Изобретение относится к способам промыслово-геофизических исследований в нефтяных и газовых скважинах, в частности, к способам регистрации акустического шума в скважине.
Способы акустической шумометрии хорошо известны и применяются для определения местоположения и характеристик притока жидкости и газа в ствол скважины, мест утечек, выявления интервалов заколонных перетоков и т.д.
Для сокращения времени и повышения разрешающей способности скважинной акустической шумометрии существует потребность в скважинном приборе и методе обработки, которые в процессе движения в стволе скважины дают возможность непрерывного процесса обнаружения местоположения источников полезного шума (полезного по сравнению с помехами от дорожного шума).
В настоящее время известны устройства для скважинной акустической шумометрии, в которых используются несколько датчиков. Два и более акустических датчиков нужны для повышения информативности данных шумометрии и для применения дифференциальных, корреляционных и т.п. способов распознавания полезного шума на фоне дорожного шума.
В патенте US №4114721 описана система, в которой по стволу скважины движется пара акустических детекторов, разнесенных по оси. Сигналы акустических детекторов взаимно коррелированы наверху скважины. Временной сдвиг взаимной корреляции между такими сигналами представляет собой разницу во времени между временем распространения акустического шума от источника шума до детекторов. Путем сравнения такого временного сдвига с интервалом времени прохождения звука в стволе скважины между детекторами, каждый источник шума идентифицируется как расположенный между детекторами (над детекторами и ниже детекторов). Для такой схемы необходим достаточно сильный уровень полезного шума на фоне дорожного шума, иначе не будет возможности уверенно распознать упомянутый временной сдвиг.
В патенте US №4353122 описаны устройство и способ дифференциального шумового каротажа, который обеспечивает непрерывный каротаж для определения того, есть ли приток из перфорационных отверстий в обсаженной нефтяной скважине. Прибор для дифференциального каротажа шума содержит систему с несколькими акустическими преобразователями, имеющую, по меньшей мере, два преобразователя, расположенных на зонде или оправке инструмента. Преобразователи расположены на заданном расстоянии друг от друга на зонде, так что один преобразователь обнаружит источник шума за заданное время до второго преобразователя при постоянной скорости движения вдоль скважины. Шумовые сигналы от преобразователей поступают на дифференциальный усилитель, где генерируется разница между двумя среднеквадратичными сигналами, передаваемая с помощью системы скважинной телеметрии на поверхность. Как и предыдущем патенте для такой схемы необходим достаточно высокий уровень полезного шума на фоне дорожного шума, иначе небольшая разница между двумя среднеквадратичными сигналами не позволит его уверенно распознать.
В патентах US №9982527 и US №10655457 описаны устройства и способы анализа распространения и пространственного местоположения с помощью матрицы (массива) акустических датчиков для скважинных приложений, которые относятся к области обнаружения дефектов, в том числе с утечкой, в стволе скважины с использованием неразрушающих средств. Рассматриваемая схема матрицы гидрофонов включает использование дифференциальных датчиков в радиальном направлении и может использоваться для удаления дорожного шума из акустического шума, создаваемого дефектом или утечкой. Дорожный шум может создавать сигнальную волну, которая может распространяться через ствол скважины. Поверхности датчика могут отображать сигнальную волну в системе координат х и у поперечного сечения ствола скважины. Одна поверхность датчика может записывать сигнальную волну в положительном направлении х и/или у, а противоположная поверхность датчика может записывать сигнальную волну в отрицательном направлении х и/или у. Таким образом, поскольку характеристики сигнальной волны могут быть почти неизменны в поперечном сечении ствола скважины, сравнение записанной сигнальной волны от двух противоположных поверхностей датчика может погасить сигнальную волну, удалив дорожный шум посредством гасящей интерференции. С другой стороны, сигнальная волна от дефекта может быть невосприимчивой к такой гасящей интерференции, потому что нельзя ожидать идентичных дефектов, создающих сигнальные волны с почти одинаковыми характеристиками сигнала. Распознавание отверстия с утечкой, которое само по себе является источником шума, осуществляется аналогичным способом. Специфика используемой радиальной схемы дифференциальных датчиков и способа обработки данных накладывают ограничения на тип распознаваемого источника полезного сигнала: утечка из отверстия. Кроме того, матрица акустических датчиков состоит из примерно 30 датчиков и имеет 14 передающих каналов с азимутальной и дифференциальной коммутацией, что понижает чувствительность (ввиду малых размеров датчиков) и надежность прибора, усложняет интерпретацию регистрируемого массива данных и требует точной калибровки всех датчиков в матрице.
Технический результат, достигаемый при реализации изобретения, заключается в повышении разрешающей способности и сокращении времени проведения скважинной акустической шумометрии посредством обеспечения в процессе движения акустических датчиков возможности выделения полезного шума на фоне дорожного шума и непрерывного обнаружения источников полезного шума в стволе скважины.
Указанный технический результат достигается тем, что в соответствии с предлагаемым способом скважинной акустической шумометрии вдоль ствола скважины перемещают шумомер, содержащий детектор бегущих волн, обеспечивающий возможнесть одновременного измерения в по меньшей мере трех точках вдоль оси шумомера суммарного акустического шума, представляющего собой сумму акустических сигналов, приходящих от источников полезного шума, когда детектор бегущих волн находится в непосредственной близости от источников полезного шума в стволе скважины, и акустических сигналов от бегущих волн, приходящих от источников шума, удаленных от детектора по стволу скважины на расстояние, на котором генерируемый удаленными источниками шум в месте расположения детектора бегущих волн представляет собой бегущие волны. В процессе перемещения шумомера осуществляют измерения суммарного акустического шума и осуществляют обработку измеренного акустического шума, заключающуюся в выделении акустических сигналов от источников полезного шума путем подавления бегущих волн, чем обеспечивается обнаружение местоположения источников полезного шума.
В соответствии с одним из вариантов осуществления изобретения детектор бегущих волн содержит три акустических датчика, расположенных последовательно вдоль оси шумомера на одинаковом расстоянии друг от друга, составляющем четверть длины волны бегущей волны, имеющей самую короткую длину волны из всех бегущих волн, подлежащих подавлению. В процессе обработки измеренного акустического шума определяют значение второй разности акустического шума путем вычитания удвоенного акустического шума, измеренного средним из трех датчиков, из суммы акустических шумов, измеренных двумя другими датчиками, а подавление бегущих волн осуществляют путем применения одномерных волновых операторов Даламбера в частотной или временной областях со скоростями волн, соответствующих подавляемым бегущим волнам, к измеренному тремя датчиками акустическому шуму с использованием полученного значения второй разности акустического шума.
В соответствии с одним из вариантов осуществления изобретения обработку измеренного детектором бегущих волн суммарного акустического шума осуществляют в вычислительном блоке на поверхности в режиме реального времени непосредственно при проведении измерений.
В соответствии с еще одним вариантом изобретения шумомер дополнительно снабжен блоком памяти, в который записывают суммарный акустический шум, измеряемый детектором бегущих волн, и после извлечения шумомера на поверхность осуществляют дополнительный анализ измеренного акустического шума.
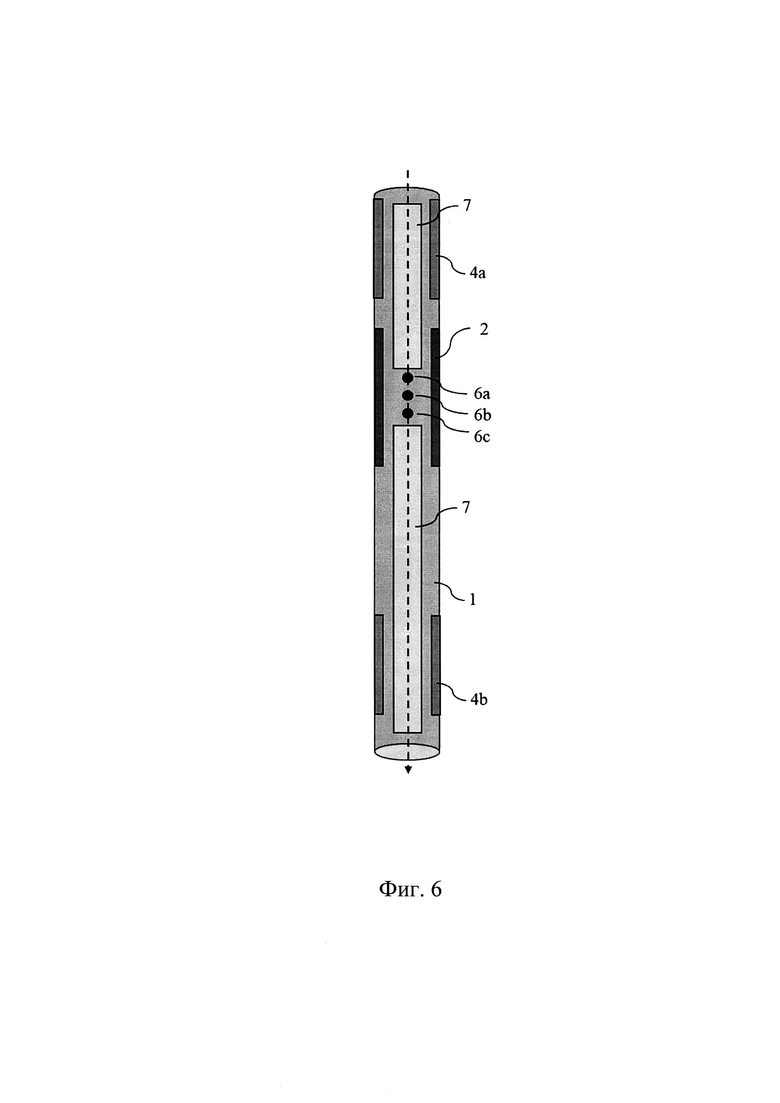
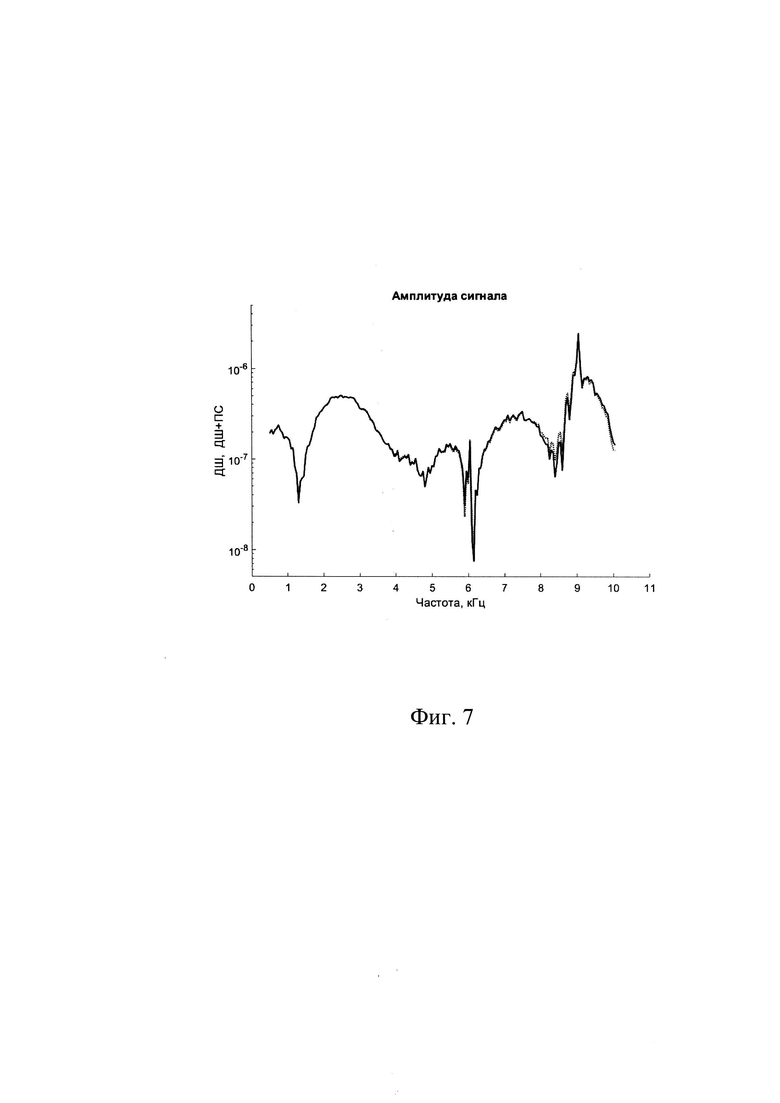
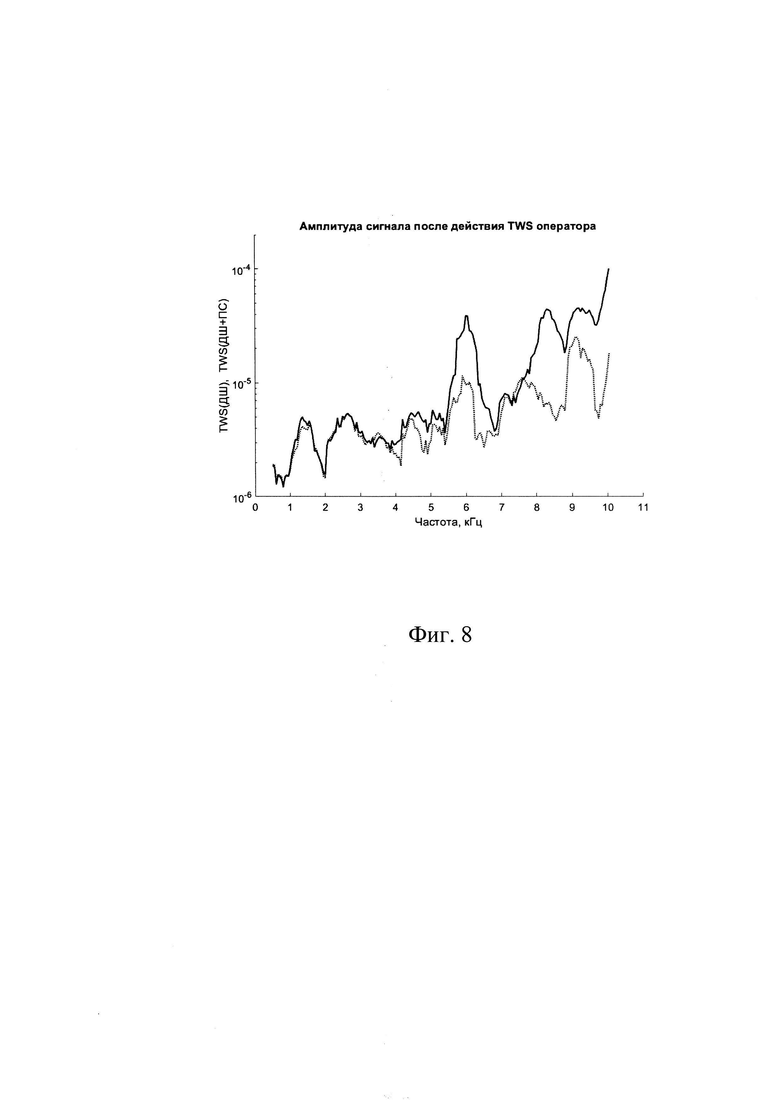
Изобретение поясняется чертежами, где на Фиг. 1 схематически изображена скважина с источником полезного шума и последовательными положениями детектора бегущих волн при перемещении шумомера в непосредственной близости от этого источника полезного шума; на Фиг. 2 приведен пример спектрограммы полезного шума на оси скважины, полученной в результате численного моделирования притока из пласта в отсутствии приборов каротажа; на Фиг. 3 изображена схема фрагмента сборки приборов с детектором бегущих волн и местоположением одного из источников дорожного шума; на Фиг. 4 приведен пример спектрограммы дорожного шума на оси скважины, полученной в результате численного моделирования в отсутствии прибора каротажа; на Фиг. 5 приведен пример схемы конструкции детектора бегущих волн с тремя датчиками для одновременного измерения акустического шума; на Фиг. 6 изображена схема сборки шумомера с источниками дорожного шума (два центратора) и детектором бегущих волн в открытом стволе скважины с флюидом в момент прохождения рядом с источником полезного шума; на Фиг. 7 представлены графики спектра дорожного шума и суммарного шума, полученного сложением с полезным шумом; на Фиг. 8 приведены графики результата действия оператора подавления бегущих волн на дорожный шум и на суммарный шум.
В основе изобретения лежит физическое явление естественной трансформации акустического сигнала от любого источника (в том числе от источника дорожного шума), достаточно удаленного от шумомера по стволу скважины, представляющей собой волновод, в одномерные бегущие волны, что создает возможность избавляться от шумов удаленных источников путем регистрации шумомером бегущих волн и их подавления при обработке.
Дорожным Шумом (ДШ) в данном изобретении является та часть суммарного шума, регистрируемого акустическими датчиками, которая генерируется трактором, геофизической лебедкой, центраторами и т.п.при движении сборки приборов по стволу скважины, и распространяется по волноводной системе, состоящей из элементов конструкции скважины в породе, флюидов, заполняющих скважину, и сборки приборов.
Полезным Шумом (ПШ) является, например, акустический шум от утечки флюида в стволе скважины, притока или перетока флюида, течения флюидов в породе коллектора, трещинах, в межколонном пространстве скважины и т.п., регистрируемый акустическими датчиками с целью определения местоположения его источников и характеристик.
Выделение ПШ из смеси с ДШ в соответствии с настоящим изобретением происходит путем подавления ДШ в сигнале, регистрируемом детектором бегущих волн.
Подавление ДШ основано на специфике распространения акустических волн в волноводной системе, которую представляет собой скважина с каротажным прибором, содержащим шумомер. В соответствии с этой спецификой акустические волны, возникающие при движении прибора или генерируемые на устье скважины различными источниками, трансформируются естественным образом в набор бегущих волн по волноводу по мере удаления от источников ДШ (трактор, геофизическая лебедка, центраторы и т.п.). Детектор бегущих волн в шумомере должен располагаться на удалении по стволу скважины от источников ДШ, достаточном, чтобы в сигнале приходящего к нему ДТП преобладали бегущие волны, например, на удалении нескольких десятков сантиметров.
Бегущие волны являются решениями одномерного волнового уравнения Даламбера (см., например, Исакович М.А., Общая акустика, М., 1973, стр. 50, 51). Поэтому подавление набора бегущих волн осуществляют, например, с помощью набора одномерных волновых операторов Даламбера со скоростями распространения волны, соответствующими скоростям рассматриваемых бегущих волн.
Примером способа подавления бегущих волн ДШ может быть применение конечно-разностных одномерных волновых операторов Даламбера в частотной области к сигналам, регистрируемым указанным детектором бегущих волн.
Полезный шум, производимый, например, таким источником как приток флюида в скважину, смешивается с дорожным шумом, образуя суммарный шум, измеряемый указанным детектором бегущих волн в ходе его непрерывного движения вдоль ствола скважины. Сложное трехмерное акустическое поле, регистрируемое при прохождении детектора рядом с источником ПШ, может сильно отличаться от поля бегущих волн, приходящих в детектор от источников ДШ. Поэтому применение способа подавления набора бегущих волн от источников ДШ к суммарному шуму рядом с местом источника ПШ, может лишь исказить ПШ, но никоим образом не подавить его. В частности, частотные характеристики сигнала после применения способа подавления набора бегущих волн будут существенно различными вблизи источника ПШ и вдали, где присутствует только ДТП.
Выделение полезного шума из суммарного шума состоит в применении способа подавления бегущих волн ДШ к сигналам, зарегистрированным детектором бегущих волн.
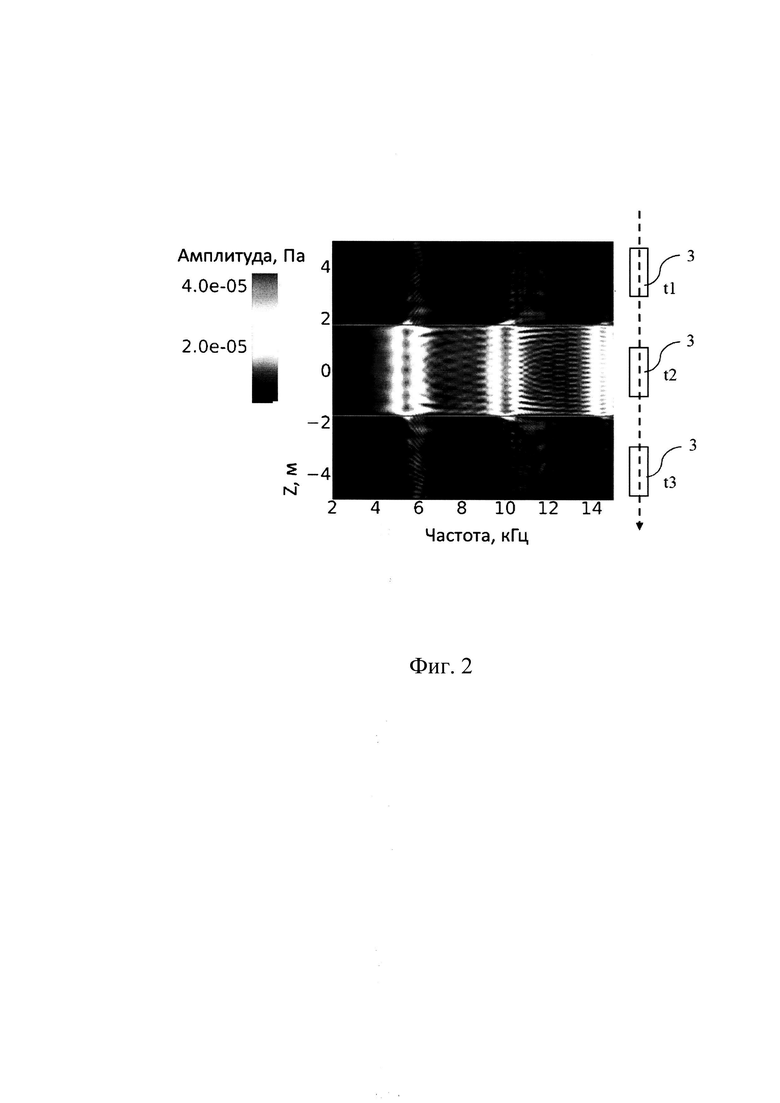
На Фиг. 1 изображена скважина 1 с источником полезного шума 2, мимо которого при движении вдоль ствола по оси скважины 1 в моменты времени t1, t2, t3 последовательно проходит детектор бегущих волн 3 (ДБВ).
В качестве примера пусть ПШ исходит из кольцевого источника, расположенного на периферии скважины и имитирующего приток из пласта, мимо которого движется детектор 3 бегущих волн. На Фиг. 2 приведен пример спектрограммы ПШ вдоль оси скважины, полученной в результате численного моделирования притока из пласта (Н.В. Мутовкин, Д.Н. Михайлов, И.Л. Софронов, Моделирование акустических полей, генерируемых фильтрационным потоком в околоскважинной зоне. Математическое моделирование 31 (6), стр. 95-106) в отсутствии прибора каротажа, и приведена иллюстрация прохождения ДБВ 3 мимо этого источника ПШ (интервал от -2 м до 2 м между двумя серыми линиями) в последовательные моменты времени t1, t2, t3. Видно, что ДБВ 3 будет регистрировать звуковое поле сложной трехмерной структуры около источника ПШ, фиксируя сначала небольшую амплитуду полезного сигнала в момент времени t1, максимальную амплитуду вблизи источника ПШ (t2) и затем опять небольшую амплитуду в момент времени t3.
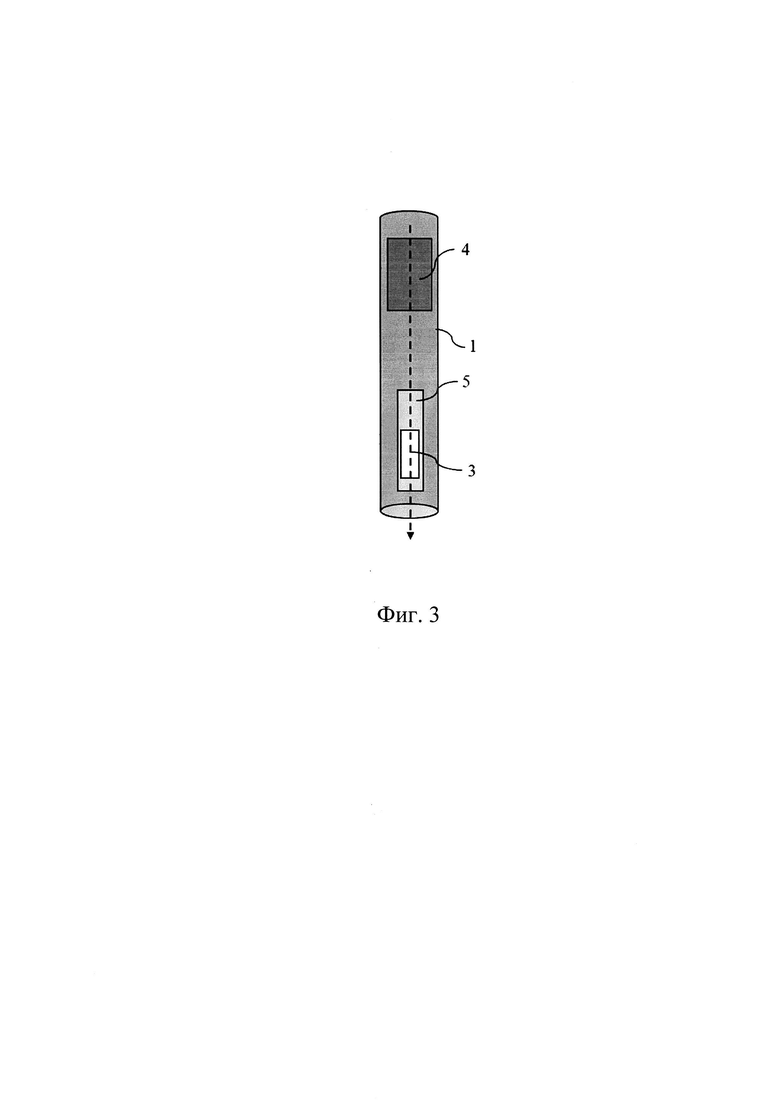
Обычно в сборке приборов каротажа интенсивный ДШ при движении создают центраторы. На Фиг. 3 изображена схема сборки приборов с шумомером 5, в котором находится ДБВ 3, и местоположением одного из источников 4 ДШ, которым является, например, центратор. В изобретении требуется, чтобы источник 4 ДШ был расположен на некотором расстоянии от ДБВ 3 в сборке приборов, не менее нескольких десятков сантиметров по стволу.
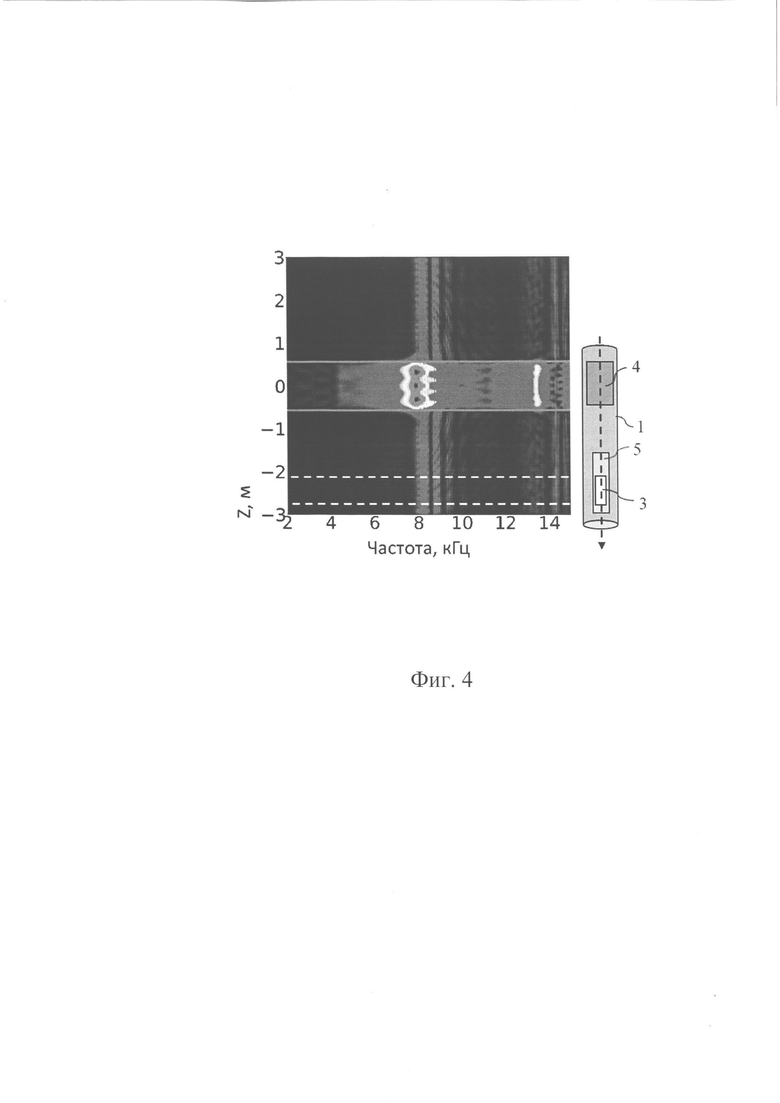
Ввиду особенностей распространения волн в волноводной системе (см., например, Исакович М. А., Общая акустика, М., 1973 - § 69, 81, стр. 230-232, 269-271) акустическое поле от ДШ приходит в место расположения ДБВ уже в виде набора бегущих волн. Фиг. 4 иллюстрирует это изменение спектра в скважине от источника ДШ: слева представлена спектрограмма ДШ вдоль оси скважины, справа - фрагмент прибора с источником 4 этого ДШ (центратор) и ДБВ 3. Хорошо видно, что сложный спектр ДШ вблизи источника (интервал от -0.5 м до 0.5 м между двумя серыми линиями) трансформировался преимущественно в вертикальные полосы вблизи расположения ДБВ 3 (интервал от 2.1 м до 2.5 м между двумя пунктирными линиями), представляющие собой изображения бегущих волн на спектрограмме, причем для трансформации понадобился интервал не более нескольких десятков сантиметров от источника.
Преобладание в дорожном шуме, регистрируемым ДБВ, структур в виде бегущих волн вдоль ствола скважины является одним из важных физических явлений, лежащих в основе изобретения.
Соответственно конструкция детектора бегущих волн, составляющая основу изобретения, обеспечивает проведение измерений, позволяющих регистрировать бегущие волны, и дополняется алгоритмом подавления бегущих волн при обработке этих измерений.
Детектор бегущих волн проводит, например, измерения акустического шума одновременно в трех точках, расположенных последовательно вдоль оси шумомера на одинаковом расстоянии друг от друга, составляющем четверть длины волны самой коротковолновой бегущей волны, содержащейся в акустическом шуме и подлежащей подавлению. Подавление бегущих волн осуществляется с помощью определения второй разности измеряемых сигналов. Эта вторая разность определяется в случае использования трех точек измерения вычитанием удвоенного акустического шума, измеренного в средней точке, из суммы акустических шумов, измеренных в двух крайних точках.
Возможно использование двух дифференциальных датчиков, расположенных последовательно вдоль оси шумомера. Подавление бегущих волн также осуществляется с помощью определения второй разности измеряемых сигналов. Эта вторая разность определяется в данном случае путем вычитания акустического шума, измеренного одним датчиком, из акустического шума, измеренного другим датчиком.
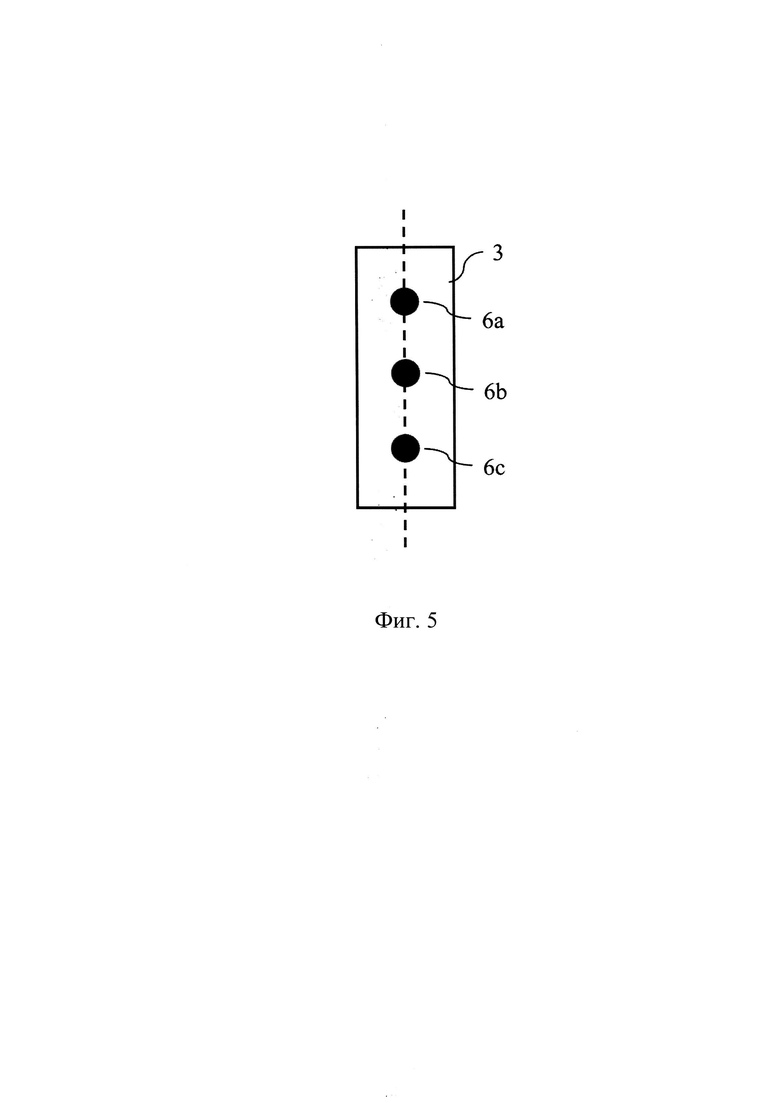
Как пример конструкции ДБВ 3 рассмотрим на Фиг. 5 следующую схему из трех одинаковых акустических датчиков 6а, 6b, 6с, расположенных вдоль оси шумомера последовательно на одинаковом расстоянии Δz друг от друга и обеспечивающих возможность получения второй разности измеряемого акустического шума вдоль ствола скважины. Расстояние между соседними датчиками составляет около четверти длины волны максимальной из частот, обрабатываемых в процессе подавления бегущих волн (например, 2.5 сантиметра при максимальной частоте подавления 10кГц и скорости звука в среде между датчиками 1000 м/с).
Сигналы измеренного акустического шума детектором бегущих волн передаются на поверхность в вычислительный блок, обеспечивающий выделение полезного шума из суммарного шума путем подавления бегущих волн, в том числе и в режиме реального времени. Таким образом обеспечивается возможность контроля качества записываемых сигналов, а также выявление необходимости более тщательного обследования скважины в местах обнаруженных источников полезного шума со скорректированной скоростью перемещения шумомера. Возможен вариант, когда шумомер дополнительно снабжен блоком памяти, в который записываются измеряемые сигналы. После извлечения шумомера на поверхность измеренные сигналы считываются из блока памяти и передаются в вычислительный блок для осуществления дополнительного анализа.
Как пример способа подавления бегущих волн при обработке измерений детектора бегущих волн рассмотрим следующий алгоритм. Замеренное акустическое давление в каждом из акустических датчиков 6а, 6b, 6с детектора бегущих волн 3 в момент времени tn обозначим через

При это полагаем, что моменты времени …, tn-l, tn, tn+1, … идут через постоянный промежуток Δt=tn - tn-1.
Алгоритм использует одномерный волновой оператор для подавления бегущих волн. Бегущая волна (БВ) вдоль оси z представляет собой функцию A(r, ϕ)pTW(t, z), в которой первый множитель является распределением амплитуды в поперечном сечении, а второй множитель удовлетворяет одномерному волновому уравнению Даламбера

где cTW - скорость распространения БВ в среде, где находятся акустические датчики. Мы полагаем в примере, что ДБВ 3 расположен в центре кругового сечения скважины 1, т.е., r=0. Нормируя функцию распределения амплитуды как А(0,ϕ)=1, получаем, что pTW - акустическое давление БВ в центре кругового сечения скважины.
Пусть регистрируемое давление р является суммой полезного шума pUN и бегущей волны pTW, которая удовлетворяет (2):

Тогда, очевидно, применив к (3) волновой оператор из (2), получаем

т.е., правая часть ƒ не содержит зависимости от pTW (как если бы слагаемое pTW в регистрируемом давлении (3) отсутствовало).
Таким образом можно применить к замерам ДБВ волновой оператор из (2) с набором скоростей cTW, соответствующих бегущим волнам, чтобы погасить эту часть ДШ в регистрируемом суммарном шуме «ПШ+ДШ». Технически это можно осуществить, перейдя в частотную область.
Конкретные значения скоростей cTW можно приближенно оценить, анализируя акустическое поле, регистрируемое ДБВ в отсутствии ПШ.
Дискретный аналог волнового оператора, применяемый к замерам (1), строится на основе конечных разностей:

Перейдем в частотную область, применив к (1) и (5) преобразование Фурье. Для этого выбираем некоторый интервал времени, который хотим проанализировать, [tn,…, tn+N], где N - соответствующее число отсчетов, и используем, например, оператор быстрого преобразования Фурье FFT. Тогда

а (5) примет вид

(для простоты индекс у дискретной частоты ω опущен).
Оператор подавления бегущих волн TWS (Travelling Waves Suppression operator) в частотной области имеет вид

где  - некоторый эффективный коэффициент, зависящий от частоты. Его теоретическое значение оценивается как
- некоторый эффективный коэффициент, зависящий от частоты. Его теоретическое значение оценивается как 
Практическое значение коэффициента  используемое для применения оператора TWS при обработке реальных данных, получается в процессе настройки оператора подавления бегущих волн и может проводиться различными методами. Как пример такой настройки рассмотрим следующий метод. Берется набор данных (1), соответствующий измерению преимущественно дорожного шума. Производится преобразование (6) этих данных и вычисляется мгновенное значение коэффициента
используемое для применения оператора TWS при обработке реальных данных, получается в процессе настройки оператора подавления бегущих волн и может проводиться различными методами. Как пример такой настройки рассмотрим следующий метод. Берется набор данных (1), соответствующий измерению преимущественно дорожного шума. Производится преобразование (6) этих данных и вычисляется мгновенное значение коэффициента

соответствующее очень маленькому смещению прибора вдоль ствола. Например, при движении шумомера со скоростью 600 м/ч и времени записи одного набора данных (1) t=0.02 с, смещение прибора не превышает 3.5 мм. Поэтому, для учета неоднородности ДШ из-за наличия случайных выбросов и помех проводится усреднение нескольких десятков предыдущих мгновенных значений  полученных к моменту текущего вычисления значения
полученных к моменту текущего вычисления значения  Это средневзвешенное значение и принимается за
Это средневзвешенное значение и принимается за  При этом возникновение некоторого систематического отклонения
При этом возникновение некоторого систематического отклонения  от
от  которое, например, может наблюдаться, начиная с некоторого момента времени, может служить индикатором начала участка появления ПШ в суммарном шуме.
которое, например, может наблюдаться, начиная с некоторого момента времени, может служить индикатором начала участка появления ПШ в суммарном шуме.
Набор данных, соответствующий измерению преимущественно дорожного шума, можно получать, например, путем контрольной остановки сборки приборов, чтобы быть уверенным, что замеренный детектором бегущих волн непосредственно до остановки шум был вызван именно дорожным шумом.
Для демонстрации работы предложенного способа акустической шумометрии с подавлением бегущих волн при обработке данных детектора бегущих волн проведено численное моделирование, в котором используется упрощенная схема с элементами, имитирующими рассматриваемое явление.
В упрощенной схеме, показанной на Фиг 6, сборка приборов с детектором бегущих волн в открытом стволе скважины, заполненной жидкостью, приближенно моделируется как металлическая болванка 7, в которой есть зазор для измерения акустического поля в жидкости на оси скважины в трех точках, соответствующих акустическим датчикам 6а, 6b, 6с. За величину Δz в (9) принимаем расстояние между точками. Дорожный шум приходит от двух источников ДШ 4а, 4b, имитирующих шум от центраторов, расположенных на расстоянии нескольких десятков сантиметров по разные стороны от зазора. Полезный шум приходит от источника ПШ 2 протяженностью несколько десятков сантиметров; его центр совпадает с центром зазора.
Для типовых значений параметров задачи используются величины:
диапазон частот бегущих волн в ДШ
0.5 кГц≤ftw≤10 кГц, ω=2πf
интервал между отсчетами в одном наборе данных Δt=10-5 с длина записи одного набора данных N=2000 отсчетов, т.е. время записи t=0.02 с
шаг по частоте для FFT Δf=50 Гц
радиус скважины r=0.076 м.
источники задаются набором частот с прямоугольным спектром.
На этапе настройки оператора подавления бегущих волн вычисляется  Для этого выполняется расчет только с источниками ДШ 4а, 4b и записываются данные (1) в точках акустических датчиков. Для имитации неравномерности дорожного шума по времени добавляется случайный шум к этим данным (5% от максимума амплитуды), и затем производится FFT и вычисляется функция
Для этого выполняется расчет только с источниками ДШ 4а, 4b и записываются данные (1) в точках акустических датчиков. Для имитации неравномерности дорожного шума по времени добавляется случайный шум к этим данным (5% от максимума амплитуды), и затем производится FFT и вычисляется функция  согласно (9). Для имитации вычисления средневзвешенного значения
согласно (9). Для имитации вычисления средневзвешенного значения  , проводится 10-ти процентное искажение каждого мгновенного значения
, проводится 10-ти процентное искажение каждого мгновенного значения  :
:
 где
где  - случайное комплексное число.
- случайное комплексное число.
На этапе формирования суммарного шума включается источник ПШ 2 и его шум добавляется в данные (1) от источников ДШ 4а, 4b. При этом уровень шума от ПШ 2 подбирается так, чтобы он составлял не более 5% от ДШ в точке акустического датчика 6b. На Фиг. 7 представлены графики спектра ДШ (серая линия из точек) и суммарного шума (сплошная черная линия), полученного сложением с ПШ; оба сигнала регистрируются в точке центрального акустического датчика 6b. Видно, что, как и задумано, отличие в 5% почти незаметно и может оказаться недостаточным для уверенного распознавания присутствия ПШ в сигнале (аналогичные графики получаются в двух соседних точках 6а, 6 с акустических датчиков).
Эффект применения способа подавления ДШ, т.е., действие оператора TWS, определенного в (8), на сигналы в трех точках 6а, 6b, 6 с изображен на Фиг. 8: графики результата действия оператора TWS на ДШ (серая кривая из точек) и на суммарный шум (сплошная черная кривая). Видно, что отличие в графиках уже существенное, и оно может оказаться достаточным для уверенного распознавания присутствия ПШ.
Распознавание присутствия ПШ на фоне ДШ проводится путем совместного анализа изменения спектров на Фиг. 7 и 8 во время движения ДБВ. Совместный анализ спектра шума от датчика 6b (Фиг. 7) и спектра после воздействия оператора TWS на шум от датчиков 6а, 6b, 6с (Фиг. 8) может опираться на следующие три основных типа поведения этих спектров при прохождении ДБВ некоторого интервала скважины: а) если на этом интервале нет ПШ, то обе сплошные кривые на Фиг. 7 и 8 практически не изменяют свою форму (они будут совпадать с серыми кривыми); если же на этом интервале есть ПШ, как показано на Фиг. 1, то б) при слабом ПШ сплошная кривая на Фиг. 7 практически не изменяет свою форму в моменты t1, t2 и t3 на Фиг. 1, в то время как сплошная кривая на Фиг. 8 начинает отклоняться от ее положения в момент t1, достигает максимального отклонения в момент t2 и опять возвращается в исходное положение в момент t3; в) при сильном ПШ обе сплошные кривые на Фиг. 7, 8 претерпевают сильные отклонения в момент t2.
Таким образом описываемый способ скважинной акустической шумометрии обеспечивает возможность выделения полезного шума на фоне дорожного шума и непрерывного обнаружения источников полезного шума в стволе скважины в процессе движения шумомера с детектором бегущих волн.
Указанный совместный анализ изменения двух спектров во время движения может использоваться также с целью формирования наборов данных (1), соответствующих измерению преимущественно дорожного шума и применяемых для вычисления  что позволяет избегать (сокращать число) контрольных остановок сборки приборов, о которых говорилось выше.
что позволяет избегать (сокращать число) контрольных остановок сборки приборов, о которых говорилось выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЯВЛЕНИЯ ИНТЕРВАЛОВ ПРИТОКА И ПОГЛОЩЕНИЯ ФЛЮИДОВ В РАБОТАЮЩИХ НЕФТЕГАЗОВЫХ СКВАЖИНАХ | 2022 |
|
RU2788999C1 |
| Способ детектирования зон выноса твердых частиц через непроницаемый барьер в скважине | 2020 |
|
RU2749589C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАБОТАЮЩИХ ИНТЕРВАЛОВ ГЛУБИН НЕФТЯНЫХ И ГАЗОВЫХ ПЛАСТОВ | 2019 |
|
RU2728123C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ФИЛЬТРАЦИОННОГО ПОТОКА В ОКОЛОСКВАЖИННОЙ ЗОНЕ ПЛАСТА | 2019 |
|
RU2728121C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ ОБЪЕМНЫХ ДОЛЕЙ ФЛЮИДОВ ПО СТВОЛУ СКВАЖИНЫ | 2019 |
|
RU2728119C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ КАЧЕСТВА ЦЕМЕНТИРОВАНИЯ СКВАЖИН И РАЗОБЩЕНИЯ ПЛАСТОВ-КОЛЛЕКТОРОВ | 2007 |
|
RU2405936C2 |
| СИСТЕМА ДИАГНОСТИКИ ПРОЦЕССОВ ГИДРОРАЗРЫВА ПЛАСТА И СПОСОБ ЕЁ РАБОТЫ | 2022 |
|
RU2792427C1 |
| СПОСОБ ОЦЕНКИ ПРОФИЛЯ ФАЗОВОЙ ПРОНИЦАЕМОСТИ В НЕФТЯНЫХ И ГАЗОВЫХ ЭКСПЛУАТАЦИОННЫХ СКВАЖИНАХ | 2019 |
|
RU2707311C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРОЗИИ ОБСАДНЫХ КОЛОНН В ЭКСПЛУАТАЦИОННЫХ СКВАЖИНАХ | 2015 |
|
RU2593926C1 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2648743C2 |
Изобретение относится к способам промыслово-геофизических исследований в нефтяных и газовых скважинах, в частности к способам регистрации акустического шума в скважине. В соответствии с предлагаемым способом скважинной акустической шумометрии вдоль ствола скважины перемещают шумомер, содержащий детектор бегущих волн, обеспечивающий возможность одновременного измерения в по меньшей мере трех точках вдоль оси шумомера суммарного акустического шума, представляющего собой сумму акустических сигналов, приходящих от источников полезного шума, когда детектор бегущих волн находится в непосредственной близости от источников полезного шума в стволе скважины, и акустических сигналов от бегущих волн, приходящих от источников шума, удаленных от детектора бегущих волн по стволу скважины на расстояние, на котором генерируемый удаленными источниками шум в месте расположения детектора представляет собой бегущие волны. В процессе перемещения шумомера осуществляют измерения суммарного акустического шума и осуществляют обработку измеренного акустического шума, заключающуюся в выделении акустических сигналов от источников полезного шума путем подавления бегущих волн, чем обеспечивается обнаружение местоположения источников полезного шума. Технический результат, достигаемый при реализации изобретения, заключается в повышении разрешающей способности и сокращении времени проведения скважинной акустической шумометрии посредством обеспечения в процессе движения акустических датчиков возможности выделения полезного шума на фоне дорожного шума и непрерывного обнаружения источников полезного шума в стволе скважины. 3 з.п. ф-лы, 8 ил.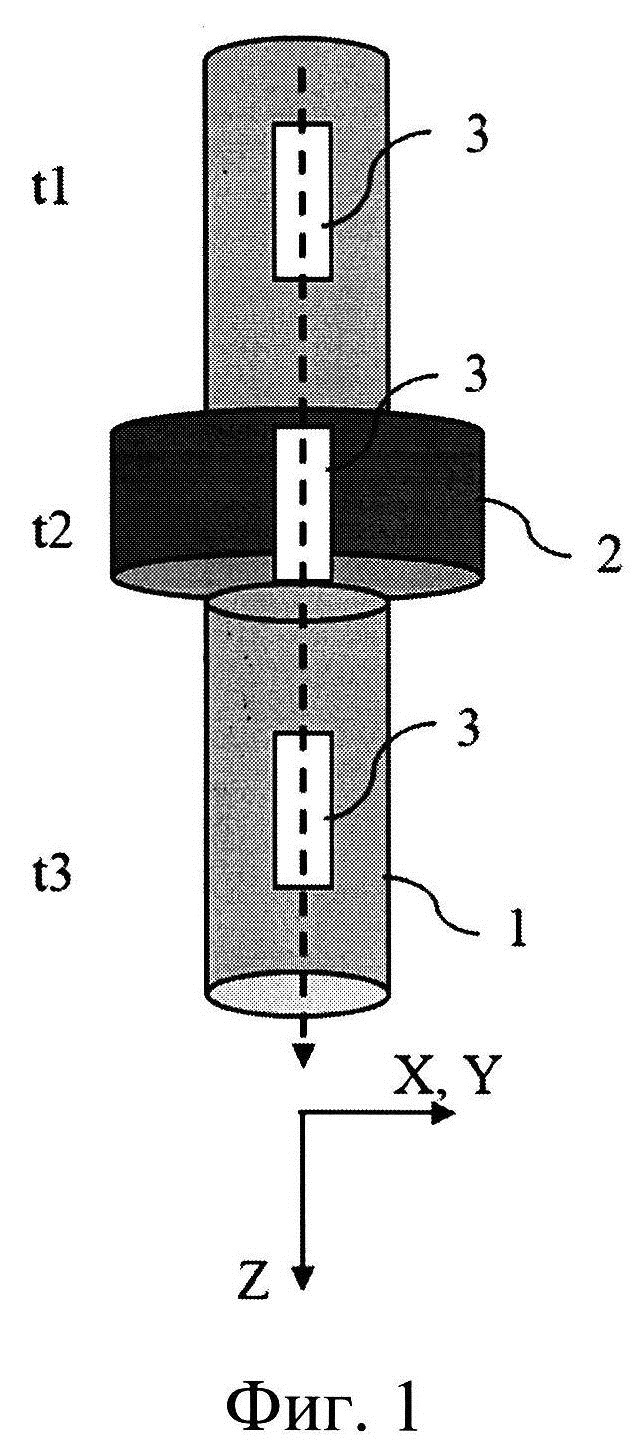
1. Способ скважинной акустической шумометрии, в соответствии с которым:
- вдоль ствола скважины перемещают шумомер, содержащий детектор бегущих волн, обеспечивающий возможность одновременного измерения в по меньшей мере трех точках вдоль оси шумомера суммарного акустического шума, представляющего собой сумму акустических сигналов, приходящих от источников полезного шума, когда детектор бегущих волн находится в непосредственной близости от источников полезного шума в стволе скважины, и акустических сигналов от бегущих волн, приходящих от источников шума, удаленных от детектора бегущих волн по стволу скважины на расстояние, на котором генерируемый удаленными источниками шум в месте расположения детектора представляет собой бегущие волны,
- в детекторе бегущих волн содержатся акустические датчики, расположенные последовательно вдоль оси шумомера на одинаковом расстоянии друг от друга, составляющем четверть длины волны бегущей волны, имеющей самую короткую длину волны из всех бегущих волн, подлежащих подавлению,
- в процессе обработки акустического шума, измеренного датчиками детектора, определяют значение второй разности акустического шума путем вычитания удвоенного акустического шума, измеренного средним из какой-либо тройки последовательно идущих датчиков, из суммы акустических шумов, измеренных двумя соседними датчиками, а подавление бегущих волн осуществляют путем применения одномерных волновых операторов Даламбера в частотной или временной областях со скоростями волн, соответствующих подавляемым бегущим волнам, к измеренному этими тремя датчиками акустическому шуму с использованием полученного значения второй разности акустического шума,
- в процессе перемещения шумомера осуществляют измерения суммарного акустического шума детектором бегущих волн и осуществляют обработку измеренного акустического шума, заключающуюся в выделении акустических сигналов от источников полезного шума путем подавления бегущих волн, чем обеспечивается обнаружение местоположения источников полезного шума.
2. Способ скважинной акустической шумометрии по п. 1, в соответствии с которым детектор бегущих волн содержит три акустических датчика.
3. Способ скважинной акустической шумометрии по п. 1, в соответствии с которым обработку измеренного детектором бегущих волн акустического шума осуществляют в вычислительном блоке на поверхности в режиме реального времени непосредственно при проведении измерений.
4. Способ скважинной акустической шумометрии по п. 1, в соответствии с которым шумомер дополнительно снабжен блоком памяти, в который записывают акустический шум, измеренный детектором бегущих волн, и после извлечения шумомера на поверхность осуществляют дополнительный анализ измеренного акустического шума.
| US 20170321540 A1, 09.11.2017 | |||
| US 4353122 A, 05.10.1982 | |||
| WO 2019054905 A1, 21.03.2019 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ СКВАЖИННОЙ СПЕКТРАЛЬНОЙ ШУМОМЕТРИИ | 2012 |
|
RU2499283C1 |
| US 20150124562 A1, 07.05.2015 | |||
| WO 2004111388 A1, 23.12.2004. | |||

