Область техники, к которой относится изобретение
Настоящее раскрытие относится, в общем, к ручным медицинским сканирующим устройствам и, в частности, к ручному медицинскому сканирующему устройству, выполненному с возможностью ориентирования медицинской информации на дисплее, по меньшей мере частично, на основе захвата пользователем ручного медицинского сканирующего устройства.
Уровень техники
По мере развития медицинских технологий на протяжении многих лет было разработано несколько различных методов визуализации, например, магнитно-резонансная томография (МРТ), компьютерная томография (КТ), рентгенография, флюороскопия, ангиография, ультразвук и т.д., которые позволяют врачам наблюдать анатомические структуры в теле пациента без необходимости хирургического вмешательства. В случае ультразвука ультразвуковые волны излучаются от ультразвуковых датчиков в тело пациента. Ультразвуковые волны частично отражаются от несплошностей (границ раздела), возникающих в тканевых структурах, эритроцитах и других структурах внутри пациента. Эхо-сигналы от отраженных волн принимаются ультразвуковыми датчиками и обрабатываются для получения ультразвукового изображения. Ультразвуковое изображение обычно выводится на дисплей для просмотра врачом. Просмотр отображаемых изображений часто играет неотъемлемую роль во врачебном плане диагностики и лечения.
Раскрытие сущности изобретения
Варианты осуществления настоящего раскрытия обеспечивают усовершенствованные системы и способы ориентирования медицинской информации на дисплее ручного медицинского сканирующего устройства и управления его активированием. В этой связи данное раскрытие предусматривает наличие ручного медицинского сканирующего устройства, оснащенного множеством датчиков, выполненных с возможностью обнаружения кисти руки пользователя, захватывающей ручное медицинское сканирующее устройство. Ручное медицинское сканирующее устройство может быть выполнено с возможностью переключения из низкоэнергетического спящего режима в активный режим в ответ на показания датчиков, указывающих на то, что кисть руки пользователя находится в контакте с ручным медицинским сканирующим устройством. Возможность оставаться в низкоэнергетическом режиме до тех пор, пока кисть руки пользователя не будет обнаружена, выгодным образом продлевает время работы от батареи за счет снижения энергозатрат в периоды, когда ручное медицинское сканирующее устройство не используется. Кроме того, ручное медицинское сканирующее устройство может определять положение кисти руки пользователя на основе показаний датчиков и может ориентировать медицинскую информацию на дисплее на основе определенного положения кисти руки пользователя. Например, ручное медицинское сканирующее устройство может определять положение большого пальца пользователя и может ориентировать медицинскую информацию на дисплее таким образом, чтобы нижняя часть информационного окна находилась на той же стороне, что и большой палец пользователя, когда ручное медицинское сканирующее устройство удерживается пользователем. Во многих случаях предпочтительной для пользователя ориентацией просмотра будет такая ориентация, при которой нижняя часть информационного окна дисплея находится на той же стороне, что и большой палец пользователя. Соответственно, автоматическое ориентирование информационного окна на дисплее таким образом удобно позволяет пользователю взять в руки ручное медицинское сканирующее устройство без учета ориентации самого ручного медицинского сканирующего устройства и с уверенностью в том, что дисплей, тем не менее, будет иметь предпочтительную для пользователя ориентацию просмотра.
В одном варианте осуществления раскрыто устройство ультразвуковой визуализации. Устройство ультразвуковой визуализации содержит корпус, выполненный с возможностью ручного использования, матрицу ультразвуковых преобразователей, соединенную с корпусом и выполненную с возможностью получения ультразвуковых данных (визуализации) при размещении рядом с телом пациента, дисплей, соединенный с корпусом, множество датчиков, распределенных по периферии корпуса и выполненных с возможностью обнаружения того, когда кисть руки оператора расположена вокруг корпуса, и вычислительное устройство, размещенное внутри корпуса. Вычислительное устройство выполнено с возможностью осуществления связи с матрицей ультразвуковых преобразователей, дисплеем и множеством датчиков. Вычислительное устройство выполнено с возможностью отслеживания множества датчиков, определения того, превышает ли показание первого датчика из множества датчиков на первом краю периферии корпуса пороговое значение, задания первого края в качестве основного края на основе, по меньшей мере частично, показания первого датчика, и ориентирования медицинской информации на дисплее таким образом, чтобы основной край находился в нижней части информационного окна дисплея.
В некоторых вариантах осуществления вычислительное устройство также выполнено с возможностью: переключения устройства ультразвуковой визуализации из спящего режима в активный режим в ответ на определение того, что показание первого датчика превышает пороговое значение. В некоторых вариантах осуществления устройство ультразвуковой визуализации в спящем режиме расходует энергию, достаточную только для отслеживания множества датчиков. В некоторых вариантах осуществления вычислительное устройство также выполнено с возможностью: включения дисплея в ответ на переключение устройства ультразвуковой визуализации из спящего режима в активный режим. В некоторых вариантах осуществления вычислительное устройство также выполнено с возможностью: определения того, что первый край захвачен большим пальцем оператора, на основе, по меньшей мере частично, показания первого датчика. В некоторых вариантах осуществления вычислительное устройство также выполнено с возможностью: определения того, что показание второго датчика на втором краю указывает на то, что второй край захвачен пальцем оператора, отличным от большого пальца. В некоторых вариантах осуществления вычислительное устройство также выполнено с возможностью: определения того, что показание третьего датчика на третьем краю указывает на то, что третий край захвачен межпальцевой перепонкой кисти руки оператора. В некоторых вариантах осуществления множество датчиков представляют собой емкостные датчики. В некоторых вариантах осуществления ультразвуковое устройство содержит также акселерометр, причем вычислительное устройство выполнено с возможностью задания первого края в качестве основного края на основе, по меньшей мере частично, показания акселерометра. В некоторых вариантах осуществления вычислительное устройство выполнено с возможностью: активирования матрицы ультразвуковых преобразователей для получения ультразвуковых данных (визуализации).
В одном из вариантов осуществления раскрыт способ работы ручного устройства ультразвуковой визуализации. Способ включает в себя отслеживание, с помощью вычислительного устройства ручного устройства ультразвуковой визуализации, множества датчиков, распределенных по периферии корпуса ручного устройства ультразвуковой визуализации; определение, с помощью вычислительного устройства, того, превышает ли показание первого датчика на первом краю корпуса пороговое значение; задание, с помощью вычислительного устройства, первого края в качестве основного края на основе, по меньшей мере частично, показания первого датчика; и ориентирование, с помощью вычислительного устройства, информационного окна дисплея ручного ультразвукового устройства, содержащего основанные на ультразвуке гемодинамические параметры и/или ультразвуковые изображения, таким образом, чтобы основной край находился в нижней части дисплея.
В некоторых вариантах осуществления способ также включает в себя переключение, с помощью вычислительного устройства, ручного устройства ультразвуковой визуализации из спящего режима в активный режим в ответ на определение того, что показание первого датчика превышает пороговое значение. В некоторых вариантах осуществления задание первого края в качестве основного края, включает в себя определение, с помощью вычислительного устройства, того, что первый край захвачен большим пальцем оператора. В некоторых вариантах осуществления определение того, что первый край захвачен большим пальцем оператора, включает в себя определение того, что показание первого датчика превышает показание второго датчика. В некоторых вариантах осуществления определение того, что первый край захвачен большим пальцем оператора, включает в себя просмотр сохраненного предпочтения в доминировании одной из рук (праворукость/леворукость).
Дополнительные аспекты, особенности и преимущества настоящего раскрытия станут очевидны из следующего подробного описания.
Краткое описание чертежей
Иллюстративные варианты осуществления настоящего раскрытия будут описаны со ссылкой на сопроводительные чертежи:
На фиг. 1А представлен схематический вид сверху ручного медицинского сканирующего устройства в соответствии с аспектами настоящего раскрытия.
На фиг. 1В представлен схематический вид в аксонометрии ручного медицинского сканирующего устройства в соответствии с аспектами настоящего раскрытия.
На фиг. 1С представлен схематический вид сбоку ручного медицинского сканирующего устройства в соответствии с аспектами настоящего раскрытия.
На фиг. 2 представлен схематический вид ручного медицинского сканирующего устройства в соответствии с аспектами настоящего раскрытия.
На фиг. 3А представлен схематический вид сверху ручного медицинского сканирующего устройства, отображающего ультразвуковые данные (визуализации или отслеживания) в информационном окне и удерживаемого в первом захвате, в соответствии с аспектами настоящего раскрытия.
На фиг. 3В представлен схематический вид сверху ручного медицинского сканирующего устройства, отображающего ультразвуковые данные (визуализации или отслеживания) и удерживаемого во втором захвате, в соответствии с аспектами настоящего раскрытия.
На фиг. 4 представлена блок-схема способа в соответствии с аспектами настоящего раскрытия.
На фиг. 5 представлена блок-схема способа в соответствии с аспектами настоящего раскрытия.
Осуществление изобретения
В целях содействия пониманию принципов настоящего раскрытия ниже будут сделаны ссылки на варианты осуществления, проиллюстрированные на чертежах, и для их описания будет использован специальный язык. Тем не менее, должно быть понятно, что не предполагается никакого ограничения объема раскрытия. Любые изменения и дальнейшие модификации описанных устройств, систем и способов, а также любое дальнейшее применение принципов настоящего раскрытия полностью предусмотрены и включены в настоящее раскрытие, как это обычно понятно специалисту в данной области техники, к которой относится раскрытие. В частности, полностью предполагается, что признаки, компоненты и/или этапы, описанные в отношении одного варианта осуществления, могут быть объединены с признаками, компонентами и/или этапами, описанными в отношении других вариантов осуществления настоящего раскрытия. Однако в целях краткости многочисленные итерации этих комбинаций не будут описываться отдельно.
Аспекты настоящего раскрытия относятся к ручному медицинскому сканирующему устройству, содержащему электронный поворотный дисплей на верхней поверхности ручного медицинского сканирующего устройства и активный компонент медицинского сканера на нижней поверхности ручного медицинского сканирующего устройства. Компонент медицинского сканера может находиться в контакте с пациентом во время использования. Ручное медицинское сканирующее устройство может иметь форму квадрата с закругленными углами (как показано, например, на фиг. 1А). Боковые поверхности, также называемые в данном документе краями, ручного медицинского сканирующего устройства могут быть достаточно большими, а другие размеры - достаточно малыми, так что наиболее естественным способом удерживать устройство является его удержание за боковые поверхности. Когда ручное медицинское сканирующее устройство удерживают таким образом, дисплей может быть виден пользователю, в то время как компонент медицинского сканера на нижней поверхности прижимается к телу пациента. Таким образом, кисть руки пользователя может частично охватывать ручное медицинское сканирующее устройство таким образом, что большой палец, межпальцевая перепонка и указательный палец пользователя касаются трех из четырех сторон ручного медицинского сканирующего устройства, образуя удобный захват. В таком захвате можно сказать, что межпальцевая перепонка кисти руки пользователя находится на заключенном краю, т.е. краю, заключенном между краем, захваченным большим пальцем пользователя, и краем, захваченным указательным пальцем пользователя, находящимся напротив края, захваченного большим пальцем пользователя.
Один из аспектов данного раскрытия относится к автоматическому ориентированию информационного окна дисплея таким образом, чтобы отображаемый текст/изображения были понятны пользователю, держащему ручное медицинское сканирующее устройство во время его использования, например, во время проведения ультразвукового сканирования. В этом отношении ручное медицинское сканирующее устройство может определить, какой край должен находиться в нижней части поворотного дисплея. Край, который должен находиться в нижней части поворотного дисплея (информационного окна), что определено ручным медицинским сканирующим устройством, называется в данном документе основным краем. Ручное медицинское сканирующее устройство может ориентировать поворотный дисплей таким образом, чтобы основной край находился в нижней части поворотного дисплея. В настоящем документе описаны несколько методик определения основного края, например, на основе захвата пользователем и/или показания акселерометра.
Например, в типичном захвате большой палец пользователя находится на краю, который должен находиться в нижней части поворотного дисплея. Это верно независимо от того, держит ли пользователь ручное медицинское сканирующее устройство в левой или правой руке, а также верно независимо от того, сканирует ли пользователь себя или другого человека. То, что край, захваченный большим пальцем пользователя, должен находиться в нижней части поворотного дисплея также верно, независимо от того, находится ли устройство в контакте с пациентом, как во время визуализации с помощью ручного медицинского сканирующего устройства, или его удерживают в воздухе для удобного просмотра результатов после визуализации. Таким образом, ручное медицинское сканирующее устройство может идентифицировать основной край посредством определения того, какой край захвачен большим пальцем пользователя. Ручное медицинское сканирующее устройство может выгодно ориентировать поворотный дисплей таким образом, чтобы край, захваченный большим пальцем пользователя, например, основной край, находился в нижней части дисплея. Эти и другие аспекты будут более подробно рассмотрены ниже.
На фиг. 1А-1С изображены различные схематические изображения ручного медицинского сканирующего устройства 102 в соответствии с аспектами настоящего раскрытия. Как проиллюстрировано, ручное медицинское сканирующее устройство 102 может включать в себя множество датчиков 104, сканирующий (визуализирующий) элемент 110, дисплей 112, контрольную метку 116 и корпус 118, имеющий длину 120, ширину 121 и глубину 122. Множество датчиков 104 может быть размещено внутри и распределено по периферии корпуса 118. Дисплей 112 и визуализирующий элемент 110 могут быть расположены на верхней и нижней сторонах ручного медицинского сканирующего устройства 102, соответственно. Дополнительные аспекты ручного медицинского сканирующего устройства 102 и его различные признаки будут более подробно описаны ниже.
Ручное медицинское сканирующее устройство 102 может быть выполнено с возможностью получения медицинских данных или изображений анатомии пациента с помощью сканирующего (визуализирующего) элемента 110. Например, сканирующий (визуализирующий) элемент 110 может быть помещен в контакт с кожей пациента или в непосредственной близости от нее, поверх области, подлежащей исследованию или визуализации. Сканирующий элемент 110 может излучать один или несколько видов энергии и принимать обратно энергию, отраженную от структур тела пациента. Эта отраженная энергия может быть использована для формирования репрезентативных данных (например, изображений) анатомии пациента. В этом отношении сканирующий элемент 110 может содержать инфракрасный сканер, ультразвуковой сканер, элемент оптической визуализации, сканер оптической когерентной томографии (ОКТ), сканер компьютерной томографии (КТ), рентгеновский сканер или их комбинации. Соответственно, ручное медицинское сканирующее устройство 102 может получать любую комбинацию тепловых данных, ультразвуковых данных, оптических данных, изображений ОКТ, изображений КТ и рентгеновских изображений. В частности, когда сканирующий элемент 110 содержит ультразвуковой сканер, то сканирующий элемент 110 может содержать один или несколько ультразвуковых преобразователей, выполненных с возможностью излучения ультразвуковых волн в ткани тела пациента. Ультразвуковые волны могут частично отражаться от несплошностей, возникающих в тканевых структурах, эритроцитах и других структурах внутри пациента. Эхо-сигналы от отраженных ультразвуковых волн могут быть приняты ультразвуковыми преобразователями и обработаны ручным медицинским сканирующим устройством 102, в частности процессором 206, для получения гемодинамического параметра и/или создания ультразвукового изображения на основе полученных ультразвуковых данных. В этом отношении ручное медицинское сканирующее устройство 102 может представлять собой ультразвуковое (визуализирующее) устройство.
Ультразвуковой элемент 110 может включать в себя один или несколько ультразвуковых преобразователей. Например, в матрице может быть расположено множество ультразвуковых преобразователей. Например, матрица ультразвуковых преобразователей может включать в себя любое подходящее количество отдельных преобразователей от 2 до 1000, включая в себя такие значения, как 2 преобразователя, 4 преобразователя, 36 преобразователей, 64 преобразователя, 128 преобразователей, 500 преобразователей, 812 преобразователей и/или другие значения, как большие, так и меньшие. Ультразвуковой элемент 110 может представлять собой любую подходящую конфигурацию, например, фазированную решетку (матрицу), включающую в себя плоскую решетку, криволинейную решетку и т.д. Например, ультразвуковой элемент 110 может представлять собой одномерную решетку (матрицу), 1,х-мерную решетку, такую как 1,5-мерная решетка, или двухмерную решетку, в некоторых случаях. В этом отношении ультразвуковой преобразователь или матрица 110 преобразователей могут быть выполнены с возможностью получения одномерных, двумерных и/или трехмерных изображений анатомии пациента. Ультразвуковой элемент 110 может представлять собой решетку (матрицу), включающую в себя один или несколько сегментов ультразвуковых элементов (например, один или несколько рядов, одну или несколько колонок и/или одну или несколько ориентаций), которыми можно управлять и которые можно активировать равномерно или независимо друг от друга. Ультразвуковой элемент 110 может включать в себя любой подходящий тип преобразователя, в том числе пьезоэлектрический микрообработанный ультразвуковой преобразователь (ПМУП), емкостный микрообработанный ультразвуковой преобразователь (ЕМУП), монокристалл, цирконат титаната свинца (ЦТС), композитный ЦТС, другой подходящий тип преобразователя и/или его комбинации.
Полученные медицинские данные и полученные на их основе гемодинамические параметры или изображения, например, ультразвуковые изображения анатомии пациента, могут быть выведены для просмотра на дисплей 112. В некоторых случаях ручное медицинское сканирующее устройство 102 может анализировать полученные данные (изображения) и выводить результаты на дисплей 112. Например, ручное медицинское сканирующее устройство 102 может выделять области, представляющие интерес, на изображениях, может выводить на дисплей измерения анатомических структур на изображениях, может выводить на дисплей гемодинамические значения (такие как фракция выброса или сердечный выброс) и/или их изменение во времени (временная диаграмма), может давать рекомендации, основанные на значениях или изображениях, или их комбинациях. Выходные данные могут накладываться на изображения, к которым они относятся, или могут быть отображены отдельно.
Ручное медицинское сканирующее устройство 102 также может быть выполнено с возможностью отображения других медицинских данных в информационном окне дисплея, таких как план лечения, график приема лекарств, результаты анализов, график назначений, отчет о ходе лечения, архивные изображения, история болезни или их комбинации. Такие медицинские данные могут быть сохранены в самом ручном медицинском сканирующем устройстве 102 или могут быть сохранены дистанционно, например, в больничной системе записи. В этом отношении ручное медицинское сканирующее устройство 102 может содержать радиочастотный приемопередатчик, облегчающий беспроводную связь с больничной системой записи, с тем чтобы пользователь мог получить доступ к дистанционно хранящимся медицинским данным с помощью ручного медицинского сканирующего устройства 102.
Пользователь ручного медицинского сканирующего устройства 102 может вводить инструкции по управлению работой ручного медицинского сканирующего устройства 102 с помощью одной или нескольких кнопок и/или с помощью дисплея 112. В этом отношении дисплей 112 может содержать емкостной или резистивный сенсорный экран и служить в качестве графического интерфейса пользователя (ГИП). Пользователь может давать на дисплее 112 сенсорные инструкции (т.е. на основе прикосновений) для переключения между различными экранами и главным экраном, для увеличения масштаба одной или нескольких областей временной диаграммы, изображения, например, ультразвукового, для ввода одного или нескольких предпочтений, например, предпочтения в доминировании одной из рук (праворукость/леворукость), для ввода информации, например, возраста пациента, его веса, пола и т.д., для доступа к медицинским данным, для активации или деактивации сканирования с помощью сканирующего элемента 110, или их комбинаций.
Ручное медицинское сканирующее устройство 102 может иметь размер и форму для ручного использования. Несмотря на различные иллюстрации, на которых изображен периметр в форме квадрата или закругленного квадрата, ручное медицинское сканирующее устройство 102 может в некоторых случаях иметь периметр в форме круга, в форме треугольника, в форме прямоугольника, в форме пятиугольника, в форме шестиугольника, или некоторые другие виды периметра. Корпус 118 может иметь длину 120, ширину 121 и глубину 122, подходящие для обеспечения возможности пользователю надежно сжимать рукой или обеими руками ручное медицинское сканирующее устройство 102 во время проведения операций по визуализации и/или других операций. В качестве конкретного примера, но не имеющего ограничительного характера, корпус 118 может иметь длину 120 семь сантиметров, ширину 121 семь сантиметров и толщину два сантиметра. Такие размеры позволили бы выгодным образом использовать ручное медицинское сканирующее устройство 102 с помощью одной руки практически всем пользователям. Пользователь может осуществлять захват ручного медицинского сканирующего устройства 102 одной рукой, за счет захвата ручного медицинского сканирующего устройства 102 большим пальцем на одной боковой поверхности корпуса 118 и указательным пальцем на противоположной боковой поверхности корпуса 118. Боковые поверхности корпуса 118 могут быть названы краями.
Датчики 104 внутри корпуса 118 могут быть выполнены с возможностью обнаружения момента захвата ручного медицинского сканирующего устройства 102 рукой пользователя. В этом отношении датчики 104 могут быть размещены внутри корпуса 118 и распределены по его периферии. Датчики 104 могут быть расположены на боковых поверхностях корпуса 118, внутри материала корпуса, составляющего боковые поверхности корпуса 118, непосредственно за материалом корпуса, составляющим боковые поверхности корпуса 118, или возможны комбинации указанных вариантов. Соответственно, датчики 104 могут находиться в непосредственном контакте с кожей кисти руки пользователя или могут быть отделены от непосредственного контакта с кожей пользователя слоем материала корпуса. В некоторых случаях боковые поверхности корпуса 118 могут содержать одну или несколько областей с уменьшенной толщиной материала корпуса по сравнению с другими областями корпуса 118. Датчики 104 могут быть расположены в этих областях с уменьшенной толщиной материала корпуса, чтобы уменьшить влияние материала корпуса на способность датчиков 104 обнаруживать присутствие кисти руки пользователя вокруг корпуса 118. Датчики 104 могут быть подключены с помощью одной гибкой схемы, расположенной внутри корпуса 118 и обернутой вокруг его периферии, или же датчики 104 могут быть независимыми блоками. Хотя на фиг. 1В и 1С проиллюстрированы два датчика 104 на каждой боковой поверхности корпуса 118, ручное медицинское сканирующее устройство 102 может содержать один датчик 104 на каждой боковой поверхности, три датчика 104 на каждой боковой поверхности, четыре датчика 104 на каждой боковой поверхности, пять датчиков 104 на каждой боковой поверхности, иное количество датчиков 104 на каждой боковой поверхности, или возможны комбинации указанных вариантов. В некоторых случаях количество датчиков может быть выбрано таким образом, чтобы обеспечить возможность обнаружения по всей длине боковой поверхности. В число датчиков 104 могут входить тепловые датчики, емкостные датчики, импедансные датчики, считыватели отпечатков пальцев или их комбинации.
Ручное медицинское сканирующее устройство 102 может быть выполнено с возможностью нахождения в спящем режиме до тех пор, пока не будет обнаружен захват пользователем. Спящий режим может быть низкоэнергетическим режимом, выполненным с возможностью выгодного сохранения времени работы от батареи за счет снижения энергозатрат в периоды, когда ручное медицинское сканирующее устройство 102 не используется. В спящем режиме ручное медицинское сканирующее устройство 102 может расходовать энергию, достаточную только для отслеживания датчиков 104. Соответственно, в некоторых случаях время работы от батареи может быть увеличено до одного, двух, трех и более месяцев, пока ручное медицинское сканирующее устройство 102 находится в спящем режиме. Ручное медицинское сканирующее устройство 102 может быть выполнено с возможностью входа в спящий режим, если истекло пороговое количество времени, в течение которого датчики 104 не обнаруживают кисть руки пользователя. Например, ручное медицинское сканирующее устройство 102 может войти в спящий режим после отсутствия контакта в течение одной секунды, двух секунд, пяти секунд, десяти секунд, тридцати секунд, одной минуты, двух минут, пяти минут, десяти минут или в течение другого количества времени.
Скорость перехода ручного медицинского сканирующего устройства 102 в спящий режим может варьироваться в зависимости от одного или нескольких параметров устройства, например, времени работы от батареи. Например, ручное медицинское сканирующее устройство 102 может быстрее перейти в спящий режим, если время работы от батареи меньше. В некоторых случаях скорость перехода ручного медицинского сканирующего устройства 102 в спящий режим может меняться в реальном времени в зависимости от времени работы от батареи, так что любое изменение во времени работы от батареи приведет к изменению скорости перехода ручного медицинского сканирующего устройства 102 в спящий режим. В других случаях могут быть заданы одно или несколько пороговых значений, причем прохождение порогового значения времени работы от батареи приводит к изменению скорости перехода ручного медицинского сканирующего устройства 102 в спящий режим.
Ручное медицинское сканирующее устройство 102 может быть выполнено с возможностью переключения из спящего режима в активный режим в ответ на обнаружение датчиками 104 того, что пользователь захватил ручное медицинское сканирующее устройство 102. Активный режим может быть режимом, в котором активны дополнительные возможности устройства. Например, в активном режиме пользователь может иметь возможность вводить или изменять предпочтения, например, предпочтения в доминировании одной из рук или скорости входа в спящий режим или активный режим, может иметь возможность просматривать медицинские данные, сохраненные локально и/или удаленно, и т.д. В некоторых случаях активный режим может быть режимом, в котором активен весь спектр возможностей устройства. Ручное медицинское сканирующее устройство 102 может быть выполнено с возможностью переключения из спящего режима в активный режим только после того, как пользователь возьмет ручное медицинское сканирующее устройство 102 на определенное время, например, дольше, чем на мгновение, на полсекунды, на одну секунду, на две секунды, на три секунды, на четыре секунды, на пять секунд или на некоторый другой промежуток времени. Как описано выше, скорость переключения ручного медицинского сканирующего устройства 102 из спящего режима в активный режим может варьироваться в зависимости от одного или нескольких показателей устройства, например, времени работы от батареи. Например, при меньшем времени работы от батареи ручное медицинское сканирующее устройство 102 может перейти в активный режим медленнее. В некоторых случаях скорость перехода ручного медицинского сканирующего устройства 102 в активный режим может меняться в реальном времени в зависимости от времени работы от батареи, так чтобы любое изменение времени работы от батареи приводило к изменению скорости перехода ручного медицинского сканирующего устройства 102 в активный режим. В других случаях может быть задано одно или несколько пороговых значений, причем прохождение порогового значения времени работы от батареи приводит к изменению скорости перехода ручного медицинского сканирующего устройства 102 в активный режим.
Ручное медицинское сканирующее устройство 102 может переключаться из спящего режима в активный режим, когда обнаружен любой захват, независимо от того, можно ли определить конкретный захват, например, захват противоположных боковых поверхностей большим и указательным пальцем. В этом отношении ручное медицинское сканирующее устройство 102 может переключаться из спящего режима в активный режим, когда датчики 104 на любой боковой поверхности или любой комбинации боковых поверхностей выдают показания, свидетельствующие о контакте кисти руки пользователя с боковой поверхностью или поверхностями. Пользователь может первоначально взять в руки ручное медицинское сканирующее устройство 102 таким образом, что невозможно определить конкретный захват. Например, в некоторых случаях, когда пользователь быстро берет в руки ручное медицинское сканирующее устройство 102, используя случайный или неустойчивый захват, который может быть изменен или отрегулирован один или несколько раз до того, как пользователь придет к удобному рабочему захвату, конкретный захват может быть не идентифицирован. В таких случаях было бы целесообразно переключить ручное медицинское сканирующее устройство 102 из спящего режима в активный режим еще до того, как будет определен конкретный захват, чтобы пользователь имел доступ к возможностям устройства в активном режиме, как только он остановится на конкретном захвате.
В других случаях, например, когда ручное медицинское сканирующее устройство 102 имеет, в частности, малый уровень заряда батареи, ручное медицинское сканирующее устройство 102 может переключиться из спящего режима в активный режим только в том случае, если ручное медицинское сканирующее устройство 102 обнаружит конкретный захват или обнаружит контакт кисти руки пользователя с противоположными боковыми поверхностями, даже если конкретный захват не может быть идентифицирован, т.е. например, какой именно палец находится в контакте с какой-либо поверхностью. Переход в активный режим таким образом позволит ручному медицинскому сканирующему устройству 102 дольше оставаться в спящем режиме и, следовательно, выгодно сохранить время работы от батареи и ограничить риск разрядки батареи во время использования ручного медицинского сканирующего устройства 102.
Ручное медицинское сканирующее устройство 102 может, даже в спящем режиме, в некоторых случаях отслеживать один или несколько показателей устройства, таких как время работы от батареи, и может изменить свое поведение на основе текущих показателей. Например, как предлагалось выше, при обнаружении любого захвата ручное медицинское сканирующее устройство 102 может переключиться из спящего режима в активный режим, независимо от того, можно ли определить конкретный захват, когда у ручного медицинского сканирующего устройства 102 немалый уровень заряда батареи, и может переключиться из спящего режима в активный режим только при обнаружении конкретного захвата или контакта пользователя с противоположными боковыми поверхностями, когда у ручного медицинского сканирующего устройства 102 малый уровень заряда батареи. Время работы от батареи может быть малым, если он опускается ниже 50%, ниже 40%, ниже 30%, ниже 25%, ниже 20%, ниже 15%, ниже 10%, ниже 5%, в пределах 5% от среднего количества, затраченного на процедуру визуализации, в пределах 5% от среднего количества, затраченного во время одного использования или их комбинаций.
Наличие или отсутствие контакта кисти руки пользователя с ручным медицинским сканирующим устройством 102 может быть определено путем сравнения показаний датчиков 104 с пороговым значением, с сохраненным профилем или с их комбинациями. Например, ручное медицинское сканирующее устройство 102 может определить, что кисть руки пользователя находится в контакте с ручным медицинским сканирующим устройством 102, и может перейти из спящего режима в активный режим в ответ на определение того, что показание емкости превышает пороговое значение, на определение того, что показание импеданса превышает пороговое значение, на определение того, что показание температуры превышает пороговое значение, на определение того, что обнаруженный отпечаток пальца соответствует отпечатку пальца, сохраненному в профиле пользователя, или в ответ на комбинации указанных вариантов.
Как только пользователь возьмет ручное медицинское сканирующее устройство 102, он может захотеть выполнить операцию визуализации, просмотреть медицинские данные и т.д. Эти действия могут включать в себя наблюдение и взаимодействие пользователя с дисплеем 112, на котором отображается информационное окно, включающее в себя гемодинамические параметры, полученные с помощью ультразвука, и/или ультразвуковые изображения. Во многих случаях предпочтительной пользовательской ориентацией просмотра будет ориентация, при которой нижняя часть информационного окна дисплея 112 находится на той же стороне, что и большой палец пользователя. В смысле, в котором указанный термин используется в настоящем документе, нижняя часть дисплея 112 относится не к нижней части физического аппаратного обеспечения, образующего дисплей 112, а к той стороне дисплея 112, которая соответствует нижней части любого контента, отображаемого на дисплее 112, как это определяется обычной ориентацией просмотра указанного контента. Например, в случае английского текста, отображаемого на дисплее 112, обычной ориентацией просмотра является такая, при которой англоязычный пользователь может читать и понимать текст, перебирая слово за словом елевой стороны пользователя в правую сторону пользователя во время просмотра текста на дисплее 112. В данном примере в случае многострочного текста нижняя часть контента - это последняя строка текста, а верхняя часть контента - это первая строка текста, когда текст отображается в обычной ориентации просмотра. В данном примере сторона дисплея 112, которая находится ближе всего к последней строке текста и параллельна последней строке текста, является той стороной дисплея, которая соответствует нижней части текста и, следовательно, является нижней частью дисплея 112.
Ручное медицинское сканирующее устройство 102 может быть выполнено с возможностью определения положения кисти руки пользователя вокруг ручного медицинского сканирующего устройства 102, например, определения конкретного захвата пользователя на ручном медицинском сканирующем устройстве 102, и ориентирования дисплея 112 на основе определенного положения кисти руки. В смысле, используемом в настоящем документе, термин ориентирование дисплея 112 относится не к ориентированию физического аппаратного обеспечения, составляющего дисплей 112, а к ориентированию контента, отображаемого на дисплее 112. В частности, но без ограничений, ручное медицинское сканирующее устройство 102 может быть выполнено с возможностью автоматического определения положения большого пальца руки пользователя и автоматического ориентирования дисплея 112 таким образом, чтобы нижняя часть дисплея 112 находилась на той же стороне, что и большой палец руки пользователя. Учитывая, что предпочтительной для пользователя является ориентация просмотра, при которой нижняя часть дисплея 112 находится на той же стороне, что и большой палец руки пользователя, автоматическое ориентирование дисплея 112 таким образом удобно позволяет пользователю взять в руки ручное медицинское сканирующее устройство 102 без учета ориентации самого ручного медицинского сканирующего устройства 102 и с уверенностью в том, что дисплей 112 все же будет находиться в предпочтительной для пользователя ориентации просмотра.
Ручное медицинское сканирующее устройство 102 может определять положение кисти руки пользователя, по меньшей мере частично, на основе показаний датчиков 104. В некоторых случаях положение кисти руки пользователя может быть определено, по меньшей мере частично, на основе сравнения показаний датчиков 104 с одним или несколькими пороговыми значениями, заданными для пальцев руки пользователя. Например, показания датчиков 104 можно сравнить с пороговым значением, заданным для большого пальца пользователя, с пороговым значением, заданным для указательного пальца пользователя, с пороговым значением, заданным для межпальцевой перепонки между большим и указательным пальцами пользователя, или возможны комбинации указанных вариантов. Данные пороговые значения могут быть заданы в качестве пороговых значений для индивидуальных показаний датчиков и/или в качестве пороговых значений для показаний группы датчиков 104, например группы датчиков 104, состоящей из датчиков 104, расположенных на заданной боковой поверхности корпуса 118. В этом отношении ручное медицинское сканирующее устройство 102 может определять, что большой палец пользователя находится в контакте с боковой поверхностью корпуса 118, когда либо групповое показание, либо одно или несколько индивидуальных показаний датчиков 104, расположенных на боковой поверхности, превышают пороговое значение, заданное для большого пальца пользователя. Положения указательного пальца пользователя и межпальцевой перепонки могут быть определены таким же образом. Пороговые значения могут быть значениями температуры, значениями емкости, значениями импеданса, отпечатками пальцев или их комбинациями. Пороговые значения могут храниться в самом ручном медицинском сканирующем устройстве 102, например в памяти ручного медицинского сканирующего устройства 102, или дистанционно.
Ручное медицинское сканирующее устройство 102 может определять положение кисти руки пользователя путем сравнения показаний двух или более датчиков 104 друг с другом. Например, когда показания датчиков 104 показывают, что кисть руки пользователя находится в контакте с противоположными боковыми поверхностями корпуса 118, ручное медицинское сканирующее устройство 102 может определять, что боковая поверхность, показания датчиков 104 которой имеют наибольшие значения, захвачена большим пальцем пользователя, в то время как противоположная боковая поверхность захвачена указательным пальцем пользователя. Боковая поверхность, определенная как захваченная большим пальцем пользователя, может быть боковой поверхностью с наибольшими значениями показаний одного датчика или боковой поверхностью с наибольшими значениями показаний группы датчиков.
В некоторых случаях ручное медицинское сканирующее устройство 102 может учитывать длину, ширину, площадь или их комбинации, группы датчиков 104 с положительными показаниями на боковой поверхности корпуса 118 для определения положения кисти руки пользователя на ручном медицинском сканирующем устройстве 102. Группа с положительными показаниями может представлять собой группу датчиков 104, показания которых положительны для контакта с пользователем. Положение кисти руки пользователя может быть определено путем сравнения длины, ширины и площади группы датчиков 104 с положительными показаниями с длиной, шириной и площадью пороговых значений, заданных для групп с положительными показаниями, указывающих наличие контакта с большим пальцем пользователя, указательным пальцем или межпальцевой перепонкой. Когда группа с положительными показаниями превышает заданное пороговое значение, ручное медицинское сканирующее устройство 102 может определить, что боковая поверхность, на которой расположена группа с положительными показаниями, захвачена той частью кисти руки пользователя, которая соответствует превышенному пороговому значению. Положение кисти руки пользователя может быть также определено путем сравнения длины, ширины и площади группы датчиков 104 с положительными показаниями, расположенной на одной боковой поверхности, с длиной, шириной и площадью группы датчиков 104 с положительными показаниями, расположенной на другой боковой поверхности. Например, при обнаружении групп с положительными показаниями на противоположных боковых поверхностях корпуса 118, группа с положительными показаниями с наибольшей площадью может быть определена, как захваченная большим пальцем пользователя.
В некоторых случаях, при обнаружении контакта на противоположных боковых поверхностях корпуса 118, ручное медицинское сканирующее устройство 102 может предположить, что одна боковая поверхность захвачена указательным пальцем пользователя, а противоположная боковая поверхность захвачена большим пальцем пользователя. В таких обстоятельствах ручное медицинское сканирующее устройство 102 может просто определить, например, с помощью описанных выше методик, какая боковая поверхность захвачена большим пальцем пользователя, и сориентировать дисплей соответствующим образом.
В других случаях, однако, контакт может быть обнаружен только на смежных боковых поверхностях, а не на противоположных. При обнаружении контакта на смежных боковых поверхностях ручное медицинское сканирующее устройство 102 может предположить, что смежные боковые поверхности захвачены большим пальцем пользователя на одной боковой поверхности и межпальцевой перепонкой пользователя на другой боковой поверхности. Для того чтобы определить, какая боковая поверхность захвачена большим пальцем пользователя, ручное медицинское сканирующее устройство 102 может использовать предпочтение в доминировании одной из рук, сохраненное на ручном медицинском сканирующем устройстве 102 или сохраненное дистанционно. Если предпочтение в доминировании одной из рук указывает на то, что пользователь предпочитает держать ручное медицинское сканирующее устройство 102 в правой руке, то ручное медицинское сканирующее устройство 102 может определить, что захваченная боковая поверхность, которая будет наиболее удаленной по часовой стрелке по отношению к другой захваченной боковой поверхности при просмотре ручного медицинского сканирующего устройства 102 сверху (как на фиг. 1А), является боковой поверхностью, захваченной большим пальцем пользователя. Аналогичным образом, если предпочтение в доминировании одной из рук указывает на то, что пользователь предпочитает держать ручное медицинское сканирующее устройство 102 в левой руке, то ручное медицинское сканирующее устройство 102 может определить, что захваченная боковая поверхность, которая будет наиболее удаленной против часовой стрелки по отношению к другой захваченной боковой поверхности при просмотре ручного медицинского сканирующего устройства 102 сверху (как на фиг. 1А), является боковой поверхностью, захваченной большим пальцем пользователя.
В других случаях ручное медицинское сканирующее устройство 102 может не иметь возможности определять положение большого пальца пользователя. В этом случае ручное медицинское сканирующее устройство 102 может ориентировать дисплей 112 на основе информации, получаемой от акселерометра. Акселерометр может представлять собой трехосный акселерометр, установленный в известном месте в ручном медицинском сканирующем устройстве 102. Например, акселерометр может быть установлен таким образом, чтобы поверхность дисплея 112 была параллельна плоскости XY акселерометра, а ось +Z акселерометра была перпендикулярна нижней поверхности ручного медицинского сканирующего устройства 102. Ручное медицинское сканирующее устройство 102 может задавать основной край в соответствии со знаками компонент X и Y вектора силы тяжести, выбирая одну из 4 сторон из картирования +X/+Y, +X/-Y, -X/+Y, -X/-Y. Если вектор силы тяжести меньше минимального удельного порогового значения градусов от оси +Z, то основной край не может быть определен по показаниям акселерометра. В некоторых вариантах осуществления устройство 102 может включать в себя гироскоп в дополнение к акселерометру или вместо него.
Дисплей 112 может иметь ориентацию по умолчанию, а ручное медицинское сканирующее устройство 102 может ориентировать дисплей 112 в ориентацию по умолчанию, когда захват пользователя не может быть определен и/или показания акселерометра недостаточны для того, чтобы информировать об ориентации дисплея 112. Для удобства пользователя на корпусе 118 может быть расположена контрольная метка 116. Пользователь может иметь возможность определить, даже если ручное медицинское сканирующее устройство 102 находится в спящем режиме, ориентацию дисплея 112 по умолчанию на основе указанной контрольной метки 116. Например, пользователь может знать, что нижняя часть дисплея 112 находится на противоположной стороне дисплея 112 от контрольной метки 116, если дисплей 112 находится в ориентации по умолчанию, или наоборот. Соответственно, пользователь может держать ручное медицинское сканирующее устройство 102 так, чтобы ориентация по умолчанию была предпочтительной для пользователя ориентацией просмотра. Включение контрольной метки 116 может выгодным образом уменьшить разочарование пользователя в случае сбоя одного или нескольких процессов ориентирования. Контрольная метка 116 может иметь такой размер, чтобы быть заметной для справочных целей. Контрольная метка 116 может включать в себя изображение, логотип, бренд, символ, функциональный элемент, динамик, цифру, букву, буквенно-цифровой текст, подпись или их комбинации. В некоторых случаях контрольная метка 116 может быть тактильной, чтобы облегчить ее определение пользователям с ослабленным зрением.
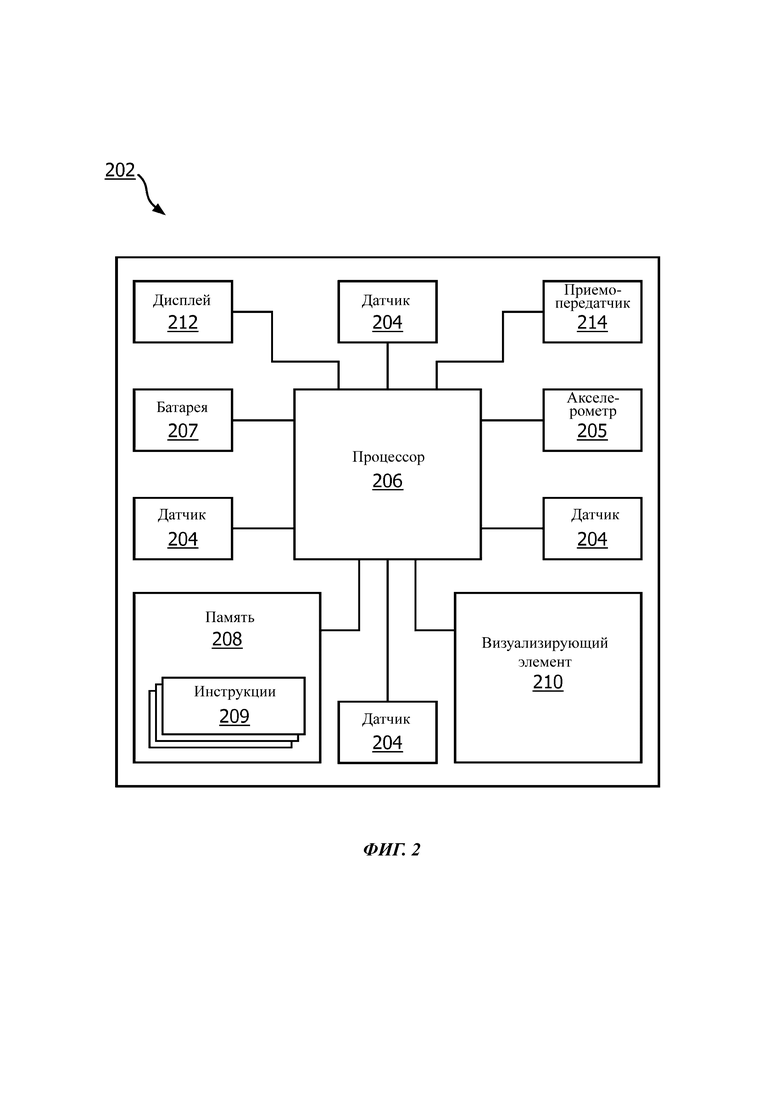
На фиг. 2 представлен схематический вид ручного медицинского сканирующего устройства 202, в соответствии с аспектами настоящего раскрытия. Ручное медицинское сканирующее устройство 202 может включать в себя множество датчиков 204, акселерометр 205, батарею 207, память 208 с сохраненным в ней множеством инструкций 209, сканирующий элемент 210, дисплей 212 и радиочастотный приемопередатчик 214, каждый из которых взаимодействует с процессором 206.
Датчики 204 могут передавать показания на процессор 206, который может определять на основе показаний, находится ли кисть руки пользователя в контакте с ручным медицинским сканирующим устройством 202. Процессор 206 может также определять положение кисти руки пользователя вокруг ручного медицинского сканирующего устройства 202 на основе указанных показаний. Например, процессор 206 может сравнивать показания датчиков 204 с одним или несколькими пороговыми значениями, сохраненными в памяти 208, или может сравнивать показания различных датчиков 204 для определения положения кисти руки пользователя. На основе положения кисти руки пользователя или на основе показаний акселерометра 205, процессор 206 может изменить ориентацию дисплея 212. Процессор 206 может принимать данные визуализации от сканирующего (визуализирующего) элемента 210 и выходные изображения (в том числе связанные с медицинскими данными) на дисплей 212. Процессор 206 может также принимать данные ввода пользователя через дисплей 212. Например, процессор 206 может использовать радиочастотный приемопередатчик 214 для получения дистанционно сохраненных медицинских данных в ответ на команду, введенную пользователем через дисплей 212. Память 208 может хранить медицинские данные, предпочтения в доминировании одной из рук, пороговые значения, профили пользователей, данные отпечатков пальцев, а также множество инструкций 209 для выполнения процессором, например, алгоритмы ориентирования дисплея.
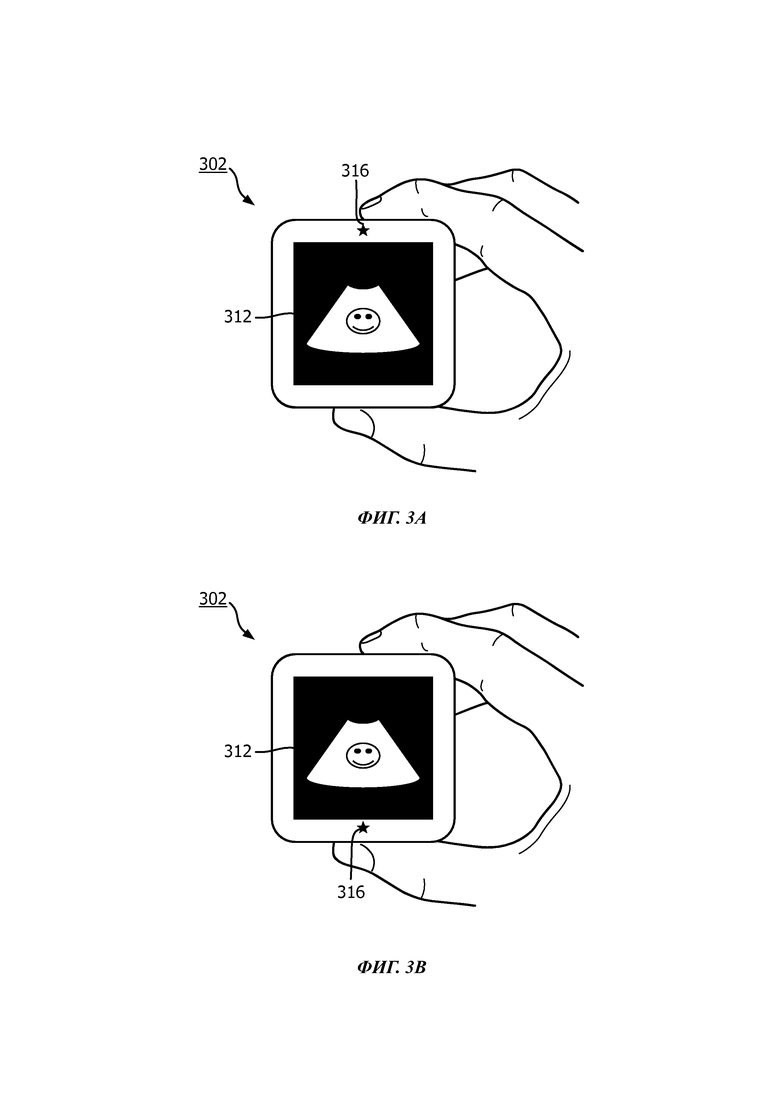
На фиг. 3А и 3В представлены схематический виды ручного медицинского сканирующего устройства 302, содержащего контрольную метку 316 и дисплей 312, захваченный пользователем. На фиг. 3А и 3В показан пользователь, захватывающий ручное медицинское сканирующее устройство 302, большим пальцем на одной боковой поверхности и указательным пальцем на другой боковой поверхности, противоположной той, которая захвачена большим пальцем. Несмотря на то, что пользователь показан захватывающим ручное медицинское сканирующее устройство 302 в основном большим и указательным пальцами, в некоторых случаях пользователь может использовать более надежный захват за счет соприкосновения межпальцевой перепонки с заключенным краем, расположенным между противоположными краями, захваченными большим и указательным пальцами. На каждой фигуре дисплей 312 отображает ультразвуковое изображение и показан ориентированным таким образом, что нижняя часть дисплея 312 находится на той же стороне, что и большой палец пользователя; однако, как видно из изменения положения контрольной метки 316, само ручное медицинское сканирующее устройство 302 повернуто на 180 градусов от положения на фиг. 3А к положению на фиг. 3В. Это сделано для того, чтобы проиллюстрировать способность ручного медицинского сканирующего устройства 302 ориентировать дисплей 312 на основе захвата пользователя и независимо от ориентации самого ручного медицинского сканирующего устройства 302. При изменении захвата пользователя меняется и ориентация дисплея. До тех пор, пока захват пользователя различим, дисплей 312 будет автоматически ориентирован в соответствии с предпочтительной для пользователя ориентацией просмотра. Соответственно, пользователь может неоднократно брать в руки и класть обратно ручное медицинское сканирующее устройство 302, не отвлекаясь на отслеживание ориентации самого ручного медицинского сканирующего устройства 302.
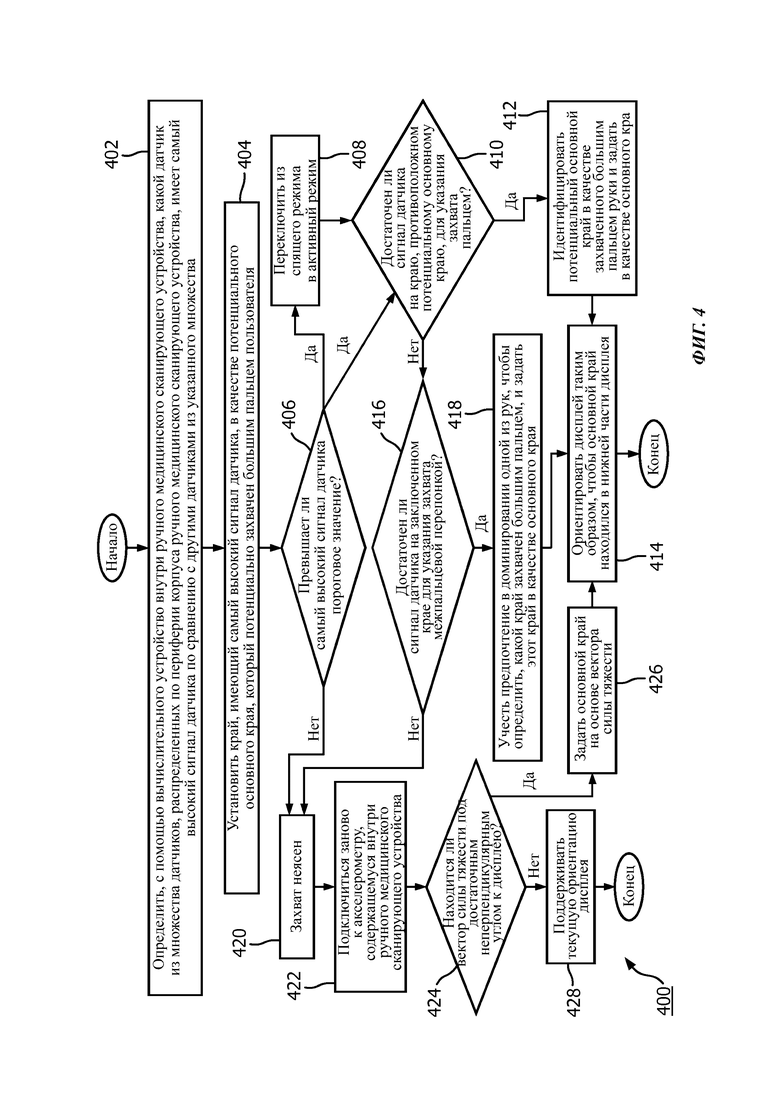
На фиг. 4, описан способ 400. Способ 400 может быть реализован любым из описанных в данном документе ручных медицинских сканирующих устройств, например, ручными медицинскими сканирующими устройствами 102, 202 и 302. Способ начинается с этапа 402, на котором вычислительное устройство внутри ручного медицинского сканирующего устройства определяет, какой датчик из множества датчиков, распределенных по периферии корпуса ручного медицинского сканирующего устройства, имеет самый высокий сигнал датчика по сравнению с другими датчиками из указанного множества. На этапе 404 край, имеющий самый высокий сигнал датчика, устанавливают в качестве потенциального основного края, который потенциально захвачен большим пальцем пользователя. На этапе 406 вычислительное устройство определяет, превышает ли самый высокий сигнал датчика пороговое значение.
Если на этапе 406 вычислительное устройство определит, что самый высокий сигнал датчика не превышает порогового значения, то способ переходит к этапу 420, на котором вычислительное устройство определяет, что характер захвата пользователя неясен. Так как захват пользователя неясен, на этапе 422 вычислительное устройство снова подключается к акселерометру, содержащемуся внутри ручного медицинского сканирующего устройства. На этапе 424 вычислительное устройство определяет, находится ли вектор силы тяжести под достаточным неперпендикулярным углом к дисплею ручного медицинского сканирующего устройства. Если на этапе 424 вычислительное устройство определяет, что вектор силы тяжести не находится под достаточным неперпендикулярным углом к дисплею, то способ переходит к этапу 428, на котором вычислительное устройство поддерживает текущую ориентацию дисплея. Если же вычислительное устройство определяет, что вектор силы тяжести находится под достаточным неперпендикулярным углом к дисплею, то вместо этого способ переходит к этапу 426, на котором вычислительное устройство задает основной край на основе вектора силы тяжести. Затем способ переходит к этапу 414, на котором вычислительное устройство ориентирует дисплей таким образом, чтобы основной край находился в нижней части дисплея.
Если на этапе 406 вычислительное устройство определит, что самый высокий сигнал датчика превышает пороговое значение, то способ переходит к этапу 410 и, опционально, к этапу 408. На этапе 408 вычислительное устройство переводит ручное медицинское сканирующее устройство из спящего режима в активный режим, а на этапе 410 вычислительное устройство определяет, достаточен ли сигнал датчика на краю, противоположном потенциальному основному краю, для указания захвата пальцем, например, указательным пальцем. Если на этапе 410 вычислительное устройство определяет, что сигнал датчика достаточен для указания захвата пальцем, то способ переходит к этапу 412, на котором вычислительное устройство идентифицирует потенциальный основной край в качестве захваченного большим пальцем руки пользователя и, таким образом, задает потенциальный основной край в качестве основного края. Затем способ переходит к этапу 414, на котором вычислительное устройство ориентирует дисплей таким образом, чтобы основной край находился в нижней части дисплея.
Если на этапе 410 вычислительное устройство определит, что сигнал датчика на краю, противоположном потенциальному основному краю, недостаточен для указания захвата пальцем, то способ переходит к этапу 416, на котором вычислительное устройство определяет, достаточен ли сигнал на заключенном крае между потенциальным основным краем и краем, противоположным основному краю для указания захвата межпальцевой перепонкой. Если вычислительное устройство определит, что сигнал недостаточен, то способ переходит к этапу 420 и продолжается, как и прежде. Если вычислительное устройство определит, что сигнал достаточен, то способ переходит к этапу 418, на котором вычислительное устройство учитывает предпочтение в доминировании одной из рук, чтобы определить, какой край захвачен большим пальцем пользователя, и задает этот край в качестве основного края. Затем способ переходит к этапу 414, на котором вычислительное устройство ориентирует дисплей таким образом, чтобы основной край находился в нижней части дисплея.
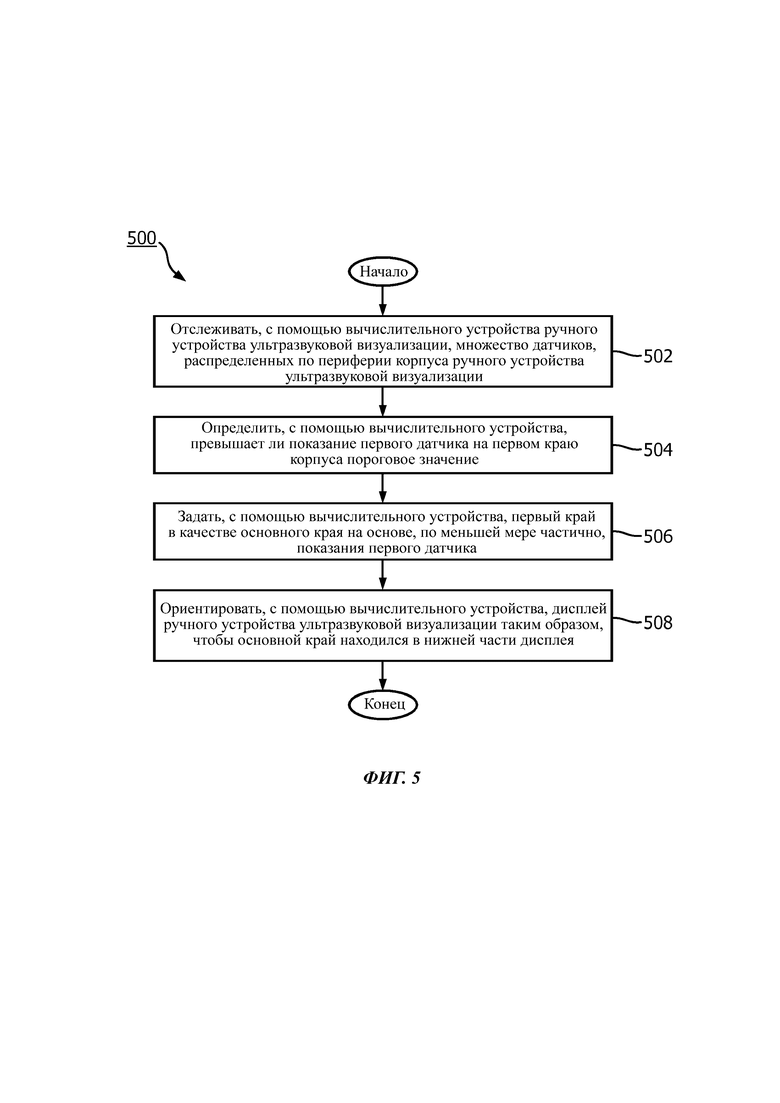
На фиг. 5 описан способ 500. Способ 500 может быть реализован любым из описанных в данном документе ручных медицинских сканирующих устройств, например, ручными медицинскими сканирующими устройствами 102, 202 и 302. Способ начинается с этапа 502, на котором вычислительное устройство ручного устройства ультразвуковой визуализации отслеживает множество датчиков, распределенных по периферии корпуса ручного устройства ультразвуковой визуализации. Затем вычислительное устройство на этапе 504 определяет, превышает ли показание первого датчика на первом краю корпуса пороговое значение. На этапе 506 вычислительное устройство задает первый край в качестве основного края на основе, по меньшей мере частично, показания первого датчика. В некоторых случаях задание первого края в качестве основного края включает в себя определение вычислительным устройством того, что первый край захвачен большим пальцем оператора. Определение того, что первый край захвачен большим пальцем оператора, может включать в себя определение того, что показание первого датчика превышает показание второго датчика. В некоторых случаях определение того, что первый край захвачен большим пальцем оператора, может включать в себя просмотр сохраненного предпочтения в доминировании одной из рук. Дисплей ручного устройства ультразвуковой визуализации ориентируют с помощью вычислительного устройства на этапе 508 таким образом, чтобы основной край находился в нижней части дисплея. Способ 500 может также включать в себя переключение ручного устройства ультразвуковой визуализации из спящего режима в активный режим в ответ на определение того, что показания первого датчика превышают пороговое значение.
Специалисты в данной области техники поймут, что описанные выше устройства, системы и способы могут быть модифицированы различными способами. Соответственно, специалисты в данной области техники оценят, что варианты осуществления, охватываемые настоящим раскрытием, не ограничены конкретными показанными в качестве примера вариантами осуществления, описанными выше. В этом отношении, несмотря на то, что показаны и описаны иллюстративные варианты осуществления, в вышеприведенном раскрытии подразумевается возможность широкого диапазона модификаций, изменений и замен. Предполагается, что такие изменения могут быть внесены в вышеизложенное, не выходя за рамки настоящего раскрытия. Соответственно, целесообразно, чтобы прилагаемая формула изобретения толковалась широко и в соответствии с настоящим раскрытием.

Группа изобретений относится к медицине. Медицинское ультразвуковое сканирующее устройство содержит корпус, выполненный с возможностью ручного использования, матрицу преобразователей, дисплей, соединенный с корпусом, множество датчиков, распределенных по периферии корпуса и выполненных с возможностью обнаружения того, когда кисть руки оператора расположена вокруг корпуса, а также вычислительное устройство, размещенное внутри корпуса, при этом вычислительное устройство выполнено с возможностью осуществления связи с матрицей преобразователей, дисплеем и датчиками. Вычислительное устройство выполнено с возможностью: отслеживания датчиков, определения того, превышает ли показание первого датчика на первом краю периферии корпуса пороговое значение, задания первого края в качестве основного края, на основе, по меньшей мере частично, показания первого датчика, и ориентирования дисплея таким образом, чтобы основной край находился в нижней части дисплея. Применение данной группы изобретений позволит расширить арсенал технических средств, а именно медицинских ультразвуковых сканирующих устройств и способов работы с ними. 2 н. и 11 з.п. ф-лы, 5 ил.
1. Медицинское ультразвуковое сканирующее устройство, содержащее:
корпус, имеющий размеры и форму, обеспечивающие возможность ручного использования;
матрицу ультразвуковых преобразователей, расположенную на нижней стороне корпуса и выполненную с возможностью получения ультразвуковых данных при размещении рядом с телом пациента;
дисплей, расположенный на верхней стороне корпуса и выполненный с возможностью отображения медицинской информации, выведенной на основе полученных ультразвуковых данных;
датчики, расположенные в пределах корпуса и распределенные по его периферии и выполненные с возможностью обнаружения того, когда кисть руки оператора расположена вокруг корпуса; и
вычислительное устройство, размещенное внутри корпуса, при этом вычислительное устройство выполнено с возможностью осуществления связи с матрицей ультразвуковых преобразователей, дисплеем и датчиками,
причем вычислительное устройство выполнено с возможностью:
отслеживания датчиков;
определения того, превышает ли показание первого датчика на первом краю периферии корпуса пороговое значение для большого пальца оператора;
отличающееся тем, что вычислительное устройство дополнительно выполнено с возможностью:
задания первого края в качестве основного края на основе, по меньшей мере частично, показания первого датчика путем определения того, что первый край захвачен большим пальцем оператора; и ориентирования медицинской информации на дисплее таким образом, чтобы основной край находился в нижней части дисплея.
2. Ультразвуковое устройство по п. 1, в котором вычислительное устройство также выполнено с возможностью:
переключения ультразвукового устройства из спящего режима в активный режим в ответ на определение того, что показание первого датчика превышает пороговое значение.
3. Ультразвуковое устройство по п. 2, выполненное с возможностью расходования в спящем режиме энергии, достаточной только для отслеживания датчиков.
4. Ультразвуковое устройство по п. 2, в котором вычислительное устройство также выполнено с возможностью:
включения дисплея в ответ на переключение ультразвукового устройства из спящего режима в активный режим.
5. Ультразвуковое устройство по п. 1, в котором вычислительное устройство также выполнено с возможностью:
определения того, что показание второго датчика на втором краю указывает на то, что второй край захвачен пальцем оператора, отличным от большого пальца.
6. Ультразвуковое устройство по п. 1, в котором вычислительное устройство также выполнено с возможностью:
определения того, что показание третьего датчика на третьем краю указывает на то, что третий край захвачен межпальцевой перепонкой кисти руки оператора.
7. Ультразвуковое устройство по п. 1, в котором датчики представляют собой емкостные датчики.
8. Ультразвуковое устройство по п. 1, содержащее также акселерометр, причем вычислительное устройство выполнено с возможностью задания первого края в качестве основного края на основе, по меньшей мере частично, показания акселерометра.
9. Ультразвуковое устройство по п. 1, в котором вычислительное устройство выполнено с возможностью:
активирования матрицы ультразвуковых преобразователей для получения ультразвуковых данных.
10. Способ работы ручного медицинского ультразвукового сканирующего устройства, содержащего:
корпус, имеющий размеры и форму, обеспечивающие возможность ручного использования;
матрицу ультразвуковых преобразователей, расположенную на нижней стороне корпуса и выполненную с возможностью получения ультразвуковых данных при размещении рядом с телом пациента; и
дисплей, расположенный на верхней стороне корпуса и выполненный с возможностью отображения медицинской информации, выведенной на основе полученных ультразвуковых данных,
причем способ включает в себя этапы:
отслеживание, с помощью вычислительного устройства ручного ультразвукового устройства, датчиков, расположенных в пределах корпуса и распределенных по его периферии;
определение, с помощью вычислительного устройства, того, превышает ли показание первого датчика на первом краю корпуса пороговое значение для большого пальца оператора;
причем способ отличается тем, что дополнительно включает в себя:
задание, с помощью вычислительного устройства, первого края в качестве основного края на основе, по меньшей мере частично, показания первого датчика путем определения того, что первый край захвачен большим пальцем оператора; и
ориентирование, с помощью вычислительного устройства, медицинской информации на дисплее таким образом, чтобы основной край находился в нижней части дисплея.
11. Способ по п. 10, также включающий в себя переключение, с помощью вычислительного устройства, ручного ультразвукового устройства из спящего режима в активный режим в ответ на определение того, что показание первого датчика превышает пороговое значение.
12. Способ по п. 10, в котором определение того, что первый край захвачен большим пальцем оператора, включает в себя определение того, что показание первого датчика превышает показание второго датчика.
13. Способ по п. 10, в котором определение того, что первый край захвачен большим пальцем оператора, включает в себя просмотр сохраненного предпочтения в доминировании одной из рук.
| WO 2017222964 A1, 28.12.2017 | |||
| УЛЬТРАЗВУКОВАЯ СИСТЕМА ДИАГНОСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ С ЗАВИСЯЩЕЙ ОТ КОНТЕКСТА ПАНЕЛЬЮ УПРАВЛЕНИЯ | 2012 |
|
RU2617255C2 |
| US 20170251205 A1, 31.08.2017 | |||
| JP 2011067544 A, 07.04.2011 | |||
| JP 2008027183 A, 07.02.2008. | |||

