ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее раскрытие в целом относится к управлению штуцером и, более конкретно, к устройству и способам автоматизированного управления штуцером.
Уровень техники
[002] Штуцерные задвижки широко используют в области буровых работ (например, при бурении с отрицательным дифференциальным давлением, бурении с положительным дифференциальным давлением, и т.д.) для управления устьевым давлением (например, поверхностным давлением) устья скважины, функционально связанного с добывающей скважиной. Известные системы управления штуцером содержат панели управления, содержащие индикатор устьевого давления и индикатор положения штуцера, соответственно предоставляющие человеку–оператору бурения соответствующие визуальные показания устьевого давления устья скважины и положения штуцера штуцерной задвижки. В данном контексте под термином "положение штуцера" понимают степень открытости и/или закрытости элемента управления потоком (например, заглушки) штуцерной задвижки относительно полностью открытого и/или полностью закрытого положения элемента управления потоком. Положение штуцера штуцерной задвижки может быть выражено в виде процентного значения от максимального расстояния хода, проходимого элементом управления потоком штуцерной задвижки и/или максимального расстояния хода, проходимого штоком, жестко соединенным (например, непосредственно или опосредованно) с элементом управления потоком штуцерной задвижки.
[003] Панели управления вышеописанных известных систем управления штуцером также содержат управляемый вручную рычаг управления, выполненный с возможностью перемещения и/или позиционирования оператором бурения. В ответ на обнаружение нежелательного устьевого давления посредством индикатора устьевого давления и/или в ответ на обнаружение нежелательного положения штуцера посредством индикатора положения штуцера оператор бурения может перемещать и/или корректировать положение управляемого вручную рычага управления с целью уменьшения степени отклонения устьевого давления устья скважины и/или положения штуцера штуцерной задвижки от требуемого значения и/или значений. Для поддержания устьевого давления и/или положения штуцера штуцерной задвижки в пределах требуемого значения или значений может быть необходима частая корректировка управляемого вручную рычага управления оператором бурения.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[004] В настоящем документе раскрыты устройство и способы автоматизированного управления штуцером. В некоторых примерах раскрыто устройство для автоматического управления штуцерной задвижкой. В некоторых примерах устройство содержит контроллер. В некоторых примерах контроллер выполнен с возможностью управления положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы. В некоторых примерах контроллер выполнен с возможностью управления устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы, причем устье скважины функционально связано со штуцерной задвижкой.
[005] В некоторых примерах раскрыт способ автоматического управления штуцерной задвижкой. В некоторых примерах способ включает управление положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы. В некоторых примерах способ включает управление устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы, причем устье скважины функционально связано со штуцерной задвижкой.
[006] В некоторых примерах раскрыт материальный машиночитаемый носитель данных, содержащий команды. В некоторых примерах исполнение команд приводит к выполнению контроллером управления положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы. В некоторых примерах исполнение команд приводит к выполнению контроллером управления устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы, причем устье скважины функционально связано со штуцерной задвижкой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[007] На фиг. 1 показана блок–схема известной системы управления штуцером.
[008] На фиг. 2 показана блок–схема примерного устройства для автоматизированного управления штуцером, которое может быть реализовано в соответствии с положениями настоящего изобретения.
[009] На фиг. 3A и 3B показана функциональная схема, отражающая примерный способ, который может быть выполнен примерным устройством для автоматизированного управления штуцером по фиг. 2 с целью избирательного управления положением штуцера штуцерной задвижки или давлением устья скважины.
[0010] На фиг. 4 показана примерная процессорная платформа, выполненная с возможностью выполнения команд с целью реализации способа по фиг. 3A и 3B и примерного устройства для автоматизированного управления штуцером по фиг. 2.
[0011] Некоторые примеры показаны на вышеуказанных чертежах и подробно описаны ниже. При описании указанных примеров для идентификации идентичных или сходных элементов используют сходные или идентичные позиции. Чертежи могут быть приведены без соблюдения масштаба, а некоторые детали и некоторые виды на чертежах могут быть показаны увеличенными в масштабе или схематично в целях ясности и/или краткости.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0012] Управление давлением в скважине чрезвычайно важно для успешного осуществления буровых работ (например, бурения с отрицательным дифференциальным давлением, бурения с положительным дифференциальным давлением, и т.д.). Известные системы управления штуцером и/или их панели управления требуют выполнения человеком–оператором бурения регулярных (например, частых) корректировок посредством управляемого вручную рычага управления с целью поддержания устьевого давления устья скважины и/или положения штуцера штуцерной задвижки в пределах заданного значения или значений. В отличие от указанных систем управления штуцером и/или панелей управления, устройство и способы автоматизированного управления штуцером, раскрытые в данном документе, позволяют избирательно управлять устьевым давлением устья скважины посредством контура управления устьевым давлением или положением штуцера штуцерной задвижки посредством контура управления положением штуцера. Реализация раскрытых устройства и способов автоматизированного управления штуцером позволяет уменьшить степень вмешательства человека, необходимого для поддержания устьевого давления устья скважины и/или положения штуцера штуцерной задвижки в пределах требуемого значения или значений, что является преимуществом. Уменьшение степени вмешательства человека приводит к снижению вероятности подвергания человека воздействию условий скважины (например, неуправляемого выброса), а также к снижению эксплуатационного риска, связанного с ошибками, вызванными человеческим фактором. Перед обсуждением подробностей примерных устройства и способов автоматизированного управления штуцером, со ссылкой на фиг. 1 приведено описание известной системы управления штуцером.
[0013] На фиг. 1 показана блок–схема известной системы 100 управления штуцером. Система 100 управления штуцером содержит панель 102 управления, устье 104 скважины, гидравлический блок 106 питания, привод 108 и штуцерную задвижку 110. Система 100 управления штуцером контролирует и/или управляет устьевым давлением (например, поверхностным давлением) устья скважины (например, устья 104 скважины), функционально связанного со скважиной (не показана). Посредством контроля и/или управления устьевым давлением, система 100 управления штуцером также контролирует и/или управляет производительностью скважины. Контроль и/или управление устьевым давлением посредством системы 100 управления штуцером может предотвращать проявления и/или выбросы из скважины.
[0014] Панель 102 управления по фиг. 1 функционально связана с гидравлическим блоком 106 питания для обеспечения управления распределением гидравлической жидкости, подаваемой гидравлическим блоком 106 питания. Согласно приведенному в настоящем документе более подробному описанию, гидравлический блок 106 питания функционально связан с приводом 108 по фиг. 1, привод 108 функционально связан со штуцерной заглушкой 110 по фиг. 1, а штуцерная заглушка 110 функционально связана с устьем 104 скважины по фиг. 1. Таким образом, в результате обеспечения управления распределением гидравлической жидкости, подаваемой гидравлическим блоком 106 питания, панель 102 управления также обеспечивает управление положением штуцера штуцерной задвижки 110 и/или устьевым давлением устья 104 скважины.
[0015] Человек–оператор бурения вручную отслеживает и/или вручную управляет панелью 102 управления по фиг. 1. Панель 102 управления содержит индикатор 112 давления, индикатор 114 положения и рычаг 116 распределения гидравлики. Индикатор 112 давления предоставляет оператору бурения визуальные показания (например, посредством измерительной шкалы или другого устройства отображения) устьевого давления устья 104 скважины по фиг. 1. Индикатор 114 положения предоставляет оператору бурения визуальные показания (например, посредством измерительной шкалы или другого устройства отображения) положения штуцера (например, закрыт на 50%) штуцерной задвижки 110 по фиг. 1. Рычаг 116 распределения гидравлики выполнен с возможностью перемещения (например, поворота, скользящего перемещения, и т.д.) и/или позиционирования оператором бурения с целью регулировки распределения гидравлической жидкости, подаваемой гидравлическим блоком 106 питания по фиг. 1 на привод 108 по фиг. 1.
[0016] Например, в ответ на обнаружение нежелательного устьевого давления устья 104 скважины посредством индикатора 112 давления и/или в ответ на обнаружение нежелательного положения штуцера штуцерной задвижки 110 посредством индикатора 114 положения оператор бурения может перемещать и/или корректировать положение рычага 116 распределения гидравлики в некотором направлении, что приводит к соответствующему перемещению и/или корректировке положения штуцера штуцерной задвижки 110 и/или устьевого давления устья 104 скважины. В результате перемещения и/или корректировки положения рычага 116 распределения гидравлики оператором бурения степень отклонения устьевого давления устья 104 скважины и/или положения штуцера штуцерной задвижки 110 от требуемого значения или значений может быть уменьшена на некоторый промежуток времени (например, до обнаружения оператором бурения другого нежелательного состояния устьевого давления устья 104 скважины и/или положения штуцера штуцерной задвижки 110, требующего дополнительного ручного вмешательства посредством рычага 116 распределения гидравлики панели 102 управления).
[0017] Устье 104 скважины по фиг. 1 обеспечивает структурный и работающий под давлением интерфейс для бурильного и производственного оборудования, связанного со скважиной. Устье 104 скважины содержит датчик 118 давления. Датчик 118 давления определяет, измеряет и/или обнаруживает устьевое давление устья 104 скважины. Датчик 118 давления устья 104 скважины функционально связан (например, посредством проводной и/или беспроводной связи) с индикатором 112 давления панели 102 управления таким образом, что визуальные показания устьевого давления, предоставляемые посредством индикатора 112 давления, соответствуют устьевому давлению, определенному, измеренному и/или обнаруженному посредством датчика 118 давления. Устьевое давление устья 104 скважины, определенное, измеренное и/или обнаруженное посредством датчика 118 давления может расти или падать в результате изменения положения штуцера штуцерной задвижки 110.
[0018] Гидравлический блок 106 питания по фиг. 1 подает гидравлическую жидкость на привод 108 по фиг. 1 на основании положения рычага 116 распределения гидравлики панели 102 управления по фиг. 1. Например, в ответ на перемещение и/или корректировку рычага 116 распределения гидравлики оператором бурения гидравлический блок 106 питания корректирует распределение гидравлической жидкости, подаваемой на привод 108, посредством первой линии 120 подачи гидравлической жидкости и/или второй линии 122 подачи гидравлической жидкости.
[0019] Привод 108 по фиг. 1 представляет собой привод двойного действия, содержащий поршень 124, первый порт 126, второй порт 128 и механизм 130 ручного управления. Первый порт 126 привода 108 гидравлически связан с гидравлическим блоком 106 питания посредством первой линии 120 подачи гидравлической жидкости. Второй порт 128 привода 108 гидравлически связан с гидравлическим блоком 106 питания посредством второй линии 122 подачи гидравлической жидкости. Поршень 124 привода 108 выполнен с возможностью перемещения и/или позиционирования на основании распределения гидравлической жидкости, принятой посредством первого порта 126 и/или второго порта 128 привода 108. Например, поршень 124 может перемещаться в первом направлении в ответ на увеличение количества гидравлической жидкости, принятого посредством первого порта 126 относительно количества гидравлической жидкости, принятого посредством второго порта 128, и может перемещаться во втором направлении, противоположном первому направлению, в ответ на увеличение количества гидравлической жидкости, принятого посредством второго порта 128 относительно количества гидравлической жидкости, принятого посредством первого порта 126. Механизм 130 ручного управления привода 108 представляет собой управляемое вручную колесо и/или рычаг, который может быть использован оператором бурения с целью перемещения и/или позиционирования поршня 124 привода 108. Например, оператору бурения может быть необходимо использовать механизм 130 ручного управления привода 108 в отсутствие гидравлической жидкости, подаваемой с возможностью регулировки на привод 108 посредством гидравлического блока 106 питания.
[0020] Штуцерная задвижка 110 по фиг. 1 управляет буровым потоком из скважины, с которой функционально связано устье 104 скважины по фиг. 1. Штуцерная задвижка 110 содержит шток 132, заглушку 134 и датчик 136 положения. Шток 132 штуцерной задвижки 110 жестко соединен (например, непосредственно или опосредованно) с поршнем 124 привода 108 таким образом, что перемещение поршня 124 привода 108 приводит к соответствующему перемещению штока 132 штуцерной задвижки 110. Сходным образом, заглушка 134 штуцерной задвижки 110 жестко соединена (например, непосредственно или опосредованно) со штоком 132 штуцерной задвижки 110 таким образом, что перемещение штока 132 штуцерной задвижки 110 приводит к соответствующему перемещению заглушки 134 штуцерной задвижки 110.
[0021] Датчик 136 положения штуцерной задвижки 110 функционально связан со штоком 132 штуцерной задвижки 110. Датчик 136 положения определяет, измеряет и/или обнаруживает положение (например, линейное перемещение) штока 132 штуцерной задвижки 110 и/или положение штуцера (например, степень открытости и/или закрытости элемента управления потоком штуцерной задвижки) штуцерной задвижки 110. Например, датчик 136 положения может определять, измерять и/или обнаруживать, что шток 132 штуцерной задвижки 110 находится в положении, соответствующем закрытому на 50% положению штуцера штуцерной задвижки 110. Датчик 136 положения штуцерной задвижки 110 функционально связан (например, посредством проводной и/или беспроводной связи) с индикатором 114 положения панели 102 управления таким образом, что визуальные показания положения штуцера, предоставляемые посредством индикатора 114 положения, соответствуют положению штока 132 и/или положению штуцера штуцерной задвижки 110, определенному, измеренному и/или обнаруженному посредством датчика 136 положения. Положение штуцера штуцерной задвижки 110, определенное, измеренное и/или обнаруженное посредством датчика 136 положения, может увеличиваться и/или уменьшаться в результате изменения положения штока 132 и/или заглушки 134 штуцерной задвижки 110. Изменения положения штуцера штуцерной задвижки 110 могут приводить с соответствующему росту и/или падению устьевого давления устья 104 скважины. В отличие от известной системы 100 управления штуцером по фиг. 1, примерные устройство и способы автоматизированного управления штуцером, описанные в данном документе, позволяют избирательно управлять устьевым давлением устья скважины посредством контура управления устьевым давлением или положением штуцера штуцерной задвижки посредством контура управления положением штуцера.
[0022] На фиг. 2 показана блок–схема примерного устройства 200 для автоматизированного управления штуцером, которое может быть реализовано в соответствии с положениями настоящего изобретения. Согласно приведенному в настоящем документе более подробному описанию, устройство 200 для автоматизированного управления штуцером по фиг. 2 функционально связано с одной или несколькими конструкциями и/или компонентами системы управления штуцером (например, известной системы 100 управления штуцером по фиг. 1). В проиллюстрированном примере по фиг. 2 устройство 200 для автоматизированного управления штуцером содержит примерный датчик 202 положения, примерный датчик 204 давления, примерный пользовательский интерфейс 206, примерный детектор 208 режима, примерный контроллер 210 и примерную память 212. Однако другие примеры реализации устройства 200 для автоматизированного управления штуцером могут содержать меньшее число конструкций или дополнительные конструкции в соответствии с положениями настоящего изобретения.
[0023] Примерный датчик 202 положения по фиг. 2 функционально связан со штоком штуцерной задвижки (например, со штоком 132 штуцерной задвижки 110 по фиг. 1). Датчик 202 положения по фиг. 2 определяет, измеряет и/или обнаруживает положение (например, линейное перемещение) штока штуцерной задвижки и/или положение штуцера штуцерной задвижки (например, степень открытости и/или закрытости элемента управления потоком штуцерной задвижки). Например, датчик 202 положения может определять, измерять и/или обнаруживать, что шток штуцерной задвижки находится в положении, соответствующем закрытой на 50% штуцерной задвижке. В проиллюстрированном примере по фиг. 2 положение штока штуцерной задвижки и/или положение штуцера штуцерной задвижки, определенные, измеренные и/или обнаруженные посредством датчика 202 положения, предоставляют контроллеру 210 по фиг. 2 или обеспечивают доступ к ним для контроллера 210. Данные положения, определенные, измеренные и/или обнаруженные посредством датчика 202 положения, могут представлять собой данные любого вида в любой форме и/или формате, и могут быть сохранены на машиночитаемом носителе данных, таком как примерная память 212, описанная ниже.
[0024] Примерный датчик 204 давления по фиг. 2 функционально связан с устьем скважины (например, с устьем 104 скважины по фиг. 1). Датчик 204 давления по фиг. 2 определяет, измеряет и/или обнаруживает устьевое давление устья скважины. В проиллюстрированном примере по фиг. 2 устьевое давление, определенное, измеренное и/или обнаруженное посредством датчика 204 давления, предоставляют контроллеру 210 по фиг. 2 или обеспечивают доступ к нему для контроллера 210. Данные давления, определенные, измеренные и/или обнаруженные датчиком 204 давления, могут представлять собой данные любого вида в любой форме и/или формате, и могут быть сохранены на машиночитаемом носителе данных, таком как примерная память 212, описанная ниже.
[0025] Примерный пользовательский интерфейс 206 по фиг. 2 содействует взаимодействиям и/или связи между конечным пользователем и устройством 200 для автоматизированного управления штуцером по фиг. 2. Пользовательский интерфейс 206 содержит одно или несколько устройств 214 ввода, посредством которых пользователь может вводить информацию и/или данные в контроллер 210 устройства 200 для автоматизированного управления штуцером. Например, устройство или устройства 214 ввода могут быть реализованы в виде одного или нескольких из кнопки, переключателя, шкальной ручки, клавиатуры, мыши и/или сенсорного экрана, позволяющих пользователю передавать данные и/или команды контроллеру 210 устройства 200 для автоматизированного управления штуцером. В некоторых примерах данные и/или команда или команды, переданные посредством устройства или устройств 214 ввода пользовательского интерфейса 206 идентифицируют и/или указывают на заданное значение положения штуцера и/или требуемое положение штуцера штуцерной задвижки (например, на требуемое положение штуцера штуцерной задвижки 110 по фиг. 1). В некоторых примерах данные и/или команда или команды, переданные посредством устройства или устройств 214 ввода пользовательского интерфейса 206 идентифицируют и/или указывают на заданное значение устьевого давления и/или требуемое устьевое давление устья скважины (например, на требуемое устьевое давление устья 104 скважины по фиг. 1). В некоторых примерах данные и/или команда или команды, переданные посредством устройства или устройств 214 ввода пользовательского интерфейса 206 идентифицируют и/или указывают на выбранный режим управления (например, на режим управления положением штуцера, режим управления устьевым давлением, режим ручного управления, и т.д.) устройства 200 для автоматизированного управления штуцером по фиг. 2. Данные и/или информация, полученная и/или переданная посредством пользовательского устройства или устройств 214 ввода пользовательского интерфейса 206, может представлять собой данные и/или информацию любого вида в любой форме и/или формате, и может быть сохранена на машиночитаемом носителе данных, таком как примерная память 212, описанная ниже.
[0026] Пользовательский интерфейс 206 по фиг. 2 также содержит одно или несколько устройств 216 вывода, посредством которых контроллер 210 устройства 200 для автоматизированного управления штуцером предоставляет информацию и/или данные в визуальном и/или звуковом виде пользователю. Например, устройство или устройства 216 вывода могут быть реализованы в виде одного или нескольких из светодиода, сенсорного экрана и/или жидкокристаллического дисплея для предоставления визуальной информации, и/или динамика для предоставления звуковой информации. В некоторых примерах данные и/или информация, предоставленная посредством устройства или устройств 216 вывода пользовательского интерфейса 206 идентифицирует и/или указывает на измеренное и/или текущее положение штуцера штуцерной задвижки (например, на текущее положение штуцера штуцерной задвижки 110 по фиг. 1). В некоторых примерах данные и/или информация, предоставленная посредством устройства или устройств 216 вывода пользовательского интерфейса 206 идентифицирует и/или указывает на измеренное и/или текущее устьевое давление устья скважины (например, на текущее устьевое давление устья 104 скважины по фиг. 1). В некоторых примерах данные и/или команда или команды, предоставленные посредством устройства или устройств 216 вывода пользовательского интерфейса 206 идентифицируют и/или указывают на заданное значение положения штуцера и/или требуемое положение штуцера штуцерной задвижки (например, на требуемое положение штуцера штуцерной задвижки 110 по фиг. 1). В некоторых примерах данные и/или команда или команды, предоставленные посредством устройства или устройств 216 вывода пользовательского интерфейса 206 идентифицируют и/или указывают на заданное значение устьевого давления и/или требуемое устьевое давление устья скважины (например, на требуемое устьевое давление устья 104 скважины по фиг. 1). В некоторых примерах данные и/или информация, предоставленная посредством устройства или устройств 216 вывода пользовательского интерфейса 206 идентифицирует и/или указывает на выбранный режим управления (например, на режим управления положением штуцера, режим управления устьевым давлением, режим ручного управления, и т.д.) устройства 200 для автоматизированного управления штуцером по фиг. 2. Данные и/или информация, предоставленная и/или подлежащая предоставлению посредством устройства или устройств 216 вывода пользовательского интерфейса 206, может представлять собой данные и/или информацию любого вида в любой форме и/или формате, и может быть сохранена на машиночитаемом носителе данных, таком как примерная память 212, описанная ниже.
[0027] Примерный детектор 208 режима по фиг. 2 определяет, идентифицирует и/или обнаруживает режим работы устройства 200 для автоматизированного управления штуцером по фиг. 2. Например, детектор 208 режима может идентифицировать и/или обнаруживать выбор одного из множества доступных режимов работы устройства 200 для автоматизированного управления штуцером, включая, например, режим управления положением штуцера, режим управления устьевым давлением и режим ручного управления. В некоторых примерах детектор 208 режима определяет и/или обнаруживает выбор режима управления положением штуцера, режима управления устьевым давлением или режима ручного управления на основании данных и/или информации (например, разряда выбора режима, заданного значения положения штуцера, требуемого положения штуцера, кода ручного управления, и т.д.), содержащейся во входном управляющем сигнале или указываемой посредством указанного сигнала, полученного посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2. Данные идентификации режима, определенные, идентифицированные и/или обнаруженные датчиком 204 давления, могут представлять собой данные любого вида в любой форме и/или формате, и могут быть сохранены на машиночитаемом носителе данных, таком как примерная память 212, описанная ниже.
[0028] Примерный контроллер 210 по фиг. 2 может быть реализован в виде полупроводникового устройства, такого как процессор, микропроцессор или микроконтроллер. Контроллер 210 контролирует и/или управляет работой устройства 200 для автоматизированного управления штуцером по фиг. 2, гидравлического блока питания (например, гидравлического блока 106 питания по фиг. 1), функционально связанного с устройством 200 для автоматизированного управления штуцером, привода (например, привода 108 по фиг. 1), функционально связанного с гидравлическим блоком питания, и/или штуцерной задвижки (например, штуцерной задвижки 110 по фиг. 1), функционально связанной с приводом. Контроллер 210 контролирует и/или управляет устройством 200 для автоматизированного управления штуцером, гидравлическим блоком питания, приводом и/или штуцерной задвижкой на основании данных, информации и/или одного или нескольких сигналов, полученных контроллером 210 или доступ к которым осуществлен контроллером 210, от одного или нескольких из датчика 202 положения, датчика 204 давления, пользовательского интерфейса 206, детектора 208 режима и/или памяти 212, и/или на основании данных, информации и/или одного или нескольких сигналов, передаваемых контроллером 210 на одно или несколько из пользовательского интерфейса 206, детектора 208 режима, памяти 212 и/или гидравлического блока питания.
[0029] В некоторых примерах контроллер 210 по фиг. 2 определяет, получен ли входной управляющий сигнал. Например, контроллер 210 может определять, что входной управляющий сигнал получен посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2. В некоторых примерах контроллер 210 осуществляет и/или управляет контуром управления положением штуцера в ответ на определение детектором 208 режима по фиг. 2 того факта, что полученный входной управляющий сигнал указывает на выбор режима управления положением штуцера устройства 200 для автоматизированного управления штуцером по фиг. 2. В некоторых примерах контроллер 210 продолжает осуществлять и/или управлять контуром управления положением штуцера до определения контроллером 210 факта получения обновленного входного управляющего сигнала, указывающего на выбор другого режима работы (например, режима управления устьевым давлением, режима ручного управления, и т.д.) устройства 200 для автоматизированного управления штуцером по фиг. 2. В некоторых примерах контроллер 210 осуществляет и/или управляет контуром управления устьевым давлением в ответ на определение детектором 208 режима по фиг. 2 того факта, что полученный входной управляющий сигнал указывает на выбор режима управления устьевым давлением устройства 200 для автоматизированного управления штуцером по фиг. 2. В некоторых примерах контроллер 210 продолжает осуществлять и/или управлять контуром управления устьевым давлением до определения контроллером 210 факта получения обновленного входного управляющего сигнала, указывающего на выбор другого режима работы (например, режима управления положением штуцера, режима ручного управления, и т.д.) устройства 200 для автоматизированного управления штуцером по фиг. 2.
[0030] В некоторых примерах контроллер 210 по фиг. 2 определяет требуемое положение штуцера штуцерной задвижки. Например, контроллер 210 может определять требуемое положение штуцера штуцерной задвижки (например, штуцерной задвижки 110 по фиг. 1) на основании идентифицированного заданного значения положения штуцера. В некоторых примерах данные и/или информация, идентифицирующая и/или указывающая на требуемое положение штуцера (например, на заданное значение положения штуцера), может быть включена во входной управляющий сигнал, полученный посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2. В других примерах данные и/или информация, идентифицирующая и/или указывающая на требуемое положение штуцера, может быть получена посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2 отдельно от (например, до или после) полученного входного управляющего сигнала. В некоторых примерах контроллер 210 может определять требуемое положение штуцера штуцерной задвижки путем осуществления доступа, получения и/или другой идентификации данных требуемого положения штуцера (например, заданного значения положения штуцера), сохраненных в примерной памяти 212 по фиг. 2.
[0031] В некоторых примерах контроллер 210 по фиг. 2 определяет текущее положение штуцера штуцерной задвижки. Например, контроллер 210 может определять текущее положение штуцера штуцерной задвижки (например, штуцерной задвижки 110 по фиг. 1) путем осуществления доступа, получения и/или другой идентификации данных положения штока, определенного, измеренного и/или обнаруженного примерным датчиком 202 положения по фиг. 2, или данных положения штуцера, выведенных на основании указанных данных. В некоторых примерах контроллер 210 может определять текущее положение штуцера штуцерной задвижки на основании данных корреляции положения штуцера, сохраненных в примерной памяти 212 по фиг. 2. В некоторых из подобных примеров данные корреляции положения штуцера позволяют контроллеру 210 сопоставлять (например, коррелировать) положение штока штуцерной задвижки (например, положение штока 132 штуцерной задвижки 110 по фиг. 1) с соответствующим положением штуцера (например, закрыт на 50%) штуцерной задвижки.
[0032] В некоторых примерах контроллер 210 по фиг. 2 определяет разность между текущим положением штуцера штуцерной задвижки и требуемым положением штуцера штуцерной задвижки. Например, контроллер 210 может определять разность между текущим положением штуцера штуцерной задвижки (например, штуцерной задвижки 110 по фиг. 1) и требуемым положением штуцера штуцерной задвижки путем сравнения данных положения, соответствующих текущему положению штуцера, с данными положения, соответствующими требуемому положению штуцера. В некоторых примерах контроллер 210 определяет, превышает ли разность между текущим положением штуцера штуцерной задвижки и требуемым положением штуцера пороговое значение погрешности положения штуцера. Например, контроллер 210 может определять, что разность между текущим положением штуцера штуцерной задвижки и требуемым положением штуцера превышает пороговое значение погрешности положения штуцера, что указывает на необходимость корректировки текущего положения штуцера посредством одного или нескольких управляющих сигналов с целью обеспечения соответствия требуемому положению штуцера в допустимых пределах погрешности.
[0033] В некоторых примерах контроллер 210 по фиг. 2 вырабатывает один или несколько управляющих сигналов с целью корректировки текущего положения штуцера штуцерной задвижки с целью обеспечения соответствия требуемому положению штуцера. Например, контроллер 210 может вырабатывать один или несколько управляющих сигналов, приводящих к распределению гидравлической управляющей жидкости гидравлическим блоком питания (например, гидравлическим блоком 106 питания по фиг. 1 и 2) на привод (например, на привод 108 по фиг. 1), функционально связанный со штуцерной задвижкой, в результате чего привод обеспечивает перемещение штока и/или заглушки штуцерной задвижки (например, штока 132 и/или заглушки 134 штуцерной задвижки 110 по фиг. 1) из текущего положения, соответствующего текущему положению штуцера штуцерной задвижки, в требуемое положение, соответствующее требуемому положению штуцера. В некоторых примерах один или несколько управляющих сигналов, выработанных контроллером 210 и поданных в гидравлический блок питания, соответствуют разности между текущим положением штуцера штуцерной задвижки и требуемым положением штуцера. Один или несколько управляющих сигналов, выработанных контроллером 210 и поданных в гидравлический блок питания, приводят к перемещению штока и/или заглушки штуцерной задвижки в некотором направлении, что приводит к корректировке текущего положения штуцера штуцерной задвижки в направлении требуемого положения штуцера.
[0034] В некоторых примерах контроллер 210 по фиг. 2 определяет требуемое устьевое давление устья скважины. Например, контроллер 210 может определять требуемое устьевое давление устья скважины (например, устья 104 скважины по фиг. 1) на основании идентифицированного заданного значения устьевого давления. В некоторых примерах данные и/или информация, идентифицирующая и/или указывающая на требуемое устьевое давление (например, на заданное значение устьевого давления), может быть включена во входной управляющий сигнал, полученный посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2. В других примерах данные и/или информация, идентифицирующая и/или указывающая на требуемое устьевое давление, может быть получена посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2 отдельно от (например, до или после) полученного входного управляющего сигнала. В некоторых примерах контроллер 210 может определять требуемое устьевое давление устья скважины путем осуществления доступа, получения и/или другой идентификации данных требуемого устьевого давления (например, заданного значения устьевого давления), сохраненных в примерной памяти 212 по фиг. 2.
[0035] В некоторых примерах контроллер 210 по фиг. 2 определяет текущее устьевое давление устья скважины. Например, контроллер 210 может определять текущее устьевое давление устья скважины (например, устья 104 скважины по фиг. 1) путем осуществления доступа, получения и/или другой идентификации данных устьевого давления, определенного, измеренного и/или обнаруженного примерным датчиком 204 давления по фиг. 2.
[0036] В некоторых примерах контроллер 210 по фиг. 2 определяет разность между текущим устьевым давлением устья скважины и требуемым устьевым давлением устья скважины. Например, контроллер 210 может определять разность между текущим устьевым давлением устья скважины (например, устья 104 скважины по фиг. 1) и требуемым устьевым давлением устья скважины путем сравнения данных устьевого давления, соответствующих текущему устьевому давлению, с данными устьевого давления, соответствующими требуемому устьевому давлению. В некоторых примерах контроллер 210 по фиг. 2 определяет, превышает ли разность между текущим устьевым давлением устья скважины и требуемым устьевым давлением пороговое значение погрешности устьевого давления. Например, контроллер 210 может определять, что разность между текущим устьевым давлением устья скважины и требуемым устьевым давлением превышает пороговое значение погрешности устьевого давления, что указывает на необходимость корректировки текущего устьевого давления посредством одного или нескольких управляющих сигналов с целью обеспечения соответствия требуемому устьевому давлению в допустимых пределах погрешности.
[0037] В некоторых примерах контроллер 210 по фиг. 2 вырабатывает один или несколько управляющих сигналов с целью корректировки текущего устьевого давления устья скважины с целью обеспечения соответствия требуемому устьевому давлению. Например, контроллер 210 может вырабатывать один или несколько управляющих сигналов, приводящих к распределению гидравлической управляющей жидкости гидравлическим блоком питания (например, гидравлическим блоком 106 питания по фиг. 1 и 2) на привод (например, на привод 108 по фиг. 1), функционально связанный со штуцерной задвижкой (например, со штуцерной задвижкой 110 по фиг. 1), в результате чего привод обеспечивает перемещение штока и/или заглушки штуцерной задвижки (например, штока 132 и/или заглушки 134 штуцерной задвижки 110 по фиг. 1) из текущего положения, соответствующего текущему устьевому давлению устья скважины, в требуемое положение, соответствующее требуемому устьевому давлению. В некоторых примерах контроллер 210 осуществляет доступ к данным корреляции устьевого давления, сохраненным в памяти 212 по фиг. 2, с целью сопоставления (например, корреляции) положения штока штуцерной задвижки (например, положения штока 132 штуцерной задвижки 110 по фиг. 1) с соответствующим устьевым давлением устья скважины (например, с устьевым давлением устья 104 скважины по фиг. 1). В некоторых примерах один или несколько управляющих сигналов, выработанных контроллером 210 и поданных в гидравлический блок питания, соответствуют разности между текущим устьевым давлением и требуемым устьевым давлением, и/или разности между текущим положением штока, соответствующим текущему устьевому давлению, и требуемым положением штока, соответствующим требуемому устьевому давлению. Один или несколько управляющих сигналов, выработанных контроллером 210 и поданных в гидравлический блок питания, приводят к перемещению штока и/или заглушки штуцерной задвижки в некотором направлении, что приводит к корректировке текущего устьевого давления устья скважины в направлении требуемого устьевого давления.
[0038] Примерная память 212 по фиг. 2 может быть реализована в виде любого количества запоминающих устройств любого вида или видов, таких как накопитель, флэш–память, постоянное запоминающее устройство (ПЗУ) оперативное запоминающее устройство (ОЗУ), кэш–память и/или любой другой носитель данных, в котором информацию сохраняют в течение любого промежутка времени (например, в течение длительных периодов времени, постоянно, в течение кратких промежутков времени, для временной буферизации и/или для кэширования информации). Информация, сохраненная в памяти 212, может быть сохранена в виде любого формата файлов и/или структуры данных, любой схемы и/или принципа организации данных. Доступ к памяти 212 обеспечен для датчика 202 положения, датчика 204 давления, пользовательского интерфейса 206, детектора 208 режима и контроллера 210 по фиг. 2, и/или для установки 200 для автоматизированного управления штуцером по фиг. 2 в целом.
[0039] В некоторых примерах в памяти 212 по фиг. 2 сохранены данные требуемого положения штуцера (например, заданное значение положения штуцера), выведенные на основании одного или нескольких сигналов, сообщений и/или команд, полученных посредством пользовательского интерфейса 206 по фиг. 2. В некоторых примерах в памяти 212 сохранены данные текущего положения штуцера (например, измеренное положение штуцера), определенные, измеренные и/или обнаруженные посредством датчика 202 положения по фиг. 2. В некоторых примерах в памяти 212 сохранены данные корреляции положения штуцера, доступ к которым может быть обеспечен с целью сопоставления (например, корреляции) положения штока штуцерной задвижки (например, положения штока 132 штуцерной задвижки 110 по фиг. 1) с соответствующим положением штуцера (например, закрыт на 50%) штуцерной задвижки. В некоторых примерах в памяти 212 сохранено пороговое значение погрешности положения штуцера.
[0040] В некоторых примерах в памяти 212 по фиг. 2 сохранены данные требуемого устьевого давления (например, заданное значение устьевого давления), выведенные на основании одного или нескольких сигналов, сообщений и/или команд, полученных посредством пользовательского интерфейса 206 по фиг. 2. В некоторых примерах в памяти 212 сохранены данные текущего устьевого давления (например, измеренное устьевое давление), определенные, измеренные и/или обнаруженные посредством датчика 204 давления по фиг. 2. В некоторых примерах в памяти 212 сохранены данные корреляции устьевого давления, доступ к которым может быть обеспечен с целью сопоставления (например, корреляции) положения штока штуцерной задвижки (например, положения штока 132 штуцерной задвижки 110 по фиг. 1) с соответствующим устьевым давлением устья скважины (например, с устьевым давлением устья 104 скважины по фиг. 1). В некоторых примерах в памяти 212 сохранено пороговое значение погрешности устьевого давления.
[0041] В некоторых примерах устройство 200 для автоматизированного управления положением штуцера по фиг. 2 реализует и/или функционально связано (например, электрически связано) с модулем–диспетчером, отслеживающим (например, определяющим, измеряющим и/или обнаруживающим) условия забоя скважины и поверхности скважины с целью предотвращения превышения эксплуатационных ограничений бурового оборудования. В некоторых из подобных примеров данные, полученные посредством модуля–диспетчера, могут быть получены и анализированы устройством 200 для автоматизированного управления штуцером по фиг. 2. Устройство 200 для автоматизированного управления штуцером по фиг. 2 может управлять гидравлическим блоком 106 питания частично на основании данных, полученных от модуля–диспетчера, что позволяет обеспечить безопасность при работе с оборудованием с одновременным обеспечением автоматизированного управления положением штуцера и устьевым давлением.
[0042] Несмотря на то, что примерный вариант реализации примерного устройства 200 для автоматизированного управления штуцером проиллюстрирован на фиг. 2, один или несколько элементов, процессов и/или устройств, проиллюстрированных на фиг. 2, могут быть объединены, разделены, перегруппированы, опущены, исключены и/или реализованы любым другим образом. Кроме того, примерный датчик 202 положения, примерный датчик 204 давления, примерный пользовательский интерфейс 906, примерный детектор 208 режима, примерный контроллер 210 и/или примерная память 214 по фиг. 2 могут быть реализованы аппаратным обеспечением, программным обеспечением, встроенным программным обеспечением и/или любой комбинацией аппаратного обеспечения, программного обеспечения и/или встроенного программного обеспечения. Таким образом, например, любое из примерного датчика 202 положения, примерного датчика 204 давления, примерного пользовательского интерфейса 906, примерного детектора 208 режима, примерного контроллера 210 и/или примерной памяти 214 по фиг. 2 может быть реализовано в виде одной или нескольких аналоговых или цифровых схем, логических схем, программируемых процессоров, специализированных интегральных микросхем (ASIC), программируемых логических устройств (PLD) и/или программируемых пользователем логических устройств (FPLD). При чтении любого из пунктов формулы изобретения, касающихся устройства или системы по настоящему патенту, для охвата исключительно программной и/или встроенной программной реализации, по меньшей мере одно из примерного датчика 202 положения, примерного датчика 204 давления, примерного пользовательского интерфейса 906, примерного детектора 208 режима, примерного контроллера 210 и/или примерной памяти 214 по фиг. 2 четко определено как включающее материальное машиночитаемое устройство хранения или запоминающий диск, такой как память, универсальный цифровой диск (DVD), компакт–диск (CD), диск Blu–ray, и т.д., на котором сохранено программное обеспечение и/или встроенное программное обеспечение. Далее, примерное устройство 200 для автоматизированного управления штуцером по фиг. 2 может содержать один или несколько элементов, процессов и/или устройств в дополнение к проиллюстрированным на фиг. 2 или вместо них, и/или может содержать более одного из любых или всех проиллюстрированных элементов, процессов и устройств.
[0043] Функциональная схема, отражающая примерный способ, который может быть выполнен примерным устройством 200 для автоматизированного управления штуцером по фиг. 2 с целью избирательного управления положением штуцера штуцерной задвижки или устьевым давлением устья скважины, показана на фиг. 3A и 3B. В данном примере способ может быть реализован посредством машиночитаемых команд, содержащих одну или несколько программ, предназначенных для исполнения посредством процессора, такого как примерный процессор 402, показанный в примерной процессорной платформе 400, описанной ниже со ссылкой на фиг. 4. Одна или несколько программ могут быть реализованы в виде программного обеспечения, сохраненного на материальном машиночитаемом запоминающем носителе данных, таком как компакт–диск (CD–ROM), гибкий диск, жесткий диск, универсальный цифровой диск (DVD), диск Blu–ray, или память, связанная с процессором 402, но вся программа или программы и/или их часть в другом варианте могут быть выполнены посредством устройства, отличного от процессора 402, и/или могут быть реализованы в виде встроенного программного обеспечения или специализированного аппаратного обеспечения. Кроме того, несмотря на то, что примерная программа или программы описаны со ссылкой на функциональную схему, проиллюстрированную на фиг. 3A и 3B, может быть использовано множество других автоматизированных способов для избирательного управления положением штуцера штуцерной задвижки или устьевым давлением устья скважины. Например, может быть изменен порядок выполнения блоков и/или некоторые из описанных блоков могут быть изменены, исключены или объединены.
[0044] Согласно вышеприведенному описанию, примерный способ по фиг. 3A и 3B может быть реализован посредством кодированных команд (например, компьютерных и/или машиночитаемых команд), сохраненных на материальном машиночитаемом носителе данных, таком как жесткий диск, флэш–память, постоянное запоминающее устройство (ПЗУ), компакт–диск (CD), универсальный цифровой диск (DVD), кэш–память, оперативное запоминающее устройство (ОЗУ) и/или любое другое запоминающее устройство или запоминающий диск, в котором информацию сохраняют в течение любого промежутка времени (например, в течение длительных периодов времени, постоянно, в течение кратких промежутков времени, для временной буферизации и/или для кэширования информации). Используемый в настоящем документе термин "материальный машиночитаемый носитель данных" четко определен включающим машиночитаемое запоминающее устройство и/или запоминающий диск любого вида, исключающим распространяемые сигналы и исключающим среды передачи данных. В настоящем документе термины "материальный компьютерный машиночитаемый носитель данных" и "материальный машиночитаемый носитель данных" взаимозаменяемы. В другом варианте или дополнительно, примерный способ по фиг. 3A и 3B может быть реализован посредством кодированных команд (например, компьютерных и/или машиночитаемых команд), сохраненных на энергонезависимом компьютерном и/или машиночитаемом носителе, таком как жесткий диск, флэш–память, постоянное запоминающее устройство, компакт–диск, универсальный цифровой диск, кэш–память, оперативное запоминающее устройство и/или любое другое запоминающее устройство или запоминающий диск, в котором информацию сохраняют в течение любого промежутка времени (например, в течение длительных периодов времени, постоянно, в течение кратких промежутков времени, для временной буферизации и/или для кэширования информации). Используемый в настоящем документе термин "энергонезависимый машиночитаемый носитель" четко определен включающим машиночитаемое запоминающее устройство и/или запоминающий диск любого вида, исключающим распространяемые сигналы и исключающим среды передачи данных. Используемое в данном документе выражение "по меньшей мере" использовано в качестве переходного выражения в преамбуле формулы изобретения, оно является не окончательным, как и выражение "содержащий" является не окончательным.
[0045] На фиг. 3A и 3B показана функциональная схема, отражающая примерный способ 300, который может быть выполнен примерным устройством 200 для автоматизированного управления штуцером по фиг. 2 с целью избирательного управления положением штуцера штуцерной задвижки или устьевым давлением устья скважины. Примерный способ 300 начинается, когда примерный контроллер 210 по фиг. 2 определяет, получен ли входной управляющий сигнал (блок 302). Например, контроллер 210 может определять, что входной управляющий сигнал получен посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2. Если на блоке 302 контроллер 210 определяет, что входной управляющий сигнал не получен, управление по примерному способу 300 остается на блоке 302. Напротив, если на блоке 302 контроллер 210 определяет, что входной управляющий сигнал получен, управление по примерному способу 300 переходит к блоку 304.
[0046] На блоке 304 примерный детектор 208 режима по фиг. 2 определяет, указывает ли входной управляющий сигнал на выбор режима управления положением штуцера (блок 304). Например, детектор 208 режима может определять, что входной управляющий сигнал, обнаруженный на блоке 302 способа 300, указывает на выбор режима управления положением штуцера на основании данных и/или информации (например, разряда выбора режима, заданного значения положения штуцера, требуемого положения штуцера, и т.д.), содержащейся во входном управляющем сигнале или указываемой посредством указанного сигнала. Если на блоке 304 детектор 208 режима определяет, что входной управляющий сигнал указывает на выбор режима управления положением штуцера, управление по примерному способу 300 переходит к блоку 306. Напротив, если на блоке 304 детектор 208 режима определяет, что входной управляющий сигнал не указывает на выбор режима управления положением штуцера, управление по примерному способу 300 переходит к блоку 320.
[0047] На блоке 306 примерный контроллер 210 по фиг. 2 определяет требуемое положение штуцера штуцерной задвижки (блок 306). Например, контроллер 210 может определять требуемое положение штуцера штуцерной задвижки (например, штуцерной задвижки 110 по фиг. 1) на основании идентифицированного заданного значения положения штуцера. В некоторых примерах данные и/или информация, идентифицирующая и/или указывающая на требуемое положение штуцера (например, на заданное значение положения штуцера), может быть включена во входной управляющий сигнал, обнаруженный на блоке 302 способа 300. В других примерах данные и/или информация, идентифицирующая и/или указывающая на требуемое положение штуцера, может быть получена посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2 отдельно от (например, до или после) входного управляющего сигнала, обнаруженного на блоке 302 способа 300. В некоторых примерах контроллер 210 определяет требуемое положение штуцера штуцерной задвижки путем осуществления доступа, получения и/или другой идентификации данных требуемого положения штуцера (например, заданного значения положения штуцера), сохраненных в примерной памяти 212 по фиг. 2. После блока 306 управление по примерному способу 300 переходит к блоку 308.
[0048] На блоке 308 примерный контроллер 210 по фиг. 2 определяет текущее положение штуцера штуцерной задвижки (блок 308). Например, контроллер 210 может определять текущее положение штуцера штуцерной задвижки (например, штуцерной задвижки 110 по фиг. 1) путем осуществления доступа, получения и/или другой идентификации данных положения штока, определенного, измеренного и/или обнаруженного примерным датчиком 202 положения по фиг. 2, или данных положения штуцера, выведенных на основании указанных данных. В некоторых примерах контроллер 210 может определять текущее положение штуцера штуцерной задвижки на основании данных корреляции положения штуцера, сохраненных в примерной памяти 212 по фиг. 2. В некоторых из подобных примеров данные корреляции положения штуцера позволяют контроллеру 210 сопоставлять (например, коррелировать) положение штока штуцерной задвижки (например, положение штока 132 штуцерной задвижки 110 по фиг. 1) с соответствующим положением штуцера (например, закрыт на 50%) штуцерной задвижки. После блока 308 управление по примерному способу 300 переходит к блоку 310.
[0049] На блоке 310 примерный контроллер 210 по фиг. 2 определяет разность между текущим положением штуцера и требуемым положением штуцера (блок 310). Например, контроллер 210 может определять разность между текущим положением штуцера и требуемым положением штуцера путем сравнения данных положения, соответствующих текущему положению штуцера, с данными положения, соответствующими требуемому положению штуцера. После блока 310 управление по примерному способу 300 переходит к блоку 312.
[0050] На блоке 312 примерный контроллер 210 по фиг. 2 определяет, превышает ли разность между текущим положением штуцера и требуемым положением штуцера пороговое значение погрешности положения штуцера (блок 312). Например, контроллер 210 может определять, что разность между текущим положением штуцера и требуемым положением штуцера превышает пороговое значение погрешности положения штуцера, что указывает на необходимость корректировки текущего положения штуцера посредством одного или нескольких управляющих сигналов с целью обеспечения соответствия требуемому положению штуцера в допустимых пределах погрешности. Если на блоке 312 контроллер 210 определяет, что разность между текущим положением штуцера и требуемым положением штуцера не превышает пороговое значение положения штуцера, управление по примерному способу 300 возвращается к блоку 308. Напротив, если на блоке 312 контроллер 210 определяет, что разность между текущим положением штуцера и требуемым положением штуцера превышает пороговое значение положения штуцера, управление по примерному способу 300 переходит к блоку 314.
[0051] На блоке 314 примерный контроллер 210 по фиг. 2 вырабатывает один или несколько управляющих сигналов с целью корректировки текущего положения штуцера штуцерной задвижки с целью обеспечения соответствия требуемому положению штуцера (блок 314). Например, контроллер 210 может вырабатывать один или несколько управляющих сигналов, приводящих к распределению гидравлической управляющей жидкости гидравлическим блоком питания (например, гидравлическим блоком 106 питания по фиг. 1 и 2) на привод (например, на привод 108 по фиг. 1), функционально связанный со штуцерной задвижкой, в результате чего привод обеспечивает перемещение штока и/или заглушки штуцерной задвижки (например, штока 132 и/или заглушки 134 штуцерной задвижки 110 по фиг. 1) из текущего положения, соответствующего текущему положению штуцера штуцерной задвижки, в требуемое положение, соответствующее требуемому положению штуцера. В некоторых примерах один или несколько управляющих сигналов, выработанных контроллером 210 и поданных в гидравлический блок питания, соответствуют разности между текущим положением штуцера и требуемым положением штуцера, и/или разности между текущим положением штока, соответствующим текущему положению штуцера, и требуемым положением штока, соответствующим требуемому положению штуцера. Один или несколько управляющих сигналов, выработанных контроллером 210 и поданных в гидравлический блок питания, приводят к перемещению штока и/или заглушки штуцерной задвижки в некотором направлении, что приводит к корректировке текущего положения штуцера штуцерной задвижки в направлении требуемого положения штуцера. После блока 314 управление по примерному способу 300 переходит к блоку 316.
[0052] На блоке 316 примерный контроллер 210 по фиг. 2 определяет, получен ли обновленный входной управляющий сигнал (блок 316). Например, контроллер 210 может определять, что обновленный входной управляющий сигнал (например, более недавний входной управляющий сигнал по сравнению со входным управляющим сигналом, обнаруженным на блоке 302 способа 300) получен посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2. Если на блоке 316 контроллер 210 определяет, что обновленный входной управляющий сигнал не получен, управление по примерному способу 300 возвращается к блоку 308. Напротив, если на блоке 316 контроллер 210 определяет, что обновленный входной управляющий сигнал получен, управление по примерному способу 300 переходит к блоку 318.
[0053] На блоке 318 примерный детектор 208 режима по фиг. 2 определяет, указывает ли обновленный входной управляющий сигнал на выбор режима ручного управления (блок 318). Например, детектор 208 режима может определять, что обновленный входной управляющий сигнал, обнаруженный на блоке 316 способа 300, указывает на выбор режима ручного управления на основании данных и/или информации (например, разряда выбора режима, кода ручного управления, и т.д.), содержащейся в обновленном входном управляющем сигнале или указываемой посредством указанного сигнала. Если на блоке 318 детектор 208 режима определяет, что обновленный входной управляющий сигнал не указывает на выбор режима ручного управления, управление по примерному способу 300 возвращается к блоку 304. Напротив, если на блоке 318 детектор 208 режима определяет, что обновленный входной управляющий сигнал указывает на выбор режима ручного управления, примерный способ 300 заканчивается.
[0054] На блоке 320 примерный детектор 208 режима по фиг. 2 определяет, указывает ли входной управляющий сигнал на выбор режима управления устьевым давлением (блок 320). Например, детектор 208 режима может определять, что входной управляющий сигнал (например, входной управляющий сигнал, обнаруженный на блоке 302, обновленный входной управляющий сигнал, обнаруженный на блоке 316, и т.д.) указывает на выбор режима управления устьевым давлением на основании данных и/или информации (например, разряда выбора режима, заданного значения устьевого давления, требуемого устьевого давления, и т.д.), содержащейся во входном управляющем сигнале или указываемой посредством указанного сигнала. Если на блоке 320 детектор 208 режима определяет, что входной управляющий сигнал указывает на выбор режима управления устьевым давлением, управление по примерному способу 300 переходит к блоку 322. Напротив, если на блоке 320 детектор 208 режима определяет, что входной управляющий сигнал не указывает на выбор режима управления устьевым давлением, примерный способ 300 заканчивается.
[0055] На блоке 322 примерный контроллер 210 по фиг. 2 определяет требуемое устьевое давление устья скважины (блок 322). Например, контроллер 210 может определять требуемое устьевое давление устья скважины (например, устья 104 скважины по фиг. 1) на основании идентифицированного заданного значения устьевого давления. В некоторых примерах данные и/или информация, идентифицирующая и/или указывающая на требуемое устьевое давление (например, на заданное значение устьевого давления), может быть включена во входной управляющий сигнал, обнаруженный на блоке 302 способа 300. В других примерах данные и/или информация, идентифицирующая и/или указывающая на требуемое устьевое давление, может быть получена посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2 отдельно от (например, до или после) входного управляющего сигнала, обнаруженного на блоке 302 способа 300. В некоторых примерах контроллер 210 определяет требуемое устьевое давление устья скважины путем осуществления доступа, получения и/или другой идентификации данных требуемого устьевого давления (например, заданного значения устьевого давления), сохраненных в примерной памяти 212 по фиг. 2. После блока 322 управление по примерному способу 300 переходит к блоку 324.
[0056] На блоке 324 примерный контроллер 210 по фиг. 2 определяет текущее устьевое давление устья скважины (блок 324). Например, контроллер 210 может определять текущее устьевое давление устья скважины (например, устья 104 скважины по фиг. 1) путем осуществления доступа, получения и/или другой идентификации данных устьевого давления, определенного, измеренного и/или обнаруженного примерным датчиком 204 давления по фиг. 2. После блока 324 управление по примерному способу 300 переходит к блоку 326.
[0057] На блоке 326 примерный контроллер 210 по фиг. 2 определяет разность между текущим устьевым давлением и требуемым устьевым давлением (блок 326). Например, контроллер 210 может определять разность между текущим устьевым давлением и требуемым устьевым давлением путем сравнения данных устьевого давления, соответствующих текущему устьевому давлению, с данными устьевого давления, соответствующими требуемому устьевому давлению. После блока 326 управление по примерному способу 300 переходит к блоку 328.
[0058] На блоке 328 примерный контроллер 210 по фиг. 2 определяет, превышает ли разность между текущим устьевым давлением и требуемым устьевым давлением пороговое значение погрешности устьевого давления (блок 328). Например, контроллер 210 может определять, что разность между текущим устьевым давлением и требуемым устьевым давлением превышает пороговое значение погрешности устьевого давления, что указывает на необходимость корректировки текущего устьевого давления посредством одного или нескольких управляющих сигналов с целью обеспечения соответствия требуемому устьевому давлению в допустимых пределах погрешности. Если на блоке 328 контроллер 210 определяет, что разность между текущим устьевым давлением и требуемым устьевым давлением не превышает пороговое значение устьевого давления, управление по примерному способу 300 возвращается к блоку 324. Напротив, если на блоке 328 контроллер 210 определяет, что разность между текущим устьевым давлением и требуемым устьевым давлением превышает пороговое значение устьевого давления, управление по примерному способу 300 переходит к блоку 330.
[0059] На блоке 330 примерный контроллер 210 по фиг. 2 вырабатывает один или несколько управляющих сигналов с целью корректировки текущего устьевого давления устья скважины с целью обеспечения соответствия требуемому устьевому давлению (блок 330). Например, контроллер 210 может вырабатывать один или несколько управляющих сигналов, приводящих к распределению гидравлической управляющей жидкости гидравлическим блоком питания (например, гидравлическим блоком 106 питания по фиг. 1 и 2) на привод (например, на привод 108 по фиг. 1), функционально связанный со штуцерной задвижкой (например, со штуцерной задвижкой 110 по фиг. 1), в результате чего привод обеспечивает перемещение штока и/или заглушки штуцерной задвижки (например, штока 132 и/или заглушки 134 штуцерной задвижки 110 по фиг. 1) из текущего положения, соответствующего текущему устьевому давлению устья скважины, в требуемое положение, соответствующее требуемому устьевому давлению. В некоторых примерах контроллер 210 осуществляет доступ к данным корреляции устьевого давления, сохраненным в памяти 212 по фиг. 2, с целью сопоставления (например, корреляции) положения штока штуцерной задвижки (например, положения штока 132 штуцерной задвижки 110 по фиг. 1) с соответствующим устьевым давлением устья скважины (например, с устьевым давлением устья 104 скважины по фиг. 1). В некоторых примерах один или несколько управляющих сигналов, выработанных контроллером 210 и поданных в гидравлический блок питания, соответствуют разности между текущим устьевым давлением и требуемым устьевым давлением, и/или разности между текущим положением штока, соответствующим текущему устьевому давлению, и требуемым положением штока, соответствующим требуемому устьевому давлению. Один или несколько управляющих сигналов, выработанных контроллером 210 и поданных в гидравлический блок питания, приводят к перемещению штока и/или заглушки штуцерной задвижки в некотором направлении, что приводит к корректировке текущего устьевого давления устья скважины в направлении требуемого устьевого давления. После блока 330 управление по примерному способу 300 переходит к блоку 332.
[0060] На блоке 332 примерный контроллер 210 по фиг. 2 определяет, получен ли обновленный входной управляющий сигнал (блок 332). Например, контроллер 210 может определять, что обновленный входной управляющий сигнал (например, более недавний входной управляющий сигнал по сравнению со входным управляющим сигналом, обнаруженным на блоке 302 способа 300) получен посредством одного или нескольких из устройств 214 ввода пользовательского интерфейса 206 по фиг. 2. Если на блоке 332 контроллер 210 определяет, что обновленный входной управляющий сигнал не получен, управление по примерному способу 300 возвращается к блоку 324. Напротив, если на блоке 332 контроллер 210 определяет, что обновленный входной управляющий сигнал получен, управление по примерному способу 300 переходит к блоку 334.
[0061] На блоке 334 примерный детектор 208 режима по фиг. 2 определяет, указывает ли обновленный входной управляющий сигнал на выбор режима ручного управления (блок 334). Например, детектор 208 режима может определять, что обновленный входной управляющий сигнал, обнаруженный на блоке 332 способа 300, указывает на выбор режима ручного управления на основании данных и/или информации (например, разряда выбора режима), содержащейся в обновленном входном управляющем сигнале или указываемой посредством указанного сигнала. Если на блоке 334 детектор 208 режима определяет, что обновленный входной управляющий сигнал не указывает на выбор режима ручного управления, управление по примерному способу 300 возвращается к блоку 304. Напротив, если на блоке 334 детектор 208 режима определяет, что обновленный входной управляющий сигнал указывает на выбор режима ручного управления, примерный способ 300 заканчивается.
[0062] На фиг. 4 показана примерная процессорная платформа 400, выполненная с возможностью выполнения команд с целью реализации примерного способа 300 по фиг. 3A и 3B и примерного устройства 200 для автоматизированного управления штуцером по фиг. 2. Процессорная платформа 400 по проиллюстрированному примеру содержит процессор 402. Процессор 402 по проиллюстрированному примеру представляет собой аппаратное обеспечение. Например, процессор 402 может быть реализован посредством одной или нескольких интегральных схем, логических схем, микропроцессоров или контроллеров любого требуемого семейства или производителя. Процессор 402 по проиллюстрированному примеру содержит локальную память 404 (например, кэш–память). Процессор 402 также содержит примерный детектор 208 режима и примерный контроллер 210 по фиг. 2.
[0063] Процессор 402 по проиллюстрированному примеру связан с одним или несколькими примерными датчиками 406 посредством шины 408. Примерные датчики 406 включают примерный датчик 202 положения и примерный датчик 204 давления по фиг. 2.
[0064] Процессор 402 по проиллюстрированному примеру также связан с основной памятью, содержащей энергозависимую память 410 и энергонезависимую память 412, посредством шины 408. Энергозависимая память 410 может быть реализована посредством синхронного динамического запоминающего устройства с произвольной выборкой (SDRAM), динамического запоминающего устройства с произвольной выборкой (DRAM), динамического запоминающего устройства с произвольной выборкой компании RAMBUS (RDRAM) и/или запоминающего устройства с произвольным доступом любого другого вида. Энергонезависимая память 412 может быть реализована посредством флэш–памяти и/или запоминающего устройства любого другого требуемого вида. Доступом к энергозависимой памяти 410 и энергонезависимой памяти 412 управляет контроллер памяти.
[0065] Процессор 402 по проиллюстрированному примеру также связан с одним или несколькими массовыми запоминающими устройствами 414 для хранения программного обеспечения и/или данных. Примеры подобных массовых запоминающих устройств 414 включают накопители на гибких дисках, накопители на жестких дисках, накопители на компакт–дисках, накопители на дисках Blu–ray, системы RAID и накопители на цифровых универсальных дисках (DVD). В проиллюстрированном примере массовое запоминающее устройство 414 содержит примерную память 212 по фиг. 2.
[0066] Процессорная платформа 400 по проиллюстрированному примеру также содержит схему 416 пользовательского интерфейса. Схема 416 пользовательского интерфейса может быть реализована посредством стандарта интерфейса любого вида, такого как интерфейс Ethernet, универсальная последовательная шина (USB), и/или последовательный интерфейс PCI express. В проиллюстрированном примере одно или несколько устройств 214 ввода связаны со схемой 416 пользовательского интерфейса. Устройство или устройства 214 ввода предоставляют пользователю возможность вводить данные и команды в процессор 402. Устройство или устройства ввода 214 могут быть реализованы, например, посредством кнопки, переключателя, шкальной ручки, клавиатуры, мыши, сенсорного экрана, звукового датчика, камеры (фото– или видео–), сенсорной панели, шарового манипулятора, манипулятора Isopoint, системы распознавания речи, микрофона и/или жидкокристаллического дисплея. Со схемой 416 пользовательского интерфейса по проиллюстрированному примеру также связаны одно или несколько устройств 216 вывода. Устройство или устройства вывода 216 могут быть реализованы, например, посредством светодиода, органического светодиода, жидкокристаллического дисплея, сенсорного экрана и/или динамика. Соответственно, схема 416 пользовательского интерфейса по проиллюстрированному примеру может содержать графический драйвер, такой как микросхема и/или процессор графического драйвера. В проиллюстрированном примере устройство или устройства 214 ввода, устройство или устройства 216 вывода и схема 416 пользовательского интерфейса в совокупности образуют примерный пользовательский интерфейс 206 по фиг. 2.
[0067] Процессорная платформа 400 по проиллюстрированному примеру также содержит схему 418 сетевого интерфейса. Схема 418 сетевого интерфейса может быть реализована посредством стандарта интерфейса любого вида, такого как интерфейс Ethernet, универсальная последовательная шина (USB), и/или последовательный интерфейс PCI express. В проиллюстрированном примере схема 418 сетевого интерфейса содействует обмену данными и/или сигналами с внешними машинами посредством сети 420. В некоторых примерах содействие работе сети 420 может быть обеспечено посредством токовой петли 4–20 мА и/или посредством одного или нескольких протоколов связи, включая, например, сетевую шину Foundation Fieldbus, магистральный адресуемый дистанционный датчик (протокол HART), протокол TCP/IP, протокол Profinet, протокол Modbus и/или Ethernet.
[0068] Кодированные команды 422 для реализации способа 300 по фиг. 3A и 3B могут быть сохранены в локальной памяти 404, в энергозависимой памяти 410, в энергонезависимой памяти 412, в массовом запоминающем устройстве 414 и/или на съемном материальном машиночитаемом носителе данных, таком как диск CD или DVD.
[0069] Из настоящего документа очевидно, что раскрытые устройство и способы автоматизированного управления штуцером обеспечивают множество преимуществ по сравнению с известными системами управления штуцером. Например, реализация раскрытых устройства и способов автоматизированного управления штуцером обеспечивает возможность избирательного управления устьевым давлением устья скважины посредством контура управления устьевым давлением или положением штуцера штуцерной задвижки посредством контура управления положением штуцера. Соответственно, реализация раскрытых устройства и способов автоматизированного управления штуцером позволяет уменьшить степень вмешательства человека, необходимого для поддержания устьевого давления устья скважины и/или положения штуцера штуцерной задвижки в пределах требуемого значения или значений, что является преимуществом. Уменьшение степени вмешательства человека приводит к снижению вероятности подвергания человека воздействию условий скважины (например, неуправляемого выброса), а также к снижению эксплуатационного риска, связанного с ошибками, вызванными человеческим фактором.
[0070] Вышеуказанные преимущества и/или положительные свойства достинуты посредством раскрытых устройства и способов автоматизированного управления штуцером. В некоторых примерах раскрыто устройство для автоматического управления штуцерной задвижкой. В некоторых раскрытых примерах устройство содержит контроллер. В некоторых раскрытых примерах контроллер выполнен с возможностью управления положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы. В некоторых раскрытых примерах контроллер выполнен с возможностью управления устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы. В некоторых раскрытых примерах устье скважины функционально связано со штуцерной задвижкой.
[0071] В некоторых раскрытых примерах устройства контроллер в ходе управления положением штуцера штуцерной задвижки посредством первого контура управления выполнен с возможностью определения требуемого положения штуцера штуцерной задвижки и определения текущего положения штуцера штуцерной задвижки. В некоторых раскрытых примерах устройства контроллер в ходе управления положением штуцера штуцерной задвижки посредством первого контура управления также выполнен с возможностью выработки управляющего сигнала в ответ на определение того факта, что разность между текущим положением штуцера и требуемым положением штуцера превышает пороговое значение погрешности положения штуцера. В некоторых раскрытых примерах выработанный управляющий сигнал способен обеспечивать корректировку текущего положения штуцера штуцерной задвижки посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому положению штуцера.
[0072] В некоторых раскрытых примерах устройства контроллер в ходе управления устьевым давлением устья скважины посредством второго контура управления выполнен с возможностью определения требуемого устьевого давления устья скважины и определения текущего устьевого давления устья скважины. В некоторых раскрытых примерах устройства контроллер в ходе управления устьевым давлением устья скважины посредством второго контура управления также выполнен с возможностью выработки управляющего сигнала в ответ на определение того факта, что разность между текущим устьевым давлением и требуемым устьевым давлением превышает пороговое значение погрешности устьевого давления. В некоторых раскрытых примерах выработанный управляющий сигнал способен обеспечивать корректировку текущего устьевого давления устья скважины посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому устьевому давлению путем корректировки текущего положения штуцера штуцерной задвижки.
[0073] В некоторых раскрытых примерах устройства контроллер также выполнен с возможностью управления положением штуцера штуцерной задвижки посредством первого контура управления до обнаружения выбора второго из множества режимов работы или выбора третьего из множества режимов работы. В некоторых раскрытых примерах устройства контроллер также выполнен с возможностью управления устьевым давлением устья скважины посредством второго контура управления до обнаружения выбора первого из множества режимов работы или выбора третьего из множества режимов работы. В некоторых раскрытых примерах третий из множества режимов работы представляет собой режим ручного управления.
[0074] В некоторых раскрытых примерах устройство также содержит пользовательский интерфейс для получения входных управляющих сигналов, связанных с автоматическим управлением штуцерной задвижкой. В некоторых раскрытых примерах устройство также содержит детектор режима для обнаружения выбора соответствующего одного из первого, второго и третьего из множества режимов работы на основании данных идентификации режима, включенных в соответствующие входные управляющие сигналы, полученные посредством пользовательского интерфейса. В некоторых из раскрытых примеров данные идентификации режима содержат по меньшей мере одно из разряда выбора режима, заданного значения положения штуцера, заданного значения устьевого давления или кода ручного управления.
[0075] В некоторых примерах раскрыт способ автоматического управления штуцерной задвижкой. В некоторых раскрытых примерах способ включает управление положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы. В некоторых раскрытых примерах способ включает управление устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы. В некоторых раскрытых примерах устье скважины функционально связано со штуцерной задвижкой.
[0076] В некоторых раскрытых примерах способа управление положением штуцера штуцерной задвижки посредством первого контура управления включает определение требуемого положения штуцера штуцерной задвижки и определение текущего положения штуцера штуцерной задвижки. В некоторых раскрытых примерах способа управление положением штуцера штуцерной задвижки посредством первого контура управления также включает выработку управляющего сигнала в ответ на определение того факта, что разность между текущим положением штуцера и требуемым положением штуцера превышает пороговое значение погрешности положения штуцера. В некоторых раскрытых примерах выработанный управляющий сигнал способен обеспечивать корректировку текущего положения штуцера штуцерной задвижки посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому положению штуцера.
[0077] В некоторых раскрытых примерах способа управление устьевым давлением устья скважины посредством второго контура управления включает определение требуемого устьевого давления устья скважины и определение текущего устьевого давления устья скважины. В некоторых раскрытых примерах способа управление устьевым давлением устья скважины посредством второго контура управления включает выработку управляющего сигнала в ответ на определение того факта, что разность между текущим устьевым давлением и требуемым устьевым давлением превышает пороговое значение погрешности устьевого давления. В некоторых раскрытых примерах выработанный управляющий сигнал способен обеспечивать корректировку текущего устьевого давления устья скважины посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому устьевому давлению путем корректировки текущего положения штуцера штуцерной задвижки.
[0078] В некоторых раскрытых примерах способ также включает управление положением штуцера штуцерной задвижки посредством первого контура управления до обнаружения выбора второго из множества режимов работы или выбора третьего из множества режимов работы. В некоторых раскрытых примерах способ также включает управление устьевым давлением устья скважины посредством второго контура управления до обнаружения выбора первого из множества режимов работы или выбора третьего из множества режимов работы. В некоторых раскрытых примерах третий из множества режимов работы представляет собой режим ручного управления.
[0079] В некоторых раскрытых примерах способ также включает получение посредством пользовательского интерфейса входных управляющих сигналов, связанных с автоматическим управлением штуцерной задвижкой. В некоторых раскрытых примерах способ также включает обнаружение выбора соответствующего одного из первого, второго и третьего из множества режимов работы на основании данных идентификации режима, включенных в соответствующие входные управляющие сигналы, полученные посредством пользовательского интерфейса. В некоторых из раскрытых примеров данные идентификации режима содержат по меньшей мере одно из разряда выбора режима, заданного значения положения штуцера, заданного значения устьевого давления или кода ручного управления.
[0080] В некоторых примерах раскрыт материальный машиночитаемый носитель данных, содержащий команды. В некоторых раскрытых примерах исполнение команд приводит к выполнению контроллером управления положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы. В некоторых раскрытых примерах исполнение команд приводит к выполнению контроллером управления устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы. В некоторых раскрытых примерах устье скважины функционально связано со штуцерной задвижкой.
[0081] В некоторых раскрытых примерах материального машиночитаемого носителя данных исполнение команд приводит к определению контроллером, управляющим положением штуцера штуцерной задвижки посредством первого контура управления, требуемого положения штуцера штуцерной задвижки и текущего положения штуцера штуцерной задвижки. В некоторых раскрытых примерах материального машиночитаемого носителя данных исполнение команд приводит к выработке контроллером, управляющим положением штуцера штуцерной задвижки посредством первого контура управления, управляющего сигнала в ответ на определение того факта, что разность между текущим положением штуцера и требуемым положением штуцера превышает пороговое значение погрешности положения штуцера. В некоторых раскрытых примерах выработанный управляющий сигнал способен обеспечивать корректировку текущего положения штуцера штуцерной задвижки посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому положению штуцера.
[0082] В некоторых раскрытых примерах материального машиночитаемого носителя данных исполнение команд приводит к определению контроллером, управляющим устьевым давлением устья скважины посредством второго контура управления, требуемого устьевого давления устья скважины и текущего устьевого давления устья скважины. В некоторых раскрытых примерах материального машиночитаемого носителя данных исполнение команд приводит к выработке контроллером, управляющим устьевым давлением устья скважины посредством второго контура управления, управляющего сигнала в ответ на определение того факта, что разность между текущим устьевым давлением и требуемым устьевым давлением превышает пороговое значение погрешности устьевого давления. В некоторых раскрытых примерах выработанный управляющий сигнал способен обеспечивать корректировку текущего устьевого давления устья скважины посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому устьевому давлению путем корректировки текущего положения штуцера штуцерной задвижки.
[0083] В некоторых раскрытых примерах материального машиночитаемого носителя данных исполнение команд приводит к выполнению контроллером управления положением штуцера штуцерной задвижки посредством первого контура управления до обнаружения выбора второго из множества режимов работы или выбора третьего из множества режимов работы. В некоторых раскрытых примерах материального машиночитаемого носителя данных исполнение команд приводит к выполнению контроллером управления устьевым давлением устья скважины посредством второго контура управления до обнаружения выбора первого из множества режимов работы или выбора третьего из множества режимов работы. В некоторых раскрытых примерах третий из множества режимов работы представляет собой режим ручного управления.
[0084] В некоторых раскрытых примерах материального машиночитаемого носителя данных исполнение команд приводит к обнаружению контроллером выбора соответствующего одного из первого, второго и третьего из множества режимов работы на основании данных идентификации режима, включенных в соответствующие входные управляющие сигналы, полученные посредством пользовательского интерфейса. В некоторых раскрытых примерах соответствующие входные управляющие сигналы связаны с автоматическим управлением штуцерной задвижкой. В некоторых из раскрытых примеров данные идентификации режима содержат по меньшей мере одно из разряда выбора режима, заданного значения положения штуцера, заданного значения устьевого давления или кода ручного управления.
[0085] В некоторых раскрытых примерах штуцер может быть использован в качестве бурового штуцера путем обеспечения его связи с датчиками устья скважины одновременно с использованием указанного штуцера в качестве испытательного штуцера для использования при проведении испытательных работ на скважине. Штуцер обеспечивает точный размер штуцера посредством различных способов измерения размера штуцера.
[0086] Несмотря на то, что вышеприведенное описание изложено в данном документе со ссылкой на конкретные средства, материалы и примеры реализации изобретения, настоящее изобретение не ограничено раскрытыми деталями; напротив, оно охватывает все функционально эквивалентные конструкции, способы и применения, входящие в объем сопутствующей формулы изобретения.
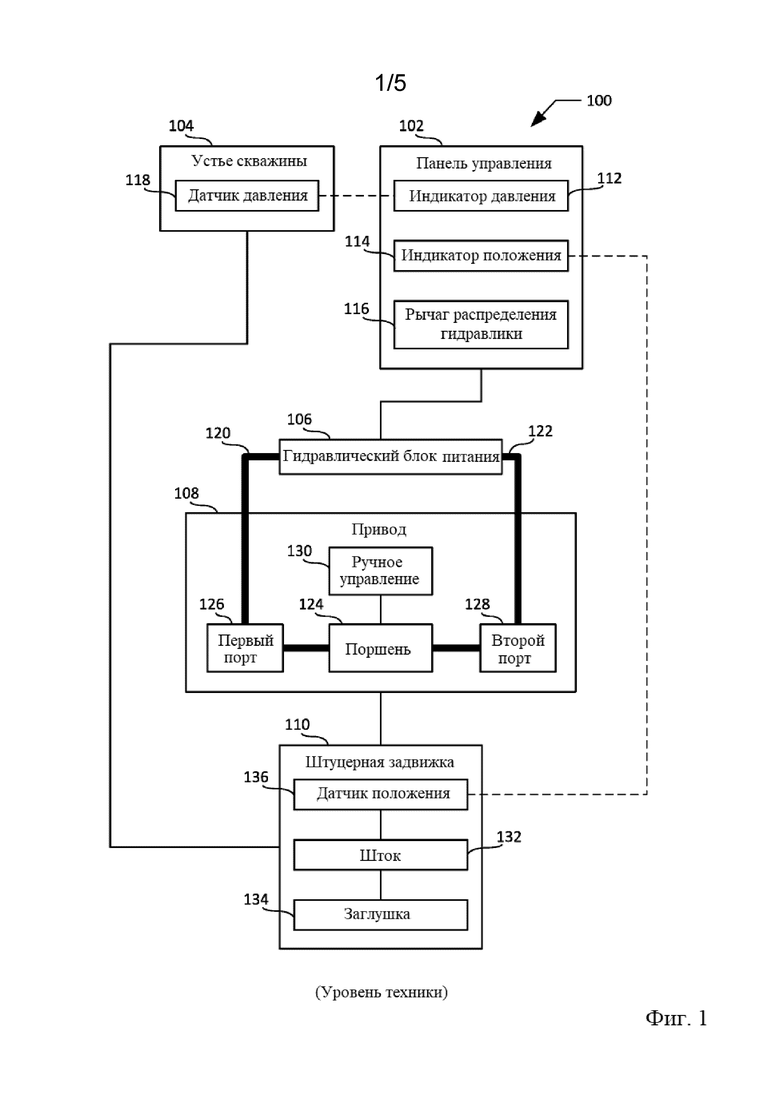
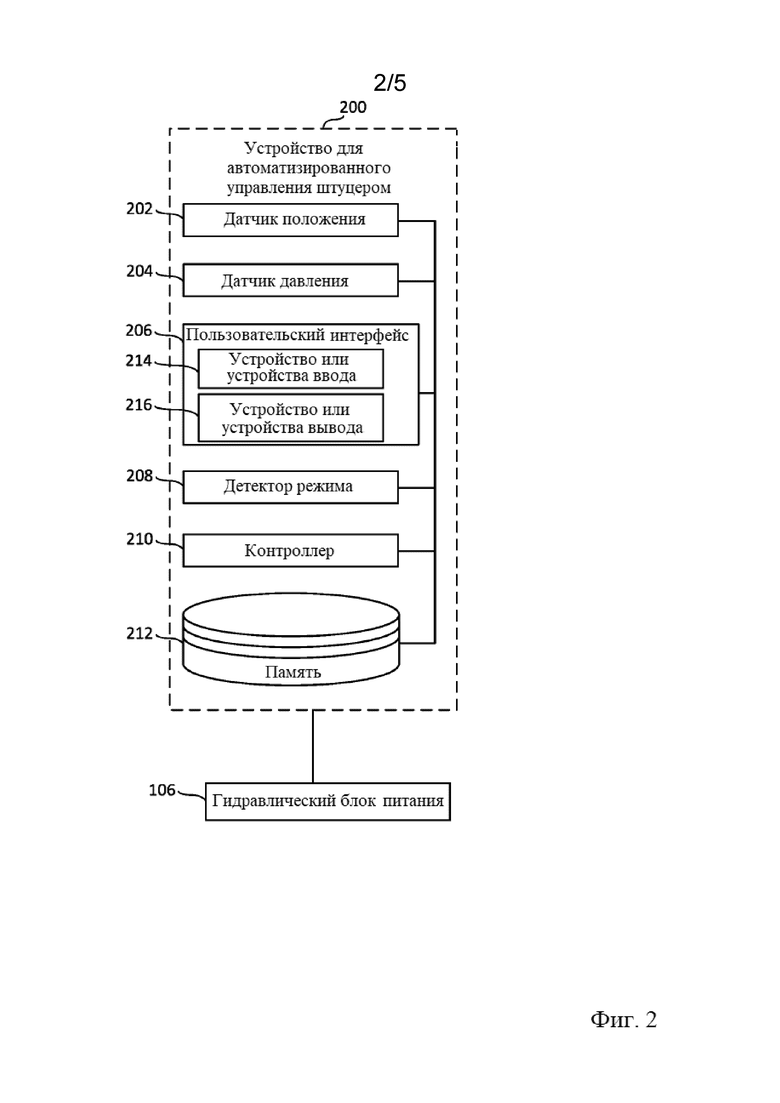
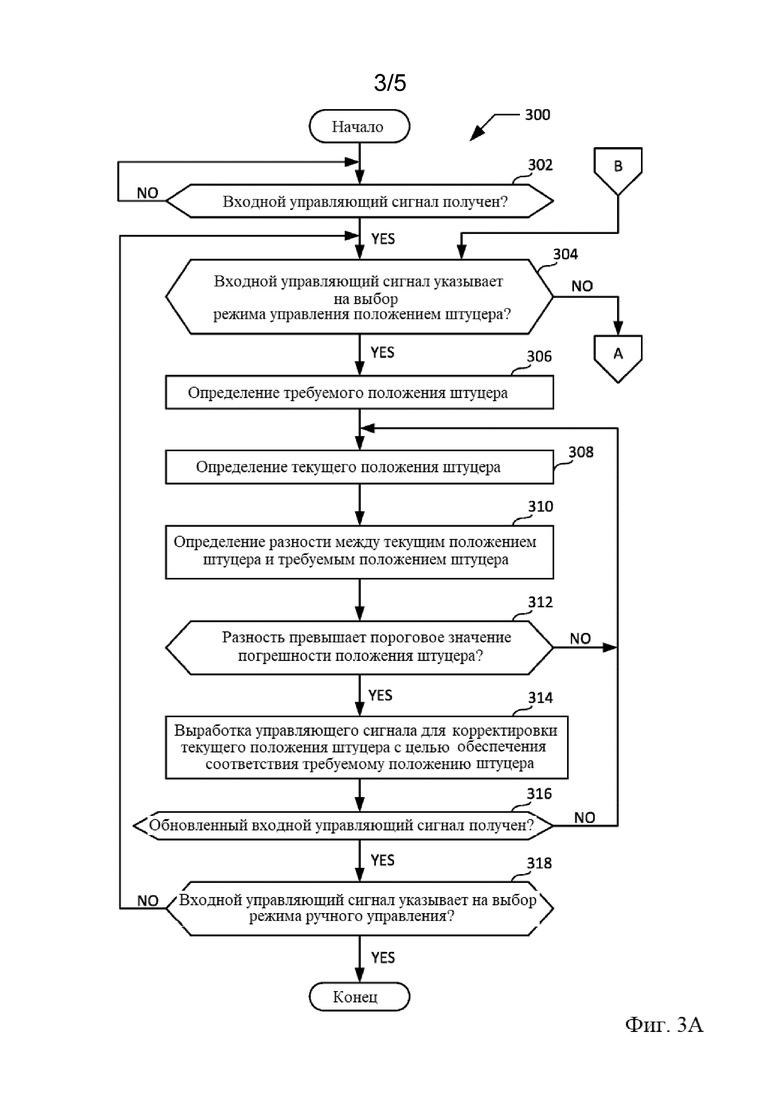
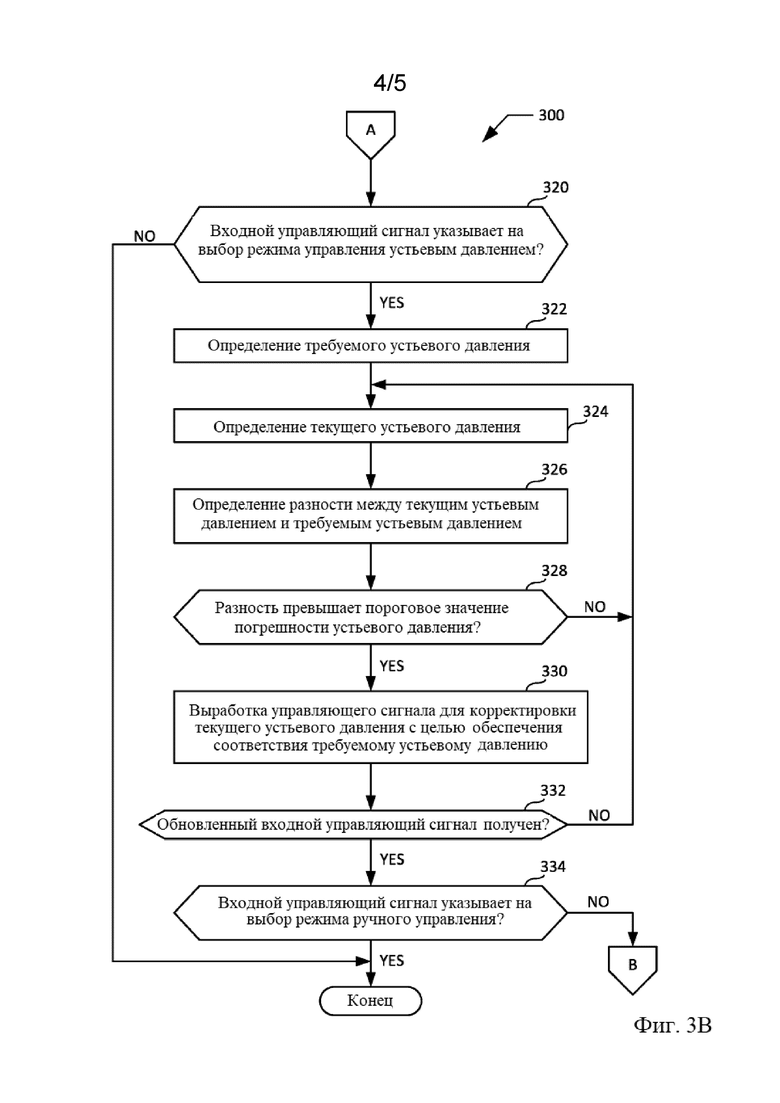

Группа изобретений относится устройству и способам автоматизированного управления штуцером. Устройство для автоматического управления штуцерной задвижкой содержит контроллер. Контроллер выполнен с возможностью управления положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы. Контроллер также выполнен с возможностью управления устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы. Устье скважины функционально связано со штуцерной задвижкой. Заявлены способ автоматического управления штуцерной задвижкой и машиночитаемый носитель. Достигается технический результат – уменьшение степени вмешательства человека, необходимого для поддержания устьевого давления устья скважины и положения штуцера задвижки в пределах требуемых значений. 3 н. и 17 з.п. ф-лы, 5 ил.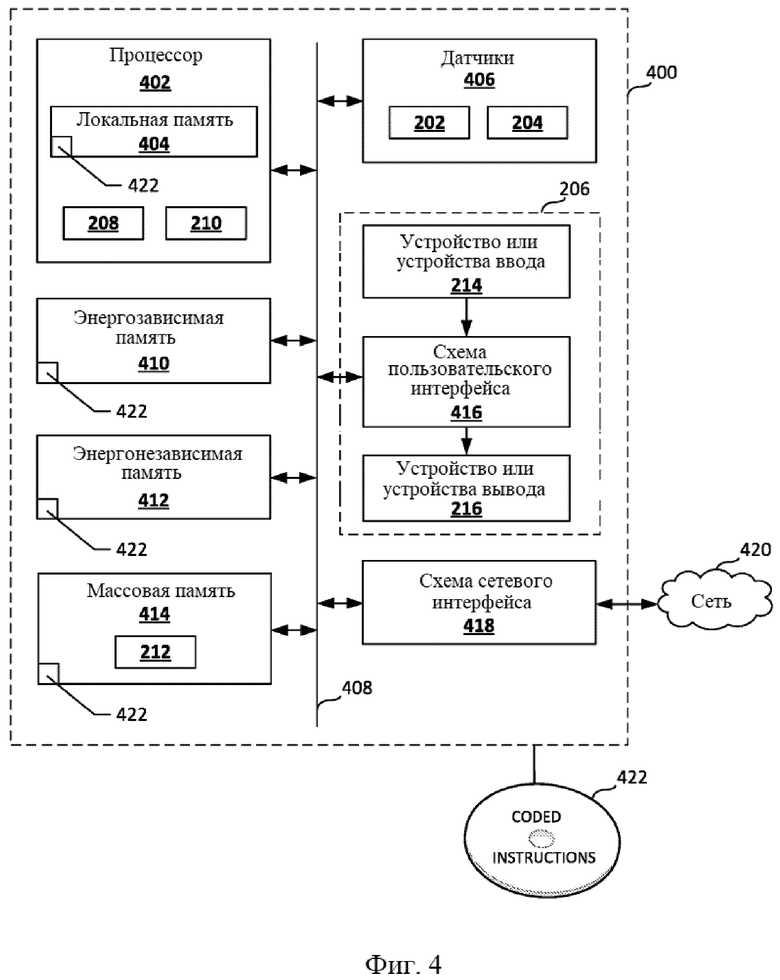
1. Устройство для автоматического управления штуцерной задвижкой, содержащее:
контроллер, выполненный с возможностью:
управления положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы; и
управления устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы, причем устье скважины функционально связано со штуцерной задвижкой.
2. Устройство по п. 1, в котором контроллер, в ходе управления положением штуцера штуцерной задвижки посредством первого контура управления, выполнен с возможностью:
определять требуемое положение штуцера штуцерной задвижки;
определять текущее положение штуцера штуцерной задвижки; и
вырабатывать управляющий сигнал в ответ на определение того факта, что разность между текущим положением штуцера и требуемым положением штуцера превышает пороговое значение погрешности положения штуцера, причем управляющий сигнал предназначен для корректировки текущего положения штуцера штуцерной задвижки посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому положению штуцера.
3. Устройство по п. 1, в котором контроллер, в ходе управления устьевым давлением устья скважины посредством второго контура управления, выполнен с возможностью:
определять требуемое устьевое давление устья скважины;
определять текущее устьевое давление устья скважины; и
вырабатывать управляющий сигнал в ответ на определение того факта, что разность между текущим устьевым давлением и требуемым устьевым давлением превышает пороговое значение погрешности устьевого давления, причем управляющий сигнал предназначен для корректировки текущего устьевого давления посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому устьевому давлению путем корректировки текущего положения штуцера штуцерной задвижки.
4. Устройство по п. 1, в котором контроллер также выполнен с возможностью:
управления положением штуцера штуцерной задвижки посредством первого контура управления до обнаружения выбора второго из множества режимов работы или выбора третьего из множества режимов работы; и
управления устьевым давлением устья скважины посредством второго контура управления до обнаружения выбора первого из множества режимов работы или выбора третьего из множества режимов работы.
5. Устройство по п. 4, в котором третий из множества режимов работы представляет собой режим ручного управления.
6. Устройство по п. 4, также содержащее:
пользовательский интерфейс для получения входных управляющих сигналов, связанных с автоматическим управлением штуцерной задвижкой; и
детектор режима для обнаружения выбора соответствующего одного из первого, второго и третьего из множества режимов работы на основании данных идентификации режима, включенных в соответствующие входные управляющие сигналы, полученные посредством пользовательского интерфейса.
7. Устройство по п. 6, в котором данные идентификации режима содержат по меньшей мере одно из разряда выбора режима, заданного значения положения штуцера, заданного значения устьевого давления или кода ручного управления.
8. Способ автоматического управления штуцерной задвижкой, включающий:
управление положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы; и
управление устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы, причем устье скважины функционально связано со штуцерной задвижкой.
9. Способ по п. 8, в котором управление положением штуцера штуцерной задвижки посредством первого контура управления включает:
определение требуемого положения штуцера штуцерной задвижки;
определение текущего положения штуцера штуцерной задвижки; и
выработку управляющего сигнала в ответ на определение того факта, что разность между текущим положением штуцера и требуемым положением штуцера превышает пороговое значение погрешности положения штуцера, причем управляющий сигнал способен обеспечивать корректировку текущего положения штуцера штуцерной задвижки посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому положению штуцера.
10. Способ по п. 8, в котором управление устьевым давлением устья скважины посредством второго контура управления включает:
определение требуемого устьевого давления устья скважины;
определение текущего устьевого давления устья скважины; и
выработку управляющего сигнала в ответ на определение того факта, что разность между текущим устьевым давлением и требуемым устьевым давлением превышает пороговое значение погрешности устьевого давления, причем управляющий сигнал способен обеспечивать корректировку текущего устьевого давления посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому устьевому давлению путем корректировки текущего положения штуцера штуцерной задвижки.
11. Способ по п. 8, также включающий:
управление положением штуцера штуцерной задвижки посредством первого контура управления до обнаружения выбора второго из множества режимов работы или выбора третьего из множества режимов работы; и
управление устьевым давлением устья скважины посредством второго контура управления до обнаружения выбора первого из множества режимов работы или выбора третьего из множества режимов работы.
12. Способ по п. 11, в котором третий из множества режимов работы представляет собой режим ручного управления.
13. Способ по п. 11, также включающий:
получение посредством пользовательского интерфейса входных управляющих сигналов, связанных с автоматическим управлением штуцерной задвижкой; и
обнаружение выбора соответствующего одного из первого, второго и третьего из множества режимов работы на основании данных идентификации режима, включенных в соответствующие входные управляющие сигналы, полученные посредством пользовательского интерфейса.
14. Способ по п. 13, в котором данные идентификации режима содержат по меньшей мере одно из разряда выбора режима, заданного значения положения штуцера, заданного значения устьевого давления или кода ручного управления.
15. Материальный машиночитаемый носитель данных, содержащий команды, исполнение которых приводит к выполнению контроллером по меньшей мере:
управления положением штуцера штуцерной задвижки посредством первого контура управления в ответ на выбор первого из множества обнаруживаемых режимов работы; и
управления устьевым давлением устья скважины посредством второго контура управления в ответ на выбор второго из множества обнаруживаемых режимов работы, причем устье скважины функционально связано со штуцерной задвижкой.
16. Материальный машиночитаемый носитель данных по п. 15, в котором исполнение команд также приводит к выполнению контроллером, управляющим положением штуцера штуцерной задвижки посредством первого контура управления:
определения требуемого положения штуцера штуцерной задвижки;
определения текущего положения штуцера штуцерной задвижки; и
выработки управляющего сигнала в ответ на определение того факта, что разность между текущим положением штуцера и требуемым положением штуцера превышает пороговое значение погрешности положения штуцера, причем управляющий сигнал способен обеспечивать корректировку текущего положения штуцера штуцерной задвижки посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому положению штуцера.
17. Материальный машиночитаемый носитель данных по п. 15, в котором исполнение команд также приводит к выполнению контроллером, управляющим устьевым давлением устья скважины посредством второго контура управления:
определения требуемого устьевого давления устья скважины;
определения текущего устьевого давления устья скважины; и
выработки управляющего сигнала в ответ на определение того факта, что разность между текущим устьевым давлением и требуемым устьевым давлением превышает пороговое значение погрешности устьевого давления, причем управляющий сигнал способен обеспечивать корректировку текущего устьевого давления посредством гидравлического блока питания и привода, функционально связанного со штуцерной задвижкой, с целью обеспечения соответствия требуемому устьевому давлению путем корректировки текущего положения штуцера штуцерной задвижки.
18. Материальный машиночитаемый носитель данных по п. 15, в котором исполнение команд также приводит к выполнению контроллером:
управления положением штуцера штуцерной задвижки посредством первого контура управления до обнаружения выбора второго из множества режимов работы или выбора третьего из множества режимов работы; и
управления устьевым давлением устья скважины посредством второго контура управления до обнаружения выбора первого из множества режимов работы или выбора третьего из множества режимов работы, причем третий из множества режимов работы представляет собой режим ручного управления.
19. Материальный машиночитаемый носитель данных по п. 18, в котором исполнение команд также приводит к выполнению контроллером:
обнаружения выбора соответствующего одного из первого, второго и третьего из множества режимов работы на основании данных идентификации режима, включенных в соответствующие входные управляющие сигналы, полученные посредством пользовательского интерфейса, причем соответствующие входные управляющие сигналы связаны с автоматическим управлением штуцерной задвижкой.
20. Материальный машиночитаемый носитель данных по п. 19, в котором данные идентификации режима содержат по меньшей мере одно из разряда выбора режима, заданного значения положения штуцера, заданного значения устьевого давления или кода ручного управления.
| US 20040144565 A1, 29.07.2004 | |||
| WO 2014055598 A2, 10.04.2014 | |||
| WO 2014007797 A1, 09.01.2014 | |||
| АРМАТУРА ДЛЯ ДОБЫЧИ И ТРАНСПОРТА ИСКОПАЕМОГО ТОПЛИВА С ПРЕДОХРАНИТЕЛЬНЫМ БЛОКОМ | 2011 |
|
RU2571701C2 |
| КЛАПАН РЕГУЛИРУЕМЫЙ | 2014 |
|
RU2581075C2 |
| СПОСОБ УПРАВЛЕНИЯ ФОНТАННОЙ АРМАТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2596175C1 |
| US 20040216884 A1, 04.11.2004 | |||
| WO 2016093859 A1, 16.06.2016. | |||

