Область техники
Изобретение относится к области распределения электрической энергии и предназначено для использования при осуществлении интеллектуального управления режимами работы электроэнергетических систем.
Уровень техники
Известен способ фазового управления напряжением в электрической системе (Патент RU 2588058 от 27.06.2016, МПК H02J 3/12), при котором создают фазовое смещение напряжения, отличающийся тем, что задаются требуемыми режимными параметрами электрической системы, механический момент абсолютного движения ротора синхронной машины электрической системы расчленяют на относительный и переносный и управление переносным моментом производят указанным фазовым смещением напряжения в соответствии с требуемыми режимными параметрами.
Известны система и способ для управления электроэнергетической системой (Патент RU 2518178 от 10.06.2014, МПК H02J 3/00, H02J 13/00, H04L 12/00, H04L 12/54, G05B 19/00, G05B 19/042), содержащие для улучшения управления сетями электроэнергетической системы базовую структуру интегрирования для обеспечения связи множества компонентов электросети и энергетической системы с центральным органом управления электроэнергетической системы, который управляет электроэнергетической системой, причем указанное множество компонентов электросети и энергетической системы выполнено с возможностью генерировать рабочие данные и данные событий в электроэнергетической системе, содержащей:
рабочую шину, выполненную с возможностью передачи рабочих данных в центральный орган управления электроэнергетической системы, причем рабочие данные содержат по меньшей мере одно измерение в режиме реального времени напряжения, тока, активной мощности или реактивной мощности по меньшей мере для части электроэнергетической системы;
и шину событий, выполненную с возможностью передачи данных событий в центральный орган управления электроэнергетической системы, причем шина событий отделена от рабочей шины, данные событий являются отличными от измерений в режиме реального времени, причем получены из указанных измерений в режиме реального времени и содержат по меньшей мере одно аналитическое определение, касающееся работы электроэнергетической системы, основанное на указанном по меньшей мере одном измерении в режиме реального времени, при этом рабочая шина выполнена с возможностью передавать рабочие данные и не передавать данные событий, а шина событий выполнена с возможностью передавать данные событий и не передавать рабочие данные.
Известно интеллектуальное ядро системы (Патент RU 2541911 от 20.02.2015, МПК H02J 13/00), центр управления которой для повышения надежности и быстродействия при управлении энергосистемой, типа системы энергоснабжения, поддерживает связь с несколькими системами сбора и обработки данных учета и с несколькими терминальными системами. Центр управления энергосистемой содержит уровень шлюза и уровень ядра. Уровень шлюза включает несколько входных соединительных процедур для связи с каждой из нескольких систем-источников и несколько выходных соединительных процедур для связи с каждой из нескольких целевых систем. Уровень ядра содержит несколько адаптеров ядра, так что эти адаптеры ядра осуществляют взаимно-однозначную трансляцию связи от нескольких систем сбора и обработки данных учета, генерирующих команды, к нескольким терминальным системам.
Известен способ управления режимами электроэнергетической системы (Патент RU 2750260 от 25.06.2021, МПК H02J 3/06, G05B 13/02, H02J 3/24), направленный на управление режимами электроэнергетической системы (ЭЭС), которая содержит энергокластеры с группами объединенных станций и подстанций (ПС), центрами управления сетями (ЦУС) и автоматизированными системами управления технологическим процессом (АСУТП), а также линии электропередач между энергокластерами.
ЦУС энергокластеров ЭЭС оснащают устройствами сбора и хранения оперативных данных, поступающих с ПС от АСУТП в рамках соответствующих энергокластеров, и программно-техническими платформами с программными агентами мультиагентной системы (MAC). ЦУС объединяют между собой глобальной вычислительной сетью и обмениваются по ней сообщениями от MAC, с помощью которых определяют параметры распределенной оптимизации, отправляют с ЦУС команды для реализации оптимизированного режима обратно в АСУТП ПС в рамках своих энергокластеров.
В качестве программно-технических платформ ЦУС с программными агентами MAC используют дополнительные вычислительные устройства (ДВУ) на основе промышленных серверов.
В начале процесса управления режимами ЭЭС в каждом ДВУ для сбора информации запускают агенты MAC и рассчитывают оптимальный режим работы энергокластера, управляемого из данного ДВУ, оптимизируют агентами MAC режим внутри своего энергокластера и определяют граничные параметры напряжения и активной мощности для создания общего режима с другими энергокластерами на основе интересов собственника энергокластера.
Каждым ДВУ обнаруживают ДВУ смежных энергокластеров, связанных общими линиями электропередач с энергокластером данного ДВУ, причем управление режимом работы ЭЭС начинают всеми ДВУ одновременно и проводят в параллельном режиме.
С каждого ДВУ по глобальной вычислительной сети отправляют ДВУ смежных энергокластеров полученные в ходе расчета оптимального режима каждого энергокластера значения напряжений и параметры перетоков активной мощности по линиям электропередач между энергокластерами.
Каждым ДВУ от ДВУ смежных энергокластеров получают сообщения с ограничениями, наложенными по напряжению и параметрам перетока активной мощности по линиям электропередач и представленными для каждого ДВУ в виде целевой функции (ЦФ) потерь, обеспечивающей поддержание уровней граничных напряжений линий электропередач и перетоков активной мощности. С учетом этих ограничений, а также критериев, обусловленных бизнес-интересами, корректируют оптимизацию режима своего энергокластера, прекращают взаимодействие ДВУ друг с другом при совпадении уровней граничных напряжений линий электропередач смежных энергокластеров и параметров перетоков активной мощности, а также при учете интересов всех субъектов процесса оптимизации.
Недостатками указанных выше технических решений является большое число узлов, регулирующих процесс управления, а также большое число узлов, обменивающихся между собой информацией о вводимых ограничениях или управляющих воздействиях, что, в свою очередь, приводит к снижению общей надежности системы.
Раскрытие сущности изобретения
Техническая проблема - создание способа интеллектуального управления напряжением и реактивной мощностью энергосистемы для минимизации потерь в данной энергосистеме.
Технический результат - минимизация потерь в энергосистеме, повышение согласованности оптимизации режимов работы оборудования энергосистемы с одновременным повышением общей отказоустойчивости энергосистемы.
Техническая проблема решается, а технический результат достигается за счет того, что используют способ интеллектуального управления напряжением и реактивной мощностью энергосистемы, который включает установку централизованной координирующей системы (ЦКС) для сбора и обработки данных от узлов энергосистемы, а также формирования и передачи управляющих воздействий к узлам энергосистемы, содержащей соединенные каналами связи координирующую управляющую систему с базой данных и подсистему оптимального управления (ПОУ) напряжением и реактивной мощностью энергосистемы, и по меньшей мере одну децентрализованную узловую систему управления напряжением и реактивной мощностью (УСУНРМ), соединенную с ЦКС каналами связи для передачи данных, при этом координирующую управляющую систему выполняют с возможностью получения информации о состоянии энергосистемы, формирования среза данных по ней, передачи среза данных в ПОУ, получения перечня управляющих воздействий и уставок локальных регуляторов режимной автоматики от ПОУ и передачи управляющих воздействий и уставок в энергосистему в соответствии с требуемым временем их применения, ПОУ выполняют с возможностью оценки и обработки среза данных, сформированного координирующей управляющей системой, выбора на основе среза данных состава управляющих воздействий и уставок, формирования в базе данных для каждого управляющего воздействия выходного тэга, соответствующего номеру узла энергосистемы, на который направлено данное управляющее воздействие, и каждую децентрализованную УСУНРМ выполняют с возможностью расчета управляющих воздействий и уставок локальных регуляторов режимной автоматики для оптимального управления напряжением и реактивной мощностью узлов энергосистемы в реальном времени посредством передачи запросов и управляющих воздействий к узлам энергосистемы, а также автономной работы в случае исчезновения всех каналов связи с ЦКС.
Для обеспечения бесперебойной работы энергосистемы все каналы связи для передачи данных могут быть дублированы.
ЦКС также может включать имитационную подсистему (ИП), включающую серверное оборудование и выполненную с возможностью имитации реальной динамической энергосистемы для формирования предварительной базы данных и отработки общего взаимодействия узлов систему интеллектуального управления напряжением и реактивной мощностью энергосистемы. ЦКС предназначена для имитации реальной динамической энергосистемы, подмены собой ОИК, для формирования предварительной базы данных и отработки общего взаимодействия элементов интеллектуального управления напряжением и реактивной мощностью энергосистемы.
ЦКС и/или УСУНРМ предпочтительно включают автоматизированное рабочее место, выполненное с возможностью визуализации и контроля рабочего процесса пользователем.
Краткое описание чертежей
Далее изобретение подробно объясняется на примере его осуществления со ссылкой на прилагаемые фигуры.
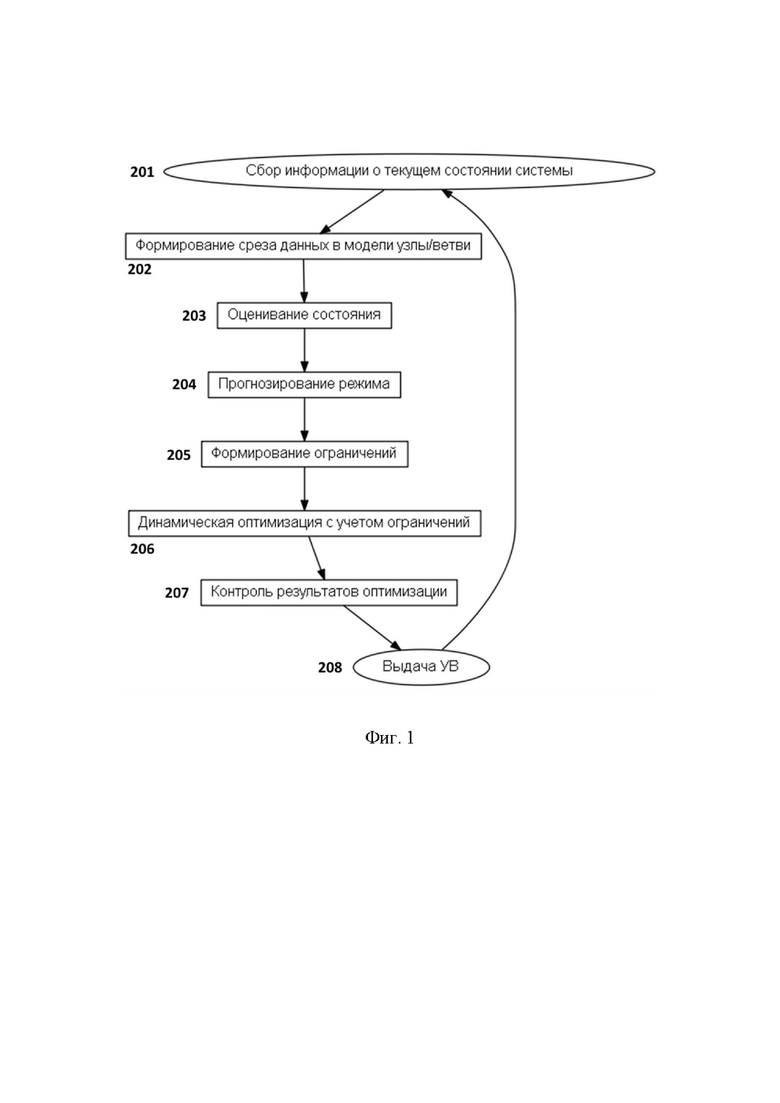
На фиг. 1 приведена общая блок-схема процесса управления напряжением и реактивной мощностью энергосистемы.
201 - сбор данных о текущем состоянии системы;
202 - формирование среза данных в модели узлы/ветви;
203 - оценивание состояния;
204 - прогнозирование режима;
205 - формирование ограничений;
206 - динамическая оптимизация с учетом ограничений;
207 - контроль результатов оптимизации;
208 - выдача управляющих воздействий.
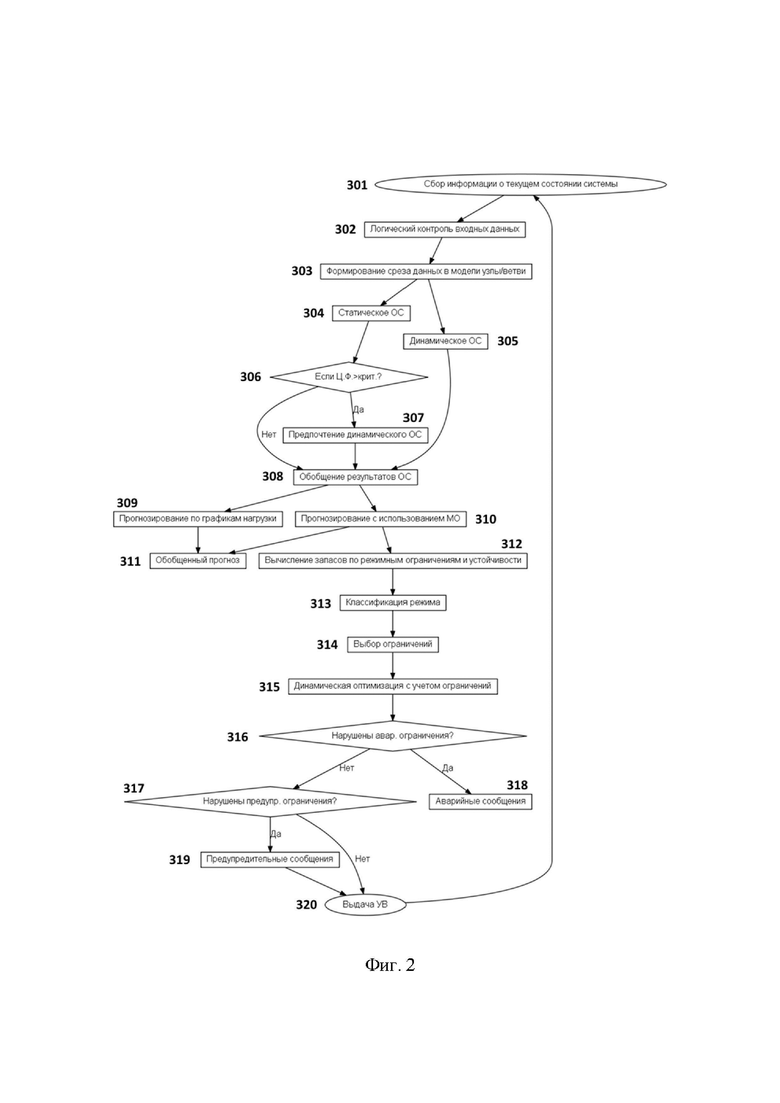
На фиг. 2 приведена блок-схема одного цикла работы подсистемы оптимального управления напряжением и реактивной мощностью энергосистемы.
301 - сбор данных о текущем состоянии системы;
302 - логический контроль входных данных;
303 - формирование среза данных в модели узлы/ветви;
304 - статическое оценивание состояния;
305 - динамическое оценивание состояния;
306 - сравнение целевой функции (фиг. 3) с критическим значением;
307 - предпочтение динамического оценивания состояния;
308 - обобщение результатов оценивания состояния;
309 - прогнозирование по графикам нагрузки;
310 - прогнозирование с использованием машинного обучения;
311 - обобщенный прогноз;
312 - вычисление запасов по режимным ограничениям и устойчивости;
313 - классификация режима;
314 - выбор ограничений;
315 - динамическая оптимизация с учетом ограничений;
316 - проверка нарушены ли аварийные ограничения;
317 - проверка нарушены ли предупредительные ограничения;
318 - аварийные сообщения;
319 - предупредительные сообщения;
320 - выдача управляющих воздействий.
На фиг. 3 представлен пример целевой функции ƒi(Xi).
Осуществление изобретения
Обобщенная структура способа интеллектуального управления напряжением и реактивной мощностью энергосистемы представлена в виде блок-схемы процесса управления напряжением и реактивной мощностью энергосистемы на фиг. 1. Способ включает применение централизованной координирующей системы (ЦКС), состоящей из сбора данных о текущем состоянии системы 201 (фиг. 1), включающего формирование среза данных в модели узлы/ветви 202 (фиг. 1), оценивание состояния 203 (фиг. 1), прогнозирование режима 204 (фиг. 1), формирование ограничений 205 (фиг. 1), обработку данных от узлов энергосистемы с использованием динамической оптимизации с учетом ограничений 206 (фиг. 1), контроля результатов оптимизации 207 (фиг. 1), а также выдачи управляющих воздействий 208 (фиг. 1), формирующей и передающей управляющие воздействия к узлам энергосистемы, содержащей соединенные каналами связи координирующую управляющую систему с базой данных и подсистему оптимального управления (ПОУ) (фиг. 2) напряжением и реактивной мощностью энергосистемы. Также способ включает применение по меньшей мере одной децентрализованной узловой системы управления напряжением и реактивной мощностью (УСУНРМ), соединенной с ЦКС каналами связи для передачи данных. Способ включает в себя серверное оборудование, выполненное с возможностью получения информации о состоянии энергосистемы, формирования среза данных по ней, передачи среза данных в ПОУ, получения перечня управляющих воздействий и уставок локальных регуляторов режимной автоматики от ПОУ и передачи управляющих воздействий и уставок в энергосистему в соответствии с требуемым временем их применения. ПОУ также включает серверное оборудование, выполненное с возможностью оценки и обработки среза данных, сформированного координирующей управляющей системой, выбора на основе сбора данных о текущем состоянии системы 301 (фиг. 2) с использованием логического контроля входных данных 302 (фиг. 2) состава управляющих воздействий и уставок, формирование среза данных в модели узлы/ветви 303 (фиг. 2), то есть формирования в базе данных для каждого управляющего воздействия выходного тэга, соответствующего номеру узла энергосистемы, на который направлено данное управляющее воздействие. На основе среза данных ПОУ выполняет как статическое оценивание состояния 304 (фиг. 2) энергосистемы, так и динамическое оценивание состояния 305 (фиг. 2) энергосистемы, далее выполняется сравнение целевой функции (фиг. 3) с критическим значением 306 (фиг. 2) и, если целевая функция (фиг. 3) меньше критического значения, то отдают предпочтение динамическому оцениванию состояния 307 (фиг. 2), если целевая функция (фиг. 3) больше критического значения, то используют обобщение результатов оценивания состояния 308 (фиг. 2), а затем выполняют прогнозирование как по графикам нагрузки 309 (фиг. 2), так и прогнозирование с использованием машинного обучения 310 (фиг. 2), далее получают обобщенный прогноз 311 (фиг. 2), а также выполняют вычисление запасов по режимным ограничениям и устойчивости 312 (фиг. 2), классификацию режима 313 (фиг. 2) и выбор ограничений 314 (фиг. 2). По полученным результатам выполняют динамическую оптимизацию с учетом ограничений 315 (фиг. 2) и проверку нарушения аварийных ограничений 316 (фиг. 2), если аварийные ограничения не нарушены выполняют проверку нарушены ли предупредительные ограничения 317 (фиг. 2), если аварийные ограничения нарушены, то ПОУ выдает аварийные сообщения 318 (фиг. 2), при этом если нарушены предупредительные ограничения, то ПОУ выдает предупредительные сообщения 319 (фиг. 2), далее на основании предупредительных сообщений 319 (фиг. 2) или отсутствии нарушений предупредительных ограничений ПОУ формирует выдачу управляющих воздействий 320 (фиг. 2).
Каждая децентрализованная УСУНРМ включает серверное оборудование и выполнена с возможностью расчета управляющих воздействий и уставок локальных регуляторов режимной автоматики для оптимального управления напряжением и реактивной мощностью узлов энергосистемы в реальном времени посредством передачи запросов и управляющих воздействий к узлам энергосистемы, а также автономной работы в случае исчезновения всех каналов связи с ЦКС. ЦКС также может включать имитационную подсистему (ИП), включающую серверное оборудование и выполненную с возможностью имитации реальной динамической энергосистемы для формирования предварительной базы данных и отработки общего взаимодействия узлов системы интеллектуального управления напряжением и реактивной мощностью энергосистемы.
ЦКС и/или УСУНРМ предпочтительно включают автоматизированное рабочее место, выполненное с возможностью визуализации и контроля рабочего процесса пользователем.
Передача данных осуществляется по любым известным для специалиста в данной области техники каналам связи, например, Ethernet каналам связи. Для обеспечения бесперебойной работы системы все каналы связи для передачи данных могут быть дублированы.
Подсистема оптимального управления (ПОУ) напряжением и реактивной мощностью энергосистемы предназначена для расчета управляющих воздействий и уставок локальных регуляторов режимной автоматики для оптимального управления напряжением и реактивной мощностью энергосистемы в реальном времени на основе данных телеметрии и циклического решения оптимизационных задач с учетом заданных ограничений и критериев оптимального (допустимого) управления.
В состав подсистемы оптимального управления напряжением и реактивной мощностью энергосистемы входит:
• Интеграционная платформа - система сбора и передачи данных (ССПД), обеспечивающая:
- получение данных телеизмерений, телесигналов (ТИ, ТС) о текущем состоянии энергосистемы по стандартному протоколу IEC 60870-5-104;
- выполнение алгоритмов оптимального управления;
- передачу управляющих воздействий в централизованную координирующую систему режимной автоматики, обеспечивающих оптимальное управление в соответствии с заданной целевой функцией;
- архивную базу данных для хранения: архивов данных о состоянии энергосистемы, рабочих данных подсистемы оптимального управления напряжением и реактивной мощностью.
- подсистему сообщений, обеспечивающую выдачу сообщений пользователю и протоколирование диагностических данных о работе системы;
• Базовая расчетная платформа;
• Система подготовки данных для расчета режимов;
• Оценивание состояния (расчет режимов по данным телеметрии);
• Расчет установившихся режимов;
• Оптимизация и ввод в допустимую область;
• Система машинного обучения;
• Система отображения.
Алгоритмы оптимального управления заключаются в циклическом выполнении следующих задач:
• Сбор данных текущем состоянии системы 201 (фиг. 1) и 301 (фиг. 2), таких как:
- телеизмерения;
- состояния коммутационных аппаратов;
- оперативное состояние локальных устройств управления;
- текущие значения уставок локальных устройств управления (уставки по напряжению, положения регуляторов под напряжением (РПН), величины индуктивностей управляемых шунтирующих реакторов (УШР));
• Оценивание состояния 203 (фиг. 1);
• Статическое оценивание состояния 304 (фиг. 2);
• Динамическое оценивание состояния 305 (фиг. 2), работающее на основе модификации фильтра Калмана;
• Прогнозирование режима 204 (фиг. 1);
• Формирование ограничений 205 (фиг. 1);
• Динамическая оптимизация режима с учетом ограничений 206 (фиг. 1) - минимизация активных потерь в электрической сети с учетом:
- режимных ограничений по напряжению и реактивной мощности;
- ограничений по запасам статической устойчивости, полученным на предыдущих шагах итерационного процесса;
- «стоимости» управляющих воздействий;
• Формирование управляющих воздействий по результатам оптимизации.
Выходная информация об управляющих воздействиях содержит требуемое время их отработки, а также время их действия, вытекающее из глубины прогнозирования.
Формирование среза данных в модели узлы/ветви 202 (фиг. 1) и 303 (фиг. 2) представляет собой процесс подготовки измерений, пригодных для моделирования режимов и оптимизации и состоит из:
• Получения текущих данных телеинформации и состояния сети;
• Получения архивных данных телеинформации и состояния сети (для процесса обучения и начального запуска прогнозирования);
• Логического контроля целостности получаемых данных;
• Формирования среза в модели узлы/ветви с помощью топологического процессора.
Для этого требуется привязка телеметрии к однолинейной схеме электрической сети.
Срез телеинформации представляет собой набор измерений и телесигналов о состоянии сети, взятый за определенное время. Одновременность времени определяется метками времени, присутствующими в каждом аналоговом измерении или измерении состояния коммутационного аппарата. Метка времени, как правило, передается от конечного цифрового измерительного устройства (цифрового преобразователя). В случае отсутствия фиксации метки времени на конечном измерительном устройстве метка времени назначается на ССПД или на локальном устройстве управления. Оперативно-информационный комплекс (ОИК) должен предоставлять данные ТИ и ТС с метками времени конечных устройств измерения.
Итоговые срезы данных ТИ и ТС формируются в подсистеме оптимального управления напряжением и реактивной мощностью. При этом в срезах данных ТИ и ТС присутствует погрешность измерений по времени. Это происходит вследствие задержек в тракте передачи данных ТИ и ТС на верхний уровень, определяемых быстродействием цифровых устройств сбора и передачи данных, каналов передачи данных, спорадичностью передачи данных.
В состав срезов данных ТИ и ТС также включается дополнительная информация, вносимая диспетчером через ОИК, такая как режим работы устройств локальной автоматики.
Состав срезов данных ТИ и ТС:
• Телеизмерения активной и реактивной (Р, Q) мощности по линиям электропередачи, в том числе линиям, отходящим к потребителю (питающим нагрузку).
• Измерения напряжения на шинах станций и подстанций.
• Состояния коммутационных аппаратов.
• Режим работы локальных устройств регулирования:
- ручное регулирование по номеру ступени;
- ручное регулирование по величине поперечной проводимости;
- автоматическое регулирование по напряжению;
- не в работе.
• Планируемое время нахождения устройства регулирования в данном режиме работы.
• Положения устройств управляющих аппаратов устройств регулирования (номер текущей отпайки РПН, номер текущей ступени регулирования компенсирующих устройств при ступенчатом регулировании).
• Величина уставки поперечной проводимости компенсирующих устройств (при непрерывном регулировании).
• Величина уставки по напряжению локальных устройств регулирования.
Получение текущих срезов данных ТИ и ТС
Получение текущих данных ТИ и ТС и состояния оборудования в подсистему оптимального управления осуществляется с помощью телекоммуникационного протокола МЭК 60870-5-104. При этом ССПД выступает в роли сервера данных (Slave), а подсистема оптимального управления выступает в роли клиента (Master).
Формирование и контроль полноты среза данных ТИ и ТС осуществляется на стороне подсистемы оптимального управления напряжением и реактивной мощностью.
Получение архивных срезов данных ТИ и ТС
Получение среза данных ТИ и ТС и состояния коммутационных аппаратов осуществляется через SQL-запрос к архивной базе данных ССПД.
Архивные срезы данных формируются на стороне ССПД. Состав срезов исходных данных аналогичен составу данных получаемых оперативно, за исключением того, что данные дополнены меткой времени среза. Метка времени среза, назначается единой для всех параметров среза и может отличаться от меток времени, полученных с устройств. Так, например, если формируется срез за время t, но некоторые данные не изменялись (например состояния коммутационных аппаратов) в течение времени θ, то метка времени, полученная с конечного устройства для этих данных будет t-θ. В срез для этих данных должна быть записана метка времени среза t. При этом метка времени устройства также должна присутствовать в срезе в виде отдельного поля.
Полученный срез данных проверяется на соблюдение следующих условий:
- Если по присоединению измеряется, как переток мощности, так и состояние коммутационного аппарата, то проверяется их соответствие.
- Если есть измерения перетоков мощности по всем присоединениям отходящих от шин, то сумма всех перетоков не должна превышать допустимого небаланса, заданного уставкой.
- При последовательном формировании срезов контролируется изменчивость данных. Между двумя последовательными срезами в пределах одного объекта должно быть хотя бы одно изменение в измерениях или состояниях.
- Наличие признаков недостоверности в исходных данных.
Для того чтобы актуализировать исходные данные для оценивания состояния необходимо сопоставить данные ТИ и ТС с расчетной моделью ПОУ. Такое сопоставление обеспечивается за счет «привязки» данных ТИ и ТС к расчетной модели (схеме).
Привязка осуществляется с графической схемы, представленной в ПОУ, и хранится соответственно в графической схеме. Такой подход позволяет не увеличивать размер расчетной модели до коммутационных схем. Таким образом, в результате «привязки» связываются элемент графической схемы с одним ТС и несколькими (по числу типов) ТИ. Например, ТС состояния выключателя, переток Р через выключатель, переток Q через выключатель. В качестве ТС и ТИ может выступать формула, задаваемая в ПОУ. Привязка осуществляется по уникальному идентификатору данных ТИ и ТС.
Преобразование ТИ и ТС до уровня модели осуществляется топологическим процессором.
Моделью энергосистемы узлы/ветви называют схему замещения электроэнергетической системы или сети, которая эквивалентна данной электрической схеме и адекватно отражает процессы, происходящие в ней. В схеме замещения реальные элементы сети (физические устройства) заменяются идеализированными элементами (активными сопротивлениями, емкостями, индуктивностями, идеальными трансформаторами, задающими токами и мощностями).
Оценивание состояния 203 (фиг. 1) заключается в получении такого установившегося режима, который был бы наиболее близок к имеющимся измерениям. Результатом работы задачи оценивания состояния является:
- Расчет всех параметров текущего режима (активных и реактивных мощностей нагрузки и генерации, модулей и фаз узловых напряжений, перетоков активных и реактивных мощностей) по данным ТИ и ТС о положении коммутационной аппаратуры;
- Расчет ретроспективных режимов на основе архива телеметрии в ССПД;
- Проверка достоверности всех параметров используемых в расчете режимов;
- Подготовка исходной модели для других задач комплекса (установившийся режим, оптимизация и др.).
Решение задачи оценивания состояния 203 (фиг. 1) проводится двумя методами: статическим и динамическим. Задача статического оценивания состояния решается независимо для каждого момента времени и позволяет получить сбалансированный установившийся режим для каждого среза измерений. Задача динамического оценивания состояния обновляет свое состояния при переходе от одного среза к другому, тем самым учитывая изменение режима работы ЭЭС во времени. Эти два метода оценивания состояния дополняют друг друга, взаимно верифицируя результаты оценивания.
Если результаты динамического оценивания состояния лучше результатов статического, то методами динамического оценивания состояния проводится краткосрочное прогнозирование режима.
Результаты краткосрочного прогнозирования режимов используются для оценивания состояния на следующих шагах по времени. Это позволяет выполнять оценивания состояния в случае пропадания или задержки в получении части измерений. Прогнозные измерения используются со значительно большей дисперсией чем измеренные. Величина изменения дисперсии спрогнозированных измерений настраивается при пуско-наладке системы.
В статическом оценивании состояния 304 (фиг. 2) используется метод взвешенных наименьших квадратов. На сегодняшний день такой подход является классической постановкой задачи оценивания состояния.
В блоке статического оценивания состояния (ОС) имеется функция предварительной отбраковки ошибочных измерений. Пользователь может выполнить расчет с применением такой функции или без нее. Программа отбраковывает только напряжения в узлах и перетоки в ветвях, а нагрузки и генерации алгоритмом отбраковкой не затрагиваются.
Программа ОС автоматически составляет группы ТИ, в которых с большей или меньшей точностью возможна проверка правильности баланса ТИ на основе законов Кирхгофа или взаимоувязка ТИ на основе законов контурных напряжений. Например, возможна проверка совпадения алгебраической суммы измерений перетоков мощности во всех подходящих к узлу ветвях и измеренной нагрузки узла; проверка совпадения замеров перетоков мощности в начале и в конце ветви с приближенным учетом потерь и емкостной генерации ветви; проверка совпадения замеров перетоков в параллельных ветвях и т.п. Такой подход известен как метод контрольных уравнений.
Далее, в зависимости от заданной точности ТИ, от величины небаланса и от заданного порога допустимости небаланса, все ТИ, входящие в данную балансную группу, могут быть признаны достоверными или сомнительными (а также могут быть введены промежуточные градации между достоверностью и сомнительностью). В случае сомнительности все входящие в такую группу измерения будут использованы в расчетах с пониженной точностью или полностью исключены из расчетов.
Однако определение таким способом достоверности или сомнительности ТИ не может быть в полной мере гарантированным. Например, в балансную группу могут попасть два ошибочных ТИ, имеющих приблизительно равную по величине, но противоположную по знаку ошибку, что обеспечит соблюдение баланса и ошибочные ТИ будут признаны достоверными. Или из-за ошибок коммутации баланс в группе ТИ может быть грубо нарушен и все ТИ этой группы будут признаны недостоверными.
Следует также отметить, что при существующих в настоящее время объемах ТИ в энергосистемах, в большинстве случаев, возможно, определить лишь только факт сомнительности группы ТИ. И очень мала возможность выявить конкретно, то ошибочное ТИ, из-за которого остальные, входящие в эту группу и возможно правильные ТИ, будут определены как сомнительные. В результате, большое количество достаточно точных ТИ, в несколько раз превышающих количество ошибочных ТИ, придется признать недостоверными и исключить из расчета.
Далее делается попытка «восстановить в правах» хотя бы часть ложно забракованных, но достаточно точных ТИ, а также дополнительно проверить ТИ, признанные достоверными. С этой целью выполняется расчет по основному алгоритму ОС. Сомнительные ТИ, достаточно хорошо совпадающие со своими расчетными значениями, вновь признаются достоверными, а грубо несовпадающие со своими расчетными значениями ТИ признаются ошибочными. Далее, с учетом выявленных ошибочных ТИ, снова работает алгоритм предварительной отбраковки "плохих" ТИ и снова выполняется расчет по основному алгоритму ОС. И так выполняется несколько итераций. В результате сокращается количество ложно забракованных ТИ и повышается надежность отбраковки действительно ошибочных ТИ.
Статический алгоритм отбраковки ошибочных измерений является предварительным алгоритмом отбраковки. Далее он дополняется динамическим алгоритмом отбраковки ошибочных измерений, основанным на результатах динамического оценивания состояния.
В качестве измерений в программе ОС предусмотрено задание напряжений в узлах сети, активной и реактивной мощностей нагрузок и генераций в узлах, активной и реактивной мощностей перетоков в ветвях схемы. Значения параметров, источником которых не являются непосредственно измерительные устройства, обычно называются псевдоизмерениями. Каждое такое измерение задается тремя параметрами: признаком измерения, измеренной величиной и точностью.
Признаки измерений задаются на этапе пуско-наладки системы. В дальнейшем они могут корректироваться в ходе ее эксплуатации.
В качестве точности измерения задается дисперсия измерения. Следует учитывать, что точность измерения, полученного от устройств ТМ, определяется суммарной погрешностью всего измерительного тракта.
Для большей очевидности в качестве точности могут быть заданы среднеквадратичные отклонения. Это отразится только на величине целевой функции. При этом важно, чтобы по всем измерениям использовался один подход к заданию точности измерений (или дисперсия или среднеквадратичное отклонение).
Относительное отклонение θi расчетного значения параметра i от его измеренной величины вычисляется по формуле:

 - измеренные параметры режима,
- измеренные параметры режима,
v(x) - вычисленные параметры режима по значениям вектора состояния системы х,
σi - дисперсия измерения.
Относительное отклонение - безразмерная относительная величина. Для нагрузок и генераций узлов θi со знаком "+" означает наличие в узле избыточной мощности в сравнении с измеренной или статистически рассчитанной величиной, со знаком "-" - недостаточной.
Практическая полезность относительного отклонения в том, что оно характеризует степень, грубость нарушения измеренной величины независимо от абсолютного значения этого нарушения и от заданной точности, т.е. величина относительного отклонения является инвариантным показателем относительно указанных величин. Для группы связанных узлов, для отдельных участков схемы сети θi показывает, как правило, общую для группы узлов тенденцию к избытку или недостатку мощности, обусловленную измерениями перетоков мощности в ветвях по границам этой группы узлов и их суммарной нагрузкой и генерацией.
Для большей информативности и наглядности величина тенденции к избытку или недостатку мощности вычисляется также и для узлов, в которых нет нагрузки или генерации и отображается также в форме относительного отклонения.
Важной величиной при анализе оценивания состояния является суммарное относительное отклонение, вычисляемое как сумма по всем измерениям по следующей формуле:

 - измеренные параметры режима,
- измеренные параметры режима,
v(x) - вычисленные параметры режима по значениям вектора состояния системы х,
σi - дисперсия измерения.
Узлы, в которых нет измерения, не участвуют в расчете суммарного отклонения (хотя для них и вычисляется относительное отклонение).
Также в расчете суммарного отклонения не участвуют забракованные измерения, измерения балансирующих узлов, измерения в отключенных линиях.
Динамическое оценивание состояния 305 (фиг. 2)
Задача динамического оценивания состояния решается с использованием фильтра Калмана. Для прогнозирования слабоизменчивых компонент вектора состояния системы x на короткий промежуток времени используется динамическое ОС на базе модификации фильтра Калмана. Время упреждения может быть от нескольких секунд (интервал между получением данных измерений (среза) в момент времени k и в момент времени k+1) до 1 мин.
Фильтр Калмана является классическим методом динамического оценивания состояния.
Выявление ошибочных измерений в процессе динамического оценивания состояния выполняется следующим образом. На первом этапе выявляются измерения, значения которых изменились относительно текущей оценки или измеренного значения на предыдущем шаге времени на величину больше определенного порога, вычисляемого пропорционально дисперсии измерения:


 - измеренные параметры режима,
- измеренные параметры режима,
v(x) - вычисленные параметры режима по значениям вектора состояния системы х,
d - пороговое значение параметра режима.
Среди сильно изменившихся измерений выявляются те, которые также отклоняются от прогнозного значения этого измерения:

Блок динамического оценивания состояния не требует ввода дополнительных исходных данных сверх тех, что задаются для статического оценивания состояния. Однако, для того чтобы динамическое оценивание состояния начало выдавать адекватные результаты требуется время для накопления статистики. При наличии архивной базы данных возможно накопление статистики, используя ретроспективную информацию из нее.
Для контроля за работой алгоритма оценивания состояния предусмотрена выдача пользовательских сообщений. Для обобщенного контроля за работой блока оценивания состояния используются значения суммарной относительной ошибки (СО.) алгоритмов статического и динамического оценивания состояния.
Прогнозирование режима 204 (фиг. 1), прогнозирование по графикам нагрузки 309 (фиг. 2), прогнозирование с использованием машинного обучения 310 (фиг. 2), обобщенный прогноз 311 (фиг. 2):
Прогнозирование режимов выполняется комбинированным алгоритмом, использующим прогнозирование по графикам нагрузки 309 (фиг. 2) и с использованием машинного обучения 310 (фиг. 2) с использованием искусственных нейронных сетей.
Входными значениями алгоритма прогнозирования для каждого рассматриваемого момента времени являются замеренные значения напряжений в узлах электрической сети, перетоки активной и реактивной мощности в ветвях и измерения инъекций активной и реактивной мощности в узлах (нагрузка и генерация). Также при наличии векторных измерений в исходных данных могут присутствовать замеренные углы напряжений. Вектор входных измерений может быть отсортирован в соответствии с оптимальным с точки зрения сходимости порядком узлов или быть неупорядоченным. Архивная база данных исходных данных для прогнозирования режима заполняется ПОУ.
Кроме архивных данных измерений, преобразованных в модель узлы/ветви, для работы алгоритма прогнозирования требуется информация о дисперсиях измерений. Данная информация подготавливается в процессе пуско-наладки блока оценивания состояния.
Для контроля за работой алгоритма прогнозирования предусмотрена выдача следующей информации и диагностических сообщений:
- Прогнозный режим (на схеме и в таблицах).
- Величины относительных отклонений измерений (на схеме и в таблицах).
- Величины дисперсий измерений (на схеме и в таблицах).
- Обобщенный показатель качества уточненного прогноза (суммарное среднеквадратичное отклонение).
- При долговременном ухудшении качества уточненного прогноза выдается аварийное сообщение.
- Формирование ограничений (205)
- Режимные ограничения являются входными данными для алгоритма оптимального управления напряжением и реактивной мощностью. В качестве режимных ограничений выступают:
- Ограничения по уровню напряжения в узлах электрической сети (минимальные и максимальные);
- Ограничения на инъекцию реактивной мощности в узлах электрической сети, представляющих собой генераторы и компенсирующие устройства;
- Ограничения по току в ветвях модели узлы/ветви, соответствующие токовым ограничениям по высоковольтным линиям и трансформаторам;
- Ограничения по перетоку мощности в ветвях модели узлы/ветви, соответствующие ограничениям по мощности высоковольтных линий и трансформаторов.
Режимные ограничения задаются при пуско-наладке системы, а также корректируются в процессе ее эксплуатации оперативным персоналом.
Возможно уточнение ограничений в сторону большей надежности автоматическим алгоритмом анализа запасов по статической устойчивости и режимным ограничениям алгоритмом утяжеления.
Важной особенностью режимных ограничений является их соответствие режиму работы ЭЭС (нормальный, ремонтный, аварийный, послеаварийный, вынужденный и т.п.).
Под статической устойчивостью понимается возможность синхронной работы синхронных электрических генераторов и синхронных двигателей ЭЭС при медленных изменениях нагрузки. Задача расчета статической устойчивости оценить на основе циклических расчетов установившихся режимов (УР). Критерием нарушения статической устойчивости является отсутствие сходимости УР после постепенного утяжеления режима. Для нахождения предельного режима методом утяжеления задается траектория утяжеления, т.е. список узлов, в которых изменяется генерация и нагрузка и начальный шаг изменения для каждого узла. Поскольку основной задачей способа является получение оптимального режима, то траектория утяжеления может быть получена автоматически на основе разницы между оптимальным и исходным режимом. Двигаясь дальше по данной траектории методом утяжеления, получают предельный режим, как по статической устойчивости, так и по режимным или технологическим ограничениям.
Классификация режима работы ЭЭС может быть выполнена с помощью формальных логических правил, как путем анализа единичных режимов, так и путем анализа последовательных режимов методом конечных автоматов. Формальные правила классификации режимов задаются в процессе пуско-наладки подсистемы оптимального управления.
Большая универсальность в классификации достигается применением методов машинного обучения, таких как деревья принятия решений и более обобщенный вариант деревьев принятия решений методом «случайного леса». Важным преимуществом деревьев принятия решений является то, что они не просто относят режим к тому или иному классу, но и позволяют численно обосновать классификацию режима. Дерево принятия решений - это дерево, листья которого соответствуют значениям целевой функции, а в остальных узлах - условия перехода, определяющие по какому из ребер узла проходить алгоритму.
Динамическая оптимизация с учетом ограничений 206 (фиг. 1) и 315 (фиг. 2) используется для получения оптимальных управляющих воздействий на заданную глубину используется алгоритм динамической оптимизации.
Исходными данными для динамической оптимизации являются:
- Текущий оцененный режим.
- Прогноз в виде набора спрогнозированных режимов.
- Список возможных управляющих воздействий (УВ).
- Состояния УВ.
Прогнозные состояния системы за рассматриваемый диапазон времени представляют собой множество:

Xi - вектор состояния системы в каждый момент времени.
В предлагаемом решении учитывается стоимость управляющих воздействий, зависящая не только от вектора состояния системы, но и от времени. В результате оптимизации весь рассматриваемый временной диапазон распадается на несколько поддиапазонов, на каждом из которых находится оптимальное для данного поддиапазона решение. Полная целевая функция задачи оптимизации может быть записана, как:

 - вектор оптимальных управляющих параметров на поддиапазоне;
- вектор оптимальных управляющих параметров на поддиапазоне;
bp и ep - индексы начала и конца поддиапазона во временном срезе;
С - функция стоимости воздействий, зависящая от стоимости каждого конкретного воздействия с учетом времени, задаваемого индексом i;
ξ0 принимается равным начальному значению управляющих параметров Х0.
ƒi - целевая функция каждой подзадачи оптимизации, включающая:
- потери активной мощности;
- отклонения от допустимых диапазонов по напряжению;
- нарушения режимных ограничений.
Стоимость управления С тем или иным оборудованием зависит от таких факторов, как:
- остаточный ресурс оборудования;
- приоритет использования УВ;
- минимально допустимое время между коммутациями одним и тем же устройством.
Такая постановка задачи динамической оптимизации позволяет получить оптимальное значение за весь рассматриваемый период времени. Поиск глобального оптимума на всем прогнозном диапазоне осуществляется с учетом стоимости УВ, учитываемой в общей целевой функции.
Целевая функция ƒi(Xi), используемая в статической оптимизации предполагается выпуклой. Невыпуклая целевая функция в задаче оптимизации режимов может заменяется на двойственную ей выпуклую функцию.
Множество решений локальной оптимизации minƒi(Xi) ограничивают снизу решения общей задачи оптимизации с целевой функцией на всем временном диапазоне. На примере выпуклой функции в разрезе одного управляющего параметра для двух точек временного диапазона: если xd - значение управляющего параметра для оптимальной точки всего представленного диапазона, то значение целевой функции в этой точке заведомо выше значения целевой функции в точках локального оптимума (xl, х2).
Используя это свойство, определяются и максимально ограничиваются области поиска оптимальных решений для всего временного диапазона. В каждом расчете статической оптимизации определяются измерения, которые влияют на целевую функцию:

Xξ - значение управляющих параметров;
x - значения вектора состояния системы.
Данная область представляет собой многомерный куб с числом измерений большим на единицу, чем количество параметров, которые изменялись в процессе оптимизации единичных моментов времени и ограниченный пределами, в которых эти параметры изменялись. На практике такая область получается небольшой, так как для близких по времени режимов, как правило, получаются близкие оптимальные управляющие воздействия.
Для поиска глобальных оптимумов и их количества на всем временном диапазоне применяется алгоритм имитации отжига. Это тем более оправдано для случая дискретных управляющих воздействий.
Начальным приближением для алгоритма имитации отжига являются решения задачи локальной оптимизации, входящие в область поиска решений. Алгоритмом имитации отжига решается следующая оптимизационная задача:

ξd - вектор оптимальных управляющих параметров на поддиапазоне;
bp и ер - индексы начала и конца поддиапазона во временном срезе;
С - функция стоимости воздействий зависящая от стоимости каждого конкретного воздействия с учетом времени, задаваемого индексом i;
ƒi - целевая функция каждой подзадачи оптимизации, включающая:
- потери активной мощности;
- отклонения от допустимых диапазонов по напряжению;
- нарушения режимных ограничений.
Для поиска оптимального значения непрерывных управляющих величин, таких, как инъекции активной и реактивной мощности в узлах графа электрической сети, предлагается использовать гибридный метод имитации отжига для непрерывных величин и метод градиентного спуска.
Статическая оптимизация
Задача статической оптимизации режима, решаемая для каждого режима в процессе динамической оптимизации в общем виде может быть записана следующим образом:

целевая функция ƒ(⋅) формулируется, как:

управляющие параметры оптимизации ug, kt, yc - напряжения в балансирующих по реактивной мощности узлах, коэффициенты трансформации и проводимости компенсаторов соответственно;
В - множество ветвей;
N - множество узлов.
Приоритет учета и масштабирование параметров целевой функции задаются константами: cΔP - константа масштабирующая учет потерь, cU - константа масштабирующая учет отклонения напряжений в узлах.
Ограничения на управляющие параметры представляют собой простые границы допустимых значений:



ug, kt, gc - управляющие параметры оптимизации;
G ∪ Cu - множество генераторных узлов участвующих в оптимизации и компенсаторов, регулирующих напряжение;
T - множество трансформаторных ветвей, участвующих в оптимизации;
С - множество узлов с компенсаторами, регулирующими напряжение.
Зависимые параметры Δp (потери в ветвях) и Δu (отклонения напряжения в узлах) вычисляются из уравнений электрической сети:

s - вектор независимых параметров: мощностей Р, Q в нагрузочных узлах; мощности P и напряжения U в узлах балансирующих по реактивной мощности; напряжения U и фаза d в узлах балансирующих одновременно по P и Q.
U и u - матрица и вектор составляющих комплексов напряжений;
Y и yb - матрица и вектор комплексов проводимостей;
ub - напряжение базисного узла.
В качестве метода поиска локального оптимума используется метод, основанный на алгоритме L-BFGS-B. Данный метод является квазиньютоновским методом, учитывающим ограничения на управляющие параметры.
Ограничения на управляющие параметры учитываются в виде граничных условий:

x - значения вектора состояния системы;
l и u - ограничения управляющего параметра.
Учет ограничений на зависимые параметры режима выполняется в виде барьерных функций, значения которых войдут в общую целевую функцию оптимизации и вычисляются в процессе расчета потокораспределения на каждой итерации оптимизации при фиксированных значениях управляющих параметров. В качестве барьерных функций используются логарифмические функции по аналогии с методом внутренней точки:

F(x) - барьерная функция;
gi(x)≤ 0, i=1, …, m;
m - количество ограничений на зависимые параметры режима.
Такой подход позволяет разделить задачу оптимизации на расчет потокораспределения и собственно задачу оптимизации, что с одной стороны упрощается алгоритм оптимизации, с другой стороны в рамках процедуры расчета установившегося режима можно учитывать сложные модели элементов сети и модели автоматических систем управления.
В результате алгоритм поиска локального оптимума методом L-BFGS-B следующий:
1. На каждом шаге итерационного процесса мы имеем xk - управляющий вектор, ƒ(xk) - значение целевой функции, gk - градиент целевой функции в точке xk.
2. Для учета ограничений вида l≤x≤u используется метод проекции градиента.
3. Квадратичная модель функции ƒ записывается следующим образом:

Bk - аппроксимация матрицы Гессе, полученная квазиньютоновским алгоритмом L-BFGS.
Далее определяется кусочно-линейная функция, совпадающая по направлению с антиградиентом и учитывающая ограничения:


x - значения вектора состояния системы;
l и u - ограничения управляющего параметра.
После этого вычисляется локальный минимум (точка Коши) модельной функции по выбранному кусочно-линейному направлению:

mk(х) - квадратичная модель функции ƒ;
Итерационный процесс продолжается до тех пор, пока изменение управляющего вектора вдоль направления оптимизации больше допустимой погрешности вычислений:

x - значения вектора состояния системы;
ε - допустимая погрешность вычислений.
При движении по траектории оптимизации возможны ситуации, когда режим не сходится, в том числе из-за учета ограничений при расчете потокораспределения. В этом случае необходимо найти предельный режим вдоль данной траектории, при котором обеспечивается сходимость установившегося режима и зафиксировать новые ограничения.
Движение вдоль траектории осуществляется методом деления пополам приращений вектора управляющих воздействий. Квадратичная модель в этом случае записывается, как:

Bk - аппроксимация матрицы Гессе, полученная квазиньютоновском алгоритмом L-BFGS;
 α - кратность деления шага.
α - кратность деления шага.
Для контроля результатов оптимизации 207 (фиг. 1), проверки нарушения аварийных ограничений 316 (фиг. 2), проверки нарушения предупредительных ограничений 317 (фиг. 2), аварийных сообщений 318 (фиг. 2), предупредительных сообщений 319 (фиг. 2) за работой алгоритма оптимизации предусмотрена выдача следующей информации:
• Резюме по итоговому режиму оптимизации:
- Величина целевой функции до оптимизации и после;
- Величина потерь до и после оптимизации;
- Нарушения границ напряжения до и после оптимизации.
• Резюме по результату статической оптимизации по каждому прогнозному режиму:
- Величина целевой функции до оптимизации и после;
- Величина потерь до и после оптимизации;
- Нарушения границ напряжения до и после оптимизации.
• Перечень управляющих воздействий в результате статической оптимизации по каждому режиму.
• Перечень управляющих воздействий в результате динамической оптимизации с временем их применения.
Результаты работы системы по выдаче управляющих воздействий 208 (фиг. 1) и 320 (фиг. 2)
Система оптимального управления напряжением и реактивной мощностью выдает задания ССПД, содержащие:
• Ограничения в виде границы по напряжению (максимального и минимального) для каждого локального регулятора:
- Каждое ограничение может содержать несколько точек измерения напряжения, соответствующих точкам сети, в которых контролируется напряжение локальным регулятором.
- Для каждого ограничения задается время его действия.
- Ограничения иерархичны. Если заканчивается время действия ограничения, то вступает в действие ограничение более высокого уровня. При этом должно контролироваться, то, что ограничения не противоречивы, как по значениям, так и по времени. На самом верхнем уровне иерархии границ (корневом элементе иерархии) находятся базовые границы с бесконечным временем действия.
• Задание на управление для каждого локального регулятора с требуемым временем его отработки. Задания могут быть следующих типов:
- Величина требуемого напряжения в точках сети, в которых контролируется напряжение локальным регулятором.
- Номер отпайки РПН и соответствующий коэффициент трансформации.
- Требуемую величину индуктивности УШР.
- Для контроля работы системы оптимального управления напряжением и реактивной мощностью со стороны оператора на рабочей станции в оперативном режиме отображается следующая информация.
• Результаты прогноза на определенную глубину:
- Оцененная ошибка прогноза;
- Наибольшие отличия спрогнозированного режима от текущего
режима;
- Прогнозируемый режим (на схеме и в таблицах).
• Результаты оптимизации:
- Оптимальный режим (на схеме и в таблицах);
- Отличия целевой функции в исходном и начальном режиме;
- Управляющие воздействия, соответствующие данному оптимальному режиму.
• Статистика по остаточному ресурсу управляющих устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ интеллектуального управления нагрузкой в изолированных энергосистемах в аварийных режимах и устройство для его осуществления | 2022 |
|
RU2812195C1 |
| Способ оценивания режимных параметров энергосистемы с использованием уравнений балансов мощности или энергии | 2019 |
|
RU2734319C1 |
| СИСТЕМА МОНИТОРИНГА ЗАПАСОВ УСТОЙЧИВОСТИ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ | 2013 |
|
RU2547224C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ ЖЕЛЕЗНЫХ ДОРОГ | 2015 |
|
RU2587128C1 |
| Система автоматического противоаварийного управления нагрузкой в изолированно работающей энергетической системе | 2020 |
|
RU2723544C1 |
| Способ регулирования режимов электрических сетей энергообъединения | 1983 |
|
SU1274070A1 |
| Способ автоматического определения крутизны частотной характеристики изолированно работающего энергообъединения | 2020 |
|
RU2722642C1 |
| Способ противоаварийного управления режимом параллельной работы синхронных генераторов и делительной автоматики в электрических сетях | 2018 |
|
RU2692054C1 |
| СПОСОБ СТАБИЛИЗАЦИИ РАБОТЫ ТУРБОГЕНЕРАТОРА В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2016460C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ ПЕРЕТОКА МОЩНОСТИ МЕЖСИСТЕМНОЙ ЭЛЕКТРОПЕРЕДАЧИ | 1991 |
|
RU2023337C1 |

Использование: в области электроэнергетики. Технический результат - минимизация потерь в энергосистеме, повышение оптимизации режимов работы оборудования энергосистемы с одновременным повышением общей отказоустойчивости энергосистемы. Способ включает установку централизованной координирующей системы (ЦКС), которая содержит соединенные каналами связи координирующую управляющую систему с базой данных и подсистему оптимального управления напряжением и реактивной мощностью энергосистемы (ПОУ), и по меньшей мере одну децентрализованную узловую систему управления напряжением и реактивной мощностью (УСУНРМ), соединенную с ЦКС каналами связи для передачи данных. Координирующая управляющая система получает информацию о состоянии энергосистемы, формирует срез данных по ней и передает его в ПОУ, получает перечень управляющих воздействий и уставок локальных регуляторов режимной автоматики от ПОУ и передает их в энергосистему в соответствии с требуемым временем их применения. ПОУ оценивает и обрабатывает срез данных, выбирает состав управляющих воздействий и уставок, формирует для каждого управляющего воздействия выходной тэга, соответствующего номеру узла энергосистемы, на который направлено управляющее воздействие. Каждая децентрализованная УСУНРМ рассчитывает управляющие воздействия и уставки локальных регуляторов режимной автоматики в режиме автономной работы в случае исчезновения всех каналов связи с ЦКС. 4 з.п. ф-лы, 3 ил.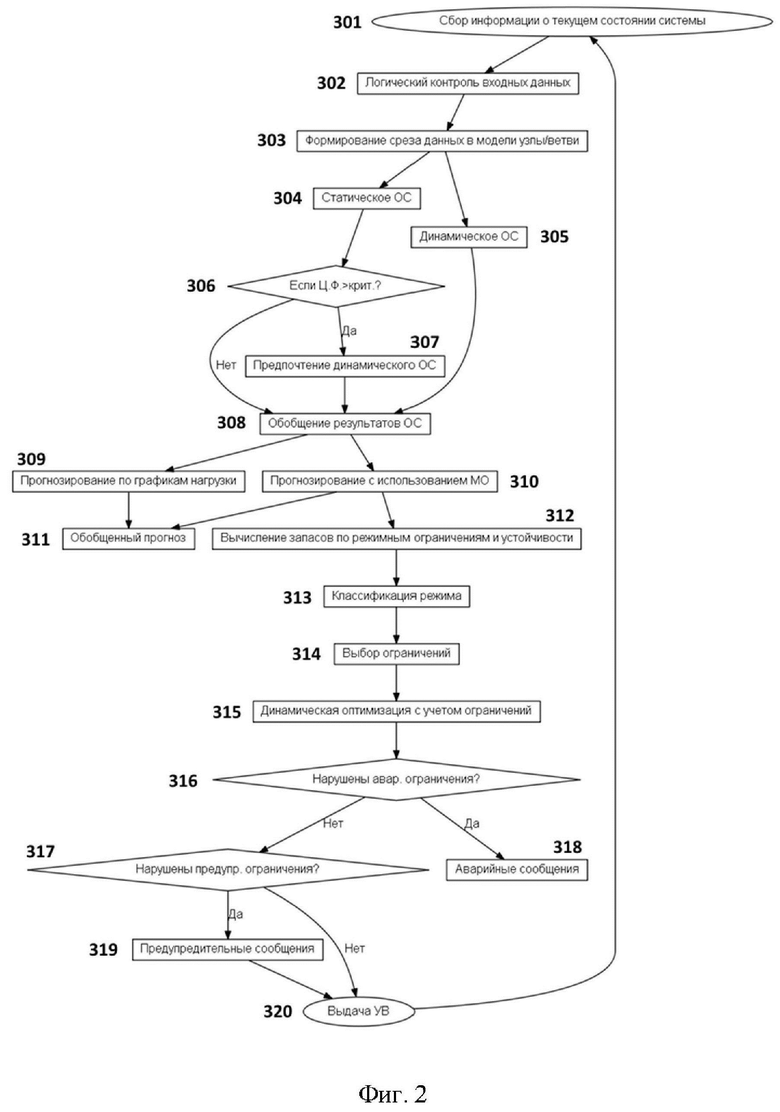
1. Способ интеллектуального управления напряжением и реактивной мощностью энергосистемы, включающий установку централизованной координирующей системы (ЦКС) для сбора и обработки данных от узлов энергосистемы, а также формирования и передачи управляющих воздействий к узлам энергосистемы, содержащей соединенные каналами связи координирующую управляющую систему с базой данных и подсистему оптимального управления (ПОУ) напряжением и реактивной мощностью энергосистемы, и по меньшей мере одну децентрализованную узловую систему управления напряжением и реактивной мощностью (УСУНРМ), соединенную с ЦКС каналами связи для передачи данных, при этом координирующую управляющую систему выполняют с возможностью получения информации о состоянии энергосистемы, формирования среза данных по ней, передачи среза данных в ПОУ, получения перечня управляющих воздействий и уставок локальных регуляторов режимной автоматики от ПОУ и передачи управляющих воздействий и уставок в энергосистему в соответствии с требуемым временем их применения, ПОУ выполняют с возможностью оценки и обработки среза данных, сформированного координирующей управляющей системой, выбора на основе среза данных состава управляющих воздействий и уставок, формирования в базе данных для каждого управляющего воздействия выходного тэга, соответствующего номеру узла энергосистемы, на который направлено данное управляющее воздействие, и каждую децентрализованную УСУНРМ выполняют с возможностью расчета управляющих воздействий и уставок локальных регуляторов режимной автоматики для оптимального управления напряжением и реактивной мощностью узлов энергосистемы в реальном времени посредством передачи запросов и управляющих воздействий к узлам энергосистемы, а также автономной работы в случае исчезновения всех каналов связи с ЦКС.
2. Способ по п.1, отличающийся тем, что каналы связи для передачи данных дублированы.
3. Способ по п.1, отличающийся тем, что централизованная координирующая система включает имитационную подсистему, включающую серверное оборудование и выполненную с возможностью имитации реальной динамической энергосистемы для формирования предварительной базы данных и отработки общего взаимодействия узлов системы интеллектуального управления напряжением и реактивной мощностью энергосистемы.
4. Способ по п.1, отличающийся тем, что централизованная координирующая система включает автоматизированное рабочее место, выполненное с возможностью визуализации и контроля рабочего процесса пользователем.
5. Способ по п.1, отличающийся тем, что узловая система управления напряжением и реактивной мощностью включает автоматизированное рабочее место, выполненное с возможностью визуализации и контроля рабочего процесса пользователем.
| Способ управления режимами электроэнергетической системы | 2020 |
|
RU2750260C1 |
| СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ | 2009 |
|
RU2518178C2 |
| ИНТЕЛЛЕКТУАЛЬНОЕ ЯДРО СИСТЕМЫ | 2011 |
|
RU2541911C2 |
| WO 2009042581 A1, 02.04.2009 | |||
| US 6624532 B1, 23.09.2003. | |||

