержащие инертный и предварительно посаженный материал, расположенный в соответствии с определенной геометрией.
Конструктивные боковые стороны 31 с фиг. 4, образующие корпус лотков 32, расположены попарно напротив друг друга, при этом между ними образовано центральное пространство, в котором действует полка 33', относящаяся к устройству 33 вертикальной транспортировки (см. фиг. 9-11), расположенному на четырех шкивных ремнях или цепях, также с вертикальным расположением, и приводимому в действие посредством узлов 34 с приводом, которые могут перевести полку 33' устройства 33 вертикальной транспортировки из опущенного положения на уровне земли в приподнятое положение вблизи верхней закрывающей панели модуля 30 и наоборот.
Четыре шкивных ремня или цепи, позволяющие перемещать полку устройства 33 вертикальной транспортировки, расположены вдоль внутренних вертикальных краев каждой конструктивной боковой стороны 31 для поддержки лотков 32, т.е. они обращены к центральному отделению, в котором действует полка 33' полки 33 устройства вертикальной транспортировки. Указанное устройство 33 вертикальной транспортировки перемещается вдоль внутренней части конструкции модуля, что уменьшает пространство, занимаемое перемещающей системой. Таким образом, пространство для боковой транспортировки лотков 32 является свободным.
Таким образом, как хорошо видно на чертежах, базовый модуль системы согласно изобретению состоит из колонны в форме параллелепипеда и содержит три отдельные зоны, из которых центральная зона для перемещения полки устройства 33 вертикальной транспортировки и две боковые зоны на одной стороне и, соответственно, другой центральной зоны, имеющие опорные средства для лотков 32, вмещающих гидропонные культуры.
Согласно одному варианту осуществления полка 33' устройства 33 вертикальной транспортировки дополнительно имеет множество отверстий 35, выполненных с возможностью их перекрытия обменным устройством, содержащим соответствующие ролики 36 с приводом, которые при работе обращены к внутренней части полки 33' устройства 33 вертикальной транспортировки и превышают по высоте горизонтальную поверхность самой полки 33'.
Данное устройство позволяет устройству 33 вертикальной транспортировки достигнуть каждого лотка 32, который может быть забран из своего корпуса, загружен на устройство вертикальной транспортировки и смещен до достижения любого уровня модуля.
Когда лоток 32 забирается устройством вертикальной транспортировки и направляется на ролики 36 с приводом, последние пересекают отверстия 35 лотка 33' устройства вертикальной транспортировки, зацепляют лоток 32 и перемещают его по горизонтали в направлении смежного модуля, имеющего аналогичные ролики с приводом, до его размещения на полке устройства вертикальной транспортировки смежного модуля.
В отношении перемещения лотков 32 между центральной зоной модуля 30 и одной из боковых зон, для возможности их расположения в их собственных гнездах или забора из них, устройство вертикальной транспортировки имеет механические средства горизонтальной транспортировки для перемещения лотков по оси Y, отмеченной на чертежах, эти средства хорошо известны в данной области техники и подробно не описываются в данном документе.
Когда различные модули расположены смежно друг с другом, необязательно, чтобы все модули имели свое собственное устройство вертикальной транспортировки на одной и той же высоте, но только начальный модуль и конечный модуль должны иметь одинаковую высоту устройства вертикальной транспортировки. Таким образом, промежуточные модули могут активировать соответствующие узлы перемещения при зацеплении модулем, предшествующим им в направлении доставки.
Как показано на фиг. 5, 8, каждый модуль содержит четыре поддерживающих элемента 31, содержащих конструктивные боковые стороны, каждая из которых состоит из пар вертикальных металлических профилей 81, соединенных друг с другом конструктивными перемычками.
В центральной зоне, расположенной между этими четырьмя поддерживающими элементами 31, действует устройство 33 вертикальной транспортировки, определяющее вертикальное смещение лотков 32 (ось Z на фиг. 4).
Для перемещения устройства 33 вертикальной транспортировки на по меньшей мере одном из профилей 81 расположены кинематические средства 84 (см. фиг. 8) для перемещения устройства вертикальной транспортировки, расположенного в центральной части модуля 30 между поддерживающими элементами 31.
Как показано на фиг. 8, поддерживающие элементы 31 соединены друг с другом изначально попарно с помощью поперечин 83, а также распорок или конструктивных соединительных стержней для образования набора полок, в которых указанные поддерживающие элементы являются несущими нагрузку и поддерживают на той же стороне кинематическое устройство 84 для перемещения устройства 33 вертикальной транспортировки с ремнями или шкивами с расположением по направлению к внутренней части каждого поддерживающего элемента 31.
Таким образом получают две рамы, каждая из которых выполнена путем соединения двух поддерживающих элементов или конструктивных боковых сторон 31, которые, будучи расположенными напротив друг друга с ремнями или цепями, попарно обращенными друг к другу и расположенными на расстоянии с помощью других конструктивных элементов, позволяют реализовать конструктивный каркас модуля 30. Согласно предпочтительному варианту осуществления изобретения модуль 30 имеет квадратное сечение, причем каждая сторона имеет одинаковую длину, и разделен на три внутренние зоны с по существу одинаковой шириной, при этом центральная зона предназначена для перемещения устройства вертикальной транспортировки, а две боковые зоны - для расположения лотков 32.
Согласно данному варианту осуществления, в котором модуль 30 имеет форму квадратного сечения, модули 30 могут быть расположены сбоку и соединены друг с другом повторяющимся и модульным способом бесконечно.
Упрощенная реализация системы позволяет соединить два поддерживающих элемента 31 одной и той же стороны модуля 30 с валом передачи хода, управляемым одним приводом, возможно с соответствующим редуктором хода. Данная реализация позволяет снизить затраты на механические составляющие.
В отличие от уровня техники, каждый модуль 30 является полностью независимым и не обязательно зависит от других, поскольку он имеет свое собственное устройство 33 вертикальной транспортировки, делающее его независимым.
В системе, содержащей множество модулей, согласно настоящему изобретению каждый модуль 30 виден отдельно от других, и благодаря возможности транспортировки лотков им можно манипулировать полностью дифференцированным способом. Это не единая система, а система, которая состоит из ячеек, и в которой в каждом конкретном случае информационная управляющая система выбирает "ведущий" модуль, контролирующий общее управление.
Этим гарантируется, что в случае неисправности одного из модулей 30 другие соединенные с сетью модули не прекратят свою деятельность, что резко снижает затраты на обслуживание и время простоя.
Согласно предпочтительному варианту осуществления устройство 33 вертикальной транспортировки состоит из двух координированных элементов перемещения с 2 или 4 отдельными приводами, что позволяет оставить свободным пространство внутри системы, чтобы обеспечить возможность вмещения системы продольного перемещения от одного модуля к другому, как показано на фиг. 9-11, на которых можно увидеть устройство 85 горизонтальной транспортировки (ось Y), расположенное между двумя смежными модулями, что позволяет непосредственно транспортировать лоток 32 от одного модуля к другому соединенному с ним модулю. В варианте осуществления с фиг. 9-11 устройство 85 горизонтальной транспортировки лотков расположено в нижней части смежных модулей. Однако очевидно, что указанное устройство 85 может быть расположено на любой высоте, исходя из требований к конструкции, в которых требуется прохождение лотков 32 от одного модуля к другому.
Данное свойство может иметь большое преимущество в случае, когда модуль выполнен так, чтобы обеспечить вертикальную транспортировку лотков между двумя уровнями здания. В этом случае устройство 85 горизонтальной транспортировки лотков между смежными модулями может быть расположено на верхнем уровне, что позволяет, таким образом, транспортировать лотки непосредственно от нижнего уровня на верхний уровень без нарушения физической непрерывности системы, что не предусмотрено ни в одном из решений, известных из уровня техники.
Таким образом, в отличие от других конструктивных вариантов осуществления, раскрытая механическая часть позволяет оставить свободным проход между модулями, который, таким образом, не имеет каких-либо препятствий в боковой зоне обмена.
Каждый модуль может быть полностью закрыт вертикальными панельными стенками, которые могут иметь различные характеристики и функции. Они могут быть выполнены с панелями четырехугольной формы или геометрически повторяемыми, включая панели, которые могут быть расположены совершенно свободно, в соответствии с типом системы для реализации, и имея следующие возможные неисключительные характеристики:
- легкое закрытие для ограничения проникновения любых загрязнителей;
- прозрачность за счет выполнения из пластика или стекла для прохождения света;
- изоляция для теплоизоляции модуля;
- излучение для обеспечения нагрева зон внутри модуля;
- излучение света с помощью светодиодов или других осветительных устройств;
- с вентиляторами для циркуляции воздуха;
- с выделением газов или продуктов, или питательных веществ для выращивания.
Две боковые зоны, противоположные центральной зоне, занятой устройством 33 вертикальной транспортировки, имеют опорные выступы в виде ребер 37, 37' (см. фиг. 1) для лотков 32, содержащих культуры. Информационная система, предназначенная для выращивания, предусматривает интеллектуальное управление перемещением лотков 32, содержащих культуры, позволяя размещать их на свободных неограниченных высотах.
Помимо содержащих культуры лотков 32, панели, на которых расположены осветительные системы (LED), также могут быть свободно размещены с помощью автоматизированной системы, что позволяет изменять общую конфигурацию каждого модуля 30 также путем перемещения ламп.
Благодаря установке ламп, перемещаемых в модулях, лотки 32 могут быть выполнены со светодиодами со специализацией излучения света (определенная длина волны, специфическая для растений).
Растения нуждаются в различных типах освещения в течение цикла фотосинтеза; светодиодные трубки или существующие системы предусматривают идентификацию излучения "среднего" света (белого или фиолетового света) или имеют все возможности для излучения в одной излучающей системе с помощью светодиодов всех различных типов, собранных с различными типами излучения.
Благодаря возможности перемещения выдвижных ящиков с культурами, их можно подвергать воздействию специального света (например, только дальнего красного цвета и т.д.) и последовательно устанавливать их положение и время облучения, таким образом, может быть уменьшена стоимость осветительной системы благодаря возможности установки лишь отдельных компонентов (светодиодов) в панелях.
Благодаря тому, что лотки 32 могут быть перемещены с определенными шагами с помощью программного обеспечения, может быть оптимизировано расстояние культуры от источника света. В качестве примера, данная возможность позволяет перемещать лотки, содержащие первые ростки, ближе к источнику и, таким образом, уменьшить подвод электрической энергии к осветительной системе с получением того же самого эффекта передачи энергии на лист. Фактически, в общих случаях расстояние размещения лотков от осветительной системы определяется в пространстве, позволяющем растению расти с течением времени, для получения достижимого результата благодаря системе согласно настоящему изобретению, тогда как известные из уровня техники системы должны быть выполнены так, чтобы излучать максимальную мощность с первого же дня, освещая в течение длительного времени то, что фактически не требует никакого света, т.е. поверхность роста, будь то в почве или в инертном материале, в которых имеются лишь небольшие рецептивные листья (по меньшей мере, на ранней фазе роста).
По мере роста растения система, имеющая датчики анализа роста, предоставляет информацию в программную управляющую систему для принятия решения, на каком расстоянии разместить лотки 32 на последующих этапах, а также обеспечивает корректировку облучения/времени (времена и тип излучения) для источников света. Данная система легко адаптируема в зависимости от роста растений, а также различий выращиваемых видов. Описанная в данном документе система позволяет выращивать различные виды в одной и той же системе, обеспечивая полный контроль над их ростом.
Возможность перемещения лотков также способствует возможности осмотра продукта в любое время без риска для человека.
Система согласно изобретению позволяет конфигурировать модули дифференцированным способом, что позволяет изолировать систему в агрессивных окружающих средах или управлять зонами с разными микроклиматам и для точного управления ростом продуктов.
Важным этапом процесса роста является прорастание; этот этап, как правило, с большей интенсивностью выращивания, обычно выполняют в различных зонах. Благодаря мобильности лотков и возможности создания специальных зон, модули проращивания могут быть размещены с контролируемыми температурами, чтобы также ускорить и этот этап, сохраняя при этом контроль над ним.
Таким образом, каждый присоединенный модуль может принимать и распознавать прохождение лотков с культурами, поступающими от других модулей, имеющих другие характеристики. Каждый модуль не обязательно должен обладать всеми указанными выше функциями. Достаточно, чтобы некоторые из них имелись по меньшей мере на одном или на некоторых из них в соответствии с выполняемыми погрузочными работами. Модульность заключается в том, что в любой момент эксплуатации системы конфигурация модулей может быть изменена без дорогостоящих вмешательств. Например, зона орошения может находиться только на одном модуле, лампы могут быть перемещены в различные конфигурации, боковые панели могут быть добавлены или заменены другими, имеющими иные функции.
Благодаря общей модульности компонентов системы зона смешивания питательных веществ может быть расположена вблизи зоны орошения. Это позволяет точно контролировать смеси питательных веществ в соответствии с типом растения и состоянием роста.
Система согласно настоящему изобретению обладает особенностью, заключающейся в возможности ее использования либо в качестве конструкции для манипулирования гидропонными фермами с отдельным вертикальным модулем, либо путем установки большего количества модулей, расположенных в любой компоновке, она может быть использована в качестве интегрированной модульной логистической системы, которая может заменять лотки 32 посредством устройства 33 вертикальной транспортировки, которым оснащен каждый модуль.
Таким образом, посредством панели, оснащенной человек-машинным интерфейсом (ЧМИ) 39 (см. фиг. 1, 4) или дистанционно с помощью другого информационного устройства, оператор может извлечь лоток 32, используемый для гидропонного выращивания, из любого положения, без необходимости работать из модуля, в котором физически расположен нужный предмет.
Таким образом, из любого модуля выращивания оператор извлекает лоток, содержащий культуру, при этом система программного обеспечения позволяет идентифицировать модуль, в котором находится подлежащая манипулированию полка так, что с помощью привода устройство 33 вертикальной транспортировки приводится на надлежащую высоту, забирается соответствующий лоток 32, и, путем опускания до уровня, ближайшего к земле, активируется подъем лотка подъемником посредством роликов 36 (см. фиг. 5-6).
После этого синхронизированное вращение роликов 36 позволяет сместить лоток в одном или другом направлении, так что он может быть смещен в боковом направлении к смежному отдельному модулю конструкции.
В свою очередь, смежный отдельный модуль конструкции, с помощью подъемника в наземном положении, если оно является конечным целевым положением, активирует синхронно вращающиеся ролики и может принять поступающий от смежного модуля лоток на этапе обмена и обеспечивает прохождение, если целевой модуль является другим.
Электронная часть управления и контроля расположена внутри электрического модуля, как правило размещенного в нижней части зоны погрузки и разгрузки, и может управляться с помощью панели управления, обеспечивающей доступ к электрической панели во всех случаях расположения модулей.
Смещение лотка к передней части, т.е. перпендикулярно к направлению бокового смещения, заданному описанными выше роликами 36, достигается путем использования устройства 85 горизонтальной транспортировки лотков, которое остается поддерживаемым несущими нагрузку элементами, поддерживающими сам лоток 32, пока ролики 36 опущены и находятся в нерабочем состоянии, чтобы не создавать помехи во время фронтального перемещения.
Такое устройство 85 является опциональным и устанавливается на модулях 30, в которых необходимо непосредственно транспортировать лотки из одного положения в другое. Как указанно выше, устройство 85 горизонтальной транспортировки лотков может быть установлено на любой высоте и как правило содержит пару ремней с приводом, действующих на двух смежных боковых зонах двух смежных модулей. С помощью указанных ремней с приводом лоток 32 может быть транспортирован непосредственно из боковой зоны данного модуля в соответствующую боковую зону смежного модуля, что не требует вмешательства какого-либо устройства 33 вертикальной транспортировки.
Каждый модуль, составляющий вместе с другими модулями модульную систему для манипулирования гидропонными изделиями согласно изобретению, содержит те же описанные выше устройства, которые являются частью каждого устройства 33 вертикальной транспортировки, которое может быть размещено на той же высоте, путем выполнения соответствующим образом запрограммированных перемещений для синхронного приема перемещаемого лотка и его размещения на центральной части устройства 33 вертикальной транспортировки так, что он может быть смещен в запрограммированное местоположение для загрузки или сбора размещенных в нем компонентов.
Информационная система, интегрированная в каждый из модулей, предусматривает избыточность баз данных по отношению ко всей системе (с любыми ограничениями, если это требуется системным администратором), так что в случае отказа любого из электронных устройств на одном из модулей существует резервная копия данных.
Применение такой системы для манипулирования вертикальными гидропонными культурами обеспечивает многочисленные преимущества для здоровья и экономии в дополнение к тем, которые обеспечиваются благодаря возможности полностью автоматизировать процесс от этапа посева или до размещения контейнеров, в которых предварительно посажены конкретные семена, до этапа сбора урожая.
Лотки, содержащие инертный материал, обеспечивающий пускание ростков и рост растений, могут быть перемещены внутри системы благодаря автоматической смещающей системе.
Для каждого модуля можно определить опциональные области с различной степенью воздействия на полезный объем, позволяющие, концентрированным и более не полностью распределенным способом по всей системе, следующее:
- посев различных видов растений с помощью роботизированной системы или вручную;
- размещение контейнеров, в которых предварительно посажены специальные семена с помощью роботизированной системы или вручную;
- точная подача питания к растениям с помощью пульверизатора, полива, введения или выпускной оросительной системы или с помощью робота;
- хранение изображений, которые могут быть впоследствии проанализированы информационной системой;
- подача необходимого света на этапе роста растений (активация фотосинтеза);
- комфорт окружающей среды, влажность, оксигенация, поток воздуха, температура;
- обеспечение зоны, в которой оператор имеет доступ для отбора проб и проверки выращиваемых культур.
Снова со ссылкой на фиг. 1, можно отметить, что каждый модуль может быть разделен на различные перекрывающиеся зоны, каждая из которых имеет различные функции.
Даже если порядок расположения может быть другим, можно, например, отметить, что на фиг. 1 самая высокая зона, обозначенная номером позиции 70, не имеет освещения, надлежащим образом экранирована и не имеет каналов для воды, таким образом, она представляет собой темную зону, в которую помещены культуры для имитации ночного времени.
Это позволяет выполнять циклы в темноте в данной зоне, удаленной от светового излучения, таким образом, без необходимости выключать (и затем включать) лампы, а путем соответствующего перемещения лотков внутрь таких темных зон.
Под темной зоной 70 расположена зона 71, предназначенная для светодиодных осветительных средств 72, в которую вставлены содержащие культуры лотки для имитации дневного и солнечного излучения.
На самой нижней полке расположена зона 73 орошения, в которую вставлены каналы 74, которые оканчиваются множеством сопел или другими оросительными системами. Каналы в зоне орошения проходят от подходящего источника воды, содержащего питательные вещества и любые ингибиторы, защищающие культуру от наиболее распространенных патогенных агентов, или, в случае аквапонного выращивания, от резервуаров для разведения рыбы с соответствующей фильтрацией.
Данное примерное расположение может быть расширено в качестве предпочтительного варианта или в соответствии с различными требованиями, которые также зависят от разных типов культур.
В более общем случае, в отношении посева или размещения контейнеров с предварительной посаженными растениями, конструкция, используемая для манипулирования гидропонными фермами с одним или более отдельными вертикальными модулями согласно изобретению может быть автоматизирована всякий раз, когда требуются разные типы культур.
Такая автоматизация, управляемая информационной системой, позволяет отслеживать будущий продукт, подлежащий выведению на рынок, непосредственно с этапа посева, поскольку известны координаты посева или размещения контейнеров в отдельном лотке и физическое положение внутри системы лотков, вставленных внутрь модульной системы, так как они уникальны.
Например, доступными исходными данными могут быть: идентификатор растения, тип введенных семян, инертный материал, координаты посева или размещение контейнеров в лотке XY, идентификатор лотка, время посева и т.д.
Кроме того, в отличие от существующих систем, в которых имеются громоздкие сортировочные центры для сортировки питательных веществ, подлежащих добавлению в воду и подаваемых к растущим растениям, в каждом модуле может быть идентифицирована зона, или рационализировано их количество на основе формы системы или частоты ее использования. Лотки, содержащие инертный материал, семена, посаженные в контейнер или уже проросшее растение, могут быть перемещены в зону опрыскивания, обозначенную номером позиции 73 на схематическом виде с фиг. 1.
Это подразумевает значительное уменьшение гидравлической части каждой системы с возможностью дифференциации типа добавок, подлежащих введению в подаваемую жидкость, и даже с возможностью дифференциации их количества и состава с различением каждого отдельного растения, с учетом того, что координаты известны; в течение выращивания может быть добавлена информация, относящаяся к тому, сколько воды получило растение с известным идентификатором, к количеству добавок, частоте опрыскивания и т.д.
Также предусмотрено наличие одной или более камер, расположенных в зоне модуля, которые запоминают состояние растений в лотках. Информационная управляющая система фермы учитывает статус каждого растения, сравнивает его с предыдущими изображениями, с изображениями растений со сходными характеристиками (тип, культура, времена) и оценивает состояние его здоровья.
Таким образом, могут быть активированы корректирующие действия для роста растений, а также обеспечена возможность историзации различных комбинаций состава питания, облучения светом, времени и т.п., что позволяет варьировать процесс роста и обеспечивает непрерывную оптимизацию.
Все это переводится в постоянный источник данных и изображений каждого отдельного растения, причем такие данные могут сохраняться до конца отслеживаемости продукта.
Что касается освещения в существующих внутренних гидропонных фермах, в них используются осветительные системы, обеспечивающие подачу специального света на плантации, что активирует, таким образом, фотосинтез. Фактически, растения каждого типа реагируют по-разному в зависимости от типа падающего на них света.
В отличие от плантаций на почве или в теплицах, которые по необходимости могут быть сезонными и подвержены воздействию всего спектра света, обеспечиваемого солнцем, в закрытых фермах существует возможность освещения растений определенными частями спектра, смешанными с различными интенсивностями друг относительно друга. Дополнительной переменной величиной является количество фотонов, которые могут и должны быть поданы на растение для оптимального роста. В современных вертикальных фермах расстояние от ламп, как правило, является фиксированным, также для инженерного оборудования, при этом размер осветительной системы по необходимости может быть большим.
В случае системы согласно изобретению некоторыми из способов, которые могут стать ограничениями, как описано выше, можно управлять оптимальным способом.
Например, типы света могут быть сосредоточены в одной лампе или дифференцированы по зонам, таким образом, с различными типами светодиодов в зависимости от зоны, при этом при наличии возможности перемещать лотки с растениями можно размещать растения в положениях, в которых они могут получить тип света, необходимый на данный момент их роста, тогда как другие растения могут занимать только что оставленную ими свободную зону.
Темный цикл, который можно получить путем перемещения контейнера с растениями, может позволить использовать меньшее количество излучателей света, которые не выключают и не используют, но их оставляют включенными и распределяют только в тех положениях, в которых требуется их функция.
Данная технология может позволить установить меньшие осветительные системы и рационализировать типы используемых ламп и их количества. Переменная величина "расстояние" от источника света в этом случае является управляемой. Фактически, каждый лоток может быть установлен с ограничителями шага высоты, допускающими переменные расстояния.
Информационная управляющая система согласно изобретению может учитывать необходимые расстояния, тип света, используемого в каждом конкретном случае, используя для своих решений информацию, полученную с изображений, сохраненных для отдельного растения.
Таким образом, в дополнение к предыдущим идентификационным данным растения, для отслеживаемости или для изучения и оптимизации в информации также могут быть сохранены время облучения светом, расстояния, цвета, то есть все переменные величины, связанные с циклами облучения светом, которым они были подвергнуты.
Согласно дополнительным вариантам осуществления изобретения на каждом модуле могут быть установлены датчики и активные элементы, позволяющие создать надлежащую окружающую среду для выращивания одного или более определенных типов плантаций.
Применение системы согласно изобретению для манипулирования вертикальными гидропонными фермами также предполагает увлажнение или осушение воздуха, подачу кислорода или CO2 или других газообразных смесей, нагрев или охлаждение окружающей среды, которые могут быть циклическими или нет, нагрев лотка и т.д. Вся эта информация также может храниться для оптимизации, изучения и отслеживания.
В зависимости от размера системы могут быть использованы зоны, обычно известные как "пролеты", в которых операторы могут иметь под рукой культуры без необходимости перемещаться внутри всей модульной системы.
Уменьшение пространств из-за доступа человека позволяет еще больше оптимизировать используемый для выращивания объем, что, таким образом, радикально уменьшает использование самоходных средств, которые иногда опасны для безопасности операторов, при необходимости достижения высот в несколько метров. В случае систем, предложенных в данном документе, текущий предел высоты для каждого отдельного модуля может быть увеличен до более высоких значений, поскольку более не требуется вмешательства человека на высоте.
Как упомянуто выше, также предусмотрена возможность полного удаления определенного содержащего продукты лотка для посева и сбора урожая, причем они также могут быть перемещены в другие целевые положения с помощью самоходных средств, таких как погрузчики или тому подобное.
Изобретение описано выше со ссылками на его предпочтительный вариант осуществления. Однако при этом понятно, что в изобретении предусмотрены многочисленные варианты, не выходящие за рамки объема правовой охраны и являющиеся технически эквивалентными.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТИКАЛЬНАЯ ФЕРМА ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ | 2023 |
|
RU2823130C1 |
| Программно-аппаратный комплекс для вертикальной культивации растений и способ культивации растений с его применением | 2023 |
|
RU2820484C1 |
| ГИДРОПОННАЯ СИСТЕМА КУЛЬТИВИРОВАНИЯ И ЗАВОД ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ, ВКЛЮЧАЮЩИЙ ГИДРОПОННУЮ СИСТЕМУ КУЛЬТИВИРОВАНИЯ И ПЕНОПОЛИСТИРОЛОВУЮ ТЕПЛИЦУ | 2014 |
|
RU2665932C2 |
| СПОСОБ ВЫРАЩИВАНИЯ РАСТЕНИЙ В УСЛОВИЯХ ЗАЩИЩЕННОГО ГРУНТА, УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ В УСЛОВИЯХ ЗАЩИЩЕННОГО ГРУНТА И СБОРНО-РАЗБОРНЫЙ МНОГОЯРУСНЫЙ СТЕЛЛАЖ ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ В УСЛОВИЯХ ЗАЩИЩЕННОГО ГРУНТА | 2006 |
|
RU2391812C2 |
| СТЕЛЛАЖНАЯ СИСТЕМА ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ С ОБЛУЧАЮЩЕЙ УСТАНОВКОЙ С ПРИНУДИТЕЛЬНЫМ ОХЛАЖДЕНИЕМ | 2018 |
|
RU2722442C1 |
| РЕЗЕРВУАР С РАЗМЕЩЕННОЙ ВЕРТИКАЛЬНОЙ ФЕРМОЙ | 2016 |
|
RU2725805C1 |
| Модуль для выращивания микрозелени из семян растений и способ выращивания микрозелени из семян растений | 2020 |
|
RU2761648C2 |
| Автоматическое модульное устройство вертикальных теплиц на гидропонике | 2022 |
|
RU2794776C1 |
| АЭРО-ГИДРОПОННАЯ УСТАНОВКА ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ IN VITRO | 2018 |
|
RU2693721C1 |
| Гидропонная установка | 1991 |
|
SU1836001A3 |
Изобретение относится к области сельского хозяйства, в частности к растениеводству. Автоматическая модульная система содержит первый модуль с четырехугольным сечением и вертикальным расположением, ограниченный соответствующими вертикальными поддерживающими элементами. Первый модуль содержит две боковые зоны, каждая из которых включает множество по существу горизонтальных и перекрывающихся поддерживающих гнезд или направляющих для лотков, и центральную зону, в которой действует устройство вертикальной транспортировки лотков со скольжением вдоль вертикальной оси (Z), расположенное на средствах перемещения, приводимых в действие узлами с приводом, выполненными с возможностью перевода устройства вертикальной транспортировки из опущенного положения в поднятое положение в соответствии с каждым лотком и наоборот. Устройство вертикальной транспортировки снабжено опорной полкой для лотка и устройствами горизонтальной транспортировки, выполненными с возможностью передвижения указанного лотка вдоль первой горизонтальной оси (Y) от соответствующего гнезда и в направлении к нему. Гнездо расположено внутри одной из боковых зон. Первый модуль дополнительно содержит устройства вертикальной транспортировки, расположенные в центральной зоне, в которой действует устройство вертикальной транспортировки лотков, с взаимодействием с лотком, когда последний располагается на полке устройства вертикальной транспортировки лотков, и со смещением лотка вдоль второй оси (X), горизонтальной и перпендикулярной к первой горизонтальной оси (Y), для выполнения непосредственной транспортировки лотка по направлению к другой полке другого устройства вертикальной транспортировки второго модуля, расположенного рядом и соединенного с указанным первым модулем. Система обеспечивает развитие возможности механизации и автоматизации гидропонного производства, с использованием конструкций с вертикальным расположением, обеспечивающих независимость работы каждого вертикального модуля. 12 з.п. ф-лы, 11 ил.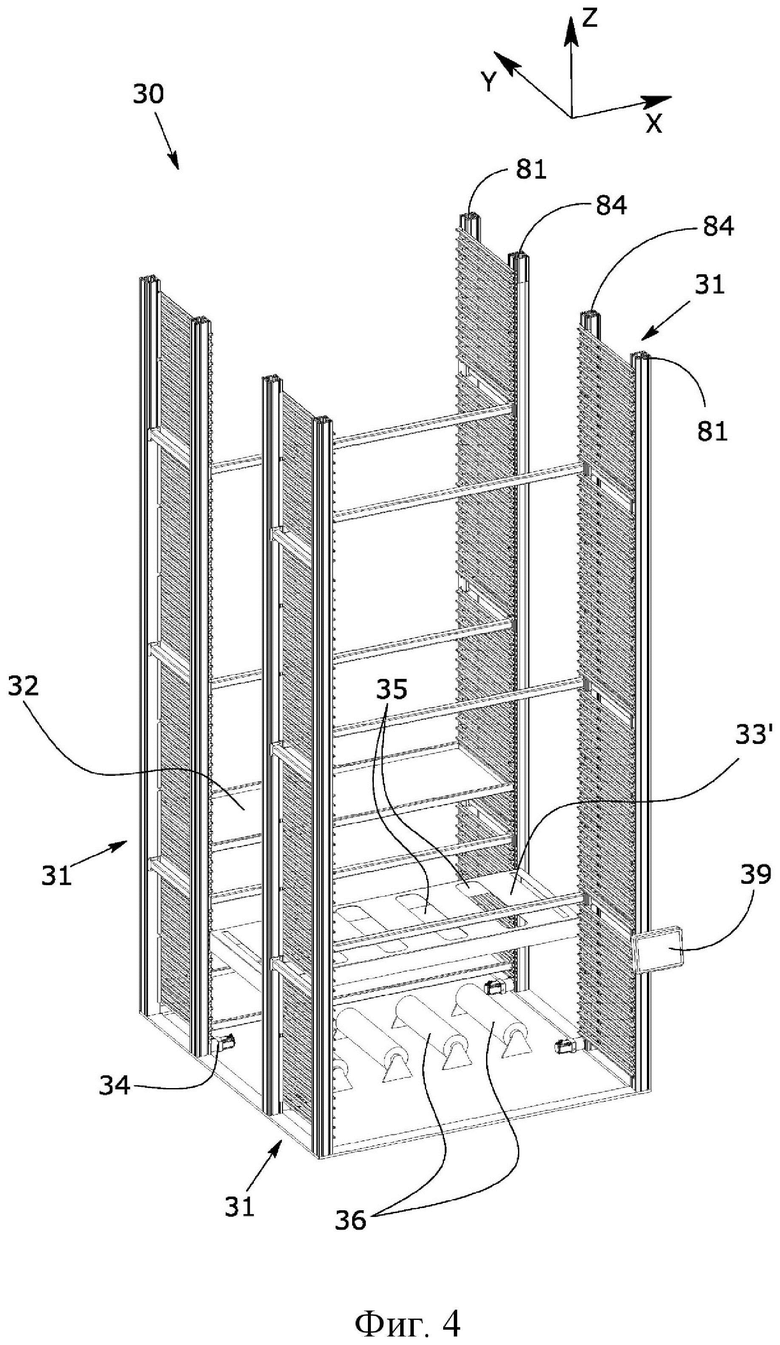
1. Автоматическая модульная система для манипулирования лотками, используемыми для вмещения растений, предназначенных для роста посредством гидропонного, аэропонного или аквапонного выращивания, причем указанная система содержит первый модуль с четырехугольным сечением и вертикальным расположением, ограниченный соответствующими вертикальными поддерживающими элементами, при этом указанный первый модуль содержит две боковые зоны, каждая из которых включает множество по существу горизонтальных и перекрывающихся поддерживающих гнезд или направляющих для лотков, и центральную зону, в которой действует устройство вертикальной транспортировки лотков со скольжением вдоль вертикальной оси (Z), расположенное на средствах перемещения, приводимых в действие узлами с приводом, выполненными с возможностью перевода указанного устройства вертикальной транспортировки из опущенного положения в поднятое положение в соответствии с каждым лотком и наоборот, причем указанное устройство вертикальной транспортировки снабжено опорной полкой для лотка и устройствами горизонтальной транспортировки, выполненными с возможностью передвижения указанного лотка вдоль первой горизонтальной оси (Y) от соответствующего гнезда и в направлении к нему, причем указанное гнездо расположено внутри одной из указанных боковых зон, при этом указанный первый модуль дополнительно содержит устройства вертикальной транспортировки, расположенные в указанной центральной зоне, в которой действует указанное устройство вертикальной транспортировки лотков, с взаимодействием с лотком, когда последний располагается на полке указанного устройства вертикальной транспортировки лотков, и со смещением указанного лотка вдоль второй оси (X), горизонтальной и перпендикулярной к указанной первой горизонтальной оси (Y), для выполнения непосредственной транспортировки указанного лотка по направлению к другой полке другого устройства вертикальной транспортировки второго модуля, расположенного рядом и соединенного с указанным первым модулем.
2. Система по п. 1, причем она содержит множество дополнительных модулей, расположенных смежно друг с другом и соединенных друг с другом так, что по меньшей мере два из них выровнены вдоль первой (Y) или второй (X) горизонтальной оси.
3. Система по любому из пп. 1-2, причем каждый модуль выполнен с квадратной формой, при этом каждая из указанных боковых зон и указанной центральной зоны имеет по существу одинаковые размеры в плане.
4. Система по любому из пп. 1-3, причем указанные устройства вертикальной транспортировки содержат ролики с приводом или ремни с приводом, действующие на лоток, при этом указанная полка имеет отверстия, внутри которых указанные ролики с приводом действуют для зацепления лотка.
5. Система по любому из пп. 1-4, причем она содержит устройство, взаимодействующее между гнездами или направляющими смежных модулей и выполненное с возможностью перемещения лотка из боковой зоны одного модуля к боковой зоне смежного модуля вдоль указанной первой горизонтальной оси (Y).
6. Система по п. 5, причем указанное устройство содержит пару ремней с приводом, размещенных напротив друг друга и параллельно друг другу и расположенных между соответствующими боковыми зонами смежных модулей.
7. Система по любому из пп. 1-6, причем управление обеспечено манипулированием с перемещением указанных лотков с помощью электронного управляющего блока, выполненного с возможностью управления перемещением устройства вертикальной транспортировки, относящегося к каждому модулю, и устройств горизонтальной транспортировки, относящихся к каждому модулю и соединяющих смежные модули.
8. Система по любому из пп. 1-7, причем по меньшей мере один из указанных модулей содержит осветительные и/или оросительные средства и/или поддерживающие элементы.
9. Система по п. 8, причем каждый модуль выполнен с возможностью разделения на различные перекрывающиеся области, каждая из которых выполняет различные или одинаковые функции для развития растений, размещенных в лотках.
10. Система по п. 9, причем лотки размещены внутри каждого модуля в различных зонах, которые имеют различные функции, и одна из которых не имеет освещения и надлежащим образом экранирована, чтобы подвергать культуру условию имитации ночного времени, другая содержит осветительные средства, используемые для имитации дневного времени и солнечного излучения для фотосинтеза, а другая содержит оросительные средства.
11. Система по любому из пп. 9-10, причем каждый модуль размещен в системе в различных зонах, которые имеют различные функции, и одна из которых не имеет освещения и надлежащим образом экранирована, чтобы подвергать культуру условию имитации ночного времени, другая содержит осветительные средства, используемые для имитации дневного времени и солнечного излучения для фотосинтеза, и другая из которых содержит оросительные средства.
12. Система по любому из пп. 1-11, причем манипулирование и приведение в действие перемещения указанных лотков обеспечены с помощью электронного управляющего блока и/или информационной системы, снабженных запоминающим средством, в котором записаны координаты посева отдельного растения и его физическое положение, как он расположен на отдельном лотке.
13. Система по п. 12, причем она содержит одну или более камер, размещенных в подходящей зоне одного или более модулей, выполненных с возможностью записи состояния растений в лотках путем отправки данных в информационную систему, выполненную с возможностью обработки состояния каждого растения, сравнения его с предыдущими изображениями, с изображениями растений со сходными характеристиками и оценки их состояния здоровья для оптимизации процесса роста отдельных растений.
| WO 2017024353 A1, 16.02.2017 | |||
| US 20150282437 A1, 08.10.2015 | |||
| СООРУЖЕНИЕ ДЛЯ ВЫРАЩИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР В ЛОТКАХ С КОНВЕЙЕРНОЙ СИСТЕМОЙ ПЕРЕМЕЩЕНИЯ ЛОТКОВ | 2012 |
|
RU2622740C2 |
| RU 2075283 C1, 20.03.1997 | |||
| KR 1020120090334 A, 17.08.2012 | |||
| АВТОМАТИЧЕСКОЕ ТЕЛЕФОННОЕ УСТРОЙСТВО | 1928 |
|
SU17394A1 |
| Комплекс для производства растительной продукции | 2015 |
|
RU2616396C2 |

