[0001] ОБЛАСТЬ ТЕХНИКИ
[0002] Предложенное техническое решение относится к способам контроля расхода энергии транспортным средством и может быть использовано в транспортной промышленности.
[0003] УРОВЕНЬ ТЕХНИКИ
[0004] Известен способ оценки эффективности использования топлива транспортным средством, описанный в патенте KR 101526431 В1, опубликованном 05.06.2015 на 12 листах (Д1). Известный из Д1 способ реализуется устройством для оценки эффективности использования топлива транспортного средства, содержащим: блок сбора данных, собирающий информацию о вождении, информацию о состоянии и идентификационную информацию от множества транспортных средств, включая первое транспортное средство; блок вычисления индекса движения, вычисляющий каждый индекс движения транспортных средств на основании информации о вождении; средство извлечения аналогичной группы, извлекающей подобную группу транспортных средств, аналогичных первому транспортному средству, из транспортных средств на основе индекса движения и информации о состоянии; средство оценки эффективности использования топлива, оценивающий эффективность использования топлива первого транспортного средства на основе информации о вождении и идентификационной информации в аналогичной группе; и средство руководства по управлению транспортным средством, направляющую способ управления транспортным средством или способ улучшения вождения для первого транспортного средства на основе результата оценки эффективности использования топлива. Согласно изобретения топливная эффективность транспортного средства может быть точно оценена с учетом привычек вождения водителя и текущего состояния транспортного средства. Кроме того, способ управления транспортным средством и способ вождения, основанные на данных оценки топлива транспортного средства, предоставляются водителю, так что водитель может повысить эффективность управления и управления транспортным средством и может снизить затраты на техническое обслуживание транспортного средства.
[0005] В известном из Д1 способе не используется информация о конкретном пройденном первым транспортным средством участке пути, что снижает точность оценки предполагаемого расхода топлива. Помимо этого, в известном из Д1 способе используется информация только от транспортных средств, обладающих схожими эксплуатационными характеристиками и схожей моделью вождения водителей, что не позволяет использовать способ в глобальной системе контроля расхода топлива, в которой присутствует множество транспортных средств с различными характеристиками. Помимо этого, известный из Д1 способ используется для выявления операционных проблем транспортных средств, влияющих на уровень потребления топлива и требующих починки или замены каких-либо частей транспортного средства, и не может быть использован для изменения модели движения транспортного средства с целью уменьшения расхода энергии на определенном участке пути. Кроме того, известное из Д1 решение не предоставляет каких-либо специфических или специальных средств и методов для формирования модели движения транспортного средства в городской среде, в частности, когда участок пути содержит обязательные точки децелерации, обусловленные траекториями движения по соответствующим участкам пути, наличием других транспортных средств, в том числе, на других участках пути, прогнозом наличия других транспортных средств, в том числе, на других участках пути, а также обусловленные сигналами инфраструктуры участка пути. Известный из Д1 способ может быть принят в качестве ближайшего аналога заявленного изобретения.
[0006] РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0007] Технической проблемой, решаемой заявленным изобретением, является создание способа, устройства, системы, транспортного средства и машиночитаемого носителя данных, не обладающих недостатками ближайшего аналога и таким образом обеспечивающих формирование точного энергоэффективного трека транспортного средства, позволяющего снизить расход энергии транспортным средством при его движении по участку пути, включающему обязательную точку децелерации, в том числе, по участкам пути, находящимся в городской среде.
[0008] Техническим результатом, достигаемым при реализации заявленного изобретения, является устранение недостатков ближайшего аналога и таким образом снижение расхода энергии транспортным средством при его движении по участку пути, включающему обязательную точку децелерации, в том числе, по участкам пути, находящимся в городской среде, а также повышение безопасности дорожного движения.
[0009] Технический результат достигается за счет того, что обеспечивается исполняемый процессором компьютерного устройства способ формирования энергоэффективного трека эксплуатируемого транспортного средства при движении транспортного средства по участку пути, включающему обязательную точку децелерации, заключающийся, по меньшей мере, в выполнении этапов: этапа сбора первичных данных, заключающегося в получении данных, ассоциированных с первым транспортным средством; данных, ассоциированных с участком пути, который будет пройден первым транспортным средством; и данных, ассоциированных со вторым транспортным средством, причем такое второе транспортное средство является эксплуатируемым транспортным средством и пройдет упомянутый участок пути позже первого транспортного средства; причем упомянутые данные, ассоциированные с участком пути, по меньшей мере, включают данные о точке обязательной децелерации; этапа сбора вторичных данных, заключающегося в получении трека первого транспортного средства, причем упомянутый трек формируется по результатам прохождения первым транспортным средством упомянутого участка пути с учетом упомянутых данных о точке обязательной децелерации; этапа формирования расчетного трека эксплуатируемого транспортного средства, причем формирование упомянутого расчетного трека второго транспортного средства осуществляется на основании упомянутого полученного трека первого транспортного средства; при этом формирование трека первого транспортного средства заключается в выполнении следующих этапов: этапа формирования скоростного профиля первого транспортного средства на пройденном участке пути; этапа оценки энергоэффективности первого транспортного средства на пройденном участке пути; при этом упомянутые данные о точке обязательной децелерации включают одно из и/или комбинацию из: данные о точке обязательной децелерации на участке пути, к которому прилегает или с которым пересекается другой участок пути, данные о точке обязательной децелерации на участке пути, содержащем элемент инфраструктуры участка пути, регулирующий движение транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем знак дорожного движения, ограничивающий скорость движения транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем препятствие.
[0010] КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Иллюстративные варианты осуществления настоящего изобретения описываются далее подробно со ссылкой на прилагаемые чертежи, которые включены в данный документ посредством ссылки, и на которых:
[0012] На фиг. 1, в качестве примера, но не ограничения, изображена примерная схема выполнения способа 100 формирования энергоэффективного трека транспортного средства.
[0013] На фиг. 2, в качестве примера, но не ограничения, изображена примерная схема этапа 101 формирования расчетного трека первого транспортного средства.
[0014] На фиг. 3, в качестве примера, но не ограничения, изображена примерная схема этапа 102 корректировки расчетного трека первого транспортного средства
[0015] На фиг. 4, в качестве примера, но не ограничения, изображена примерная схема этапа 103 оценки результатов прохождения первым транспортным средством участка пути.
[0016] На фиг. 5, в качестве примера, но не ограничения, изображена примерная схема этапа 104 формирования расчетного трека второго транспортного средства.
[0017] На фиг. 6, в качестве примера, но не ограничения, изображена примерная схема этапа 105 корректировки расчетного трека второго транспортного средства.
[0018] На фиг. 7, в качестве примера, но не ограничения, изображена примерная схема этапа 106 оценки результатов прохождения вторым транспортным средством участка пути.
[0019] На фиг. 8, в качестве примера, но не ограничения, представлена примерная схема системы 200 формирования энергоэффективного трека энергоэффективного транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему обязательную точку децелерации.
[0020] ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0021] В предпочтительном варианте осуществления настоящего изобретения обеспечивается исполняемый процессором компьютерного устройства способ формирования энергоэффективного трека эксплуатируемого транспортного средства при движении транспортного средства по участку пути, включающему обязательную точку децелерации, заключающийся, по меньшей мере, в выполнении этапов: этапа сбора первичных данных, заключающегося в получении данных, ассоциированных с первым транспортным средством; данных, ассоциированных с участком пути, который будет пройден первым транспортным средством; и данных, ассоциированных со вторым транспортным средством, причем такое второе транспортное средство является эксплуатируемым транспортным средством и пройдет упомянутый участок пути позже первого транспортного средства; причем упомянутые данные, ассоциированные с участком пути, по меньшей мере, включают данные о точке обязательной децелерации; этапа сбора вторичных данных, заключающегося в получении трека первого транспортного средства, причем упомянутый трек формируется по результатам прохождения первым транспортным средством упомянутого участка пути с учетом упомянутых данных о точке обязательной децелерации; этапа формирования расчетного трека эксплуатируемого транспортного средства, причем формирование упомянутого расчетного трека второго транспортного средства осуществляется на основании упомянутого полученного трека первого транспортного средства; при этом формирование трека первого транспортного средства заключается в выполнении следующих этапов: этапа формирования скоростного профиля первого транспортного средства на пройденном участке пути; этапа оценки энергоэффективности первого транспортного средства на пройденном участке пути; при этом упомянутые данные о точке обязательной децелерации включают одно из и/или комбинацию из: данные о точке обязательной децелерации на участке пути, к которому прилегает или с которым пересекается другой участок пути, данные о точке обязательной децелерации на участке пути, содержащем элемент инфраструктуры участка пути, регулирующий движение транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем знак дорожного движения, ограничивающий скорость движения транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем препятствие
[0022] В частном варианте осуществления настоящего изобретения обеспечивается упомянутый способ, характеризующийся тем, что упомянутые данные, ассоциированные с первым и/или вторым транспортным средством представляют собой, по меньшей мере, одно из и/или комбинацию из: вид и тип первого транспортного средства; масса первого транспортного средства; аэродинамические характеристики первого транспортного средства; колесная формула первого транспортного средства; расчетные и/или фактические данные о расходе энергии первым транспортным средством и данные датчиков ускорения и/или скорости первого транспортного средства; данные датчиков позиционирования первого транспортного средства, датчиков веса первого транспортного средства и датчиков вращения колес первого транспортного средства.
[0023] В частном варианте осуществления настоящего изобретения обеспечивается упомянутый способ, характеризующийся тем, что упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, одно из и/или комбинацию из данных внешних источников: данные о геометрии упомянутого участка пути, данные об уклоне дороги на упомянутом участке пути, данные о скоростном режиме на упомянутом на участке пути, данные о качестве дорожного покрытия на упомянутом участке пути, данные о наличии ограничений скорости движения на упомянутом участке пути, данные о наличии поворотов на упомянутом участке пути, данные о погодных условиях на упомянутом участке пути, данные инфраструктуры упомянутого участка пути, данные о транспортном средстве, находящемся на упомянутом другом участке пути, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства.
[0024] В частном варианте осуществления настоящего изобретения обеспечивается упомянутый способ, характеризующийся тем, что в случае, когда упомянутыми данными о точке обязательной децелерации являются данные о точке обязательной децелерации на участке пути, с которым пересекается другой участок пути, и при этом упомянутые данные инфраструктуры упомянутого участка пути включают данные средства регулирования дорожного движения, сигнализирующие о допустимости движения без остановки путем пересечения упомянутого другого участка пути в момент времени, когда упомянутое первое транспортное средство достигнет упомянутой точки обязательной децелерации, обеспечивают формирование расчетного трека упомянутого первого транспортного средства, причем такое формирование включает расчет времени, требуемого для пересечения упомянутым первым транспортным средством упомянутого другого участка пути при движении упомянутого первого транспортного средства от упомянутой точки обязательной децелерации до точки завершения пересечения упомянутого другого участка пути, причем такая точка завершения пересечения упомянутого другого участка пути не расположена на упомянутом другом участке пути и расположена по направлению движения упомянутого первого транспортного средства по траектории, пересекающей упомянутый другой участок пути, при этом по результатам упомянутого расчета времени обеспечивают формирование расчетного скоростного профиля упомянутого первого транспортного средства для упомянутого расчетного трека упомянутого первого транспортного средства, причем формируемый расчетный скоростной профиль включает, по меньшей мере, одно из: движение через упомянутую точку обязательной децелерации без изменения скорости движения упомянутого первого транспортного средства, движение через упомянутую точку обязательной децелерации с уменьшением скорости движения упомянутого первого транспортного средства до полной остановки в точке обязательной остановки, причем упомянутая точка обязательной остановки расположена по направлению движения упомянутого первого транспортного средства по траектории, не достигающей упомянутого другого участка пути, движение через упомянутую точку обязательной децелерации с увеличением скорости движения упомянутого первого транспортного средства таким образом, чтобы обеспечить пересечение первым транспортным средством упомянутого другого участка пути за время, соответствующее времени, полученному при упомянутом расчете времени, требуемого для упомянутого пересечения упомянутым первым транспортным средством упомянутого другого участка пути.
[0025] В частном варианте осуществления настоящего изобретения обеспечивается упомянутый способ, характеризующийся тем, что при упомянутом формировании расчетного трека упомянутого первого транспортного средства учитывают одно из или комбинацию из: данные о транспортном средстве, находящемся на упомянутом другом участке пути, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства.
[0026] В частном варианте осуществления настоящего изобретения обеспечивается упомянутый способ, характеризующийся тем, что в случае, когда упомянутыми данными о точке обязательной децелерации являются данные о точке обязательной децелерации на участке пути, с которым пересекается другой участок пути, и при этом упомянутые данные инфраструктуры упомянутого участка пути включают данные средства регулирования дорожного движения, сигнализирующие о недопустимости движения без остановки путем пересечения упомянутого другого участка пути в момент времени, когда упомянутое первое транспортное средство достигнет упомянутой точки обязательной децелерации, обеспечивают формирование расчетного трека упомянутого первого транспортного средства, причем такое формирование включает получение данных о времени, когда данные упомянутого средства регулирования дорожного движения будут сигнализировать о допустимости движения без остановки путем пересечения упомянутого другого участка пути, и на основании упомянутых полученных данных времени обеспечивают изменение точки обязательной децелерации таким образом, чтобы было обеспечено движение упомянутого первого транспортного средства по траектории, пересекающей упомянутый другой участок пути, без остановки упомянутого первого транспортного средства в момент времени, когда данные упомянутого средства регулирования дорожного движения сигнализируют о допустимости движения без остановки путем пересечения упомянутого другого участка пути.
[0027] В частном варианте осуществления настоящего изобретения обеспечивается упомянутый способ, характеризующийся тем, что упомянутые данные, ассоциированные с участком пути, по меньшей мере, включают данные о нескольких точках обязательной децелерации, при этом упомянутые данные о точках обязательной децелерации представляют собой данные о точках обязательной децелерации на упомянутом участке пути, расположенные соответственно перед несколькими другими участками пути, с которыми пересекается упомянутый участок пути, при этом с каждым соответствующим упомянутым другим участком пути ассоциированы соответствующие упомянутые данные средства регулирования дорожного движения, при этом действия упомянутого способа по п. 6 выполняются для каждой из упомянутых точек обязательной децелерации таким образом, чтобы было обеспечено движение упомянутого первого транспортного средства по соответствующим траекториям, пересекающим соответствующие упомянутые другие участки пути, без остановки упомянутого транспортного средства в момент времени, когда соответствующие упомянутые данные упомянутых средств регулирования дорожного движения сигнализируют о допустимости движения без остановки путем пересечения соответствующего упомянутого другого участка пути.
[0028] В частном варианте осуществления настоящего изобретения обеспечивается упомянутый способ, характеризующийся тем, что в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, данные о транспортном средстве, находящемся на упомянутом другом участке пути, обеспечивают получение трека упомянутого транспортного средства, находящегося на упомянутом другом участке пути, причем упомянутый трек такого транспортного средства включает, по меньшей мере, данные, ассоциированные с участком пути, по которому движется такое транспортное средство, при этом такие ассоциированные с участком пути данные включают данные о траектории движения такого транспортного средства, находящегося на упомянутом другом участке пути, при этом данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные о траектории движения первого транспортного средства, при этом в случае, когда упомянутые данные траекторий движения включают данные о точке пересечения траектории движения первого транспортного средства с траекторией движения упомянутого транспортного средства, находящегося на упомянутом другом участке пути, обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы исключить одновременное нахождение первого транспортного средства и упомянутого транспортного средства, находящегося на упомянутом другом участке пути, в упомянутой точке пересечения траекторий движения, и при этом обеспечить движение упомянутого первого транспортного средства по упомянутой траектории движения упомянутого первого транспортного средства без остановки.
[0029] В частном варианте осуществления настоящего изобретения обеспечивается упомянутый способ, характеризующийся тем, что упомянутые данные ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, одно из или комбинацию из: данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства; при этом, в случае, когда упомянутые данные ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные прогноза нахождения на упомянутом другом участке пути транспортного средства, обеспечивают получение прогноза трека упомянутого транспортного средства, которое может находится на упомянутом другом участке пути, причем упомянутый прогноз трека такого транспортного средства включает, по меньшей мере, данные, ассоциированные с участком пути, по которому может двигаться такое транспортное средство, при этом такие ассоциированные с участком пути данные включают данные о прогнозе траектории движения такого транспортного средства, которое может находиться на упомянутом другом участке пути, при этом данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные о траектории движения первого транспортного средства, при этом в случае, когда упомянутые данные траектории движения первого транспортного средства и данные о прогнозе траектории движения транспортного средства, которое может находиться на упомянутом другом участке пути, включают данные о точке пересечения траектории движения первого транспортного средства с прогнозируемой траекторией движения упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы исключить одновременное нахождение первого транспортного средства и упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, в упомянутой точке пересечения упомянутой траектории движения первого транспортного средства и упомянутой прогнозируемой траектории движения транспортного средства, которое может находиться на упомянутом другом участке пути, и при этом обеспечить движение упомянутого первого транспортного средства по упомянутой траектории движения упомянутого первого транспортного средства без остановки; при этом, когда в случае, когда упомянутые данные ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства, обеспечивают получение прогноза трека такого транспортного средства и обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы было обеспечено формирование расчетного трека упомянутого первого транспортного средства, соответствующего упомянутому прогнозу трека транспортного средства, которое может находиться на упомянутом участке пути, который будет пройден первым транспортным средством, в точке обязательной децелерации или рядом с ней, при движении упомянутого первого транспортного средства по упомянутому участку пути со скоростью движения, меньшей, чем скорость движения упомянутого транспортного средства, которое может находиться на упомянутом участке пути, который будет пройден первым транспортным средством, в точке обязательной децелерации или рядом с ней.
[0030] В другом предпочтительном варианте осуществления настоящего изобретения обеспечивается машиночитаемый носитель данных, содержащий код программы, который при выполнении процессором компьютерного устройства побуждает процессор компьютерного устройства выполнять действия какого-либо упомянутого способа формирования энергоэффективного трека эксплуатируемого транспортного средства при движении транспортного средства по участку пути, включающему точку обязательной децелерации.
[0031] Далее приводятся варианты осуществления настоящего изобретения, раскрывающие примеры его реализации в частных исполнениях. Тем не менее, само описание не предназначено для ограничения объема прав, предоставляемых данным патентом. Скорее, следует исходить из того, что заявленное изобретение также может быть осуществлено другими способами таким образом, что будет включать в себя отличающиеся элементы и условия или комбинации элементов и условий, аналогичных элементам и условиям, описанным в данном документе, в сочетании с другими существующими и будущими технологиями.
[0032] На фиг. 1 в качестве примера, но не ограничения, изображена примерная схема выполнения способа 100 формирования энергоэффективного трека транспортного средства. Предпочтительно, не ограничиваясь, упомянутый способ 100 состоит из следующих этапов: необязательного этапа 101 формирования расчетного трека первого транспортного средства; необязательного этапа 102 корректировки расчетного трека первого транспортного средства; этапа 103 оценки результатов прохождения первым транспортным средством участка пути; этапа 104 формирования расчетного трека эксплуатируемого (второго) транспортного средства; необязательного этапа 105 корректировки расчетного трека эксплуатируемого (второго) транспортного средства; необязательного этапа 106 оценки результатов прохождения эксплуатируемым (вторым) транспортным средством участка пути; необязательного этапа 107 формирования базы данных треков. Предпочтительно, не ограничиваясь, транспортным средством является любое известное из уровня техники моторное транспортное средство, например, не ограничиваясь, колесное моторное транспортное средство или гусеничное моторное транспортное средство, при этом такое транспортное средство обязательно содержит, по меньшей мере, один двигатель, расходующий энергию на приведение в движение, по меньшей мере, одного движителя транспортного средства, например, не ограничиваясь, колеса. Расходуемой двигателем энергией является, например, не ограничиваясь, энергия, получаемая при сгорании топлива (в случае, если транспортное средство оснащено двигателем внутреннего сгорания), или электрическая энергия (в случае, если транспортное средство оснащено электродвигателем), или их комбинация (в случае, если транспортное средство оснащено гибридным двигателем). Первым транспортным средством является упомянутое транспортное средство, первым проходящее участок пути. Вторым транспортным средством является упомянутое транспортное средство, которое пройдет этот же участок пути позднее чем он будет пройден первым транспортным средством. Эксплуатируемым транспортным средством, предпочтительно, не ограничиваясь, может являться упомянутое второе транспортное средство, которое пройдет этот же участок пути позднее, чем он будет пройден первым транспортным средством, либо, не ограничиваясь, какое-либо транспортное средство, которое пройдет этот же участок пути позднее, чем он будет пройден вторым транспортным средством, и, соответственно, позднее, чем он будет пройден первым транспортным средством. Хотя некоторые из описанных далее способов и методов предназначены для реализации в составе системы управления движением именно эксплуатируемого (второго) транспортного средства или в соединении с этой системой, специалисту в данной области техники, обладающему обычными знаниями, на которого это изобретение рассчитано, должно быть очевидно, что такие способы и методы могут быть реализованы в составе систем и устройств, не связанных именно с эксплуатируемым (вторым) транспортным средством, либо связанных с ним опосредовано, а также в рамках компьютерного моделирования. Предпочтительно, не ограничиваясь, управление упомянутыми транспортными средствами осуществляется посредством соответствующей системы управления транспортным средством, которая включает набор взаимосвязанного оборудования и элементов, пригодных для управления транспортным средством оператором, то есть водителем, или автономной системой управления, или удаленным пользователем, или удаленной системой управления, для приведения транспортного средства в движение, прекращения его движения, изменений траектории его движения, изменения скорости его движения и тому подобных действий. Системы управления транспортными средствами являются общеизвестными и поэтому дополнительно не описываются, однако предпочтительно, не ограничиваясь, система управления заявленного транспортного средства обязательно содержит элемент управления скоростью движения транспортного средства, который является чем-либо из или какой-либо пригодной комбинацией из: педаль акселератора эксплуатируемого (второго) транспортного средства, педаль тормоза эксплуатируемого (второго) транспортного средства, ретардер эксплуатируемого (второго) транспортного средства, интардер эксплуатируемого (второго) транспортного средства, компрессионный тормоз эксплуатируемого (второго) транспортного средства, декомпрессионный тормоз эксплуатируемого (второго) транспортного средства, коробка передач эксплуатируемого (второго) транспортного средства. Предпочтительно, не ограничиваясь, вышеупомянутые элементы управления скоростью движения транспортного средства, а также прочие элементы системы управления движением транспортного средства, снабжены различного рода датчиками и сенсорами (такими как, не ограничиваясь, контактные и бесконтактные датчики положения, энкодеры, индуктивные датчики, магниторезистивные датчики, объемные расходомеры, емкостные датчики, кислородные датчики, датчики оксидов азота, датчики температуры, датчики давления, датчики детонации, датчики уровня масла, датчики уровня освещенности, датчики дождя, а также различные сенсоры обстановки, такие как, не ограничиваясь, радары, лидары, камеры, системы глобального позиционирования, датчики одометрии, гиростабилизаторы), позволяющими определить состояние каждого вышеупомянутого элемента в требуемый момент времени, а также определить положение транспортного средства в пространстве в требуемый момент времени, а также определить его техническое состояние и другие параметры в требуемый момент времени. Предпочтительно, не ограничиваясь, вышеупомянутые датчики и сенсоры обеспечены возможностью предоставления выходных данных в цифровом виде. Вышеупомянутые датчики и сенсоры, равно как и способы получения полезной информации с этих датчиков и сенсоров, широко известны из уровня техники и, соответственно, подробно далее не описываются. Предпочтительно, не ограничиваясь, система управления транспортным средством также включает в себя какие-либо электронные устройства, пригодные для осуществления компьютерных вычислений (приборная панель; устройства для проецирования визуальной информации на ветровое стекло транспортного средства; устройство для проецирования визуальной информации на дисплей типа HUD; головное устройство; пользовательское устройство, в том числе, носимое пользовательское устройство), приема и передачи данных (приемо-передатчик), предоставления графических пользовательских интерфейсов (дисплей приборной панели; дисплей устройства для проецирования визуальной информации на ветровое стекло транспортного средства; дисплей типа HUD устройства для проецирования визуальной информации на дисплей типа HUD; дисплей головного устройства; дисплей пользовательского устройства, в том числе, дисплей типа HUD носимого пользовательского устройства), предоставления аудиосигналов (динамики). Предпочтительно, не ограничиваясь, электронные устройства для осуществления компьютерных вычислений содержат, по меньшей мере, процессор и память, содержащую код программы, который при выполнении процессором побуждает процессор выполнять действия какого-либо исполняемого процессором такого устройства способа. Например, не ограничиваясь, вышеупомянутые процессор и память могут являться центральными процессорами и основной памятью системы управления транспортным средством, реализованных в виде центрального устройства управления. Предпочтительно, не ограничиваясь, приборная панель транспортного средства содержит вышеупомянутый процессор и память, и/или связана с вышеупомянутым центральным устройством управления. Предпочтительно, не ограничиваясь, устройство для проецирования визуальной информации на ветровое стекло транспортного средства содержит вышеупомянутый процессор и память, и/или связано с вышеупомянутым центральным устройством управления. Предпочтительно, не ограничиваясь, устройство для проецирования визуальной информации на дисплей типа HUD содержит вышеупомянутый процессор и память, и/или связано с вышеупомянутым центральным устройством управления. Предпочтительно, не ограничиваясь, головное устройство транспортного средства содержит вышеупомянутый процессор и память, и/или связано с вышеупомянутым центральным устройством управления. Предпочтительно, не ограничиваясь, пользовательское устройство связано с системой управления транспортным средством по известным протоколам передачи данных и содержит вышеупомянутый процессор и память, и/или связано с вышеупомянутым центральным устройством управления по известным протоколам передачи данных. Например, не ограничиваясь, пользовательское устройство представляет собой смартфон, КПК, планшетный компьютер, нетбук, ноутбук и тому подобное. Например, не ограничиваясь, пользовательское устройство представляет собой носимое пользовательское устройство, такое как, например, носимый дисплей, описанный в патенте US 10176783 B2 или тому подобное устройство. Предпочтительно, не ограничиваясь, когда пользовательское устройство является носимым пользовательским устройством, оно снабжено дисплеем типа HUD, пригодным для выведения визуальной информации. Предпочтительно, не ограничиваясь, вышеупомянутые приборная панель, головное устройство и устройство для проецирования визуальной информации на ветровое стекло транспортного средства содержат соответствующий пригодный для выведения визуальной информации дисплей, либо каким-либо образом связаны с таким дисплеем. Предпочтительно, не ограничиваясь, вышеупомянутое устройство для проецирования визуальной информации на дисплей типа HUD содержит соответствующий пригодный для выведения визуальной информации дисплей типа HUD, либо каким-либо образом связано с таким дисплеем. Предпочтительно, не ограничиваясь, в настоящем документе под компьютерными устройствами в целом понимаются любые пригодные компьютерные устройства, содержащие, как минимум, процессор и память, в частности, не ограничиваясь, заявленные электронные устройства, пригодные для осуществления компьютерных вычислений, пользовательское устройство и сервер системы формирования энергоэффективного трека эксплуатируемого (второго) транспортного средства. Предпочтительно, не ограничиваясь, посредством приемо-передатчика система управления транспортного средства может быть связана, не ограничиваясь, с пользовательским устройством, с сервером системы формирования энергоэффективного трека, с другими серверами и системами управления других транспортных средств. Предпочтительно, не ограничиваясь, формируемые расчетные и/или энергоэффективные треки для каждого транспортного средства могут быть использованы для формирования управляющего сигнала, направленного на управление движением соответствующего транспортного средства и/или могут быть использованы для формирования информационного сигнала, направленного на информирование какого-либо оператора о необходимости изменения движения соответствующего транспортного средства.
[0033] Предпочтительно, не ограничиваясь, упомянутый участок пути представляет собой участок пути, обладающий особыми свойствами. Путь представляет собой, не ограничиваясь, полосу земли, приспособленную для проезда транспортных средств, при этом путь может включать, не ограничиваясь, дорогу, дорожную развязку, перекресток дорог и тому подобное. Дорогой может являться, не ограничиваясь, дорога с твердым покрытием или дорога с грунтовым покрытием. Предпочтительно, не ограничиваясь, особыми свойствами участка пути является, по меньшей мере, одно из, или комбинация из: геометрия участка пути, уклон дороги на участке пути, скоростной режим на участке пути, качество дорожного покрытия на участке пути, наличие ограничений скорости движения на участке пути, наличие поворотов на участке пути, погодные условия на участке пути на момент прохождения участка каким-либо упомянутым транспортным средством, инфраструктура участка пути. В качестве примера, но не ограничения, упомянутые особые свойства участка пути могут быть охарактеризованы точками акселерации и/или точками децелерации, в том числе, расчетными точками акселерации и/или расчетными точками децелерации. При этом, не ограничиваясь, как будет показано далее, расчетные треки транспортных средств могут содержать соответствующие данные о расчетных точках акселерации и/или данные о расчетных точках децелерации, и при этом, не ограничиваясь, как будет показано далее, формируемые треки транспортных средств могут содержать данные о фактически точках акселерации и/или данные о фактических точках децелерации, при этом, не ограничиваясь, такие данные могут быть подвергнуты анализу и обработке, позволяющему определить какие-либо отклонения между расчетными и фактическими данными для определения их влияния на энергоэффективность движения того или иного транспортного средства. При этом, не ограничиваясь, точкой децелерации может являться такая точка на участке пути, в которой импульс транспортного средства достаточен для преодоления расстояния до точки акселерации на участке пути. При этом, не ограничиваясь, точкой децелерации может являться такая точка на участке пути, в которой транспортному средству должно быть передано отрицательное или нулевое ускорение для того, чтобы транспортное средство беспрепятственно продвинулось до точки акселерации, в том числе такое отрицательное ускорение, при котором в точке акселерации импульс транспортного средства будет равен нулю. При этом, не ограничиваясь, точкой акселерации может являться такая точка на участке пути, в которой транспортное средство продолжает движение с отрицательным ускорением. При этом, не ограничиваясь, точкой акселерации может являться такая точка на участке пути, в которой транспортное средство обладает нулевым импульсом. Например, не ограничиваясь, в качестве участка пути может быть рассмотрен участок, содержащий дорогу, обладающую склоном и следующим за ним подъемом, при этом начало склона может быть охарактеризовано точкой децелерации, а в пределах подъема может быть помещена точка акселерации.
[0034] Как показано на фиг. 2, упомянутый необязательный этап 101 формирования расчетного трека первого транспортного средства, например, не ограничиваясь, состоит из следующих этапов: этапа 1011 идентификации первого транспортного средства; этапа 1012 идентификации участка пути; этапа 1013 формирования расчетного трека первого транспортного средства. Например, не ограничиваясь, упомянутый этап 1011 заключается в определении первого транспортного средства и данных, ассоциированных с первым транспортным средством. Такими данными могут быть, например, не ограничиваясь, по меньшей мере, одно из и/или комбинация из: вид и тип первого транспортного средства; масса первого транспортного средства; аэродинамические характеристики первого транспортного средства; колесная формула первого транспортного средства; расчетные и/или фактические данные о расходе энергии первым транспортным средством и данные датчиков ускорения и/или скорости первого транспортного средства; данные датчиков позиционирования первого транспортного средства, датчиков веса первого транспортного средства и датчиков вращения колес первого транспортного средства. В целом следует исходить из того, что такие данные могут быть использованы для получения расчетного скоростного профиля первого транспортного средства на участке пути. Помимо этого, в рамках упомянутого этапа 1011 определяется местоположение первого транспортного средства по отношению к участку пути, идентифицируемому на упомянутом этапе 1012. При этом, например, не ограничиваясь, упомянутый этап 1012 заключается в определении первого участка пути по направлению движения первого транспортного средства в зависимости от местоположения первого транспортного средства. Помимо этого, в рамках упомянутого этапа 1012 определяются упомянутые особые свойства участка пути, являющиеся данными, ассоциированными с участком пути, который будет пройден первым транспортным средством. В целом следует исходить из того, что такие данные об особых свойствах участка пути могут быть использованы для получения расчетного скоростного профиля первого транспортного средства на этом участке пути. При этом, например, не ограничиваясь, в рамках упомянутого этапа 1013 осуществляется формирование расчетного трека первого транспортного средства на упомянутом участке пути с учетом упомянутых данных, ассоциированных с первым транспортным средством и упомянутых данных, ассоциированных с участком пути, который будет пройден первым транспортным средством. Таким образом формируемый расчетный трек первого транспортного средства содержит данные, ассоциированные с первым транспортным средством, и данные ассоциированные с участком пути, который будет пройден первым транспортным средством. Предпочтительно, не ограничиваясь, формируемый расчетный трек первого транспортного средства также содержит расчетный скоростной профиль первого транспортного средства в пределах формируемого трека первого транспортного средства, который содержит, по меньшей мере, расчетные положения первого транспортного средства на участке пути и расчетные скорости движения первого транспортного средства на участке пути, ассоциированные с упомянутыми соответствующими расчетными положениями первого транспортного средства на участке пути. Дополнительно, не ограничиваясь, расчетный скоростной профиль первого транспортного средства содержит расчетные состояния элемента управления скоростью движения первого транспортного средства, выбранного из или представляющего собой какую-либо комбинацию из: педаль акселератора первого транспортного средства, педаль тормоза первого транспортного средства, ретардер первого транспортного средства, интардер первого транспортного средства, компрессионный тормоз первого транспортного средства, декомпрессионный тормоз первого транспортного средства, коробка передач первого транспортного средства; при этом под состоянием элемента управления скоростью движения в контексте настоящего описания понимается положение подвижных частей соответствующего элемента управления в активном состоянии, то есть по отношению к состоянию, в котором этот соответствующий элемент не активирован, и/или любое иное активное состояние этого элемента, и/или любое иное неактивное состояние этого элемента; при этом расчетные состояния упомянутого элемента управления также ассоциированы с соответствующим расчетным положением транспортного средства на участке пути. В дальнейшем движение первого транспортного средства по упомянутому участку пути осуществляется с учетом расчетного трека первого транспортного средства, при этом предполагается, что расчетный трек первого транспортного средства является энергоэффективным. При этом энергоэффективным является такой трек транспортного средства, при движении в рамках которого время, затрачиваемое на прохождение участка пути транспортным средством, является минимальным, и энергия, затрачиваемая на прохождение участка пути транспортным средством, является минимальной. Тем не менее, специалисту в области техники, которой присуще настоящее изобретение, обладающему обычными знаниями, на которого это изобретение рассчитано, должно быть очевидно, что упомянутый формируемый в рамках упомянутого этапа 101 расчетный трек первого транспортного средства может быть получен иным образом, нежели описанный ранее.
[0035] Как показано на фиг. 3, необязательный упомянутый этап 102 корректировки расчетного трека первого транспортного средства, например, не ограничиваясь, состоит из следующих этапов: этапа 1021 определения фактического скоростного профиля первого транспортного средства, по меньшей мере, в один из моментов времени в процессе прохождения участка пути; этапа 1022 сравнения упомянутого фактического скоростного профиля с соответствующим расчетным скоростным профилем из упомянутого расчетного трека первого транспортного средства; при необходимости этапа 1023 корректировки фактического скоростного профиля в ответ на упомянутое сравнение. Например, не ограничиваясь, упомянутый этап 1021 заключается в определении местоположения первого транспортного средства на упомянутом участке пути, и определения скорости вращения, по меньшей мере, одного колеса первого транспортного средства в определенный упомянутый момент времени. При этом, например, не ограничиваясь, упомянутый этап 1022 заключается в определении расчетной скорости вращения, по меньшей мере, одного упомянутого колеса первого транспортного средства в этот же упомянутый момент времени, и сравнении упомянутых фактической и расчетной скоростей вращений упомянутого колеса первого транспортного средства. При этом, например, не ограничиваясь, в случае если упомянутая фактическая скорость вращения упомянутого колеса отличается от упомянутой расчетной скорости вращения этого колеса, в рамках этапа 1023 формируется сигнал контроля расхода энергии для первого транспортного средства. Такой сигнал контроля расхода энергии, например, не ограничиваясь, содержит сигнал управления для системы управления движением первого транспортного средства, благодаря которому работа двигателя, и/или тормозной системы первого транспортного средства, и/или иных технических средств первого транспортного средства изменяется таким образом, чтобы упомянутая фактическая скорость вращения упомянутого колеса соответствовала упомянутой расчетной скорости вращения упомянутого колеса в упомянутый момент времени. Тем не менее, специалисту в области техники, которой присуще настоящее изобретение, обладающему обычными знаниями, на которого это изобретение рассчитано, должно быть очевидно, что упомянутая корректировка упомянутого расчетного трека первого транспортного средства, хотя и повышает точность последующего формирования энергоэффективного трека эксплуатируемого (второго) транспортного средства, позволяющего снизить расход энергии эксплуатируемым (вторым) транспортным средством на конкретном участке пути, не является обязательной, так как для формирования точного энергоэффективного трека эксплуатируемого (второго) транспортного средства может быть достаточно фактического трека первого транспортного средства, метод формирования которого будет описан далее.
[0036] Как показано на фиг. 4, упомянутый этап 103 оценки результатов прохождения первым транспортным средством участка пути, являющийся также этапом сбора вторичных данных, например, не ограничиваясь, состоит из следующих этапов: этапа 1031 сбора вторичных данных, ассоциированных с первым транспортным средством и/или вторичных данных, ассоциированных с участком пути, пройденным первым транспортным средством; этапа 1032 формирования трека первого транспортного средства; этапа 1033 оценки энергоэффективности трека первого транспортного средства. Например, не ограничиваясь, упомянутый этап 1031 сбора упомянутых вторичных данных заключается в определении факта прохождения первым транспортным средством участка пути, например, не ограничиваясь, на основе местоположения первого транспортного средства по отношению к границам участка пути, и необязательном уточнении данных, ассоциированных с первым транспортным средством, и/или данных, ассоциированных с участком пути. В целом следует исходить из того, что на данном этапе осуществляется сбор фактических данных, ассоциированных с первым транспортным средством и/или с участком пути, пройденным транспортным средством. В целом следует исходить из того, что такие данные могут быть использованы для формирования фактического трека первого транспортного средства, формируемого по результатам прохождения первым транспортным средством участка пути. При этом в целом следует исходить из того, что уточнение данных, ассоциированных с первым транспортным средством и/или с участком пути, может быть использовано для оценки энергоэффективности упомянутого формируемого трека первого транспортного средства. При этом, например, не ограничиваясь, упомянутый этап 1032 аналогичен упомянутому этапу 1012 с той лишь разницей, что помимо первичных данных, ассоциированных с первым транспортным средством и/или участком пути, для формирования трека первого транспортного средства могут быть использованы вторичные данные, собранные в рамках упомянутого этапа 1031. Таким образом, формируемый в рамках этапа 1032 фактический трек первого транспортного средства содержит, в том числе, фактические данные, ассоциированные с первым транспортным средством, в том числе, не ограничиваясь, фактический скоростной профиль первого транспортного средства на участке пути, и фактические данные, ассоциированные с участком пути. При этом, не ограничиваясь, фактический скоростной профиль первого транспортного средства включает, не ограничиваясь, фактические положения первого транспортного средства на участке пути и фактические скорости движения первого транспортного средства на участке пути, ассоциированные с упомянутыми фактическими положениями первого транспортного средства на участке пути, а также фактические состояния упомянутых элементов управления скоростью движения первого транспортного средства, также ассоциированные с упомянутыми фактическими положениями первого транспортного средства на участке пути. При этом, например, не ограничиваясь, упомянутый этап 1033 заключается в оценке энергоэффективности сформированного трека первого транспортного средства. В целом следует исходить из того, что формируемый таким образом трек первого транспортного средства будет считаться энергоэффективным, если при движении в соответствии с ним затрачиваемое на прохождение участка пути первым транспортным средством, является минимальным, и энергия, затрачиваемая на прохождение участка пути первым транспортным средством, является минимальной. Таким образом, в целом следует исходить их того, что в рамках упомянутого этапа 1033 осуществляется сравнение энергоэффективности расчетного трека первого транспортного средства и формируемого трека первого транспортного средства. При этом в целом следует исходить из того, что в случае, если формируемый трек первого транспортного средства является более энергоэффективным, чем расчетный трек первого транспортного средства, то при формировании расчетного трека эксплуатируемого (второго) транспортного средства используется именно такой трек, даже в том случае, если формируемый (фактический) трек первого транспортного средства отличается от расчетного трека первого транспортного средства. В противном случае в целом следует исходить из того, что формирование расчетного трека эксплуатируемого (второго) транспортного средства также осуществляется на основании упомянутого фактического трека первого транспортного средства, но при этом учитываются упомянутые вторичные данные, ассоциированные с первым транспортным средством и/или с пройденным им участком пути. Более того, расчетный трек первого транспортного средства по результатам прохождения первым транспортным средством участка пути также может быть скорректирован с учетом уточненных данных, ассоциированных с первым транспортным средством и/или с участком пути. В таком случае оценка энергоэффективности формируемого трека первого транспортного средства осуществляется по отношению к скорректированному расчетному треку первого транспортного средства. В целом следует исходить из того, что формируемый в дальнейшем расчетный трек эксплуатируемого (второго) транспортного средства должен быть энергоэффективным, и его формирование обязательно должно учитывать особенности упомянутого фактического трека первого транспортного средства. Тем не менее, специалисту в области техники, которой присуще настоящее изобретение, обладающему обычными знаниями, на которого это изобретение рассчитано, должно быть очевидно, что в качестве расчетного трека первого транспортного средства, как это было сказано ранее, может рассматриваться любой расчетный трек первого транспортного средства, содержащий упомянутые данные, ассоциированные с первым транспортным средством, и упомянутые данные ассоциированные с участком пути, который будет пройден первым транспортным средством, в том числе, не ограничиваясь, расчетный трек первого транспортного средства, скорректированный в рамках упомянутого этапа 102.
[0037] Как будет показано далее, этапы формирования расчетных и/или энергоэффективных треков для второго транспортного средства, для эксплуатируемого транспортного средства, а также для любого другого последующего транспортного средства, проходящего участок пути позднее первого транспортного средства, в целом идентичны и могут являться взаимозаменяемыми; в качестве примера, но не ограничения, будет показано формирование расчетных и/или энергоэффективных треков для эксплуатируемого (второго) транспортного средства, однако, как было сказано ранее, специалисту в данной области техники, обладающему обычными знаниями, на которого рассчитано настоящее изобретение, должно быть очевидно, что вышеупомянутые способы и методы могут быть использованы для формирования соответствующих треков для любого транспортного средства, проходящего вышеупомянутый участок пути позднее первого транспортного средства. Как показано на фиг. 5, упомянутый этап 104 формирования расчетного трека эксплуатируемого (второго) транспортного средства заключается в выполнении следующих этапов: этапа 1041 идентификации первого транспортного средства; этапа 1042 идентификации участка пути; этапа 1043 формирования расчетного трека первого транспортного средства. Например, не ограничиваясь, упомянутый этап 1041 в целом аналогичен упомянутому этапу 1011, но с той разницей, что собираемые данные, ассоциированные с эксплуатируемым (вторым) транспортным средством, не относятся к данным, ассоциированным с первым транспортным средством. При этом, например, не ограничиваясь, в зависимости от собранных данных, ассоциированных с эксплуатируемым (вторым) транспортным средством, может быть использован дополнительный коэффициент приведения, или какой-либо метод нормализации, который может быть полезен в том случае, когда данные, ассоциированные с эксплуатируемым (вторым) транспортным средством, отличаются от каких-либо данных, ассоциированных с первым транспортным средством. При этом, например, не ограничиваясь, в рамках данного этапа также могут быть уточнены данные об участке пути, которые могут быть уточнены без использования таких данных из упомянутого трека первого транспортного средства, например, не ограничиваясь, метеоданные, ассоциированные с участком пути, которые будут актуальными на момент прохождения эксплуатируемым (вторым) транспортным средством участка пути, а также данные инфраструктуры участка пути. В целом следует исходить из того, что первое и эксплуатируемое (второе) транспортные средства отличаются друг от друга, поэтому оценка энергоэффективности их треков на участке пути также должна осуществляться различным образом, однако, предпочтительно, не ограничиваясь, в части приведения значений к нормализованным. При этом, например, не ограничиваясь, упомянутый этап 1042 в целом аналогичен упомянутому этапу 1012, но с той разницей, что при сборе данных, ассоциированных с участком пути, в том числе, собирают упомянутые уточненные данные, ассоциированные с участком пути, содержащиеся в упомянутом формируемом треке первого транспортного средства. В целом следует исходить их того, что в рамках упомянутого этапа 1042 собираемые данные, ассоциированные с участком пути будут являться более точными, чем аналогичные данные, содержащиеся в расчетном треке первого транспортного средства. При этом, например, не ограничиваясь, упомянутый этап 1043 в целом аналогичен упомянутому этапу 1013, но с той разницей, что помимо собираемых данных, ассоциированных с первым транспортным средством и/или с участком пути и, необязательно, их нормализации, собираются (и необязательно нормализуются) данные, содержащиеся в формируемом треке первого транспортного средства. В целом следует исходить из того, что в рамках упомянутого этапа 1043 будет сформирован расчетный трек эксплуатируемого (второго) транспортного средства, учитывающий не только особенности участка пути или характеристики эксплуатируемого (второго) транспортного средства, но и опыт прохождения участка пути первым транспортным средством. Предпочтительно, не ограничиваясь, формируемый расчетный трек эксплуатируемого (второго) транспортного средства также содержит расчетный скоростной профиль эксплуатируемого (второго) транспортного средства в пределах формируемого расчетного трека эксплуатируемого (второго) транспортного средства, который содержит, по меньшей мере, расчетные положения эксплуатируемого (второго) транспортного средства на участке пути и расчетные скорости движения эксплуатируемого (второго) транспортного средства на участке пути, ассоциированные с упомянутыми соответствующими расчетными положениями эксплуатируемого (второго) транспортного средства на участке пути. Дополнительно, не ограничиваясь, расчетный скоростной профиль эксплуатируемого (второго) транспортного средства содержит расчетные состояния элемента управления скоростью движения эксплуатируемого (второго) транспортного средства, выбранного из или представляющего собой какую-либо комбинацию из: педаль акселератора первого транспортного средства, педаль тормоза первого транспортного средства, ретардер первого транспортного средства, интардер первого транспортного средства, компрессионный тормоз первого транспортного средства, декомпрессионный тормоз первого транспортного средства, коробка передач первого транспортного средства; при этом под состоянием элемента управления скоростью движения в контексте настоящего описания понимается положение подвижных частей соответствующего элемента управления в активном состоянии, то есть по отношению к состоянию, в котором этот соответствующий элемент не активирован, и/или любое иное активное состояние этого элемента, и/или любое иное неактивное состояние этого элемента; при этом расчетные состояния упомянутого элемента управления также ассоциированы с соответствующим расчетным положением эксплуатируемого (второго) транспортного средства на участке пути. При этом, не ограничиваясь, как это было показано ранее, упомянутый скоростной профиль эксплуатируемого (второго) транспортного средства может быть нормализован в соответствии с данными, ассоциированными с первым транспортным средством. Помимо этого, не ограничиваясь, скоростной профиль эксплуатируемого (второго) транспортного средства может быть заранее скорректирован на основании фактического скоростного профиля первого транспортного средства в зависимости от уточненных данных, ассоциированных с участком пути. Более конкретно, не ограничиваясь, изначально в рамках упомянутого этапа 1013 особенности участка пути не могли рассматриваться с достаточной точностью, так как отсутствовали фактические данные, ассоциированные с участком пути, такие как, например, не ограничиваясь, качество дорожного покрытия или непостоянное препятствие, в связи с чем, расчетный трек первого транспортного средства являлся заведомо неэнергоэффективным. В целом следует исходить из того, что при формировании расчетного трека первого транспортного средства могли быть использованы только данные, доступные от самого транспортного средства и из внешних источников данных. Однако, не ограничиваясь, по результатам прохождения первым транспортным средством участка пути, формируемый трек первого транспортного средства может существенно отличаться от расчетного трека первого транспортного средства, что могло произойти потому, что оператор или система управления движением первого транспортного средства постоянно оценивали обстановку на участке пути, что позволило пройти этот участок пути с большей энергоэффективностью, чем расчетная, в том числе, с учетом упомянутой корректировки расчетного трека первого транспортного средства. Таким образом, формируемый расчетный трек эксплуатируемого (второго) транспортного средства заведомо, необязательно с учетом нормализации, является более энергоэффективным, чем расчетный трек первого транспортного средства. Как это будет показано далее, в контексте настоящего изобретения, именно формируемый расчетный трек эксплуатируемого (второго) транспортного средства является предварительно сформированным энергоэффективным треком эксплуатируемого транспортного средства.
[0038] Как показано на фиг. 6, необязательный упомянутый этап 105 корректировки расчетного трека эксплуатируемого (второго) транспортного средства, например, не ограничиваясь, состоит из следующих этапов: этапа 1051 определения фактического скоростного профиля эксплуатируемого (второго) транспортного средства, по меньшей мере, в один из моментов времени в процессе прохождения участка пути; этапа 1052 сравнения упомянутого фактического скоростного профиля с соответствующим расчетным скоростным профилем из упомянутого расчетного трека эксплуатируемого (второго) транспортного средства; при необходимости этапа 1053 корректировки фактического скоростного профиля эксплуатируемого (второго) транспортного средства в ответ на упомянутое сравнение. Например, не ограничиваясь, упомянутый этап 1051 заключается в определении местоположения эксплуатируемого (второго) транспортного средства на упомянутом участке пути, и определения скорости вращения, по меньшей мере, одного колеса второго транспортного средства в определенный упомянутый момент времени. При этом, например, не ограничиваясь, упомянутый этап 1052 заключается в определении расчетной скорости вращения, по меньшей мере, одного упомянутого колеса эксплуатируемого (второго) транспортного средства в этот же упомянутый момент времени, и сравнении упомянутых фактической и расчетной скоростей вращений упомянутого колеса эксплуатируемого (второго) транспортного средства. При этом, например, не ограничиваясь, в случае если упомянутая фактическая скорость вращения упомянутого колеса отличается от упомянутой расчетной скорости вращения этого колеса, в рамках этапа 1053 формируется сигнал контроля расхода энергии для второго транспортного средства. Такой сигнал контроля расхода энергии, например, не ограничиваясь, содержит сигнал управления для системы управления движением второго транспортного средства, благодаря которому работа двигателя, и/или тормозной системы второго транспортного средства, и/или иных технических средств второго транспортного средства изменяется таким образом, чтобы упомянутая фактическая скорость вращения упомянутого колеса соответствовала упомянутой расчетной скорости вращения упомянутого колеса в упомянутый момент времени. Тем не менее, специалисту в области техники, которой присуще настоящее изобретение, обладающему обычными знаниями, на которого это изобретение рассчитано, должно быть очевидно, что упомянутая корректировка упомянутого расчетного трека эксплуатируемого (второго) транспортного средства, хотя и повышает точность последующего формирования энергоэффективного трека последующих транспортных средств, позволяющих снизить расход энергии последующими транспортными средствами на конкретном участке пути, не является обязательной, так как для формирования точных энергоэффективных треков последующих транспортных средств может быть достаточно упомянутых действий способа по упомянутому этапу 103.
[0039] Как показано на фиг. 7, необязательный упомянутый этап 106 оценки результатов прохождения эксплуатируемым (вторым) транспортным средством участка пути, например, не ограничиваясь, заключается в выполнении следующих этапов: этапа 1061 сбора вторичных данных, ассоциированных с эксплуатируемым (вторым) транспортным средством и/или вторичных данных, ассоциированных с участком пути, пройденным эксплуатируемым (вторым) транспортным средством; этапа 1062 формирования фактического трека эксплуатируемого (второго) транспортного средства; этапа 1063 оценки энергоэффективности трека эксплуатируемого (второго) транспортного средства. Например, не ограничиваясь, упомянутый этап 1061 сбора упомянутых вторичных данных заключается в определении факта прохождения эксплуатируемым (вторым) транспортным средством участка пути, например, не ограничиваясь, на основе местоположения эксплуатируемого (второго) транспортного средства по отношению к границам участка пути и/или по отношению к местоположению первого транспортного средства на момент определения факта прохождения первым транспортным средством участка пути, и необязательном уточнении данных, ассоциированных с эксплуатируемым (вторым) транспортным средством, и/или данных, ассоциированных с участком пути. В целом следует исходить из того, что на данном этапе осуществляется сбор фактических данных, ассоциированных с эксплуатируемым (вторым) транспортным средством и/или с участком пути, пройденным эксплуатируемым (вторым) транспортным средством. В целом следует исходить из того, что такие данные могут быть использованы для формирования фактического трека эксплуатируемого (второго) транспортного средства, формируемого по результатам прохождения эксплуатируемым (вторым) транспортным средством участка пути. При этом в целом следует исходить из того, что уточнение данных, ассоциированных с эксплуатируемым (вторым) транспортным средством и/или с участком пути, может быть использовано для оценки энергоэффективности упомянутого формируемого фактического трека эксплуатируемого (второго) транспортного средства. При этом, например, не ограничиваясь, упомянутый этап 1062 аналогичен упомянутому этапу 1032 с той лишь разницей, что помимо первичных данных, ассоциированных с первым транспортным средством и/или участком пути, и вторичных данных, собранных в рамках упомянутого этапа 1032, для формирования фактического трека эксплуатируемого (второго) транспортного средства могут быть использованы вторичные данные, собранные в рамках упомянутого этапа 1061. Таким образом, формируемый в рамках этапа 1062 фактический трек эксплуатируемого (второго) транспортного средства содержит, в том числе, фактические данные, ассоциированные с эксплуатируемым (вторым) транспортным средством, в том числе, фактический скоростной профиль эксплуатируемого (второго) транспортного средства на участке пути, и фактические данные, ассоциированные с участком пути, в том числе, не обязательно, с учетом нормализации этих данных по отношению к данным, собираемым на упомянутом этапе 1032. При этом, например, не ограничиваясь, упомянутый этап 1063 заключается в оценке энергоэффективности сформированного трека эксплуатируемого (второго) транспортного средства. В целом следует исходить из того, что формируемый таким образом трек эксплуатируемого (второго) транспортного средства будет считаться энергоэффективным, если при движении в соответствии с ним затрачиваемое на прохождение участка пути эксплуатируемым (вторым) транспортным средством, является минимальным, и энергия, затрачиваемая на прохождение участка пути эксплуатируемым (вторым) транспортным средством, является минимальной. Таким образом, в целом следует исходить их того, что в рамках упомянутого этапа 1063 осуществляется сравнение энергоэффективности расчетного трека эксплуатируемого (второго) транспортного средства и формируемого фактического трека эксплуатируемого (второго) транспортного средства. При этом в целом следует исходить из того, что в случае если фактический трек эксплуатируемого (второго) транспортного средства является более энергоэффективным, чем расчетный трек эксплуатируемого (второго) транспортного средства, то при формировании расчетного трека какого-либо следующего транспортного средства используется именно такой трек, даже в том случае, если формируемый (фактический) трек эксплуатируемого (второго) транспортного средства отличается от расчетного трека эксплуатируемого (второго) транспортного средства, при этом таким следующим транспортным средством является любое транспортное средство, которое пройдет упомянутый участок пути позднее эксплуатируемого (второго) транспортного средства. В противном случае в целом следует исходить из того, что формирование расчетного трека следующего транспортного средства также осуществляется на основании упомянутого фактического трека эксплуатируемого (второго) транспортного средства, но при этом учитываются упомянутые вторичные данные, ассоциированные с эксплуатируемым (вторым) транспортным средством и/или с пройденным им участком пути. Более того, расчетный трек эксплуатируемого (второго) транспортного средства по результатам прохождения эксплуатируемым (вторым) транспортным средством участка пути также может быть скорректирован с учетом уточненных данных, ассоциированных с эксплуатируемым (вторым) транспортным средством и/или с участком пути. В таком случае оценка энергоэффективности формируемого трека эксплуатируемого (второго) транспортного средства осуществляется по отношению к скорректированному расчетному треку эксплуатируемого (второго) транспортного средства. В целом следует исходить из того, что формируемый в дальнейшем расчетный трек следующего транспортного средства должен быть энергоэффективным, и его формирование обязательно должно учитывать особенности упомянутого фактического трека эксплуатируемого (второго) транспортного средства. Тем не менее, специалисту в области техники, которой присуще настоящее изобретение, обладающему обычными знаниями, на которого это изобретение рассчитано, должно быть очевидно, что упомянутая оценка результатов прохождения эксплуатируемым (вторым) транспортным средством участка пути, хотя и повышает точность последующего формирования энергоэффективных треков последующих транспортных средств, позволяющих снизить расход энергии последующими транспортными средствами на конкретном участке пути, не является обязательной, так как для последующего формирования эталонного энергоэффективного трека последующего транспортного средства может быть достаточно упомянутого расчетного трека эксплуатируемого (второго) транспортного средства или даже упомянутого расчетного трека первого транспортного средства.
[0040] Необязательный упомянутый этап 107 формирования базы данных треков, например, не ограничиваясь, заключается в сборе множества треков транспортных средств, сформированных по результатам прохождения упомянутого участка пути транспортными средствами, являющимися, по меньшей мере, первым и эксплуатируемым (вторым) транспортными средствами. Например, не ограничиваясь, в рамках упомянутого этапа 107 осуществляется сбор множества треков транспортных средств, прошедших участок пути. При этом, например, не ограничиваясь, в рамках упомянутого этапа 107 осуществляется систематизация упомянутых собранных треков таким образом, чтобы в дальнейшем эти данные могли быть использованы для формирования множества расчетных треков для упомянутых следующих транспортных средств. Более того, не ограничиваясь, множество таких треков может являться входными данными для проведения анализа, в том числе, с использованием средств машинного обучения, для выработки наиболее энергоэффективного (эталонного) трека, подходящего для любого транспортного средства. Такой эталонный трек может быть уникальным для каждого транспортного средства и впоследствии может быть использован в качестве расчетного трека для первого транспортного средства, после чего упомянутые действия способа формирования энергоэффективного трека повторятся, что приведет к формированию иного эталонного трека для этого же транспортного средства. Более того, не ограничиваясь, такие данные могут быть использованы для изменения свойств участка пути таким образом, чтобы обеспечить формирование наиболее энергоэффективного эталонного трека. Тем не менее, специалисту в области техники, которой присуще настоящее изобретение, обладающему обычными знаниями, на которого рассчитано настоящее изобретение, должно быть очевидно, что упомянутое формирование базы данных треков, хотя и повышает точность последующего формирования энергоэффективных треков последующих транспортных средств, позволяющих снизить расход энергии последующими транспортными средствами на конкретном участке пути, не является обязательной, так как для последующего формирования эталонных энергоэффективных треков транспортных средств может быть достаточно упомянутого расчетного трека эксплуатируемого (второго) транспортного средства или даже расчетного трека первого транспортного средства.
[0041] Как было указано ранее, упомянутые участки пути могут содержать упомянутые точки акселерации и/или децелерации, в том числе, расчетные точки акселерации и/или децелерации, и формируемые треки транспортных средств могут содержать данные о соответствующих фактических точках акселерации и/или децелерации, а также данные об отклонениях фактических точек от расчетных. При этом при движении транспортного средства в городской среде упомянутые участки пути часто будут характеризоваться дополнительными особенностями. Например, не ограничиваясь, участок пути в городской среде может содержать точку обязательной децелерации, обусловленную необходимостью уменьшения скорости движения транспортного средства в пределах участка пути в связи с требованиями безопасности дорожного движения. Такая точка обязательной децелерации представляет собой какую-либо координату участка пути, в которой должно быть начато движение какого-либо транспортного средства без положительного ускорения. Предпочтительно, не ограничиваясь, городская среда содержит, по меньшей мере, множество пересекающихся, и/или соприкасающихся, и/или прилегающих участков пути, каждый из которых может содержать, по меньшей мере, одну точку обязательной децелерации. Такой упомянутой точкой обязательной децелерации может быть одно из и/или комбинация из: точка обязательной децелерации на участке пути, к которому прилегает или с которым пересекается другой участок пути, точка обязательной децелерации на участке пути, содержащем элемент инфраструктуры участка пути, регулирующий движение транспортных средств на участке пути, точка обязательной децелерации на участке пути, содержащем знак дорожного движения, ограничивающий скорость движения транспортных средств на участке пути, точка обязательной децелерации на участке пути, содержащем препятствие; и тому подобные точки обязательной децелерации, обусловленные характеристиками участка пути. Предпочтительно, не ограничиваясь, упомянутые данные, ассоциированные с участком пути, могут включать какие-либо данные об упомянутых точках обязательной децелерации. Предпочтительно, не ограничиваясь, координаты упомянутых точек обязательной децелерации для каждого участка пути заданы предварительно и в виде данных могут быть получены на упомянутом этапе сбора первичных данных, в рамках которого собирают данные, ассоциированные с участком пути, который будет пройден первым транспортным средством. При этом, не ограничиваясь, предпочтительно упомянутые данные о точках обязательной децелерации заданы таким образом, чтобы при расчетный трек первого транспортного средства был энергоэффективным. Например, не ограничиваясь, когда упомянутый участок пути является участком пути, к которому прилегает другой участок пути (например, не ограничиваясь, участок пути, который будет пройден первым транспортным средством, содержит поворот, связывающий упомянутый участок пути, который будет пройден первым транспортным средством, и упомянутый другой участок пути, то есть, например, не ограничиваясь, оба таких участка пути образуют Т-образный перекресток), упомянутые данные о точке обязательной децелерации будут включать такие координаты точки обязательной децелерации, в которых должно быть начато движение транспортного средства, по меньшей мере, без положительного ускорения либо, не ограничиваясь, с каким-либо пригодным отрицательным ускорением, причем такие координаты точки обязательной децелерации могут обеспечивать энергоэффективное движение транспортного средства по траектории, соединяющей упомянутый участок пути, который будет пройден первым транспортным средством, и упомянутый другой участок пути, и в то же время такое энергоэффективное движение транспортного средства будет являться безопасным, так как обеспечит требуемое снижение скорости движения транспортного средства перед прохождение поворота. Например, не ограничиваясь, когда упомянутый участок пути является участком пути, с которым пересекается другой участок пути (например, не ограничиваясь, участок пути, который будет пройден первым транспортным средством, пересекает, упомянутый другой участок пути под каким-либо углом, то есть, например, не ограничиваясь, оба таких участка пути образуют Х-образный перекресток), упомянутые данные о точке обязательной децелерации будут включать такие координаты точки обязательной децелерации, в которых должно быть начато движение транспортного средства, по меньшей мере, без положительного ускорения либо, не ограничиваясь, с каким-либо пригодным отрицательным ускорением, причем такие координаты точки обязательной децелерации могут обеспечивать энергоэффективное движение транспортного средства по траектории, пересекающей упомянутый другой участок пути, и в то же время такое энергоэффективное движение транспортного средства будет являться безопасным, так как обеспечит требуемое снижение скорости движения транспортного средства перед прохождением опасного участка пути, на котором траектория движения транспортного средства может пересечься с траекторией движения другого транспортного средства, движущегося по упомянутому другому участку пути. Например, не ограничиваясь, когда упомянутый участок пути является участком пути, содержащем элемент инфраструктуры (например, не ограничиваясь, светофор, и/или камера контроля скорости, и/или камера контроля разметки) участка пути, регулирующий движение транспортных средств на участке пути, упомянутые данные о точке обязательной децелерации будут включать такие координаты точки обязательной децелерации, в которых должно быть начато движение транспортного средства, по меньшей мере, без положительного ускорения либо, не ограничиваясь, с каким-либо пригодным отрицательным ускорением, причем такие координаты точки обязательной децелерации могут обеспечивать энергоэффективное движение транспортного средства по траекториям, предполагающим существенное замедление или остановку транспортного средства в допустимом месте в соответствии с сигналами упомянутого элемента инфраструктуры участка пути, что, соответственно обеспечивает не только энергоэффективное замедление скорости движения транспортного средства, но и безопасность дорожного движения на участке пути. Например, не ограничиваясь, когда упомянутый участок пути является участком пути, содержащем знак дорожного движения (например, не ограничиваясь, знак, устанавливающий скорость движения на каком-либо отрезке участка пути, знак, предупреждающий о ремонтных работах на каком-либо отрезке участка пути, знак приоритета и тому подобные дорожные знаки каким-либо образом вынуждающие изменить скорость движения транспортного средства), упомянутые данные о точке обязательной децелерации будут включать такие координаты точки обязательной децелерации, в которых должно быть начато движение транспортного средства, по меньшей мере, без положительного ускорения либо, не ограничиваясь, с каким-либо пригодным отрицательным ускорением, причем такие координаты точки обязательной децелерации могут обеспечивать энергоэффективное движение транспортного средства по траекториям, предполагающим существенное замедление или остановку транспортного средства в допустимом месте в соответствии с требованиями правил дорожного движения, обусловленными наличием упомянутого знака дорожного движения, что, соответственно обеспечивает не только энергоэффективное замедление скорости движения транспортного средства, но и безопасность дорожного движения на участке пути; при этом данные о наличии такого упомянутого знака дорожного движения могут быть как предварительно ассоциированы с упомянутым участком пути на основании сведений из какой-либо внешней базы данных, либо могут быть считаны датчиками обстановки транспортного средства, в том числе, датчиками обстановки первого транспортного средства, например, не ограничиваясь, видеокамерой; при этом впоследствии такие данные могут быть использованы для формирования энергоэффективного трека эксплуатируемого (второго) транспортного средства. Например, не ограничиваясь, когда упомянутый участок пути является участком пути, содержащем препятствие (например, не ограничиваясь, постоянное препятствие, такое как, например, не ограничиваясь, искусственная неровность, или временное препятствие, такое, как например, повреждение дорожного полотна, ремонтные работы, обвал, дорожно-транспортное происшествие и тому подобные препятствия, вынуждающие изменить скорость движения транспортного средства), упомянутые данные о точке обязательной децелерации будут включать такие координаты точки обязательной децелерации, в которых должно быть начато движение транспортного средства с каким-либо пригодным отрицательным ускорением, причем такие координаты точки обязательной децелерации могут обеспечивать энергоэффективное движение транспортного средства по траекториям, предполагающим существенное замедление транспортного средства при прохождении или объезде препятствия в соответствии с требованиями правил дорожного движения, обусловленными наличием препятствия, что, соответственно обеспечивает не только энергоэффективное замедление скорости движения транспортного средства, но и безопасность дорожного движения на участке пути; при этом данные о наличии такого упомянутого препятствия могут быть как предварительно ассоциированы с упомянутым участком пути на основании сведений из какой-либо внешней базы данных, либо могут быть считаны датчиками обстановки транспортного средства, в том числе, датчиками обстановки первого транспортного средства, например, не ограничиваясь, видеокамерой; при этом впоследствии такие данные могут быть использованы для формирования энергоэффективного трека эксплуатируемого (второго) транспортного средства.
[0042] При этом дополнительно, не ограничиваясь, упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, также могут содержать одно из или какую-либо комбинацию из: данные о транспортном средстве, находящемся на упомянутом другом участке пути, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства. Такие дополнительные данные, предпочтительно, не ограничиваясь, позволяют сформировать энергоэффективные и безопасные расчетные треки транспортных средств в ситуациях, когда при движении в городской среде задействовано множество транспортных средств.
[0043] Например, не ограничиваясь, может быть обеспечено формирование расчетного трека транспортного средства в случае, когда упомянутыми данными о точке обязательной децелерации являются данные о точке обязательной децелерации на участке пути, с которым пересекается другой участок пути, и при этом упомянутые данные инфраструктуры упомянутого участка пути включают данные средства регулирования дорожного движения, сигнализирующие о допустимости движения без остановки путем пересечения упомянутого другого участка пути. При этом, не ограничиваясь, упомянутые данные средства регулирования дорожного движения, например, не ограничиваясь, светофора, сигнализируют о допустимости упомянутого движения без остановки для момента времени, когда упомянутое первое транспортное средство достигнет упомянутой точки обязательной децелерации. При этом, не ограничиваясь, может быть обеспечено формирование расчетного трека упомянутого первого транспортного средства, причем такое формирование, не ограничиваясь, включает расчет времени, требуемого для пересечения упомянутым первым транспортным средством упомянутого другого участка пути при движении упомянутого первого транспортного средства от упомянутой точки обязательной децелерации до точки завершения пересечения упомянутого другого участка пути. При этом такая упомянутая точка завершения пересечения упомянутого другого участка пути, предпочтительно, не ограничиваясь, не расположена на упомянутом другом участке пути и, предпочтительно, не ограничиваясь, расположена по направлению движения упомянутого первого транспортного средства по траектории, пересекающей упомянутый другой участок пути. Предпочтительно, не ограничиваясь, при этом по результатам упомянутого расчета времени обеспечивают формирование расчетного скоростного профиля упомянутого первого транспортного средства для упомянутого расчетного трека упомянутого первого транспортного средства, причем формируемый расчетный скоростной профиль включает, по меньшей мере, одно из: движение через упомянутую точку обязательной децелерации без изменения скорости движения упомянутого первого транспортного средства, движение через упомянутую точку обязательной децелерации с уменьшением скорости движения упомянутого первого транспортного средства до полной остановки в точке обязательной остановки, причем упомянутая точка обязательной остановки расположена по направлению движения упомянутого первого транспортного средства по траектории, не достигающей упомянутого другого участка пути, движение через упомянутую точку обязательной децелерации с увеличением скорости движения упомянутого первого транспортного средства таким образом, чтобы обеспечить пересечение первым транспортным средством упомянутого другого участка пути за время, соответствующее времени, полученному при упомянутом расчете времени, требуемого для упомянутого пересечения упомянутым первым транспортным средством упомянутого другого участка пути. При этом, предпочтительно, не ограничиваясь, когда по результатам упомянутого расчета времени получено, что транспортное средство в момент нахождения в точке обязательной децелерации будет двигаться в соответствии с предварительно заданным скоростным профилем и такое движение обеспечит беспрепятственное прохождение участка пути по траектории, пересекающей упомянутый другой участок пути, за время, достаточное до переключения сигнала средства регулирования движения (светофора), будет сформирован расчетный скоростной профиль, включающий, по меньшей мере, движение через упомянутую точку обязательной децелерации без изменения скорости движения упомянутого первого транспортного средства, либо, не ограничиваясь, без изменения предварительно заданного скоростного профиля транспортного средства. При этом, предпочтительно, не ограничиваясь, когда по результатам упомянутого расчета времени получено, что упомянутое транспортное средство в момент нахождения в точке обязательной децелерации будет двигаться в соответствии с предварительно заданным скоростным профилем и такое движение не обеспечит беспрепятственное прохождение участка пути по траектории, пересекающей упомянутый другой участок пути, за время, оставшееся до переключения сигнала средства регулирования движения (светофора), будет сформирован расчетный скоростной профиль, включающий, по меньшей мере, движение через упомянутую точку обязательной децелерации с уменьшением скорости движения упомянутого первого транспортного средства до полной остановки в точке обязательной остановки, которая будет расположена после точки обязательной децелерации по направлению движения транспортного средства и в пределах участка пути, по которому движется транспортное средство, то есть, до области, относящейся к упомянутому пересекаемому другому участку пути, то есть упомянутая точка обязательной остановки таким образом расположена по направлению движения упомянутого первого транспортного средства по траектории, не достигающей упомянутого другого участка пути. При этом, предпочтительно, не ограничиваясь, когда по результатам упомянутого расчета времени получено, что упомянутое транспортное средство в момент нахождения в точке обязательной децелерации будет двигаться в соответствии с предварительно заданным скоростным профилем и такое движение не обеспечит беспрепятственное прохождение участка пути по траектории, пересекающей упомянутый другой участок пути, за время, оставшееся до переключения сигнала средства регулирования движения (светофора), но при этом получено, что при допустимом увеличении скорости движения транспортного средства упомянутого времени, оставшегося до переключения упомянутого сигнала будет достаточно, будет сформирован расчетный скоростной профиль, включающий, по меньшей мере, движение (с допустимой на участке пути скоростью движения) транспортного средства через упомянутую точку обязательной децелерации с увеличением скорости движения упомянутого первого транспортного средства таким образом, чтобы обеспечить пересечение первым транспортным средством упомянутого другого участка пути за время, соответствующее времени, полученному при упомянутом расчете времени, требуемого для упомянутого пересечения упомянутым первым транспортным средством упомянутого другого участка пути. При этом, не ограничиваясь, при упомянутом формировании расчетного трека упомянутого первого транспортного средства учитывают одно из или комбинацию из: данные о транспортном средстве, находящемся на упомянутом другом участке пути, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства. Предпочтительно, не ограничиваясь, упомянутые данные о транспортных средствах, находящихся на упомянутом участке пути перед первым транспортным средством, перед эксплуатируемым (вторым) транспортным средством, а также находящиеся на упомянутых других участках пути, могут быть переданы и распространены в средах передачи данных, основанных на технологиях передачи и распространения данных «транспортное средство - транспортное средство» (V2V) и «транспортное средство - все» (V2X). При этом, не ограничиваясь, упомянутые данные прогноза могут быть получены посредством анализа упомянутой базы данных, формируемой, как это было описано со ссылкой на фиг. 7 и представлять собой, например, не ограничиваясь, данные статистики, например, не ограничиваясь в зависимости от времени, либо представлять собой результат обработки данных посредством способов и методов машинного обучения. Соответственно, при получении этих данных, формируемые расчетные треки первого транспортного средства, эксплуатируемого (второго) транспортного средства и всех последующих транспортных средств могут включать изменения предварительно заданных точек обязательной децелерации, дополнение участка пути точками акселерации, дополнения участка пути другими точками децелерации и тому подобными изменениями, обеспечивающими недопущение пересечения траекторий движения транспортных средств и при этом обеспечивающие их энергоэффективное перемещение по каким-либо образом связанным участкам пути или в рамках упомянутого участка пути.
[0044] Например, не ограничиваясь, также может быть обеспечено формирование расчетного трека транспортного средства в случае, когда упомянутыми данными о точке обязательной децелерации являются данные о точке обязательной децелерации на участке пути, с которым пересекается другой участок пути, и при этом упомянутые данные инфраструктуры упомянутого участка пути включают данные средства регулирования дорожного движения, сигнализирующие о недопустимости движения без остановки путем пересечения упомянутого другого участка пути. При этом упомянутые данные средства регулирования дорожного движения (светофора), предпочтительно, не ограничиваясь, получены для момента времени, когда упомянутое первое транспортное средство достигнет упомянутой точки обязательной децелерации. При этом, не ограничиваясь, может быть обеспечено формирование расчетного трека упомянутого первого транспортного средства, причем такое формирование включает получение данных о времени, когда данные упомянутого средства регулирования дорожного движения будут сигнализировать о допустимости движения без остановки путем пересечения упомянутого другого участка пути, и на основании упомянутых полученных данных времени обеспечивают, например, не ограничиваясь, изменение точки обязательной децелерации таким образом, чтобы было обеспечено движение упомянутого первого транспортного средства по траектории, пересекающей упомянутый другой участок пути, без остановки упомянутого первого транспортного средства в момент времени, когда данные упомянутого средства регулирования дорожного движения будут сигнализировать о допустимости движения без остановки путем пересечения упомянутого другого участка пути, за счет чего будет предотвращена нежелательная остановка транспортного средства и при этом обеспечена безопасность движения на участке пути. При этом, не ограничиваясь, может быть обеспечено, что упомянутые данные, ассоциированные с участком пути, по меньшей мере, включают данные о нескольких точках обязательной децелерации. При этом, не ограничиваясь, упомянутые данные о точках обязательной децелерации представляют собой данные о точках обязательной децелерации на упомянутом участке пути, расположенные соответственно перед несколькими другими участками пути, с которыми пересекается упомянутый участок пути. При этом, не ограничиваясь, с каждым соответствующим упомянутым другим участком пути ассоциированы соответствующие упомянутые данные средства регулирования дорожного движения. В таком случае, не ограничиваясь, упомянутые ранее действия, касающиеся получения времени, расчета времени, изменения точки обязательной децелерации могут быть выполнены для каждой из упомянутых точек обязательной децелерации таким образом, чтобы было обеспечено движение упомянутого первого транспортного средства по соответствующим траекториям, пересекающим соответствующие упомянутые другие участки пути, без остановки упомянутого транспортного средства в момент времени, когда соответствующие упомянутые данные упомянутых средств регулирования дорожного движения сигнализируют о допустимости движения без остановки путем пересечения соответствующего упомянутого другого участка пути.
[0045] Например, не ограничиваясь, также может быть обеспечено формирование расчетного трека транспортного средства в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, данные о транспортном средстве, находящемся на упомянутом другом участке пути. При этом, не ограничиваясь, может быть обеспечено получение трека упомянутого транспортного средства, находящегося на упомянутом другом участке пути, причем упомянутый трек такого транспортного средства, не ограничиваясь, может включать, по меньшей мере, данные, ассоциированные с участком пути, по которому движется такое транспортное средство (то есть с другим участком пути), при этом такие ассоциированные с участком пути данные, не ограничиваясь, включают данные о траектории движения такого транспортного средства, находящегося на упомянутом другом участке пути. При этом, не ограничиваясь, данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно могут включать данные о траектории движения первого транспортного средства. При этом, не ограничиваясь, когда упомянутые данные траекторий движения включают данные о точке пересечения траектории движения первого транспортного средства с траекторией движения упомянутого транспортного средства, находящегося на упомянутом другом участке пути, может быть обеспечено изменение упомянутой точки обязательной децелерации таким образом, чтобы исключить одновременное нахождение первого транспортного средства и упомянутого транспортного средства, находящегося на упомянутом другом участке пути, в упомянутой точке пересечения траекторий движения, и при этом обеспечить движение упомянутого первого транспортного средства по упомянутой траектории движения упомянутого первого транспортного средства без остановки, благодаря чему может быть обеспечено безопасное и в то же время энергоэффективное движение транспортных средств на упомянутом участке пути.
[0046] Например, не ограничиваясь, также может быть обеспечено формирование расчетного трека транспортного средства в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней. В таком случае, предпочтительно, не ограничиваясь, может быть обеспечено получение трека такого транспортного средства, которое таким образом расположено по направлению движения первого транспортного средства, может быть обеспечено изменение упомянутой точки обязательной децелерации таким образом, чтобы было обеспечено формирование расчетного трека упомянутого первого транспортного средства, соответствующего упомянутому треку транспортного средства, находящегося на упомянутом участке пути в точке обязательной децелерации или рядом с ней, при движении упомянутого первого транспортного средства по упомянутому участку пути со скоростью движения, меньшей, чем скорость движения упомянутого транспортного средства, находящегося на упомянутом участке пути в точке обязательной децелерации или рядом с ней, что таким образом обеспечит недопущение одновременного нахождения упомянутых транспортных средств в пределах участка пути в одной и той же точке.
[0047] Например, не ограничиваясь, упомянутые данные ассоциированные с участком пути, который будет пройден первым транспортным средством, могут дополнительно включать, по меньшей мере, одно из или комбинацию из: данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства. При этом, например, не ограничиваясь, в случае, когда упомянутые данные ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные прогноза нахождения на упомянутом другом участке пути транспортного средства, обеспечивают получение прогноза трека упомянутого транспортного средства, которое может находится на упомянутом другом участке пути. При этом, не ограничиваясь, упомянутый прогноз трека такого транспортного средства может включать, по меньшей мере, данные, ассоциированные с участком пути, по которому может двигаться такое транспортное средство, и при этом, не ограничиваясь, такие ассоциированные с участком пути данные могут включать данные о прогнозе траектории движения такого транспортного средства, которое может находиться на упомянутом другом участке пути. При этом, не ограничиваясь, данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно могут включать данные о траектории движения первого транспортного средства, при этом, не ограничиваясь, в случае, когда упомянутые данные траектории движения первого транспортного средства и данные о прогнозе траектории движения транспортного средства, которое может находиться на упомянутом другом участке пути, включают данные о точке пересечения траектории движения первого транспортного средства с прогнозируемой траекторией движения упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, может быть обеспечено соответствующее изменение упомянутой точки обязательной децелерации таким образом, чтобы исключить одновременное нахождение первого транспортного средства и упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, в упомянутой точке пересечения упомянутой траектории движения первого транспортного средства и упомянутой прогнозируемой траектории движения транспортного средства, которое может находиться на упомянутом другом участке пути. Причем, предпочтительно, не ограничиваясь, может быть обеспечено движение упомянутого первого транспортного средства по упомянутой траектории движения упомянутого первого транспортного средства без остановки. В тоже время, при этом, не ограничиваясь, в случае, когда упомянутые данные ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства, также может быть обеспечено получение прогноза трека такого транспортного средства и обеспечено изменение упомянутой точки обязательной децелерации таким образом, чтобы было обеспечено формирование расчетного трека упомянутого первого транспортного средства, соответствующего упомянутому прогнозу трека транспортного средства, которое может находиться на упомянутом участке пути, который будет пройден первым транспортным средством, в точке обязательной децелерации или рядом с ней, при движении упомянутого первого транспортного средства по упомянутому участку пути со скоростью движения, меньшей, чем скорость движения упомянутого транспортного средства, которое может находиться на упомянутом участке пути, который будет пройден первым транспортным средством, в точке обязательной децелерации или рядом с ней.
[0048] При этом, не ограничиваясь, описанные выше способы и методы могут быть использованы, в частности, для формирования наиболее оптимального расчетного трека упомянутого первого транспортного средства. При этом, не ограничиваясь, анализ энергоэффективности фактического трека упомянутого транспортного средства формируется способом, как это было показано ранее, причем по результатам анализа, когда будет сформирован расчетный трек эксплуатируемого (второго) транспортного средства, может быть обеспечено использование тех же дополнительных данных, ассоциированных с участком пути, которые были использованы при формировании расчетного трека первого транспортного средства, либо, например, не ограничиваясь, какие-либо данные могут быть проигнорированы в связи с тем, что не были подтверждены при фактическом прохождении участка пути первым транспортным средством. Соответственно, не ограничиваясь, эксплуатируемое (второе) транспортное средство также может выступить в роли первого транспортного средства для последующих транспортных средств, которые будут двигаться по упомянутому участку пути, с которым ассоциированы упомянутые дополнительные данные и точки обязательной децелерации. Таким образом может быть обеспечено постоянное формирование наиболее энергоэффективного и безопасного трека для последующих транспортных средств, а полученные данные и расчетные треки могут быть накоплены в упомянутой базе данных и использованы в дальнейшем, например, не ограничиваясь, для моделирования и формирования все более оптимального энергоэффективного и безопасного трека.
[0049] На фиг. 8 в качестве примера, но не ограничения, представлена примерная схема системы 200 формирования энергоэффективного трека транспортного средства. Например, не ограничиваясь, заявленная система 200 содержит упомянутый сервер 203, связанный, по меньшей мере, с упомянутыми приемо-передатчиками 2011, 2021 первого транспортного средства 201 и эксплуатируемого (второго) транспортного средства 202, соответственно. При этом, не ограничиваясь, упомянутый сервер 203 представляет собой компьютерное устройство, содержащее, по меньшей мере, процессор 2031 и память 2032. При этом, не ограничиваясь, память (машиночитаемый носитель данных) сервера 203 содержит код программы, который при выполнении процессором побуждает процессор выполнять действия описанного ранее способа формирования энергоэффективного трека транспортного средства. В качестве примера, но не ограничения, машиночитаемый носитель данных (память 2031) может включать в себя энергонезависимую память (NVRAM); оперативную память (RAM); постоянное запоминающее устройство (ROM); электрически-стираемое программируемое постоянное запоминающее устройство (EEPROM); флэш-память или другие технологии памяти; CDROM, цифровой универсальный диск (DVD) или другие оптические или голографические носители данных; магнитные кассеты, магнитную пленку, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства; а также любой другой носитель данных, который может быть использован для хранения и кодирования требуемой информации. При этом, не ограничиваясь, память 2032 включает в себя носитель данных на основе запоминающего устройства компьютера в форме энергозависимой или энергонезависимой памяти, или их комбинации. При этом, не ограничиваясь, примерные аппаратные устройства включают в себя твердотельную память, накопители на жестких дисках, накопители на оптических дисках и так далее. При этом, не ограничиваясь, машиночитаемый носитель данных (память 2032) является не временным (постоянным, нетранзитивным), так что он не включает временный (транзитивный) распространяющийся сигнал. При этом, не ограничиваясь, в памяти 2032 может храниться примерная среда, в которой при помощи компьютерных команд или кодов, хранящихся в памяти сервера, может быть осуществлена процедура формирования энергоэффективного трека транспортного средства. При этом, не ограничиваясь, сервер 203 содержит один или более процессоров 2031, которые предназначены для выполнения компьютерных команд или кодов, хранящихся в памяти 2032 устройства с целью обеспечения выполнения процедуры формирования энергоэффективного трека транспортного средства. При этом, не ограничиваясь, система 200 также может включать в себя базу данных (БД) 204. БД 204 может представлять собой, но не ограничиваясь: иерархическую БД, сетевую БД, реляционную БД, объектную БД, объектно-ориентированную БД, объектно-реляционную БД, пространственную БД, комбинацию перечисленных двух и более БД, и тому подобное. При этом, не ограничиваясь, БД 204 хранит данные для анализа в памяти 2032 или в памяти иного компьютерного устройства, связанного с сервером 203, которая может представлять собой, но не ограничиваясь, память, аналогичную какой-либо памяти 2032, как это было показано ранее, и к которому может быть осуществлен доступ посредством сервера 203. При этом, не ограничиваясь, БД 204 служит для хранения данных, представляющих собой, по меньшей мере, команды для выполнения этапов способа 100, описанных ранее; подвергнутые обработке данные, ассоциированные с первым транспортным средством и/или с эксплуатируемым (вторым) транспортным средством и/или с участком пути, в том числе уточненные; расчетные и формируемые треки каких-либо транспортных средств; навигационные данные; эталонные треки каких-либо транспортных средств; и тому подобное. При этом, не ограничиваясь, примерная система 200 также содержит, соответственно, по меньшей мере, первое транспортное средство 201 и эксплуатируемое (второе) транспортное средство 202. Эти транспортные средства 201, 202, как правило, содержат соответствующий приемо-передатчик 2011, 2021, выполненный с возможностью передавать данные на сервер 203, связанный с системой управления движением 2012, 2022 соответствующего транспортного средства и/или бортовой информационной системой 2013, 2023 (при наличии) соответствующего транспортного средства. Необязательно такие транспортные средства содержат различного-рода датчики 2014, 2024 для сбора каких-либо данных, ассоциированных с соответствующим транспортным средством и/или ассоциированных с участком пути. При этом, не ограничиваясь, такими датчиками 2014, 2024 являются датчик позиционирования, датчики скорости (например, не ограничиваясь, датчики положения коленчатого вала, положения распределительного вала, положения дроссельной заслонки, положения педали акселератора, частоты вращения колеса, скорости вращения колеса, потребляемой мощности - цикловой подачи или вольтамперной характеристики), датчики расхода энергии (например, не ограничиваясь, датчики уровня топлива, уровня заряда аккумуляторной батареи, положения педали акселератора, объема цикловой подачи и оборотов двигателя), данные датчиков температуры (например, не ограничиваясь, датчики температуры охлаждающей жидкости, температуры наружного воздуха, температуры воздуха в салоне), данные датчиков давления (например, не ограничиваясь, датчики давления во впускном коллекторе, давления топлива в системе впрыска, давления в шинах), данные датчиков обстановки (например, не ограничиваясь, датчик света, датчик дождя, радар, лидар, видеокамера, сонар), а также данные состояний датчиков, сенсоров и элементов управления скоростью движения транспортного средства, а также прочих элементов системы управления движением транспортного средства. Помимо этого, не ограничиваясь, обеспечивается сервер 203, который помимо описанных ранее функций, сохраняет и содействует манипуляции компьютерными командами или кодами, ранее описанными в данном документе, которые, соответственно, дополнительно не описываются. При этом, не ограничиваясь, сервер 203, помимо описанных ранее функций, может обеспечивать регулирование обменом данных в системе 200. При этом, не ограничиваясь, обмен данными внутри системы 200 осуществляется благодаря одной или более сетей 205 передачи данных. При этом, не ограничиваясь, сети 205 передачи данных могут включать в себя, но не ограничиваться, одну или более локальных сетей (LAN) и/или глобальных сетей (WAN), или могут представлять собой информационно-телекоммуникационную сеть Интернет, или Интранет, или виртуальную частную сеть (VPN), или их комбинацию, и тому подобное. При этом, не ограничиваясь, сервер 203 также имеет возможность обеспечивать виртуальную вычислительную среду для обеспечения взаимодействия между компонентами системы. При этом, не ограничиваясь, сеть 205 служит для обеспечения взаимодействия между приемо-передатчиками 2011, 2021 транспортных средств 201, 202, сервером 203 и необязательно базой данных 204. При этом, не ограничиваясь, сервер 203 и база данных 204 могут быть связаны напрямую, используя известные из уровня техники проводные и беспроводные способы и методы связи, которые, соответственно, далее подробно не описываются. При этом, не ограничиваясь, необязательно система 200 также может содержать элементы 206 инфраструктуры участка пути, которые представляют собой различные технические средства, пригодные для сбора упомянутых данных, ассоциированных с транспортными средствами и/или участком пути, а также необязательно могут обеспечивать упомянутую сеть 205 передачи данных на участке пути. В качестве примера, но не ограничения, такими элементами 206 являются: метеостанция, камера контроля скорости, приемо-передатчик инфраструктуры участка пути, датчики веса дорожного полотна и тому подобное, а также данные других транспортных средств, которые могут быть задействованы или не задействованы в системе 200, передаваемые и распространяемые в средах передачи данных, основанных на технологиях передачи и распространения данных «транспортное средство - транспортное средство» (V2V) и «транспортное средство - все» (V2X). При этом, не ограничиваясь, одна из упомянутых бортовых информационных систем 2013, 2023, в случае когда является компьютерным устройством, содержащим процессор и память, аналогичные упомянутым процессору 2031 и памяти 2032, может представлять собой упомянутый сервер 203 и обладать присущими ему функциями, причем в таком случае упомянутые приемопередатчики 2011, 2012 могут быть связаны между собой посредством какой-либо сети передачи данных или напрямую посредством беспроводной линии связи, коей может быть, не ограничиваясь, линия радиосвязи, линия акустической связи, линия инфракрасной связи, линия лазерной связи и тому подобное, причем в таком случае упомянутая БД 204 может быть реализована непосредственно в упомянутой памяти бортовой информационной системы 2013 или 2023 (при наличии). При этом, не ограничиваясь, упомянутые транспортные средства, не являющиеся первым, эксплуатируемым или вторым транспортными средствами, а находящиеся, например, на упомянутых других участках пути, могут представлять собой транспортные средства, аналогичные упомянутым транспортным средствам 201, 202 и, соответственно, могут иметь аналогичные упомянутые приемо-передатчики, системы управления движением, бортовые информационные системы и тому подобное оборудование.
[0050] Настоящее описание осуществления заявленного изобретения демонстрирует лишь частные варианты осуществления и не ограничивает иные варианты реализации заявленного изобретения, поскольку возможные иные альтернативные варианты осуществления заявленного изобретения, не выходящие за пределы объема информации, изложенной в настоящей заявке, должны быть очевидными для специалиста в данной области техники, имеющего обычную квалификацию, на которого рассчитано заявленное изобретение.
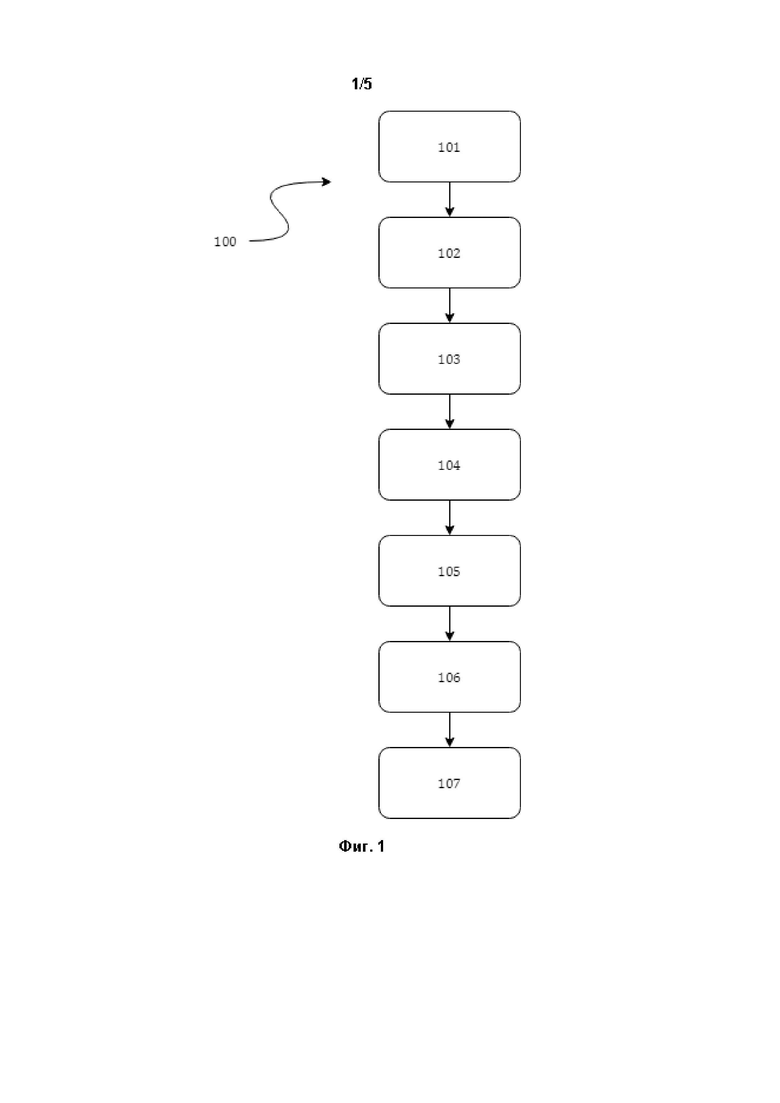
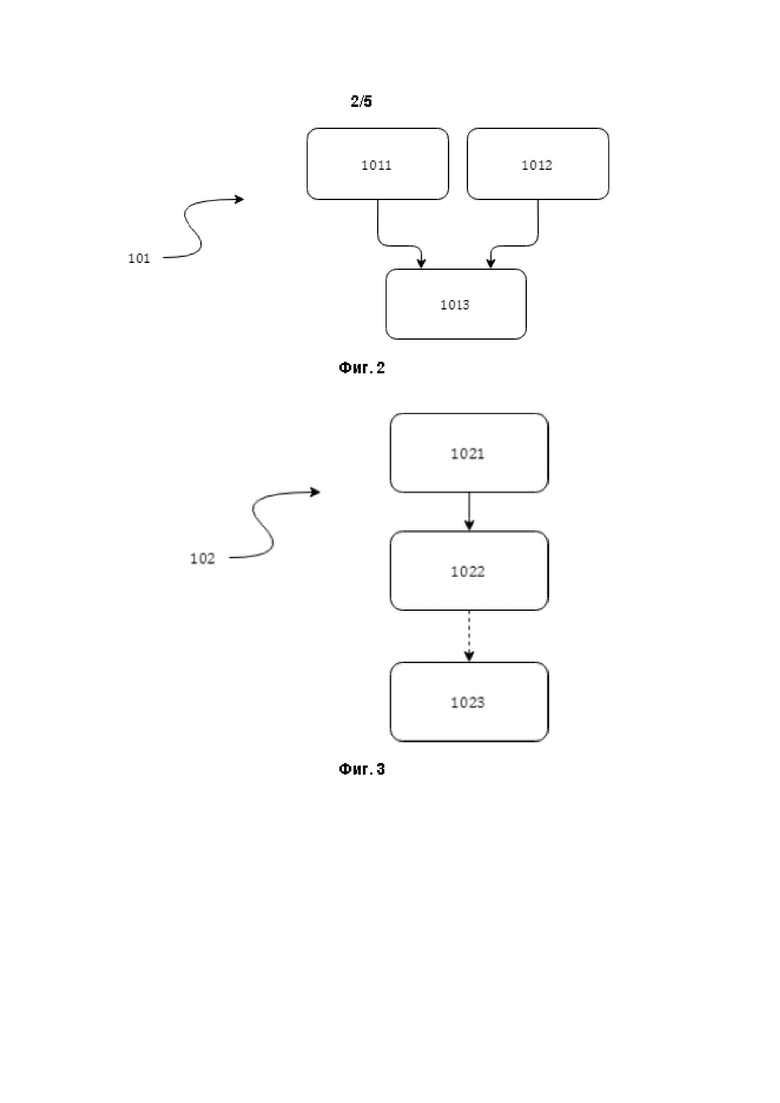
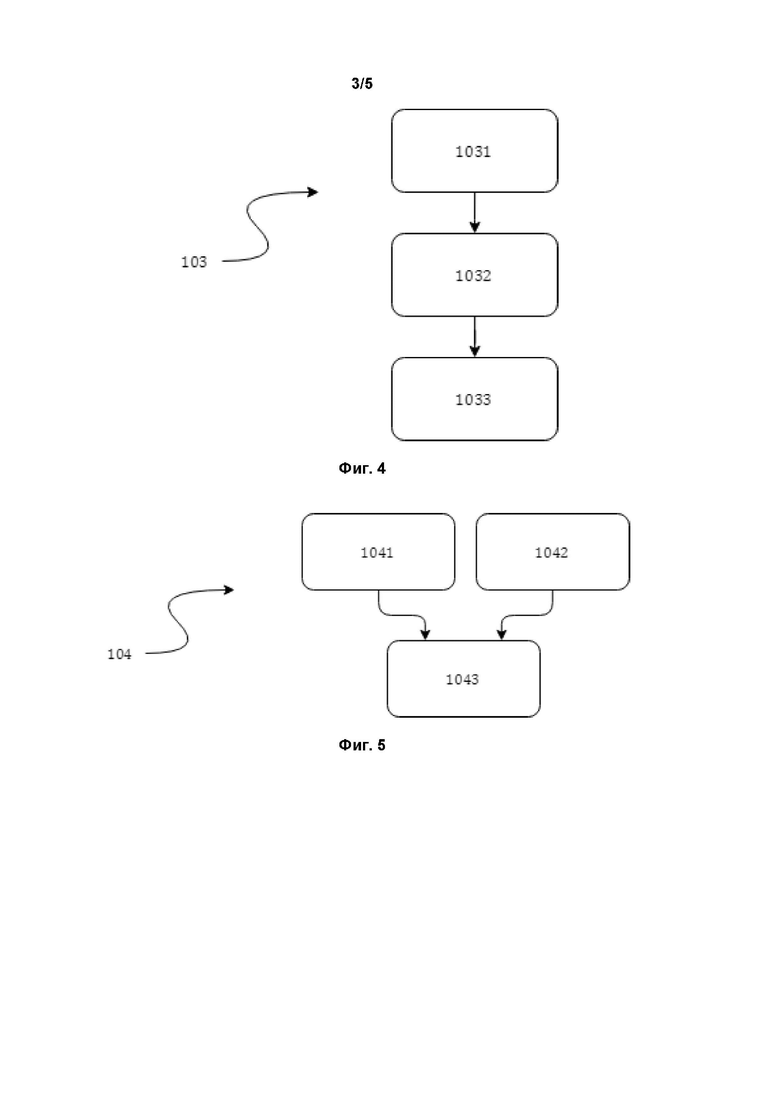
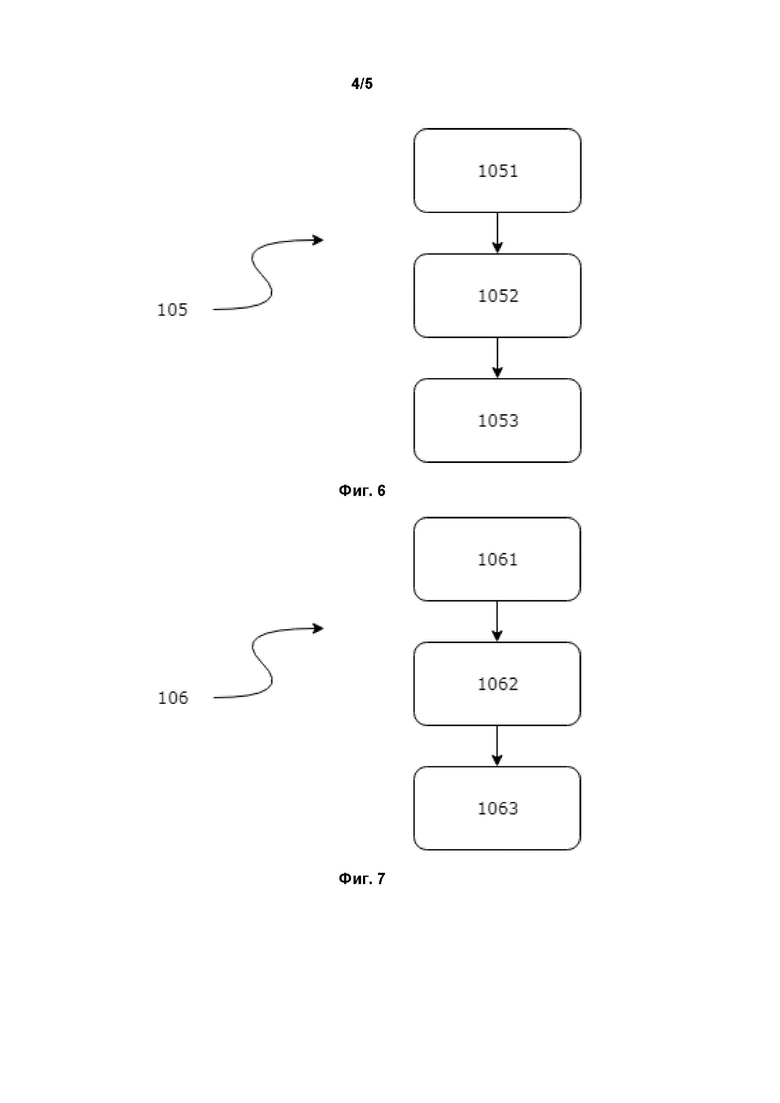
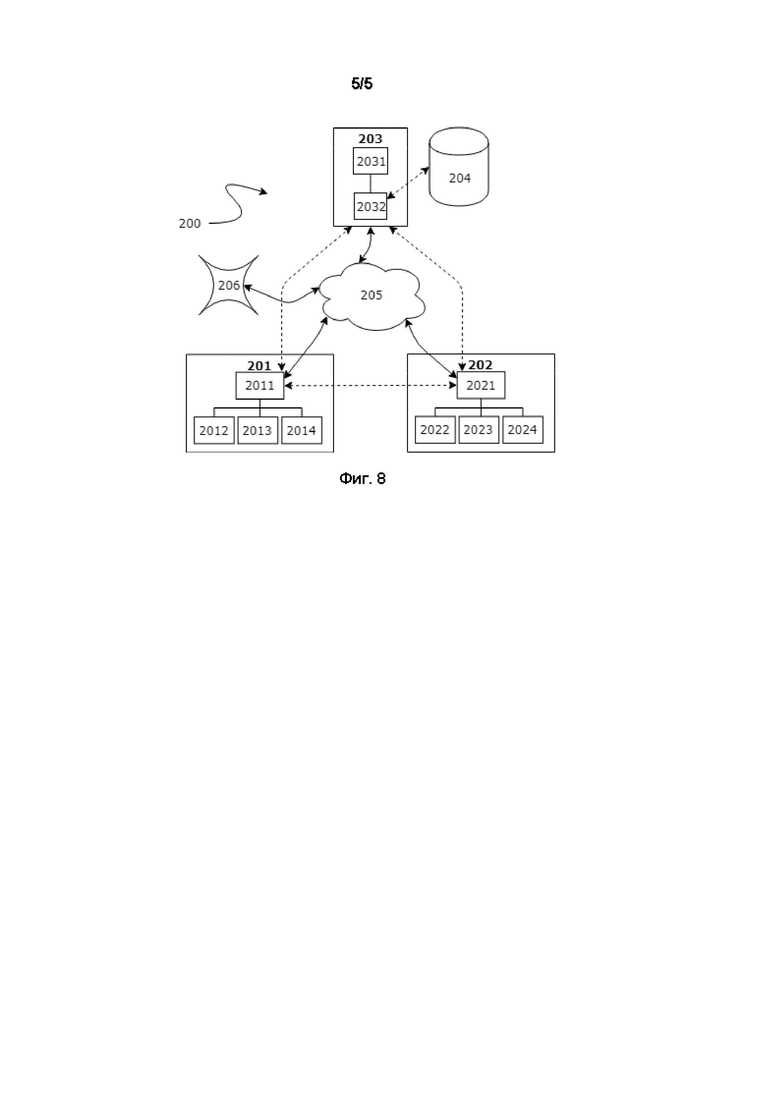
Изобретение относится к способу формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной децелерации. Способ формирования энергоэффективного трека эксплуатируемого транспортного средства при движении транспортного средства по участку пути, включающему точку обязательной децелерации, заключается в выполнении этапов сбора первичных данных, сбора вторичных данных, формирования расчетного трека второго транспортного средства на основании полученного трека первого транспортного средства. Формирование трека первого транспортного средства заключается в выполнении этапов формирования скоростного профиля первого транспортного средства на пройденном участке пути, оценки энергоэффективности первого транспортного средства на пройденном участке пути. Данные о точке обязательной децелерации включают одно из и/или комбинацию из: данные о точке обязательной децелерации на участке пути, к которому прилегает или с которым пересекается другой участок пути, данные о точке обязательной децелерации на участке пути, содержащем элемент инфраструктуры участка пути, регулирующий движение транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем знак дорожного движения, ограничивающий скорость движения транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем препятствие. Достигается повышение энергоэффективности движения транспортного средства. 2 н. и 18 з.п. ф-лы, 8 ил.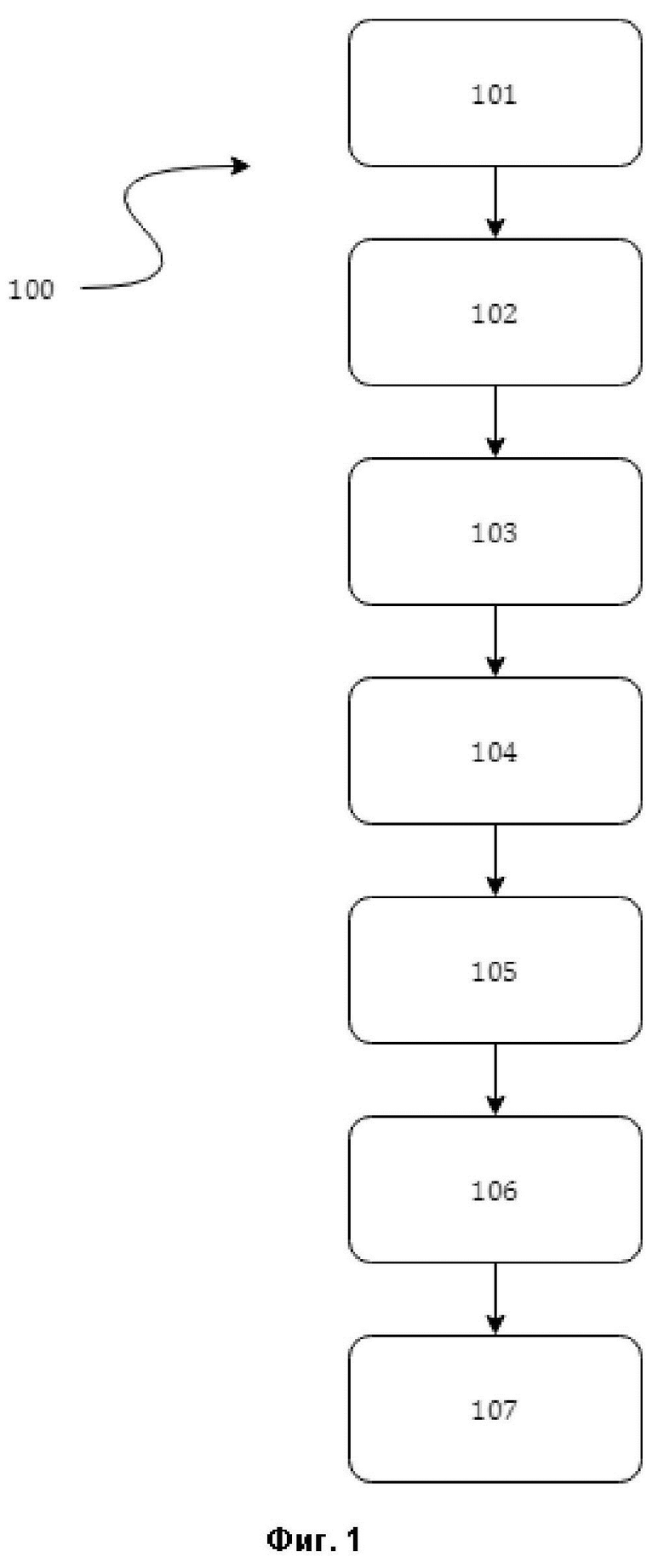
1. Исполняемый процессором компьютерного устройства способ формирования энергоэффективного трека эксплуатируемого транспортного средства при движении транспортного средства по участку пути, включающему точку обязательной децелерации, заключающийся, по меньшей мере, в выполнении этапов:
этапа сбора первичных данных, заключающегося в получении данных, ассоциированных с первым транспортным средством; данных, ассоциированных с участком пути, который будет пройден первым транспортным средством; и данных, ассоциированных со вторым транспортным средством, причем такое второе транспортное средство является эксплуатируемым транспортным средством и пройдет упомянутый участок пути позже первого транспортного средства; причем упомянутые данные, ассоциированные с участком пути, по меньшей мере, включают данные о точке обязательной децелерации;
этапа сбора вторичных данных, заключающегося в получении трека первого транспортного средства, причем упомянутый трек формируется по результатам прохождения первым транспортным средством упомянутого участка пути с учетом упомянутых данных о точке обязательной децелерации;
этапа формирования расчетного трека второго транспортного средства, причем формирование упомянутого расчетного трека второго транспортного средства осуществляется на основании упомянутого полученного трека первого транспортного средства;
при этом формирование трека первого транспортного средства заключается в выполнении следующих этапов:
этапа формирования скоростного профиля первого транспортного средства на пройденном участке пути;
этапа оценки энергоэффективности первого транспортного средства на пройденном участке пути;
при этом упомянутые данные о точке обязательной децелерации включают одно из и/или комбинацию из: данные о точке обязательной децелерации на участке пути, к которому прилегает или с которым пересекается другой участок пути, данные о точке обязательной децелерации на участке пути, содержащем элемент инфраструктуры участка пути, регулирующий движение транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем знак дорожного движения, ограничивающий скорость движения транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем препятствие.
2. Способ по п. 1, характеризующийся тем, что упомянутые данные, ассоциированные с первым и/или вторым транспортным средством, представляют собой, по меньшей мере, одно из и/или комбинацию из: вид и тип первого транспортного средства; масса первого транспортного средства; аэродинамические характеристики первого транспортного средства; колесная формула первого транспортного средства; расчетные и/или фактические данные о расходе энергии первым транспортным средством и данные датчиков ускорения и/или скорости первого транспортного средства; данные датчиков позиционирования первого транспортного средства, датчиков веса первого транспортного средства и датчиков вращения колес первого транспортного средства.
3. Способ по п. 1, характеризующийся тем, что упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, одно из и/или комбинацию из данных внешних источников: данные о геометрии упомянутого участка пути, данные об уклоне дороги на упомянутом участке пути, данные о скоростном режиме на упомянутом на участке пути, данные о качестве дорожного покрытия на упомянутом участке пути, данные о наличии ограничений скорости движения на упомянутом участке пути, данные о наличии поворотов на упомянутом участке пути, данные о погодных условиях на упомянутом участке пути, данные инфраструктуры упомянутого участка пути, данные о транспортном средстве, находящемся на упомянутом другом участке пути, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства.
4. Способ по п. 3, характеризующийся тем, что в случае, когда упомянутыми данными о точке обязательной децелерации являются данные о точке обязательной децелерации на участке пути, с которым пересекается другой участок пути, и при этом упомянутые данные инфраструктуры упомянутого участка пути включают данные средства регулирования дорожного движения, сигнализирующие о допустимости движения без остановки путем пересечения упомянутого другого участка пути в момент времени, когда упомянутое первое транспортное средство достигнет упомянутой точки обязательной децелерации, обеспечивают формирование расчетного трека упомянутого первого транспортного средства, причем такое формирование включает расчет времени, требуемого для пересечения упомянутым первым транспортным средством упомянутого другого участка пути при движении упомянутого первого транспортного средства от упомянутой точки обязательной децелерации до точки завершения пересечения упомянутого другого участка пути, причем такая точка завершения пересечения упомянутого другого участка пути не расположена на упомянутом другом участке пути и расположена по направлению движения упомянутого первого транспортного средства по траектории, пересекающей упомянутый другой участок пути, при этом по результатам упомянутого расчета времени обеспечивают формирование расчетного скоростного профиля упомянутого первого транспортного средства для упомянутого расчетного трека упомянутого первого транспортного средства, причем формируемый расчетный скоростной профиль включает, по меньшей мере, одно из: движение через упомянутую точку обязательной децелерации без изменения скорости движения упомянутого первого транспортного средства, движение через упомянутую точку обязательной децелерации с уменьшением скорости движения упомянутого первого транспортного средства до полной остановки в точке обязательной остановки, причем упомянутая точка обязательной остановки расположена по направлению движения упомянутого первого транспортного средства по траектории, не достигающей упомянутого другого участка пути, движение через упомянутую точку обязательной децелерации с увеличением скорости движения упомянутого первого транспортного средства таким образом, чтобы обеспечить пересечение первым транспортным средством упомянутого другого участка пути за время, соответствующее времени, полученному при упомянутом расчете времени, требуемого для упомянутого пересечения упомянутым первым транспортным средством упомянутого другого участка пути.
5. Способ по п. 4, характеризующийся тем, что при упомянутом формировании расчетного трека упомянутого первого транспортного средства учитывают одно из или комбинацию из: данные о транспортном средстве, находящемся на упомянутом другом участке пути, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства.
6. Способ по п. 3, характеризующийся тем, что в случае, когда упомянутыми данными о точке обязательной децелерации являются данные о точке обязательной децелерации на участке пути, с которым пересекается другой участок пути, и при этом упомянутые данные инфраструктуры упомянутого участка пути включают данные средства регулирования дорожного движения, сигнализирующие о недопустимости движения без остановки путем пересечения упомянутого другого участка пути в момент времени, когда упомянутое первое транспортное средство достигнет упомянутой точки обязательной децелерации, обеспечивают формирование расчетного трека упомянутого первого транспортного средства, причем такое формирование включает получение данных о времени, когда данные упомянутого средства регулирования дорожного движения будут сигнализировать о допустимости движения без остановки путем пересечения упомянутого другого участка пути, и на основании упомянутых полученных данных времени обеспечивают изменение точки обязательной децелерации таким образом, чтобы было обеспечено движение упомянутого первого транспортного средства по траектории, пересекающей упомянутый другой участок пути, без остановки упомянутого первого транспортного средства в момент времени, когда данные упомянутого средства регулирования дорожного движения сигнализируют о допустимости движения без остановки путем пересечения упомянутого другого участка пути.
7. Способ по 6, характеризующийся тем, что упомянутые данные, ассоциированные с участком пути, по меньшей мере, включают данные о нескольких точках обязательной децелерации, при этом упомянутые данные о точках обязательной децелерации представляют собой данные о точках обязательной децелерации на упомянутом участке пути, расположенные соответственно перед несколькими другими участками пути, с которыми пересекается упомянутый участок пути, при этом с каждым соответствующим упомянутым другим участком пути ассоциированы соответствующие упомянутые данные средства регулирования дорожного движения, при этом действия упомянутого способа по п. 6 выполняются для каждой из упомянутых точек обязательной децелерации таким образом, чтобы было обеспечено движение упомянутого первого транспортного средства по соответствующим траекториям, пересекающим соответствующие упомянутые другие участки пути, без остановки упомянутого транспортного средства в момент времени, когда соответствующие упомянутые данные упомянутых средств регулирования дорожного движения сигнализируют о допустимости движения без остановки путем пересечения соответствующего упомянутого другого участка пути.
8. Способ по п. 3, характеризующийся тем, что в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, данные о транспортном средстве, находящемся на упомянутом другом участке пути, обеспечивают получение трека упомянутого транспортного средства, находящегося на упомянутом другом участке пути, причем упомянутый трек такого транспортного средства включает, по меньшей мере, данные, ассоциированные с участком пути, по которому движется такое транспортное средство, при этом такие ассоциированные с участком пути данные включают данные о траектории движения такого транспортного средства, находящегося на упомянутом другом участке пути, при этом данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные о траектории движения первого транспортного средства, при этом в случае, когда упомянутые данные траекторий движения включают данные о точке пересечения траектории движения первого транспортного средства с траекторией движения упомянутого транспортного средства, находящегося на упомянутом другом участке пути, обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы исключить одновременное нахождение первого транспортного средства и упомянутого транспортного средства, находящегося на упомянутом другом участке пути, в упомянутой точке пересечения траекторий движения, и при этом обеспечить движение упомянутого первого транспортного средства по упомянутой траектории движения упомянутого первого транспортного средства без остановки.
9. Способ по п. 3, характеризующийся тем, что в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, обеспечивают получение трека такого транспортного средства и обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы было обеспечено формирование расчетного трека упомянутого первого транспортного средства, соответствующего упомянутому треку транспортного средства, находящегося на упомянутом участке пути в точке обязательной децелерации или рядом с ней, при движении упомянутого первого транспортного средства по упомянутому участку пути со скоростью движения, меньшей, чем скорость движения упомянутого транспортного средства, находящегося на упомянутом участке пути в точке обязательной децелерации или рядом с ней.
10. Способ по п. 3, характеризующийся тем, что упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, одно из или комбинацию из: данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства; при этом в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные прогноза нахождения на упомянутом другом участке пути транспортного средства, обеспечивают получение прогноза трека упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, причем упомянутый прогноз трека такого транспортного средства включает, по меньшей мере, данные, ассоциированные с участком пути, по которому может двигаться такое транспортное средство, при этом такие ассоциированные с участком пути данные включают данные о прогнозе траектории движения такого транспортного средства, которое может находиться на упомянутом другом участке пути, при этом данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные о траектории движения первого транспортного средства, при этом в случае, когда упомянутые данные траектории движения первого транспортного средства и данные о прогнозе траектории движения транспортного средства, которое может находиться на упомянутом другом участке пути, включают данные о точке пересечения траектории движения первого транспортного средства с прогнозируемой траекторией движения упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы исключить одновременное нахождение первого транспортного средства и упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, в упомянутой точке пересечения упомянутой траектории движения первого транспортного средства и упомянутой прогнозируемой траектории движения транспортного средства, которое может находиться на упомянутом другом участке пути, и при этом обеспечить движение упомянутого первого транспортного средства по упомянутой траектории движения упомянутого первого транспортного средства без остановки; при этом, когда в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства, обеспечивают получение прогноза трека такого транспортного средства и обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы было обеспечено формирование расчетного трека упомянутого первого транспортного средства, соответствующего упомянутому прогнозу трека транспортного средства, которое может находиться на упомянутом участке пути, который будет пройден первым транспортным средством, в точке обязательной децелерации или рядом с ней, при движении упомянутого первого транспортного средства по упомянутому участку пути со скоростью движения, меньшей, чем скорость движения упомянутого транспортного средства, которое может находиться на упомянутом участке пути, который будет пройден первым транспортным средством, в точке обязательной децелерации или рядом с ней.
11. Машиночитаемый носитель данных, содержащий код программы, который при выполнении процессором компьютерного устройства побуждает процессор выполнять действия способа формирования энергоэффективного трека эксплуатируемого транспортного средства при движении транспортного средства по участку пути, включающему точку обязательной децелерации, заключающегося, по меньшей мере, в выполнении этапов:
этапа сбора первичных данных, заключающегося в получении данных, ассоциированных с первым транспортным средством; данных, ассоциированных с участком пути, который будет пройден первым транспортным средством; и данных, ассоциированных со вторым транспортным средством, причем такое второе транспортное средство является эксплуатируемым транспортным средством и пройдет упомянутый участок пути позже первого транспортного средства; причем упомянутые данные, ассоциированные с участком пути, по меньшей мере, включают данные о точке обязательной децелерации;
этапа сбора вторичных данных, заключающегося в получении трека первого транспортного средства, причем упомянутый трек формируется по результатам прохождения первым транспортным средством упомянутого участка пути;
этапа формирования расчетного трека второго транспортного средства, причем формирование упомянутого расчетного трека второго транспортного средства осуществляется на основании упомянутого полученного трека первого транспортного средства;
при этом формирование трека первого транспортного средства заключается в выполнении следующих этапов:
этапа формирования скоростного профиля первого транспортного средства на пройденном участке пути;
этапа оценки энергоэффективности первого транспортного средства на пройденном участке пути;
при этом упомянутые данные о точке обязательной децелерации включают одно из и/или комбинацию из: данные о точке обязательной децелерации на участке пути, к которому прилегает или с которым пересекается другой участок пути, данные о точке обязательной децелерации на участке пути, содержащем элемент инфраструктуры участка пути, регулирующий движение транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем знак дорожного движения, ограничивающий скорость движения транспортных средств на участке пути, данные о точке обязательной децелерации на участке пути, содержащем препятствие.
12. Носитель по п. 11, характеризующийся тем, что упомянутые данные, ассоциированные с первым и/или вторым транспортным средством, представляют собой, по меньшей мере, одно из и/или комбинацию из: вид и тип первого транспортного средства; масса первого транспортного средства; аэродинамические характеристики первого транспортного средства; колесная формула первого транспортного средства; расчетные и/или фактические данные о расходе энергии первым транспортным средством и данные датчиков ускорения и/или скорости первого транспортного средства; данные датчиков позиционирования первого транспортного средства, датчиков веса первого транспортного средства и датчиков вращения колес первого транспортного средства.
13. Носитель по п. 11, характеризующийся тем, что упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, одно из и/или комбинацию из данных внешних источников: данные о геометрии упомянутого участка пути, данные об уклоне дороги на упомянутом участке пути, данные о скоростном режиме на упомянутом на участке пути, данные о качестве дорожного покрытия на упомянутом участке пути, данные о наличии ограничений скорости движения на упомянутом участке пути, данные о наличии поворотов на упомянутом участке пути, данные о погодных условиях на упомянутом участке пути, данные инфраструктуры упомянутого участка пути, данные о транспортном средстве, находящемся на упомянутом другом участке пути, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства.
14. Носитель по п. 13, характеризующийся тем, что в случае, когда упомянутыми данными о точке обязательной децелерации являются данные о точке обязательной децелерации на участке пути, с которым пересекается другой участок пути, и при этом упомянутые данные инфраструктуры упомянутого участка пути включают данные средства регулирования дорожного движения, сигнализирующие о допустимости движения без остановки путем пересечения упомянутого другого участка пути в момент времени, когда упомянутое первое транспортное средство достигнет упомянутой точки обязательной децелерации, обеспечивают формирование расчетного трека упомянутого первого транспортного средства, причем такое формирование включает расчет времени, требуемого для пересечения упомянутым первым транспортным средством упомянутого другого участка пути при движении упомянутого первого транспортного средства от упомянутой точки обязательной децелерации до точки завершения пересечения упомянутого другого участка пути, причем такая точка завершения пересечения упомянутого другого участка пути не расположена на упомянутом другом участке пути и расположена по направлению движения упомянутого первого транспортного средства по траектории, пересекающей упомянутый другой участок пути, при этом по результатам упомянутого расчета времени обеспечивают формирование расчетного скоростного профиля упомянутого первого транспортного средства для упомянутого расчетного трека упомянутого первого транспортного средства, причем формируемый расчетный скоростной профиль включает, по меньшей мере, одно из: движение через упомянутую точку обязательной децелерации без изменения скорости движения упомянутого первого транспортного средства, движение через упомянутую точку обязательной децелерации с уменьшением скорости движения упомянутого первого транспортного средства до полной остановки в точке обязательной остановки, причем упомянутая точка обязательной остановки расположена по направлению движения упомянутого первого транспортного средства по траектории, не достигающей упомянутого другого участка пути, движение через упомянутую точку обязательной децелерации с увеличением скорости движения упомянутого первого транспортного средства таким образом, чтобы обеспечить пересечение первым транспортным средством упомянутого другого участка пути за время, соответствующее времени, полученному при упомянутом расчете времени, требуемого для упомянутого пересечения упомянутым первым транспортным средством упомянутого другого участка пути.
15. Носитель по п. 14, характеризующийся тем, что при упомянутом формировании расчетного трека упомянутого первого транспортного средства учитывают одно из или комбинацию из: данные о транспортном средстве, находящемся на упомянутом другом участке пути, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства.
16. Носитель по п. 13, характеризующийся тем, что в случае, когда упомянутыми данными о точке обязательной децелерации являются данные о точке обязательной децелерации на участке пути, с которым пересекается другой участок пути, и при этом упомянутые данные инфраструктуры упомянутого участка пути включают данные средства регулирования дорожного движения, сигнализирующие о недопустимости движения без остановки путем пересечения упомянутого другого участка пути в момент времени, когда упомянутое первое транспортное средство достигнет упомянутой точки обязательной децелерации, обеспечивают формирование расчетного трека упомянутого первого транспортного средства, причем такое формирование включает получение данных о времени, когда данные упомянутого средства регулирования дорожного движения будут сигнализировать о допустимости движения без остановки путем пересечения упомянутого другого участка пути, и на основании упомянутых полученных данных времени обеспечивают изменение точки обязательной децелерации таким образом, чтобы было обеспечено движение упомянутого первого транспортного средства по траектории, пересекающей упомянутый другой участок пути, без остановки упомянутого первого транспортного средства в момент времени, когда данные упомянутого средства регулирования дорожного движения сигнализируют о допустимости движения без остановки путем пересечения упомянутого другого участка пути.
17. Носитель по п. 16, характеризующийся тем, что упомянутые данные, ассоциированные с участком пути, по меньшей мере, включают данные о нескольких точках обязательной децелерации, при этом упомянутые данные о точках обязательной децелерации представляют собой данные о точках обязательной децелерации на упомянутом участке пути, расположенные соответственно перед несколькими другими участками пути, с которыми пересекается упомянутый участок пути, при этом с каждым соответствующим упомянутым другим участком пути ассоциированы соответствующие упомянутые данные средства регулирования дорожного движения, при этом действия упомянутого способа по п. 6 выполняются для каждой из упомянутых точек обязательной децелерации таким образом, чтобы было обеспечено движение упомянутого первого транспортного средства по соответствующим траекториям, пересекающим соответствующие упомянутые другие участки пути, без остановки упомянутого транспортного средства в момент времени, когда соответствующие упомянутые данные упомянутых средств регулирования дорожного движения сигнализируют о допустимости движения без остановки путем пересечения соответствующего упомянутого другого участка пути.
18. Носитель по п. 13, характеризующийся тем, что в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, данные о транспортном средстве, находящемся на упомянутом другом участке пути, обеспечивают получение трека упомянутого транспортного средства, находящегося на упомянутом другом участке пути, причем упомянутый трек такого транспортного средства включает, по меньшей мере, данные, ассоциированные с участком пути, по которому движется такое транспортное средство, при этом такие ассоциированные с участком пути данные включают данные о траектории движения такого транспортного средства, находящегося на упомянутом другом участке пути, при этом данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные о траектории движения первого транспортного средства, при этом в случае, когда упомянутые данные траекторий движения включают данные о точке пересечения траектории движения первого транспортного средства с траекторией движения упомянутого транспортного средства, находящегося на упомянутом другом участке пути, обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы исключить одновременное нахождение первого транспортного средства и упомянутого транспортного средства, находящегося на упомянутом другом участке пути, в упомянутой точке пересечения траекторий движения, и при этом обеспечить движение упомянутого первого транспортного средства по упомянутой траектории движения упомянутого первого транспортного средства без остановки.
19. Носитель по п. 13, характеризующийся тем, что в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, данные о транспортном средстве, находящемся на упомянутом участке пути в точке обязательной децелерации или рядом с ней, обеспечивают получение трека такого транспортного средства и обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы было обеспечено формирование расчетного трека упомянутого первого транспортного средства, соответствующего упомянутому треку транспортного средства, находящегося на упомянутом участке пути в точке обязательной децелерации или рядом с ней, при движении упомянутого первого транспортного средства по упомянутому участку пути со скоростью движения, меньшей, чем скорость движения упомянутого транспортного средства, находящегося на упомянутом участке пути в точке обязательной децелерации или рядом с ней.
20. Носитель по п. 13, характеризующийся тем, что упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают, по меньшей мере, одно из или комбинацию из: данные прогноза нахождения на упомянутом другом участке пути транспортного средства, данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства; при этом в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные прогноза нахождения на упомянутом другом участке пути транспортного средства, обеспечивают получение прогноза трека упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, причем упомянутый прогноз трека такого транспортного средства включает, по меньшей мере, данные, ассоциированные с участком пути, по которому может двигаться такое транспортное средство, при этом такие ассоциированные с участком пути данные включают данные о прогнозе траектории движения такого транспортного средства, которое может находиться на упомянутом другом участке пути, при этом данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные о траектории движения первого транспортного средства, при этом в случае, когда упомянутые данные траектории движения первого транспортного средства и данные о прогнозе траектории движения транспортного средства, которое может находиться на упомянутом другом участке пути, включают данные о точке пересечения траектории движения первого транспортного средства с прогнозируемой траекторией движения упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы исключить одновременное нахождение первого транспортного средства и упомянутого транспортного средства, которое может находиться на упомянутом другом участке пути, в упомянутой точке пересечения упомянутой траектории движения первого транспортного средства и упомянутой прогнозируемой траектории движения транспортного средства, которое может находиться на упомянутом другом участке пути, и при этом обеспечить движение упомянутого первого транспортного средства по упомянутой траектории движения упомянутого первого транспортного средства без остановки; при этом, когда в случае, когда упомянутые данные, ассоциированные с участком пути, который будет пройден первым транспортным средством, дополнительно включают данные прогноза нахождения на упомянутом участке пути в точке обязательной децелерации или рядом с ней транспортного средства, обеспечивают получение прогноза трека такого транспортного средства и обеспечивают изменение упомянутой точки обязательной децелерации таким образом, чтобы было обеспечено формирование расчетного трека упомянутого первого транспортного средства, соответствующего упомянутому прогнозу трека транспортного средства, которое может находиться на упомянутом участке пути, который будет пройден первым транспортным средством, в точке обязательной децелерации или рядом с ней, при движении упомянутого первого транспортного средства по упомянутому участку пути со скоростью движения, меньшей, чем скорость движения упомянутого транспортного средства, которое может находиться на упомянутом участке пути, который будет пройден первым транспортным средством, в точке обязательной децелерации или рядом с ней.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 10061637 B1, 28.08.2018 | |||
| СПОСОБЫ, УСТРОЙСТВА И КАРТОГРАФИЧЕСКИЕ БАЗЫ ДАННЫХ ДЛЯ ПРОКЛАДКИ "ЗЕЛЕНОГО" МАРШРУТА | 2008 |
|
RU2523192C2 |

