Настоящая заявка испрашивает приоритет согласно ст. 4 и 8 Стокгольмского акта Парижской конвенции по охране промышленной собственности в соответствии с предварительной патентной заявкой США № 62/883,323, поданной 6 августа 2019, и предварительной патентной заявкой США № 62/753,969, поданной 1 ноября 2018, включенными в настоящую заявку посредством ссылки во всей их полноте.
Область техники
Изобретение относится к устройству для проверки гидравлического соединения, в частности, к устройству для проверки соединения, указывающему на состояние соединения на месте и/или дистанционно посредством проводной или беспроводной передачи.
Предшествующий уровень техники
Гидравлические соединители являются неотъемлемыми компонентами множества различных устройств, в частности, устройств автомобильной промышленности. Поскольку автомобильная система состоит из различных компонентов, таких как радиатор, трансмиссия и двигатель, текучая среда должна иметь возможность перемещаться не только внутри каждого компонента, но и между ними. Примером текучей среды, перемещающейся между компонентами, является трансмиссионная жидкость, движущаяся от трансмиссии к охладителю трансмиссионного масла, чтобы снизить температуру трансмиссионной жидкости. Текучая среда преимущественно перемещается между компонентами посредством гибких и/или жестких шлангов, которые соединяются с каждым компонентом посредством гидравлических соединителей. Такие гидравлические соединители обычно содержат фиксирующий зажим или пружинное стопорное кольцо, установленное на гидравлическом соединителе, которое защелкивается за выступающим заплечиком конца трубы, когда указанный конец трубы полностью вставлен в гидравлический соединитель. Если конец трубы не полностью вставлен в гидравлический соединитель, может произойти нарушение гидравлического соединения, что приведет к утечке текучей среды и возможно другим, более серьезным последствиям.
Таким образом, уже давно существует необходимость создания устройства для проверки соединения для обеспечения надежного гидравлического соединения.
Раскрытие изобретения
Согласно представленным аспектам предлагается устройство для проверки соединения, включающее в себя башмак, содержащий первую верхнюю поверхность, первую нижнюю поверхность, первую обращенную радиально наружу поверхность, первую обращенную радиально внутрь поверхность, первое отверстие, расположенное между обращенной радиально наружу поверхностью и первой обращенной радиально внутрь поверхностью, и зонд, отходящий от первой нижней поверхности, а также схему, установленную в первом отверстии рядом с первой нижней поверхностью, функционально приспособленную для обнаружения усилия, действующего на зонд.
Согласно аспекту изобретения предлагается устройство для проверки соединения, взаимодействующее с гидравлическим соединением, содержащим конец трубы, гидравлический соединитель и пружинное стопорное кольцо, содержащее один или более выступов; указанное устройство для проверки соединения содержит башмак, содержащий первую верхнюю поверхность, первую нижнюю поверхность, первую обращенную радиально наружу поверхность, первую обращенную радиально внутрь поверхность, первое отверстие, расположенное между первой обращенной радиально наружу поверхностью и первой обращенной радиально внутрь поверхностью, и зонд, содержащий контактную кромку, функционально приспособленную для зацепления с пружинным стопорным кольцом, а также схему, функционально размещенную в первом отверстии для обнаружения усилия, приложенного к зонду, и корпус, предназначенный для взаимодействия с первым отверстием и заключения схемы внутри башмака.
Согласно представленным аспектам предлагается устройство для проверки соединения для взаимодействия с гидравлическим соединением, включающим в себя конец трубы, гидравлический соединитель и пружинное стопорное кольцо с одним или более выступами. Указанное устройство для проверки соединения содержит башмак, содержащий отверстие, и зонд, содержащий переднюю кромку, функционально приспособленную для зацепления с пружинным стопорным кольцом, а также схему, расположенную в указанном отверстии. Указанная схема функционально приспособлена для обнаружения одного или более усилий, приложенных к передней кромке. Указанное устройство для проверки соединения функционально приспособлено для определения правильности соединения на основании одного или более усилий, действующих на переднюю кромку.
Эти и другие объекты изобретения, его особенности и преимущества станут более ясными после ознакомления с приведенным далее его подробным описанием со ссылками на чертежи, а также с формулой изобретения.
Краткое описание чертежей
Далее приведено подробное описание нескольких возможных вариантов осуществления изобретения только в качестве примера, со ссылками на чертежи, на которых соответствующие части обозначены соответствующими ссылочными позициями.
На фиг. 1 показано устройство для проверки соединения, вид в перспективе;
на фиг. 2 - устройство для проверки соединения на фиг. 1 в разобранном состоянии, вид в перспективе;
на фиг. 3 - башмак на фиг. 1, вид снизу в перспективе;
на фиг. 4A - схема, показанная на фиг. 2, вид сверху в перспективе;
на фиг. 4B - схема, показанная на фиг. 2, вид снизу в перспективе;
на фиг. 5 - устройство для проверки соединения, вид в разрезе по плоскости 5-5 на фиг. 1;
на фиг. 6 - часть 6 устройства для проверки соединения на фиг. 5, вид в увеличенном масштабе;
на фиг. 7 - устройство для проверки соединения на фиг. 1, сцепленное с гидравлическим соединением, вид в перспективе;
на фиг. 8 - устройство для проверки соединения, вид в разрезе по плоскости 8-8 на фиг. 7;
на фиг. 9 - часть 9 устройства для проверки соединения на фиг. 8, вид в увеличенном масштабе;
на фиг. 10 - схема и башмак, взаимодействующие с пружинным стопорным кольцом, вид сверху;
на фиг. 11 - устройство для проверки соединения, вид в перспективе;
на фиг. 12 - устройство для проверки соединения на фиг. 11 в разобранном состоянии, вид в перспективе;
на фиг. 13 - корпус на фиг. 11, вид снизу в перспективе;
на фиг. 14A - башмак на фиг. 11, вид спереди сверху, в перспективе;
на фиг. 14B - башмак на фиг. 11, вид сзади снизу, в перспективе;
на фиг. 14C - башмак на фиг. 11, вид сверху;
на фиг. 14D - башмак на фиг. 11, вид спереди;
на фиг. 14E - башмак на фиг. 11, вид справа;
на фиг. 15 - схема на фиг. 12, вид снизу в перспективе;
на фиг. 16A - устройство для проверки соединения, соединенное с тактильным устройством, вид спереди в перспективе;
на фиг. 16B - устройство для проверки соединения и тактильное устройство, показанные на фиг. 16A, вид сзади в перспективе;
на фиг. 17A - устройство для проверки соединения на фиг. 16A, вид снизу в перспективе;
на фиг. 17B - устройство для проверки соединения на фиг. 16A, вид сверху в перспективе;
на фиг. 18A - устройство для проверки соединения на фиг. 16A в разобранном состоянии, вид сверху в перспективе;
на фиг. 18B - устройство для проверки соединения на фиг. 16A в разобранном состоянии, вид снизу в перспективе;
на фиг. 19A - башмак на фиг. 16A, вид сверху в перспективе;
на фиг. 19B - башмак на фиг. 16A, вид снизу в перспективе;
на фиг. 20A - схема на фиг. 18A, вид сверху в перспективе;
на фиг. 20B - схема на фиг. 18B, вид снизу в перспективе; и
на фиг. 21 - устройство для проверки соединения, вид в разрезе по плоскости 21-21 на фиг. 17B.
Варианты осуществления изобретения
Прежде всего следует отметить, что идентичные или функционально аналогичные конструкционные элементы на различных чертежах обозначены одинаковыми ссылочными позициями. Также следует иметь в виду, что формула изобретения не ограничивается раскрытыми в описании аспектами изобретения.
Кроме того, следует иметь в виду, что изобретение не ограничивается конкретными способами, материалами и модификациями, раскрываемыми в описании, и, следовательно, может изменяться. Также подразумевается, что используемая в документе терминология предназначена для описания только раскрываемых конкретных аспектов изобретения, и никоим образом не ограничивает объем прав, определяемый формулой изобретения.
Если не указано иное, все используемые технические и научные понятия имеют значение, подразумеваемое обычно специалистом среднего уровня в области, к которой относится изобретение. Следует иметь в виду, что при практическом применении или испытании примерных вариантов осуществления изобретения могут быть использованы любые способы, устройства или материалы, аналогичные или эквивалентные описанным в настоящем документе. Узел, согласно изобретению, может приводиться в действие с помощью гидравлики, электроники и/или пневматики.
Следует иметь в виду, что понятие «по существу» является синонимом таких понятий, как «близко», «очень близко», «около», «приблизительно», «вблизи», «почти», «примерно», «практически», «приближенно», «в районе» и т.д., и такие понятия могут использоваться взаимозаменяемо, как видно из описания и формулы изобретения. Следует понимать, что понятие «вблизи» является синонимом таких понятий, как «рядом», «близко», «прилегающий», «соседний», «непосредственный», «смежный» и т.д. И такие понятия могут использоваться взаимозаменяемо, как видно из описания и формулы изобретения. Понятие «приблизительно» предназначен для обозначения значений в пределах десяти процентов от указанного значения.
Следует понимать, что союз «или» используется для указания на «неисключительную» конструкцию, если не указано иное. Например, если указывается, что «элемент х представляет собой A или B», это может означать одно из следующего: (1) элемент х представляет собой либо A, либо B; (2) элемент х представляет собой одновременно как A, так и B. Иными словами, союз «или» не используется для указания на конструкцию «исключительно или». Например, конструкция «исключительно или» применительно к приведенному выше примеру «элемент х представляет собой A или B» означает, что х может представлять собой либо A, либо B. Кроме того, используемое «и/или» представляет собой грамматический союз, предназначенный для указания на то, что один или несколько из перечисленных элементов или условий могут быть включены или могут иметь место. Например, устройство, содержащее первый элемент, второй элемент и/или третий элемент, может представлять собой одно из следующих устройств: устройство, содержащее первый элемент; устройство, содержащее второй элемент; устройство, содержащее третий элемент; устройство, содержащее первый и второй элементы; устройство, содержащее первый и третий элементы; устройство, содержащее первый элемент, второй элемент и третий элемент; или устройство, содержащее второй элемент и третий элемент.
Кроме того, используемые выражения «содержит по меньшей мере один из» и «содержащий по меньшей мере один из» применительно к системе или компоненту предназначены для обозначения того, что рассматриваемая система или компонент включает в себя один или более из элементов, указанных после данного выражения. Например, выражение «устройство, содержащее по меньшей мере один из следующих элементов, а именно: первый элемент, второй элемент и третий элемент» предназначено для обозначения устройства, содержащего первый элемент; устройства, содержащего второй элемент; устройства, содержащего третий элемент; устройства, содержащего первый и второй элементы; устройства, содержащего первый и третий элементы; устройства, содержащего первый элемент, второй элемент и третий элемент; или устройства, содержащего второй элемент и третий элемент. Применяемое выражение «используется в по меньшей мере одном из» имеет аналогичное значение. Кроме того, используемое понятие «и/или» представляет собой грамматический союз, предназначенный для указания на то, что один или более из перечисленных элементов или условий могут быть включены или могут иметь место. Например, устройство, содержащее первый элемент, второй элемент и/или третий элемент, может представлять собой одно из следующих устройств: устройство, содержащее первый элемент; устройство, содержащее второй элемент; устройство, содержащее третий элемент; устройство, содержащее первый и второй элементы; устройство, содержащее первый и третий элементы; устройство, содержащее первый элемент, второй элемент и третий элемент; или устройство, содержащее второй элемент и третий элемент.
Под «элементами, соединенными без возможности вращения», понимается то, что указанные элементы соединены так, что при вращении одного элемента вращаются все элементы, и относительно вращение между элементами невозможно. Радиальное и/или осевое перемещение соединенных без возможности вращения элементов относительно друг друга является возможным, но не обязательным.
Обращаясь к чертежам, видно, что на фиг. 1 показано устройство 10 для проверки соединения, вид в перспективе. На фиг. 2 показано устройство 10 для проверки соединения в разобранном состоянии, вид в перспективе. Устройство 10 для проверки соединения в целом содержит крышку 20, корпус 40, схему или печатную плату 60, башмак 80 и проем 11. Когда устройство 10 для проверки соединения находится в полностью собранном состоянии, крышка 20, корпус 40, схема 60 и башмак 80 соединены друг с другом без возможности вращения. Относительно фиг. 1-2 необходимо отметить следующее.
Крышка 20 содержит верхнюю поверхность 22, нижнюю поверхность 24, обращенную радиально внутрь поверхность 26, обращенную радиально наружу поверхность 28 и проем 21. Как правило, крышка 20 имеет цилиндрическую форму, однако, следует иметь в виду, что крышка 20 может иметь любую геометрическую форму, подходящую для сопряжения с корпусом 40, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Крышка 20 содержит также вставляемую часть 30, соединенную с нижней поверхностью 24 и отходящую от неё. Обращенная радиально внутрь поверхность 26, по существу, концентрична обращенной радиально наружу поверхности 28. Обращенная радиально внутрь поверхность 26 образует проем 21, как показано на чертежах. Вставляемая часть 30 предназначена для введения в отверстие 56 корпуса 40. В некоторых вариантах осуществления крышка 20 прикреплена к корпусу 40 через посадку с натягом или прессовую посадку между вставляемой частью 30 и отверстием 56. В некоторых вариантах осуществления крышка 20 прикреплена к корпусу 40 через адгезив или другим подходящим способом соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. Следует отметить, что в некоторых вариантах осуществления крышка 20 может не содержать вставляемой части 30, а может быть прикреплена к верхней поверхности 42. Когда крышка 20 прикреплена к корпусу 40, нижняя поверхность 24 примыкает к верхней поверхности 42 или расположена, по существу, рядом с ней.
Корпус 40 содержит верхнюю поверхность 42, нижнюю поверхность 44, обращенную радиально внутрь поверхность 46, обращенную радиально наружу поверхность 48 и проем. Как правило, корпус 40 имеет цилиндрическую форму, однако, следует иметь в виду, что корпус 40 может иметь любую геометрическую форму, подходящую для сопряжения с крышкой 20 и башмаком 80, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Корпус 40 содержит также вставляемую часть 50, соединенную с нижней поверхностью 44 и отходящую от неё. Обращенная радиально внутрь поверхность 46, по существу, концентрична обращенной радиально наружу поверхности 48. Обращенная радиально внутрь поверхность 46 образует проем, как показано на чертежах. Вставляемая часть 50 взаимодействует с башмаком 80. В частности, вставляемая часть 50 входит в отверстие 91 в башмаке 80 так, что, когда вставляемая часть 50 и башмак 80 соединены друг с другом, нижняя поверхность 52 примыкает к поверхности 90 или расположена, по существу, рядом с ней. В некоторых вариантах осуществления корпус 40 прикреплен к башмаку 80 с помощью посадки с натягом или прессовой посадки между вставляемой частью 50 и отверстием 91. В некоторых вариантах осуществления корпус 40 прикреплен к башмаку 80 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. Следует отметить, что в некоторых вариантах осуществления корпус 40 может не содержать вставляемой части 50 и может быть прикреплен к верхней поверхности 82. Когда корпус 40 прикреплен к башмаку 80, нижняя поверхность 44 примыкает к поверхности 82 или расположена, по существу, рядом с ней. Корпус 40 дополнительно содержит один или более вертикальных элементов, соединенных с нижней поверхностью 52 и отходящих от неё. В некоторых вариантах осуществления корпус 40 не содержит вставляемой части 50, и один или более вертикальных элементов соединены с нижней поверхностью 44 и отходят от неё. В рассматриваемом варианте осуществления корпус 40 содержит три вертикальных элемента 54A-C, соединенных с нижней поверхностью 52 и отходящих от неё. Вертикальные элементы 54A-C разнесены по окружности так, что они контактируют или доходят до ближайших датчиков 70A-C, расположенных на верхней поверхности 62 схемы 60, как будет более подробно раскрыто далее. В некоторых вариантах осуществления вертикальный элемент 54B разнесен по окружности на угол приблизительно 90° относительно вертикального элемента 54A, вертикальный элемент 54C разнесен по окружности на угол приблизительно 90° относительно вертикального элемента 54B, и вертикальный элемент 54A разнесен по окружности на угол приблизительно 180° относительно вертикального элемента 54C.
На фиг. 3 показан башмак 80, вид снизу в перспективе. Башмак 80 содержит верхнюю поверхность 82, нижнюю поверхность 84, обращенную радиально внутрь поверхность 86, обращенную радиально наружу поверхность 88 и проем 81. Как правило, башмак 80 имеет цилиндрическую форму, однако, следует иметь в виду, что корпус 80 может иметь любую геометрическую форму, подходящую для сопряжения с корпусом 40 и схемой 60, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Обращенная радиально внутрь поверхность 86, по существу, концентрична обращенной радиально наружу поверхности 88. Обращенная радиально внутрь поверхность 86 образует проем 81, как показано на чертежах. Башмак 80 дополнительно содержит отверстие 91, проходящее от верхней поверхности 82 до поверхности 90, и отверстие 93, проходящее от поверхности 90 до поверхности 98 (см. фиг. 5 и 6). Как было указано выше, отверстие 91 предназначено для вхождения в него вставляемой части 50 так, чтобы нижняя поверхность 44 примыкала к верхней поверхности 82 или была расположена, по существу, рядом с ней, а нижняя поверхность 52 примыкала к поверхности 90 или располагалась, по существу, рядом с ней. Когда корпус 40 и башмак 80 полностью соединены друг с другом, вертикальные элементы 54A-C проходят вниз в отверстие 93. В отверстии 93 установлена схема 60. В некоторых вариантах осуществления схема 60 прикреплена к башмаку 80 с помощью посадки с натягом или прессовой посадки между обращенной радиально наружу поверхностью 68 и отверстием 93. В некоторых вариантах осуществления схема 60 закреплена в башмаке 80 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. Башмак 80 дополнительно содержит зонд 92, соединенный с нижней поверхностью 84 и отходящий от неё. Зонд 92 содержит обращенную радиально внутрь поверхность 94 и контактную кромку 96. Контактная кромка 96 предназначена для вхождения в контакт с пружинным стопорным кольцом гидравлического соединения с целью определения правильности гидравлического соединения, как будет более подробно описано далее. В некоторых вариантах осуществления башмак 80 выполнен в виде единого формованного эластичного резинового элемента. В некоторых вариантах осуществления поверхность 98 дополнительно снабжена одной или более опорами 100. Опоры 100 расположены между поверхностью 98 и датчиками 72.
На фиг. 4A представлена схема 60, вид сверху в перспективе. На фиг. 4B показана схема 60, вид снизу в перспективе. На фиг. 5 показано устройство 10 для проверки соединения, вид в разрезе по плоскости 5-5 на фиг. 1. На фиг. 6 показана часть 6 устройства 10 для проверки соединения на фиг. 5, вид в увеличенном масштабе. Относительно фиг. 2-6 необходимо отметить следующее.
В некоторых вариантах осуществления схема 60 представляет собой печатную плату (например, плату с печатной схемой). Схема 60 содержит верхнюю поверхность 62, нижнюю поверхность 64, обращенную радиально внутрь поверхность 66, обращенную радиально наружу поверхность 68 и проем 61. Как правило, схема 60 имеет дисковидную или цилиндрическую форму, однако, следует иметь в виду, что схема 60 может иметь любую геометрическую форму, пригодную для размещения схемы 60 в башмаке 80, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Обращенная радиально внутрь поверхность 66, по существу, концентрична обращенной радиально наружу поверхности 68. Обращенная радиально внутрь поверхность 66 образует проем 61, как показано на чертежах. Как было указано выше, схема 60 установлена внутри башмака 80, точнее, в отверстии 93, так, что нижняя поверхность 64 примыкает к поверхности 98 или расположена, по существу, рядом с ней (см. фиг. 5 и 6). В некоторых вариантах осуществления схема 60 прикреплена к башмаку 80 с помощью посадки с натягом или прессовой посадки между обращенной радиально наружу поверхностью 68 и отверстием 93. В некоторых вариантах осуществления схема 60 закреплена в башмаке 80 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. В некоторых вариантах осуществления схема 60 представляет собой печатную плату. Схема 60 дополнительно содержит один или более датчиков, расположенных на верхней поверхности 62. В рассматриваемом варианте осуществления схема 60 содержит три датчика 70A-C, расположенных на верхней поверхности 62. Датчики 70A-C представляют собой дифференциально-пусковые датчики, функционально предназначенные для взаимодействия с корпусом 40, в частности, с вертикальными элементами 54A-C, соответственно, для запуска тестирования (после того, как пользователь приложил достаточное усилие для достижения заданного граничного значения) и обеспечения дифференциального базового усилия, которое может быть использовано для компенсации неравномерно распределенного давления, приложенного пользователем (иными словами, датчики 70A-C предназначены для определения, прикладывает ли пользователь равномерное давление к устройству 10 для проверки соединения). Датчики 70A-C разнесены по окружности на верхней поверхности 62 так, что они совмещены с соответствующими вертикальными элементами 54A-C. В некоторых вариантах осуществления датчик 70B разнесен по окружности на угол приблизительно 90° относительно датчика 70A, датчик 70C разнесен по окружности на угол приблизительно 90° относительно датчика 70B, и датчик 70A разнесен по окружности на угол приблизительно 180° относительно датчика 70C. Схема 60 дополнительно содержит один или более датчиков 72, расположенных на нижней поверхности 64. Датчики 72 представляют собой входные датчики (группу входных датчиков), функционально предназначенных для обнаружения усилий, действующих на зонд 92, с целью определения наличия выступа пружинного стопорного кольца (иными словами, если будут обнаружены два выступа, это значит, что гидравлическое соединение соединено правильно). В рассматриваемом варианте осуществления схема содержит датчики 72A-L, разнесенные по окружности на нижней поверхности 64. Датчики 72A-L будут обнаруживать усилия одинаковой величины, если зонд 92 прижимается к плоской поверхности (например, к поверхности заплечика конца трубы, как будет более подробно объяснено далее), указывая, таким образом, на то, что выступы отсутствуют (т.е. кольцо защелкнулось за заплечиком конца трубы), и что гидравлическое соединение соединено неправильно. Как показано на фиг. 5 и 6, вертикальный элемент 54B проходит вниз через отверстие 93 от нижней поверхности 44 и заканчивается на датчике 70B. Вертикальный элемент 54A с датчиком 70A, а также вертикальный элемент 54C с датчиком 70C выполнены, по существу, в такой же конфигурации. Когда к верхней поверхности 22 прикладывается усилие, сжатие, возникающее между вертикальными элементами 54A-C и датчиками 70A-C, обеспечивает базисную переменную, позволяющую пользователю определить, какая сила давления была приложена. Эта базисная переменная должна быть больше или равна заданному граничному значению. В некоторых вариантах осуществления в качестве датчиков 70A-C и 72 используются датчики ForceTouch™ или ForceGauge™ компании NextInput, Inc. Однако следует отметить, что в качестве датчиков 70A-C и 72 могут быть использованы любые датчики, пригодные для определения входного усилия от зонда 92 и, соответственно, давления, прикладываемого пользователем.
Схема 60 представляет собой любую подходящую схему, способную указывать, когда датчики 72 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, указывая, таким образом, на правильность или неправильность гидравлического соединения. В некоторых вариантах осуществления схема 60 содержит индикаторное устройство, такое как сигнальная лампа, которое включается, если датчики 72 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, указывая, таким образом, на правильное соединение. В некоторых вариантах осуществления схема 60 содержит вибрационное устройство (например, вибрационный мотор), которое включается, если датчики 72 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, и заставляет вибрировать устройство 10 для проверки соединения, указывая, таким образом, на правильное соединение. Например, вибрационное устройство может представлять собой тактильное устройство, выполненное в форме мотора с эксцентриковым кулачком, или пьезоэлектрическое устройство, которое вибрирует в ответ на приложенную форму волны. Пьезоэлектрическое устройство может также создавать звуковой выходной сигнал. В некоторых вариантах осуществления схема 60 содержит звуковое сигнальное устройство (например, динамик и любое другое звуковое оборудование), которое включается, если датчики 72 обнаруживают подходящее усилие в одном или более (например, двух) местах по окружности, и заставляет динамик выдавать звуковой сигнал, указывающий на правильность соединения. Схема 60 может также содержать микроконтроллер, содержащий один или более центральных процессоров (ЦП) с запоминающим устройством и программируемыми периферийными устройствами ввода-вывода. Как более подробно описано далее, микроконтроллер может быть использован для активации сигнальной лампы (или другого индикаторного устройства) при проверке правильности соединения, запуска с помощью устройства передачи данных передачи сигнала на дистанционно расположенное принимающее устройство, указывающее на правильность (или неправильность) соединения, и активации средства индикации отказа приспособления.
Устройство 10 для проверки соединения дополнительно содержит устройство передачи данных, электрически соединенное со схемой 60 и, при необходимости, с запоминающим устройством или микроконтроллером. Устройство передачи данных предназначено для передачи на дистанционно расположенное место сигнала, указывающего на правильность или неправильность гидравлического соединения. В некоторых вариантах осуществления устройство передачи данных выполнено с возможностью передачи сигнала по электрическому кабелю, такому как волоконно-оптический кабель (т.е. посредством соединения в физической форме). В устройстве передачи данных может использоваться связь интегральных схем (I2C), локальная сеть контроллеров (CAN), коммутируемая локальная сеть (LIN), или любой другой известный подходящий протокол связи. В некоторых вариантах осуществления устройство передачи данных приспособлено для беспроводной передачи дистанционно расположенному принимающему устройству (т.е. сигнала о правильном или неправильном гидравлическом соединении), которые оно регистрирует. Устройство передачи данных может осуществлять передачу данных с помощью любого подходящего способа, известного в данной области техники, например, с помощью связи Bluetooth®, радиочастотной, инфракрасной связи, или связи Wi-Fi®. В некоторых вариантах осуществления устройство передачи данных может передавать идентификационный номер гидравлического соединения, идентификационный номер устройства для проверки соединения, остаточный ресурс устройства для проверки соединения, идентификационный номер транспортного средства (VIN), номер компонента (например, двигателя, радиатора и т.д.), а также серийный номер данного компонента, подтверждение правильности гидравлического соединения или указание на неправильное гидравлическое соединение. В некоторых вариантах осуществления устройство для проверки соединения может работать совместно с другим устройством, таким как компьютер, с целью регистрации в электронном виде результатов каждой проверки и распечатки свидетельства о правильности/неправильности соединения.
Устройство 10 для проверки соединения может дополнительно содержать средство индикации отказа приспособления, такое как световое, вибрационное или звуковое сигнальное устройство, для индикации того, что устройство 10 для проверки соединения необходимо заменить. В таком варианте осуществления устройство 10 для проверки соединения может, например, включать в себя запоминающее устройство или микроконтроллер, запрограммированный на предварительно определенное количество операций применения, таким образом, что если устройство 10 для проверки соединения будет использовано большее количество раз, чем заданное, произойдет активация средства индикации отказа приспособления (т.е. включится световое устройство, начнет вибрировать вибрационное устройство, или звуковое сигнальное устройство выдаст звуковой сигнал). Микроконтроллер может также подсчитывать количество случаев использования устройства 10 для проверки соединения, и производить расчет по заложенной методике оставшегося срока службы и коэффициента безопасности, непрерывно определяя остаточный срок службы устройства для проверки соединения.
На фиг. 7 показано устройство 10 для проверки соединения, сцепленное с гидравлическим соединением 160, вид в перспективе. На фиг. 8 показано устройство 10 для проверки соединения, вид в разрезе по плоскости 8-8 на фиг. 7. На фиг. 9 показана часть 9 устройства 10 для проверки соединения на фиг. 8, вид в увеличенном масштабе. Относительно фиг. 1-9 необходимо отметить следующее. Гидравлическое соединение 160, как правило, включает в себя конец 120 трубы, гидравлический соединитель 140 и пружинное стопорное кольцо 150.
Конец 120 трубы содержит торец 122, участок 123, заплечик 127, участок 129, торец 132 и сквозное отверстие 121. Сквозное отверстие 121 проходит сквозь конец 120 трубы от торца 122 до торца 132. Участок 123 расположен между торцом 122 и заплечиком 127 и содержит обращенную наружу поверхность 124. Обращенная наружу поверхность 124 имеет, по существу, постоянный диаметр. Заплечик 127 расположен между участком 123 и участком 129 и имеет обращенную наружу поверхность 126. Обращенная наружу поверхность 126 имеет линейную коническую форму и увеличивается в диаметре в осевом направлении AD2. Участок 129 расположен заплечиком 127 и торцом 132 и содержит обращенную наружу поверхность 130. В рассматриваемом варианте осуществления обращенная наружу поверхность 130 имеет переменный диаметр, который является постоянным в области от торца 132 до области рядом с поверхностью 128 заплечика, а затем в области рядом с поверхностью 128 заплечика её диаметр увеличивается. В некоторых вариантах осуществления обращенная радиально наружу поверхность 130 имеет, по существу, постоянный диаметр. Заплечик 127 соединен с обращенной радиально наружу поверхностью 130 поверхностью 128 заплечика. Конец 120 трубы предназначен для вставления, в частности, торцом 122 вперед, в гидравлический соединитель 140. Конец 120 трубы может иметь линейную или нелинейную (т.е. криволинейную) наклонную поверхность, и его вставляют в гидравлический соединитель 140 до тех пор, пока пружинное стопорное кольцо 150 не защелкнется через заплечик 127. Следует отметить, что конец 120 трубы может быть любым обычным концом трубы, содержащим наклонную часть, которая расширяется радиально наружу и в осевом направлении на внешней поверхности конца трубы, чтобы сместить пружинное стопорное кольцо или проволочный зажим в гидравлический соединитель так, чтобы зафиксировать конец трубы в гидравлическом соединителе. Чтобы определить, правильно ли соединено гидравлическое соединение 160, устройство 10 для проверки соединения, по существу, определяет, защелкнулось ли пружинное стопорное кольцо 150 через заплечик 127, как будет более подробно пояснено далее.
Гидравлический соединитель 140 содержит сквозное отверстие 142, обращенную радиально внутрь поверхность 144, обращенную радиально внутрь поверхность 146 и обращенную радиально наружу поверхность 148. Обращенная радиально наружу поверхность 148 содержит канавку 149. В канавку 149 вставлено пружинное стопорное кольцо 150. Пружинное стопорное кольцо 150 содержит выступы 150A, 150B и 150C (см. фиг. 10). Выступы 150A-C проходят радиально внутрь через отверстия в канавке 149, чтобы взаимодействовать с заплечиком 127, в частности, с поверхностью 128 заплечика.
Чтобы проверить, правильно ли соединено гидравлическое соединение 160, устройство 10 для проверки соединения сначала устанавливают вокруг конца 120 через проем 11. Затем устройство 10 для проверки соединения сдвигают вниз по концу 120 трубы в осевом направлении AD1 до тех пор, пока оно не встанет в зацепленное положение, показанное на фиг. 7. На фиг. 7-9 устройство 10 для проверки соединения уже сдвинуто вниз по концу 120 трубы в осевом направлении AD1 до положения, в котором зонд 92, в частности, контактная кромка 96 входит в контакт с пружинным стопорным кольцом 150 или поверхностью 128 заплечика (не показано). Пользователь прикладывает усилие к верхней поверхности 22 или устройству 10 для проверки соединения, равное или превышающее предварительно определенное граничное значение, определяемое датчиками 70A-C. Если передняя кромка 96 находится в контакте с одним или более выступами, приложенная пользователем сила создает усилие, действующее на зонд 92, которое обнаруживается одним или более датчиками 72, расположенными по окружности в местах расположения одного или более выступов. Датчик, обнаруживающий усилие, действующее со стороны выступа на зонд 92, будет показывать усилие, более высокое, чем величина усилия на соседних или других датчиках, что указывает на то, что выступ присутствует, и что этот выступ правильно защелкнулся через заплечик 127. В некоторых вариантах осуществления, если датчики 70 обнаруживают, что по меньшей мере два выступа правильно защелкнуты через заплечик 127, это указывает на то, что гидравлическое соединение 160 соединено правильно. Как показано на фиг. 9, зонд 92 спускают вниз между концом 120 трубы и гидравлическим соединителем 140. Точнее, зонд 92 спускают вниз между обращенной радиально наружу поверхностью 130 и обращенной радиально внутрь поверхностью 144, чтобы ввести в контакт с одним или более выступами 150A-C пружинного стопорного кольца 150. Если на гидравлическом соединителе 140 не имеется пружинного стопорного кольца 150, контактная кромка 96 продолжит спускаться вниз до поверхности 128 заплечика (не показано). В таком случае прикладываемое пользователем усилие создаст усилие, действующее на зонд 92; однако, действующее на зонд 92 усилие будет равномерно распределено по передней кромке 96. При этом все датчики 72A-L будут показывать одинаковое значение усилия, что указывает на отсутствие выступа, т.е. на то, что пружинное стопорное кольцо 150 либо не соединено, либо неправильно соединено с гидравлическим соединением 160.
На фиг. 10 показаны схема 60 и башмак 80, взаимодействующие с пружинным стопорным кольцом 150, вид сверху. Схема 60 показана полупрозрачной, а зонд 92 показан пунктиром, чтобы переднюю кромку 96, взаимодействующую с выступами 150A-C, было лучше видно. Как видно из фиг. 10, прикладываемое пользователем усилие заставляет переднюю кромку 96 взаимодействовать с выступами, в данном случае, с выступами 150B и 150C. Такое взаимодействие приводит к отклонению зонда 92 и возникновению усилий, действующих по меньшей мере на датчик 72H, положение которого по окружности совпадает с положением выступа 150B, и на датчик 72B, положение которого по окружности совпадает с положением выступа 150C. Результирующие усилия, действующие на датчики 72H и 72B, по существу, больше результирующих усилий, действующих на датчики 72A, 72C-G и 72I-L, что указывает на то, что присутствуют два выступа (например, выступы 150B-C) пружинного стопорного кольца, и что гидравлическое соединение 160 соединено правильно. Датчики 72 обнаруживают градиент давления или изменение усилия по окружности зонда 92, а схема 60 и/или микроконтроллер и/или компьютер по данному градиенту давления определяют, присутствуют ли один или более выступов, и, если они присутствуют, это означает, что конец 120 трубы правильно соединен с гидравлическим соединителем 140.
В некоторых вариантах осуществления схема 60 вместо датчиков 72A-H содержит множество контактных площадок. В таком варианте осуществления опоры 100 или поверхность 98 будут контактировать непосредственно с контактными площадками, работая как отдельные переключатели. Башмак 80 может быть выполнен из металла или аналогичного проводящего материала, электрически соединенного с заземлением системы. Входные контактные площадки контролируются микроконтроллером и подтягиваются. Когда поверхность 98 или опоры 100 входят в контакт с входными контактными площадками, они создают короткое замыкание на землю, в результате чего входные контактные площадки оттягиваются ниже, что обнаруживается микроконтроллером (эффект срабатывания кромки).
В некоторых вариантах осуществления схема 60 выполнена гибкой и расположена на поверхности 98. В таком варианте осуществления один или более датчиков схемы 60 обнаруживают отклонение башмака 80. Когда отклонение зонда 92 в направлении по окружности становится равным предварительно определенному значению, это означает, что в данном месте присутствует выступ пружинного стопорного кольца.
На фиг. 11 представлено устройство 210 для проверки соединения, вид в перспективе. На фиг. 12 приведено устройство 210 для проверки соединения в разобранном состоянии, вид в перспективе. Устройство 210 для проверки соединения в целом содержит крышку 220, корпус 240, схему или печатную плату 260, башмак 280 и проем 211. Когда устройство 210 для проверки соединения находится в полностью собранном состоянии, крышка 220, корпус 240, схема 260 и башмак 280 соединены друг с другом без возможности вращения. Относительно фиг. 11-12 необходимо отметить следующее.
Крышка 220 содержит верхнюю поверхность 222, нижнюю поверхность 224, обращенную радиально внутрь поверхность 226, обращенную радиально наружу поверхность 228 и проем 221. Как правило, крышка 220 имеет цилиндрическую форму, однако, следует иметь в виду, что крышка 220 может иметь любую геометрическую форму, пригодную для сопряжения с корпусом 240, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Крышка 220 содержит также вставляемую часть 230, соединенную с нижней поверхностью 224 и отходящую от неё. Обращенная радиально внутрь поверхность 226, по существу, концентрична обращенной радиально наружу поверхности 228. Обращенная радиально внутрь поверхность 226 образует проем 221, как показано на чертежах. Вставляемая часть 230 вставляется в отверстие 256 корпуса 240. В некоторых вариантах осуществления крышка 220 прикреплена к корпусу 240 с помощью посадки с натягом или прессовой посадки между вставляемой частью 230 и отверстием 256. В некоторых вариантах осуществления крышка 220 прикреплена к корпусу 240 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. Следует отметить, что в некоторых вариантах осуществления крышка 220 может не содержать вставляемой части 230 и может прикрепляться к верхней поверхности 242. Когда крышка 220 прикреплена к корпусу 240, нижняя поверхность 224 примыкает к верхней поверхности 242 или расположена, по существу, рядом с ней.
На фиг. 13 показан корпус 240, вид снизу в перспективе. Относительно фиг. 11-13 необходимо отметить следующее. Корпус 240 содержит верхнюю поверхность 242, нижнюю поверхность 244, обращенную радиально внутрь поверхность 246, обращенную радиально наружу поверхность 248 и проем 241. Как правило, корпус 240 имеет цилиндрическую форму, однако, следует иметь в виду, что корпус 240 может иметь любую геометрическую форму, пригодную для сопряжения с крышкой 220 и башмаком 280, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Корпус 240 содержит также вставляемую часть 250, соединенную с нижней поверхностью 244 и отходящую от неё. Обращенная радиально внутрь поверхность 246, по существу, концентрична обращенной радиально наружу поверхности 248. Обращенная радиально внутрь поверхность 246 образует проем 241, как показано на чертежах. Вставляемая часть 250 взаимодействует с башмаком 280. В частности, вставляемая часть 250 взаимодействует с отверстием 291 в башмаке 280 так, что, когда вставляемая часть 250 и башмак 280 соединены друг с другом, нижняя поверхность 252 примыкает к поверхности 290 или расположена, по существу, рядом с ней. В некоторых вариантах осуществления корпус 240 прикреплен к башмаку 280 с помощью посадки с натягом или прессовой посадки между вставляемой частью 250 и отверстием 291. В некоторых вариантах осуществления корпус 240 прикреплен к башмаку 280 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. Следует отметить, что в некоторых вариантах осуществления корпус 240 может не содержать вставляемой части 250 и может быть прикреплен к верхней поверхности 282. Когда корпус 240 прикреплен к башмаку 280, нижняя поверхность 244 примыкает к верхней поверхности 282 или расположена, по существу, рядом с ней. Корпус 240 дополнительно содержит один или более вертикальных элементов, расположенных в отверстии 256. В некоторых вариантах осуществления корпус 240 не содержит вставляемой части 250. В рассматриваемом варианте осуществления корпус 240 содержит три вертикальных элемента 254A-C. Вертикальные элементы 254A-C разнесены по окружности так, что они контактируют или доходят до датчиков обнаружения 270A-C, расположенных на верхней поверхности 262 схемы 260, как будет более подробно пояснено далее. В некоторых вариантах осуществления вертикальный элемент 254B разнесен по окружности на угол приблизительно 90° относительно вертикального элемента 254A, вертикальный элемент 254C разнесен по окружности на угол приблизительно 90° относительно вертикального элемента 254B, и вертикальный элемент 254A разнесен по окружности на угол приблизительно 180° относительно вертикального элемента 254C.
На фиг. 14A показан башмак 280, вид спереди сверху, в перспективе. На фиг. 14B показан башмак 280, вид сзади снизу, в перспективе. На фиг. 14C показан башмак 280, вид сверху. На фиг. 14D показан башмак 280, вид спереди. На фиг. 14E показан башмак 280, вид справа. Относительно фиг. 11-14E необходимо отметить следующее. Башмак 280 содержит верхнюю поверхность 282, нижнюю поверхность 284, обращенную радиально внутрь поверхность 286, обращенную радиально наружу поверхность 288 и проем 281. Как правило, башмак 280 имеет цилиндрическую форму, однако, следует иметь в виду, что башмак 280 может иметь любую геометрическую форму, пригодную для сопряжения с корпусом 240 и схемой 260, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Обращенная радиально внутрь поверхность 286, по существу, концентрична обращенной радиально наружу поверхности 288. Башмак 280 дополнительно содержит отверстие 291, проходящее от верхней поверхности 282 до поверхности 290, и отверстие 293, проходящее от поверхности 290 до поверхности 298. Как было указано выше, отверстие 291 предназначено для вхождения в него вставляемой части 250 так, чтобы нижняя поверхность 244 примыкала к верхней поверхности 282 или была расположена, по существу, рядом с ней, а нижняя поверхность 252 примыкала к поверхности 290 или располагалась, по существу, рядом с ней. Когда корпус 240 и башмак 280 полностью соединены друг с другом, вертикальные элементы 254A-C проходят вниз в отверстие 293. В отверстии 293 установлена схема 260. В некоторых вариантах осуществления схема 260 прикреплена к башмаку 280 с помощью посадки с натягом или прессовой посадки между обращенной радиально наружу поверхностью 268 и отверстием 293 (т.е. обращенной радиально внутрь поверхностью 286). В некоторых вариантах осуществления схема 260 закреплена в башмаке 280 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. Башмак 280 дополнительно содержит зонд 292, соединенный с нижней поверхностью 284 и отходящий от неё. Зонд 292 содержит обращенную радиально внутрь поверхность 294 и контактную кромку 296. Контактная кромка 296 предназначена для вхождения в контакт с пружинным стопорным кольцом гидравлического соединения с целью определения правильности гидравлического соединения, как будет более подробно описано далее. В рассматриваемом варианте осуществления зонд 292 содержит один или более участков, а именно, участков 292A-H, отделенных друг от друга одной или более прорезями или пространствами 302. Благодаря разделению зонда 292 на участки 292A-H с помощью прорезей 302 устройство 210 для проверки соединения может лучше изолировать расположение по окружности выступов пружинного стопорного кольца, поскольку на соседние датчики приходится меньшее усилие. Например, если участок 292C расположен поверх выступа 150B, участок 292C будет отклонять и включать только датчик, положение которого по окружности совпадает с положением участка 292C, но не датчики, положение которых по окружности совпадает с положением участков 292B или 292D. В некоторых вариантах осуществления башмак 280 выполнен в виде единого формованного эластичного резинового элемента. В некоторых вариантах осуществления на поверхности 298 дополнительно содержится одна или более опор 300. Опоры 300 расположены между поверхностью 298 и датчиками 272. В некоторых вариантах осуществления имеется одна опора на участок зонда 292, как показано на фиг. 14C.
В некоторых вариантах осуществления схема 260 вместо датчиков 272A-H содержит множество контактных площадок. В таком варианте осуществления опоры 300 или поверхность 298 будут контактировать непосредственно с контактными площадками, работая как отдельные переключатели. Башмак 280 может быть выполнен из металла или аналогичного проводящего материала, электрически соединенного с заземлением системы. Входные контактные площадки контролируются микроконтроллером и подтягиваются. Когда поверхность 298 или опоры 300 входят в контакт с входными контактными площадками, они создают короткое замыкание на землю, в результате чего входные контактные площадки оттягиваются ниже, что обнаруживается микроконтроллером (эффект срабатывания кромки).
В некоторых вариантах осуществления схема 260 выполнена гибкой и расположена на поверхности 298. В таком варианте осуществления один или более датчиков схемы 260 обнаруживают отклонение башмака 280, а именно, участков 292A-H. Когда отклонение зонда 292 в направлении по окружности становится равным предварительно определенному расстоянию, это означает, что в данном месте присутствует выступ пружинного стопорного кольца.
На фиг. 15 приведена печатная плата 260, вид снизу в перспективе. Относительно фиг. 11-15 необходимо отметить следующее.
В некоторых вариантах осуществления схема 260 представляет собой плату (например, плату с печатной схемой). Схема 260 содержит верхнюю поверхность 262, нижнюю поверхность 264, обращенную радиально внутрь поверхность 266, обращенную радиально наружу поверхность 268 и проем 261. Как правило, схема 260 имеет дисковидную или цилиндрическую форму, однако, следует иметь в виду, что схема 260 может иметь любую геометрическую форму, пригодную для размещения схемы 260 в башмаке 280, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Обращенная радиально внутрь поверхность 266, по существу, концентрична обращенной радиально наружу поверхности 268. Обращенная радиально внутрь поверхность 266 образует проем 261, как показано на чертежах. Как было указано выше, схема 260 установлена внутри башмака 280, точнее, в отверстии 293 так, что нижняя поверхность 264 примыкает к поверхности 298 или расположена, по существу, рядом с ней. В некоторых вариантах осуществления схема 260 прикреплена к башмаку 280 с помощью посадки с натягом или прессовой посадки между обращенной радиально наружу поверхностью 268 и отверстием 293. В некоторых вариантах осуществления схема 260 фиксируется в башмаке 280 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. В некоторых вариантах осуществления схема 260 представляет собой печатную плату. Схема 260 дополнительно содержит один или более датчиков, расположенных на верхней поверхности 262. В рассматриваемом варианте осуществления схема 260 содержит три датчика 270A-C, расположенных на верхней поверхности 262. Датчики 270A-C представляют собой дифференциально-пусковые датчики, функционально предназначенные для взаимодействия с корпусом 240, в частности, с вертикальными элементами 254A-C, соответственно, для запуска тестирования (после того, как пользователь приложил достаточное усилие для достижения предварительно определенного граничного значения) и обеспечения дифференциального базового усилия, которое может быть использовано для компенсации неравномерности усилия, приложенного пользователем (иными словами, датчики 270A-C предназначены для определения, прикладывает ли пользователь равномерное усилие к устройству 210 для проверки соединения). Датчики 270A-C разнесены по окружности на верхней поверхности 262 так, что их положение совпадает с положением соответствующих вертикальных элементов 254A-C. В некоторых вариантах осуществления датчик 270B разнесен по окружности на угол приблизительно 90° относительно датчика 270A, датчик 270C разнесен по окружности на угол приблизительно 90° относительно датчика 270B, и датчик 270A разнесен по окружности на угол приблизительно 180° относительно датчика 270C. Схема 260 дополнительно содержит один или более датчиков 272, расположенных на нижней поверхности 264. Датчики 272 представляют собой входные датчики (группу входных датчиков), функционально предназначенных для обнаружения усилий, действующих на зонд 292, с целью определения наличия выступа пружинного стопорного кольца (иными словами, если будут обнаружены два выступа, это значит, что гидравлическое соединение соединено правильно). В рассматриваемом варианте осуществления схема содержит датчики 272A-L, разнесенные по окружности на нижней поверхности 264. Датчики 272A-L будут обнаруживать усилия одинаковой величины, если зонд 292 прижимается к плоской поверхности (например, к поверхности заплечика конца трубы), указывая, таким образом, на то, что выступы отсутствуют (т.е. кольцо защелкнулось за заплечиком конца трубы), и что гидравлическое соединение соединено неправильно. Вертикальные элементы 254A-C проходят вниз по отверстию 293 и заканчиваются на соответствующих датчиках 70A-C. Когда к верхней поверхности 222 прикладывается усилие, сжатие, возникающее между вертикальными элементами 254A-C и датчиками 270A-C, обеспечивает базисную переменную, позволяющую пользователю определить, какая сила давления была приложена. Эта базисная переменная должна быть больше или равна предварительно определенному граничному значению. В некоторых вариантах осуществления в качестве датчиков 270A-C и 272 используются датчики ForceTouch™ или ForceGauge™ компании NextInput, Inc. Однако следует отметить, что в качестве датчиков 270A-C и 272 могут быть использованы любые датчики, пригодные для определения входного усилия от зонда 292 и, соответственно, давления, прикладываемого пользователем.
Схема 260 представляет собой любую подходящую схему, способную указывать, когда датчики 272 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, указывая, таким образом, на правильность или неправильность гидравлического соединения. В некоторых вариантах осуществления схема 260 содержит индикаторное устройство, такое как сигнальная лампа, которое включается, если датчики 272 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, указывая, таким образом, на правильное соединение. В некоторых вариантах осуществления схема 260 содержит вибрационное устройство (например, вибрационный мотор), которое включается, если датчики 272 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, и заставляет вибрировать устройство 210 для проверки соединения, указывая, таким образом, на правильное соединение. Например, вибрационное устройство может представлять собой тактильное устройство, выполненное в форме мотора с эксцентриковым кулачком или пьезоэлектрического устройства, которое вибрирует в ответ на определенную форму волны. Пьезоэлектрическое устройство может также создавать звуковой выходной сигнал. В некоторых вариантах осуществления схема 260 содержит звуковое сигнальное устройство (например, динамик и любое другое звуковое оборудование), которое включается, если датчики 272 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, и заставляет динамик выдавать звуковой сигнал, указывающий на правильность соединения. Схема 260 может также содержать микроконтроллер, содержащий один или более центральных процессоров (ЦП) с запоминающим устройством и программируемыми периферийными устройствами ввода-вывода. Как более подробно описано далее, микроконтроллер может быть использован для активации сигнальной лампы (или другого индикаторного устройства) при проверке правильности соединения, запуска с помощью устройства передачи данных передачи сигнала на дистанционно расположенное принимающее устройство, указывающее на правильность (или неправильность) соединения, и активации средства индикации отказа приспособления.
Устройство 210 для проверки соединения дополнительно содержит устройство передачи данных, электрически соединенное со схемой 260 и, при необходимости, с запоминающим устройством или микроконтроллером. Устройство передачи данных предназначено для передачи на дистанционно расположенное устройство сигнала, указывающего на правильность или неправильность гидравлического соединения. В некоторых вариантах осуществления устройство передачи данных выполнено с возможностью передачи сигнала по электрическому кабелю, такому как волоконно-оптический кабель (т.е. посредством соединения в физической форме). В устройстве передачи данных может использоваться связь интегральных схем (I2C), локальная сеть контроллеров (CAN), коммутируемая локальная сеть (LIN), или любой другой известный подходящий протокол связи. В некоторых вариантах осуществления устройство передачи данных предназначено для беспроводной передачи дистанционно расположенному принимающему устройству данных (т.е. сигнала о правильном или неправильном гидравлическом соединении), которые оно регистрирует. Устройство передачи данных может осуществлять передачу данных с помощью любого подходящего способа, известного в данной области техники, например, с помощью связи Bluetooth®, радиочастотной, инфракрасной связи, или связи Wi-Fi®. В некоторых вариантах осуществления устройство передачи данных может передавать идентификационный номер гидравлического соединения, идентификационный номер устройства для проверки соединения, остаточный ресурс устройства для проверки соединения, идентификационный номер транспортного средства (VIN), номер компонента (например, двигателя, радиатора и т.д.), а также серийный номер данного компонента, подтверждение правильности гидравлического соединения или указание на неправильное гидравлическое соединение. В некоторых вариантах осуществления устройство для проверки соединения может работать совместно с другим устройством, таким как компьютер, с целью регистрации в электронном виде результатов каждой проверки и распечатки свидетельства о правильности/неправильности соединения.
Устройство 210 для проверки соединения может дополнительно содержать средство индикации отказа приспособления, такое как световое, вибрационное или звуковое сигнальное устройство, для индикации того, что устройство 210 для проверки соединения необходимо заменить. В таком варианте осуществления устройство 210 для проверки соединения может, например, включать в себя запоминающее устройство или микроконтроллер, запрограммированный на предварительно определенное количество операций применения, таким образом, что если устройство 210 для проверки соединения будет использовано большее количество раз, чем предварительно определенное, произойдет активация средства индикации отказа приспособления (т.е. включится световое устройство, начнет вибрировать вибрационное устройство, или звуковое сигнальное устройство выдаст звуковой сигнал). Микроконтроллер может также подсчитывать количество случаев использования устройства 210 для проверки соединения, и производить расчет по заложенной методике расчет оставшегося срока службы и коэффициента безопасности, непрерывно определяя остаточный срок службы устройства для проверки соединения.
Как и в способе, описанном выше для устройства 10 для проверки соединения, чтобы проверить, правильно ли соединено гидравлическое соединение 160, устройство 210 для проверки соединения сначала устанавливают вокруг конца 120 через проем 211. Затем устройство 210 для проверки соединения сдвигают вниз по концу 120 трубы в осевом направлении AD1 до тех пор, пока оно не встанет в зацепленное положение. Устройство 210 для проверки соединения сдвигают вниз по концу 120 трубы в осевом направлении AD1 до положения, в котором зонд 292, в частности, контактная кромка 296, входит в контакт с пружинным стопорным кольцом 150 или поверхностью 128 заплечика. Пользователь прикладывает усилие к верхней поверхности 222 или устройству 210 для проверки соединения, равное или превышающее предварительно определенное граничное значение, определяемое датчиками 270A-C. Если передняя кромка 296 находится в контакте с одним или более выступами, приложенная пользователем сила создает усилие, действующее на зонд 292 (т.е. на один или более участков 292A-H), которое обнаруживается одним или более датчиками 272, расположенными по окружности в местах расположения одного или более выступов. Датчик, обнаруживающий усилие, действующее со стороны выступа на зонд 292, будет показывать усилие, более высокое, чем величина усилия на соседних или других датчиках, что указывает на то, что выступ присутствует, и что этот выступ правильно защелкнулся через заплечик 127. В некоторых вариантах осуществления, если датчики 270 обнаруживают, что по меньшей мере два выступа правильно защелкнуты через заплечик 127, это указывает на то, что гидравлическое соединение 160 соединено правильно.
Точнее, зонд 292 скользит между обращенной наружу поверхностью 130 и обращенной внутрь поверхностью 144, чтобы войти в контакт с одним или более выступами 150A-C пружинного стопорного кольца 150. Если на гидравлическом соединителе 140 не имеется пружинного стопорного кольца 150, контактная кромка 296 продолжит спускаться вниз до поверхности 128 заплечика. В таком случае прикладываемое пользователем усилие создаст усилие, действующее на зонд 292; однако, действующее на зонд 292 усилие будет равномерно распределено по передней кромке 296. При этом все датчики 272A-L будут показывать одинаковое значение усилия, что указывает на отсутствие выступа, т.е. на то, что пружинное стопорное кольцо 150 либо не соединено, либо неправильно соединено с гидравлическим соединением 160. Датчики 272 обнаруживают градиент давления или изменение усилия по окружности зонда 292, а схема 260 и/или микроконтроллер и/или компьютер по данному градиенту давления определяют, присутствуют ли один или более выступов, и, если они присутствуют, это означает, что конец 120 трубы правильно соединен с гидравлическим соединителем 140.
На фиг. 16A показано устройство 310 для проверки соединения, соединенное с тактильным устройством 500, вид спереди в перспективе. На фиг. 16B показано устройство 310 для проверки соединения и тактильное устройство 500, вид сзади в перспективе. На фиг. 17A показано устройство 310 для проверки соединения, вид снизу в перспективе. На фиг. 17B показано устройство 310 для проверки соединения, вид сверху в перспективе. На фиг. 18A показано устройство 310 для проверки соединения в разобранном состоянии, вид сверху в перспективе. На фиг. 18B показано устройство 310 для проверки соединения в разобранном состоянии, вид снизу в перспективе. Относительно фиг. 16А-18В необходимо отметить следующее. Устройство 310 для проверки соединения в целом содержит крышку 320, крышку 340, схему или печатную плату 360, башмак 380 и проем 311. Когда устройство 310 для проверки соединения находится в полностью собранном состоянии, крышка 320, корпус 340, схема 360 и башмак 380 соединены друг с другом без возможности вращения. Относительно фиг. 16A-18B необходимо отметить следующее.
Крышка 320 содержит верхнюю поверхность 322, нижнюю поверхность 324, обращенную радиально внутрь поверхность 326, обращенную радиально наружу поверхность 328 и проем 321. Как правило, крышка 320 имеет цилиндрическую форму, однако, следует иметь в виду, что крышка 320 может иметь любую геометрическую форму, пригодную для сопряжения с корпусом 340, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Обращенная радиально внутрь поверхность 326, по существу, концентрична обращенной радиально наружу поверхности 328. Обращенная радиально внутрь поверхность 326 образует проем 321, как показано на чертежах. В некоторых вариантах осуществления крышка 330 прикреплена к корпусу 340 одним или более болтами. В некоторых вариантах осуществления крышка 320 прикреплена к корпусу 340 с помощью посадки с натягом или прессовой посадки между компонентами. В некоторых вариантах осуществления крышка 320 прикреплена к корпусу 340 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей и т.д. Крышка 320 дополнительно содержит отверстие 330, функционально предназначенное для прокладки кабеля 502, проходящего через порт 374 и соединяемого с ним, как будет более подробно объяснено далее.
Корпус 340 содержит верхнюю поверхность 342, нижнюю поверхность 344, обращенную радиально внутрь поверхность 346, обращенную радиально наружу поверхность 348 и проем 341. Как правило, корпус 340 имеет цилиндрическую форму, однако, следует иметь в виду, что корпус 340 может иметь любую геометрическую форму, пригодную для сопряжения с крышкой 320 и башмаком 380, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Корпус 340 содержит также вставляемую часть 350, соединенную с нижней поверхностью 344 и отходящую от неё. Обращенная радиально внутрь поверхность 346, по существу, концентрична обращенной радиально наружу поверхности 348. Обращенная радиально внутрь поверхность 346 образует проем 341, как показано на чертежах. Вставляемая часть 350 выполнена с возможностью взаимодействия с башмаком 380. В частности, вставляемая часть 350 взаимодействует с отверстием 391 в башмаке 380. В некоторых вариантах осуществления корпус 340 прикреплен к башмаку 380 с помощью посадки с натягом или прессовой посадки между вставляемой частью 350 и отверстием 391. В некоторых вариантах осуществления корпус 340 прикреплен к башмаку 380 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. Следует отметить, что в некоторых вариантах осуществления корпус 340 может не содержать вставляемой части 350 и может быть прикреплен к верхней поверхности 382. Когда корпус 340 прикреплен к башмаку 380, нижняя поверхность 344 примыкает к верхней поверхности 382 или расположена, по существу, рядом с ней.
На фиг. 19A показан башмак 380, вид сверху в перспективе. На фиг. 19B показан башмак 380, вид снизу в перспективе. Относительно фиг. 16A-19B необходимо отметить следующее. Башмак 380 содержит верхнюю поверхность 382, нижнюю поверхность 384, обращенную радиально внутрь поверхность 386, обращенную радиально наружу поверхность 388 и проем 381. Как правило, башмак 380 имеет цилиндрическую форму, однако, следует иметь в виду, что башмак 380 может иметь любую геометрическую форму, пригодную для сопряжения с корпусом 340 и схемой 360, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. Обращенная радиально внутрь поверхность 386, по существу, концентрична обращенной радиально наружу поверхности 388. Башмак 380 дополнительно содержит отверстие 391, проходящее от верхней поверхности 382 до поверхности 393. Как было указано выше, отверстие 391 предназначено для вхождения в него вставляемой части 350 так, чтобы нижняя поверхность 344 примыкала к верхней поверхности 382 или была расположена, по существу, рядом с ней, а нижняя поверхность 352 примыкала к поверхности 393 или располагалась, по существу, рядом с ней. В отверстии 391 установлена схема 360. В некоторых вариантах осуществления схема 360 прикреплена к башмаку 380 с помощью посадки с натягом или прессовой посадки между обращенной радиально наружу поверхностью 368 и отверстием 391 (т.е. обращенной радиально внутрь поверхностью 386). В некоторых вариантах осуществления схема 360 фиксируется в башмаке 380 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. Башмак 380 дополнительно содержит зонд 392, соединенный с поверхностью 393 и отходящий от неё. Зонд 392 содержит обращенную радиально внутрь поверхность 394 и контактную кромку 396. Контактная кромка 396 предназначена для взаимодействия с пружинным стопорным кольцом гидравлического соединения, чтобы определить, правильно ли соединено гидравлическое соединение, как было описано выше при рассмотрении фиг. 7-10. В рассматриваемом варианте осуществления зонд 392 содержит один или более участков, а именно, участков 392A-H, отделенных друг от друга одной или более прорезями 402. В некоторых вариантах осуществления зонд 392 может быть отдельным компонентом, сформированным отдельно от башмака 380. Благодаря разделению зонда 392 на участки 392A-H с помощью прорезей 402 устройство 310 для проверки соединения может лучше изолировать расположение по окружности выступов пружинного стопорного кольца, поскольку на соседние датчики приходится меньшее усилие. Например, если участок 392C расположен поверх выступа 150B, участок 392C будет отклонять и включать только датчик, положение которого по окружности совпадает с положением участка 392C, но не датчики, положение которых по окружности совпадает с положением участков 392B или 392D. В некоторых вариантах осуществления башмак 380 либо может представлять собой единую деталь, либо может быть образован из нескольких компонентов. В некоторых вариантах осуществления башмак 380 может быть выполнен из металла или аналогичного проводящего материала. В некоторых вариантах осуществления на поверхности 398 дополнительно имеется одна или несколько опор 400. Опоры 400 расположены между поверхностью 393 и датчиками 372 схемы 360. В некоторых вариантах осуществления имеется одна опора на участок зонда 392, как показано на фиг. 19A. В некоторых вариантах осуществления башмак 380 дополнительно содержит выступ 390, отходящий от верхней поверхности 382. Выступ 390 входит в отверстие 356 корпуса 340 и отверстие 330 крышки 320, образуя канал для прохождения кабеля 502, соединяемого с портом 374.
В некоторых вариантах осуществления устройство 310 для проверки соединения дополнительно содержит элемент 376 предварительной нагрузки. Элемент 376 предварительной нагрузки расположен между поверхностью 393 башмака 380 и нижней поверхностью 364 схемы 360 и предназначен для создания предварительной нагрузки на датчики 372. В таком варианте осуществления предварительная нагрузка, прикладываемая к датчикам 372 элементом 376 предварительной нагрузки, обеспечивает, что датчики 372 постоянно находятся в активном состоянии. Любое изменение нагрузки на датчики 372 указывает на присутствие выступа пружинного стопорного кольца. В некоторых вариантах осуществления элемент 376 предварительной нагрузки выполнен из кремнийорганического каучука. В некоторых вариантах осуществления устройство 310 для проверки соединения дополнительно содержит прокладку 378, расположенную между элементом 376 предварительной нагрузки и поверхностью 393 башмака 380. В таких вариантах осуществления прокладка 378 работает совместно с элементом 376 предварительной нагрузки, создавая предварительную нагрузку на датчики 372.
В некоторых вариантах осуществления схема 360 вместо датчиков 372A-H содержит множество контактных площадок. В таком варианте осуществления опоры 400 или поверхность 393 будут контактировать непосредственно с контактными площадками, работая как отдельные переключатели. Башмак 380 может быть выполнен из металла или аналогичного проводящего материала, электрически соединенного с заземлением системы. Входные контактные площадки контролируются микроконтроллером и подтягиваются. Когда поверхность 393 или опоры 400 входят в контакт с входными контактными площадками, они создают короткое замыкание на землю, в результате чего входные контактные площадки оттягиваются ниже, что обнаруживается микроконтроллером (эффект срабатывания кромки).
В некоторых вариантах осуществления схема 360 выполнена гибкой и расположена на поверхности 393. В таком варианте осуществления один или более датчиков схемы 360 обнаруживают отклонение башмака 380, а именно, участков 392A-H. Когда отклонение зонда 392 в направлении по окружности становится равным заданному значению, это означает, что в данном месте присутствует выступ пружинного стопорного кольца.
На фиг. 20A показана схема 360, вид сверху в перспективе. На фиг. 20B показана схема 360, вид снизу в перспективе. На фиг. 21 показано устройство 310 для проверки соединения, вид в разрезе по плоскости 21-21 на фиг. 17B. Относительно фиг. 16A-21 необходимо отметить следующее.
В некоторых вариантах осуществления схема 360 представляет собой плату (например, печатную плату). Схема 360 содержит верхнюю поверхность 362, нижнюю поверхность 364, обращенную радиально внутрь поверхность 366, обращенную радиально наружу поверхность 368 и проем 361. Как правило, схема 360 имеет дисковидную или цилиндрическую форму, однако, следует иметь в виду, что схема 360 может иметь любую геометрическую форму, пригодную для размещения в башмаке 380 и/или для прикрепления к корпусу 340, например, квадратную, прямоугольную, овальную, эллиптическую или треугольную форму. В некоторых вариантах осуществления схема 360 прикреплена к корпусу 340 любыми подходящими для этого средствами, например, с помощью винтов, болтов, заклепок, адгезива и т.д. Обращенная радиально внутрь поверхность 366, по существу, концентрична обращенной радиально наружу поверхности 368. Обращенная радиально внутрь поверхность 366 образует проем 361, как показано на чертежах. Как было указано выше, схема 360 установлена внутри башмака 380, точнее, в отверстии 391, так, что нижняя поверхность 364 примыкает к поверхности 393 или расположена, по существу, рядом с ней. В некоторых вариантах осуществления схема 360 прикреплена к башмаку 380 с помощью посадки с натягом или прессовой посадки между обращенной радиально наружу поверхностью 368 и отверстием 393, а именно, обращенной радиально внутрь поверхностью 386. В некоторых вариантах осуществления схема 360 зафиксирована в башмаке 380 с помощью адгезива или другого подходящего способа соединения, например, с помощью заклепок, винтов, гвоздей, болтов и т.д. В некоторых вариантах осуществления схема 360 представляет собой печатную плату. Схема 360 содержит один или более датчиков 372, расположенных на нижней поверхности 364. Датчики 372 представляют собой входные датчики (группу входных датчиков), функционально предназначенных для обнаружения усилий, действующих на зонд 392, с целью определения наличия выступов пружинного стопорного кольца (иными словами, если будут обнаружены два выступа, это значит, что гидравлическое соединение соединено правильно). В рассматриваемом варианте осуществления схема содержит датчики 372A-H, расположенные по окружности на нижней поверхности 364. Датчики 372A-H будут обнаруживать усилия одинаковой величины, если зонд 392 прижимается к плоской поверхности (например, к поверхности заплечика конца трубы), указывая, таким образом, на то, что выступы отсутствуют (т.е. кольцо защелкнулось за заплечиком конца трубы), и что гидравлическое соединение соединено неправильно. Как было указано выше, к датчикам прикладывается предварительная нагрузка с помощью элемента 376 предварительной нагрузки. Когда обнаруживается дополнительное усилие, действующее на один или более датчиков 372A-H, по отношению к другим датчикам, это означает, что присутствует выступ. Например, если нагрузка на датчики 372A и 372E выше нагрузки на датчики 372B-D и датчики 372F-H, это указывает на то, что в местах расположения датчиков 372A и 372E присутствуют два выступа, и тактильное устройство 500 в этом случае указывает, что гидравлическое соединение соединено правильно. В некоторых вариантах осуществления в качестве датчиков 70A-C и 372 используются датчики ForceTouch™ или ForceGauge™ компании NextInput, Inc. Однако следует отметить, что в качестве датчиков 372 могут быть использованы любые датчики, пригодные для определения входного усилия от зонда 392.
В некоторых вариантах осуществления схема 360 дополнительно содержит оптический датчик. Например, схема 360 содержит оптический передатчик 370A и оптический приемник 370B. Оптический передатчик 370A генерирует оптический сигнал и кодирует подлежащую передаче информацию в виде генерируемого им света. Оптический передатчик 370A передает оптический сигнал (или луч света) на оптический приемник 370B (например, оптическую систему свободного пространства). Оптический передатчик 370A и приемник 370B выполняют функцию дополнительной защиты от отказа, а именно, для обеспечения того, чтобы устройство 310 для проверки соединения было правильно расположено вокруг конца трубы гидравлического соединения. Например, как показано на фиг. 7, когда устройство 310 для проверки соединения правильно расположено на гидравлическом соединении 160, линия прямой видимости между оптическим передатчиком 370A и оптическим приемником 370B нарушена, и оптический сигнал никогда не поступает в оптический приемник 370B. Это требование, которое будет учитываться тактильным устройством 500 при определении того, правильно ли соединено гидравлическое соединение. Например, если тактильное устройство 500 определяет, что присутствуют два выступа (т.е. два датчика 372 указывают на повышенную нагрузку относительно других датчиков), и линия прямой видимости между оптическим передатчиком 370A и оптическим приемником 370B нарушена (т.е. оптический приемник 370B не принимает оптический сигнал, передаваемый оптическим передатчиком 370A), тактильное устройство 500 указывает на проверенное соединение (например, с помощью вибрации, включением светового сигнала, активации звукового сигнала/сигнала тревоги). В некоторых вариантах осуществления корпус 340 содержит отверстия, выполненные непосредственно перед оптическим передатчиком 370A и оптическим приемником 370B, с установленными в них заполнителями/пробками (например, пластиковыми), предназначенными для обеспечения возможности передачи через них оптического сигнала.
В некоторых вариантах осуществления устройство 310 для проверки соединения соединено с тактильным устройством 500 посредством кабеля 502 и порта 374. Напряжение 310 на устройство для проверки соединения может подаваться по кабелям 502 и 504. Тактильное устройство 500 может содержать центральный процессор (ЦП). Тактильное устройство 500 может определять и указывать пользователю, правильно ли соединено гидравлическое соединение. Тактильное устройство 500 принимает один или более сигналов от схемы 360, а именно, указывающих, испытывает ли какой-либо из датчиков 272 повышенную нагрузку, и принимает ли оптический приемник 370B оптический сигнал, передаваемый оптическим передатчиком. В некоторых вариантах осуществления, если тактильное устройство 500 определяет, что два или более датчиков 372 испытывают повышенную нагрузку, и что оптический приемник 370B не получает оптический сигнал от оптического передатчика 370A, тактильное устройство 500 будет указывать, что гидравлическое соединение проверено. Тактильное устройство 500 может выдавать сигнал обратной связи (например, в виде вибрации, сигнального светового или звукового сигналов), чтобы информировать пользователя о том, проверено или не проверено гидравлическое соединение. Схема 360 может дополнительно содержать соединение 375 заземления.
Схема 360 представляет собой любую подходящую схему, способную указывать, когда датчики 372 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, указывая, таким образом, на правильность или неправильность гидравлического соединения. В некоторых вариантах осуществления схема 360 и/или тактильное устройство 500 содержит индикаторное устройство, такое как сигнальная лампа, которое включается, если датчики 372 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, и оптический сигнал не обнаруживается оптическим приемником 370B, указывая, таким образом, на правильное соединение. В некоторых вариантах осуществления схема 360 и/или тактильное устройство 500 содержит вибрационное устройство (например, вибрационный мотор), которое включается, создавая вибрацию устройства 310 для проверки соединения и/или тактильного устройства 500, если датчики 372 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, и оптический сигнал не обнаруживается оптическим приемником 370B, указывая, таким образом, на правильное соединение гидроразъема. Например, вибрационное устройство может представлять собой тактильное устройство 500, выполненное в виде мотора с эксцентриковым кулачком или пьезоэлектрического устройства, которое вибрирует в ответ на определенную форму волны. Пьезоэлектрическое устройство может также создавать звуковой выходной сигнал. В некоторых вариантах осуществления схема 360 и/или тактильное устройство 500 содержит звуковое сигнальное устройство (например, динамик и любое другое необходимое звуковое оборудование), который выдает звуковой сигнал, если датчики 372 обнаруживают соответствующее усилие в одном или более (например, двух) местах по окружности, и оптический сигнал не обнаруживается оптическим приемником 370B, указывая, таким образом, на правильное соединение. Схема 360 и/или тактильное устройство 500 может дополнительно содержать микроконтроллер, включающий в себя один или более ЦП с запоминающим устройством и программируемыми периферийными устройствами ввода-вывода. Как более подробно описано далее, микроконтроллер может быть использован для активации светового сигнала, вибрационного устройства или другого индикаторного устройства после проверки правильности соединения, для запуска с помощью устройства передачи данных передачи сигнала на дистанционно расположенное принимающее устройство, указывающее на правильность (или неправильность) соединения, и активации средства индикации отказа приспособления.
Устройство 310 для проверки соединения может также дополнительно содержать устройство передачи данных, электрически соединенное со схемой 360 и, при необходимости, с запоминающим устройством или микроконтроллером. Устройство передачи данных предназначено для передачи на дистанционно расположенное устройство сигнала, указывающего на правильность или неправильность гидравлического соединения. В некоторых вариантах осуществления устройство передачи данных выполнено с возможностью передачи сигнала по электрическому кабелю, такому как волоконно-оптический кабель (т.е. посредством соединения в физической форме). В устройстве передачи данных может использоваться связь интегральных схем (I2C), локальная сеть контроллеров (CAN), коммутируемая локальная сеть (LIN), или любой другой известный подходящий протокол связи. В некоторых вариантах осуществления устройство передачи данных предназначено для беспроводной передачи дистанционно расположенному принимающему устройству данных (т.е. сигнала о правильном или неправильном соединении гидроразъема), которые оно регистрирует. Устройство передачи данных может осуществлять передачу данных с помощью любого подходящего способа, известного в данной области техники, например, с помощью связи Bluetooth®, радиочастотной, инфракрасной связи, или связи Wi-Fi®. В некоторых вариантах осуществления устройство передачи данных может передавать идентификационный номер гидравлического соединения, идентификационный номер устройства для проверки соединения, остаточный ресурс устройства для проверки соединения, идентификационный номер транспортного средства (VIN), номер компонента (например, двигателя, радиатора и т.д.), а также серийный номер данного компонента, подтверждение правильности гидравлического соединения или указание на неправильное гидравлическое соединение. В некоторых вариантах осуществления устройство для проверки 310 соединения может работать совместно с другим устройством, таким как компьютер, с целью регистрации в электронном виде результатов каждой проверки и распечатки свидетельства о правильности/неправильности соединения.
Устройство 310 для проверки соединения может дополнительно содержать средство индикации отказа приспособления, такое как световое, вибрационное или звуковое сигнальное устройство, для индикации того, что устройство 310 для проверки соединения необходимо заменить. В таком варианте осуществления устройство 310 для проверки соединения может, например, включать в себя запоминающее устройство или микроконтроллер, запрограммированный на определенное количество операций применения так, что если устройство 310 для проверки соединения будет использовано большее количество раз, чем заранее определенное, произойдет активация средства индикации отказа приспособления (т.е. включится световое устройство, начнет вибрировать вибрационное устройство, или звуковое сигнальное устройство выдаст звуковой сигнал). Микроконтроллер может также подсчитывать количество случаев использования устройства 210 для проверки соединения, и производить расчет по заложенной методике расчет оставшегося срока службы и коэффициента безопасности, непрерывно определяя остаточный срок службы устройства для проверки соединения.
Как и в способе, описанном выше для устройства 10 и 210 для проверки соединения, чтобы проверить правильность гидравлического соединения 160, устройство 310 для проверки соединения сначала устанавливают вокруг конца 120 трубы, таким образом, чтобы конец 120 располагался в проеме 311. Затем устройство 310 для проверки соединения сдвигают вниз по концу 120 трубы в осевом направлении AD1 до тех пор, пока он не встанет в положение зацепления. Устройство 310 для проверки соединения сдвигают вниз по концу 120 трубы в осевом направлении AD1 до положения, в котором зонд 392, в частности, контактная кромка 396, входит в контакт с пружинным стопорным кольцом 150 или поверхностью 128 заплечика. Пользователь прикладывает усилие к верхней поверхности 322 или устройству 310 для проверки соединения, равное или превышающее предварительно определенное граничное значение. Если передняя кромка 396 находится в контакте с одним или более выступами, приложенная пользователем сила создает усилие, действующее на зонд 392 (т.е. на один или более участков 392A-H), которое обнаруживается одним или более датчиками 372, расположенными по окружности в местах расположения одного или более выступов. Датчик, обнаруживающий усилие, действующее со стороны выступа на зонд 392, будет показывать усилие, более высокое, чем величина усилия на соседних или других датчиках, что указывает на то, что выступ присутствует, и что этот выступ правильно защелкнулся через заплечик 127. В некоторых вариантах осуществления, если датчики 372 обнаруживают, что по меньшей мере два выступа правильно защелкнуты над заплечиком 127, это указывает на то, что гидравлическое соединение 160 соединено правильно.
Точнее, зонд 392 спускается вниз между обращенной радиально наружу поверхностью 130 и обращенной радиально внутрь поверхностью 144, чтобы войти в контакт с одним или более выступами 150A-C пружинного стопорного кольца 150. Если на гидравлическом соединителе 140 не имеется пружинного стопорного кольца 150, контактная кромка 396 продолжит спускаться вниз до поверхности 128 заплечика. В таком случае прикладываемое пользователем усилие создаст усилие, действующее на зонд 392; однако, действующее на зонд 392 усилие будет равномерно распределено по контактной кромке 396. При этом все датчики 372A-H будут показывать одинаковое значение усилия, что указывает на отсутствие выступа, т.е. на то, что пружинное стопорное кольцо 150 либо не соединено, либо неправильно соединено с гидравлическим соединением 160. Датчики 372 обнаруживают градиент давления или изменение усилия по окружности зонда 392, а схема 360 и/или микроконтроллер и/или компьютер по данному градиенту давления определяют, присутствуют ли один или более выступов, и, если они присутствуют, это означает, что конец 120 трубы правильно соединен с гидравлическим соединением 140.
Следует иметь в виду, что различные аспекты вышеописанного изобретения, а также другие его особенности, функции и альтернативные решения при необходимости могут применяться в комбинации друг с другом во многих других системах или приложениях. Специалистами в данной области могут быть сделаны и другие неожиданные или непредвиденные изменения, модификации, а также применены альтернативные конструктивные решения, которые также охватываются пунктами формулы изобретения.
Ссылочные обозначения
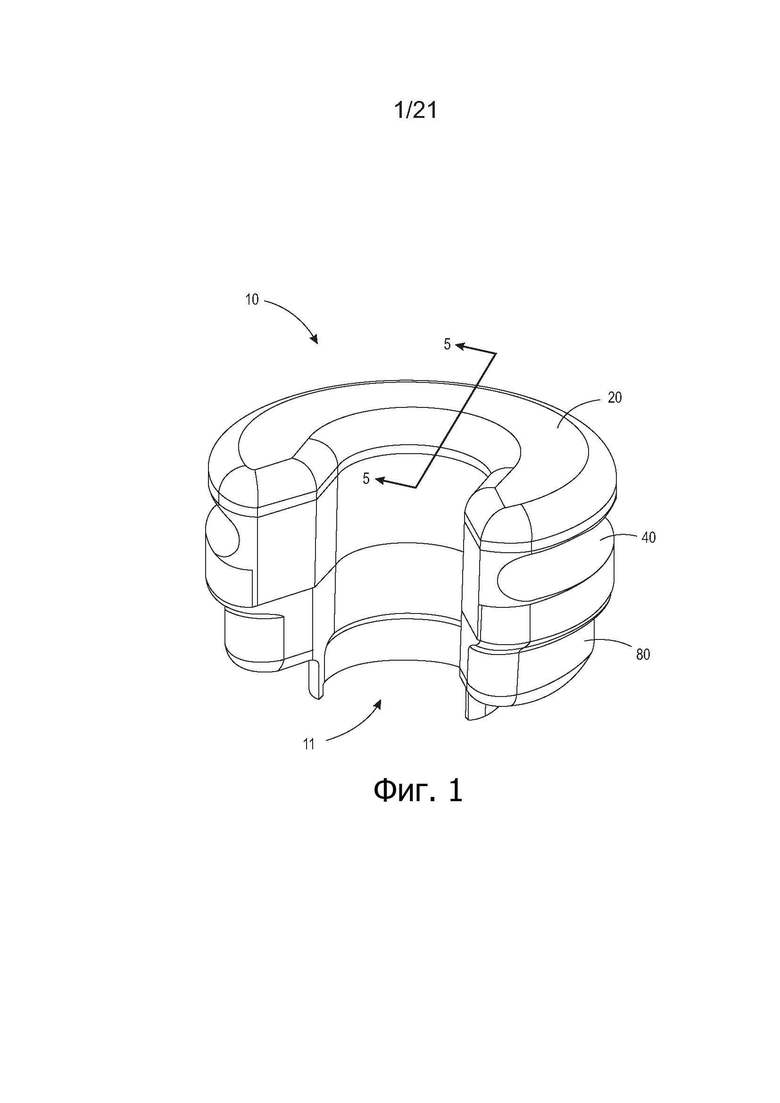
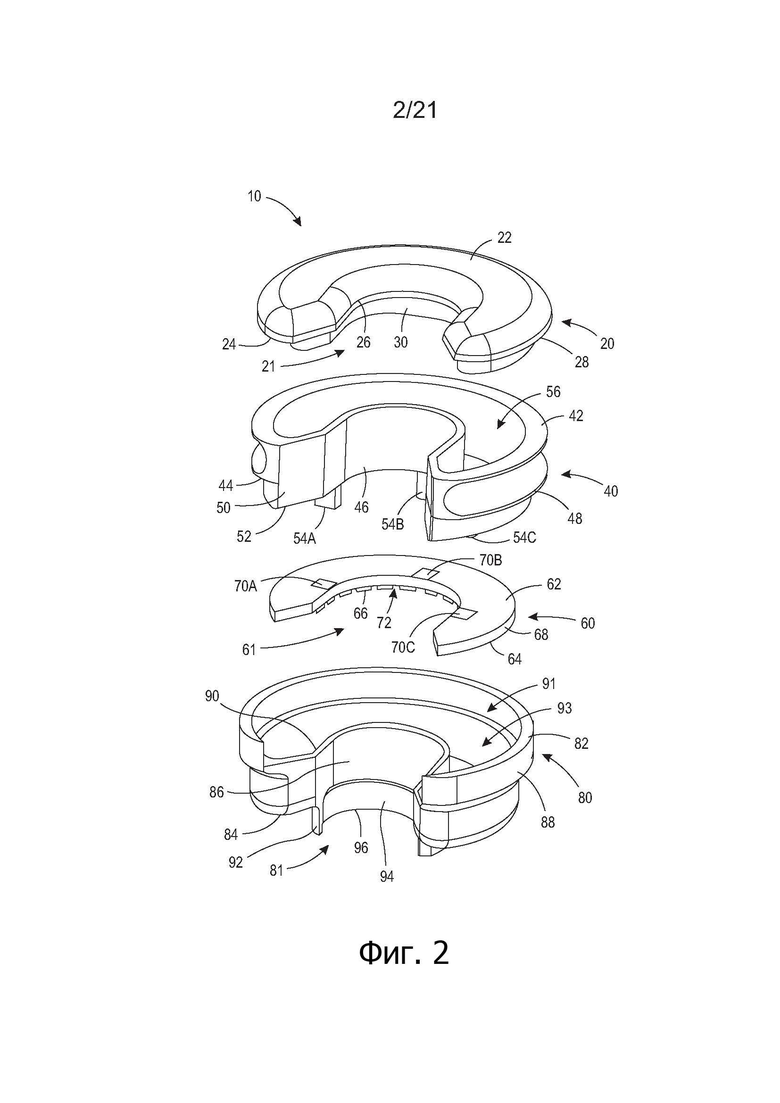
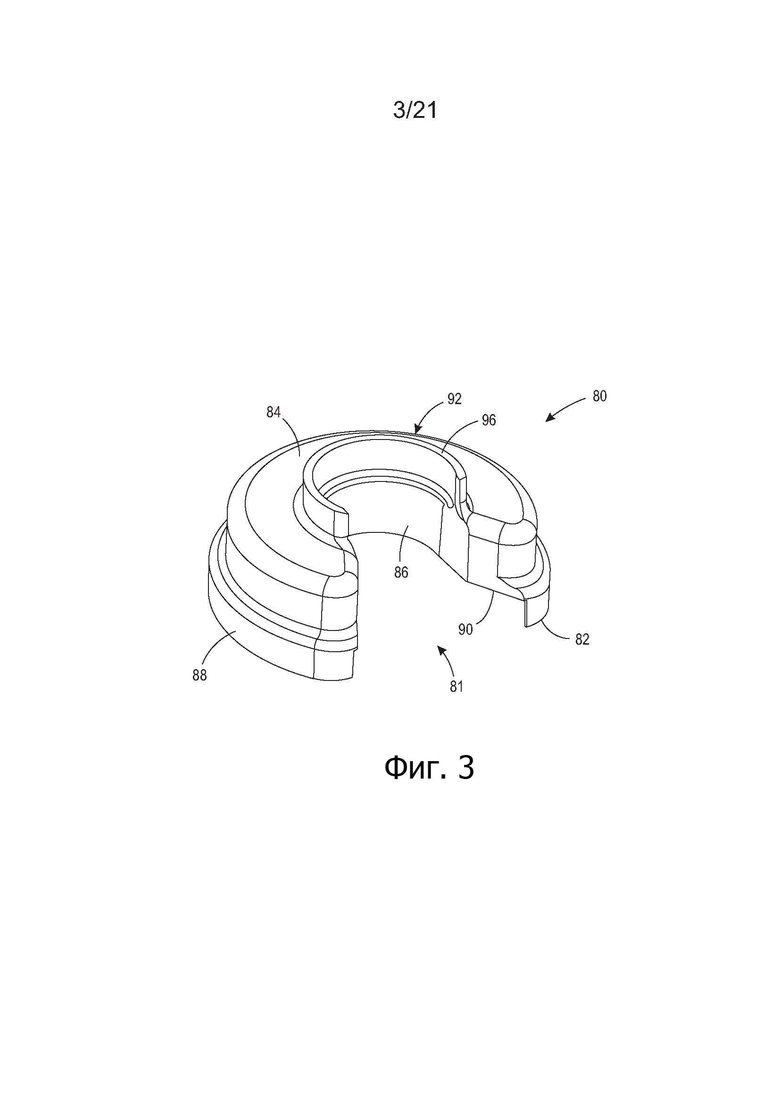
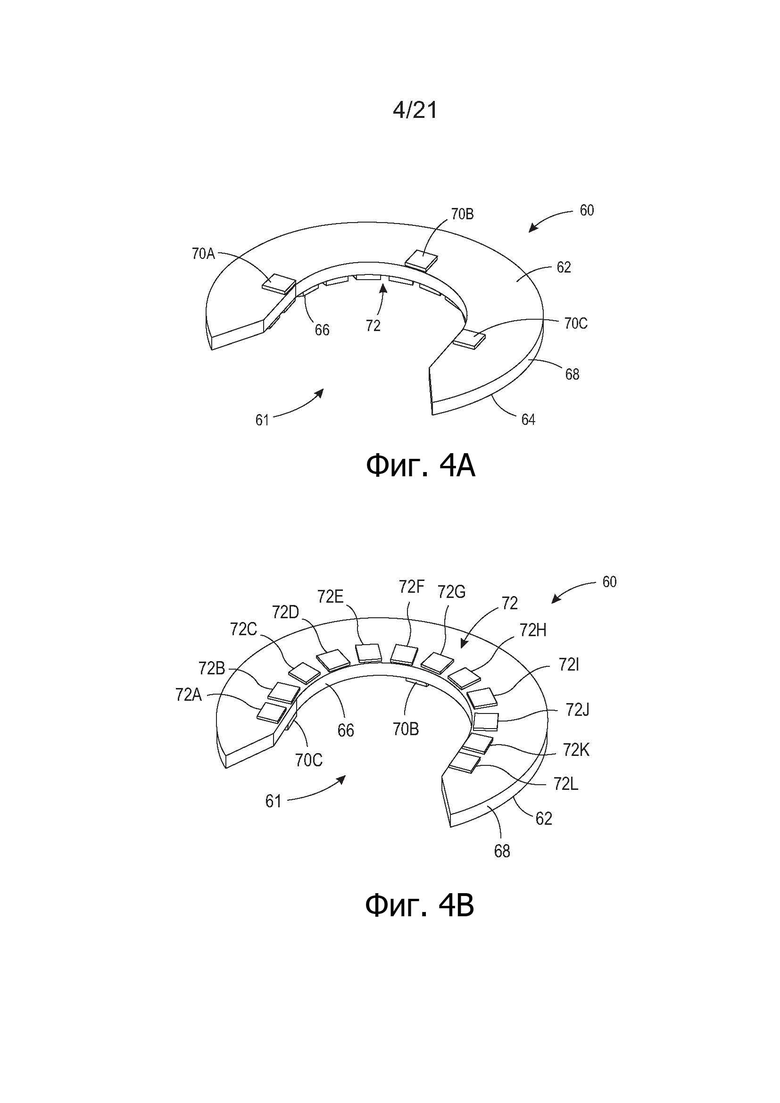
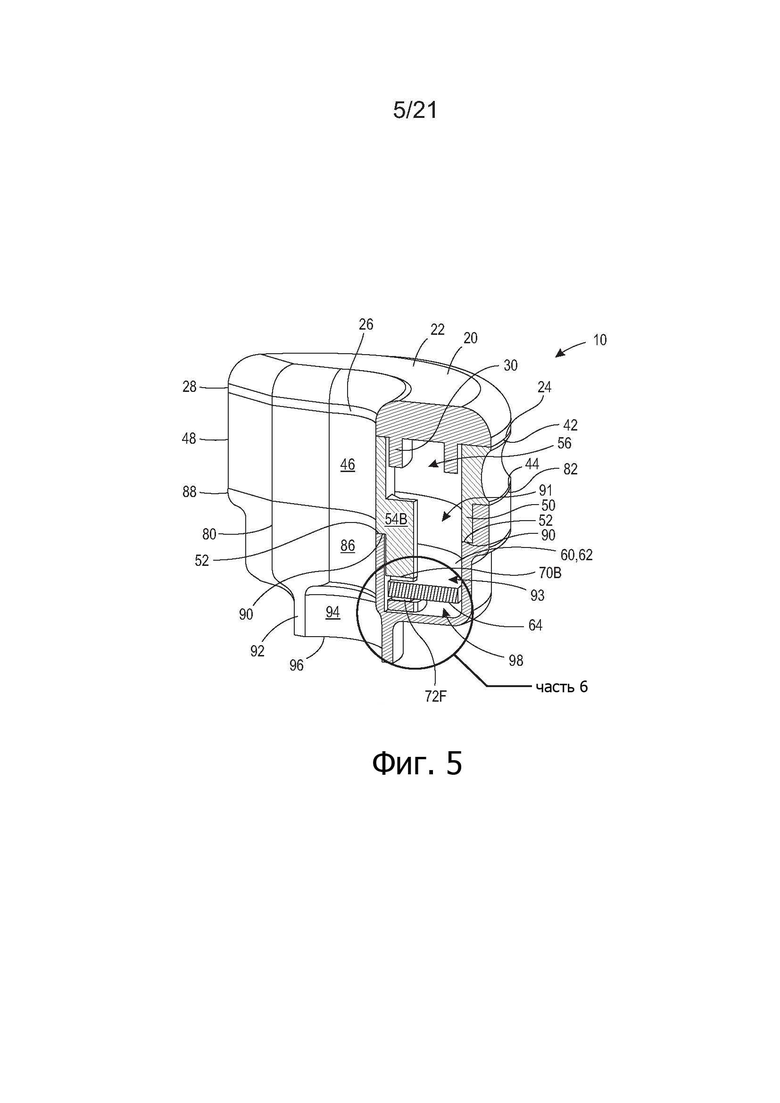
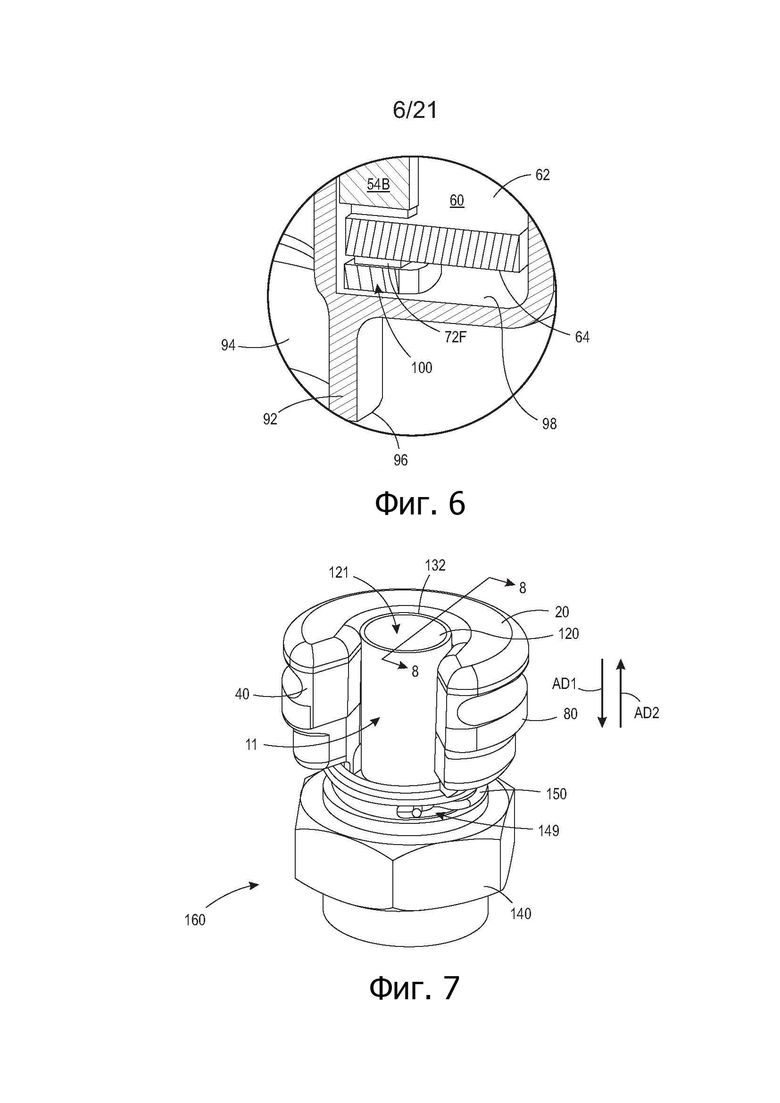
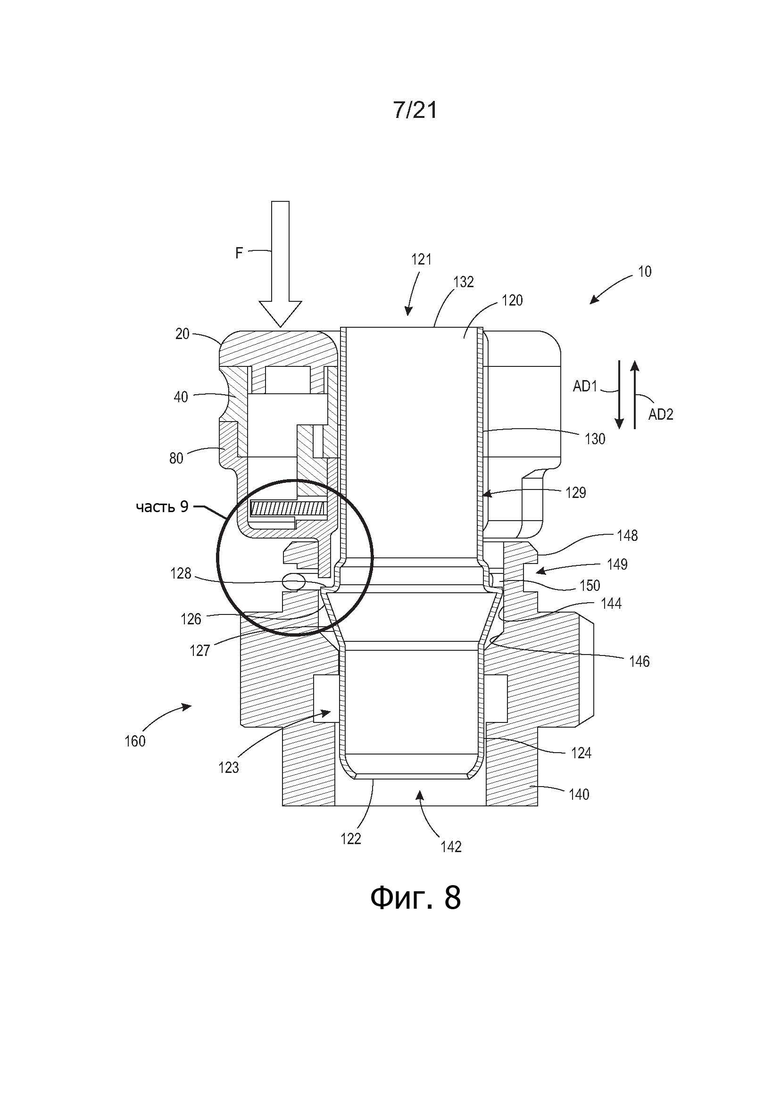
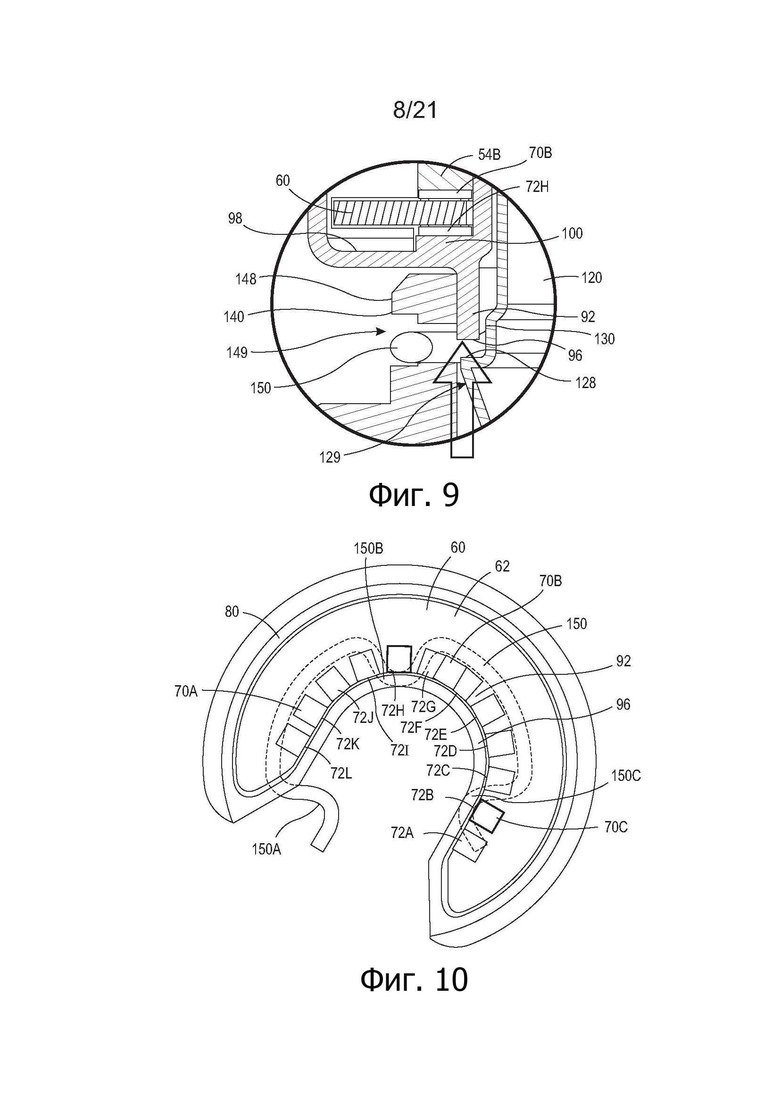
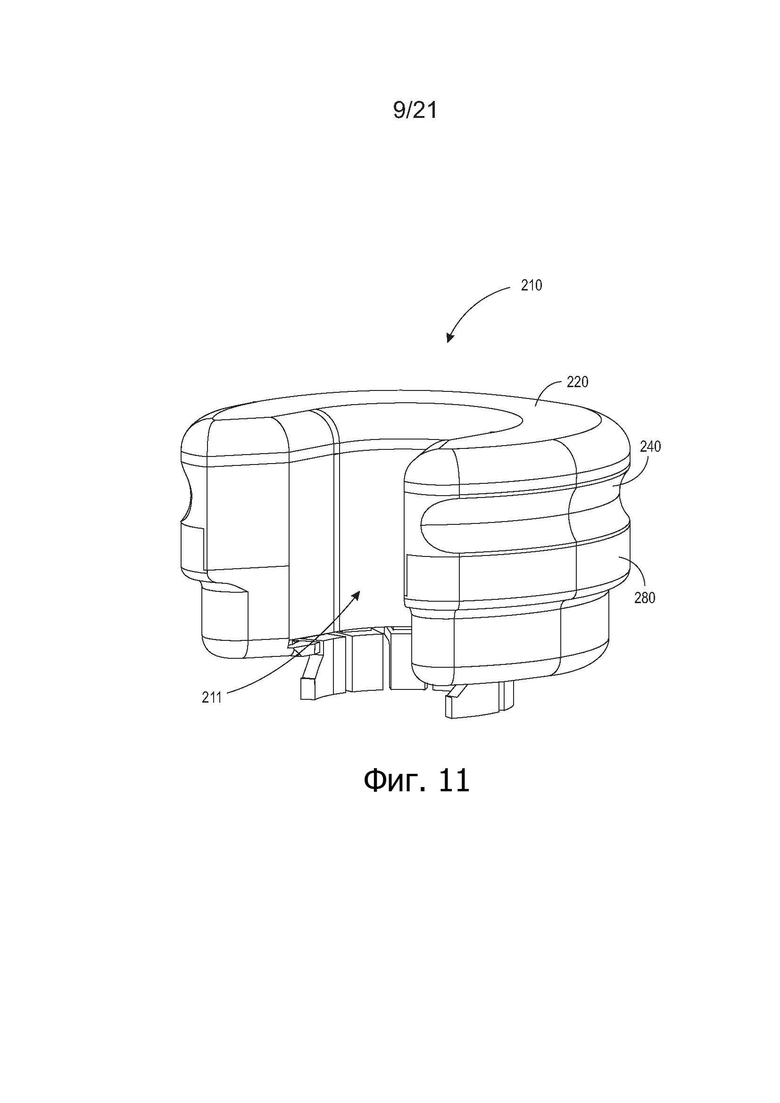
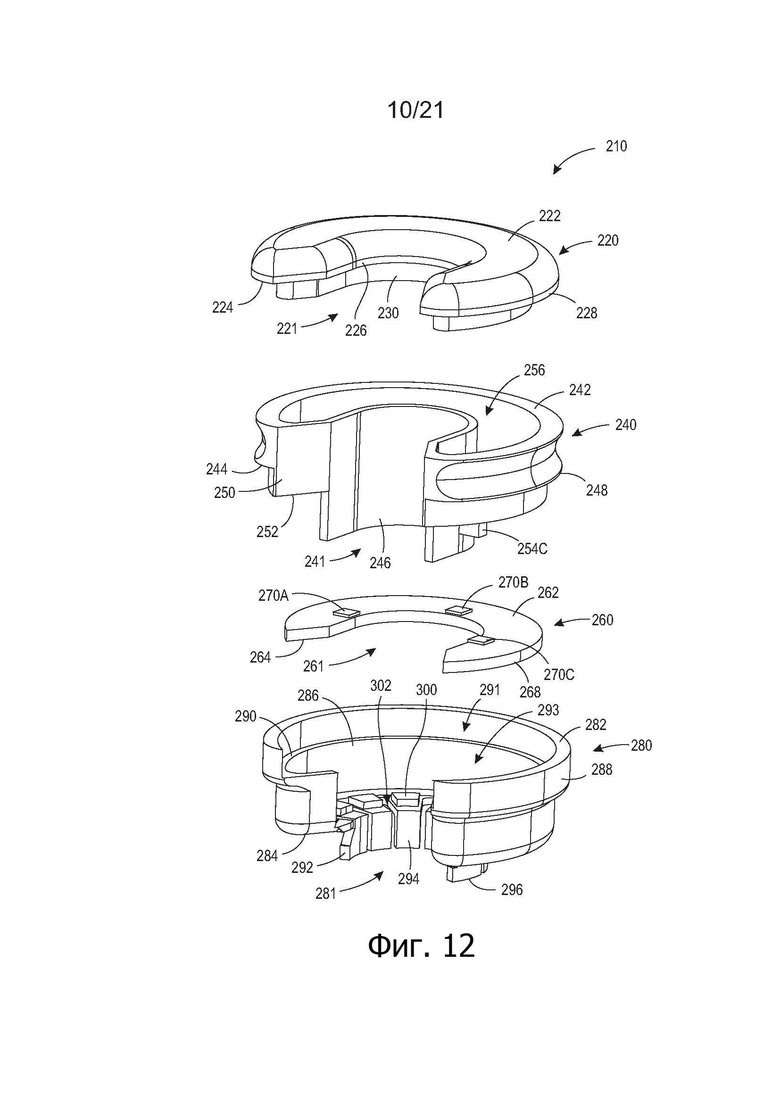
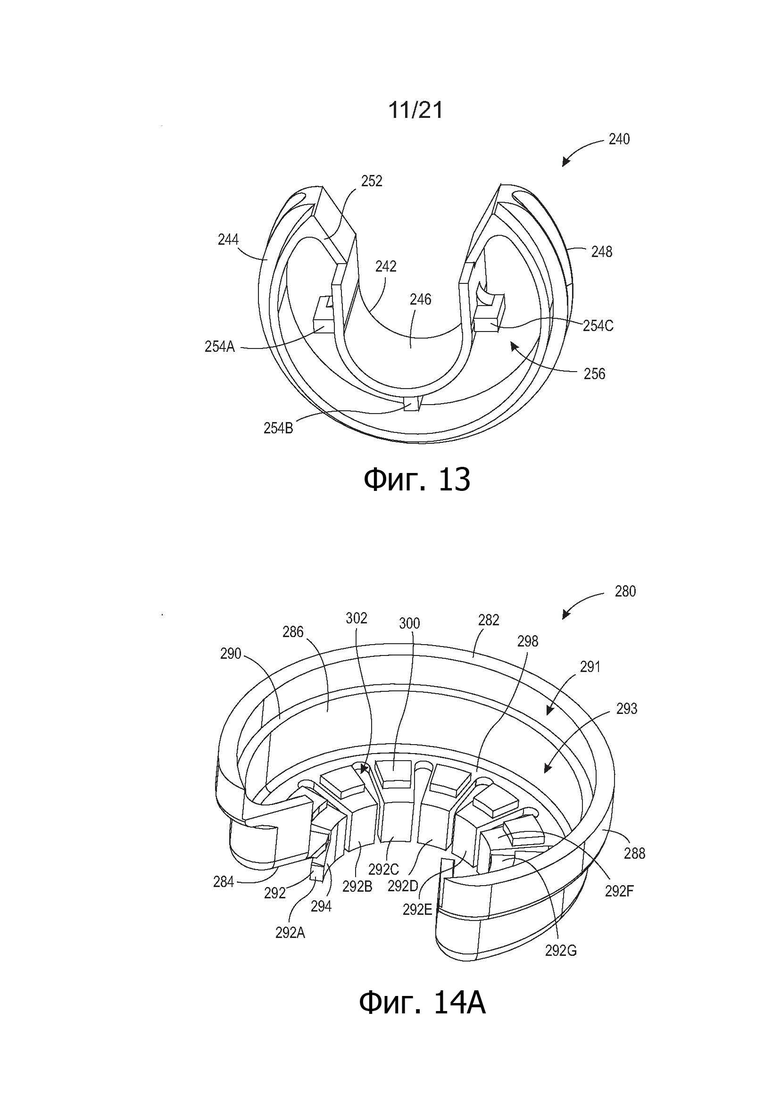
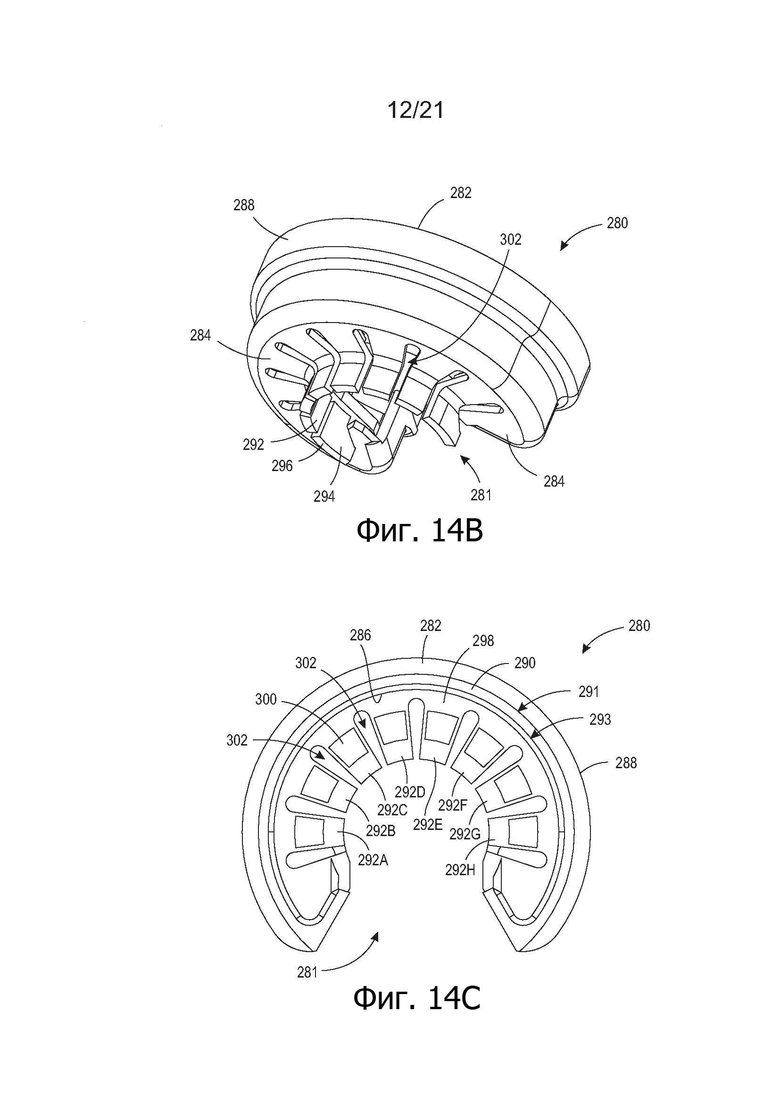
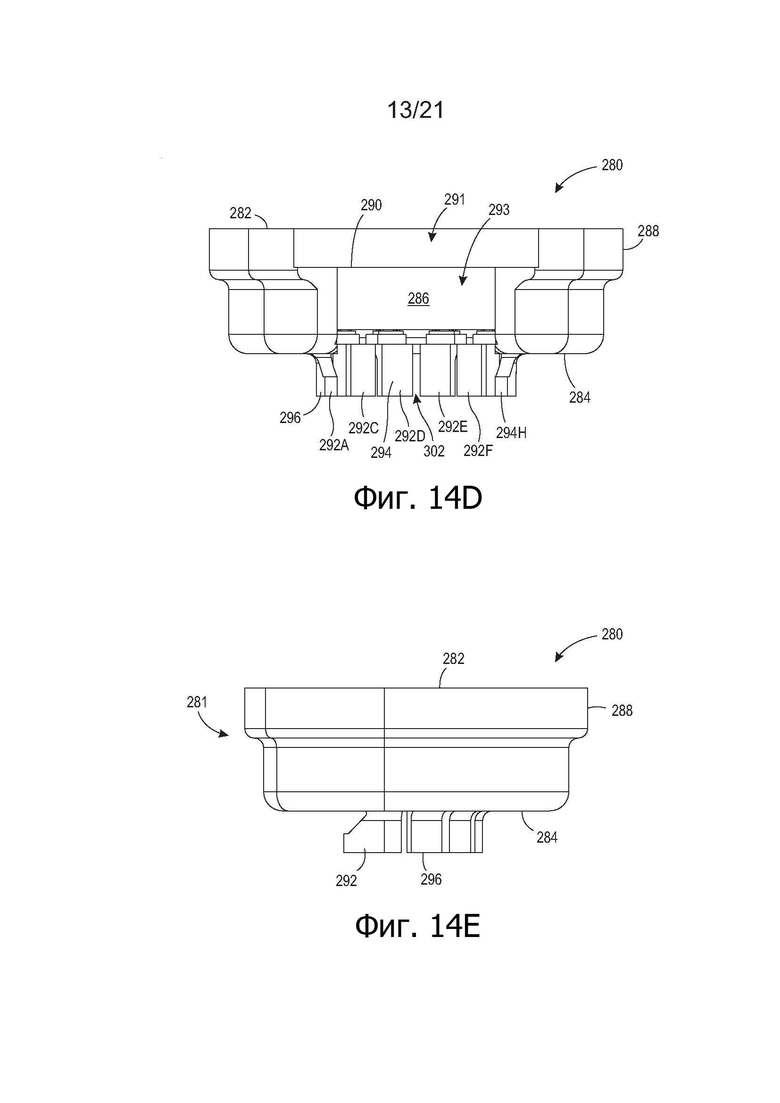
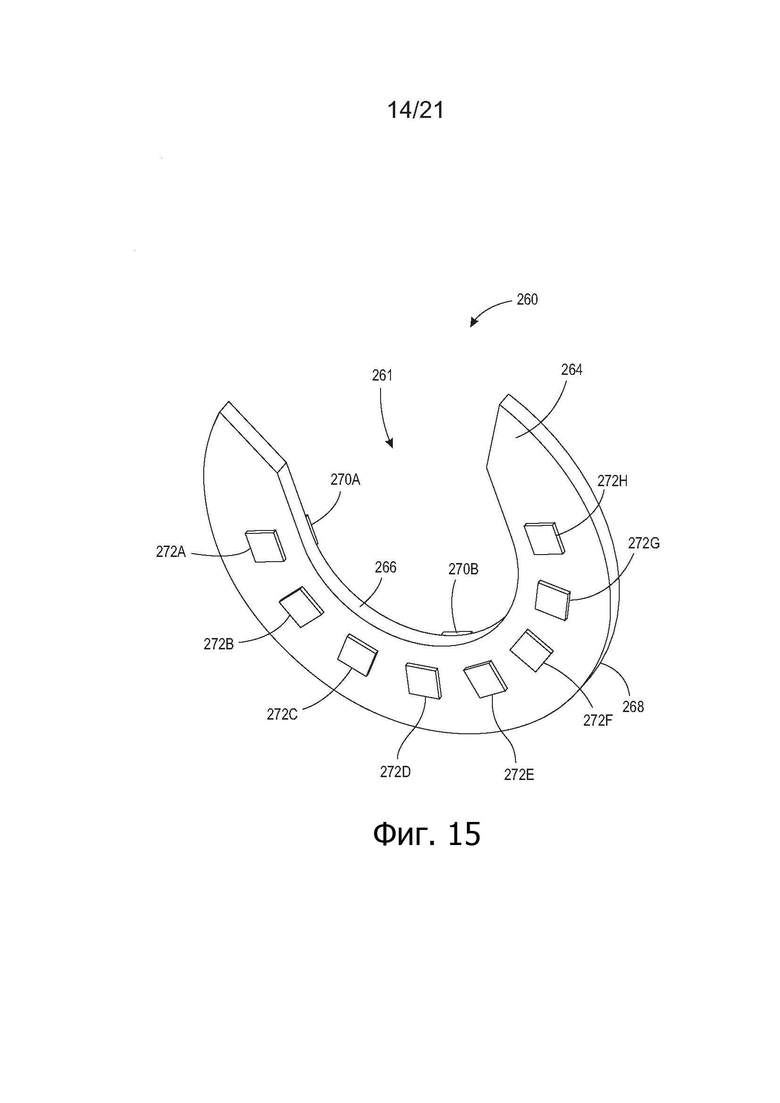
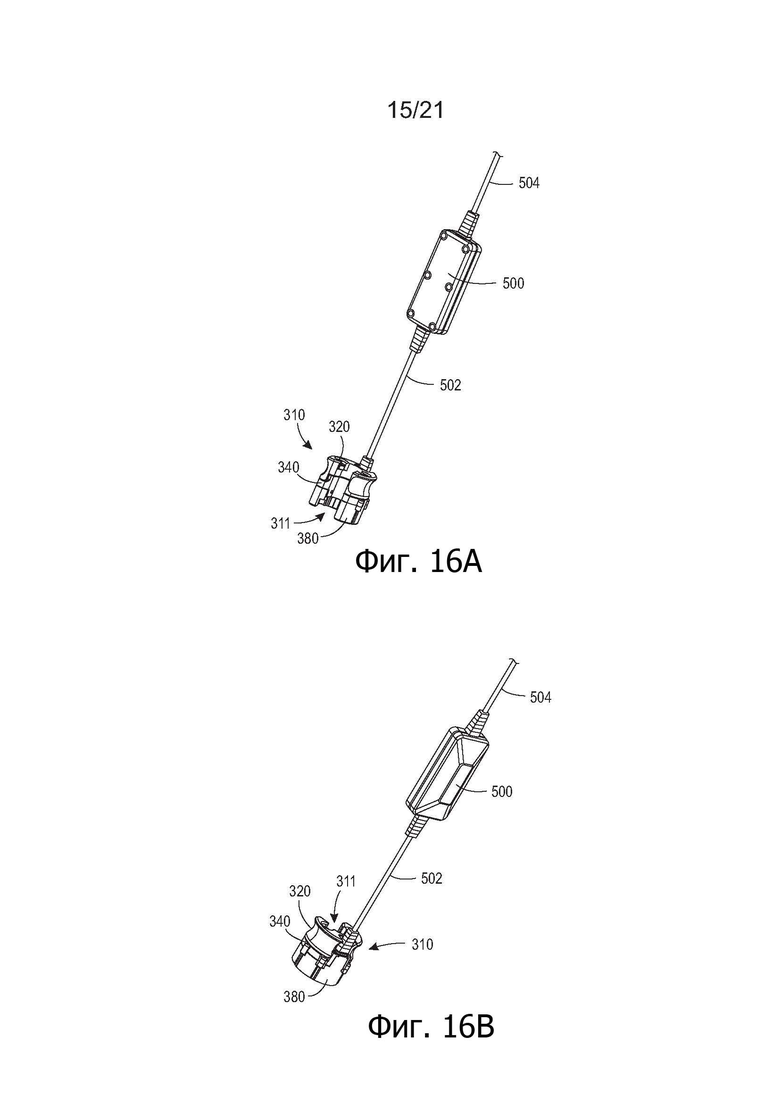
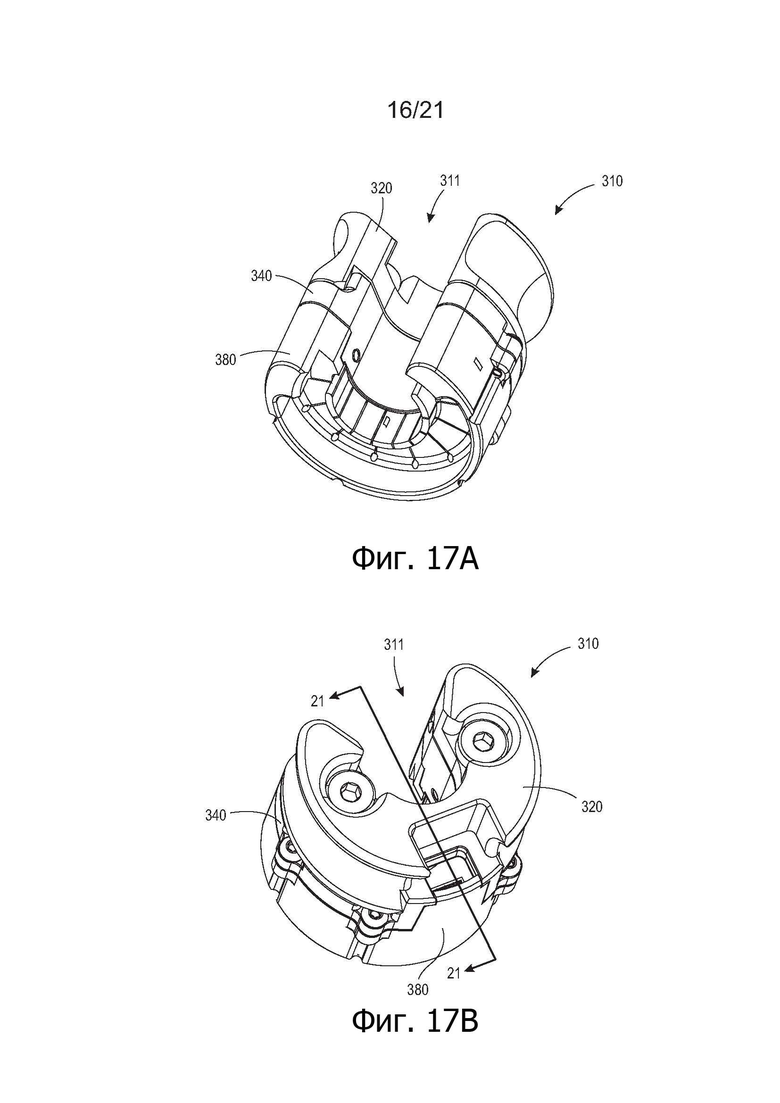
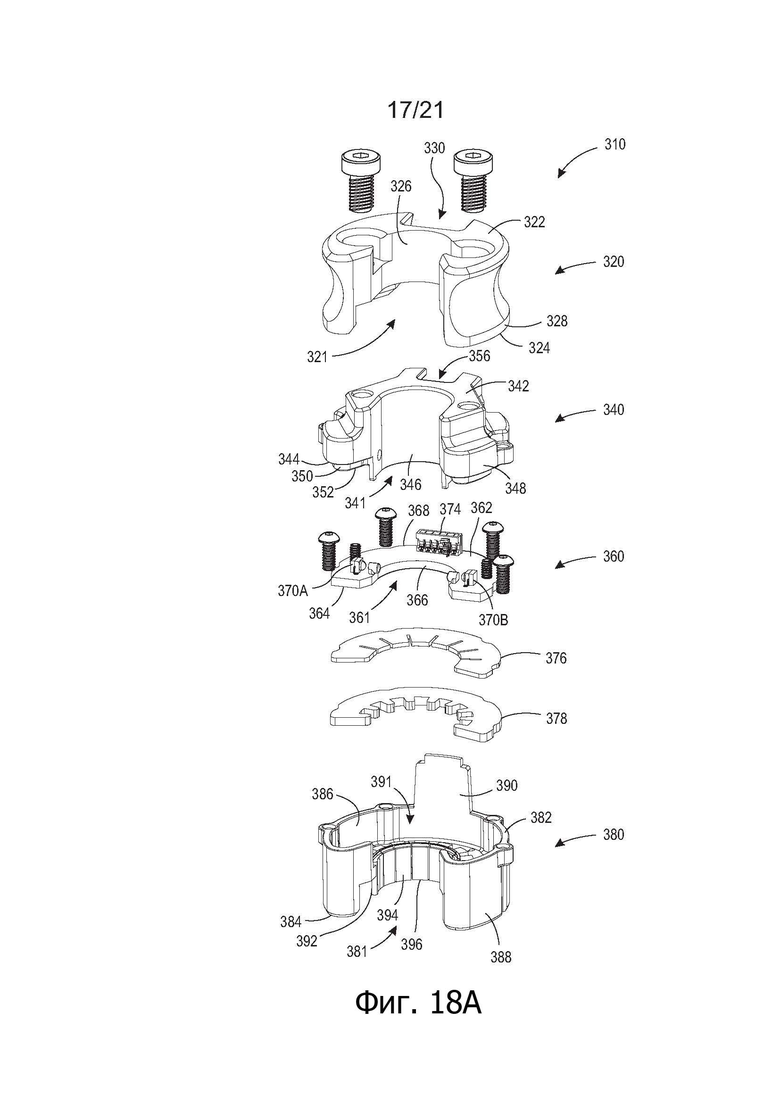
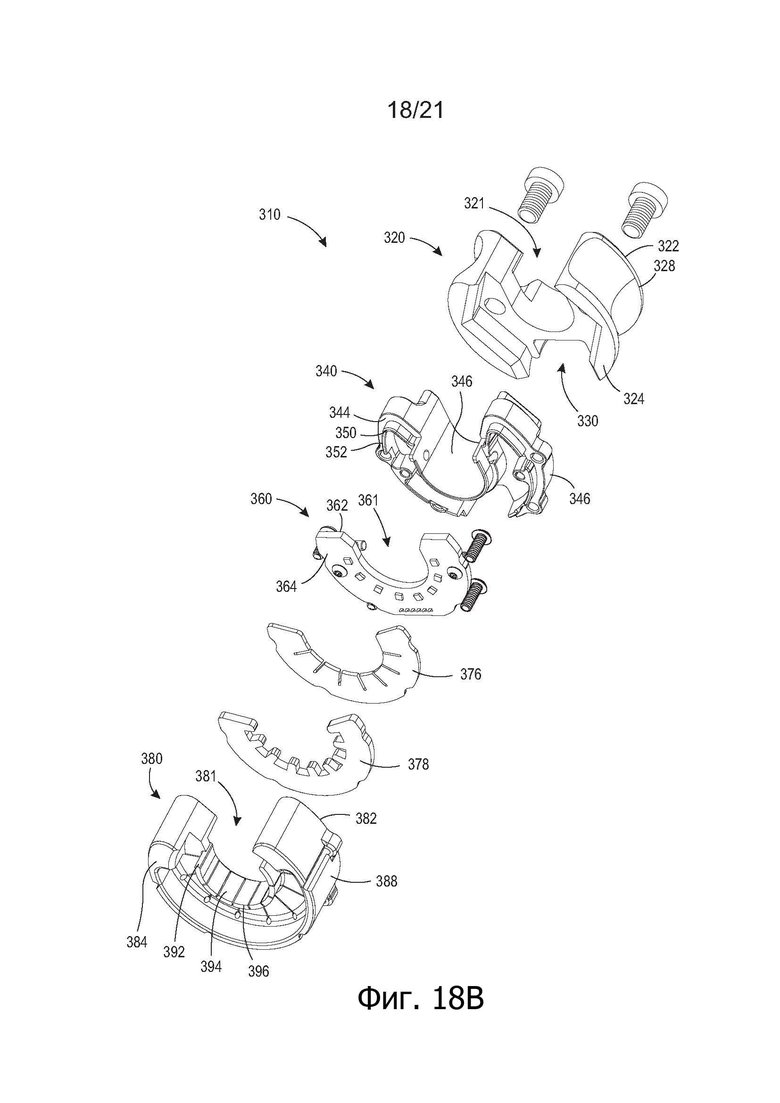
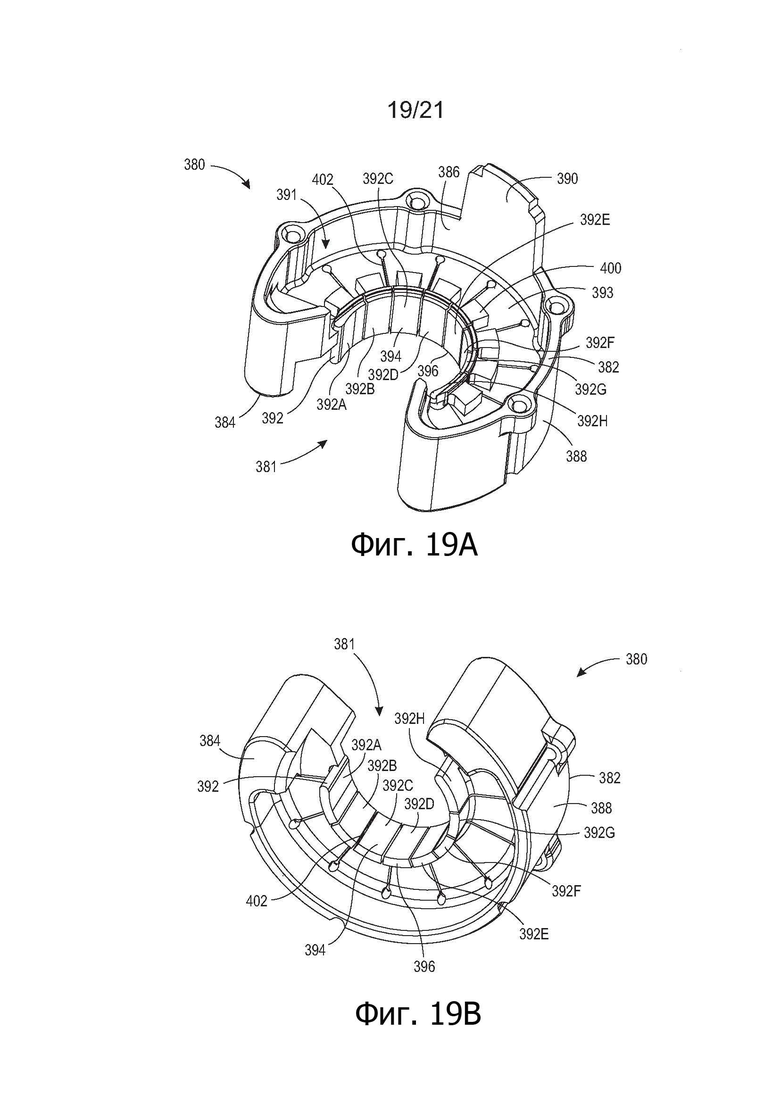
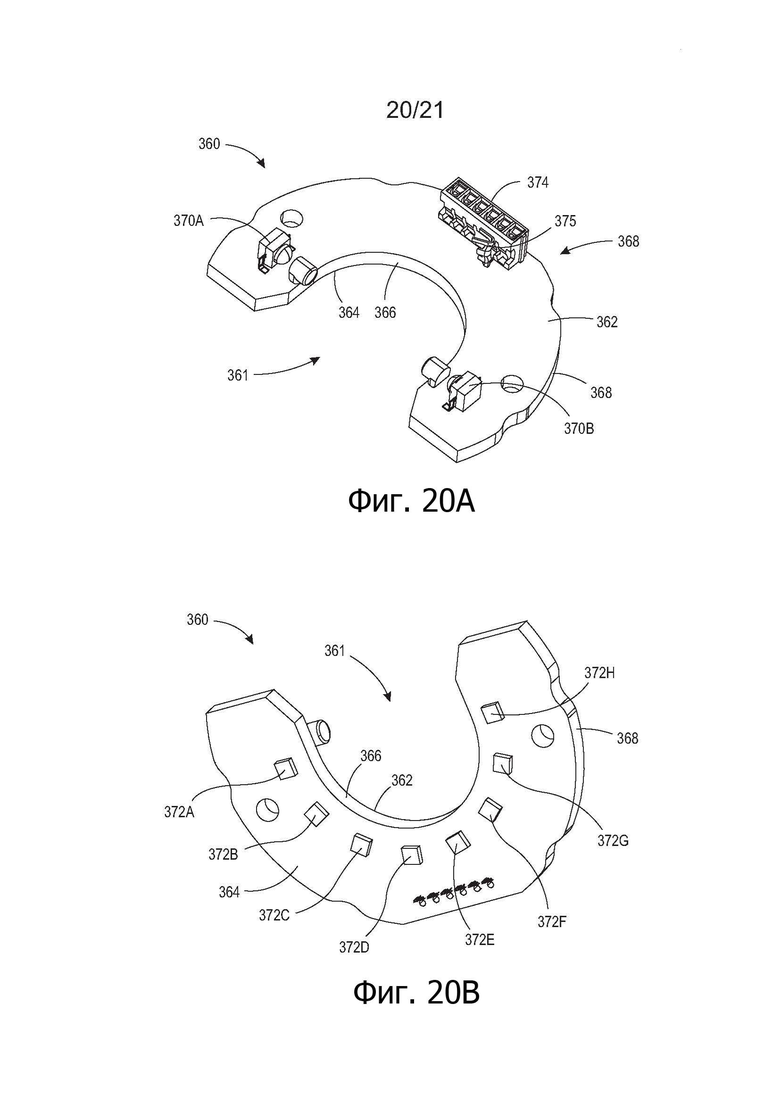
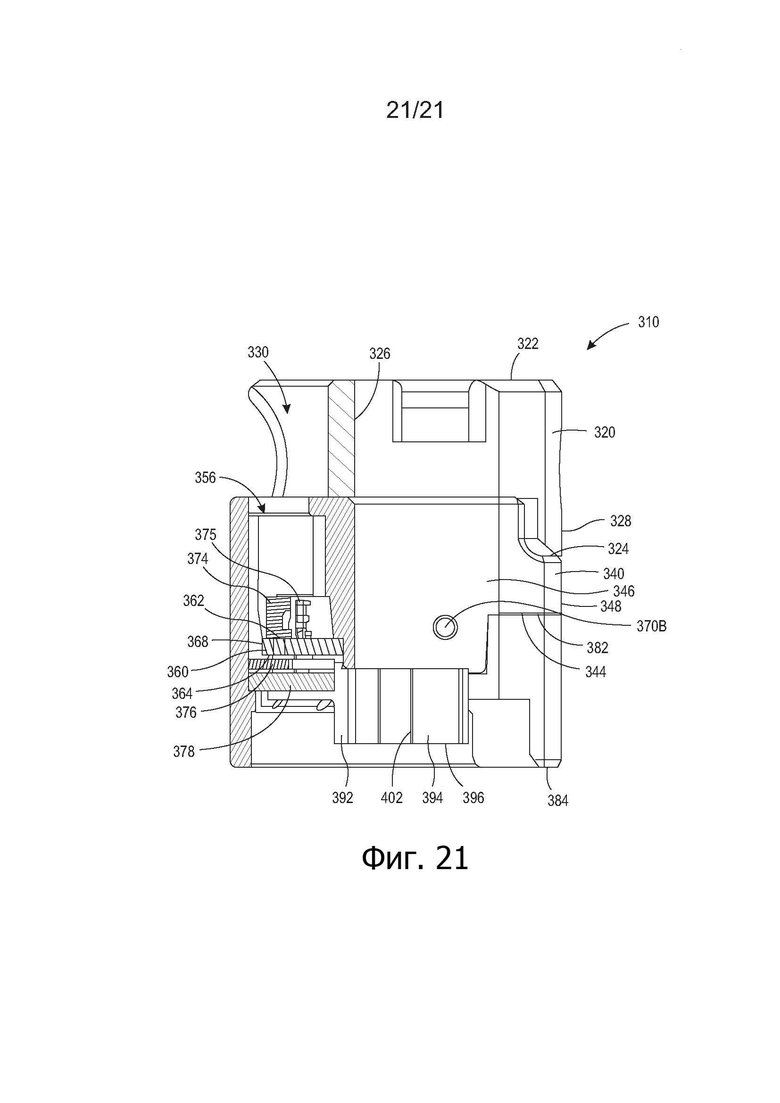
Изобретение относится к устройству для проверки соединения, предназначенного для взаимодействия с гидравлическим соединением, включающим в себя конец трубы, гидравлический соединитель и пружинное стопорное кольцо с одним или более выступами. Указанное устройство для проверки соединения содержит башмак, содержащий отверстие, и зонд, содержащий переднюю кромку, функционально приспособленную для взаимодействия с пружинным стопорным кольцом, а также схему, расположенную в указанном отверстии. Указанная схема функционально приспособлена для обнаружения одного или более усилий, приложенных к передней кромке. Указанное устройство для проверки соединения функционально приспособлено для определения правильности гидравлического соединения по одному или более усилиям, действующим на переднюю кромку. 3 н. и 17 з.п. ф-лы, 31 ил.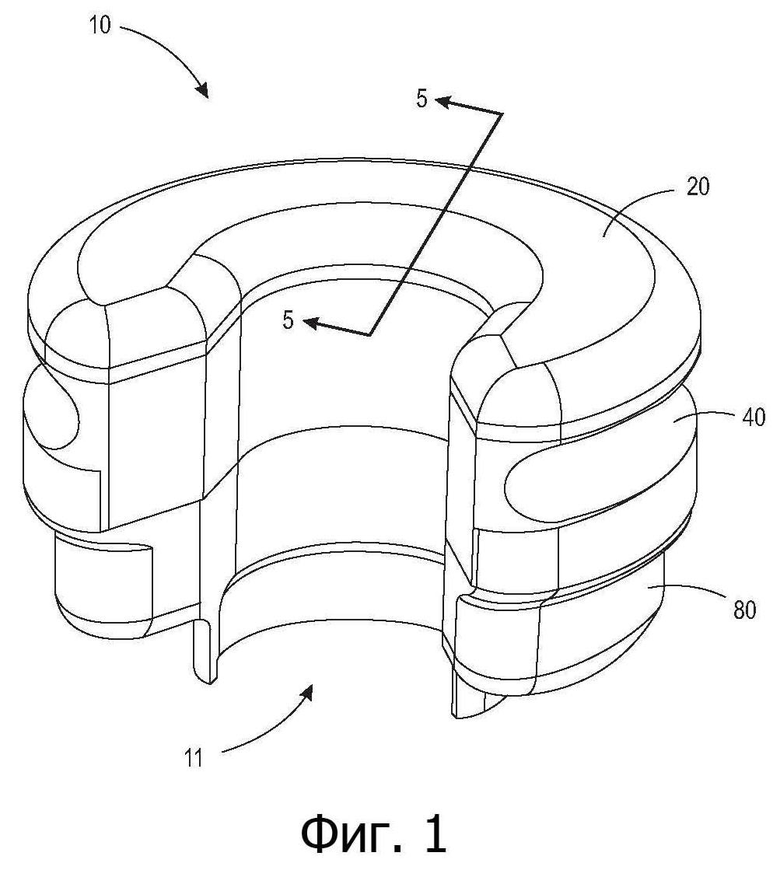
1. Устройство для проверки соединения, включающее в себя:
башмак, содержащий:
первую верхнюю поверхность;
первую нижнюю поверхность;
первую обращенную радиально наружу поверхность;
первую обращенную радиально внутрь поверхность;
первое отверстие, расположенное между обращенной радиально наружу поверхностью и первой обращенной радиально внутрь поверхностью; и
зонд, отходящий от первой нижней поверхности; и
схему, расположенную в первом отверстии рядом с первой нижней поверхностью и функционально приспособленную для обнаружения усилия, приложенного к зонду.
2. Устройство для проверки соединения по п. 1, в котором схема содержит:
вторую верхнюю поверхность; и
вторую нижнюю поверхность, содержащую один или более входных датчиков, расположенных по её окружности и функционально приспособленных для обнаружения усилия.
3. Устройство для проверки соединения по п. 1, дополнительно содержащее элемент предварительной нагрузки, функционально установленный между башмаком и второй нижней поверхностью для прикладывания предварительной нагрузки к одному или более входным датчикам.
4. Устройство для проверки соединения по п. 1, в котором зонд содержит один или более участков, отделенных друг от друга одной или более прорезями.
5. Устройство для проверки соединения по п. 1, дополнительно содержащее корпус, приспособленный для взаимодействия с башмаком и закрепления схемы в первом отверстии.
6. Устройство для проверки соединения по п. 5, в котором корпус содержит:
третью верхнюю поверхность;
третью нижнюю поверхность;
третью обращенную радиально наружу поверхность;
третью обращенную радиально внутрь поверхность; и
вставляемую часть, отходящую от третьей нижней поверхности и приспособленную для взаимодействия с первым отверстием.
7. Устройство для проверки соединения по п. 1, дополнительно содержащее тактильное устройство, соединенное со схемой и создающее обратную связь в форме вибрации, света и/или звука.
8. Устройство для проверки соединения по п. 1, в котором зонд содержит контактную кромку, функционально приспособленную для взаимодействия с пружинным стопорным кольцом гидравлического соединения.
9. Устройство для проверки соединения по п. 8, в котором схема функционально приспособлена для сравнения входных усилий, обнаруженных каждым из указанных одного или более датчиков, для проверки правильности гидравлического соединения.
10. Устройство для проверки соединения по п. 8, дополнительно содержащее проем, предназначенный для взаимодействия с концом трубы гидравлического соединения.
11. Устройство для проверки соединения по п. 10, в котором схема дополнительно содержит оптический датчик, функционально приспособленный для определения, правильно ли расположено устройство для проверки соединения вокруг конца трубы.
12. Устройство для проверки соединения, предназначенное для взаимодействия с гидравлическим соединением, включающим в себя конец трубы, гидравлический соединитель и пружинное стопорное кольцо с одним или более выступами, причем устройство для проверки соединения включает в себя:
башмак, содержащий:
первую верхнюю поверхность;
первую нижнюю поверхность;
первую обращенную радиально наружу поверхность;
первую обращенную радиально внутрь поверхность;
первое отверстие, расположенное между первой обращенной радиально наружу поверхностью и первой обращенной радиально внутрь поверхностью; и
зонд, содержащий контактную кромку, функционально приспособленную для взаимодействия с пружинным стопорным кольцом;
схему, функционально размещенную в первом отверстии для обнаружения усилия, приложенного к зонду; и
корпус, приспособленный для взаимодействия с первым отверстием и заключения схемы в башмаке.
13. Устройство для проверки соединения по п. 12, в котором схема содержит:
вторую верхнюю поверхность; и
вторую нижнюю поверхность, содержащую один или более входных датчиков, расположенных по её окружности и функционально приспособленных для обнаружения усилия.
14. Устройство для проверки соединения по п. 12, дополнительно содержащее элемент предварительной нагрузки, функционально установленный между башмаком и второй нижней поверхностью для прикладывания предварительной нагрузки к одному или более входным датчикам.
15. Устройство для проверки соединения по п. 12, в котором зонд содержит один или более участков, отделенных друг от друга по окружности одним или более пространствами.
16. Устройство для проверки соединения по п. 12, в котором схема функционально приспособлена для сравнения входных усилий, обнаруженных каждым из указанных одного или более входных датчиков, для проверки правильности гидравлического соединения.
17. Устройство для проверки соединения по п. 12, дополнительно содержащее проем, приспособленный для взаимодействия с концом трубы.
18. Устройство для проверки соединения по п. 12, в котором схема дополнительно содержит оптический датчик, функционально приспособленный для определения, правильно ли расположено устройство для проверки соединения на конце трубы.
19. Устройство для проверки соединения по п. 12, дополнительно включающее в себя тактильное устройство, соединенное со схемой и содержащее устройство обратной связи.
20. Устройство для проверки соединения, предназначенное для взаимодействия с гидравлическим соединением, включающим в себя конец трубы, гидравлический соединитель и пружинное стопорное кольцо с одним или более выступами, причем устройство для проверки соединения включает в себя:
башмак, содержащий:
отверстие; и
зонд, содержащий переднюю кромку, функционально приспособленную для взаимодействия с пружинным стопорным кольцом; и
схему, установленную в отверстии, функционально приспособленную для обнаружения одного или более усилий, приложенных к передней кромке;
причем указанное устройство для проверки соединения функционально приспособлено для определения правильности гидравлического соединения по одному или более усилиям, действующим на переднюю кромку.
| US 20150345684 A1, 03.12.2015 | |||
| FR 3065050 B1, 19.04.2019 | |||
| US 20110133759 A1, 09.06.2011 | |||
| WO 2009068932 A1, 04.06.2009 | |||
| US 5921588 A1, 13.07.1999 | |||
| Устройство для регистрации работы трубопротяжных станов | 1930 |
|
SU31629A1 |

