Изобретение относится к области сельскохозяйственного машиностроения, в частности, к почвообрабатывающим агрегатам для обработки почвы.
Рабочие органы культиваторов подразделяются на четыре группы: подрезающие, вычесывающие, присыпающие и органы специального назначения. Подрезающие рабочие органы представлены односторонними или стрельчатыми лапами [Кленин Н.И., Сакун В.А. Сельскохозяйственные и мелиоративные машины.-М.: Колос, 1994.-751с.;Ториков В.Е., Старовойтов С.И., Блохин В.Н. Особенности конструкций комбинированных машин для предпосевной обработки почвы / Вестник Брянской ГСХА. Брянск: Издательство Брянской ГСХА, 2006. С.24 - 26].
Модернизация подрезающих рабочих органов осуществляется в направлении снижения энергоемкости, обеспечения эксплуатационной и технологической надежности, универсализации за счет расширения функциональных возможностей[Бледных В.В., Мазитов Н.К., Рахимов Р.С., Коновалов В.Н., Хлызов Н.Т., Стоян С.В., Рахимов И.Р. Универсальные энерго -, ресурсосберегающие почвообрабатывающие и посевные машины комплекса "Уралец" / Достижения науки и техники АПК. 2006. №9. С.2 -7].
Снижение энергоемкости в свою очередь осуществляется по пяти направлениям: за счет реализации колебаний[Старовойтов С.И. Анализ способов снижения энергоемкости лемеха // Инновационные процессы в АПК: Сборник научных статей V Международной научно-практической конференции преподавателей, молодых ученых, аспирантов и студентов 17-19 апреля . М.:РУДН, 2013. С.81-82; Федоренко И.Я. Теория взаимодействия рабочих органов с почвой/ Тракторы и сельхозмашины, 2016. №3.С.15-19.], уменьшения сил трения между поверхностью почворежущих рабочих органов и почвенного пласта, формоизменения геометрии, осуществления движения режущего рабочего органа в созданной сети опережающих трещин, оптимизации условий функционирования почворежущих элементов[IzmailovA.Yu., LobachevskyYa.P., HoroshenkovV.K. Anautomatedsystemfortheoptimizationofproductionprocessesinagriculture //InternationalJournalofScienceandResearch. 2016. Т. 5. №10. С. 592-596].
Известны работы О. В. Верняева, где работа стрельчатой лапы сопровождается колебанием режущего рабочего органа вокруг стойки за счет механизма активного привода. Данное направление поддержано учеными американского Национального института сельскохозяйственного машиностроения. Тяговое сопротивление активной лапы шириной захвата 610 мм и амплитудой колебания 8 меньше на 30% в сравнении с пассивным аналогом [Верняев О.В. Активные рабочие органы культиваторов.-М.: Машиностроение, 1983. С. 4].
меньше на 30% в сравнении с пассивным аналогом [Верняев О.В. Активные рабочие органы культиваторов.-М.: Машиностроение, 1983. С. 4].
Работа плоскорежущей лапы с переменным углом крошения [Бурченко П.Н. Механико–технологические основы почвообрабатывающих машин нового поколения / Монография. М.: ВИМ, 2002. С.17.] также способствует снижению энергоемкости взаимодействия за счет сочетаний деформаций изгиба и кручения [Пат. № 1641208 А 01 В 35/20 РФ. Плоскорежущая лапа / Бледных В.В., Свечников П.Г., Шатруков В.И. // Бюл.№14.1991].
К недостаткам выше указанной лапы можно отнести то, что конструкция крыла лапы не учитывает возможность работы ее лезвия режущей кромки в совместном режиме смятия и растяжения пласта.
В случае, если лезвие режущей кромки левого и правого крыла лапы отклонено от дна борозды в сторону дневной поверхности поля на угол, достаточный для преодоления упругих деформаций при минимальных значениях силы трения[Пат. РФ № 2648764 А01В 35/20. Универсальная стрельчатая лапа / Ториков В.Е., Старовойтов С.И. –Опубл. 26.03.2018, Бюл.№ 10], то в процессе работы режущая кромка и лезвие правого, левого крыла работают на смятие и растяжение, а непосредственно крылья лапы на изгиб и кручение, что приведет к снижению энергоемкости при обработке.
Или же, держатель, выполненный в форме эллипса, оказывает воздействие в продольно-вертикальной плоскости, по своей сути создавая сеть опережающих трещин, позволяющих снизить энергоемкость обработки. Также, верхняя часть держателя защищает стойку от прямого удара почвы. Стрельчатая лапа с нулевым углом резания оказывает лишь воздействие линией, осуществляя только подрезание сорняков [Пат. РФ №2730659 МПК А01В 49/02. Комбинированный почвообрабатывающий агрегат /А.Ю. Измайлов, Я.П. Лобачевский, Б.Х. Ахалая, С.И. Старовойтов, Ю.С. Ценч.-Опубл. 24.08.2020. Бюл. №24].
Оптимизация с учетом условий функционирования в большей мере относится к этапу динамизации системы, где с повышением скорости и ширины захвата рабочего органа, происходит изменение площади фронтальной проекции рабочего органа [Пат. РФ №182130 МПК А01В 35/22. Рабочий орган для рыхления почвы / Джабборов Н.И., Захаров А.М.. Семенова Г.А. – Опубл. 03.08.2018. Бюл. №23].
Также для стрельчатых лап предложено в зависимости от вязкости обрабатываемой почвы изменять угол раствора крыльев [Пат. №2249323 А 01 В 35/26 РФ. Стрельчатая лапа / Л.Н. Бурков Л.Н. // Бюл. №1.2005].
Повышение эксплуатационной надежности заключается в применении износостойкого или многослойного материала, термообработке. В частности, для стрельчатых лап предложено осуществлять термодеформационное воздействие на тыльную сторону режущей кромки [Пат. №2462852 А 01 В 35/20 РФ. Стрельчатая лапа культиватора / Михальченков А.М., Ковалев А.П., Будко С.И., В.Ф. Комогорцев В.Ф. Бюл.№1. 2012;]. При более мягком верхнем слое будет создаваться эффект самозатачивания.
Технологическая надежность повышается при криволинейном лезвии, реализуя беспрепятственное схождение сорняков с рабочего органа[Пат. №1380626 А 01 В 35/26 РФ. Почвообрабатывающий рабочий орган / Кушнарев А.С., Шанина З.М. // Бюл. №10.1988; Тищенко С.С., Гаврильченко А.С., Волик Б.А. К динамике движения сорняков по полольной культиваторной лапе// Конструирование, виробництво та експлуатаiя сiльськогосподарських машин: Загальнодерж. Мiжвiдомч. науково техн. збiрник. Кiровоград : КДТУ, 2003. Вип. 33. С. 95 – 99; Тищенко С.С., Гаврильченко А.С., Волик Б.А. Проектирование стрельчатых культиваторных лап с криволинейным лезвием на основе логарифмической спирали // Науковий вiсник Нацiонального аграрного унiверситетк. Кiровоград.: НАУ, 2004. Вип.73. С.304 - 309; Божко И.В., Пархоменко Г.Г., Громаков А.В., Камбулов С.И., Рыков В.Г. Разработка комбинированного рабочего органа для послойной безотвальной обработки почвы / Тракторы и сельхозмашины. 2016. №8. С.3-5; Пат. №1614717, А01В 32/20 РФ. Рабочий орган культиватора - плоскореза / Гайпанов Х.С., Булгарнев Г.Г. // Бюл. №1. 1998].
Плоский режущий контур культиваторной лапы обеспечивает устойчивость глубины хода [Руденко Н.Е., Кайванов С.Д., Завялик Ф.Н. Скоростной энергосберегающий культиватор / Тракторы и сельхозмашины. 2016. №7. С. 18 - 21].
Универсализация за счет расширения функциональных возможностей заключается в совмещении элементарных технологических операций. С целью дополнительного крошения пласта на стрельчатой лапе культиватора могут быть размещены прутки с круглым сплошным сечением [198].
Прототипом является культиватор КПС-4, предназначенный для сплошной обработки почвы, предпосевного рыхления и подрезания сорняков [Карпенко А.Н., Халанский В.М. Сельскохозяйственные машины. - М.: Агропромиздат, 1989. - C.56], включающийстрельчатые подрезающие рабочие органы.
К недостаткам известного технического устройства относится невозможность регулирования в процессе работы глубины хода рабочих органов, крошения почвы, величины тягового сопротивления почвообрабатывающего орудия, повышенная забиваемость рабочих органов растительными остатками и почвой.
Технической задачей изобретения является повышение надежности технологической процесса, управляемость качеством крошения и величиной тягового сопротивления рабочих органов.
Поставленная техническая задача достигается тем, что почвообрабатывающее орудие, включающее раму с продольными балками, несущей балкой и плоские рабочие органы, отличающееся тем, плоский рабочий орган имеет эллиптическую форму и выполнен составным со сменной криволинейной металлической режущей кромкой и основой из сверхвысокомолекулярного полиэтилена, в которую вмонтирован датчик глубины хода, связанный электрической цепью с шаговым двигателем, на роторе которого размещено зубчатое колесо, входящее в зацепление с зубчатой рейкой, размещенной на стойке плоского рабочего органа эллиптической формы, которая снабжена тензодатчиком, электрической цепью связанным с шаговым двигателем, на роторе которого размещено зубчатое колесо, входящее в зацепление с зубчатой рейкой, которая связана с зубчатым колесом, размещенным в верхней части стойки плоского рабочего органа эллиптической формы, несущая балка с помощью зубчатого зацепления связана с зубчатым колесом шагового двигателя, в свою очередь электрической цепью связанного с видеокамерой, расположенной на кронштейне, связанном с продольными балками рамы для поворота несущей балки, изменяя угол резания рабочего органа эллиптической формы.
Изобретение поясняется чертежами.
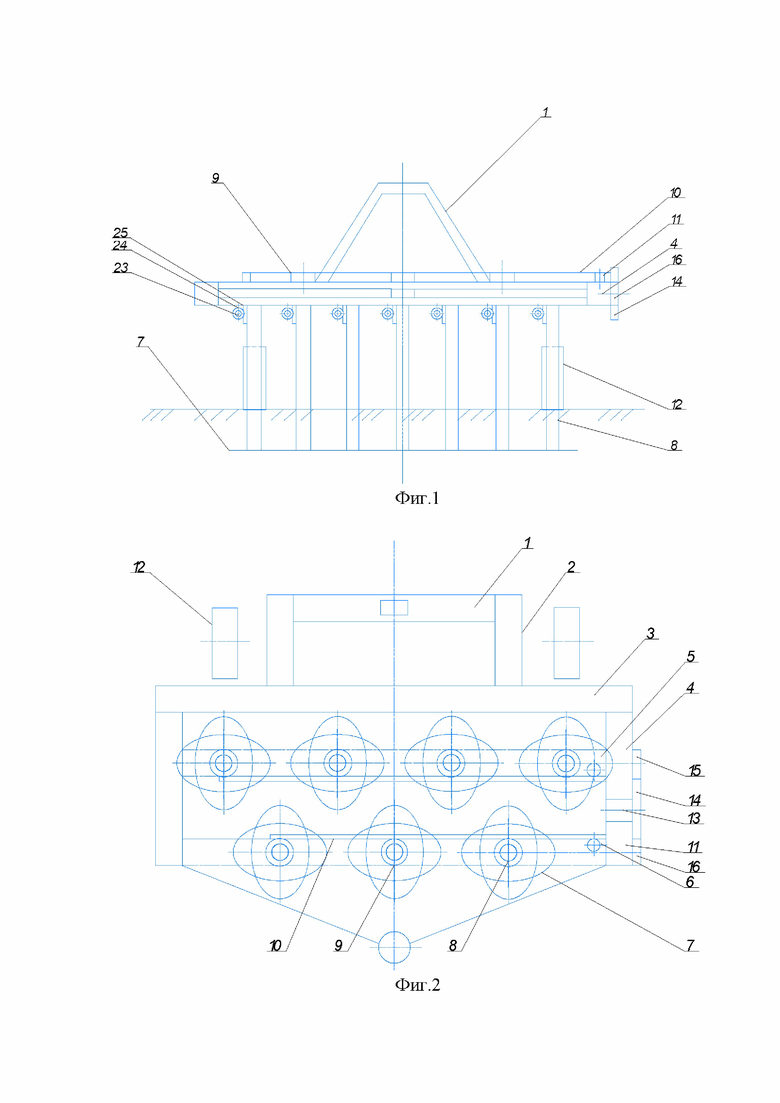
На фиг. 1 –представлена фронтальная проекция почвообрабатывающего орудия, на фиг.2 – горизонтальная проекция, а фиг.3 – вид сбоку, на фиг.4 – вид сверху рабочего органа эллиптической формы, на фиг.5 - сечение рабочего органа, на фиг. 6 - функциональная схема управления рабочими органами.
На сборной раме почвообрабатывающего орудия для сплошной обработки почвы расположен замок автосцепки 1. К замку автосцепки 1 приварены две короткие продольные балки 2, к которым приварена основная поперечная балки 3. К основной поперечной балки 3 приварены две длинные продольные балки 4. Между продольными балками 4 размещены несущие балки 5 и 6, имеющие круглое сечение. Сечение балок 2, 3, 4 – квадратное пустотелое.
Рабочий орган 7 эллиптической формы связан со стойкой 8. В верхней части стойки 8 размещено зубчатое колесо 9, которое связано с зубчатой рейкой 10. Рейка 10 связана с шаговым электродвигателем 11.
В процессе работы в зависимости от величины тягового сопротивления импульсы поступают на шаговый двигатель 11, который дозированного вызывает смещение рейки 10. Смещение рейки 10 вызывает поворот зубчатого колеса 9, которое, соответственно, вызывает поворот рабочего органа 7 эллиптической формы.
Опорные колеса 12 крепятся к продольным балкам 2.
На правой продольной балке 4 размещен шаговый электродвигатель 13 и зубчатое колесо 14. Зубчатое колесо 14 связано с зубчатыми колесами 15 и 16, которые в свою очередь размещены на несущих балках 5 и 6.
К продольным балкам 4 прикрепляется кронштейн 17 с видеокамерой 18. В процессе работы видеокамера отслеживает степень крошения почвы, и в соответствии с номинальными значениями вызывает с помощью системы автоматизированного управления поворот несущих балок 5 и 6, изменяя угол резания рабочих органов 7 эллиптической формы.
К стойке 8 приварено основание 19, к которому при помощи крепежных метизов прикреплен остов 20 рабочего органа 7. Материалом остова 20 является сверхвысокомолекулярный полиэтилен, обладающий минимальной величиной адгезии и коэффициента внешнего трения почвы. К остову 20 присоединяется криволинейная металлическая сменная режущая кромка 21, с выполненными в ней резьбовыми отверстиями. В остове 20 смонтирован датчик глубины хода 22.
На несущих балках 5 и 6 размещаются шаговые двигатели 23, связанные зубчатым колесом 24 с зубчатой рейкой 25, размещенной на стойке 8эллиптического рабочего органа 7.
Устройство работает следующим образом.
Управление рабочими органами осуществляется трехконтурной системой автоматизированного управления, включающей регулятор 26.
Первый контур системы автоматизированного управления обеспечивает контроль положения рабочего органа. Тензодатчик 27, расположенный на каждой стойке 8, контролирует величину тягового сопротивления рабочего органа. При работе на более плотной или тяжелой почве, что приводит к увеличению тягового сопротивления, тензодатчик 27 через шаговый электродвигатель 11 корректирует положение рабочего органа 7 эллиптической формы таким образом, что между большой осью эллипса и направлением движения образуется угол атаки, отличный от 90°.
Второй контур системы автоматизированного управления через видеокамеру 18 вызывает с помощью шагового двигателя 13 и зубчатых колес 14, 15, 16поворот несущих балок 5 и 6, изменяя угол резания рабочих органов 7 эллиптической формы. Если степень крошения недостаточная, угол резания увеличивается.
Третий контур системы автоматизированного управления контролирует и корректирует глубину хода рабочих органов. Первоначально, глубина хода рабочих органов эллиптической формы 7 устанавливается с помощью опорных колес 12. При работе датчика глубины хода 22 осуществляется перемещение стойки 8 за счет работы шагового двигателя 23, который через зубчатое зацепление колеса 24 и рейки 25, неподвижно закрепленной на стойке 8, перемещает ее вверх или вниз.
Плоская форма рабочего органа эллиптической формы обеспечивает наилучшую устойчивость рабочего органа. Остов рабочего органа из сверхвысокомолекулярного полиэтилена исключает залипание рабочего органа почвой. Криволинейное лезвие обеспечивает беспрепятственное схождение растительной массы с режущей кромки.
При переналадке культиватора для обработки междурядий удаляются рабочие органы несущей балки 6.
Использование изобретения позволит повысить надежность технологической процесса, обеспечить управляемость качеством крошения и величиной тягового сопротивления рабочих органов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Почвообрабатывающий агрегат с универсальными рабочими органами | 2021 |
|
RU2755946C1 |
| Комбинированный почвообрабатывающий агрегат | 2021 |
|
RU2752661C1 |
| Комбинированный почвообрабатывающий агрегат | 2020 |
|
RU2730659C1 |
| Почвообрабатывающий агрегат с многофункциональным устройством | 2024 |
|
RU2829574C1 |
| Многофункциональный почвообрабатывающий агрегат | 2021 |
|
RU2757623C1 |
| Почвообрабатывающий рабочий орган для полосной и послойной обработки почвы | 2022 |
|
RU2789551C1 |
| Многофункциональный комбинированный почвообрабатывающий агрегат | 2020 |
|
RU2751361C1 |
| УНИВЕРСАЛЬНАЯ СТРЕЛЬЧАТАЯ ЛАПА | 2016 |
|
RU2648764C2 |
| Гребнеобразующий культиватор-подкормщик | 2021 |
|
RU2762212C1 |
| РАБОЧИЙ ОРГАН ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2008 |
|
RU2375861C1 |


Изобретение относится к сельскому хозяйству. Почвообрабатывающее орудие включает раму с продольными балками (4), несущей балкой (5) и плоские рабочие органы (7). Плоский рабочий орган (7) имеет эллиптическую форму и выполнен составным со сменной криволинейной металлической режущей кромкой и основой из сверхвысокомолекулярного полиэтилена, в которую вмонтирован датчик глубины хода. Датчик глубины хода связан электрической цепью с шаговым двигателем, на роторе которого размещено зубчатое колесо, входящее в зацепление с зубчатой рейкой, размещенной на стойке (8) плоского рабочего органа (7) эллиптической формы, которая снабжена тензодатчиком, электрической цепью связанным с шаговым двигателем (11), на роторе которого размещено зубчатое колесо, входящее в зацепление с зубчатой рейкой, которая связана с зубчатым колесом (9), размещенным в верхней части стойки (8) плоского рабочего органа (7) эллиптической формы. Несущая балка (5) с помощью зубчатого зацепления (15) связана с зубчатым колесом (14) шагового двигателя (13), в свою очередь электрической цепью связанного с видеокамерой, расположенной на кронштейне, связанном с продольными балками (4) рамы для поворота несущей балки (5), изменяя угол резания рабочего органа (7) эллиптической формы. Обеспечивается повышение надежности технологического процесса обработки почвы, управляемость качеством крошения и величиной тягового сопротивления рабочих органов. 6 ил.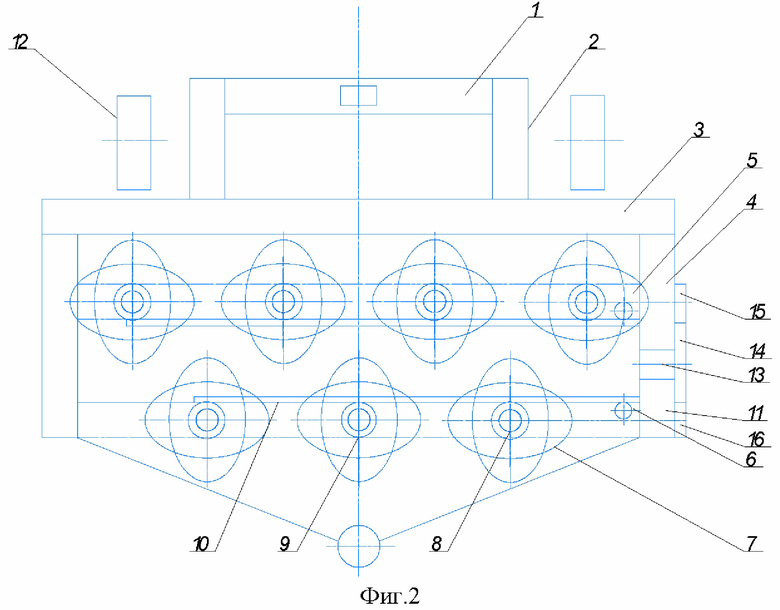
Почвообрабатывающее орудие, включающее раму с продольными балками, несущей балкой и плоские рабочие органы, отличающееся тем, что плоский рабочий орган имеет эллиптическую форму и выполнен составным со сменной криволинейной металлической режущей кромкой и основой из сверхвысокомолекулярного полиэтилена, в которую вмонтирован датчик глубины хода, связанный электрической цепью с шаговым двигателем, на роторе которого размещено зубчатое колесо, входящее в зацепление с зубчатой рейкой, размещенной на стойке плоского рабочего органа эллиптической формы, которая снабжена тензодатчиком, электрической цепью связанным с шаговым двигателем, на роторе которого размещено зубчатое колесо, входящее в зацепление с зубчатой рейкой, которая связана с зубчатым колесом, размещенным в верхней части стойки плоского рабочего органа эллиптической формы, несущая балка с помощью зубчатого зацепления связана с зубчатым колесом шагового двигателя, в свою очередь электрической цепью связанного с видеокамерой, расположенной на кронштейне, связанном с продольными балками рамы для поворота несущей балки, изменяя угол резания рабочего органа эллиптической формы.
| Устройство для предпосевной обработки почвы | 2016 |
|
RU2619456C1 |
| Рабочий орган почвообрабатывающего орудия ПРМ-3-3 | 1988 |
|
SU1604176A1 |
| КОРНЕПОДРЕЗЧИК | 2013 |
|
RU2528023C1 |
| Устройство для дозированной подачи порошкообразных материалов | 1983 |
|
SU1149126A1 |

