Изобретение относится к области ядерной техники, в частности к устройствам манипуляторов системы звуковидения (далее - манипулятор), применяемых для определения и регистрации координат посторонних предметов, находящихся в пространстве между торцами головок сборок активной зоны и нижними отметками устройств, проходящих через поворотные пробки и колонну СУЗ, перед началом перегрузки и, при необходимости, в процессе перегрузки быстрых реакторов с натриевым теплоносителем.
Известны, по меньшей мере, две группы систем ультразвукового (УЗ) контроля в быстрых реакторах с натриевым теплоносителем.
В одной из систем УЗ излучатель и приемник располагаются вне корпуса реактора и сигнал к ним и от них передается по волноводу - трубке, заполненной жидким металлом (см., например, патенты FR 2600201, МПК G21C 17/06 и GB 1488478, МПК G21C 17/00). Техническими проблемами известных систем являются сложность технологического процесса измерений, связанная с наличием дополнительных вспомогательных натриевых и вакуумных систем для поэтапного заполнения волновода жидкометаллическим теплоносителем, пониженная надежность реактора, поскольку натрий первого контура выводится за пределы корпуса реактора, а также невысокая точность определения координат посторонних предметов в связи с удалением преобразователя от места измерения.
Во второй группе УЗ излучатель и приемник располагаются непосредственно в натрии, внутри корпуса реактора, и для доставки УЗ излучателя и приемника в корпус необходимо специальное устройство - манипулятор.
Предлагаемое устройство относится ко второй группе систем УЗ контроля.
Манипулятор системы звуковидения предназначен:
- для доставки в осматриваемую зону реактора ультразвуковых преобразователей (УЗП);
- для наведения ультразвукового луча в заданном направлении, в горизонтальной и вертикальной плоскостях пространства;
- для выведения УЗП из натриевого теплоносителя в зону с пониженной температурой на время работы реактора на мощности.
Известно устройство звуковидения ядерного реактора с жидкометаллическим теплоносителем (см., например, патент РФ №1528235, МПК G21C 17/00).
Устройство содержит штангу, нижний конец которой имеет фланец. Штанга расположена с возможностью продольного перемещения в кольцевом выступе полого корпуса. Фланец, полый корпус с кольцевыми выступами и уплотнения образуют герметичную камеру, заполненную жидким металлом, идентичным теплоносителю реактора. В герметичной камере, в жидком металле, постоянно находится ультразвуковой преобразователь (УЗП) с мембраной, закрепленный на штанге. При использовании устройства в ядерном реакторе нижнюю часть полого корпуса загружают в жидкометаллический теплоноситель. Привод, вращая гайку, перемещает штангу до полного выхода УЗП из полого корпуса. При этом герметичная камера открывается, жидкометаллический теплоноситель из нее смешивается с теплоносителем реактора, образуя однородную среду для ультразвука. По окончании работы, убирая штангу в полый корпус, герметизируют герметичную камеру, оставляя в ней часть жидкометаллического теплоносителя. Избыток его перетекает по каналам кольцевого выступа. Таким образом жидкий металл постоянно контактирует с мембраной УЗП.
Техническими проблемами известного технического решения являются:
- недостаточная точность углового наведения ультразвукового луча, и, как следствие, затруднение определения координат постороннего предмета над активной зоной;
- недостаточная точность высотного положения ультразвукового преобразователя;
- низкая ремонтопригодность, так как при демонтаже манипулятора из реактора, необходимо предусматривать защитные контейнеры и герметизирующие защитные конструкции;
- сложность конструкции, так как жидкометаллический теплоноситель герметизируется в герметичной камере, через подвижные уплотнения;
- невысокая надежность, так как ультразвуковой преобразователь (УЗП) постоянно находится в жидком металле.
Известно устройство звуковидения ядерного реактора с жидкометаллическим теплоносителем, ультразвуковой флюороскоп (заявка Японии № JP S5697816A, МПК G01B 17/00, G21C 17/08), манипулятор которого содержит корпус, имеющий возможность перемещаться вверх и вниз, и держатель с ультразвуковыми излучателями и приемником, снаружи соединенные посредством складывающегося рычажного механизма. Внутренняя полость корпуса герметично соединена с помощью сильфонов с внутренней полостью держателя. Сигнальный кабель от ультразвуковых излучателей и приемника проходит через сильфоны и через ролики направляется в корпус и далее выводится за пределы реактора. Корпус соединен со штоком управления вертикальным перемещением с помощью шариковой винтовой пары и далее с приводным двигателем. Приводной двигатель размещен в блоке привода, а корпус блока привода соединен с подъемником с помощью троса. Имеется также отдельное устройство углового поворота корпуса. Все оборудование размещается в кожухе, на нижнем конце которого установлена заслонка. До работы манипулятора кожух с оборудованием хранится вне реактора. Для осуществления работы кожух устанавливается на малую поворотную пробку реактора. Манипулятор используется, когда температура натрия в реакторе низкая, во время перегрузки или технического обслуживания реактора. После установки манипулятора в его внутренней полости заменяется газ, отрывается заслонка и корпус с рычажным механизмом и держателем вводятся в реактор по прямой линии. Затем включается приводной двигатель, чтобы подтянуть рычаг и согнуть корпус и держатель в L-образную форму. Далее вращающаяся пробка реактора и рычаг объединяются и поворачиваются отдельно установленным приводным устройством, и вся верхняя поверхность активной зоны сканируется путем передачи и приема ультразвуковых волн. Изображение верхней поверхности активной зоны можно проецировать на отдельно установленную электронно-лучевую трубку.
Техническими проблемами этого манипулятора являются:
- не обеспечивается безопасное вращение поворотных пробок, так как манипулятор сканирует пространство именно при вращении поворотных пробок;
- недостаточная точность углового наведения ультразвукового луча, и, как следствие, затруднение определения координат постороннего предмета над активной зоной;
- недостаточная точность высотного положения ультразвукового преобразователя;
- низкая ремонтопригодность, так как при демонтаже манипулятора с реактора, необходимо предусматривать защитные контейнеры и герметизирующие защитные конструкции;
- недостаточная надежность из-за возможности отказа привода складывающегося рычага или герметичного соединения соединительного механизма и корпуса.
Техническим результатом предлагаемого изобретения является повышение точности углового положения ультразвукового луча и высотного положения ультразвукового преобразователя и, следовательно, повышение точности определения координат постороннего предмета над активной зоной реактора, а также снижение трудоемкости и повышение безопасности работ обслуживающего персонала при проведении монтажа (демонтажа) манипуляторного оборудования и при выполнении измерений.
Указанный технический результат достигается тем, что в манипуляторе для перемещения ультразвукового преобразователя в реакторе на быстрых нейтронах с жидкометаллическим теплоносителем, содержащем неподвижный корпус, выполненный преимущественно в виде трубы с внутренней полостью, размещенный в ней ультразвуковой преобразователь с канатным приводом вертикального перемещения, с приводом для углового перемещения корпуса, согласно предлагаемого изобретения устройство, внутри неподвижного корпуса расположена поворотная направляющая труба, в которой постоянно установлена защитная пробка с возможностью сцепления ее при работе с ультразвуковым преобразователем и перемещения совместно с ним, соединение преобразователя с направляющей трубой осуществлено постоянно на всем вертикальном ходе ультразвукового преобразователя, а подключение ультразвукового преобразователя осуществлено с помощью герметичного разъема и ленточно-цепной кабельной направляющей.
Манипулятор может быть снабжен шиберами с приводами для отсечения внутренней полости манипулятора от полости реактора и клапанами для замены среды во внутренней полости манипулятора.
Манипулятор может быть снабжен устройствами для натяжения и постоянного контроля натяжения приводного каната.
Ультразвуковой преобразователь может быть снабжен датчиком контроля его температуры.
Преимущественно защитная пробка в верхнем положении и при ее вертикальном перемещении сцеплена с направляющей трубой и является направляющей для ультразвукового преобразователя.
Преимущественно ультразвуковой преобразователь имеет устройство поворота относительно приводного троса и ленточно-кабельной направляющей.
Преимущественно кабель УЗП и кабель от датчика контроля его температуры расположены в глухой трубе, верхний торец которой находится выше уровня теплоносителя в реакторе при нахождении УЗП в нижнем крайнем положении, что исключает контакт жидкого теплоносителя с кабелями питания и управления.
Угол поворота направляющей трубы может быть ограничен в заданных пределах.
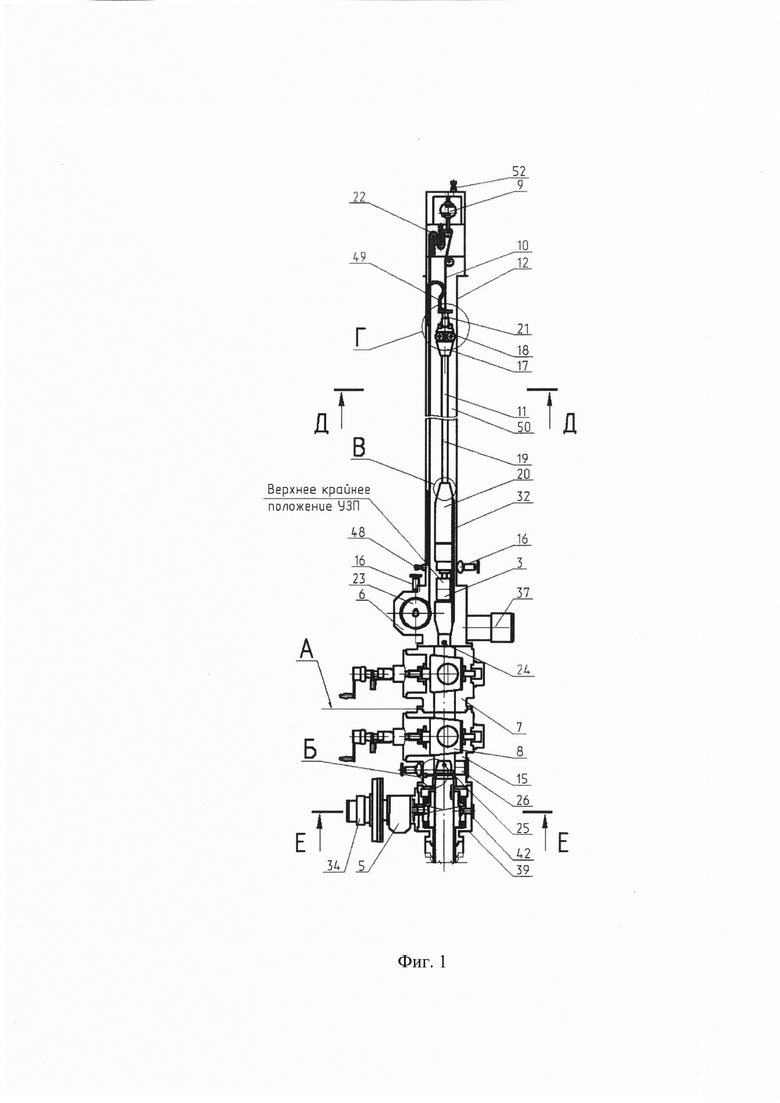
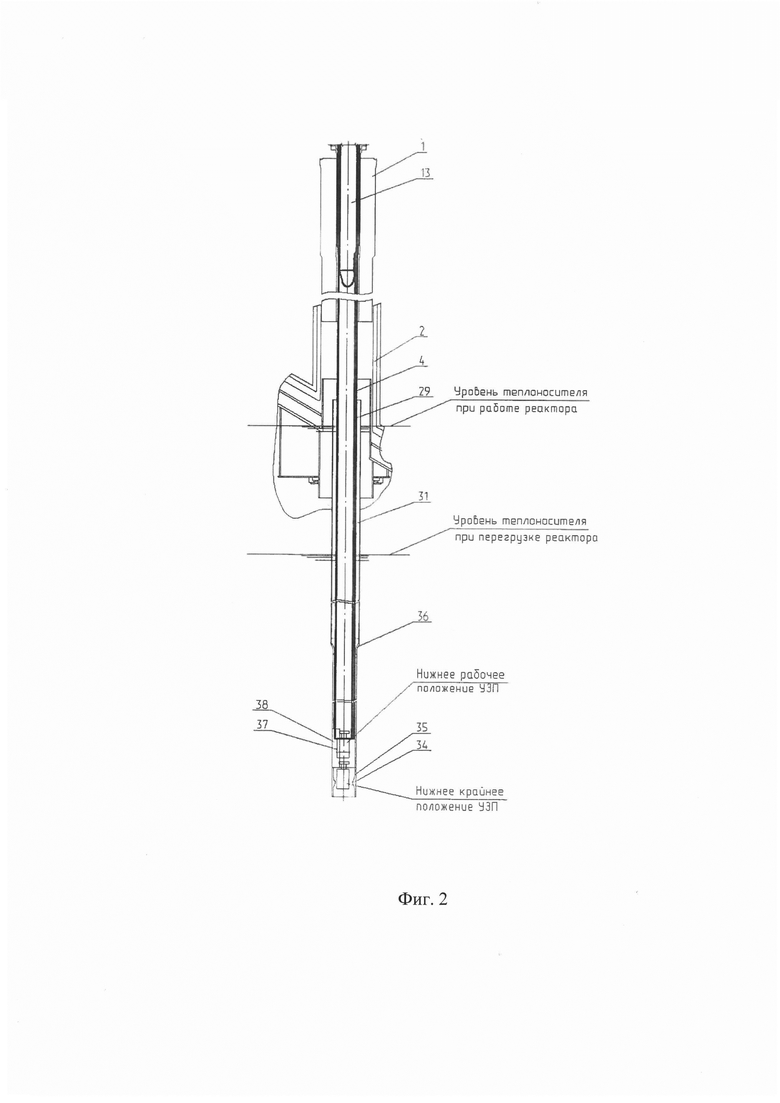
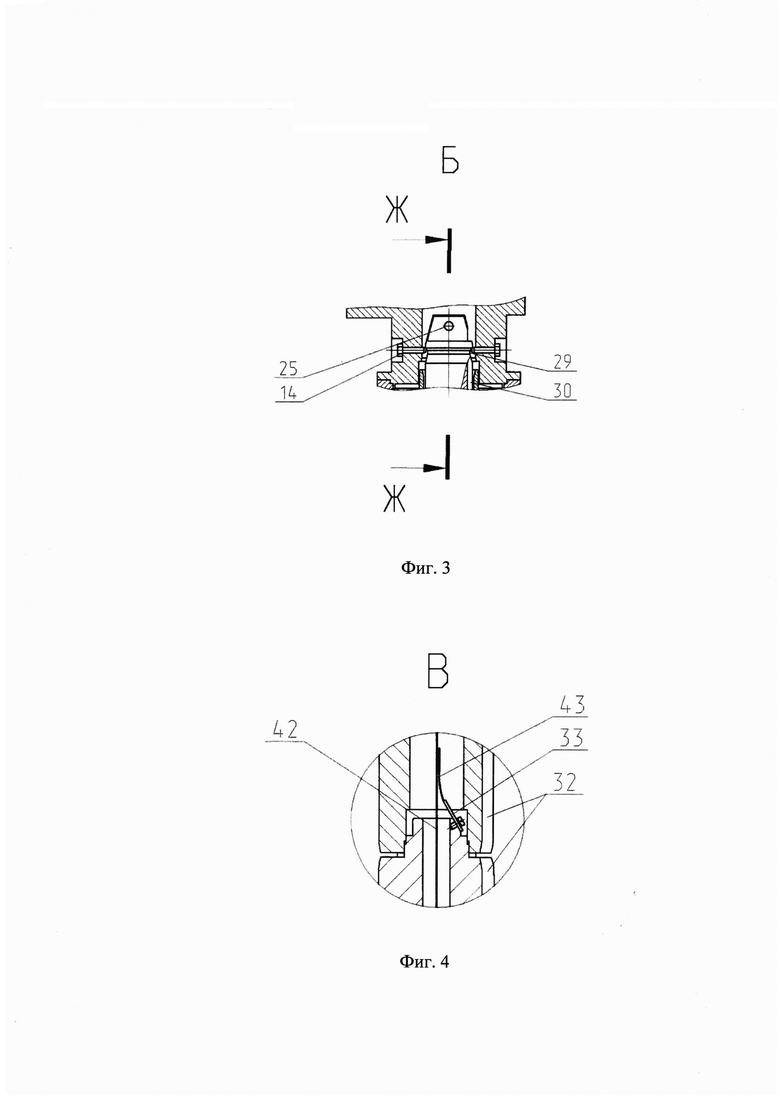
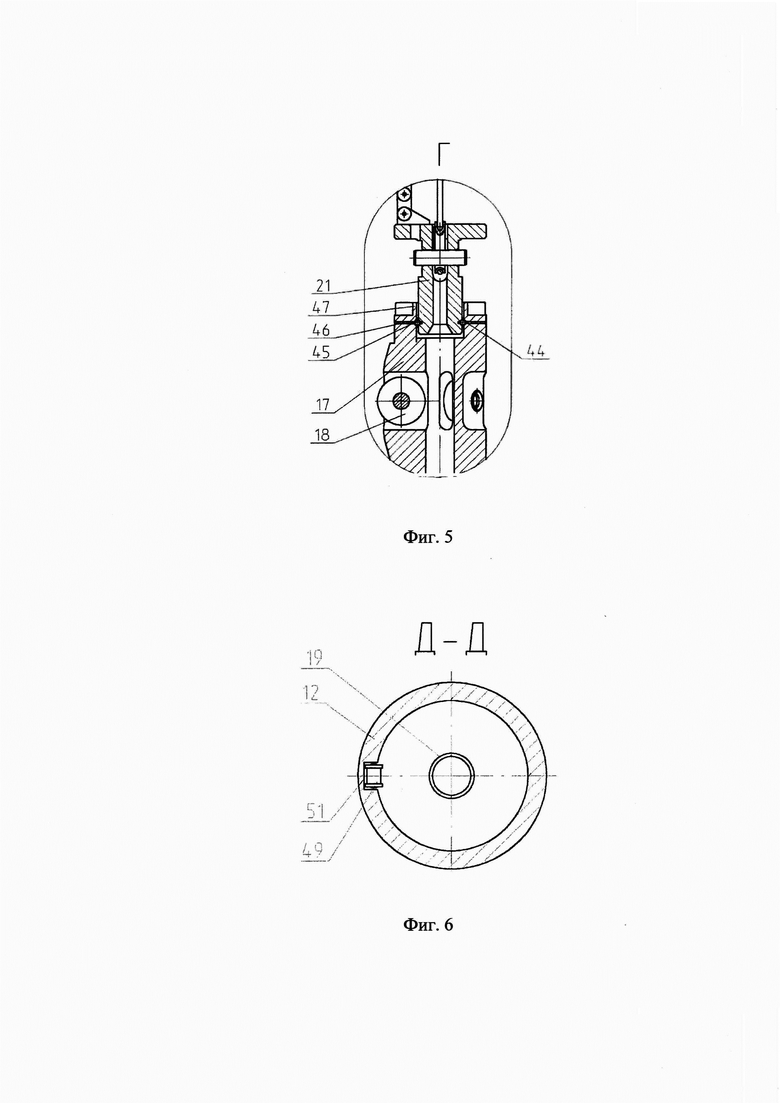
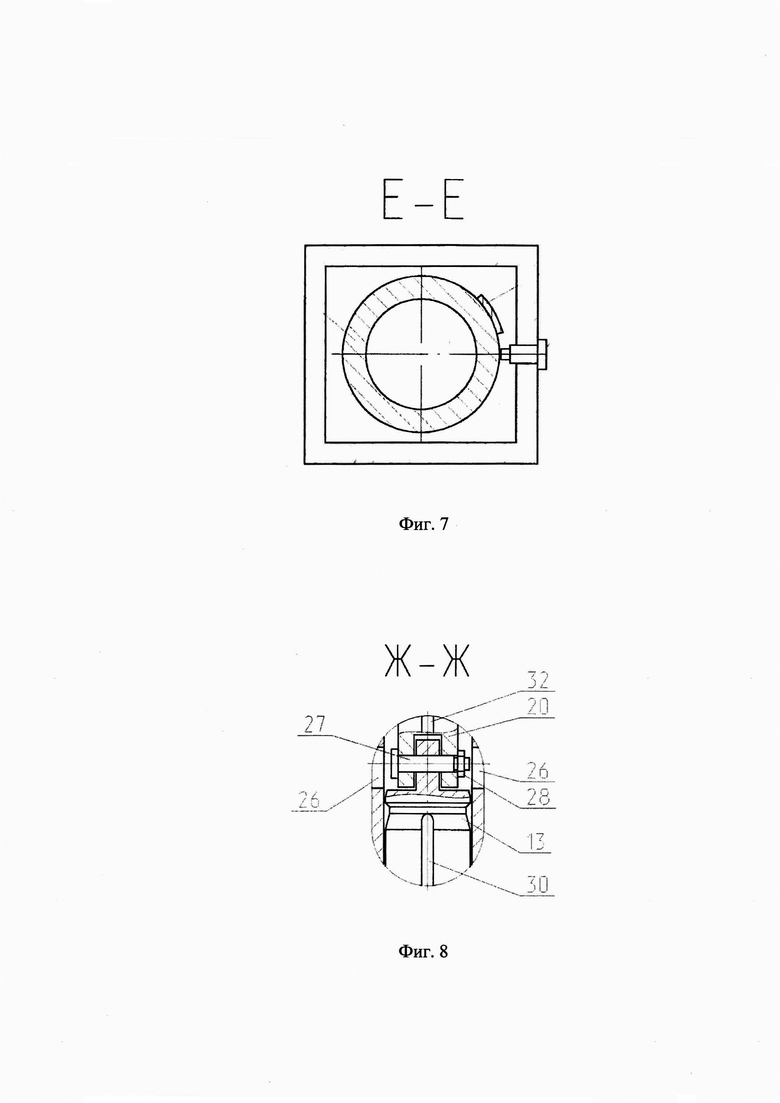
Сущность заявленного изобретения поясняется чертежами, на которых изображены: на фиг. 1 - продольный разрез предлагаемого манипулятора, на фиг. 2 - расположение УЗП в реакторе, на фиг. 3 - элемент Б (увеличенное изображение), на фиг. 4 - элемент В (увеличенное изображение), на фиг. 5 - элемент Г (увеличенное изображение), на фиг. 6 - сечение Д - Д, на фиг. 7 - сечение Е - Е, на фиг. 8 - сечение Ж - Ж.
Два манипулятора устанавливаются в пробке 1 под механизмы горизонтального звуковидения в патрубке 2 корпуса реактора БН-800 за пределами поворотных пробок.
Каждый манипулятор содержит следующие основные узлы: ультразвуковой преобразователь (УЗП) 3, направляющую трубу 4, привод 5 поворота направляющей трубы 4, привод 6 вертикального перемещения УЗП 3, шибер 7 верхний, шибер 8 нижний, устройство 9 контроля натяжения каната 10, штангу 11, герметичный корпус 12, защитную пробку 13.
В процессе работы реактора на мощности, верхняя часть манипулятора, ограниченная герметичным корпусом 12, приводом 6 и шибером 7, расположенная выше плоскости разъема А между верхним шибером 7 и нижним шибером 8, находится на стенде центрального зала, где выполняются все необходимые предмонтажные проверки и, при необходимости, наладки.
До работы манипулятора непосредственно в реакторе на нижний шибер 8 установлена герметизирующая заглушка из комплекта инструмента и принадлежностей (на чертежах не показана). В направляющей трубе 4 постоянно установлена защитная пробка 13. Фиксация защитной пробки 13 в направляющей трубе 4 осуществляется винтами 14, находящимися в нижней части корпуса 15 нижнего шибера 8. Нижний шибер 8 находится в закрытом положении.
Перед проведением работ по перегрузке реактора, верхняя часть манипулятора демонтируется со стенда центрального зала и устанавливается на нижний шибер 8. Верхний шибер 7 открывается. Через клапаны 16 происходит замена газовой среды во внутренней полости верхней части манипулятора с воздуха на аргон. Открывается нижний шибер 8.
Вертикальное перемещение в герметичном корпусе 12 и направляющей трубе 4 штанги 11, состоящей из верхнего корпуса 17 с роликами 18, трубы 19, нижнего корпуса 20 с ультразвуковым преобразователем 3 производится с помощью каната 10, который соединен с поворотным устройством 21, расположенным в верхней части верхнего корпуса 17. Другим концом канат 10 через блок натяжных роликов 22 и устройство 9 контроля натяжения каната 10 соединен с барабаном 23 привода 6 вертикального перемещения УЗП 3.
УЗП 3 опускается до стыковки проушины 24 в нижней части нижнего корпуса 20 с отверстием 25 в верхней части защитной пробки 13. Через монтажные отверстия 26 в корпусе 15 нижнего шибера 8 осуществляется соединение нижнего корпуса 20 УЗП 3 с защитной пробкой 13 с помощью пальца 27 и гайки 28. Из корпуса 15 вывинчиваются винты 14 до выхода из канавки 29 защитной пробки 13. Дальнейшее опускание УЗП 3 происходит совместно с защитной пробкой 13.
При опускании УЗП 3 после зацепления с защитной пробкой 13 происходит сначала взаимодействие паза 30 в защитной пробке 13 и направляющих планок 31, установленных на внутренней поверхности направляющей трубы 4. При дальнейшем опускании, паз 30 в защитной пробке 13 выходит из зацепления с направляющими планками 31. В зацепление с направляющими планками 31 входит паз 32 в нижнем корпусе 20 УЗП 3 и сохраняется ориентация УЗП 3 по углу, так как паз 32 выполнен в одной плоскости с пазом 30 в защитной пробке 13. Направляющие планки 29 выполнены из стали, подвергнутой специальной термообработке, обеспечивающей твердость накладок более 57HRC, что гарантирует плавное скольжение по ним защитной пробки 13 и корпуса 20 УЗП 3, как в газовой среде, так и в среде теплоносителя, что подтверждено опытом эксплуатации реакторов БН-350, БН-600 и БН-800.
Опускание УЗП 3 происходит ступенчато, с его нагревом до температуры натрия в реакторе (250°С). Скорость нагрева от 1 до 1,3°С/мин контролируется с помощью датчика 33 контроля температуры (термосопротивления), установленного в корпусе 20 УЗП 3. Такой режим опускания необходим для сохранения работоспособности УЗП 3 в течение длительного времени.
После нагрева УЗП 3 до заданной температуры (250°С) опускание производится с постоянной скоростью. При подходе к нижнему положению, по сигналу, формируемому системой управления, начинается торможение. Опускание осуществляется до упора корпуса 20 УЗП 3 в наплавку 34 на кессоне 35 трубы 36 реактора. По сигналу с датчика 9 натяжения каната 10, электродвигатель 37 привода 6 вертикального перемещения УЗП 3 отключается. Далее нижний корпус 20 УЗП 3 поднимают ручным приводом на число оборотов, которое определяется при проведении пуско-наладочных работ. При этом рабочая поверхность 37 УЗП 3 расположена напротив окна 38 в трубе 36 реактора.
Угловое перемещение ультразвукового преобразователя 3 осуществляется при его нахождении в нижнем рабочем положении с помощью направляющей трубы 4. Направляющие планки 31 на трубе 4 обеспечивают вращение УЗП 3 совместно с трубой 4, причем за счет беззазорного соединения направляющих планок 31 с пазом 32 корпусом 20 угол поворота корпуса 20 УЗП 3 равен углу поворота направляющей трубы 4. Заданный угол поворота направляющей трубы 4 обеспечивается приводом 5 с точностью, достаточной для определения координаты постороннего предмета. Вращение осуществляется с постоянной скоростью. При повороте УЗП 3 происходит сканирование пространства над головками сборок активной зоны.
Для повышения надежности работы может быть выполнено ограничение угла поворота направляющей трубы 4. Для этого в корпусе 39 привода 5 поворота установлен упор 40, а на направляющей трубе 4 - сектор 41, размеры которого определяют максимальный угол поворота трубы 4.
Для исключения контакта кабеля 42 от УЗП 3 и кабеля 43 от датчика 33 контроля температуры ультразвукового преобразователя (термосопротивления) с натрием, они расположены в глухой трубе 19, верхний торец которой находится выше уровня теплоносителя в реакторе при нахождении УЗП 3 в нижнем крайнем положении.
Для исключения закручивания каната 10 при вращении УЗП 3 его крепление к трубе 19 осуществляется через поворотное устройство 21, которое посредством набора шариков 44 через кольцевую коническую проточку 45 соединяется с верхним корпусом 17 через регулирующую прокладку 46 и фланец 47. Такая конструкция гарантированно обеспечивает возможность разворота поворотного устройства 21 относительно корпуса 17, а роликовые опоры 18 качения исключают раскачивания при вертикальном перемещении штанги 11.
Соединение кабелей 42 и 43 с внешним герметичным разъемом 48 осуществляется с помощью гибкой ленточно-цепной кабельной направляющей 49, которая также соединена с верхним корпусом 17 через поворотное устройство 21 и обеспечивает герметичность внутренней полости 50 герметичного корпуса 12 манипулятора. Для исключения непроектного перемещения ленточно-цепной кабельной направляющей 49 в герметичном корпусе 12 выполнен направляющий канал 51. Провода от устройства 9 контроля усилия (входящие в состав устройства) соединены с системой управления через внешний герметичный разъем 52.
После завершения сканирования пространства над головками сборок активной зоны, УЗП 3 поднимается в промежуточное положение, когда соединение корпуса 20 УЗП 3 и пробки 13 находится против окна 26 в корпусе 15. Пробка 13 фиксируется в корпусе 15 нижнего шибера 8 винтами 14. После чего, корпус 20 УЗП 3 отсоединяется от защитной пробки 13 и поднимается в крайнее верхнее положение. Верхний и нижний шиберы 7 и 8 закрываются. Закрытие верхнего шибера 7 обусловлено исключением попадания радиоактивных окислов натрия в центральный зал при транспортировании верхней части манипулятора на шахту мойки.
Верхняя часть манипулятора, выше плоскости разъема А, продувается чистым аргоном, заполняется воздухом, демонтируется и устанавливается на шахту мойки длинномерного оборудования для отмывки. На плоскость разъема А нижнего шибера 8 устанавливается заглушка из комплекта инструмента и принадлежностей (на чертежах не показана). После отмывки верхняя часть манипулятора переносится на стенд, где осуществляется, ревизия и, при необходимости, замена ультразвукового УЗП на новый из состава комплекта запасных частей и, при необходимости, ремонт.
Предлагаемый манипулятор обеспечивает повышение точности углового положения ультразвукового луча и высотного положения ультразвукового преобразователя. Следствием этого является улучшение определения координат постороннего предмета над активной зоной реактора.
Кроме того, его достоинствами являются повышенная надежность, безопасность и ремонтопригодность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ НАДЗОННОГО ПРОСТРАНСТВА ЯДЕРНОГО РЕАКТОРА | 2018 |
|
RU2697664C1 |
| КАНАЛ НАПРАВЛЯЮЩИЙ | 2014 |
|
RU2580522C1 |
| СПОСОБ ПЕРЕГРУЗКИ БЫСТРОГО ЯДЕРНОГО РЕАКТОРА И СИСТЕМА ПЕРЕГРУЗКИ | 2002 |
|
RU2224307C2 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ПРОБКИ И БЛОКА ВЫЕМНОГО ПРИ ПЕРЕГРУЗКЕ ЯДЕРНОГО РЕАКТОРА | 2014 |
|
RU2558379C1 |
| УСТРОЙСТВО ЗВУКОВИДЕНИЯ ЯДЕРНОГО РЕАКТОРА С ЖИДКОМЕТАЛЛИЧЕСКИМ ТЕПЛОНОСИТЕЛЕМ | 1987 |
|
SU1528235A1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО С ПЕРЕХОДНЫМ БЛОКОМ ДЛЯ УСТАНОВКИ И ИЗВЛЕЧЕНИЯ ИЗ ЯДЕРНОГО РЕАКТОРА ЭЛЕМЕНТОВ АКТИВНОЙ ЗОНЫ | 2014 |
|
RU2569336C1 |
| УСТРОЙСТВО ПЕРЕГРУЗКИ | 2014 |
|
RU2580925C1 |
| ВИНТОВОЙ ПОДЪЕМНИК | 2010 |
|
RU2459763C1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ УСТАНОВКИ И ИЗВЛЕЧЕНИЯ ИЗ РЕАКТОРА ДЛИННОМЕРНОГО ОБОРУДОВАНИЯ | 2014 |
|
RU2569334C1 |
| ЯДЕРНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА И УСТРОЙСТВО ДЛЯ ВВОДА ЗАЩИТНОГО ГАЗА В УСТАНОВКУ | 2014 |
|
RU2566661C1 |
Изобретение относится к манипулятору для перемещения ультразвукового преобразователя в реакторе на быстрых нейтронах с жидкометаллическим теплоносителем. Устройство содержит неподвижный корпус с приводом для углового перемещения, выполненный преимущественно в виде трубы с внутренней полостью, где размещен ультразвуковой преобразователь с канатным приводом вертикального перемещения. Внутри неподвижного корпуса расположена поворотная направляющая труба, в которой постоянно установлена защитная пробка с возможностью сцепления ее при работе с ультразвуковым преобразователем и перемещения совместно с ним, соединение преобразователя с направляющей трубой осуществлено постоянно на всем вертикальном ходе ультразвукового преобразователя, а подключение ультразвукового преобразователя осуществлено с помощью герметичного разъема и ленточно-цепной кабельной направляющей. Техническим результатом является повышение точности углового положения ультразвукового луча и высотного положения ультразвукового преобразователя, повышение точности определения координат постороннего предмета над активной зоной реактора, а также снижение трудоемкости и повышение безопасности работы обслуживающего персонала при проведении монтажа (демонтажа) манипуляторного оборудования и при выполнении измерений. 7 з.п. ф-лы, 8 ил.
1. Манипулятор для перемещения ультразвукового преобразователя в реакторе на быстрых нейтронах с жидкометаллическим теплоносителем, содержащий неподвижный корпус, выполненный в виде трубы с внутренней полостью, размещенный в нем ультразвуковой преобразователь с канатным приводом вертикального перемещения и устройство с приводом для углового перемещения корпуса, отличающийся тем, что внутри неподвижного корпуса расположена поворотная направляющая труба, в которой постоянно установлена защитная пробка с возможностью сцепления ее при работе с ультразвуковым преобразователем и перемещения совместно с ним, соединение ультразвукового преобразователя с направляющей трубой осуществлено постоянно на всем вертикальном ходе ультразвукового преобразователя, а подключение ультразвукового преобразователя осуществлено с помощью герметичного разъема и ленточно-цепной кабельной направляющей.
2. Манипулятор по п. 1, отличающийся тем, что для отсечения внутренней полости манипулятора от полости реактора он снабжен шиберами с приводами, а для замены среды во внутренней полости манипулятора он снабжен клапанами.
3. Манипулятор по п. 1 или 2, отличающийся тем, что он снабжен устройствами для натяжения и постоянного контроля натяжения приводного каната.
4. Манипулятор по любому из пп. 1-3, отличающийся тем, что ультразвуковой преобразователь снабжен датчиком контроля его температуры.
5. Манипулятор по любому из пп. 1-4, отличающийся тем, что защитная пробка в верхнем положении и при ее вертикальном перемещении сцеплена с направляющей трубой и является направляющей для ультразвукового преобразователя.
6. Манипулятор по любому из пп. 1-5, отличающийся тем, что ультразвуковой преобразователь имеет устройство поворота относительно приводного троса и ленточно-кабельной направляющей.
7. Манипулятор по любому из пп. 1-6, отличающийся тем, что кабель ультразвукового преобразователя и кабель датчика контроля температуры ультразвукового преобразователя расположены в глухой трубе, верхний торец которой находится выше уровня теплоносителя в реакторе при нахождении ультразвукового преобразователя в нижнем крайнем положении, что исключает контакт жидкого теплоносителя с кабелями питания и управления.
8. Манипулятор по любому из пп. 1-7, отличающийся тем, что угол поворота направляющей трубы ограничен в заданных пределах.
| JP S5697816A, 06.08.1981 | |||
| УСТРОЙСТВО ЗВУКОВИДЕНИЯ ЯДЕРНОГО РЕАКТОРА С ЖИДКОМЕТАЛЛИЧЕСКИМ ТЕПЛОНОСИТЕЛЕМ | 1987 |
|
SU1528235A1 |
| УЗЕЛ СЖИМАЕМОЙ КАССЕТЫ СО СКОБАМИ | 2012 |
|
RU2600201C2 |
| GB 1488478 A, 12.10.1977 | |||
| ПРЕОБРАЗОВАТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ПРИЕМА/ПЕРЕДАЧИ УЛЬТРАЗВУКОВЫХ КОЛЕБАНИЙ В СРЕДЕ ЖИДКОГО НАТРИЯ, ПРИЕМНАЯ/ПЕРЕДАЮЩАЯ РЕШЕТКА, АНТЕННА, СПОСОБ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ И УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ В ОПТИЧЕСКИ НЕПРОЗРАЧНОЙ СРЕДЕ | 1997 |
|
RU2186408C2 |
| Способ получения губчатого железа | 1961 |
|
SU142318A1 |
| FR 2930642 B1, 11.06.2010 | |||
| Устройство для психологических исследований | 1989 |
|
SU1621879A1 |
| FR 2907901 B1, 24.04.2009 | |||
| RU 139831 U1, 27.04.2014 | |||
| Система контроля корпуса реактора. | 2020 |
|
RU2739575C1 |

