Ссылка на родственную заявку
Эта заявка притязает на приоритет предварительной китайской заявки на патент № 202110033059.0 от 11 января 2021 г., все содержание которой включено в этот документ посредством ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к области моделирования вибрации и более конкретно к системе для моделирования воздействия головы на вибрацию вибрационного блока.
Уровень техники
Вибрационный блок может генерировать вибрационный сигнал и передавать этот вибрационный сигнал в голову человека (например, кости головы). Чтобы смоделировать воздействие человеческой головы на вибрацию вибрационного блока для понимания характеристик вибрации вибрационного блока, обычно необходимо связать вибрационный блок с устройством для моделирования человеческой головы. В некоторых прикладных сценариях, когда вибрационный блок используют в качестве гарнитуры костной проводимости или слухового аппарата костной проводимости, вибрационный блок устанавливают в области лица спереди перед ушной раковиной пользователя, а кость в той области человеческой головы является сравнительно мягкой по сравнению с черепом, сосцевидным отростком и т.д. То есть механический импеданс области лица спереди перед ушной раковиной пользователя существенно отличается от механического импеданса других частей человеческой головы. Тем не менее, существующее устройство для моделирования человеческой головы, в целом, моделирует механический импеданс сосцевидного отростка позади уха пользователя, что, очевидно, не может соответствовать сценарию, в котором вибрационный блок располагают в области лица перед ушной раковиной человека.
Поэтому, необходимо предложить импедансное устройство для моделирования области лица спереди ушной раковины человека и систему для моделирования ее воздействия на вибрацию вибрационного блока.
Раскрытие сущности изобретения
В некоторых вариантах осуществления настоящего изобретения предложено импедансное устройство, содержащее: компонент массы, по меньшей мере один упругий компонент и неподвижный компонент. Компонент массы соединен с неподвижным компонентом посредством по меньшей мере одного упругого компонента. Между компонентом массы и неподвижным компонентом расположен демпфирующий компонент, который обеспечивает демпфирование перемещения компонента массы относительно неподвижного компонента. Когда компонент массы контактирует с внешним вибрационным блоком, компонент массы принимает вибрацию внешнего вибрационного блока и перемещается относительно неподвижного компонента. Масса компонента массы находится в диапазоне от 0,5 г до 5 г, коэффициент упругости по меньшей мере одного упругого компонента находится в диапазоне от 600 Н/м до 5000 Н/м, коэффициент демпфирования демпфирующего компонента находится в диапазоне от 1 до 4, а импедансное устройство обеспечивает внешнему вибрационному блоку механический импеданс в диапазоне от 6 дБ до 50 дБ.
В некоторых вариантах осуществления масса компонента массы находится в диапазоне от 1 г до 3,6 г, коэффициент упругости по меньшей мере одного упругого компонента находится в диапазоне от 900 Н/м до 1700 Н/м, а коэффициент демпфирования демпфирующего компонента находится в диапазоне от 2 до 3,7.
В некоторых вариантах осуществления амплитудно-частотная характеристика импедансного устройства имеет впадину, причем значение впадины находится в диапазоне от 6 дБ до 15 дБ.
В некоторых вариантах осуществления, если частота меньше частоты, соответствующей значению впадины, то механический импеданс импедансного устройства снижается с увеличением частоты; если частота больше частоты, соответствующей значению впадины, то механический импеданс импедансного устройства увеличивается с увеличением частоты.
В некоторых вариантах осуществления неподвижный компонент включает в себя неподвижный рычаг, компонент массы расположен напротив неподвижного рычага, одна сторона компонента массы обращена к неподвижному рычагу, а другая сторона компонента массы обращена от неподвижного рычага.
В некоторых вариантах осуществления демпфирующий компонент расположен между компонентом массы и неподвижным рычагом.
В некоторых вариантах осуществления демпфирующий компонент включает в себя по меньшей мере одно из пружинного демпфера, гидравлического демпфера, фрикционного демпфера, демпфера пульсаций, ротационного демпфера, вязкого демпфера, воздушного демпфера, демпферного шарнира или демпфирующих салазок.
В некоторых вариантах осуществления указанный по меньшей мере один упругий компонент включает в себя пружину, а демпфирующий компонент вставлен в пружину или расположен вокруг нее.
В некоторых вариантах осуществления неподвижный компонент представляет собой конструкцию корпуса с одним открытым концом, а компонент массы подвешен в отверстии конструкции корпуса с помощью указанного по меньшей мере одного упругого компонента.
В некоторых вариантах осуществления указанный по меньшей мере один упругий компонент включает в себя первую концевую часть и вторую концевую часть, причем первая концевая часть указанного по меньшей мере одного упругого компонента соединена с боковой стенкой компонента массы, а вторая концевая часть указанного по меньшей мере одного упругого компонента соединена с внутренней стенкой конструкции корпуса.
В некоторых вариантах осуществления указанный по меньшей мере один упругий компонент может включать в себя множество упругих компонентов, и указанное множество упругих компонентов распределены по боковой стенке компонента массы с интервалами.
В некоторых вариантах осуществления указанный по меньшей мере один упругий компонент включает в себя по меньшей мере одно из пружины сжатия, пружины растяжения, торсионной пружины, спиральной пружины или плоской пружины.
В некоторых вариантах осуществления указанный по меньшей мере один упругий компонент дополнительно включает в себя сетчатую конструкцию.
В некоторых вариантах осуществления демпфирующий компонент расположен между компонентом массы и нижней стенкой конструкции корпуса, причем один конец демпфирующего компонента соединен со стороной компонента массы, а другой конец демпфирующего компонента соединен с нижней стенкой конструкции корпуса.
В некоторых вариантах осуществления между компонентом массы и конструкцией корпуса образована герметичная полость, а газ в герметичной полости образует указанный по меньшей мере один упругий компонент.
В других вариантах осуществления настоящего изобретения предложена система для моделирования воздействия головы на вибрацию вибрационного блока. Система включает в себя вибрационный блок, выполненный с возможностью подавать вибрационный сигнал; импедансное устройство, причем импедансное устройство контактирует с вибрационным блоком и обеспечивает механический импеданс вибрационному блоку; коннектор, выполненный с возможностью соединять вибрационный блок с импедансным устройством; и датчик, выполненный с возможностью собирать информацию о параметрах вибрационного блока во время процесса вибрации.
В некоторых вариантах осуществления коннектор обеспечивает давление в диапазоне от 0,05 Н до 3,5 Н между вибрационным блоком и импедансным устройством.
В некоторых вариантах осуществления площадь области соединения импедансного устройства и вибрационного блока находится в диапазоне от 0,25 см2 до 4 см2.
В некоторых вариантах осуществления коннектор включает в себя основание, опорный стержень и фиксирующий элемент, причем опорный стержень соединен с основанием, фиксирующий элемент включает в себя первую концевую часть и вторую концевую часть, причем первая концевая часть фиксирующего элемента соединена с опорным стержнем, а вторая концевая часть фиксирующего элемента соединена с вибрационным блоком.
В некоторых вариантах осуществления система также включает в себя модель головы, а импедансное устройство расположено вблизи области козелка ушной раковины модели головы.
В некоторых вариантах осуществления коннектор представляет собой лентообразную конструкцию, и лентообразная конструкция окружает модель головы и закрепляет вибрационный блок на импедансном устройстве.
В некоторых вариантах осуществления коннектор представляет собой заушник, причем заушник адаптирован к ушной раковине модели головы, и заушник крепит вибрационный блок на импедансном устройстве.
Краткое описание чертежей
На фиг. 1 показана принципиальная схема импедансного устройства 100 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 2 показана схематическая структурная диаграмма импедансного устройства 200 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 3 показана схематическая структурная диаграмма импедансного устройства 300 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 4 показана схематическая структурная диаграмма импедансного устройства 400 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 5 показана схематическая структурная диаграмма импедансного устройства 500 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 6 показана схематическая структурная диаграмма импедансного устройства 600 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 7 показана схематическая структурная диаграмма импедансного устройства 700 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 8 приведен вид сверху конструкции импедансного устройства 800 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 9 приведен вид сверху конструкции импедансного устройства 800 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 10 показана схематическая структурная диаграмма импедансного устройства 1000 в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 11 приведена диаграмма модели аналоговой схемы механического импеданса импедансного устройства в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 12 показана принципиальная схема системы для моделирования воздействия головы на вибрацию вибрационного блока в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 13 показана схема моделируемого положения области соединения между вибрационным блоком и головой в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 14 показана схематическая структурная диаграмма системы для моделирования воздействия головы на вибрацию вибрационного блока в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 15 показана схематическая диаграмма распределения датчиков в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 16 показана схематическая структурная диаграмма установки коннектора и модели головы в соответствии с некоторыми вариантами осуществления настоящего изобретения;
на фиг. 17 показана схематическая структурная диаграмма установки коннектора и модели головы в соответствии с другими вариантами осуществления настоящего изобретения; и
на фиг. 18 показана диаграмма амплитудно-частотной характеристики системы для моделирования воздействия головы на вибрацию вибрационного блока.
Осуществление изобретения
Для того чтобы более ясно проиллюстрировать технические решения вариантов осуществления настоящего изобретения, ниже будут кратко представлены чертежи, которые необходимо использовать в описании вариантов осуществления. Очевидно, что чертежи в последующем описании являются лишь некоторыми примерами или вариантами осуществления изобретения. Для специалистов в данной области, без творческой работы, изобретение может быть применено к другим подобным сценариям в соответствии с этими чертежами. Если это не очевидно из языкового контекста или не указано иным образом, одни и те же ссылочные позиции на чертежах представляют одну и ту же структуру или операцию.
Следует понимать, что используемые в этом документе термины "система", "устройство", "блок" и/или "модуль" представляют собой способ различения различных компонентов, элементов, частей, деталей или узлов разных уровней. Однако, если другие слова могут достичь той же цели, эти слова могут быть заменены другими выражениями.
Как показано в настоящем раскрытии и формуле изобретения, если контекст явно не предполагает исключительных обстоятельств, то формы единственного числа не только относятся к конкретно единственному числу, но также включают в себя множественное число. Вообще говоря, термины "включающий в себя" и "содержат" только предполагают, что включены операции и элементы, которые были четко идентифицированы, и эти операции и элементы не составляют исключительный список, и способ или устройство могут также включать в себя другие операции или элементы.
Варианты осуществления настоящего изобретения описывают импедансное устройство. В некоторых вариантах осуществления импедансное устройство может включать в себя компонент массы, упругий компонент и неподвижный компонент. Компонент массы может быть соединен с неподвижным компонентом посредством упругого компонента. Компонент массы может быть использован для обеспечения массы, и когда внешний вибрационный блок соединен с компонентом массы, компонент массы может имитировать массовую нагрузку, подаваемую обратно головой на вибрационный блок. Вибрационный блок может относиться к элементу, способному генерировать вибрационный сигнал. В некоторых вариантах осуществления вибрационный блок может быть применен в аудиоустройстве (например, динамике, наушнике, проигрывателе и т.д.), и вибрационный блок преобразует аудиосигнал в вибрационный сигнал. В некоторых вариантах осуществления вибрационный блок также может быть применен в слуховом устройстве (например, слуховом аппарате и т.д.). Упругий компонент может быть использован для обеспечения упругости при перемещении компонента массы, которая может имитировать упругость кожи головы. В некоторых вариантах осуществления импедансное устройство также может включать в себя демпфирующий компонент. Демпфирующий компонент может быть использован для моделирования демпфирования головы вибрационного блока. В некоторых вариантах осуществления демпфирующий компонент расположен между компонентом массы и неподвижным компонентом и обеспечивает демпфирование перемещения компонента массы относительно неподвижного компонента. Когда компонент массы контактирует с внешним вибрационным блоком, компонент массы принимает вибрацию вибрационного блока и перемещается относительно неподвижного компонента.
Регулируя параметры компонента массы, упругого компонента и/или демпфирующего компонента в импедансном устройстве, импедансное устройство может моделировать воздействие различных областей головы на вибрационный блок. В некоторых вариантах осуществления, чтобы моделировать воздействие лицевой области на передней стороне ушной раковины головы человека (также называемой областью вблизи козелка) на вибрационный блок, параметры компонента массы, упругого компонента и/или демпфирующего компонента в импедансном устройстве могут быть отрегулированы следующим образом: когда давление между компонентом массы и вибрационным блоком находится в диапазоне от 0,05 до 3,5 Н, импедансное устройство обеспечивает вибрационному блоку механический импеданс в диапазоне от 6 до 50 дБ. При ежедневной установке вблизи области козелка давление в диапазоне от 0,05 до 3,5 Н является сравнительно комфортным давлением, к которому человеческий организм может адаптироваться. Импедансное устройство подает обратно на вибрационный блок механический импеданс в диапазоне от 6 дБ до 50 дБ в ответ на давление в вышеуказанном диапазоне, прикладываемое вибрационным блоком, таким образом, можно смоделировать фактическое сопротивление, оказываемое на вибрационный блок, образованный вблизи области козелка во время фактического использования. В некоторых вариантах осуществления кривая амплитудно-частотной характеристики механического импеданса импедансного устройства имеет впадину в определенном диапазоне частот (например, 50 Гц-500 Гц), то есть механический импеданс импедансного устройства имеет минимальное значение (также называемое значением впадины) в конкретном диапазоне частот. Кроме того, если частота меньше частоты, соответствующей значению впадины, то механический импеданс импедансного устройства снижается с увеличением частоты; если частота больше частоты, соответствующей значению впадины, то механический импеданс импедансного устройства увеличивается с увеличением частоты. В некоторых вариантах осуществления конкретный диапазон частот не ограничен вышеупомянутыми 50 Гц-500 Гц. В некоторых вариантах осуществления конкретный диапазон частот также может представлять собой другие частотные диапазоны, такие как 60 Гц-400 Гц, 70 Гц-300 Гц, 80 Гц-200 Гц или любое значение частоты в диапазоне. В некоторых вариантах осуществления параметры компонента массы, упругого компонента и/или демпфирующего компонента импедансного устройства могут быть отрегулированы таким образом, чтобы механический импеданс, обеспечиваемое импедансным устройством, соответствовало или приблизительно соответствовало механическому импедансу вблизи области козелка головы. Например, в некоторых вариантах осуществления демпфирование импедансного устройства может быть отрегулировано таким образом, чтобы значение механического импеданса, обеспечиваемое импедансным устройством, соответствовало или приблизительно соответствовало значению механического импеданса в области козелка головы. В качестве другого примера, в некоторых вариантах осуществления масса компонента массы и коэффициент упругости упругого компонента могут быть отрегулированы таким образом, чтобы частота, соответствующая значению впадины, находилась в пределах определенн ого частотного диапазона.
Следует отметить, что давление между компонентом массы и вибрационным блоком может не находиться в вышеупомянутом диапазоне, например, может быть менее 0,05 Н или более 3,5 Н. Кроме того, механический импеданс, обеспечиваемий импедансным устройством вибрационному блоку, не ограничен вышеупомянутым диапазоном. Например, импедансное устройство может обеспечивать механический импеданс вибрационному блоку, равный 58 дБ. В качестве другого примера, импедансное устройство может обеспечивать механический импеданс вибрационному блоку, равный 3 дБ. Что касается давления между компонентом массы и вибрационным устройством, а также параметров компонента массы, упругого компонента и демпфирующего компонента, следует обратиться к содержимому, описанному в другом месте настоящего описания.
На фиг. 1 показана принципиальная схема импедансного устройства 100 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 1, импедансное устройство 100 может включать в себя компонент 101 массы, упругий компонент 102, демпфирующий компонент 103 и неподвижный компонент 104. В некоторых вариантах осуществления компонент 10 массы может быть соединен с неподвижным компонентом 104 посредством упругого компонента 102. В некоторых вариантах осуществления компонент 101 массы может быть соединен с неподвижным компонентом 104 физическим соединением через упругий компонент 102. Физическое соединение, описанное в настоящем описании, может включать в себя сварку, защелкивание, склеивание или цельное формование или подобное, или любую их комбинацию.
В некоторых вариантах осуществления, когда компонент 101 массы контактирует или связан с внешним вибрационным блоком, компонент 101 массы принимает вибрацию вибрационного блока и перемещается относительно неподвижного компонента 104. В некоторых вариантах осуществления компонент 101 массы может находиться в непосредственном контакте или быть непосредственно соединен с вибрационным блоком, и вибрационный блок непосредственно толкает компонент 101 массы для перемещения, когда вибрационный блок генерирует вибрацию. В некоторых вариантах осуществления компонент 101 массы может находиться в контакте или быть непосредственно соединен с вибрационным блоком через другие конструкции или компоненты (например, защитную пленку и т.д.), и компонент 101 массы воспринимает вибрацию вибрационного блока для перемещения. В некоторых вариантах осуществления, когда давление между компонентом 101 массы и вибрационным блоком находится в диапазоне от 0,05 Н до 3,5 Н, импедансное устройство 100 может обеспечивать вибрационному блоку механический импеданс в диапазоне от 6 дБ до 50 дБ. Давление в диапазоне от 0,05 Н до 3,5 Н является подходящим давлением вблизи области козелка головы, а механический импеданс в диапазоне от 6 дБ до 50 дБ имитирует фактическое сопротивление, оказываемое на вибрационный блок вблизи области козелка при фактическом использовании. В некоторых вариантах осуществления, когда импедансное устройство 100 используют для имитации механического импеданса других частей головы человека, давление между компонентом 101 массы и вибрационным блоком может составлять менее 0,05 Н или более 3,5 Н.
Компонент 101 массы может относиться к объекту, имеющему определенный вес. В импедансном устройстве 100 компонент 101 массы может быть использован для представления массовой нагрузки, подаваемой обратно на вибрационный блок вблизи области козелка головы. Компонент 101 массы также называют инерционным компонентом. Когда вибрационный блок соединен с компонентом 101 массы, вибрационный блок толкает компонент 101 массы, чтобы перемещаться вместе с ним во время процесса вибрации. В это время компонент 101 массы и вибрационный блок поддерживают одну и ту же фазу и имеют одинаковое или приблизительно одинаковое вибрационное ускорение. В некоторых вариантах осуществления форма компонента 101 массы может включать в себя, помимо прочего, правильную структуру, такую как цилиндр, кубоид, конус, усеченный конус, сфера или тому подобное, или неправильную структуру. В некоторых вариантах осуществления материал компонента 101 массы может включать в себя, помимо прочего, любой жесткий материал, такой как пластик, дерево или металл, или тому подобное. В некоторых вариантах осуществления для обеспечения механического импеданса импедансного устройства в диапазоне от 6 дБ до 50 дБ масса компонента 101 массы может находиться в диапазоне от 0,5 г до 5 г. Предпочтительно, масса компонента 101 массы может находиться в диапазоне от 0,6 до 4,5 г. Более предпочтительно, масса компонента 101 массы может находиться в диапазоне от 0,8 до 4 г. Более предпочтительно, масса компонента 101 массы может находиться в диапазоне от 1 до 3,6 г. Более предпочтительно, масса компонента 101 массы может находиться в диапазоне от 1,5 до 3 г. Более предпочтительно, масса компонента 101 массы может находиться в диапазоне от 2 до 2,5 г.
Неподвижный компонент 104 может относиться к носителю импедансного устройства 100 и может быть использован для переноса других компонентов импедансного устройства 100 (например, компонента 101 массы, упругого компонента 102 и демпфирующего компонента 103). В некоторых вариантах осуществления конструкция неподвижного компонента 104 может включать в себя, помимо прочего, пластинчатую конструкцию, конструкцию корпуса, блочную конструкцию, настольную конструкцию или тому подобное. Следует отметить, что неподвижный компонент 104 не ограничен вышеупомянутой конструкцией, и неподвижный компонент 104 может быть конструкцией любой формы, при условии, что это конструкция, способная нести другие компоненты (например, компонент 101 массы, упругий компонент 102 и демпфирующий компонент 103) импедансного устройства 100, и нет никаких дополнительных ограничений.
Упругий компонент 102 может быть использован для обеспечения определенной упругости для перемещения компонента 101 массы. Величина упругой силы упругого компонента 102 пропорциональна смещению или амплитуде перемещения компонента 101 массы. Например, упругий компонент 102 деформируется во время перемещения компонента массы, и упругая сила упругого компонента 102 связана с деформацией упругого компонента 102. Чем больше деформация, тем больше упругая сила, создаваемая упругим компонентом 102. Коэффициент упругости упругого компонента 102 может быть использован для представления эквивалентного коэффициента упругости вблизи области козелка головы человека. В некоторых вариантах осуществления коэффициент упругости упругого компонента 102 может быть задан таким, чтобы он был приблизительно равен эквивалентному коэффициенту упругости вблизи области козелка головы человека. В некоторых вариантах осуществления коэффициент упругости упругого компонента 102 может быть задан на основе твердости вблизи области козелка головы человека, возраста пользователя, давления при ношении вибрационного блока и типа клеток на месте. Конкретные причины заключаются в следующем: твердость разных частей головы человека различна, и эквивалентные коэффициенты упругости разных частей головы человека также различны. Например, лобная часть головы человека и сосцевидная часть за ухом являются сравнительно твердыми, а их эквивалентные коэффициенты упругости сравнительно велики. В качестве другого примера, часть височной кости перед ухом головы человека (то есть вблизи области козелка) мягче, чем часть лба и сосцевидная часть за ухом, и эквивалентный коэффициент упругости части височной кости сравнительно мал. Кроме того, модуль Юнга эластина и коллагена в разных клетках головы человека различен (например, модуль Юнга эластина E≈0,3 МПа, модуль Юнга коллагена E=100~1000 МПа). Следовательно, разные клетки по-разному влияют на эквивалентные коэффициенты упругости различных областей головы человека. Кроме того, одна и та же часть тела одного и того же человека имеет разные эквивалентные коэффициенты упругости в разном возрасте. Например, после старения человеческого тела, из-за уменьшения количества подкожной жидкости, эквивалентный коэффициент упругости может соответственно увеличиваться. В некоторых вариантах осуществления эквивалентный коэффициент упругости кожи головы человека также связан с давлением между вибрационным блоком и кожей головы, когда пользователь носит вибрационный блок. Например, когда пользователь носит устройство, содержащее вибрационный блок (например, слуховое устройство, аудиоустройство и т.д.), то после воздействия давления между устройством и кожей головы человека, устройство сдавливает подкожные клетки человеческого тела, что может повлиять на количество подкожной жидкости, в соответствии с устройством. Чем больше давление, тем меньше количество подкожной жидкости, соответствующее устройству, и тем больше соответствующий эквивалентный коэффициент упругости. Для имитации характеристики, согласно которой эквивалентный коэффициент упругости кожи головы человека изменяется при давлении, в некоторых вариантах осуществления коэффициент упругости упругого компонента 102 может быть установлен так, чтобы изменяться в соответствии с перемещением или амплитудой перемещения компонента 101 массы. Например, по мере увеличения амплитуды перемещения компонента 101 массы коэффициент упругости упругого компонента 102 соответственно увеличивается. Для того чтобы коэффициент упругости упругого компонента 102 был равен или приблизительно равен эквивалентному коэффициенту упругости вблизи области козелка головы, в некоторых вариантах осуществления коэффициент упругости упругого компонента 102 может находиться в диапазоне от 600 Н/м до 5000 Н/м. Предпочтительно, коэффициент упругости упругого компонента 102 может находиться в диапазоне от 700 Н/м до 4500 Н/м. Более предпочтительно, коэффициент упругости упругого компонента 102 может находиться в диапазоне от 800 Н/м до 4000 Н/м. Предпочтительно, коэффициент упругости упругого компонента 102 может находиться в диапазоне от 850 Н/м до 3500 Н/м. Предпочтительно, коэффициент упругости упругого компонента 102 может находиться в диапазоне от 900 Н/м до 1700 Н/м. Предпочтительно, коэффициент упругости упругого компонента 102 может находиться в диапазоне от 1000 Н/м до 1500 Н/м. Предпочтительно, коэффициент упругости упругого компонента 102 может находиться в диапазоне от 1100 Н/м до 1400 Н/м. В некоторых вариантах осуществления упругий компонент 102 может включать в себя, помимо прочего, пружину, упругую мягкую резину или силикон, пластик с упругой структурой, металл с упругой структурой и т.д. или другие упругие формы (например, воздушную подушку). В некоторых вариантах осуществления пружина включает в себя, помимо прочего, одну или несколько из следующих пружин: пружину сжатия, пружину растяжения, торсионную пружину, спиральную пружину или плоскую пружину. В некоторых вариантах упругий компонент 102 также может представлять собой текучую среду (например, газ, жидкость или комбинацию газа и жидкости и т.д.). Когда на текучую среду воздействует внешняя сила (например, давление на текучую среду, когда компонент 101 массы вибрирует), текучая среда создает определенное сопротивление движению (т.е. вязкость) компонента 101 массы, чтобы обеспечить некоторую гибкость для перемещения компонента 101 массы.
Демпфирующий компонент 103 может быть использован для обеспечения демпфирования перемещения компонента 101 массы. Демпфирующий компонент 103 может представлять эквивалентное демпфирование человеческого тела. Для того чтобы демпфирование, обеспечиваемое демпфирующим компонентом 103, было равным или приблизительно равным эквивалентному демпфированию вблизи области козелка головы, в некоторых вариантах осуществления коэффициент демпфирования демпфирующего компонента 103 может находиться в диапазоне от 1 до 4. Более предпочтительно, коэффициент демпфирования демпфирующего компонента 103 может составлять от 1 до 3. Более предпочтительно, коэффициент демпфирования демпфирующего компонента 103 может находиться в диапазоне от 1 до 2. В некоторых вариантах осуществления демпфирующий компонент 103 может включать в себя, помимо прочего, один или несколько из следующего: пружинный демпфер, гидравлический демпфер фрикционный демпфер, демпфер пульсаций, ротационный демпфер, вязкий демпфер, воздушный демпфер, демпферный шарнир или демпфирующие направляющих и т.п. В некоторых вариантах осуществления демпфирующий компонент 103 может быть реализован с использованием свойств определенной среды (например, жидкости с определенной вязкостью, такой как магнитная жидкость).
В некоторых вариантах осуществления компонент 101 массы или упругий компонент 102 или демпфирующий компонент 103 может одновременно обеспечивать эффект массы, упругий эффект или демпфирующий эффект. В некоторых вариантах осуществления компонент 101 массы и упругий компонент 102 могут быть выполнены в виде одного или того же компонента. Например, упругий силиконовый блок может служить в качестве компонента 101 массы и упругого компонента 102 одновременно. В некоторых вариантах осуществления компонент 101 массы и демпфирующий компонент 103 могут быть выполнены в виде одного или того же компонента. Например, неподвижный компонент 104 имеет отверстие той же формы, что и компонент 101 массы. Когда боковая стенка компонента 101 массы находится в контакте с внутренней стенкой неподвижного компонента 104, сила трения между компонентом 101 массы и неподвижным компонентом 104 может быть использована в качестве демпфирования импедансного устройства 100. В некоторых вариантах осуществления упругий компонент 102 и демпфирующий компонент 103 могут быть выполнены в виде одного или того же компонента. Например, пружина, заполненная или обернутая пеной, выступает в качестве как упругого компонента 102, так и демпфирующего компонента 103.
Следует отметить, что приведенное выше описание импедансного устройства 100 предназначено только для примерной иллюстрации и не ограничивает объем настоящего изобретения. Для специалистов в данной области техники в импедансное устройство 100 могут быть внесены различные модификации и изменения в соответствии с настоящим описанием, такие как исключение упругого компонента 102 или демпфирующего компонента 103, и эти модификации и изменения все еще находятся в рамках настоящего описания.
На фиг. 2 показана схематическая структурная диаграмма импедансного устройства 200 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 2, импедансное устройство 200 может включать в себя компонент 201 массы, упругий компонент 202, демпфирующий компонент 203 и неподвижный компонент 204. Неподвижный компонент 204 может быть использован в качестве опорного носителя для других компонентов (например, компонента 201 массы, упругого компонента 202 и демпфирующего компонента 203) импедансного устройства 200. Неподвижный компонент 204 может представлять собой пластинчатую конструкцию, блочной конструкцию, конструкцию корпуса или другие правильные и неправильные формы. В некоторых вариантах осуществления неподвижный компонент 204 может включать в себя неподвижный рычаг, который может быть частичной структурой или составной структурой неподвижного компонента 204. Например, если неподвижный компонент 204 представляет собой пластинчатую конструкцию, то пластинчатая конструкция может быть неподвижным рычагом. В качестве другого примера, если неподвижный компонент 204 представляет собой конструкцию корпуса, то неподвижный рычаг может быть боковой стенкой конструкции корпуса. В некоторых вариантах осуществления компонент 201 массы расположен напротив неподвижного рычага, одна сторона компонента 201 массы обращена к неподвижному рычагу, а другая сторона компонента 201 массы обращена от неподвижного рычага. Упругий компонент 202 может быть расположен между компонентом 201 массы и неподвижным рычагом для поддержки компонента 201 массы, так что компонент 201 массы перемещается относительно неподвижного компонента под действием внешнего воздействия (например, вибрации вибрационного блока). В некоторых вариантах осуществления упругий компонент 202 может представлять собой столбчатую конструкцию с двумя концами, причем первый конец упругого компонента 202 соединен с компонентом 210 массы, а второй конец упругого компонента 202 соединен с неподвижным рычагом. В некоторых вариантах осуществления демпфирующий компонент 203 может быть расположен между компонентом 201 массы и неподвижным рычагом, при этом первый конец демпфирующего компонента 203 соединен с компонентом 201 массы, а второй конец демпфирующего компонента 203 соединен с неподвижным рычагом. В некоторых вариантах осуществления демпфирующий компонент 203 может включать в себя по меньшей мере одно из следующего: пружинный демпфер, гидравлический демпфер фрикционный демпфер, демпфер пульсаций, ротационный демпфер, вязкий демпфер, воздушный демпфер, демпферный шарнир, демпфирующие направляющие и т.д.
Следует отметить, что приведенное выше описание импедансного устройства 200 предназначено только для примерной иллюстрации, и количество компонентов массы, упругих компонентов и демпфирующих компонентов импедансного устройства 200 не ограничивается указанным выше, но также их может быть несколько. Например, упругих компонентов может быть несколько, и несколько упругих компонентов могут быть соединены последовательно друг с другом. Кроме того, путем регулировки количества упругих компонентов импедансного устройства 200 коэффициент упругости всего упругого компонента может находиться в диапазоне от 600 Н/м до 5000 Н/м, упомянутом выше.
На фиг. 3 показана схематическая структурная диаграмма импедансного устройства 300 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Общая структура импедансного устройства 300, показанного на фиг. 3, по существу такая же, как у импедансного устройства 200, показанного на фиг. 2, и разница заключается в том, что в импедансном устройстве 300, показанном на фиг. 3, сторона компонента 301 массы, удаленная от неподвижного компонента 304, имеет защитный слой 305. Защитный слой 305 может препятствовать непосредственному контакту компонента 301 массы с вибрационным блоком, тем самым предотвращая износ вибрационного блока. В некоторых вариантах осуществления защитный слой 305 может представлять собой металлический защитный слой, тканевый защитный слой, силиконовый защитный слой, защитный слой из мягкой резины и т.д. или любую их комбинацию. Кроме того, количество упругих компонентов 302 в импедансном устройстве 300, показанном на фиг. 3, отличается от количества упругих компонентов 202 в импедансном устройстве 200, показанном на фиг. 2. В некоторых вариантах осуществления количество упругих компонентов 302 может составлять два или более. Если упругие компоненты 302 включают в себя несколько упругих компонентов 302, то несколько упругих компонентов 302 могут быть расположены между компонентом 301 массы и неподвижным компонентом 304. В некоторых вариантах осуществления несколько упругих компонентов 302 могут быть упругими элементами с одинаковыми или различными характеристиками (например, длиной, коэффициентом упругости и т.д.). Если характеристики нескольких упругих компонентов 302 одинаковы, то несколько упругих компонентов 302 могут быть равномерно распределены вдоль боковой поверхности компонента 301 массы, обращенной к неподвижному компоненту 304. Если характеристики упругих компонентов 302 различны, например, длины упругих компонентов 302 различны, то два конца упругого компонента 302 с большей длиной соединены с неподвижным компонентом 304 и компонентом 301 массы соответственно, а упругие элементы с меньшей длиной могут быть объединены последовательно для образования одного упругого компонента 302, и два конца упругого компонента 302, образованного рядом из нескольких упругих элементов, соединены с неподвижным компонентом 304 и компонентом 301 массы соответственно. Следует отметить, что количество упругих компонентов 302 не ограничивается двумя, показанными на фиг. 3, и может также составлять три, четыре, пять или более пяти. Другие структуры и компоненты импедансного устройства 300 (например, демпфирующий компонент 303 и фиксированный компонент 304) являются такими же или аналогичными структурам импедансного устройства 200, показанного на фиг. 2. Для получения более подробной информации, пожалуйста, обратитесь к описанию фиг. 2, которое здесь повторять не будем.
В некоторых вариантах осуществления упругий компонент и демпфирующий компонент импедансного устройства могут быть выполнены в виде одного или того же компонента. Для получения более подробной информации, пожалуйста, обратитесь к фиг. 4 и соответствующему описанию ниже. На фиг. 4 показана схематическая структурная диаграмма импедансного устройства 400 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 4, упругий компонент 402 может включать в себя одну или несколько пружин, и пружины расположены между компонентом 401 массы и неподвижным компонентом 404 для соединения компонента 401 массы и неподвижного компонента 404. В некоторых вариантах осуществления внутри или вокруг пружины может быть расположено вещество с демпфирующими свойствами, и вещество с демпфирующими свойствами может обеспечивать демпфирование пружины, так что заполненная пружина может выступать в качестве как упругого компонента, так и демпфирующего компонента. В некоторых вариантах осуществления демпфирующий компонент 403 может представлять собой упругий материал, такой как пена, губка, резина, силикон и т.д. Другие структуры и компоненты импедансного устройства 400 (например, неподвижный компонент 404 и защитный слой 405) являются такими же или подобными некоторым структурам и компонентам импедансного устройства 300, описанного на фиг. 3. Для получения более подробной информации, пожалуйста, обратитесь к описанию фиг. 3, которое здесь повторять не будем.
На фиг. 5 показана схематическая структурная диаграмма импедансного устройства 500 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 5, импедансное устройство 500 может включать в себя компонент 501 массы, упругий компонент 502, демпфирующий компонент 503 и неподвижный компонент 504. В некоторых вариантах осуществления неподвижный компонент 504 может представлять собой конструкцию корпуса с одним открытым концом, и компонент 501 массы подвешен в отверстии конструкции корпуса через упругий компонент 502, так что компонент 501 массы может соединяться или контактировать с вибрационным блоком или вибрационным блоком через отверстие в неподвижном компоненте 504.
В некоторых вариантах осуществления неподвижный компонент 504 может включать в себя первую боковую стенку, вторую боковую стенку и третью боковую стенку, при этом между первой боковой стенкой и второй боковой стенкой имеется расстояние для образования отверстия в конструкции корпуса, а третья боковая стенка расположена напротив отверстия. Компонент 501 массы представляет собой столбчатую конструкцию, боковая стенка компонента 501 массы соединена с первой боковой стенкой и второй боковой стенкой неподвижного компонента 504 через упругий компонент 502, а сторона компонента 501 массы, обращенная к третьей боковой стенке, соединена с третьей боковой стенкой через демпфирующий компонент 503. В некоторых вариантах осуществления часть конструкции компонента 501 массы может выступать из отверстия неподвижного компонента 504, или вся конструкция компонента 501 массы находится ниже плоскости, в которой расположено отверстие, или сторона компонента 501 массы, обращенная от третьей боковой стенки, находится в той же плоскости, что и плоскость, в которой расположено отверстие. Следует отметить, что первая боковая стенка, вторая боковая стенка и третья боковая стенка неподвижного компонента 504 приведены здесь только для удобства описания неподвижного компонента 504. В некоторых вариантах осуществления первая боковая стенка и вторая боковая стенка могут быть разными боковыми стенками. Например, если неподвижный компонент 504 имеет кубическую структуру, то первая боковая стенка и вторая боковая стенка могут представлять собой две противоположных боковых стенки в кубической структуре. В некоторых вариантах осуществления первая боковая стенка и вторая боковая стенка могут быть одной и той же боковой стенкой. Например, если неподвижный компонент 504 имеет цилиндрическую конструкцию, то первая боковая стенка и вторая боковая стенка являются различными компонентами боковой стенки цилиндра. Кроме того, боковая стенка неподвижного компонента 504 не ограничена вышеупомянутой первой боковой стенкой и второй боковой стенкой и также может включать в себя другие боковые стенки, такие как четвертая боковая стенка, пятая боковая стенка и т.д., и боковая стенка компонента 501 массы может быть соединена с другими боковыми стенками через упругий компонент 502, или боковая стенка компонента 501 массы может не соединяться с другими боковыми стенками.
В некоторых вариантах осуществления упругий компонент 502 может включать в себя первый конец и второй конец. Первый конец упругого компонента 502 соединен с боковой стенкой компонента 501 массы, а второй конец упругого компонента 502 соединен с внутренней стенкой конструкции корпуса. В некоторых вариантах осуществления упругих компонентов 502 может быть несколько, и несколько упругих компонентов 502 могут быть распределены вдоль боковой стенки компонента 501 массы с интервалами.
Следует отметить, что импедансное устройство, показанное на фиг. 2-5, приведено только для примерного описания и не ограничивает объем настоящего изобретения. Для специалистов в данной области в импедансное устройство могут быть внесены различные модификации и изменения в соответствии с настоящим описанием, такие как изменение реализации компонента массы или изменение реализации упругого компонента, и эти модификации и изменения все еще находятся в пределах объема настоящего изобретения.
На фиг. 6 показана схематическая структурная диаграмма импедансного устройства 600 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 6, неподвижный компонент 604 может представлять собой конструкцию корпуса с одним открытым концом. Упругих компонентов 602 может быть несколько, и несколько упругих компонентов 602 распределены вдоль боковой стенки компонента 601 массы с интервалами.
В некоторых вариантах осуществления неподвижный компонент 604 может представлять собой цилиндрическую конструкцию корпуса с одним открытым концом. Конструкция корпуса имеет полость, и полость может вмещать в себя компонент 601 массы, упругий компонент 602 и демпфирующий компонент 603. Полость сообщается с отверстием, и верхняя часть компонента 601 массы может быть соединена или контактировать с вибрационным блоком через отверстие неподвижного компонента 604. В некоторых вариантах осуществления расстояние между боковой стенкой компонента 601 массы и внутренней стенкой неподвижного компонента 604 может быть или не быть везде одинаковым.
В некоторых вариантах осуществления демпфирующая часть 603 может быть расположена между компонентом 601 массы и нижней стенкой конструкции корпуса. В некоторых вариантах осуществления один конец демпфирующего компонента 603 соединен с одной стороной компонента 601 массы, а другой конец демпфирующего компонента 603 соединен с нижней стенкой конструкции корпуса. В некоторых вариантах осуществления демпфирующий компонент 603 может представлять собой демпфер, который поддерживают между нижней частью компонента 601 массы и нижней стенкой конструкции корпуса.
В некоторых вариантах осуществления первый конец упругого компонента 602 соединен с боковой стенкой компонента 601 массы, а второй конец упругого компонента 602 соединен с внутренней стенкой конструкции корпуса. В некоторых вариантах осуществления упругие силы нескольких упругих компонентов 602, действующие на компонент 601 массы или неподвижный компонент 604, могут быть равными или неравными. В некоторых вариантах осуществления упругий компонент 602 может включать в себя по меньшей мере одно из следующего: пружину сжатия, пружину растяжения, торсионную пружину, спиральную пружину, плоскую пружину и т.д.
Чтобы предотвратить попадание посторонних предметов в импедансное устройство 600 и их влияние на точность импедансного устройства 600, в некоторых вариантах осуществления импедансное устройство 600 может дополнительно включать в себя блокирующий компонент (не показан на фиг. 6), и блокирующий компонент может быть расположен между боковой стенкой компонента 601 массы и внутренней стенкой неподвижного компонента 604. Боковая стенка блокирующего компонента соединена с внутренней стенкой неподвижной стенки. В некоторых вариантах осуществления блокирующий компонент может включать в себя отверстие, соответствующее форме компонента 601 массы, и компонент 601 массы может быть расположен в отверстии блокирующего компонента 601. В некоторых вариантах осуществления размер отверстия может быть больше размера компонента массы, так что компонент 601 массы может вибрировать в отверстии блокирующего компонента. В некоторых вариантах осуществления форма блокирующего компонента адаптирована к форме пространства, образованного боковой стенкой компонента 601 массы и неподвижного компонента 604. Например, если неподвижный компонент 604 и компонент 601 массы оба являются цилиндрическими структурами, то блокирующий компонент может быть кольцевой структурой. В качестве другого примера, если неподвижный компонент 604 имеет цилиндрическую структуру, а компонент 601 массы имеет прямоугольную параллелепипедную структуру, то общая форма блокирующего компонента может представлять собой цилиндрическую структуру с прямоугольным отверстием. Следует отметить, что в некоторых вариантах осуществления компонент 601 массы также может быть соединен с блокирующим компонентом через упругий компонент 602.
В некоторых вариантах осуществления демпфирующей частью может быть любой объект, обладающий демпфирующими свойствами. На фиг. 7 показана схематическая структурная диаграмма импедансного устройства 700 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 7, демпфирующий компонент 703 расположен между нижней частью компонента 701 массы и нижней частью неподвижного компонента 704. Демпфирующим компонентом 703 может быть любой объект, который обладает демпфирующими характеристиками, например, пена или жидкость с определенной силой сила вязкого сопротивления (например, магнитная жидкость, жидкость) и т.д. Компонент 701 массы, упругий компонент 702 и неподвижный компонент 704 являются такими же или подобными некоторым структурам и компонентам импедансного устройства, показанного на фиг. 6. Для получения более подробной информации, пожалуйста, обратитесь к описанию фиг. 6, которое здесь повторять не будем.
Чтобы более четко описать распределение и специфическую структуру упругого компонента, упругий компонент теперь может быть дополнительно описан со ссылкой на фиг. 8 и фиг. 9. На фиг. 8 приведен вид сверху конструкции импедансного устройства 800 в соответствии с некоторыми вариантами осуществления настоящего изобретения.
Как показано на фиг. 8a, в некоторых вариантах осуществления упругий компонент 802a может включать в себя четыре пружины (например, по меньшей мере одну из следующего: пружину сжатия, пружину растяжения, торсионную пружину, спиральную пружину или плоскую пружину). Четыре упругих компонента 802a равномерно расположены вдоль боковой стенки компонента 801a массы. В некоторых вариантах осуществления расстояние между любым участком боковой стенки компонента 801a массы и внутренней стенкой неподвижного компонента 804a может быть одинаковым. Здесь, при использовании одного и того же упругого компонента 802a, сила упругости, создаваемая каждым упругим компонентом 802a, может поддерживаться одинаковой во время вибрации компонента 801a массы, так что каждый упругий компонент 802a может иметь одинаковый срок службы и повышать точность устройства измерения импеданса при испытании. Следует отметить, что количество упругих компонентов 802a не ограничено четырьмя, показанными на фиг. 8a, а также может составлять два, три, пять или более. Кроме того, несколько упругих компонентов 802a могут включать в себя различные типы пружин. Например, среди четырех пружин, показанных на фиг. 8а, две пружины, расположенные вертикально, являются пружинами сжатия, а две пружины, расположенные горизонтально, являются спиральными пружинами.
Как показано на фиг. 8b, в некоторых вариантах осуществления упругий компонент 802b может представлять собой дугообразную листовую пружину, и несколько упругих компонентов 802b равномерно расположены вдоль боковой стенки компонента 801b массы. Следует отметить, что форма листовой пружины не ограничена вышеупомянутой дугообразной формой, а также может иметь другие формы, например, прямую, треугольную, V-образную, Z-образную, спиральную или другие правильные и неправильные формы. Другие структуры и компоненты импедансного устройства 800 являются такими же или подобными некоторым структурам и компонентам импедансного устройства 600, описанного на фиг. 6. Для получения более подробной информации, пожалуйста, обратитесь к описанию фиг. 6, которое здесь повторять не будем.
На фиг. 9 приведен вид сверху конструкции импедансного устройства 800 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 9, упругий компонент 902 импедансного устройства 900 может представлять собой сетчатую структуру, и сетчатая структура может включать в себя несколько упругих элементов 9021 (например, пружин, пружинных пластин и т.д.) и несколько кольцевых структур 9022. Несколько упругих элементов 9021 распределены вдоль боковой стенки компонента 901 массы с интервалами, и несколько кольцевых структур 9022 распределены с интервалами вокруг компонента 901 массы, при этом несколько кольцевых структур 9022 соединены с упругим элементом 9021. Сетчатая конструкция подвешивает компонент 901 массы на отверстии неподвижного компонента 904. В некоторых вариантах осуществления внутреннее кольцо сетчатой структуры соединено с боковой стенкой компонента 901 массы, а внешнее кольцо сетчатой структуры соединено с внутренней стенкой неподвижного компонента 904. Внутреннее кольцо сетчатой структуры относится к стороне сетчатой структуры, близкой к боковой стенке компонента 901 массы, и, соответственно, внешнее кольцо сетчатой структуры относится к стороне сетчатой структуры, удаленной от боковой стенки компонента 901 массы. В некоторых вариантах осуществления форма упругого элемента 9021 в сетчатой структуре может быть правильной или неправильной, например, прямоугольной, треугольной, в виде дуги окружности, V-образной и т.д. Следует отметить, что кольцевая структура 9022 в сетчатой структуре также может иметь другие формы, например, любую форму, такую как квадрат, треугольник, пятиугольник и шестиугольник и т.д. Кроме того, количество кольцевых структур 9022 не ограничено двумя, показанными на фиг. 9, но также может составлять одну, три или более. Если кольцевых структур 9022 несколько, то формы кольцевых структур 9022 могут быть одинаковыми или разными. Другие структуры и компоненты импедансного устройства 900 являются такими же или подобными некоторым структурам и компонентам импедансного устройства 800, описанного на фиг. 8. Для получения более подробной информации, пожалуйста, обратитесь к описанию фиг. 8, которое здесь повторять не будем. Кроме того, частичные структуры в сетчатой структуре, показанной на фиг. 9 (например, упругий элемент 9021 и кольцевая структура 9022), также могут быть применены к импедансному устройству, показанному на фиг. 5-8.
В импедансных устройствах, показанных на фиг. 2-9, параметры компонента массы, упругого компонента и демпфирующего компонента могут быть указаны со ссылкой на фиг. 1 и связанное с ней описание. Например, параметры компонента массы, упругого компонента и демпфирующего компонента могут быть отрегулированы таким образом, что, если внешняя сила, приложенная к компоненту массы, составляет от 0,05 до 3,5 Н, механический импеданс импедансного устройства находится в диапазоне от 6 дБ до 50 дБ. Например, механический импеданс импедансного устройства под действием определенной внешней силы может быть изменен путем регулировки количества пружин и коэффициента упругости упругого компонента, количества и коэффициента демпфирования демпфирующих элементов демпфирующего компонента и массы компонента массы.
На фиг. 10 показана схематическая структурная диаграмма импедансного устройства 1000 в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 10, неподвижный компонент 1004 может представлять собой конструкцию корпуса с одним открытым концом. Герметичная полость 1007 может быть заключена между компонентом 1001 массы и конструкцией корпуса, и газ в герметичной полости 1007 может образовывать упругий компонент. В некоторых вариантах осуществления между боковой стенкой компонента 1001 массы и внутренней стенкой конструкции корпуса возникает сила трения. Сила трения может образовывать демпфирующий компонент, и сила трения между конструкцией корпуса и компонентом 1001 массы обеспечивает определенное демпфирование для перемещения компонента 1001 массы.
В импедансном устройстве 1000, показанном на фиг. 10, если внешняя сила, действующая на компонент 1001 массы, находится в диапазоне от 0,05 до 3,5 Н, то масса компонента 1001 массы, коэффициент трения между компонентом 1001 массы и конструкцией корпуса или давление газа, находящегося внутри герметичной полости 1007, можно отрегулировать таким образом, чтобы механический импеданс импедансного устройства 1000 находилось в пределах целевого диапазона (например, от 6 дБ до 50 дБ). В некоторых вариантах осуществления в герметичную полость 1007 также может быть добавлен упругий элемент (например, пружина) для соединения нижней стенки конструкции корпуса с компонентом 1001 массы для регулировки механического импеданса импедансного устройства 1000.
Следует отметить, что импедансные устройства, показанные на фиг. 6-10, приведены только для примерного описания и не ограничивает объем настоящего изобретения. Для специалистов в данной области техники в импедансное устройство могут быть внесены различные модификации и изменения в соответствии с настоящим описанием, такие как изменение формы компонента массы и неподвижного компонента или обертывание упругого компонента на боковой стенке компонента массы пеной и т.д. Эти модификации и изменения по-прежнему входят в объем данного руководства.
В некоторых вариантах осуществления импедансное устройство может быть использовано для моделирования механического импеданса вблизи области козелка головы. Механический импеданс вблизи области козелка головы относится к реакции на движение вблизи области козелка головы при возбуждении внешней силой. Реакция на движение может включать в себя по меньшей мере одно из следующего: реакцию по перемещению, реакцию по скорости, реакцию по ускорению и т.д. Для целей иллюстрации внешняя сила может представлять собой силу возбуждения, создаваемую вибрационным блоком, когда вибрационный блок вибрирует, а реакция на движение представляет собой реакцию по скорости. В некоторых вариантах осуществления механический импеданс вблизи области козелка головы может быть представлен как отношение силы возбуждения к величине реакции по скорости, выраженное следующим образом:
 , (1)
, (1)
где F обозначает силу возбуждения, создаваемую вибрационным блоком, v обозначает реакцию по скорости, а Z обозначает механический импеданс вблизи области козелка головы. Чем больше механический импеданс в области козелка головы, тем меньше величина реакции по скорости.
На фиг. 11 приведена диаграмма модели аналоговой схемы механического импеданса импедансного устройства в соответствии с некоторыми вариантами осуществления настоящего изобретения. В модели схемы механического импеданса аналогом силы F возбуждения может быть напряжение, аналогом скорости v может быть ток, аналогом инерции m (обеспечиваемая компонентом массы) может быть индуктивность, аналогом упругой деформации c (c=1/k, k - коэффициент упругости, обеспечиваемый упругим компонентом) может быть конденсатор, а аналогом демпфирования r (обеспечиваемого демпфирующим компонентом) может быть резистор, таким образом, получается аналоговая схема модели механического импеданса импедансного устройства. Как показано на фиг. 11, модель аналоговой схемы представляет собой последовательную цепь из катушки индуктивности, конденсатора и резистора. Таким образом, механический импеданс Z выражается как:
 , (2)
, (2)
где m - инерция, k - коэффициент упругости, r - демпфирование, а ω - угловая скорость вибрации вибрационного блока. Механический импеданс является комплексным числом и может быть записано в виде действительной части с мнимой частью. Кроме того, частотная характеристика величины механического импеданса может быть выражена как:
 , (3)
, (3)
где опорное значение 0 дБ представляет 1 В с/м.
В сочетании с приведенными выше формулами (1), (2) и (3) может быть известно, что импедансное устройство может быть настроено путем регулировки массы импедансного устройства, коэффициента упругости упругого компонента или демпфирования демпфирующего компонента. Таким образом, механический импеданс, обеспечиваемый импедансным устройством, приблизительно соответствует механическому импедансу вблизи области козелка головы. Кривая частотной характеристики механического импеданса вблизи области козелка головы имеет впадину в определенном диапазоне частот (например, от 50 Гц до 500 Гц), то есть механический импеданс области козелка головы имеет минимальное значение (также известное как значение впадины) в определенном диапазоне частот. Кроме того, когда частота меньше определенного диапазона частот, механический импеданс вблизи области козелка головы уменьшается по мере увеличения частоты, а когда частота превышает определенный диапазон частот, механический импеданс вблизи области козелка головы увеличивается по мере увеличения частоты. В некоторых вариантах осуществления конкретная частота может не ограничиваться вышеупомянутым диапазоном 50 Гц-500 Гц. В некоторых вариантах осуществления конкретная частота также может представлять собой другие частоты, такие как частоты в диапазоне 60 Гц-400 Гц, в диапазоне 70 Гц-300 Гц или в диапазоне 80 Гц-200 Гц, или любое значение частоты в диапазоне.
В некоторых вариантах осуществления демпфирование импедансного устройства может быть отрегулировано таким образом, чтобы значение механического импеданса, обеспечиваемое импедансным устройством, соответствовало или приблизительно соответствовало значению механического импеданса вблизи области козелка головы. В некоторых вариантах осуществления коэффициент демпфирования демпфирующего компонента может быть отрегулирован так, чтобы он находился в диапазоне от 1 до 4, так что значение механического импеданса импедансного устройства находится в диапазоне от 0 дБ до 15 дБ. Предпочтительно, коэффициент демпфирования демпфирующего компонента может быть отрегулирован так, чтобы он находилося в диапазоне от 1,5 до 3,9, так что значение механического импеданса импедансного устройства находится в диапазоне от 2 дБ до 13 дБ. Более предпочтительно, коэффициент демпфирования демпфирующего компонента может быть отрегулирован так, чтобы он находился в диапазоне от 2 до 3,7, так что значение механического импеданса импедансного устройства находится в диапазоне от 3 дБ до 12 дБ. Более предпочтительно, коэффициент демпфирования демпфирующего компонента может быть отрегулирован так, чтобы он находился в диапазоне от 2,4 до 3,2, так что значение механического импеданса импедансного устройства находится в диапазоне от 6 дБ до 10 дБ.
В некоторых вариантах осуществления масса компонента массы и коэффициент упругости упругого компонента могут быть отрегулированы таким образом, чтобы частота, соответствующая значению впадины, могла находиться в пределах определенного частотного диапазона. В некоторых вариантах осуществления масса компонента массы может быть отрегулирована так, чтобы она находилась в диапазоне от 0,5 до 5 г, а коэффициент упругости упругого компонента может быть отрегулирован так, чтобы он находился в диапазоне от 600 до 5000 Н/м, так что значение впадины импедансного устройство может находиться в диапазоне от 50 Гц до 500 Гц. Предпочтительно, масса компонента массы может быть отрегулирована так, чтобы она находилась в диапазоне от 0,8 до 4,5 г, а коэффициент упругости упругого компонента может быть отрегулирован так, чтобы он находился в диапазоне от 700 до 3500 Н/м, так что значение впадины импедансного устройство может находиться в диапазоне от 60 Гц до 320 Гц. Более предпочтительно, масса компонента массы может быть отрегулирована так, чтобы она находилась в диапазоне от 1 до 3,6 г, а коэффициент упругости упругого компонента может быть отрегулирован так, чтобы он находился в диапазоне от 900 до 1700 Н/м, так что значение впадины импедансного устройство может находиться в диапазоне от 80 Гц до 200 Гц.
На фиг. 12 показана принципиальная схема системы для моделирования воздействия головы на вибрацию вибрационного блока в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 12, система 1400 включает в себя вибрационный блок 1410, импедансное устройство 1420, коннектор 1430 и датчик 1440.
В некоторых вариантах осуществления вибрационный блок 1410 может быть выполнен с возможностью подачи вибрационного сигнала. В некоторых вариантах осуществления вибрационный блок 1410 может преобразовывать сигнал, содержащий звуковую информацию, в вибрационный сигнал. В некоторых вариантах осуществления звуковая информация может включать в себя видеофайл, аудиофайл с определенным форматом данных или данные или файл, которые могут быть преобразованы в звук с помощью определенного подхода. Сигнал, содержащий звуковую информацию, может исходить от запоминающего компонента, который взаимодействует с вибрационным блоком 1410 или соединен с ним. В некоторых вариантах осуществления сигнал, содержащий звуковую информацию, может включать в себя электрический сигнал, оптический сигнал, магнитный сигнал, механический сигнал и т.д. или любую их комбинацию. В некоторых вариантах осуществления вибрационный блок 1410 может принимать сигнал, содержащий звуковую информацию, множеством различных способов. Способы получения сигнала включают в себя, помимо прочего, проводным или беспроводным получением, и могут также включать в себя получение в реальном времени или отложенное получение. Например, вибрационный блок 1410 может принимать электрический сигнал, содержащий звуковую информацию, проводным или беспроводным способом, или может непосредственно получать данные с носителя для формирования сигнала. В некоторых вариантах осуществления вибрационный блок 1410 может осуществлять преобразование сигнала, содержащего звуковую информацию, в механическую вибрацию, и процесс преобразования может включать в себя сосуществование и преобразование нескольких различных типов энергии. Например, электрический сигнал может быть непосредственно преобразован в механическую вибрацию с помощью преобразовательного устройства для создания звука. Например, звуковая информация может содержаться в оптическом сигнале, и процесс преобразования оптического сигнала в вибрационный сигнал может быть реализован устройством преобразования. Другие виды энергии, которые могут сосуществовать и могут быть преобразованы во время работы устройства преобразования, могут включать в себя тепловую энергию, энергию магнитного поля и т.д. В некоторых вариантах осуществления способ преобразования энергии устройства преобразования может включать в себя подвижную катушку, электростатический тип, пьезоэлектрический тип, звукосниматель с подвижным железным наконечником, пневматический тип, электромагнитный тип и т.д. или любую их комбинацию.
В некоторых вариантах осуществления импедансное устройство 1420 может контактировать с вибрационным блоком 1410 и обеспечивать механический импеданс вибрационному блоку 1410. В некоторых вариантах осуществления существует определенное давление между импедансным устройством 1420 и вибрационным блоком 1410. Механический импеданс, обеспечиваемый импедансным устройством 1420, может моделировать сопротивление головы относительно вибрационного блока 1410 во время фактического использования, и состояние вибрации вибрационного блока 1410 с механическим импедансом согласуется или по существу согласуется с характеристикой вибрации, когда его фактически используют на голове, так что чтобы позволить системе моделировать влияние механического импеданса головы на состояние вибрации вибрационного блока 1410, когда вибрационный блок 1410 соединяют с головой, и он вибрирует. Для получения информации о конкретном содержании импедансного устройства, пожалуйста, обратитесь к соответствующим описаниям и описаниям на фиг. 1-10, которые здесь повторяться не будут.
В некоторых вариантах осуществления коннектор 1430 может быть выполнен с возможностью соединения вибрационного блока 1410 с импедансным устройством 1420. В некоторых вариантах осуществления коннектор 1430 может обеспечивать давление от 0,05 до 3,5 Н между вибрационным блоком 1410 и импедансным устройством 1420. Предпочтительно, коннектор 1430 может обеспечивать давление между вибрационным блоком 1410 и устройством 1420 в диапазоне от 0,1 до 3 Н. Предпочтительно, коннектор 1430 может обеспечивать давление между вибрационным блоком 1410 и устройством 1420 в диапазоне от 0,3 до 2,5 Н. Предпочтительно, коннектор 1430 может обеспечивать давление между вибрационным блоком 1410 и устройством 1420 в диапазоне от 0,5 до 2 Н. Предпочтительно, коннектор 1430 может обеспечивать давление между вибрационным блоком 1410 и устройством 1420 в диапазоне от 0,8 до 1,8 Н. Предпочтительно, коннектор 1430 может обеспечивать давление между вибрационным блоком 1410 и устройством 1420 в диапазоне от 1 до 1,5 Н. В некоторых вариантах осуществления коннектор 1430 может быть соединен с вибрационным блоком 1410 и может прикладывать давление к вибрационному блоку 1410, так что вибрационный блок 1410 может быть соединен с импедансным устройством 1420. В некоторых вариантах осуществления коннектор 1430 может быть соединен с вибрационным блоком 1410 и закреплен в контакте с другими неподвижными конструкциями. Например, коннектор 1430 может представлять собой коннектор, который может соединять вибрационный блок 1410 с другими неподвижными конструкциями, а другие неподвижные конструкции включают в себя, помимо прочего, модели головы или приспособления и т.д. В некоторых вариантах осуществления коннектор 1430 может быть выполнен как единое целое с вибрационным блоком 1410 и закреплен в контакте с другими неподвижными конструкциями. Например, коннектор 1430 может представлять собой заушник, выполненный как единое целое для головного телефона, конструкцию для удержания на ухе, выполненную как единое целое для слуховых аппаратов, конструкцию в виде оправы очков, выполненную как единое целое для аудиоочков, и т.д. В некоторых вариантах осуществления материал коннектора 1430 может включать в себя, помимо прочего, пластик и металл с определенной твердостью и формой, а также силикон и ткань с определенной упругостью.
В некоторых вариантах осуществления, когда коннектор 1430 обеспечивает давление между вибрационным блоком 1410 и импедансным устройством 1420 в диапазоне от 0,05 до 3,5 Н, импедансное устройство 1420 обеспечивает механический импеданс вибрационному блоку 1410 в диапазоне от 6 дБ до 50 дБ. Механический импеданс в диапазоне от 6 дБ до 50 дБ имитирует фактическое сопротивление, оказываемое вибрационному блоку 1410 вблизи области козелка при фактическом использовании, так что, когда вибрационный блок 1410 и импедансное устройство 1420 соединены для вибрации, влияние механического импеданса на вибрацию вибрационного блока 1410 может имитировать влияние фактического сопротивления головы на вибрацию вибрационного блока 1410, когда вибрационный блок 1410 соединен с головой для вибрации, тем самым облегчая разработку и производство сопутствующих продуктов для тестирования или калибровки.
Чтобы гарантировать, что вибрационный блок 1410 и импедансное устройство 1420 полностью установлены, в некоторых вариантах осуществления площадь области соединения между импедансным устройством 1420 и вибрационным блоком 1410 может находиться в диапазоне от 0,25 см2 до 4 см2. В некоторых вариантах осуществления площадь области соединения между импедансным устройством 1420 и вибрационным блоком 1410 может находиться в диапазоне от 0,5 см2 до 3,8 см2. В некоторых вариантах осуществления площадь области соединения между импедансным устройством 1420 и вибрационным блоком 1410 может находиться в диапазоне от 1 см2 до 3,6 см2. В некоторых вариантах осуществления площадь области соединения между импедансным устройством 1420 и вибрационным блоком 1410 может находиться в диапазоне от 1,5 см2 до 3,4 см2. В некоторых вариантах осуществления площадь области соединения между импедансным устройством 1420 и вибрационным блоком 1410 может находиться в диапазоне от 2 см2 до 3,2 см2. Следует отметить, что площадь области соединения между импедансным устройством 1420 и вибрационным блоком 1410 не ограничена вышеупомянутым диапазоном, а также может находиться в других диапазонах. Например, площадь области соединения составляет более 4 см2 или менее 0,25 см2, и конкретная площадь области соединения может быть адаптивно отрегулирована в соответствии с размером вибрационного блока 1410.
В некоторых вариантах осуществления датчик 1440 может быть выполнен с возможностью сбора информации о параметрах во время процесса вибрации вибрационного блока 1410. В некоторых вариантах осуществления датчик 1440 также может быть выполнен с возможностью сбора информации о параметрах во время процесса вибрации вибрационного блока 1410, когда вибрационный блок 1410 соединен с импедансным устройством 1420. В некоторых вариантах осуществления информация о параметрах во время процесса вибрации может быть использована для характеристики вибрационного воздействия вибрационного блока 1410. В некоторых вариантах осуществления информация о параметрах во время процесса вибрации может включать в себя данные о характеристиках вибрации, и данные о характеристиках вибрации могут включать в себя, помимо прочего, по меньшей мере одно из следующего: вибросмещение, виброскорость, виброускорение и т.д. В некоторых вариантах осуществления информация о параметрах во время процесса вибрации может включать в себя генерируемые вибрацией данные акустических характеристик, передаваемых по воздуху, и данные акустических характеристик, передаваемых по воздуху, могут включать в себя, помимо прочего, одно или несколько из следующего: уровень звукового давления, частотную характеристику и т.д. воздушной проводимости звука. В некоторых вариантах осуществления датчик 1440 может быть расположен в вибрационном блоке 1410, например, датчик 1440 может быть установлен непосредственно на поверхности или внутри вибрационного блока 1410. В некоторых вариантах осуществления датчик 1440 может быть косвенно соединен с вибрационным блоком 1410, например, датчик 1440 может быть установлен на поверхности или внутри импедансного устройства 1420, например, на компоненте массы импедансного устройства 1420. В некоторых вариантах осуществления датчик 1440 также может быть расположен на коннекторе 1430. В некоторых вариантах осуществления тип и/или форма датчика 1440 могут быть не ограниченными, например, датчик 1440 может быть бесконтактным лазерным датчиком (таким как виброметр, доплеровский тестер), который может регистрировать вибрационное ускорение (скорость или перемещение). Датчик 1440 также может быть контактным датчиком, таким как датчик ускорения, датчик костной проводимости, пьезоэлектрический датчик, датчик MEMS и т.д.
В некоторых вариантах осуществления система также может включать в себя тестовую систему, и тестовая система может быть подключена по меньшей мере к одному датчику 1440 для сбора и/или обработки детектирующих сигналов по меньшей мере одного датчика 1440. В некоторых вариантах осуществления тестовая система может быть соединена с вибрационным блоком 1410 для подачи управляющего сигнала на вибрационный блок 1410, чтобы приводить в действие вибрационный блок 1410 для генерации сигнала механической вибрации. В некоторых вариантах осуществления тестовая система соединяет по меньшей мере один датчик 1440 и вибрационный блок 1410, приводит в действие вибрационный блок 1410 для генерации сигналов механической вибрации и собирает и обрабатывает сигналы, собранные по меньшей мере одним датчиком 1440.
Следует понимать, что система для моделирования воздействия головы на вибрацию вибрационного блока 1410, показанная на фиг. 12, предназначена только для иллюстрации и описания и не ограничивает объем настоящего изобретения. Для специалистов в данной области в систему для моделирования воздействия головы на вибрацию вибрационного блока 1410 могут быть внесены различные модификации и изменения в соответствии с настоящим описанием. Например, предусмотрено множество различных типов или форм датчиков 1440 для мониторинга все более и более полной информации о параметрах. В качестве другого примера, коннектор 1430 убирают, и вибрационный блок 1410 и импедансное устройство 1420 соединяют непосредственно посредством магнитного притяжения или сцепления. Эти модификации и изменения все еще находятся в рамках объема настоящего изобретения.
На фиг. 13 показана схема моделируемого положения области соединения между вибрационным блоком и головой в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 13, когда вибрационный блок 110 соединен с головой, вибрационный блок 110 соединен с передней стороной козелка человека (называемой областью вблизи козелка) вдоль поперечного сечения, если смотреть сверху головы. В некоторых вариантах осуществления вибрационный блок 110 пропускает барабанную перепонку и передает вибрационный сигнал непосредственно на косточки среднего уха и улитку внутреннего уха, главным образом, путем вибрации височной кости перед козелком. В некоторых случаях вибрация вибрационного блока 110 может также вызывать вибрацию окружающего воздуха, чтобы генерировать часть звука воздушной проводимости, и часть звука воздушной проводимости передают на барабанную перепонку через наружный слуховой проход. Импедансные устройства, показанные в некоторых вариантах осуществления настоящего изобретения, используют для моделирования фактического сопротивления, генерируемого вблизи области козелка, к которой присоединен вибрационный блок 110, а система для моделирования воздействия головы на вибрацию вибрационного блока 110 используют для моделирования вибрационного воздействия фактического сопротивления вблизи области козелка на вибрационный блок 110, когда вибрационный блок 110 вибрирует вблизи области козелка. Соединение между вибрационным блоком 110 и областью козелка может соответствовать сценариям применения большинства наушников с костной проводимостью, а также может соответствовать сценариям применения некоторых слуховых аппаратов. Следовательно, система для моделирования воздействия головы на вибрацию вибрационного блока 110 может объективно измерять вибрационное воздействие вибрационного блока 110 и моделировать и характеризовать фактическую частотную характеристику вибрационного блока 110, когда вибрационный блок 110 вибрирует вблизи области козелка, что может быть использовано в качестве испытательного или калибровочного устройства для исследований, разработок и производства.
Чтобы облегчить регулировку давления соединения между вибрационным блоком 110 и импедансным устройством, обеспечиваемым коннектором, коннектор может представлять собой независимую конструкцию по отношению к импедансному устройству. На фиг. 14 показана схематическая структурная диаграмма системы для моделирования воздействия головы на вибрацию вибрационного блока в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 14, коннектор может включать в себя опорный стержень 122 и фиксирующий элемент 123.
В некоторых вариантах осуществления фиксирующий элемент 123 может включать в себя первую концевую часть и вторую концевую часть. Первая концевая часть фиксирующего элемента 123 соединена с опорным стержнем 122, а вторая концевая часть фиксирующего элемента 123 соединена с вибрационным узлом 110. В некоторых вариантах осуществления опорный стержень 122 используют для поддержки фиксирующего элемента 123. В некоторых вариантах осуществления опорный стержень 122 может быть расположен вертикально, а фиксирующий элемент 123 может быть расположен горизонтально. В некоторых вариантах осуществления усилие фиксирующего элемента 123 по отношению к вибрационному блоку 110 может создавать давление между вибрационным блоком 110 для соединения с импедансным устройством. В некоторых вариантах осуществления путем точной настройки расстояния между опорным стержнем 122 и демпфирующим устройством можно регулировать величину давления для соединения между вибрационный блоком 110 и импедансным устройством, обеспечиваемым коннектором. В некоторых вариантах осуществления путем точной настройки длины фиксирующего элемента 123 можно регулировать величину давления, обеспечиваемого для соединения между вибрационный блоком 110 и импедансным устройством, обеспечиваемого коннектором. В некоторых вариантах осуществления первая концевая часть фиксирующего элемента 123 может быть соединена для перемещения вдоль опорного стержня 122, что может упростить регулировку высоты фиксирующего элемента 123, так что вибрационный блок 110 может соответствовать высоте импедансного устройства.
В некоторых вариантах осуществления коннектор также может включать в себя основание 121. Опорный стержень 122 может быть соединен с основанием 121, а основание 121 используют для стабилизации общей конструкции коннектора. В некоторых вариантах осуществления первая концевая часть опорного стержня 122 соединена с основанием 121, а вторая концевая часть опорного стержня 122 соединена с первым концом фиксирующего элемента 123.
В некоторых вариантах осуществления система также может включать в себя модель 140 головы. Модель 140 головы используют для имитации реальной головы, и коннектор располагают относительно модели 140 головы. В некоторых вариантах осуществления импедансное устройство расположено вблизи области козелка модели 140 головы, и вибрационный блок 110, соединенный с коннектором, соединяют с импедансным устройством под давлением от коннектора. В некоторых вариантах осуществления импедансное устройство может быть размещено на поверхности модели 140 головы. В некоторых вариантах осуществления импедансное устройство может быть встроено в модель 140 головы.
В некоторых вариантах осуществления датчик может быть расположен в любом месте системы, где можно отслеживать информацию о параметрах во время процесса вибрации вибрационного блока 110. На фиг. 15 показана схематическая диаграмма распределения датчиков в соответствии с некоторыми вариантами осуществления настоящего изобретения.
Как показано на фиг. 15(а), в некоторых вариантах осуществления коннектор 120 может соединять вибрационный блок 110 с импедансным устройством (не показано на чертеже), а датчик 151 может быть размещен внутри или на поверхности импедансного устройства. Датчик 151 получает информацию о параметрах в процессе вибрации вибрационного блока 110 путем сбора информации о параметрах импедансного устройства, вибрирующего от вибрации вибрационного блока 110. В некоторых вариантах осуществления датчик 151 установлен на компоненте массы импедансного устройства. Компонент массы контактирует с вибрационным блоком 110, вибрационный блок 110 заставляет компонент массы вибрировать, и компонент массы непосредственно реагирует на частоту вибрации вибрационного блока 110. Датчик 151 может получать информацию о параметрах во время процесса вибрации вибрационного блока 110 путем получения информации о параметрах во время процесса вибрации компонента массы.
Как показано на фиг. 15(b), в некоторых вариантах осуществления коннектор 120 может соединять вибрационный блок 110 с импедансным устройством (не показано на чертеже), а датчик 152 может быть размещен независимо относительно импедансного устройства, вибрационного блока 110 и коннектора 120. Например, датчик 152 может быть интегрирован в главный контроллер системы, и датчик 152 может получать информацию о параметрах во время процесса вибрации путем сбора данных акустических характеристик воздушной проводимости, генерируемых вибрацией вибрационного блока 110. В качестве другого примера датчик 152 может представлять собой лазерный измеритель скорости для измерения скорости/ускорения поверхности вибрационного блока или компонента массы.
Как показано на фиг. 15(c), в некоторых вариантах осуществления коннектор 120 может соединять вибрационный блок 110 с импедансным устройством (не показано на чертеже), а датчик 153 может быть размещен внутри или на поверхности вибрационного блока 110. Датчик 153 может непосредственно собирать информацию о параметрах во время процесса вибрации вибрационного блока 110. В некоторых вариантах осуществления датчик 153 может быть встроен в устройство, включающее в себя вибрационный блок 110, и датчик может быть использован для сбора информации о параметрах во время процесса вибрации вибрационного блока 110 для отладки и калибровки гарнитуры. Кроме того, датчик также может быть использован для определения того, полностью ли надета гарнитура, путем мониторинга частотной характеристики, например, полностью ли она надета на лицо.
Следует отметить, что схемы системы, показанные на фиг. 14 и 15, приведены только для примерного описания и не ограничивает объем настоящего изобретения. Для специалистов в данной области в соответствии с настоящим описанием в систему для моделирования воздействия головы на вибрацию вибрационного блока 110 могут быть внесены различные модификации и изменения. Например, основание может отсутствовать. В качестве другого примера изменена конкретная конструкция коннектора, и эти модификации и изменения все еще находятся в пределах объема настоящего изобретения. Структуры и компоненты вибрационного блока 110 и импедансного устройства, показанные на фиг. 14 и фиг. 15, являются такими же или подобными структурам и компонентам вибрационного блока и импедансного устройства, показанных на фиг. 12 и фиг. 1-10, и для получения более подробной информации, пожалуйста, обратитесь к их описанию. В некоторых вариантах осуществления, чтобы дополнительно имитировать подгонку устройства и головы через коннектор во время фактического использования, коннектор может быть непосредственно приспособлен к голове. На фиг. 16-18 показаны схематические структурные диаграммы установки коннектора и модели головы в соответствии с некоторыми вариантами осуществления настоящего изобретения.
В некоторых вариантах осуществления, как показано на фиг. 16, коннектор может представлять собой лентообразную конструкцию 124, и лентообразная конструкция 124 окружает модель 140 головы и закрепляет вибрационный блок 110 на импедансном устройстве. В некоторых вариантах осуществления лентообразная конструкция 124 может быть реализована в варианте I. Лентообразная конструкция 124 обходит затылок, и две стороны соответственно соединены с вибрационными блоками 110, расположенными у левого уха и правого уха модели 140 головы, и конструкцию вибрационного блока 110 поддерживают верхней частью головы, выступающей в качестве точки опоры для реализации соединения вибрационного блока 110 и модели 140 головы. В некоторых вариантах осуществления лентообразная конструкция 124 может быть реализована в варианте II. Лентообразная конструкция 124 обходит верхнюю часть головы, и две стороны соответственно соединены с вибрационными блоками 110, расположенными у левого уха и правого уха модели 140 головы, и всю конструкцию вибрационного блока 110 поддерживают верхней частью головы, выступающей в качестве точки опоры для реализации соединения вибрационного блока 110 и модели 140 головы. В некоторых вариантах осуществления лентообразная конструкция 124 может быть реализована в варианте III. Лентообразная конструкция 124 обходит лицо, и две стороны соответственно соединены с вибрационными блоками 110, расположенными у левого уха и правого уха модели 140 головы, например, в виде очков, и всю конструкцию вибрационного блока 110 поддерживают переносицей, выступающей в качестве точки опоры для реализации соединения вибрационного блока 110 и модели 140 головы. В некоторых вариантах осуществления лентообразная конструкция 124 может быть реализована в варианте IV. Лентообразная конструкция 124 обходит лоб и затылок, то есть лентообразная конструкция 124 обходит голову по меньшей мере один раз, и две стороны соответственно соединены или прижаты с помощью вибрационных блоков 110, расположенных у левого уха и правого уха модели 140 головы. В некоторых вариантах осуществления на модели 140 головы рядом с импедансным устройством может быть просверлено отверстие. Лентообразную конструкцию 124 вставляют через отверстие и фиксируют, и лентообразная конструкция 124 прижимает вибрационный блок 110 к импедансному устройству. В некоторых вариантах осуществления лентообразная структура 124 может быть упругой конструкцией, такой как упругий пояс, резиновая лента и т.д. Лентообразная структура 124 также может быть неупругой конструкцией с регулируемой длиной.
В некоторых вариантах осуществления, как показано на фиг. 17, коннектор может представлять собой заушник 125, и заушник 125 закрепляет вибрационный блок 110 на импедансном устройстве 100. В некоторых вариантах осуществления заушник 125 адаптирован к уху модели 140 головы. В некоторых вариантах осуществления заушник 125 адаптирован к ушной раковине модели 140 головы. В некоторых вариантах осуществления заушник 125 может представлять собой односторонний заушник 125, и заушник 125 может быть расположен с любой стороны уха, чтобы закрепить вибрационный блок 110 на импедансном устройстве 100, соответствующем уху. В некоторых вариантах осуществления заушник 125 может быть двусторонним заушником 125, и два вибрационных блока 110 могут быть соответственно закреплены на импедансном устройстве 100 ушей с обеих сторон.
Следует отметить, что конструкция коннектора, показанная на фиг. 16-17, приведена только для примера описания и не ограничивает объем настоящего изобретения. Для специалистов в данной области конструкция коннектора может быть модифицирована или изменена в соответствии с указаниями настоящего описания. Например, лентообразных структур может быть несколько, и лентообразная структура может охватывать всю голову. В качестве другого примера, заушник может быть выполнен в виде наушника на все ухо. Эти модификации и изменения все еще находятся в рамках объема настоящего изобретения.
На фиг. 18 приведена кривая амплитудно-частотной характеристики системы для моделирования воздействия головы на вибрацию вибрационного блока. Пунктирная кривая представляет измеренную кривую 2101 частотной характеристики вибрационного блока, когда вибрационный блок подвешен, штриховая кривая представляет измеренную кривую 2102 частоты вибрации после соединения вибрационного блока и области козелка лица реального человека, а сплошная кривая представляет измеренную кривую 2103 частотной характеристики после соединения импедансного устройства и вибрационного блока. Как показано на фиг. 18, при сравнения кривой 2101 частотной характеристики и кривой 2102 частотной характеристики можно видеть, что разница между кривой частотной характеристики вибрационного блока, когда вибрационный блок подвешен, и кривой частоты вибрации после соединения вибрационного блока с областью козелка лица реального человека действительно существенна. При сравнении кривой 2102 частотной характеристики и кривой 2103 частотной характеристики в диапазоне от 25 Гц до 100 Гц частотная характеристика после соединения импедансного устройства и вибрационного блока в основном согласуется с частотной характеристикой после соединения вибрационного блока и областью козелка лица реального человека; в диапазоне от 100 Гц до 1000 Гц разница между частотной характеристикой после соединения импедансного устройства и вибрационного блока и частотной характеристикой после соединения вибрационного блока и областью козелка лица реального человека невелика, то есть кривая частотной характеристики 2102 и кривая 2103 частотной характеристики в основном одинаковы. Можно видеть, что импедансное устройство, описанное в этом раскрытии, в основном согласуется механическим импедансом реального лица, что может отражать механические характеристики реального лица.
Следует отметить, что полезные эффекты, производимые различными вариантами осуществления, могут быть различными. В различных вариантах осуществления полезные эффекты, которые могут быть получены, могут представлять собой любую из вышеуказанных или других комбинаций, или это может быть любой другой полезный эффект, который может быть получен.
Описав таким образом основные концепции, специалистам в данной области после прочтения этого подробного описания может быть очевидно, что вышеприведенное подробное описание предназначено для представления только в качестве примера и не является ограничивающим. Могут иметь место различные изменения, улучшения и модификации, которые предназначены для специалистов в данной области, хотя здесь прямо не указано. Предполагается, что эти изменения, улучшения и модификации предусмотрены в этом описании и соответствуют сущности и объему примерных вариантов осуществления этого изобретения.
Более того, для описания вариантов осуществления настоящего изобретения использовали определенную терминологию. Например, термины "один вариант осуществления", "вариант осуществления" и/или "некоторые варианты осуществления" означают, что конкретный признак, конструкция или характеристика, описанные в связи с вариантом осуществления, включены по меньшей мере в один вариант осуществления настоящего изобретения. Следовательно, подчеркивается и должно быть принято во внимание, что два или более упоминания "варианта осуществления", "одного варианта осуществления" или "альтернативного варианта осуществления" в различных частях этого описания не обязательно относятся к одному и тому же варианту осуществления. Кроме того, конкретные признаки, конструкции или характеристики могут быть объединены в качестве подходящих в одном или нескольких вариантах осуществления настоящего изобретения.
Кроме того, приведенный порядок элементов или последовательностей обработки или использование цифр, букв или других обозначений, таким образом, не предназначены для ограничения заявленных процессов и способов каким-либо порядком, который может быть указан в формуле изобретения. Хотя в приведенном выше раскрытии на различных примерах обсуждают то, что в настоящее время считают множеством полезных вариантов осуществления изобретения, следует понимать, что такая детализация предназначена исключительно для этой цели, и что прилагаемая формула изобретения не ограничена раскрытыми вариантами осуществления, а, наоборот, предназначена для охвата модификаций и эквивалентных устройств, которые соответствуют сущности и объему раскрытых вариантов осуществления. Например, хотя реализация различных компонентов, описанных выше, может быть выполнена в аппаратном устройстве, она также может быть выполнена в виде программного решения, например, установка на существующий сервер или мобильное устройство.
Аналогичным образом, следует понимать, что в приведенном выше описании вариантов осуществления настоящего изобретения различные признаки иногда сгруппированы вместе в одном варианте осуществления, фигуре или их описании с целью упрощения раскрытия, способствующего пониманию одного или нескольких различных вариантов осуществления. Тем не менее, не следует полагать, что способ раскрытия отражает намерение, что заявленная сущность требует больше признаков, чем ясно сказано в каждом пункте формулы изобретения. Скорее, заявленная сущность может заключаться не во всех признаках одного ранее раскрытого варианта осуществления.
В некоторых вариантах осуществления числа, выражающие количество или свойства, используемые для описания и утверждения определенных вариантов осуществления изобретения, следует понимать как модифицированные в некоторых случаях термином "около", "приблизительно" или "по существу". Например, "около", "приблизительно" или "по существу" может указывать на отклонение на ±20% от значения, которое оно описывает, если не указано иное. Соответственно, в некоторых вариантах осуществления числовые параметры, изложенные в письменном описании и прилагаемой формуле изобретения, являются приблизительными и могут варьироваться в зависимости от требуемых свойств, которые должны быть получены в конкретном варианте осуществления. В некоторых вариантах осуществления числовые параметры следует интерпретировать в свете количества сообщаемых значащих цифр и путем применения обычных методов округления. Несмотря на то, что числовые диапазоны и параметры, определяющие широкую область применения некоторых вариантов осуществления изобретения, являются приблизительными, числовые значения, приведенные в конкретных примерах, приведены настолько точно, насколько это практически возможно.
Каждый из патентов, патентных заявок, публикаций патентных заявок и других материалов, таких как статьи, книги, спецификации, публикации, документы, вещи и/ или тому подобное, на которые приводят ссылку в этом документе, включены в настоящий документ посредством этой ссылки полностью для всех целей, за исключением любого делопроизводства судебного процесса, связанного с ним, любого из них, несовместимых с настоящим документом или противоречащих ему, или любого из них, которое может иметь ограничивающее влияние в отношении самого широкого объема пунктов формулы изобретения, которые сейчас или позже связаны с настоящим документом. В качестве примера, в случае любого несоответствия или конфликта между описаниями, определением и/или использованием термина, связанного с любым из включенных материалов, и термином, связанным с настоящим документом, описание, определение и/или использование термина в настоящем документе имеют преимущественную силу.
В заключение, следует понимать, что варианты осуществления заявки, раскрытые в этом документе, иллюстрируют принципы вариантов осуществления заявки. Другие модификации, которые могут быть использованы, могут входить в объем изобретения. Таким образом, в качестве примера, но не ограничения, альтернативные конфигурации вариантов осуществления изобретения могут быть использованы в соответствии с изложенными в этом документе идеями. Соответственно, варианты осуществления настоящего изобретения не ограничены тем, что точно показано и описано.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛУХОВОЙ АППАРАТ | 2021 |
|
RU2800623C1 |
| СИСТЕМЫ, СПОСОБЫ И УСТРОЙСТВА ДЛЯ ВЫВОДА АКУСТИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2807171C1 |
| ЗВУКОПЕРЕДАЮЩИЕ УСТРОЙСТВА С КОСТНОЙ ПРОВОДИМОСТЬЮ | 2020 |
|
RU2809949C1 |
| МИКРОФОН КОСТНОЙ ПРОВОДИМОСТИ | 2020 |
|
RU2802593C1 |
| НОСИМЫЕ УСТРОЙСТВА | 2021 |
|
RU2809946C1 |
| УСТРОЙСТВО И СПОСОБ ПОДАВЛЕНИЯ ДИНАМИЧЕСКОГО ПОВЕДЕНИЯ КАБЕЛЯ | 2015 |
|
RU2705512C2 |
| ЗВУКОПРОИЗВОДЯЩЕЕ УСТРОЙСТВО | 2021 |
|
RU2800544C1 |
| МОДЕЛЬ УХА, ИСКУССТВЕННАЯ ГОЛОВА И ИЗМЕРИТЕЛЬНАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ С ИСПОЛЬЗОВАНИЕМ МОДЕЛИ УХА И ИСКУССТВЕННОЙ ГОЛОВЫ | 2014 |
|
RU2642164C2 |
| АКУСТИЧЕСКОЕ УСТРОЙСТВО | 2020 |
|
RU2800594C1 |
| МОДЕЛЬ УХА, ИСКУССТВЕННАЯ ГОЛОВА И ИЗМЕРИТЕЛЬНАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ С ИСПОЛЬЗОВАНИЕМ МОДЕЛИ УХА И ИСКУССТВЕННОЙ ГОЛОВЫ | 2014 |
|
RU2706811C2 |




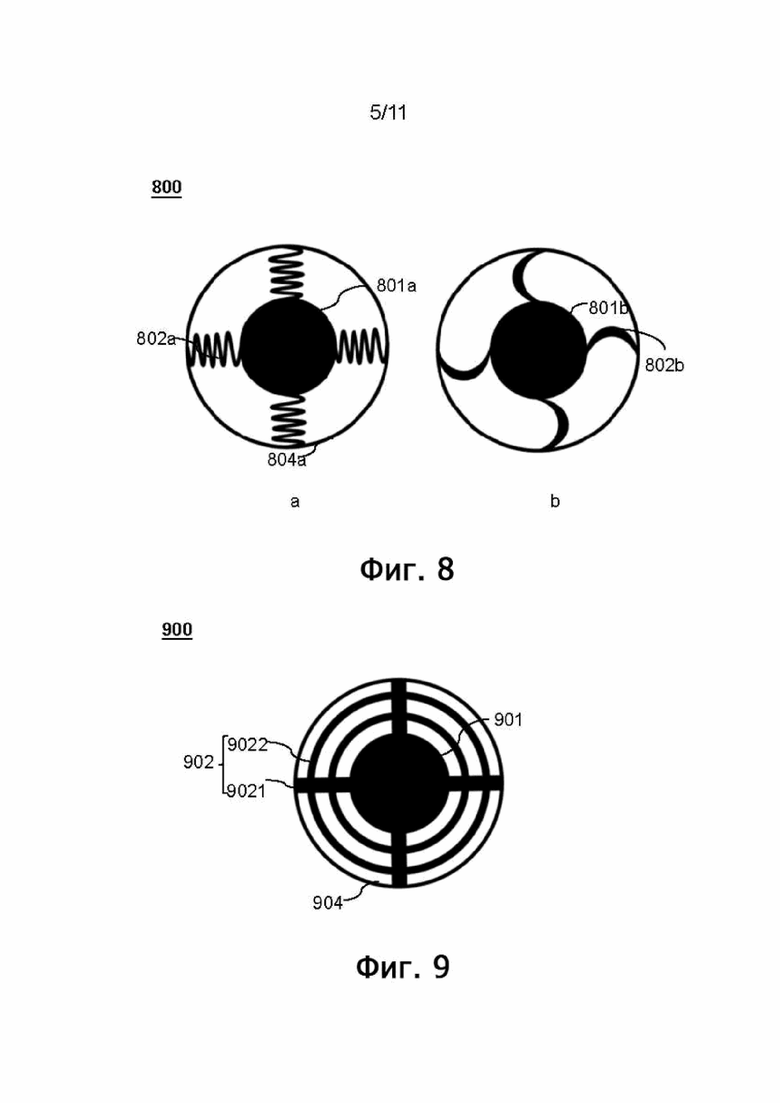


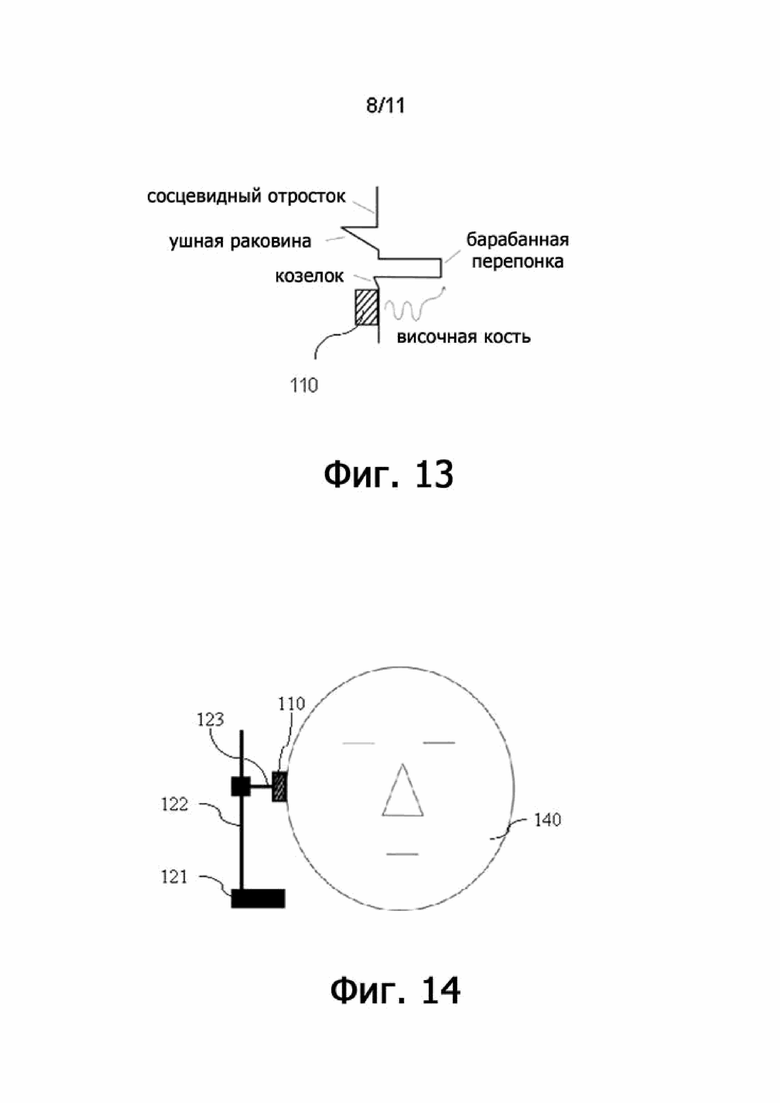

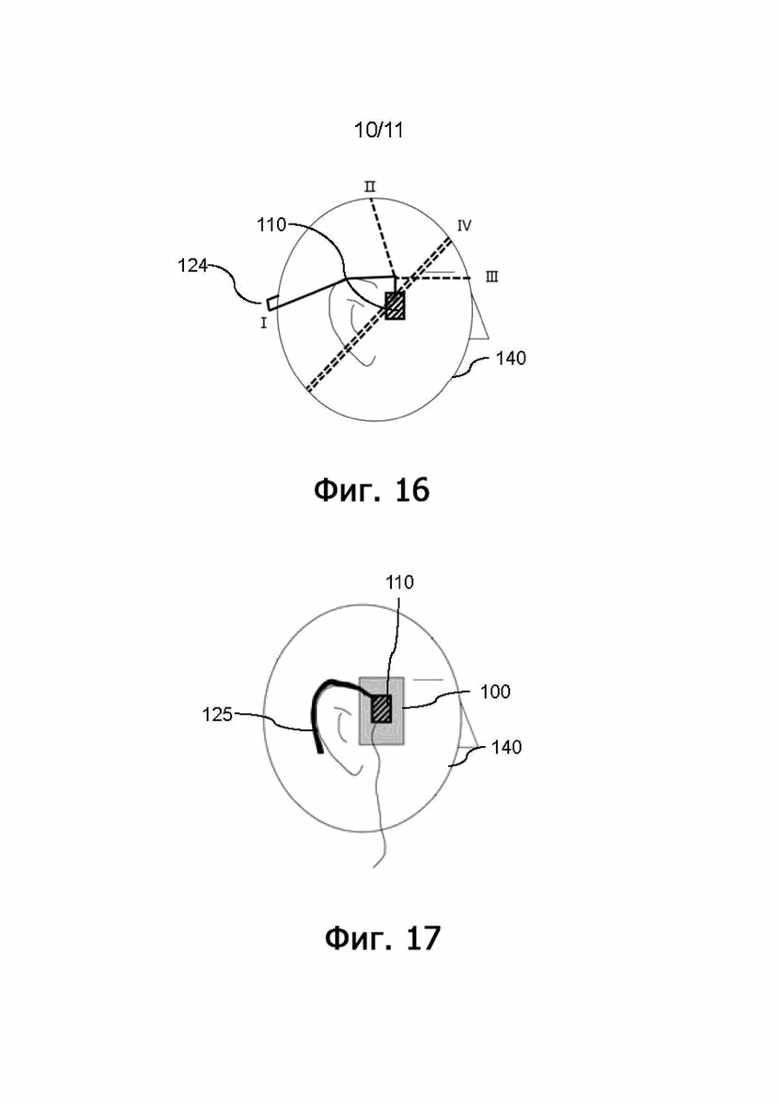
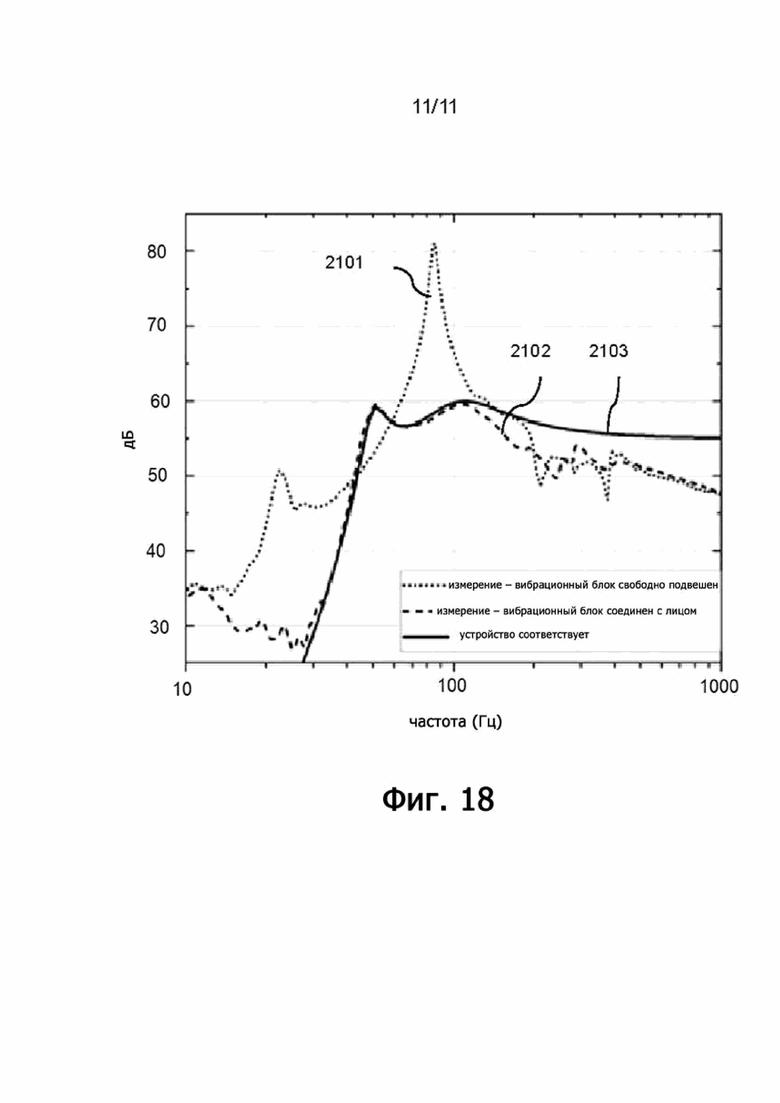
Изобретение относится к акустике. Импедансное устройство содержит компонент массы, по меньшей мере один упругий компонент и неподвижный компонент, причем компонент массы соединен с неподвижным компонентом посредством по меньшей мере одного упругого компонента; демпфирующий компонент, расположенный между компонентом массы и неподвижным компонентом и обеспечивающий демпфирование перемещения компонента массы относительно неподвижного компонента. Когда компонент массы контактирует с внешним вибрационным блоком, компонент массы принимает вибрацию внешнего вибрационного блока и перемещается относительно неподвижного компонента, при этом масса компонента массы находится в диапазоне от 0,5 до 5 г, коэффициент упругости по меньшей мере одного упругого компонента находится в диапазоне от 600 до 5000 Н/м, коэффициент демпфирования демпфирующего компонента находится в диапазоне от 1 до 4, и импедансное устройство обеспечивает внешнему вибрационному блоку механический импеданс в диапазоне от 6 до 50 дБ. Технический результат – возможность имитации области лица спереди ушной раковины человека. 9 з.п. ф-лы, 18 ил.
1. Импедансное устройство, содержащее:
компонент массы, по меньшей мере один упругий компонент и неподвижный компонент, причем компонент массы соединен с неподвижным компонентом посредством по меньшей мере одного упругого компонента;
демпфирующий компонент, расположенный между компонентом массы и неподвижным компонентом и обеспечивающий демпфирование перемещения компонента массы относительно неподвижного компонента, причем
когда компонент массы контактирует с внешним вибрационным блоком, компонент массы принимает вибрацию внешнего вибрационного блока и перемещается относительно неподвижного компонента, при этом масса компонента массы находится в диапазоне от 0,5 до 5 г, коэффициент упругости указанного по меньшей мере одного упругого компонента находится в диапазоне от 600 до 5000 Н/м, коэффициент демпфирования демпфирующего компонента находится в диапазоне от 1 до 4, и импедансное устройство обеспечивает внешнему вибрационному блоку механический импеданс в диапазоне от 6 до 50 дБ.
2. Импедансное устройство по п. 1, в котором масса компонента массы находится в диапазоне от 1 до 3,6 г, коэффициент упругости указанного по меньшей мере одного упругого компонента находится в диапазоне от 900 до 1700 Н/м, а коэффициент демпфирования демпфирующего компонента находится в диапазоне от 2 до 3,7.
3. Импедансное устройство по п. 1, в котором амплитудно-частотная характеристика импедансного устройства имеет впадину, причем значение впадины находится в диапазоне от 6 до 15 дБ.
4. Импедансное устройство по п. 1, в котором неподвижный компонент включает в себя неподвижный рычаг, причем компонент массы расположен напротив неподвижного рычага, одна сторона компонента массы обращена к неподвижному рычагу, а другая сторона компонента массы обращена от неподвижного рычага.
5. Импедансное устройство по п. 4, в котором демпфирующий компонент расположен между компонентом массы и неподвижным рычагом.
6. Импедансное устройство по любому из пп. 1-5, в котором указанный по меньшей мере один упругий компонент включает в себя пружину, причем демпфирующий компонент вставлен в пружину или расположен вокруг нее.
7. Импедансное устройство по любому из пп. 1-5, в котором неподвижный компонент представляет собой конструкцию корпуса с одним открытым концом, причем компонент массы подвешен в отверстии конструкции корпуса с помощью указанного по меньшей мере одного упругого компонента.
8. Импедансное устройство по п. 7, в котором указанный по меньшей мере один упругий компонент включает в себя множество упругих компонентов, причем множество упругих компонентов распределены по боковой стенке компонента массы с интервалами.
9. Импедансное устройство по п. 7, в котором указанный по меньшей мере один упругий компонент дополнительно включает в себя сетчатую конструкцию.
10. Импедансное устройство по п. 7, в котором демпфирующий компонент расположен между компонентом массы и нижней стенкой конструкции корпуса, причем один конец демпфирующего компонента соединен со стороной компонента массы, а другой конец демпфирующего компонента соединен с нижней стенкой конструкции корпуса.
| US 9746047 B2, 29.08.2017 | |||
| AU 4868196 A, 04.09.1996 | |||
| CN 210381291 U, 21.04.2020 | |||
| AU 3653497 A, 03.08.1998 | |||
| CN 0202996287 U, 12.06.2013 | |||
| JP 2012053434 A, 15.03.2012 | |||
| JP 63167534 U, 01.11.1988 | |||
| US 20190028819 A1, 24.01.2019 | |||
| CN 105007551 B, 19.04.2017. |

