Изобретение относится к области электроэнергетики и может быть использовано в устройствах поперечной компенсации с целью уменьшения потерь электрической энергии, регулирования напряжения в местах установки данных устройств в линию электропередачи (ЛЭП), а также для обеспечения симметрирования режима работы трехфазных четырехпроводных ЛЭП при несимметричной трехфазной нагрузке.
Известен способ управления режимом работы ЛЭП, реализуемый устройством управления, построенным на основе реактивных элементов и транзисторного преобразователя, подключаемого своими зажимами к фазам ЛЭП и нейтральному проводу, формирующего токи в ЛЭП с помощью широтно-импульсной модуляции, включающий задание требуемого режима работы ЛЭП. (патент RU на изобретение №155594, опубл. 10.10.15 г.). Способ позволяет управлять токами в фазах четырехпроводной ЛЭП при различных трехфазных несимметричных нагрузках. Недостатком данного способа является наличие высокочастотных гармоник в гармоническом составе токов устройства управления при управлении режимом работы ЛЭП, что требует установки в структуру устройства управления дополнительного схемотехничесого решения в виде сглаживающего фильтра.
Наиболее близким прототипом к заявляемому способу управления является способ, использующий схему Штейнмеца (в качестве устройства управления), построенную на основе двух реактивных элементов, позволяющий преобразовывать однофазную или двухфазную нагрузку в симметричную трехфазную нагрузку, подключаемую к трехпроводной трехфазной ЛЭП. Способ и устройство позволяет симметрировать и одновременно компенсировать реактивную мощность в трехфазной ЛЭП за счет вычисления и задания значений сопротивлений управляемых реактивных элементов. (В.П. Закарюкин, А.В. Крюков, «Трехфазно-однофазные системы электроснабжения с преобразователями Штейнмеца», «Современные технологии. Системный анализ. Моделирование» №3 (59), 2018, стр. 98-107, Иркутский государственный университет сообщения). Устройство управления подключается своими входными зажимами к трехпроводной ЛЭП, а выходными зажимами к однофазной или двухфазной нагрузке. Реализация способа управления режимами работы трехпроводных ЛЭП основывается на измерении токов и напряжения в однофазных или двухфазных нагрузках, вычислении и задании, на основе измерений требуемых значений, параметров реактивных элементов, обеспечивающих симметрирование и компенсацию реактивных мощностей в трехпроводных ЛЭП.
Недостатком способа и устройства прототипа является ограниченные функциональные возможности, так как устройство может быть применено только для однофазных или двухфазных нагрузок и только в трехфазных трехпроводных ЛЭП.
Техническим результатом заявляемого изобретения является расширение функциональных возможностей способа управления режимом работы ЛЭП для случая, когда нагрузка представляет из себя несимметричную трехфазную нагрузку, подключенную к четырехпроводной ЛЭП. При этом, в зависимости от требований, заявляемый способ позволяет обеспечивать как симметрирование режима работы четырехпроводной ЛЭП, так и одновременно компенсацию реактивной мощности с помощью устройства управления.
Предметом изобретения является способ симметрирования режима работы четырехпроводной линии электропередачи, реализуемый устройством управления, подключаемым своими входными зажимами к фазам линии электропередачи, включающий задание требуемого режима работы линии электропередачи, измерение токов и напряжений в фазах нагрузки, вычисление и задание необходимых управляющих воздействий на устройство управления, при котором в составе устройства управления используют регулятор мощности, который подключают к фазам линии электропередачи, и три независимых управляемых компенсатора реактивной мощности, которые подключают параллельно фазам нагрузки, при этом управляющее воздействие на регулятор мощности, вычисляют и задают на основе измеренных значений активных мощностей фаз нагрузки, а значения реактивных мощностей трех независимых управляемых компенсаторов реактивной мощности вычисляют и задают на основе измеренных реактивных мощностей фаз нагрузки, реактивных мощностей фаз регулятора мощности и заданных значений реактивных мощностей в линии электропередачи.
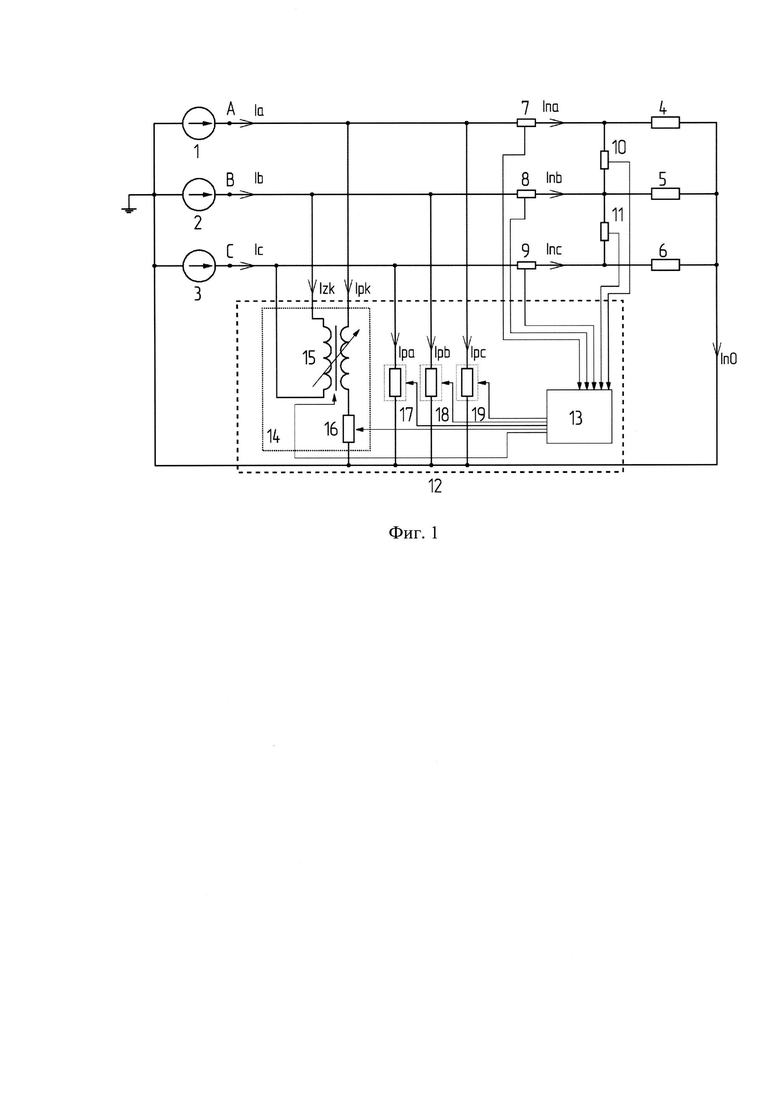
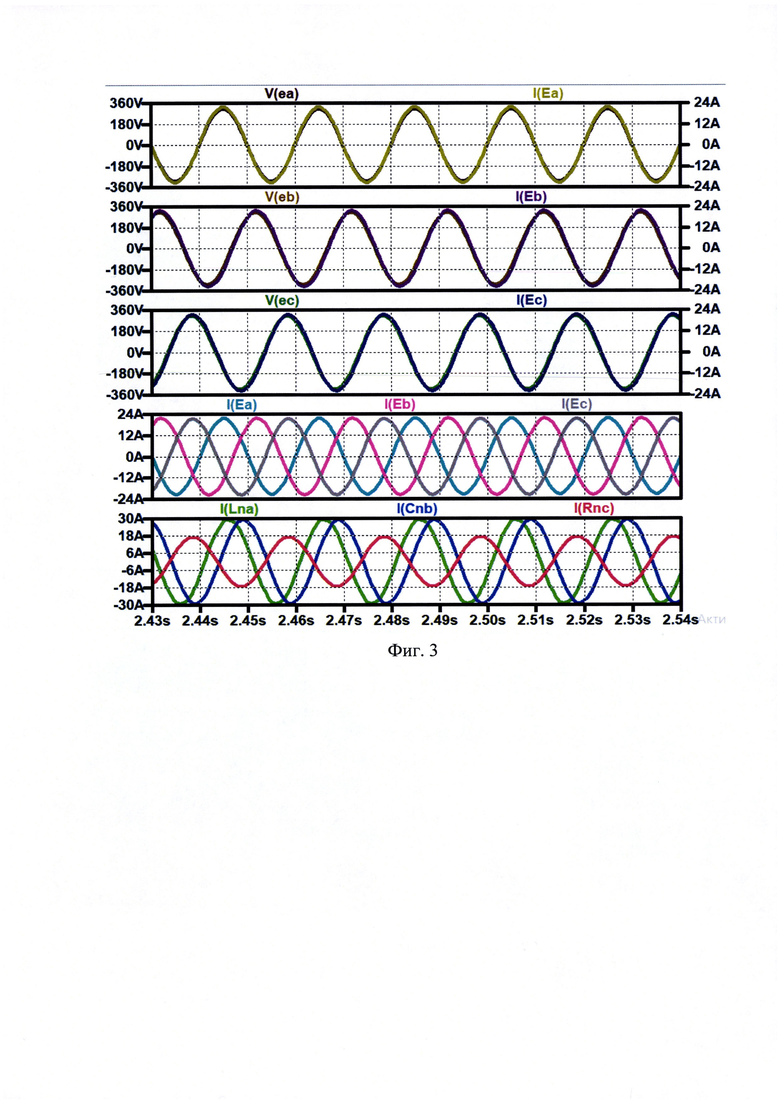
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена схема подключения устройства к трехфазной четырехпроводной ЛЭП, реализующего способ управления режимом работы ЛЭП (далее устройство управления). Упрощенная внутренняя структура устройства управления включает в себя регулятор мощности, состоящий из трансформатора с регулируемым коэффициентом трансформации и управляемого реактивного элемента, трех независимых управляемых компенсаторов реактивной мощности, построенных на основе управляемых реактивных элементов и подключенных соответственно к каждой из фаз нагрузки. На фиг. 2 приведены результаты моделирования в среде LTspice симметрирования режима работы ЛЭП с помощью устройства управления для конкретного приведенного примера несимметричной нагрузки. На фиг. 3 приведены результаты моделирования в среде LTspice симметрирования и полной компенсации компенсации реактивных мощностей в ЛЭП для того же приведенного примера несимметричной нагрузки с помощью устройства управления.
Линия электропередачи, представленная на фиг. 1, сформирована тремя фазными генераторами 1, 2, 3, образующими симметричную систему напряжений фаз А, В, С четырехпроводной ЛЭП. Трехфазная несимметричная нагрузка представлена в соответствующих фазах сопротивлениями 4, 5, 6. Датчики токов в фазах линии электропередачи 7, 8, 9 предназначены для измерения токов Ina, Inb, Inc в соответствующих фазах нагрузки. Датчики напряжения 10, 11 измеряют линейные напряжения линии электропередачи. Устройство управления 12 включает в себя систему управления 13, входы которой соединены с выходами датчиков тока нагрузки 7, 8, 9 и выходами датчиков напряжения 10 и 11. Блок 14 представляет силовую схему регулятора мощности в составе устройства управления 12. Блок 14 построен на основе трансформатора 15 с регулиремым коэффициентом трансформации и управляемого реактивного элемента 16. Первичная обмотка трансформатора 15 с регулируемым коэффициентом трансформации подключается своими выходными зажимами к фазе В и С линии электропередачи, а его вторичная обмотка подключается одним выходным зажимом к фазе А, а другим через последовательно соединенный управляемый реактивный элемент 16 к нейтральному проводу. Управляющие входы трансформатора 15 с регулируенмым коэффициентом трансформации и управляемого реактивного элемента 16 соеденены с соответствующими выходами блока системы управления 13 устройства управления 12. Каждый из независимых управляемых компенсаторов реактивной мощности, представляет собой независимый управляемый реактивный элемент 17, 18 и 19, один выходной зажим которого подключается к нейтральному проводу, а второй выходной зажим подключается к фазам А, В и С соответственно. Управляющие входы независимых управляемых реактивных элементов 17, 18, 19 подключены к соотвествующим управляющим выходам блока системы управления 13 устройства управления 12.
Способ управления работает следующим образом. При несимметричной нагрузке 4, 5, 6, токи Ina, Inb, Inc в фазах А, В, С ЛЭП (фиг.1) представляют из себя несимметричную систему токов, которую, используя метод симметричных составляющих, можно разложить на три симметричные составляющие токов: токи нулевой, прямой и обратной последовательностей. Устройство управления 12, подключенное своими входными зажимами к фазам А, В, С ЛЭП и к нейтральному проводу, формирует на своих выходных зажимах соответствующую несимметричную систему токов Izk, Ipk регулятора мощности 14 и несимметричную систему токов Ipa, Ipb, Ipc независимых управляемых реактивных элементов 17, 18, 19, которые в сумме также могут быть представленны виде симметричных систем токов нулевой, прямой и обратной последовательностей.
Заявляемый способ предполагает формирование и управление суммарной системой токов Ipa, Ipb, Ipc, Izk, Ipk на выходных зажимах устройства управления 12 путем управления значением коэффициента трансформации трансформатора 15 с регулируемым коэффициентом трансформации, значением сопротивления управляемого реактивного элемента 16 в составе регулятора мощности 14 и значениями сопротивлений независимых управляемых реактивных элементов 17, 18, 19. Значения коэффициента трансформации и реактивных элементов устройства управления 12 определяются в блоке системы управления 13 путем измерения токов и напряжений в фазах нагрузки 4, 5, 6, вычисления активных и реактивных мощностей в каждой из фаз нагрузки 4, 5, 6, реактивных мощностей фаз регулятора мощности 14 с учетом заданных требуемых значений реактивных мощностей в фазах линии электропередачи.
Устройства управления 12, предназначеное для симметрирования режима работы ЛЭП, работает следующим образом. Токи на выходных зажимах устройства управления 12, создаваемые регулятором мощности 14 и независимыми управляемыми реактивными элементами 17, 18, 19, представляют собой несимметричные системы токов, которые можно разложить на токи прямой, обратной и нулевой последовательности. При симметрировании режима работы ЛЭП, токи обратной и нулевой последовательности в фазах нагрузки должны быть скомпенсированы токами обратной и нулевой последовательности устройства управления 12. В этом случае суммарные токи линии электропередачи будут симметричными и определяться суммой токов прямой последовательности нагрузки 4, 5, 6 и токов устройства управления 12. В общем случае, суммарные токи в фазах А, В и С ЛЭП будут симметричные и сдвинуты одинаково по фазе относительно соответствующих фазных напряжений ЛЭП.
Для регулятора мощности 14 величина коэффициента трансформации трансформатора 15 с регулируемым коэффициентом трансформации и значение сопротивления управляемого реактивного элемента 16, обозначаемых соответственно Kt, Xp, и линейные напряжения ЛЭП, однозначно определяют величины фазных токов Izk, Ipk на выходных зажимах регулятора мощности 14 (фиг. 1). Величины сопротивлений независимых управляемых реактивных элементов 17, 18, 19, обозначаемых соответственно Хра, Xpb, Хрс, и линейные напряжения ЛЭП, однозначно определяют величины фазных токов Ipa, Ipb, Ipc независимых управляемых рекативных элементов 17, 18, 19. Аналогично однозначно определены активные и реактивные мощности в фазах регулятора мощности 14 и независимых управляемых реактивных элементов, 17, 18, 19, обозначенных соответственно как Pka, Pkb, Pkc, Qka, Qkb, Qkc и Ppa, Ppb, Ppc, Qpa, Qpb, Qpc. Поскольку силовая схема регулятора мощности 14 построена на основе трансформатора 15 с управляемым коэффициентом трансформации и управляемого реактивного элемента 16, активными потерями в них можно пренебречь. С учетом этих допущений для активных мощностей фаз регулятора мощности 14 справедливо соотношение:

Так как управляемые компенсаторы реактивной мощности также построены на основе управляемых реактивных элементов 17, 18, 19 активными потерями в них также можно пренебречь. Для активных мощностей каждого независимого управляемого реактивного элемента 17, 18, 19 справедливы выражения:

Независимые управляемые реактивные элементы 17, 18, 19, в отличии от регулятора мощности 14, управляют только реактивной мощностью в фазах ЛЭП и не влияют на активные оставляющие мощностей в фазах ЛЭП.
При заданных значениях сопротивлений нагрузки 4, 5, 6 и фазных напряжениях ЛЭП токи в фазах нагрузки линии электропередачи Ina, Inb, Inc, также как их активные Pna, Pnb, Pnc и реактивные мощности Qna, Qnb, Qnc однозначно определены.
Очевидно, что при симметрировании режима работы ЛЭП с помощью устройства управления 12, соответствующие активные Ра, Pb, Рс и реактивные Qa, Qb, Qc мощности в фазах ЛЭП будут одинаковыми и, с учетом выражений (1) и (2), могут быть определены в соответствии с выражениями:
Для каждой из фаз ЛЭП можно записать следующее соотношения для активных мощностей в фазах ЛЭП:

Зная значения активных мощностей в фазах нагрузки Pna, Pnb, Pnc и соответствующие им симметричные значения активных мощностей в фазах ЛЭП Ра, Pb, Рс, определяемые соотношением (3), можно определить активные мощности фаз регулятора мощности 14 (Pka, Pkb, Pkc). С учетом известных активных мощностей фаз регулятора мощности 14 (Pka, Pkb, Pkc), соответствующие им коэффициент трансформации Kt трансформатора 15 с регулируемым коэффициентом трансформации и значение сопротивления Хр управляемого реактивного элемента 16, вычисляются с использованием соотношений:
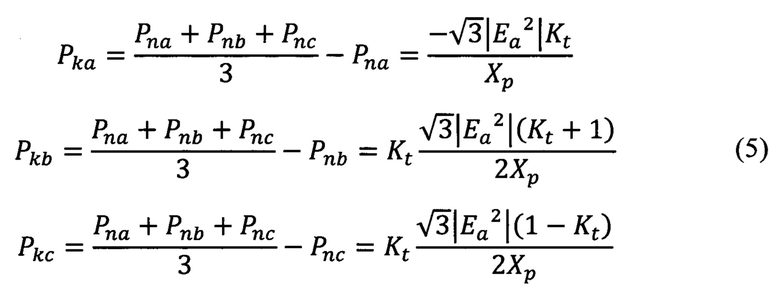
где Еа - напряжение фазы А ЛЭП.
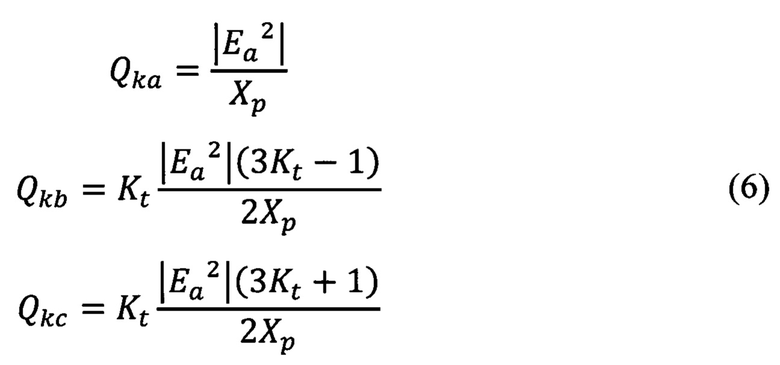
При этом, соответствующие реактивные мощности фаз Qka, Qkb, Qkc регулятора мощности 14, при найденных Kt, Xp, вычисляются по выражениям:
Для реактивных мощностей каждой из фаз ЛЭП справедливы соотношения:
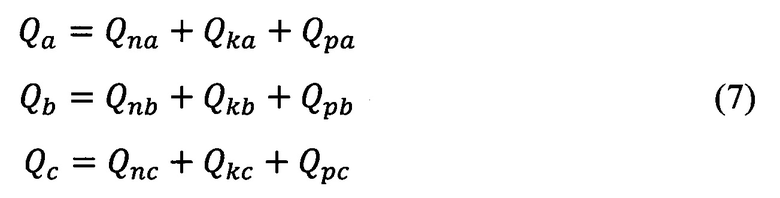
При известных реактивных мощностях в фазах нагрузки (Qna, Qnb, Qnc), заданных симметричных реактивных мощностях в ЛЭП (Qa=Qb=Qc) и вычисленных реактивных мощностях в фазах регулятора мощности 14 (Qka, Qkb, Qkc), значения сопротивлений (Хра, Xpb, Хрс) независимых управляемых реактивных элементов 17, 18, 19 и их реактивные мощности (Qpa, Qpb, Qpc), определяются согласно системе уравнений:
Отметим, что в результате расчета, значения сопротивлений управляемых реактивных элементов Хра, Xpb, Хрс могут быть как положительными, так и отрицательными. При положительных знаках сопротивлений управляемых реактивных элементов они представляются реактивными элементами индуктивного характера. При отрицательных знаках они представляются реактивными элементами емкостного характера.
Таким образом, на основе измерения активных мощностей в фазах нагрузки ЛЭП, из соотошений (5) и (8) можно вычислить коэффициент трансформации (Kt) трансформатора 15 с регулируемым коэффициентом трансформации и величну сопротивления (Хр) управляемого реактивного элемента 16 регулятора мощности 14. По заданным значениям реактивных мощностей в фазах линии электропередачи (Qa, Qb, Qc) можно вычислить и определить значения сопротивлений независимых управляемых реактивных элементов 17, 18, 19 устройства управления 12 для реализации заданного симметричного режима работы ЛЭП.
Для реализации полной компенсации реактивных мощностей при симметрировании режима работы ЛЭП необходимо не только компенсация токов обратной и нулевой последовательности нагрузки, но и воздействие на токи прямой последовательности ЛЭП, обеспечивая отсутствие сдвига фаз между результирующим током ЛЭП и фазным напряжением. Компенсация реактивных мощностей в ЛЭП достигается путем регулирование токов фаз независимых управляемых реактивных элементов 17, 18, 19 с помощью изменения значений и характера их сопротивлений. При этом регулятор мощности 14 должен обеспечивать выравнивание активных мощностей в фазах ЛЭП. Это обеспечивается путем соответствующего расчета (выражения 5) и задания значений Kt и Xp, регулятора мощности 14 по измеренным активным мощностям фаз нагрузки. При известных значениях Kt, Xp, система уравнения для нахождения значений сопротивлений Xpa, Xpb, Xpc независимых управляемых реактивных элементов 17, 18, 19 имеет вид:
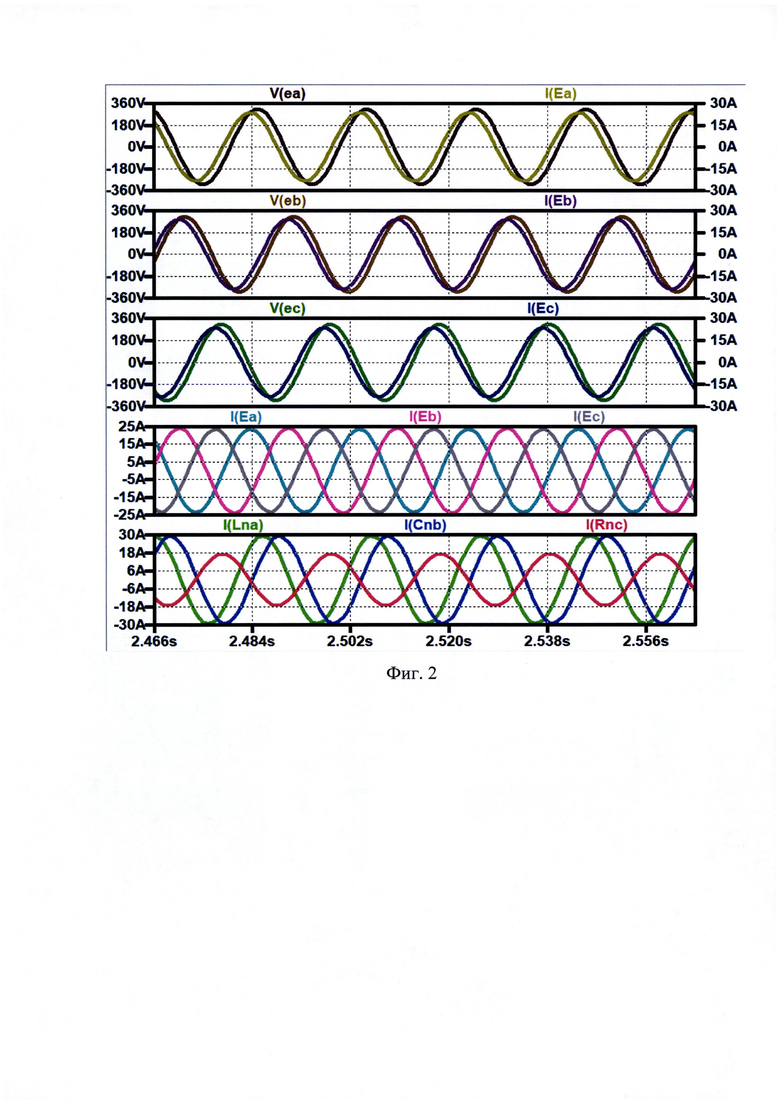
Как видно из выражений (9) для симметрирования и полной компенсации реактивной мощности в ЛЭП, необходимо измерять активные и реактивные мощности в каждой из фаз ЛЭП и управлять характером и величиной сопротивления управляемого реактивного элемента каждого независимого управляемого компенсатора реактивной мощности. На фиг. 2 приведены результаты моделирования режима работы ЛЭП, в программе LTspice, при заданных параметрах нагрузок фаз и заданных значений реактивной мощности в фазах ЛЭП (Qa=Qb=Qc=-1522.8 вар) для симметрирования режима работы ЛЭП с помощью устройства управления 12, представленного на фиг. 1. Значения коэффициента трансформации трансформатора 15 с управляемым коэффициентом трансформации, сопротивление управляемого реактивного элемента 16 регулятора мощности 14 и сопротивления независимых управляемых реактивных элементов 17, 18, 19 независимых управляемых компенсаторов реактивной мощности вычислены по выражениям (5) и (8).
Параметры ЛЭП:

Требуемая реактивная мощность в фазах ЛЭП
Qa=Qb=Qc=-1522.8 вар
Параметры режима работы нагрузки:
Zna=10+j3Oм, Znb=7-j8Oм, Znc=18+j Ом
Pna=4440 Вт; Pnb=2998 Вт; Pnc=2681 Вт
Qna=1332 вар; Qnb=-3427 вар; Qnc=149 вар
Расчитанный параметры устройства управления Kt, Хр, Хра, Xpb, Хрс:
Kt=-0.298, Хр=-j23.374 Ом
Хра=-j61.75 Ом, Xpb=j 19.45 Ом, Zpc=-j28.39 Ом
Расчитанный режима работы устройства управления:
Pka=-1067 Вт; Pkb=375 Вт; Pkc=692 Вт
Qka=-2071 вар; Qkb=-584 вар; Qkc=32.7 вар
Qpa=-783.7 вар; Qpb=2488.2 вар; Qpc=-1704.5 вар
Результат симметрирования режима работы ЛЭП
Ра=Pb=Рс=3373 Вт
Qa=Qb=Qc=-1522.8 вар
На фиг. 3 приведены результаты моделирования режима работы ЛЭП, в программе LTspice, при тех же параметрах сопротивлений фаз нагрузок для симметрирования и полной компенсации реактивных мощностей в фазах ЛЭП с помощью устройства управления 12 (фиг. 1). Величина коэффициента трансформации трансформатора 15 с регулируемым коэффициентом трансформации и величина сопротивления управляемого реактивного элемента 16 в составе регулятора мощности 14 остаются неизменными и расчитываются по выражениям (5). Сопротивления независимых управляемых реактивных элементов 17, 18, 19 расчитаны по выражениям (9).
Параметры ЛЭП:

Требуемая активная и реактивная мощность в фазах ЛЭП
Qa=Qb=Qc=0 вар
Параметры режима работы нагрузки:
Zna=10+j3 Ом,Znb=7 - j8 Oм, Znc=18+j Ом
Pna=4440 Вт; Pnb=2998 Вт; Pnc=2681 Вт
Qna=1332 вар; Qnb=-3427 вар; Qnc=149 вар
Расчитанный параметры устройства управления Kt, Хр, Хра, Xpb, Хрс:
Kt=-0.298, Хр=-j23.374 Ом
Xpa=j65.49 Ом, Xpb=j12.06 Ом, Хрс=-j266.3 Ом
Расчитанный режима работы устройства управления:
Pka=-1067 Вт; Pkb=375 Вт; Pkc=692 Вт
Qka=-2071 вар; Qkb=-584 вар; Qkc=32.7 вар
Qpa=739 вар; Qpb=4011 вар; Qpc=-181.7 вар
Результат симметрирования режима работы и компенсации реактивных мощностей в фазах ЛЭП Ра=Pb=Рс=3373 Вт Qa=Qb=Qc=0 вар
Таким образом, предлагаемый способ управления обеспечивает расширение функциональных возможностей способа управления режимом работы ЛЭП для случая трехфазных несимметричных нагрузок трехфазной четырехпроводной ЛЭП. Использование измеренных значений активных и реактивных мощностей фаз нагрузок, для расчета величин реактивных элементов 16, 17, 18, 19, и коэффициента трансформации трансформатора 15 с регулируемым коэффициентом трансформации устройства управления 12, значительно упрощает алгоритмы их расчета, реализуемых в блоке системы управления 13, что, в конечном счете, приводит к упрощению реализации предлагаемого способа управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХФАЗНОЕ СИММЕТРИРУЮЩЕЕ УСТРОЙСТВО | 2023 |
|
RU2807035C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2749279C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2020 |
|
RU2742942C1 |
| РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ТРЕХФАЗНОЙ СЕТИ | 2020 |
|
RU2743251C1 |
| ТРЕХФАЗНЫЙ СТАТИЧЕСКИЙ КОМПЕНСАТОР МОЩНОСТИ | 2020 |
|
RU2734399C1 |
| ТРЕХФАЗНЫЙ СТАТИЧЕСКИЙ КОМПЕНСАТОР МОЩНОСТИ | 2020 |
|
RU2745329C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ СОПРОТИВЛЕНИЕМ КОМПЕНСАТОРА РЕАКТИВНОЙ МОЩНОСТИ | 2022 |
|
RU2798470C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ТОКОВ ОДНОФАЗНЫХ ЗАМЫКАНИЙ НА ЗЕМЛЮ В ТРЕХФАЗНЫХ ТРЕХПРОВОДНЫХ ЛИНИЯХ ЭЛЕКТРОПЕРЕДАЧИ | 2023 |
|
RU2809231C1 |
| УПРАВЛЯЕМОЕ УСТРОЙСТВО ПРОДОЛЬНОЙ КОМПЕНСАЦИИ ДЛЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2018 |
|
RU2690518C1 |
| УСТРОЙСТВО ПРОДОЛЬНОЙ КОМПЕНСАЦИИ ДЛЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2018 |
|
RU2683784C1 |
Использование: в области электроэнергетики. Технический результат - расширение функциональных возможностей способа управления режимом работы линии электропередачи, позволяющих управлять режимами работы четырехпроводных линий электропередачи, работающих на несимметричную нагрузку. Способ реализуют устройством управления, которое подключают входными зажимами к фазам линии электропередачи. Согласно способу задают требуемый режим работы линии электропередачи, измеряют токи и напряжения в фазах нагрузки, вычисляют и задают необходимые управляющие воздействия на устройство управления. В состав устройства управления вводят регулятор мощности, который подключают к фазам линии электропередачи, и три независимых управляемых компенсатора реактивной мощности, которые подключают параллельно фазам нагрузки. Управляющее воздействие на регулятор мощности вычисляют и задают на основе измеренных значений активных мощностей фаз нагрузки, а значения реактивных мощностей трех независимых управляемых компенсаторов реактивной мощности вычисляют и задают на основе измеренных реактивных мощностей фаз нагрузки, реактивных мощностей фаз регулятора мощности и заданных значений реактивных мощностей в линии электропередачи. 3 ил.
Способ симметрирования режима работы четырехпроводной линии электропередачи, реализуемый устройством управления, подключаемым своими входными зажимами к фазам линии электропередачи, включающий задание требуемого режима работы линии электропередачи, измерение токов и напряжений в фазах нагрузки, вычисление и задание необходимых управляющих воздействий на устройство управления, отличающийся тем, что в составе устройства управления используют регулятор мощности, который подключают к фазам линии электропередачи, и три независимых управляемых компенсатора реактивной мощности, которые подключают параллельно фазам нагрузки, при этом управляющее воздействие на регулятор мощности вычисляют и задают на основе измеренных значений активных мощностей фаз нагрузки, а значения реактивных мощностей трех независимых управляемых компенсаторов реактивной мощности вычисляют и задают на основе измеренных реактивных мощностей фаз нагрузки, реактивных мощностей фаз регулятора мощности и заданных значений реактивных мощностей в линии электропередачи.
| СПОСОБ СИММЕТРИРОВАНИЯ ФАЗНЫХ ТОКОВ ТРЁХФАЗНОЙ ЧЕТЫРЁХПРОВОДНОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2598760C1 |
| УСТРОЙСТВО ДЛЯ СИММЕТРИРОВАНИЯ И КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2002 |
|
RU2229766C1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2010 |
|
RU2449651C1 |
| US 4891569 A1, 02.01.1990. | |||

