Изобретение, в общем, относится к прогнозированию урожайности и, прежде всего, к способу прогнозирования урожайности. Кроме того, изобретение относится к соответствующей системе для прогнозирования урожайности зернового поля и к соответствующей компьютерной системе.
После того как автоматизация классических сфер производства в промышленном производстве продвинулась далеко вперед, эта тенденция продолжается теперь в классической сельскохозяйственной сфере. Хотя применение средств наблюдения и контроля в сельскохозяйственных производственных процессах не является повсеместной нормой, тем не менее и здесь имеется прогресс. Классические промышленные технологии часто могут переноситься на сельскохозяйственные процессы и машины. Конечно, при этом следует учитывать по меньшей мере одно: выбранные технологии должны быть простыми в обращении и надежными. Кроме того, требуется, чтобы используемые технологии были экономичными, поскольку ценовое давление за счет глобализации постоянно возрастает также и в сельскохозяйственных производственных процессах.
С другой стороны, тут и там существуют предубеждения относительно использования высоких технологий в крестьянских хозяйствах, поскольку обращение с этими технологиями не относится к стандартным познаниями в этих областях. Следовательно, информационные технологии, которые должны использоваться в сельскохозяйственных предприятиях, должны управляться просто и интуитивно.
Хотя в зависимости от страны в некоторых регионах мира уже существуют весьма хитроумные инициативы цифрового ведения сельского хозяйства, которые частично достигли высокой степени автоматизации также при проведении полевых работ, тем не менее могут быть со сравнительно малыми затратами достигнуты заметные улучшения, когда в простой форме широким фронтом становятся используемыми поддерживаемые технологиями обработки изображений и информационными технологиями аналитические методы. Лучше всего это происходит в виде технологий, которые уже проникли в повседневную жизнь населения.
При прогнозировании урожайности в сельском хозяйстве, прежде всего, при прогнозировании урожайности зерновых полей, до сих пор используется мало количественных параметров. Чаще всего это все еще опытные данные. При этом наряду с надежными метеорологическими данными были бы полезны дополнительные аналитические методы, которые позволяют сельскохозяйственному производителю получить почти точный прогноз урожайности поля, чтобы решить, когда будет хорошее время уборки урожая.
Таким образом, с точки зрения производителя могут принести пользу также колебания закупочных цен покупателя, как, например, сельскохозяйственных кооперативов или промышленных крупных покупателей, для оптимизации прибыли.
Следовательно, существует потребность в улучшенном прогнозировании урожайности зерновых полей и других сельскохозяйственных угодий. Предмет настоящего документа направлен на этот круг задач.
Лежащая в основе этой заявки задача решена предметом независимых пунктов формулы изобретения. Дополнительные примеры осуществления представлены независимыми пунктами формулы изобретения.
Согласно первому аспекту настоящего изобретения представлен способ прогнозирования урожайности зернового поля. Способ может содержать размещение цифровой камеры на заданном расстоянии над средней плоскостью колосьев зернового поля и регистрацию цифрового изображения фрагмента зернового поля зернового поля с помощью размещенной цифровой камеры. При этом средняя плоскость колосьев может быть расположена параллельно плоскости изображения цифровой камеры.
Кроме того, способ может содержать определение площади сфотографированного фрагмента зернового поля из заданного расстояния и угла поля зрения цифровой камеры, а также определение общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения посредством алгоритма различения между пикселями изображения колосьев в противоположность общему набору других пикселей изображения, которые не относятся к колосьям.
Кроме того, способ может содержать определение урожайности поля из общей площади колосьев в цифровом изображении. Это может происходить в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и первого калибровочного коэффициента. При этом калибровочный коэффициент содержит информацию о среднем размере колоса на цифровом изображении и по меньшей мере одну зависимость в отношении одного из факторов, выбранного из группы, состоящей из сорта, стадии роста, метеорологических условий, географического местоположения и состояния подкормки.
Согласно еще одному аспекту изобретения представлена система для прогнозирования урожайности зернового поля. Система может иметь цифровую камеру, которая размещена на заданном расстоянии над средней плоскостью колосьев зернового поля. При этом цифровая камера может быть выполнена для регистрации цифрового изображения фрагмента зернового поля зернового поля с помощью размещенной цифровой камеры. Средняя плоскость колосьев и плоскость изображения цифровой камеры могут располагаться параллельно друг другу.
Дополнительно, система может иметь блок определения частичной площади для определения площади сфотографированного фрагмента зернового поля из заданного расстояния и угла поля зрения цифровой камеры, а также для блок для определения площади колосьев, который выполнен для определения общей площади колосьев на цифровом изображении. Это может происходить путем в сравнении с общей площадью цифрового изображения посредством алгоритма различения между пикселями изображения колосьев в противоположность другим пикселям изображения, которые не относятся к колосьям.
Кроме того, в системе может иметься модуль определения урожайности для определения урожайности поля из общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и калибровочного коэффициента. При этом калибровочный коэффициент содержит информацию о среднем размере колоса на цифровом изображении и по меньшей мере одну зависимость в отношении одного из факторов, выбранного из группы, состоящей из сорта, стадии роста, метеорологических условий, географического местоположения и состояния подкормки.
Следует указать на то, что представленная система может быть реализована как часть смартфона. Помимо этого, представленный здесь способ может выполняться посредством высокопроизводительной формы смартфона полностью или частично посредством этого смартфона. Факультативно, определение общего числа зерен колосьев может выполняться на специализированном, специально выполненном для этой цели компьютере, служебном компьютере или другой компьютерной системе.
Для этого может быть необходимым, чтобы примеры осуществления имели форму компьютерного программного продукта. Он может иметь команды, которые, при выполнении их на компьютерной системе, выполняют шаги описанного способа.
Представленный способ определения массы всех зерен колоса стебля, а также соответствующая система имеют ряд преимуществ и технических эффектов.
По причине простоты использованных средств для определения урожайности или для прогнозирования урожайности зернового поля способ можно использовать везде без больших затрат. В случае, когда цифровые фотографии сначала посылаются для оценки в вычислительный центр, этот вычислительный центр может находиться практически в любом месте. Вычисление может быть предложено в виде услуги. Если, с другой стороны, оценка происходит непосредственно в приложении в смартфоне, в котором также находится цифровая камера, то отсутствуют затраты на связь, и результаты оценки имеются в распоряжении практически непосредственно. Наряду со смартфоном цифровая камера, а также необходимая оценивающая логика и в некоторых случаях средства связи для мобильной передачи данных могут находиться в другом или специально предусмотренном в соответствии с изобретением целью устройстве.
Факультативно, возможные размещения цифровой камеры над зерновым полем позволяют, с одной стороны, получение цифрового фотоснимка с возвышенного местоположения над поверхностью зернового поля (например, с сельскохозяйственной машины), С другой стороны также можно получать требуемые цифровые фотографии, стоя на зерновом поле посредством цифровой камеры, которая установлена на шесте.
Помимо этого, предлагаемый способ прогнозирования урожайности может комбинироваться с другими элегантными способами определения массы зерна одного колоса. Так, оценка урожайности зернового поля может происходить непосредственно на основании фотографий зернового поля. Для способа анализа урожайности и частичного способа определения массы зерна может использоваться одна и та же цифровая камера. Кроме того, вычисления для прогнозирования урожайности, а также вычисления для определения массы зерна могут выполняться на одной и той же компьютерной системе, так что можно будет результаты одного вычисления (масса зерна) предоставить в распоряжение другому вычислению (прогнозирование урожайности) в виде входных значений.
Если в распоряжении имеется высокопроизводительный смартфон или другой специализированный прибор с соответствующей высокопроизводительной электроникой и цифровой камерой, то названные определения (масса зерна и прогнозирование урожайности) могут выполняться непосредственно в этом смартфоне или другом специализированном приборе.
Для предварительного определения массы зерна колоса для улучшенного прогнозирования урожайности может быть, как уже упоминалось, в качестве внешнего интерфейса использована одна и та же цифровая камера, например из смартфона. Использование мобильного прибора достаточно, чтобы предоставить фермерам возможность обеспечить улучшенное прогнозирование урожайности их зернового поля. При этом в качестве исходной точки может быть важным определение продуктивности одного колоса зернового поля. Уже одной или двух цифровых фотоснимков колоса достаточно, чтобы предоставить фермерам возможность заметно улучшить прогнозирование урожайности поля. Дополнительный повседневный предмет в виде эталонной карты не усложняет использование и приемлемость способа.
При этом колосья могут быть сорваны или отрезаны и положены на эталонную карту, или колосья могут оставаться на стебле и эталонная карта может быть просто размещена за колосьями. С помощью шкалы эталонной карты обеспечивается однозначный нефальсифицированный масштаб с цифровыми фотоснимками.
Требуемые вычислительные мощности для автоматического измерения колосьев и массы зерна колоса могут предоставляться в распоряжение в вычислительном центре. Этот вычислительный центр, так же как вычислительный центр для вычисления урожайности поля, может эксплуатироваться в любом месте. Или одним фермером может быть использован один компьютер, несколько фермеров могут совместно использовать один компьютер, или оператор услуг берет на себя аналитическую работу и предоставляет требуемые вычислительные мощности. Последнее имело бы дополнительное преимущество, что вычислительные мощности могут эксплуатироваться в виде облачного компьютерного сервиса для большого числа фермеров в разных районах или также в разных странах. При этом было бы легко учитывать параллели между разными регионами, глобальными и также локальными погодными влияниями или также локально известными зараженностями вредителями, использованием удобрений или использованием средств борьбы с вредителями.
Цифровое изображение может быть передано через мобильные сети на выполняющий оценку компьютер. Может быть выполнен анализ, и результаты переданы по радио назад фермеру или в мобильное устройство. Посредством дополнительного способа может быть осуществлена экстраполяция, исходя из массы зерна колоса на все поле.
В усовершенствованном виде и вместе с высокопроизводительной компьютерной системой в мобильном устройстве анализы могут проводиться непосредственно на месте. Необходимые алгоритмы обработки находиться в распоряжении в виде приложения для смартфона. Факультативно, к мобильному устройству может быть подключено или встроено в мобильное устройство специализированное вычислительное устройство (специальный процессор или специализированное аппаратное обеспечение).
Кроме того, не всегда является безусловно необходимым, но предпочтительным, использование для цифровой съемки смартфона. Фермер мог бы также использовать обычную цифровую камеру и переносить цифровые фотоснимки колосьев в другой форме на компьютер для анализа, например, через беспроводные технологии связи или релейные станции, которые имеют в своем распоряжении известные способы связи, такие как WLAN, блютус и другие сравнимые средствами связи.
Определение природных не постоянных уступов стержня колоса и умножение установленных уступов стержня на среднее число зерен на уступ стержня делает возможным элегантное определение числа зерен в колосе. За счет этого закладывается основа для оценки урожайности поля.
Используемый для определения числа уступов стержня способ сравнения с эталоном обеспечивает посредством получения цифровых фотоснимков колосьев в виде стержня или вида уступов стержня и второго цифрового фотоснимка, который повернут вокруг продольной оси на 90° (цветочный вид) хорошую основу для дополнительных шагов обработки изображения и получения данных.
Далее будут описаны дополнительные варианты осуществления предлагаемого способа определения массы всех зерен колоса стебля.
Согласно одному варианту осуществления способа определения урожайности поля используемый алгоритм для различения между пикселями изображения колосьев в противоположность остальным пикселям изображения может быть алгоритмом локального бинарного шаблона. В принципе такие алгоритмы известны. Пример опубликован в: DC. Не and L. Wang, "Texture Unit, Texture Spectrum, And Texture Analysis", IEEE Transactions on Geoscience and Remote Sensing, vol. 28, pp. 509-512, 1990; 
 and T. Ojala, "Texture classification by multi-predicate local binary pattern operators", Proceedings 15th International Conference on Pattern Recognition, Barcelona, Spain, 3:951-954, 2000. За счет этого в распоряжении имеется мощный алгоритм вычислений, который непосредственно и легко является используемым для предлагаемого способа в виде существующих библиотек программ.
and T. Ojala, "Texture classification by multi-predicate local binary pattern operators", Proceedings 15th International Conference on Pattern Recognition, Barcelona, Spain, 3:951-954, 2000. За счет этого в распоряжении имеется мощный алгоритм вычислений, который непосредственно и легко является используемым для предлагаемого способа в виде существующих библиотек программ.
Согласно еще одному предпочтительному варианту осуществления изобретения алгоритм для различения между пикселями изображения колосьев в противоположность остальным пикселям изображения может быть способом анализа текстуры изображения. Также и такие способы в принципе известны, могут приспосабливаться к требованиями представленного способа и описаны, например, в: F. Cointault, D. Guerin, J-P. Guillemin & В. Chopinet, In-field Triticum aestivum ear counting using colour-texture image analysis", New Zealand Journal of Crop and Horticultural Science, vol. 36, pp. 117-130, 2008. Также и этот алгоритм может легко приспосабливаться к показанной здесь постановке задачи.
Дополнительно, согласно предпочтительному варианту осуществления изобретения алгоритм для различения между пикселями изображения колосьев в противоположность остальным пикселям изображения может иметь фильтр различения яркости или состоять из него. Впрочем, следует принимать во внимание, что вполне могут иметься различия в распознавании в зависимости от освещения, времени дня, долей цветности в свете неба, а также в зависимости от дождя, тумана и/или инсоляции. По этой причине может быть предпочтительным всегда получать изображения колосьев или фрагмента поля с помощью искусственного освещения, как, например, искусственной вспышки.
Согласно еще одному предпочтительному варианту осуществления способа заданное расстояние между цифровой камерой и поверхностью зернового поля могут задавать с помощью дистанционного элемента. При этом дистанционный элемент может состоять из гибкого элемента, как, например, веревки, один конец которой закреплен на цифровой камере, а на его другом конце может находиться цветоконтрастный шар, который располагают в средней плоскости колосьев зернового поля. За счет цветового контраста цветоконтрастного шара относительно окружающей среды (то есть по существу колосьев) он является хорошо видимым или распознаваемым на цифровой фотографии посредством распознавания образов. Цветоконтрастный шар может иметь, например, синий или зелено-синий цвет. Наряду с шаром могут приниматься в расчет и другие правильные геометрические формы, такие как пирамида, бочка, кубик, коробчатый элемент или также предметы неправильной формы, которые обладают хорошим цветовым контрастом относительно цветового тона колосьев.
Согласно одному дополнительному варианту осуществления способа заданное расстояние между цифровой камерой и средней плоскостью колосьев могу определять посредством дистанционного элемента. Тем самым цифровая камера может быть закреплена под предварительно определенным углом, который не равен 90 градусам, на конце дистанционного элемента, причем другой конец дистанционного элемента может быть расположен в средней плоскости колосьев зернового поля. Цифровое изображение может быть сфотографировано, когда площадь изображения цифровой камеры ориентирована горизонтально. Срабатывание может быть запущено автоматически посредством датчиков положения или ускорения, которые могут быть подключены к цифровой камере. При этом предполагается, что средняя плоскость колосьев зернового поля простирается горизонтально.
Согласно изобретению после размещения цифровой камеры и регистрации цифрового изображения фрагмента зернового поля определяют размер поверхности сфотографированного фрагмента зернового поля ("Определение площади сфотографированного фрагмента зернового поля из заданного расстояния и угла поля зрения цифровой камеры"). В следующем шаге из цифрового фотоснимка определяют общую площадь колосьев на цифровом изображении ("Определение общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения"). Результатом является, например, выраженное в процентах число пикселей цифровой фотографии колосьев. В следующем шаге может быть определено число колосьев на цифровой фотографии. Для этого требуется знать, какую площадь (сколько пикселей) в среднем занимает отдельный колос. Эта величина может быть представлена первым калибровочным коэффициентом, который обычно определяется опытным путем. При делении общей площади изображения, которая относится к колосьям, на средний размер площади, которую занимает отдельный колос, получают число колосьев на изображении. При делении числа колосьев на изображении на величину площади зернового поля на фрагменте изображения получают число колосьев на единицу площади зернового поля. При умножении числа колосьев на единицу площади зернового поля на общую площадь поля получается число колосьев на всем поле. При умножении числа колосьев на всем поле на среднюю массу зерна колоса, то получается масса зерна всего поля и тем самым урожайность ("Определение урожайности поля из общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и первого калибровочного коэффициента"). В одном предпочтительном варианте осуществления способа калибровочный коэффициент может содержать по меньшей мере одну зависимость в отношении одного из факторов сорта, стадии роста, прежде всего представленную в виде ВВСН-кода, погоды, географического местоположения и/или состояния подкормки. Возможны дополнительные зависимости. Географическое местоположение может быть определенно через GPS-координаты (GPS-глобальная система позиционирования). Сам калибровочный коэффициент может быть прямой функцией входных переменных. Специализированные входные значения могут храниться вместе с результатами в матрице и запрашиваться способом.
Согласно одному предпочтительному варианту осуществления способа определение общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения может содержать умножение площадей колосьев на поверхностный коэффициент, величина которого уменьшается от центра цифрового изображения к краю. Это является предпочтительным потому, что в то время как колосья в центре изображения могут фотографироваться скорее центрально сверху, в то время как колосья в краевых областях цифрового изображения, обусловлено другим углом поля зрения, скорее могут фотографироваться со стороны и тем самым занимать больший фрагмент изображения. За счет поверхностного коэффициента этот эффект может быть компенсирован.
Согласно одному полезному варианту осуществления способа он может содержать обеспечение второго цифрового изображения отдельного колоса в виде уступов стержня колоса. При этом колосья на цифровом изображении могут отображаться перед эталонной картой.
Способ согласно этому варианту осуществления может, кроме того, содержать определение длины колоса вдоль продольной оси колоса за счет отделения пикселей изображения цифрового изображения колоса от заднего плана, и сравнения координат пикселей на одном конце колоса с координатами колоса на противоположном конце колоса в продольном направлении колоса с метками изображения на эталонной карте.
Кроме того, способ согласно этому варианту осуществления может содержать определение числа уступов стержня колоса посредством способа сравнения с эталоном, определение числа зерен колоса путем умножения установленных уступов стержня на коэффициент и определение массы всех зерен колоса путем умножения определенного числа зерен на второй калибровочный коэффициент.
За счет этого можно элегантным образом установить массу зерна колоса без необходимости взвешивания. Оптический способ позволяет элегантно и непосредственно определять массу зерна или в смартфоне или в отдельном вычислительном центре, которому передано сфотографированное цифровое изображение в виде уступов стержня. За счет этого один и тот же технический прибор, а именно, смартфон, может быть использован как для определения массы зерна, так и для определения урожайности поля.
Согласно еще одному предпочтительному варианту осуществления изобретения способ сравнения с эталоном может содержать попиксельное смещение выбранного состоящего из центральной частичной области колоса эталона изображения по всему колосу в продольном направлении колоса.
Дополнительно, способ может содержать соответствующее определение соответствующего коэффициента подобия эталона изображения с соответствующим перекрытым участком колоса в каждом положении смещения. За счет этого могут возникать регулярные относительные максимумы в отношении коэффициента подобия x-y-представления. В представлении направление х представления может быть числом пикселей или положением пикселей, а в направлении y может наноситься значение подобия соответствующего участка колоса с эталоном.
Выбранная частичная область колоса может занимать примерно 15-25% колоса в средней области колоса. Дополнительно, этот вариант осуществления может содержать определение числа стержней из x-y-представления. Поскольку в случае способа сравнения с эталоном речь идет об известном из области обработки изображений способе, то могут быть использованы традиционные функции библиотек программ и модули библиотек программ. За счет использования способа сравнения получается хорошая точность и надежность против колебаний геометрии освещения при определении уступов стержня. Это является предпочтительным потому, что число уступов стержня оказывает решающее влияние на число зерен колоса. Дополнительный уступ стержня колоса может быть равнозначен 4 дополнительными зернами, из-за чего общее число зерен колоса может увеличиваться на величину до 10%. Следовательно, наиболее точное определение числа уступов стержня равносильно точности предлагаемого способа.
При этом согласно дополняющему специальному варианту осуществления определение в способе числа стержней из х-у-представления может содержать определение числа относительных максимумов значений подобия путем простого перечисления. Этот образ действия требует небольшой вычислительной мощности, однако по сравнению с другими способами является не самым точным, так как степень подобия к концам колоса снижается и, следовательно, максимумы больше не так выражены, как в центральной области колоса.
Согласно еще одному варианту осуществления определение в способе части уступов из x-y-представления может содержать установление средней длины периода из расстояний между относительными максимумами значений подобия, и определение числа уступов путем деления длины колоса на длину периода.
В противоположность описанному выше варианту осуществления, этот описываемый теперь вариант осуществления может иметь более высокую степень точности при определении числа уступов стержня. Это объясняется тем, что относительные максимумы в x-y-представлении могут быть выражены более четко, чем в вышеописанном варианте осуществления. Таким образом, получается более высокая точность при определении числа уступов стержня колоса.
В дополнительном предпочтительном примере осуществления второй калибровочный коэффициент может содержать по меньшей мере одну зависимость в отношении одного из следующих факторов: сорта колоса, стадии роста колоса, метеорологических условий (длительно или краткосрочно), географического местоположения и состояния подкормки. В любое время могут быть учтены дополнительные параметры влияния.
Согласно одному факультативному способу определения массы зерна одного колоса способ прогнозирования урожайности для зернового поля может содержать частичный способ, прежде всего, способ определения массы зерна для определения массы всех зерен колоса стебля. При этом этот частичный способ мог бы быть использован как альтернатива частичному способу, в котором используется вид уступов стержня колоса. Этот способ определения массы зерна может содержать обеспечение цифрового изображения колоса в цветочном виде колоса перед эталонной картой и установление площади цветочного вида колоса путем отделения пикселей изображения цифрового изображения колоса от заднего плана посредством способа цветовой гистограммы. Кроме того, этот способ определения массы зерна может содержать сравнение занимаемой колосом площади с метками изображения на эталонной карте. Дополнительно, предназначенный для определения массы зерна частичный способ способа прогнозирования урожайности содержит определение массы всех зерен колоса путем умножения установленной площади колосьев на калибровочный коэффициент. При этом этот калибровочный коэффициент может содержать различные зависимости от сорта, стадии роста, погоды, зараженности вредителями и т.д.
Это частичный способ имеет преимущество, что он может легко применяться. Интенсивность расчетов может быть меньше, чем в частичном способе определения массы зерна, который использует вид уступов стержня колоса. За счет этого этот частичный способ может легче реализовываться в мобильном приборе при использовании в поле. Факультативно, было бы также возможно передавать сфотографированные цифровые изображения оценочному вычислительному центру и снова принимать результат с помощью мобильного прибора на поле. Кроме того, этот частичный способ имеет преимущество, что цифровые фотографии на цветочном виде получаются легче, чем в виде уступов стержня, так как колосья в естественном положении располагаются в цветочном виде. Это было бы облегчением для тех, что занимается цифровым фотографированием. Оказалось, что с помощью описанного здесь способа определения массы зерна получаться относительно точные оценки массы зерна колоса.
Согласно одному предпочтительному варианту осуществления система для анализа урожайности зернового поля имеет приемно-передающий блок, который выполнен для пересылки сфотографированных цифровых изображений фрагмента зернового поля или также второй цифровой фотографии вычислительному центру, который имеет блок определения частичной площади, блок определения площади колосьев и блок определения урожайности. Тогда после вычисления блоками определения и модулями результат может быть отправлен на смартфон, цифровую камеру или другой мобильный прибор и подвергнут повторной оценке непосредственно на поле.
Помимо этого, примеры осуществления могут иметь форму выполненного компьютерного программного продукта, к которому можно получить доступ с пригодного для использования с компьютером или машиночитаемого носителя информации. Команды могу заставить компьютер, как, например, смартфон, сервер или их комбинацию, выполнять шаги обработки согласно представленным способам. Для цели данного описание пригодным для использования с компьютером или машиночитаемым носителем информации может быть любое устройство, которое имеет элементы для хранения, связи, передачи или дальнейшего направления программы вместе с обрабатывающей команды системой.
Изобретение будет дополнительно разъяснено ниже с помощью примеров осуществления и фигур. Следует указать на то, что аспекты изобретения описаны в контексте разных видов примеров осуществления. Некоторые примеры осуществления описаны со ссылкой на относящиеся к способу пункты формулы изобретения, в то время как другие примеры осуществления описаны в контексте относящихся к устройству пунктов формулы изобретения. Несмотря на это, специалист из предшествующего и последующего описания может понять, если только не указывается на отклонение, что не только признаки одного вида пунктов формулы изобретения являются комбинируемыми друг с другом, но также и охватывающие несколько видов пунктов формулы изобретения представляют собой возможную комбинацию признаков.
Представленные выше аспекты, а также дополнительные аспекты настоящего изобретения следуют из примеров осуществления и фигур, которые более подробно описываются ниже.
Эти примеры осуществления служат в качестве возможных форм реализации, не ограничиваясь ними, и они ссылаются на следующие фигуры:
Фиг. 1 показывает блок-схему варианта осуществления способа прогнозирования урожайности зернового поля согласно изобретению.
Фиг. 2 показывает размещение цифрового фотографического устройства над колосьями зернового поля.
Фиг. 3 показывает вспомогательное средство для желательного размещения камеры над средней плоскостью колосьев зернового поля.
Фиг. 4 показывает альтернативу для воспроизводимого установления расстояния камеры от средней плоскостью колосьев зернового поля.
Фиг. 5 показывает приведенную в качестве примера фотографию зернового поля согласно способу, который представлен в связи с фиг. 4 и фиг. 5.
Фиг. 6 показывает блок-схему частичного способа определения массы зерна колоса.
Фиг. 7 показывает первую часть блок-схемы близкого к реализации варианта осуществления предлагаемого способа.
Фиг. 8 показывает вторую часть блок-схемы близкого к реализации варианта осуществления предлагаемого способа согласно фиг. 7.
Фиг. 9 показывает изображенный абстрактно колос и пример эталонной карты вместе с лежащим на ней колосом.
Фиг. 9а показывает изображение колоса и вид уступов колоса.
Фиг. 10 показывает приведенный в качестве примера график для определения длины колоса.
Фиг. 11 показывает приведенный в качестве примера график функции взаимной корреляции для определения числа уступов стержня.
Фиг. 12 показывает блок-схема частичной системы для определения общего числа зерен колоса стебля.
Фиг. 13 показывает блок-схему системы для прогнозирования урожайности зернового поля.
Фиг. 14 показывает блок-схему примера компьютерной системы вместе с системой согласно фиг. 13 и/или фиг. 12.
В контексте данного описания могут быть использованы следующие договоренности, термины и/или выражения:
Термин "стебель" или "колос стебля" не требует дополнительной интерпретации. При этом речь может идти об обычной зерновой культуре, которая растет на сельскохозяйственном поле. Типичным образом в отношении зерновых культур речь может идти о пшенице, ржи или ячмене.
Термин "цифровое изображение" описывает цифровое отображение реальной сцены, которая типичным образом может быть сфотографирована с помощью цифровой камеры. Цифровое изображение или цифровая фотография может составляться из пикселей с разными цифровыми координатами и таким образом, создавать графическое изображение. В представленном здесь способе регистрируют цифровую фотографию поверхности зернового поля с высоты птичьего полета и, при необходимости, дополнительную цифровую фотографию отдельного колоса для определения массы зерна типичного колоса.
Термин "цветочный вид колоса" описывает вид колоса, в котором хорошо видны зерна колоса. Цветочный вид может также называться зерновым видом колоса, так как на этом виде лучше всего видны зерна колоса. На этом виде ости колоса простираются преимущественно влево и вправо от колоса. На этом виде видимая поверхность колоса является самой большой. В противоположность цветочному виду, понятие "вид уступов колоса" описывает повернутый на 90° вдоль продольной оси колоса вид колоса, то есть вид узкой видимой части колоса. Таким образом, при этом смотрят на более узкую сторону колоса или на ости колоса, когда продольная ось колоса простирается вертикально.
"Эталонная карта" в контексте данного изобретения описывает плоский предмет, например одноцветную карту, цветовой тон которого хорошо отличается от цветового тона колоса. Предпочтительным оказался дополнительный цветовой тон, например синий, относительно типичного цветового тона колоса.
Термин "способ сравнения с эталоном" известен специалисту как способ определения структуры представленного в цифровом виде предмета. Подробное описание содержится, например, в S. Kim, J. McNames, "Automatie spike deteetion based on adaptive template matching for extracellular neural recordings", Journal of Neuroscience Methods 165 pp. 165-174, 2007.
Термин "ступень развития" или "стадия развития" описывает ступень природного жизненного цикла растения, в данной случае колоса зерновой культуры, от посева до сбора урожая. Оказалось, что полезным для описания ступени развития растения является использования "ВВСН-кода". При этом сокращение "ВВСН" официально относится к "Biologische Bundesanstalt, Bundessortenamt und Chemische Industrie" (федеральное биологическое ведомство, федеральное ведомство по охране новых сортов растений и химическая промышленность). ВВСН-код описывает феноменологическую ступень развития растения. Код начинается с 00 и заканчивается на 89. ВВСН-код от 10 до 19 описывает, например, раннюю стадию развития листа. Начиная с равного 60 ВВСН-кода появляются цветы растения (до 69). Каждыми следующими десятью шагами описываются развитие плодов (70-79), спелость плодов (80-89) и отмирание (90-99 - для однолетних растений) растений.
Термин "цифровая камера" описывает камеру, которая в качестве фотографирующей среды вместо фотографической пленки использует носитель информации. Цифровое изображение перед этим оцифровывается посредством электронного преобразователя изображения (датчика изображения).
Термин "цветоконтрастный шар" описывает предмет, которые обладает пространственной протяженностью, которая имеет такой же порядок величин, как и средняя длина колоса (например, имеет размер в несколько сантиметров), и масса порядка 10-100 г. В идеальном случае, его цвет является дополнительным к преобладающему цвету поверхности зернового поля. Предпочтительным образом, речь идет о дополнительном цвете зернового поля в зрелом состоянии. Например, цветоконтрастный шар может иметь на своей поверхности синий цветовой тон. Не обязательно, что речь идет действительно о шарообразном предмете. Возможны также другие геометрические формы. Важно, что цветоконтрастный шар посредством оптического способа распознавания является легко отличимым от элементов изображения зернового поля.
Термин "анализ текстуры изображения" описывает способ, в котором анализируется текстура предмета цифрового изображения. Под текстурой в этой связи понимается поверхностная форма проявления предмета или также его окружения. Примеры способа анализа текстуры описаны, например, в: F. Cointault, D. Guerin, J-P. Guillemin & В. Chopinet, In-field Triticum aestivum ear counting using colour-texture image analysis", New Zealand Journal of Crop and Horticultural Science, vol. 36, pp. 117-130, 2008.
На фиг. 1 показана блок-схема примера осуществления способа 100 согласно изобретению для прогнозирования урожайности зернового поля. Способ содержит размещение 102 цифровой камеры на заданном расстоянии над средней плоскостью колосьев зернового поля, то есть с высоты птичьего полета, и фотографирование 104 цифрового изображения фрагмента зернового поля зернового поля с помощью размещенной цифровой камеры. При этом средняя плоскость колосьев и плоскость изображения цифровой камеры должны располагаться параллельно друг другу. Это может происходить автоматически, в то время как используются датчики ускорения или положения камеры. Точно тогда, когда плоскость изображения ориентирована горизонтально, может происходить автоматическое срабатывание цифровой камеры.
Далее, способ содержит определение 106 площади сфотографированного фрагмента зернового поля из заданного расстояния и угла поля зрения цифровой камеры и определение 108 общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения посредством алгоритма различения между пикселями изображения колосьев в отличие от другие пикселей изображения, которые не относятся к колосьям. Основываясь на этом, способ содержит определение 110 урожайности поля из общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и первого калибровочного коэффициента. Этот первый калибровочный коэффициент может быть зависимым от сорта, роста, погоды, местоположения и/или использования удобрений. Также возможны дополнительные коэффициенты, такие как сведения о зараженности вредителями. Например, площадь сфотографированного фрагмента зернового поля могла бы составлять 4 м2. Из анализа цифрового изображения может следовать, что 20% пикселей можно приписать колосьям. При размере изображения 1920×1080 пикселей согласно этому колосьям можно было бы приписать 41472 пикселя. Из опытных исследований могло бы быть определено, что колос в данных условиях типично имеет среднюю величину в 208 пикселей. Тогда на цифровом фотоснимке отображались бы 200 колосьев. При фрагменте зернового поля площадью 4 м2 это соответствует примерно 50 колосьям на м2 площади поля. Если бы общая площадь поля составляла 1 км2, то на всем поле имелось бы 50 миллионов колосьев. Если бы средняя масса зерен составлял 3 г на колос, то общая масса зерен на поле составляла бы 150 т.
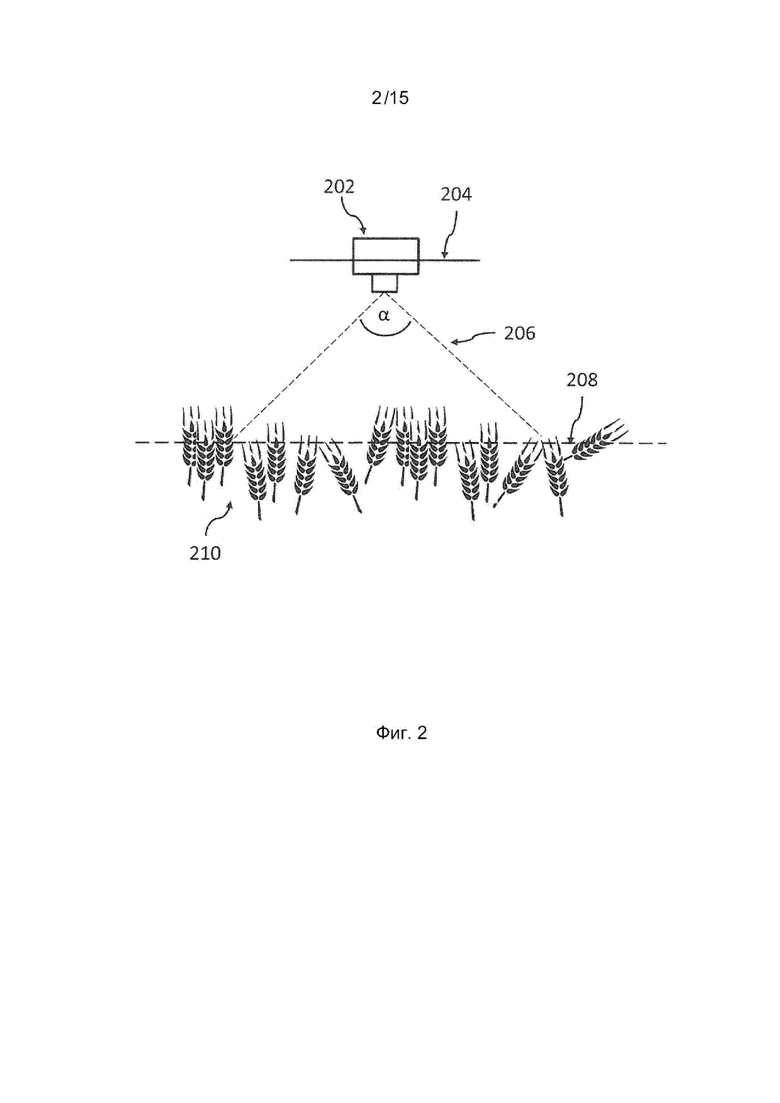
На фиг. 2 показано размещение цифрового фотографического устройства 202 над колосьями 210 зернового поля. В отношении цифрового фотографического устройства речь может идти, например, о единичной цифровой камере или цифровой камере в мобильном телефоне, например смартфоне. Камера 202 фотографирует определенный фрагмент поверхности зернового поля. Фрагмент определяется по существу расстоянием плоскости 204 изображения камеры 202 и углом α 206 поля зрения камеры 202. При фотографировании цифрового изображения плоскость 204 изображения камеры 202, предпочтительным образом, лежит параллельно простирающейся горизонтально 208 через колосья 210 зернового поля плоскости.
На фиг. 3 показано вспомогательное средство для желательного размещения камеры 202 над средней плоскостью 208 колосьев 210 зернового поля. В отношении вспомогательного средства речь может идти о дистанционном элементе 302 между камерой 202 и грузом 304. Дистанционный элемент 302 закреплен как на камере 202, так и на грузе 304. Груз 304 может, например, состоять из шара. Цвет шара 304 должен выбираться так, чтобы он хорошо отличался от цвета колосьев 210 или зернового поля. В качестве дополнительного цвета к цвету спелого или почти спелого зерна в качестве возможности для шара 304 (цветоконтрастный шар) рассматривается синий тон. Дистанционный элемент может быть выполнен в виде нити или нитевидной структуры. За счет этого обеспечивается, что дистанционный элемент 302 по причине действия силы тяжести всегда располагается перпендикулярно средней плоскости 208 колосьев 210 зернового поля. Кроме того, таким образом обеспечивается, что через длину дистанционного элемента 302 в только что описанном размещении и угол поля зрения камеры 202 является легко вычисляемым размер фрагмента зернового поля. При квадратной цифровой фотографии длина а стороны цифрового изображения получалась бы из а=2*L* tan (а/2). При этом L является по существу длиной дистанционного элемента 302 и угол α углом поля зрения камеры 202.
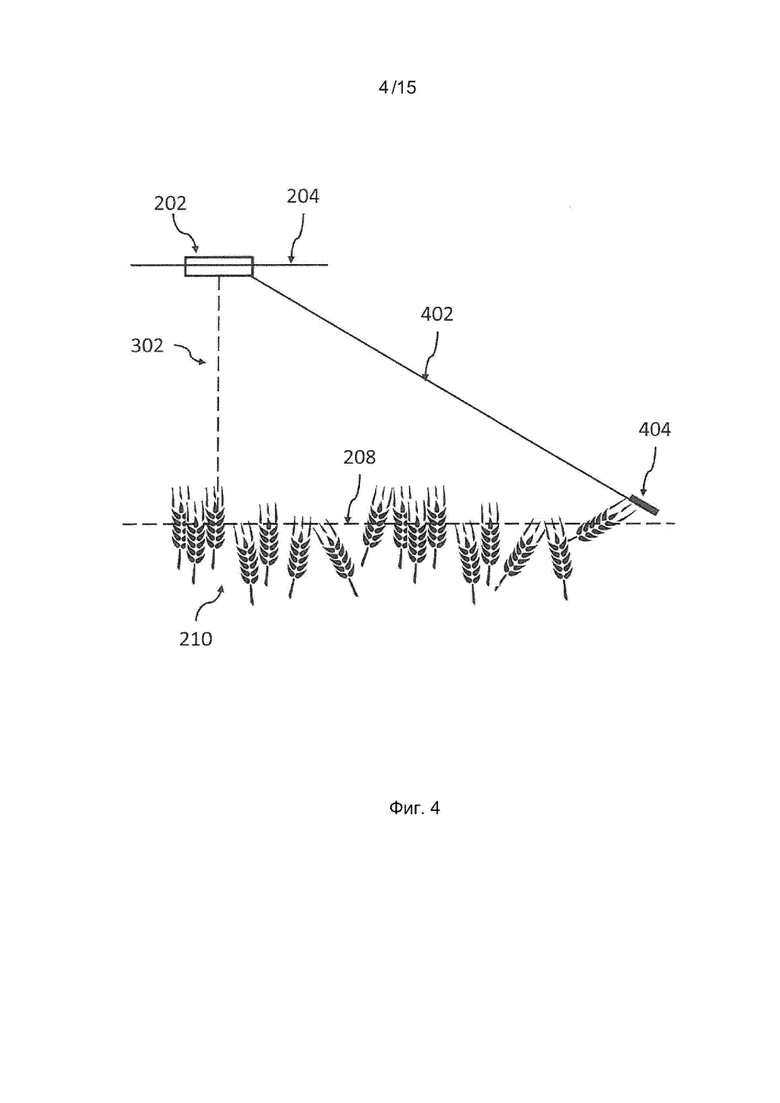
На фиг. 4 показана альтернатива для воспроизводимого установления расстояния камеры 202 от средней плоскости 208 колосьев 210 зернового поля. Камера установлена на конце шеста 402 под заданным углом. В идеальном случае, этот угол больше, чем половина угла поля зрения камеры 202. Когда конец 404 шеста 402 находится на высоте средней плоскости 208 колосьев 210 зернового поля, то расстояние 302, которое теперь не задается дистанционным элементом 302, получается из L=LStab*sin(90-δ), причем δ является углом между шестом 402 и плоскостью 204 изображения камеры. Через это известное расстояние камеры 202 от средней плоскости 208 колосьев 210 зернового поля и угла поля зрения камеры 202 может, как описано выше, определяться площадь, которая соответствует цифровой фотографии камеры 202.
Запуск цифрового фотографирования может осуществляться разным образом. С одной стороны, можно встроить в рукоятку 204 шеста 402 спусковую кнопку. Однако при этом варианте может быть затруднительным сориентировать камеру 202 так, чтобы она располагалась параллельно средней плоскости 208 колосьев 210. Более элегантным было бы решение, при котором фотографирование запускается автоматически, как только плоскость 204 изображения располагается горизонтально после того, как был послан сигнал 204 готовности к запуску камеры 202. За счет этого может гарантироваться параллельность плоскости 204 изображения и средней плоскости 208 колосьев 210. Установление горизонтальной ориентации плоскости 204 изображения может быть обнаружено посредством датчиков ускорения (или других датчиков) камеры.
На фиг. 5 показана приведенная в качестве примера фотография 500 фрагмента зернового поля. Посредством описанными выше в связи с фигурами 2-4 способов или посредством сравнимых способов может быть определен размер площади зернового поля, который соответствует цифровой фотографии. На приведенной в качестве примера цифровой фотографии 500 хорошо видны колосья 502. Кроме того, видно, что те колосья 502, которые расположены в центре изображения, сфотографированы под другим углом, чем те колосья 502, которые расположены на наружных областях фотографии 500. Это следует из простых оптических соображений. Этот эффект может компенсироваться посредством коэффициента площади, который уменьшается к краям цифровой фотографии 500. Кроме того, на фиг. 5 можно увидеть, что отдельные колосья перекрываются. Сообразно этому число имеющихся на фотоснимке колосьев не может определяться, например, путем установления числа взаимосвязанных площадей с одинаковыми значениями яркости или одинаковыми текстурами. Поэтому согласно изобретению сначала определяют общую площадь колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, а в следующем шаге с помощью типичного размера колоса определяют число имеющихся на цифровом изображении колосьев. Информация о типичном размере колоса на цифровом изображении обеспечивается первым калибровочным коэффициентом, который обычно определяют опытным путем.
Из определения площади, которая занимается колосьями 502 на фотографии 500, экстраполяцией может определяться урожайность всего поля.
Предпочтительным образом, для экстраполяции на урожайность поля учитывают массу зерен колоса 502. На следующих фигурах будет пояснено, как такой массы зерен может быть также определен с помощью дополнительных цифровых фотографий отдельного колоса.
На фиг. 6 показана блок-схема примера осуществления расширенного способа 600 определения общего числа зерен колоса стебля. При этом способ содержит сначала обеспечение 602 цифрового изображения колоса в виде уступов стержня колоса. При этом колос во время фотографирования должен находиться на цифровом изображении перед эталонной картой в качестве заднего плана. Эталонная карта по практическим причинам, в идеальном случае, имеет дополнительный цвет (например, синий) к типичному цвету колоса (желтоватый).
В качестве дальнейшего шага способ содержит определение 604 длины колоса вдоль продольной оси колоса путем отделения пикселей изображения цифрового изображения колоса от заднего плана. Предпочтительным образом, это отделение может происходить посредством способа цифровой гистограммы.
Таким образом, взаимосвязанные площади зерен могут различаться от заднего плана эталонной карты. Дополнительно, способ в этом шаге содержит сравнение 606 координат пикселей на одном конце колоса с координатами пикселей колоса на противоположном конце колоса в продольном направлении колоса с помощью меток изображения на эталонной карте. Посредством имеющейся на эталонной карте шкалы может легко определяться длина колоса. Для этого должны просто вычитаться друг из друга соответствующие координаты y.
Является предпочтительным, когда изображение колоса перед определением длины подвергают преобразованию, которое компенсирует перспективные искажения и наклонные положения.
Затем в способе может предприниматься определение 608 числа уступов стержня колоса путем способа сравнения с эталоном, за которым следует определение (шаг 610) числа зерен колоса путем умножения установленных уступов стержня на коэффициент, который указывает на число зерен на уступ стержня и, например, имеет равное 4 значение.
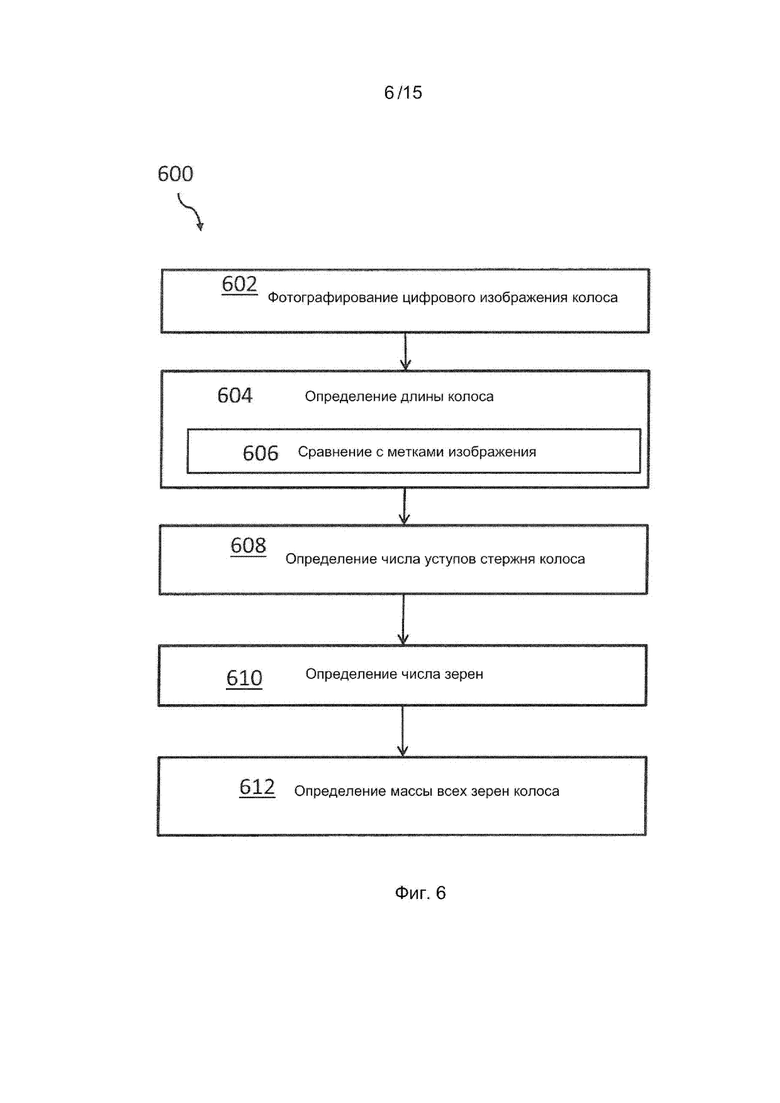
На последнем шаге 612 способа достигается определение массы всех зерен колоса путем умножения определенного числа зерен на калибровочный коэффициент. Калибровочный коэффициент может учитывать несколько переменных параметров влияния. За счет непрерывного сравнения определенной способом массы зерна с определенной взвешиванием массы зерна в способе может быть осуществлен непрерывный и компьютеризированный процесс обучения.
На фиг. 7 показана первая часть блок-схемы близкого к реализации варианта осуществления предлагаемого способа. Сначала получают цифровое изображение колоса 708 вместе с эталонной картой. Корректировка 702 геометрии также содержит обнаружение 704 углов цветной площади на эталонной карте. Затем происходит преобразование 706 перспективы и фрагмента 710 изображения, так что площади за пределами цветного заднего плана с лежащими на нем колосьями игнорируются.
Полученный таким образом фрагмент 710 изображения передается функции 712 обнаружения колосьев. Фактическое обнаружение колосьев происходит посредством анализа 714 посредством способа цветовой гистограммы, чтобы различить друг от друга пиксели колосьев и цветного заднего плана (716 сегментирование переднего/заднего плана). Затем обнаруженный соответствующий колосу объект маскируют 718. При этом маскированном изображении обнаруженные пиксели изображения заднего плана могут быть представлены в виде логического "0".
В следующем блоке 722 обработки происходит предварительная обработка колосьев. Она может содержать шаг 724 оптимизации освещенности и контрастности. В качестве дальнейшего может происходить преобразовательное спрямление 726 колосьев и дальнейшее уменьшение подлежащего обработке фрагмента изображения. За счет оптического удаления остей (шаг 726) становится возможным распознавание вида колоса. В идеальном случае, в случае вида колоса речь идет о виде уступов стержня. Дальнейшая обработка полученного цифрового изображения происходит согласно фиг. 8.
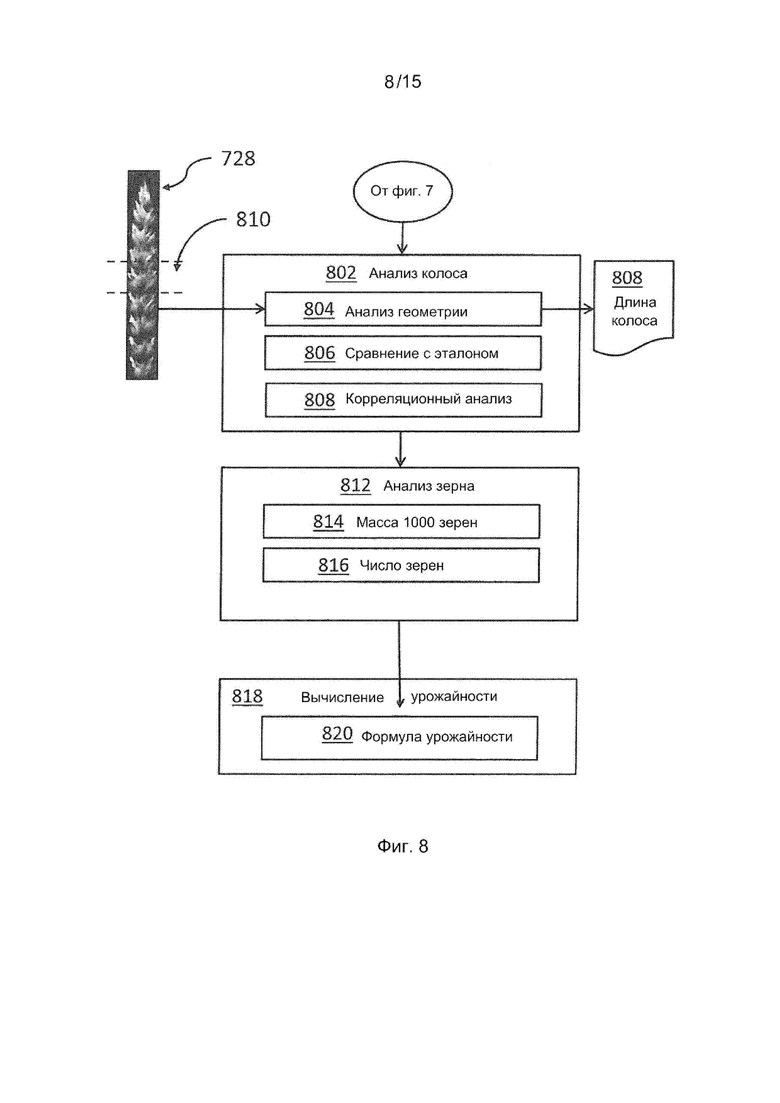
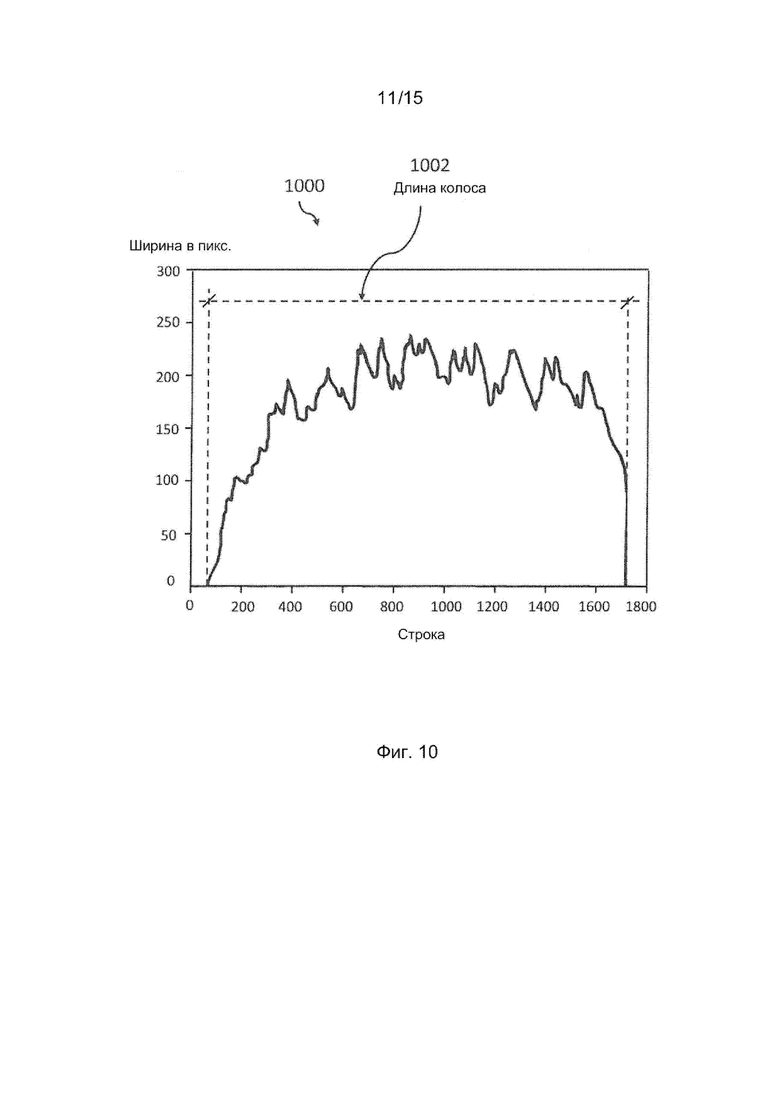
На фиг. 8 показана вторая часть блок-схемы близкого к реализации варианта осуществления предлагаемого способа. Здесь происходит фактический анализ 802 колоса. Для этого сначала необходим анализ 804 геометрии, результатом которого является определение 808 длины колоса. Сравнение самого верхнего пикселя колоса с отображенной и опознанной шкалой или известной величиной цветной поверхности эталонной карты, при известных условиях с помощью угловых меток, делает возможным в связи с расстоянием до основания колоса на внутреннем конце колоса определение длины колоса в продольном направлении, как это показано на фиг. 9.
В последующем способе 806 сравнения с эталоном среднюю выбранную область 810 колоса 728 в представленном к этому моменту времени виде попиксельно смещают в вертикальном направлении вдоль продольной оси колоса 728. При этом определяют соответственно коэффициент подобия, который определяют математически посредством функции 810 взаимной корреляции между функцией эталона и функцией изображения. За счет периодического рисунка структуры колоса в ходе функции 810 взаимной корреляции получаются четкие значения максимумов, которые расположены на периодическом расстоянии друг от друга. Результат такого корреляционного анализа 808 показан на фиг. 10, который дает длину периода и, за счет этого, расстояние уступов стержня относительно друг друга. Отношение длины 808 колоса к длине периода приводит к очень точной мере для половинного числа уступов стержня, так как периодичность уступов стержня выражена очень четко и с неизменным расстоянием.
Затем на заложенном таким образом основании происходит анализ 812 зерна с определением 816 числа зерен и определением 814 массы 1000 зерен. В заключение может добавляться вычисление 818 урожайности всего поля или его частичной области посредством формулы 820 урожайности. Масса 1000 зерен, называемая также массой тысячи зерен (TKG), является обычным расчетным значением для оценки урожайности в сельскохозяйственных кругах и указывает на массу 1000 зерен одной партии зерна. Она может вычисляться из массы зерна одного колоса и определенного числа зерен колоса.
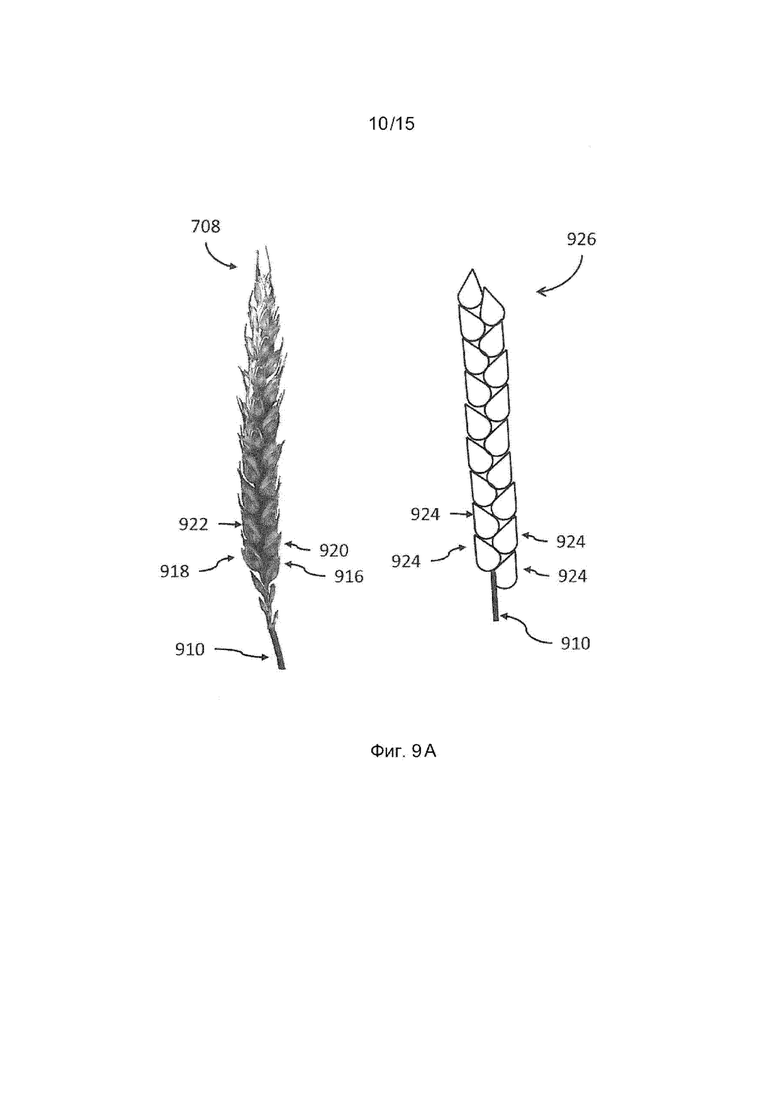
На фиг. 9 показан абстрактно изображенный колос 708 и пример цветной поверхности 902 (на черно-белом изображения не различается) эталонной карты (которая может быть больше, чем поверхность 902) вместе с лежащим на ней колосом 708. Цветная поверхность 902 имеет метки изображения в виде шкалы 904, а также, например, угловые метки 914 изображения. Угловые метки 914 изображения могут иметь различное проявление.
В продолжении зерен 908 символически показаны ости 906, которые могут быть разной длины в зависимости от сорта зерновой культуры. Кроме того, еще показан участок стебля 910, который для представленного способа имеет значение только для распознавания нижней части колоса.
Колос 708 на цветной поверхности 902 эталонной карты должен быть ориентирован так, что продольная ось 912 колоса 708 ориентирована наиболее параллельно боковой линии цветной поверхности 902. Типично изогнутая форма колоса 708 за счет преобразования изображения колоса 708 может быть преобразована так, что продольная ось колоса будет действительно ориентирована параллельно боковой линии цветной поверхности 902 эталонной карты. Эталонная карта типично немного больше, чем содержащаяся на ней цветная поверхность 902, цвет которой, например, является "синим".
Разумеется, фактическое изображение колоса 708 представляет собой взаимосвязанную область (например, 720, 728, показанную на фиг. 7). Использованный здесь вид изображения колоса 708 должен пониматься только как изображение ориентации колоса 708 относительно эталонной карты.
На фиг. 9 показано изображения колоса 708 и вид 926 уступов стержня колоса. На изображении 708 колоса четко видны разные зерна 916, 918, 920, 922 в нижней области колоса, а также стебель 910. Соответственно на абстрактной форме колосьев на правой стороне фиг. 9а видны разные ступени 424 стержня колоса 708.
На фигуре 10 показан приведенный в качестве примера график 1000 для определения длины колоса. При этом видно, что на каждую строку пикселей (ось х), которая относится к колосу, нанесена ширина колоса (ось у). Отдельные относительные максимумы, или тесно расположенные вместе группы относительных максимумов, относятся соответственно к одному уступу стержня. Путем простого подсчета относительных максимумов или групп относительных максимумов можно узнать число уступов стержня. Из начала пикселей колоса при приблизительно 60 строке и конца пикселей колоса при приблизительно 1710 строке с помощью шкалы эталонной карты или за счет значения ширины отдельного пикселя или строки пикселя получается длина 1002 колоса.
На фиг. 11 показан приведенный в качестве примера график 1100 функции взаимной корреляции для определения числа уступов стержня на основании способа сравнения с эталоном. На оси х показано соответствующее положение эталона (рисунок из середины колоса) относительно значения корреляции (значения подобия) эталона относительно всего колоса. В центре изображения, примерно при значении пикселя 525, ср. с 1102/макс. совпадение, видно максимальное значение корреляции, практически равное 1. В этом месте эталон находится точно на своем исходном месте. Из расстояний между относительными максимумами изображения может быть определена длина 1104 периода, которая соответствует расстоянию отдельных уступов стержня друг от друга. Из определенной длины колоса и средней определенной длины 1104 периода путем деления и округления может быть также вычислено число уступов стержня.
Кроме того, на этом месте следует указать на факультативную форму способа 600 (также в качестве замены или дополнения к частичному способу согласно фиг. 6-11) определения общего числа зерен колоса стебля. Также согласно этому варианту осуществления способ начинается с обеспечения цифрового изображения колоса. В этом случае фотографирование колоса выполняют в цветочном виде, то есть в виде, в котором хорошо видны зерна колоса, перед эталонной картой. За этим следует определение площади цветового вида колоса путем отделения пикселей изображения цифрового изображения колоса от заднего плана, например, посредством способа цветовой гистограммы, и сравнение занимаемой колосом площади с метками изображения на эталонной карте. При этом в отношении меток изображения речь может идти о шкале эталонной карты или об известных расстояниях между другими метками изображения на эталонной карте. Затем происходит определение массы всех зерен колоса путем умножения установленной площади колоса на калибровочный коэффициент. Оказалось, что имеется ярко выраженная прямая корреляция между площадью проекции колоса в цветочном виде и числом зерен колоса. Это явление используется здесь для того, чтобы просто и элегантно определять массы зерен колоса. Также и этот факультативный способ может особенно хорошо использоваться, начиная со стадии роста, которая больше 60 ВВНС. Впрочем, он также действует уже при меньшей значениях ВВНС.
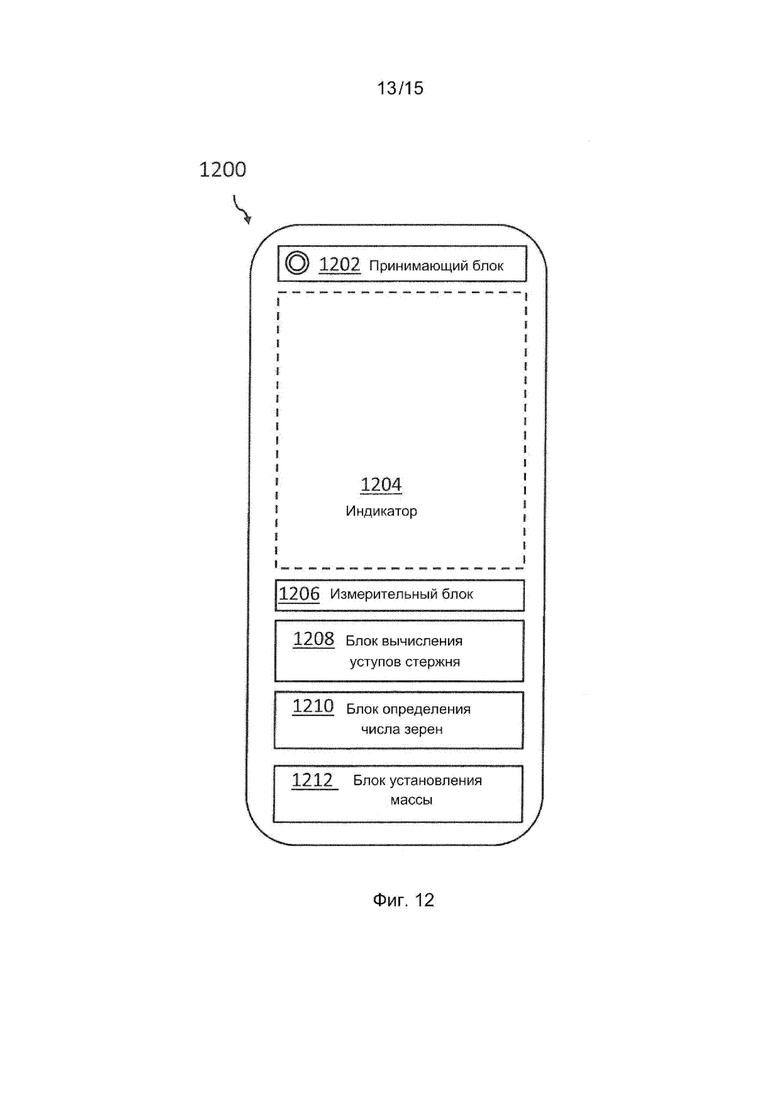
На фиг. 12 показана блок-схема системы для определения общего числа зерен колоса стебля. Система имеет принимающий блок 1202 для приема цифрового изображения колоса в боковом виде колоса. Когда система для определения общего часта зерен интегрирована в мобильное устройство, речь идет в отношении приемного блока о цифровой камере. В другом варианте осуществления цифровое изображение колоса фотографируют цифровой камерой и передают, в некоторых случаях, на принимающий блок 1202. При этом колос на цифровом изображении фотографируют перед эталонной картой в качестве заднего плана. Факультативно, система может содержать индикаторный блок 1204. Кроме того, система имеет измерительный блок 1206. Он выполнен для определения длины колоса вдоль продольной оси колоса путем отделения пикселей изображения цифрового изображения колоса от заднего плана. Кроме того, измерительный блок 806 выполнен для сравнения координат пикселей на одном конце колоса с координатами пикселей колоса на противоположном конце колоса в продольном направления колоса с метками изображения на эталонной карте.
Дополнительно, система содержит блок 1208 вычисления уступов стержня, который выполнен для определения числа уступов стержня колоса посредством способа сравнения с эталоном, и блок 1210 определения числа зерен, который выполнен для определения числа зерен колоса путем умножения установленных уступов стержня на коэффициент.
Наконец, в системе также предусмотрен блок 1212 установления массы, который выполнен для определения массы всех зерен колоса путем умножения определенного числа зерен на калибровочный коэффициент.
Как уже описано выше, система может быть частью системы сервера, который принимает цифровую фотографию или цифровые фотографии от цифровой камеры, например смартфона. С другой стороны также можно, при соответствующей вычислительной мощности, интегрировать всю систему в мобильную систему, например смартфон или цифровую камеру.
Эта система согласно фиг. 12 может быть интегрирована с системой 1300 для анализа урожайности зернового поля, которая показана на фиг. 13. Эта система содержит цифровую камеру 1302, которая размещена на заданном расстоянии над средней плоскостью колосьев зернового поля, причем цифровая камера выполнена для фотографирования цифрового изображения фрагмента зернового поля зернового поля с помощью размещенной цифровой камеры, которая может быть такой же, как показанная на фиг. 12. При этом средняя плоскость колосьев и плоскость изображения цифровой камеры расположены параллельно друг другу. Также индикатор/экран 1304 может быть идентичным индикаторному устройству 1204 согласно фиг. 12.
Система 1300 для прогнозирования урожайности также содержит блок 1306 определения частичной площади для определения площади
сфотографированного фрагмента зернового поля из заданного расстояния и угла поля зрения цифровой камеры, а также блок 1308 определения площади колосьев для определения общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения посредством алгоритма различения между пикселями изображения колосьев в отличие от других пикселей изображения, которые не относятся к колосьям.
Наконец, система 1300 имеет модуль 1310 определения урожайности для определения урожайности поля из общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и первого калибровочного коэффициента.
Варианты осуществления изобретения могут быть реализованы практически вместе со всеми видами компьютеров, прежде всего, также со смартфоном, независимо от платформы, которые используются для хранения и выполнения программного кода. На фиг. 14 в качестве примера приведена компьютерная система 1400, которая пригодна для выполнения программного кода, который имеет отношение к предлагаемому способу.
В отношении компьютерной системы 1400 речь идет о примере подходящей компьютерной системы, и здесь не предусмотрено, что она будет представлять собой ограничение объема использования или функциональности описанного здесь изобретения. Напротив, компьютерная система 1400 пригодна для реализации описанных здесь примеров осуществления. В компьютерной системе 1400 содержатся компоненты, которые могут работать с большим числом других компьютерных системных периферий и/или конфигураций.
Примеры известных компьютерных систем, периферий и/или конфигураций, которые могут быть пригодными, чтобы работать с компьютерной системой 1400, содержат, не ограничиваясь на этом, планшетные компьютеры, ноутбуки и/или другие мобильные вычислительные системы и/или смартфоны, а также микропроцессорные системы, основанные на микропроцессорах системы, программируемую бытовую электронику или также цифровые камеры или PDA (персональные цифровые помощники).
Компьютерная система 1400 описана здесь в общем контексте выполняемых компьютерной системой команд. При этом речь может идти также о программных модулях, который выполняются компьютерной системой 1400. В общем, программные модули содержат программные циклы, частичные программы, объекты, компоненты, логику обработки и/или логику принятия решений, структуры данных и т.д., которые выполняют определенную задачу или представляют собой определенный абстрактный тип данных.
Как уже упоминалось, компьютерная система 1400 может быть реализована в виде вычислительной системы "общего назначения". При этом компоненты компьютерной системы 1400, не ограничиваясь этим, содержат один или несколько обрабатывающих блоков 1402 (CPU), запоминающую систему 1404 и системную шину 1418, которая соединяет разные компоненты системы, включая главное запоминающее устройство 1404 с процессором 1402.
Компьютерная система 1400 также содержит различные машиночитаемые носители информации. Такие носители информации включают в себя все носители информации, к которым может получить доступ компьютерная система 1400. К ним относятся как энергозависимые, так и энергонезависимые носители информации, которые могут быть как съемными, так и жестко встроенными.
Главное запоминающее устройство 1404 может также содержать машиночитаемые носители информации в виде энергозависимых запоминающих устройств. Это может быть оперативная память (RAM) или также сверхоперативная память. Кроме того, компьютерная система 1400 может содержать съемные и несъемные носители информации. Запоминающая система 1404 может, например, обладать способностью к хранению данных на несъемной микросхеме памяти. К системной шине через один или несколько интерфейсов данных могут быть подключены носители информации 1406. Как более точно описано ниже, запоминающее устройство 1404 содержит по меньшей мере один программный продукт, который содержит несколько (по меньшей мере один) программных модулей, которые сконфигурированы так или конфигурируют компьютерную систему так, что могут выполняться функции вариантов осуществления изобретения.
Программа, которая содержит несколько программных модулей, может, например, храниться в запоминающем устройстве 1404, также как операционная система, одна или несколько прикладных программ, программные модули и/или программные данные.
Компьютерная система 1400 может, кроме того, обмениваться данными с несколькими внешними устройствами, такими как клавиатура 1408, указывающее устройство 1440 ("мышь"), устройство отображения (не показано) и т.д. Эти устройства могут быть, например, объединены в сенсорном экране 1412 для возможности взаимодействия с компьютерной системой 1400. Компьютерная система 1400 может также иметь акустическое устройство 1416 ввода/вывода. Кроме того, могут иметься дополнительные соединения, чтобы связываться с одним или несколькими другими устройствами для обработки данных (модем, сетевые соединения и т.д.). Кроме того, такая связь может происходить через интерфейс ввода/вывода (I/O). Кроме того, компьютерная система 1400 через адаптер 1414 может связываться через одну или несколько сетей, таких как, например, LAN (локальная вычислительная сеть), WAN (глобальная сеть) и/или через открытую (мобильную) сеть, например Интернет. Как показано, сетевой адаптер 1414 связывается с другими компонентами компьютерной системы 1400 через системную шину 1418. Кроме того, следует отметить, что, хотя это не показано, могут использоваться в связи с компьютерной системой 1400 также другие аппаратные компоненты и/или программные компоненты. Это относится, например, к микрокоду, драйверам устройств, избыточно обрабатывающим блокам.
Кроме того, к шинной системе 1418 может быть подключена система 1200 для определения массы всех зерен колоса стебля или отдельная или встроенная система 1300 для прогнозирования урожайности зернового поля. Таким образом, компьютерная система или система 1300 для определения полевого урожая (прогнозирования урожайности) могут принимать цифровые фотографии, проводить определения массы одного колоса и, таким образом, прогнозирование урожайности воля, и передавать результат назад на мобильное устройство, с помощью которого были сделаны цифровые фотографии. В одном особом варианте осуществления система 1200 и/или 1300 могут быть также встроены в мобильную компьютерную систему (например, высокопроизводительный смартфон).
Описание разных вариантов осуществления настоящего изобретения были использованы для иллюстративных целей. Оно не предназначено для ограничения объема идеи изобретения. Специалисту открываются возможности дальнейших модификаций и изменений без отклонения от сути изобретения.
Настоящее изобретение может быть реализовано как система, способ и/или компьютерный программный продукт и/или их сочетание. Компьютерный программный продукт может содержать машиночитаемый носитель информации, который содержит машиночитаемые программные команды, чтобы заставить компьютер реализовать аспекты настоящего изобретения.
При этом носитель информации может основываться на электронных, магнитных, электромагнитных волнах, инфракрасном свете или полупроводниковых системах, которые пригодны также для пересылки. К ним относятся полупроводниковые запоминающие устройства, память с произвольной выборкой (RAM), а также постоянное запоминающее устройство (ROM). Машиночитаемые программные команды, которые описаны здесь, могут загружаться на соответствующие компьютерные системы потенциальным провайдером услуг через мобильное сетевое соединение или стационарную сеть.
Машиночитаемые программные команды для выполнения операций настоящего изобретения могут содержать любые виды машинозависимых или машинонезависимых команд, микрокод, фирменное программное обеспечение, устанавливающие статус данные или исходный код или объектный код, который написан в любом сочетании на одном или нескольких языках программирования. В отношении языков программирования речь может идти о С++, Java или подобных современных языках программирования или обычных процедурных языках программирования, таких как язык программирования "С" или подобных языках программирования. Машиночитаемые программные команды могут полностью выполняться на компьютерной системе. В других вариантах осуществления электронные схемы, такие как, например, программируемые логические модули, программируемые пользователем матрицы логических элементов (PGA) или программируемые логические матрицы (PLA), могут выполнять команды с использованием информации о статусе машиночитаемых программных команд, чтобы индивидуализировать электронные схемы для выполнения аспектов настоящего изобретения.
Аспекты настоящих изобретений в данном документе представлены с помощью структурных схем и/или блок-схем способов, устройств (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Разумеется, что каждый блок представленной структурной схемы и/или блок-схемы, а также сочетания блоков в структурных схемах и/или блок-схемах могут быть реализованы посредством машиночитаемых программных команд.
Эти машиночитаемые программные команды могут предоставляться в распоряжение процессору "компьютера общего назначения" или специальному аппаратному обеспечению компьютера, чтобы создать машину, так что команды, которые выполняются соответствующим процессором, создают средства для реализации функций/действий, которые представлены в соответствующих структурных схемах и/или блок-схемах или блоках. Эти машиночитаемые программные команды могут храниться на машиночитаемых носителях информации, так что они заставляют компьютер или программируемое устройство для обработки данных выполнять сохраненные на носителе информации команды посредством соответствующего процессора так, чтобы выполнялись аспекты или действия описанного способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕТОДИКА ДИСТАНЦИОННОЙ РЕКОГНОСЦИРОВОЧНОЙ ДИАГНОСТИКИ ОБЕСПЕЧЕНИЯ РАСТЕНИЙ АЗОТОМ (С ПОМОЩЬЮ МУЛЬТИСПЕКТРАЛЬНОЙ КАМЕРЫ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ) | 2018 |
|
RU2693255C1 |
| СПОСОБ ОЦЕНКИ ПОТЕНЦИАЛЬНОЙ ПРОДУКТИВНОСТИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАСТЕНИЙ, ПРЕИМУЩЕСТВЕННО ОЗИМЫХ ЗЕРНОВЫХ КОЛОСОВЫХ КУЛЬТУР, ПРИ ВОЗДЕЛЫВАНИИ В УСЛОВИЯХ РЕЗКО КОНТИНЕТАЛЬНОГО КЛИМАТА | 2003 |
|
RU2248690C2 |
| СПОСОБ ОЦЕНКИ ПОТЕНЦИАЛЬНОЙ ПРОДУКТИВНОСТИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАСТЕНИЙ, ПРЕИМУЩЕСТВЕННО КОЛЛЕКЦИОННЫХ СОРТОВ ЯРОВЫХ ЗЕРНОВЫХ КОЛОСОВЫХ КУЛЬТУР, ПРИ ВОЗДЕЛЫВАНИИ В УСЛОВИЯХ РЕЗКО КОНТИНЕНТАЛЬНОГО КЛИМАТА | 2005 |
|
RU2294091C1 |
| МОНИТОРИНГ КАЧЕСТВА ЗЕРНА | 2015 |
|
RU2720867C2 |
| Способ определения стекловидности зерна и система для его реализации | 2020 |
|
RU2744342C1 |
| ОБНАРУЖЕНИЕ БОЛЕЗНЕЙ РАСТЕНИЙ С ПОМОЩЬЮ МНОГОСТАДИЙНОГО, МНОГОМАСШТАБНОГО ГЛУБОКОГО ОБУЧЕНИЯ | 2019 |
|
RU2820495C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДУКЦИОННЫМИ ПРОЦЕССАМИ ПРИ ВОЗДЕЛЫВАНИИ ОЗИМЫХ ЗЕРНОВЫХ КУЛЬТУР В УСЛОВИЯХ ЗАСУШЛИВОГО КЛИМАТА | 2002 |
|
RU2228607C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА УБРАННОЙ МАССЫ | 2008 |
|
RU2483522C2 |
| СЕГМЕНТАЦИЯ И ПРОГНОЗИРОВАНИЕ ВРЕМЕННЫХ ПАТТЕРНОВ ШЛЕЙФОВ НИЗКОГО УРОВНЯ | 2020 |
|
RU2783420C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЪЕМА ЗЕРНОВОЙ СМЕСИ В ЗЕРНОУБОРОЧНОЙ ТЕХНИКЕ | 2022 |
|
RU2788316C1 |








Изобретение относится к способу прогнозирования урожайности зернового поля. Способ включает следующие операции: размещение цифровой камеры на заданном расстоянии над средней плоскостью колосьев зернового поля, фотографирование цифрового изображения фрагмента зернового поля зернового поля, определение площади сфотографированного фрагмента зернового поля, определение общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения. Затем осуществляют определение урожайности поля из общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и первого калибровочного коэффициента. Изобретение касается также соответствующей системы для прогнозирования урожайности зернового поля и машиночитаемого носителя информации, содержащего машиночитаемые программные команды для выполнения действий описанного способа. Техническим результатом является повышение точности прогноза урожайности поля. 3 н. и 13 з.п. ф-лы, 15 ил.
1. Способ прогнозирования урожайности зернового поля, причем способ содержит:
- размещение цифровой камеры на заданном расстоянии над средней плоскостью колосьев зернового поля,
- фотографирование цифрового изображения фрагмента зернового поля зернового поля с помощью размещенной цифровой камеры, причем средняя плоскость колосьев и плоскость изображения цифровой камеры расположены параллельно друг другу,
- определение площади сфотографированного фрагмента зернового поля из заданного расстояния и угла поля зрения цифровой камеры,
- определение общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения посредством алгоритма различения между пикселями изображения колосьев в противоположность другим пикселям изображения, которые не относятся к колосьям, и
- определение урожайности поля из общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и первого калибровочного коэффициента, причем калибровочный коэффициент содержит информацию о среднем размере колоса на цифровом изображении и по меньшей мере одну зависимость в отношении одного из факторов, выбранного из группы, состоящей из сорта, стадии роста, метеорологических условий, географического местоположения и состояния подкормки.
2. Способ по п. 1, причем алгоритм различения между пикселями изображения колосьев в противоположность другим пикселям изображения является алгоритмом локальных бинарных шаблонов.
3. Способ по п. 1 или 2, причем алгоритм различения между пикселями изображения колосьев в противоположность другим пикселям изображения является способом анализа текстуры изображения.
4. Способ по одному из предшествующих пунктов, причем алгоритм различения между пикселями изображения колосьев в противоположность другим пикселям изображения является фильтром различения яркости.
5. Способ по одному из предшествующих пунктов, причем заданное расстояние между цифровой камерой и средней плоскостью колосьев зернового поля определяют посредством дистанционного элемента, причем дистанционный элемент состоит из гибкого элемента, например, веревки, один конец которого закреплен на цифровой камере, а другой конец которого имеет цветоконтрастный шар, который размещают в средней плоскости колосьев зернового поля.
6. Способ по одному из пп. 1-4, причем заданное расстояние между цифровой камерой и средней плоскостью колосьев зернового поля определяют посредством дистанционного элемента, причем цифровую камеру закрепляют на одном конце дистанционного элемента под предварительно определенным углом, который не равен 90 градусам, причем другой конец дистанционного элемента размещают в средней плоскости колосьев зернового поля, и причем цифровое изображение фотографируют, когда плоскость изображения цифровой камеры ориентирована горизонтально.
7. Способ по одному из предшествующих пунктов, причем способ содержит шаг:
- определения числа колосьев на цифровом изображении и/или фрагменте зернового поля с использованием первого калибровочного коэффициента.
8. Способ по одному из предшествующих пунктов, причем определение общей площади зерен на цифровом изображении в сравнении с общей площадью цифрового изображения также содержит:
- умножение площадей колосьев на поверхностный коэффициент, величина которого уменьшается от центра цифрового изображения к краю.
9. Способ по одному из предшествующих пунктов, причем среднюю массу зерна определяют посредством способа определения массы всех зерен колоса стебля, содержащего:
- обеспечение цифрового изображения колоса в боковом виде колоса, причем колос при фотографировании цифрового изображения находится перед эталонной картой в качестве заднего плана,
- определение длины колоса вдоль продольной оси колоса путем отделения пикселей изображения цифрового изображения колоса от заднего плана, и сравнения координат пикселей на одном конце колоса с координатами пикселей колоса на противоположном конце колоса в продольном направлении колоса с метками изображения на эталонной карте,
- определение числа уступов стержня колоса посредством способа сравнения с эталоном,
- определение числа зерен колоса путем умножения установленных уступов стержня на коэффициент, и
- определение массы всех зерен колоса путем умножения определенного числа зерен на второй калибровочный коэффициент.
10. Способ по п. 9, причем способ сравнения с эталоном содержит:
- попиксельное смещение содержащего выбранную среднюю область колоса эталона изображения по всему колосу в продольном направлении колоса и соответствующее определение коэффициента подобия эталона изображения с соответствующим перекрытым участком колоса, за счет чего возникают регулярные относительные максимумы в х-у-представлении, причем значение х является величиной смещения эталона изображения, а ось у представляет коэффициент подобия, и
- определение числа стержней из х-у-представления.
11. Способ по п. 9 или 10, причем определения числа стержней из х-у-представления содержит:
- установление средней длины периода из расстояний между относительными максимумами относительно друг друга, и
- определение числа стержней путем деления длины колоса на длину периода, и
- определение числа относительных максимумов.
12. Способ по одному из пп. 1-8, причем среднюю массу зерна определяют посредством способа определения массы зерна для определения массы всех зерен колоса стебля, причем способ определения массы зерна содержит:
- обеспечение цифрового изображения колоса в цветочном виде колоса перед эталонной картой,
- установление площади цветочного вида колоса путем отделения пикселей изображения цифрового изображения колоса от заднего плана посредством способа цветовой гистограммы, и сравнение занимаемой колосом площади с метками изображения на эталонной карте,
- определение массы всех зерен колоса путем умножения установленной площади колоса на второй калибровочный коэффициент.
13. Способ по одному из пп. 9-12, причем второй калибровочный коэффициент содержит по меньшей мере одну зависимость относительно одного из факторов, выбранного из группы, состоящей из сорта колоса, стадии роста колоса, метеорологических условий, географического местоположения и состояния подкормки.
14. Система для прогнозирования урожайности зернового поля, причем система содержит:
- цифровую камеру, которая размещена на заданном расстоянии над средней плоскостью колосьев зернового поля, причем цифровая камера выполнена для фотографирования цифрового изображения фрагмента зернового поля зернового поля с помощью размещенной цифровой камеры, причем средняя плоскость колосьев и плоскость изображения цифровой камеры расположены параллельно друг другу,
- блок определения частичной площади для определения площади сфотографированного фрагмента зернового воля из заданного расстояния и угла поля зрения цифровой камеры,
- блок определения площади колосьев для определения общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения посредством алгоритма различения между пикселями изображения колосьев в противоположность другим пикселям изображения, которые не относятся к колосьям, и
- модуль определения урожайности для определения урожайности поля из общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и калибровочного коэффициента, причем калибровочный коэффициент содержит информацию о среднем размере колоса на цифровом изображении и по меньшей мере одну зависимость в отношении одного из факторов, выбранного из группы, состоящей из сорта, стадии роста, метеорологических условий, географического местоположения и состояния подкормки.
15. Система по п. 14, причем система также содержит:
- приемно-передающий блок, который выполнен для пересылки сфотографированного цифрового изображения фрагмента зернового поля в вычислительный центр, который содержит блок определения частичной площади, блок определения общей площади и модуль определения урожайности.
16. Машиночитаемый носитель информации, в котором хранятся программные элементы для определения массы всех зерен колоса стебля, которые, при выполнении их процессором, заставляют процессор осуществлять способ со следующими шагами:
- фотографирование цифрового изображения фрагмента зернового поля зернового поля с помощью цифровой камеры, причем средняя плоскость колосьев и плоскость изображения цифровой камеры расположены параллельно друг другу, и причем цифровая камера размещена на заданном расстоянии над средней плоскостью колосьев зернового поля,
- определение площади сфотографированного фрагмента зернового поля из заданного расстояния и угла поля зрения цифровой камеры,
- определение общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения посредством алгоритма различения между пикселями изображения колосьев в противоположность другим пикселям изображения, которые не относятся к колосьям, и
- определение урожайности поля из общей площади колосьев на цифровом изображении в сравнении с общей площадью цифрового изображения, определенной площади сфотографированного фрагмента зернового поля, средней массы зерна колоса, общей площади поля, и калибровочного коэффициента, причем калибровочный коэффициент содержит информацию о среднем размере колоса на цифровом изображении и по меньшей мере одну зависимость в отношении одного из факторов, выбранного из группы, состоящей из сорта, стадии роста, метеорологических условий, географического местоположения и состояния подкормки.
| US 2014176705 A, 26.06.2014 | |||
| CN 101944231 A, 12.01.2011 | |||
| KR 1020140125229 A, 28.10.2014 | |||
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМЕЛЬ | 2005 |
|
RU2308679C2 |

