Изобретение относится к управляющим и регулирующим средствам управления технологическими процессами.
Известен комплекс программно-аппаратных средств автоматизации управления технологическими процессами (патент РФ №2279117, МПК G05B 19/418, 15/02, опубл. 27.06.2006 г.). Комплекс содержит объединенные через локальную вычислительную сеть Ethernet рабочие станции и серверы на базе персональных электронных вычислительных машин (ПЭВМ), а также контроллеры и функциональные модули. Встроенные в каждый модуль функциональные программируемые логические интегральные схемы поддерживают «зашивку» практически любых алгоритмов обработки сигналов и управления, адекватных задачам, которые возлагает проектант на данный модуль. Возможны три варианта построения систем на базе средств комплекса: централизованного управления; локального управления; распределенного управления. Во всех трех вариантах модуль центрального процессора (под управлением программного обеспечения) выполняет начальное конфигурирование модулей функциональных, обмен информацией, контроль и диагностику программных и аппаратных средств.
Недостатком данного аналога являются слишком сложная структура управления, не позволяющая создать простое и удобное в использовании устройство.
Известна автоматическая система управления технологическим процессом (патент РФ №87272, МПК G05B 19/418, G05B 15/02, опубл. 27.09.2009), которая содержит программируемый логический контроллер, модули ввода-вывода цифровых и/или аналоговых сигналов, аппаратуру связи и блоки питания, блоки согласования электрических сигналов, устройство передачи информации.
Недостатком данного аналога являются слишком сложная структура управления, не позволяющая создать простое и удобное в использовании устройство.
Наиболее близким аналогом заявляемого изобретения, выбранным в качестве прототипа, является устройство управления двухкоординатным электроприводом, содержащее блок дистанционного управления (модуль управления электроприводом), снабженный управляющим устройством (модуль логики), соединенным с исполнительным устройством (узел драйверов двигателя), блок разгрузки (модуль датчиков) и ПЭВМ (модуль центрального процессора), связанную с управляющим устройством (патент РФ №63077, МПК G05B 19/418, 15/02, опубл. 10.05.2007).
Устройство управления двухкоординатным электроприводом предназначено для выполнения функций сбора, обработки данных и управления твердомером при измерении механических характеристик металлов по диаграмме вдавливания шара.
Устройство управления обеспечивает выполнение следующего комплекса функций:
- прием и преобразование аналоговых и цифровых сигналов, поступающих от датчиков (с возможностью запитки датчиков);
- расчет неизмеряемых технологических параметров;
- авторегулирование по заданным законам;
- блокировки и защиты по предельным значениям технологических параметров;
- формирование и выдача аналоговых и цифровых сигналов управления на исполнительные механизмы;
- возможность подключения к сети Ethernet IEEE-802.3u (10/100 Мбит/с);
- возможность архивирования данных на флеш-накопитель USB 1.1;
- функциональный контроль и диагностика технических и программных средств.
Однако, данное устройство является недостаточно надежным в использовании, что обусловлено отсутствием двойного контроля за состоянием системы разгрузки.
Виброиспытательные установки (ВИУ) имеют систему статической разгрузки подвижной части, предназначенную для поднятия подвижной части в среднее положение, относительно которого она будет перемещаться (вибрировать) во время работы. В процессе работы с установками, при проведении опасных и особо опасных работ, для повышения безопасности проведения испытаний, повышения надежности работы оборудования или по каким-либо другим производственным причинам, возникает необходимость удаленного (дистанционного) контроля и управления системой разгрузки.
Технический результат, получаемый при использовании предлагаемого технического решения, - дистанционный контроль и управление системой разгрузки виброиспытательной установки.
Указанный технический результат достигается тем, что в устройстве дистанционного управления системой разгрузки виброиспытательной установки, содержащем блок дистанционного управления, снабженный управляющим устройством, соединенным с исполнительным устройством, блок разгрузки и ПЭВМ, связанную с управляющим устройством, согласно изобретению блок дистанционного управления снабжен пневмораспределителем, соединенным с исполнительным устройством и виброиспытательной установкой, блок разгрузки снабжен ручным регулятором давления, усилителем и индикатором, связанным с управляющим устройством, ручной регулятор давления связан с пневмораспределителем, усилитель соединен с установкой, исполнительное устройство выполнено в виде электронного регулятора давления, ПЭВМ связана с управляющим устройством с помощью интерфейса Ethernet.
Всей совокупностью существенных признаков обеспечивается технический результат. Этого добились за счет следующего: ПЭВМ и управляющее устройство обеспечивают контроль и управление системой разгрузки, а наличие у управляющего устройства интерфейса Ethernet позволяет работать на дистанции; при этом пневмораспределитель обеспечивает переключение с дистанционного управления на местное (штатное) и обратно.
При анализе уровня техники не обнаружено аналогов, характеризующихся признаками, тождественными всем существенным признакам данного изобретения. А также не выявлено факта известности влияния признаков, включенных в формулу, на технический результат заявляемого технического решения. Следовательно, заявленное изобретение соответствует условиям «новизна» и «изобретательский уровень».
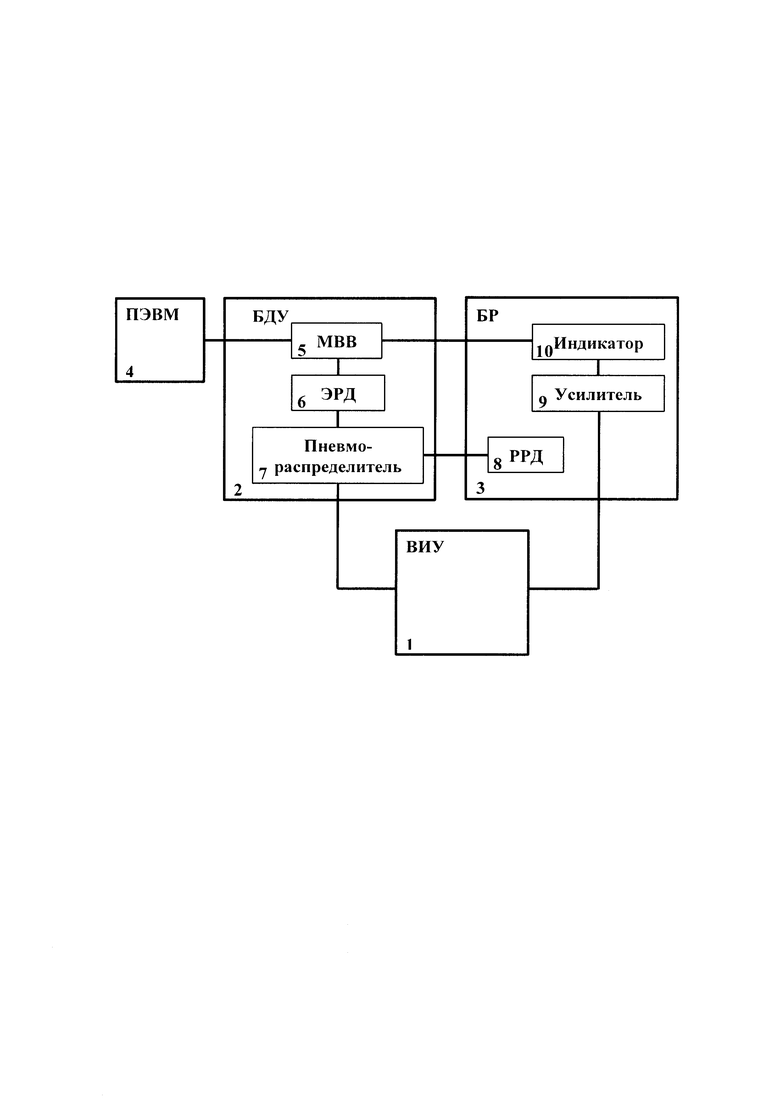
На фиг. представлена структурная схема предлагаемого устройства.
Устройство дистанционного управления системой разгрузки (CP) виброиспытательной установки 1 (ВИУ) содержит: блок дистанционного управления 2 (БДУ), блок разгрузки 3 (БР) и ПЭВМ 4. БДУ 2 включает соединенные между собой управляющее 5 и исполнительное 6 устройства, а также пневмораспределитель 7, соединенный с исполнительным устройством и ВИУ 1. Управляющее устройство 5 выполнено в виде модуля ввода-вывода (МВВ), исполнительное устройство 6 - в виде электронного регулятора давления (ЭРД).
БР 3 содержит ручной регулятор давления 8 (РРД), усилитель 9 (например, инфракрасный) и индикатор 10 (например, светодиодный). ПЭВМ 4 связана с управляющим устройством 5 напрямую с помощью интерфейса Ethernet. Индикатор 10 соединен управляющим устройством 5, усилитель 9 - с виброиспытательной установкой 1, РРД 8 - с пневмораспределителем 7.
Таким образом, CP имеет ручное местное управление, реализованное с помощью РРД 8, посредством которого регулируется подача сжатого воздуха, поступающего от компрессора (на фиг. не показано), а также дистанционное управление, реализованное посредством ЭРД 6. Индикатор 10 служит для контроля положения поднимаемого узла установки (в качестве обратной связи может использоваться оптический датчик с инфракрасным усилителем).
CP представляет собой герметичную камеру (амортизатор, подушка, диафрагма), связанную жестко с подвижной частью установки. Грузоподъемность таких CP зависит от конструктивного исполнения и величины подаваемого давления сжатого воздуха, и может составлять от 2-5 тонн и более. Устройство работает следующим образом.
При подаче в камеру CP сжатого воздуха (давлением ~ от 0,1 до 10 бар) подвижная часть, за счет создаваемого избыточного давления в камере, поднимается. Сигнал с усилителя 9 в виде постоянного напряжения, используемый для световой индикации CP подается на MBB 5, для обратной связи (положение подвижной части). МВВ 5 управляет ЭРД 6 сигналом постоянного напряжения.
Контроль давления в камере CP может осуществляться также в программе, значение давления измеряется встроенным датчиком давления на выходе ЭРД, после чего передается на МВВ.
Таким образом, ПЭВМ позволяет получать оцифрованные сигналы через МВВ, а также задавать управляющее воздействие на ЭРД 6 через МВВ 5. А также: контролировать положение подвижной части, значение избыточного давления в камере CP, регулировать давление в камере CP, автоматически устанавливать подвижную часть в нужное положение, изменять настройки ЭРД, контролировать ошибочные нарушения последовательности действий оператора.
Расстояние, на котором осуществляется управление и контроль CP, может быть увеличено до больших значений за счет масштабируемости сегментов сети (интерфейса Ethernet). Масштабируемость обеспечивается использованием дополнительного устройства на каждый сегмент сети - повторителя (коммутатора, терминала). Количество сегментов неограниченно. При использовании оптического кабеля расстояние одного сегмента увеличивается (необходимо применение оптических медиаконвертеров).
Таким образом, устройство дистанционного управления CP позволяет удаленно (на расстоянии от 1-100 м и более) регулировать давление подаваемого сжатого воздуха, тем самым управлять CP (в ручном или автоматическом режиме), а также контролировать значение давления в ней.
Представленные данные свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- средство, воплощающее заявленное устройство при его осуществлении, предназначено для использования в виброиспытательных установках (вибростендах) в разных областях промышленности, особенно при проведении опасных и особо опасных работ, для которых необходимо дистанционное управление;
- для заявляемого устройства в том виде, в котором оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ (БАР) | 2010 |
|
RU2457530C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЗАПИРАТЕЛЬНОГО АППАРАТА ПРЯМОЙ КИШКИ | 1991 |
|
RU2008797C1 |
| МОДУЛЬНАЯ РАСПРЕДЕЛЕННАЯ УПРАВЛЯЮЩАЯ СИСТЕМА | 2010 |
|
RU2446446C1 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАЛОГАБАРИТНЫЙ (БАР-М) | 2012 |
|
RU2487385C1 |
| Комплексная система мониторинга, контроля и управления техническими системами жизнеобеспечения и безопасности автономных объектов | 2020 |
|
RU2759757C1 |
| СПОСОБ ТОРМОЖЕНИЯ ЛОКОМОТИВА И КРАН ВСПОМОГАТЕЛЬНОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2444453C1 |
| Способ автоматизированного контроля работоспособности и диагностики неисправностей радиоэлектронной аппаратуры | 2022 |
|
RU2797535C1 |
| КОМПЛЕКСНАЯ СИСТЕМА МОНИТОРИНГА, КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ СИСТЕМАМИ ЖИЗНЕОБЕСПЕЧЕНИЯ И БЕЗОПАСНОСТИ АВТОНОМНЫХ ОБЪЕКТОВ | 2019 |
|
RU2719714C1 |
| ПОДВИЖНАЯ СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ | 2020 |
|
RU2729037C1 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ И РАДИОДОСТУПА | 2023 |
|
RU2807320C1 |
Изобретение относится к управляющим и регулирующим средствам управления технологическими процессами. Устройство дистанционного управления системой разгрузки подвижной части виброиспытательной установки содержит блок дистанционного управления, снабженный управляющим устройством, соединенным с исполнительным устройством, блок разгрузки и ПЭВМ, связанную с управляющим устройством. Блок дистанционного управления снабжен пневмораспределителем, соединенным с исполнительным устройством и виброиспытательной установкой, блок разгрузки снабжен ручным регулятором давления, усилителем и индикатором, связанным с управляющим устройством. ПЭВМ связана с управляющим устройством с помощью интерфейса Ethernet. Технический результат – дистанционный контроль и управление системой разгрузки виброиспытательной установки. 1 ил.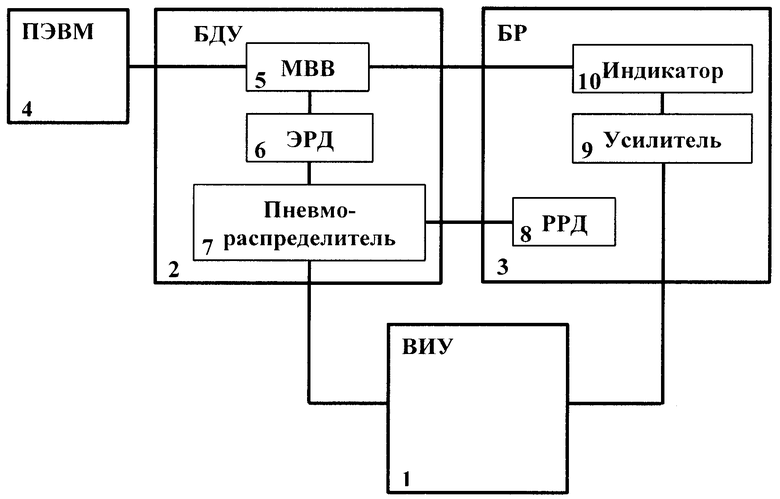
Устройство дистанционного управления системой разгрузки подвижной части виброиспытательной установки, содержащее блок дистанционного управления, снабженный управляющим устройством, соединенным с исполнительным устройством, блок разгрузки и ПЭВМ, связанную с управляющим устройством, отличающееся тем, что блок дистанционного управления снабжен пневмораспределителем, соединенным с исполнительным устройством и виброиспытательной установкой, блок разгрузки снабжен ручным регулятором давления, усилителем и индикатором, связанным с управляющим устройством, ручной регулятор давления связан с пневмораспределителем, усилитель соединен с установкой, исполнительное устройство выполнено в виде электронного регулятора давления, ПЭВМ связана с управляющим устройством с помощью интерфейса Ethernet.
| Пресс для изготовления брикетов из растительного сырья | 1940 |
|
SU63077A1 |
| 0 |
|
SU180856A1 | |
| Устройство для регулирования | 1985 |
|
SU1325408A1 |
| CN 205405247 U, 27.07.2016. | |||

