СВЯЗАННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет и преимущество предварительной заявки США № 62/755,803, поданной 5 ноября 2018 г., озаглавленной «Auto Hydraulic Treating Pressure Management», содержание которой полностью включено в настоящий документ посредством ссылки, и испрашивает приоритет и преимущество предварительной заявки США № 62/832,102, поданной 10 апреля 2019 г., озаглавленной «Fracturing Pumping Automation by Condition Based Operation», содержание которой полностью включено в настоящий документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] Настоящее изобретение в целом относится к автоматизированному разрыву пласта с автоматическим управлением скоростью нагнетания насоса.
[0003] Для обеспечения надлежащего разрыва пласта в ходе работы по гидроразрыву пласта используется управление давлением. Способ управления давлением - это соответствующая регулировка скорости нагнетания насоса для поддержания безопасного диапазона давления обработки. В настоящее время этот процесс сложен и требует от оператора насоса тесного сотрудничества с представителем клиента для контроля давления обработки на устье скважины и ручной регулировки скорости нагнетания насоса, если это необходимо, для поддержания давления обработки в безопасном диапазоне. Однако оператору насоса часто трудно управлять давлением обработки (особенно на начальном этапе работы по разрыву пласта), чтобы поддерживать давление обработки в безопасном диапазоне. Следовательно, система, которая может автоматически и точно управлять давлением обработки, может быть полезной в различных типах скважин.
[0004] В различных сценариях, в зависимости от различных условий, ствол скважины может быть пробурен, по меньшей мере частично, с использованием наклонно-направленного бурения. Под наклонно-направленным бурением обычно понимается отклонение от вертикали, например, отклонение ствола скважины от вертикали более чем на 80 градусов. Наклонно-направленное бурение можно использовать для формирования ствола скважины, содержащего по меньшей мере одну боковую часть, которая, таким образом, может характеризовать ствол скважины или скважину как горизонтальную скважину. Горизонтальная скважина может быть направлена таким образом для проникновения в пласт-коллектор на большую длину, в частности в обширный горизонтально расположенный пласт-коллектор, где она может обеспечивать больший контакт с пластом-коллектором по сравнению с вертикальной скважиной.
[0005] Гидроразрыв пласта может использоваться в различных типах скважин, которые могут включать одну или более вертикальных частей, одну или более боковых частей и т.д. Горизонтальная скважина с несколькими стадиями разрыва пласта, каждая из которых содержит множество перфорационных кластеров для инициирования множества разрывов, стала одним из наиболее распространенных вариантов заканчивания скважин при разработке нетрадиционных нефтяных и газовых ресурсов (например, нетрадиционных пластов-коллекторов). Однако внутрискважинные диагностические измерения с использованием оптоволоконной технологии или эксплуатационного каротажа часто показывают, что не каждый перфорационный кластер подвергается эффективной стимуляции, что может негативно повлиять на производительность скважины. Существует несколько возможных механизмов, которые могут привести к неравномерной стимуляции в нескольких перфорациях, включая латеральную неоднородность свойств пласта-коллектора, особенно напряжение на месте проведения работ, плохую структуру перфорации с ограниченным входом, не обеспечивающую достаточное трение при отклоняющейся перфорации для преодоления разницы напряжений, эрозию перфорации проппантом, который снижает трение перфорации и механическое взаимодействие между соседними трещинами (например, так называемый эффект ослабления напряжения).
[0006] Эффективный и проверенный способ повышения эффективности заканчивания (например, охвата стимуляции среди нескольких кластеров) включает использование стратегии «инженерного заканчивания» для выбора и оптимизации мест перфорации таким образом, чтобы они располагались в породах со сходными свойствами, чтобы избежать несоответствий, которые могут способствовать неравномерной стимуляции. Однако эффективность такого подхода зависит от каротажных диаграмм для определения соответствующих свойств породы пласта-коллектора, в особенности акустических каротажных диаграмм для оценки напряжения на месте проведения работ, которые влекут за собой значительные дополнительные затраты и, следовательно, не часто проводятся. Доступный гамма-каротаж, который можно использовать при направлении скважины во время бурения, может оказаться недостаточным для предоставления качественной информации, необходимой для достижения надежного инженерно-технического заканчивания.
[0007] Другой способ, который помогает инженерам по разрыву пласта в ходе операций разрыва пласта в обычных скважинах, - это диагностика давления. Для определения скорости разрыва пласта и давления, напряжения смыкания, свойств поглощения пластом жидкости разрыва, трения перфорации и извилистости вблизи ствола скважины использовались различные испытания нагнетания и методы анализа соответствующих характеристик давления. Однако использование большинства способов в нетрадиционных пластах-коллекторах сильно ограничено из-за чрезвычайно низкой проницаемости породы, что может потребовать очень длительного времени остановки скважины, чтобы увидеть закрытие трещины, а это делает большинство таких способов непригодными для использования на практике. Кроме того, одним из факторов, позволяющих эффективно разрабатывать нетрадиционные пласты-коллекторы, является эффективность эксплуатации. Операторы могут стремиться минимизировать время простоя во время разрыва пласта и между стадиями, чтобы снизить затраты и, следовательно, сэкономить время, поскольку эти испытания нагнетания обычно не интегрируются в рутинные операции, как в случае обычных пластов-коллекторов.
[0008] Различные недостатки в операциях разрыва пласта можно преодолеть, используя различные примеры автоматизированных систем и схем управления и/или инструкций, описанных в данном документе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] Система может содержать один или более процессоров; запоминающее устройство, доступное по меньшей мере одному из одного или более процессоров; интерфейс данных, принимающий данные, полученные одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса; интерфейс управления, передающий сигналы управления по меньшей мере одному из одного или более насосов; компонент моделирования, функционально связанный по меньшей мере с одним из одного или более процессоров, который прогнозирует давление в скважине с использованием модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, при этом скважина соединена по текучей среде по меньшей мере с одним из одного или более насосов; и компонент регулировки скорости нагнетания насоса, функционально связанный по меньшей мере с одним из одного или более процессоров, который в режиме прогнозирования давления генерирует, используя прогнозируемое давление компонента моделирования и пороговое значение давления, сигнал управления скоростью нагнетания насоса для передачи через интерфейс управления. Способ может включать прием данных, полученных одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса; прогнозирование давления в скважине с использованием модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, причем скважина соединена по текучей среде с одним или более насосов; генерирование в режиме прогнозируемого давления сигнала управления скоростью нагнетания насоса с использованием прогнозируемого давления и порогового значения давления; и передачу сигнала управления скоростью нагнетания насоса через интерфейс управления для управления работой по меньшей мере одного из одного или более насосов. Система может содержать один или более процессоров; запоминающее устройство, доступное по меньшей мере одному из одного или более процессоров; интерфейс данных, получающий в реальном времени данные для отдельных насосов в парке насосов в ходе операции гидроразрыва пласта; интерфейс управления, передающий сигналы управления для управления каждым из отдельных насосов в парке насосов в ходе операции гидроразрыва пласта; компонент производительности, функционально связанный по меньшей мере с одним из одного или более процессоров, который оценивает в реальном времени производительность каждого из отдельных насосов в парке насосов, используя по меньшей мере часть данных в реальном времени, если расчетная производительность насосов в режиме реального времени для парка насосов, рассчитанная с использованием оценок, меньше максимальной заданной производительности насосов для парка насосов из-за ухудшения работы по меньшей мере одного из отдельных насосов; и компонент управления, функционально связанный по меньшей мере с одним из одного или более процессоров, который для целевого значения скорости нагнетания насосов парка насосов в ходе операции гидроразрыва пласта генерирует по меньшей мере одну из настроек дроссельной заслонки двигателя и коробки передач для каждого из отдельных насосов, используя расчетную производительность в реальном времени для каждого из отдельных насосов, причем настройки могут передаваться через интерфейс управления в виде одного или более сигналов управления. Способ может включать получение данных в реальном времени для отдельных насосов в парке насосов в ходе операции гидроразрыва пласта; оценку в реальном времени производительности каждого из отдельных насосов в парке насосов, используя по меньшей мере часть данных в реальном времени, если расчетная производительность насосов в режиме реального времени для парка насосов, рассчитанная с использованием оценок, меньше максимальной заданной производительности насосов для парка насосов из-за ухудшения работы по меньшей мере одного из отдельных насосов; генерирования для целевого значения скорости нагнетания насосов парка насосов в ходе операции гидроразрыва пласта по меньшей мере одной из настроек дроссельной заслонки двигателя и коробки передач для каждого из отдельных насосов, используя расчетную производительность в реальном времени для каждого из отдельных насосов; и передачу настроек через интерфейс управления в виде одного или более сигналов управления, которые управляют каждым из отдельных насосов в парке насосов в ходе операции гидроразрыва пласта. Также раскрыты различные другие устройства, системы, способы и т.д.
[0010] В этом описании сущности изобретения приведены понятия, которые дополнительно описаны ниже в подробном описании. Данная сущность изобретения не предназначена для определения ключевых или существенных отличительных признаков заявленного объекта изобретения, а также не предназначена для использования с целью ограничения объема заявленного объекта изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Признаки и преимущества описанных вариантов осуществления изобретения станут более понятны при изучении дальнейшего описания в сочетании с прилагаемыми графическими материалами.
[0012] Фиг. 1 иллюстрирует пример системы;
[0013] Фиг. 2 иллюстрирует пример системы;
[0014] Фиг. 3 иллюстрирует примеры компонентов и пример способа;
[0015] Фиг. 4 иллюстрирует примеры компонентов и пример способа;
[0016] Фиг. 5 иллюстрирует примеры операций и данных по разрыву пласта;
[0017] Фиг. 6 иллюстрирует пример модели предполагаемых эксплуатационных характеристик;
[0018] Фиг. 7 иллюстрирует примеры графиков операций и пример результатов моделирования операции разрыва пласта;
[0019] Фиг. 8 иллюстрирует пример результатов моделирования операции разрыва пласта;
[0020] Фиг. 9 иллюстрирует пример способа;
[0021] Фиг. 10 иллюстрирует пример графического представления динамических данных давления и потока;
[0022] Фиг. 11 иллюстрирует пример анализа данных давления для определения физических явлений;
[0023] Фиг. 12 иллюстрирует примеры графиков данных для оценки потери давления на трение;
[0024] Фиг. 13 иллюстрирует примеры графиков способа;
[0025] Фиг. 14 иллюстрирует примеры графиков способа проведения теста ступенчатого расхода и хода операции гидроразрыва пласта;
[0026] Фиг. 15 иллюстрирует пример системы;
[0027] Фиг. 16 иллюстрирует пример системы;
[0028] Фиг. 17 иллюстрирует пример системы;
[0029] Фиг. 18 иллюстрирует пример системы;
[0030] Фиг. 19 иллюстрирует пример системы;
[0031] Фиг. 20 иллюстрирует пример способа;
[0032] Фиг. 21 иллюстрирует пример способа;
[0033] Фиг. 22 иллюстрирует пример способа;
[0034] Фиг. 23 иллюстрирует пример системы;
[0035] Фиг. 24 иллюстрирует пример способа;
[0036] Фиг. 25 иллюстрирует пример способа;
[0037] Фиг. 26 иллюстрирует пример способа;
[0038] Фиг. 27 иллюстрирует пример способа;
[0039] Фиг. 28 иллюстрирует пример системы и примеры способов; и
[0040] Фиг. 29 иллюстрирует примеры компонентов системы и сетевой системы.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЕНИЯ ИЗОБРЕТЕНИЯ
[0041] Данное описание не следует воспринимать в ограничительном смысле, а скорее как для описания общих принципов реализаций. Объем описанных реализаций должен определяться со ссылкой на формулу изобретения.
[0042] В одном или более вариантов осуществления изобретения система управления может управлять давлением автоматически, регулируя скорость нагнетания насоса на основе расчетного давления на устье скважины, скорости изменения давления и прогнозируемой тенденции давления при данной скорости нагнетания насоса.
[0043] Оценка давления на устье скважины может быть получена путем измерения одним или более преобразователей давления на устье скважины, одним или более преобразователей нагнетания насоса, одним или более других датчиков или их комбинаций. Если в системе имеется один или более насосов, данные измерения давления от подключенных насосов могут быть усреднены. В одном или более вариантов осуществления система управления может быть выполнена с возможностью фильтрации измерений давления для удаления аномальных значений, а отфильтрованные измерения давления могут быть усреднены для получения расчетного давления на устье скважины.
[0044] Скорость изменения давления может быть получена из расчетного давления на устье скважины и хронологических данных измерения давления.
[0045] Давление на устье скважины Pw представляет собой комбинацию следующих трех компонентов:
Pb: Забойное давление (или Pbh);
Ph: Гидростатическое давление жидкости в стволе скважины; и
Pf: Потери давления на трение, вызванное потоком жидкости
Pw=Pb - Ph+Pf
[0046] Определенное выше Pb зависит от свойств пласта и пластовой жидкости, которые можно оценить на основе проекта работы по разрыву пласта; Ph может быть получено из свойств суспензии для разрыва пласта и геометрии ствола скважины; и Pf является функцией скорости нагнетания насоса и свойства гидродинамического трения.
[0047] Система управления может иметь или взаимодействовать с алгоритмами машинного обучения. Например, один или более алгоритмов машинного обучения могут применяться для обновления моделей, используемых для оценки Pb и Pf. С использованием обновленной(ых) модели(ей) будущее давление прогнозируется на основе расчетного давления на устье скважины, скорости изменения давления, скорости нагнетания насоса и требуемой скорости нагнетания насоса. В одном или более вариантов осуществления изобретения в алгоритме прогнозирования может использоваться полиномиальная регрессия 1-го и/или 2-го порядка. Например, модель может быть гибридной моделью (например, основанная на физических принципах модель, поддерживаемая данными).
[0048] Например, Pf можно выразить как функцию потока: Pf=K*Q2, где коэффициент K зависит от свойств жидкости и геометрии ствола скважины. Хотя информация о типе жидкости и геометрии ствола скважины может быть недоступна для непосредственного получения K, измерение данных в реальном времени может использоваться для оценки значения K.
[0049] Например, система управления может быть связана с кривой зависимости давления обработки от скорости нагнетания насоса или содержать ее. Кривая зависимости давления обработки от скорости нагнетания насоса может иметь значение по умолчанию, выбранное из зарегистрированных данных прошлой работы в аналогичной области, при условии, что скважина ведет себя аналогичным образом. Например, кривые зависимости давления обработки от скорости нагнетания насоса для скважин в той же или аналогичной области могут быть представлены в виде вероятностной модели, в которой по третьей оси откладывается вероятность каждой пары давления и дебита, соответствующей двум другим осям. В одном или более вариантов осуществления изобретения кривая зависимости давления обработки от скорости нагнетания насоса может храниться на сервере или серверах и обновляться по мере выполнения новых работ по разрыву пласта. В одном или более вариантов осуществления изобретения кривая зависимости давления обработки от скорости нагнетания насоса может храниться в системе управления и обновляться по мере выполнения текущей работы или обновляться на основе данных, отправленных в систему управления с удаленных устройств.
[0050] Например, система управления может быть выполнена с возможностью использования кривой зависимости давления обработки от скорости нагнетания насоса, расчетного давления на устье скважины, скорости нагнетания насоса, скорости изменения давления или их комбинаций для прогнозирования того, приближается ли давление к заданному пороговому значению давления или превышает его при текущей скорости нагнетания насоса, и автоматического уменьшения скорости нагнетания насоса таким образом, чтобы поддерживать давление на уровне ниже порогового.
[0051] В одном или более вариантов осуществления изобретения система управления может получать вводимые пользователем данные, устанавливающие более высокую установку скорости нагнетания насоса, поскольку данная система управления может спрогнозировать, будет ли достигнуто или превышено пороговое значение давления при новой установке скорости нагнетания насоса. Если определено, что пороговое значение давления будет достигнуто или превышено, система управления может быть выполнена с возможностью автоматической регулировки крутизны линейного изменения, уменьшения новой установки скорости или их комбинации для поддержания давления ниже порогового значения давления. В одном или более вариантов осуществления изобретения система управления может использовать кривую зависимости давления обработки от скорости нагнетания насоса для оптимизации отрегулированной установки давления; тем самым идентифицируя скорость, которая максимально приближена к новой установке скорости при поддержании давления ниже порогового значения давления.
[0052] В одном или более вариантов осуществления изобретения система управления может быть выполнена с возможностью функционирования согласно приведенному выше описанию или переключения на другой способ управления скоростью нагнетания насоса. Например, система управления может получить вводимые пользователем данные для использования режима управления давлением. Например, система управления может установить скорость нагнетания насоса на максимальную скорость, обеспечиваемую доступной мощностью подключенных насосов, и поддерживать эту скорость, пока давление находится в соответствующих пределах. Если на объекте обеспечиваются достаточные мощности, этот режим работы может привести к постоянному давлению на устье скважины во время стимуляции, что может сократить время работы насосы и повысить эффективность работы. Однако если давление начинает приближаться к пороговому значению или превышать его, скорость нагнетания насоса может быть уменьшена. Режим, который отличается от режима управления давлением, может называться альтернативным режимом.
[0053] Например, можно использовать систему управления для автоматического инициирования гидроразрыва. Автоматическое инициирование гидроразрыва помогает сильнее и быстрее воздействовать на кластеры гидроразрыва на основе максимально допустимого давления (например, вместо использования предварительно определенной скорости) без отключения насосов, что может обеспечить лучший охват кластера инициируемым гидроразрывом.
[0054] Например, система управления может также содействовать автоматическому мониторингу кластеров и повторным инициированиям. Например, система управления может быть связана с одним или более облачных приложений, пограничных приложений и т.п. или их комбинациями, которые определяют охват кластера гидроразрыва в режиме реального времени (см., например, кластеры гидроразрыва на Фиг. 7 и 8). Например, рассмотрим инструмент планирования в реальном времени, который использует оценку охвата кластера гидроразрыва в реальном времени. Например, система управления может использовать обратную связь в сочетании с прогнозируемым давлением и скоростью нагнетания насоса, расчетным давлением на устье скважины, скоростью изменения давления, требуемой скоростью и моделями, как описано выше, для регулировки скорости/давления с целью достижения лучшего охвата кластера.
[0055] Например, система управления может также быть выполнена с возможностью активации последовательности отключения при выпадении расклинивающего агента из жидкости для гидроразрыва. Например, система управления может быть выполнена с возможностью управления давлением таким образом, чтобы работа могла выполняться с промывкой при максимально возможной скорости, основанной на максимально допустимом давлении. Такой подход может обеспечить лучшую промывку и большую вероятность устранения условий выпадения расклинивающего агента из жидкости для гидроразрыва; тем самым уменьшая вероятность нежелательного взаимодействия с катушкой.
[0056] Например, система управления может также обеспечивать более быстрое выполнение гидроразрыва за счет максимального увеличения скорости ближе к концу работы и на протяжении всей операции промывки на основе максимально допустимого давления.
[0057] Например, система управления может также обеспечивать распределение мощности для обеспечения распределения мощности между первичными приводами для более эффективной оптимизации мощности между доступными насосными установками.
[0058] Фиг. 1 иллюстрирует пример системы 100, которая может использоваться для выполнения операции гидроразрыва пласта, которая может также называться работой. Система 100 может содержать насосную систему 110 для перекачивания жидкости с поверхности 112 скважины 114 в ствол 116 скважины во время выполнения операций на нефтепромысле. В проиллюстрированном варианте осуществления изобретения система 100 используется для операции гидроразрыва пласта, и закачиваемая жидкость представляет собой жидкость для разрыва пласта. Например, жидкость может быть суспензией, содержащей проппант (или расклинивающий агент). В проиллюстрированном варианте осуществления изобретения система 100 содержит множество резервуаров 118 для воды, из которых вода подается в гелеобразователь 120. Гелеобразователь 120 объединяет воду из резервуаров 118 для воды с гелеобразователем с получением геля. Затем гель направляют в смеситель 122, в котором он смешивается с проппантом из устройства 124 подачи проппанта с образованием жидкости для гидроразрыва. Компьютеризированная система 125 управления может использоваться для управления по меньшей мере частью системы 100 во время по меньшей мере части операции разрыва пласта.
[0059] Жидкость для разрыва пласта перекачивается при низком давлении (например, в диапазоне от около 50 фунтов на квадратный дюйм (345 кПа) до около 200 фунтов на квадратный дюйм (1379 кПа) или более) из смесителя 122 в насосную систему 110 через один или более трубопроводов, как изображено сплошной линией 128. Насосная система 110 может содержать общую коллекторную систему 126, которая может также называться в данном случае снарядом.
[0060] На Фиг. 1 схематично изображена коллекторная система 126 в виде увеличенного прямоугольника, имеющего входящие и исходящие стрелки, изображающие различные сегменты пути потока. В проиллюстрированном варианте осуществления изобретения коллекторная система 126 содержит коллектор 138 низкого давления и коллектор 140 высокого давления. Коллектор 138 низкого давления коллекторной системы 126 может распределять суспензию под низким давлением ко множеству насосов 130-1, 130-2, 130-3, 130-4, 130-5, 130-6, 130-7, 130-8, 130-9 и 130-N, как показано сплошными линиями 132. Насосы с 130-1 по 130-N также могут называться насосами для разрыва пласта и могут, например, быть плунжерными насосами. В проиллюстрированном варианте осуществления изобретения каждый из насосов для разрыва пласта с 130-1 по 130-N может получать жидкость для разрыва пласта при низком давлении и нагнетать ее в часть коллектора 140 высокого давления коллекторной системы 126 при высоком давлении, как показано пунктирной линией 134 (например, в различных вариантах осуществления изобретения высокое давление может находиться в диапазоне от около 3000 фунтов на квадратный дюйм (20,7 МПа) до около 15000 фунтов на квадратный дюйм (103 МПа)). Коллектор 140 высокого давления затем направляет жидкость для разрыва пласта от насосов с 130-1 по 130-N в ствол 116 скважины, как показано сплошной линией 136. Другими словами, выход коллектора 140 высокого давления может сообщаться по текучей среде со стволом 116 скважины и может быть выполнен с возможностью доставки жидкости вниз по стволу скважины.
[0061] Коллекторная система 126 может содержать множество клапанов, которые могут быть подключены к насосам для разрыва пласта с 130-1 по 130-N, как дополнительно описано ниже. Система 125 управления может использоваться для автоматизации работы клапанов, как также описано ниже. Например, система 125 управления может быть выполнена с возможностью выполнения машиночитаемого кода для управления движением клапанов. В некоторых вариантах система 125 управления может автоматически создавать пары клапанов и насосов с 130-1 по 130-N. Например, система 125 управления может создавать определение пути потока, которое представляет различные пути потока между отдельными частями коллекторной системы 126. На основе определения пути потока система 125 управления может создавать механизмы взаимодействия между насосами с 130-1 по 130-N и коллекторной системой 126.
[0062] В некоторых вариантах осуществления изобретения насосы для разрыва пласта с 130-1 по 130-N могут быть независимыми блоками, подсоединенными к коллекторной системе 126 на площадке. В некоторых схемах после завершения работы насосы для разрыва пласта с 130-1 по 130-N могут быть отсоединены от коллекторной системы 126, перевезены на другой участок и подключены к коллекторной системе на новом участке. Конкретный один или более насосов для разрыва пласта с 130-1 по 130-N могут быть по-разному подсоединены к одной и той же коллекторной системе 126 или к разным коллекторным системам при выполнении разных работ. В некоторых вариантах осуществления каждый из насосов для разрыва пласта с 130-1 по 130-N может содержать насосный агрегат, установленный на грузовом автомобиле или прицепе для облегчения транспортировки. Возможны и другие варианты. Например, один или более насосов с 130-1 по 130-N могут быть установлены на салазках или любой другой подходящей раме или платформе, которые могут использоваться для выполнения более длительных операций.
[0063] В некоторых вариантах осуществления изобретения насос (например, один или более насосов с 130-1 по 130-N) может содержать первичный привод, который приводит в движение коленчатый вал через коробку передач и приводной вал. Коленчатый вал, в свою очередь, может приводить в движение один или более плунжеров в направлении к камере на конце жидкости насоса и от нее для создания колебаний высокого и низкого давления в камере. Эти колебания давления могут позволить насосу получать жидкость под низким давлением и нагнетать ее под высоким давлением, например, через обратные клапаны. В некоторых вариантах осуществления изобретения конец жидкости насоса может содержать впускное отверстие (например, впускную трубу) для приема жидкости под низким давлением из коллекторной системы 126 и выпускное отверстие (например, выпускную трубу) для выпуска жидкости под высоким давлением в коллекторную систему 126.
[0064] Фиг. 2 схематично иллюстрирует пример системы 200, которая может использоваться для автоматического регулирования давления.
[0065] Насосная площадка может включать несколько включенных насосов 205 (см., например, насосы с 130-1 по 130-N на Фиг. 1). В примере на Фиг. 2 насосы 205 могут содержать один или более интерфейсов 204, спецификаций 206, данных 207 о работоспособности, блоков управления двигателем (ECU, от англ. engine control unit) 208 (например, и другие блоки управления) и датчиков 209. Система 200 может содержать различные датчики (например, преобразователи и т.д.), например, различные типы датчиков, которые могут измерять одно или более физических явлений, таких как скорость потока, давление и т.д. Например, можно рассматривать различные датчики, которые могут измерять скорость потока и/или давление для одного или более насосов 205. Например, возможно наличие одного или более преобразователей 210-1 и 210-N давления нагнетания насоса, одного или более преобразователей 214 давления на устье скважины, одного или более датчиков 216 скорости нагнетания насоса или их комбинаций.
[0066] Что касается сбора данных, скорости могут быть определены для одного или более каналов в зависимости от оборудования, реализуемых способов и т.д. Например, сбор данных через один или более интерфейсов данных может иметь различные частоты, которые могут определять диапазон частот от низких до высоких. Например, частота может составлять 200 Гц или более (например, для высокочастотных данных о давлении, получаемых для одного или более определений трения и т.д.). Например, для сбора и анализа высокочастотных импульсных данных давления может использоваться такое оборудование, как оборудование WELLWATCHER STIM (Schlumberger Limited, Хьюстон, Техас). В качестве сервиса мониторинга оборудование WELLWATCHER STIM может помочь идентифицировать точки входа жидкости для разрыва пласта и изменения давления, которые могут указывать на нарушения изоляции или инцидент гидроразрыва, позволяя быстро отреагировать на неожиданные проблемы стимуляции. Например, следует рассмотреть возможность мониторинга во время разрыва пласта для выявления инцидентов гидроразрыва на одной стадии и изменения характеристик последующих стадий, чтобы ограничить дальнейшее обводнение. Такой сервис может предусматривать проверку событий, таких как, например, спуск активирующего шара, заедание установки штекерами, смещение отверстия, поступление жидкости в пласт-коллектор и отведение жидкости.
[0067] Система 220 управления может быть функционально связана с насосами 205 для регулирования скорости нагнетания насосов 205. В примере на Фиг. 2 система 220 управления может содержать один или более процессоров 221, запоминающее устройство 223, доступное по меньшей мере одному из одного или более процессоров 221, инструкции 225 (например, один или более наборов команд, выполняемых процессором) и один или более интерфейсов 227 (например, последовательный, параллельный, проводной, беспроводной, оптический, силовой, информационный, командный и т.д.). Например, инструкции могут храниться на одном или более энергонезависимых машиночитаемых носителях данных (например, CRM), причем указанные инструкции могут упоминаться как выполняемые процессором или выполняемые компьютером. Такие инструкции могут быть выполняемыми таким образом, чтобы проинструктировать систему 220 управления выполнить одно или более действий.
[0068] Например, один или более блоков, проиллюстрированных в примере на Фиг. 2 могут представлять схему, которая может содержать инструкции. Например, блок может представлять CRM и/или один или более других типов схем.
[0069] Как показано, система 220 управления может содержать различные интерфейсы, такие как, например, интерфейсы 252, 253, 254, 255, 256, 257 и т.д. Например, один или более таких интерфейсов могут быть общим интерфейсом, таким как, например, сетевой интерфейс, который может быть проводным, беспроводным, оптическим и т.д. Например, интерфейс 252 может быть интерфейсом данных, функционально связанным с одним или более датчиков (например, преобразователями и т.д.), а интерфейс 254 может быть интерфейсом сигналов управления, например, для передачи одного или более сигналов управления по меньшей мере одному из одного или более насосов 205.
[0070] В примере согласно Фиг. 2 система 220 управления может содержать блок 222 фильтрации и/или очистки данных, который может принимать данные от одного или более датчиков, функционально связанных с одним или более насосов 205. Как показано, блок 222 фильтрации и/или очистки данных может принимать выходной сигнал от датчика 210-1 давления нагнетания насоса, датчика 210-N давления нагнетания насоса, датчика 214 давления на устье скважины и датчика 216 скорости нагнетания насоса.
[0071] Система 220 управления может принимать данные с одной или более скоростей, которые могут зависеть от рабочих параметров одного или более датчиков (например, аналого-цифровое преобразование, таймеры, другие схемы и т.д.).
[0072] Как показано, система 220 управления может содержать блок 224 оценки давления на устье скважины, блок 226 хронологических данных давления (например, данные давления для одного или более насосов 205 и т.д.), блок 228 требуемой скорости нагнетания насоса, блок 229 текущей скорости изменения давления, блок 230 моделей, блок 232 прогнозирования давления, блок 234 порогового давления и блок 236 регулировки скорости нагнетания насоса. Блок 224 оценки давления на устье скважины может оценивать давление на устье скважины для вывода в блок 229 текущей скорости изменения давления, который может также принимать данные, связанные с хронологическими значениями давления, от блока 226 хронологических данных давления.
[0073] Как показано, блок 236 регулировки скорости нагнетания насоса может принимать выходные данные блока 232 прогнозирования давления и блока 234 порогового давления, а также выходные данные блока 240 кривой зависимости давления обработки от скорости нагнетания насоса.
[0074] Снова обращаясь к блоку 230 моделей, как показано, различные блоки могут передавать данные в блок 230 моделей, который играет важную роль в обеспечении прогнозируемого давления блока 232 прогнозирования давления, который подает команды блоку 236 регулировки скорости нагнетания насоса. Что касается блока 230 моделей, он может принимать данные от датчика 216 скорости нагнетания насоса (например, необязательно через блок 222 фильтрации и/или очистки данных), может принимать данные из блока 224 оценки давления на устье скважины, может принимать данные от блока 228 требуемой скорости нагнетания насоса, может принимать данные от блока 229 текущей скорости изменения давления и может получать обратную связь через блок 246 модернизации модели, который обеспечивает одно или более обновлений для одной или более моделей блока 230 моделей.
[0075] Как показано, блок 246 модернизации модели является частью контура обратной связи, причем выходной сигнал блока 234 регулировки скорости нагнетания насоса обеспечивает обновление модели на основе точности одного или более предыдущих вычислений блока 244. В примере на Фиг. 2 блок 242 загрузки может использоваться для загрузки модели давления или моделей давления блока 230 моделей и результата выполнения, такого как, например, скорость нагнетания насоса блока 236 регулировки скорости нагнетания насоса (например, скорость нагнетания насоса, отрегулированная скорость нагнетания насоса и т.д.), в ресурс или ресурсы (см., например, блок 290 удаленных ресурсов). Как показано, блок 242 может предоставлять выходные данные в блок 244, при этом блок 242 может использовать один или более ресурсов (например, облачные ресурсы и т.д.) для одной или более моделей давления (например, используя ввод и результат выполнения), так что блок 244 может соответствующим образом обновлять одну или более моделей блока 230 моделей на основе точности предыдущего вычисления (или вычислений), так что блок 246 должным образом снабжен модернизациями для одной или более моделей блока 230 моделей. При таком подходе одна или более моделей блока 230 моделей могут быть обновлены по мере необходимости с использованием выходных данных блока 236 регулировки скорости нагнетания насоса и, например, ресурсов, которые могут быть удаленными относительно буровой площадки (например, удаленных вычислительных ресурсов и т.д.).
[0076] Что касается блока 230 моделей, он может, например, содержать модель, которая может быть моделью забойного давления (Pb), и модель, которая может представлять собой модель потери давления на трение, вызванной потоком жидкости (Pf). Такие модели могут, например, оценивать Pb (забойное давление) и Pf (потери давления на трение, вызванное потоком жидкости).
[0077] Система 220 управления может использовать прогнозируемое давление от блока 232, пороговое значение давления от блока 234 и кривую зависимости давления обработки от скорости нагнетания насоса от блока 240 для автоматического управления скоростью нагнетания насоса в блоке 236. Как показано, блок 236 регулировки скорости нагнетания насоса может подавать на выход соответствующий сигнал управления (например, команду и т.д.), чтобы побудить один или более насосов 205 выполнить регулировку скорости нагнетания насоса.
[0078] Система 220 управления может использоваться в контуре управления на площадке для управления скоростью нагнетания насоса и может использоваться в контуре частично за пределами площадки для обеспечения одного или более обновлений модели. Например, контур управления на площадке может работать, в то время как контур, расположенный частично за пределами площадки, может работать или нет. Например, система 220 управления может содержать инструкции, которые управляют использованием контура, частично расположенного за пределами площадки, например, в ответ на одно или более условий, которые могут возникать, обнаруживаться и т.д. на буровой площадке. Например, условие может возникать или обнаруживаться во время и/или после выполнения стадии разрыва пласта, так что система 220 управления вызывает одно или более обновлений модели с использованием контура, частично расположенного за пределами площадки, перед выполнением следующей стадии. В зависимости от скорости контура, частично расположенного за пределами площадки, обновление может быть доступно во время или после выполнения стадии разрыва пласта, что может определять, может ли обновление быть реализовано во время выполнения стадии разрыва пласта или нет.
[0079] Как пояснялось, система 220 управления может быть реализована таким образом, чтобы одна или более моделей блока 230 моделей были «вечнозелеными» (постоянно актуальными), например, по меньшей мере частично, за счет использования выходных данных системы 220 управления (например, блока 236 регулировки скорости нагнетания насоса). Как пояснялось, система 220 управления может «управлять» своими моделями в блоке 230 моделей таким образом, который основан на рабочих характеристиках системы 220 управления для работы или работ и/или на основе изменения одного или более условий (например, физическое состояние, условие выполнения работы и т.д.).
[0080] Что касается блока 224 оценки давления на устье скважины, блок 222 фильтрации и очистки данных может принимать измеренные значения давления и выполнять различные действия, например, для удаления аномальных значений из измеренных давлений. Блок 224 оценки давления на устье скважины может использовать выходной сигнал блока 222 фильтрации и очистки данных для определения оценки давления на устье скважины. Например, отфильтрованные и очищенные данные давления могут быть усреднены для получения оценки давления на устье скважины (например, оценки давления на устье скважины, Pw).
[0081] Как указано, оценка давления на устье скважины (Pw) может использоваться блоком 230 моделей для оценки Pb и Pf. Например, модели могут оценивать Pb и Pf с использованием уравнения Pw=Pb - Ph+Pf, где Pb, Ph и Pf определяются следующим образом:
Pb: Забойное давление;
Ph: Гидростатическое давление жидкости в стволе скважины; и
Pf: Потери давления на трение, вызванное потоком жидкости.
[0082] Как упоминалось ранее, оценка давления на устье скважины (Pw) может также быть передана в блок 229 текущей скорости изменения давления, который может также принимать данные, связанные с хронологическими данными измерений давления блока 226. Например, хронологические данные измерений давления блока 226 могут предоставлять хронологические данные об измерениях давления одного или более насосов 205 за предыдущий период времени, например, 1 секунду, 2 секунды, 1 минуту, 1 час, 24 часа и т.д. Блок 229 текущей скорости изменения давления может использовать предоставленную оценку давления на устье скважины (Pw) и предоставленные хронологические данные блока 226 для получения текущего значения скорости изменения давления. Например, если хронологические данные давления относятся к 10-минутному интервалу времени, могут быть выполнены инструкции, состоящие в вычитании оценки давления на устье скважины (Pw) из среднего значения хронологических данных давления и делении на 10 минут для получения текущей скорости изменения давления.
[0083] Например, могут быть выполнены инструкции для отправки вычисленной скорости изменения давления в блок 230 моделей, который оценивает Pb и Pf. Также могут выполняться инструкции для предоставления введенной требуемой скорости нагнетания насоса блока 228 в блок 230 моделей для оценки Pb и Pf. Модели, которые оценивают Pb и Pf, могут использовать оценку давления на устье скважины (Pw), требуемую скорость нагнетания насоса и текущую скорость изменения давления, чтобы обеспечить прогнозируемое давление блока 232. Например, модели, выполняющие оценку Pb и Pf, могут использовать полиномиальную регрессию 1-го и/или 2-го порядка для прогнозирования давления. Например, можно использовать один или более алгоритмов машинного обучения (ML) для обновления моделей, которые оценивают Pb и Pf (см., например, контур блоков 242, 244 и 246).
[0084] Могут выполняться инструкции для предоставления прогнозируемого давления блока 232, предварительно определенного порогового значения давления блока 236 и кривой зависимости давления обработки от скорости нагнетания насоса блока 240 в блок 236 регулировки скорости нагнетания насоса, который может содержать инструкции, выполняемые для регулировки скорости нагнетания одного или более насосов 205. Например, кривая зависимости давления обработки от скорости нагнетания насоса блока 240 может быть предоставлена системе 220 управления с центрального сервера. Кривая 240 зависимости давления обработки от скорости нагнетания насоса может быть обновлена с использованием данных от соседних операций и данных от операций на аналогичных пластах. Блок 236 регулировки скорости нагнетания насоса может определить, приближается ли прогнозируемое давление блока 232 к пороговому значению давления блока 234; при этом, если определено, что оно приближается к пороговому значению давления, блок 236 регулировки скорости нагнетания насоса может определить скорость нагнетания насоса по кривой 240 зависимости давления обработки от скорости нагнетания насоса, которая направлена на поддержание давления ниже порогового значения давления. Затем система 220 управления может управлять одним или более насосов 205 для достижения нового значения скорости нагнетания насоса (например, если определено, что требуется регулировка).
[0085] В одном или более вариантов осуществления изобретения система 220 управления, используя модуль 236 регулировки скорости нагнетания насоса, может получать вводимые пользователем данные для выполнения новой установки скорости (например, более высокой установки). В таком примере новая более высокая установка скорости может использоваться для прогнозирования давления, регулировки и оптимизации скорости, чтобы она была как можно ближе к новой более высокой установке скорости при поддержании давления ниже порогового давления. Например, это может достигаться путем регулировки крутизны линейного изменения скорости таким образом, чтобы оно замедлялось для оптимизации работы и поддержания давления ниже порогового значения давления. В другом примере блок 236 регулировки скорости нагнетания насоса может определить, что прогнозируемое давление блока 232, вычисленное с использованием новой установки скорости, будет превышать пороговое значение давления блока 234. По существу, блок 236 регулировки скорости нагнетания насоса может использовать кривую зависимости давления обработки от скорости нагнетания насоса блока 240, чтобы определить отрегулированную установку скорости, максимально близкую к требуемой новой установке скорости, которая при этом будет обеспечивать поддержание давления ниже порогового давления блока 234.
[0086] Как показано в примере на Фиг. 2, блок 242 может принимать входные данные от одной или более соседних скважин в виде данных блока 250 соседних скважин и/или может принимать входные данные от блока 260 давления закачки, который может быть связан с закачкой для одного или более типов оборудования, такого как, например, перфоратор, который может использоваться для перфорации обсадной колонны с целью гидравлического разрыва пласта, в котором расположена обсадная колонна.
[0087] Перфорация может создать туннель для сообщения по текучей среде в обсадной колонне или хвостовике с пластом-коллектором, посредством которого можно добывать нефть или газ. Например, для перфорации можно использовать струйный перфоратор, оснащенный кумулятивным зарядом взрывчатого вещества. Для перфорации могут использоваться различные типы оборудования (например, пулевое перфорирование, абразивно-струйное перфорирование или струйная обработка жидкостью под высоким давлением). Например, можно использовать систему перфораторов, такую как система перфораторов TEMPO (Schlumberger Limited, Хьюстон, Техас).
[0088] Как показано на Фиг. 2, система 200 может содержать одну или более вычислительных инфраструктур 270, которые могут включать, например, инфраструктуру механической модели земли (MEM, от англ. mechanical earth model), инфраструктуру моделирования гидроразрыва пласта (например, с рассмотрением характеристик и функций одной или более инфраструктур MANGROVE (Schlumberger Limited, Хьюстон, Техас), инфраструктур KINETIX (Schlumberger Limited, Хьюстон, Техас) и т.д.) и т.д. Например, система 220 управления может быть контроллером насоса, учитывающим особенности пласта-резервуара, выполненным с возможностью работы с использованием измеренных и/или вычисленных напряжений в пласте-резервуаре. В данном примере напряжения могут быть вычислены с использованием одной или более инфраструктур, которые могут включать связанные инфраструктуры, в которых, например, моделируемый гидроразрыв пласта и моделирование MEM связаны для получения обновленных значений напряжений (например, около скважины, в дальнем поле и т.д.), которые также могут предоставлять указатели разрыва пласта, необязательно представленные в виде дискретной модели сети трещин (DFN, от англ. discrete fracture network), которая может обеспечивать оценки проницаемости и/или одного или более других физических свойств пласта (например, пласта-коллектора и т.д.). Например, одна или более инфраструктур 270 могут содержать инфраструктуру моделирования пласта-коллектора, которая может использовать данные, результаты моделирования и т.д. для моделирования потока жидкости. Например, рассмотрим инфраструктуру ECLIPSE (Schlumberger Limited, Хьюстон, Техас) и/или инфраструктуру INTERSECT (Schlumberger Limited, Хьюстон, Техас), имеющую различные элементы и функции для моделирования потока жидкости в пласте-коллекторе (например, разрыв пласта после добычи, реагирование на добычу для увеличения нефтеотдачи и др.). Как было рассмотрено ранее, различные напряжения могут определять, как и где возникают трещины в ответ на одну или более процедур стимуляции (см., например, Фиг. 5).
[0089] Например, инфраструктура MEM и инфраструктура моделирования гидроразрыва пласта могут использоваться для определения давления инициирования разрыва для одной или более перфораций и, например, общего давления разрыва при заданной скорости нагнетания насоса в обсаженном и перфорированном заканчивании с несколькими перфорациями и/или перфорационным кластерами. Например, для определенных свойств пласта и напряжений на месте проведения работ MEM может определять ожидаемое давление разрыва и количество перфораций/кластеров, которые разрушаются, а также соответствующее трение перфорации.
[0090] Знания о разрыве пласта, включая мокрые и сухие типы трещин, могут улучшить знания о дальнейшем разрыве пласта и/или добыче ресурса из пласта-коллектора. Подход DFN может обеспечить знание взаимосвязанных сетей, по которым может течь жидкость, что может указывать на повышенную «проницаемость» пласта-коллектора, что может использоваться при моделировании пласта-коллектора для оценок фактической добычи (например, относительно времени и т.д.). Как объяснено ранее, оптимизация с учетом пласта-коллектора с использованием такой системы, как система 200 на Фиг. 2, может включать оптимизацию пласта-коллектора для добычи, например, путем оптимизации эффективности (например, с течением времени). Такая оптимизация может касаться бурения, заканчивания/осуществления гидроразрыва, а также минимизировать риск инцидентов при гидроразрыве, выпадения расклинивающего агента из жидкости для гидроразрыва и других потерь (потеря жидкости и т.д.).
[0091] Как показано, система 200 может использоваться для одной или более стадий гидроразрыва пласта. Например, рассмотрим многоэтапную работу по разрыву пласта, включающую две или более стадий.
[0092] В примере на Фиг. 2 показан блок 290 удаленных ресурсов, которые могут включать, например, облачные ресурсы (например, серверы, ядра, виртуальные машины, накопители, сетевое оборудование и т.д.). Как показано, различные элементы и функции системы 200 могут быть функционально связаны с облаком, храниться, реализовываться в нем и т.д. (например, сеть оборудования, содержащая вычислительное оборудование). Например, система 220 управления может содержать инструкции, выполняемые для вызова одного или более из следующего: обеспечение удаленных ресурсов, создание одного или более экземпляров одного или более приложений, доступ к данным и т.д. Например, такой вызов или вызовы могут реагировать на работу оборудования на буровой площадке, условия на буровой площадке и т.д.
[0093] Как показано в примере на Фиг. 2, система 200 может содержать различные элементы и функции, которые могут быть блоками, содержащими схемы и/или инструкции, хранящиеся на одном или более CRM, которые могут выполняться для выполнения одного или более действий. Как показано, блок 280 кластера и/или повторного инициирования может быть функционально связан с блоком 236 регулировки скорости нагнетания насоса. Блок 280 кластера и/или повторного инициирования может быть частью системы 220 управления или может быть функционально связан с системой 220 управления и, например, может использовать один или более удаленных ресурсов 290.
[0094] Что касается контура, содержащего блоки 242, 244 и 246, ниже описаны различные примеры обновлений модели (например, модернизаций).
[0095] В системе 200 один или более интерфейсов, компонентов и т.д. могут обеспечивать ввод данных для управления насосом с учетом данных о пласте-коллекторе, которые могут включать, например, напряжения в пласте-коллекторе, которые могут быть основаны на модели (см., например, блок 270 инфраструктуры).
[0096] Например, система 200 может обеспечивать оптимизацию с учетом данных пласта-коллектора, которая может включать оптимизацию эффективности добычи (например, с течением времени) и, например, одну или более затрат на бурение, заканчивание/осуществление гидроразрыва, а также минимизацию риска инцидентов при гидроразрыве, выпадения расклинивающего агента из жидкости для гидроразрыва и другие потери (например, потеря жидкости и т.д.).
[0097] На Фиг. 3 проиллюстрирован пример блока 320 максимальной мощности. Например, система 220 управления в одном или более вариантов осуществления изобретения может содержать блок 320 максимальной мощности, который может быть блоком максимальной мощности, выраженной в лошадиных силах (например, в л.с., фут-фунт-секундах, ваттах и т.д.). Блок 320 максимальной мощности может содержать блок 322 доступной мощности, который, например, может быть предварительно установлен или иным образом получен блоком 320 максимальной мощности. Например, пользователь может вводить данные о доступной мощности в систему 220 управления, где они могут быть сохранены в блоке 320 максимальной мощности. Например, могут выполняться инструкции для определения максимальной скорости посредством блока 324 определения. Например, можно рассмотреть выполняемые инструкции для использования данных доступной мощности блока 322 для вычисления максимальной скорости для работы по разрыву пласта посредством блока 324.
[0098] Например, максимальная скорость может быть определена одним или более методов расчета скорости потока насоса. Например, известные полученные параметры или их комбинации, такие как мощность насоса в л.с., напор насоса, характеристики жидкости и т.п., могут использоваться для расчета максимальной скорости с использованием модели, основанной на законах физики, или одного или более других типов вычислительных операций. Максимальная скорость, определенная блоком 324 блока 320 максимальной мощности, может использоваться, например, как требуемая скорость нагнетания насоса блока 228 системы 220 управления. Например, система 220 управления может функционировать таким образом, чтобы позволить одному или нескольким насосам 205 работать с максимальной мощностью (например, макс. мощностью в л.с.), если прогнозируемое давление блока 232 не начинает приближаться к пороговому значению давления блока 234.
[0099] На Фиг. 4 проиллюстрирован пример блока 236 регулировки скорости нагнетания насоса, в котором может находиться дополнительный блок 420 максимального давления, при этом блок 420 максимального давления может храниться в блоке 236 регулировки скорости нагнетания насоса или вместе с ним. В одном или более вариантов осуществления изобретения блок 420 максимального давления может быть связан с блоком 236 регулирования скорости нагнетания насоса, но установлен удаленно, например, в облачном ресурсе или в другой части системы 220 управления. Блок 420 максимального давления может содержать инструкции, выполняемые для приема посредством блока 422 приема команды переключения из режима управления на основе скорости потока в режим управления максимальным давлением. Эти инструкции могут предписывать процессору переключать режимы (см., например, один или более процессоров 221, удаленные ресурсы 290 и т.д.), побуждая блок 236 регулировки скорости нагнетания насоса шунтировать входной сигнал от блока 232 прогнозирования давления посредством блока 424 шунтирования. Как показано в примере на Фиг. 4, блок 420 максимального давления может также содержать инструкции, выполняемые для предписания блоку 236 регулировки скорости нагнетания насоса использовать пороговое давление блока 234 порогового давления, например, с предварительно определенным рабочим коэффициентом безопасности (например, запасом или запасом прочности), чтобы получить максимальное значение давления согласно блоку 426 определения. Полученное максимальное давление, как оно было определено, может использоваться блоком 236 регулирования скорости нагнетания насоса для определения скорости нагнетания насоса, которая обеспечивает достижение определенного максимального давления согласно блоку 428 определения. Например, исполняемые команды могут обеспечивать определение скорости потока с использованием блока 240 кривой зависимости давления обработки от скорости нагнетания насоса для согласования требуемого максимального давления с соответствующей скоростью нагнетания насоса. Например, блок 420 максимального давления может затем дать команду блоку 236 регулировки скорости нагнетания насоса отрегулировать подключенный один или более насосов 205 для достижения требуемой максимальной скорости нагнетания насоса в соответствии с блоком 429 регулировки.
[00100] Например, способ может включать использование блока 422 приема для приема команды на переключение в режим максимального давления; шунтирующего блока 424 для шунтирования входного сигнала прогнозируемого давления (например, который может быть предусмотрен для блока 232); блока 426 определения для определения максимального давления с использованием порогового давления, которое может быть уменьшено с требуемым запасом (например, запасом прочности); блока 428 определения для определения скорости нагнетания насоса для достижения максимального давления; и блока 429 регулировки для регулировки скорости нагнетания насоса (например, скорости нагнетания насоса) для согласования с определенной скоростью нагнетания насоса.
[00101] Такой способ может, например, быть реализован с использованием системы 220 управления согласно Фиг. 2, причем способ может выполняться с использованием инструкций блока 236 регулировки скорости нагнетания насоса, например, с соответствующими входными данными (например, согласно блоку 234, блоку 240, одному из одного или более интерфейсов 227, которые могут представлять собой пользовательский интерфейс для переключения режимов и т.д.).
[00102] Например, рабочий процесс многоэтапного разрыва пласта может включать стимуляцию пласта-коллектора посредством перфорационных кластеров, при этом, например, может использоваться подход стимуляции от одного перфорационного кластера к другому, или несколько перфорационных кластеров могут стимулироваться одновременно (например, можно рассмотреть стадию, на которой предусмотрено одновременное стимулирование нескольких перфорационных кластеров). Может быть желательно, чтобы трещины распространялись равномерно от каждого из перфорационных кластеров, что может быть проблематичным в неоднородных зонах, особенно на длинных горизонтальных участках, проходящих через неоднородные пласты-коллекторы.
[00103] Например, рабочий процесс может включать создание перфорационных кластеров, создание кластеров гидроразрыва на стадии обработки и повторное инициирование разрыва из одного или более созданных кластеров гидроразрыва (например, повторно инициированных кластеров гидроразрыва). Например, можно рассмотреть заканчивание горизонтальной скважины с использованием системы интенсификации добычи с установкой мостовой пробки в зоне перфорации, причем секция скважины (например, целевая стадия обработки) перфорируется последовательно с несколькими отдельными целевыми интервалами по глубине (например, измеренные интервалы по глубине). В таком примере каждый интервал перфорации может иметь длину в несколько футов (например, метр и т.д.), чтобы облегчить одиночный разрыв (например, поперечный, продольный, гибридный и т.д.).
[00104] Например, стадия разрыва может включать несколько перфорационных кластеров, причем каждый из перфорационных кластеров может иметь длину порядка 30 см или более (например, один или более футов и т.д.), и при этом каждый из перфорационных кластеров пространственно отделен в соответствии с одним или более измерений (например, одной или более измеренных глубин), которые могут быть порядка приблизительно 5 метров или более (например, от 10 метров до 20 метров и т.д.). Например, параметры проекта могут включать количество стадий, количество кластеров, пространственное разнесение кластеров, длину кластера, количество перфораций и т.д.
[00105] В одном или более вариантов осуществления изобретения система 220 управления может содержать элементы и функции для прямого и/или косвенного автоматического мониторинга кластеров гидроразрыва и, например, повторного инициирования одного или более созданных кластеров гидроразрыва (например, необязательно включая мониторинг повторного инициирования и т.д.). Например, инструкции 225 могут содержать инструкции, выполняемые для выполнения одной или более операций кластеризации и/или для запроса выполнения одной или более операций кластеризации, например, с использованием удаленных ресурсов 290. Как пояснялось, система 200 может содержать кластер и/или блок 280 повторного инициирования, который может быть частью системы 220 управления или функционально связан с системой 220 управления.
[00106] Блок 280 может быть или быть функционально связан с инструментом планирования в реальном времени, который представляет собой вычислительную инфраструктуру с элементами и функциями для определения оценок охвата кластеров гидроразрыва в реальном времени. Такие оценки охвата гидроразрыва в реальном времени могут выводиться и приниматься блоком 236 регулировки скорости нагнетания насоса, например, в качестве обратной связи для регулировки скорости нагнетания насоса и/или давления, в зависимости от ситуации, для достижения требуемого покрытия кластера (см., например, Фиг. 7 и 8).
[00107] При разрыве пласта образование и/или повторное инициирование кластера гидроразрыва может генерировать сейсмическую энергию, как правило, на относительно низком уровне, так что ее можно называть микросейсмической энергией. Микросейсмический мониторинг во время и/или после операции разрыва пласта может обнаруживать микросейсмические излучения, которые могут использоваться для определения соответствующих местоположений микросейсмических событий в качестве причины соответствующих разрушений в горных породах и т.д.
[00108] Система 220 управления может также содержать блок последовательности автоматического отключения при выпадении расклинивающего агента из жидкости для гидроразрыва. Такой блок может содержать инструкции, выполняемые для регулировки максимальной скорости нагнетания насоса и максимального давления, например, с использованием кривой зависимости давления обработки от скорости нагнетания насоса блока 240, порогового давления блока 234 и/или одного или более других входных сигналов для достижения максимальной скорости промывки. Что касается достижения требуемой скорости промывки (например, максимальной скорости промывки и т.д.), это может обеспечить лучшую промывку и повысить вероятность исправления состояния выпадения расклинивающего агента из жидкости для гидроразрыва и снижение вероятности нежелательного взаимодействия с катушкой. Такой подход может также ускорить выполнение гидроразрыва за счет максимального увеличения скорости в конце работы по гидроразрыву и, например, на протяжении всей операции промывки на основе максимально допустимого давления.
[00109] Например, система 220 управления может содержать модель эксплуатационных характеристик или быть функционально связанной с ней. Например, можно рассмотреть модель предполагаемых эксплуатационных характеристик, которая описывает взаимосвязь между давлением обработки и скоростью нагнетания насоса, причем модель предполагаемых эксплуатационных характеристик может использоваться для прогнозирования изменения давления для новой целевой скорости. В таком примере, в котором блок 236 регулировки скорости нагнетания насоса определяет, что должна использоваться новая целевая скорость, модель предполагаемых эксплуатационных характеристик может обеспечить прогноз изменения давления. Что касается примера рабочего процесса, рассмотрим случай, когда в начале операции, система 220 управления использует блок 240 кривой зависимости давления обработки от скорости нагнетания насоса, который может использовать данные, собранные в ходе одной или более операций, выполненных на том же месторождении и/или или аналогичных месторождениях, чтобы информировать блок 236 регулирования скорости нагнетания насоса для выполнения регулировок одного или более насосов 205 во время процесса. Например, кривые для одного месторождения могут быть выбраны в качестве начальных значений по умолчанию. Затем возможность новых давлений может обновляться в процессе выполнения указанной работы.
[00110] На Фиг. 5 проиллюстрирован пример графика 510 операции гидроразрыва пласта (например, работы), пример графика зависимости забойного давления и скорости нагнетания насоса от времени 520 и пример графика 530 зависимости давления обработки от скорости суспензии.
[00111] Например, работа по гидроразрыву пласта с использованием проппанта может включать фазу жидкости разрыва без расклинивающих агентов (например, этап жидкости разрыва без расклинивающих агентов), за которой следует фаза суспензии (например, один или более этапов суспензии). На этапе жидкости разрыва без расклинивающих агентов жидкость для разрыва пласта может закачиваться в скважину для разрыва пласта и создания трещин. Проектирование объема жидкости разрыва без расклинивающих агентов может быть обязательным, поскольку объем созданных трещин имеет тенденцию составлять долю от общего объема «подушки» из-за просачивания жидкости в пласт в зависимости от различных параметров, включая, например, скорость нагнетания насоса, проницаемость пласта, пластовое давление. После нагнетания расчетного объема жидкости разрыва без расклинивающих агентов ожидается, что трещины вырастут до требуемого размера, и можно начинать фазу суспензии. На этапе суспензии жидкость для разрыва пласта смешивают с песком/проппантом в смесителе, и смесь нагнетают в объем трещин, созданный на этапе жидкости разрыва без расклинивающих агентов. После заполнения трещин песком/проппантом работа по разрыву пласта завершается, и насос может быть остановлен. Например, чтобы уменьшить требуемую скорость нагнетания насоса, может использоваться жидкость для разрыва пласта с низкими утечками. Расклинивающие наполнители (проппанты), как правило, используются для удержания трещин в открытом состоянии и могут иметь прочность на сжатие, достаточно высокую, чтобы выдерживать напряжения в пласте, действующие на проппант.
[00112] Например, жидкость для разрыва пласта может содержать одно или более из воды для гидроразрыва или реагента на водной основе для снижения поверхностного натяжения, линейного геля и сшитого геля. Например, вода для гидроразрыва представляет собой воду, содержащую средство для снижения трения и, необязательно, биоцид, поверхностно-активное вещество, разжижитель или добавку для контроля состояния глины. Такая жидкость может иметь относительно низкую вязкость 2-3 сП, что может потребовать относительно высокой скорости нагнетания насоса для транспортировки проппанта. Небольшой размер частиц проппанта, например, 40/70 меш, 100 меш (например, для операций с использованием реагента на водной основе для снижения поверхностного натяжения и т.д.) и т.д., может использоваться с такой жидкостью ввиду ее низкой вязкости, а легкий проппант может использоваться благодаря ее лучшей способности транспортировать проппант. Вода для гидроразрыва, как правило, в наименьшей степени повреждает проппантную набивку и находит особое применение в высокоэффективных скважинах для добычи газа из плотных коллекторов. Например, жидкость может содержать один или более типов вязкоупругих поверхностно-активных веществ в качестве жидкости для гидроразрыва «на водной основе». Например, могут быть включены одна или более жидких добавок, таких как, например, один или более из ингибитора отложений, регулятора pH, неэмульгатора, ингибитора коррозии, высокотемпературного стабилизатора и т.д.
[00113] Линейный гель может быть водой, содержащей гелеобразующий агент, такой как гуар, HPG, CMHPG или ксантан. Другие необязательные добавки могут включать буферы, биоцид, поверхностно-активное вещество, разжижитель и средство для контроля состояния глины. Как указано, в состав жидкости могут быть включены один или более типов добавок, которые могут включать один или более из ингибитора отложений, регулятора pH, неэмульгатора, ингибитора коррозии, высокотемпературного стабилизатора и т.д. Например, жидкость линейного геля может иметь среднюю вязкость 10-30 сП, что может привести к улучшенному переносу проппанта и, например, к более широкому гидроразрыву по сравнению с использованием воды для гидроразрыва. С такой жидкостью можно использовать проппант среднего размера, например, 30/50. Линейный гель имеет тенденцию к большему разрушению проппантной набивки, чем вода для гидроразрыва; линейный гель находит применение как в газовых, так и в нефтяных скважинах.
[00114] Сшитый гель представляет собой воду, содержащую один или более гелеобразующих агентов, которые можно использовать, например, в линейном геле, и сшивающий агент, такой как, например, бор (B), цирконий (Zr), титан (Ti) или алюминий (Al). Другие необязательные добавки могут включать буферы, биоцид, поверхностно-активное вещество, разжижитель и средство для контроля состояния глины. Жидкость сшитого геля имеет тенденцию к обладанию относительно высокой вязкостью 100-1000 сП, что может обеспечивать лучший перенос проппанта и, например, более широкие трещины по сравнению с жидкостью линейного геля для гидроразрыва. С такой жидкостью можно использовать проппант большого размера, например 20/40 и 16/30. Сшитый гель имеет тенденцию к большему разрушению проппантной набивки, чем линейный гель. Сшитый гель может найти применение в нефтяных скважинах и скважинах с высоким содержанием жидкости.
[00115] На графическом примере 510 обозначены напряжения на месте проведения работ и распространение трещин при гидроразрыве. Три основных сжимающих напряжения обозначены стрелками и включают вертикальное напряжение, максимальное горизонтальное напряжение и минимальное горизонтальное напряжение (σv, σHmax и σHmin). Гидроразрывные трещины имеют тенденцию открываться в направлении наименьшего главного напряжения и распространяться в плоскости наибольших и средних напряжений.
[00116] В ходе выполнения операции гидроразрыва пласта (например, работа) наземное оборудование может использоваться для измерения одного или более давлений. Например, рассмотрим оборудование, показанное на Фиг. 1, как используемое для выполнения операции, в которой система 200 согласно Фиг. 2 может содержать различные датчики (например, преобразователи и т.д.), такие как, например, преобразователь 214 давления на устье скважины.
[00117] Например, что касается фазы жидкости разрыва без расклинивающих агентов, на поверхности может быть измерено внезапное падение давления, указывающее на инициирование разрыва, когда закачиваемая жидкость поступает в трещиноватый пласт. Чтобы разрушить породу в заданном интервале (например, в целевой зоне пласта-коллектора), давление инициирования разрыва превышает сумму минимального главного напряжения и прочности породы на растяжение. Для определения давления закрытия трещин операция может предусматривать снижение давления до тех пор, пока оно не покажет, что трещина снова закрылась. В ходе операции может выполняться управление оборудованием для определения давления повторного открытия трещин путем создания давления в зоне до тех пор, пока выравнивание давления не укажет на повторное открытие трещин. Давление закрытия и повторного открытия имеют тенденцию к зависимости от минимального главного сжимающего напряжения. Следовательно, индуцированные давления в скважине должны превышать минимальное главное напряжение для увеличения длины трещин. После инициирования разрыва операция может включать управление работой насосов для создания давления в зоне с целью осуществления запланированной стимуляции (например, одного или более этапов суспензии в фазе суспензии). Во время этой обработки нагнетание используется для повышения давления в зоне до давления распространения трещин, которое превышает давление закрытия трещин. Разность между этими давлениями - это чистое давление, которое представляет собой сумму падения давления на трение внутри трещины и сопротивления кончика трещины распространению.
[00118] Как показано на примере графика 520, во время фазы жидкости разрыва без расклинивающих агентов работы, жидкость закачивают в целевую зону пласта-коллектора с заданной скоростью, обозначенной прямоугольниками, при этом, в ответ на нагнетание жидкости, давление нарастает до пика на уровне давления разрыва, а затем давление падает, указывая на то, что порода разрушилась (например, была разрушена, треснула, разломалась и т.д.). Как показано, нагнетание может быть прекращено, так что давление упадет до давления ниже давления закрытия. Во время последующего цикла нагнетания (например, второго цикла нагнетания) трещина может снова открыться при давлении повторного открытия, которое выше, чем давление закрытия. После нагнетания трещина закрывается и давление спадает. Начальное внутрипоровое давление называют давлением окружающей среды в зоне пласта-коллектора.
[00119] Что касается поддержания трещин в открытом состоянии, чистое давление способствует росту трещин и раздвигает стенки трещины, создавая ширину, достаточную для проникновения суспензии для разрыва пласта, которая может быть суспензией, состоящей из различных химикатов и проппанта, который, как было объяснено, обычно имеют форму твердых частиц, которые удерживают трещину открытой после прекращения нагнетания. Что касается химикатов, как объяснялось, они могут обеспечивать свойства, которые помогают суспендировать проппант (например, модификаторы плотности, модификаторы вязкости и т.д.). Химические вещества могут включать поверхностно-активные вещества (сурфактанты), которые могут быть натуральными и/или синтетическими.
[00120] Как объяснялось, как только нагнетание прекращается, давление внутри трещины спадает, поскольку жидкости текут обратно в скважину или утекают в породу пласта-коллектора. Без проппанта это падение давления может привести к закрытию трещин. Проппант способствует поддержанию трещин открытыми. Проппант обычно используется в песчаниках или сланцах; тогда как в карбонатных пластах может использоваться кислота, если при нагнетании в трещины кислота разъедает пласт, создавая искусственную шероховатость. Например, проппант может использоваться в пласте-коллекторе, который является карбонатным коллектором (например, карбонатным пластом-коллектором).
[00121] Стимуляционная обработка прекращается, когда операторы завершают запланированные операции нагнетания или, например, когда внезапное повышение давления указывает на то, что произошло выпадение расклинивающего агента из жидкости для гидроразрыва. Выпадение расклинивающего агента из жидкости для гидроразрыва - это тип закупорки, например, вызванный образованием перемычки и накоплением, слипанием или застреванием проппанта по ширине трещины, что ограничивает поток жидкости в трещину гидроразрыва.
[00122] Для различных типов работ фаза суспензии (например, этап суспензии) является фазой операции, которая может выполняться с использованием постоянной скорости нагнетания жидкости. Например, скорость нагнетания жидкости (например, скорость нагнетания насоса) может быть определена, и управление оборудованием может быть направлено на поддержание этой скорости. Закачиваемый объем включает дополнительный объем, созданный во время гидроразрыва, и потери жидкости в пласт из-за утечки через проницаемую стенку трещины. Однако скорость потери жидкости на вершине растущей трещины может быть довольно высокой. По существу, для инициирования трещины используется жидкость без проппанта, потому что высокая потеря жидкости может привести к тому, что проппант на вершине трещины достигнет консистенции сухого твердого вещества, что приведет к образованию перемычек и созданию условий для выпадения расклинивающего агента из жидкости для гидроразрыва. Как объяснялось, фаза жидкости разрыва без расклинивающих агентов (например, этап жидкости разрыва без расклинивающих агентов) может быть фазой операции, в которой используется жидкость без проппанта, а фаза суспензии может представлять собой последующую фазу операции, на которой используется проппант.
[00123] При проектировании обработки для гидроразрыва пласта выгодно установить скорость утечки и объем жидкости в фазе жидкости разрыва без расклинивающих агентов (например, «подушки») в зависимости от времени закачки суспензии/проппанта, так что, когда трещина достигает требуемой длины, высоты и ширины, первая частица проппанта достигает вершины трещины. Проектирование работы по гидроразрыву пласта предполагает понимание того, как скорость нагнетания насоса и свойства стимулирующей жидкости влияют на геометрию и распространение трещин гидроразрыва в поле напряжений на месте проведения работ для достижения заданной длины трещин с расклиниванием. Например, можно использовать один или более методов для обнаружения трещин или активации кластеров. Например, рассмотрим один или более анализов трубных волн, одно или более волокон, установленных на обсадной колонне для определения распределения акустических и/или колебательных характеристик (DAS/DVS, от англ. distributed acoustic sensing/distributed vibration sensing) и/или определения распределения температуры (DTS, distributed temperature sensing).
[00124] Операторы могут спроектировать процедуры стимуляции для управления распространением трещины и гарантировать, что трещина гидроразрыва остается в пласте-коллекторе и не «врастает» в соседний пласт (например, другую зону и т.д.). Чтобы снизить риск, можно проводить мониторинг роста трещин. Как объяснялось, жидкость для разрыва пласта заставляет горную породу раскалываться, и трещины растут, небольшие фрагменты породы разламываются, вызывая микросейсмы (например, высвобождение микросейсмической энергии). Оборудование для мониторинга (например, приемники сейсмической энергии) может обнаруживать такие излучения, при этом полученные данные могут быть проанализированы для определения подземных источников микросейсм. Такие микросейсмы обычно следуют за растущими трещинами. Зная направление роста трещины, при проведении операции можно предпринять действия по управлению трещиной или остановить обработку до того, как трещина выйдет за пределы намеченной зоны. Распространение трещин при гидроразрыве подчиняется законам физики. Напряжения на месте проведения работ имеют тенденцию влиять на давление и направление инициирования и роста трещин.
[00125] Например, оборудование на буровой площадке может включать оборудование для мониторинга и управления (M&C, monitoring and control), которое может представлять собой или включать такое оборудование, как оборудование FracCAT (Schlumberger Limited, Хьюстон, Техас). Оборудование FracCAT (компьютерная система для осуществления гидроразрыва пласта) включает аппаратное и программное обеспечение для мониторинга, управления, регистрации данных и составления отчетов о различных типах гидроразрывов. Его отображение в режиме реального времени данных, графиков, схем поверхности и анимации ствола скважин представляют информацию об обработке по мере ее осуществления, что позволяет принимать решения относительно перфораций с использованием подробных данных о работе в режиме реального времени на поверхности. Например, может использоваться инфраструктура, такая как инфраструктура FracCADE (Schlumberger Limited, Хьюстон, Техас), содержащая различные компоненты для проектирования и оценки разрыва.
[00126] Например, система 200 на Фиг. 2 может содержать оборудование, такое как, например, оборудование FracCAT, или быть функционально подключена к нему, и/или включать или быть оперативно подключена к одной или нескольким инфраструктурам, таким как, например, инфраструктура FracCADE. Например, эксплуатационное оборудование может включать оборудование FracCAT, функционально подключенное к компьютеру Центра управления и контроля (CCC, Command and Control Center). Например, могут использоваться одна или более вычислительных инфраструктур, таких как, например, одна или более инфраструктур KINETIX (Schlumberger Limited, Хьюстон, Техас) и инфраструктура FracCADE. Инфраструктура KINETIX может обеспечивать моделирование процесса стимуляции для интенсификации притока в добычу, ориентированное на пласт-коллектор, которое может интегрировать геологию, петрофизику, разработку заканчивания, разработку пласта-коллектора и/или геомеханику, например, для оптимизации проектирования заканчивания и гидроразрыва для скважины, «подушки» или всего месторождения. Например, одна или более инфраструктур могут быть функционально связаны с инфраструктурой или ее частью, такой как инфраструктура PETREL E&P (например, вычислительная платформа). Например, можно использовать одну или более механических и петрофизических моделей, необязательно в сочетании с моделированием пласта-коллектора (например, с использованием средства моделирования ECLIPSE (Schlumberger Limited, Хьюстон, Техас), INTERSECT (Schlumberger Limited, Хьюстон, Техас), средством моделирования геомеханики (например, средство конечно-элементного моделирования геомеханики VISAGE (Schlumberger Limited, Хьюстон, Техас) и т.д. в сочетании с инфраструктурой KINETIX. Например, один или более способов могут включать автоматизированную параллельную обработку в облаке, при котором, например, использование инфраструктуры KINETIX может обеспечить быструю оценку вариантов расстояния между скважинами, их заканчивания и проекта обработки, позволяя изучать тысячи сценариев во временных рамках порядка часов.
[00127] Что касается примера графика 530 на Фиг. 5, он показывает зависимость давления обработки от скорости нагнетания насоса и может называться кривой зависимости давления обработки от скорости нагнетания насоса (см., например, блок 240 системы 200 на Фиг. 2). Как видно, давление обработки увеличивается в зависимости от скорости нагнетания насоса.
[00128] Например, существующие кривые зависимости давления от скорости для аналогичного пласта могут служить отправной точкой по умолчанию для операции. Поскольку данные в реальном времени поступают во время реальной работы по разрыву пласта, модель давления-скорости может обновляться фактическими данными (например, периодически, непрерывно и т.д.).
[00129] На Фиг. 6 проиллюстрирован пример графика 600 модели предполагаемых эксплуатационных характеристик для зависимости давления обработки от скорости нагнетания насоса. Например, обновленная зависимость давления обработки от скорости нагнетания насоса может быть представлена такой моделью предполагаемых эксплуатационных характеристик.
[00130] График 600 может быть специфическим для конкретной операции и может различаться для разных операций. Как уже упоминалось, модель предполагаемых эксплуатационных характеристик может начинаться с кривой по умолчанию, причем алгоритм обновляет ее в реальном времени на основе обратной связи для различных параметров работы. В таком примере по мере выполнения работы обучение может улучшить модель, которая помогает алгоритму решить, как реагировать на изменение давления в скважине, регулируя скорость нагнетания насоса. Например, рассмотрим блок 230 моделей, блок 234 прогнозируемого давления системы 220 управления и блок 236 регулировки скорости нагнетания насоса на Фиг. 2 как функционально связанные с моделью предполагаемых эксплуатационных характеристик, так что при изменении давления в скважине блок 236 регулировки скорости нагнетания насоса может более подходящим образом управлять одним или более насосов 205 для улучшения эксплуатационных характеристик работы и/или для достижения новой скорректированной скорости нагнетания насосов, изменение давления можно спрогнозировать, и его можно использовать в качестве обратной связи для системы 220 управления. Что касается последнего, снова можно рассмотреть контур от блока 236 регулировки скорости нагнетания насоса к блоку 242 загрузки, к блоку 244 обновления модели, к блоку 246 модернизации, к блоку 230 моделей, к блоку 232 прогнозирования давления и обратно к блоку 236 регулировки скорости нагнетания насоса.
[00131] Например, кривая или серия кривых могут быть сгенерированы, сохранены и т.д. и быть доступны для одной или более буровых площадок, одного или более площадок планирования и т.д. Например, для этой цели или целей могут использоваться удаленные ресурсы 290. Например, один или более серверов могут предоставлять доступ к оборудованию, операторам и т.д. на одном или более участков. Местоположение каждой эксплуатационной бригады может определять, какую кривую использовать, и, например, система управления может разумно выбирать кривые с наилучшей начальной точкой.
[00132] Как уже упоминалось, модель предполагаемых эксплуатационных характеристик, которая описывает взаимосвязь между давлением обработки и скоростью нагнетания насоса, может использоваться для прогнозирования изменения давления в случае новой целевой скорости. В начале выполнения работы система может использовать кривую зависимости давления от скорости, полученную из реальных выполненных работ, и система может вносить корректировки по ходу процесса.
[00133] Например, кривые для одного и того же месторождения могут быть выбраны в качестве начальных значений по умолчанию (см., например, данные 250 о соседних скважинах). Затем возможность нового значения давления может обновляться в процессе выполнения работы. На графике 600 каждая сетка представляет достижимость при определенной комбинации скорости и давления по шкале от 0 до 1. Модель предполагаемой зависимости давления от скорости может начинаться с кривых одной или более других работ, выполненных на том же и/или аналогичных месторождениях. На графиках скорость может откладываться по оси x, давление - по оси y, а по оси z - вероятность того, что давление будет достигнуто при требуемой скорости (например, от 0 до 1, от 0 до 100 процентов и т.д.; отмечая, что значения могут не достигать 1 или 100 процентов). Одна или более кривых могут начинаться со значений по умолчанию на основе предыдущих работ, а затем обновляться в режиме реального времени по мере получения новых данных о скорости и давлении для текущей работы. Как уже упоминалось, это может быть выполнено с использованием данных о давлении и скорости в реальном времени, а также с использованием таких данных в качестве входных данных для статистических и/или других уравнений, используемых для построения кривых предполагаемой зависимости давления от скорости.
[00134] На Фиг. 7 проиллюстрирован пример графика операций 710 и пример графика 750, полученного из моделирования кластера гидроразрыва при быстром изменении. Как показано, операции 710 могут включать операцию 712 перфорации и операцию 714 разрыва пласта, причем операция 712 перфорации может создавать перфорационный кластер (PC, perforation cluster), а операция 714 разрыва пласта может создавать кластер гидроразрыва (FC, frac cluster). Как показано, перфорационный кластер может быть кластером перфораций между внутренней поверхностью обсадной колонны и пластом, а кластер гидроразрыва может быть сетью, простирающейся от одного или более перфораций в пласт. В ходе операции 712 перфорации можно эффективно пробивать через обсадную колонну/цемент вокруг ствола скважины по аналогии с «вывеской парикмахера» или по спирали. Например, диаметр перфорационного пистолета может составлять порядка 30 см или более, при этом несколько пистолетов могут быть объединены для получения более длинного интервала перфорации. В фазе после перфорации и до проведения разрыва пласта ствол скважины может содержать ряд перфорационных кластеров (например, пять, как показано на графике 750), причем каждый перфорационный кластер содержит множество пробитий (например, отверстий). Например, 5 PC с 6 пробитиями на PC, всего 30 перфораций (например, 30 отверстий). Что касается разрыва пласта, то количество PC и PC может быть равным; однако FC может быть меньше, чем PC. Например, сеть гидроразрыва (например, FC), созданная из соответствующего PC, может иметь определенный размер, форму, разветвленность и т.д., которые могут отличаться от других.
[00135] График 750 показывает три стадии многоэтапной операции гидроразрыва пласта, при этом каждая стадия включает несколько перфорационных кластеров. Например, в количестве от одного до десяти или больше. В приведенном примере каждая из стадий включает пять перфорационных кластеров (PC). На графике 750 показаны результаты моделирования для стадии, обозначенной X+1, где каждый из пяти перфорационных кластеров на этой стадии имеет соответствующий кластер гидроразрыва. Как показано на графике для операции 714, кластер гидроразрыва для одного перфорационного кластера может быть сетью, причем в результатах моделирования сеть представлена в виде листа, который может иметь соответствующую толщину. В примере на Фиг. 7 стадия, обозначенная X+1, обеспечила создание кластеров гидроразрыва, обозначенных FC1, FC2, FC3, FC4 и FC5. Результаты взяты из моделирования, выполненного с использованием данных испытательной скважины и модели нетрадиционного гидроразрыва (UFM, unconventional fracturing model) с моделью поэтапного увеличения высоты, в которой влияние ослабления напряжения от первого инициированного гидроразрыва на последующие трещины не было включено в расчет разрыва; однако такой подход может быть использован в случаях, когда, например, определение ослабления напряжения может быть выполнено и принято во внимание для скважины и/или соседней скважины. Например, одно или более моделирований могут использовать одну или более вычислительных инфраструктур, таких как, например, вычислительная инфраструктура с одними или более элементов и функций инфраструктуры MANGROVE, инфраструктуры KINETIX и т.д. В примере на Фиг. 7 график нагнетания согласно моделированию использует начальный разрыв при скорости 15 баррелей в минуту с быстрым нарастанием до скорости обработки 90 баррелей в минуту. Моделирование показывает, что пять кластеров гидроразрыва образовываются из пяти соответствующих перфорационных кластеров стадии X+1. Результаты показывают, что каждый из пяти перфорационных кластеров (PC1, PC2, PC3, PC4 и PC5) разрывает пласт с быстрым нарастанием.
[00136] На Фиг. 8 проиллюстрирован пример графика 850 из моделирования кластера гидроразрыва для тех же параметров, что и в примере на Фиг. 7, но с использованием медленного нарастания. Моделирование было выполнено с использованием тех же параметров, что и в примере на Фиг. 7, за исключением того, что скорость нарастания была более плавной (например, более медленной), и моделирование показывает, что образуются три кластера гидроразрыва (FC1, FC3 и FC4), которые соответствуют трем из пяти перфорационных кластеров (PC1, PC3 и PC4). Результаты на Фиг. 7 и 8 показывают, как нагнетание может повлиять на разрыв пласта из перфораций в стволе скважины. Например, может быть выполнено одно или более моделирований, результаты которых могут предоставлять процессу принятия решения информацию об одной или более регулировок скорости нагнетания насоса (см., например, блок 236 системы 200 на Фиг. 2). В таком примере график скорости нагнетания насоса может быть определен как оптимальный для создания требуемых кластеров гидроразрыва из перфорационных кластеров, и, например, такой график может быть скорректирован соответствующим образом в реальном времени во время операции нагнетания, чтобы учесть различные условия, которые могут наблюдаться и отличаться от предусмотренных в одном или более моделирований. Например, условия могут включать условия, связанные с оборудованием, доступной для работы оборудования энергией (например, топливо и т.д.), пластом, жидкостью (например, закачиваемая жидкость), стволом скважины (например, качество перфораций, мусор и т.д.) и т.д.
[00137] Возвращаясь к системе 200 на Фиг. 2, контур, содержащий блок 242 загрузки, может быть частью процесса, который может использовать одно или более средств моделирования (например, вычислительная инфраструктура моделирования) и другие данные для обновления одной или более моделей блока 230 моделей. Как показано, контур может быть контуром обратной связи, при этом следует отметить, что блок 236 регулировки скорости нагнетания насоса также находится в контуре управления с одним или более насосов 205. Опять же, существует связь между скоростью нагнетания одного или более насосов и давлением, при этом одна или более моделей блока 230 моделей могут выдавать одно или более значений давления на основе модели. Точность таких моделей можно контролировать с использованием контура, который может быть частично внешним контуром, использующим один или более ресурсов, которые могут быть внешними по отношению к системе 220 управления.
[00138] Результаты одного или более моделирований, как показано на Фиг. 7 и 8, могут быть введены в систему, систему управления и т.д. Например, такой результат или результаты моделирования могут быть введены в блок 280 кластера и/или повторного инициирования (например, создание и/или повторное инициирование кластера гидроразрыва). В таком примере один или более из блока 280 кластера и/или повторного инициирования и модели предполагаемых эксплуатационных характеристик для кривой зависимости давления обработки от скорости нагнетания насоса (см., например, график 530 на Фиг. 5, график 600 на Фиг. 6 и т.д.) можно использовать для определения оптимизированной скорости нарастания, чтобы максимизировать кластеры гидроразрыва (например, сравните результаты на Фиг. 7 и 8). Как уже отмечалось, например, оптимизированная скорость нарастания может представлять собой график, который можно использовать в качестве основного графика, в который могут быть внесены одна или более корректировок, необязательно в реальном времени, во время операции.
[00139] В одном или более вариантов осуществления изобретения система управления может быть выполнена с возможностью обеспечения оптимизации операции разрыва пласта в реальном времени с использованием измерений давления на поверхности.
[00140] Ограничивающим фактором, который может помешать надежному использованию давления обработки на поверхности (например, давления на устье скважины от датчика 214 и т.д.) для диагностики во время операции нагнетания для гидроразрыва пласта, может быть неопределенность и неточность расчетного трения в трубе, что может привести к ошибкам в вычислении забойного давления, что, в свою очередь, может привести к ошибочной интерпретации роста трещин.
[00141] Одна из причин неопределенности и/или неточности в оценке трения в трубе связана с тем фактом, что жидкость для разрыва пласта содержит один или более химикатов, которые могут действовать как средства уменьшения трения, которые могут представлять собой один или более полимеров, способствующих снижению давления нагнетания и требуемую гидравлическую мощность для обработки, а также обеспечению вязкости, способствующей суспендированию и транспортировке проппанта вглубь индуцированной трещины гидроразрыва.
[00142] Характеристики трения жидкости для разрыва пласта, как правило, весьма чувствительны к составу и количеству химических добавок и, иногда, даже к партиям подаваемых химикатов, а также к качеству и содержанию минералов в воде, используемой для смешивания жидкости. Кроме того, трение в трубе может также зависеть от шероховатости трубы, особенно в случае реагента на водной основе для снижения поверхностного натяжения, который обычно используется при разрыве пласта нетрадиционных пластов-коллекторов. В результате трение жидкости для разрыва пласта в трубе может существенно варьироваться на рабочей площадке для одного и того же указанного состава жидкости.
[00143] Кроме того, общее падение давления на трение, когда жидкость закачивается в трещину с проектной скоростью, имеет тенденцию быть больше, чем так называемое чистое давление, определяемое как давление жидкости в трещине (например, забойное давление минус трение рядом со скважиной), из которого вычитают напряжение на месте проведения работ, которое является давлением, которое обычно анализируется с использованием различных методов анализа давления. Следовательно, небольшие ошибки в потери давления на трение могут затмить изменения чистого давления, которые такие методы анализируют. Это может быть особенно интересно для обработки по разрыву пласта в случае заканчивания с несколькими кластерами в нетрадиционном пласте-коллекторе, поскольку для одновременного распространения нескольких трещин из перфорационных кластеров требуется относительно высокая скорость нагнетания насоса, что приводит к довольно высокому трению в трубе (например, в случае, когда несколько перфорационных кластеров стадии должны использоваться одновременно для обеспечения потока жидкости из ствола скважины в пласт).
[00144] Кроме того, прямое измерение забойного давления с помощью забойных манометров, как правило, не является обычным явлением в горизонтальных скважинах с многоэтапным гидроразрывом ввиду затрат и операционных сложностей, и данные о давлении могут быть получены после завершения запланированных стадий; вместо того, чтобы быть доступными во время работы, чтобы принимать решения в режиме реального времени. В некоторых случаях прямое измерение забойного давления может обеспечиваться, если в скважине развернуты гибкие насосно-компрессорные трубы (CT, coiled tubing) во время гидроразрыва пласта, но это также бывает нечасто из-за более высоких эксплуатационных затрат, связанных с оборудованием для гибких насосно-компрессорных труб на площадке при разрыве пласта. Например, некоторые скважины могут содержать «глухую» трубу, состоящую из соединенных труб; однако «глухая» труба относительно редко применяется при нетрадиционном заканчивании.
[00145] На Фиг. 9 проиллюстрирован пример способа 900, который может использоваться для преодоления неопределенности в характеристиках трения жидкости для разрыва пласта, что в значительной степени делает малопригодным для использования рассчитанные забойные давления при диагностике операций разрыва пласта в реальном времени. Способ 900 может быть реализован, например, с использованием системы, такой как система 200 на Фиг. 2 (см. также, например, систему 2800 на Фиг. 28). Например, система 220 управления может содержать элементы и функции, подходящие для выполнения способа 900.
[00146] Как показано, способ 900 может включать блок 910 приема для приема ввода; блок 912 приема для приема диапазона неопределенности напряжения на месте проведения работ в качестве меры поперечного изменения напряжения среди кластеров из-за неоднородности пласта в горизонтальном направлении или пересечения стволом скважины нескольких литологических слоев; блок 914 определения для определения начального давления разрыва, давления разрыва и/или других значений давления разрыва при различных скоростях; блок 916 согласования для согласования измеренных давлений разрыва, таких как давление разрыва и начальное давление разрыва, с предварительно заданными графиками зависимости давления разрыва от скорости нагнетания насоса; блок 918 определения для определения общего количества открытых перфораций и оценки количества отдельных кластеров для определения эффективности работы по разрыву пласта; и блок 920 оптимизации для оптимизации работы по разрыву пласта за счет увеличения эффективности путем увеличения скорости нагнетания насоса.
[00147] Способ 900 может позволить калибровать падение потери давления на трение во время первых нескольких стадий горизонтальной скважины, чтобы можно было точно определить потери давления на трение, а затем использовать откалиброванные характеристики потери давления на трение для последующих стадий скважины с целью надежного расчета забойного давления, позволяющего диагностировать распространение трещин в режиме реального времени и регулировать один или более параметров нагнетания в зависимости от ситуации для оптимизации операции.
[00148] На Фиг. 10 проиллюстрирован пример графика 1000 скорости нагнетания насоса для суспензии и зарегистрированных данных давления обработки в зависимости от времени обработки для одной из нескольких стадий гидроразрыва в горизонтальной скважине в нетрадиционном пласте-коллекторе.
[00149] В случае заканчивания с использованием системы интенсификации добычи с установкой мостовой пробки в зоне перфорации операция разрыва пласта может включать нагнетание шара с низкой скоростью для попадания шара в изолирующую прокачиваемую пробку, уже установленную в скважине над стадией предыдущего разрыва пласта, чтобы изолировать текущую стадию обработки от одного или более предшествующих разрывов. После попадания шара на пробку может быть сформировано уплотнение, так что жидкости некуда будет течь, кроме как в перфорационные отверстия на текущей стадии, и инициировать одну или более трещин из перфораций. Начальное давление разрыва при такой низкой скорости нагнетания насоса можно определить по давлению обработки. После того, как шар размещен, скорость нагнетания насоса может быть увеличена до скорости обработки, и давление разрыва при скорости обработки может быть определено, как показано на графике 1000 на Фиг. 10. Начальное давление разрыва и давление разрыва при основной скорости обработки можно определить, когда система 220 управления определяет пиковое давление для каждой скорости, за которым следует снижение.
[00150] Например, ISIP (instantaneous shut-in pressure - мгновенное давление при выключении насоса) может быть определено путем экстраполяции наклона графика изменения стабилизированного падения давления до выключения. Как указано, сбор данных может происходить с использованием одного или более датчиков и подходящей системы сбора данных с достаточно высокой скоростью сбора данных. В примере на Фиг. 10 ISIP отражает мгновенное изменение общего трения вдоль пути потока жидкости при падении скорости до нуля. Это включает трение в трубе, трение перфорации и, возможно, потерю давления на трение в области трещины вблизи скважины (также известную как «извилистость», как показано на графике 1430 на Фиг. 14). В конце гидроразрыва, при условии отсутствия преждевременного перекрытия проппанта вблизи скважины или выпадения расклинивающего агента из жидкости для гидроразрыва, перфорации оказываются сильно эродированными проппантом, поэтому трение перфорации существенно снижается по сравнению с его первоначальными значениями, а значит, и извилистость трещин вблизи скважины. Следовательно, можно предположить, что мгновенное падение давления (ΔPfric) связано с трением в трубе; соответственно, градиент потери давления на трение для данной жидкости при данной скорости нагнетания насоса может быть определен как мгновенное падение давления (ΔPfric), деленное на длину трубы.
[00151] Как объяснялось, потери давления на трение при заданной скорости нагнетания насоса может быть определено по изменению давления на поверхности при остановке насоса. Как показано на графике 1000 на Фиг. 10, в конце работы, когда насос работает на закрытую задвижку, давление обработки на поверхности испытывает мгновенное падение до давления, которое называется «мгновенным давлением при выключении насоса» или ISIP. Часто сразу после закрытия давление испытывает короткий период быстрых колебаний, называемых «гидроударами», когда волна давления эхом отражается в стволе скважины. В этом случае экстраполяция крутизны изменения более позднего стабилизированного давления до времени выключения может быть определена как ISIP. Например, один или более типов методов фильтрации данных могут применяться для решения проблемы влияния таких явлений, как гидроудары (например, для генерации отфильтрованных данных и т.д.). Как показано на графике 1000 на Фиг. 10, разница между давлением непосредственно перед выключением и ISIP отражает мгновенное изменение общего трения вдоль пути потока жидкости, когда скорость падает до нуля (см., например, точки 3 и 4). Как указано, это может включать трение в трубе, трение перфорации и, возможно, потерю давления на трение в области трещины вблизи скважины (также известную как «извилистость», как показано на графике 1430 на Фиг. 14). В конце гидроразрыва, при условии отсутствия преждевременного перекрытия проппанта вблизи скважины или выпадения расклинивающего агента из жидкости для гидроразрыва, перфорации оказываются сильно эродированными проппантом, поэтому трение перфорации существенно снижается по сравнению с его первоначальными значениями, а значит, и извилистость трещин вблизи скважины. Например, можно разумно предположить, что мгновенное падение давления, обозначенное как ΔPfric на Фиг. 10, связано с трением в трубе. Следовательно, как уже упоминалось, градиент потери давления на трение для данной жидкости при данной скорости нагнетания насоса может быть определено как мгновенное падение давления (ΔPfric), деленное на длину трубы (см. также, например, график 1230 на Фиг. 12).
[00152] Например, горизонтальную скважину можно дискретно стимулировать (например, разделить для операций дискретной стимуляции) на стадии, количество которых может, например, варьироваться от нескольких до почти 100. Например, в многоступенчатой горизонтальной скважине может использоваться обычный состав жидкости для гидроразрыва. Основываясь на этом соображении, способ может позволить точно определять потери давления на трение жидкости по измеренным данным давления на более ранних стадиях (например, первых нескольких стадиях) и использовать откалиброванные потери давления на трение для более точного расчета забойных давлений для последующих стадий, что может позволить операторам и/или вычислительному оборудованию выполнять одну или более диагностик давления для оптимизации обработок на последующих стадиях в этой же скважине.
[00153] На Фиг. 11 проиллюстрирован пример графика 1100, который представляет собой график с логарифмическим масштабом по обеим координатным осям в соответствии с методом диагностики (Нолти и Смит) на основе наклона кривой зависимости чистого давления от времени (или объема), который можно использовать для определения процесса роста трещин.
[00154] Как указано, график 1100 на Фиг. 11 показывает диагностику, предложенную Нолти и Смитом, на основе наклона кривой зависимости чистого давления от времени на графике с логарифмическим масштабом по обеим координатным осям, который можно использовать для определения процесса роста трещин. Например, отрицательный наклон (A на Фиг. 11) указывает на радиальный рост трещины или чрезмерный рост по высоте; положительный наклон около 0,2 (B на Фиг. 11) указывает на то, что высота трещины сохраняется, и она увеличивается в длину; положительный наклон, равный 1 или больше, указывает на выпадение расклинивающего агента из жидкости для гидроразрыва; почти пологий уклон (C на Фиг. 11) указывает на рост высоты трещины; и так далее.
[00155] Кроме того, может быть выполнено сравнение вычисленного забойного давления для текущей обработки с аналогичной обработкой на предыдущих стадиях в режиме реального времени для обнаружения какой-либо аномальной тенденции изменения давления или отклонения от нормальной тенденции. Реакции на давление в ходе предыдущих работ, в которых наблюдалось выпадение расклинивающего агента из жидкости для гидроразрыва, могут быть проанализированы, чтобы найти одну или более общих сигнатур, которые могут указывать на неизбежные сбои при выполнении работы. Например, один или более методов анализа и обработки данных могут использоваться для обучения вычислительной системы выявлению таких аномалий и отклонений, чтобы они могли автоматически обнаруживаться вычислительной системой для направления предупреждения контроллеру и/или оператору о риске потенциального выпадения расклинивающего агента из жидкости для гидроразрыва или других нежелательных событий.
[00156] Фиг. 12 иллюстрирует пример графика 1210 и пример графика 1230. Как показано, график 1210 представляет собой график с логарифмическим масштабом по обеим координатным осям точек потери давления на трение, определенных по падению давления при мгновенном давлении при выключении насоса (ISIP) для первых нескольких стадий (стадии 1, 2 и 3), которые можно использовать для корректировки кривой потери давления на трение для получения более точных оценок трения.
[00157] Что касается графика 1230, то он показывает данные о потере давления на трение при низких скоростях нагнетания насоса, собранные при выполнении операций с прокачиваемой пробкой (например, операций PDP (pump down plug)), и промежуточных скоростях нагнетания насоса от падения скорости в конце закачки, а также кривая трения во всему диапазону скорости нагнетания насоса, которая соответствует точкам данных. На примере графика 1230 градиент потери давления на трение указан в фунтах на квадратный дюйм (фунт/кв. дюйм) на 1000 футов, тогда как скорость нагнетания насоса приведена в баррелях в минуту (барр/мин). Как показано, различные типы данных могут быть связаны с различными диапазонами скорости нагнетания насоса (например, скоростью нагнетания насоса). Например, данные могут быть получены во время одной или более операций и нанесены на график или иным образом проанализированы для определения одного или более значений потери давления на трение (например, потери давления на трение, градиента потери давления на трение и т.д.).
[00158] Как проиллюстрировано на Фиг. 12, точность кривой трения, показанной на графике 1210 на Фиг. 12, может быть дополнительно повышена в случае наличия дополнительных точек данных потери давления на трение при более низких скоростях нагнетания насоса. Такие данные могут быть получены из измеренного давления при закачке, например, с использованием узла мостовой пробки и перфоратора, называемого прокачиваемой пробкой (PDP, Pump-Down Plug), после того, как стимуляционная обработка трещин на каждой стадии завершена, при подготовке к стимуляции последующей стадии. PDP может быть размещена в скважине на кабеле и прокачиваться с использованием давления жидкости на заданную глубину в горизонтальном участке при относительно низкой скорости нагнетания насоса. Когда насос выключается при достижении целевой измеренной глубины, падение давления при остановке может служить индикатором потери давления на трение при низкой скорости нагнетания насоса.
[00159] Кроме того, как показано на Фиг. 12, дополнительные данные о потере давления на трение могут быть получены в диапазоне средней скорости нагнетания насоса путем использования одного или двух промежуточных уровней скорости в конце закачки для гидроразрыва пласта, в отличие от мгновенного останова, показанного на Фиг. 10. Объединение точек данных может позволить построить более точную и надежную кривую трения, которая более полно охватывает весь диапазон скорости нагнетания насоса, как показано на графике 1230 на Фиг. 12.
[00160] На Фиг. 13 проиллюстрирован пример графика 1310 и пример графика 1330 для способа оценки количества открытых перфораций по измеренному давлению разрыва. График 1310 содержит множество кривых давления разрыва, созданных для различных степеней предполагаемого изменения напряжений, а график 1330 иллюстрирует вычисленное количество открытых перфораций, соответствующих кривой, которая наилучшим образом соответствует измеренному давлению разрыва.
[00161] Как указано, на Фиг. 13 показаны графики 1310 и 1330, иллюстрирующие аспекты способа оценки количества открытых перфораций по измеренному давлению разрыва; (a) множество кривых давления разрыва, построенных для различных степеней предполагаемого изменения напряжений (обозначенные Δσ значения) среди перфорационных кластеров с наложенными измеренными давлениями разрыва; (b) вычисленное количество разорванных перфораций, соответствующих кривым на (a). Из-за неопределенности напряжений на месте проведения работ и свойств породы расчетное количество разорванных перфораций также унаследовало некоторые неопределенности. Если доступна независимая оценка с использованием теста нагнетания, такого как тест ступенчатого расхода, она может предоставить дополнительные точки данных для калибровки/уточнения модели инициирования, описанной выше.
[00162] Например, при остановке в скважине мгновенное давление при выключении насоса (ISIP) (σHmin) можно определить по измеренной кривой падения давления. Разница между забойным давлением перед остановкой и ISIP представляет собой сумму потерь давления из-за трения перфорации и извилистости ствола скважины. Извилистость (например, тип потери давления в околоскважинной зоне (NWPL, near-wellbore pressure loss)) затем может быть получена путем вычитания потерь давления на трение перфорации, Δpperf, из мгновенного падения давления.
[00163] Как указано, график 1210 на Фиг. 12 показывает зависимость потери давления на трение от скорости нагнетания насоса в виде графика с логарифмическим масштабом по обеим координатным осям. При высокой скорости нагнетания насоса поток в обсадной колонне или насосно-компрессорной трубе является турбулентным, и трение в трубе имеет тенденцию следовать по прямой линии. Градиент потери давления на трение при скорости обработки, определенной при остановке, дает единственную точку на графике 1210. Такой подход позволяет перекалибровать кривую трения в соответствии с наблюдаемой потерей давления на трение. Например, одна или более точек данных могут быть получены на одном или более последующих стадий, например, при дальнейшем уточнении кривой трения. Такой подход может также дать представление о неопределенности, как показано на Фиг. 12. При отсутствии существенных отличий в партиях химикатов и достижимости точного управления оборудованием трение жидкости может быть повторяемым от стадии к стадии. Как уже упоминалось, забойное давление можно рассчитать с помощью следующего уравнения:
Pw=Pb - Ph+Pf
где Pb - рассчитанное забойное давление, Pw - давление обработки, измеренное на поверхности, Ph - гидростатический напор столба жидкости, а Pf - рассчитанная потеря давления на трение с использованием калиброванной кривой трения, показанной на Фиг. 12.
[00164] Для получения точного отклика на чистое давление трение перфорации и извилистость в околоскважинной зоне можно исключить из измеренного или вычисленного забойного давления. Если можно оценить компоненты трения перфорации и извилистости, их можно исключить из забойного давления, чтобы обеспечить правильную диагностику давления.
[00165] Извилистость может использоваться как индикатор потенциальных проблем вблизи ствола скважины. Например, высокая извилистость (например, > 500 фунтов на квадратный дюйм) может указывать на некоторые потенциальные проблемы вблизи ствола скважины и риск преждевременного выпадения расклинивающего агента из жидкости для гидроразрыва.
[00166] Поскольку извилистость может указывать на ограничение ширины внутри трещины, разделение извилистости и падения давления на трение перфорации может предоставить дополнительную информацию о состоянии вблизи ствола скважины. Например, потеря давления на трение при перфорации может быть пропорциональна квадрату Q (Q2), тогда как NWPL может быть приблизительно пропорциональна квадратному корню из Q (Q1/2).
[00167] Фиг. 14 иллюстрирует пример графика 1410 и пример графика 1430, которые соответствуют тесту ступенчатого расхода. Как показано, график 1410 содержит изменения давления и изменения скорости потока в зависимости от времени, причем эти изменения нанесены на график 1430, чтобы определить, есть ли доминирующие поведенческие характеристики перфорации в ходе операции в отношении взаимодействия жидкости в подземной среде (например, в зоне пласта-коллектора) и/или существуют ли доминирующие поведенческие характеристики извилистости в ходе операции в отношении взаимодействия жидкости в подземной среде (например, в зоне пласта-коллектора). Следовательно, если мгновенное падение давления возможно при нескольких скоростях нагнетания насоса, график падения давления закачки с падением скорости потока, как показано на графиках 1410 и 1430 на Фиг. 14 (тест ступенчатого расхода), может дать указание на то, обусловлено ли падение давления преимущественно трением перфорации или извилистостью.
[00168] Как уже упоминалось, на Фиг. 14 показан график 1410 реакции давления на тест ступенчатого расхода, в котором скорость нагнетания насоса снижается ступенчато (например, 1, 2 и 3) до полной остановки и соответствующей реакции забойного давления (которое снова может быть более точно вычислено на основе давления на поверхности, регулируя трение в трубе с использованием процедуры, описанной ранее в данном описании). Как показано на графике 1430, построив график зависимости падения давления от падения скорости, можно согласовать кривую отклика, чтобы получить оценку количества открытых перфораций и потери давления из-за извилистости трещин около скважины. Как объяснено, физические явления могут быть пропорциональны скорости потока, что может быть представлено Qn, где n - коэффициент, который может быть меньше единицы или больше единицы (например, возможно, отрицательным). Как объяснялось, для преобладающего поведения перфорации n может быть приблизительно 2 (например, больше 1), а для преобладающего поведения извилистости n может быть приблизительно 0,5 (например, меньше 1).
[00169] Чтобы построить кривые, показанные на графике 1430 на Фиг. 14, инженер может выбрать точку со стабилизированным давлением, соответствующую каждому уровню скорости нагнетания насоса на кривой давления, показанной на графике 1410 на Фиг. 14. Такой ручной подход может сделать процесс трудоемким и подверженным человеческим ошибкам.
[00170] Например, система 200 может содержать один или более блоков, которые могут выполнять тест ступенчатого расхода и/или анализ теста ступенчатого расхода, который можно дополнительно автоматизировать, например, так, чтобы вычислительные ресурсы выбирали точка пошагового изменения давления и скорости. В таком примере один или более тестов ступенчатого расхода могут быть интегрированы в план обработки закачкой без значительного продления времени операции разрыва. Такой подход может, например, обеспечить преимущество в виде дополнительных точек данных для калибровки/дополнения оценки, полученной описанным способом с использованием давлений разрыва.
[00171] Например, в ходе операции может предприниматься одно или более действий для смягчения проблем вблизи ствола скважины, например, путем закачки пачек проппанта для эрозии в околоскважинной зоне. Такой подход может расширить путь потока и уменьшить извилистость. Например, в случаях, когда создается несколько трещин, пачки проппанта могут также способствовать закупориванию некоторых второстепенных трещин и тем самым способствовать распространению требуемой основной трещины.
[00172] Возвращаясь к способу 900 на Фиг. 9, как объяснено, можно выполнять различные действия для определения количества перфораций и кластеров, способствующих потоку. Такие действия могут включать одно или более действий, как описано со ссылкой на Фиг. 10, 11, 12, 13 и 14. Например, можно рассмотреть неопределенность напряжения на месте проведения работ и определить одно или более давлений разрыва при одной или более скоростей.
[00173] Как объяснялось, потеря давления на трение при перфорации может быть пропорциональна квадрату Q (Q2) (см. график 1430, на котором преобладающая перфорация представляет собой ориентированную вверх кривую, стремящуюся к вертикальной асимптоте (например, вогнутую)), в то время как извилистость может быть приблизительно пропорциональна квадратному корню из Q (Q1/2) (см. график 1430, на котором доминирующая извилистость стремится к горизонтальной асимптоте (например, выпуклая)).
[00174] Возвращаясь к системе 220 управления на Фиг. 2, блок 230 моделей содержит Pb (например, забойное давление или Pbh) и Pf (например, потеря давления на трение, вызванное потоком жидкости). Например, одно или более действий, описанных в отношении Фиг. 10, 11, 12, 13 и 14 могут использоваться для информирования, обновления, модернизации и т.д. одной или более моделей блока 230 моделей.
[00175] На Фиг. 10, 11, 12, 13 и 14 во время инициирования работы система 220 управления может быть выполнена с возможностью генерации данных, таких как данные для графика давления для инициирования разрыва на стадии операции разрыва пласта. Система 220 управления может, например, отображать график, а в некоторых вариантах осуществления изобретения отображать график на пользовательском интерфейсе, давление во время первой стадии и определять начальное давление разрыва при более низкой скорости, давление разрыва при скорости обработки, мгновенное падение давления (ΔPfric) и мгновенное давление при выключении насоса (ISIP).
[00176] В реальном графике закачки проппант может добавляться в жидкость для разрыва пласта в увеличивающихся концентрациях. По мере перемещения добавленного проппанта по длинному стволу скважины, концентрация проппанта изменяется на разных глубинах скважины. Чтобы правильно отслеживать движение жидкости и суспензии и концентрацию проппанта в скважине, система 220 управления может содержать алгоритм гидравлики (например, гидравлический блок, гидравлическую платформу и т.д.) для точного вычисления вышеуказанных компонентов давления.
[00177] Забойное давление при распространении трещины можно выразить следующим образом:
Pbh = σh+Pnet + ΔPperf + ΔPtort
где σh - минимальное горизонтальное напряжение на месте проведения работ (например, σHmin), ΔPperf - это падение давления через перфорации, ΔPtort - это потеря давления в околоскважинной зоне из-за извилистости трещины, а Pnet - это чистое давление разрыва пласта, которое зависит от свойств пласта и скорости нагнетания насоса и демонстрирует разное изменение с течением времени для разных моделей роста.
[00178] Другой способ, который может быть реализован с использованием системы управления, может включать вычисление предшествующего стадии ISIP (низкая скорость приблизительно 12 барр/мин) и вычисление ISIP после стадии. Операцию разрыва можно оптимизировать путем сопоставления или сравнения предшествующего стадии ISIP для каждой стадии работы с предыдущими. Если текущее предшествующее стадии ISIP выше, чем предшествующее стадии ISIP для стадий (например, в соответствии с порогом, процентом и т.д.), это может указывать на размещение перфорации в зоне более высокого напряжения и наличие более высокого риска выпадения расклинивающего агента из жидкости для гидроразрыва, что обуславливает изменения в параметрах закачки, такие как повышение вязкости жидкости, снижение концентрации проппанта или другие меры, направленные на снижение вероятности выпадения расклинивающего агента из жидкости для гидроразрыва. В качестве другого примера, если предшествующее стадии ISIP ниже, чем для предыдущих стадий (например, в соответствии с порогом, процентом и т.д.), это может указывать на проникновение в новую зону. В зависимости от характеристик пласта-коллектора это может также привести к возможным ограничениям вблизи скважины и более высокому риску выпадения расклинивающего агента из жидкости для гидроразрыва или нежелательного роста высоты трещины. Например, могут быть выполнены одна или более соответствующих регулировок параметров насоса.
[00179] Например, обработка может начинаться или не начинаться с более низкой скорости нагнетания насоса, чтобы инициировать трещину для «разрыва» пласта. Давление разрыва имеет тенденцию относиться к пиковому давлению на начальной стадии закачки, за которым следует снижение давления, когда трещина(ы) создается(ются) и начинает(ют) распространяться. Во время обработки давление обработки увеличивается и снижается в результате изменений скорости нагнетания насоса, смены жидкости, увеличения плотности суспензии и ее трения по мере добавления проппанта в жидкость, уменьшения плотности и трения при переходе работы к этапу промывки, уменьшения трения перфорации (падение давления через перфорационные отверстия) из-за эрозии проппантом и, наконец, изменений давления, связанных с распространением трещины. Часто оператора может интересовать именно изменение давления в трещине, которое позволит понять, как ведет себя трещина, например, для принятия решений в режиме реального времени об изменении скорости нагнетания насоса или переходе на промывку при преждевременном выпадении расклинивающего агента из жидкости для гидроразрыва, изменения параметров работы, чтобы уменьшить рост высоты трещины или увеличить длину, или прокачать отводные пакеты и т.д.
[00180] Снова обращаясь к способу 900 на Фиг. 9, способ 900 может включать ввод входных данных в систему 220 управления для каждого блока 910, причем входные данные могут содержать, например, свойства пласта, отклонение ствола скважины, ориентацию и размеры, информацию о закачке и расчетные напряжения на месте проведения работ. Данные могут быть предоставлены системе 220 управления, необязательно, с использованием облачного сервера или тому подобного (см., например, удаленные ресурсы 290), в котором установлены параметры оператором или иным способом.
[00181] Способ 900 может также включать обеспечение диапазона неопределенности напряжения на месте проведения работ в качестве меры поперечного изменения напряжения среди кластеров из-за боковой неоднородности пласта или ствола скважины, пересекающего несколько литологических слоев, как показано в блоке 912. Например, неопределенность напряжения на месте проведения работ как мера поперечного изменения напряжения среди кластеров из-за боковой неоднородности пласта или ствола скважины, пересекающего несколько литологических слоев, может быть определена с использованием одного или более методов.
[00182] Способ 900 может также включать определение начального давления разрыва, давления разрыва и других давлений разрыва при разных скоростях, как показано в блоке 914. Например, давления разрыва могут быть определены, как описано в отношении Фиг. 10 (см. также, например, Фиг. 5).
[00183] Способ 900 может также включать согласование измеренных давлений разрыва, таких как давление разрыва и начальное давление разрыва, с предварительно определенными графиками зависимости давления разрыва от скорости нагнетания насоса, например, в блоке 916. На Фиг. 13 график 1310 содержит графики зависимости предварительно определенного давления разрыва от скорости нагнетания насоса с нанесенными на них измеренными давлениями разрыва. Например, система может генерировать один или более предварительно определенных графиков зависимости давления гидроразрыва от скорости нагнетания насоса с использованием данных тех же и/или аналогичных пластов, физических моделей, каротажных диаграмм, а также свойств пластов и неопределенностей.
[00184] Способ 900 может включать определение общего количества открытых перфораций и оценку количества отдельных кластеров для определения эффективности работы по разрыву пласта в блоке 918. Например, система 220 управления может сделать это, используя кривую на предварительно определенном графике зависимости давления разрыва от скорости нагнетания насоса, которая соответствует измеренному давлению разрыва, и сопоставляя ее с общим количеством открытых перфораций, которое соответствует согласованной кривой давления разрыва (см., например, графики 1410 и 1430 на Фиг. 14). Предварительно определенный график общего количества открытых перфораций в зависимости от скорости нагнетания насоса может быть определен, например, с использованием модели инициирования разрыва, данных для тех же и/или подобных пластов, каротажных диаграмм и свойств пласта.
[00185] Способ 900 может оптимизировать конкретную работу по разрыву пласта путем повышения эффективности за счет увеличения скорости нагнетания насоса согласно блоку 920 (см. также, например, блок 236 регулировки скорости нагнетания насоса системы 220 управления на Фиг. 2).
[00186] Например, в одном или более вариантов осуществления изобретения система 220 управления может также поддерживаться связь с бункером, имеющим отводные линии, и может регулировать клапан, чтобы обеспечить предоставление отклоняющих линий для закачки жидкости для разрыва пласта в пласт, и/или оператор может быть проинструктирован системой 220 управления (например, получая выходные данные) о необходимости добавления отклоняющих линий.
[00187] Система 220 управления может также использовать расчетное количество открытых перфораций и соответствующее трение перфораций для регулировки забойного давления для диагностики давления, чтобы обеспечить дальнейшую оптимизацию обработки во время указанной работы.
[00188] Например, система 220 управления на Фиг. 2 может быть откалибрована с использованием одного или более выходных данных анализа, такого как анализ, изображенный на Фиг. 14 (например, для теста ступенчатого расхода).
[00189] Например, система может обеспечить автоматизированный разрыв пласта путем управления парком насосов для увеличения использования активов и выявления насосов, которые не работают на оптимальном уровне. Такая система может использоваться для реализации различных способов, которые могут, например, включать различные типы управления одним или более насосов, другим оборудованием и т.д.
[00190] Насосы для разрыва пласта обычно работают в суровых условиях и требуют технического обслуживания. Регулярное плановое техническое обслуживание насосов может не обеспечивать поддержание каждого насоса в требуемом рабочем состоянии (например, в соответствии со спецификациями производителя). При выполнении работы по разрыву пласта оператор насоса может контролировать состояние насоса, используя показания датчиков и реакции насоса на команды переключения передач/дроссельного вентиля, причем оператор может перевести насос в режим пониженной производительности или отключить его для соответствующего техобслуживания, если насос работает неэффективно. Такой ручной подход к принятию решений оператором полагается на опыт и внимательность оператора. Например, система может обеспечивать автоматическую работу насоса, при которой можно автоматически управлять насосами в режиме пониженной производительности (например, прогнозировать с использованием одной или более моделей, данных в реальном времени, хронологических данных и т.д.) и управлять скоростью нагнетания насоса в соответствии с доступной мощностью в лошадиных силах, что может повысить эффективность работы по разрыву пласта и, например, помочь предотвратить преждевременное повреждение различных активов.
[00191] Например, способ управления скоростью потока парка насосов может включать использование одного или более процессоров, поддерживающих связь по меньшей мере с одной памятью, содержащей предварительно установленную требуемую скорость нагнетания парка насосов. Например, информация почти в реальном времени может передаваться одному или более процессоров, которые могут определять работоспособность каждого насоса в парке насосов с использованием модели профиля риска насоса (PRP, pump risk profile), модели PHM или и того, и другого. В таком примере модель PRP, модель PHM или обе могут храниться в памяти и взаимодействовать с одним или более процессоров. Например, способ может включать получение оценки работоспособности по меньшей мере по одной из модели PRP и модели PHM. Например, система может обеспечивать определение на основании одного или более показателей работоспособности одного или более насосов, которые могут быть отстранены от выполнения операции или переведены на пониженную скорость нагнетания насоса. Такой подход может быть относительным и/или использовать один или более типов фиксированных критериев, которые могут быть связаны с высоким риском отказа, ухудшения состояния, повреждения и т.д. для оборудования. Например, относительный подход может оценивать показатели работоспособности всего парка, в то время как подход с фиксированными критериями может использовать информацию о конкретном насосе, чтобы отключить его или иным образом снизить его производительность, чтобы сохранить насос (например, предотвратить повреждения, не подлежащие ремонту, необходимость в значительном техобслуживании и т.д.).
[00192] Например, один или более процессоров могут определять на основе оценки работоспособности и рабочих характеристик каждого насоса те насосы, которые имеют требуемую скорость нагнетания насоса (например, производительность). В таком примере один или более процессоров могут определить сокращение парка насосов из-за того, что один или более насосов выведены из эксплуатации или работают при пониженной скорости нагнетания насоса. В таком примере один или более процессоров могут также определять величину увеличения скорости нагнетания насоса, требуемую от насосов, которые имеют требуемую скорость нагнетания насоса (например, требуемую производительность). Например, способ может включать один или более процессоров, выдающих команды для выполнения соответствующего действия с одним или более идентифицированных насосов для поддержания требуемой скорости нагнетания насосов в парке насосов.
[00193] Например, система управления парком насосов может содержать по меньшей мере один процессор. По меньшей мере, один процессор может быть связан со множеством насосов и множеством датчиков. В таком примере датчики могут быть связаны со множеством насосов для сбора данных о работе каждого из множества насосов. Такая система может также содержать по меньшей мере одну память, взаимодействующую по меньшей мере с одним процессором. Например, по меньшей мере одна память может содержать по меньшей мере одну модель, касающуюся риска насоса, работоспособности насоса и т.д. (например, модель PRP, модель PHM и т.д.). Например, по меньшей мере одна память может также содержать компьютерные инструкции, чтобы направлять команды по меньшей мере одному процессору предоставить полученные данные модели или моделям, например, для определения оценки работоспособности для каждого насоса парка насосов. В таком примере память может содержать компьютерные инструкции для определения насосов, которые рекомендуется отключить или перевести в режим пониженной скорости нагнетания насоса на основе одной или более оценок работоспособности. Такие инструкции могут содержать инструкции для определения насосов, которые имеют требуемую скорость нагнетания насоса (например, производительность) на основе одной или более оценок работоспособности и, например, одного или более рабочих параметров для каждого из насосов в парке. Например, память может содержать компьютерные инструкции для определения скорости нагнетания насоса парка насосов после того, как один или более идентифицированных насосов отключены или переведены в режим пониженной скорости нагнетания насоса, при этом, например, для насосов, которые необходимо перевести в режим повышенной скорости нагнетания насоса, могут быть заданы настройки на основе определения доступной скорости нагнетания насоса (например, доступной производительности). Например, память может содержать компьютерные инструкции для выдачи команд для выполнения соответствующего действия с одним или более идентифицированных насосов для поддержания требуемой скорости нагнетания насосов парка, которая может быть меньше гипотетической «новой» скорости нагнетания насоса, поскольку можно использовать запас прочности/или принять во внимание ухудшение характеристик (например, что может учитывать график технического обслуживания, ремонт и т.д.). Например, новый парк насосов может иметь новую максимальную производительность в соответствии со спецификациями производителя, однако, поскольку один или более насосов могут выйти из строя, потребовать технического обслуживания и т.д., скорость нагнетания насоса может быть меньше указанной максимальной производительности нового оборудования. Например, система может управлять парком насосов с учетом данных, указывающих на ухудшение характеристик и т.д., а также данных о скорости(ях) нагнетания насоса при выполнении одной или более операций, причем система может оптимизировать использование различных насосов в парке насосов для достижения одной или более целей операции.
[00194] Например, система управления парком насосов может содержать по меньшей мере один процессор и набор компьютерных инструкций, который после получения сигнала побуждает процессор поддерживать как можно более низкую скорость, конфигурируя процессор для: определения насосов с переключением передач; автоматического определения будущей скорости насосов с переключением передач; автоматического выбора компенсирующих насосов; и установки будущей скорости каждого компенсирующего насоса.
[00195] На Фиг. 15 проиллюстрирован пример системы 1500, содержащей насосы 1505, которые содержат спецификации 1506, данные 1507 о работоспособности, ECU 1508 (например, и другие блоки управления) и датчики 1509.
[00196] Как показано, система 1500 содержит систему 1600 работоспособности и управления, которая содержит один или более процессоров 1621, память 1623, инструкции 1625 и один или более интерфейсов 1627, блок 1620 телеметрии контроллера, блок 1630 тегов, блок 1640 спецификаций и моделей, блок 1650 аналитики, блок 1660 данных и оценок работоспособности и блок 1680 управления.
[00197] Как показано, система 1500 содержит систему 1520 управления, которая может содержать различные элементы и функции системы 220 управления по Фиг. 2. Например, как показано в примере на Фиг. 15, система 1520 управления содержит один или более процессоров 1521, память 1523, инструкции 1525 и один или более интерфейсов 1527 наряду с блоком 1522 фильтрации и очистки данных, блок 1524 оценки давления на устье скважины, блок 1526 хронологических данных давления, блок 1528 требуемой скорости нагнетания насоса, блок 1529 текущей скорости изменения давления, блок 1530 моделей, блок 1532 прогнозируемого давления, блок 1534 порогового давления и блок 1536 регулировки скорости нагнетания насоса.
[00198] Как показано, система 1500 содержит различные другие блоки, такие как, например, блок 1540 кривой зависимости давления обработки от скорости нагнетания насоса, блок 1542 загрузки, блок 1544 обновления модели, блок 1546 принудительной модернизации модели (например, для блока моделей 1530, блока 1640 спецификаций и моделей и т.д.), блок 1550 данных соседних скважин, блок 1560 давления закачки, блок 1570 инфраструктур, блок 1580 кластеров/повторного инициирования (например, что касается кластеров гидроразрыва, повторного инициирования кластеров гидроразрыва и т.д.; см., например, Фиг. 7 и 8 и т.д.), и блок 1590 удаленных ресурсов. Один или более таких блоков могут быть функционально связаны или включены в систему 1520 управления и/или систему 1600 работоспособности и управления.
[00199] Как показано на Фиг. 15, система 1500 содержит элементы и функции, дополнительные по сравнению с системой 200, показанной на Фиг. 2, так что различные аспекты, связанные с работоспособностью одного или более насосов в парке насосов, могут быть приняты во внимание для целей управления. Такое управление может включать, например, балансировку нагрузки таким образом, чтобы можно было управлять отдельными насосами по-разному для конкретной скорости нагнетания насоса и/или для конкретного графика скорости нагнетания насоса. Такой подход может быть направлен на оптимизацию одного или более аспектов операций гидроразрыва пласта.
[00200] На Фиг. 16 проиллюстрирован пример парка насосов для гидроразрыва 1630-1, 1630-2 и до 1630-N, которые могут быть смонтированы на салазках, прицепах и т.д. (см. также, например, Фиг. 1). Как показано, парком можно управлять с использованием одного или более компонентов (например, блоков и т.д.) системы 1500 согласно Фиг. 15, причем конкретные блоки могут, например, соответствовать таковым из системы 1600 работоспособности и управления.
[00201] Пример смонтированного на прицепе насоса 1630 показан на Фиг. 16, который содержит двигатель 1632, трансмиссию 1634 и насосный агрегат 1636. Например, двигатель 1632 может обеспечивать мощность свыше 2000 BHP на маховике в условиях SAE, при этом насосный агрегат 1636 функционально соединен с двигателем 1632 через трансмиссию 1634. В такой конфигурации насосный агрегат 1636 может развивать немного меньшую гидравлическую мощность (например, приблизительно 2000 гидр. л.с. (HHP, hydraulic horsepower)).
[00202] HHP можно определить как произведение галлонов в минуту на давление в фунтах на квадратный дюйм, деленное на коэффициент 1715. HHP - это эквивалент в лошадиных силах «подъема» жидкости с объемной скоростью непрерывного потока на высоту в футах, представленный задействованным давлением (как если бы для измерения давления была подключена высокая открытая переливная труба стояка). Вес жидкости напрямую определяет давление в стояке: 520 фунтов на квадратный дюйм - это давление внизу 1000-футового столба жидкости плотностью 10 фунтов/галлон (фунт/галл). Чтобы закачать галлон снизу и переместить галлон через верхнюю часть, необходим эквивалент поднятию 10 фунтов на 1000 футов или 10000 фут-фунтов. Объем 3,3 галл/мин (галлонов в минуту) в этих условиях соответствует 33000 фут-фунт/мин или 1 лошадиной силе (л.с.). Поскольку это расчет гидравлических соотношений, величина называется гидравлической мощностью. Ее можно рассчитать для части или частей системы в соответствии с соотношениями давления. Таким образом, 3,3 галлона в минуту и 520 фунтов на квадратный дюйм или 1715 галлонов в минуту и 1 фунт на квадратный дюйм соответствуют 1 лошадиной силе. Для других свойств перекачиваемой жидкости 520 фунтов на квадратный дюйм будет соответствовать другой высоте, но тому же нагнетанию фут-фунт/галлон.
[00203] Например, двигатель 1632 может содержать элементы дизельного двигателя, такие как, например, четырехтактный дизельный двигатель Detroit Diesel 12V4000. Например, трансмиссия 1634 может содержать элементы трансмиссии, такие как, например, трансмиссия Allison S9820 с переключением под нагрузкой. Например, насосный агрегат 1636 может содержать элементы насосного агрегата, например, пятиступенчатый насосный агрегат SPM QWS-2500SD.
[00204] Как объяснялось, нагнетанием можно управлять с помощью дроссельной заслонки двигателя и коробки передач. В дизельном двигателе дроссельная заслонка двигателя регулирует выходную мощность посредством регулирования количества дизельного топлива, впрыскиваемого в цилиндры двигателя. Например, трансмиссия может иметь ряд передач с соответствующими передаточными числами. Например, рассмотрим следующие передачи и передаточные числа: 1-я передача, 3,75:1; 2-я передача, 2,69:1; 3-я передача, 2,20:1; 4-я передача, 1,77:1; 5-я передача, 1,58:1; 6-я передача, 1,27:1; 7-я передача, 1,00:1; и 8-я передача, 0,742:1. Таким образом, контроллер, предназначенный для управления выходной мощностью двигателя, функционально связанного с насосным агрегатом через трансмиссию (например, «насос», насосная система или система нагнетания), может подавать один или более сигналов, которые могут приводить непосредственно и/или косвенно к одному или более из изменения положения дроссельной заслонки и переключения передач.
[00205] Например, двигатель 1632 может содержать множество датчиков, которые могут включать, например, датчики частоты вращения распределительного вала, температуры всасываемого воздуха, температуры выхлопных газов, температуры выхлопных газов цилиндра, давления масла после фильтра, давления смазочного масла, давления масла перед фильтром, температуры охлаждающей жидкости, температуры масла, температуры наддувочного воздуха, давления наддувочного воздуха, частоты вращения коленчатого вала, давления охлаждающей жидкости, давления насоса неочищенной воды, температуры топлива, давления топлива после фильтра, давления топлива перед фильтром, давления топлива перед внешним фильтр, скорости вращения одного или более турбокомпрессоров, высокого давления топлива, наддувочного воздуха перед рециркуляцией, давление в картере, давления подпиточного насоса, уровня охлаждающей жидкости, адаптации уровня охлаждающей жидкости, уровня охлаждающей жидкости, охлаждения внешней обшивки, уровня перелива топлива, топливного насоса и т.д.
[00206] Например, двигатель 1632 может содержать блок управления двигателем (ECU), который может предоставлять различные типы данных, включая, например, коды неисправностей.
[00207] Возможными кодами неисправностей являются: «Слишком высокая скорость холостого хода» (например, «скорость холостого хода одного из вторичных турбокомпрессоров слишком высока»), «Отклонение скорости» (например, «скорость одного из вторичных турбокомпрессоров отличается от скорости первичного турбокомпрессора»), «Утечка в рампе» (например, «градиент давления в рампе слишком низкий во время запуска или слишком высокий во время остановки (утечка в системе высокого давления или воздух в системе)»), «Неисправность счетчика» (например, «неисправен измеритель потребления»), «Дефект счетчика моточасов» (например, «неисправен счетчик моточасов»), «Слишком высокая мощность» (например, «этот сигнал тревоги возникает, если среднее значение мощности за последние 24 часа превысило указанное максимальное значение») и т.д.
[00208] Коды неисправностей могут определяться одним ECU (или несколькими ECU) на основании сигналов, полученных от одного или более датчиков, и, например, значений, которые могут быть установлены во время производства, при модернизации ECU, на основе хронологических данных операций и т.д.
[00209] Один ECU (или несколько ECU) может указывать на выполнение одной или более задач техобслуживания. Примерами задач техобслуживания являются: проверка уровня моторного масла, визуальный осмотр двигателя на предмет утечек и общего состояния, проверка слива(ов) интеркулера, проверка индикатора обслуживания воздушного фильтра, проверка предохранительных отверстий топливного насоса высокого давления, проверка предохранительных отверстий водяного насоса(ов), проверка двигателя на предмет аномальных шумов при работе, цвета выхлопных газов и вибрации, слив воду и загрязнений из фильтра предварительной очистки топлива, проверка показания манометра дифференциального давления фильтра предварительной очистки топлива, замена топливного фильтра или элемента топливного фильтра, замена воздушного фильтра, замена клапанов впрыска/форсунок, замена фильтра моторного масла при замене моторного масла или самое позднее по истечении интервала (в годах), проверка толщины слоя остатков масла, очистка и замена втулки фильтра не реже, чем при каждой замене масла, выполнение эндоскопического обследования, проверка состояния сцепления, проверка на герметичность и отсутствие повреждений воздуховода между воздушным фильтром и турбокомпрессором с приводом от выхлопной системы двигателя, замена фильтра охлаждающей жидкости, очистка колеса компрессора, проверка зазора клапана, при необходимости регулировка (например, первая регулировка через 1000 часов работы), проверка функционирования стержневого электрода, проверка функции сигнализации дифференциального манометра, проверка производительность насоса, проверка общего состояния опоры двигателя (визуальный осмотр), замена фильтрующего элемента фильтра предварительной очистки топлива и уплотнительного кольца в зависимости от степени загрязнения, самое позднее по достижении предела (времени), замена промежуточного топливного фильтра или фильтрующего элемента, форсунка - сброс параметров компенсации дрейфа (CDC), проверка и очистка масляного индикаторного фильтра и т.д.
[00210] Фиг. 16 иллюстрирует пример способа 1610, который включает блок 1612 телеметрии контроллера для приема данных от парка насосов с 1630-1 по 1630-N; блок 1614 тегов для маркировки тегами принятых данных; блок 1616 аналитики для анализа данных с тегами, необязательно с использованием данных спецификации и одной или более моделей спецификации и блока 1618 моделей и/или с использованием данных о работоспособности и/или оценок работоспособности блока 1620 данных и оценок работоспособности; и блок 1622 управления для вывода одного или более сигналов управления на основе анализа блока 1616 аналитики. В примере способа 1610 могут использоваться одна или более элементов и функций системы 200, показанной на Фиг. 2. Например, система 220 управления может быть функционально связана с блоком 1616 аналитики и/или блоком управления 1622, так что регулировка скорости нагнетания насоса блока 236 регулировки скорости нагнетания насоса может быть адаптирована таким образом, чтобы учитывать условие одного или более насосов в парке насосов от 1630-1 до 1630-N.
[00211] Например, рассмотрим парк насосов, содержащий десять насосов, каждый из которых имеет номинальную мощность 2000 HHP в новом состоянии с соответствующими дизельными двигателями, каждый из которых имеет указанную номинальную мощность более 2000 BHP в новом состоянии. Такой парк может иметь общий номинал 20 000 HHP, который может быть доступен для выполнения одной или более операций гидроразрыва пласта.
[00212] В вышеприведенном примере три из десяти насосов, обозначенные P2, P7 и P9, имеют хронологические данные значений датчиков, кодов неисправностей и технического обслуживания. В таком примере оценки работоспособности для каждого из насосов могут быть определены, по меньшей мере частично, на основе таких данных. Например, P2 может иметь оценку работоспособности 13 баллов по шкале от 0 до 100; P7 может иметь оценку работоспособности 31 балл по этой же шкале; и P9 может иметь оценку работоспособности 95 баллов по этой же шкале. Что касается P2, он может иметь хронологические данные кодов неисправностей об утечки в рампе, которые могут быть связаны с хронологическими данными техобслуживания. Такие проблемы могут быть связаны с тем, как работает двигатель P2, окружающей его средой и т.д. Например, P2 может подвергаться вибрации, которая имеет тенденцию разрушать один или более компонентов рампы. В таком примере вибрация может быть обнаружена с использованием одного или более датчиков, при этом вибрация может быть скоррелирована с одним или более параметров, таких как частота вращения двигателя (например, об/мин), дроссельная заслонка двигателя, передача трансмиссии и т.д. Таким образом, P2 может иметь низкую оценку работоспособности, поскольку его «здоровый» рабочий диапазон ограничен из-за проблем с вибрацией, которые могут влиять на утечку в рампе. Что касается P7, он может приближаться к крайнему сроку техобслуживания и, следовательно, иметь более низкую оценку работоспособности, поскольку риск сбоя увеличивается по мере приближения крайнего срока техобслуживания. Что касается P9, это может быть относительно новый насос без хронологических данных кодов неисправностей и с относительно длительным периодом времени до планового обслуживания, например, когда этот период времени больше, чем время операции гидроразрыва пласта (например, фаза жидкости разрыва без расклинивающих агентов, фаза суспензии, одна или более стадий суспензии и т.д.).
[00213] В вышеприведенном примере блок 1622 управления может выдавать команды управления (например, сигналы управления), которые могут индивидуально управлять одним или более насосов с 1630-1 по 1630-N в парке насосов, где N равно 10. Например, блок 1622 управления может уравновешивать нагрузку, используя один или более дросселей и передач для достижения требуемой скорости нагнетания насоса, которая может быть текущей скоростью нагнетания насоса или скорректированной скоростью нагнетания насоса.
[00214] Что касается управления парком насосов с 1630-1 по 1630-10 при текущей скорости нагнетания насоса, способ 1610 может работать динамически в ответ на данные, получаемые блоком 1612 телеметрии контроллера; например, управление может реагировать на данные датчиков, коды неисправностей и техобслуживание одного или более насосов с 1630-1 по 1630-10.
[00215] Что касается управления парком насосов с 1630-1 по 1630-10 для корректировки скорости нагнетания насоса, способ 1610 может аналогичным образом балансировать нагрузку на основе условий, которые могут быть количественно определены, например, с использованием показателей работоспособности. В таком примере скорректированная скорость нагнетания насоса может содержать график, который требует нарастания и/или поддержания скорректированной скорости нагнетания насоса в течение определенного периода времени. В таком примере способ 1610 может интеллектуально управлять отдельными насосами из парка насосов с 1630-1 по 1630-10, чтобы соответствовать графику, при этом балансируя нагрузку способом, который может отличаться для одного или более насосов из парка насосов с 1630-1 по 1630-10. Например, один насос может быть настроен на конкретную производительность, которая остается постоянной, в то время как другие насосы наращивают и/или замедляют скорость для достижения отрегулированной скорости нагнетания насоса. При таком подходе насос, для которого предписано поддержание постоянных характеристик, может иметь низкий показатель работоспособности, так что его вклад в общую скорость нагнетания насоса включает отсутствие перемещения дроссельной заслонки и/или переключения передачи, чтобы не выводить насос из его текущего установившегося режима работы, вызывая стресс и повышая риск отказа; в то время как насос с высоким показателем работоспособности может работать динамически в течение периода времени, переключаясь в неустойчивые состояния, чтобы обеспечить соответствие отрегулированной скорости нагнетания насоса, при этом указанные изменения могут осуществляться в соответствии с графиком. Такой подход направлен на снижение риска отказов с учетом состояния насоса (например, двигателя, трансмиссии, насосного агрегата и т.д.). Такой подход может быть направлен на максимальное использование «более исправного» оборудования, которым может быть более новое оборудование, при консервативном использовании менее исправного оборудования, которым может быть более старое оборудование.
[00216] Например, способ 1610 может учитывать общую динамику парка, которая может быть характеристикой конкретного парка и может изменяться в зависимости от времени и эксплуатационных требований. Например, парк может быть очень надежным в отношении работы при определенной общей скорости нагнетания насоса и предсказуемым образом менее надежным при работе на более высоких общих скоростях нагнетания насоса.
[00217] Например, способ 1610 может включать аналитику, которая может информировать систему управления, такую как система 220 управления на Фиг. 2. Например, общая мощность парка насосов с 1630-1 по 1630-N может меняться со временем. В таком примере блок 1616 аналитики может вычислить общее значение максимальной выходной мощности, которое может быть в тормозных лошадиных силах (BHP, break horsepower) и/или в гидравлических лошадиных силах (HHP, hydraulic horsepower). Это значение может использоваться системой 220 управления для определения скорости нагнетания насоса и, например, корректировок скорости нагнетания насоса. Например, если общее значение максимальной выходной мощности уменьшается до значения, меньшего порогового значения, может быть направлено одно или более уведомлений, которые могут требовать выполнения действия или действий (например, изменения плана одной или более операций гидроразрыва пласта и т.д.).
[00218] Например, в способе 1610 на Фиг. 16 может использоваться один или более методов машинного обучения. Например, подход машинного обучения может состоять в обучении модели машинного обучения (модель ML) с использованием одного или более входов и одного или более выходов способа 1610. Такой подход может связать спецификации одного или более компонентов насоса с моделью работоспособности, так что оценка работоспособности может быть предсказана перспективным способом для данной эксплуатационной потребности, данного рабочего графика и т.д. Такой подход может облегчить управление отдельными насосами в парке насосов для поддержания скорости нагнетания насоса и/или для регулировки скорости нагнетания насоса, которая может быть необязательно связана с более крупномасштабными сценариями, такими как, например, фаза жидкости разрыва без расклинивающих агентов, фаза суспензии, одна или более стадий суспензии, одна или более других скважин и т.д. Например, способ 1610 может быть нацелен на учет количества работ на нескольких скважинах, которые должны быть выполнены с использованием парка насосов. Если такие скважины удалены от объектов, которые могут предоставить запасные части, сервисное обслуживание, техническое обслуживание и т.д., такой подход может помочь обеспечить выполнение работ на скважинах с меньшим риском простоев (NPT, non-productive time). Такой подход может оптимизировать каждую отдельную работу, в то же время оптимизируя цель выполнения ряда работ.
[00219] В различных примерах системы и/или способы могут использовать данные датчиков насоса в реальном времени, такие как нагрузка двигателя, температура преобразователя трансмиссии, температура моторного масла, температура охлаждающей жидкости, давление на воздушном фильтре, давление наддува двигателя и т.д., в сочетании с общими профилями риска насоса, полученными от компонента централизованной обработки, которым может быть централизованный сервер или централизованная облачная платформа, для определения состояния работоспособности насоса во время его работы. Если условие превышает определенный установленный порог, насос можно перевести в режим пониженной производительности, чтобы избежать нарушения хода операции. Информацию о работоспособности в режиме реального времени можно использовать для прогнозирования/инициирования соответствующего технического обслуживания на площадке, чтобы вернуть насос в требуемое рабочее состояние.
[00220] Например, автоматизированная система управления может быть выполнена с возможностью оптимального распределения скорости нагнетания насоса в соответствии со спецификациями одного или более насосов из парка насосов. Как объяснялось, насосы могут переводиться в режим меньшей производительности в ходе операции, если различные типы компонентов системы могут определять, когда насосы выходят из строя, и побуждать контроллер перераспределять нагрузку и/или выводить вышедший из строя насос из работы для проведения его техобслуживания.
[00221] Например, система и/или способ могут использовать параметры насоса (например, нагрузку двигателя, температуру, давление наддува двигателя и т.д.), полученные от датчиков в режиме реального времени, для идентификации и классификации состояния насоса или его работоспособности. Такой подход может включать использование выходных данных одного или более ECU, например, в виде кодов неисправностей.
[00222] В одном или более вариантов осуществления изобретения данные в реальном времени предоставляются компоненту центральной обработки для обновления профиля риска насоса (например, оценки работоспособности и т.д.), который может быть дополнительно отправлен на локальный контроллер, шлюз или их комбинацию для уточнения состояния насоса/состояния работоспособности и составления прогнозного плана технического обслуживания на площадке.
[00223] В одном или более вариантов осуществления изобретения контроллер может быть выполнен с возможностью использования алгоритма управления для принятия состояния/работоспособности насоса в качестве входных данных и автоматического перераспределения скорости нагнетания насоса для оптимизации работы насоса с ухудшенными характеристиками в соответствии с его состоянием работоспособности. Такой подход может быть поддержан концепцией доступности насоса по передаче и скорости вращения двигателя (например, положение дроссельной заслонки и т.д.), что означает, что при данных внешних условиях (например, давлении и т.д.) и работоспособности насоса некоторые рабочие состояния, определяемые передачей и скоростью вращения двигателя, отмечены как доступные, а другие - как недоступные.
[00224] Преимущество полностью автоматизированной работы на основе условий позволяет лучше управлять насосами/проводить их техобслуживание и оптимизировать использование имеющегося оборудования/мощности на площадке.
[00225] Например, ухудшение состояния насоса может быть отражено одним или более параметров насоса, измеренных датчиками, поданных на выход одного ECU (или нескольких ECU) и т.д. Если один или более таких параметров превышают определенные пороговые значения, указывают, что скорость изменения является слишком высокой, или их комбинацию, контроллер может быть выполнен с возможностью автоматического переключения насоса на одну или более более низких передач (например, с соответствующим понижением скорости работы). В зависимости от того, обладают ли остальные доступные насосы большей производительностью и позволяет ли давление обработки, контроллер может принять решение о компенсации пониженной скорости насоса с ухудшившимися характеристиками с использованием одного или более других насосов. Например, скорость изменения можно определить, взяв производную первого порядка от измеренных параметров по времени.
[00226] Например, температура моторного масла у насоса может быть получена с использованием датчика, связанного с насосом, и полученная температура моторного масла может быть сравнена с пороговой температурой моторного масла. В таком примере, если температура моторного масла превышает пороговое значение в течение предварительно определенного периода времени, контроллер может быть выполнен с возможностью уменьшения нагрузки и скорости на этом насосе и восполнения скорости за счет увеличения скорости на других насосах.
[00227] В одном или более вариантов осуществления изобретения насос может иметь блок управления трансмиссией (TCU, transmission control unit) и блок управления двигателем (ECU) или их комбинации. TCU и ECU могут быть предоставлены производителем насоса, двигателя, трансмиссии и т.д. TCU и ECU могут быть запрограммированы производителем на обнаружение определенных неисправностей в трансмиссии насоса и двигателе насоса, используя множество датчиков на насосе. Как уже упоминалось, ECU может определять и выводить коды неисправностей. Например, TCU может определять и выводить коды неисправностей. TCU, ECU или их комбинации могут отправлять сигналы тревоги в контроллер, которые могут содержать конкретные данные, информацию и т.д. (например, коды неисправностей, меры по устранению и т.д.). Например, контроллер может затем использовать сигналы тревоги отдельно или в сочетании с другими собранными данными. Например, TCU может отправить предупреждение о том, что передача теряет блокировку, и контроллер затем может использовать эту информацию, чтобы уменьшить скорость нагнетания для этого насоса и увеличить скорость нагнетания для одного или более других насосов.
[00228] В другом примере один или более датчиков, связанных с насосом, могут использоваться для получения температуры преобразователя трансмиссии и сравнения ее с заданным пороговым значением, при этом, если полученная температура преобразователя трансмиссии превышает пороговую температуру, система может быть выполнена с возможностью переключения на более низкую передачу или выключения насоса и компенсации скорости за счет других насосов.
[00229] В другом примере один или более датчиков, связанных с насосом, могут использоваться для измерения температуры охлаждающей жидкости двигателя, и температура охлаждающей жидкости двигателя может сравниваться с предварительно определенным пороговым значением, причем, если полученная температура охлаждающей жидкости двигателя превышает пороговую температуру, система выполнена с возможностью переключения на более низкую передачу или выключения насоса и увеличения скорости на одном или более других насосов.
[00230] В другом примере один или более датчиков, связанных с насосом, могут использоваться для сбора данных о нагрузке на двигатель и сравнения нагрузки на двигатель с предварительно определенным пороговым значением, причем, если полученные данные о нагрузке двигателя превышают пороговую нагрузку, система выполнена с возможностью соответствующего снижения скорости насоса и восполнить скорость нагнетания за счет одного или более других насосов. В одном или более вариантов осуществления изобретения управление может пометить этот насос для непрерывного мониторинга, и если нагрузка падает ниже порогового значения нагрузки двигателя, автоматически снять ограничение скорости на насосе и предпринять соответствующие действия для уменьшения скорости других насосов для поддержания требуемой общей скорости парка насосов.
[00231] Например, система может использовать одну или более моделей риска на основе данных (например, модель профиля риска насоса (PRP) и модель PHM), исполняемых с использованием локальных и/или удаленных ресурсов для прогнозирования работоспособности насоса и определения оценки работоспособности с использованием данных о работе и техническом обслуживании насоса. При двухмодельном подходе, PRP и PHM, обе модели могут давать оценки риска для каждого отдельного актива/насоса, чтобы указать вероятность отказа. Оценки риска могут охватывать насос в целом и основные компоненты насоса (двигатель, трансмиссию, приводную часть и гидравлическую часть, причем последние две являются узлами насосного агрегата, такого как насосный агрегат 1636 на Фиг. 16).
[00232] Модель PRP может быть моделью риска, основанной на хронологических данных использования насоса (например, часы работы, пробы масла, количество ходов поршня, хронологические данные давления, общее количество смен и т.д.), и может дополняться и обновляться с использованием данных в реальном времени. Модель PHM может быть моделью анализа данных, основанной на измерениях физических датчиков насоса (например, температуры, давления, напряжения и т.д.). Например, оценки риска, полученные с помощью этих моделей риска, могут использоваться контролером в режиме реального времени. Реальное время может быть определено как почти мгновенное (например, с учетом частоты дискретизации и т.д.) и может включать задержку при обмене данными (например, телеметрия и т.д.). Например, режим реального времени может быть мгновенным, если связь между контроллером и моделями имеет нулевую задержку. Однако, если связь между контроллером и моделями имеет задержку в 1 минуту, тогда «в реальном времени» может означать мгновенно плюс 1 минута. В общем, «в реальном времени» означает мгновенно плюс задержка или другое время задержки системы. Другое время задержки системы может включать временную задержку передачи, временную задержку получения, временную задержку обработки или другие системные задержки. Например, контроллер может затем использовать оценки риска в качестве входных данных для оптимизации распределения скоростей и соответственно запускать насосы, исходя из их рисков отказа. Например, если насосу присвоена оценка высокого риска, контроллер может быть настроен на снижение скорости этого насоса.
[00233] Например, различные типы управления могут быть распределены по системе, которая может выполнять контролируемые или поддающиеся контролю операции гидроразрыва пласта. Например, ECU может быть локальным по отношению к двигателю, TCU может быть локальным по отношению к трансмиссии, блок управления насосным агрегатом (PUCU, pump unit control unit) может быть локальным по отношению к насосному агрегату, при этом каждый из этих типов локализованных блоков управления может управлять локализованными элементами и функциями (например, термостат системы охлаждения дизельного двигателя, регулятор установки топливного насоса, который регулирует давление топлива, скорость потока топлива и т.д. относительно установки и т.д.). Такие блоки могут иметь относительно низкую задержку. Такие блоки могут содержать один или более интерфейсов, так что они могут быть функционально связаны с интерфейсами одной или более систем управления и т.д., которые обеспечивают управление скоростью нагнетания насоса и/или балансировку нагрузки и скорости нагнетания насоса в парке насосов.
[00234] На Фиг. 17 проиллюстрирован пример системы 1700, которая выполнена с возможностью выполнения мониторинга работоспособности и управления парком насосов для разрыва пласта. Например, система 1700 может содержать различные элементы и функции системы 1500 согласно Фиг. 15 или наоборот. Как показано, система 1700 может содержать контроллер 1702, множество насосов 1740, шлюз 1720 и компонент 1730 центральной обработки.
[00235] Контроллер 1702 может содержать процессор 1704 контроллера, блок 1706 телеметрии контроллера и инструкции 1708 управления. Процессор 1704 контроллера может поддерживать связь с насосами 1740 через блок 1706 телеметрии контроллера, а шлюз 1720 может также поддерживать связь с блоком 1706 телеметрии контроллера. Модуль 1706 телеметрии контроллера может реализовывать один или более типов протоколов передачи данных, включая Modbus, транспорт телеметрии очередей сообщений, TCP/IP, SNMP и т.п.
[00236] Процессор 1704 контроллера может также быть связан с инструкциями 1708 управления. Инструкции 1708 управления могут храниться на энергонезависимом машиночитаемом носителе данных (CRM, computer readable storage medium). Инструкции 1708 управления могут конфигурировать процессор 1704 контроллера для управления насосами 1740 на основе состояния работоспособности (например, оценки работоспособности и т.д.), данных в реальном времени, спецификаций производителя, параметров работы, инструкций и/или информации, предоставляемой шлюзом 1720, компонент 1730 центральной обработки инструкций и/или информации или их комбинации.
[00237] Каждый насос из множества насосов 1740 может содержать один или более датчиков 1750. Датчики могут использоваться для сбора данных о давлении, температуре, нагрузке и т.п. для соответствующего насоса. Например, каждый насос может иметь множество датчиков, которые могут регистрировать давление преобразователя трансмиссии, температуру преобразователя трансмиссии, температуру охлаждающей жидкости двигателя и нагрузку на двигатель для соответствующего насоса, другие данные о двигателе и эксплуатационные характеристики могут быть получены с помощью датчиков.
[00238] Шлюз 1720 может содержать блок 1722 маркировки тегами данных, блок 1724 аналитики, хранилище 1726 данных оценки работоспособности, блок 1728 обработки данных, процессор 1721 шлюза и блок 1723 телеметрии шлюза. Блок 1723 телеметрии шлюза может использоваться для связи с блоком 1706 телеметрии контроллера и компонентом 1730 центральной обработки.
[00239] Блок 1722 маркировки тегами данных может быть набором компьютерных инструкций на CRM, который конфигурирует процессор 1721 шлюза для применения идентификационных тегов к наборам данных. Идентификационные теги могут идентифицировать актив (например, и местоположение) насоса, связанного с данными. Например, блок 1722 маркировки тегами данных может иметь индекс параметров идентификации, связанных с метаданными, а блок 1722 маркировки тегами данных может инструктировать процессор сопоставлять метаданные полученных данных с метаданными в индексе, чтобы идентифицировать и обеспечивать надлежащую маркировку для связанного насоса, позволяя маркировать и ассоциировать данные с соответствующим насосом (например, используя информацию об устройстве в метаданных, которая связана с параметрами идентификации в индексе).
[00240] Блок 1724 аналитики может содержать один или более наборов компьютерных инструкций на одном или более CRM. Блок 1724 аналитики может содержать компьютерные инструкции, предназначенные для подачи команды процессору 1721 шлюза для сравнения полученных маркированных тегами данных с одним или более пороговых значений для определения рабочего состояния каждого из насосов, модели PHM, которая использует хронологические данные в модуле данных о работоспособности, текущие данные в реальном времени и аналитику эксплуатационных характеристик для обновления оценки работоспособности каждого из насосов и принятия соответствующих мер на основе оценки работоспособности каждого из насосов, модель PRP, которая использует данные в реальном времени и хронологические данные компонента централизованной обработки для определения профиля риска для каждого из насосов и выдачи команды контроллеру для перевода насосов с высокой оценкой риска в режим с ухудшенными характеристиками для техобслуживания, снижения нагрузки на насосы с высокой оценкой риска или их комбинации.
[00241] Хранилище 1726 данных оценки работоспособности может получать определенную оценку работоспособности для каждого из насосов от компонента централизованной обработки и сохранять оценку работоспособности для каждого насоса. Модуль 1728 обработки данных может быть выполнен с возможностью приема данных оценки работоспособности от компонента 1730 центральной обработки, определения по идентификации тега насоса, связанного с оценкой работоспособности, и сохранения данных в хранилище данных оценки работоспособности в таблице, которая позволяет процессору 1721 шлюза связать оценку работоспособности, данные в реальном времени и т.п. или их комбинацию с соответствующим насосом.
[00242] Компонент 1730 центральной обработки может иметь компонент 1732 телеметрии компонента центральной обработки, компонент 1733 обработки данных, компонент 1734 хронологических данных насоса, блок 1736 аналитики и один или более процессоров 1738 центральной обработки. Компонент 1730 центральной обработки может быть выполнен в виде облачной службы, распределенной системы обработки, центрального сервера или их комбинации.
[00243] Компонент 1732 телеметрии компонента центральной обработки может быть выполнен с возможностью обеспечения связи со шлюзом 1720. Компонент 1732 телеметрии компонента центральной обработки может предоставлять данные компоненту 1733 обработки данных компонента центральной обработки, а компонент 1733 обработки данных компонента центральной обработки может использовать информацию тегов для размещения полученных данных в соответствующей организации и структуре, чтобы обеспечить ассоциацию данных с соответствующим насосом.
[00244] Компонент 1730 центральной обработки данных содержит компьютерные инструкции для выдачи команды процессору 1738 компонента центральной обработки о направлении данных в реальном времени компоненту 1734 хронологических данных насоса. Компонент 1734 хронологических данных насоса может быть базой данных, упорядоченной по номеру тега и соответствующему насосу. Компонент 1734 хронологических данных насоса, который связан с другими компонентами компонента 1730 центральной обработки, включая процессоры 1738 компонента центральной обработки, может хранить информацию, такую как снабженные временными метками данные температуры, данные давления, количество смен, часы работы и другие данные, предоставленные датчиками и/или пользователем. Другие данные могут включать записи о техническом обслуживании, данные об образцах масла и т.п. или их комбинации.
[00245] Блок 1736 аналитики может взаимодействовать с одним или более процессоров 1738 центральной обработки и может содержать инструкции, чтобы процессоры 1738 центральной обработки запускали одну или более моделей, хранящихся в модуле аналитики, для прогнозирования работоспособности каждого насоса, обеспечивая ранжирование работоспособности на основе профиля риска насоса или других моделей для прогнозирования работы насосов. Модели для прогнозирования работоспособности каждого насоса могут включать модель PHM, которая использует аналитику данных, содержащую хронологические данные и данные в реальном времени для каждого насоса, чтобы предоставлять оценку работоспособности для каждого насоса. Модель PRP, которая использует хронологические данные насоса и данные в реальном времени для определения риска для каждого насоса и назначения или определения плана техобслуживания для каждого из насосов. Также могут быть включены другие модели.
[00246] В одном из примеров работы контроллер, используя процессор контроллера, связанный с компьютерными инструкциями и информацией, введенной пользователем, может установить требуемую скорость нагнетания насоса, управляя каждым из насосов, чтобы достичь скорость нагнетания насосов парка в соответствии с операционным планом разрыва пласта. Например, пользователь может ввести операционный план разрыва пласта и спецификацию для каждого из насосов в парке насосов для разрыва пласта (например, номинальная мощность в лошадиных силах, максимальная скорость нагнетания насоса и т.п.), а затем компьютерные инструкции могут запустить доступные насосы для достижения скорости нагнетания насосов парка в соответствии с операционным планом разрыва пласта и могут автоматически регулировать скорость на основе измерений давления на устье скважины (см., например, систему 200 на Фиг. 2). Операционный план разрыва пласта может быть создан независимо от контроллера. Операционный план разрыва пласта может быть составлен, например, с использованием различных методов, описанных в заявке на патент США № 2012/0179444, озаглавленной: «System and Method for Performing Downhole Stimulation Operations», поданной 29 января 2007 г., которая включена в настоящий документ посредством ссылки.
[00247] Контроллер 1702 может быть связан с датчиками с 1750-1 по 1750-N. Датчики могут возвращать полученные данные контроллеру вместе с соответствующими метаданными. Метаданные могут содержать информацию о времени, информацию об устройстве и т.д. Связь с датчиками может осуществляться через TCU, ECU, напрямую и т.п. или с использованием их комбинации.
[00248] Полученные данные и соответствующие метаданные могут затем передаваться в шлюз 1720 через контроллер. Например, блок 1706 телеметрии контроллера может содержать соответствующий протокол и компьютерные инструкции, которые при выполнении вызывают отправку данных в шлюз 1720.
[00249] Процессор 1721 шлюза может использовать сохраненный индекс и связанные компьютерные инструкции в модуле маркировки тегами данных, чтобы сопоставить идентификационную информацию в метаданных полученных данных с идентификационной информацией насоса в сохраненном индексе, чтобы предоставить идентификационный тег для полученных данных, который может использоваться, чтобы гарантировать то, что данные связаны с соответствующим насосом, информация маркировки тегами данных может также предоставлять или идентифицировать временную метку для полученных данных с использованием метаданных. Соответствующим образом помеченные данные затем могут быть сохранены и/или переданы в модуль аналитики, компонент центральной обработки через модуль телеметрии шлюза или их комбинации.
[00250] В одном или более вариантов осуществления изобретения граничные вычисления могут выполняться процессором шлюза через модуль аналитики. Модуль аналитики может иметь одну или более моделей. Модели могут содержать модель PHM, модель PRP или другие аналогичные модели, управляемые данными, законами физики или гибридными моделями. Одной из моделей может быть аналитическая модель, которая использует данные, полученные в реальном времени, для определения оценки риска для работоспособности каждого насоса. Оценка риска для работоспособности каждого из насосов может сравниваться с пороговым значением, и если она смещена от порогового значения на предварительно определенное значение для одного или более насосов, то процессор может получать инструкции о направлении инструкций назад контроллеру для уменьшения нагрузки на соответствующие насосы, выведения насосов из эксплуатации в ходне операции и перераспределения мощности для поддержания требуемой скорости нагнетания насоса и т.п. Модуль аналитики может также содержать предварительно сохраненные пороговые значения для давления в преобразователе трансмиссии, температуры преобразователя трансмиссии, температуры охлаждающей жидкости двигателя и значения нагрузки двигателя, и может подавать команду процессору о сравнении полученных данных для каждого из рабочих параметров с пороговым значением, и если пороговое значение превышено или значение приближается к нему, процессор может получить инструкции в виде компьютерных инструкций в модуле аналитики, чтобы отправить сигнал процессору контроллера для выведения из работы насосов, полученные данные для которых превышают пороговое значение, и отрегулировать работу оставшихся насосов для поддержания требуемой скорости нагнетания насоса.
[00251] Данные в реальном времени, которые правильно помечены тегами, также могут быть отправлены в компонент центральной обработки через модуль телеметрии шлюза. Компонент центральной обработки может использовать компьютерные инструкции в модуле обработки данных компонента центральной обработки, чтобы дать команду процессору внести помеченные данные в надлежащую организацию с использованием соответствующего насоса, временной метки и т.п.
[00252] Компонент центральной обработки может также содержать модуль аналитики компонента центральной обработки, который может быть похож на модуль аналитики, описанный в отношении модуля аналитики шлюза. Модуль аналитики компонента центральной обработки может также содержать модель профиля риска насоса, которая обновляется с использованием полученных данных и использует хронологические данные об эксплуатации насоса, хранящиеся в компоненте 1734 хронологических данных насоса, для определения оценки риска для каждого насоса.
[00253] Рассчитанная оценка риска для каждого насоса может быть отправлена обратно в шлюз, и модуль обработки данных может дать команду процессору шлюза поместить оценку риска в хранилище данных оценки работоспособности, используя идентификационную информацию, связанную с каждым насосом. Процессор шлюза может также получить инструкции, чтобы определять, отклоняется ли предоставленная оценка риска для каждого насоса от предварительно определенного порогового значения, и, если пороговое значение достигается, процессор шлюза может получить инструкции, чтобы отправить сигнал в процессор контроллера, чтобы дать команду процессору контроллера предпринять соответствующие действия.
[00254] Модуль аналитики в компоненте центральной обработки, шлюз, контроллер или их комбинации могут содержать одну или более моделей PHM, моделей профиля риска насоса, предварительно определенных пороговых значений для рабочих параметров и других компьютерных инструкций, позволяющих определять состояние каждого насоса.
[00255] Различные элементы и функции системы 1700 по Фиг. 17 могут быть включены в систему, такую как система 1500 по Фиг. 15. Например, система 1600 работоспособности и управления может содержать различные элементы и функции системы 1700 на Фиг. 17.
[00256] На Фиг. 18 проиллюстрирован другой пример системы 1800, выполненной с возможностью осуществления мониторинга работоспособности и управления парком насосов для разрыва пласта (см., например, насосы с 1740-1 по 1740-N).
[00257] Система 1800 содержит насосы с 1740-1 по 1740-N, датчики с 1750-1 по 1750-N, контроллер 1802 и компонент 1730 центральной обработки.
[00258] Контроллер 1802 может содержать блок 1706 телеметрии контроллера, блок 1824 аналитики, инструкции 1708 управления, блок 1822 маркировки тегами, процессор 1704 контроллера и блок 1826 данных оценки работоспособности. Блок 1706 телеметрии контроллера может быть связан с компонентом 1730 центральной обработки, насосами с 1740-1 по 1740-N и датчиками с 1750-1 по 1750-N.
[00259] Команды 1708 управления могут конфигурировать процессор 1704 контроллера для управления насосами с 1740-1 по 1740-N на основе состояния работоспособности, данных в реальном времени, спецификаций производителя, параметров работы, команд и/или информации компонента 1730 центральной обработки или их комбинаций.
[00260] Блок 1822 маркировки тегами может быть набором компьютерных инструкций для одного или более CRM, так что набор компьютерных инструкций конфигурирует процессор контроллера для применения идентификационных тегов к наборам данных, которые идентифицируют актив и местоположение насоса, связанного с данными (например, возможность использования языка разметки, структуры данных, базы данных или баз данных SQL и т.д.). Блок 1822 маркировки тегами данных, например, может иметь индекс параметров идентификации и сопоставлять параметры идентификации с метаданными полученных данных, тем самым позволяя маркировать и связывать данные с соответствующим насосом (например, используя информацию об устройстве в метаданных, связанную с параметрами идентификации в индексе). Блок 1822 маркировки тегами может быть таким же или аналогичным блокам, описанным выше или ниже в данном документе.
[00261] Блок 1824 аналитики может содержать один или более наборов компьютерных инструкций на одном или более CRM. Блок 1824, 324 аналитики может иметь компьютерные инструкции для использования полученных данных и сравнения данных с одним или более пороговых значений для определения рабочего состояния каждого из насосов, компьютерные инструкции для использования хронологических данных в блоке 1826 данных оценки состояния, текущих данных в реальном времени и аналитики эксплуатационных характеристик для обновления оценки работоспособности каждого из насосов и принятия соответствующих мер на основе оценки работоспособности каждого из насосов, модели PHM, модели PRP, которая использует данные в реальном времени и хронологические данные из компонента 1730 центральной обработки для определения профиля риска для каждого из насосов и выдачи команды контроллеру о переводе насосов с высокой оценкой риска в режим с ухудшенными характеристиками для техобслуживания, снижения нагрузки на насосы с высокой оценкой риска или их комбинации.
[00262] Блок 1826 данных оценки работоспособности может генерировать и/или принимать определенную оценку работоспособности для каждого из насосов с 1740-1 по 1740-N от компонента 1730 центральной обработки и сохранять оценку работоспособности для каждого насоса. Например, способ может включать использование идентификационных данных тега, определение насоса, связанного с оценкой состояния работоспособности, и сохранение данных в хранилище данных оценки работоспособности, например, в формате таблицы, который позволяет процессору шлюза связывать оценку работоспособности и данные в реальном времени с соответствующим насосом.
[00263] Блок 1736 аналитики компонента центральной обработки может также содержать модель PRP, которая обновляется полученными данными и использует хронологические данные об использовании насоса, сохраненные в компоненте 1734 хронологических данных насоса, для определения оценки риска для каждого насоса. Блок 1736 аналитики компонента центральной обработки может также содержать модель PHM, которая использует аналитику с данными в реальном времени для определения оценки работоспособности. Блок 1736 аналитики компонента центральной обработки может содержать модель PRP, модель PHM и одну или более других моделей, которые являются моделями, основанными на законах физики, на данных или гибридными моделями либо их комбинации.
[00264] Например, вычисленная оценка риска для каждого насоса может быть сгенерирована и/или получена контроллером 1802, а блок обработки данных контроллера 1802 может дать команду процессору 1704 контроллера поместить оценку риска в хранилище данных оценки работоспособности, используя идентификационную информацию, связанную с каждым насосом. Процессор 1704 контроллера может также получать инструкции об определении того, смещена ли предоставленная оценка риска для каждого насоса от предварительно определенного порогового значения, так что процессор 1704 контроллера может получать инструкции касательно выполнения соответствующего действия.
[00265] В ходе операции контроллер 1802 может поддерживать связь с насосами с 1740-1 по 1740-N и компонентом 1730 центральной обработки через блок 1706 телеметрии. Процессор 1704 контроллера, использующий вводимые контроллером и/или пользователем данные о требуемой скорости, доступной мощности и технических характеристиках насоса, может быть сконфигурирован инструкциями 1708 для управления одним или более насосов с 1740-1 по 1740-N для достижения требуемого давления с нагрузкой, распределенной между насосами в соответствии со спецификацией и/или состоянием каждого насоса, чтобы обеспечить запуск при оптимальных эксплуатационных характеристиках. Например, балансировка нагрузки может включать равномерную или неравномерную балансировку нагрузки в соответствии с характеристиками насоса или насосов.
[00266] По мере продолжения операции разрыва пласта контроллер 1802 может принимать полученные данные о параметрах скорости нагнетания насоса и связанных метаданных, которые содержат идентификационные данные.
[00267] Например, блок 1822 маркировки тегами данных может содержать инструкции по конфигурации процессора для определения идентификационной информации устройства и предоставления соответствующей информации маркировки тегами для данных, чтобы должным образом связать данные с соответствующим насосом (например, необязательно с его местоположением). Например, данные с тегами могут быть отправлены в блок 1824 аналитики, сохранены в базе данных, которая организована для приема должным образом маркированных тегами данных таким образом, чтобы можно было идентифицировать совпадающие данные для соответствующего насоса или их комбинации.
[00268] Блоки 1824 аналитики могут использовать данные с тегами для сравнения одного или более рабочих параметров с предварительно определенными пороговыми значениями. Если данные превысили предварительно определенный порог, блок 1824 аналитики может отправить информацию в процессор 1704 контроллера, инструктируя процессор 1704 предпринять соответствующие действия для оптимизации работы парка насосов с 1740-1 по 1740-N, при этом поддерживая требуемую скорость нагнетания насоса.
[00269] Блок 1824 аналитики в одном или более вариантов осуществления изобретения может содержать компьютерные инструкции для использования хронологических данных в блоке 1826 данных оценки работоспособности, текущих данных в реальном времени и аналитики эксплуатационных характеристик для обновления оценки работоспособности каждого из насосов и принятия соответствующих мер на основе оценки работоспособности каждого из насосов, модели профиля риска, которая использует данные в реальном времени и хронологические данные из компонента 1730 центральной обработки для определения профиля риска для каждого из насосов и выдачи команды контроллеру 1802 о переводе насосов с высокой оценкой риска в режим с ухудшенными характеристиками для техобслуживания, снижения нагрузки на насосы с высокой оценкой риска или их комбинации.
[00270] Обновленный профиль риска и данные в реальном времени могут быть отправлены в компонент 1730 центральной обработки, чтобы обновить данные блока 1736 аналитики центральной обработки оценками риска, вычисленными блоком 1824 аналитики контроллера, и данными в реальном времени.
[00271] В одном или более вариантов осуществления изобретения блок 1706 телеметрии контроллера может передавать данные с тегами в компонент 1730 центральной обработки, блок 1736 аналитики компонента центральной обработки может вычислять оценку работоспособности и отправлять оценку обратно в контроллер 1802, а контроллер 1820 может быть выполнен с возможностью выполнения соответствующих действий. Как указано, контроллер 1802 может быть выполнен с возможностью генерации (например, вычисления и т.д.) одной или более оценок работоспособности. Например, оценки работоспособности могут быть распределены и основаны на определениях, сделанных с использованием одного или более компонентов, систем, блоков управления и т.д.
[00272] Фиг. 19 иллюстрирует другой пример системы 1900, выполненной с возможностью осуществления мониторинга работоспособности и управления парком насосов для разрыва пласта.
[00273] Система 1900 может содержать контроллер 1902, связанный с компонентом 1730 центральной обработки, насосами с 1740-1 по 1740-N и датчиками с 1750-1 по 1750-N. Как показано, контроллер 1902 может быть сконфигурирован с использованием специальных компьютерных инструкций 1950, которые инструктируют процессор 1704 контроллера обмениваться данными с компонентом 1730 центральной обработки после ввода в эксплуатацию на площадке. Контроллер 1902 может содержать блок 1960 телеметрии. Блок 1960 телеметрии может быть таким же или подобным блокам, описанным выше или ниже в данном документе.
[00274] Компьютерные инструкции 1950 могут подавать команду процессору 1704 контроллера запрашивать у блока 1736 аналитики компонента центральной обработки модели для парка насосов, хронологические данные для парка насосов и использовать входную информацию для парка насосов. Например, компьютерные инструкции 1950 могут предписывать процессору 1704 контроллера отправку запроса информации путем отправки идентификационного номера контроллера и запроса обновления, компонент 1730 центральной обработки может содержать индекс, который может идентифицировать информацию идентификации контроллера в таблице данных. Таблица данных может содержать информацию, которая предоставляется пользователем (например, или вычислительной системой), которая идентифицирует насосы, связанные с контроллером 1902, местоположение контроллера 1902 и другую рабочую информацию.
[00275] Компонент 1730 центральной обработки может получать модели для связанных насосов с 1740-1 по 1740-N и датчиков с 1750-1 по 1750-N, хронологические данные для связанных насосов, спецификации для связанных насосов и т.п. и отправлять связанную информацию в контроллер 1902, а контроллер 1902 может хранить информацию в соответствующем множестве блоков 1970. Например, один или более описанных здесь блоков могут быть включены во множество блоков 1970. Например, множество блоков 1970 может содержать блок 1722 маркировки тегами данных, блок 1724 аналитики, блок 1726 данных оценки работоспособности, блок 1728 обработки данных, хранилище вводимой пользователем информации, другое хранилище или блоки данных, описанные в данном документе. В одном или более вариантов осуществления изобретения информация может храниться в блоке аналитики из множества блоков 1970, блоке хронологических данных работоспособности из множества блоков 1970, другом блоке или блоках из множества модулей 1970 или их комбинациях.
[00276] После того, как обновленная информация сохраняется в контроллере 1902, контроллер 1902 может быть сконфигурирован с использованием компьютерных инструкций 1950 для автоматического начала операции разрыва пласта или начала операции разрыва пласта после получения вводимых оператором данных. Чтобы начать операцию разрыва пласта, процессор 1704 контроллера может быть проинструктирован посредством компьютерных инструкций 1950, хранящихся в контроллере 1902, идентифицировать введенные или полученные целевые значения скорости, информацию о парке насосов, включая спецификации каждого из насосов с 1740-1 по 1740-N, а затем оптимально распределять нагрузку среди множества насосов с 1740-1 по 1740-N из парка насосов для достижения (например, и/или поддержания) целевой скорости нагнетания насоса. Как указано, может быть предоставлен график, который требует динамического регулирования скорости нагнетания насоса по времени, например, для увеличения или уменьшения скорости.
[00277] При проведении операции разрыва пласта контроллер 1902 может принимать данные, полученные от датчиков 1750-1-1750-N, которые получают данные о рабочих условиях насосов с 1750-1 по 1750-N. Полученные данные могут быть аналогичны полученным данным, описанным выше или ниже в данном документе. Полученные данные могут содержать метаданные, содержащие идентификационную информацию для соответствующего отдельного ассоциированного насоса. Контроллер 1902 может быть выполнен с возможностью использования, посредством компьютерных инструкций 1950, метаданных для предоставления правильной идентификационной метки для данных и сохранения полученной в реальном времени даты в соответствующей таблице данных и связывания ее с соответствующим насосом и временной меткой. Правильно помеченные тегами полученные данные также могут быть предоставлены блоку аналитики из множества блоков 1970.
[00278] Блок аналитики из множества блоков 1970 может подавать команду контроллеру 1704 сравнить полученные данные с предварительно определенными пороговыми значениями и подавать команду процессору 1704 контроллера предпринять соответствующие действия в зависимости от того, превышены ли пороговые значения или приближаются ли значения к ним, как описано в данном документе. Такой блок аналитики из множества блоков 1970 может также использовать одну или более аналитических моделей для присвоения значений риска для работоспособности каждому из насосов, и процессор 1704 контроллера может прилучать инструкции для принятия соответствующих действий.
[00279] Контроллер 1902 может периодически отправлять помеченные тегами полученные данные, обновленную информацию о работоспособности, обновлять аналитические модели в компоненте 1730 центральной обработки для хранения и использования на новой площадке.
[00280] На Фиг. 20 проиллюстрирован пример способа 2000 управления парком насосов для разрыва пласта для учета индикации ухудшения характеристик одного или более насосов парка насосов.
[00281] Как показано, способ 2000 включает блок 2010 использования для использования контроллера, связанного с парком насосов для разрыва пласта, который должен работать с требуемой общей скоростью и/или давлением по меньшей мере в ходе части работы по разрыву пласта; блок 2012 запуска для начала работы каждого из насосов в соответствии с первой нагрузкой с использованием контроллера и информации, относящейся к рабочим характеристикам каждого насоса из парка насосов; блок 2014 приема для приема данных в реальном времени о эксплуатационных характеристиках и/или работе каждого из насосов с использованием множества датчиков; блок 2016 сравнения для сравнения данных в реальном времени для каждого насоса, прямо и/или косвенно, с одним или более предварительно заданных пороговых значений для каждого насоса; блок действий 2018 для принятия соответствующих мер, если определено, что один из насосов подвержен риску выхода из строя или не работает в соответствии со спецификациями.
[00282] Способ 2000 может включать использование контроллера, связанного с парком насосов для разрыва пласта, который имеет требуемую общую скорость нагнетания насоса для работы по разрыву пласта. Требуемую общую скорость и/или давление для работы по разрыву пласта можно вводить в контроллер с использованием одного или более методов. Например, скорость нагнетания насоса может быть введена вручную через графический интерфейс пользователя, отображаемый на дисплее, который является частью вычислительного устройства или функционально связан с ним, или, например, скорость нагнетания может быть получена через систему, такую как система управления 220 согласно Фиг. 2 (см., например, блок 236 регулировки скорости нагнетания насоса).
[00283] Например, требуемая общая скорость для парка насосов для разрыва пласта может быть введена в хранилище данных, связанное с процессором контроллера посредством ввода пользователем информации в контроллер, скачивания из центра центральной обработки, в который была введена информация планировщиком работ, связанным с контроллером через компонент центральной обработки, при этом планировщик работ связан с контроллером, другим типом контроллера и т.д. Такая связь может быть проводной, беспроводной или с использованием другого типа или типов телеметрии. В одном или более вариантов осуществления изобретения часть может вводиться с использованием компонента центральной обработки, а другие части могут вводиться локально оператором, вводящим информацию с использованием пользовательского интерфейса.
[00284] Способ 2000 может включать наличие процессора контроллера, использующего информацию, относящуюся к рабочим характеристикам каждого насоса из парка насосов, для запуска каждого из насосов и установки нагрузки для каждого насоса на уровне первой нагрузки. Например, процессор контроллера может получать команду пуска от оператора, и компьютерные инструкции, связанные с процессором контроллера, могут указывать процессору применить нагрузку для каждого насоса с использованием рабочих характеристик и требуемой скорости и/или давления. Характеристики могут включать максимальную скорость нагнетания насоса, максимальную мощность, эксплуатационные характеристики насоса, оптимальную рабочую кривую и т.п. В одном примере процессор контроллера может выполнять это, извлекая общую требуемую скорость нагнетания насоса, общее количество насосов, оптимальную рабочую скорость для каждого насоса и суммируя скорость нагнетания насоса каждого насоса, работающего в оптимальном диапазоне, сравнивая сумму с требуемой скоростью нагнетания насоса и выведения из работы одного или более насосов, если сумма скорости нагнетания насосов слишком велика, или если сумма меньше требуемой скорости, определяя насосы с характеристиками максимальной рабочей нагрузки, нагрузка которых может быть увеличена и по-прежнему оставаться ниже максимальной рабочей нагрузки, и увеличивая скорость каждого насоса до тех пор, пока сумма скорости нагнетания насосов не сравняется с требуемой скоростью парка насосов. Как только количество насосов определено и нагрузка для каждого насоса определена, процессор контроллера может запустить насосы с определенной скоростью.
[00285] Способ 2000 может включать получение данных в реальном времени о эксплуатационных характеристиках и/или работе каждого из насосов с использованием множества датчиков. Затем способ 2000 может включать сравнение данных в реальном времени каждого насоса с предварительно определенным пороговым значением для каждого отдельного насоса. Такое сравнение может выполняться процессором контроллера, процессором шлюза, связанным с контроллером, или компонентом центральной обработки, связанным с контроллером через прямую или косвенную связь. Примером прямой связи центрального компонента обработки с контроллером может быть сотовая или спутниковая связь между модемом на контроллере и модемом, поддерживающим связь с центральным компонентом обработки. Пример косвенной связи может включать модуль телеметрии контроллера, связывающийся с модулем телеметрии шлюза на шлюзе, и модуль телеметрии шлюза или другой модем, связывающийся с модемом или модулем телеметрии компонента центральной обработки.
[00286] Способ 2000 может включать направление инструкций процессору контроллера, чтобы предпринять соответствующее действие в случае, если определено, что один из насосов подвержен риску выхода из строя или не работает в соответствии со спецификациями. Например, если парк насосов состоит из десяти насосов, данные в реальном времени могут включать температуру моторного масла для первого насоса и температуру моторного масла для второго насоса и т.д. для каждого насоса в парке насосов. Например, блок аналитики контроллера в шлюзе, в компоненте центральной обработки или их комбинации могут сравнивать данные в реальном времени, относящиеся к первому насосу, с пороговым значением температуры моторного масла для первого насоса и данные в реальном времени, относящиеся ко второму насосу, с пороговым значением температуры моторного масла для второго насоса и так далее. Если насосы в парке имеют температуру моторного масла, которая не приближается к пороговому значению или не превышает его, контроллер может поддерживать работу в устойчивом состоянии, однако, например, если определено, что температура моторного масла насоса в реальном времени выше порогового значения для температуры моторного масла первого насоса, контроллер может получить инструкции, чтобы уменьшить нагрузку первого насоса, насколько это возможно, и увеличить скорость других девяти насосов в пределах спецификаций, чтобы поддерживать требуемую рабочую скорость нагнетания насоса при снижении нагрузки и износа первого насоса. Например, если скорость нагнетания остальных насосов может быть увеличена, чтобы обеспечить дополнительные 10 процентов от требуемой скорость нагнетания насоса, но при этом не будет допущен выход за пределы их спецификаций, то нагрузка на первый насос будет снижена на 10 процентов.
[00287] В другом примере блок аналитики в контроллере, шлюзе, компоненте центральной обработки или их комбинации может вводить данные в реальном времени в модель PHM и модель PRP, PHM может использовать данные в реальном времени для определения оценки работоспособности с использованием аналитики данных, а модель PRP может использовать хронологические данные, предварительно предусмотренные и связанные с модулем аналитики, данные в реальном времени и модель анализа данных для расчета оценки работоспособности, и если индивидуальные оценки работоспособности или среднее значение показателей работоспособности ниже заданного значения, контроллер может вывести насос из работы или уменьшить нагрузку, чтобы предотвратить отказ насоса, одновременно увеличивая нагрузку на другие насосы для поддержания требуемого давления. В качестве дополнительной иллюстрации парк насосов может включать десять насосов, и данные в реальном времени, относящиеся к часам работы, давлению масла, температуре охлаждающей жидкости, условиям нагрузки и т.п., могут быть получены для каждого из насосов. Модуль анализа данных может содержать модель насоса PHM для каждого из десяти насосов и модель PRP для каждого из десяти насосов. Данные в реальном времени для каждого насоса могут вводиться в соответствующие модели PHM и соответствующие модели PRP. Каждая из моделей может генерировать оценку работоспособности для соответствующего насоса, и если оценки выше предварительно определенного значения, контроллер будет поддерживать парк в стабильном режиме работы; однако, если оценка или среднее значение, связанное с одним из насосов, ниже допустимой оценки работоспособности, могут быть предприняты соответствующие действия. Например, если первый насос имеет одну низкую оценку работоспособности и другую высокую, можно взять среднее значение, а если среднее значение ниже предварительно определенной оценки, первый насос может быть переведен в режим пониженных характеристик или отключен, если обе оценки низкие для первого насоса, первый насос может быть переведен в режим пониженных характеристик или отключен, а если одна оценка работоспособности первого насоса низкая, а другая его оценка работоспособности высокая, и среднее значение выше предварительно определенного значения, тогда первый насос можно поддерживать в устойчивом состоянии. Такой же процесс можно выполнить и для других девяти насосов. В другом примере оценка работоспособности второго насоса и первого насоса может быть ниже предварительно определенного значения, и первый насос и второй насос могут быть отключены, а скорость остальных восьми насосов может быть увеличена до максимально допустимой или обеспечивающей поддержание скорости нагнетания парка насосов на требуемом уровне. В различных примерах скорость нагнетания насоса может называться производительностью, например, производительностью, соответствующей указанной скорости нагнетания насоса. Например, парк насосов может иметь динамическую производительность, которую можно отслеживать с использованием системы или систем. Такой подход может включать оценку требуемой производительности для выполнения операции и уравновешивания этой требуемой производительности, если это возможно, по меньшей мере среди некоторых отдельных насосов в парке насосов. Как уже упоминалось, система может управлять парком насосов, используя определенные эксплуатационные знания о парке насосов, которые могут включать информацию о передачах, текущей передаче, требуемых переключениях передач для соответствия нагрузке и т.д. Таким образом, система может реализовать динамический процесс управления, который может учитывать изменения в различных условиях в парке насосов, при этом, например, нагрузка (например, в виде скорости нагнетания насоса для операции) может быть динамической (см., например, систему 200 на Фиг. 2).
[00288] Блок аналитики может сравнивать конкретные данные о эксплуатационных характеристиках с пороговыми значениями и может вычислять оценки работоспособности, а затем принимать решения на основе результатов. Например, оценки работоспособности могут быть высокими, и когда одно из конкретных данных эксплуатационных характеристик может быть ниже порогового значения, но одно из конкретных данных эксплуатационных характеристик может превышать пороговое значение, контроллер может выполнить регулировку для снижения нагрузки на насос, у которого данные о эксплуатационных характеристиках превышают пороговое значение. В другом примере оценки работоспособности могут быть хорошими, а конкретные данные эксплуатационных характеристик могут быть ниже пороговых значений, поэтому процессор контроллера может обратиться к предварительно определенным правилам, которые могут определять, следует ли поддерживать работу в устойчивом состоянии или требуется корректировка. Степень снижения в случае, если пороговое значение превышено или оценка работоспособности низкая, может быть предварительно определена и установлена в компьютерных инструкциях для процессора контроллера или в аналитической модели. Например, используя результаты блока аналитики, требуемое рабочее давление и/или скорость, максимально допустимую нагрузку на каждый насос, чтобы определить, как отрегулировать нагрузку на парк насосов для поддержания оптимальной работы и уменьшения износа или неожиданного отказа одного или более насосов.
[00289] На Фиг. 21 показан способ 2100, который может включать использование одного или более блоков, таких как, например, полная модель профиля риска насоса (PRP) на основе блока 2110 хронологических данных использования насоса, блока 2112 моделей профиля риска множества основных компонентов и данные в реальном времени, полученные во время работы насосов, для динамического обновления одной или более моделей профиля риска в блоке 2114. Такие блоки можно использовать в способе, который включает присвоение оценки работоспособности одному или более насосов.
[00290] Например, способ может включать использование полной модели PRP на основе хронологических данных использования насоса для вычисления оценки работоспособности. Модель может использовать хронологические данные, относящиеся к часам работы, образцам масла оборудования, взятым во время планового технического обслуживания, количеству ходов, хронологических данных давления, количеству смен, предыдущему техническому обслуживанию и т.п. для вычисления оценки работоспособности. Такие данные могут быть получены вместе с данными, собранными во время работ по разрыву пласта, введены пользователями, или может применяться их комбинация.
[00291] Например, способ может включать использование множества моделей профиля риска основных компонентов. Например, могут использоваться модели профиля риска основных компонентов, которые могут включать модели профиля риска для двигателя, трансмиссии, приводной и гидравлической части. В таком примере модели профиля риска могут включать хронологическую информацию для каждого из соответствующих основных компонентов.
[00292] Например, способ может включать использование данных в реальном времени, полученных во время работы насосов, для динамического обновления одной или более моделей профиля риска. Например, можно рассчитать оценку работоспособности всего насоса и каждого из основных компонентов. Например, оценка работоспособности для всего насоса и каждого из основных компонентов может быть средней, чтобы обеспечить оценку работоспособности системы для насосной системы (см., например, насос 1630 на Фиг. 16).
[00293] На Фиг. 22 проиллюстрирован пример способа 2200, который включает в себя блок 2210 использования для использования аналитической модели, выполненной с возможностью прогнозирования отказа насоса на основе одного или более параметров, и блок 2212 обеспечения для предоставления модели PHM одного или более рабочих параметров одного или более насосов, которые получают в режиме реального времени в ходе выполнения операции разрыва пласта для вычисления оценки работоспособности.
[00294] Например, способ может включать использование аналитической модели, выполненной с возможностью прогнозирования отказа насоса на основе одного или более рабочих параметров, причем, например, рабочие параметры могут содержать температуру, давление, напряжение и т.п. В таком примере модель может использовать статистические и другие аналитические данные для определения вероятности того, что насос выйдет из строя при обнаружении тех или иных рабочих параметров.
[00295] Например, способ может включать предоставление одного или более рабочих параметров одного или более насосов, полученных в режиме реального времени в ходе выполнения операции разрыва пласта, в модель PHM, причем модель PHM использует предоставленные рабочие параметры в режиме реального времени для расчета оценки работоспособности.
[00296] Фиг. 23 иллюстрирует пример системы 2330, которая включает использование цифровых аватаров для управления насосами в парке насосов для разрыва пласта. В одном или более вариантов осуществления изобретения множество цифровых аватаров 2310, соответствующих множеству насосов, могут быть связаны с контроллером, шлюзом или компонентом центральной обработки. Каждый цифровой аватар из множества цифровых аватаров 2310 является цифровым представлением уникального одного из множества физических насосов. Например, первый цифровой аватар 2311 содержит первый набор моделей насосов, которые связаны с информацией производителя, рабочими спецификациями, предыдущей эксплуатационной информацией, информацией о техническом обслуживании и другой информацией, уникальной для первого насоса, а второй цифровой аватар 2312 содержит второй набор моделей насосов, связанных с информацией производителя, рабочими характеристиками, предыдущей эксплуатационной информацией, информацией о техническом обслуживании и другой информацией, уникальной для второго насоса, и это может распространяться на любое количество цифровых аватаров, ассоциированных с любым количеством насосов. Соответственно, количество цифровых аватаров может быть равно количеству насосов, и каждый аватар может быть уникальным для определенного насоса. Модель насоса может быть основанной на законах физики, данных или быть гибридной моделью.
[00297] Множество цифровых аватаров 2310 может также содержать модели жизненного цикла, аналитические модели, модели прогнозирования и отображать время работы, а также параметры в реальном времени, такие как температура охлаждающей жидкости, давление преобразователя трансмиссии, температура преобразователя трансмиссии, нагрузка, скорость, местоположение насоса и другие параметры соответствующего насоса, а также любые другие данные, связанные с насосом.
[00298] Цифровые аватары могут автоматически обновляться в режиме реального времени для отражения текущего состояния соответствующего насоса с использованием данных датчиков, записей технического обслуживания и данных конфигурации работы по гидроразрыву. Цифровой аватар может иметь возможность оценивать качество данных датчика в режиме реального времени. Цифровые модели аватаров могут автоматически обновляться при получении данных датчиков, изменений в записях технического обслуживания или конфигурации работы.
[00299] Выходные данные цифровых аватаров могут направлять на любой контроллер, шлюз или компонент центральной обработки и могут отображаться в пользовательском интерфейсе. Выходные данные цифровых аватаров могут храниться локально или в центральном блоке управления либо вне площадки на локальных серверах или в облаке.
[00300] Цифровые аватары каждого отдельного насоса можно объединить в цифровом виде для создания цифрового аватара парка насосов. Каждый аватар насоса может обмениваться данными модели, входами и выходами для каждого из типов моделей, включая цифровой аватар, с цифровыми аватарами других насосов, которые являются частью парка. Цифровой аватар каждого парка насосов может быть создан, если эти насосы назначены парку. Данные, выводимые цифровым аватаром парка насосов, могут быть сохранены и могут продолжать существовать после того, как парк перестанет существовать.
[00301] Цифровые аватары также могут иметь модели моделирования, позволяющие оператору смоделировать работу отдельного насоса или всей системы парка насосов наперед по времени от текущего начального состояния, регулируя скорость одного или более насосов, изменяя тип проппанта, корректируя информацию об устье скважины и т.д. На основе моделей моделирования оператор может определить, следует ли вручную настраивать парк насосов для достижения другого результата разрыва пласта, скорости работы или для дальнейшей оптимизации системы. Оператор может также привносить один или более сбоев в модели моделирования, чтобы определить, как отключение одного или более насосов или возникновение других условий повлияет на весь парк насосов.
[00302] Как показано на Фиг. 23, графический пользовательский интерфейс (UI) 2330 показывает цифровой аватар для каждого из насосов в парке насосов, изображены два, но можно использовать любое количество. UI также показывает в реальном времени рабочие параметры 2321, 2322, указание оставшегося срока службы 2331, 2332 и срок выполнения технического обслуживания для каждого насоса 2341, 2342. UI также имеет графический элемент управления (например, кнопку) 2350 для выбора режима моделирования, в котором оператор может запускать моделирование предстоящей работы или текущей работы. Кнопка моделирования может быть связана с компьютерными инструкциями, которые конфигурируют процессор для связи с UI и цифровыми аватарами для запуска моделирования с использованием предварительно сохраненных моделей и определенных пользователем входных данных, требуемых выходных данных или их комбинаций. Например, моделирование может быть выполнено для предстоящей работы с запланированным развертыванием насосов, и моделирование может определить, будут ли запланированные насосы для парка достаточными для обеспечения соответствующего давления и/или скорости, будут, вероятно, работать без сбоев во время выполнения работы, и как определенный отказ повлияет на парк насосов. Соответственно, планировщик работ по гидроразрыву может определить, следует ли добавить к парку насосов дополнительные насосы или разные отдельные насосы для обеспечения оптимального выполнения работы по разрыву пласта. Планировщик работ по гидроразрыву может также запускать моделирование гидроразрыва с использованием парка насосов, связывать цифровой аватар или динамическую модель пласта-коллектора и пласта и запускать различные параметры работы, чтобы определить подходящую скорость нагнетания насоса для достижения требуемых кластеров разрыва. В моделировании могут использоваться уникальные характеристики насоса и рабочие параметры, которые сохраняются и назначаются цифровому аватару, ассоциированному с насосом. Таким образом, моделирование может учитывать и использовать характеристики каждого насоса в реальном времени с использованием цифрового аватара.
[00303] В одном или более вариантов осуществления изобретения один или более из контроллера, шлюза, компонента центральной обработки или их комбинаций могут включать алгоритм приостановки скорости, который дает команду процессору заморозить общую скорость нагнетания насоса при различных сценариях работы по разрыву пласта. Алгоритм приостановки скорости может быть выполнен с возможностью поддержания скорости на уровне измеренного значения скорости при получении команды приостановки или поддержания скорости на как можно более низком уровне без какого-либо дополнительного переключения передач.
[00304] Этот алгоритм приостановки скорости выполняет четыре основные функции. Функции включают в себя идентификацию насосов с переключением передач, автоматическое определение будущей скорости нагнетания насосов с переключением передач, автоматический выбор компенсирующих насосов и автоматическое определение будущей скорости нагнетания компенсирующего насоса.
[00305] Алгоритм приостановки нагнетания может быть настроен так, чтобы процессор выполнял действия по автоматической идентификации насосов с переключением передач.
[00306] Алгоритм приостановки нагнетания может использовать различные методы, чтобы определить, находится ли насос в середине процесса переключения передач. Например, алгоритм приостановки скорости может проинструктировать процессор: сравнить требуемую скорость со скоростью из текущего цикла сбора данных, проверить состояние блокировки насоса из текущего цикла сбора данных, проверить требуемую передачу с использованием передачи насоса из текущего цикла сбора данных или их комбинации.
[00307] Алгоритм приостановки скорости может также настроить контроллер для ведения списка предыдущих насосов с переключением передач.
[00308] Алгоритм приостановки скорости может сконфигурировать процессор для выполнения нескольких проверок, чтобы решить, завершили ли предыдущие насосы с переключением передач процесс переключения передач после получения команды приостановки скорости.
[00309] Алгоритм приостановки скорости может также сконфигурировать процессор так, чтобы он возвращал контроллеру список текущих насосов с переключением передач.
[00310] Алгоритм приостановки скорости может также сконфигурировать процессор контроллера с возможностью автоматического определения будущей скорости работы насосов с переключением передач. Для этого алгоритм приостановки скорость подает команду процессору контроллера запросить текущий статус автоматизации насосов с переключением передач и решить, какая скорость будет в будущем, на основе статуса автоматизации.
[00311] Например, алгоритм приостановки скорости конфигурирует процессор для запроса текущего состояния насосов с переключением передач, определяет будущую скорость на основе текущего состояния и выполняет одно из следующих действий: сохранение предыдущей скорости, если передача не менялась, сохранение предыдущей скорости, если передача была изменена; или невмешательство в работу насоса, если не выполняются два предыдущих условия.
[00312] Алгоритм приостановки скорости может также сконфигурировать контроллер для автоматического выбора компенсирующих насосов. Алгоритм приостановки скорости поддерживает порядок включения насосов и выбирает компенсирующие насосы в зависимости от порядка.
[00313] Алгоритм приостановки скорости также заставляет процессор контроллера исключать насосы с переключением передач из общего списка насосов, определять доступные компенсирующие насосы путем проверки компенсирующих насосов, с которыми поддерживается связь, которые в настоящее время не находятся в режиме бездействия и являются назначенными, и выбирать оставшиеся компенсирующие насосы.
[00314] Алгоритм приостановки скорости конфигурирует контроллер для определения будущей скорости выбранных компенсирующих насосов. Алгоритм приостановки скорости дает команду процессору контроллера установить оптимальную скорость компенсирующих насосов, если этого достаточно для компенсации увеличения скорости за счет насосов с переключением передач. Алгоритм приостановки скорости может установить компенсирующие насосы на минимальную скорость передачи, если оптимальная скорость не обеспечивает достаточную скорость.
[00315] Например, алгоритм приостановки скорости может дать команду процессору контроллера поочередно выполнить для насосов в ходе цикла: расчет текущей передачи на основе предыдущей целевой скорости насоса, расчет оптимальной скорости для положения заслонки, составляющую от около 1550 об/мин до около 1750 об/мин, например, оптимальная скорость может быть при изменении положения дроссельной заслонки насосов около 1650 об/мин.
[00316] Затем алгоритм приостановки скорости переводит насос в режим оптимальной скорости и завершается, если увеличение скорости можно компенсировать.
[00317] Однако, если наличие насосов с оптимальной скоростью недостаточно для компенсации увеличения скорости, алгоритм приостановки скорости может подать команду процессору контроллера перебирать насосы в ходе цикла и для каждого насоса рассчитать текущую передачу на основе предыдущей целевой скорости насоса, вычислить минимальную скорость, которая имеет место при изменении положения дроссельной заслонки от около 1350 об/мин до около 1600 об/мин, например, минимальная скорость может быть при изменении положения дроссельной заслонки до около 1550 об/мин. Алгоритм приостановки скорости может затем подать команду процессору контроллера установить насос на минимальную скорость и остановить, если увеличение скорости может быть компенсировано.
[00318] Фиг. 24 иллюстрирует пример способа 2400 направления инструкции процессору идентифицировать насосы с переключением передач. Как показано, способ 2400 может включать команду процессору, такому как процессор контроллера, определить, находится ли насос в середине процесса переключения передач в блоке 2410 определения. Способ 2400 может также включать указание процессору сравнить предварительно определенную требуемую скорость со скоростью из текущего цикла сбора данных, проверить состояние блокировки насоса из текущего цикла сбора данных и/или проверить требуемую передачу с использованием передачи насоса из текущего цикла сбора данных в блоке 2412 сравнения. Например, процессор может быть выполнен с возможностью сравнения предварительно определенной требуемой скорости насосов, которая может быть выше или ниже пределов скорости текущей передачи насоса, указывая на то, что для достижения требуемой скорости потребуется переключение передачи. В другом примере процессор может определить состояние блокировки насоса, чтобы определить, происходит ли в настоящее время переключение передач. В другом примере процессор может проверить требуемую передачу, которая может отличаться от текущей передачи, указывая на то, что планируется переключение передач.
[00319] Способ 2400 может также включать указание процессору сформировать и сохранить список предыдущих насосов с переключением передач в блоке 2414 генерации (например, хронологические данные переключений передач, таблицу состояний передач и т.д.). Например, когда оператор выбирает новую скорость, процессор планирует, как ее достичь. Для достижения новой скорости может потребоваться переключение передач некоторых насосов. Список насосов, которые будут переключать передачи, создается и сохраняется. В процессе выполнения метод приостановки скорости может получить доступ к этому списку, чтобы определить, какие насосы переключают передачи.
[00320] Способ 2400 может также включать указание процессору контроллера выполнить множественную проверку, чтобы решить, что предыдущие операции переключения передач завершили процесс переключения передач после получения команды приостановки скорости в блоке 2416 выполнения. Команду приостановки скорости можно сгенерировать, сравнив текущую передачу с требуемой. Как только текущая передача изменилась на требуемую, переключение передач считается завершенным. Способ 2400 может также включать блок 2418 генерации для составления списка насосов с переключением передач.
[00321] На Фиг. 25 проиллюстрирован пример способа 2500 указания процессору определить будущую скорость работы насосов с переключением передач. Как показано, способ 2500 может включать подачу команды процессору, такому как процессор контроллера, получить текущее состояние насосов в списке насосов с переключением передач в блоке 2510 состояния (например, получить текущий статус). Состояние насосов может включать текущую передачу, скорость и состояние блокировки, а также требуемую скорость и передачу. Как показано, способ 2500 может также включать определение будущей скорости каждого насоса на основе текущего состояния насосов в списке насосов с переключением передач в блоке 2512 определения. Например, процессору контроллера можно дать указание сохранить предыдущую скорость, если передача не изменилась, сохранить новую скорость, если передача изменилась, или не вмешиваться в работу насоса, если ничего не произошло.
[00322] Фиг. 26 иллюстрирует пример способа 2600 указания процессору контроллера выбрать компенсирующие насосы. Как показано, способ 2600 может включать указание процессору удалить насосы с переключением передач из списка компенсирующих насосов в блоке 2610 удаления. Как показано, способ 2600 может также включать исключение насосов из списка компенсирующих насосов, которые потеряли связь, находятся в состоянии мгновенного простоя или не назначены парку работы по разрыву пласта согласно блоку 2612 исключения. Как показано, способ 2600 может включать указание процессору создать обновленный список компенсирующих насосов в блоке 2614 создания.
[00323] На Фиг. 27 проиллюстрирован пример способа 2700 указания процессору определить будущую скорость работы насосов с переключением передач. Как показано, способ 2700 включает направление команды процессору выполнить цикл через обновленный список компенсирующих насосов в блоке 2710 цикла. В таком примере обновленный список закачки может быть сгенерирован, как описано выше, как в способе 2600 на Фиг. 26. На Фиг. 27 способ 2700 может также включать указание процессору вычислить текущую передачу на основе предыдущей целевой скорости для каждого насоса в вычислительном блоке 2712. Например, на основе предыдущей целевой скорости можно определить возможные передачи, которые включают в себя эту скорость. Передача, которая будет обеспечивать достижение предыдущей целевой скорости при положении дроссельной заслонки наиболее близком к оптимальному, может быть выбрана, если эта скорость достижима на нескольких передачах.
[00324] Как показано, способ 2700 может также включать указание процессору вычислить оптимальную скорость на основе технических характеристик насоса в вычислительном блоке 2714. Например, на основе технических характеристик насоса может быть определена оптимальная скорость, оптимизирующая эффективность использования топлива для обеспечиваемой мощности (например, бензин, дизельное топливо, природный газ, одно топливо, двойное топливо и т.д.).
[00325] Как показано, способ 2700 может также включать указание процессору определить оптимальную скорость для каждого насоса, и если установка каждого компенсирующего насоса на оптимальную скорость достаточна для компенсации увеличения скорости в блоке 2716 определения; отмечая, что, если установка каждого компенсирующего насоса на оптимальную скорость достаточна для компенсации увеличения скорости, способ 2700 может включать указание процессору установить компенсирующие насосы на соответствующую оптимальную скорость в соответствии с блоком 2718 установки (см., например, ветвь «да», поскольку блок 2716 может быть блоком принятия решения). Как указано, если увеличение скорости не может быть компенсировано с использованием компенсирующих насосов на оптимальной скорости, способ 2700 может включать указание процессору перебирать насосы в списке компенсирующих насосов и для каждого насоса вычислить текущую передачу для каждого насоса на основе предыдущей целевой скорости для каждого насоса в вычислительном блоке 2720 (см., например, ветвь «нет», поскольку блок 2716 может быть блоком принятия решения). Способ 2700 может также включать указание процессору вычислить минимальную скорость для предварительно определенном положении дроссельной заслонки для каждого насоса и текущую передачу в вычислительном блоке 2722, который может следовать за блоком 2720.
[00326] Как показано в примере на Фиг. 27, способ 2700 может включать определение насосов, которые должны быть установлены на минимальную скорость, чтобы компенсировать увеличение скорости в блоке 2724 определения. В таком примере, где компенсирующие насосы должны быть установлены на минимальную скорость для компенсации увеличения скорости, способ 2700 может включать указание процессору установить насосы на соответствующее предварительно определенное положение дроссельной заслонки в блоке 2726 установки (см., например, ветвь «насосы»). Например, если количество n компенсирующих насосов должно быть установлено на минимальную скорость, а остальные насосы установлены на оптимальную скорость, способ 2700 может включать указание процессору установить n компенсирующих насосов на предварительно определенное положение дроссельной заслонки и установить оставшиеся компенсирующие насосы на оптимальную скорость в блоке 2728 установки (см., например, ветвь ««n» насос(ов)»).
[00327] Фиг. 28 иллюстрирует пример системы 2800, которая содержит один или более процессоров 2810; запоминающее устройство 2820, доступное по меньшей мере одному из одного или более процессоров 2810; интерфейс 2830 данных, принимающий данные, полученные одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса; интерфейс 2840 управления, передающий сигналы управления по меньшей мере одному из одного или более насосов; компонент 2850 моделирования (см., например, блок 230 на Фиг. 2), функционально связанный по меньшей мере с одним из одного или более процессоров 2810, который прогнозирует давление в скважине с использованием модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, при этом скважина соединена по текучей среде по меньшей мере с одним из одного или более насосов; и компонент 2860 регулировки скорости нагнетания насоса (см., например, блок 236 на Фиг. 2), функционально связанный по меньшей мере с одним из одного или более процессоров 2810, который в режиме прогнозирования давления генерирует, используя прогнозируемое давление компонента моделирования и пороговое значение давления, сигнал управления скоростью нагнетания насоса для передачи через интерфейс 2840 управления.
[00328] Как показано, система 2800 на Фиг. 28 может содержать интерфейс 2830 данных, который может получать данные в реальном времени для отдельных насосов в парке насосов в ходе выполнения операции по гидроразрыву пласта; интерфейс 2840 управления, который может передавать сигналы управления для управления каждым из отдельных насосов в парке насосов в ходе выполнения гидроразрыва пласта; компонент 2870 производительности, функционально связанный по меньшей мере с одним из одного или более процессоров 2810, который оценивает в реальном времени производительность каждого из отдельных насосов в парке насосов, используя по меньшей мере часть данных в реальном времени, если расчетная производительность насосов в режиме реального времени для парка насосов, рассчитанная с использованием оценок, меньше максимальной предварительно определенной производительности насосов для парка насосов из-за ухудшения работы по меньшей мере одного из отдельных насосов; и компонент 2880 управления, функционально связанный по меньшей мере с одним из одного или более процессоров 2810, который для целевого значения скорости нагнетания насосов парка насосов в ходе выполнения операции гидроразрыва пласта генерирует по меньшей мере одну из настроек дроссельной заслонки двигателя и коробки передач для каждого из отдельных насосов, используя расчетную производительность в реальном времени для каждого из отдельных насосов, причем настройки могут передаваться через интерфейс 2840 управления в виде одного или более сигналов управления.
[00329] Например, система 2800 может содержать блоки 2810, 2820, 2830, 2840, 2850 и 2860 и, необязательно, блоки 2870 и 2880. Например, система 2800 может содержать блоки 2810, 2820, 2830, 2840, 2870 и 2880 и, необязательно, блоки 2850 и 2860.
[00330] На Фиг. 28 пример способа 2882 включает блок 2883 приема для приема данных, полученных одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса; блок 2884 прогнозирования для прогнозирования давления в скважине с использованием модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, причем скважина соединена по текучей среде с одним или более насосов; блок 2885 генерирования для генерирования в режиме прогнозируемого давления сигнала управления скоростью нагнетания насоса с использованием прогнозируемого давления и порогового значения давления; и блок 2886 передачи для передачи сигнала управления скоростью нагнетания насоса через интерфейс управления для управления работой по меньшей мере одного из одного или более насосов.
[00331] На Фиг. 28 пример способа 2892 включает в себя блок 2893 приема для приема данных в реальном времени для отдельных насосов в парке насосов в ходе операции гидроразрыва пласта; блок 2894 оценки для оценки в реальном времени производительности каждого из отдельных насосов в парке насосов, используя по меньшей мере часть данных в реальном времени, если расчетная производительность насосов в режиме реального времени для парка насосов, рассчитанная с использованием оценок, меньше максимальной предварительно определенной производительности насосов для парка насосов из-за ухудшения работы по меньшей мере одного из отдельных насосов; блок 2895 генерирования для генерирования для целевого значения скорости нагнетания насосов парка насосов в ходе выполнения операции гидроразрыва пласта по меньшей мере одной из настроек дроссельной заслонки двигателя и коробки передач для каждого из отдельных насосов, используя расчетную производительность в реальном времени для каждого из отдельных насосов; и блок 2896 передачи для передачи настроек через интерфейс управления в виде одного или более сигналов управления, которые управляют каждым из отдельных насосов в парке насосов в ходе выполнения операции гидроразрыва пласта.
[00332] Например, система 2800 может использоваться по меньшей мере частично для выполнения одного или более методов, таких как, например, один или более методов, описанных со ссылкой на Фиг. 1-28.
[00333] Например, система 2800 может обеспечивать оптимизацию с учетом данных пласта-коллектора, которая может включать оптимизацию эффективности добычи (например, с течением времени) и, например, одну или более затрат на бурение, заканчивание/осуществление гидроразрыва, а также минимизацию риска инцидентов при гидроразрыве, выпадения расклинивающего агента из жидкости для гидроразрыва и другие потери (например, потеря жидкости и т.д.), оптимизацию использования оборудования (например, эффективность, техническое обслуживание, работоспособность и т.д.) и т.д.
[00334] Например, система управления парком насосов может содержать по меньшей мере один процессор; и набор компьютерных инструкций, при выполнении которых после приема сигнала процессор поддерживает скорость нагнетания на как можно более низком уровне и которые конфигурируют процессор, чтобы: определения насосов с переключением передач; автоматического определения будущей скорости насосов с переключением передач; автоматического выбора компенсирующих насосов; и установки будущей скорости каждого компенсирующего насоса.
[00335] Например, компьютерные инструкции могут настроить процессор на установку будущей скорости каждого компенсирующего насоса, указав процессору: перебирать обновленный список компенсирующих насосов в ходе цикла; рассчитать текущую передачу на основе предыдущей целевой скорости для каждого компенсирующего насоса; рассчитать оптимальную скорость для каждого компенсирующего насоса на основе технических характеристик компенсирующих насосов; определить оптимальную скорость для каждого компенсирующего насоса и определить, достаточна ли настройка каждого компенсирующего насоса на оптимальную скорость для поддержания скорости нагнетания насоса на минимально возможном низком уровне путем компенсации определенного увеличения скорости для насосов при переключении передач; и, если да, то установить компенсирующие насосы на оптимальную скорость; тогда как, если нет, то побудить процессор: перебирать список компенсирующих насосов и для каждого насоса вычислить текущую передачу для каждого насоса на основе предыдущей целевой скорости для каждого насоса; рассчитать минимальную скорость для предварительно определенного положения дроссельной заслонки для каждого насоса и текущей передачи; и определить компенсирующие насосы, которые должны быть установлены на минимальную скорость для компенсации увеличения скорости, и если это касается каждого из компенсирующих насосов, то установить компенсирующие насосы на минимальную скорость; и, если это касается части компенсирующих насосов, установить для этой части минимальную скорость, а оставшуюся часть компенсирующих насосов установить на оптимальную скорость.
[00336] Например, способ управления скоростью потока парка насосов может включать использование одного или более процессоров, поддерживающих связь по меньшей мере с одной памятью, имеющей предварительно установленную требуемую скорость нагнетания парка насосов; передачу информации почти в реальном времени одному или нескольким процессорам; при этом один или более процессоров определяют работоспособность каждого насоса в парке насосов с помощью одного или более процессоров с использованием модели PRP, модели PHM или обеих, хранящихся в памяти и находящихся на связи с одним или более процессоров; получение оценки состояния работоспособности на основе модели PRP, PHM или обеих; один или более процессоров, определяющих по оценке работоспособности, насосы, которые должны быть выведены из эксплуатации или иметь пониженную скорость нагнетания насоса; один или более процессоров, определяющих по оценке работоспособности и рабочим характеристикам каждого насоса насосы, которые имеют требуемую скорость нагнетания; один или более процессоров, определяющих сокращение парка насосов из-за того, что насосы выводятся из эксплуатации или имеют пониженную скорость нагнетания, и определяющих величину увеличения потребности в скорости нагнетания насоса от насосов, которые имеют требуемую скорость нагнетания насоса; один или более процессоров, выдающих команды, чтобы предпринять соответствующие действия с идентифицированными насосами для поддержания требуемой скорости нагнетания парка насосов. Например, различные действия могут выполняться с использованием процессора контроллера, например, для выполнения определения и выдачи. В таком примере процессор шлюза может выполнять определение, а процессор контроллера может выполнять выдачу.
[00337] Например, система может содержать процессор контроллера, процессор шлюза и по меньшей мере один облачный процессор, при этом процессоры взаимодействуют друг с другом и процессор шлюза предоставляет структурированные данные и команды процессору контроллера и по меньшей мере одному облачному процессору и причем по меньшей мере один облачный процессор выполняет определение, а процессор контроллера - выдачу.
[00338] Например, система управления парком насосов может содержать по меньшей мере один процессор; множество насосов и множество датчиков, при этом датчики связаны со множеством насосов для сбора данных о работе каждого из множества насосов, и при этом датчики связаны по меньшей мере с одним процессором; по меньшей мере одну память, связанную по меньшей мере с одним процессором, при этом по меньшей мере одна память содержит: модель PRP, модель PHM или обе; компьютерные инструкции для указания по меньшей мере одному процессору предоставить полученные данные модели PRP, модели PHM или обеим и определить оценку работоспособности для каждого из множества насосов; компьютерные инструкции для определения насосов, которые должны быть отключены или иметь пониженную скорость нагнетания насоса на основе оценки работоспособности; компьютерные инструкции для определения насосов, которые имеют требуемую скорость нагнетания насоса, на основе оценки работоспособности и рабочих параметров для каждого из множества насосов; компьютерные инструкции для определения скорости нагнетания парка насосов после того, как идентифицированные насосы будут отключены или переведены в режим пониженной скорости, насосов, которые будут переведены в режим повышенной скорости нагнетания насоса, на основе определения доступной скорости нагнетания насоса, компьютерные инструкции для выдачи команд для принятия соответствующих действий в отношении идентифицированных насосов для поддержания требуемой скорости нагнетания парка насосов.
[00339] Например, система управления парком насосов может содержать множество цифровых аватаров, связанных с насосами парка насосов, причем каждый цифровой аватар может быть специализированным и ассоциированным с конкретным одним из насосов парка насосов.
[00340] Например, система может содержать пользовательский интерфейс, который отображает индикацию оставшегося срока службы для каждого насоса из парка насосов посредством использования одного или более цифровых аватаров. В таком примере система может содержать инструкции, связанные с кнопкой моделирования на пользовательском интерфейсе, которая позволяет пользователю запускать моделирование предстоящей или текущей работы, регулируя требуемые скорости каждого насоса в парке насосов. Например, система может содержать первый цифровой аватар, ассоциированный с первым насосом, и второй цифровой аватар, ассоциированный со вторым насосом, причем первый цифровой аватар содержит информацию, относящуюся к первому насосу, а второй цифровой аватар отличается, поскольку он содержит информацию, относящуюся ко второму насосу.
[00341] Например, система управления парком насосов может содержать по меньшей мере один процессор; и набор компьютерных инструкций, при выполнении которых после приема сигнала процессор поддерживает скорость на как можно более низком уровне и которые конфигурируют процессор для: определения насосов с переключением передач; автоматического определения будущей скорости насосов с переключением передач; автоматического выбора компенсирующих насосов; и установки будущей скорости каждого компенсирующего насоса. В таком примере могут быть включены инструкции для установки будущей скорости нагнетания каждого компенсирующего насоса путем указания процессору: перебирать обновленный список компенсирующих насосов в ходе цикла; рассчитать текущую передачу на основе предыдущей целевой скорости для каждого компенсирующего насоса; рассчитать оптимальную скорость для каждого компенсирующего насоса на основе технических характеристик компенсирующих насосов; определить оптимальную скорость для каждого компенсирующего насоса и определить, достаточна ли настройка каждого компенсирующего насоса на оптимальную скорость для поддержания скорости нагнетания насоса на минимально возможном низком уровне путем компенсации определенного увеличения скорости для насосов при переключении передач; и, если да, то установить компенсирующие насосы на оптимальную скорость; тогда как, если нет, то побудить процессор: перебирать список компенсирующих насосов и для каждого насоса вычислить текущую передачу для каждого насоса на основе предыдущей целевой скорости для каждого насоса; рассчитать минимальную скорость для предварительно определенного положения дроссельной заслонки для каждого насоса и текущей передачи; и определить компенсирующие насосы, которые должны быть установлены на минимальную скорость, чтобы компенсировать увеличение скорости, и если это весь парк компенсирующих насосов, то установить эти компенсирующие насосы на минимальную скорость; и, если это часть компенсирующих насосов, то установить эту часть на минимальную скорость и установить оставшуюся часть компенсирующих насосов на оптимальную скорость.
[00342] Например, способ управления скоростью потока парка насосов может включать использование одного или более процессоров, поддерживающих связь по меньшей мере с одной памятью, имеющей предварительно установленную требуемую скорость нагнетания парка насосов, и передачу информации почти в реальном времени одному или нескольким процессорам. Затем один или более процессоров могут обеспечивать определение работоспособности каждого насоса с использованием модели PRP и модели PHM в памяти и во взаимодействии с одним или более процессоров. Оценка работоспособности может быть получена по меньшей мере из одной из моделей: PRP или PHM, и один или более процессоров могут включать определение на основе оценки работоспособности насосов, которые должны быть выведены из эксплуатации или иметь пониженную скорость нагнетания.
[00343] Например, система может содержать один или более процессоров; запоминающее устройство, доступное по меньшей мере одному из одного или более процессоров; интерфейс данных, принимающий данные, полученные одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса; интерфейс управления, передающий сигналы управления по меньшей мере одному из одного или более насосов; компонент моделирования, функционально связанный по меньшей мере с одним из одного или более процессоров, который прогнозирует давление в скважине с использованием модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, при этом скважина соединена по текучей среде по меньшей мере с одним из одного или более насосов; и компонент регулировки скорости нагнетания насоса, функционально связанный по меньшей мере с одним из одного или более процессоров, который в режиме прогнозирования давления генерирует, используя прогнозируемое давление компонента моделирования и пороговое значение давления, сигнал управления скоростью нагнетания насоса для передачи через интерфейс управления. В таком примере по меньшей мере часть данных, указывающих на фактическую скорость нагнетания насоса, содержит данные, полученные датчиком скорости нагнетания насоса.
[00344] Например, система может содержать компонент оценки давления на устье скважины, функционально связанный по меньшей мере с одним процессором, который принимает через интерфейс данных данные, полученные преобразователем давления на нагнетании насоса, для генерации оценки давления на устье скважины. В таком примере компонент фильтрации данных, функционально связанный по меньшей мере с одним процессором, может фильтровать данные, полученные преобразователем давления на нагнетании насоса, для генерации отфильтрованных данных, когда компонент оценки давления на устье скважины принимает отфильтрованные данные. Что касается фильтрации данных, она может включать в себя различные операции, которые могут включать удаление аномальных значений, исключение частичных данных, исключение данных за пределами одного или более временных и/или других ограничений и т.д.
[00345] Например, система может содержать интерфейс, который принимает данные о давлении обработки в зависимости от скорости нагнетания насоса, при этом компонент регулировки скорости нагнетания насоса в альтернативном режиме (например, альтернативном режиму прогнозируемого давления) генерирует сигнал управления скоростью нагнетания насоса с использованием данных о зависимости давления обработки от скорости нагнетания насоса без использования прогнозируемого давления (например, прогнозируемого режима давления).
[00346] Например, система может включать интерфейс, который принимает обновленную модель, которая является обновлением модели компонента регулировки скорости нагнетания насоса. В таком примере компонент обновления модели может получать один или более входов в компонент моделирования, который принимает сигнал управления скоростью нагнетания насоса, который использует один или более входов в компонент моделирования и сигнал управления скоростью нагнетания насоса для определения точности сигнала управления скоростью нагнетания насоса, и который обновляет модель, по меньшей мере частично, на основе определенной точности.
[00347] Например, компонент моделирования может содержать модель потери давления на трение, которая прогнозирует потерю давления на трение, которое является функцией скорости нагнетания насоса и свойства трения жидкости. Например, рассмотрим систему, которая содержит компонент обновления модели потери давления на трение, который получает данные давления закачки и который обновляет модель потери давления на трение, используя по меньшей мере часть данных давления закачки. В таком примере данные давления закачки могут содержать данные давления от операции закачки перфорационного блока в подземный трубчатый элемент (например, ствол скважины и т.д.). Например, модель потери давления на трение может использовать одно или более мгновенных давлений при выключении насоса (ISIP) и одно или более давлений перед остановкой для одной или более стадий гидроразрыва пласта для определения одного или более потерь давления на трение. В таком примере система может использовать одну или более потерь давления на трение для корректировки кривой потери давления на трение и использовать скорректированную кривую потери давления на трение для оценки потери давления на трение для последующей стадии гидроразрыва пласта. В таком примере система может использовать скорректированную кривую потери давления на трение для оценки забойного давления. Например, система может содержать компонент, который анализирует расчетное забойное давление для определения одного или более отклонений от нормы обработки и признаков выпадения расклинивающего агента из жидкости для гидроразрыва. В таком примере система может содержать компонент, который использует признаки выпадения расклинивающего агента из жидкости для гидроразрыва для генерации сигнала управления скоростью нагнетания насоса для генерации сигнала управления скоростью нагнетания насоса для передачи через интерфейс управления для изменения скорости нагнетания насоса.
[00348] Например, система может содержать компонент скорости изменения давления, функционально связанный по меньшей мере с одним процессором, который генерирует скорость изменения давления с использованием оценки давления на устье скважины и хронологических данных давления и выводит скорость изменения давления в компонент моделирования, при этом компонент моделирования генерирует прогнозируемое давление, используя скорость изменения давления.
[00349] Например, система может содержать кластерный компонент, который генерирует оценки охвата трещинами, которые зависят от одного или более рабочих параметров. В таком примере сигнал управления скоростью нагнетания насоса, генерируемый компонентом регулировки скорости нагнетания насоса, может быть реализован способом, зависящим от одной или более оценок охвата трещинами. Например, кластерный компонент может генерировать оценки охвата трещинами, которые зависят от данных теста ступенчатого расхода. Такой подход может включать использование оборудования для теста ступенчатого расхода для выполнения теста ступенчатого расхода или с целью сбора данных в ходе теста ступенчатого расхода.
[00350] Например, система может содержать кластерный компонент, который анализирует давление и скорость потока для оценки по меньшей мере одного из доминирующей перфорации и доминирующей извилистости операции разрыва пласта. В таком примере компонент кластера может использовать данные теста ступенчатого расхода.
[00351] Например, система может содержать кластерный компонент, который оценивает охват трещинами как оценки, основанные на доставке жидкости через перфорационные отверстия на стадии многоэтапной операции гидроразрыва пласта. Такой компонент может включать в себя элементы и функции одной или более вычислительных инфраструктур.
[00352] Например, компонент регулировки скорости нагнетания насоса может генерировать сигнал управления скоростью нагнетания насоса для оптимизации охвата трещинами.
[00353] Например, способ может включать прием данных, полученных одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса; прогнозирование давления в скважине с использованием модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, причем скважина соединена по текучей среде с одним или более насосов; генерирование в режиме прогнозируемого давления сигнала управления скоростью нагнетания насоса с использованием прогнозируемого давления и порогового значения давления; и передачу сигнала управления скоростью нагнетания насоса через интерфейс управления для управления работой по меньшей мере одного из одного или более насосов. Например, такой способ может включать работу в альтернативном режиме, при котором генерирование генерирует сигнал управления скоростью нагнетания насоса с использованием данных о давлении обработки в зависимости от скорости нагнетания насоса без использования прогнозируемого давления. Например, способ может включать переключение режима, которое может происходить посредством ввода из графического пользовательского интерфейса, через один или более сигналов, посредством анализа данных и т.д. Например, способ может включать определение режима и реализацию определенного режима для управления скоростью нагнетания насоса.
[00354] Например, способ может включать формирование сигнала управления скоростью нагнетания насоса путем использования модели потери давления на трение, которая прогнозирует потерю давления на трение, что является функцией скорости нагнетания насоса и свойств трения жидкости. В таком примере модель потери давления на трение может, например, зависеть от данных о давлении откачки от операции, которая закачивает перфорационный блок в подземный трубопровод, и/или зависеть от одного или более мгновенных давлений при выключении насоса (ISIP) и одно или более давлений перед остановкой для одной или более стадий гидроразрыва пласта (см., например, график 1000 на Фиг. 10, график 1230 на Фиг. 12 и т.д.).
[00355] Например, способ может включать использование кривой потери давления на трение для оценки забойного давления и, если забойное давление указывает на выпадения расклинивающего агента из жидкости для гидроразрыва (например, повышенный риск, высокая вероятность и т.д.), генерирование скорректированного сигнала управления скоростью нагнетания насоса для снижения риска выпадения расклинивающего агента из жидкости для гидроразрыва и передачу скорректированного сигнала управления скоростью нагнетания насоса через интерфейс управления для управления работой по меньшей мере одного из одного или более насосов.
[00356] Например, способ может включать создание оценок охвата трещинами, которые зависят от одного или более рабочих параметров, при этом формирование сигнала управления скоростью нагнетания зависит от одной или более оценок охвата трещинами. Например, одно или более моделирований, одно или более понижающих испытаний и т.д. могут быть выполнены для генерации одной или более оценок охвата трещинами (см., например, Фиг. 7, 8, 14 и т.д.).
[00357] Например, система может содержать один или более процессоров; запоминающее устройство, доступное по меньшей мере одному из одного или более процессоров; интерфейс данных, получающий в реальном времени данные для отдельных насосов в парке насосов в ходе операции гидроразрыва пласта; интерфейс управления, передающий сигналы управления для управления каждым из отдельных насосов в парке насосов в ходе операции гидроразрыва пласта; компонент производительности, функционально связанный по меньшей мере с одним из одного или более процессоров, который оценивает в реальном времени производительность каждого из отдельных насосов в парке насосов, используя по меньшей мере часть данных в реальном времени, если расчетная производительность насосов в режиме реального времени для парка насосов, рассчитанная с использованием оценок, меньше максимальной заданной производительности насосов для парка насосов из-за ухудшения работы по меньшей мере одного из отдельных насосов; и компонент управления, функционально связанный по меньшей мере с одним из одного или более процессоров, который для целевого значения скорости нагнетания насосов парка насосов в ходе операции гидроразрыва пласта генерирует по меньшей мере одну из настроек дроссельной заслонки двигателя и коробки передач для каждого из отдельных насосов, используя расчетную производительность в реальном времени для каждого из отдельных насосов, причем настройки могут передаваться через интерфейс управления в виде одного или более сигналов управления. В таком примере компонент управления может содержать по меньшей мере одну модель давления, которая генерирует прогнозируемое давление, при этом целевая скорость нагнетания насоса зависит по меньшей мере частично от прогнозируемого давления.
[00358] Например, компонент производительности может содержать по меньшей мере одну модель работоспособности, которая моделирует работоспособность по меньшей мере одного из отдельных насосов. Например, компонент производительности может содержать по меньшей мере одну модель профиля рисков насоса, которая моделирует риск отказа по меньшей мере одного из множества отдельных насосов.
[00359] Например, данные, полученные через интерфейс данных, могут содержать данные блока управления двигателем (ECU) от отдельных ECU соответствующих отдельных насосов и/или могут включать данные блока управления трансмиссией (TCU) от отдельных TCU соответствующих отдельных насосов.
[00360] Например, компонент управления может создавать настройку отключения для одного из множества отдельных насосов. Например, настройка отключения может быть создана в ответ на указание компонента производительности о том, что один из отдельных насосов подвержен повышенному риску отказа по сравнению с другими отдельными насосами. В таком примере компонент управления может создавать по меньшей мере одну из настроек дроссельной заслонки двигателя и трансмиссии для каждого из оставшихся отдельных насосов, чтобы компенсировать настройку отключения одного из отдельных насосов.
[00361] Например, компонент управления может создавать множество настроек для отдельных скоростей нагнетания насоса по графику, зависящему от времени, для достижения целевой скорости нагнетания насоса для парка насосов в ходе выполнения операции гидроразрыва пласта. В таком примере множество настроек может требовать первого нарастания первого из отдельных насосов до первой определенной скорости нагнетания насоса и второго нарастания второго из отдельных насосов до второй определенной скорости нагнетания насоса и/или первая определенная скорость нагнетания насоса и вторая определенная скорость нагнетания насоса могут быть одинаковыми или могут быть разными (например, первая определенная скорость нагнетания насоса и вторая определенная скорость нагнетания насоса могут отличаться), и/или первое и второе нарастание могут отличаться по меньшей мере одной из настроек дроссельной заслонки двигателя и трансмиссии относительно времени.
[00362] Например, компонент управления может создавать графики настроек трансмиссии для каждого из множества отдельных насосов, где первый из графиков для первого одного из отдельных насосов отличается от второго графика для второго из отдельных насосов. В таком примере сигналы управления могут содержать сигналы управления переключения передач, которые зависят от фактических данных о частоте оборотов двигателя, при этом, например, фактические данные о частоте оборотов двигателя принимаются в реальном времени через интерфейс данных.
[00363] Например, система может содержать компонент маркировки тегами, который маркирует данные в реальном времени для надлежащей связи с каждым из множества отдельных насосов. В таком примере система может содержать оценку работоспособности для каждого из отдельных насосов, которая вычисляется с использованием вычислительных ресурсов с использованием по меньшей мере части маркированных данных. В таком примере компонент производительности может использовать оценки работоспособности для оценки производительности в реальном времени для каждого из отдельных насосов в парке насосов.
[00364] Например, система может обеспечивать обновление профиля рисков насоса для каждого отдельного насоса в парке насосов, используя по меньшей мере часть маркированных данных.
[00365] Например, система может содержать вычислительный компонент, который вычисляет оценку работоспособности для каждого отдельного насоса в парке насосов с использованием по меньшей мере части маркированных данных. В таком примере компонент производительности может использовать оценки работоспособности для оценки производительности в реальном времени для каждого из отдельных насосов в указанном парке насосов.
[00366] Например, система может содержать компонент обновления, который обновляет профиль рисков насоса для каждого отдельного насоса в парке насосов, используя по меньшей мере часть маркированных данных, при этом, например, компонент производительности использует обновленные профили рисков насоса для оценки производительность в реальном времени для каждого из отдельных насосов в указанном парке насосов.
[00367] Например, производительность насоса в реальном времени может быть указана как гидравлическая мощность в лошадиных силах (HHP). Например, производительность насоса в реальном времени может зависеть от выходной мощности в реальном времени соответствующего насосного дизельного двигателя, функционально связанного с трансмиссией, при этом трансмиссия функционально связана с насосным агрегатом.
[00368] Например, система может содержать компонент эффективности, функционально связанный по меньшей мере с одним процессором, который оценивает эффективность по меньшей мере одного компонента каждого отдельного насоса в парке насосов. Например, можно рассмотреть эффективность дизельного двигателя (например, КПД дизельного двигателя) при использовании дизельного топлива. Например, двигатель может быть одно- или двухтопливным (например, двигатель на природном газе и дизеле и т.д.). Например, компонент управления может создавать по меньшей мере одну из настроек дроссельной заслонки двигателя и трансмиссии, используя по меньшей мере один из оцененных КПД. Например, можно рассмотреть каждый из множества отдельных насосов как содержащий дизельный двигатель, где настройки включают в себя настройки трансмиссии, которые оптимизируют использование дизельного топлива дизельными двигателями.
[00369] Например, система может содержать компонент цифрового аватара, который содержит по меньшей мере одно цифровое представление по меньшей мере одного отдельного насоса в парке насосов. В таком примере компонент цифрового аватара может моделировать поведение отдельных насосов в парке насосов с использованием компонента цифрового аватара до передачи сигналов управления отдельным насосам в парке насосов. В таком примере, если результаты моделирования компонента цифрового аватара показывают, что целевая скорость нагнетания насоса не достигается, компонент управления может повторно сгенерировать настройки и обновить по меньшей мере одну из модели PHM и модели профиля риска насоса (PRP), чтобы учитывать сигналы управления, которые увеличивают нагрузку, по меньшей мере, на один из отдельных насосов.
[00370] Например, компонент или компоненты цифрового аватара могут моделировать эффективность одного или более отдельных насосов в парке насосов и действовать для оптимизации эффективности путем оптимизации по меньшей мере одного из положения дроссельной заслонки двигателя и передачи трансмиссии для одного или более отдельных насосов в парке насосов.
[00371] Например, способ может включать получение данных в реальном времени для отдельных насосов в парке насосов в ходе выполнения операции гидроразрыва пласта; оценку в реальном времени производительности каждого из отдельных насосов в парке насосов, используя по меньшей мере часть данных в реальном времени, если расчетная производительность насосов в режиме реального времени для парка насосов, рассчитанная с использованием оценок, меньше максимальной заданной производительности насосов для парка насосов из-за ухудшения работы по меньшей мере одного из отдельных насосов; генерирования для целевого значения скорости нагнетания насосов парка насосов в ходе операции гидроразрыва пласта по меньшей мере одной из настроек дроссельной заслонки двигателя и коробки передач для каждого из отдельных насосов, используя расчетную производительность в реальном времени для каждого из отдельных насосов; и передачу настроек через интерфейс управления в виде одного или более сигналов управления, которые управляют каждым из отдельных насосов в парке насосов в ходе операции гидроразрыва пласта. В таком примере способ может включать создание в режиме прогнозируемого давления целевой скорости нагнетания насоса с использованием прогнозируемого давления по меньшей мере из одной модели давления; или создание в альтернативном режиме целевой скорости нагнетания насоса с использованием данных о давлении обработки в зависимости от скорости нагнетания насоса без использования прогнозируемого давления.
[00372] Например, способ может включать оценку скорости нагнетания насоса в реальном времени таким образом, чтобы использовать по меньшей мере одну модель работоспособности, которая моделирует состояние по меньшей мере одного отдельного насоса в парке, и/или по меньшей мере одну модель профиля рисков насоса, которая моделирует риск отказа хотя бы одного отдельного насоса в парке.
[00373] Например, способ может включать в себя создание настройки отключения для одного отдельного насоса в парке отдельных насосов, при этом настройка отключения создается в ответ на указание того, что один из отдельных насосов подвержен повышенному риску отказа, и причем такой способ может включать создание по меньшей мере одной из настроек дроссельной заслонки двигателя и трансмиссии для каждого из оставшихся отдельных насосов, чтобы компенсировать настройку отключения одного из отдельных насосов.
[00374] Например, способ может включать создание множества настроек для отдельных скоростей нагнетания зависящего от времени графика для достижения целевой скорости нагнетания для парка насосов в ходе выполнения операции гидроразрыва пласта, где множество настроек требует первого нарастания одного из первых отдельных насосов до первой определенной скорости нагнетания насоса и второго нарастания второго из отдельных насосов до второй определенной скорости нагнетания насоса.
[00375] Например, способ может включать создание графиков настроек трансмиссии для каждого отдельного насоса в парке отдельных насосов, например, где первый из графиков для первого из отдельных насосов отличается от второго графика для второго из отдельных насосов. В таком примере графики могут зависеть от условий, целевой скорости, изменений целевой скорости и т.д. Что касается условий, можно рассмотреть текущую передачу, эффективность (например, в отношении одного или более видов топлива, способность генерировать HHP из BHP и т.д.), условия жидкости (например, поверхностно-активное вещество, проппант и т.д.), обратную связь от микросейсмического мониторинга (например, в отношении роста трещины, степени роста трещины, расстояния от соседней скважины, расстояния от объекта, такого как разлом и т.д.). Например, график может быть динамическим в том смысле, что его можно изменять в реальном времени в зависимости от условий, требуемых характеристик трещин и т.д. Такой график может быть определен, например, для учета условий и/или изменен в них, при этом один или более насосов из парка насосов работают иначе, чем один или более других насосов из парка насосов. Например, система, такая как система 2800 на Фиг. 28, может использоваться для генерации и/или управления динамическим графиком. Например, динамический график может содержать информацию о техническом обслуживании одного или более насосов в парке насосов, может быть составлен, по меньшей мере частично, во время и/или в ответ на выполнение одной или более операций гидроразрыва пласта с использованием указанного одного или более насосов. Например, можно рассмотреть случай, когда один из насосов приводится в действие, чтобы компенсировать работу другого насоса, который отключился из-за риска отказа. График технического обслуживания для одного или обоих насосов может зависеть от такого управления, при котором, например, график технического обслуживания может выводиться во время и/или после выполнения одной или более операций гидроразрыва пласта. Например, система может работать таким образом, чтобы минимизировать потребность в немедленном послеоперационном обслуживании, которое может осуществляться таким образом, чтобы учитывать несколько этапов многоэтапной работы по гидроразрыву пласта. Например, если этап не является последним, система может быть нацелена на минимизацию потребности в немедленном послеоперационном обслуживании, чтобы оптимизировать время для завершения указанной работы (например, сокращение времени простоя (NPT)). Как объяснено ранее, компонент производительности может обеспечивать отслеживание производительности парка насосов (например, HHP и т.д.), при этом система может использовать производительность последней стадии многоэтапной работы по гидроразрыву пласта для управления использованием парка насосов для предшествующих стадий указанной работы. В таком примере система может быть нацелена на сокращение NPT, оптимизацию незавершенных стадий указанной работы и т.д. таким образом, чтобы гарантировать, что производительность доступна для заключительной стадии работы, при этом система может также оптимизировать работу насосов парка на завершающей стадии работы. Например, способ может включать получение оценки потребности в производительности для выполнения заключительной стадии многоэтапной работы по гидроразрыву пласта и использование оценки при управлении работой насосов парка насосов, которые будут использоваться для выполнения многоэтапной работы по гидроразрыву пласта. Такой способ может включать сохранение производительности парка насосов для выполнения заключительной стадии, например, путем управления насосами на предыдущих стадиях для управления работоспособностью, риском отказа и т.д., что может включать работу одного или более насосов в соответствии с выводом одной или более моделей (например, PRP, PHM и т.д.). В таком примере способ может быть нацелен на оптимизацию всей работы способом, который может иметь некоторые компромиссы на одном или более отдельных стадий, при этом такая оптимизация может быть нацелена на снижение NPT из-за отказа одного или более насосов (например, в отношении производительности и т.д.).
[00376] На Фиг. 29 показаны компоненты примера вычислительной системы 2900 и примера сетевой системы 2910. Например, система 2800 на Фиг. 28 может содержать одну или более функций системы 2900 и/или сетевой системы 2910. Система 2900 содержит один или более процессоров 2902, компонентов 2904 памяти и/или запоминающих устройств, одно или более устройств 2906 ввода и/или вывода и шину 2908. В примере варианта осуществления изобретения инструкции могут храниться на одном или более машиночитаемых носителей (например, в компонентах 2904 памяти/запоминающих устройств). Такие инструкции могут быть прочитаны одним или более процессоров (например, процессором(ами) 2902) через коммуникационную шину (например, шину 2908), которая может быть проводной или беспроводной. Один или более процессоров могут выполнять такие инструкции для реализации (полностью или частично) одного или более атрибутов (например, как часть метода). Пользователь может просматривать вывод и взаимодействовать с процессом через устройство ввода-вывода (например, устройство 2906). В примере варианта осуществления изобретения машиночитаемый носитель может быть запоминающим устройством, таким как физическое запоминающее устройство, например чип, чип на корпусе, карта памяти и т.д. (например, машиночитаемый носитель данных).
[00377] В примере варианта осуществления изобретения компоненты могут быть распределены, например, в сетевой системе 2910. Сетевая система 2910 содержит компоненты 2922-1, 2922-2, 2922-3, ... 2922-N. Например, компоненты 2922-1 могут содержать процессор(ы) 2902, тогда как компонент(ы) 2922-3 может(гут) содержать память, доступную для процессора(ов) 2902. Кроме того, компонент(ы) 2902-2 может(гут) содержать устройство ввода-вывода для отображения и, необязательно, взаимодействия с методом. Сеть может быть или включать в себя Интернет, интранет, сотовую сеть, спутниковую сеть и т.д.
[00378] Например, устройство может быть мобильным устройством, которое содержит один или более сетевых интерфейсов для передачи информации. Например, мобильное устройство может содержать интерфейс беспроводной сети (например, работающий через IEEE 802.11, ETSI GSM, BLUETOOTH, спутник и т.д.). Например, мобильное устройство может содержать такие компоненты, как основной процессор, память, дисплей, графические схемы дисплея (например, необязательно включающие схемы касания и жестов), слот для SIM-карты, аудио/видеосхемы, схемы обработки движения (например, акселерометр, гироскоп), схему беспроводной локальной сети, схему смарт-карты, схему передатчика, схему GPS и аккумулятор. Например, мобильное устройство может быть сконфигурировано как сотовый телефон, планшет и т.д. Например, способ может быть реализован (например, полностью или частично) с использованием мобильного устройства. Например, система может включать в себя одно или более мобильных устройств.
[00379] Например, система может быть распределенной средой, например, так называемой «облачной» средой, в которой различные устройства, компоненты и т.д. взаимодействуют в целях хранения данных, связи, вычислений и т.д. Например, устройство или система может содержать один или более компонентов для передачи информации через одну или более сетей: Интернет (например, когда связь происходит через один или более Интернет-протоколов), сотовая сеть, спутниковая сеть и т.д. Например, метод может быть реализован в распределенной среде (например, полностью или частично в качестве облачного сервиса). Например, инфраструктура может быть реализована, по меньшей мере частично, в облачной среде.
[00380] Например, мобильное устройство может быть сконфигурировано с браузером или другим приложением (например, мобильным приложением и т.д.), которое может оперативно подключаться к облачным ресурсам и, например, необязательно к локальным ресурсам (например, оборудованию на буровой площадке, площадке установок геофизического исследования скважин и т.д.). Например, система может включать в себя выполнение вычислений локально и/или удаленно, при этом предоставление журнала или журналов может происходить локально и/или удаленно. Удаленное предоставление может осуществляться на мобильном устройстве, при этом, например, пользователь может видеть, необязательно в реальном времени, значения зрелости пласта или пластов, которые могут быть получены на основе индукционных измерений, полученных в одной или более скважин и обработанных системой.
[00381] Например, информацию можно вводить с дисплея (например, можно рассмотреть сенсорный экран), выводить на дисплей или и то, и другое. Например, информация может выводиться на проектор, лазерное устройство, принтер и т.д., так что информацию можно просмотреть. Например, информация может выводиться стереографически или голографически. Что касается принтера, можно рассмотреть 2D- или 3D-принтер. Например, 3D-принтер может содержать одно или более веществ, которые можно выводить для создания 3D-объекта. Например, данные могут быть предоставлены на 3D-принтер для построения 3D-представления подземного пласта. Например, слои могут быть построены в 3D (например, горизонты и т.д.), геологические тела построены в 3D и т.д. Например, отверстия, трещины и т.д. могут быть построены в 3D (например, как положительные структуры, как отрицательные структуры и т.д.).
Несмотря на то, что выше были подробно описаны только несколько примеров вариантов осуществления изобретения, для специалистов в данной области техники будет очевидно, что в примерах вариантах осуществления возможны различные модификации. Соответственно, все такие модификации должны быть включены в объем данного изобретения, определенный формулой изобретения. В формуле изобретения, пункты «средства плюс функция» предназначены для охвата описанных здесь конструкций как выполняющих указанную функцию, и не только конструкционных эквивалентов, но и также эквивалентных конструкций. Таким образом, хотя гвоздь и шуруп не могут быть структурными эквивалентами в том смысле, что в случае гвоздя используется цилиндрическая поверхность для скрепления деревянных деталей, в то время как в случае шурупа используется спиральная поверхность, в среде крепления деревянных деталей гвоздь и шуруп могут быть эквивалентными структурами. Заявитель не намерен ссылаться на пункт 35 U.S.C. § 112, параграф 6 в отношении каких-либо ограничений любых пунктов формулы изобретения, за исключением тех, в которых в пункте формулы явно используются слова «средство для» вместе с соответствующей функцией.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР БАЛАНСА В ПАРКЕ НАСОСОВ ПРИ ВЫПОЛНЕНИИ ОПЕРАЦИЙ РАЗРЫВА ПЛАСТА | 2019 |
|
RU2776144C1 |
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ ОПЕРАЦИИ ИНТЕНСИФИКАЦИИ | 2012 |
|
RU2567067C1 |
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ РАБОТ ПО СТИМУЛЯЦИИ НЕДР | 2013 |
|
RU2591857C1 |
| ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ПЛОСКОСТЕЙ РАЗВИТИЯ ТРЕЩИН | 2013 |
|
RU2592751C1 |
| ОЦЕНКА ТРЕЩИНОВАТОСТИ В СКВАЖИНАХ С ОБСАЖЕННЫМ СТВОЛОМ | 2014 |
|
RU2652394C2 |
| СИСТЕМЫ И СПОСОБЫ ОПТИМИЗАЦИИ РАБОТ ГИДРОРАЗРЫВА ПЛАСТА | 2015 |
|
RU2706041C2 |
| ИДЕНТИФИКАЦИЯ КЛАСТЕРОВ ОРИЕНТАЦИИ ПО МИКРОСЕЙСМИЧЕСКИМ ДАННЫМ | 2013 |
|
RU2601535C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ФИЗИЧЕСКОГО СОСТОЯНИЯ ЭКСПЛУАТАЦИОННОГО ОБОРУДОВАНИЯ СКВАЖИНЫ И РЕГУЛИРОВАНИЯ ДЕБИТА СКВАЖИНЫ | 2008 |
|
RU2468191C2 |
| ПРЕДВАРИТЕЛЬНЫЙ АНАЛИЗ БУРОВОЙ ПЛОЩАДКИ ДЛЯ ПЛАНИРОВАНИЯ РАЗРАБОТКИ МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2489571C2 |
| УПРАВЛЕНИЕ МИКРОСЕЙСМИЧЕСКИМИ ДАННЫМИ ДЛЯ ОТСЛЕЖИВАНИЯ ТРЕЩИН | 2013 |
|
RU2602403C1 |




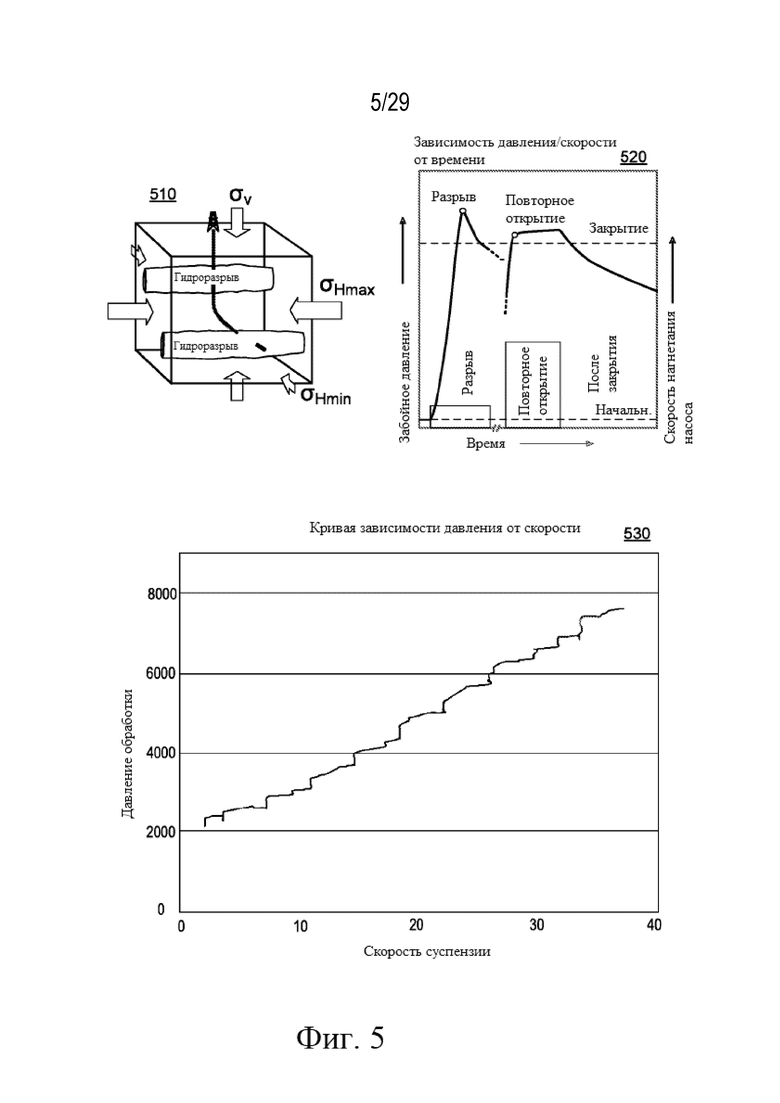
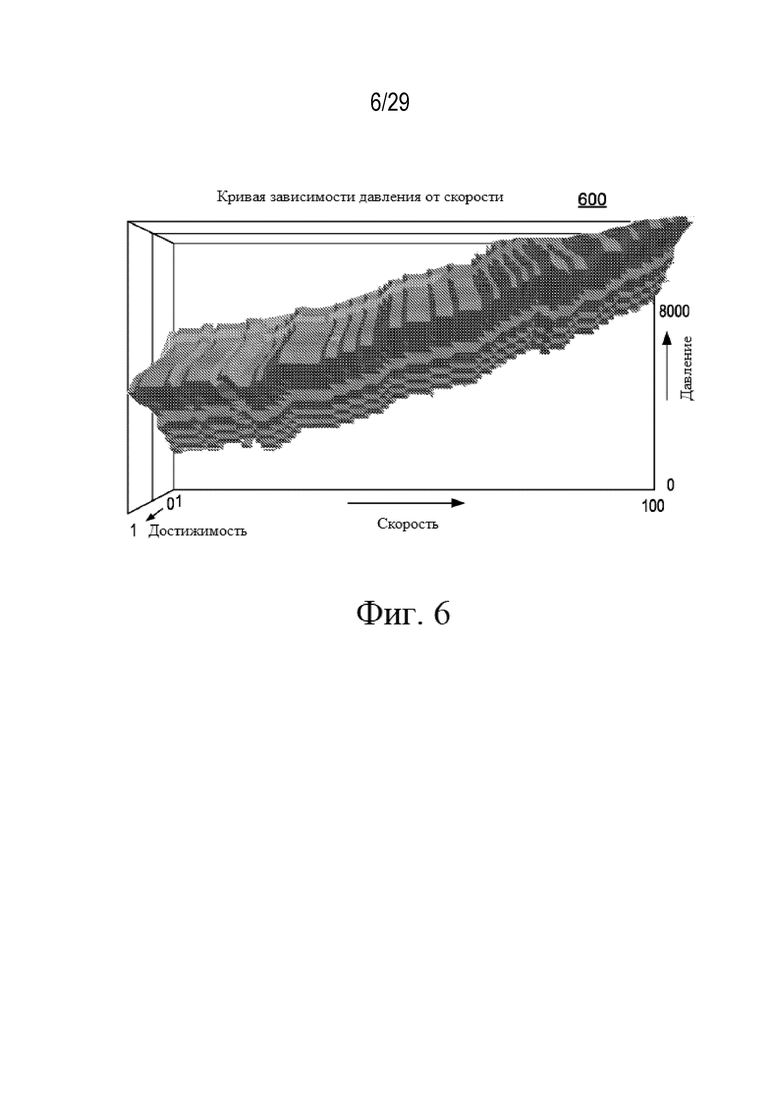



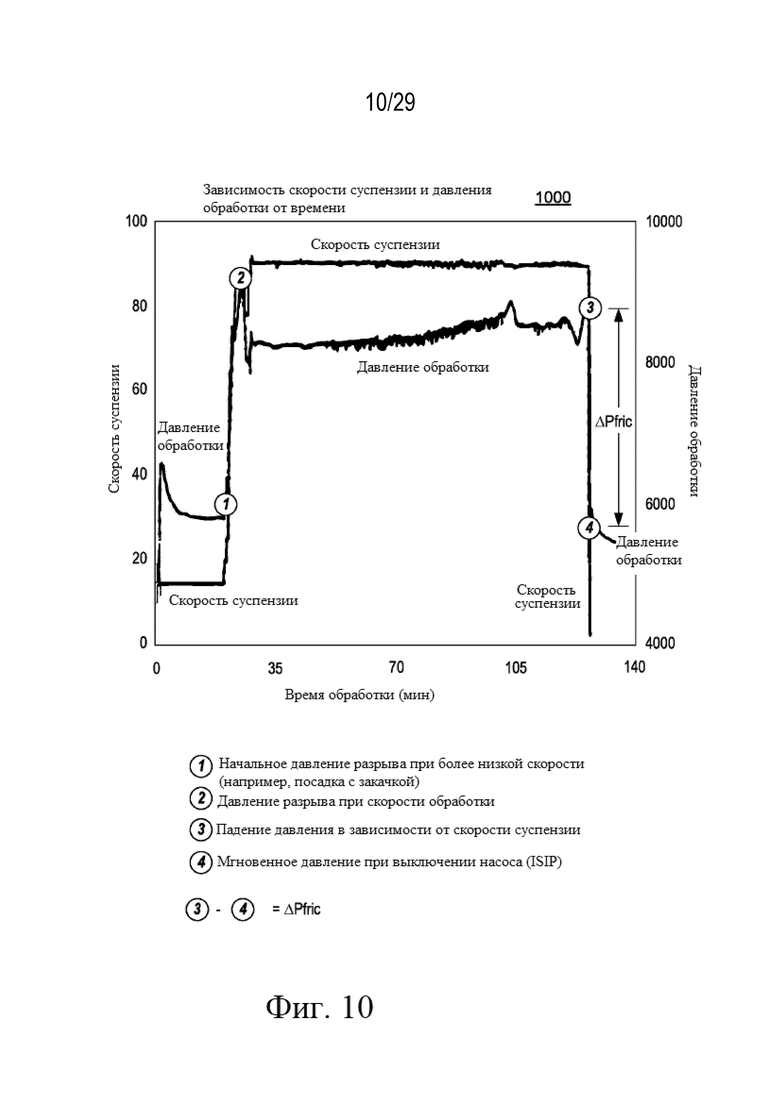

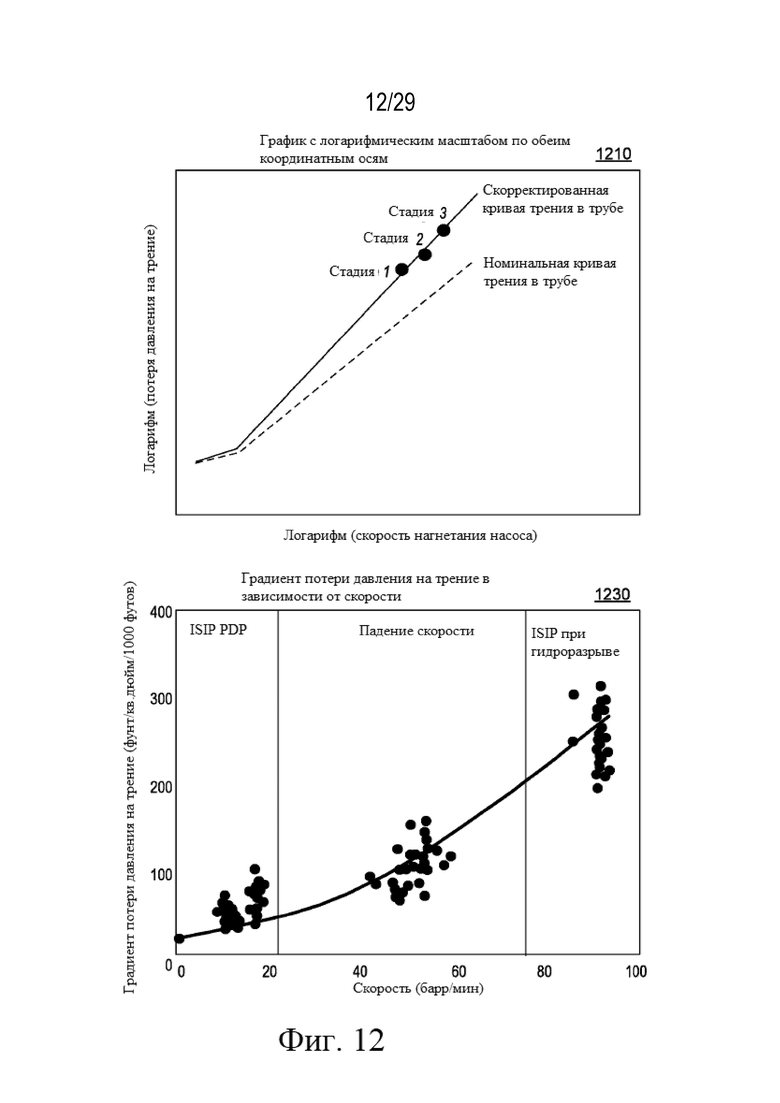




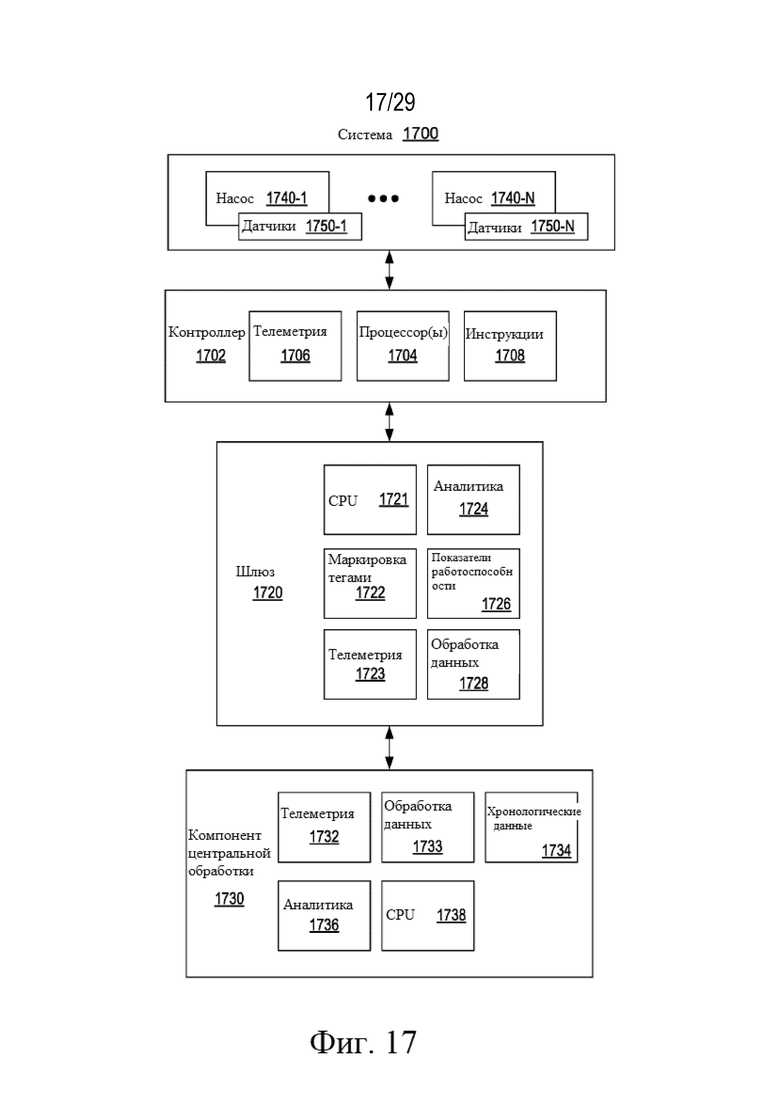







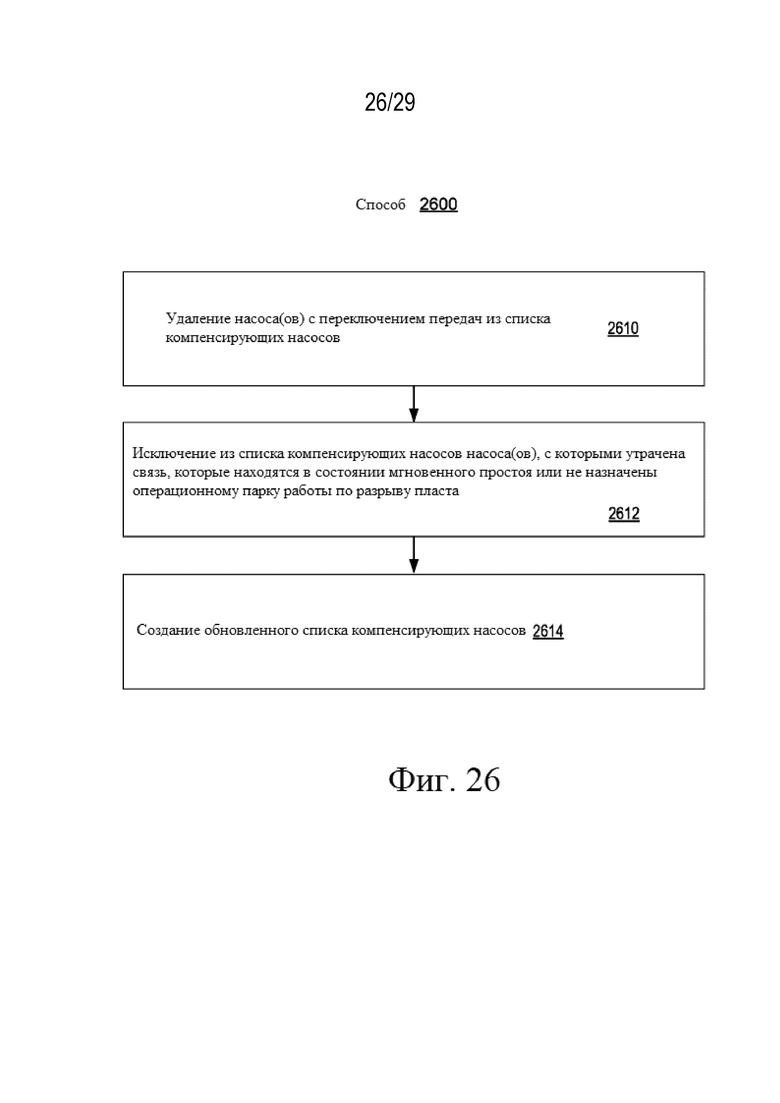



Группа изобретений относится к автоматизированному разрыву пласта с автоматическим управлением скоростью нагнетания насоса. Технический результат – поддержание давления обработки в безопасном диапазоне, равномерная стимуляция в нескольких перфорациях, минимизация времени простоя скважины во время разрыва пласта и между стадиями. Система автоматического управления скоростью нагнетания насоса при гидравлическом разрыве пласта содержит: один или более процессоров; память, доступную по меньшей мере одному из одного или более процессоров; интерфейс данных, принимающий данные, полученные одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса; интерфейс управления, передающий сигналы управления по меньшей мере одному из одного или более насосов; компонент моделирования, функционально связанный по меньшей мере с одним из одного или более процессоров, который прогнозирует давление в скважине с применением модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, при этом скважина соединена по текучей среде с по меньшей мере одним из одного или более насосов; и компонент регулировки скорости нагнетания насоса, функционально связанный с по меньшей мере одним из одного или более процессоров, который в режиме прогнозирования давления генерирует, применяя прогнозируемое давление компонента моделирования и пороговое значение давления, сигнал управления скоростью нагнетания насоса для передачи через интерфейс управления. 2 н. и 23 з.п. ф-лы, 29 ил.
1. Система (2800) автоматического управления скоростью нагнетания насоса при гидравлическом разрыве пласта, содержащая:
один или более процессоров (2810);
память (2820), доступную по меньшей мере одному из одного или более процессоров;
интерфейс (2830) данных, принимающий данные, полученные одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса;
интерфейс (2840) управления, передающий сигналы управления по меньшей мере одному из одного или более насосов;
компонент (2850) моделирования, функционально связанный по меньшей мере с одним из одного или более процессоров, который прогнозирует давление в скважине с применением модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, при этом скважина соединена по текучей среде с по меньшей мере одним из одного или более насосов; и
компонент (2860) регулировки скорости нагнетания насоса, функционально связанный с по меньшей мере одним из одного или более процессоров, который в режиме прогнозирования давления генерирует, применяя прогнозируемое давление компонента моделирования и пороговое значение давления, сигнал управления скоростью нагнетания насоса для передачи через интерфейс управления.
2. Система по п. 1, отличающаяся тем, что по меньшей мере часть данных, указывающих на фактическую скорость нагнетания насоса, содержит данные, полученные датчиком скорости нагнетания насоса.
3. Система по п. 1, содержащая компонент оценки давления на устье скважины, функционально связанный с по меньшей мере одним из одного или более процессоров, который принимает через интерфейс данных данные, полученные преобразователем давления нагнетания насоса, для генерации оценки давления на устье скважины.
4. Система по п. 1, содержащая интерфейс, который принимает данные о зависимости давления обработки от скорости нагнетания насоса, в которой компонент регулировки скорости нагнетания насоса в альтернативном режиме генерирует сигнал управления скоростью нагнетания насоса, применяя данные о зависимости давления обработки от скорости нагнетания насоса без применения прогнозируемого давления.
5. Система по п. 1, содержащая компонент обновления модели, который принимает один или более входов в компонент моделирования, который принимает сигнал управления скоростью нагнетания насоса, который применяет один или более входов в компонент моделирования и сигнал управления скоростью нагнетания насоса для определения точности сигнала управления скоростью нагнетания насоса, и который обновляет модель, по меньшей мере частично, на основе определенной точности.
6. Система по п. 1, отличающаяся тем, что компонент моделирования содержит модель потери давления на трение, прогнозирующую потерю давления на трение, которая является функцией скорости нагнетания насоса и свойства трения жидкости.
7. Система по п. 6, содержащая компонент обновления модели потери давления на трение, принимающий данные давления закачки и обновляющий модель потери давления на трение, применяя по меньшей мере часть данных давления закачки, при этом данные давления закачки содержат данные давления из операции закачки перфорационного блока в подземный трубопровод.
8. Система по п. 7, отличающаяся тем, что модель потери давления на трение применяет одно или более мгновенных давлений при выключении насоса и одно или более давлений перед выключением насоса для одной или более стадий гидроразрыва пласта для определения одной или более потерь давления на трение.
9. Система по п. 8, содержащая компонент, который применяет одну или более потерь давления на трение для регулировки кривой потери давления на трение и который применяет отрегулированную кривую потери давления на трение для оценки потери давления на трение для последующей стадии гидроразрыва пласта.
10. Система по п. 8, содержащая компонент, который применяет одно или более потерь давления на трение для регулировки кривой потери давления на трение и который применяет отрегулированную кривую потери давления на трение для оценки забойного давления.
11. Система по п. 10, содержащая компонент, который анализирует расчетное забойное давление для определения одного или более отклонений при обработке.
12. Система по п. 10, содержащая компонент, который анализирует расчетное забойное давление для определения признаков выпадения расклинивающего агента из жидкости для гидроразрыва.
13. Система по п. 12, содержащая компонент, который применяет признаки выпадения расклинивающего агента из жидкости для гидроразрыва для генерации сигнала управления скоростью нагнетания насоса для передачи через интерфейс управления для изменения скорости нагнетания насоса.
14. Система по п. 1, содержащая компонент скорости изменения давления, функционально связанный с по меньшей мере одним из одного или более процессоров, который генерирует скорость изменения давления с применением оценки давления на устье скважины и хронологических данных давления и выводит скорость изменения давления в компонент моделирования, при этом компонент моделирования генерирует прогнозируемое давление, применяя скорость изменения давления.
15. Система по п. 1, содержащая кластерный компонент, который генерирует оценки охвата трещинами, которые зависят от одного или более рабочих параметров.
16. Система по п. 15, отличающаяся тем, что сигнал управления скоростью нагнетания насоса, генерируемый компонентом регулировки скорости нагнетания насоса, реализуется способом, зависящим от одной или более оценок охвата трещинами.
17. Система по п. 15, отличающаяся тем, что кластерный компонент генерирует оценки охвата трещинами, которые зависят от данных теста ступенчатого расхода.
18. Система по п. 17, отличающаяся тем, что кластерный компонент анализирует давление и скорость потока для оценки по меньшей мере одного из доминирующей перфорации и доминирующей извилистости операции разрыва пласта.
19. Система по п. 15, отличающаяся тем, что оценки охвата трещинами содержат оценки доставки жидкости через перфорации стадии многоэтапной операции гидроразрыва пласта.
20. Способ (2882) гидроразрыва пласта с автоматическим управлением скоростью нагнетания насоса, включающий в себя этапы, на которых осуществляют:
прием данных, полученных одним или более датчиков, функционально связанных с одним или более насосов, причем один или более датчиков содержат преобразователь давления нагнетания насоса и датчик скорости нагнетания насоса (2883);
прогнозирование давления в скважине с применением модели, требуемой скорости нагнетания насоса и по меньшей мере части данных, указывающих фактическую скорость нагнетания насоса и оценку давления на устье скважины, причем скважина соединена по текучей среде с одним или более насосов (2884);
генерирование в режиме прогнозируемого давления сигнала управления скоростью нагнетания насоса с применением прогнозируемого давления и порогового значения давления (2885); и
передачу сигнала управления скоростью нагнетания насоса через интерфейс управления для управления работой по меньшей мере одного из одного или более насосов (2886).
21. Способ по п. 20, включающий в себя работу в альтернативном режиме, в котором указанное генерирование генерирует сигнал управления скоростью нагнетания насоса с применением данных о зависимости давления обработки от скорости нагнетания насоса без применения прогнозируемого давления.
22. Способ по п. 20, отличающийся тем, что указанное генерирование включает в себя применение модели потери давления на трение, которая прогнозирует потерю давления на трение, которая является функцией скорости нагнетания насоса и свойства трения жидкости.
23. Способ по п. 22, отличающийся тем, что модель потери давления на трение зависит от данных о давлении закачки операции закачки перфорационного блока в подземную трубу, и/или в котором модель потери давления на трение зависит от одного или более мгновенных давлений при выключении насоса и одно или более давлений перед выключением насоса для одной или более стадий гидроразрыва пласта.
24. Способ по п. 20, включающий в себя применение кривой потери давления на трение для оценки забойного давления и при этом забойное давление является показателем выпадения расклинивающего агента из жидкости для гидроразрыва, генерирование сигнала управления отрегулированной скоростью нагнетания насоса для снижения риска выпадения расклинивающего агента из жидкости для гидроразрыва и передачу отрегулированного сигнала управления скоростью нагнетания насоса через интерфейс управления для управления работой по меньшей мере одного из одного или более насосов.
25. Способ по п. 20, включающий в себя генерирование оценок охвата трещинами, которые зависят от одного или более рабочих параметров, при этом генерирование сигнала управления скоростью нагнетания насоса зависит от одной или более оценок охвата трещинами.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СВЯЗЬ НА МЕСТЕ В РЕАЛЬНОМ ВРЕМЕНИ ЧЕРЕЗ ИНТЕРНЕТ С ДИСПЕТЧЕРОМ СКВАЖИНЫ ДЛЯ ПОСТОЯННОЙ ОПТИМИЗАЦИИ СКВАЖИНЫ | 2008 |
|
RU2510971C2 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

