ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники
Настоящее изобретение относится к области технологий оборудования для добычи угля и, в частности, к устройству и способу определения угла коромысла врубовой машины на основе оптоволоконных измерений.
Описание связанного уровня техники
Врубовая машина, будучи одним из ключевых устройств для полностью механизированного добычного забоя, является важным техническим устройством для осуществления эффективной и интенсивной добычи угля, а также улучшения рабочих условий в рабочем забое. Автоматизированное управление врубовой машиной стало ключевым фактором для реализации автоматизированного управления всем рабочим забоем. Однако до сих пор отсутствует какое-либо идеальное решение для преодоления технологии «горлышка», а именно, автоматической регулировки высоты барабана и связанных с ним ключевых технологий, для осуществления автоматического управления врубовой машиной.
В настоящее время для врубовой машины существует два общепринятых способа автоматической регулировки высоты: В первом способе регулировка высоты осуществляется путем использования гидравлической системы управления, согласно данным, полученным после измерения угла поворота коромысла; а во втором способе высота барабана непосредственно измеряется путем использования датчика смещения, тем самым осуществляя точное управление регулировкой высоты.
В раскрытом патенте на изобретение Китая (заявка №: 201910200848.1) представлен датчик и способ определения угла коромысла врубовой машины, причем датчика содержит основание, верхнюю крышку основания, качающийся рычаг и другие элементы. Основание датчика установлено на шарнирной оси, с которой соединено коромысло на корпусе машины, а качающийся рычаг соединен на коромысле. При вращении коромысла вокруг шарнирной оси, качающийся рычаг синхронно поворачивается вокруг вращающегося вала на опорном основании. На вращающемся вале установлен круглый элемент из магнитной стали, который вырабатывает вращающееся магнитное поле по мере вращения вращающегося вала, а затем угол поворота коромысла может быть получен путем использования датчика определения угла на основе гигантского магнитосопротивления, который установлен на верхней крышке основания, и конструкции цепи. Однако такой способ обладает следующими недостатками: во-первых, в ходе установки датчика вращающийся вал датчика требует точного выравнивания с центром шарнирной оси на коромысле. Если имеет место ошибка выравнивания, то радиально-упорный шариковый подшипник на вращающемся вале может вырабатывать сильный нажим, когда качающийся рычаг поворачивается с коромыслом, с легкостью повреждая датчик. Во-вторых, ввиду того, что в датчике используется конструкция цепи, необходимо учитывать защиту и подавления эффекта взрыва, когда машина работает под землей. В-третьих, секторообразная канавка с углом 120° для прохождения качающегося рычага через нее выполнена на боковой стенке верхней крышки основания датчика, и качающийся рычаг может двигаться в канавке при приведении в действие коромыслом врубовой машины. Таким образом, при неблагоприятных условиях работы в шахте, в датчик с легкостью попадает пыль, которая влияет на степень смазывания подшипника и других механизмов, сокращая срок службы датчика.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническая задача
Цель изобретения: ввиду указанных выше проблем, существующих в уровне техники, в настоящем изобретении представлено устройство и способ определения угла коромысла врубовой машины на основе оптоволоконных измерений, причем устройство способно надежно противодействовать электромагнитным помехам, обладает свойством собственной защиты от эффекта взрыва и высокой точностью, тем самым осуществляя измерение угла коромысла врубовой машины.
Техническое решение
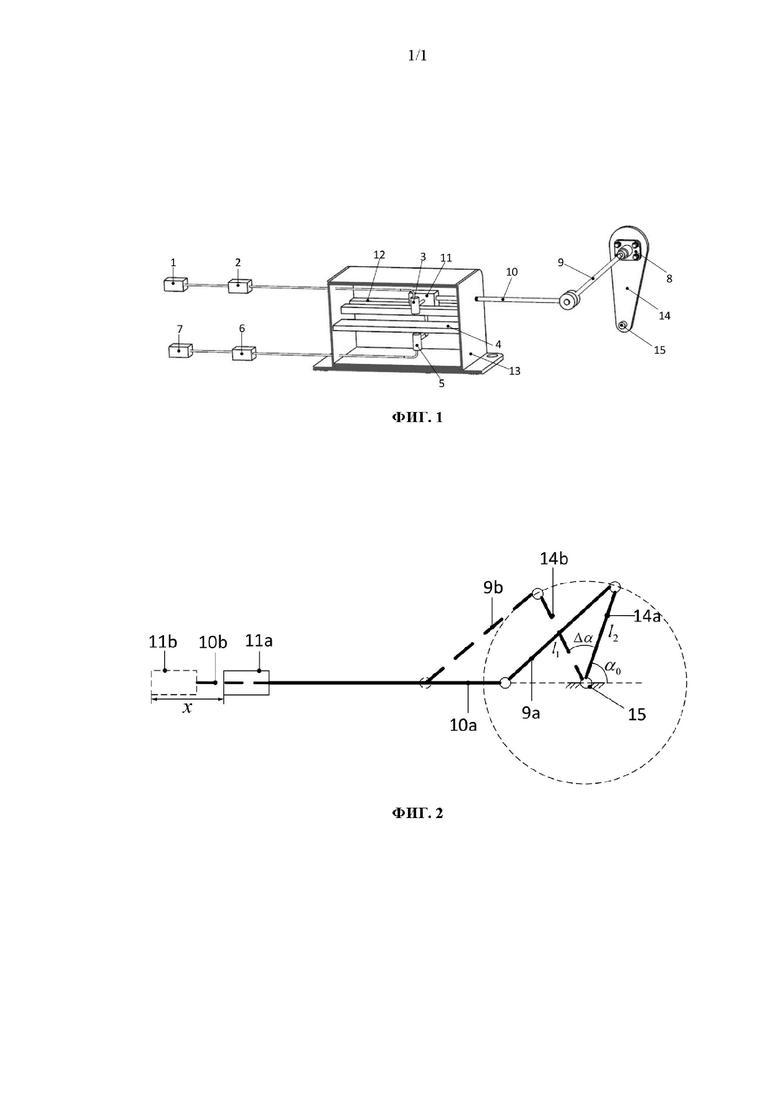
Для достижения целей настоящего изобретения, в настоящем изобретении используются следующие технические решения: Представлено устройство для определения угла коромысла врубовой машины на основе оптоволоконных измерений, которое содержит оптическую систему и механическую систему, причем оптическая система содержит широкополосный источник (1) света, поляризатор (2), первую коллиматорную линзу (3), вращающуюся в градиентной среде пластину (4), вторую коллиматорную линзу (5), поляризационный делитель (6) луча и модуль (7) обработки данных; а механическая система содержит соединительное основание (8), первый соединительный стержень (9), второй соединительный стержень (10), ползун (11), кронштейн (12) и корпус (13) датчика.
Широкополосный источник (1) света соединен с поляризатором (2) через одномодовое оптическое волокно, а поляризатор (2) соединен с коллиматорной линзой (3) через вращающееся фотонно-кристаллическое волокно с высоким двупреломлением (Hi-Bi PCF). Первая коллиматорная линза (3) и вторая коллиматорная линза (5) имеют центральные оси на одной и той же линии, и обе они прикреплены к ползуну (11) посредством жесткого соединительного стержня. Ползун (11) входит в кронштейн (12) посредством линейного желоба скольжения на кронштейне (12), а кронштейн (12) закреплен внутри корпуса (13) датчика.
Вращающаяся в градиентной среде пластина (4) закреплена в корпусе (13) датчика и расположена между первой и второй коллиматорными линзами (3) и (5). Вторая коллиматорная линза (5) соединена с поляризационным делителем (6) луча через вращающееся Hi-Bi PCF; а поляризационный делитель (6) луча соединен с модулем (7) обработки данных через одномодовое оптическое волокно.
Один конец первого соединительного стержня (9) соединен с соединительным основанием (8) посредством шарнира, при этом первый соединительный стержень (9) и соединительное основание могут вращаться друг относительно друга посредством шарнира. Другой конец первого соединительного стержня (9) соединен со вторым соединительным стержнем (10) посредством шарнира, при этом первый соединительный стержень (9) и второй соединительный стержень (10) могут вращаться друг относительно друга посредством шарнира. Другой конец второго соединительного стержня (10) неподвижно соединен с ползуном (11), при этом второй соединительный стержень (10) параллелен длине кронштейна (12).
Кроме того, широкополосный источник (1) света требует обработку для обеспечения защиты от эффекта взрыва.
Кроме того, вращающаяся в градиентной среде пластина (4) выполнена удлиненной, имеет показатель преломления, постепенно меняющийся по длине, а также обладает оптической активностью. Специфическое вращение вращающейся в градиентной среде пластины (4) по длине и положение по длине удовлетворяют линейному отношению: α=kx, где α - специфическое вращение некоторого положения по длине на вращающейся в градиентной среде пластине (4), x - расстояние от некоторого положения на вращающейся в градиентной среде пластине (4) до правого конца, а k - константа.
Кроме того, хвостовое волокно поляризационного делителя (6) луча представляет собой оптическое волокно, сохраняющее поляризацию.
Кроме того, модуль (7) обработки данных состоит из фотоэлектрического детектора, чипа обработки данных и устройства отображения; а также он используется для получения фазового угла поляризационного света путем вычисления оптической мощности и отображения фазового угла с помощью устройства отображения.
Кроме того, длина второго соединительного стержня (10) больше длины вращающейся в градиентной среде пластины (4).
Кроме того, ползун (11) входит в желоб скольжения кронштейна (12) благодаря смазыванию консистентной смазкой.
В настоящем изобретении также представлен способ определения угла коромысла врубовой машины на основе оптоволоконных измерений, который включает следующие этапы, на которых:
A: неподвижно соединяют соединительное основание (8) устройства с коромыслом (14) врубовой машины с использованием болтов; неподвижно соединяют корпус (13) датчика с корпусом врубовой машины с использованием болтов, причем обеспечивают, чтобы расстояние между центрами шарнирной оси (15) и второго соединительного стержня (10) равнялось 0; и размещают ползун (11) в крайнем правом исходном положении на желобе скольжения кронштейна (12);
B: включают широкополосный источник (1) света; обеспечивают попадание света, выходящего из широкополосного источника (1) света, в поляризатор (2) через одномодовое оптическое волокно с образованием линейно поляризованного света в поляризаторе (2) и обеспечивают попадание линейно поляризованного света, выходящего из поляризатора (2), в первую коллиматорную линзу (3) через вращающееся Hi-Bi PCF; обеспечивают прохождение линейного поляризованного света, выходящего из первой коллиматорной линзы (3), через вращающуюся в градиентной среде пластину (4) и последующее достижение второй коллиматорной линзы (5), где благодаря эффекту оптического вращения, плоскость поляризации линейного поляризованного света дает угол вращения во время прохождения через вращающуюся в градиентной среде пластину; обеспечивают попадание линейно поляризованного света, выходящего из второй коллиматорной линзы (5), в поляризационный делитель (6) луча через вращающееся Hi-Bi PCF; делят, посредством поляризационного делителя (6) луча, линейно поляризованный свет на две оптические составляющие в перпендикулярных направлениях и вводят оптические составляющие в модуль (7) обработки данных через одномодовое оптическое волокно; и анализируют, посредством модуля (7) обработки данных, оптический сигнал с получением фазового угла линейно поляризованного света, где фазовый угол - ϕ=αd=kxd, при этом x - расстояние от некоторого положения на вращающейся в градиентной среде пластине (4) до правого конца, d - толщина вращающейся в градиентной среде пластины, а k - константа;
C: соединяют коромысло врубовой машины с тяговым корпусом врубовой машины путем использования шарнирной оси; при работе врубовой машины, коромысло (14) врубовой машины поворачивается с шарнирной осью (15) в качестве оси вращения для осуществления добычи угля, а ползун (11) перемещается влево по прямой линии относительно вращающейся в градиентной среде пластины (4) во время подъема и поворота коромысла (14), причем при вращении коромысла (14) врубовой машины вокруг шарнирной оси (15) из положения 14a в положение 14b, угол вращения коромысла (14) в этом случае составляет Δα, и в то же время первый соединительный стержень (9) переходит из положения 9a в положение 9b, а второй соединительный стержень (10) перемещается из положения 10a в положение 10b; и за счет того, что второй соединительный стержень (10) неподвижно соединен с ползуном (11), ползун (11) перемещается из положения 11a в положение 11b, и в этом случае ползун (11) имеет смещение x; и
смещение x ползуна (11) и угол Δα поворота коромысла (14) удовлетворяют следующему отношению:

где x - расстояние от положения ползуна (11) до крайнего правого исходного положения на желобе скольжения кронштейна (12), l1 - длина первого соединительного стержня (9), l2 - расстояние от центра положения соединительного основания (8) на коромысле (14) до шарнирной оси (15), α0 - угол раскрытия между вектором направления линии, по которой проходит центральная ось исходного положения коромысла (14), и вектором направления линии, по которой проходит длина второго соединительного стержня (10), а Δα - угол поворота коромысла (14), который является положительным при повороте по часовой стрелке и отрицательным при повороте против часовой стрелки; и
D: обеспечивают перемещение первой коллиматорной линзы (3) и второй коллиматорной линзы (5) вместе с ползуном (11) по прямой линии вдоль длины второго соединительного стержня (10), причем положение на вращающейся в градиентной среде пластине (4), через которое проходит линейно поляризованный свет, выходящий из первой коллиматорной линзы (3), меняется соответствующим образом, а также меняется угол вращения плоскости поляризации линейно поляризованного света после прохождения через вращающуюся в градиентной среде пластину; следовательно, функциональное отношение между фазовыми углами ϕ, полученными посредством модуля (7) обработки данных и соответствующими различным положениям ползуна (12), и углами Δα поворота коромысла (15) является следующим:
 ;
;
и,
следовательно, фазовые углы ϕ и углы Δα поворота находятся во взаимно-однозначном соответствии, то есть угол поворота коромысла может быть определен в соответствии с полученным фазовым углом линейно поляризованного света.
Полезный эффект
По сравнению с уровнем техники, технические решения, в соответствии с настоящим изобретением, обладают следующими преимущественными техническими эффектами:
В устройстве и способе определения угла коромысла врубовой машины на основе оптоволоконных измерений, согласно настоящему изобретению, поворот коромысла преобразуется в перемещение ползуна путем использования кривошипно-ползунного механизма, и смещение измеряют в соответствии с тем, что линейно поляризованный свет проходит через различные положения на среде с градиентным волокном. Исходя из этого изобретательского замысла, смещение перемещения измеряют посредством оптоволоконных измерений для определения угла вращения коромысла. Устройство, согласно настоящему изобретению, обладает такими преимуществами, как способность надежно противодействовать электромагнитным помехам, простая конструкция, высокая точность измерений, а также собственная защита от эффекта взрыва.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ. 1 представляет собой схематическое изображение замысла и всего настоящего изобретения; и
ФИГ. 2 представляет собой схему движения механической части.
Расшифровка ссылочных обозначений: 1. Широкополосный источник света, 2. Поляризатор, 3. Первая коллиматорная линза, 4. Вращающаяся в градиентной среде пластина, 5. Вторая коллиматорная линза, 6. Поляризационный делитель луча, 7. Модуль обработки данных, 8. Соединительное основание, 9. Первый соединительный стержень, 10. Второй соединительный стержень, 11. Ползун, 12. Кронштейн, 13. Корпус датчика, 14. Коромысло, 15. Шарнирная ось.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Технические решения, согласно настоящему изобретению, описаны более подробно далее ниже со ссылкой на сопроводительные чертежи и конкретные варианты реализации.
В варианте реализации настоящего изобретения представлено устройство для определения угла коромысла врубовой машины на основе оптоволоконных измерений, которое, как показано на ФИГ. 1 и 2, содержит оптическую систему и механическую систему. Оптическая система содержит широкополосный источник 1 света, поляризатор 2, первую коллиматорную линзу 3, вращающуюся в градиентной среде пластину 4, вторую коллиматорную линзу 5, поляризационный делитель 6 луча и модуль 7 обработки данных. Механическая система содержит соединительное основание 8, первый соединительный стержень 9, второй соединительный стержень 10, ползун 11, кронштейн 12 и корпус 13 датчика.
Широкополосный источник 1 света соединен с поляризатором 2 через одномодовое оптическое волокно, а поляризатор 2 соединен с первой коллиматорной линзой 3 через вращающееся Hi-Bi PCF. Первая коллиматорная линза 3 и вторая коллиматорная линза 5 имеют центральные оси на одной и той же линии, и обе они прикреплены к ползуну 11 посредством жесткого соединительного стержня. Ползун 11 входит в кронштейн 12 посредством линейного желоба скольжения на кронштейне 12, а кронштейн 12 закреплен внутри корпуса 13 датчика.
Вращающаяся в градиентной среде пластина 4 закреплена в корпусе 13 датчика и расположена между первой и второй коллиматорными линзами 3 и 5. Вторая коллиматорная линза 5 соединена с поляризационным делителем 6 луча через вращающееся Hi-Bi PCF. Поляризационный делитель 6 луча соединен с модулем 7 обработки данных через одномодовое оптическое волокно.
Один конец первого соединительного стержня 9 соединен с соединительным основанием 8 посредством шарнира, при этом первый соединительный стержень 9 и соединительное основание могут вращаться друг относительно друга посредством шарнира. Другой конец первого соединительного стержня 9 соединен со вторым соединительным стержнем 10 посредством шарнира, при этом первый соединительный стержень 9 и второй соединительный стержень 10 могут вращаться друг относительно друга посредством шарнира. Другой конец второго соединительного стержня 10 неподвижно соединен с ползуном 11, при этом второй соединительный стержень 10 параллелен длине кронштейна 12.
Широкополосный источник 1 света требует обработку для обеспечения защиты от эффекта взрыва.
Вращающаяся в градиентной среде пластина 4 выполнена удлиненной, имеет показатель преломления, постепенно меняющийся по длине, а также обладает оптической активностью. Специфическое вращение вращающейся в градиентной среде пластины 4 по длине и положение по длине удовлетворяют линейному отношению: α=kx, где α - специфическое вращение некоторого положения по длине вращающейся в градиентной среде пластины 4, x - расстояние от некоторого положения на вращающейся в градиентной среде пластине 4 до правого конца, а k - константа.
Хвостовое волокно поляризационного делителя 6 луча представляет собой оптическое волокно, сохраняющее поляризацию.
Модуль 7 обработки данных состоит из фотоэлектрического детектора, чипа обработки данных и устройства отображения; а также он используется для получения фазового угла поляризационного света путем вычисления оптической мощности и отображения фазового угла с помощью устройства отображения.
Длина второго соединительного стержня 10 больше длины вращающейся в градиентной среде пластины 4.
Ползун 11 входит в желоб скольжения кронштейна 12 благодаря смазыванию консистентной смазкой.
В настоящем изобретении также представлен способ определения угла коромысла врубовой машины на основе оптоволоконных измерений, который включает следующие этапы, на которых:
А: Неподвижно соединяют соединительное основание 8 устройства с коромыслом 14 врубовой машины с использованием болтов и неподвижно соединяют корпус 13 датчика с корпусом врубовой машины с использованием болтов, причем обеспечивают, чтобы расстояние между центрами шарнирной оси (15) и второго соединительного стержня (10) равнялось 0. Ползун 11 размещают в крайнем правом исходном положении на желобе скольжения кронштейна 12.
В: Включают широкополосный источник 1 света. Обеспечивают попадание света, выходящего из широкополосного источника 1 света, в поляризатор 2 через одномодовое оптическое волокно с образованием линейно поляризованного света в поляризаторе 2 и обеспечивают попадание линейно поляризованного света, выходящего из поляризатора 2, в первую коллиматорную линзу 3 через вращающееся Hi-Bi PCF. Обеспечивают прохождение линейного поляризованного света, выходящего из первой коллиматорной линзы 3, через вращающуюся в градиентной среде пластину 4 и последующее достижение второй коллиматорной линзы 5, где благодаря эффекту оптического вращения, плоскость поляризации линейного поляризованного света дает угол вращения во время прохождения через вращающуюся в градиентной среде пластину. Обеспечивают попадание линейно поляризованного света, выходящего из второй коллиматорной линзы 5, в поляризационный делитель 6 луча через вращающееся Hi-Bi PCF. Делят, посредством поляризационного делителя 6 луча, линейно поляризованный свет на две оптические составляющие в перпендикулярных направлениях и вводят оптические составляющие в модуль 7 обработки данных через одномодовое оптическое волокно. Анализируют, посредством модуля 7 обработки данных, оптический сигнал с получением фазового угла линейно поляризованного света, где фазовый угол - ϕ=αd=kxd, при этом x - расстояние от некоторого положения на вращающейся в градиентной среде пластине 4 до правого конца, d - толщина вращающейся в градиентной среде пластины, а k - константа;
С: Соединяют коромысло врубовой машины с тяговым корпусом врубовой машины путем использования шарнирной оси. При работе врубовой машины, коромысло 14 врубовой машины поворачивается с шарнирной осью 15 в качестве оси вращения для осуществления добычи угля, а ползун 11 перемещается влево по прямой линии относительно вращающейся в градиентной среде пластины 4 во время подъема и поворота коромысла 14. При вращении коромысла (14) врубовой машины вокруг шарнирной оси (15) из положения 14a в положение 14b, угол вращения коромысла (14) в этом случае составляет Δα, и в то же время первый соединительный стержень (9) переходит из положения 9a в положение 9b, а второй соединительный стержень (10) перемещается из положения 10a в положение 10b. За счет того, что второй соединительный стержень (10) неподвижно соединен с ползуном (11), ползун (11) перемещается из положения 11a в положение 11b. В этом случае ползун (11) имеет смещение x, и смещение x ползуна (11) и угол Δα поворота коромысла 14 удовлетворяют следующему отношению:

где x - расстояние от положения ползуна 11 до крайнего правого исходного положения на желобе скольжения кронштейна 12, l1 - длина первого соединительного стержня 9, l2 - расстояние от центра положения соединительного основания 8 на коромысле 14 до шарнирной оси 15, α0 - угол раскрытия между вектором направления линии, по которой проходит центральная ось исходного положения коромысла 14, и вектором направления линии, по которой проходит длина второго соединительного стержня (10), а Δα - угол поворота коромысла 14, который является положительным при повороте по часовой стрелке и отрицательным при повороте против часовой стрелки.
D: Обеспечивают перемещение первой коллиматорной линзы 3 и второй коллиматорной линзы 5 вместе с ползуном 11 по прямой линии вдоль длины второго соединительного стержня 10, причем положение на вращающейся в градиентной среде пластине 4, через которое проходит линейно поляризованный свет, выходящий из первой коллиматорной линзы 3, меняется соответствующим образом, а также меняется угол вращения плоскости поляризации линейно поляризованного света после прохождения через вращающуюся в градиентной среде пластину. Следовательно, функциональное отношение между фазовыми углами ϕ, полученными посредством модуля 7 обработки данных и соответствующими различным положениям ползуна 12, и углами Δα поворота коромысла 15 является следующим:
 .
.
Следовательно, фазовые углы ϕ и углы Δα поворота находятся во взаимно-однозначном соответствии, то есть угол поворота коромысла может быть определен в соответствии с полученным фазовым углом линейно поляризованного света.
Выше описаны лишь предпочтительные варианты реализации настоящего изобретения, и они не предназначены для ограничения настоящего изобретения каким-либо образом. На основании вариантов реализации настоящего изобретения, все другие варианты реализации, полученные специалистом в данной области техники без изобретательской деятельности, входят в объем защиты настоящего изобретения. Любые простые модификации и эквивалентные изменения, выполненные в отношении представленных выше вариантов реализации, в соответствии с технической сущностью настоящего изобретения, входят в объем защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЯЧЕЙКА ФАРАДЕЯ ДЛЯ ИЗМЕРИТЕЛЕЙ ТОКА В ВЫСОКОВОЛЬТНЫХ СЕТЯХ | 2019 |
|
RU2723238C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО МАГНИТНОГО ПОЛЯ И ЭЛЕКТРИЧЕСКОГО ТОКА | 2010 |
|
RU2428704C1 |
| ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПЕРЕМЕННОГО ТОКА В ВЫСОКОВОЛЬТНЫХ СЕТЯХ | 2016 |
|
RU2627987C1 |
| ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПЕРЕМЕННОГО И ПОСТОЯННОГО ТОКА В ВЫСОКОВОЛЬТНЫХ СЕТЯХ | 2017 |
|
RU2663545C1 |
| ЯЧЕЙКА ФАРАДЕЯ ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕННОГО ТОКА В ВЫСОКОВОЛЬТНЫХ СЕТЯХ | 2020 |
|
RU2762886C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ТОКА | 2010 |
|
RU2451941C1 |
| ИЗМЕРИТЕЛЬ ТОКА ОПТИЧЕСКИЙ ДВУХКАНАЛЬНЫЙ | 2020 |
|
RU2752341C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОЛЯРИЗАЦИОННЫХ АМПЛИТУДНО-ЧАСТОТНЫХ ШУМОВ В АНИЗОТРОПНЫХ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКАХ | 2022 |
|
RU2783392C1 |
| БЛОК ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ ОПТИЧЕСКИ ПРОЗРАЧНОГО НОСИТЕЛЯ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ДАННЫХ | 2022 |
|
RU2813742C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВА ВВОДА-ВЫВОДА ИЗЛУЧЕНИЯ В КОЛЬЦЕВОМ ИНТЕРФЕРОМЕТРЕ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА НА ОСНОВЕ СПЕЦИАЛЬНОГО ДВУЖИЛЬНОГО СВЕТОВОДА | 2000 |
|
RU2188443C2 |
Изобретение относится к области технологий оборудования для добычи угля и, в частности, к устройству и способу определения угла коромысла врубовой машины на основе оптоволоконных измерений. Заявленное устройство для определения угла коромысла врубовой машины на основе оптоволоконных измерений содержит оптическую систему и механическую систему. Оптическая система содержит широкополосный источник света, поляризатор, первую коллиматорную линзу, вращающуюся в градиентной среде пластину, вторую коллиматорную линзу, поляризационный делитель луча и модуль обработки данных. Механическая система содержит соединительное основание, первый соединительный стержень, второй соединительный стержень, ползунок, кронштейн и корпус датчика. Причем широкополосный источник света соединен с поляризатором через одномодовое оптическое волокно, а поляризатор соединен с коллиматорной линзой через вращающееся фотонно-кристаллическое волокно с высоким двупреломлением (Hi-Bi PCF). Первая коллиматорная линза и вторая коллиматорная линза имеют центральные оси на одной и той же линии, и обе они прикреплены к ползуну, а ползун размещен на кронштейне и выполнен с возможностью скольжения на кронштейне, закрепленного внутри корпуса датчика. Вращающаяся в градиентной среде пластина закреплена в корпусе датчика и расположена между первой и второй коллиматорными линзами; причем вторая коллиматорная линза соединена с поляризационным делителем луча через вращающееся Hi-Bi PCF; а поляризационный делитель луча соединен с модулем обработки данных через одномодовое оптическое волокно. Один конец первого соединительного стержня соединен с соединительным основанием посредством шарнира, при этом первый соединительный стержень и соединительное основание выполнены с возможностью вращения относительно друг друга посредством шарнира. Другой конец первого соединительного стержня соединен со вторым соединительным стержнем посредством шарнира, при этом первый соединительный стержень и второй соединительный стержень выполнены с возможностью вращения относительно друг друга посредством шарнира; а другой конец второго соединительного стержня неподвижно соединен с ползуном, при этом второй соединительный стержень параллелен длине кронштейна. При работе врубовой машины коромысло преобразует информацию об угле вращения в линейное смещение, относящееся к градиентному показателю преломления, путем использования механизма соединительных стержней, а также меняется положение на вращающейся в градиентной среде пластине, через которое проходит линейно поляризованный свет, вырабатываемый оптической системой. Технический результат – повышение надежности противодействовать электромагнитным помехам, повышение точности и защиты от эффекта взрыва. 2 н. и 7 з.п. ф-лы, 2 ил.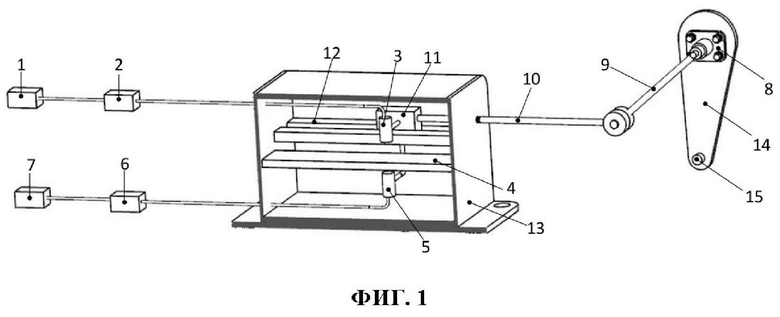
1. Устройство для определения угла коромысла врубовой машины на основе оптоволоконных измерений, содержащее оптическую систему и механическую систему, причем оптическая система содержит широкополосный источник (1) света, поляризатор (2), первую коллиматорную линзу (3), вращающуюся в градиентной среде пластину (4), вторую коллиматорную линзу (5), поляризационный делитель (6) луча и модуль (7) обработки данных; а механическая система содержит соединительное основание (8), первый соединительный стержень (9), второй соединительный стержень (10), ползунок (11), кронштейн (12) и корпус (13) датчика;
широкополосный источник (1) света соединен с поляризатором (2) через одномодовое оптическое волокно, а поляризатор (2) соединен с коллиматорной линзой (3) через вращающееся фотонно-кристаллическое волокно с высоким двупреломлением (Hi-Bi PCF); первая коллиматорная линза (3) и вторая коллиматорная линза (5) имеют центральные оси на одной и той же линии, и обе они прикреплены к ползуну (11); и ползун (11) размещен на кронштейне (12) и выполнен с возможностью скольжения на кронштейне (12), а кронштейн (12) закреплен внутри корпуса (13) датчика;
вращающаяся в градиентной среде пластина (4) закреплена в корпусе (13) датчика и расположена между первой и второй коллиматорными линзами (3) и (5); вторая коллиматорная линза (5) соединена с поляризационным делителем (6) луча через вращающееся Hi-Bi PCF; а поляризационный делитель (6) луча соединен с модулем (7) обработки данных через одномодовое оптическое волокно; и
один конец первого соединительного стержня (9) соединен с соединительным основанием (8) посредством шарнира, при этом первый соединительный стержень (9) и соединительное основание выполнены с возможностью вращения относительно друг друга посредством шарнира; другой конец первого соединительного стержня (9) соединен со вторым соединительным стержнем (10) посредством шарнира, при этом первый соединительный стержень (9) и второй соединительный стержень (10) выполнены с возможностью вращения относительно друг друга посредством шарнира; а другой конец второго соединительного стержня (10) неподвижно соединен с ползуном (11), при этом второй соединительный стержень (10) параллелен длине кронштейна (12).
2. Устройство по п. 1, отличающееся тем, что ползун (11) соединен с кронштейном (12) посредством линейного желоба скольжения на кронштейне (12).
3. Устройство по п. 1 или 2, отличающееся тем, что широкополосный источник (1) света требует обработку для обеспечения защиты от эффекта взрыва.
4. Устройство по п. 1 или 2, отличающееся тем, что вращающаяся в градиентной среде пластина (4) имеет показатель преломления, постепенно меняющийся по длине, а также обладает оптической активностью; и специфическое вращение вращающейся в градиентной среде пластины (4) по длине и положение по длине удовлетворяют линейному отношению: α=kx, где α - специфическое вращение некоторого положения по длине на вращающейся в градиентной среде пластине (4), x - расстояние от некоторого положения на вращающейся в градиентной среде пластине (4) до правого конца, а k - константа.
5. Устройство по п. 1 или 2, отличающееся тем, что хвостовое волокно поляризационного делителя (6) луча представляет собой оптическое волокно, сохраняющее поляризацию.
6. Устройство по п. 1 или 2, отличающееся тем, что модуль (7) обработки данных состоит из фотоэлектрического детектора, чипа обработки данных и устройства отображения; а также он используется для получения фазового угла поляризационного света путем вычисления оптической мощности и отображения фазового угла с помощью устройства отображения.
7. Устройство по п. 1, отличающееся тем, что длина второго соединительного стержня (10) больше длины вращающейся в градиентной среде пластины (4).
8. Устройство по п. 2, отличающееся тем, что ползун (11) входит в желоб скольжения кронштейна (12) благодаря смазыванию консистентной смазкой.
9. Способ определения угла коромысла врубовой машины на основе оптоволоконных измерений, реализуемый путем использования устройства по любому из пп. 1-8, который включает следующие этапы, на которых:
A: неподвижно соединяют соединительное основание (8) устройства с коромыслом (14) врубовой машины с использованием болтов; неподвижно соединяют корпус (13) датчика с корпусом врубовой машины с использованием болтов, причем обеспечивают, чтобы расстояние между центрами шарнирной оси (15) и второго соединительного стержня (10) равнялось 0; и размещают ползун (11) в крайнем правом исходном положении на желобе скольжения кронштейна (12);
B: обеспечивают попадание света, выходящего из широкополосного источника (1) света, в поляризатор (2) через одномодовое оптическое волокно с образованием линейно поляризованного света в поляризаторе (2) и обеспечивают попадание линейно поляризованного света, выходящего из поляризатора (2), в первую коллиматорную линзу (3) через вращающееся Hi-Bi PCF; обеспечивают прохождение линейного поляризованного света, выходящего из первой коллиматорной линзы (3), через вращающуюся в градиентной среде пластину (4) и последующее достижение второй коллиматорной линзы (5), причем плоскость поляризации линейного поляризованного света дает угол вращения во время прохождения через вращающуюся в градиентной среде пластину; обеспечивают попадание линейно поляризованного света, выходящего из второй коллиматорной линзы (5), в поляризационный делитель (6) луча через вращающееся Hi-Bi PCF; делят, посредством поляризационного делителя (6) луча, линейно поляризованный свет на две оптические составляющие в перпендикулярных направлениях и вводят оптические составляющие в модуль (7) обработки данных через одномодовое оптическое волокно; и анализируют, посредством модуля (7) обработки данных, оптический сигнал с получением фазового угла линейно поляризованного света, причем фазовый угол - ϕ=αd=kxd, при этом x - расстояние от некоторого положения на вращающейся в градиентной среде пластине (4) до правого конца, d - толщина вращающейся в градиентной среде пластины, а k - константа;
C: соединяют коромысло врубовой машины с тяговым корпусом врубовой машины путем использования шарнирной оси; при работе врубовой машины коромысло (14) врубовой машины поворачивается с шарнирной осью (15) в качестве оси вращения для осуществления добычи угля, а ползун (11) перемещается влево по прямой линии относительно вращающейся в градиентной среде пластины (4) во время подъема и поворота коромысла (14); и задают угол вращения коромысла (14) врубовой машины, как Δα, причем в этом случае ползун (11) имеет смещение x, и смещение x ползуна (11) и угол Δα поворота коромысла (14) удовлетворяют следующему отношению:

где x - расстояние от положения ползуна (11) до крайнего правого исходного положения на желобе скольжения кронштейна (12), l1 - длина первого соединительного стержня (9), l2 - расстояние от центра положения соединительного основания (8) на коромысле (14) до шарнирной оси (15), α0 - угол раскрытия между вектором направления линии, по которой проходит центральная ось исходного положения коромысла (14), и вектором направления линии, по которой проходит длина второго соединительного стержня (10), а Δα - угол поворота коромысла (14), который является положительным при повороте по часовой стрелке и отрицательным при повороте против часовой стрелки; и
D: обеспечивают перемещение первой коллиматорной линзы (3) и второй коллиматорной линзы (5) вместе с ползуном (11) по прямой линии вдоль длины второго соединительного стержня (10), причем положение на вращающейся в градиентной среде пластине (4), через которое проходит линейно поляризованный свет, выходящий из первой коллиматорной линзы (3), меняется соответствующим образом, а также меняется угол вращения плоскости поляризации линейно поляризованного света после прохождения через вращающуюся в градиентной среде пластину; функциональное отношение между фазовыми углами ϕ, полученными посредством модуля (7) обработки данных и соответствующими различным положениям ползуна (12), и углами Δα поворота коромысла (15) является следующим:

и,
следовательно, фазовые углы ϕ и углы Δα поворота находятся во взаимно-однозначном соответствии, то есть угол поворота коромысла может быть определен в соответствии с полученным фазовым углом линейно поляризованного света.
| CN 109916295 A, 21.06.2019 | |||
| CN 103776418 A), 07.05.2014 | |||
| CN 206291886 U, 30.06.2017 | |||
| CN 105530399 A, 27.04.2016 | |||
| CN 204140070 U, 04.02.2015 | |||
| DE 102012021971 A1, 08.05.2014. |

