Изобретение относится к планетарным передачам типа K-H-V (по классификации, принятой в книге В.Н. Кудрявцев. Планетарные передачи. Машиностроение, М. 1966 г., стр. 10-11) с центральной осью передачи, лежащей внутри основной окружности планетарного колеса. Передачи такого типа в России используются в так называемых планетарно-цевочных редукторах, а за рубежом они известны как передачи типа CYCLO. Передачи типа K-H-V в самом общем случае содержат установленные в корпусе входной вал с эксцентриком и выходной вал. На эксцентрик с возможностью вращения посажено планетарное колесо, сопрягающееся с неподвижным колесом внутреннего зацепления. Планетарное колесо связано с выходным валом механизмом передачи вращения между параллельными валами, оси которых могут иметь относительное перемещение, например, механизмом параллельных кривошипов.
Известен планетарный механизм в редукторе скорости по патенту US 7553249. Планетарный механизм содержит коленчатый (эксцентриковый) вал с тремя эксцентриками, установленный в свободном водиле, и три последовательно расположенных планетарных колеса с внешними зубьями, установленные на каждом из эксцентриков. Эксцентрики, а соответственно и планетарные колеса смещены по фазе друг относительно друга на равные углы в 120 градусов. Вращение от входного вала передается на эксцентрики с помощью предварительной ступени, образованной шестерней на входном валу и находящимся с ней в зацеплении зубчатым колесом на коленчатом валу. Эта предварительная ступень позволяет увеличить передаточное отношение редуктора. Планетарные колеса совершают плоскопараллельное движение и, находясь в зацеплении с колесом внутреннего зацепления на корпусе, начинают вращать водило, которое в данной конструкции является выходным валом передачи, вокруг оси передачи. Основным недостатком этого механизма является невозможность исполнения такого редуктора с полым выходным валом, что требуется в ряде применений редукторов, например в приводах запорной арматуры.
Известен планетарный механизм по патенту CN 101813166, который содержит также три последовательно расположенных планетарных колеса, но с внутренними зубьями. Каждое колесо посажено на подшипниках на три эксцентриковых вала с тремя эксцентриками каждый. Эксцентрики каждого из колес смещены друг относительно друга по фазе на равные углы в 120 градусов. Один из валов является входным, два других - опорные. Планетарные колеса находятся в зацеплении с колесом внешнего зацепления, являющимся выходным валом редуктора. Эта конструкция в принципе может быть выполнена с полым валом. Однако она имеет ограничения по передаточному отношению, которое определяется только числами зубьев планетарных колес и колеса внешнего зацепления. Кроме того, из-за посадки каждого колеса на три эксцентрика, требуется повышенная точность изготовления деталей передачи, что сильно удорожает конструкцию в целом. Уменьшить количество эксцентриковых валов невозможно, так как это приводит к появлению мертвых зон при работе механизма.
Наиболее близким по конструкции является планетарный механизм многоприводного редуктора по патенту RU 2581107, выбранный нами за прототип. Редуктор содержит последовательно расположенные два планетарных колеса внутреннего зацепления. Подшипниковые опоры каждого из колес расположены на двух эксцентриковых валах. Валы располагаются диаметрально противоположно друг к другу вне зубчатого профиля планетарных колес. Эксцентрики соседних колес смещены друг относительно друга по фазе на равные углы в 180 градусов. Оба эксцентриковых вала связаны с двигателями, чем устраняется проблема мертвых зон. Планетарные колеса находятся в зацеплении с колесом внешнего зацепления, расположенным внутри планетарных колес и которое является выходным валом. Его можно выполнить полым, что расширяет область применения планетарного механизма.
Передаточное отношение этого механизма, как и предыдущего, определяется только числами зубьев планетарных колес и колеса внешнего зацепления, что ограничивает его величину при заданных габаритах и силовых характеристиках редуктора.
Техническим результатом изобретения является увеличение передаточного отношения планетарного механизма при прочих равных условиях, т.е. в тех же габаритных размерах и с той же допустимой рабочей нагрузкой.
Для достижения указанного результата, планетарный механизм, как и прототип, содержит, по меньшей мере, два последовательно расположенных планетарных колеса, подшипниковые опоры которых расположены на эксцентриках, по меньшей мере, одного эксцентрикового вала. Эксцентрики вала сдвинуты друг относительно друга по фазе на равные углы. Каждое планетарное колесо имеет основной венец внутреннего зацепления, и венцы всех планетарных колес находятся в зацеплении с одним колесом внешнего зацепления. В отличие от прототипа каждое планетарное колесо снабжено одной предварительной планетарной ступенью. Для этого на каждом планетарном колесе выполнен дополнительный внутренний зубчатый профиль, смещенный относительно основного и находящийся в зацеплении с сателлитом, посаженным на свободное водило. Сателлит с другой стороны находится в зацеплении с шестерней на входном валу механизма. Каждое планетарное колесо посажено на подшипниках на эксцентричные участки свободного водила. Эксцентричные участки на водиле по фазе сдвинуты на равные углы друг относительно друга.
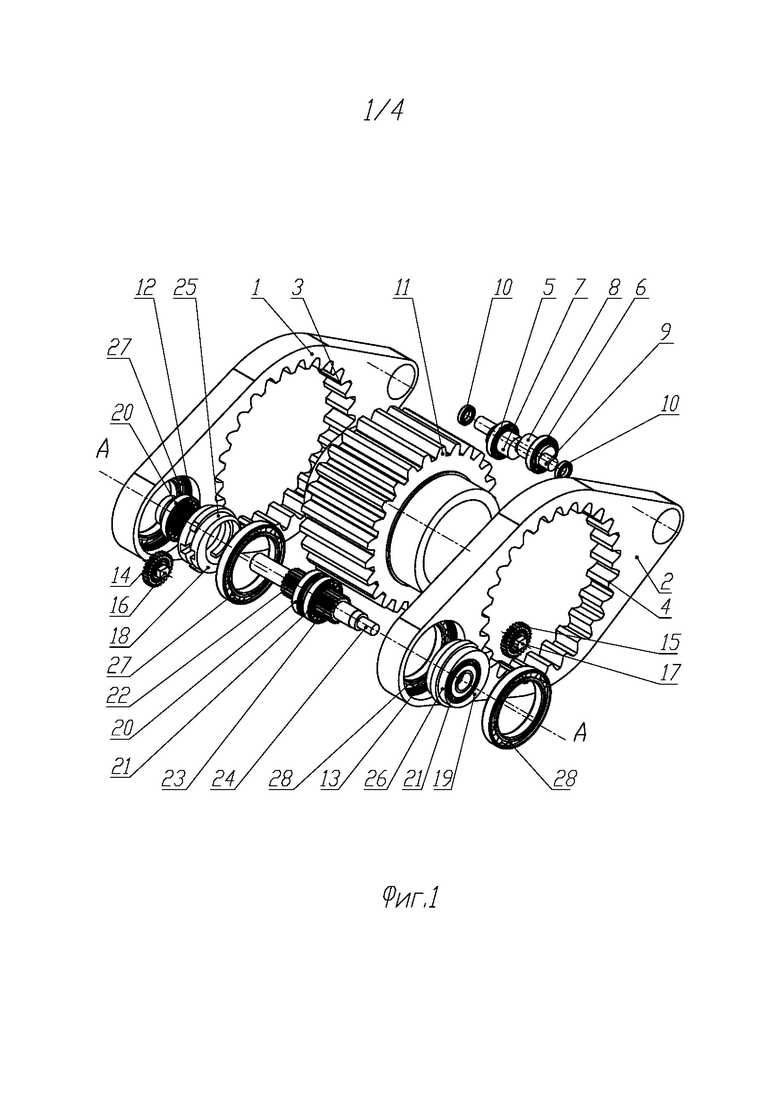
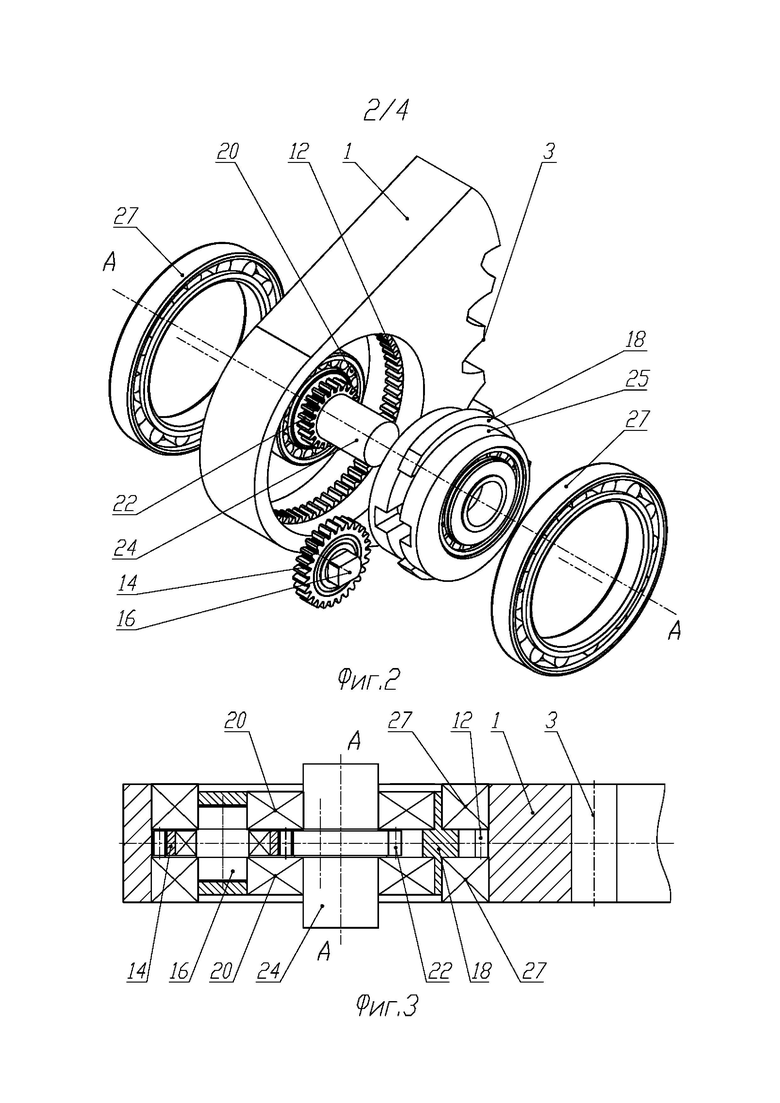
Изобретение иллюстрируется графическими материалами, где на фиг.1 в разобранном виде представлен вариант механизма с двумя планетарными колесами, и одним эксцентриковым валом. При этом изображены только те детали, которые являются существенными для данной схемы. Фиг. 2 иллюстрирует устройство предварительной планетарной ступени для одного планетарного колеса. На фиг.3 показано сечение предварительной ступени планетарного механизма по оси А-А. На фиг. 4 представлен вид сверху на предварительную ступень, а на фиг. 5 вид сверху на механизм с двумя эксцентриковыми валами.
Планетарный механизм, изображенный на фиг. 1, с детализацией на фиг. 2, 3 и 4, содержит два планетарных колеса 1 и 2 с зубчатым профилем внутреннего зацепления 3 и 4. Колеса 1 и 2 установлены в подшипниковых опорах 5 и 6 на эксцентриках 7 и 8 одного эксцентрикового вала 9. Эксцентрики 7 и 8 смещены по фазе друг относительно друга на угол в 180 градусов. Если планетарных колес, а соответственно и эксцентриков будет больше, например 3 или 4, то угол между ними будет составлять 360̊ / 3 или 360̊ /4, то есть 120 или 90 градусов соответственно. Эксцентриковый вал, в свою очередь установлен на подшипниках 10 в корпусе (корпус на фигурах не показан). Оба колеса внутреннего зацепления 1 и 2 находятся в зацеплении с одним колесом внешнего зацепления 11, которое в данной схеме является выходным валом, установленным в корпусе на подшипниках (на фиг.1 корпус и подшипники не показаны). С диаметрально противоположной стороны от эксцентрикового вала 9 у каждого из колес выполнены дополнительные зубчатые профили внутреннего зацепления 12 и 13. Они находятся в зацеплении с сателлитами 14, 15. Сателлиты посажены на подшипниках на валы 16 и 17, которые жестко связаны со свободными водилами 18 и 19. Каждое водило посажено на входном валу 24 на парах подшипников 20 и 21. Сателлиты 14 и 15 в пространстве расположены, под углом 180 градусов, т.е. противоположно друг к другу. Сателлиты 14 и 15 кроме колес внутреннего зацепления 12 и 13, находятся в зацеплении также с шестернями 22, 23, посаженными на валу 24, который является входным валом редуктора. Водила 18 и 19 выполнены со смещенными по фазе на 180 градусов эксцентричными участками 25 и 26, на которые на подшипниках 27 и 28 посажены пластины планетарных колес 1 и 2. Здесь следует отметить, что водила 18 и 19 при работе устройства будут вращаться как единое целое, поэтому их можно выполнить как одну деталь с двумя противоположными эксцентричными участками. Выполнение водил 18 и 19 раздельными облегчает сборку устройства.
Здесь описана конструкция механизма с двумя планетарными колесами. В механизме с тремя колесами эксцентриковый вал будет иметь три эксцентрика и каждое колесо будет иметь предварительную планетарную ступень, аналогичную по конструкции ступеням, показанным на фиг. 2, только с другими углами между эксцентриками, сателлитами и эксцентричными участками водила, в частности этот угол будет составлять 120 градусов.
Обратимся теперь к механизму, изображенному на фиг. 5 с двумя эксцентриковыми валами. Он предназначен для использования в редукторах, в которых есть потребность в двух режимах работы: скоростном и более медленном. Например, это может быть редуктор привода задвижки, где один из эксцентриковых валов используется для установки ручного дублера, а второй эксцентриковый вал служит для установки датчика угла поворота. Или есть необходимость при аварийном отключении быстро перекрыть задвижку, для этого на эксцентриковый вал устанавливают двигатель, и редуктор работает без дополнительной редукции от предварительной ступени. Данный механизм отличается от вышеописанного только тем, что имеет второй эксцентриковый вал, полностью идентичный первому. На фиг. 5 обозначения элементов предварительной ступени и одного из эксцентриковых валов такие же, как на фиг. 1. Соответствующие обозначения второго вала помечены значком '. На фиг. 5 видно только одно планетарное колесо 1 с зубчатым профилем внутреннего зацепления 3. Эксцентриковые валы 9 и 9' имеют каждое по паре эксцентриков, из которых виден только один из них 7 и 7'. На эксцентриках на подшипниках 5 и 5' посажены одна из пластин планетарного колеса 1. Следует иметь в виду, что последовательно за первым колесом 1 на аналогичных подшипниках на противолежащих эксцентриках валов 9 и 9' посажено второе планетарное колесо внутреннего зацепления, которые на фигуре не видны.
Рассмотрим работу механизма, изображенного на фиг. 1-4, на примере редуктора, входным валом которого является вал 24 с шестернями 22 и 23. Рассмотрим вначале взаимодействие элементов механизма с одним планетарным колесом, в частности с колесом 1. Планетарное колесо 1 кроме основного зубчатого профиля внутреннего зацепления 3 имеет дополнительный профиль внутреннего зацепления 12. Шестерня 22, находясь в зацеплении с сателлитом 14, передает ему вращение. Сателлит 14 начинает совершать обкатное движение вокруг шестерни 22. Сателлит одновременно взаимодействует с дополнительным зубчатым профилем внутреннего зацепления 12 на планетарном колесе 1. Этот профиль не может поворачиваться вокруг собственной оси, так как планетарное колесо с противоположной стороны посажено на эксцентрик 7 эксцентрикового вала 9. Поэтому обкатное движение сателлита 14 преобразуется в плоскопараллельное орбитальное движение планетарного колеса 1. Шестерня 22, сателлит 14 и зубчатый профиль 12 образуют предварительную планетарную ступень редуктора. В то же время, сателлит 14 посаженный на вал 16, жестко связанный со свободным водилом 18, начинает вращать его вокруг оси АА входного вала 24. Планетарное колесо 1, посажено на эксцентричный участок 25 свободного водила 18. Такая посадка при его плоскопараллельном орбитальном движение вокруг оси ВВ разгружает зубчатые профили шестерни 22, сателлита 14 и дополнительного венца внутреннего зацепления 12 от радиальной нагрузки. Зубчатый профиль внутреннего зацепления 3 планетарного колеса 1, взаимодействует с колесом внешнего зацепления 11, вызывая вращение колеса, являющегося выходным валом редуктора. Взаимодействие элементов второго планетарного колеса 2 со звеньями предварительной планетарной ступени (шестерня 23, дополнительный зубчатый профиль 13, свободное водило 26 с эксцентричным участком 19, сателлит 15, на валу 17) вызовет такое же движение планетарного колеса 2, только в противоположной фазе. Благодаря этому колесо внешнего зацепления 11 и выходной вал будут вращаться непрерывно без мертвых зон. Для того, чтобы сгладить пульсацию вращающего момента на выходе устройства целесообразно использовать не менее трех планетарных колес.
Работа устройства на фиг. 5 происходит аналогичным образом.
Передаточное отношение предлагаемого устройства будет определяться как произведение передаточных отношений предварительной ступени и планетарной передачи. Передаточное отношение предварительной ступени зависит от соотношения чисел зубьев колес 12 и 22. Передаточное отношение планетарной передачи зависит от чисел зубьев венцов внутреннего зацепления 3 и 4 и от числа зубьев колеса наружного зацепления 11. Таким образом, при равных с прототипом габаритах и нагрузочной способности общее передаточное отношение будет больше за счет передаточного отношения предварительной ступени.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| Планетарная передача с предварительной ступенью | 2022 |
|
RU2782006C1 |
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |
| Планетарный редуктор с внутренним зацеплением | 2024 |
|
RU2839170C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ПЛАНЕТАРНЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ С ДВОЙНЫМИ САТЕЛЛИТАМИ | 2008 |
|
RU2355923C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2345257C1 |


Изобретение относится к области машиностроения. Планетарный механизм содержит по меньшей мере два последовательно расположенных планетарных колеса, подшипниковые опоры которых расположены на эксцентриках по меньшей мере одного эксцентрикового вала. Эксцентрики вала сдвинуты друг относительно друга по фазе на равные углы. Каждое планетарное колесо имеет основной венец внутреннего зацепления, и все венцы внутреннего зацепления планетарных колёс находятся в зацеплении с одним колесом внешнего зацепления. Каждое планетарное колесо снабжено одной предварительной планетарной ступенью, для чего на каждом планетарном колесе выполнен дополнительный внутренний зубчатый профиль, смещённый относительно основного и находящийся в зацеплении с сателлитом, посаженным на свободное водило. Сателлит находится в зацеплении с шестерней на входном валу механизма, а каждое планетарное колесо посажено на подшипниках на эксцентричный участок свободного водила, причём эксцентричные участки на водилах планетарных колёс сдвинуты по фазе друг относительно друга на равные углы. Обеспечивается увеличение передаточного отношения планетарного механизма при сохранении малых массо-габаритных характеристик. 5 ил.
Планетарный механизм, содержащий по меньшей мере два последовательно расположенных планетарных колеса, подшипниковые опоры которых расположены на эксцентриках по меньшей мере одного эксцентрикового вала, причём эксцентрики вала сдвинуты друг относительно друга по фазе на равные углы, каждое планетарное колесо имеет основной венец внутреннего зацепления и все венцы внутреннего зацепления планетарных колёс находятся в зацеплении с одним колесом внешнего зацепления, отличающийся тем, что каждое планетарное колесо снабжено одной предварительной планетарной ступенью, для чего на каждом планетарном колесе выполнен дополнительный внутренний зубчатый профиль, смещённый относительно основного и находящийся в зацеплении с сателлитом, посаженным на свободное водило, сателлит находится в зацеплении с шестерней на входном валу механизма, а каждое планетарное колесо посажено на подшипниках на эксцентричный участок свободного водила, причём эксцентричные участки на водилах планетарных колёс сдвинуты по фазе друг относительно друга на равные углы.
| МНОГОПРИВОДНЫЙ ПЛАНЕТАРНО-ЦЕВОЧНЫЙ МОТОР-РЕДУКТОР | 2014 |
|
RU2581107C2 |
| ЦЕНТРОБЕЖНАЯ МУФТА | 1995 |
|
RU2089763C1 |
| DE 4447210 A1, 03.08.1995. | |||

