Изобретение относится к технике автоматизированных систем управления и может быть использовано в качестве подвижной автоматизированной машины связи и управления роботехническим комплексом, применяемым различными министерствами и ведомствами.
Известно, что роботехнические комплексы (РТК) применяются при выполнении различного рода работ, в том числе в опасных и чрезвычайных для человека условиях, исключающих его присутствие в месте выполнения таких работ. При этом управление такими РТК осуществляется как в автоматическом, полуавтоматическом и дистанционном режимах, так и в режиме экипажного управления. Эффективность применения роботехнических комплексов во многом зависит от организации системы и средств управления РТК.
В некоторых роботехнических комплексах управление организовано непосредственно с пультов управления, встроенных в РТК, с выносных пультов управления или с пункта дистанционного управления (ПДУ), выполненного с возможностью одновременного или последовательного управления группой роботов, входящих в состав роботехнического комплекса.
По мнению специалистов наиболее эффективным является метод управления роботехническим комплексом с использованием специализированной подвижной машины управления, имеющей в своем составе необходимое оборудование и средства автоматизированного управления РТК, а также выносные средства управления оборудованием РТК при использовании его в труднодоступных местах или на территории со сложным рельефом местности [1].
Наиболее близкой по технической сущности к предлагаемому изобретению является выбранная в качестве прототипа подвижная автоматизированная машина управления, смонтированная на транспортной базе высокой проходимости,
технические возможности которой описаны в патенте РФ №2705217 С1 от 06.11.2019 г., МПК H04N 11/06. Опубликовано в Бюл. №31 [2].
Подвижная автоматизированная машина управления по указанному выше патенту содержит n портативных компьютеров рабочих мест должностных лиц (РМ ДЛ), по одному на каждое из n рабочих мест, два коммутатора объектовой локальной вычислительной сети (ЛВС), телефонные аппараты системы АТС, по одному телефонному аппарату на каждое из n упомянутых рабочих мест должностных лиц, два линейных щита, две волоконно-оптические линии связи (ВОЛС), внешнюю базовую станцию сети служебной радиосвязи, блок транзитной коммутации каналов, блок криптографической защиты информации, блок шлюз-маршрутизатора, блок сопряжения, две проводные линии связи для организации обмена по технологии HDSL, концентратор телефонной связи, сервер комплекса средств автоматизации (КСА), навигационную аппаратуру со встроенной антенной, сервер видеоконференцсвязи, сервер связи, мультиплексор комбинированный систем связи (МКСС), два оптических конвертера, коммутатор проводной связи, телефонный аппарат проводной связи, в качестве которого используется телефонный аппарат системы АТС, и радиостанцию сверхвысокочастотного (СВЧ) диапазона с антенной.
Основным недостатком известной подвижной автоматизированной машины управления является отсутствие в ее составе пульта дистанционного управления подвижным объектом, в том числе роботехническим комплексом, который обеспечивал бы возможность организации линий дистанционного управления и контроля за подвижными объектами при их значительных удалениях от машины управления.
Задачей изобретения является создание подвижной автоматизированной машины связи и управления роботехническим комплексом, обеспечивающей формирование и передачу команд дистанционного управления движением и функциональным оборудованием мобильных роботов различного назначения.
Целью изобретения является повышение оперативности управления роботехническим комплексом как на стоянке, так и при его перемещении по территории с различным рельефом местности.
Поставленная цель достигается тем, что в подвижную автоматизированную машину связи и управления роботехническим комплексом, содержащую два автоматизированных рабочих места должностных лиц (АРМ ДЛ), оборудованных на базе портативных компьютеров, два коммутатора объектовой локальной вычислительной сети (ЛВС), телефонный аппарат системы АТС, блок транзитной коммутации, блок криптографической защиты информации (КЗИ), блок шлюз-маршрутизатора, два линейных щита, две проводные линии связи для организации обмена по технологии HDSL, две волоконно-оптические линии связи (ВОЛС), сервер комплекса средств автоматизации (КСА), навигационную аппаратуру со встроенной антенной, сервер видеоконференцсвязи, сервер связи, мультиплексор комбинированный систем связи (КСС), оптический конвертер, коммутатор проводной связи, радиостанцию сверхвысокочастотного (СВЧ) диапазона с антенной, внешнюю базовую станцию сети служебной радиосвязи с антенной, отличающуюся тем, что в нее дополнительно введены абонентская станция спутниковой связи с антенной системой, два автоматизированных рабочих места оператора (АРМО), оборудованных на базе портативных компьютеров, четыре Web камеры, подключенные по одной к портативным компьютерам АРМ ДЛ и АРМО, широкоформатный жидкокристаллический (ЖК) монитор, многофункциональное устройство (МФУ), сервер системы управления РТК, управляемая цифровая видеокамера, тепловизор, коммутатор каналов, телефонный аппарат системы МБ, вторая радиостанция СВЧ диапазона с антенной, радиостанция УКВ диапазона с антенной, широкодиапазонная радиостанция с двумя антеннами, наземная станция спутниковой связи с антенной системой, сеть связи общего пользования, вышестоящий пункт управления и выносной пункт управления РТК, при этом первый вход-выход портативного компьютера первого автоматизированного рабочего места должностного лица (АРМ ДЛ), ко второму входу-выходу которого подключен вход-выход Web камеры,
по стыку Ethernet соединен с первым входом-выходом первого коммутатора объектовой локальной вычислительной сети (ЛВС), второй вход-выход которого по стыку Ethernet соединен с первым входом-выходом портативного компьютера второго АРМ ДЛ, ко второму входу-выходу которого подключен вход-выход Web камеры, первый вход-выход портативного компьютера первого АРМ оператора, ко второму входу-выходу которого подключен вход-выход Web камеры, по стыку Ethernet соединен с третьим входом-выходом первого коммутатора объектовой ЛВС, четвертый вход-выход которого по стыку Ethernet соединен с первым входом-выходом портативного компьютера второго АРМ оператора, ко второму входу-выходу которого подключен вход-выход Web камеры, пятый, шестой, седьмой, восьмой, девятый и десятый входы-выходы первого коммутатора объектовой ЛВС по стыку Ethernet подключены ко входам-выходам соответственно сервера комплекса средств автоматизации (КСА), навигационной аппаратуры со встроенной антенной, многофункционального устройства, сервера связи, сервера видеоконференцсвязи (ВКС) и широкоформатного жидкокристаллического монитора, одиннадцатый и двенадцатый входы-выходы первого коммутатора объектовой ЛВС по стыку Ethernet подключены к первым входам-выходам соответственно блока транзитной коммутации и второго коммутатора объектовой ЛВС, вторые входы-выходы блока транзитной коммутации по стыку Ethernet соединены с первыми входами-выходами блока криптографической защиты информации (КЗИ), вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами блока шлюз-маршрутизатора, вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами мультиплексора комбинированного систем связи, вторые входы-выходы которого по стыку Ethernet соединены с первыми станционными входами-выходами первого линейного щита, к первым и вторым линейным входам-выходам которого подключены входы-выходы соответственно первой проводной линии связи для организации обмена по технологии HDSL и первой ВОЛС, вторые станционные входы-выходы линейного щита соединены с первыми входами-выходами коммутатора проводной связи, ко вторым и третьим входам-выходам которого подключены линейные входы-выходы соответственно телефонного аппарата системы АТС и телефонного аппарата системы МБ, вторые, третьи, четвертые, пятые и шестые входы-выходы второго коммутатора объектовой ЛВС по стыку Ethernet подключены соответственно ко входам-выходам сервера системы управления РТК, управляемой цифровой видеокамеры и тепловизора, к первым входам-выходам коммутатора каналов и оптического конвертера, вторые, третьи и четвертые входы-выходы коммутатора каналов подключены к канальным входам-выходам соответственно первой радиостанции СВЧ диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны, широкодиапазонной радиостанции, первый и второй высокочастотные входы-выходы которой подключены к высокочастотным входам-выходам соответственно первой и второй антенн широкодиапазонной радиостанции, и радиостанции УКВ диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны, вторые входы-выходы оптического конвертера соединены со вторыми станционными входами-выходами второго линейного щита, к первым и вторым линейным входам-выходам которого подключены соответственно вторая проводная линия связи для организации обмена по технологии HDSL и вторая ВОЛС, по входу-выходу соединенная со входом-выходом выносного пункта управления роботехническим комплексом, третий вход-выход блока шлюз-маршрутизатора соединен с канальным входом-выходом второй радиостанции СВЧ диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны, которая по эфиру соединена с антенной внешней базовой станции сети служебной радиосвязи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом внешней базовой станции сети служебной радиосвязи, четвертый вход-выход блока шлюз-маршрутизатора соединен с канальным входом-выходом абонентской станции спутниковой связи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенной системы, которая по эфиру соединена с антенной системой наземной станции спутниковой связи, высокочастотный
вход-выход которой соединен с высокочастотным входом-выходом наземной станции спутниковой связи, канальные входы-выходы которой соединены с первыми канальными входами-выходами сети связи общего пользования, вторые канальные входы-выходы которой подключены ко входам-выходам вышестоящего пункта управления.
Поставленная цель достигается также тем, что выносной пункт управления роботехническим комплексом содержит линейный щит, мультиплексор комбинированный систем связи (МКСС), коммутатор Ethernet, портативный компьютер выносного автоматизированного рабочего места (АРМ) оператора, навигационную аппаратуру со встроенной антенной, блок коммутации и управления, систему видеонаблюдения, абонентскую станцию (АС) беспроводного широкополосного доступа (БШД) с антенной, радиостанцию СВЧ диапазона с антенной, преобразователь интерфейса, радиостанцию УКВ диапазона с антенной, микротелефонную гарнитуру, телефонный аппарат системы МБ и абонентский телефонный терминал (АТТ), при этом первый станционный вход-выход линейного щита по оптическому стыку соединен с абонентским входом-выходом мультиплексора комбинированного систем связи, канальные входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами коммутатора Ethernet, вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами портативного компьютера выносного автоматизированного рабочего места (АРМ) оператора, вторые входы-выходы которого по стыку RS-232 соединены с входами-выходами навигационной аппаратуры со встроенной антенной, первый и второй управляющие входы-выходы портативного компьютера выносного АРМ оператора подключены к управляющим входам-выходам соответственно блока коммутации и управления и системы видеонаблюдения, вход-выход которой соединен с первым входом-выходом блока коммутации и управления, второй, третий и четвертый управляющие входы-выходы блока коммутации и управления подключены к управляющим входам-выходам соответственно абонентской станции БШД, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны абонентской станции БШД, радиостанции СВЧ диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны радиостанции СВЧ диапазона, и УКВ радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны УКВ радиостанции, третий и четвертый входы-выходы коммутатора Ethernet по стыкам Ethernet подключены к канальным входам-выходам соответственно абонентской станции БШД и радиостанции СВЧ диапазона, пятые входы-выходы коммутатора Ethernet по стыку Ethernet соединены с первыми входами-выходами преобразователя интерфейса, вторые входы-выходы которого соединены с канальными входами-выходами УКВ радиостанции, информационные входы-выходы которой соединены с информационными входами-выходами микротелефонной гарнитуры (МТГ), линейный вход-выход телефонного аппарата системы МБ соединен с третьим станционным входом-выходом линейного щита, а с помощью абонентского телефонного терминала оператор выносного АРМ осуществляет выход в сети подвижной радиосвязи, при этом линейный вход-выход линейного щита является линейным входом-выходом выносного пункта управления роботехническим комплексом и соединен с линейным входом-выходом второй волоконно-оптической линии связи.
Сопоставимый анализ с прототипом показывает, что предлагаемое изобретение отличается от прототипа наличием новых блоков: абонентской станции спутниковой связи с антенной системой, двух автоматизированных рабочих мест оператора (АРМО), оборудованных на базе портативных компьютеров, четырех Web камер, подключенных по одной к портативным компьютерам АРМ ДЛ и АРМО, широкоформатного жидкокристаллического (ЖК) монитора, многофункционального устройства, сервера системы управления РТК, управляемой цифровой видеокамеры, тепловизора, коммутатора каналов, телефонного аппарата системы МБ, второй радиостанции СВЧ диапазона с антенной, широкодиапазонной радиостанции с двумя антеннами, радиостанции УКВ диапазона с антенной, наземной станции спутниковой связи с антенной системой, сети связи общего пользования, вышестоящего пункта управления и выносного пункта управления РТК, а также изменением связей между известными блоками устройства.
При изучении известных технических решений в данной области техники совокупность признаков, отличающих заявляемый объект, не была выявлена. Предлагаемое решение существенно отличается от известных на данный момент времени решений.
Таким образом, заявляемая подвижная автоматизированная машина связи и управления роботехническим комплексом соответствует критерию изобретения «новизна».
Заявляемое решение явным образом не следует из уровня техники и имеет изобретательский уровень.
Это позволяет сделать вывод о соответствии технического решения критерию «существенные отличия».
Заявляемая подвижная автоматизированная машина связи и управления роботехническим комплексом (РТК) может быть реализована с использованием существующих средств связи и аппаратуры, используемой на сетях электросвязи и компьютерных сетях, и является промышленно применимой.
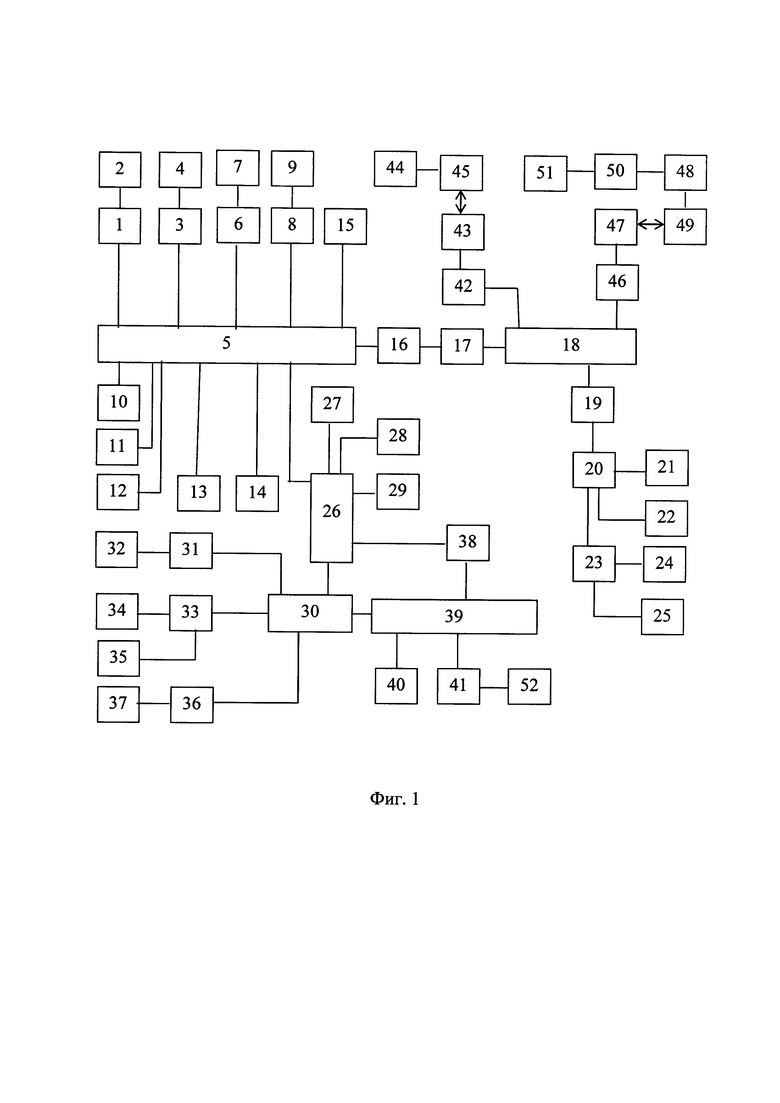
На фиг. 1 представлена структурная электрическая схема подвижной автоматизированной машины связи и управления роботехническим комплексом, а на фиг. 2 приведена структурная схема выносного пункта управления роботехническим комплексом.
Подвижная автоматизированная машина связи и управления роботехническим комплексом содержит (фиг. 1) портативный компьютер первого АРМ ДЛ, Web камеру 2 первого АРМ ДЛ, портативный компьютер 3 второго АРМ ДЛ, Web камеру 4 второго АРМ ДЛ, первый коммутатор 5 объектовой локальной вычислительной сети (ЛВС), портативный компьютер 6 первого АРМ оператора, Web камеру 7 первого АРМ оператора, портативный компьютер 8 второго АРМ оператора, Web камеру 9 второго АРМ оператора, сервер 10 комплекса средств автоматизации (КСА), навигационную аппаратуру 11 со встроенной антенной, многофункциональное устройство 12, выполняющее функции принтера и факсимильного аппарата, сервер связи 13, сервер видеоконференцсвязи 14, широкоформатный жидкокристаллический (ЖК) монитор 15, блок 16 транзитной коммутации, блок 17 криптографической защиты информации (КЗИ), блок 18 шлюз-маршрутизатора, мультиплексор 19 комбинированный систем связи, первый линейный щит 20, первую проводную линию 21 связи для организации обмена по технологии HDSL, первую волоконно-оптическую линию 22 связи (ВОЛС), коммутатор 23 проводной связи, телефонный аппарат 24 системы АТС, телефонный аппарат 25 системы МБ, второй коммутатор 26 объектовой ЛВС, сервер 27 системы управления РТК, управляемую цифровую видеокамеру 28, тепловизор 29, коммутатор 30 каналов, первую радиостанцию 31 СВЧ диапазона с антенной 32,широкодиапазонную радиостанцию 33 с первой 34 и второй 35 антеннами, радиостанцию 36 УКВ диапазона с антенной 37, оптический конвертер 38, второй линейный щит 39, вторую проводную линию 40 связи для организации обмена по технологии HDSL, вторую ВОЛС 41, вторую радиостанцию 42 СВЧ диапазона с антенной 43, внешнюю базовую станцию 44 сети служебной радиосвязи с антенной 45, абонентскую станцию 46 спутниковой связи с антенной системой 47, наземную станцию 48 спутниковой связи с антенной системой 49, сеть связи 50 общего пользования, вышестоящий пункт 51 управления и выносной пункт 52 управления роботехническим комплексом.
При этом первый вход-выход портативного компьютера 1 первого автоматизированного рабочего места должностного лица (АРМ ДЛ), ко второму входу-выходу которого подключен вход-выход Web камеры 2, по стыку Ethernet соединен с первым входом-выходом первого коммутатора 5 объектовой локальной вычислительной сети (ЛВС), второй вход-выход которого по стыку Ethernet соединен с первым входом-выходом портативного компьютера 3 второго АРМ ДЛ, ко второму входу-выходу которого подключен вход-выход Web камеры 4. Первый вход-выход портативного компьютера 6 первого АРМ оператора, ко второму входу-выходу которого подключен вход-выход Web камеры 7, по стыку Ethernet соединен с третьим входом-выходом первого коммутатора 5 объектовой ЛВС, четвертый вход-выход которого по стыку Ethernet соединен с первым входом-выходом портативного компьютера 8 второго АРМ оператора, ко второму входу-выходу которого подключен вход-выход Web камеры 9. Пятый, шестой, седьмой, восьмой, девятый и десятый входы-выходы первого коммутатора 5 объектовой ЛВС по стыку Ethernet подключены ко входам-выходам соответственно сервера 10 комплекса средств автоматизации (КСА), навигационной аппаратуры 11 со встроенной антенной, многофункционального устройства 12, сервера 13 связи, сервера 14 видеоконференцсвязи (ВКС) и широкоформатного жидкокристаллического монитора 15, одиннадцатый и двенадцатый входы-выходы первого коммутатора 5 объектовой ЛВС по стыку Ethernet подключены к первым входам-выходам соответственно блока 16 транзитной коммутации и второго коммутатора 26 объектовой ЛВС. Вторые входы-выходы блока 16 транзитной коммутации по стыку Ethernet соединены с первыми входами-выходами блока 17 криптографической защиты информации (КЗИ), вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами блока 18 шлюз-маршрутизатора, вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами мультиплексора 19 комбинированного систем связи, вторые входы-выходы которого по стыку Ethernet соединены с первыми станционными входами-выходами первого линейного щита 20, к первым и вторым линейным входам-выходам которого подключены входы-выходы соответственно первой проводной линии 21 связи для организации обмена по технологии HDSL и первой ВОЛС 22, вторые станционные входы-выходы линейного щита 20 соединены с первыми входами-выходами коммутатора 23 проводной связи, ко вторым и третьим входам-выходам которого подключены линейные входы-выходы соответственно телефонного аппарата 24 системы АТС и телефонного аппарата 25 системы МБ. Вторые, третьи, четвертые, пятые и шестые входы-выходы второго коммутатора 26 объектовой ЛВС по стыку Ethernet подключены соответственно ко входам-выходам сервера 27 системы управления РТК, управляемой цифровой видеокамеры 28 и тепловизора 29, к первым входам-выходам коммутатора 30 каналов и оптического конвертера 38, вторые, третьи и четвертые входы-выходы коммутатора 30 каналов подключены к канальным входам-выходам соответственно первой радиостанции 31 СВЧ диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 32, широкодиапазонной радиостанции 33, первый и второй высокочастотные входы-выходы которой подключены к высокочастотным входам-выходам соответственно первой 34 и второй 35 антенн широкодиапазонной радиостанции, и радиостанции 36 УКВ диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 37. Вторые входы-выходы оптического конвертера 38 соединены со вторыми станционными входами-выходами второго линейного щита 39, к первым и вторым линейным входам-выходам которого подключены соответственно вторая проводная линия 40 связи для организации обмена по технологии HDSL и вторая ВОЛС 41, по входу-выходу соединенная со входом-выходом выносного пункта 52 управления роботехническим комплексом. Третий вход-выход блока 18 шлюз-маршрутизатора соединен с канальным входом-выходом второй радиостанции 42 СВЧ диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 43, которая по эфиру соединена с антенной 45 внешней базовой станции 44 сети служебной радиосвязи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом внешней базовой станции 44 сети служебной радиосвязи, четвертый вход-выход блока 18 шлюз-маршрутизатора соединен с канальным входом-выходом абонентской станции 46 спутниковой связи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенной системы 47, которая по эфиру соединена с антенной системой 49 наземной станции 48 спутниковой связи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом наземной станции 48 спутниковой связи, канальные входы-выходы которой соединены с первыми канальными входами-выходами сети связи 50 общего пользования, вторые канальные входы-выходы которой подключены ко входам-выходам вышестоящего пункта 51 управления.
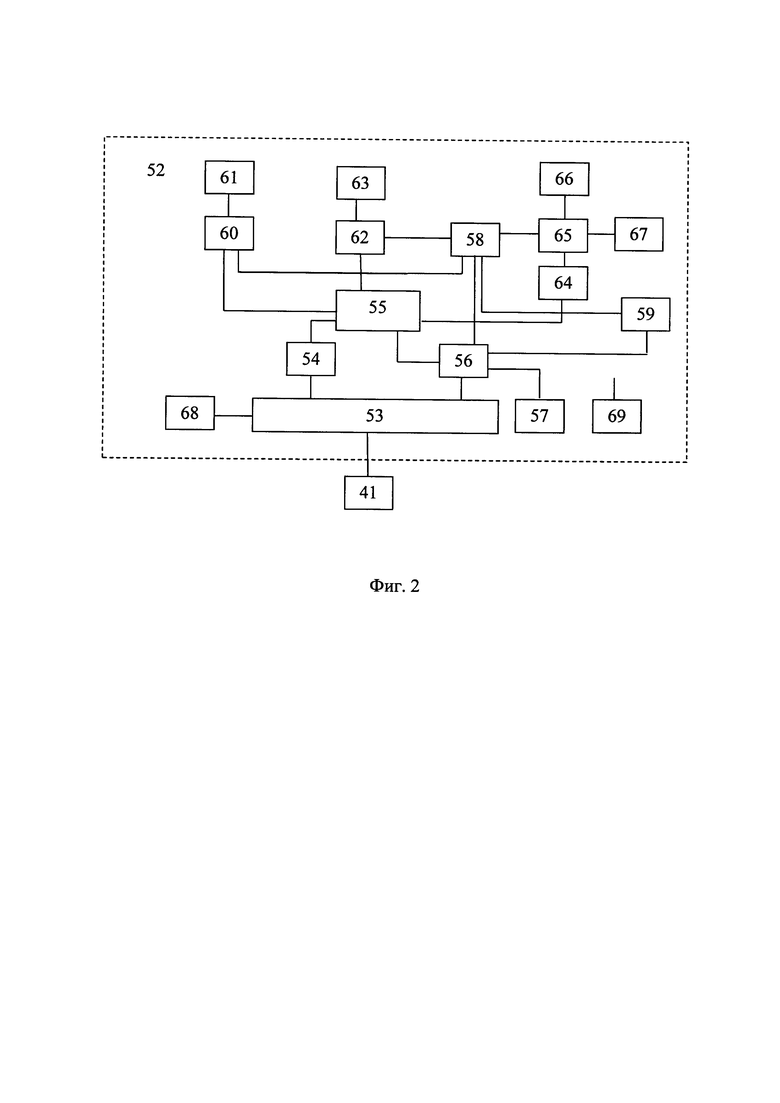
Выносной пункт 52 управления роботехническим комплексом содержит (см. фиг. 2) линейный щит 53, мультиплексор 54 комбинированный систем связи, коммутатор 55 Ethernet, портативный компьютер 56 выносного автоматизированного рабочего места оператора, навигационную аппаратуру 57 со встроенной антенной, блок 58 коммутации и управления, систему 59 видеонаблюдения, абонентскую станцию 60 беспроводного широкополосного доступа (БШД), антенну 61 абонентской станции БШД 60, радиостанцию 62 СВЧ диапазона с антенной 63, преобразователь 64 интерфейса, УКВ радиостанцию 65 с антенной 66, микротелефонную гарнитуру 67, телефонный аппарат 68 системы МБ и абонентский телефонный терминал 69.
При этом первый станционный вход-выход линейного щита 53 по оптическому стыку соединен с абонентским входом-выходом мультиплексора 54 комбинированного систем связи, канальные входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами коммутатора 55 Ethernet, вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами портативного компьютера 56 выносного автоматизированного рабочего места (АРМ) оператора, вторые входы-выходы которого по стыку RS-232 соединены с входами-выходами навигационной аппаратуры 57 со встроенной антенной, первый и второй управляющие входы-выходы портативного компьютера 56 выносного АРМ оператора подключены к управляющим входам-выходам соответственно блока 58 коммутации и управления и системы 59 видеонаблюдения, вход-выход которой соединен с первым входом-выходом блока 58 коммутации и управления, второй, третий и четвертый управляющие входы-выходы блока 58 коммутации и управления подключены к управляющим входам-выходам соответственно абонентской станции 60 БШД, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 61 абонентской станции БШД 60, радиостанции 62 СВЧ диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 63 радиостанции СВЧ диапазона, и УКВ радиостанции 65, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны 66 УКВ радиостанции 65, третий и четвертый входы-выходы коммутатора 55 Ethernet по стыкам Ethernet подключены к канальным входам-выходам соответственно абонентской станции 60 БШД и радиостанции 62 СВЧ диапазона, пятые входы-выходы коммутатора 55 Ethernet по стыку Ethernet соединены с первыми входами-выходами преобразователя 64 интерфейса, вторые входы-выходы которого соединены с канальными входами-выходами УКВ радиостанции 65, информационные входы-выходы которой соединены с информационными входами-выходами микротелефонной гарнитуры 67 (МТГ), линейный вход-выход телефонного аппарата 68 системы МБ соединен с третьим станционным входом-выходом линейного щита 53, а с помощью абонентского телефонного терминала 69 оператор выносного АРМ осуществляет выход в сети подвижной радиосвязи, при этом линейный вход-выход линейного щита 53 является линейным входом-выходом выносного пункта 52 управления роботехническим комплексом и соединен с линейным входом-выходом второй волоконно-оптической линии 41 связи.
Первый 1 и второй 3 портативные компьютеры АРМ ДЛ предназначены для организации обмена информацией с должностными лицами и операторами АРМ, в том числе других взаимодействующих пунктов управления, получения информации о местонахождении, техническом состоянии и функционировании РТК, отображения информации, принятой от средств видеонаблюдения, установленных на РТК. При этом портативные компьютеры (1 и 3) АРМ ДЛ обеспечивают:
ввод, хранение, отображение и документирование информации; обмен информацией с взаимодействующими АРМ по сети обмена данными;
прием и отображение данных и телеметрической информации, сигналов видеоизображения;
решение информационных и расчетных задач, в том числе по применению РТК;
информационно-функциональное взаимодействие с навигационной аппаратурой, включая автоматический прием данных по определению координат своего местоположения и ввод их в память своего портативного компьютера.
В качестве портативных компьютеров (1 и 3) первого и второго АРМ ДЛ могут быть использованы ноутбуки типа «Toshiba» или серийно выпускаемая отечественной промышленностью персональная электронная вычислительная машина (ПЭВМ) типа ЕС-1866 (децимальный номер ПИРШ.466215.005), разработанная ОАО «НИЦЭВТ» (г. Москва).
ПЭВМ типа ЕС-1866 представляет собой многофункциональный терминал, дополненный аппаратными и программными средствами навигации, связи и передачи данных. Она выполняет вычислительные функции, а также функции ввода-вывода, хранения, отображения и обработки информации. Конструктивно указанная ПЭВМ представляет собой переносной защищенный компьютер типа «Notebook», установленный на амортизационную раму с целью исключения его перемещения при нахождении подвижного объекта в движении.
Web камеры (2, 4, 7 и 9) предназначены для обеспечения видеотелефонной связи должностным лицам и операторам с любым внешним абонентом сети передачи данных, рабочее место которого оснащено видеокамерой и оборудованием приема и передачи звука, а также видеоконференцсвязи с применением сервера 14 видеоконференцсвязи.
В качестве видеокамер (2, 4, 7 и 9) могут быть использованы видеокамеры типа Logitech HD Pro Webcam С920. Эта камера обеспечивает видеосвязь с разрешением Full HD 1080 Р со встроенными микрофонами с шумоподавлением, позволяет передавать в режиме реального времени цифровое видео в формате Full HD с разрешением 1920x1080 и скоростью 30 кадров в секунду.
Первый 5 и второй 26 коммутаторы объектовой ЛВС предназначены для доступа абонентов в объектовую локальную сеть, соединения составляющих ее сегментов и обеспечения передачи по ней данных по стыку Ethernet 10/100 Base-TX. В качестве коммутаторов 5 и 26 может быть использован серийно выпускаемый промышленностью сетевой коммутатор типа СКМ-8, разработанный
АО «НПО «РусБИТех» (г.Москва). Указанный коммутатор имеет несколько различных портов, встроенную операционную систему, настройки скорости, дуплекса и аппаратного контроля для каждого порта, обеспечивает поддержки VLAN (виртуальная ЛВС), агрегирование портов, диагностику состояний портов, визуализацию трафика для каждого из портов, удаленного администрирования и конфигурирования устройства.
Портативные компьютеры (6 и 8) первого и второго АРМ операторов предназначены для управления процессами настройки, контроля и обеспечения взаимоувязанной работы аппаратуры и оборудования подвижной автоматизированной машины связи и управления РТК, коммутации и распределения принятых каналов и цифровых потоков, а также для получения информации о местонахождении, техническом состоянии и функционировании РТК, отображения информации, принятой от средств видеонаблюдения, установленных на РТК, формирования команд управления РТК и средствами видеонаблюдения, управления передачей информации удаленным потребителям.
Портативные компьютеры (6 и 8) первого и второго АРМ операторов представляют собой ПЭВМ, выполненную в виде единого моноблока, размещенного в корпусе, содержащую системный блок, включающий в себя материнскую плату, на которой размещены системная шина, микропроцессор, ОЗУ, ПЗУ и контроллер клавиатуры, а также содержащую адаптер монитора, адаптер портов, контроллер дополнительных устройств, контроллер дисков, жесткий магнитный диск, системное программное обеспечение и функциональное прикладное программное обеспечение, в том числе для управления РТК, поставляемые на накопителе на жестком магнитном диске, платы аудио ввода-вывода, платы видео ввода-вывода и платы Ethernet, а также содержат дисплей с плазменным экраном, стандартную клавиатуру, графический манипулятор типа «мышь» и джойстик.
При этом с портативных компьютеров (6 и 8) обеспечивается:
ввод, хранение, отображение и документирование информации;
обмен информацией с взаимодействующими АРМ по сети обмена данными;
автоматическое тестирование каналов связи, анализ и выбор оптимальных частот;
автоматическую диагностику аппаратуры с визуальным отображением ее технического состояния;
дистанционное управление аппаратурой из состава машины связи и управления в объеме возможностей, предусмотренных в аппаратуре;
визуальный контроль информационного обмена;
сбор, обобщение, отображение и документирование информации о состоянии связей, каналов и аппаратуры;
прием, отображение и обработку данных и телеметрической информации, сигналов видеоизображения, полученных от РТК;
формирование и передачу команд управления РТК и средствами видеонаблюдения;
решение информационных и расчетных задач по организации направлений обмена документальной информацией и каналов связи;
информационно-функциональное взаимодействие с навигационной аппаратурой, включая автоматический прием данных по определению координат своего местоположения и ввод их в память портативного компьютера.
В качестве портативных компьютеров (6 и 8) первого и второго АРМ оператора могут быть использованы ноутбуки типа «Toshiba» или серийно выпускаемая ПЭВМ типа ЕС-1866, разработанная ОАО «НИЦЭВТ» (г.Москва).
Сервер 10 комплекса средств автоматизации (КСА) предназначен для организации сети обмена данными между АРМ должностных лиц и операторов, а также с АРМ должностных лиц взаимодействующих объектов. Сервер 10 КСА включает в себя системный блок со встроенным в него специальным программным обеспечением, монитор и стандартную клавиатуру. На сервере 10 установлен комплекс программ, предназначенный для обеспечения всех портативных
компьютеров (1, 3, 6 и 8) и других серверов единым астрономическим и оперативным временем.
Сервер 10 КСА обеспечивает функционирование АРМ ДЛ и операторов, автоматизированный сбор и обработку данных, ведение, обновление и хранение базы данных, работу должностных лиц и операторов с базой данных, хранение управляющей информации, обмен сообщениями и файлами, протоколирование действий должностных лиц и операторов, прием, обработку, отображение и передачу формализованной и неформализованной информации, представление (вывод) информации в требуемом виде на печать, экраны индивидуального и коллективного пользования.
В качестве навигационной аппаратуры 11 со встроенной антенной может быть использован возимый приемоиндикатор (ВПИ) типа «Грот-В». Принцип действия этого приемоиндикатора основан на комплексной обработке информации, поступающей от автономной навигационной системы геомагнитного типа и двенадцатиканального приемника спутниковой навигационной системы типа ГЛОНАСС/GPS. При управлении с клавиатуры ВПИ «Грот-В» имеет интерфейс обмена с внешними устройствами и может взаимодействовать с ними. ВПИ является полностью автоматическим прибором и может работать без вмешательства оператора сразу после установки и включения. В комплексе с портативными компьютерами он обеспечивает визуализацию электронной карты местности, отображение в реальном масштабе времени графической и цифровой информации маршрута и параметров движения подвижного объекта.
Возимый приемоиндикатор выполнен в виде двух законченных блоков: антенного модуля и электронного блока, соединенных между собой высокочастотными кабелями.
Многофункциональной устройство 12 предназначено для сканирования печатных документов формата А4 и преобразования из печатного в электронный вид для последующей передачи по электронной почте, документирования принятой по каналам и линиям связи различной информации, а также документирования информации о состоянии связей, каналов и аппаратуры машины связи
и управления РТК, местонахождении, техническом состоянии и функционировании РТК. В качестве такого устройства может быть использовано многофункциональное устройство типа HP Laser Jet М 1132 MFP или серийно выпускаемое промышленностью многофункциональное устройство типа П-112.
Сервер 13 связи предназначен для обеспечения контроля и управления функционированием технических средств связи, коммутации и шифрования, включая контроль их технического состояния, загрузки каналов, средств связи и коммутации, сбор, обработку и регистрацию потоков событий, относящихся к отказам аппаратуры, сбоям прохождения информации, а также управление конфигурацией оборудования в режиме реального времени. Сервер 13 связи включает в себя ПЭВМ, состоящую из системного блока со встроенным в него специальным программным обеспечением, монитора и стандартной клавиатуры, и IP маршрутизатор. В качестве ПЭВМ, входящей в состав сервера 13, может быть использована ПЭВМ типа ЕС-1866.
Сервер 14 видеоконференцсвязи (ВКС) предназначен для планирования и проведения многоточечной видеоконференцсвязи, а также осуществление ее записи и трансляции.
Сервер 14 ВКС обеспечивает возможность организации видеоконференцсвязи с несколькими (от 4 до 10) участниками, подключенными к сети, работу в режиме «каскада» с другими сторонними многоточечными серверами, трансляцию видеоконференции по протоколу HTTP, а также получение видео- и аудиопотоков от аналоговых и IP видеокамер по протоколу RTSP с выводом их в сеть видеоконференции, запись сеансов видеоконференцсвязи с возможностью выбора разрешения записываемого контента, объединение вместе передачу звука, видео и данных, одновременный вывод двух независимых цифровых видеосигналов от встроенных в АРМ ДЛ и операторов видеокамер и внешних поворотных видеокамер, подключение внешних средств отображения информации. Сервер 14 видеоконференцсвязи включает в себя видеокамеру мультимедийную с гарнитурой типа Plantronics Audio. В качестве видеомонитора используется широкоформатный жидкокристаллический (ЖК) монитор 15.
Широкоформатный жидкокристаллический монитор 15 предназначен для применения в качестве средства отображения различной цветной и черно-белой видеоинформации. В качестве такого монитора может быть использован серийно выпускаемый ЖК монитор типа ВМЦ-101ЖК с диагональю экрана 117 см со светодиодной подсветкой.
Блок 16 транзитной коммутации предназначен для управления потоками информации, разграничивая их по типам шифраторов, по приоритетам доступа (категориям срочности). Данная функция позволяет равномерно загружать каналы связи и позволяет сгладить пиковую активность в сети и ее простои. Проводя непрерывный анализ видимых объектов в доступных сетях, блок 3 транзитной коммутации предотвращает загрузку каналов связи данными, адресованными к недоступным абонентам. Он осуществляет взаимодействие с техническими средствами машины связи через блок 17 криптографической защиты информации. При этом обеспечивается мониторинг и управление техническими средствами в локальном и удаленном режимах. Постоянный мониторинг состояния технических средств блоком 16 транзитной коммутации дает оперативную информацию об используемой аппаратуре, что, в свою очередь, позволяет в кратчайшие сроки выявить причины возможных аварий и своевременно устранить их.
Блок 17 криптографической защиты информации предназначен для создания высокоскоростной защищенной мультисервисной телекоммуникационной инфраструктуры на цифровых сетях связи и обеспечения маршрутизации и шифрования пакетов при работе должностных лиц предлагаемой подвижной автоматизированной машины управления по каналам и трактам в сетях с пакетной коммутацией. Он обеспечивает обмен информацией по стыку Ethernet с оконечным оборудованием данных и каналообразующими средствами со скоростью обмена 10, 100 Мбит/с в соответствии со стандартом IEEE 802.3 по соответствующим протоколам, а также IP-маршрутизацию передаваемой информации, включая данные, речевые сообщения и видеоинформацию, при работе по цифровым каналам связи на IP-сети с шифрованием IP-пакетов.
В качестве блока 17 может быть использован криптомаршрутизатор серии М-479Р, являющийся аппаратно-программным шифровальным средством, предназначенным для обработки информации, передаваемой по каналам и линиям связи. Этот криптомаршрутизатор включает в себя IP маршрутизаторы, что позволяет подключать его к транспортной сети связи без использования промежуточных устройств. В качестве устройства защиты передаваемой информации по каналам связи может быть использован шифратор данных, передаваемых в сети ТСРЯР «Крипто-ТСРЛР». Указанный шифратор данных представляет собой программно-аппаратный комплекс, выполненный на основе ПЭВМ типа IBM PC 486, Pentium и оборудованный устройством touch-memory для предотвращения несанкционированной загрузки операционной системы. Комплекс обеспечивает шифрование данных и аутентификацию с проверкой целостности передаваемой информации. Программно-аппаратный комплекс работает под управлением операционной системы FreeBSD и обеспечивает скорость обмена 10 Мбит/с.В качестве сетевого интерфейса применяется протокол Ethernet.
Блок 18 шлюз-маршрутизатора предназначен для организации работы объектовой локальной вычислительной сети и обеспечения сопряжения с другими сетями обмена данными. Блок 18 обеспечивает пропускную способность коммутации информационных пакетов на основе MAC адресов между интерфейсами локальной вычислительной сети по технологии полный дуплекс.
В качестве блока 18 может быть использован маршрутизатор типа Аттика-ISR1801, разработанный АО НИИ «Полигон» (г. Уфа). Он объединяет в одном устройстве сервисы маршрутизации, коммутации и безопасности. Указанный маршрутизатор осуществляет статическую и динамическую маршрутизацию пакетов как для стека IPv4 (RIP, MP-BGP), так и для стека IPv6, поддерживает классификацию потоков, маркировку и расстановку приоритетов, что позволяет гарантировать полосу пропускания данных и метод их обработки согласно предложенной нагрузки, обеспечивает контроль доступа к потокам данных
в целях обеспечения сетевой безопасности, а также фильтрацию потоков, функции авторизации и аутентификации.
Мультиплексор 19 комбинированный систем связи (МКСС) предназначен для привязки к сети связи общего пользования в качестве оборудования временного группообразования плезиохронной цифровой иерархии (PDH). Он сочетает в себе функции мультиплексирования сигналов PDH E1, Е3 и сигналов Ethernet 10/100 Base-T и обеспечивает ввод, вывод и транзит упомянутых выше сигналов, а также сигналов абонентских интерфейсов ТЧ и ОЦК, организацию линейных трактов по волоконно-оптическим или симметричным кабелям связи. Он содержит в себе базовые блоки и интерфейсные блоки, блок сетевого доступа для коммутации пакетов данных между локальными портами Ethernet и сетевыми портами Е1 или V.35. МКСС поддерживает интерфейсы E1, Е2, Е3 и Е4 с оптическими и электрическими выходами, Ethernet 10/100 Base-T, SDSL, ОЦК и ТЧ. Указанный мультиплексор 19 производится ОАО «СУПЕРТЕЛ» (г. Санкт-Петербург).
Первый 20 и второй 39 линейные щиты содержат присоединительные и коммутационные элементы, к которым с помощью кабельных разъемов подключаются абонентские, соединительные и волоконно-оптические линии связи от аналогичных подвижных машин управления и взаимодействующих аппаратных связи. Они предназначены для распределения и коммутации информационных и управляющих цепей на аппаратуру и оборудование подвижной автоматизированной машины управления. Конструктивно первый 20 и второй 39 линейные щиты выполнены по однотипной схеме в соответствии с отраслевым стандартом, но отличаются количеством установленных на панелях щитов присоединительных разъемов и распайке пар подключенных кабелей связи.
Первая 21 и вторая 40 проводные линии связи для организации обмена по технологии HDSL могут быть выполнены с использованием полевого кабеля типа П-274М или телефонного распределительного многожильного кабеля с четверочной структурой типа П-269М-4×4+1×2, П-269М-2×4+1×2.
Первая 22 и вторая 41 волоконно-оптические линии связи могут быть выполнены с помощью полевого оптического кабеля ПОК-Б-4 или оптического кабеля типа П-294.
Коммутатор 23 проводной связи представляет собой аппаратуру распределенной коммутации, которая предназначена для развертывания саморегулирующей цифровой полевой сети проводной связи с распределенной структурой и возможностью выхода на абонентов телефонной сети связи общего пользования. В качестве коммутатора 23 может быть использован полевой телефонный коммутатор типа П-380КМ, обеспечивающий подключение абонентских линий связи с телефонными аппаратами системы АТС и МБ, цифровых линий связи по технологии G.SHDSL и проводных линий Ethernet.
Телефонный аппарат 24 системы АТС предназначен для ведения телефонных переговоров с удаленными абонентами по абонентским линиям и цифровым каналам связи. В качестве такого телефонного аппарата может быть использован телефонный аппарат типа АТ-3031АТС (АТС РГ2.187.096 ТУ).
Телефонный аппарат 25 системы МБ предназначен для ведения телефонных переговоров по проводным соединительным линиям связи в период их развертывания и проверки исправности. В качестве телефонного аппарата 25 может быть использован носимый телефонный аппарат типа ТА-88, выполненный в защищенном корпусе. Он обеспечивает посылку вызова переменным током частотой 25-50 Гц (индукторный вызов) и ведение телефонного разговора с помощью микротелефонной трубки.
Сервер 27 системы управления РТК состоит из вычислительных узлов с программным обеспечением управления и блоками электронной памяти. Он предназначен для приема и высокоскоростной обработки данных, полученных от средств управления, находящихся на РТК, и передачи информации потребителям. Сервер 27 системы управления РТК обеспечивает:
функционирование АРМ ДЛ и АРМ операторов;
хранение, ведение, обновление базы данных и работу с базой данных по управлению РТК;
визуализацию текущей и архивной информации в удобном оператору виде, включая мнемосхемы, графики и журнал сообщений; протоколирование действий операторов;
формирование отчетов о результатах процессов управления РТК.
Управляемая цифровая видеокамера 28 предназначена для видеосъемки и фиксации информации в полевых условиях. Она обеспечивает возможность удаленной высококачественной съемки событий вблизи машины связи и управления РТК с возможностью дистанционного управления камерой оператором АРМ в горизонтальных и вертикальных плоскостях. Управление видеокамерой может осуществляться также с пульта управления. В качестве такой камеры может быть использована видеокамера Sony HXR-NX или цифровая видеокамера Sony DCR-DVD106E.
Тепловизор 29 предназначен для наблюдения за окружающей обстановкой в горизонтальных и вертикальных плоскостях в условиях недостаточной видимости, обеспечиваемой видеокамерой 28.
В качестве тепловизора 29 может быть использован многоканальный тепловизор типа Pergam AT 640 DUO PRO-40 на поворотной платформе для установки на транспортное средство, серийно выпускаемый АО «Пергам-Инжиниринг». Углы обзора такого тепловизора составляют 360° в горизонтальной плоскости и от минус 25 до плюс 90 градусов в вертикальной плоскости. Он защищен от попадания воды и пыли, адаптирован для работы в сложных климатических условиях. Для управления тепловизором используется пульт с джойстиком.
Коммутатор 30 каналов предназначен для коммутации входных цепей на выходные и согласования уровней передаваемых через коммутатор цифровых потоков, трактов и каналов связи. Он представляет собой автоматизированный кросс-коммутатор с коммутационным полем NxN входа-выхода (канала связи). Конструктивно коммутатор выполнен в виде единого моноблока, включающего электронное поле, к которому подключаются разъемы линейной и станционной сторон. При этом обеспечивается возможность соединения между собой любых N каналов станционной стороны и любых N каналов линейной стороны, а также коммутации между собой каналов станционной стороны с каналами линейной стороны.
Первая радиостанция 31 СВЧ диапазона с антенной 32 и вторая радиостанция 42 СВЧ диапазона с антенной 43 предназначены для организации каналов высокоскоростной радиосети и обеспечения передачи по ним сигналов управления средствами видеонаблюдения, установленными на РТК, и приема от них сигналов видеоизображения. Обе эти радиостанции являются многоканальными радиостанциями, работающими в СВЧ диапазоне волн. Они обеспечивают работу с однотипными радиостанциями, установленными на РТК, на стоянке и в движении с канальной скоростью передачи информации до 11 Мбит/с, в том числе обеспечивают ретрансляцию сообщений. В радиостанциях используется принцип временного разделения приема и передачи, а также временное уплотнение информации. В качестве таких радиостанций могут быть использованы радиостанции типа Р-168МРА.
В качестве антенн 32 и 43 для радиостанций 31 и 42 СВЧ диапазона используются направленные антенны с круговой диаграммой направленности типа КР и коэффициентом усиления 20 дБ или ненаправленные антенны типа АБ с коэффициентом усиления от 1,5 до 8 дБ.
Широкодиапазонная радиостанция 33 с первой 34 и второй 35 антеннами предназначена для обмена оперативной информацией по каналам, образованным в диапазонах коротких волн (KB), метровых волн (MB) или дециметровых волн (ДМВ). Эта радиостанция является многофункциональной приемопередающей станцией, выполненной в возимом варианте, состоящей из приемопередатчика, имеющего два антенных разъема для подключения первой 34 и второй 35 антенн, разъемы для выдачи каналов, модуля сопряжения и антенных устройств. Широкодиапазонная радиостанция построена с использованием компонентов современных программно-аппаратных средств с цифровой обработкой сигналов. При работе в радиосети прямой связи (РПС), распределенно-опорной сети (РОС) или сети радио доступа (СРД) обеспечиваются:
автоматическая динамическая маршрутизация информации с коммутацией каналов и пакетов;
различные виды услуг, предоставляемых абонентам при работе на стоянке и в движении;
различные информационные скорости передачи данных, возможность наращивания пропускной способности и оперативного восстановления связи;
автоматический выбор частот для связи или ретрансляции;
автоматическая аутентификация, идентификация радиостанций и абонентов сети;
использование стандартизованных протоколов;
возможность ввода-вывода данных с внешних носителей;
криптографическая защита передаваемой по радиоканалам информации.
Первая антенна 34 широкодиапазонной радиостанции 33 является приемопередающей антенной, обеспечивающей возможность ведения радиосвязи в диапазоне волн от 30 до 2500 МГц. В качестве такой антенны используется составная штыревая антенна, которая размещается на крыше подвижной автоматизированной машины связи и управления РТК. Эта антенна обеспечивает радиосвязь в MB или ДМВ диапазонах волн при работе на стоянке и в движении.
Вторая антенна 35 радиостанции 33 является приемопередающей антенной, обеспечивающей возможность ведения радиосвязи в KB диапазоне волн от 1,5 до 30 МГц. В качестве такой антенны может быть использована антенна типа «диполь», например, «наклонный симметричный вибратор», имеющий два одинаковых луча, располагаемых один против другого и закрепляемых на мачте высотой 12 метров. Эта антенна предназначена для обеспечения радиосвязи в KB диапазоне при работе на стоянке.
Радиостанция 36 УКВ диапазона с антенной 37 предназначена для обмена оперативной информацией и передачи команд управления РТК, приема от них данных и телеметрической информации. В качестве радиостанции 36 УКВ диапазона может быть использована радиостанция типа «Ангстрем-В». Указанная радиостанция является возимой приемопередающей станцией с программно-
определяемой архитектурой (SDR), обеспечивающей возможность изменения текущей конфигурации и реализацию новых режимов работы и сервисов путем обновления встроенного программного обеспечения без изменения аппаратной платформы. Она обеспечивает следующие режимы и виды работы: многоканальную радиосвязь;
передачу речи в симплексном и дуплексном режимах между двумя абонентами, а также в симплексном режиме между несколькими абонентами;
передачу речи в дуплексном режиме между несколькими абонентами (конференцсвязь);
ретрансляцию аналоговых и цифровых сигналов;
высокоскоростную передачу данных и коротких текстовых сообщений;
файловый обмен;
обмен навигационной информацией;
автоматическую аутентификацию, идентификацию радиостанций и абонентов сети;
использование стандартизованных протоколов;
возможность ввода-вывода данных с внешних носителей;
криптографическую защиту передаваемой по радиоканалам информации.
Радиостанция 36 УКВ диапазона обеспечивает передачу данных со скоростью до 256 кбит/с в диапазоне от 30 до 220 МГц и до 2 Мбит/с в диапазоне от 220 до 520 МГц.
Антенна 37 радиостанции 36 является приемопередающей и обеспечивающей возможность ведения радиосвязи в диапазоне волн от 30 до 520 МГц. В качестве такой антенны может быть использована антенна типа АД-30/520. Она обеспечивает радиосвязь как на стоянке, так и в движении.
Оптический конвертер 38 является элементом комплекса программно-технических средств и совместно с коммутаторами 5 и 26 объектовой ЛВС предназначен для построения сегментов объектовой локальной вычислительной сети подвижной автоматизированной машины связи и управления РТК с использованием волоконно-оптических линий связи. Он является пассивным устройством, не требующим внешнего электропитания, дополнительной настройки или конфигурации и контроля функционирования.
Внешняя базовая станция 44 сети служебной радиосвязи с антенной 45 предназначена для образования сети беспроводного широкополосного радиодоступа на узле распределения услуг связи, узле доступа на базе стандарта 802.16-2004, через которую осуществляется выход в сети связи общего пользования, а также для обеспечения автономной работы в режиме ретрансляции по высокочастотному тракту. Ее основу составляет радиоблок, работающий в сверхвысокочастотном диапазоне.
Внешняя базовая станция 44 обеспечивает автоматическую организацию радиосети, автоматическую ретрансляцию и маршрутизацию информации, передачу и прием цифровой информации по стыку RS-232C с максимальной скоростью 115 кбит/с, передачу и прием цифровой информации по стыку Ethernet с максимальной скоростью передачи 10 Мбит/с по IEEE 802.3, передачу и прием речевой информации по стыку С1-ТЧ.
В качестве такой станции могут быть использованы серийно выпускаемые промышленностью станция радиодоступа типа WIMIC-2000s или радиостанция Р-169-4Б из состава комплекса технических средств подвижной радиосвязи Р-169.
В качестве антенны 45 для базовой станции 44 может быть использована направленная антенна с коэффициентом усиления 20 дБ или ненаправленная антенна с коэффициентом усиления от 1,5 до 8 дБ.
Абонентская станция 46 спутниковой связи с антенной системой 47 относится к системам персональной спутниковой связи и предназначена для выхода в организованную сеть связи общего пользования с целью передачи информации между абонентами по образованным цифровым каналам связи со скоростью от 1,2 до 9,6 кбит/с.Станции указанной системы персональной спутниковой связи предназначены для пакетной передачи в цифровом виде любых данных (телексных, факсимильных сообщений, компьютерных данных и др.) и организации речевой (радиотелефонной) связи. При этом телефонный режим организуется
с помощью встроенных в абонентский терминал (AT) вокодеров, которые обеспечивают переменную скорость передачи речевого сигнала. Помимо дуплексной телефонной связи персональные AT позволяют подключать персональные компьютеры (ПК) и поддерживают разнообразный набор услуг, таких как передача факсимильных сообщений, электронная и голосовая почта, персональный радиовызов, шифрование данных, а также определение местоположения мобильного абонента.
Абонентская станция 46 спутниковой связи состоит из следующих основных частей:
антенного модуля, обеспечивающего наведение на ретранслятор, размещаемый на космическом аппарате (КА);
аппаратного модуля, который стыкуется с антенным модулем на промежуточных частотах и имеет в своем составе функциональные устройства, обеспечивающие формирование и обработку всех заданных сигналов и частот;
приемопередающей аппаратуры, обеспечивающей прием и передачу сигналов на частотах от 7 до 8 ГГц с преобразованием их в промежуточные частоты 345 и 700 МГц на прием и передачу соответственно;
аппаратных и программных средств подсистемы автоматизированного управления, обеспечивающих управление работой станции;
навигационного комплекса, обеспечивающего получение информации о текущем местоположении станции спутниковой связи.
В состав антенного модуля входит антенная система 47, включающая параболическое зеркало диаметром 1,5 м и опорно-поворотное устройство, а также устройство автоматического развертывания антенной системы для обеспечения работы абонентской станции 46 спутниковой связи в движении.
В состав аппаратного модуля входит приемопередающее оборудование, каналообразующая аппаратура, тракт цифровой обработки сигналов, управляющий процессор и внешнее оборудование.
Абонентская станция 46 спутниковой связи обеспечивает:
дуплексную телефонную связь и передачу данных, а также телефонную связь или межмашинный обмен информацией в режиме удаленного абонента АТС при работе в сетях радиально-узловой связи по закрепленным каналам или каналам, работающим по принципам радио-АТС при непрерывной передаче информации;
дуплексную телефонную связь и передачу данных по 1…4 каналам с пропускной способностью от 1,2 до 9,6 кбит/с, организуемым в четырех направлениях связи по закрепленным каналам или каналам, используемым в режиме радио-АТС при работе в непрерывном режиме;
образование помехозащищенной линии спутниковой связи на скоростях от 1,2 до 9,6 кбит/с.
В станции 46 спутниковой связи обеспечивается обобщенный контроль приемопередающего тракта, индикации режимов работы станции и каналов связи, аварий каналов и отказов аппаратуры.
Наземная станция 48 спутниковой связи совместно с антенной системой 49 предназначена для обеспечения выхода с рабочих мест ДЛ и операторов подвижной автоматизированной машины связи и управления РТК в сеть связи общего пользования при значительном удалении мобильных роботов РТК от вышестоящего органа управления.
Наземная станция 48 спутниковой связи содержит передатчик, малошумящий усилитель, радиоприемное устройство и тракт обработки сигналов с МДЧР и выходом в телефонную сеть связи общего пользования. В качестве наземной станции 48 спутниковой связи может быть использована спутниковая VSAT-станция Ku-диапазона стандарта функционирования DVB-RCS с антенной диаметром 1,2 метра, GPS-приемником и автоматической системой наведения на космический аппарат.
Антенная система 49 наземной станции 48 спутниковой связи состоит из зеркала с облучающей системой, антенно-волноводного тракта, опорно-поворотного устройства (ОПУ) с электросиловым приводом, аппаратуры наведения и автосопровождения. Зеркало антенны выполнено из алюминиевых сплавов в виде отдельных секций, имеющих требуемый профиль поверхности. В качестве антенной системы 49 может быть использована антенная система с диаметром зеркала от 1,2 до 4 метров.
Наземная станция 48 спутниковой связи является многоканальной, обеспечивает образование каналов с различной пропускной способностью и поддерживает разнообразный набор услуг, в том числе пакетную передачу в цифровом виде любых данных и организации радиотелефонной связи.
Наземная станция 48 спутниковой связи предназначена для выхода в сеть спутниковой связи при работе через стволы ретрансляторов космических аппаратов (КА) на геостационарной орбите, работающих в любых условиях и при воздействии преднамеренных помех. Она обеспечивает работу в двух режимах: с обработкой сигналов на борту (ОСБ) ретранслятора и с прямой ретрансляцией сигналов (ПР). При этом станция обеспечивает телефонную связь и передачу данных, включая данные межмашинного обмена, по одному-двум каналам с пропускной способностью 1,2…4,8 кбит/с по закрепленным каналам и каналам радио-АТС или по одному направлению с пропускной способностью 1,2…9,6 кбит/с и 16 кбит/с, а также ведение видеоконференцсвязи с использованием цифровых каналов со скоростями 48, 64, 128, 256 кбит/с с интерфейсом сопряжения Ethernet.
Сеть связи 50 общего пользования предназначена для передачи различных видов информации по трактам и каналам связи, образованным многоканальными станциями радиорелейной связи, средствами каналообразования проводной связи и цифровыми системами волоконно-оптической связи.
Вышестоящий пункт 51 управления предназначен для сбора, обработки и анализа принятой от нижестоящих и взаимодействующих пунктов управления различных видов и объемов информации и данных, своевременной разработки и передачи нижестоящим пунктам управления РТК, в состав которых входят подвижные автоматизированные машины связи и управления РТК, указаний по организации процессов управления роботехническими комплексами в ходе выполнения работ по устранению аварий и чрезвычайных ситуаций.
Выносной пункт 52 управления роботехническим комплексом в составе линейного шита 53, мультиплексора 54 комбинированного систем связи, коммутатора 55 Ethernet, выносного АРМ 56 оператора, навигационной аппаратуры 57 со встроенной антенной, блока 58 коммутации и управления, системы 59 видеонаблюдения, абонентской станции 60 БШД с антенной 61, радиостанции 62 СВЧ диапазона с антенной 63, преобразователя 64 интерфейса, УКВ радиостанции 65 с антенной 66, микротелефонной гарнитуры 67, телефонного аппарата 68 системы МБ и абонентского телефонного терминала 69, предназначен для формирования команд управления РТК, обмена информацией с должностными лицами и операторами АРМ о техническом состоянии и функционировании РТК, передачи информации от средств видеонаблюдения, установленных на управляемом РТК при его нахождении в местах, недоступных для проезда подвижной автоматизированной машины связи и управления РТК.
Выносной пункт 52 обеспечивает передачу на мобильные роботы РТК параметров задач по управлению, программ работы мобильных роботов, формирование и передачу команд дистанционного управления движением и функциональным оборудованием мобильных роботов. С помощью пункта 52 управления осуществляется также дистанционный контроль за работой мобильных роботов и считывание данных регистраторов их параметров.
Назначение и функциональные возможности элементов выносного пункта 52 управления совпадают с аналогичными элементами, входящими в состав основного оборудования машины связи и управления РТК.
Линейный щит 53 содержит присоединительные и коммутационные элементы, к которым с помощью кабельных разъемов подключаются абонентские, соединительные и волоконно-оптические линии связи. Он предназначен для распределения и коммутации информационных и управляющих цепей на аппаратуру и оборудование выносного пункта 52 управления. Конструктивно линейный щит 53 выполнен в соответствии с отраслевым стандартом.
Мультиплексор 54 содержит в себе базовые блоки и интерфейсные блоки, блок сетевого доступа для коммутации пакетов данных между локальными портами Ethernet и сетевыми портами Е1 или V.35. МКСС поддерживает интерфейсы E1, Е2, Е3 и Е4 с оптическими и электрическими выходами, Ethernet 10/100 Base-T, SDSL, ОЦК и ТЧ. Указанный мультиплексор 54 производится ОАО «СУПЕРТЕЛ» (г. Санкт-Петербург).
Коммутатор 55 Ethernet предназначен для организации доступа в образованную объектовую локальную вычислительную сеть машины связи и управления и обеспечения передачи по ней данных по стыку Ethernet 100 Base-TX между автоматизированными рабочими местами должностных лиц и операторов, а также по каналам связи.
В составе указанного коммутатора имеется медиаконвертер, который осуществляет преобразование среды распространения сигнала с одного типа в другой, в том числе сигнала, поступающего с медных проводов на оптические кабели, то есть медиаконвертер является связующим звеном между двумя средами распространения - оптическими и медными кабелями.
Выносное автоматизированное рабочее место (АРМ) оператора, оборудованное на базе портативного компьютера 56, предназначено для формирования команд и сигналов управления оборудованием и функционированием мобильных роботов РТК, передачи данных и обмена информацией с АРМ ДЛ и АРМ операторов, находящихся в подвижной автоматизированной машине связи и управления РТК. Назначение и технические возможности портативного компьютера 56 выносного АРМ оператора аналогичны возможностям портативных компьютеров 6 и 8 АРМ операторов.
В качестве портативного компьютера 56 выносного АРМ оператора может быть использован ноутбук типа «Toshiba» или серийно выпускаемая отечественной промышленностью персональная электронная вычислительная машина (ПЭВМ) типа ЕС-1866 (децимальный номер ПИРШ.466215.005), разработанная ОАО «НИЦЭВТ» (г.Москва).
В качестве навигационной аппаратуры 57 со встроенной антенной может быть использован возимый приемоиндикатор (ВПИ) типа «Грот-В». Принцип действия этого приемоиндикатора основан на комплексной обработке информации,
поступающей от автономной навигационной системы геомагнитного типа и двенадцатиканального приемника спутниковой навигационной системы типа ГЛОНАСС/GPS. При управлении с клавиатуры ВПИ «Грот-В» имеет интерфейс обмена с внешними устройствами и может взаимодействовать с ними. ВПИ является полностью автоматическим прибором и может работать без вмешательства оператора сразу после установки и включения. В комплексе с портативным компьютером АРМ 56 оператора он обеспечивает визуализацию электронной карты местности, отображение в реальном масштабе времени графической и цифровой информации маршрута и параметров движения подвижного объекта.
Возимый приемоиндикатор выполнен в виде двух законченных блоков: антенного модуля и электронного блока, соединенных между собой высокочастотными кабелями.
Блок 58 коммутации и управления предназначен для коммутации и распределения цепей управления аппаратурой и оборудованием выносного пункта 52 управления РТК.
Система 59 видеонаблюдения включает в себя управляемую цифровую видеокамеру и тепловизор. Она предназначена для осуществления видеосъемки событий вблизи выносного пункта управления РТК и наблюдения за работой мобильных роботов, входящих в состав РТК.
В качестве видеокамеры системы 59 видеонаблюдения может быть использована видеокамера Sony HXR-NX или цифровая видеокамера Sony DCR-DVD106E.
Тепловизор предназначен для наблюдения за окружающей обстановкой в горизонтальных и вертикальных плоскостях в условиях недостаточной видимости, обеспечиваемой упомянутой выше видеокамерой. В качестве тепловизора может быть использован многоканальный тепловизор типа Pergam AT 640 DUO PRO-40 на поворотной платформе для установки на транспортное средство, серийно выпускаемый АО «Пергам-Инжиниринг». Углы обзора такого тепловизора составляют 3600 в горизонтальной плоскости и от минус 25 до плюс 90 градусов в вертикальной плоскости. Он защищен от попадания воды и пыли, адаптирован для работы в сложных климатических условиях. Для управления тепловизором используется пульт с джойстиком.
Абонентская станция 60 беспроводного широкополосного доступа (БШД) с антенной 61 предназначена для образования каналов радиодоступа и выхода в сети связи общего пользования, в том числе путем включения в тракты связи, организуемые с помощью имеющихся в составе машины средств связи. Ее основу составляет радиоблок, работающий в сверхвысокочастотном (СВЧ) диапазоне.
Абонентская станция 60 БШД обеспечивает автоматическую ретрансляцию и маршрутизацию информации, обмен данными, передачу и прием цифровой информации по стыку RS-232C с максимальной скоростью 115 кбит/с, передачу и прием цифровой информации по стыку Ethernet с максимальной скоростью передачи 10 Мбит/с по IEEE 802.3, передачу и прием речевой информации по стыку С1-ТЧ.
В качестве такой станции может быть использована серийно выпускаемые промышленностью станция радиодоступа типа WIMIC-2000s.
Антенна 61 является приемопередающей антенной, обеспечивающей возможность ведения радиосвязи в диапазоне волн от 30 до 2500 МГц. В качестве такой антенны используется составная штыревая антенна. Эта антенна обеспечивает радиосвязь в ДМВ диапазоне волн.
Радиостанция 62 СВЧ диапазона с антенной 63 предназначена для организации каналов высокоскоростной радиосети и обеспечения передачи по ним сигналов управления средствами видеонаблюдения, установленными на РТК, и приема от них сигналов видеоизображения. Эта радиостанция являются многоканальной радиостанцией, работающей в СВЧ диапазоне волн. Она обеспечивает работу с однотипными радиостанциями, установленными на РТК, на стоянке и в движении с канальной скоростью передачи информации до 11 Мбит/с, в том числе обеспечивают ретрансляцию сообщений. В радиостанциях используется
принцип временного разделения приема и передачи, а также временное уплотнение информации.
В качестве антенны 63 радиостанции 62 СВЧ диапазона используются направленные антенны с круговой диаграммой направленности типа КР и коэффициентом усиления 20 дБ или ненаправленные антенны типа АБ с коэффициентом усиления от 1,5 до 8 дБ.
Преобразователь 64 интерфейса предназначен для преобразования сигналов с входа-выхода УКВ радиостанции 65 по стыку С1-ТЧ в сигналы по стыку Ethernet для последующей передачи через локальную вычислительную сеть на АРМ должностных лиц и операторов.
Радиостанция 65 УКВ диапазона с антенной 66 предназначена для обмена оперативной информацией и передачи команд управления РТК, приема от них данных и телеметрической информации. Указанная радиостанция является приемопередающей станцией с программно-определяемой архитектурой (SDR), обеспечивающей возможность изменения текущей конфигурации и реализацию новых режимов работы и сервисов путем обновления встроенного программного обеспечения без изменения аппаратной платформы.
Антенна 66 радиостанции 65 является приемопередающей, обеспечивающей возможность ведения радиосвязи в диапазоне волн от 30 до 520 МГц. В качестве такой антенны может быть использована антенна типа АД-30/520.
Микротелефонная гарнитура (МТГ) 67, подключенная к УКВ радиостанции 65, предназначена для слухового приема из радиоканала телефонных и телеграфных сигналов. При этом устройство сопряжения, имеющееся в составе радиостанции, осуществляет преобразование сигналов от МТГ в аналоговые сигналы радиоканалов. В качестве МТГ 67 может быть использована микротелефонная гарнитура типа ГСШ-29, обеспечивающая работу в подвижных объектах с уровнем шума до 120 дБ.
Телефонный аппарат 68 системы МБ предназначен для ведения телефонных переговоров по проводным соединительным линиям связи в период их развертывания и проверки исправности. В качестве телефонного аппарата 68 может
быть использован носимый телефонный аппарат типа ТА-88, выполненный в защищенном корпусе. Он обеспечивает посылку вызова переменным током частотой 25-50 Гц (индукторный вызов) и ведение телефонного разговора с помощью микротелефонной трубки.
Абонентский телефонный терминал 69 представляет собой портативную станцию подвижной радиосвязи. Он обеспечивает возможность выхода в радиосети и на каналы, образованные радиостанциями и станциями спутниковой связи. В качестве такого терминала может быть использована портативная станция типа Р-187П1.
Подвижная автоматизированная машина связи и управления РТК обеспечивает:
1) развертывание трех радиосетей в KB, УКВ и СВЧ диапазонах с использованием первой 31 и второй 42 радиостанций СВЧ диапазона, широко диапазонной радиостанции 33, радиостанции 36 УКВ диапазона, внешней базовой станции 44 сети служебной радиосвязи и обслуживание абонентов, находящихся на АРМ ДЛ и операторов;
2) развертывание спутниковой линии связи с помощью абонентской станции 46 спутниковой связи с антенной системой 47 для работы на стоянке и в движении, передачу образованных каналов на АРМ должностных лиц и операторов, обеспечение по установленному тракту дуплексной телефонной связи и передачи данных, а также телефонной связи или межмашинного обмена в режиме удаленного абонента АТС при работе в сетях радиально-узловой связи по закрепленным каналам или каналам, работающим по принципам радио-АТС при непрерывной передаче информации;
3) выход в организованную с помощью базовых станций магистральную опорную сеть радиосвязи и сеть радиодоступа с использованием широкодиапазонной радиостанции 33 с возможностью автоматической динамической маршрутизации информации с коммутацией каналов и пакетов, обеспечения различных видов услуг, предоставляемых абонентам при работе на стоянке и в движении, в том числе передачу данных с различными информационными скоростями,
соединение удаленных абонентов и участков сети на базе стандартизованных протоколов. При этом обеспечивается автоматический выбор частот радиосвязи и автоматическое установление канала для связи или ретрансляции и контроль состояния радиосети, а работа в радиосети основана на принципах сотовой радиосвязи с адресным вызовом корреспондентов в радиосети;
4) образование проводных линий связи с передачей по ним информации по стыкам C1-И, E1 (G.703, G.704), Е3, Ethernet с различными скоростями;
5) передачу информации с шифрованием высокоскоростных каналов связи с интерфейсом El, Ethernet и среднескоростных каналов связи с интерфейсом C1-И с помощью блока 17 криптографической защиты информации;
6) предоставление инфокоммуникационных услуг передачи данных, обмена электронной корреспонденцией и видеоконференцсвязи с использованием сервера 10 КСА, сервера связи 13 и сервера 14 видеоконференцсвязи;
7) транзитную коммутацию каналов и трактов с использованием блока 16 транзитной коммутации, блока 17 криптографической защиты информации и блока 18 шлюз-маршрутизатора;
8) ретрансляцию (в автоматическом и ручном режимах) сигналов и сообщений с любого каналообразующего средства связи (радиостанций 31, 33, 36, 42, 44, проводных 21, 40 и волоконно-оптических 22, 41 линий связи, абонентской 46 и наземной 48 станций спутниковой связи) на любое другое средство связи, а также с любого субканала радиостанций на любой другой субканал этих радиостанций;
9) поддержку службы единого времени, определение координат своего местоположения и отображение на дисплее портативных компьютеров АРМ ДЛ и операторов в реальном масштабе времени графической цифровой информации координат, маршрута и параметров движения машины связи и управления при помощи навигационной аппаратуры 11 со встроенной антенной;
10) тестирование и диагностику оборудования и аппаратуры связи с портативных компьютеров 6 и 8 автоматизированных рабочих мест первого и операторов, отображение состояния и качества связи;
11) служебную радиосвязь на стоянке и в движении с использованием УКВ радиостанции 36 и антенны 37 с посылкой и приемом избирательного и циркулярного вызовов корреспондентов в образованной радиосети.
Предлагаемая подвижная автоматизированная машина связи и управления РТК обеспечивает формирование и предоставление должностным лицам и операторам следующих видов услуг связи:
видео- и аудиоконференцсвязи;
телефонную связь;
трансляцию потоковых медиаданных от аналоговых и цифровых источников сигнала (передача видовой информации);
защищенную передачу данных и обмен электронными сообщениями;
функционирование АРМ должностных лиц и операторов на единой вычислительной платформе;
управление мобильными роботами РТК с отображением информации и данных по управлению на широкоформатном жидкокристаллическом мониторе.
При этом в подвижной автоматизированной машине связи и управления РТК предусмотрено обеспечение взаимодействия с вышестоящим пунктом управления посредством выхода на каналы сети связи общего пользования, обмена данными и другой информацией о месте нахождения, состоянии оборудования и функционировании мобильных роботов РТК.
Достоинством предлагаемого изобретения является также и то, что имеющийся в машине связи и управления набор средств связи, автоматизации и управления позволяет дополнительно обеспечить управление РТК при его значительном удалении от машины связи за счет использования беспилотного летательного аппарата (БПЛА), имеющего в своем составе ретранслятор связи на УКВ радиостанциях (при наличии БПЛА).
Технический эффект от предлагаемой подвижной автоматизированной машины связи и управления РТК заключается в повышении оперативности управления роботехническим комплексом как на стоянке, так и при его перемещении
по территории с различным рельефом местности, а также в расширении функциональных возможностей и обеспечении расширенного объема предоставляемых должностным лицам и операторам услуг связи, включая телефонную связь и передачу данных, ведение аудио- и видеоконференцсвязи, обмен электронными сообщениями с повышенной степенью защиты передаваемой информации, достигаемый за счет введения новых элементов и изменения связи между известными блоками устройства.
Источники информации.
1. Патент РФ №2212995, МПК B25J 5/00, 3/00, 9/00. БИПМ №27 от 27.09.2003.
2. Патент РФ №2705217 С1, МПК H04N 11/06, 2019 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ КОМАНДНО-ШТАБНАЯ МАШИНА | 2022 |
|
RU2788156C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ УПРАВЛЕНИЯ И СВЯЗИ | 2015 |
|
RU2578805C1 |
| АВТОНОМНЫЙ МОБИЛЬНЫЙ ТЕЛЕКОММУНИКАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2754677C1 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ И РАДИОДОСТУПА | 2023 |
|
RU2807320C1 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ И РАДИОДОСТУПА | 2013 |
|
RU2506723C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ МНОГОКАНАЛЬНОЙ СВЯЗИ | 2023 |
|
RU2808786C1 |
| ПОДВИЖНЫЙ КОМПЛЕКС СРЕДСТВ ОПЕРАТИВНОЙ СВЯЗИ | 2013 |
|
RU2528168C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ ОПЕРАТИВНОЙ ТЕЛЕФОННОЙ И ДОКУМЕНТАЛЬНОЙ СВЯЗИ | 2018 |
|
RU2676081C1 |
| КОМПЛЕКС СРЕДСТВ УПРАВЛЕНИЯ И СВЯЗИ ДЛЯ АВТОМАТИЗИРОВАННОЙ ПЕРЕДВИЖНОЙ ЕДИНИЦЫ | 2023 |
|
RU2822692C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ УПРАВЛЕНИЯ СВЯЗЬЮ | 2017 |
|
RU2671808C1 |
Изобретение относится к технике автоматизированных систем управления и может быть использовано в качестве подвижной машины связи и управления роботехническим комплексом (РТК), применяемым различными министерствами и ведомствами. Техническим результатом является повышение оперативности управления роботехническим комплексом как на стоянке, так и при его перемещении по территории с различным рельефом местности. Упомянутый технический результат достигается тем, что в подвижную автоматизированную машину связи и управления роботехническим комплексом дополнительно введены абонентская станция спутниковой связи 46 с антенной системой 47, два автоматизированных рабочих места оператора (АРМО), оборудованных на базе портативных компьютеров 6 и 8, четыре веб-камеры 2, 4, 7, 9, подключенные по одной к портативным компьютерам автоматизированных рабочих мест должностных лиц (АРМ ДЛ) 1 и 3 и АРМО 6 и 8, широкоформатный жидкокристаллический (ЖК) монитор 15, многофункциональное устройство (МФУ) 12, сервер системы управления РТК 27, управляемая цифровая видеокамера 28, тепловизор 29, коммутатор каналов 30, телефонный аппарат системы МБ (местной батареи) 25, вторая радиостанция сверхвысокочастотного (СВЧ) диапазона 42 с антенной 43, радиостанция УКВ диапазона 36 с антенной 37, широкодиапазонная радиостанция 33 с двумя антеннами 34 и 35, наземная станция спутниковой связи 48 с антенной системой 49, сеть связи общего пользования 50, вышестоящий пункт управления 51 и выносной пункт управления РТК 52. 1 з.п. ф-лы, 2 ил.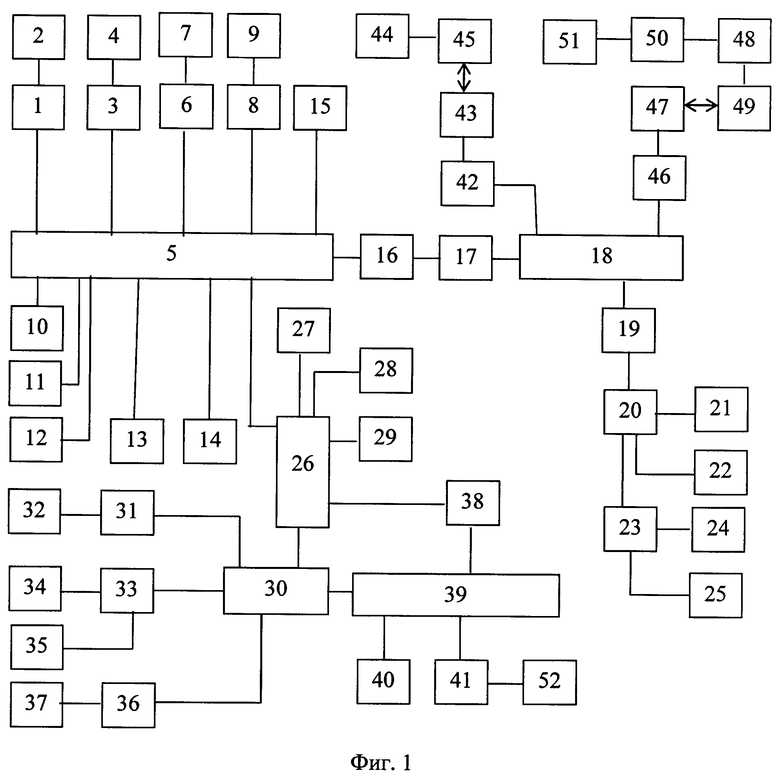
1. Подвижная автоматизированная машина связи и управления роботехническим комплексом, содержащая два автоматизированных рабочих места должностных лиц (АРМ ДЛ), оборудованных на базе портативных компьютеров, два коммутатора объектовой локальной вычислительной сети (ЛВС), телефонный аппарат системы АТС, блок транзитной коммутации, блок криптографической защиты информации, блок шлюз-маршрутизатора, два линейных щита, две проводные линии связи для организации обмена по технологии HDSL, две волоконно-оптические линии связи (ВОЛС), сервер комплекса средств автоматизации (КСА), навигационную аппаратуру со встроенной антенной, сервер видеоконференцсвязи, сервер связи, мультиплексор комбинированный систем связи (КСС), оптический конвертер, коммутатор проводной связи, радиостанцию сверхвысокочастотного (СВЧ) диапазона с антенной, внешнюю базовую станцию сети служебной радиосвязи с антенной, отличающуюся тем, что в нее дополнительно введены абонентская станция спутниковой связи с антенной системой, два автоматизированных рабочих места оператора (АРМО), оборудованных на базе портативных компьютеров, четыре Web-камеры, подключенные по одной к портативным компьютерам АРМ ДЛ и АРМО, широкоформатный жидкокристаллический (ЖК) монитор, многофункциональное устройство (МФУ), сервер системы управления РТК, управляемая цифровая видеокамера, тепловизор, коммутатор каналов, телефонный аппарат системы МБ, вторая радиостанция СВЧ-диапазона с антенной, радиостанция УКВ-диапазона с антенной, широкодиапазонная радиостанция с двумя антеннами, наземная станция спутниковой связи с антенной системой, сеть связи общего пользования, вышестоящий пункт управления и выносной пункт управления РТК, при этом первый вход-выход портативного компьютера первого автоматизированного рабочего места должностного лица (АРМ ДЛ), ко второму входу-выходу которого подключен вход-выход Web-камеры, по стыку Ethernet соединен с первым входом-выходом первого коммутатора объектовой локальной вычислительной сети (ЛВС), второй вход-выход которого по стыку Ethernet соединен с первым входом-выходом портативного компьютера второго АРМ ДЛ, ко второму входу-выходу которого подключен вход-выход Web-камеры, первый вход-выход портативного компьютера первого АРМ оператора, ко второму входу-выходу которого подключен вход-выход Web-камеры, по стыку Ethernet соединен с третьим входом-выходом первого коммутатора объектовой ЛВС, четвертый вход-выход которого по стыку Ethernet соединен с первым входом-выходом портативного компьютера второго АРМ оператора, ко второму входу-выходу которого подключен вход-выход Web-камеры, пятый, шестой, седьмой, восьмой, девятый и десятый входы-выходы первого коммутатора объектовой ЛВС по стыку Ethernet подключены ко входам-выходам соответственно сервера комплекса средств автоматизации (КСА), навигационной аппаратуры со встроенной антенной, многофункционального устройства, сервера связи, сервера видеоконференцсвязи (ВКС) и широкоформатного жидкокристаллического монитора, одиннадцатый и двенадцатый входы-выходы первого коммутатора объектовой ЛВС по стыку Ethernet подключены к первым входам-выходам соответственно блока транзитной коммутации и второго коммутатора объектовой ЛВС, вторые входы-выходы блока транзитной коммутации по стыку Ethernet соединены с первыми входами-выходами блока криптографической защиты информации (КЗИ), вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами блока шлюз-маршрутизатора, вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами мультиплексора комбинированного систем связи, вторые входы-выходы которого по стыку Ethernet соединены с первыми станционными входами-выходами первого линейного щита, к первым и вторым линейным входам-выходам которого подключены входы-выходы соответственно первой проводной линии связи для организации обмена по технологии HDSL и первой ВОЛС, вторые станционные входы-выходы линейного щита соединены с первыми входами-выходами коммутатора проводной связи, ко вторым и третьим входам-выходам которого подключены линейные входы-выходы соответственно телефонного аппарата системы АТС и телефонного аппарата системы МБ, вторые, третьи, четвертые, пятые и шестые входы-выходы второго коммутатора объектовой ЛВС по стыку Ethernet подключены соответственно ко входам-выходам сервера системы управления РТК, управляемой цифровой видеокамеры и тепловизора, к первым входам-выходам коммутатора каналов и оптического конвертера, вторые, третьи и четвертые входы-выходы коммутатора каналов подключены к канальным входам-выходам соответственно первой радиостанции СВЧ-диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны, широкодиапазонной радиостанции, первый и второй высокочастотные входы-выходы которой подключены к высокочастотным входам-выходам соответственно первой и второй антенн широкодиапазонной радиостанции, и радиостанции УКВ-диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны, вторые входы-выходы оптического конвертера соединены со вторыми станционными входами-выходами второго линейного щита, к первым и вторым линейным входам-выходам которого подключены соответственно вторая проводная линия связи для организации обмена по технологии HDSL и вторая ВОЛС, по входу-выходу соединенная со входом-выходом выносного пункта управления роботехническим комплексом, третий вход-выход блока шлюз-маршрутизатора соединен с канальным входом-выходом второй радиостанции СВЧ-диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны, которая по эфиру соединена с антенной внешней базовой станции сети служебной радиосвязи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом внешней базовой станции сети служебной радиосвязи, четвертый вход-выход блока шлюз-маршрутизатора соединен с канальным входом-выходом абонентской станции спутниковой связи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенной системы, которая по эфиру соединена с антенной системой наземной станции спутниковой связи, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом наземной станции спутниковой связи, канальные входы-выходы которой соединены с первыми канальными входами-выходами сети связи общего пользования, вторые канальные входы-выходы которой подключены ко входам-выходам вышестоящего пункта управления.
2. Машина связи и управления по п. 1, отличающаяся тем, что выносной пункт управления роботехническим комплексом содержит линейный щит, мультиплексор комбинированный систем связи (МКСС), коммутатор Ethernet, портативный компьютер выносного автоматизированного рабочего места (АРМ) оператора, навигационную аппаратуру со встроенной антенной, блок коммутации и управления, систему видеонаблюдения, абонентскую станцию (АС) беспроводного широкополосного доступа (БШД) с антенной, радиостанцию СВЧ-диапазона с антенной, преобразователь интерфейса, радиостанцию УКВ-диапазона с антенной, микротелефонную гарнитуру, телефонный аппарат системы МБ и абонентский телефонный терминал (АТТ), при этом первый станционный вход-выход линейного щита по оптическому стыку соединен с абонентским входом-выходом мультиплексора комбинированного систем связи, канальные входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами коммутатора Ethernet, вторые входы-выходы которого по стыку Ethernet соединены с первыми входами-выходами портативного компьютера выносного автоматизированного рабочего места (АРМ) оператора, вторые входы-выходы которого по стыку RS-232 соединены с входами-выходами навигационной аппаратуры со встроенной антенной, первый и второй управляющие входы-выходы портативного компьютера выносного АРМ оператора подключены к управляющим входам-выходам соответственно блока коммутации и управления и системы видеонаблюдения, вход-выход которой соединен с первым входом-выходом блока коммутации и управления, второй, третий и четвертый управляющие входы-выходы блока коммутации и управления подключены к управляющим входам-выходам соответственно абонентской станции БШД, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны абонентской станции БШД, радиостанции СВЧ-диапазона, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны радиостанции СВЧ-диапазона, и УКВ-радиостанции, высокочастотный вход-выход которой соединен с высокочастотным входом-выходом антенны УКВ-радиостанции, третий и четвертый входы-выходы коммутатора Ethernet по стыкам Ethernet подключены к канальным входам-выходам соответственно абонентской станции БШД и радиостанции СВЧ-диапазона, пятые входы-выходы коммутатора Ethernet по стыку Ethernet соединены с первыми входами-выходами преобразователя стыка, вторые входы-выходы которого соединены с канальными входами-выходами УКВ-радиостанции, информационные входы-выходы которой соединены с информационными входами-выходами микротелефонной гарнитуры (МТГ), линейный вход-выход телефонного аппарата системы МБ соединен с третьим станционным входом-выходом линейного щита, а с помощью абонентского телефонного терминала оператор выносного АРМ осуществляет выход в сети подвижной радиосвязи, при этом линейный вход-выход линейного щита является линейным входом-выходом выносного пункта управления роботехническим комплексом и соединен с линейным входом-выходом второй волоконно-оптической линии связи.
| ПОДВИЖНАЯ АВТОМАТИЗИРОВАННАЯ МАШИНА УПРАВЛЕНИЯ | 2019 |
|
RU2705217C1 |
| АВТОНОМНЫЙ МОБИЛЬНЫЙ ТЕЛЕКОММУНИКАЦИОННЫЙ КОМПЛЕКС | 2014 |
|
RU2550339C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ СИСТЕМЫ ПОДВИЖНОЙ СВЯЗИ | 2015 |
|
RU2601124C1 |
| RU 2015123223 A, 10.01.2017 | |||
| АРМАТУРНАЯ СТАЛЬ ПЕРИОДИЧЕСКОГО ПРОФИЛЯ | 0 |
|
SU181258A1 |
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| US 10719078 B2, 21.07.2020 | |||
| US 5179329 A, 12.01.1993. | |||

