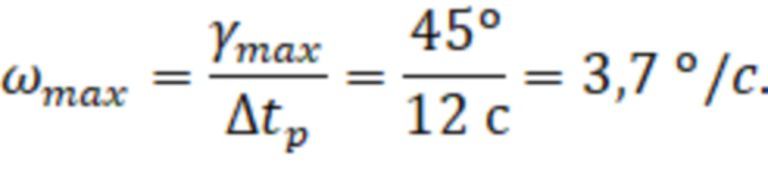
Группа изобретений относится к ракетно-космической технике и может быть использована для спасения створки головного обтекателя (СГО) ракеты-носителя (РН) после отделения СГО от РН при движении на траектории спуска.
Известно изобретение «Способ применения парашютной системы для спасения отработанных ступеней ракет-носителей или их частей и спускаемых космических аппаратов» (патент РФ №2495802), в котором к моменту ввода парашютной системы на высотах ниже 10 км заканчивают гашение гиперзвуковых скоростей за счет трения в плотных слоях атмосферы без разрушения конструкции за счет организованного входа ракетного блока с применением бортовых систем активной и пассивной ориентации, стабилизации, торможения и тепловой защиты, с последующим вводом стандартной парашютной системы с обеспечением вертолетного подхвата на высотах ниже 3 км.
Наиболее близким техническим решением (прототипом) является способ спасения СГО и устройство, реализованные на РН «Фалкон-9» компании SpaceX (www.elonx.net Fairing Recovery Compendium), в котором каждая створка головного обтекателя компании SpaceX (СГОх) представляет собой маневрирующий летательный аппарат, снабжённый системой управления и исполнительными органами на основе газореактивных сопел (ГРС) и приводами для управления стропами парашюта для приземления на подвижную морскую платформу, которая на последнем этапе полёта маневрирует совместно с СГОх, спускаемом на парашюте.
К основным недостаткам этого технического решения при применении к спасению российской створки головного обтекателя (СГОр) относятся следующие.
1. Программа выведения РН в прототипе энергетически оптимальная, после отделения СГОх осуществляется её движение по траектории спуска в плоскости пуска РН и СГОх приземляется на поверхности Мирового океана, нет необходимости изменять координаты точки падения, т.к. там нет зон экономической деятельности. Для СГОр при его полёте возникает необходимость изменять координаты точки падения т.к. он приземляется на поверхности Земли и, в подавляющем большинстве пусков РН, соответствующий район падения СГО попадает в зоны экономической деятельности, в результате чего программу выведения РН корректируют их условия прилёта СГО в другой район падения, что приводит к отклонению от энергетически оптимальной траектории выведения РН и, соответственно, приводит к снижению массы выводимого полезного груза.
2. В способе спуска СГОх осуществляют угловую стабилизацию полёта относительно программной траектории движения, не изменяя движение центра масс СГОх, что приемлемо для морских районов падения, находящихся в плоскости пуска РН. Для сухопутных районов падения СГОр, которые, как правило, находятся существенно дальше от расчётной точки падения СГОр при её полёте по траектории спуска, необходима как угловая стабилизация полёта СГОр, так и корректировка траектории движения центра масс СГОр. Существующий способ управления и возможности конструкции СГОх не позволяют реализовать такую корректировку траектории движения центра масс СГОх, что приводит к дополнительным затратам на создание новых районов падения или ограничению возможностей выведения РН полезных нагрузок на требуемые орбиты.
3. На последнем этапе спуска устройство приёма СГОх, представляющее собой подвижную морскую платформу, маневрирует совместно с СГОх. Для сухопутного варианта района падения, что как правило, имеет место для СГОр, устройство приёма СГОр неподвижно.
Технической задачей предлагаемой группы изобретений является смещения точек падения СГОр на требуемые величины в определённом диапазоне за счёт корректировки параметров траектории спуска центра масс, что позволяет сохранять энергетически оптимальную траекторию выведения РН, не создавая новых районов падения.
Технический результат: расширение диапазона точек падения СГОр на требуемые величины в определённом диапазоне за счёт корректировки параметров траектории спуска центра масс, что позволяет сохранять энергетически оптимальную траекторию выведения РН, не создавая новых районов падения.
Указанная задача в предлагаемой группе изобретений достигается за счёт введения в известный способ спасения СГО, основанный на управляемом движении СГО после отделения от РН с использованием бортовой системы управления на основе бортовой цифровой вычислительной машины (БЦВМ) и безинерционной навигационной системы (БИНС) с периодической коррекцией расчётных параметров движения центра масс с использованием информации от глобальной навигационной спутниковой системы (ГНСС), исполнительными органами на основе двигательной установки с газореактивными соплами (ГРС) и управляемой парашютной системы, отделения парашютной системы после касания СГО приёмной системы, следующей последовательности действий:
1) в программу управления движением СГО вводят корректирующий импульс в окрестности апогея траектории полёта СГО и управление на участке аэродинамического спуска осуществляют изменением угла атаки и силового угла крена СГО,
2) программные параметры коррекции движения центра масс, углы атаки и силового угла крена СГО до момента раскрытия парашюта, определяют из условия допустимых затрат топлива двигательной установки СГО,
3) кинематические параметры движения СГО на момент раскрытия парашюта определяют из условия оптимальных кинематических параметров области ввода парашюта и координат точки приземления,
4) после раскрытия парашюта осуществляют безмоментный сброс остатков топлива двигательной установки через ГРС.
На фиг. 1-11 приведены схемы, поясняющие существо предлагаемых технических решений на примере СГО для РН типа «Союз-2».
На фиг. 1 показаны этапы движения СГО: 1 – этап успокоения (обнуления угловых скоростей СГО); 2 – этап коррекции орбиты в апогее траектории СГО; 3 – полёт на атмосферном участке; 4 – спуск на парашюте.
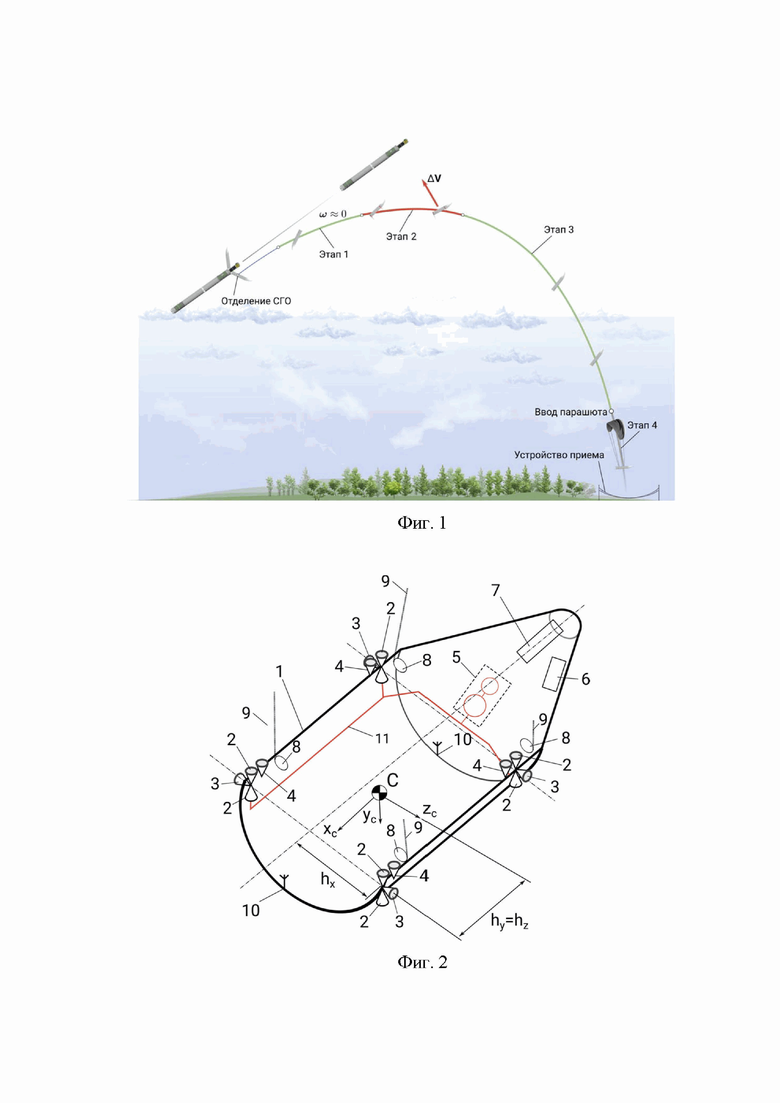
На фиг. 2 показана СГО и системы, входящие в её состав, где: 1 – оболочка СГО; 2 – ГРС для управления движением СГО по каналам тангажа, крена и выдачи корректирующего импульса в окрестности апогея; 3 – ГРС для управления угловым движением СГО в канале рыскания; 4 – дополнительные ГРС для создания корректирующего импульса в окрестности апогея траектории; 5 – емкость с пероксидом водорода с вытеснительной системой подачи для газореактивной системы; 6 – аппаратура системы управления спуском, в том числе БЦВМ, БИНС, взаимодействующая с ГНСС; 7 – контейнер с парашютом; 8 – управляемые барабаны для изменения длин строп; 9 - парашютная управляемая система типа крыло; 10 – антенн приема сигналов системы ГНСС; 11 – магистрали подачи пероксида водорода к ГРС.
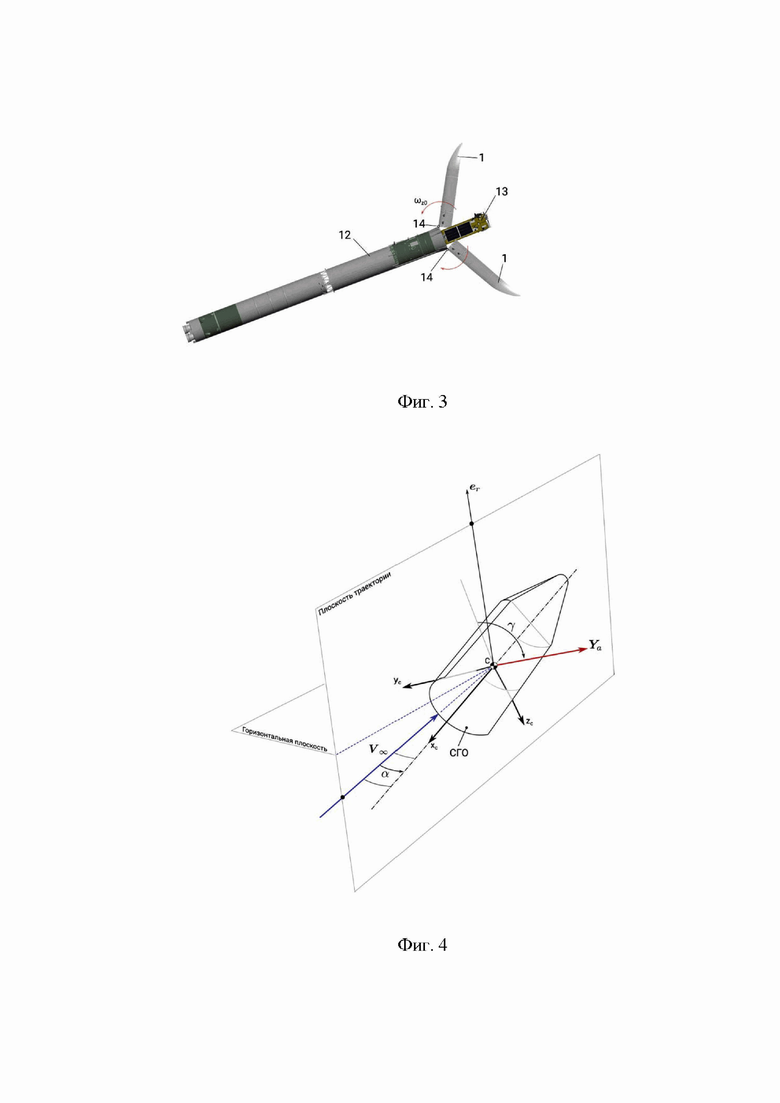
На фиг. 3 показан момент отделения СГО от РН на активном участке траектории полёта РН: 1 – СГО; 12– ступень РН; 13 – полезная нагрузка; 14 – оси вращения СГО при отделении от РН.
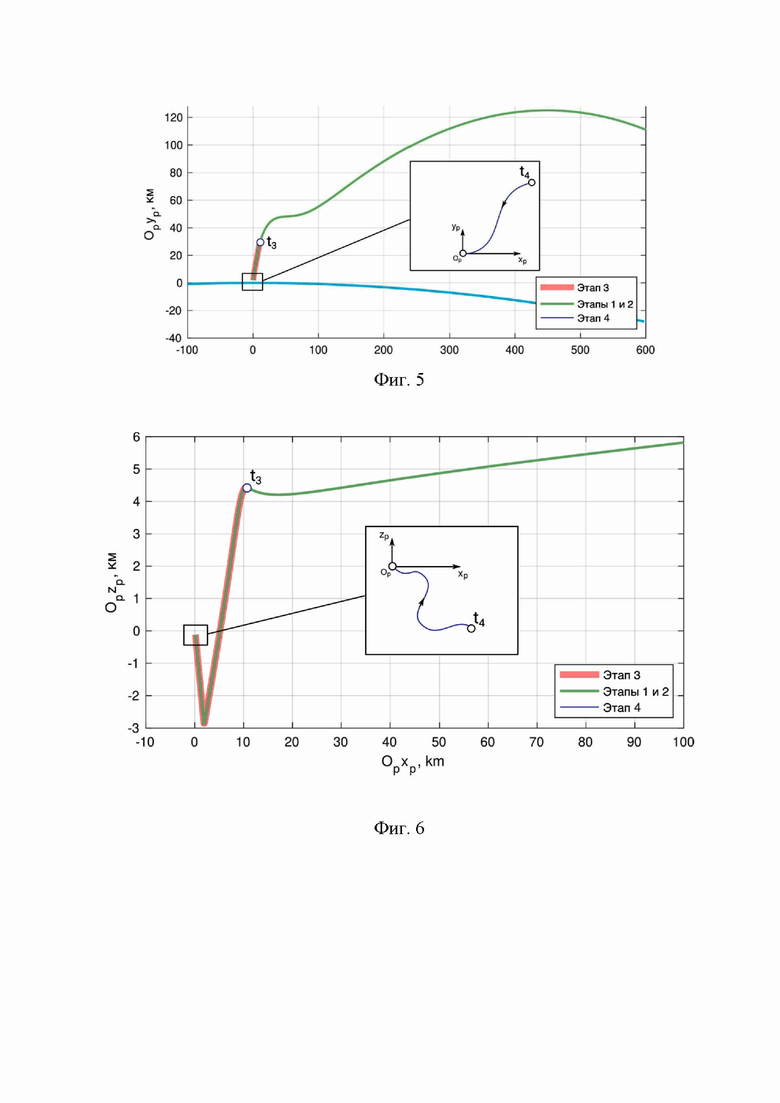
На фиг. 4 показаны угол атаки и силовой угол крена.
На фиг. 5, 6 показаны проекции траектории движения СГО на этапах успокоения, коррекции, аэродинамического торможения корпусом СГО и парашютирования на вертикальную плоскость Opxpyp и горизонтальную Opxpzp плоскости посадочной системы координат Opxpypzp, начало которой расположено в точке посадки; t3 – время начала третьего этапа (этап аэродинамического торможения); t4 – время начала четвертого этапа (спуск на парашюте).
Начало посадочной системы координат Opxpypzp расположено в точке посадки СГО, ось Opyp направлена вверх перпендикулярно плоскости местного горизонта, ось Opxp лежит на линии пересечения плоскости местного горизонта и вертикальной плоскости, проходящей через начало посадочной системы координат и начало стартовой системы координат РН. Ось Opxp направлена в сторону старта.
На фиг. 7, 8 приведены отклонения точки падения СГО для ввода парашюта (высота 2 км) в зависимости от силового угла крена  и угла атаки.
и угла атаки.
На фиг. 9, 10 приведены результаты моделирования движения СГО (смещение по дальности и курсу точки ввода парашютной системы) при управлении центром масс СГО только на третьем этапе полета в плотных слоях атмосферы для различных величин углов атаки и силового угла крена, а приложения импульса коррекции в апогее траектории (на втором этапе полёта).
На фиг. 11 приведена схема устройства газореактивной системы, использующей в качестве рабочего тела продукты разложения пероксида водорода (ПВ) на катализаторе: 15 – ёмкость для газа азота; 16 – электропневмоклапаны для каждого ГРС; 17 – электропневмоклапан подачи ПВ к ГРС; 18 – катализаторы разложения ПВ; 19 – выжимная мембрана для подачи ПВ к ГРС; 20 – электропневмоклапан для подачи газа азота на выжимную мембрану 19.
Обоснование введённых действий способа
1) В программу управления движением СГО вводят корректирующий импульс в окрестности апогея траектории полёта СГО. Управление на участке аэродинамического спуска осуществляют изменением угла атаки и силового угла крена СГО.
Положение точки ввода парашюта по дальности и курсу (боковое смещение по отношению к плоскости полета РН) может быть скорректировано двумя способами:
а) путем управления углом атаки и силовым углом крена на участке аэродинамического спуска, изменяя значение эффективной подъемной силы СГО (аэродинамический способ) [Ярошевский Д.Е. Охоцимский, Ю.Ф. Голубев, Ю.Г. Сихарулидзе. Алгоритмы управления космическим аппаратом при входе в атмосферу. -М.: Наука, 1975];
б) введением корректирующего импульса ΔV в апогее траектории полёта СГО, что позволяет скорректировать (обеспечить заданное смещение) положения точки ввода парашюта с минимальными энергетическими затратами.
Аэродинамический способ из-за малого аэродинамического качества СГО [Назарова Д. Н. Определение аэродинамических характеристик отделяемых от ракеты-носителя элементов конструкции в виде оболочек и разработка способов их аэродинамической стабилизации. Дисс. на соискание уч. степени канд. техн. наук, М.: 2019] не позволяет обеспечить существенное изменение координат точки ввода парашюта. В этой связи вводят корректирующий импульс центра масс СГО, который позволит существенно увеличить смещение точки ввода парашюта. На фиг. 8, 9 приведены соответствующие оценки.
2) Программные параметры коррекции движения центра масс, углы атаки и силового угла крена СГО до момента раскрытия парашюта, определяют из условия допустимых затрат топлива двигательной установки СГО.
Отличием предлагаемого решения от известных заключаются в том, что параметры коррекции движения центра масс СГО и параметры аэродинамического управления (углы атаки и скольжения) определяют совместно. Критерием выбора этих параметров является энергетические затраты, в данном случае это затраты топлива. В теоретическом плане возможно обеспечить возврат СГО на космодром старта, однако, при этом потребуются значительные расходы топлива и, соответственно, масса СГО будет значительной. Примером возврата отделившейся части первой ступени на космодром старта является американская РН «Фалкон-9», при этом масса выводимого полезного груза снижается на 30%.
Для приведения СГО на заданное устройство приема с заданной точностью используют четыре этапа управления движением центра масс СГО, для этого траекторию движение СГО разделяют на четыре этапа (фиг. 1):
1) этап стабилизации СГО при помощи системы ГРС 2 и 3 после отделения и выхода из зоны возмущающего воздействия факела двигательной установки РН;
2) этап программного разворота при помощи ГРС 2 и 3 и выдачи корректирующего импульса при помощи ГРС 4 с последующим разворотом на нейтральный угол атаки для входа в плотные слои атмосферы;
3) этап движения в плотных слоях атмосферы с использованием известного многошагового алгоритма управления движением СГО путем изменения силового угла крена [Ярошевский Д.Е. Охоцимский, Ю.Ф. Голубев, Ю.Г. Сихарулидзе. Алгоритмы управления космическим аппаратом при входе в атмосферу. -М.: Наука, 1975] до ввода парашюта;
4) этап управляемого движения на парашюте [Плосков С.Ю. Современные парашютные системы высокоточной доставки грузов. Инженерный журнал: наука и инновации, 2021, вып. 3. DOI: 10.18698/2308-6033-2021-3-2066].
Пример. На фиг. 9 (Изменение координаты точки ввода парашюта при изменении силового угла крена на третьем этапе движения) приведены результаты моделирования движения СГО при управлении центром масс СГО только на третьем этапе полета в плотных слоях атмосферы за счет программы изменения силового угла крена. Используют простейшую программу управления, при которой силовой угол крена остается постоянным на всем протяжении этапа. Результаты показывают, что управление движением СГО только на третьем этапе позволит изменить положение точки ввода парашюта по отношению к точке, положение которой определяют движением СГО с нулевым креном, на 22 км по дальности и до 14 км по курсу. При необходимости более значительного смещения точки ввода парашюта необходимо использовать ГРС для коррекции изменения движения СГО в окрестности апогея траектории.
Для сравнения, на фиг.10 (Изменение координаты точки ввода парашюта при изменении угла атаки и силового угла крена) приведены результаты моделирования движения СГО с корректирующим импульсом в окрестности апогея траектории. Суммарная сила тяги, создаваемая ГРС для формирования этого импульса равна 20% веса СГО, при этом продолжительность импульса равна 100 с.
Результаты показывают, что при выбранных параметрах коррекция движения центра масс СГО в окрестности апогея траектории позволяет более чем в два раза увеличить смещение по дальности и курсу точки ввода парашюта.
Таким образом, имея заданную величину смещения по дальности и курсу точки ввода парашюта, варьированием тремя программами управления: а) углом атаки, б) силовым углом крена, б) направлением и величиной корректирующего импульса при допустимых массах топлива, соответственно, всей массы СГО, определяется максимальная величина смещения по дальности и курсу точки ввода парашюта.
Оценка времени начала первого этапа
Первый этап начинают с момента выхода СГО из зоны газодинамического воздействия двигателей РН. Время достижения этого расстояние оценивается по формуле:
где  – средняя перегрузка РН на момент отделения СГО,
– средняя перегрузка РН на момент отделения СГО,  – ускорение свободного падения;.
– ускорение свободного падения;.  – длина зоны газодинамического воздействия двигателей РН на СГО; nx – перегрузка, развиваемая РН; g =9, 81 м/сек2.
– длина зоны газодинамического воздействия двигателей РН на СГО; nx – перегрузка, развиваемая РН; g =9, 81 м/сек2.
Пример. При движении РН с перегрузкой 1,5 ед. и расстоянии  м:
м:
Оценка длительности этапа 1 (стабилизации СГО после отделения)
Вращение СГО после отделения происходит вокруг поперечной оси, определяемой направлением оси вращения СГО при отделении до потери механической связи с РН (фиг.3). Из-за малости угловых скоростей относительно других осей СГО, продолжительность первого этапа (стабилизации) движения можно оценить по формуле:
где  – момент инерции СГО относительно поперечной оси;
– момент инерции СГО относительно поперечной оси;  – угловая скорость вращения СГО вокруг оси
– угловая скорость вращения СГО вокруг оси  ;
;  – плечо силы тяги сопел 2 относительно центра масс СГО (точка С);
– плечо силы тяги сопел 2 относительно центра масс СГО (точка С);  – суммарная тяга четырех сопел 2, создающая момент относительно оси СГО в одном направлении (плечи сил тяги сопел 2 относительно оси одинаковы). Формула (2) может быть использована для определения суммарной силы тяги сопел для гашения угловой скорости СГО за заданное время.
– суммарная тяга четырех сопел 2, создающая момент относительно оси СГО в одном направлении (плечи сил тяги сопел 2 относительно оси одинаковы). Формула (2) может быть использована для определения суммарной силы тяги сопел для гашения угловой скорости СГО за заданное время.
Пример. При суммарной тяге четырех сопел 2  , = 4 м, = 104 кг
, = 4 м, = 104 кг м2 и начальной угловой скорости СГО 1 радиан в секунду
м2 и начальной угловой скорости СГО 1 радиан в секунду  1/с время стабилизации СГО (длительность этапа 1):
1/с время стабилизации СГО (длительность этапа 1):

Определение затрат топлива для управления на этапах:
а) стабилизации, б) коррекции движения центра масс СГО,
в) аэродинамического спуска
а) Определение величины затрат топлива на этапе стабилизации
После отделения СГО, вращающаяся вокруг поперечной оси z с угловой скоростью , обладает кинетическим моментом: знак начальной угловой скорости известен, соответственно, известен и знак момента:
Для обнуления угловой скорости СГО используют ГРС системы управления СГО. Суммарный момент, создаваемый четырьмя ГРС 2, линии действия которых лежат в плоскости на расстоянии  от оси
от оси  (Фиг. 2), определятся по формуле:
(Фиг. 2), определятся по формуле:
 ,
,
При действии постоянной суммарной силы тяги создают импульс:
Из этого уравнения для заданной продолжительности гашения угловой скорости СГО  (продолжительность первого этапа) определяют необходимую суммарную силу тяги газореактивных сопел:
(продолжительность первого этапа) определяют необходимую суммарную силу тяги газореактивных сопел:
Расход газа Дmг на гашение угловой скорости СГО определяют по формуле:
где  – удельный импульс ГРС (м/с).
– удельный импульс ГРС (м/с).
Пример. При  м и удельном импульсе 1500 м/с (однокомпонентный двигатель на перекисли водорода) расход рабочего тела на торможение СГО составит:
м и удельном импульсе 1500 м/с (однокомпонентный двигатель на перекисли водорода) расход рабочего тела на торможение СГО составит:
б) Определение величины затрат топлива для корректирующего импульса ΔV, прикладываемого в окрестности апогея орбиты СГО
Расходы рабочего тела и продолжительность работы ГРС 4 (фиг.10) при выдаче корректирующего импульса в окрестности апогея орбиты СГО определяют требуемым смещением точки ввода парашюта.
Пример. На Фиг. 9 показаны положения точки ввода парашюта (высота 2 км) в зависимости от силового угла крена СГО при выдаче корректирующего импульса длительностью 100 с при угле атаки СГО равном 0 градусов. Суммарная сила тяги, создаваемая соплами 4 СГО, равна 20 % от веса СГО (m = 750 кг). Фиг. 9 показывает, что сила тяги указанного уровня, действующая на СГО в течение 100 с, может сместить точку ввода парашюта по курсу (по боковому смещению) более чем на 30 км в зависимости от программного угла крена на этапе работе ГРС 4.
Пример. На Фиг. 8 показаны положения точки ввода парашюта (высота 2 км) в зависимости от угла атаки (от 0 до 90 градусов) при силовом угле крена равном нулю. Изменение угла атаки СГО приводит к изменению направления силы тяги ГРС 2 в скоростной системе координат. Например, при  градусов импульс направлен в противоположном направлении вектора скорости, что приводит к смещению точки ввода парашюта на 80 км ближе к точке старта РН. Суммарная сила тяги ГТС, создаваемая соплами 4 СГО, равна 20 % от веса СГО (m = 750 кг).
градусов импульс направлен в противоположном направлении вектора скорости, что приводит к смещению точки ввода парашюта на 80 км ближе к точке старта РН. Суммарная сила тяги ГТС, создаваемая соплами 4 СГО, равна 20 % от веса СГО (m = 750 кг).
Расход рабочего тела при удельном импульсе ЖРД на пероксиде водорода составляет около 98 кг.
в) Определение величины затрат топлива для реализации аэродинамического манёвра СГО с использованием манёвра по силовому углу крена
На третьем этапе движения используют схему управления с изменением силового угла крена, предполагающую одну или несколько перекладок СГО по силовому углу крена. Момент M, создаваемый ГРС для изменения силового угла крена при движении с постоянным углом атаки  должен быть направлен вдоль вектора скорости движения СГО. Проекции момента на собственные оси СГО движении определяют по формуле:
должен быть направлен вдоль вектора скорости движения СГО. Проекции момента на собственные оси СГО движении определяют по формуле:

Момент, создаваемый четырьмя ГРС относительно оси  :
:
где – суммарная сила тяги четырех ГРС, направленных вдоль оси  . Момент, создаваемый двумя ГРС относительно оси
. Момент, создаваемый двумя ГРС относительно оси 
где  – сила тяги двух ГРС, направленных вдоль оси ,
– сила тяги двух ГРС, направленных вдоль оси ,  – плечо ГРС канала крена,
– плечо ГРС канала крена,  – плечо ГРС канала рыскания СГО.
– плечо ГРС канала рыскания СГО.

Получим требуемое соотношение сил тяги ГРС для разворота СГО вокруг вектора скорости при изменении силового угла крена:
Учитывая, что для управления угловым движением СГО целесообразно использовать двигатели с постоянной тягой, найденное соотношение может быть заменено на соотношение импульсов тяг двигателей, т.е. требуемое воздействие на СГО, заменяют импульсным режимом работы ГРС 2, обеспечивающих выполнение условия:
где  ,
,  – суммарные импульсы двух и четырех ГРС 2, соответственно.
– суммарные импульсы двух и четырех ГРС 2, соответственно.
Затраты газа на разворот СГО на угол  при изменении силового угла крена с до минус или наоборот за время
при изменении силового угла крена с до минус или наоборот за время  определяют по формуле:
определяют по формуле:
где – удельный импульс газореактивного сопла,  – момент инерции СГО относительно оси, проходящей через центр масс СГО, параллельной вектору скорости набегающего потока.
– момент инерции СГО относительно оси, проходящей через центр масс СГО, параллельной вектору скорости набегающего потока.
Пример. При  ,
,  м/с, hz = 4 м, hx = 2 м,
м/с, hz = 4 м, hx = 2 м,  ,
,  ,
,  :
:

Максимальная угловая скорость разворота будет равна:
3) Кинематические параметры движения СГО на момент раскрытия парашюта определяют из условия оптимальных кинематических параметров области ввода парашюта и координат точки приземления.
Предполагается, что в составе системы спасения СГО используется отработанная современная парашютная система высокоточной доставки грузов (ПСВД) [Плосков С.Ю. Современные парашютные системы высокоточной доставки грузов. Инженерный журнал: наука и инновации, 2021, вып. 3. DOI: 10.18698/2308-6033-2021-3-2066], которая имеет свои оптимальные условия задействования и конкретные достижимые границы доставки. С учётом границ достижимости ПСВД и оптимальных условий её задействования определяют кинематические параметры движения СГО на момент раскрытия парашюта.
Разделение программы управления движением СГО на 2 части (этапы 1, 2, 3 и этап 4) обусловлено и тем, что на этапах 1 – 3 управление осуществляется на основе уравнений движения СГО с управляющими органами в виде ГРС, а на этапе 4 - на основе уравнений движения ПВСД с подвешенным грузом с управляющими органами в виде строп регулирующих ориентацию парашюта относительно набегающего потока.
4) после раскрытия парашюта осуществляют безмоментный сброс остатков топлива двигательной установки через ГРС.
Это действие обусловлено повышением пожаровзрывобезопасности при посадке СГО. Практическая реализация безмоментного сброса остатков топлива через ГРС не представляет технических проблем.
Устройство для реализации способа
В качестве прототипа устройства для предлагаемого технического решения используется техническое решение, реализуемое на СГОх РН «Фалкон-9» SpaceX (www.elonx.net Fairing Recovery Compendium), включающее в свой состав управляемый парашют, систему управления движением СГО на основе БЦВМ и ГНСС с исполнительными органами в виде ГРС, ёмкость для рабочего тела ГРС, управляемые приводы строп, систему ввода парашюта и отделения от СГО при приземлении на устройство приёма в виде сети.
К недостатку этого устройства при применении к предлагаемому способу спасения СГОр относится отсутствие возможности существенного изменения координат точки падения СГО.
Технической задачей предлагаемого устройства является расширение смещения точек падения СГОр на требуемые величины.
Указанная задача достигается введением в состав известного устройства, включающего управляемый парашют, систему управления движением СГО на основе БЦВМ и ГНСС с исполнительными органами, управляемые приводы строп, систему ввода парашюта и отделения от СГО при приземлении на устройство приёма в виде сети, следующих систем:
1) ёмкость со сжатым газом, соединённую через магистраль и управляемый клапан,
2) ёмкость с мембранной подачей пероксида водорода, соединённую через управляемые электропневмоклапаны,
3) катализаторы, установленные в газореактивных двигателях.
На фиг. 11 показана схема газореактивной системы СГО, использующей в качестве рабочего тела продукты разложения пероксида водорода (ПВ) на катализаторе.
Схема работы предлагаемого устройства
В ёмкости 5 размещают запас ПВ, при этом ёмкость 5 соединена магистралью с электропневмоклапаном 17. ПВ поступает в магистраль 11. Магистраль 11 соединена с газореактивными соплами 2, 3 и 4, управляемыми электропневмоклапанами 16 по командам от системы управления СГО 6. ПВ после открытия электропневмоклапанов 16 попадает на катализаторы 18 после чего продукты разложения ПВ (горячая парогазовая смесь) сбрасываются через сопла, создавая реактивную тягу. Для подачи пероксида водорода из ёмкости 5 в магистраль 11 используют вытеснительную систему подачи газа азота из ёмкости 15.
Обоснование введённых в устройство систем.
Для коррекции движения центра масс СГО необходимо создавать значительную тягу, сравнимую с массой СГО. Создание такой тяги при помощи традиционных ГРС на холодном газе, используемых, например, компанией SpaceX для стабилизации движения СГО при движении в атмосфере приведет к значительным затратам рабочего тела, учитывая незначительный удельный импульс двигателей на холодном газе. Целесообразно использовать более эффективные однокомпонентные ЖРД на перекиси водорода, которые с одной стороны имеют более высокий удельный импульс, а с другой, в отличие от двухкомпонентных ЖРД, имеют более простую конструкцию. Выбор перекиси водорода в качестве рабочего тела обусловлен его минимальной токсичностью: по удельному импульсу перекись уступает, например, гидразину, но превосходит их по экологичности, стоимости, простоте и безопасности применения.
Технический эффект предлагаемого устройства заключается в существенном расширении диапазона точек падения СГО, что позволяет использовать существующие районы падения взамен создания новых.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2726214C1 |
| СПОСОБ СПУСКА УСКОРИТЕЛЯ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ ПРИ АВАРИЙНОМ ВЫКЛЮЧЕНИИ ЖРД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2746473C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2581894C1 |
| СПОСОБ ОТДЕЛЕНИЯ ПОЛЕЗНЫХ НАГРУЗОК ОТ ОРБИТАЛЬНОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ С ЖИДКОСТНЫМ РАКЕТНЫМ ДВИГАТЕЛЕМ | 2020 |
|
RU2748079C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ВЫВЕДЕНИЯ ГРУППЫ СПУТНИКОВ НА НЕКОМПЛАНАРНЫЕ ОРБИТЫ (ВАРИАНТЫ) | 2015 |
|
RU2583507C1 |
| Способ спуска отделяющейся части ступени ракеты космического назначения и устройство для его осуществления | 2015 |
|
RU2621771C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СТАРТА РАКЕТЫ С САМОЛЕТА | 1992 |
|
RU2068169C1 |
| УСТРОЙСТВО ДЛЯ СПУСКА С ВЫСОТНЫХ ОБЪЕКТОВ ПРИ ПОМОЩИ АВТОРОТАЦИИ | 2021 |
|
RU2757464C1 |
| СПОСОБ СТАРТА РАКЕТЫ С САМОЛЕТА ДЛЯ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА НА ОРБИТУ (ВАРИАНТЫ) | 2004 |
|
RU2289084C2 |
| СИСТЕМА СПАСЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2544023C1 |
Группа изобретений относится к области ракетно-космической техники и может быть использована для спасения створки головного обтекателя (СГО) ракеты-носителя (РН). Способ спасения основан на управляемом движении СГО с использованием бортовой системы управления с периодической коррекцией расчётных параметров движения центра масс. Используется двигательная установка с газореактивными соплами и управляемая парашютная система. В апогее траектории полёта СГО в программу управления движением вводят корректирующий импульс. Программные параметры коррекции движения центра масс, углы атаки и силового угла крена СГО определяют из условия допустимых затрат топлива двигательной установки, а кинематические параметры движения СГО на момент раскрытия парашюта определяют из условия оптимальных кинематических параметров области ввода парашюта и координат точки приземления. После раскрытия парашюта осуществляют безмоментный сброс остатков топлива двигательной установки через газореактивные сопла. Устройство спасения включает в свой состав управляемый парашют, систему управления движением СГО с исполнительными органами, систему ввода парашюта и отделения от СГО при приземлении, ёмкость с сжатым газом, ёмкость с пероксидом водорода, клапаны, катализаторы. Достигается расширение диапазона точек падения СГО на требуемые величины в определённом диапазоне и сохранение энергетически оптимальной траектории выведения РН, не создавая новых районов падения. 2 н.п. ф-лы, 11 ил., 2 табл.
1. Способ спасения створки головного обтекателя (СГО), основанный на управляемом движении СГО с использованием бортовой системы управления на основе бортовой цифровой вычислительной машины и безинерционной навигационной системы с периодической коррекцией расчётных параметров движения центра масс с использованием информации от глобальной навигационной спутниковой системы, исполнительными органами на основе двигательной установки с газореактивными соплами (ГРС) и управляемой парашютной системы, отделения парашютной системы после касания СГО приёмной системы, отличающийся тем, что в программу управления движением СГО вводят корректирующий импульс в апогее траектории полёта СГО, а также тем, что программные параметры коррекции движения центра масс, углы атаки и силового угла крена СГО до момента раскрытия парашюта, определяют из условия допустимых затрат топлива двигательной установки СГО, а кинематические параметры движения СГО на момент раскрытия парашюта определяют из условия оптимальных кинематических параметров области ввода парашюта и координат точки приземления, после раскрытия парашюта осуществляют безмоментный сброс остатков топлива двигательной установки через газореактивные сопла.
2. Устройство для реализации способа по п. 1, включающее в свой состав управляемый парашют, систему управления движением СГО с исполнительными органами, систему ввода парашюта и отделения от СГО при приземлении на систему приёма, отличающееся тем, что в его состав введены ёмкость с сжатым газом, соединённая через магистраль и управляемый клапан с ёмкостью с мембранной подачей пероксида водорода, соединённой через управляемые клапаны с катализаторами, установленными в газореактивных двигателях.
| СПОСОБ ВОЗВРАТА ГОЛОВНОГО ОБТЕКАТЕЛЯ РАКЕТЫ НА ЗЕМЛЮ (ВАРИАНТЫ) И ОБТЕКАТЕЛЬ ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА (ВАРИАНТЫ) | 2021 |
|
RU2771531C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ | 2016 |
|
RU2643073C1 |
| СПОСОБ ПРИМЕНЕНИЯ ПАРАШЮТНОЙ СИСТЕМЫ ДЛЯ СПАСЕНИЯ ОТРАБОТАННЫХ СТУПЕНЕЙ РАКЕТ-НОСИТЕЛЕЙ ИЛИ ИХ ЧАСТЕЙ И СПУСКАЕМЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2495802C2 |
| CN 110498064 A, 26.11.2019 | |||
| CN 112556515 A, 26.03.2021. | |||

