Изобретение относится к области авиации, в частности к конструкции беспилотных летательных аппаратов вертикального взлета и посадки.
Известны беспилотный летательный аппарат (квадракоптер) представляющий собой радиоуправляемый летающий прибор с четырьмя винтами, которые вращаются в противоположные стороны по диагонали: одна пара пропеллеров вращается по часовой стрелке, а вторая – против часовой стрелки.
(https://quadrone.ru/blog/stati/kvadrakopter-chto-eto-takoe-i-kak-rabotaet)
Недостатками известных аналогов является малая грузоподъемность и шумность, создаваемая при вращении открытыми винтами.
Задачей стоящей перед автором является создание малошумного беспилотного летательного аппарата вертикального взлета и посадки с большой грузоподъемностью.
Задача решается за счет сущности заявляемого изобретения.
Сущностью изобретения является, возможность увеличения грузоподъемности беспилотных летательных аппаратов и уменьшения шума при их работе, благодаря заявляемому устройству, с закрытыми винтами (крыльчатками), при вращении которых, создаются принудительные потоки газа (воздуха), направленные на вращающиеся цилиндры, создавая в итоге эффект Магнуса.
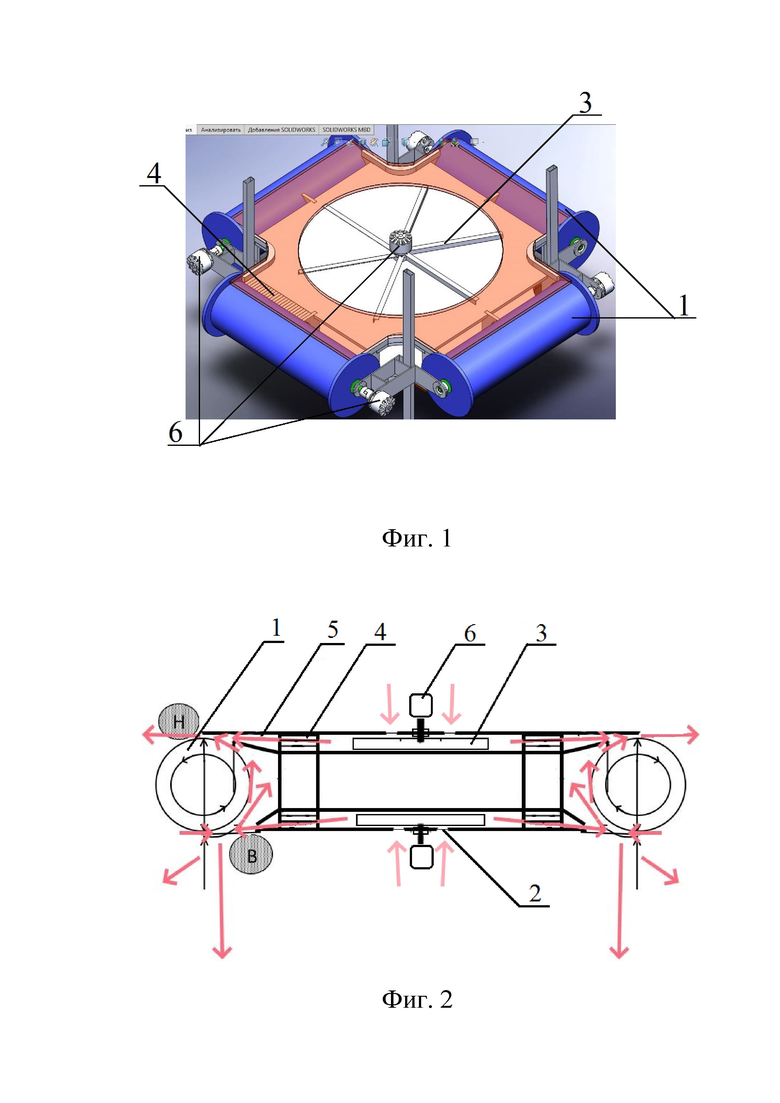
Устройство представляет собой многогранный корпус, например, прямоугольный, по периметру которого установлены цилиндры 1, с возможностью вращения. Для подачи воздуха внутрь устройства, в корпусе проделаны входы 2, ведущие в зону забора, и подачи газа, расположенную внутри корпуса, в которой, сверху и снизу, установлены центробежные крыльчатки 3, создающие принудительный поток газа. На выходе зоны забора и подачи газа, так же по периметру, сверху и снизу, расположены потоководы, представляющие собой ячейки 4, переходящие в туннель 5, сужающийся на выходе непосредственно перед цилиндром 1. Верхние и нижние потоководы независимы и не соединены между собой. Все вращающиеся детали конструкции (крыльчатки 3 и цилиндры 1) приводятся в движение двигателями 6 (электрическими, двигателями внутреннего сгорания (ДВС)). Крыльчаток 3 может быть несколько на каждой стороне, сверху и снизу. Момент вращения компенсируется крыльчатками 3 (верх компенсирует низ).
На фиг. 1 показан пример заявляемого устройства с прямоугольным корпусом в аксонометрической проекции.
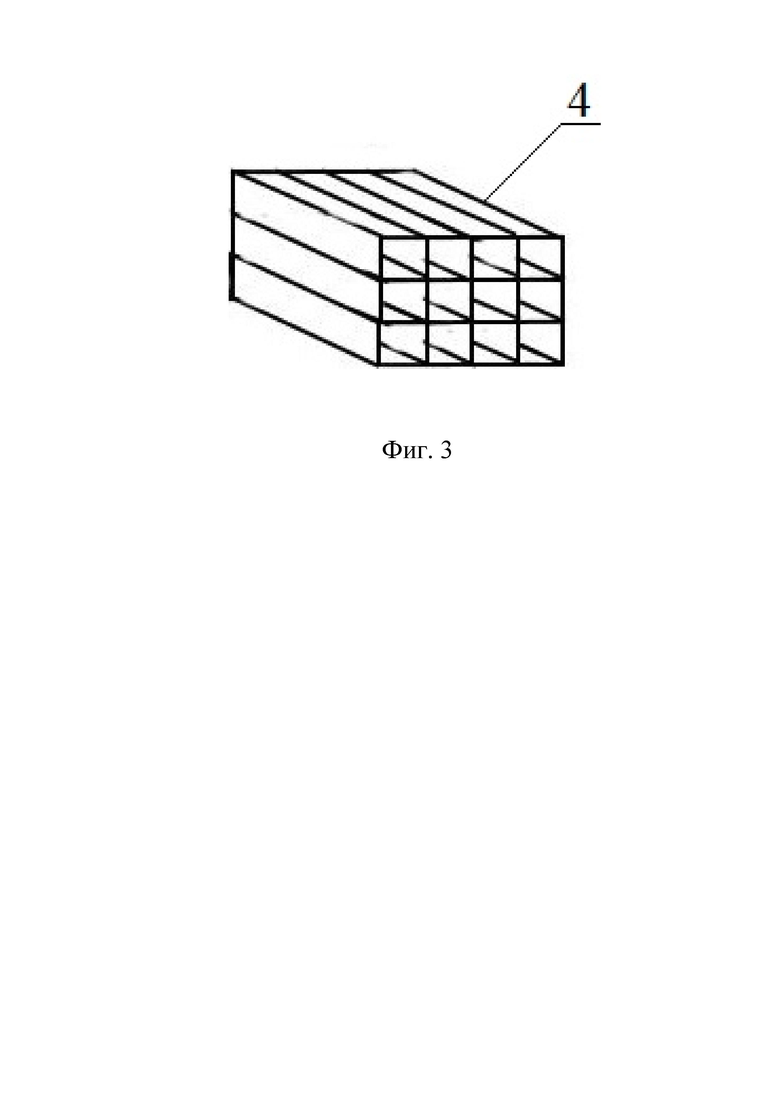
На фиг. 2 показано внутреннее устройство летательного аппарата с прямоугольным корпусом (вид сбоку) и направление движения принудительных потоков, показано (стрелочками). Буквами Н и В обозначены области низкого (Н) и высокого (В) давления, причем область высокого давления перемещается в лево, с увеличением скорости набегающего потока.
На фиг. 3 показан примерный вид ячеек.
Способ работы устройства
Внутрь корпуса, через входы 2 попадает газ. При вращении крыльчаток 3, осуществляется забор и подача газа. Принудительно набегающий поток газа, создаваемый при вращении центробежных крыльчаток 3 (на фиг. 2 показан стрелочками) проходит через ячейки 4 потоковода, что позволяет разбить один сплошной поток на несколько маленьких, и делает его подачу равномерной на всю длину цилиндров 1. После ячеек потоки проходят через туннель 5 в котором сужаются и попадают на вращающиеся цилиндры 1. Сужение потоков газа увеличивает его скорость, но уменьшает его воздействие на площадь цилиндров 1. Принудительно набегающий, на вращающиеся цилиндры 1, поток создает эффект Магнуса на каждом цилиндре 1. Момент вращения верхней крыльчатки 3, компенсируется моментом вращения нижней. Момент вращения каждого цилиндра 1 согласован с моментом вращения всех цилиндров 1, таким образом, создавая эффект Магнуса в одном направлении. Одинаковый по направлению, но разный по величине эффект Магнуса на каждом цилиндре 1 позволяет изменять скорость и траекторию движения летательного аппарата.
На фиг. 2 показана раздача потоков, которая происходит вверху и внизу цилиндров, при этом расчетная площадь уменьшается в два раза, но за счет сужения увеличивается скорость набегающего потока.
ρ*(v + u)²/2 + P2 = ρ*(v - u)²/2 + P1
∆P = ρ*(v+u)²/2 - ρ*(v-u)²/2
∆P = ρ/2*((v² + 2*v*u + u²) - (v² - 2*v*u + u²))
∆P = ρ/2*4*v*u
∆P = ρ*2*v*u
F = ∆P*S/2 [ 1 ]
S = 2*π*R*L
F = ∆P*2*π*R*L/2
F = ρ*2*v*u*2*π*R*L/2
F = ρ*v*u*2*π*R*L,
где:
ρ – Плотность потока;
v – Скорость цилиндра;
u – Скорость потока;
P2 и P1 – Статическое давление потоков сверху и снизу цилиндра;
∆P – Разница давлений сверху и снизу цилиндра;
S – Площадь поверхности цилиндра;
F – Сила тяги от эффекта Магнуса;
R – Радиус цилиндра;
L – Длина цилиндра;
Так как v = w*R, где w – угловая скорость вращения цилиндра, то
F = ρ*w*u*2*π*R²*L
Расчет модели (пример):
диаметр каждого цилиндра – 0,1 м;
длина каждого цилиндра – 0,5 м;
обороты цилиндров – 6000 об/мин;
скорость набегающего потока создаваемого вращением крыльчатки – 17 м/с;
Сила Магнуса будет равна 431,8 Н.
Организация управления изобретением, обусловлена расположением цилиндров, путем изменения силы Магнуса на каждом цилиндре. Так же если управлять моментом вращения при заборе и раздаче потоков, то можно организовать вращение еще и в другой плоскости (горизонтальной).
Заявляемое изобретение может применяться для разведки, доставки грузов, людей и машин (если сделать устройство габаритнее и мощнее), в строительстве, метеорологии, скорой доставки медицинской помощи, почте и др. Так же, заявляемое устройство, может работать, создавая принудительные потоки не только газа, но и жидкости, т.е. работать под водой.
Малошумность работы во время полета обеспечивается отсутствием внешних несущих винтов. Большая грузоподъемность обеспечивается за счет эффекта Магнуса.
Таким образом, поставленная перед автором задача выполнена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Летательный аппарат на основе эффекта Магнуса | 2021 |
|
RU2762906C1 |
| Летательный аппарат на основе эффекта Магнуса | 2024 |
|
RU2827521C1 |
| Способ вращения цилиндров, выполняющих роль крыльев на летательных аппаратах, и беспилотный летательный аппарат для его осуществления | 2024 |
|
RU2826746C1 |
| Винт потоковый | 2021 |
|
RU2778584C1 |
| Сопло с истечением масс и прямовыходящим потоком | 2022 |
|
RU2778959C1 |
| Сопло двигателя с истечением масс | 2020 |
|
RU2757798C1 |
| Способ вращения цилиндров, выполняющих роль крыльев на летательных аппаратах | 2016 |
|
RU2612337C1 |
| Автоплан | 2020 |
|
RU2746285C1 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ СИСТЕМА | 2004 |
|
RU2272748C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С КРЫЛОМ-ПАРАШЮТОМ | 2010 |
|
RU2446990C2 |
Группа изобретений относится к области летательных аппаратов вертикального взлета и посадки. Летательный аппарат представляет многогранный прямоугольный корпус, по периметру которого установлены цилиндры (1) с возможностью вращения. Для подачи воздуха внутрь корпуса проделаны входы (2), ведущие в зону забора и подачи газа, расположенную внутри корпуса, в котором сверху и снизу установлены центробежные крыльчатки (3), создающие принудительный поток газа. На выходе зоны забора и подачи газа по периметру, сверху и снизу, расположены потоководы, представляющие ячейки (4), переходящие в туннель (5), сужающийся на выходе непосредственно перед цилиндром (1). Верхние и нижние потоководы независимы и не соединены между собой. Крыльчатки (3) и цилиндры (1) приводятся в движение двигателями (6). Способ реализуется следующим образом. Внутрь корпуса через входы (2) попадает газ. При вращении крыльчаток (3) осуществляется забор и подача газа. Принудительно набегающий поток газа, создаваемый при вращении центробежных крыльчаток (3), проходит через ячейки (4) потоковода, что позволяет разбить один сплошной поток на несколько маленьких, и делает его подачу равномерной на всю длину цилиндров (1). После ячеек потоки проходят через туннель (5), в котором сужаются и попадают на вращающиеся цилиндры (1). Сужение потоков газа увеличивает его скорость, но уменьшает его воздействие на площадь цилиндров (1). Принудительно набегающий на вращающиеся цилиндры (1) поток создает эффект Магнуса. Момент вращения верхней крыльчатки (3) компенсируется моментом вращения нижней. Группа изобретений направлена на повышение грузоподъемности. 2 н.п. ф-лы, 3 ил.
1. Летательный аппарат на основе эффекта Магнуса, представляющий собой многогранный корпус, по периметру которого установлены вращательные цилиндры с двигателями, в корпусе проделаны входы, ведущие в зону забора и подачи газа, расположенную внутри корпуса, в которой, сверху и снизу, установлены центробежные крыльчатки с двигателями, на выходе зоны забора и подачи газа также по периметру, сверху и снизу, расположены потоководы, представляющие собой ячейки, переходящие в туннель, сужающийся на выходе непосредственно перед цилиндром, при этом верхние и нижние потоководы независимы и не соединены между собой.
2. Способ работы летательного аппарата на основе эффекта Магнуса, заключающийся в том, что внутрь корпуса через входы попадает газ, при вращении крыльчаток осуществляется забор и подача газа, принудительно набегающий поток газа, создаваемый при вращении центробежных крыльчаток, проходит через ячейки потоковода, разбивая один сплошной поток на несколько маленьких и делая его подачу равномерной на всю длину цилиндров, после ячеек потоки проходят через туннель, в котором сужаются и попадают на вращающиеся цилиндры, при этом сужение потоков газа увеличивает его скорость, но уменьшает его воздействие на площадь цилиндров, принудительно набегающий поток создает эффект Магнуса на каждом цилиндре, при этом момент вращения верхней крыльчатки компенсируется моментом вращения нижней.
| US 3630470 A1, 28.12.1971 | |||
| US 3071334 A1, 01.01.1963 | |||
| СИСТЕМА ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ПОСРЕДСТВОМ УСКОРЕНИЯ И УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ТЕКУЧЕЙ СРЕДЫ | 1996 |
|
RU2203199C2 |
| WO 2010043834 A1, 22.04.2010. | |||

