Настоящее изобретение относится к поршневому компрессору.
Более конкретно, но без ограничений, изобретение относится к поршневому компрессору высокой мощности, например с мощностью в пределах от 30 кВт до 600 кВт или выше.
Такие поршневые компрессоры используются, например, для сжатия газов при очень высоком рабочем давлении, например, равном 2000 кПа или более.
Обычно поршневой компрессор содержит поршневой компрессорный элемент, который представляет собой корпус с камерой сжатия, в которой расположен поршень с возможностью возвратно-поступательного перемещения в осевом направлении между верхней мертвой точкой и нижней мертвой точкой посредством ведущего вала, приводимого в движение роторным двигателем, и в котором между данным ведущим валом и поршнем предусмотрена кинематическая передача в виде кривошипно-шатунного механизма, и возможно также дополнительный поршневой шток, который перемещается поступательно вместе с упомянутым поршнем и образует соединение между поршнем и кривошипно-шатунным механизмом.
Для реализации таких высоких давлений газа обычно используют многоступенчатый компрессор с двумя или несколькими вышеупомянутыми поршневыми компрессорными элементами, которые последовательно соединены друг с другом через их впуски газа и их выпуски газа, и которые закреплены на общем приводе в виде корпуса, в котором поддерживается общий ведущий вал, с кривошипно-шатунным механизмом, соединенным с каждым поршневым компрессорным элементом, и возможно поршневым штоком для соединения поршней с кривошипно-шатунным механизмом.
Упомянутый привод представляет собой роторный двигатель, обычно электрический двигатель, для приведения в движение общего ведущего вала, в большинстве случаев через ременный привод. Преимуществом такого ременного привода является относительная низкая стоимость, однако он имеет также недостаток в том, что он вызывает относительно большие потери мощности, достигающие 3-5% номинальной мощности двигателя.
Совершенно очевидно, что привод должен быть выполнен так, чтобы использовать полную мощность двигателя и соответственно также его полную мощность сжатия, и поэтому в случае поршневого компрессора с высокой мощностью он относительно тяжелый и массивный.
С учетом больших механических усилий, действующих в кривошипно-шатунном механизме, обычно используются подшипники жидкостного трения, которые могут вызывать потери мощности в пределах от 5 до 10% и которые к тому же требуют сложной системы впрыска для того чтобы в любом случае снабжать подшипники достаточным количеством масла.
Для предотвращения утечки газа в корпус привода и выхода через ведущий вал используют специально разработанные осевые уплотнения, в силу чего корпус никогда не может быть вполне герметично уплотнен.
Ранее известна также заявка поршневого компрессора, в которой поршень перемещается возвратно-поступательно посредством электромагнитной активации, чтобы сжимать газ в камере сжатия. Однако данная заявка ограничена малыми мощностями. Научные исследования более высоких мощностей привели к очень тяжелым и массивным компрессорам, например, с поршнем массой 400 кг для компрессора мощностью 30 кВт.
Кроме того, данная заявка требует более сложного управления движением с большими запасами безопасности, для того чтобы предотвратить столкновение между головкой поршня и торцевой стенкой камеры сжатия в конце хода сжатия. Учитывая данный большой запас безопасности, при достижении верхней мертвой точки всегда должен быть достаточный промежуток между поршнем и торцевой стенкой камеры сжатия, который приводит к уменьшению области применения поршневого компрессора, поскольку он позволяет создавать меньшее давление по сравнению с теоретически возможным при меньшем запасе безопасности, а также приводит к меньшему объемному коэффициенту полезного действия.
Из уровня техники известен документ EP 0566959, 27.10.1993, который раскрывает компрессор, в котором головка 3 поршня снабжена постоянным магнитом 4, который взаимодействует с электромагнитом 5, расположенным перед головкой 3 поршня в концевой части цилиндра 2.
Задачей настоящего изобретения является предложение решения для устранения одного или более вышеупомянутых и других недостатков.
Для этих целей, изобретение относится к поршневому компрессору, содержащему в себе корпус с камерой сжатия, содержащей впуски выпуск и поршень, расположенный с возможностью возвратно-поступательного перемещения в осевом направлении в камере сжатия между верхней мертвой точкой и нижней мертвой точкой посредством привода, ограниченного кинематическим механизмом, с которым соединен упомянутый поршень, причем упомянутый привод образован исключительно посредством электромагнитного линейного привода поршня.
Поскольку упомянутый поршень или поршни больше не приводятся в движение посредством кривошипно-шатунного механизма, как принято, роторный двигатель больше не требуется, и привод с кривошипно-шатунным механизмом может быть выполнен более компактным, легким и менее дорогим.
Кроме того, такой поршневой компрессор в соответствии с изобретением значительно более эффективный, благодаря устранению потерь в двигателе и ременном приводе, и поскольку традиционные «гидродинамические подшипники» могут быть заменены более обычными подшипниками с меньшими потерями, которые к тому же не требуют смазки, в отличие от закрытых подшипников с консистентной смазкой, таких как роликовые подшипники с консистентной смазкой, т.е. подшипников с роликами, которые заключены в полости между внутренним кольцом и внешним кольцом, которая заполнена консистентной смазкой, однако возможность использования «меньших» гидродинамических подшипников также остается.
Обеспечение кинематического механизма гарантирует отсутствие риска столкновения поршня в его верхней мертвой точке в конце хода сжатия с торцевой стенкой камеры сжатия, так что может быть использован очень малый запас безопасности, позволяющий поршню очень близко подходить к данной концевой стенке, с минимальным промежутком между ними. Это полезно, потому что чем меньше данный промежуток, тем больше установленное давление газа в камере сжатия и соответственно больше область применения компрессоров.
Вследствие этого поршневой компрессор в соответствии с изобретением не требует также сложных средств управления для поддержания минимального промежутка.
Любые небольшие отклонения в конце хода сжатия поглощаются кинематическим механизмом, который не позволяет поршню перемещаться за пределы его верхней мертвой точки.
Предпочтительно, поршень приводится в движение с частотой, приблизительно соответствующей собственной частоте поршневого компрессора, конкретно с собственной частотой совокупности поршня и кинематического механизма в сочетании с пневматической, механической или электромеханической пружиной. Это обеспечивает энергетически более эффективное сжатие газа.
Упомянутый кинематический механизм предпочтительно содержит простой обычный кривошипно-шатунный механизм с кривошипом, который выполнен с возможностью вращения вокруг кривошипного вала, перпендикулярного направлению прямолинейного перемещения поршня, а также шатуном с шарнирным соединением в одном конце с кривошипом посредством кривошипного пальца и шарнирным соединением в его другом конце с поршнем посредством поршневого пальца, причем кривошипный вал, кривошипный палец и поршневой палец предпочтительно поддерживаются посредством закрытых подшипников с консистентной смазкой.
Поскольку корпус поршневого компрессора не содержит входного или выходного вала для приведения в движение поршня и поскольку внешняя смазка подшипников не требуется, корпус может быть вполне герметично уплотнен при очевидном исключении впуска газа и выпуска газа в и из камеры сжатия.
Электромагнитный привод может содержать прямой электромагнитный привод, оказывающий прямое электромагнитное действие на поршень через одну или несколько электрических обмоток вокруг камеры сжатия.
Дополнительно или в качестве альтернативы, электромагнитный привод может содержать непрямой электромагнитный привод поршня, с плунжером, который соединен с поршнем и перемещается возвратно-поступательно синхронно с ним в линейной направляющей или корпусе, которая(ый) проходит параллельно осевому направлению камеры сжатия, и с одной или несколькими обмотками, расположенными вокруг упомянутой линейной направляющей, которые способны взаимодействовать посредством индукции с соответствующим плунжером.
Изобретение относится также к многоступенчатому поршневому компрессору с по меньшей мере двумя камерами сжатия, последовательно соединенными друг с другом посредством их впуска и выпуска, и в которых поршень выполнен с возможностью возвратно-поступательного перемещения посредством линейного электромагнитного привода, причем каждый поршень соединен со своим собственным кинематическим механизмом.
В данном случае возможно, по меньшей мере два из упомянутых кинематических механизмов механически соединены друг с другом так, что они перемещаются синхронно. В случае кривошипно-шатунного механизма, кривошипы этих по меньшей мере двух механизмов закреплены на общем кривошипном валу.
Согласно формуле изобретения заявлен поршневой компрессор, содержащий корпус с камерой сжатия в нем, имеющей впуск и выпуск и поршень, расположенный с возможностью возвратно-поступательного перемещения в осевом направлении (Х-Х') в камере сжатия между верхней мертвой точкой и нижней мертвой точкой, ограниченный кинематическим механизмом, с которым соединен поршень, отличающийся тем, что привод образован исключительно посредством электромагнитного линейного привода поршня, при этом электромагнитный линейный привод содержит непрямой электромагнитный привод поршня с плунжером, расположенным с возможностью возвратно-поступательного перемещения в линейной направляющей, которая проходит параллельно осевому направлению (Х-Х') камеры сжатия, и причем одна или более обмоток расположены вокруг или вдоль линейной направляющей и способны взаимодействовать посредством индукции с плунжером, при этом по меньшей мере один из поршня, плунжера, цилиндрического кожуха или направляющей содержит один или более магнитов, при этом один или более из этих магнитов представляют собой постоянные магниты.
Предпочтительно электромагнитный линейный привод содержит прямой электромагнитный привод поршня с одной или несколькими электрическими обмотками, расположенными вокруг камеры сжатия, способными взаимодействовать посредством индукции с поршнем.
Предпочтительно направляющая плунжера расположена в осевом продолжении (Х-Х') камеры сжатия, и тем, что плунжер расположен на штоке, который механически прочно соединен с поршнем и перемещается возвратно-поступательно синхронно с линейным перемещением поршня.
Предпочтительно кинематический механизм содержит кривошипно-шатунный механизм с кривошипом, который выполнен с возможностью вращения вокруг кривошипного вала, перпендикулярного направлению линейного перемещения поршня, а также шатуном с шарнирным соединением на одном конце с кривошипом посредством кривошипного пальца и шарнирным соединением на его другом конце с поршнем посредством поршневого пальца.
Предпочтительно поршень соединен с кривошипно-шатунным механизмом посредством линейного поршневого штока, соединенного с поршнем и перемещающегося возвратно-поступательно синхронно с поршнем.
Предпочтительно поршневой компрессор содержит блок управления для активации электромагнитного привода во время всего хода сжатия поршня от нижней мертвой точки до верхней мертвой точки поршня.
Предпочтительно корпус не содержит входного или выходного вала для приведения в движение поршня.
Предпочтительно кинематический механизм представляет собой кривошипно-шатунный механизм с кривошипным валом, кривошипным пальцем и поршневым пальцем, которые поддерживаются исключительно посредством закрытых роликовых подшипников.
Предпочтительно корпус поршневого компрессора с содержащейся в нем камерой сжатия с поршнем и кинематическим механизмом представляет собой герметично уплотненный корпус.
Предпочтительно частота возвратно-поступательного перемещения поршня соответствует собственной частоте поршневого компрессора, конкретно совокупности поршня и кинематического механизма в сочетании с пневматической, механической или электромеханической пружиной.
Предпочтительно поршневой компрессор представляет собой многоступенчатый поршневой компрессор с по меньшей мере двумя камерами сжатия, которые последовательно соединены друг с другом посредством их впуска и выпуска, и в котором поршень выполнен с возможностью возвратно-поступательного перемещения посредством линейного электромагнитного привода и в котором каждый поршень соединен со своим собственным кинематическим механизмом.
Предпочтительно по меньшей мере два из упомянутых кинематических механизмов механически соединены друг с другом, вынуждая их перемещаться синхронно друг с другом.
Предпочтительно кинематический механизм представляет собой кривошипно-шатунный механизм, то кривошипы по меньшей мере двух их этих механизмов расположены на общем кривошипном валу.
Предпочтительно поршневой компрессор представляет собой поршневой компрессор с максимальной мощностью сжатия, которая больше 30 кВт.
Для более наглядной демонстрации признаков настоящего изобретения ниже описаны, для пояснения и без какого-либо ограничения, некоторые примеры поршневого компрессора в соответствии с изобретением со ссылкой на сопроводительные чертежи, из которых
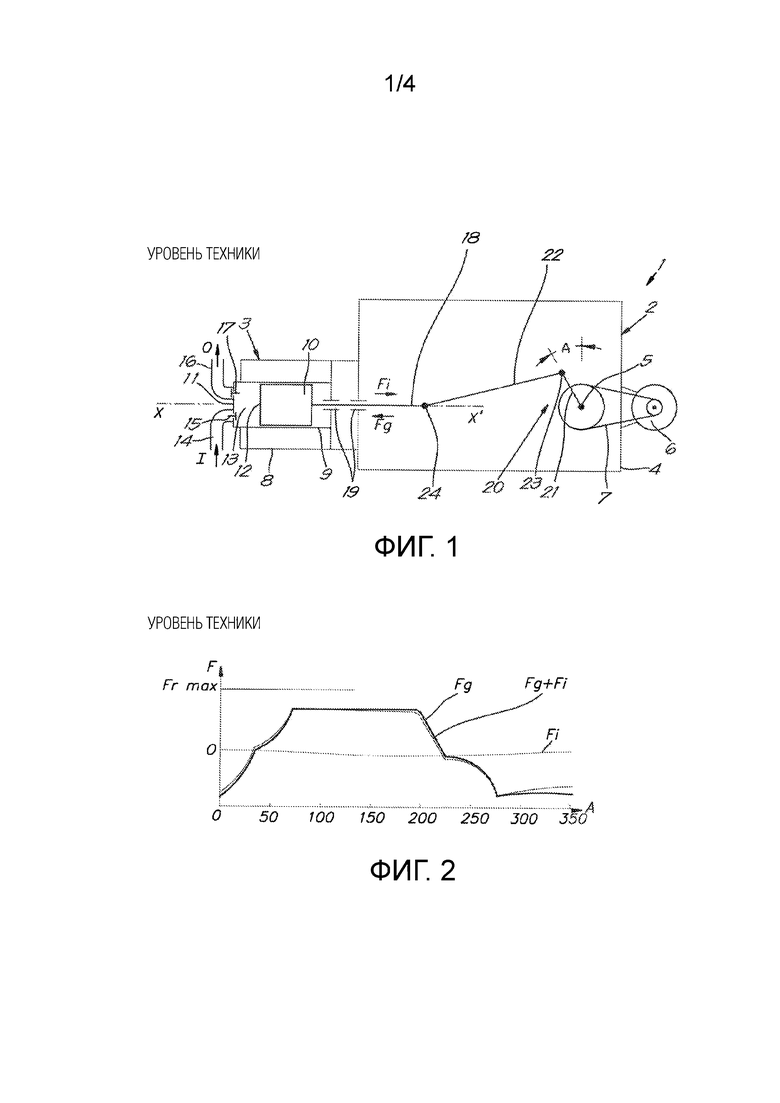
Фиг. 1 схематично показывает обычный поршневой компрессор.
Фиг. 2 показывает график сил, действующих при использовании поршневого компрессора, показанного на фиг. 1.
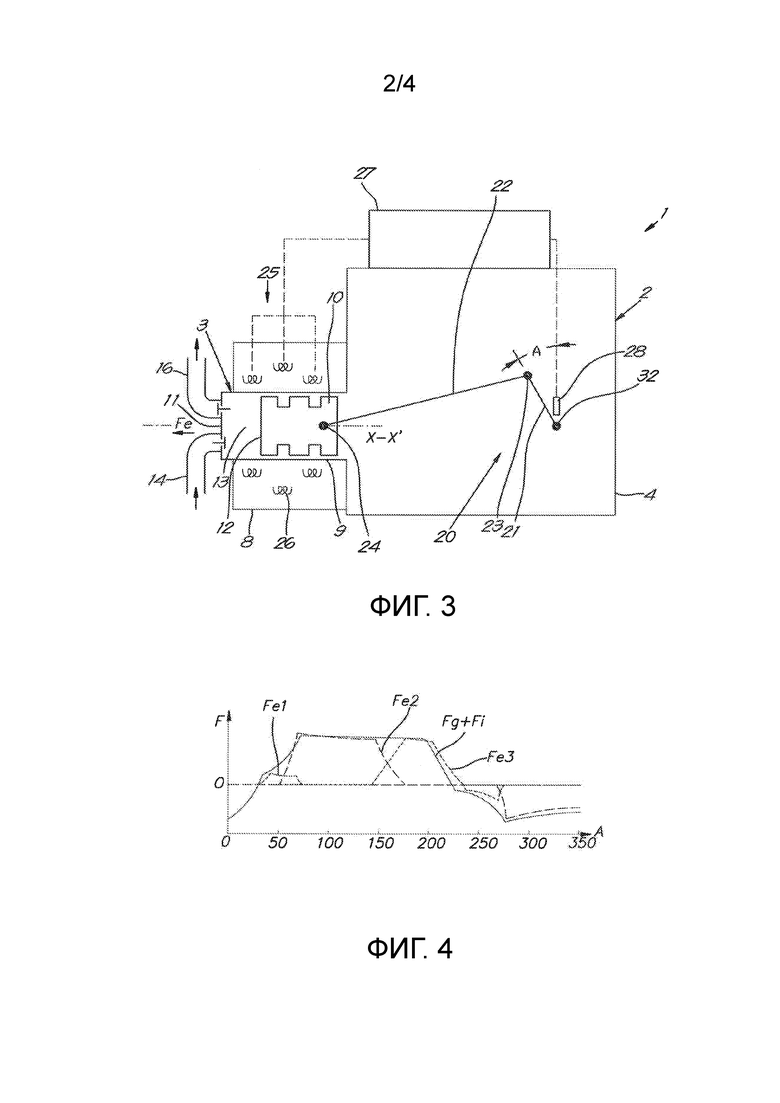
Фиг. 3 представляет собой схематическое изображение поршневого компрессора в соответствии с изобретением.
Фиг. 4 показывает график сил, действующих на поршень поршневого компрессора, показанного на фиг. 3, вместе с силами графика фиг. 2, в целях сравнения.
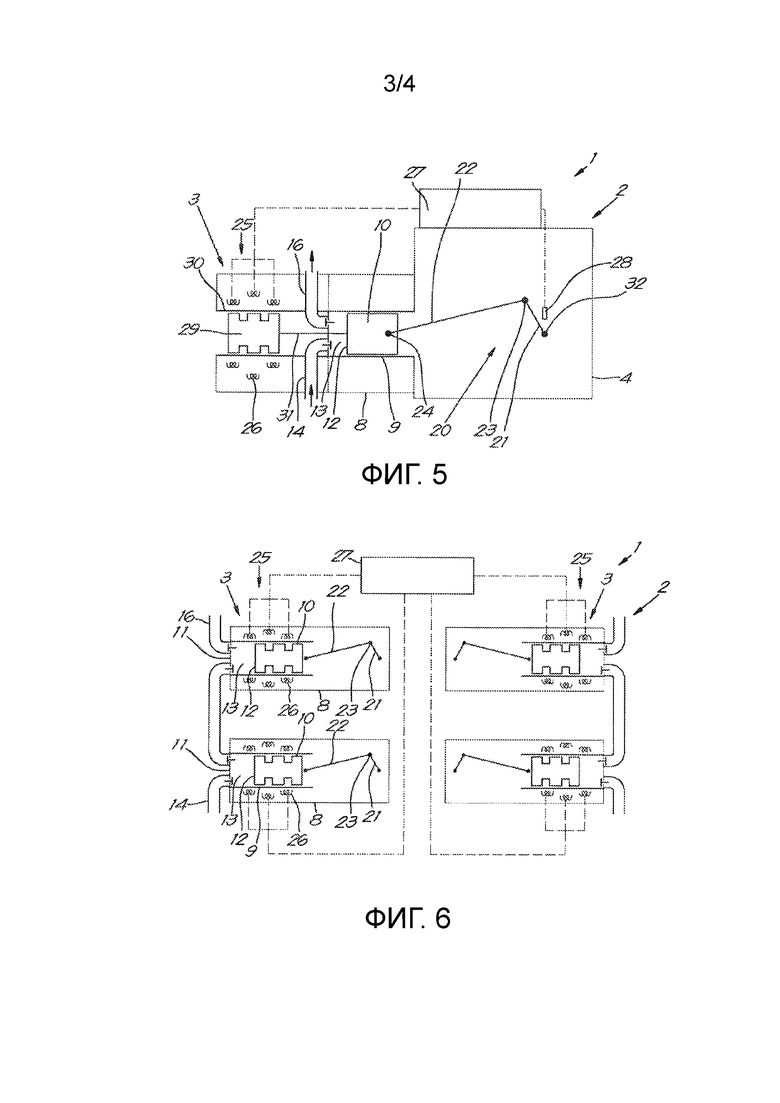
Фиг. 5 показывает вариант осуществления поршневого компрессора в соответствии с изобретением.
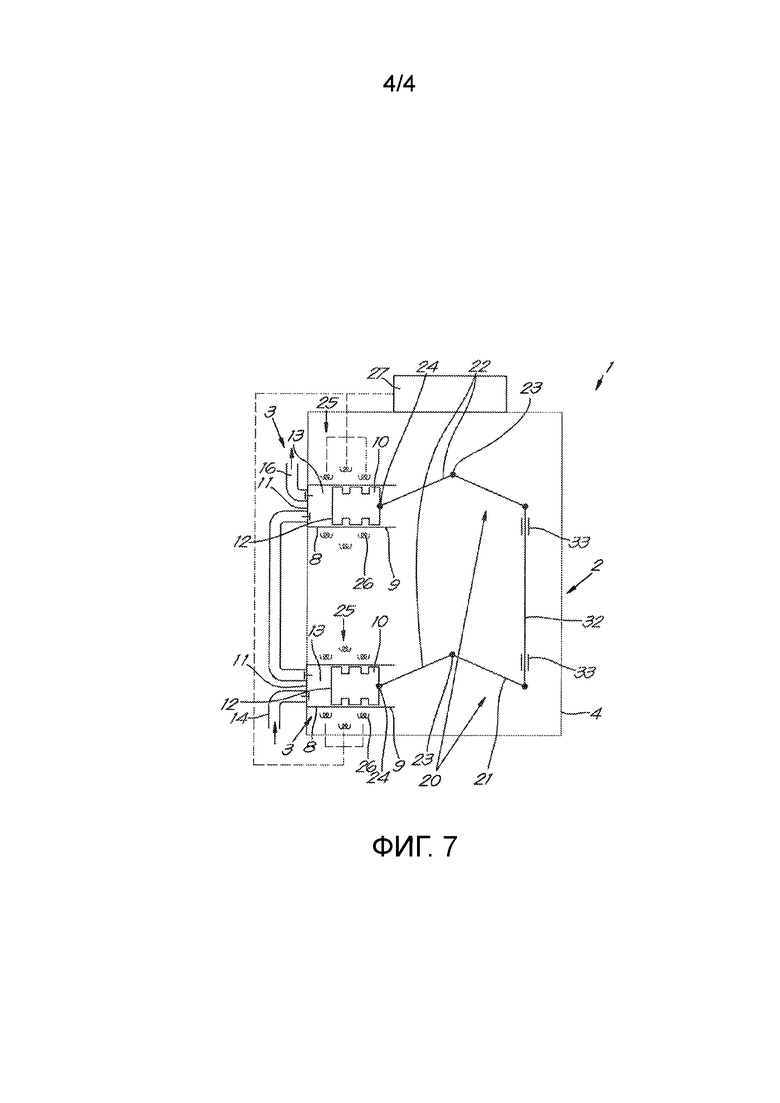
Фиг. 6 и 7 показывают два разных варианта многоступенчатого поршневого компрессора в соответствии с изобретением.
Известный из уровня техники поршневой компрессор 1, показанный на фиг. 1, содержит привод 2 и закрепленный на нем поршневой компрессорный элемент 3.
Привод 2 содержит корпус 4, в котором ведущий вал 5 закреплен с возможностью вращения и приводится в движение посредством электрического роторного двигателя 6 через ременную передачу 7.
Поршневой компрессорный элемент 3 содержит корпус 8, закрепленный на корпусе 4 привода 2, содержащий цилиндрический кожух 9, в котором расположен поршень 10 с возможностью возвратно-поступательного перемещения в осевом направлении Х-Х', и который с одной стороны закрыт торцевой стенкой 11.
Между поршневой головкой 12, вышеупомянутой торцевой стенкой 11 и цилиндрическим корпусом 8 поршневого компрессорного элемента 3 расположена камера 13 сжатия, соединенная известным способом через уплотняемый впуск 14 с впускным клапаном 15 и через уплотняемый выпуск 16 с выпускным клапаном 17 с окружающей средой для всасывания газа для сжатия, как показано стрелкой I, и для нагнетания газа в конце хода сжатия в направлении стрелки О.
Во время хода сжатия, поршень 10 перемещается из так называемой нижней мертвой точки, удаленной от торцевой стенки 11, в направлении торцевой стенки 11 в так называемую верхнюю мертвую точку, расположенную около торцевой стенки 11, и осуществляет это при закрытых впускном клапане 15 и выпускном клапане 17.
В верхней мертвой точке объем камеры 13 сжатия, так называемый мертвый объем, минимальный, а давление газа в камере 13 сжатия в этот момент высокое.
С поршнем 10 соединен поршневой шток 18, проходящий в осевом направлении Х-Х' и выполненный с возможностью возвратно-поступательного перемещения синхронно с поршнем 10 в уплотнительной направляющей 19 корпуса, которая образует газонепроницаемое уплотнение между корпусом 8 поршневого компрессорного элемента 3 и корпусом 4 привода 2 для предотвращения утечки сжатого газа через корпус 4 привода 2 и проходное отверстие ведущего вала.
Между поршневым штоком 18 и ведущим валом 5 предусмотрен кинематический механизм 20 для преобразования вращательного движения ведущего вала 5 в возвратно-поступательное перемещение поршня 10.
В случае фиг. 1 данный кинематический механизм представляет собой кривошипно-шатунный механизм с радиально направленным кривошипом 21, который вращается вместе с ведущим валом 5, и шатуном 22, который поворотно соединен в одном конце с кривошипом 21 посредством кривошипного пальца 23, а в другом конце с поршнем 10 или поршневым штоком 18 посредством поршневого пальца 24.
Поршневой компрессор в соответствии с известным уровнем техники работает следующим образом.
Ведущий вал 5 приводится в движение двигателем 6 в одном направлении, так что кривошип 21 приводится во вращение, а поршень 10 перемещается возвратно-поступательно.
При любом ходе всасывания от верхней мертвой точки до нижней мертвой точки, газ всасывается в камеру 13 сжатия через впуск 14, а при любом перемещении в обратном направлении от нижней мертвой точки до верхней мертвой точки, всасываемый газ подвергается сжатию, когда впускной клапан 15 и выпускной клапан 17 закрыты.
Во время работы поршневой шток 18 и поршневой палец 24 подвергаются воздействию газовых сил Fg и синусоидальных сил Fi инерции с их гармониками, как показано на фиг. 1, мгновенное значение которых показано на графике фиг. 2 в зависимости от угла А поворота кривошипа 21. Газовая сила Fg очевидно пропорциональна требуемому рабочему давлению поршневого компрессора 1.
На данном графике показана также результирующая сила Fg+Fi, действующая на поршневой шток 18 и на поршневой палец 24, которая равна сумме сил Fg и Fi. Во время хода сжатия поршня 10 это сила сжатия, посредством которой шток 18 поршня подвергается сжатию.
Предполагается, что данная результирующая сила не может быть больше некоторой максимальной величины Frmax, которая определяется преимущественно прочностью на сжатие поршневого штока 18 и/или прочностью поршневого пальца 24 и которая часто является ограничивающим фактором для проектирования, или выбора, поршневого компрессора в зависимости от требуемого рабочего давления, и привод должен выбираться с поршневым штоком и поршневым пальцем, которые обладают достаточной прочностью для выдерживания требуемого давления газа.
Как схематично показано на фиг. 3, поршневой компрессор 1 в соответствии с изобретением отличается от обычного поршневого компрессора 1, показанного на фиг. 1, тем, что в случае изобретения отсутствует двигатель 6 для приведения в движение поршня 10 через кинематический механизм 20, а привод поршня 10 образован исключительно посредством электромагнитного линейного привода 25 поршня 10.
В данном случае поршень также соединен с кинематическим механизмом непосредственно, то есть без промежуточного поршневого штока.
Электромагнитный линейный привод 25 образован посредством одной или нескольких электрических обмоток 26, расположенных вокруг или вдоль цилиндрической камеры 13 и которые, будучи возбужденными блоком 27 управления, непосредственно и посредством индукции создают осевую силу Fe, действующую на поршень 10, который для этой цели выполнен из соответствующего магнитопроводящего материала, или, например, может содержать один или несколько постоянных магнитов, в данном случае не показанных.
В случае фиг. 3 предусмотрены три обмотки 26, которые выполнены с возможностью возбуждения отдельно или совместно для приложения некоторой силы к поршню 10, чтобы перемещать его возвратно-поступательно соответствующим образом, включая газ, который должен подвергаться сжатию в камере 13 сжатия.
Для этих целей поршневой компрессор 1 содержит средство 28 для определения текущего положения поршня 10, например, в виде средства для измерения угла А кривошипа 21 в данный момент, каковое средство соединено с блоком 27 управления.
В зависимости от измеренного угла А, каждая из обмоток 26 возбуждается отдельно, чтобы во время вращения кривошипа 21 подвергать поршень воздействию трех электромагнитных сил Fe1, Fe2 и Fe3, как показано на графике фиг. 4, при этом кривые этих трех сил Fe1, Fe2 и Fe3 со временем могут перекрываться друг с другом, чтобы оптимально приближаться к графику сил Fg+Fi, показанному на фиг. 2, для того чтобы создавать результирующую силу, которая гарантирует, что в верхней и нижней мертвых точках направление результирующей силы будет встречным.
Управляющая программа блока 27 управления необязательно должна быть очень точной, поскольку кинематический механизм 20 накладывает ограничение на возвратно-поступательные перемещения поршня 10 между нижней и верхней мертвыми точками таким образом, что отсутствует риск столкновения поршня 10 с торцевой стенкой 11 в конце хода сжатия, даже в случае небольшого отклонения от кривой результирующей силы, которое будет препятствовать изменению направления результирующей силы при достижении верхней или нижней мертвой точки.
Таким образом, нет необходимости учитывать большой запас безопасности для проектирования блока управления, благодаря чему мертвый объем между поршнем 10 и торцевой стенкой 11 камеры 13 сжатия может быть уменьшен до минимума, обеспечивая возможность реализации более высоких давлений.
Частота возвратно-поступательного перемещения поршня предпочтительно соответствует собственной частоте поршневого компрессора, конкретно совокупности поршня 10 и кинематического механизма 20 в сочетании с пневматической, механической или электромеханической пружиной, например, образованной посредством сжатого воздуха в камере 13 сжатия, благодаря чему может быть осуществлено энергетически эффективное сжатие.
Поскольку в случае изобретения двигатель 6 и ременная передача 7 отсутствуют, кинематический механизм 20 не должен передавать силы для приведения в движение поршня 10, и вследствие этого данный кинематический механизм 20 может быть выполнен значительно более легким и менее прочным, а требования к подшипникам и смазке данного кинематического механизма 20 могут быть существенно снижены.
По той же причине внутреннее пространство, которое ограничено корпусами 4 и 8, может быть герметично закрыто поршнем.
Очевидно, что поршень 10 может быть соединен с кинематическим механизмом 20 посредством поршневого штока 18, соединенного с поршнем 10. Поскольку поршень не приводится в движение посредством данного поршневого штока 18, действующие не него силы значительно меньше, чем в случае обычного поршневого компрессора, приводимого в действие роторным двигателем.
Фиг. 5 показывает вариант поршневого компрессора 1 в соответствии с изобретением, в котором в данном случае поршень 10 представляет собой обычный поршень без обмоток 26 вокруг цилиндрического кожуха 9, но в котором электромагнитный привод 25 поршня 10 реализован посредством внешнего плунжера 29, который расположен с возможностью возвратно-поступательного перемещения в линейной направляющей 30, с одной или несколькими обмотками 26, расположенными вокруг нее, способными взаимодействовать посредством индукции с соответствующим плунжером 29, будучи возбужденными, чтобы непрямо приводить в движение поршень 10 посредством электромагнитной индукции через соединительный шток 31, который проходит наружу через камеру 13 сжатия и вышеупомянутую торцевую стенку 11.
Очевидно, что возможна также комбинация прямого усиления поршня 10 с непрямым усилением через внутренний или внешний плунжер 29.
Кроме того, можно выполнить поршень 10 и один или несколько плунжеров 29 как линейный двигатель, более конкретно как линейный шаговый двигатель.
Фиг. 6 показывает многоступенчатый поршневой компрессор 1 с четырьмя ступенями, каждая содержащая поршень 10, который приводится в движение посредством электромагнитной индукции в своей собственной камере 13 сжатия, причем камеры 13 сжатия последовательно соединены друг с другом посредством их впуска 14 и выпуска 16.
В данном случае каждый поршень 10 вместе со своим собственным кинематическим механизмом 20 расположен в своем собственном герметично уплотненном корпусе 4-8.
В данном случае блок 27 управления является общим для четырех поршней 10.
Фиг. 7 показывает многоступенчатый поршневой компрессор 1 с двумя ступенями, расположенными в общем герметично закрытом корпусе 4-8, каждый содержащий поршень 10 и свой собственный кинематический механизм 20, но в котором два кинематических механизма 20 механически соединены друг с другом, в этом случае поскольку кривошипы 21 расположены на общем кривошипном валу 32, который поддерживается в корпусах 4-8 на обычных шариковых подшипниках 33.
Настоящее изобретение никак не ограничено описанными выше и показанными в чертежах вариантами осуществления. Вернее поршневой компрессор в соответствии с изобретением может быть реализован в разных вариантах без отхода от объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВОЙ КОМПРЕССОР И СПОСОБ СЖАТИЯ ГАЗА ПОСРЕДСТВОМ НЕГО | 2019 |
|
RU2775102C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2030608C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОРШНЕВОЙ МАШИНОЙ С РЕГУЛИРОВАНИЕМ ХОДА ПОРШНЯ И ПОРШНЕВАЯ МАШИНА | 1998 |
|
RU2121580C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2516040C2 |
| БЕСШАТУННЫЙ ОППОЗИТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2482301C1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2023 |
|
RU2800201C1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2020 |
|
RU2739105C1 |
| СПОСОБ УПРАВЛЕНИЯ АКСИАЛЬНО-ПОРШНЕВЫМ ДВИГАТЕЛЕМ И АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2016 |
|
RU2628831C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2525995C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2166653C2 |
Изобретение относится к поршневому компрессору. Компрессор (1) содержит корпус (8) с камерой (13) сжатия и поршень (10), расположенный в камере (13) и соединенный с кинематическим механизмом (20). Привод образован посредством электромагнитного линейного привода (25) поршня (10). Привод (25) содержит непрямой электромагнитный привод поршня (10) с плунжером (29), расположенным с возможностью возвратно-поступательного перемещения в линейной направляющей (30). Одна или более обмоток (26) расположены вокруг или вдоль направляющей (30) и способны взаимодействовать посредством индукции с плунжером (29). По меньшей мере один из поршня (10), плунжера (29), цилиндрического кожуха (9) или направляющей (30) содержит один или более магнитов. Один или более из этих магнитов представляют собой постоянные магниты. Изобретение направлено на выполнение эффективного компрессора с компактным легким приводом, не требующим сложных средств управления. 13 з.п. ф-лы, 7 ил.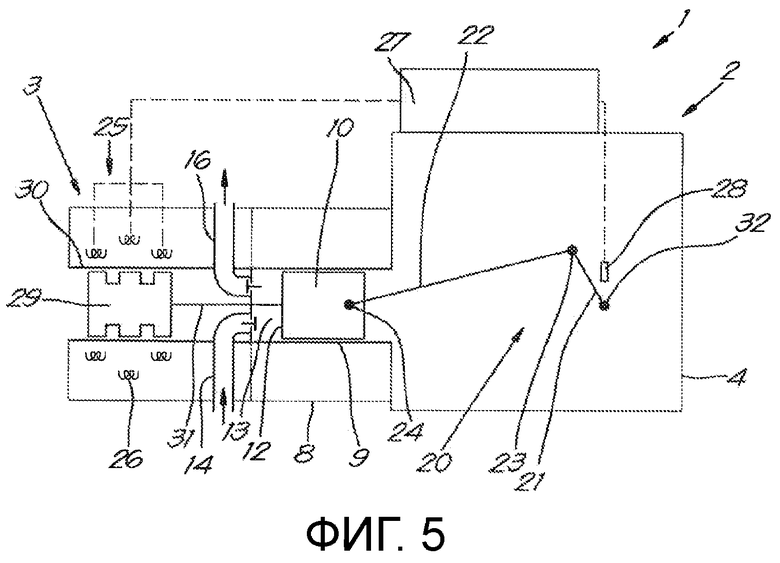
1. Поршневой компрессор, содержащий корпус (8) с камерой (13) сжатия в нем, имеющей впуск и выпуск и поршень (10), расположенный с возможностью возвратно-поступательного перемещения в осевом направлении (Х-Х') в камере (13) сжатия между верхней мертвой точкой и нижней мертвой точкой, ограниченный кинематическим механизмом (20), с которым соединен поршень (10), отличающийся тем, что привод образован исключительно посредством электромагнитного линейного привода (25) поршня (10), при этом электромагнитный линейный привод (25) содержит непрямой электромагнитный привод поршня (10) с плунжером (29), расположенным с возможностью возвратно-поступательного перемещения в линейной направляющей (30), которая проходит параллельно осевому направлению (Х-Х') камеры (13) сжатия, и причем одна или более обмоток (26) расположены вокруг или вдоль линейной направляющей (30) и способны взаимодействовать посредством индукции с плунжером (29), при этом по меньшей мере один из поршня (10), плунжера (29), цилиндрического кожуха (9) или направляющей (30) содержит один или более магнитов, при этом один или более из этих магнитов представляют собой постоянные магниты.
2. Поршневой компрессор по п. 1, отличающийся тем, что электромагнитный линейный привод (25) содержит прямой электромагнитный привод поршня (10) с одной или несколькими электрическими обмотками (26), расположенными вокруг камеры (13) сжатия, способными взаимодействовать посредством индукции с поршнем (10).
3. Поршневой компрессор по п. 1 или 2, отличающийся тем, что направляющая (30) плунжера (29) расположена в осевом продолжении (Х-Х') камеры (13) сжатия, и тем, что плунжер (29) расположен на штоке (18), который механически прочно соединен с поршнем (10) и перемещается возвратно-поступательно синхронно с линейным перемещением поршня (10).
4. Поршневой компрессор по любому из предыдущих пунктов, отличающийся тем, что кинематический механизм (20) содержит кривошипно-шатунный механизм с кривошипом (21), который выполнен с возможностью вращения вокруг кривошипного вала (32), перпендикулярного направлению линейного перемещения поршня (10), а также шатуном (22) с шарнирным соединением на одном конце с кривошипом (21) посредством кривошипного пальца (23) и шарнирным соединением на его другом конце с поршнем (10) посредством поршневого пальца (24).
5. Поршневой компрессор по п. 4, отличающийся тем, что поршень (10) соединен с кривошипно-шатунным механизмом посредством линейного поршневого штока (18), соединенного с поршнем (10) и перемещающегося возвратно-поступательно синхронно с поршнем (10).
6. Поршневой компрессор по любому из предыдущих пунктов, отличающийся тем, что поршневой компрессор (1) содержит блок (27) управления для активации электромагнитного привода (25) во время всего хода сжатия поршня (10) от нижней мертвой точки до верхней мертвой точки поршня (10).
7. Поршневой компрессор по любому из предыдущих пунктов, отличающийся тем, что корпус (8) не содержит входного или выходного вала для приведения в движение поршня (10).
8. Поршневой компрессор по любому из предыдущих пунктов, отличающийся тем, что кинематический механизм (20) представляет собой кривошипно-шатунный механизм с кривошипным валом (32), кривошипным пальцем (23) и поршневым пальцем (24), которые поддерживаются исключительно посредством закрытых роликовых подшипников.
9. Поршневой компрессор по любому из предыдущих пунктов, отличающийся тем, что корпус (8) поршневого компрессора (1) с содержащейся в нем камерой сжатия с поршнем и кинематическим механизмом (20) представляет собой герметично уплотненный корпус.
10. Поршневой компрессор по любому из предыдущих пунктов, отличающийся тем, что частота возвратно-поступательного перемещения поршня (10) соответствует собственной частоте поршневого компрессора (1), конкретно совокупности поршня (10) и кинематического механизма (20) в сочетании с пневматической, механической или электромеханической пружиной.
11. Поршневой компрессор по любому из предыдущих пунктов, отличающийся тем, что он представляет собой многоступенчатый поршневой компрессор (1) с по меньшей мере двумя камерами (13) сжатия, которые последовательно соединены друг с другом посредством их впуска (14) и выпуска (16), и в котором поршень (10) выполнен с возможностью возвратно-поступательного перемещения посредством линейного электромагнитного привода (25) и в котором каждый поршень (10) соединен со своим собственным кинематическим механизмом (20).
12. Поршневой компрессор по п. 11, отличающийся тем, что по меньшей мере два из упомянутых кинематических механизмов механически соединены друг с другом, вынуждая их перемещаться синхронно друг с другом.
13. Поршневой компрессор по п. 12, отличающийся тем, что если кинематический механизм (20) представляет собой кривошипно-шатунный механизм, то кривошипы (21) по меньшей мере двух из этих механизмов (20) расположены на общем кривошипном валу (32).
14. Поршневой компрессор по любому из предыдущих пунктов, отличающийся тем, что он представляет собой поршневой компрессор (1) с максимальной мощностью сжатия, которая больше 30 кВт.
| Криогенная вакуумная камера | 1975 |
|
SU566959A1 |
| DE 102006060147 A1, 19.06.2008 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 2012098357 A1, 26.04.2012 | |||
| DE 4129018 A1, 04.03.1993 | |||
| Электромагнитный привод для поршневого компрессора | 2013 |
|
RU2623010C2 |
| ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 0 |
|
SU183290A1 |

