Предшествующий уровень техники настоящего изобретения
Настоящее изобретение в целом относится к устройству измерения.
В уровне техники было предложено несколько методик измерения толщины плавающего нефтепродукта (нефти). Большинство из существующих методик, используемых для обнаружения нефтепродукта (нефти) и оценки его (ее) толщины, являются слишком дорогостоящими, неточными, дают общую оценку толщины в пределах некоторой области, подвержены влиянию условий окружающей среды или не обеспечивают возможностей постоянного мониторинга.
Методики, используемые для оценки/обнаружения нефтепродукта (нефти), могут быть разделены на два типа: удаленное измерение или измерение на основе непосредственного контакта. К методикам удаленного измерения относятся визуальные способы, в ходе которых эксперт предоставляет оценку толщины пятна исходя из его цвета. Эта методика дополняется гиперспектральными, радиолокационными и тепловизионными изображениями, полученными с воздушных судов или спутников. Эти методики хорошо подходят для обеспечения относительно глобальной оценки толщины, при этом они подвержены сильному влиянию освещения и атмосферных условий, являются дорогостоящими или не могут проводиться непрерывно. С другой стороны, способы на основе непосредственного контакта предназначены для осуществления локальных и непрерывных измерений толщины. Эти способы предусматривают более традиционные подходы с использованием контрольно-измерительных приборов, такие как подход на основе показателей электропроводности, показателей емкости, матрицы оптических датчиков, электромагнитных показателей и визуальных показателей. Однако датчикам, применяемым в этой области техники, по-прежнему присущи недостатки, такие как неточность измерения, чувствительность к условиям освещения, типу нефтепродукта (нефти), условиям окружающей среды, загрязнению и условиям волнения. Существует очень мало коммерческих датчиков, при этом большинство из них предназначены для простого обнаружения утечек или для работы в закрытых контейнерах, а не для измерения толщины нефтепродукта (нефти) на открытой воде, особенно когда датчик не является стационарным. Таким образом, целью настоящего изобретения является решение вышеуказанных и других проблем.
Краткое раскрытие настоящего изобретения
В настоящем документе раскрываются системы, способы и устройства для измерения толщины на основе емкостной матрицы. Способы, системы и устройства частично изложены в нижеследующем описании, а частично будут очевидны из описания или могут быть изучены при практическом применении способов, устройств и систем. Преимущества способов, устройств и систем будут реализованы и достигнуты посредством признаков и комбинаций, которые конкретно указаны в прилагаемой формуле изобретения. Следует понимать, что как изложенное выше общее описание, так и последующее подробное описание являются лишь иллюстративными и пояснительными и не ограничивают заявленные способы, устройства и системы.
Краткое описание фигур
На прилагаемых фигурах одинаковые элементы обозначены одинаковыми позициями среди нескольких предпочтительных вариантов осуществления настоящего изобретения.
На фиг. 1А представлен вид сверху одного варианта осуществления устройства измерения толщины (базовая конструкция - без штырей). На фиг. 1В представлена схема подключения устройства, показанного на фиг. 1А. На фиг. 1C представлено изображение блока обработки данных и связи, входящего в состав устройства измерения толщины. На фиг. 1D представлен вид сбоку одного варианта осуществления конструкции датчика со штырями.
На фиг. 2А представлен схематический вид сбоку пространства между полосами для обнаружения толщины слоя нефтепродукта на поверхности воды. На фиг. 2В представлен схематический вид сбоку улучшенной конструкции датчика со штырями. На фиг. 2С представлено изображение реализованного прототипа улучшенной конструкции датчика со штырями. На фиг. 2D показан готовый чувствительный блок с водонепроницаемой оболочкой. На фиг. 2Е представлена Таблица I, в которой представлены относительные отличия электродов датчика. На фиг. 2F представлен график, показывающий относительные отличия от калибровки. На фиг. 2G представлен график, показывающий отношения между электродами. На фиг. 2Н представлена блок-схема алгоритма в соответствии с одним вариантом осуществления. На фиг. 2I представлено схематическое изображение, иллюстрирующее различные положения вертикальной емкостной матрицы.
На фиг. 3А представлен схематический вид сбоку конструкции емкостного датчика; на фиг. 3В представлен схематический вид снизу дорожек конструкции емкостного датчика; и на фиг. 3С представлен схематический вид сверху электрода конструкции емкостного датчика.
На фиг. 4 представлен вид в перспективе одного варианта осуществления коммутационной платы MPR121.
На фиг. 5 представлен график для варианта осуществления цикла измерения напряжения MPR121.
На фиг. 6 представлена схема цепи управления емкостного датчика.
На фиг. 7А представлен вид сверху цепи емкостного контроллера, а также модулей глобальной системы позиционирования (GPS) и беспроводной связи; на фиг. 7В представлен вид сверху емкостного датчика и электродов; на фиг. 7С представлен вид снизу емкостного датчика и дорожек; и на фиг. 7D представлен общий вид печатной платы емкостного датчика.
На фиг. 8 представлен график эксперимента 1 для датчика в воздухе.
На фиг. 9 представлен график эксперимента 2 для легкого нефтепродукта/воды.
На фиг. 10 представлен график эксперимента 3 для воздуха/легкого нефтепродукта.
На фиг. 11 представлен график эксперимента 1 с топливным нефтепродуктом - определение местоположения границы нефтепродукт/вода.
На фиг. 12 представлен график эксперимента 2 с топливным нефтепродуктом - определение местоположения границы воздух/нефтепродукт.
На фиг. 13 представлен график зависимости С от ΔCt.
На фиг. 14 представлены данные, демонстрирующие результаты алгоритма поиска K-средних.
На фиг. 15 представлена Таблица XV: Алгоритм обнаружения границ - численные экспериментальные результаты.
На фиг. 16 представлен график, демонстрирующий алгоритм обнаружения границ - отношения.
На фиг. 17А-17С представлены графики, демонстрирующие зависимость выходных данных датчика от динамического полутонового представления с частотой выборки 50 миллисекунд (фиг. 17А); частотой выборки 100 миллисекунд (фиг. 17В); и частотой выборки 200 миллисекунд (фиг. 17С).
На фиг. 18 представлено схематическое изображение блок-схемы универсального алгоритма.
На фиг. 19 представлен вид в перспективе одного варианта осуществления прототипа компоновки.
На фиг. 20 представлен вид в перспективе одного варианта осуществления прототипа компоновки.
На фиг. 21А представлен покомпонентный вид в изометрии, на фиг. 21В представлен вид в изометрии, на фиг. 21C представлен фронтальный разрез.
На фиг. 22А представлен вид спереди, на фиг. 22В представлен вид снизу, и на фиг. 22С представлен вид справа.
На фиг. 23А представлена емкостная полоса, на фиг. 23В представлена плата управления, и на фиг. 23С представлен усиленный пружиной накладной замок.
На фиг. 24 и фиг. 25 представлена конструкция экспериментального стенда (бассейна).
На фиг. 26 представлен вид сверху емкостного датчика с механизмом для генерирования вибрации.
На фиг. 27 представлен график, показывающий падение напряжения Е1 перед установкой вибратора и после нее (зависимость напряжения (АЦП) от времени (с)).
На фиг. 28 представлен график, показывающий падение напряжения Е2 перед установкой вибратора и после нее (зависимость напряжения (АЦП) от времени (с)).
На фиг. 29 представлен график, показывающий падение напряжения Е35 и Е36 перед нанесением электроизоляционного материала Nanoprotech и после него (зависимость напряжения (АЦП) от времени (с)).
На фиг. 30 представлен график, показывающий сравнение значений напряжения (АЦП), измеренных перед покрытием материалом Ultra-ever dry (воздух) и после него.
На фиг. 31 представлен график, показывающий сравнение средних отличий в процентах в случаях воздуха/нефтепродукта/воды перед покрытием материалом Ultra-ever dry и после него.
На фиг. 32 представлено сравнение значений напряжений, измеренных посредством Е1 в случае с питанием от аккумуляторной батареи или USB порта.
На фиг. 33 представлен вид спереди экспериментальной установки для экспериментов по настройке емкостного датчика.
На фиг. 34 представлен график настройки тока - график (зависимость напряжения (АЦП) от тока (мкА)).
На фиг. 35 представлен график настройки времени - график (зависимость напряжения (АЦП) от времени (0,5-32 мкс)).
На фиг. 36 представлен график комбинированной настройки (зависимость Δ от времени и тока).
На фиг. 37 представлена фотография экспериментальная установка для тестов погружением (установка «Ohmsett»).
На фиг. 38 представлена фотография добавления регулируемого количества нефтепродукта - градуированные цилиндры.
На фиг. 39 представлен график, иллюстрирующий тесты погружением (1-8) - дизельное топливо (статические и динамические кривые).
На фиг. 40 представлена фотография покрытия тела датчика под пятном - нефть Hoops (выветрившаяся).
На фиг. 41 представлен график, иллюстрирующий тесты погружением (9-16) - нефть Hoops (статические и динамические кривые).
На фиг. 42 представлен график, иллюстрирующий тест 9 (статический) - нефть Hoops (выветрившаяся) (3,175 мм).
На фиг. 43 представлен график, иллюстрирующий тесты погружением (17-25) - Hydrocal (статические и динамические кривые).
На фиг. 44 представлен график, иллюстрирующий тесты погружением (26-33) - Calsol (статические и динамические кривые).
На фиг. 45 представлена фотография, иллюстрирующая емкостный датчик - смонтированная на мостике экспериментальная установка.
На фиг. 46 представлена фотография, иллюстрирующая нефтепродукт, содержащийся в канале - действие ветра.
На фиг. 47 представлен график, иллюстрирующий динамические тесты (34-35) - Hydrocal.
На фиг. 48 представлена фотография, иллюстрирующая датчик №1, установленный в нефтесборщик Termite компании Desmi.
На фиг. 49 представлено схематическое изображение одиночной чувствительной ячейки в соответствии с одним вариантом осуществления на основе штырей.
На фиг. 50 представлено схематическое изображение отдельных чувствительных ячеек в соответствии с одним вариантом осуществления на основе штырей.
На фиг. 51 представлено схематическое изображение, иллюстрирующее соседние чувствительные ячейки в соответствии с одним вариантом осуществления на основе штырей.
На фиг. 52 представлен график, иллюстрирующий зависимость измеренной емкости (пФ) от толщины материала (мм) - сравнение результатов, полученных на основе трехштыревых конструкций (одиночная ячейка, три ячейки и полный ряд с 11 штырями).
На фиг. 53 представлен вид спереди альтернативных вариантов осуществления прототипов печатные платы - компланарные и штыревые конструкции.
На фиг. 54 представлено графическое изображение экспериментальной оценки - отношение измеренной емкости и моделирования.
Подробное раскрытие настоящего изобретения
Вышеупомянутые и другие признаки и преимущества настоящего изобретения будут очевидны из следующего подробного раскрытия иллюстративных вариантов осуществления, выполненного со ссылками на прилагаемые фигуры. Подробное раскрытие и фигуры являются чисто иллюстративными, а не ограничивающими, при этом объем настоящего изобретения определяется исключительно прилагаемой формулой изобретения и ее эквивалентами.
Далее варианты осуществления настоящего изобретения будут описаны со ссылкой на фигуры, где одинаковые позиции используются для обозначения одинаковых элементов. Терминология, используемая в описании, представленном в настоящем документе, не должна интерпретироваться в качестве какого-либо ограничения просто потому, что она используется в сочетании с подробным раскрытием некоторых конкретных вариантов осуществления настоящего изобретения. Кроме того, варианты осуществления настоящего изобретения могут включать в себя несколько новых признаков, при этом ни один из них не отвечает самостоятельно за его желательные атрибуты или является существенным для практического применения, описанного в настоящем документе изобретения. Слова «проксимальный» и «дистальный» используются в настоящем документе для обозначения определенных концов компонентов описываемого инструмента. Проксимальный конец относится к концу инструмента, который находится ближе к оператору инструмента во время его использования. Дистальный конец относится к концу компонента, который находится дальше от оператора.
Использование форм единственного числа в контексте описания настоящего изобретения должно толковаться как охватывающее как единственное, так и множественное число, если иное не указано в настоящем документе или явно не противоречит контексту. Кроме того, следует понимать, что термины «содержит», «содержащий», «включает в себя» и/или «включающий в себя» при использовании в настоящем документе указывают на наличие указанных признаков, целых чисел, стадий, операций, элементов и/или компонентов, но не исключают наличие или добавление одной или более других признаков, целых чисел, стадий, операций, элементов, компонентов и/или их группы.
Перечисление диапазонов значений в настоящем документе служит просто в качестве сокращенного способа индивидуальной ссылки на каждое отдельное значение, попадающее в этот диапазон, если в настоящем документе не указано иное, при этом каждое отдельное значение включено в настоящее описание, как если бы оно было отдельно раскрыто в настоящем документе. Слово «приблизительно» при использовании совместно с числовым значением должно толковаться как указывающее на отклонение до 10% включительно от указанного числового значения. Использование любых и всех примеров или иллюстративных формулировок («например» или «такой как»), представленных в настоящем документе, предназначено исключительно для лучшего освещения настоящего изобретения и не должно рассматриваться в качестве ограничения объема настоящего изобретения, если не указано иное. Никакие формулировки в настоящем описании не следует истолковывать как указывающие на какие-либо незаявленные элементы в качестве существенных для практического применения настоящего изобретения.
Ссылки на «один вариант осуществления», «некоторый вариант осуществления», «иллюстративный вариант осуществления», «различные варианты осуществления» и подобное могут указывать на то, что вариант(ы) осуществления настоящего изобретения, описанный таким образом, может включать в себя конкретный признак, структуру или характеристику, но не каждый вариант осуществления обязательно включает в себя конкретный признак, структуру или характеристику. Кроме того, повторное использование фразы «согласно одному варианту осуществления» или «согласно иллюстративному варианту» не обязательно относится к одному и тому же варианту, хотя может быть таковым.
В контексте настоящего документа термин «способ» относится к методам, средствам, методикам и процедурам для выполнения данной задачи, включая, кроме прочего, те методы, средства, методики и процедуры, которые либо известны, либо легко разрабатываются на основе известных методов, средств, методик и процедур специалистами в области химии, биологии, биохимии и сенсорного контроля.
Устройство измерения толщины содержит датчик, выполненный с возможностью измерения толщины текучей среды, плавающей между по меньшей мере двумя средами (такой как нефтепродукт, плавающий на поверхности воды, при этом воздух находится над ним, а вода под ним). Датчик представляет собой емкостную матрицу, содержащую по меньшей мере две токопроводящие пластины, расположенные бок о бок или друг над другом, как показано на фиг. 1А и 1D. В соответствии с одним вариантом осуществления токопроводящие пластины могут не быть параллельными пластинами. Диэлектрический материал располагается в пустом пространстве между пластинами, при этом текучие среды обращены к каждой пластине, и каждый тип материала имеет отличающуюся диэлектрическую постоянную. Например, диэлектрическая постоянная воздуха равняется примерно 1, диэлектрическая постоянная смазочных нефтепродуктов находится в диапазоне от 2,1 до 2,4, и диэлектрическая постоянная воды равняется примерно 80 при комнатной температуре. Измеряя изменение емкости между полосами матрицы, устройство измерения толщины плавающей жидкости идентифицирует границу воздух/нефтепродукт и границу нефтепродукт/вода. После того, как границы были идентифицированы, а также исходя из размеров датчика, устройство измерения толщины плавающей жидкости рассчитывает толщину плавающей текучей среды.
Диэлектрические материалы по существу являются изоляторами, а это означает, что ток не будет течь через материал при подаче напряжения. Тем не менее на атомном уровне все же происходят определенные изменения. Когда напряжение прикладывают к диэлектрическому объекту, происходит его поляризация. Поскольку атомы состоят из положительно заряженного ядра и отрицательно заряженных электронов, поляризация представляет собой эффект, который слегка смещает электроны к положительному напряжению. Они не перемещаются достаточно далеко, чтобы создать поток тока через материал, так как смещение очень мало, однако оно имеет очень важный эффект, особенно в случае конденсаторов. Как только источник напряжения удаляется из материала, он либо возвращается в свое исходное неполяризованное состояние, либо остается поляризованным, если молекулярные связи в материале слабые. Разница между терминами «диэлектрик» и «изолятор» четко не определена. Все диэлектрические материалы являются изоляторами, но хороший диэлектрик должен легко поляризоваться.
Степень поляризации, возникающая при воздействии на объект определенного напряжения, влияет на количество электрической энергии, которая хранится в электрическом поле. Это описывается диэлектрической постоянной материала. Диэлектрическая постоянная является не единственным свойством диэлектрических материалов. Другие свойства, такие как диэлектрическая прочность и диэлектрические потери, не менее важны при выборе материалов конденсатора для конкретного практического применения.
Диэлектрическая постоянная материала, также именуемая диэлектрической проницаемостью материала, представляет собой способность материала концентрировать электростатические линии потока. В более практическом плане она представляет способность материала накапливать электрическую энергию в присутствии электрического поля. Все материалы, включая вакуум, накапливают энергию при нахождении в электрическом поле. Диэлектрическая проницаемость вакуума определяется как физическая постоянная ε0, которая приблизительно равна ε0 = 8,854 × 10-12 фарад на метр. Эта постоянная используется во множестве формул из области электромагнетизма.
Поскольку большинство конденсаторов состоят не из вакуума, имеет смысл определять диэлектрическую проницаемость для каждого материала. Диэлектрическая проницаемость материала определяется как ε = εrε0, где ε представляет собой абсолютную диэлектрическую проницаемость, a εr представляет собой относительную диэлектрическую проницаемость. При этом εr является числом, которое всегда больше 1, из чего следует, что все материалы накапливают больше энергии, чем свободное пространство под воздействием электрического поля. Это свойство очень полезно в практических применениях, связанных с конденсаторами. Следует отметить, что относительная диэлектрическая проницаемость зависит от множества факторов, таких как температура, давление и даже частота, поэтому в некоторых практических применениях предпочтение отдается материалам с более стабильной диэлектрической проницаемостью, но предлагаемый датчик не чувствителен к этому свойству.
Диэлектрическая постоянная воды (80 при 20°С) намного выше, чем у нефтепродуктов (приблизительно 2,1-2,4), так что измерение диэлектрической постоянной является удобным способом отличить их друг от друга, а также измерить толщину каждого из них. Между проводимостью воды и проводимостью углеводородов имеется существенное различие. Это различие обычно используют в качестве основы для обнаружения границы между этими двумя текучими средами и их относительной толщины.
Плата датчика, показанная на фиг. 1В, представляет собой четырехслойную печатную плату, при этом чувствительные площадки (электроды) расположены в верхнем и нижнем уровнях печатной платы, а соединительные дорожки расположены в двух внутренних слоях печатной платы. Чувствительные площадки (электроды) присоединены к соединительным дорожкам, встроенным во внутренние слои печатной платы. Для подачи питания и обеспечения передачи данных в микроконтроллер, расположенный в блоке обработки данных и связи (фиг. 1C), используется 4-контактный соединитель (провод). Для охвата сорока восьми чувствительных электродов использовали четыре коммутационных платы MPR121, каждая из которых подключается к двенадцати электродам. Изображение электрической схемы, описывающей соединения и адресацию цепи, представлено на фиг. 1В. На этом схематическом изображении показано соединение между четырьмя коммутационными платами MPR121 и чувствительными площадками (электродами), обозначенными позициями от 1-48. Адресация плат MPR121 осуществляется путем изменения соединения контакта ADD, имеющегося в каждой из коммутационных плат MPR121. Адресный контакт (ADD) в четырех коммутационных платах MPR121 был соединен с GND, 3,3V, SDA, SCL. Таким образом, четыре установленные контроллера MPR121 имеют следующие уникальные адреса I2C: 0×5А, 0×5B, 0×5C и 0×5D.
Компоненты блока обработки данных и связи, показанного на фиг. 1C, описаны следующим образом. Сначала входное питание, находящееся в диапазоне от 6-26 В постоянного тока, преобразовывается в 5 В постоянного посредством линейного регулятора напряжения с низким падением напряжения (LM2940), а также двух конденсаторов для сглаживания сигнала (0,47 мкФ и 22 мкФ). Обработка осуществляется с использованием макетной платы «Arduino Nano», содержащей микроконтроллер ATmega328. Этот модуль был выбран в связи с его невысокой стоимостью, низким энергопотреблением и простотой программирования. Беспроводная связь осуществляется при помощи радиочастотного модуля «ТВ394» с антенной IPEX. Радиочастотный модуль беспроводной связи подключен к плате Arduino Nano посредством контактов последовательного соединения (RX, ТХ) и получает питание от выхода регулятора напряжения (5 В) через транзистор (2N3904), действующий в качестве переключателя. Модуль GPS (SKM53) подключен к цифровым контактам ввода-вывода Arduino (D3, D2), при этом библиотека Software Serial используется для воспроизведения функциональности последовательного соединения на этих контактах. Кроме того, модуль GPS получает питание от выхода регулятора напряжения (5 В) через транзистор (2N3904), действующий в качестве переключателя. Резисторы (1 кОм) используются для ограничения тока между цифровыми контактами Arduino и соединителем базы транзистора. Четырехпроводной соединитель был добавлен для присоединения контактов питания и обмена данными к чувствительному блоку, показанному на фиг. 1А. 6,35 мм охватывающий разъем питания был добавлен для соединения с блоком питания (аккумуляторной батарей 9 В постоянного тока).
Обнаружение границ
В соответствии с одним вариантом осуществления датчик не ограничивается только обнаружением уровня границы между слоями жидкостей; при этом датчик может обнаруживать границы между различными средами с различными диэлектрическими постоянными, независимо от их агрегатного состояния (газообразного/жидкого). В случае практического применения, связанного с измерением толщины разлитых нефтепродуктов, датчик обнаруживает границу между воздухом (газом) и нефтепродуктом (жидкостью), а также границу между нефтепродуктом (жидкостью) и водой (жидкостью). Поскольку электроды подвергаются воздействию жидкой смеси, электроды, расположенные в области воды, будут замкнуты накоротко из-за высокой электропроводности воды. В отличие от множества других емкостных датчиков, описанных в литературе, замыкание накоротко электродов в случае предлагаемого датчика не является проблемой, так как абсолютные значения емкости не требуются для расчета толщины. Замкнутые накоротко электроды из-за контакта с водой обнаруживаются датчиком, так как им присущи очень низкие значения напряжения, а также большие относительные отличия от базовых калибровочных значений, полученных в воздухе. Следовательно, эти электроды классифицируются в качестве расположенных в воде электродов и удаляются из чувствительной матрицы. После того как вышеупомянутые электроды, классифицированные как расположенные в воде, удалили из матрицы измерений, алгоритм переходит к идентификации остальных электродов, окруженных воздухом и нефтепродуктом, а также обнаружению граничного электрода между двумя средами на основе относительных отличий между ними. В этом случае, поскольку нефтепродукты являются непроводящими жидкостями, электроды не замкнуты накоротко, и измеряется фактическая емкость каждого электрода. Поскольку алгоритм основан на относительных различиях между электродами для нахождения границ, фактическая точность значений емкости не является обязательным требованием.
Эффективность этой методики обнаружения границ и расчета толщины нефтепродукта была подтверждена в ходе нескольких экспериментов. Согласно одному эксперименту датчик был помещен в жидкую смесь, содержащую легкий смазочный нефтепродукт (с вязкостной характеристикой 10W) и воду, при температуре 23°С и относительной влажности 60%. Фактическая толщина нефтепродукта составляла примерно 16 мм, при этом различное количество электродов было окружено воздухом, нефтепродуктом и водой. Для расчета толщины нефтепродукта границы воздух/нефтепродукт и вода/нефтепродукт определялись с использованием относительных отношений. Как показано в Таблице I, представленной на фиг. 2Е, было рассчитано относительное отличие (RD) для каждого электрода. Отношения были получены путем деления значения следующего электрода на значение текущего электрода V(k+1)/V(k), где k представляет собой индекс текущего электрода. Графики, показанные на фиг. 2F и фиг. 2G, демонстрируют относительное отличие от калибровки, а также значения отношений для каждого электрода.
Алгоритм был использован для обнаружения двух границ. После расчета отношений алгоритм переходит к нахождению индексов электродов, имеющих максимальные отношения. В этом случае две границы были обнаружены в Е4 и Е11. Количество электродов между границами подсчитывается и используется для оценки толщины нефтепродукта (ТН) по следующей формуле: TH=NxW+(N-1)x(G), где N представляет собой количество электродов, охватываемых нефтепродуктом, рассчитываемое как N=11-4=7, W представляет собой ширину электрода, равную 2 мм, и G=0,5 мм представляет собой ширину зазора, разделяющего электроды. Толщина нефтепродукта рассчитывается как (14)+(3)=17 мм.
Согласно одному варианту осуществления устройство измерения толщины плавающей жидкости содержит емкостный датчик 100, включающий в себя по меньшей мере 48 токопроводящих полос 110, каждая из которых характеризуется высотой 2 мм и которые разнесены друг от друга в вертикальном направлении на расстояние V1, равное 1 мм, как показано на фиг. 1А. Конкретные диапазоны высоты и вертикального разделения должны соответствовать предполагаемому практическому применению и составлять от приблизительно 1 мм до приблизительно 10 мм; альтернативно, от приблизительно 0,1 мм до приблизительно 3 мм. Токопроводящие полосы распределены таким образом, чтобы образовывать по меньшей мере один столбец, имеющий сорок восемь полос. Измерительная цепь реализована на отдельной печатной плате (РСВ), содержащей микроконтроллер и модули связи (GPS, беспроводной связи) 200, включая модуль беспроводной связи, контакты питания и связи для соединения с чувствительным блоком, а также регулятор входного напряжения, как показано на фиг. 1C.
Методика измерения основана на измерении относительных изменений емкости между полосами для того, чтобы динамически и в режиме реального времени идентифицировать толщину плавающей жидкости.
Концепция геометрического емкостного измерения (матрицы)
Исходя из принципа емкостного измерения, который описан выше, предлагаемый емкостный датчик состоит из набора токопроводящих пластин (электродов), образующих матрицу конденсаторов, реализованную на прямоугольной плоскости печатной платы. Изменение емкости на каждом электроде, вызванное изменением диэлектрической постоянной окружающего материала, независимо измеряется, чтобы обнаружить тип материала (воздух/нефтепродукт/вода), в котором находится этот электрод. Электрическое поле, образованное электродами, проходит над плоскостью измерения и, следовательно, позволяет обнаружить изменения диэлектрической постоянной жидкости, окружающей датчик. Протяженность электрического поля зависит от параметров заряда (тока и времени) в дополнение к ширине электродов и величине зазора между ними. На фиг. 2А представлено поперечное сечение конструкции емкостного датчика. Поскольку нефтепродукт легче воды, он поднимается к поверхности воды и плавает над ней, образуя тонкую нефтяную пленку. Из-за волн в морской воде и перемещения платформы, на которой расположен датчик, высота исследуемой жидкости может варьировать вверх и вниз в пределах пластин датчика, в результате чего изменяется среда, окружающая электроды (воздух/нефтепродукт/вода) и, таким образом, изменяется емкость, измеряемая на каждом электроде. Основное преимущество вертикальных емкостных чувствительных матриц заключается в том, что нет необходимости проводить калибровку для различных типов нефтепродуктов (нефти)/воды на месте проведения измерений, так как в основе функционирования датчика лежит отличие в емкости между электродами, а не абсолютные значения емкости.
Благодаря использованию конструкции в виде вертикальной матрицы емкостных датчиков, предлагаемый датчик может различать границу вода/нефтепродукт и границу нефтепродукт/воздух. Толщина нефтепродукта может быть установлена независимо от участка датчика, в котором произошел контакт с нефтепродуктом. Другими словами, в отличие от нескольких реализованных емкостных датчиков уровня жидкости, известных из уровня техники, в которых используется поплавок для поддержания фиксированного положения датчика над поверхностью жидкости, предлагаемый датчик не требует каких-либо предположений по его положению относительно поверхности жидкости. Если датчик может установить две границы между различными средами, толщина может быть по-прежнему рассчитана (в пределах разрешающей способности датчика). Практическое применение этого датчика не требует каких-либо особых требований к компоновке, кроме водонепроницаемости коробки, в которой размещены электроника и аккумуляторная батарея.
Согласно одному варианту осуществления устройство измерения толщины осуществляет измерение толщины нефтепродукта во время операций по сбору нефтепродукта в открытом океане. Применяя предлагаемое устройство измерения толщины, бригада по очистке загрязнений может в режиме реального времени оценить толщину нефтепродукта в области, которую они очищают, и, соответственно, решить, следует ли им продолжить или прервать операцию очистки в этой области.
Согласно другому варианту осуществления устройство измерения толщины измеряет любую среду, лежащую между двумя другими средами, имеющими отличающиеся значения плотности, если измеряемая среда отличается от них по диэлектрическим свойствам. Практическое применение устройства измерения толщины можно даже расширить до измерения любых слоистых сред, например, толщины влажного слоя почвы. Например, в случае практического применения для измерения влажности почвы, на диэлектрическую постоянную разных типов почвы (минеральная почва: 4, органическое вещество: 4, воздух: 1) оказывает влияние содержание воды, которая имеет значительно более высокую диэлектрическую постоянную (вода: 80).
В попытке устранить ограничения, присущие предшествующему уровню техники, датчик устройства измерения толщины может быть использован во время операции по сбору нефтепродукта, когда датчик протягивают через толщу воды с одновременным измерением толщины нефтепродукта на ее поверхности. Устройство измерения толщины является новым в том смысле, что оно осуществляет оценку толщины нефтепродукта посредством использования матрицы емкостных полос, полагаясь на «относительные», а не абсолютные показания, в результате чего показания датчика становятся нечувствительными к производственным дефектам. Кроме того, датчик устройства измерения толщины может работать в динамических средах, в присутствии волн, с различными типами нефтепродуктов (нефти), в соленой/пресной воде, в различных условиях окружающей среды (освещение, температура, влажность и т.п.). Устройство измерения толщины минимизирует эффекты загрязнения благодаря тонкой ножевидной конструкции. Параметры для различных материалов, имеющих различные диэлектрические постоянные, варьируют в зависимости от таких условий, как частота возбуждения и температура. Согласно одному варианту осуществления диэлектрическая постоянная воды находится в диапазоне от примерно 88 до 55 при изменении температуры от 0 до 100°С. Предполагается, что диэлектрическая постоянная воды равняется примерно 80 при комнатной температуре (20°С). Для других распространенных материалов значения диэлектрической постоянной следующие: вакуум - 1, газы - в основном примерно 1,00 при давлении в одну атмосферу, гексан - 1,8865 при температуре 20°С, бензол - 2,285 при температуре 20°С и смазочные нефтепродукты - 2,1-2,8 при комнатной температуре в зависимости от их вязкости. Отработанные смазочные нефтепродукты могут иметь и более высокие значения диэлектрической постоянной по сравнению с неиспользованными смазочными нефтепродуктами.
В настоящем документе представлен алгоритм измерения толщины нефтепродуктов (нефти) в динамических условиях волнения. Был разработан алгоритм и получено большое количество тестовых данных. Кроме того, были созданы и протестированы несколько прототипов плат и компоновок.
Улучшенная конструкция датчика со штырями
В целях уменьшения влияния загрязнения на датчик, а также увеличения чувствительности датчика согласно одному варианту осуществления множество горизонтальных штырей 120 функционально присоединили к полосам чувствительной матрицы, как показано на фиг. 1D. Кроме того, чувствительные электроды 110 были добавлены с двух сторон датчика, и соединительные дорожки 130 были встроены в конструкцию четырехслойной печатной платы. Добавленные штыри 120 способны проникать через слой густого нефтепродукта (нефти), покрывающий полосы датчика. При погружении датчика в исследуемую жидкость, содержащую слои нефтепродукта и воды, штыри, расположенные в контактирующей с водой секции датчика, будут замкнуты накоротко из-за электропроводности воды. Верхние штыри, расположенные в контактирующей с нефтепродуктом секции, полностью погружены в нефтепродукт, и, следовательно, измеренные значения емкости связаны с диэлектрической постоянной нефтепродукта, которая отличается от диэлектрической постоянной воды и воздуха. Основываясь на этой улучшенной конструкции, фактический способ измерения, используемый датчиком, может быть представлен как сочетание методик емкостного измерения и измерения проводимости, поскольку замыкание накоротко происходит в контактирующем с водой участке датчика, а емкостное измерение происходит в контактирующих с воздухом и нефтепродуктом секциях датчика из-за их изоляционных свойств. На фиг. 1D показана конструкция улучшенного датчика, в частности, ее следующие элементы: (а): чувствительные электроды 110 (b): соединительные дорожки 130 (с): препятствующие загрязнению штыри 120 (d): печатная плата. Реализованный прототип датчика со штырями показан на фиг. 2С. Готовый чувствительный блок, включающий в себя водонепроницаемый корпус, показан на фиг. 2C-2D.
Реализация датчика
Реализованный прототип емкостного датчика состоит из чувствительного блока (матрицы электродов) и блока обработки данных (микроконтроллера). Чувствительный блок, показанный на фиг. 1А, содержит набор токопроводящих электродов, установленных на двухсторонней четырехслойной печатной плате, и четыре модуля емкостных сенсорных контроллеров «MPR121». Высота каждого электрода составляет 2 мм, и вертикальный зазор между двумя соседними электродами составляет 1 мм. Электроды размещаются на печатной плате последовательно сверху вниз, чтобы покрыть весь целевой диапазон измерения (10 см). Емкостные сенсорные контроллеры функционируют путем зарядки и разрядки каждого чувствительного электрода постоянным током в течение определенного промежутка времени. Во время возбуждения и измерения показателей каждого электрода все остальные электроды соединяются с заземлением. В конце каждого цикла зарядки и разрядки измеренное напряжение преобразуется в цифровое значение, при этом к результату применяется несколько уровней цифровой фильтрации для повышения помехоустойчивости в различных условиях окружающей среды. Микроконтроллер (Arduino Nano), расположенный в блоке обработки данных, показанном на фиг. 1C, получает цифровые значения напряжения, применяет алгоритм оценки толщины для вычисления и выдачи значения фактической толщины нефтепродукта. Наконец, результаты измерения толщины передаются в базовую станцию по беспроводной сети.
Гидродинамическая конструкция
Для обеспечения точного измерения, когда датчик протягивают через толщу воды, датчик сконструирован очень плоским (ножеподобная конструкция), поэтому он обладает минимальными сопротивлением скольжению и аэродинамическим сопротивлением. Согласно одному варианту осуществления ширина тела измерительного картриджа составляет приблизительно 1,0-2,0 мм; альтернативно, приблизительно 1,2-1,8 мм; альтернативно, приблизительно 1,4-1,6 мм. Благодаря этому датчик «прорезает» воду и нефтепродукт при движении по прямой или при повороте. Поскольку чувствительная матрица установлена на тонкой печатной плате с острыми краями, вода легко отступает от тела датчика при его протягивании, что уменьшает накопление нефтепродукта на чувствительных полосах. Кроме того, горизонтальные штыри, добавленные к чувствительным электродам, играют важную роль в увеличении степени очистки чувствительной матрицы.
В настоящем документе представлен алгоритм измерения толщины нефтепродуктов (нефти) в динамических условиях волнения.
Хотя система и способ согласно настоящему изобретению описываются главным образом применительно к разливам нефтепродуктов (нефти) в море, следует понимать, что они могут быть адаптированы для применения, связанного со сбором нефтепродукта (нефти) в условиях соленой и пресной воды, на морских платформах, на заправочных площадках, на нефтяных вышках, в гаванях и на перерабатывающих заводах и в их окрестностях, а также для защиты прибрежной окружающей среды от естественных и/или техногенных выбросов нефти и других нефтехимических продуктов. Дополнительно, хотя система и способ согласно настоящему изобретению описаны главным образом применительно к сбору нефтепродуктов (нефти) из воды, следует понимать, что они могут быть адаптированы для отделения любого материала с низкой плотностью от материала с более высокой плотностью, например, при специальной химической обработке, жиротоплении на заводах по переработке мяса, сборе эфирных масел с растений, отделении частиц руды в горнодобывающей промышленности, а также в различных других практических применениях и промышленных процессах, когда существует разница в плотности между первым и вторым материалами. Различные диэлектрические показатели также необходимы для измерения. Следовательно, для измерений необходимы различные значения плотности и различные диэлектрические показатели.
Алгоритм измерения
Алгоритм измерения направлен на определение индексов электродов, расположенных на границах между материалами с разными диэлектрическими постоянными. В соответствии с одним вариантом осуществления и исходя из геометрических свойств датчика электроды, расположенные на границе вода/нефтепродукт и границе воздух/нефтепродукт, обнаруживаются и используются для расчета толщины нефтепродукта как в статических, так и в динамических условиях. Алгоритм характеризуется низкой зависимостью от непосредственных численных значений измерений напряжения и может работать на устройстве с ограниченным количеством вычислительных ресурсов. Система начинает функционировать путем последовательного измерения значений напряжения на всех электродах с использованием емкостных сенсорных контроллеров и мультиплексоров. Микроконтроллер считывает цифровые значения напряжения, полученные с каждого электрода, и применяет несколько уровней цифровой фильтрации для повышения стабильности измерений.
В целях нормализации полученных значений напряжения для каждого электрода рассчитываются относительные процентные изменения по отношению к базовым калибровочным значениям. Калибровочные значения получают, когда датчик является полностью сухим и находится на открытом воздухе в течение определенного промежутка времени. Рассчитанные относительные процентные изменения используются алгоритмом для определения состояния (воздух/нефтепродукт/вода) каждого электрода. Поскольку каждое отношение присвоено индексу его электрода, а также известны геометрические размеры датчика (расстояние между электродами), выполняется расчет фактической толщины нефтепродукта.
Для обработки динамических случаев, когда датчик поднимается или опускается (из-за подъема или опускания судна или из-за волн), используется двухстадийный алгоритм. Первой стадией является обнаружение направления движения датчика: направление движения датчика можно установить путем использования среднего значения всех измерений напряжения в каждом цикле измерения. Для того чтобы уменьшить эффект загрязнения, алгоритм измерения «Наивысшая точка» применяется при достижении датчиком своей наивысшей точки движения в течение определенного интервала времени. Другой подход к уменьшению эффекта загрязнения, именуемый алгоритмом «Скорректированная самая низкая точка», заключается в обнаружении самой низкой точки движения датчика и применении способа коррекции для удаления определенного количества загрязненных электродов из обнаруженных контактирующих с нефтепродуктом электродов. Используя временную интерполяцию, механизм коррекции функционирует посредством нахождения количества загрязненных электродов и вычитания его из занимаемого нефтепродуктом (нефтью) интервала перед вычислением фактической толщины. По сути, механизм коррекции (алгоритм «Скорректированная самая низкая точка») предпочтительнее в случае типов высоковязких нефтепродуктов (нефти), где загрязнение является серьезной проблемой. При работе с типами легких нефтепродуктов (нефти) или при неподвижном датчике (статический случай) эффект загрязнения является минимальным, поэтому не требуется стадия коррекции, и не используется алгоритм «Наивысшая точка». Протекание всего алгоритма проиллюстрировано блок-схемой, представленной на фиг. 2Н.
В случае типов легких нефтепродуктов (например, дизельного топлива) применяется алгоритм «Наивысшая точка»; подход заключается в измерении толщины с использованием набора значений, полученных при достижении датчиком своих наивысших точек (вершин), в сохраненной матрице. Это делается потому, что загрязненные легким нефтепродуктом полосы, которые перемещаются из нефтепродукта в воздух, будут очищаться относительно быстро, при этом количество полос, которые загрязнены с нижней стороны, минимально (если таковые вообще имеются), поскольку в наивысшей точке большая часть загрязненных полос вернулась обратно в нефтепродукт. Этот алгоритм используется также в статических случаях, поскольку самые высокие точки будут регулярными точками в матрице.
Второй подход больше подходит для работы с типами тяжелых нефтепродуктов (например, Hydrocal, Calsol), когда больше ощущается негативное воздействие загрязнения. Этот подход именуется алгоритмом «Скорректированная самая низкая точка». Он функционирует путем обнаружения измерений, выполненных при достижении датчиком самых низких точек, в сохраненной матрице (минимумы) и применения к ним способа коррекции для удаления определенного количества загрязненных электродов. Используя временную интерполяцию, механизм коррекции функционирует посредством нахождения количества загрязненных электродов и вычитания его из обнаруженного занимаемого нефтепродуктом (нефтью) интервала перед вычислением фактической толщины. Причина использования этого подхода заключается в том, что в случае густых нефтепродуктов, когда датчик находится вверху, загрязненные полосы в воздухе будут долго очищаться. Следовательно, лучше рассматривать датчик, когда он наиболее погружен в воду, так как наиболее загрязненные полосы будут находиться снизу в воде. В этом случае алгоритм будет завышать оценку толщины нефтепродукта (нефти) из-за загрязнения, при этом будет необходимо проведение стадии коррекции, на которой загрязненные полосы обнаруживаются и удаляются из данных для подсчета толщины.
Подробное описание алгоритма: Калибровка
Калибровочные значения напряжения получают, когда датчик является полностью сухим и находится на открытом воздухе в течение предварительно заданного промежутка времени. Для каждого электрода среднее значение всех измеренных значений напряжения сохраняется в одномерной матрице. Во время работы относительная разность напряжений (R) каждого электрода с индексом «i» рассчитывается с использованием следующего уравнения (I):

Проверка достоверности
В каждом цикле измерения к полученным значениям применяется проверка достоверности, чтобы проверить, находится ли датчик в допустимом положении измерения. Положение измерения считается допустимым, когда последний электрод в матрице датчиков погружается в воду. Относительное изменение последнего электрода рассчитывается и сравнивается с пороговым значением (50%), чтобы определить, находится ли электрод в воде. Если рассчитанное относительное изменение превышает 50%, показатель считается допустимым. В противном случае измерение считается недопустимым и не сохраняется в матрице измерений. Кроме того, в базовую станцию отправляется текстовое сообщение (Недопустимое значение), информирующее пользователя о состоянии датчика. Это позволяет обнаружить сценарий, когда датчик находится вне воды.
Обнаружение границы (способ «Обнаружение Границы»)
Для обнаружения границы между двумя различными средами в алгоритме используется способ голосования, именуемый «Обнаружение границы» и описанный следующим образом:
Обнаружение границы (Вектора Относительных Отличий) путем создания одномерной матрицы (Голоса) размера N, где Голоса = нули (1, N) (инициализировано посредством нулей, одна строка, N столбцов). Затем подсчитать голоса каждого электрода, начиная с индекс = 2, при этом (индекс < N), Голоса (индекс) = (среднее (Относительные Отличия (индекс + 1: N)) - среднее (Относительные Отличия (1: индекс))) - (Относительные Отличия (индекс)/2). Затем получить индекс границы с максимальным значением голосов, где Мах_Значение = МАХ(Голоса), и Граница = получить индекс (Мах_Значения) (получаем индекс электрода с максимальным значением голосов). После этого возвратить индекс границы, где «N» является общим количеством электродов, «индекс» является индексом электрода.
Для измерения толщины нефтепродукта способ обнаружения границы применяется два раза итерационно. После обнаружения границы воды удаляют все электроды, находящиеся ниже границы (с большим индексом), и способ применяется к оставшимся электродам для определения границы нефтепродукт/воздух.
Алгоритм «Наивысшая точка» начинается путем инициализации обнуления счетчика, с=0, при этом (с<50). Затем, осуществляя измерение для получения Относительного Изменения, выполняют проверку достоверности и, если результат положительный (измерение допустимо), выполняют добавление в матрицу измерений. Матрица Измерений (с) = измерение; где счетчик приращения - с = с+1. Алгоритм завершается, если и когда матрица измерений заполняется, при этом Временной Вектор = нули (48). Затем получают минимальное относительное отличие для каждого столбца (электрода) для (k=l, k<48, k++). Временной Вектор (k) = MIN (Матрица Измерений (K)); и в конце расчет толщины. Получают Толщину (Временной Вектор) на основе способа «Обнаружение границы», который описан выше (обнаружение границы нефтепродукт/вода, удаление границы нефтепродукт/вода и всех электродов ниже ее (с большим индексом) из Временного Вектора, обнаружение границы воздух/нефтепродукт и вычисление толщины нефтепродукта с использованием количества электродов, расположенных между двумя границами).
Алгоритм «Скорректированная самая низкая точка» начинается путем инициализации обнуления счетчика, с = 0, при этом (с<50). Затем выполняется измерение и получение Относительного Отличия для каждого электрода. Затем выполняется проверка Достоверности и, если измерение допустимо, то выполняется добавление в матрицу измерений. Матрица Измерений (с)=измерение; при этом счетчик приращения - с = с+1. Он завершается, если и когда Матрица Измерений заполняется, при этом Временной Вектор Максимумов = нули (48), Временной Вектор Минимумов = нули (48), и Временной Вектор Амплитуды = нули (48). Затем получаются максимумы, минимумы и амплитуды. Для (k=l, k<48, k++) Временной Вектор Максимумов (k) = МАХ (Матрица Измерений (k)); Временной Вектор Минимумов (k) = MIN (Матрица Измерений (k)); и Временной Вектор Амплитуды = Временной Вектор Максимумов (k) - Временной Вектор Минимумов (k). Для того чтобы обнаружить контактирующие с нефтепродуктом электроды, обнаруживают границу воды, где Граница Воды = Обнаруженная Граница Воды (Временной Вектор Максимумов), затем рассчитывают относительное изменение движение датчика при помощи формулы: Относительное Изменение = ((среднее (Временной Вектор Максимумов) - среднее (Временной Вектор Минимумов))/ среднее (Временной Вектор Максимумов)) (100). Затем, если относительное изменение >3%, считается, что датчик перемещен и применяется стадия коррекции к границе воды путем уменьшения индекса границы воды, при этом (Временной Вектор Амплитуды (Граница воды) > среднее (Временной Вектор Амплитуды (0: индекс Границы воды; среднее амплитуд перед индексом границы воды)). Если относительное изменение < 3%, то датчик считается статичным, и граница воды не корректируется. Затем скорректированную границу воды и все расположенные ниже ее электроды (с большими индексом) удаляют из Временного Вектора Максимумов. Граница Нефтепродукта = Обнаруженная Граница Нефтепродукта (Временной Вектор Максимумов); и Занимаемый Нефтепродуктом Интервал = Граница Воды - Граница Нефтепродукта. Затем вычисляется толщина путем получения Толщины (Занимаемый Нефтепродуктом Интервал), где толщина = (Занимаемый Нефтепродуктом Интервал) (2) + (Занимаемый Нефтепродуктом Интервал-1)(1). После чего возвращается значение толщины.
Отслеживание движения в условиях динамической жидкости
Как описано ранее, целью алгоритма является определение наилучшего набора измерений для применения анализа. Процесс обнаружения движения идентифицирует динамическое состояние датчика (фиксированный/движущийся) и направление движения (вверх/вниз). Когда датчик движется вниз, большая часть относительных отличий будет увеличиваться, поскольку больше электродов будет погружено в исследуемую жидкость. Электроды, перемещающиеся из нефтепродукта в воду, и электроды, перемещающиеся из воздуха в нефтепродукт, будут иметь большие относительные отличия от базовых калибровочных значений, взятых в воздухе. Напротив, когда датчик движется вверх, относительные отличия будут уменьшаться. Среднее относительное отличие всех электродов вычисляют в каждом цикле измерения и используют в качестве индикатора движения датчика. В статическом случае, поскольку движения не происходит, среднее значение должно изменяться по времени в пределах интервала случайных ошибок. В динамических случаях среднее значение будет увеличиваться или уменьшаться в зависимости от направления движения датчика или волн. Если датчик зафиксирован на месте, среднее значение используется для отслеживания движения жидкости, попадающей на датчик. Для демонстрации этой способности относительные отличия всех электродов в каждом цикле измерения сохраняются в двухмерной матрице и преобразуются в полутоновое изображение, показанное на фиг. 17С, 17В и 17А, где ось у соответствует индексу электрода, а ось х соответствует времени. Явное изменение интенсивности цвета на изображении наблюдается в результате вертикального движения датчика на волнах. Более яркие интенсивности отражают увеличение относительного отличия из-за контакта с водой. По этому графику можно определить амплитуду и частоту волн, так как известны время выборки и геометрические свойства датчика.
Для обнаружения набора измерений, выполненных в наивысшей точке движения датчика, выбирается минимальное относительное отличие, представленное каждым электродом в течение определенного интервала времени. Напротив, для обнаружения измерений, выполненных в самой низкой точке, выбираются максимальные относительные отличия.
Концепция схемы дискретных измерений датчика основана на геометрических свойствах классифицированных электродов для расчета толщины нефтепродукта, что делает ее более надежной по сравнению с традиционными методиками непрерывного емкостного измерения в таких же условиях.
Еще одно преимущество концепции дискретных измерений по сравнению с методиками непрерывного емкостного измерения заключается в том, что калибровка по различным типам нефтепродуктов (нефти)/воды не требуется, поскольку фактические значения емкости не используются в расчетах уровня жидкости. Благодаря этому датчик может работать с различными типами жидкостей (тяжелые и легкие нефтепродукты (нефть)/пресная и соленая вода) без необходимости повторной калибровки. Важность этого момента заключается в том, что датчик может работать в ситуациях, когда несколько типов жидкостей могут смешиваться вместе во время выполнения операции, например, в практических применениях, связанных с разливами нефти и нефтепродуктов. В отличие от этого, методики непрерывного емкостного измерения и другие методики измерения, требующие калибровки по различным типам жидкостей, могут считаться ненадежными для таких практических применений (смесь неизвестных типов масел).
Разница в форме также важна, потому что датчик сконструирован таким образом, чтобы быть похожим на нож, режущий воду, когда его протягивают или раскачивают. Использование датчика для осуществления измерений согласно методикам непрерывного емкостного измерения, в которых используется поплавок для поддержания фиксированного положения датчика на поверхности жидкости, будет вызывать скопление нефтепродуктов (нефти), при этом датчик не будет должным образом работать при наличии вертикального перемещения.
Однако схема крепления предлагаемого датчика не требует использования поплавка для поддержания датчика в конкретном местоположении (фиг. 2I). Для того чтобы справиться с динамическими условиями, датчик использует относительные отличия для обнаружения границы воздух/жидкость и удаляет классифицированные в качестве контактирующих с воздухом электроды из матрицы измерений. На основе схемы дискретных измерений контактирующий с воздухом участок динамически обнаруживается и удаляется, несмотря на различные волны и условия протягивания. Важно отметить, что датчик может быть прикреплен в области своего центра к любому установочному механизму, так что электроды датчика, начиная от контактирующей с воздухом секции и заканчивая подводной секцией, могут свободно перемещаться в вертикальном направлении через исследуемую жидкость.
Методика измерения емкости, используемая в предлагаемом датчике, основана на современных емкостных сенсорных контроллерах. Недорогие и маломощные емкостные сенсорные контроллеры с множеством входов, используемые в системе, последовательно измеряют емкость каждого электрода и преобразуют соответствующее напряжение в цифровое значение перед отправкой его в микроконтроллер. Емкостные контроллеры функционируют путем зарядки и разрядки каждого чувствительного электрода постоянным током в течение определенного промежутка времени. В конце каждого цикла зарядки и разрядки измеренное напряжение преобразуется в цифровое значение, при этом к результату применяется несколько уровней цифровой фильтрации, что повышает помехоустойчивость в различных условиях окружающей среды. Микроконтроллер получает цифровые значения напряжения и передает их в алгоритм оценки относительной толщины для расчета фактической толщины нефтепродуктов (нефти).
Расчет толщины плавающей текучей среды исходя из размеров датчика основан на принципе дискретных измерений, при этом толщина плавающей текучей среды рассчитывается после определения количества электродов, погруженных в жидкость, и с использованием их геометрических свойств, а не фактических измерений емкости.
Поскольку алгоритм измерения является относительным и основывается на отличиях между текущими значениями всех электродов, а не на калибровочных значениях, изменения температуры, относительной влажности и освещения не влияют на алгоритм измерения.
Датчик предназначен для измерения толщины слоев различных жидкостей на открытой воде (в дополнение к закрытым сосудам) без необходимости использования специальных установочных или плавучих платформ. Как указывалось ранее, датчик может обнаруживать и обрабатывать толщину воздушной среды, что снимает какие-либо специальные требования к установке и плавучести.
В предлагаемом датчике используется принцип дискретных измерений, при этом не требуются эталонные датчики, поскольку фактические значения емкости не используются в алгоритме оценки толщины. При использовании предлагаемого датчика не нужно ничего знать о точной диэлектрической проницаемости жидкостей перед измерением. Важно отметить, что во время разливов нефтепродуктов (нефти) разные типы нефтепродуктов (нефти) могут смешиваться вместе, что ограничивает использование заранее определенных значений диэлектрической проницаемости для расчета фактической толщины нефтепродуктов (нефти). Таким образом, основным преимуществом предлагаемого датчика является то, что не требуется осуществлять предварительную калибровку для различных жидкостей перед началом работы. Предлагаемый датчик может работать с различными типами нефтепродуктов (тяжелые/легкие) и воды (пресная/соленая) только на основе базовых значений, измеренных в воздухе.
В предлагаемом датчике не используется какой-либо электроизоляционный материал. Все электроды подвергаются воздействию исследуемой жидкости. Параметры электродов измеряются последовательно, при этом для определения толщины используется методика дискретных измерений без использования фактического значения емкости (непрерывное измерение).
Предлагаемый датчик адаптируется к волнообразному движению путем обнаружения контактирующей с воздухом части датчика, что позволяет использовать его в динамических условиях и условиях волнения.
Предлагаемый датчик выполнен с возможностью работы в условиях открытой воды, а также в закрытых сосудах, и имеет относительно высокую разрешающую способность (несколько миллиметров). Предлагаемая конструкция датчика может обрабатывать динамические условия и волны, полагаясь на методику дискретных измерений и непрерывно обнаруживая контактирующую с воздухом часть датчика.
Предлагаемый датчик не использует фактическое значение емкости для его преобразования в толщину. Вместо этого он использует методику дискретных измерений, позволяющую различать несколько сред путем обнаружения границ (воздух/нефтепродукт - нефтепродукт/вода) путем использования геометрических свойств датчика без необходимости знания фактической диэлектрической постоянной исследуемой жидкости. При этом важно отметить, что использование фактического измеренного значения емкости для получения толщины будет сильно зависеть от динамических условий из-за явления загрязнения, в частности при работе с высоковязкими жидкостями (например, тяжелой сырой нефтью).
Предлагаемый датчик может работать посредством обнаружения множества границ между несколькими средами, которые относятся к разным типам (газ/жидкость) и имеют разные диэлектрические постоянные. В практическом применении, связанном с определением толщины нефтепродукта, предлагаемый датчик работает посредством обнаружения двух границ; при этом первая граница находится между воздухом и нефтепродуктом (граница воздух/нефтепродукт), а вторая граница находится между нефтепродуктом и водой (граница нефтепродукт/вода). Кроме того, количество границ может быть увеличено для соответствия желаемому практическому применению.
Предлагаемый датчик независимо измеряет емкость каждого электрода и использует относительный алгоритм для обнаружения границ между несколькими средами на основе значений процентного изменения, не полагаясь на какие-либо пороговые значения.
Емкостный датчик: Конструкция датчика
Емкостный датчик состоит из набора токопроводящих пластин (электродов), образующих матрицу конденсаторов, реализованную на плоской печатной плате. Изменение емкости на каждом электроде, вызванное изменением диэлектрической постоянной, измеряется независимо, чтобы обнаружить тип окружающего материала (воздух/нефтепродукт/вода). Электрическое поле, образованное электродами, проходит над плоскостью измерения и, следовательно, позволяет обнаружить изменения диэлектрической постоянной жидкости, окружающей датчик. Емкостный датчик состоит из чувствительного блока и блока обработки данных.
Емкостный чувствительный блок
Чувствительный блок содержит тридцать семь токопроводящих электродов, расположенных на одинаковом расстоянии друг от друга и распределенных сверху вниз на верхнем слое двусторонней печатной платы (фиг. 3А-3С). Согласно одному варианту осуществления электроды имеют следующие размеры: ширина - приблизительно 2 мм, длина - приблизительно 50 мм, вертикальный разделительный зазор - приблизительно 0,5 мм. Нижний слой печатной платы содержит дорожки, соединяющие электроды с соединительным разъемом. 37-контактный D-сверхминиатюрный соединитель [7, 8] для печатной платы был выбран для соединения чувствительного блока с модулями емкостных контроллеров (MPR121) в блоке обработки данных. D-сверхминиатюрные соединители выбираются из-за их компактного размера, а также большого количества контактов. Чувствительный блок покрыт прозрачным электроизоляционным материалом, предоставленными компанией «Nanoprotech» [9], который состоит из следующих ингредиентов: минеральный смазочный материал высокой очистки, антикоррозионные присадки, антиоксидантные парафиновые и нафтеновые углеводороды. Рекомендованная температура использования этого материала составляет от приблизительно -20°С до приблизительно +35°С, и он сохраняет свои свойства в температурном диапазоне от приблизительно -80°С до приблизительно +140°С.
Блок обработки емкостных данных
Блок обработки емкостных данных содержит модули емкостных сенсорных контроллеров MPR121 (фиг. 4) для измерения значений емкости, а также плату микроконтроллера (Arduino Nano) для управления процессом измерения и вычисления толщины нефтепродукта (нефти). MPR121 представляет собой емкостной сенсорный контроллер, используемый в практических применениях, связанных с обнаружением прикосновения и приближения. Он поддерживает двенадцать чувствительных электродов и может быть подсоединен к микроконтроллеру, оборудованному каналом связи I2C. Этот модуль обычно работает с входным напряжением от 1,6 В до 3,3 В при температуре в диапазоне от приблизительно -40°С до приблизительно +85°С. Он характеризуется низким потреблением тока, составляющим приблизительно 29 мкА при частоте выборки приблизительно 16 мс. Адресный контакт (ADD) используется для установки адреса I2C микросхемы. По умолчанию контакт ADD соединен с GND, что устанавливает для адреса I2C значение 0×5А. Микросхема может быть настроена на три других адреса I2C путем присоединения контакта ADD следующим образом: ADD к 3,3V = 0×5 В / ADD к SDA = 0×5С / ADD к SCL = 0×5D [10].
Три модуля MPR121 используются платой контроллера после присвоения уникального адреса I2C каждому модулю. Каждый модуль подключается к плате контроллера Arduino с помощью двух линий питания и двух линий связи I2C (3,3V - 3,3V/SCL - A5/SDA - A4/GNG - GND). Чувствительные контакты соединяются последовательно с электродами на измерительной плате в направлении сверху вниз. Код итеративно сканирует каждый электрод и считывает отфильтрованное значение напряжения, предоставляемое внутренним 10-битным аналого-цифровым преобразователем (АЦП).
MPR121 может измерять значения емкости в диапазоне от приблизительно 10 пФ до приблизительно 2000 пФ с разрешающей способностью приблизительно 0,01 пФ. Напряжение, измеренное микросхемой, обратно пропорционально емкости, на которую влияет количество заряда, накопленного в каждом электроде. Напряжение каждого электрода измеряется путем подачи на него тока постоянной величины в течение фиксированного промежутка времени (см. фиг. 5). Емкость электрода изменяется из-за изменения диэлектрической постоянной исследуемой жидкости, что приводит к изменению измеренного напряжения. Величина тока (I) и время заряда (Т) настраивают для установки количества заряда, прикладываемого к электродам. Пиковое напряжение измеряют после последовательной зарядки каждого электрода. Емкость (С) вычисляется посредством уравнения С=Q/V=IxT/V, где Q представляет собой величину заряду, измеренную в кулонах, а V представляет собой величину напряжения, измеренную в вольтах.
Микросхема содержит набор различных регистров, используемых для настройки рабочих параметров и получения выходных данных с устройства. Основные регистры, используемые в предлагаемой системе, перечислены ниже:
Регистр отфильтрованных данных электрода (0×04-0×1D):
В этом регистре хранятся отфильтрованные выходные данные, соответствующие выходному сигналу второго фильтра в диапазоне от 0 до 1024. Эти данные получают путем измерения значения напряжения на каждом канале и преобразования его из аналогового формы в цифровую форму с помощью внутреннего 10-битного АЦП. Этот регистр обновляется для каждого произведения ESI×SFI и является регистром только для чтения.
Регистр конфигурирования фильтрации/глобального CDC (0×5С)
Первые два бита этого регистра используются для установки количества итераций для первого фильтра (итерации первого фильтра - FFI), при этом могут быть установлены следующие значения: 00 (6 образцов - по умолчанию), 01 (10 образцов), 10 (18 образцов), и 11 (34 образца). Остальные шесть битов используются для конфигурирования величины тока заряда, подаваемого на электроды. Эта секция конфигурирования тока именуется током заряда-разряда (CDC) и может быть установлена в диапазоне значений от 0 до 63 (000000 (отключено), 1 (1 мкА), 010000 (16 мкА) (по умолчанию) и 111111 (63 мкА)).
Регистр конфигурирования фильтрации/глобального CDT (0×5D)
Первые три бита этого регистра используются для конфигурирования времени зарядки (время заряда-разряда - CDT), два бита используются для задания количества взятых образцов (выборок) для второго фильтра (итерации второго фильтра - SFI) и три бита используются для настройки времени выборки (интервал выборки электрода - ESI). Значение CDT можно установить равным приблизительно 32 мкс путем установки значения битов, равного 111, а можно отключить путем использования 000. Другие значения могут быть установлены с помощью следующего уравнения: CDT=2^(n-2), где n представляет собой десятичное кодирование трехбитного двоичного значения. Значением по умолчанию для битов CDT является 001, что соответствует 0,5 мкс. Для SFI могут быть установлены следующие значения: 00 (4 образца - по умолчанию), 01 (6 образцов), 10 (10 образцов), и 11 (18 образцов). Для ESI может быть установлены значения от 000 до 111, что соответствует значению периода от 1 мс до 128 мс, путем использования следующего уравнения: период = 2^n мс, где n - десятичное кодирование используемого 3-битного двоичного значения. Регистры 0×5С и 0×5D представляют собой два основных регистра, используемые для настройки конфигурации устройств MPR121. Все глобальные параметры фильтрации и зарядки устанавливаются с использованием этих двух регистров. Примененные настройки будут использоваться всеми электродами, если отключены опция автоконфигурации и функция индивидуальной зарядки/разрядки.
Плата Arduino Nano была выбрана из-за ее низкой стоимости, простой программируемости и возможности связи I2C. На фиг. 6 представлены схема соединений между Arduino и модулями MPR121. Двенадцать входных каналов от каждого модуля MPR121 соединены с электродами чувствительного блока. Основной источник питания (VDD) MPR121, характеризующийся диапазоном рабочего напряжения от приблизительно 1,71 В до приблизительно 3,6 В, присоединен к выходному контакту с напряжением приблизительно 3,3 В регулятора платы Arduino и отделен конденсатором 0,1 мкФ от GND. Модуль GPS (SKM 53) и беспроводной приемопередатчик (2,4 ГГц) подключены к Arduino через аппаратный и программный последовательный интерфейс. Транзисторы (2N3904) управляются микроконтроллером и используются в качестве переключателя для включения/выключения модулей GPS и беспроводной связи. На фиг. 7A-7D представлена аппаратная реализация емкостного датчика.
Примеры
Было проведено несколько экспериментов для оценки выходных данных предлагаемого емкостного датчика в различных условиях и с использованием разных типов нефти и нефтепродуктов (тяжелых/легких). Во время экспериментов датчик был погружен в исследуемую жидкость (нефтепродукт/вода), и измерения напряжения передавались по беспроводной сети на базовую станцию. Программное обеспечение было разработано для автоматического получения и сохранения измеренных значений напряжения.
Типы нефтепродуктов (нефти)
Топливный нефтепродукт (нефть)
Проведены эксперименты для оценки эффективности предложенного емкостного датчика при работе с тяжелым топливным нефтепродуктом. При этом вязкость полученного тяжелого топливного нефтепродукта была измерена с помощью вискозиметра, имеющегося в наших лабораториях, и полученные результаты были в диапазоне от 3300 до 3500 сП. Вязкость топливного нефтепродукта измеряли с использованием следующей процедуры: ротор определенного диаметра погружается в нефтепродукт и вращается с точной скоростью, заданной в оборотах в минуту, при этом измеренное сопротивление дает вязкость среды. Результаты представлены в Таблице I.
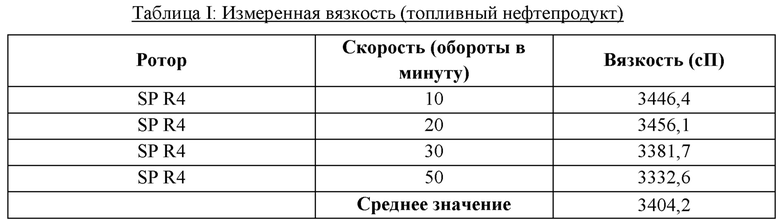
Как показано в Таблице I, измеренная вязкость выражается в сантипуазах (сП), что представляет собой абсолютную вязкость нефтепродукта. Кинематическая вязкость выражается в сантистоксах (сСт). Основное различие между двумя единицами измерения заключается в том, что сСт (кинематическая вязкость) представляет собой отношение плотности жидкости к ее абсолютной вязкости в сП. Для того чтобы преобразовать абсолютную вязкость (сП) в кинематическую вязкость (сСт), полученные значения (сП) следует разделить на плотность жидкости. Большинство углеводородов (топливные нефтепродукты (нефть) или смазочные нефтепродукты) имеют плотность от 0,85 до 0,9. Для того чтобы вычислить среднюю кинематическую вязкость этого топливного нефтепродукта, среднее значение измеренной абсолютной вязкости (3400 сП) умножают на плотность нефтепродукта (нефти). Для плотности приблизительно 0,85 кинематическая вязкость составляет приблизительно 4000 сСт. Для плотности приблизительно 0,9 кинематическая вязкость составляет приблизительно 3777 сСт. Кинематическая вязкость доступного топливного нефтепродукта составляет от приблизительно 3777 до приблизительно 4000 сСт, если измерять при комнатной температуре (приблизительно 25°С).
Легкие/средние нефтепродукты (нефть)
Для экспериментов с легкими и средними нефтепродуктами (нефтью) были выбраны три различных типа масел с собственной вязкостной характеристикой, доступные на местном рынке Ливана, при этом каждое из них имеет разную вязкость, как показано в Таблице П.

Предварительные эксперименты
Сначала были проведены эксперименты с предложенным емкостным датчиком для оценки его способности различать воздух, воду и нефтепродукт. Параметры конфигурации модулей MPR121 были установлены следующим образом: ток заряда 16 мкА, время заряда 0,5 мкс и временной период 1 мс.
Эксперимент 1 - Датчик в воздухе
В этом эксперименте датчик находился только в воздухе, при этом показатели первых двенадцати электродов измерялись и регистрировались каждые пять секунд. Пример экспериментальных результатов показан в Таблице III, а соответствующий график показан на фиг. 8.

Обратите внимание на то, как результаты демонстрируют разницу между абсолютными значениями напряжениями, измеренными на каждом электроде, который находится в одной и той же среде (воздухе). Эта разница в первую очередь связана с неизбежными несоответствиями при производстве каждого электрода, включая такие аспекты, как длина дорожек, пайка и соединители. Однако, поскольку алгоритм оценки толщины нефтепродуктов основан на относительных, а не на абсолютных измерениях напряжения, разница между измеренными значениями не повлияет на точность результатов. Более важным является стабильность и повторяемость измеренных значений во времени.
Эксперимент 2 - Нахождение границы нефтепродукт/вода (легкий нефтепродукт)
Целью этого эксперимента является наблюдение за воздействием нефтепродукта на фактическое значение напряжения, измеряемое каждым электродом. Изначально датчик помещали в воду, а затем постепенно в контейнер добавляли легкий нефтепродукт (10 сСт); эта процедура гарантирует отсутствие контакта нефтепродукта с нижними электродами датчика во время погружения. Таким образом, первые шесть электродов сверху датчика были покрыты нефтепродуктом, тогда как остальные электроды были погружены в воду. Значения напряжения первых двенадцати электродов измерялись каждые пять секунд; примеры экспериментальных результатов приведены в таблице IV, а соответствующий график показан на фиг. 9.
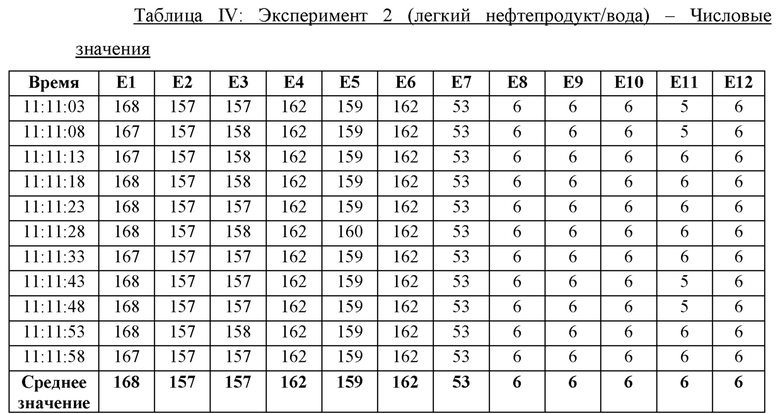
Как видно фиг. 9, результаты показывают, что напряжение, измеренное пятью нижними электродами (Е8-Е12), было намного ниже напряжения, измеренного остальными электродами. Этот результат был ожидаемым, поскольку диэлектрическая постоянная воды (80) намного выше диэлектрической постоянной других непроводящих сред (воздух = 1, нефтепродукт = 2,1). Кроме того, напряжение первых пяти электродов (покрытых нефтепродуктом) было ниже, чем напряжение, считываемое теми же электродами, находящимися в воздушной среде (Эксперимент 1). Напряжение, измеренное седьмым электродом (Е7), было частично уменьшено из-за того, что он расположен на границе нефтепродукта и воды и, соответственно, частично погружен в нефтепродукт. Эти результаты подтвердили эффективность предлагаемого подхода к оценке толщины нефтепродукта.
Эксперимент 3 - Нахождение границы нефтепродукт/воздух (легкий нефтепродукт)
Целью эксперимента 3 является отслеживание отличия между значениями напряжения, измеряемыми электродами датчика при движении датчика между воздушной средой и средой нефтепродукта. Значения напряжения, измеряемые первыми двенадцатью электродами датчика, были зарегистрированы при вертикальном движении датчика между двумя средами. Измерение регистрировалось каждую секунду. Пример экспериментальных результатов показан в Таблице V, а соответствующий график показан на фиг. 10.
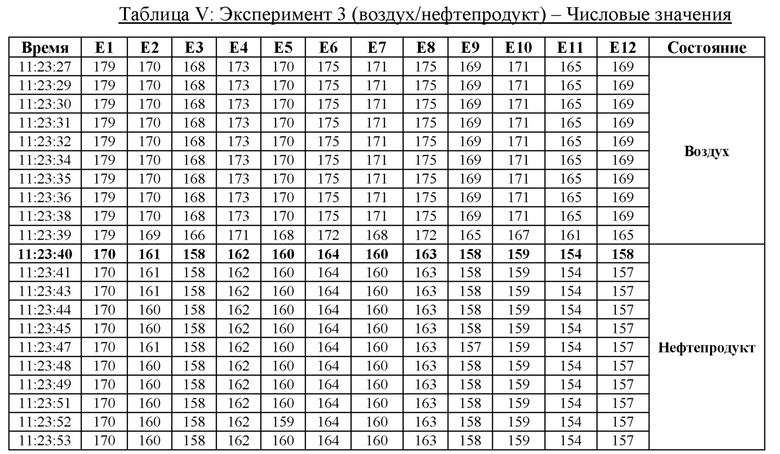
Эксперимент показывает мгновенное изменение измеренных значении напряжения при перемещении между средой нефтепродукта и воздушной средой. Следует обратить внимание на то, что, хотя отличие небольшое, измеренное напряжение в воздухе всегда выше, чем в нефтепродукте.
Решение проблемы загрязнения нефтепродуктом
Нанесение покрытия на емкостный датчик
Использование супергидрофобного покрытия на емкостном датчике действует одновременно в качестве защиты медных полос и отталкивающего вещества для любых остатков нефтепродукта на поверхности датчика. Продукт Ultra-Ever-Dry [13], предлагаемый компанией Ultratech [14], был протестирован.
Эксперименты с топливным нефтепродуктом
Эксперимент 1 - Нахождение границы нефтепродукт/вода
В этом эксперименте датчик был погружен в топливный нефтепродукт и воду, при этом показатели трех электродов измерялись и регистрировались каждую секунду. Цель этого эксперимента заключается в мониторинге показаний напряжения датчика при перемещении электродов датчика между топливным нефтепродуктом и водой. Результаты одного из экспериментов показаны в Таблице VI, а соответствующий график показан на фиг. 11. (Температура: 23°С, Относительная влажность: 60%).

Результаты показывают отличие между значениями абсолютного напряжения, измеренными каждым электродом при движении между топливным нефтепродуктом и водой. Высокие значения, показанные на фиг. 11, соответствуют значениям, измеренным при нахождении электродов в топливном нефтепродукте, а низкие значения соответствуют значениям, измеренным в воде. Хотя электроды датчика полностью покрыты тонким слоем нефтепродукта после первого погружения в топливный нефтепродукт (из-за его высокой вязкости), значения напряжения, измеренные электродами при погружении в нефтепродукт, отличаются от значений, измеренных в воде, несмотря на то, что они покрыты топливным нефтепродуктом. Это отличие используется в алгоритме, чтобы различать границы нефтепродукт/вода.
Эксперимент 2 - Нахождение границы нефтепродукт/воздух
Целью этого эксперимента является отслеживание отличия между значениями напряжением, измеряемыми электродами датчика при движении между нефтепродуктом и воздухом. Значения напряжения двух электродов измеряли каждую секунду; экспериментальные результаты для одного из экспериментов показаны в Таблице VII, а соответствующий график показан на фиг. 12. (Температура: 23°С, Относительная влажность: 60%).
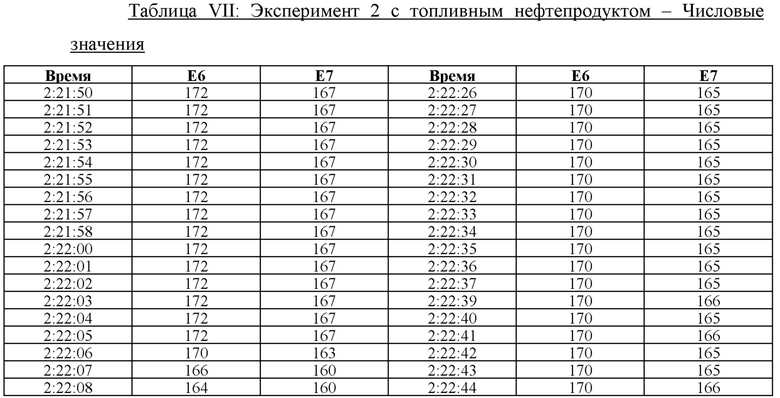
Результаты показывают, что значения напряжение, измеренные двумя электродами (Е6-Е7) при движении между топливным нефтепродуктом и воздухом, отличаются. В последней части эксперимента скорость движения была увеличена, в результате чего был получен сигнал более высокой частоты, как показано на фиг. 12. Этот результат показывает, что предлагаемый датчик может применяться для типов нефтепродуктов с высокой вязкостью, таких как протестированный топливный нефтепродукт.
Влияние условий окружающей среды
Для оценки влияния условий окружающей среды (температуры и относительной влажности) на результаты измерений были проведены два эксперимента. В ходе первого эксперимента датчик находился на открытом воздухе, и показания регистрировались каждые 30 секунд. В течение 16-часового эксперимента относительная влажность варьировала от 72% до 58%, а температура находилась в диапазоне от 21°С до 24,7°С. Диапазон измерений для каждого электрода был очень ограничен и в худшем случае не превышал 3,8%.
В ходе второго эксперимента датчик был помещен в закрытое помещение, где температура и влажность менялись относительно быстро из-за кондиционирования воздуха. В течение эксперимента относительная влажность варьировалась от приблизительно 60% до приблизительно 46%, а температура находилась в диапазоне от приблизительно 21,2°С до приблизительно 24,7°С. Диапазон измерений для каждого электрода был очень ограничен и в худшем случае не превышал приблизительно 2,7%.
Эти результаты являются первоначальным свидетельством того, что воспроизводимость выдаваемых датчиком показаний будет высокой в различных условиях окружающей среды.
Алгоритм оценки толщины нефтепродукта (нефти)
Алгоритм измерения направлен на получение вертикального профиля исследуемой жидкости. Толщина нефтепродукта (нефти) рассчитывается исходя из геометрических размеров датчика после подсчета количества электродов, погруженных в нефтепродукт (нефть). Были оценены несколько подходов для определения наиболее точной и надежной методики оценки толщины нефтепродукта во всех случаях (статических/динамических). В следующих разделах описаны основные оцениваемые способы.
Алгоритм поиска K-средних
Перед реализацией любого алгоритма для оценки толщины нефтепродуктов (нефти) экспериментальные результаты были нанесены на график зависимости С от ΔCt, где С представляет собой отличие между базовой емкостью (в воздухе) каждой полосы и ее емкостью в окружающей среде; ΔCt представляет собой переходное изменение С, показывающее, насколько быстро нефтепродукт стекает с полосы (фиг. 13).
На этом графике отмечается очевидная кластеризация точек данных в зависимости от среды, в которой они находятся. Соответственно, точки группировки данных были основаны на характеристическом векторе, состоящем из С и ΔCt, с использованием способа поиска K-средних [15] в качестве способа кластеризации, поскольку известно, что он дает хорошие результаты, когда количество кластеров известно заранее. В данном случае были выбраны три кластера, представляющие воздух, нефтепродукт и воду. Для реализации алгоритма в реальном времени было разработано программное обеспечение с использованием среды Microsoft Windows Forms .Net (С #). Результаты алгоритма измерения, включающие в себя оцененную толщину нефтепродукта (мм) и индексы электродов, которые включены в каждый кластер, а также исходные значения измерения напряжения, показаны на графическом пользовательском интерфейсе программного приложения (фиг. 14).
Как показано на фиг. 14, активированные электроды (первые десять) объединены в три разные группы (воздух/нефтепродукт/вода). Индекс каждого электрода, классифицированного в один из трех кластеров, показан на фиг. 14. Датчик был погружен вертикально из воздушной среды в среду нефтепродукт/вода. Обратите внимание, что, как и ожидалось, уменьшение значений напряжений на двух нижних электродах (Е8 и Е9) не повлияло на классификацию, поскольку скорость изменения рассматривается в качестве второго атрибута кластеризации. В этом случает расчетное количество контактирующих с нефтепродуктом электродов (4) было идентично фактическому количеству электродов, погруженных в нефтепродукт, согласно визуальному наблюдению.
Хотя результаты алгоритма K-средних были точными при отсутствии движения датчика (статический случай), непрерывное вертикальное движение датчика оказывает сильное влияние на результаты (динамический случай), поскольку этот сценарии может внести различные коррективы, включающие переход полос между различными средами.
Оценка толщины на основе обнаружения границ
Другой подход был реализован и протестирован для определения толщины нефтепродукта на основе разницы между границей воздух/нефтепродукт и границей нефтепродукт/вода. Для тестирования алгоритма был проведен эксперимент с частотой выборки 1/300 миллисекунд. Используемый тип нефтепродукта - легкое масло для двигателя (10W-40). Датчик был погружен в смесь нефтепродукт/вода с толщиной нефтепродукта 1 см. Эксперимент проводился в лаборатории при температуре 24°С и относительной влажности 59%. Экспериментальные результаты, показанные в Таблице XV (фиг. 15), представляют отличие в процентах между измеренным значением напряжения каждого электрода и калибровочным значением, полученным в воздухе.
Для получения толщины нефтепродукта одним из способов является вычисление разницы между индексом электрода, расположенного на границе нефтепродукт/вода, и индексом электрода, расположенного на границе воздух/нефтепродукт. Для осуществления этого необходимо идентифицировать границы при помощи алгоритма, основанного на относительных характеристиках электродов. Исходя из результатов, показанных в Таблице XV (фиг. 15), была замечена четкая разница между значениями до и после электрода Е5. Кроме того, электрод Е9 демонстрирует аналогичные характеристики. После вычисления среднего значения представленных показаний для каждого электрода вводится новый параметр, именуемый «отношением», который вычисляется путем деления среднего значения каждого электрода с индексом «i» на среднее значение его соседнего электрод с индексом «i+1» и показан в последней строке Таблицы XV (фиг. 15). Поскольку отношения вычисляются путем выполнения операций деления, алгоритм заменяет нулевые значения на единицу, чтобы избежать ошибок деления. На фиг. 16 показан график рассчитанных отношений, сдвинутых на один электрод вправо.
Как показано на фиг. 16, электроды, расположенные в граничных слоях (Е6 и Е10), демонстрируют резкое снижение рассчитанных отношений. Для того чтобы получить индекс каждого граничного электрода, алгоритм предусматривает получение первых двух минимумов ряда отношений. Затем рассчитывается разница между индексами двух электродов с минимальными отношениями (Е10-Е6 = 4). Эта разница используется для расчета толщины нефтепродукта на основе геометрических размеров электродов.
Доказано, что этот способ дает точные результаты только в статическом случае, так как после его тестирования в течение нескольких итераций при движении датчика в вертикальном направлении через исследуемую жидкость наблюдалась высокая ошибка при обнаружении границы воздух/нефтепродукт из-за малой разницы диэлектрических постоянных между воздухом и нефтепродуктом и уменьшенного отношения сигнал-шум в результате движения.
Основываясь на результатах, полученных с помощью первых двух способов, алгоритм должен обнаружить зависимость между статическим и динамическим случаями и фокусироваться на полосах, которые демонстрируют изменение, так как это будут электроды, которые осуществляют переход между средами.
Анализ неопределенности в статическом случае (легкий нефтепродукт)
После реализации алгоритма измерения емкостный датчик был протестирован в статическом режиме, и результаты точности были рассчитаны после выполнения ряда измерений толщины. На основе итеративного нахождения максимальных пространственных градиентов были обнаружены границы воздух/нефтепродукт и вода/нефтепродукт, при этом количество электродов, расположенных между ними, используется для расчета толщины. В этом эксперименте были протестированы два случая. В первом случае алгоритм измерения применяется к каждому показанию напряжения без использования нахождения среднего. Во втором случае перед применением алгоритма измерения используется скользящее среднее значений напряжения. Для расчета скользящего среднего каждое новое значение напряжения добавляется к ранее выполненным измерениям напряжения, и полученная сумма делится на два. Ниже приведены результаты точности измерения. В каждом случае были получены средние значения для примерно трехсот измерений. Используемый нефтепродукт - легкий нефтепродукт с вязкостью 10 сСт. Эксперимент был проведен в закрытом помещении при температуре примерно 24°С. Результаты для первого случая показаны в Таблице VIII, а измерения для второго случая показаны в Таблице IX.

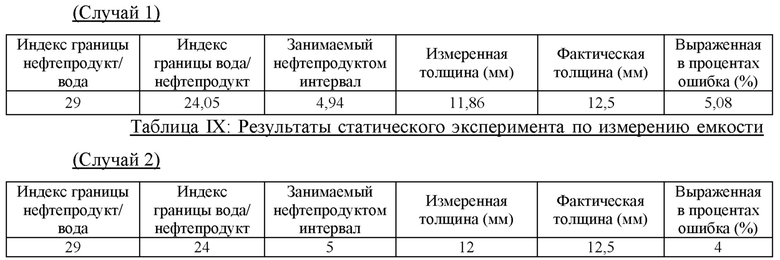
Экспериментальные результаты показывают, что после применения скользящего среднего (Случай 2) выраженная в процентах ошибка снижается с 5% до 4%. Обратите внимание, что эта точность принята из-за конфигурации датчика, в котором используются дискретные электроды с шириной 2 мм и вертикальным зазором 0,5 мм. Обратите внимание, что в случае 1 ошибка произошла при обнаружении границы воздух/нефть из-за небольшой разницы между диэлектрическими постоянными двух сред.
Анализ динамического случая
Для улучшения визуализации измерений значения напряжения сохраняли в двухмерных матрицах и преобразовывали в полутоновые изображения. Как показано на фиг. 17А, 17В и 17С, при движении датчика наблюдается явное изменение цвета. Это наблюдение дает описание свойства волнения, таких как его амплитуда и частота. Обратите внимание, что изображение в первой горизонтальной области каждой фигуры является исходным изображением, а изображение во второй горизонтальной области получено после применения выравнивания гистограммы для получения лучшего контраста. Ось у соответствует индексу электрода (сверху вниз), а ось х соответствует времени. Ось у представляет относительное отличие емкостей всех полос, начиная с тех полос, которые находятся в воздухе сверху (черные), и до полос, которые контактируют с нефтью (серые) и водой (белые).
После анализа полученных изображений был разработан универсальный алгоритм для обнаружения толщины нефтепродукта во всех случаях. Новый алгоритм описан в следующем разделе.
Универсальный алгоритм (статический или динамический случай)
Универсальный алгоритм обрабатывает значения напряжения, полученные от датчика, и принимает решение о состоянии датчика перед выбором подходящих критериев для измерения фактической толщины. Алгоритм использует два разных подхода для обнаружения контактирующих с нефтепродуктом электродов на основе динамического состояния датчика. Первый способ основан на отличиях между значениями напряжения в реальном времени и калибровочными значениями напряжения. Этот способ используется, когда датчик находится в стационарном режиме. Второй подход основан только на временных отличиях между исходными значениями датчика и не использует калибровочные значения. Второй способ применяется при вертикальном движении датчика относительно нефтепродукта в исследуемой жидкости. Блок-схема, показанная на фиг. 18, кратко описывает универсальный алгоритм.
Калибровка
Калибровочные значения напряжения получают, когда датчик является полностью сухим и находится на открытом воздухе в течение предварительно заданного промежутка времени. Для каждого электрода среднее значение всех измеренных значений напряжения сохраняется в одномерной матрице. Во время работы относительная разность напряжений (R) каждого электрода с индексом «i» рассчитывается с использованием следующего уравнения:

Обнаружение границы воды
В течение определенного интервала времени набор значений измерения напряжения всех электродов собирают и сохраняют в двухмерной матрице, где количество столбцов соответствует количеству активированных электродов, а количество строк соответствует количеству измерений, выполненных в течение этого интервала времени. Перед сохранением вектора измерения проверка достоверности применяется к полученным значениям, чтобы проверить, выполнено ли измерение, когда датчик находится в допустимом положении измерения. Положение измерения считается допустимым, когда по меньшей мере один из нижних электродов датчика демонстрирует относительно высокое отличие в процентах от калибровочного значения (например, более 50%), указывая на то, что он погружен в воду.
Для каждого измерения граница воды рассчитывается и сохраняется в отдельной матрице, называемой «Уровни». Поскольку основное отличие в полученных значениях возникает между электродами, погруженными в воду, и другими электродами, окруженными воздухом или нефтепродуктом, граница воды для каждого измерения (K) рассчитывается с использованием следующего способа, именуемого «Обнаружение границы»:
Обнаружение границы (вектор значений), затем создать одномерную матрицу (Голоса) размера N. Голоса = нули (1, N). Затем рассчитать голоса каждого электрода с индексом = 2. При этом (индекс < N). Голоса (индекс) = среднее (Значения (индекс + 1: N) - среднее (Значения (1: индекс-1)). Мах_Значение = МАХ(Голоса). Затем получить индекс границы с максимальным значением голосов. Граница = получить. Индекс (Мах_Значения). Затем вернуть индекс границы. Граница возврата, где «N» представляет собой общее количество электродов, «I» представляет собой индекс электрода, и «K» представляет собой индекс измерения.
Обнаружение состояние датчика
Исходя из обнаруженных границ воды, сохраненных в матрице «Уровни», состояние датчика определяется как динамическое или статическое. Для каждого состояния создается новая двумерная матрица, в которой сохранены значения напряжения каждого электрода, когда датчик находится в одном и том же состоянии. При обнаружении изменения состояния применяется способ измерения для определения толщины нефтепродукта. Способы измерения для каждого случая (статический/динамический) будут описаны в следующем разделе. Чтобы принять решение о том, в каком состоянии находится датчик, для каждого измерения (K) применяется следующий процесс:
Для динамического случая: Когда уровни изменяются (увеличиваются или уменьшаются). Когда (Уровни(K)! = Уровни(K-1)). Затем сохранить вектор значений во временной матрице, именуемой «Динамика». Динамика (K) = Значения (K); если состояние изменено, то очистить (Динамика). Получить Максимальное значение каждого электрода и сохранить его в новом векторе. Мах = МАХ(Динамика). Получить Минимальное значение каждого электрода и сохранить его в новом векторе. Min = MIN(Динамика). Затем вызывать динамический алгоритм для вычисления толщины нефтепродукта. Толщина нефтепродукта = Динамический алгоритм (Мах, Min).
Для статического случая: Счетчик = 1. Когда датчик не движется. Когда (Уровни(K) == Уровни(K-1)). Добавить вектор значений к временной матрице. Статика (K) = Значения (K). Если (Счетчик >20) {Прекращение}, то указать изменение или количество значений >20. Очистить (Статика), затем вычислить среднее значение каждого электрода и сохранить его в новом векторе. Среднее значение = Среднее (Статика). Затем вызвать статический алгоритм для вычисления фактической толщины нефтепродукта. Где толщина нефтепродукта = статический алгоритм (среднее значение).
Где «K» представляет собой индекс измерения, и «Динамика/Статика» - временная двумерная матрица для хранения значений, когда датчик находится в одном и том же состоянии. Мах и Min создаются каждый раз при изменении состояния и содержат максимальное/минимальное значения для каждого электрода во временной матрице (Динамика/Статика). Вектор среднего значения получают путем вычисления среднего значения каждого электрода после обнаружения изменения состояния или после того, как количество статических записей превышает предварительно заданный порог.
Вычисление толщины нефтепродукта
Количество контактирующих с нефтепродуктом электродов используется для оценки толщины нефтепродукта (ТН) посредством следующего уравнения: где N представляет собой количество электродов, покрываемых нефтепродуктом, W представляет собой ширину электрода = 2 мм, и G = 0,5mm представляет собой ширину зазора, разделяющую электроды.
Динамический алгоритм используется для определения толщины нефтепродукта после обнаружения изменения динамического состояния. Этот способ берет векторы Мах и Min в качестве входных данных и возвращает фактическую толщину нефтепродукта. Суть способа можно кратко описать следующим образом:
Динамический алгоритм (Мах, Min): Вычислить различие между каждым значением в векторах Мах и Min. Вектор Разности = (Max) - (Min). Затем присвоить пороговое значение, которое будет использоваться для обнаружения фиксированных и измененных электродов, порог = МАХ(Мах) - MAX(Min). Затем для получения количества электродов, которые изменили среду, индекс = 1; K = 0; при этом (индекс <= N). Если (Вектор Разности[индекс] > порог). Измененный[С] = индекс. K = K+1. индекс = индекс +1. С = Длина(Измененный). Затем для получения количества электродов, которые по-прежнему находятся в нефтепродукте, индекс = 1; С = 0; при этом (индекс <= N). Затем контактирующие с нефтепродуктом электроды находятся между измененных электродов, Если ((Вектор Разности[индекс] <= порог) и (индекс!>МАХ(Измененный) и (индекс!<MIN(Измененный)). Фиксированный[C] = индекс. С = С+1. Индекс = индекс+1. Интервал = Длина(Измененный/2) + Длина(Фиксированный). Если 2 мм представляет собой ширину каждого электрода, а 0,5 мм представляет собой вертикальный зазор между электродами, толщина = (интервал) (2) + (интервал-1) (0,5). Вернуть (толщина).
В статическом случае временные отличия между значениями измерений напряжения не могут быть использованы для расчета толщины, так как датчик не двигается, и значения не будут изменяться, если не считать изменений в пределах диапазона шума. Вместо этого относительные отличия от калибровки используются для итеративного обнаружения границы воздух/нефтепродукт и границы нефтепродукт/вода. Статический алгоритм принимает вектор среднего значения в качестве входного параметра и возвращает фактическую толщину нефтепродукта. Этот способ использует описанный выше способ «Обнаружение границы» и может быть кратко описан следующим образом:
Статический алгоритм (среднее значение): Обнаружение границы нефтепродукт/вода, где WI = Обнаружение Границы (Среднее значение). Затем удалить все индексы электродов выше границы воды. SV = Среднее значение (1: (WI -1)). Затем обнаружить границу воздух/нефтепродукт. AI = Обнаружение границы (SV); вычислить количество контактирующих с нефтепродуктом электродов. Интервал = WI - AI; Вычислить толщину нефтепродукта, где толщина = (интервал) (2) + (интервал-1) (0,5), затем вернуть (толщина).
Результаты универсального алгоритма
После применения универсального алгоритма к набору измерений, выполненных при вертикальном движении датчика со случайной скоростью, которое имитирует реальный сценарий случайного волнения, оцененная толщина была приемлемой, при этом максимальное количество неверно классифицированных электродов равнялось одному, из чего следует, что максимальная ошибка была на уровне разрешающей способности датчика. Экспериментальные результаты представлены в Таблице XVI.

Как показано в Таблице XVI, среднее значение измеренной толщины нефтепродукта, которое получено с использованием универсального алгоритма, составляет 26,75 мм. Исходя из фактической толщины (27 мм), выраженная в процентах ошибка составляет 0,95%, что является приемлемым.
Компоновка; емкостный датчик; предварительное проектирование
Были выполнены несколько итераций предварительного проектирования; при этом в каждую конструкцию были внесены модификации, чтобы она в конечном счете соответствовала простому в изготовлении и герметичному корпусу. На фиг. 19 представлена модель САПР самой первой конструкции, в которой не учитывались средства герметизации и запирания. На фиг. 20 представлена первая итерация, которая содержала герметичную камеру и герметичную крышку с боковыми скобами для фиксации, эта итерация была напечатана на 3D-принтере и оценена. На фиг. 21А, 21В, 21C представлена вторая итерация, эта итерация учитывает пространство для хранения аккумуляторных батарей и средства герметизации.
Последняя итерация проектирования
Последняя итерация, показанная на фиг. 22А, 22В, 22С, учитывает производственный процесс и допуски в рамках этой конструкции, которые могут быть достигнуты на доступном станке с ЧПУ, герметичность достигается путем приложения давления к резиновым уплотнительным кольцам и прокладкам. На фиг. 23А, 23В, 23С представлен увеличенный вид емкостной полосы, платы управления и накладного замка, подобранного для приложения давления к прокладке корпуса.
Компоновка емкостного датчика осуществляется в производственных цехах университета, при этом материал, выбранный для корпуса, представляет собой полиамид, действующий в качестве твердой резины/прочного пластика, и отдельные части будут соединяться друг с другом с использованием сжимаемого герметичного уплотнения со степенью сжатия 40% для уплотнительных колец и резиновых прокладок за счет применения пружинных усиленных накладных замков компании McMaster.
Тестовые стенды: волновой бассейн
Ниже приведена первоначальная конструкция волнового бассейна с линейной направляющей сверху.
Выбранная модель насоса для генерации волн - модель Abyzz A200 производства VENOTEC, Германия, которая может обеспечивать расход до 17 л/ч при максимальной скорости 5,4 м/с с максимальным напором 8,8 м и максимальным давлением 1,5 бар, при этом диапазон мощности составляет от 4 до 200 Вт.
Большой волновой бассейн был изготовлен и доставлен на место тестирования, как показано на фиг. 24, фиг. 25. Были проведены тесты на устойчивость бассейна к волнам. Насос сначала работал в режиме с положительным потоком с мощностью от 0% до 100% (200 Вт), случайный режим был протестирован со случайными направлениями потока при случайной мощности; волновой режим был протестирован при изменении времени направления потока (симметричный профиль и несимметричный профиль). Кроме того, насос был протестирован с минимальным отрицательным направлением потока
(изменяющимся от 0% до 100%), а также с положительным направлением (положительным направлением потока от минимальной до полной мощности). Бассейн прошел все тесты, сварные швы были проверены на герметичность, также были проверены прозрачные окна, утечек не обнаружено.
Привод волнового бассейна
Линейный привод был собран для волнового бассейна, чтобы перемещать емкостный датчик вперед и назад по волнам в различных сценариях, при этом привод представлял собой привод с зубчатым V-образным ремнем размером 1,5 м от компании OPENBUILDS. Поскольку длина бассейна составляет 3 м, удлинитель был изготовлен из квадратной балки 4×4 см длиной 3,1 м, чтобы обеспечить выступ по 5 см с обеих сторон, при этом к удлинителю были приварены стопоры, чтобы удерживать его на месте во время тестов и предотвратить его скольжение или падение в бассейн. Привод установлен на удлинитель при помощи угловых железных кронштейнов, два из которых приварены к поверхности балки удлинителя, а другие два используются с целью выравнивания.
Лабораторный бассейн
3-фазный бесщеточный двигатель постоянного тока (BLDC) был выбран для приведения в действие реечно-шестереночного механизма, используемого для вертикального перемещения датчика через смесь нефтепродукт/вода и зафиксированного на лабораторном бассейне (контейнер из плексигласа 50×50 см), при этом двигатель имеет следующие характеристики: рабочее напряжение: 12 В; номинальная частота вращения вала двигателя: 3700 оборотов в минуту; диаметр двигателя: 36 мм; редуктор: планетарного типа; частота вращения: приблизительно 150 обороты в минуту/с; длина вала: 20 мм; передаточное число редуктора: 27:1; число сигнальных импульсов цикла: 2*27; режим управления: регулирование частоты вращения методом широтноимпульсной модуляции, регулирование направления; импульсный выходной сигнал обратной связи.
Двигатель взаимодействует с MATLAB Simulink с помощью Arduino Mega 2560 для запуска моделирования внешнего режима в реальном времени, при этом все профили скорости нормализованы к диапазонам ШИМ. После проведения нескольких экспериментов с двигателем для идентификации параметров было отмечено, что частота вращения вала двигателя достигает максимума 150 оборотов в минуту в диапазоне ШИМ от 150 до 255.
Добавление высокочастотного механизма для генерирования вибрации к датчику
Хотя на начальной фазе тестирования была подтверждена способность емкостного датчика определять среду, в которой он находится, наблюдалась одна проблема с загрязнением нефтепродуктом электродов в воде ниже уровня пятна нефтепродукта, когда датчик покачивался вверх и вниз. Хотя нефтепродукт в конечном итоге стекает с полос и попадает на поверхность, динамика этого процесса относительно медленная для густых нефтепродуктов, и существует риск отрицательного влияния на определение границы нефтепродукт/вода. Для решения этой проблемы датчик был оборудован вибрирующим модулем (фиг. 26), чтобы ускорить удавление нефтепродукта с загрязненных полос. В целях оценки действия вибрирующего модуля было проведено два эксперимента: до и после активации вибраторов. Одна и та же процедура использовалась при осуществлении двух экспериментов. Датчик погружался вертикально из фиксированного положения в воду, проходя через тонкий плавающий слой нефтепродукта. Регистрировалось напряжение, измеренное емкостными полосами. Для интерпретации экспериментальных результатов были зарегистрированы и сопоставлены падения напряжения двух полос, перемещающихся из начального положения (Воздух) в конечное положение (Вода) при проникновении через слой нефтепродукта. Пример экспериментальных результатов показан в Таблице 30, а соответствующие графики, отображающие падение напряжения на двух полосах во времени, показаны на фиг. 27 и фиг. 28.
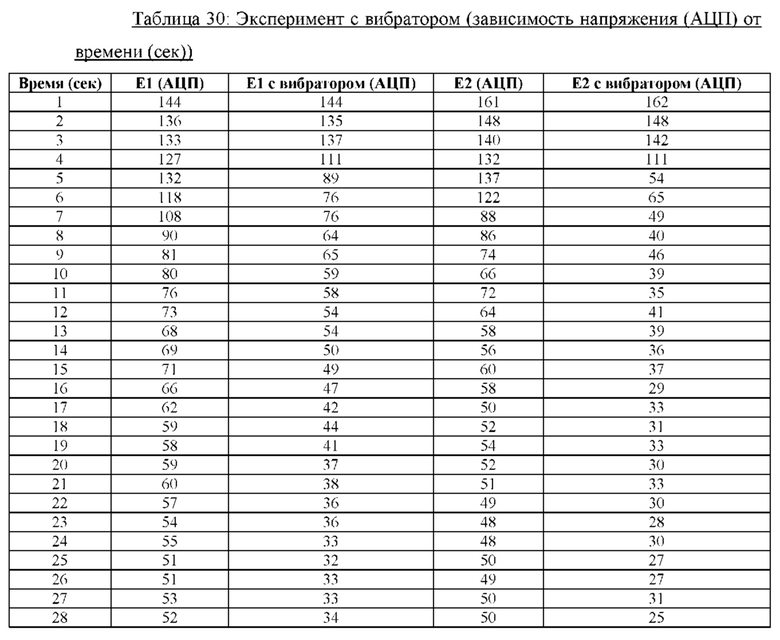

Экспериментальные результаты показали, что применение вибраторов помогло увеличить скорость падения напряжения двух электродов. Этот результат подтверждает идею использования вибрационной системы, поскольку ускорение падения напряжения играет важную роль в уменьшении эффекта загрязнения нефтепродуктом.
Предварительные работы по нанесению покрытия на основе материала Nanoprotech
В дополнение к предложенному выше вибратору были протестированы несколько материалов покрытия. Сначала датчик был покрыт прозрачным электроизоляционным материалом, предоставленными компанией "Nanoprotech" [9], который состоит из следующих ингредиентов: минеральный смазочный материал высокой очистки, антикоррозионные присадки, антиоксидантные парафиновые и нафтеновые углеводороды. Рекомендованная температура использования этого материала составляет от -20°С до +35°С, и он сохраняет свои свойства в температурном диапазоне от -80°С до +140°С. Распыление материала Nanoprotech на измерительный картридж выполнено вручную, и перед первым использованием плату сушат на открытом воздухе в течение примерно двадцати четырех часов. Излишний материал (жидкие остатки), оставшийся после распыления на корпусе датчика, удаляются после завершения процесса сушки. Материал полностью прозрачен и покрывает все компоненты датчика, включая контакты (штыри), полосы и соединительные дорожки.
Для сравнения рабочих параметров датчика до и после нанесения покрытия Nanoprotech были проведены два идентичных эксперимента. В процессе этих двух экспериментов датчик размещали в фиксированном положении над поверхностью воды и погружали в смесь нефтепродукта и воды. Для отслеживания влияния материала на процесс загрязнения нефтепродуктом регистрировали и анализировали падение напряжения на последних двух электродах (Е35 и Е36) при их переходе от слоя воздуха к слою воды. Результаты эксперимента погружения показаны на фиг. 29.
Как показано на фиг. 29, покрытие Nanoprotech увеличило скорость изменения измеренного напряжения при погружении датчика из нефтепродукта в воду. Об этом можно сделать вывод по резким падениям значений напряжения Е35 и Е36, которые зарегистрированы сразу после начала погружения. Для сравнения перед нанесением покрытия скорость изменения была намного ниже, как показано на графике. Для более детальной интерпретации результатов приведены числовые значения, соответствующие всем измеренным значениям напряжения (АЦП).
В конце эксперимента, когда значения напряжения почти стабильны, значения, измеренные датчиком с покрытием, были ниже, чем значения, регистрируемые датчиком без покрытия. Например, значения напряжения, измеренные Е35 и Е36 перед нанесением покрытия, составляли от семи до восьми (АЦП). После нанесения покрытия значения напряжения на Е35 и Е36 снизились примерно до двух и трех (АЦП). Это снижение подтверждает тот факт, что покрытие повлияло на повышение проводимости электродов.
В дополнение к экспериментам по оценке загрязнения нефтепродуктом, провели несколько экспериментов для анализа влияния покрытия на отклик датчика во всех условиях (воздух-нефтепродукт-вода). Значения напряжения, измеренные на электродах с покрытием и без покрытия при погружении в воздух и воду, показаны в Таблице 31.
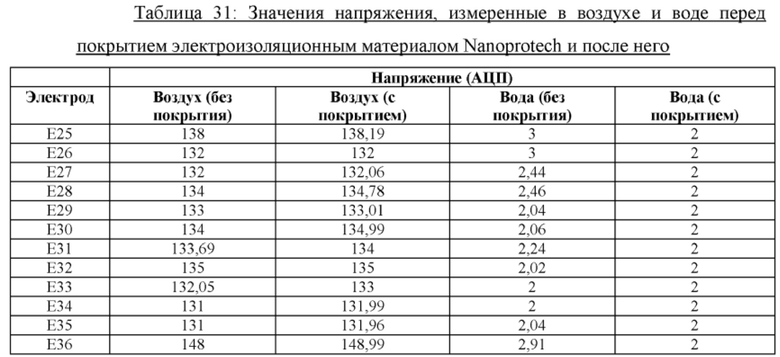
Как показано в Таблице 31, значения напряжения, измеренные электродами датчика, почти равны в случаях воздуха и воды до и после нанесения покрытия. Однако было замечено, что в случае воды, значения напряжения, измеренные после нанесения покрытия, немного ниже и более стабильны, чем значения напряжения, измеренные до нанесения покрытия. Этот результат подтверждает вывод, сделанный в предыдущем эксперименте, о том, что покрытие Nanoprotech улучшило проводимость полос без оказания негативного влияния на характеристики датчика в других случаях (равные значения в случае воздуха).
Кроме того, с целью проверки влияния покрытия Nanoprotech на обнаружение нефтепродуктов были проведены два идентичных эксперимента до и после нанесения покрытия на измерительный картридж. Сначала датчик был частично погружен в воду, при этом первые пять электродов были окружены воздухом. Затем нефтепродукт был добавлен в контейнер для воды из фиксированного положения над поверхностью воды. Целью этого способа является наблюдение за эффектом, вызываемым нефтепродуктом, непосредственно контактирующим с электродами, без воздействия со стороны движения датчика. Кроме того, основная цель этого эксперимента заключается в проверке, влияет ли нанесение покрытия на способность обнаружения нефтепродукта. Экспериментальные результаты, включающие в себя измеренные значения напряжения (АЦП) и относительные процентные изменения значений напряжения, показаны в Таблице 32.
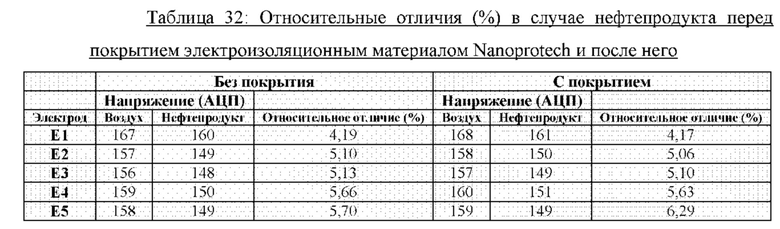
Экспериментальные результаты показали, что относительные процентные изменения, вызванные контактом с нефтепродуктом, были аналогичны как в версии с покрытием, так и в версии без покрытия (4-6%). Таким образом, можно сделать вывод, что нанесение покрытия не оказало отрицательного влияния на способность обнаружения нефтепродукта.
В результате экспериментальные результаты, представленные выше, показали, что покрытие Nanoprotech помогло снизить загрязнение нефтепродуктом без оказания влияния на возможности обнаружения воздуха и нефтепродукта. Кроме того, согласно визуальным наблюдениям применение материала Nanoprotech уменьшает смачиваемость платы датчика при погружении в воду. Однако имеются несколько вопросов относительно фактического состава этого материала, а также причин повышения проводимости электродов. Необходимо уточнить фактическую роль материала, исходя из того факта, что основная роль этого материала заключается в изоляции электрических частей в воде, а не в повышении электропроводности. При этом далее будут дополнительно рассмотрены полученные результаты.
Предварительные работы по нанесению покрытия на основе материала Ultra-ever dry
В попытке снижения загрязнения нефтепродуктом полос был протестирован продукт Ultra-Ever-Dry [13], предлагаемый компанией Ultratech [14]. Во-первых, после того как на поверхность датчика были нанесены два компонента продукта (базовое покрытие и верхнее покрытие), датчик был несколько раз погружен в набор смесей вода/нефтепродукт, включающий в себя образцы легких, средних и тяжелых (топливных) нефтепродуктов, и извлечен из него. В результате в большинстве испытаний было замечено, что нефтепродукты сходили с поверхности датчика сразу после его извлечения из исследуемой жидкости. Однако в некоторых случаях, в частности при работе с тяжелыми нефтепродуктами (топливо), после погружения на плате датчика наблюдались остатки нефтепродуктов.
Для более точного анализа оказанного воздействия было проведено несколько экспериментов. Эксперименты проводились с использованием одной и той же платы датчика до и после нанесения покрытия. Материал Ultra-Ever Dry наносится посредством распыления вручную в две стадии. На первой стадии на измерительный картридж распыляют материал нижнего покрытия. Затем плату сушат на воздухе примерно 15 минут. На второй стадии материал верхнего покрытия наносят на плату путем распыления вручную. После нанесения верхнего покрытия датчик сушат на воздухе примерно 24 часа перед первым использованием. Процесс распыления проводился в специализированном вытяжном шкафу. Вытяжной шкаф представляет собой автономное лабораторное помещение с фильтрами, используемое для удаления опасных паров и частиц, образующихся в процессе распыления. Важно отметить, что распыление производилось путем регулярных повторяющихся движений, чтобы получить однородное и равномерно распределенное количество материала покрытия на поверхностях датчика. Однако, поскольку распыление производилось вручную (рукой пользователя), наблюдаются некоторые различия в распределении покрытия на поверхностях датчика. В ходе первого эксперимента значения напряжения, измеренные электродами датчика, регистрировались, когда датчик находился в фиксированном положении в воздухе. Для того чтобы оценить влияние этого материала на датчик, значения напряжения, полученные после нанесения покрытия, сравниваются с соответствующими значениями, полученными до нанесения покрытия. Образцы экспериментальных результатов, показывающие среднее для набора значений напряжения, измеренных первыми двенадцатью активируемыми электродами, приведены в Таблице 33, а соответствующий график показа на фиг. 30.
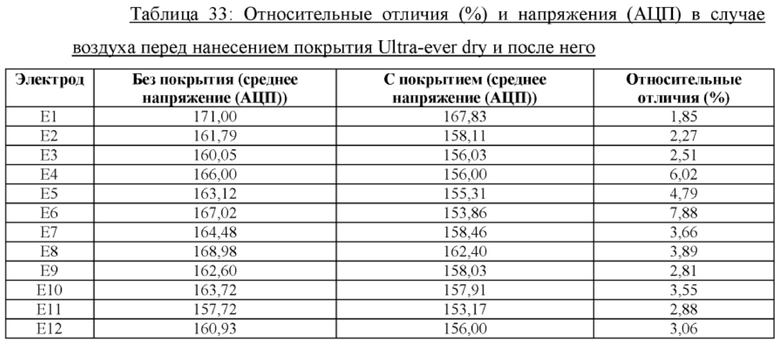
Экспериментальные результаты показали, что напряжения, измеренные емкостными полосами в случае воздуха, снизились после нанесения Ultra-ever dry материала. Поскольку напряжение обратно пропорционально емкости, был сделан вывод, что дополнительный слой покрытия увеличивает базовую емкость полос. Для того чтобы численно оценить падение напряжения, относительные отличия в процентах вычислены и показаны в Таблице 33. Отличия в процентах изменялись от полосы к полосе, находясь в диапазоне от 1,85% и 7,88%. Это изменение связано с различным распределением материала покрытия на поверхности датчика. Среднее отличие в процентах составляло примерно 3,77%.
Для наблюдения за воздействием материала покрытия в случаях нефтепродукта и воды был осуществлен другой эксперимент. Согласно этому эксперименту датчик был частично погружен в смесь нефтепродукт/вода. Перед нанесением покрытия тридцать шесть активированных электродов были распределены в смеси нефтепродукт/вода следующим образом: Е1-Е16 - воздух; Е17-Е21 - нефтепродукт; Е22-Е36 - вода.
Значения напряжения, измеренные датчиком без покрытия перед погружением в исследуемую жидкость и после него, а также относительные отличия в процентах показаны в Таблице 34.
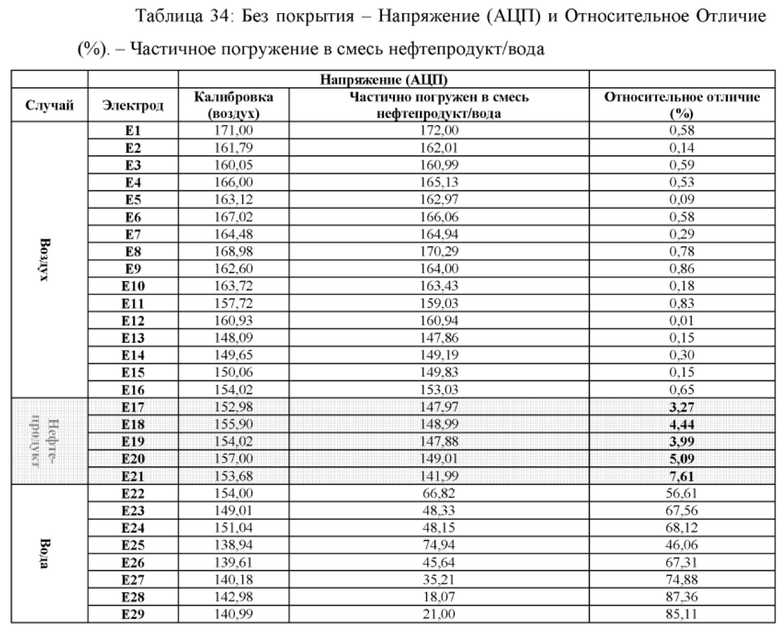

Этот же эксперимент был повторен после покрытия датчика материалом Ultra-Ever Dry. Значения напряжения (АЦП), измеренные всеми электродами, а также относительные отличия в процентах показаны в Таблице 35.
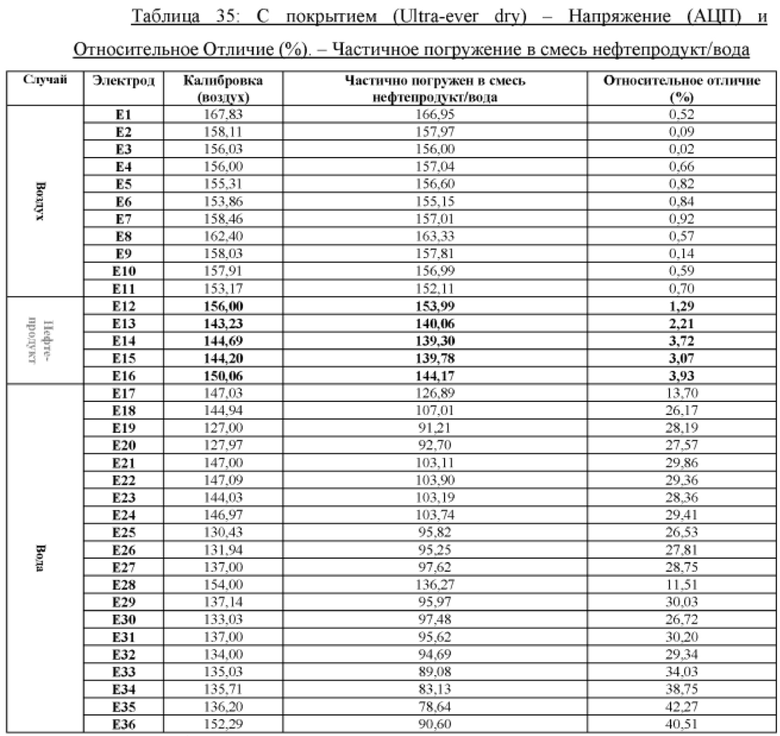
Для того чтобы оценить воздействие материала покрытия в каждом из трех случаев (воздух/нефтепродукт/вода), средние значения относительных отличий в процентах, которые вычислены для каждого случая в двух предыдущих экспериментах (Таблица 34 и Таблица 35), показаны в Таблице 36, а соответствующий график показан на фиг. 31.


Этот эксперимент показал, что после нанесения покрытия Ultra-ever dry уменьшилось относительное процентное изменение в случае воды. Теоретически, такой результат был ожидаемым, поскольку покрытие играет основную роль в изоляции электродов от воды. Без покрытия электроды были замкнуты накоротко из-за электропроводности воды, таким образом, разность потенциалов упала примерно до нуля. Напротив, после нанесения покрытия на электроды был добавлен дополнительный слой (диэлектрик), что увеличило базовую емкость и уменьшило чувствительность датчика. Кроме того, наблюдалось снижение относительного изменения электродов, погруженных в нефтепродукт.
Несколько важных наблюдений было сделано во время работы с материалом Ultra-Ever Dry. Во-первых, было отмечено, что методика распыления вручную (рукой пользователя) привела к неравномерному распределению толщины покрытия на поверхностях датчика. Таким образом, выявлен неоднородный слой покрытия, нестабильно влияющий на базовую емкость электродов. Исходя из этого, при нанесении покрытия рекомендуется использовать более оптимальный метод. Кроме того, было замечено, что добавление слоя покрытия Ultra-ever dry снижает чувствительность датчика. Этот вывод был сделан после наблюдения за снижением относительного отличия в процентах, вычисленного для каждого из электродов при погружении в воду и нефтепродукт. Могут быть проведены дальнейшие исследования относительно рабочих параметров этого покрытия и супергидрофобных материалов.
Оценка влияния различных источников питания на рабочие параметры датчика
Во время начального тестирования датчика для питания цепи использовались два основных источника. Первоначально цепь управления питалась посредством USB-порта ноутбука. USB-порт использовался для питания модуля Arduino, а также для получения измеренных значений напряжений от модулей MPR121. USB-порт подает в модуль Arduino 5 В постоянного тока, при этом модуль Arduino подает 3,3 В постоянного тока в контроллеры MPR121 посредством встроенного регулятора напряжения 3,3 В. Во время работы ноутбук был подключен к адаптеру питания, подключенному к сети переменного тока (220 В переменного тока). Вторым источником, используемым для питания датчика, является независимая свинцово-кислотная аккумуляторная батарея, выдающая 12 В постоянного тока. Для того чтобы оценить влияние двух источников питания на значения напряжения, измеренные емкостными полосами, датчик был помещен в фиксированное положение, при этом был зарегистрирован набор значений напряжения, измеренных всеми электродами. Датчик был установлен в фиксированное положение (окруженное воздухом), и была зарегистрирована выборка, состоящая из 250 измерений. Значения напряжения, измеренные на первых двенадцати электродах, были проанализированы и приведены в Таблице 37. Кроме того, график, показывающий значения напряжения, измеренные первым электродом Е1 в двух случаях, представлен на фиг. 32.
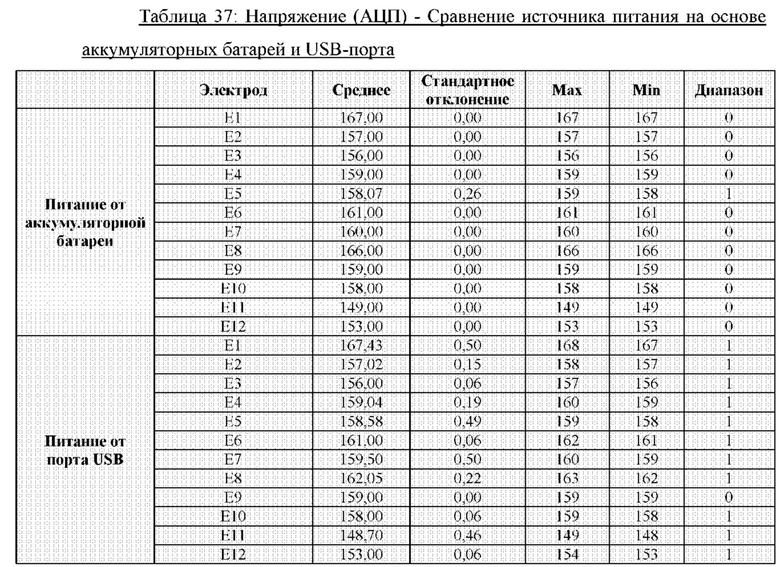
Этот эксперимент показал, что использование USB-порта в качестве источника питания вносит дополнительный шум в измеряемые сигналы напряжения. Об этом можно судить по увеличенным значениям стандартного отклонения, показанным в таблице 38, и высокочастотным колебаниям, вносимым в сигнал напряжения Е1, показанный на фиг. 32. Исходя из экспериментальных результатов, был сделан вывод о том, что подключение устройства к источникам питания переменного тока не рекомендуется, поскольку вносятся дополнительные шумы в результаты измерения датчика.
Эксперименты по настройке емкостного датчика
Как описано ранее, контроллеры MPR121 используются для измерения емкости каждого электрода в чувствительном блоке. Поскольку в модулях MPR121 для измерения емкости используется методика заряда постоянным током, параметры тока заряда и продолжительности заряда должны быть сконфигурированы перед работой. На основе этого были проведены эксперименты по настройке, чтобы найти наилучшее сочетание тока заряда и продолжительности, которые будут использоваться в окончательной конструкции датчика. Основная цель процесса настройки состоит в выборе комбинации (ток/время), которая максимально увеличивает чувствительность датчика с точки зрения различия между воздухом и нефтепродуктом. Значения измерения напряжения, используемые в экспериментах по настройке, берутся на выходе второго фильтра контроллера MPR121. Выход третьего фильтра контроллера MPR121 игнорируется в этом проекте, поскольку он сравнивает исходные значения измерения напряжение с базовыми значениями, используемыми в основном в емкостных сенсорных системах. Ток заряда может иметь значение от 1 мкА и 63 мкА, и продолжительность заряда устанавливается равной от 0,5 мкс до 32 мкс. В ходе экспериментов по настройке датчик был зафиксирован на бассейне в закрытом помещении и погружен в жидкость, которая содержит слой тяжелого нефтепродукта (топлива) толщиной 20 мм (см. фиг. 33).
Эксперименты по настройке тока
Настройка тока выполнялась посредством приравнивания продолжительности заряда фиксированному значению, составляющему 0,5 мкс, а также изменения величины тока зарядки от 1 мкА до 63 мкА с приращением 1 мкА. Экспериментальные результаты показаны в Таблице 38, а соответствующий график показан на фиг. 34. Электроды были распределены в три разные группы (воздух/нефтепродукт/вода) следующим образом: Е1-Е25 - воздух; Е26 - воздух/нефтепродукт; Е27-Е33 - нефтепродукт; Е34-Е40 - вода, имеется покрытие тонким слоем нефтепродукта (эффект загрязнения); и Е41-Е48 - вода.
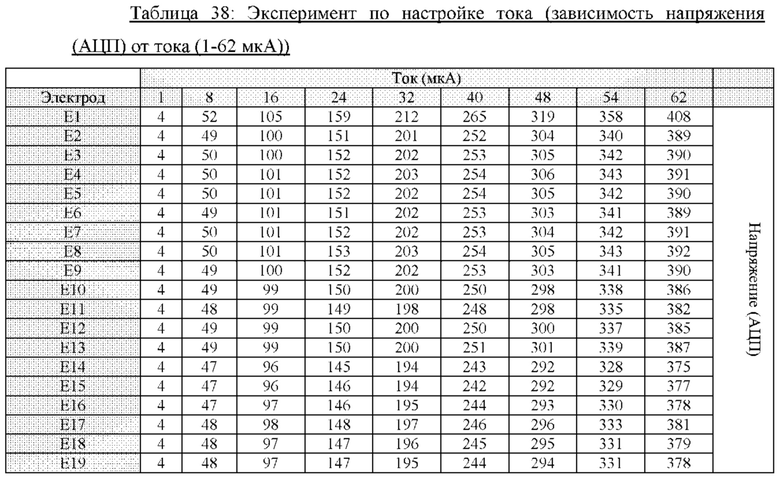
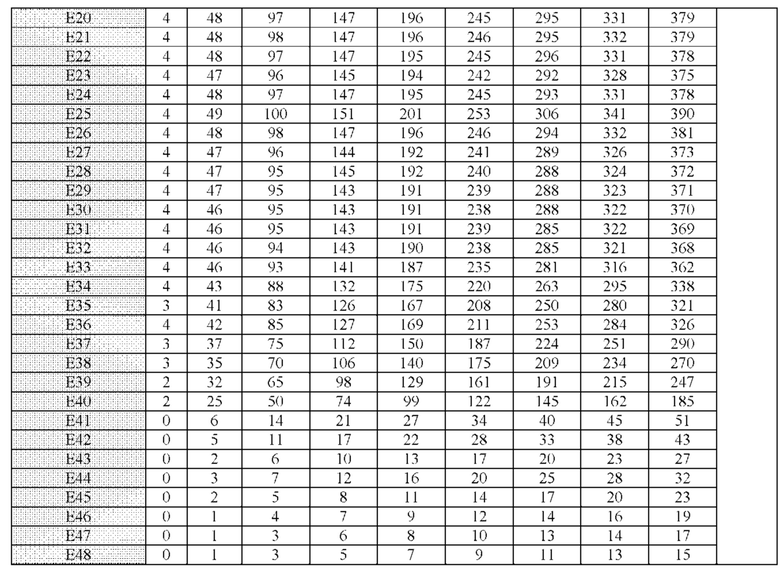
Исходя из результатов настройки, было замечено, что отличие между контактирующими с водой и нефтепродуктами электродами возрастает прямо пропорционально с током. Теоретически, этот результат является ожидаемым, так как емкость напрямую связана с произведением продолжительности и тока. Тем не менее, чтобы предотвратить насыщение 10-битного АЦП, входящего в состав MPR121, подходящий параметр продолжительности времени должен быть присвоен с учетом дополнительных экспериментов по настройке.
Эксперименты по настройке времени
В отличие от экспериментов по настройке тока, в экспериментах по настройке времени величина тока была установлена равной фиксированному значению, составляющему 1 мкА, а продолжительность заряда постепенно изменялась от 0,5 мкс до 32 мкс. Для этого в регистре CDT, входящем в состав контроллера MPR121, были установлены разные значения, чтобы установить необходимые значения времени заряда (см. Таблицу 39). Состояние электродов датчика аналогично состоянию, представленному выше в разделе экспериментов по настройке тока. Экспериментальные результаты показаны в Таблице 40, а соответствующий график показан на фиг. 35.

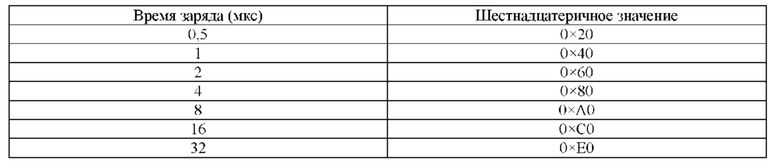
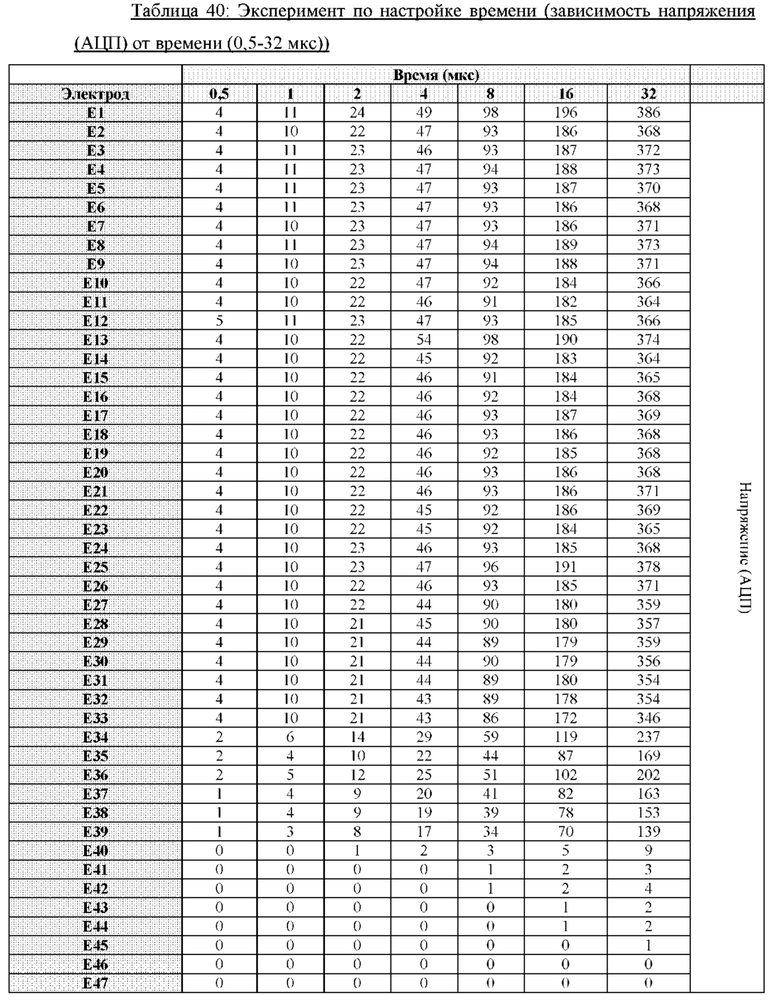

Экспериментальные результаты показали увеличение измеренного напряжения прямо пропорционально со временем.
Эксперименты по комбинированной настройке
Исходя из результатов экспериментов по настройке тока и времени, а также для выбора лучшего сочетания тока и времени с точки зрения чувствительности два электрода выбирают в качестве эталонных из воздушной среды и среды нефтепродукта. Абсолютное отличие между значениями напряжения, измеренными каждым из двух электродов (Е25-Е27), использовалось в качестве показателя чувствительности, который необходимо контролировать при тестировании всех возможных сочетаний. Отличие между двумя электродами (А) рассчитывается для всех возможных сочетаний и показано в Таблице 41, а соответствующий график показан на фиг. 36.
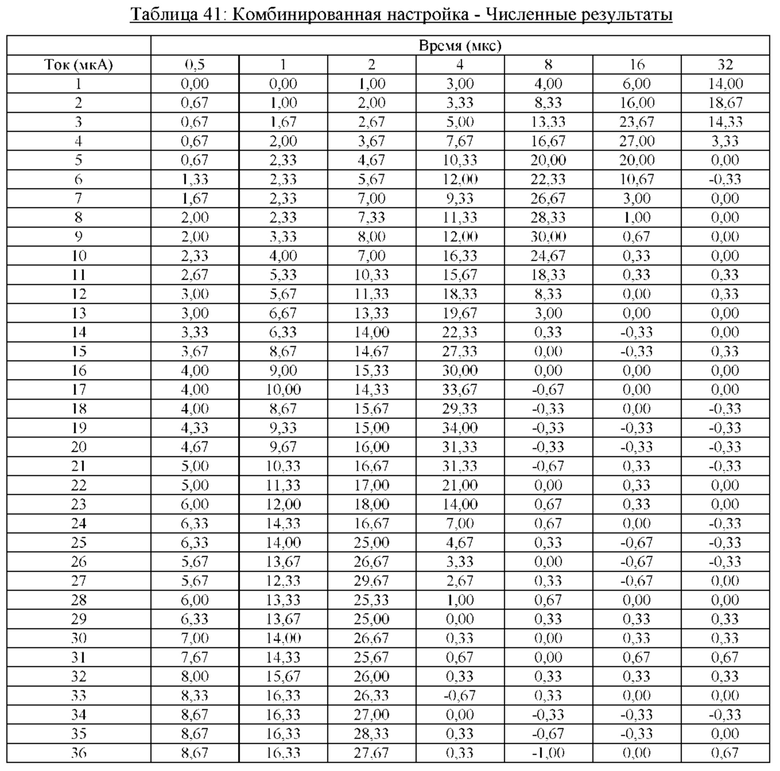
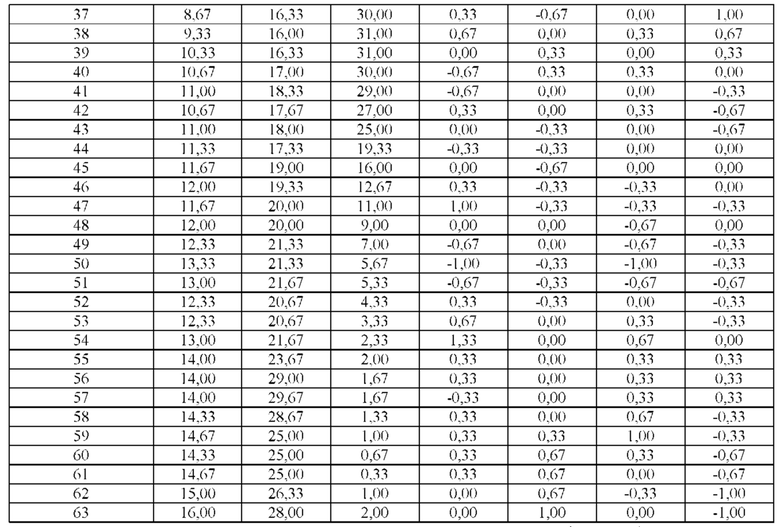
Исходя из экспериментальных результатов для настройки, было выбрано сочетание продолжительности заряда 2 мкс и величины заряда тока 32 мкА, поскольку оно обеспечивает максимальное отличие между нефтепродуктом и воздухом при обеспечении приемлемого потребления энергии и относительно высокой частоты выборки перед достижением насыщения.
Тестирование с использованием установки «Ohmsett»
Было проведено всестороннее тестирование с использованием установки «Ohmsett». Тестирование включало: 1 - тестирование емкостного датчика в закрытом помещении в бассейне (статическое состояние, вертикальное и горизонтальное движение); 2 - тестирование емкостного датчика на открытом воздухе в большом бассейне (перемещался мостиком без волн, установлен на свободно плавающем нефтесборщике и перемещался с волнами или без них).
Свойства типов нефтепродуктов, используемых в экспериментах, проводимых с использованием установки «Ohmsett», показаны в Таблице 43.
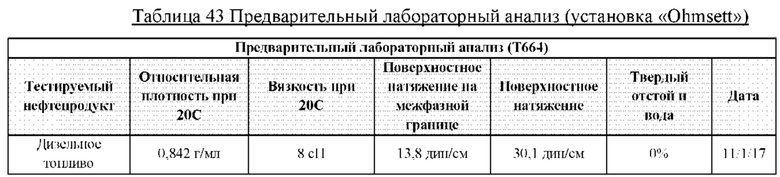
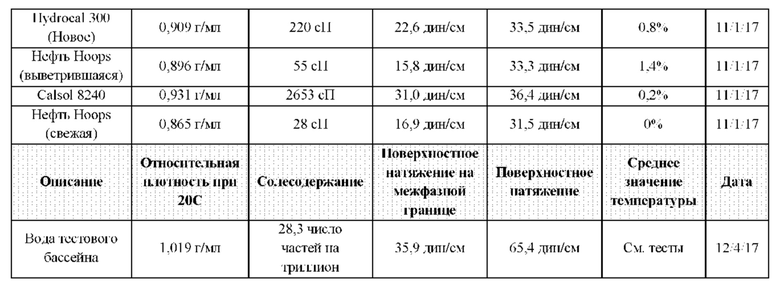
В этом примере представлены подробные результаты всех экспериментов с анализом.
Тесты погружением (Датчик №1 - Емкостный датчик)
Тесты погружением были разработаны таким образом, чтобы гарантировать относительно точную толщину пятна с различными значениями, где датчик мог быть протестирован с использованием четырех различных тестируемых нефтепродуктов. Эти тесты проводились в верхней области установки «Ohmsett» с использование небольших прозрачных стеклянных бассейнов (12,875 × 12,875 дюймов) с прозрачными боковыми сторонами, где слои нефтепродуктов известной толщины были созданы на поверхности соленой воды толщиной приблизительно 6 дюймов (152,4 мм). Начиная с нефтепродукта самой низкой вязкости, толщину увеличивали в соответствии с тестовой матрицей путем дозирования соответствующего объема с помощью градуированных цилиндров. Нефтепродукты распределяли в порядке увеличения вязкости. Датчик был установлен вручную для каждого условия инженерами AUB (Американский Университет Бейрута) и перемещался в обычном порядке при входе в тестовое пятно. Сначала датчик удерживали в неподвижном состоянии для получения исходного статического показания, после чего следовал динамический случай, предусматривающий совершение возвратно-поступательного вертикального движения в течение примерно одной минуты, а затем совершение бокового движения в направлении параллельно нефтяному пятну примерно в течение одной минуты. Экспериментальная установка, используемая при проведении тестов погружением (статический и динамический случаи), показана на фиг. 37.
Этот процесс повторялся относительно последовательным образом для каждого условия тестирования, при этом данные записывались инженерами AUB по беспроводной связи на соседний ноутбук. Серия тестов включала нефтепродукты четырех типов: дизельное топливо, сырая нефть Hoops (выветрившаяся), Hydrocal 300 и Calsol 8240. Начиная с самого тонкого пятна, каждый нефтепродукт распределялся для создания восьми различных пятен с толщиной от 0,125 до 3 дюймов (от 3,175 до 76,2 мм). Датчик извлекали из бассейна при добавлении нефтепродукта, при этом между тестами датчик не подвергался какой-либо очистке или модификации. Бассейн полностью опустошили и очистили между тестами с использованием различных типов нефтепродуктов.
Наблюдения/Примечания по установке «Ohmsett»: Эффект выпуклости над и под пятном нефтепродукта наблюдался вдоль периметра стенки бассейна, что потенциально искажало толщину. При тестировании более вязких нефтепродуктов (Hydrocal 300 и Calsol 8240) их остатки оставались на стенках градуированных цилиндров. В результате остатки постепенно накапливались, что сказывалось на общем дозируемом объеме и, возможно, искажало значение толщины, делая его меньше целевого значения.
Способ, используемый для осуществления тестов погружением, кратко описывается следующими стадиями: подготовить пятно(а) в небольшом бассейне (поверх соленой воды); вручную поместить датчик в пятно на произвольной высоте без визуального или другого выравнивания относительно пятна нефтепродукта, а затем получить показания; и удалить датчик, после чего увеличить толщину пятна и повторить.
Для всех проведенных тестов погружением добавленные объемные количества (фиг. 38) для получения требуемых значений толщин приведены в Таблице 44.
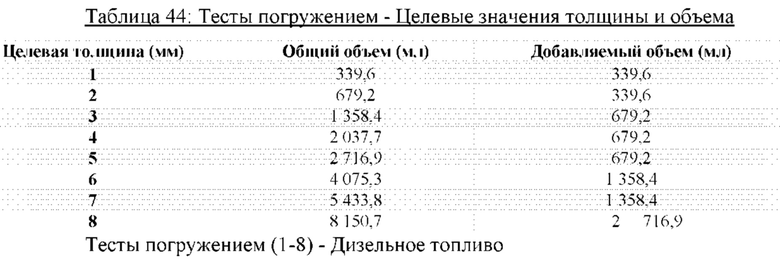
В тестах под номерами 1-8 использовалось дизельное топливо толщиной от 0,125 дюйма (3,18 мм) до 3 дюймов (76,20 мм). Температура воды и нефтепродукта была зарегистрирована в диапазоне от 69°F до 71°F. Экспериментальные результаты, показывающие измеренные значения толщины в сравнении с фактическим значением толщины, приведены в Таблице 45 для статического случая и в Таблице 46 для динамического случая. Результаты были получены с использованием алгоритма «Наивысшая точка», разработанного для легких типов нефтепродуктов (например, дизельного топлива - Hoops)

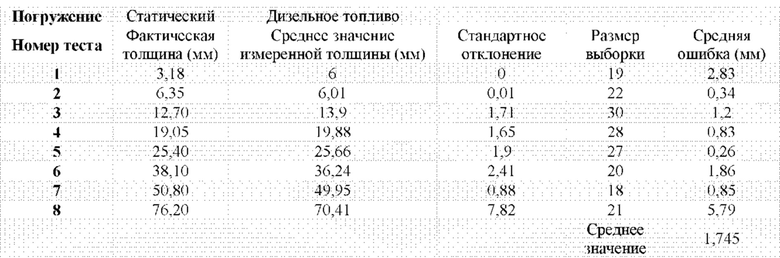
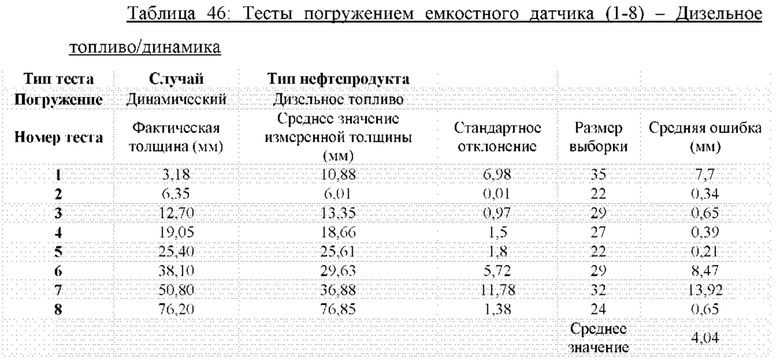
Как показано на фиг. 39 и Таблице 45, абсолютная ошибка измеренных значений толщины в статическом случае не превышает разрешающей способности датчика (3 мм) во всех осуществленных тестах (1-8), за исключением последнего теста (8), где среднее измеренное значение толщины составляет примерно 70,41 мм, а фактическое значение было оценено равным 76,2 мм. Важно отметить, что в этом случае абсолютная ошибка (5,79 мм) не превышала ошибку, вызванную ошибочной классификацией двух полос (6 мм) из сорока восьми полос, содержащихся на печатной плате датчика. Кроме того, важно отметить, что 5 из 8 статических тестов показали очень высокую точность со средней абсолютной ошибкой менее 1 мм.
В отношении динамического случая следует отметить, что, как показано в Таблице 46 и на фиг. 39, 5 из 8 динамических тестов показали очень высокую точность, при этом средняя абсолютная ошибка составляла менее 1 мм. Однако, как и ожидалось, из-за увеличенного динамического движения датчика (вертикальное и горизонтальное перемещение) количество неправильно классифицированных полос в некоторых случаях увеличивалось, что приводило к увеличению абсолютной ошибки по сравнению со статическим случаем.
Исходя из экспериментальных результатов, можно сделать вывод, что, несмотря на то, что датчик прошел большинство статических и динамических тестов с приемлемой точностью, ошибочная классификация небольшого количества электродов в динамических тестах приводила к внезапному увеличению абсолютной ошибки из-за относительно большой ширины электродов датчика (3 мм) и некоторого влияния остаточного загрязнения. Для решения этой проблемы рекомендуется уменьшить ширину электродов, чтобы увеличить разрешающую способность датчика и снизить влияние неправильно классифицированных электродов на измеренную толщину.
Тесты погружением (9-16) - нефть Hoops (выветрившаяся)
В тестах под номерами 9-16 использовалась нефть Hoops (выветрившаяся) толщиной от 0,125 дюйма (3,18 мм) до 3 дюймов (76,20 мм). Температура воды и нефтепродукта была зарегистрирована равной примерно 70°F (69°F-71,5°F). В процессе осуществления этих тестов были записаны следующие комментарии. Наблюдали покрытие нефтепродуктом поверхности датчика ниже пятна (фиг. 40); и наблюдали эффект выпуклости в контейнерах нефтепродукта (искажение фактической толщины).
Экспериментальные результаты, показывающие измеренные значения толщины в сравнении с фактическим значением толщины, приведены в Таблице 47 для статического случая и в Таблице 48 для динамического случая. Результаты были получены с использованием алгоритма «Наивысшая точка», разработанного для легких типов нефтепродуктов (например, дизельное топливо - Hoops).

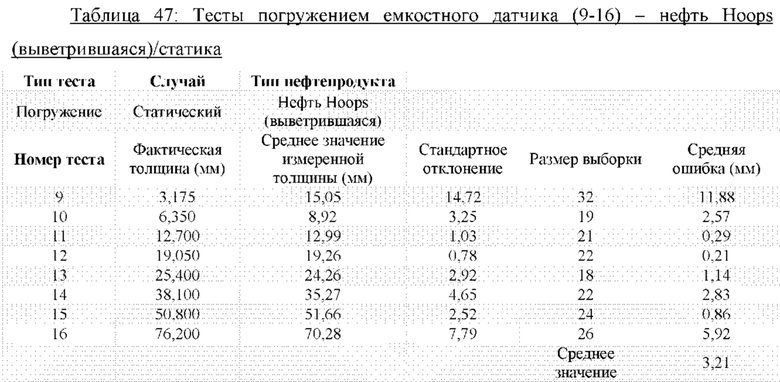

В случае статических тестов, как показано в Таблице 47, три теста (11, 12 и 15) показали очень высокую точность с абсолютной ошибкой менее 1 мм. Остальные тесты показали приемлемую точность с погрешностью примерно один-два электрода из 48 электродов, что дает абсолютную погрешность в диапазоне от примерно 1 до примерно 5 мм. Следует отметить, что наибольшая ошибка имела место в ходе первого теста (тест №9), где фактическая толщина составляет примерно 3,18 мм. Для интерпретации причины ошибки был построен график, показывающий зависимость набора измерений, полученных в ходе осуществления первого теста (теста №9), от времени (фиг. 42).
График кривой, показанный на фиг. 42, описывает причину наличия относительно большого среднего значения измерения толщины (15,05 мм) при фактической толщине примерно 3,175 мм. Когда датчик погружается в жидкость впервые, большая часть электродов покрывается слоем нефтепродукта из-за загрязнения. Вследствие эффекта загрязнения первоначальные показания датчика были относительно большими (63 мм - 52 мм - 43 мм). Кроме того, использование относительно низкой скорости изменения скользящего среднего способствует уменьшению изменения измерений датчика. Однако очевидно, что датчик достигает устойчивого состояния примерно в 7:28:35 после полудня, когда все оставшиеся измерения составляют менее 10 мм и становятся почти стабильными на 6 мм. Стоит отметить, что в статических случаях загрязнение полос, прошедших через нефтепродукт в воду, может иметь отрицательные последствия, поскольку датчик не перемещается для «смытая» загрязнения. В обычном рабочем случае пользователь может быть проинструктирован перемещать датчик, чтобы уменьшить эффект загрязнения; однако во всех наших тестах этого не делалось, чтобы не искажать результаты. Кроме того, важно отметить, что исходя из разрешающей способности датчика, которая составляет примерно 3 мм (ширина одного электрода (2 мм) + вертикальный зазор (1 мм)), этот результат считается приемлемым. Эта проблема может быть решена путем увеличения разрешающей способности датчика и ускорения скорости изменения измерения в дополнение к нанесению покрытия на датчик.
Для динамического случая, как показано в Таблице 48 и на фиг. 39, погрешность немного увеличилась из-за движения и загрязнения датчика. Тем не менее, с абсолютной ошибкой, равной менее одного электрода (3 мм) в трех тестах (10, 11 и 12) и менее двух электродов (6 мм) в других трех тестах (13, 14 и 16), результат считается приемлемым. Следует отметить, что большая ошибка произошла при первом тесте (19), и что во время выполнения этого теста было зафиксировано значительное загрязнение датчика под пятном. Что касается первого теста, когда датчик впервые полностью проходит через тонкий слой нефтепродукта, эффект загрязнения был очень высоким. Кроме того, согласно отчетам лиц, проводивших тесты, фактическая толщина слегка искажена из-за эффекта выпуклости, отмеченного в контейнерах нефтепродуктов.
Хотя большинство результатов были весьма удовлетворительными, было замечено, что эффект загрязнения был максимальным при работе с тонкими слоями нефтепродукта (Тест 9). Соответственно, возможность снижения загрязнения будет рассмотрена в контексте этого устройства измерения. Это можно сделать с помощью нескольких подходов, связанных с улучшением конструкции устройства и алгоритмов. Например, препятствующая загрязнению механическая структура, включающая в себя горизонтальные штыри, может быть дополнительно разработана путем улучшения процесса производства штырей, добавления высокочастотных вибраторов и тестирования гидрофобных химических покрытий.
Тесты погружением (18-25) - Hydrocal 300
В тестах под номерами 18-25 использовался нефтепродукт Hydrocal 300 толщиной от 0,125 дюйма (3,18 мм) до 3 дюймов (76,20 мм). Температура воды и нефтепродукта была зарегистрирована равной примерно 70°F (69°F-71°F). При выполнении первого теста (тест №18) поступило сообщение о том, что трудно равномерно покрыть поверхность нефтепродуктом при данной толщине (0,125 дюйма). Результаты измерений получены при помощи алгоритма «Скорректированная самая низкая точка», используемого для тяжелых нефтепродуктов. Экспериментальные результаты, показывающие измеренные значения толщины в сравнении с фактическим значением толщины, приведены в Таблице 47 для статического случая и в Таблице 48 для динамического случая.
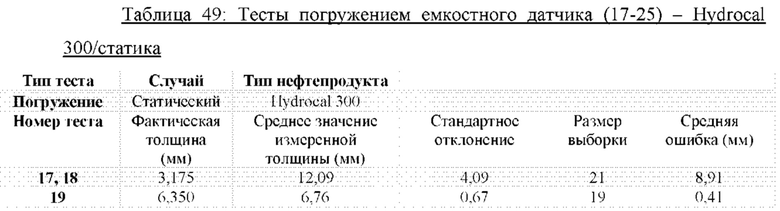

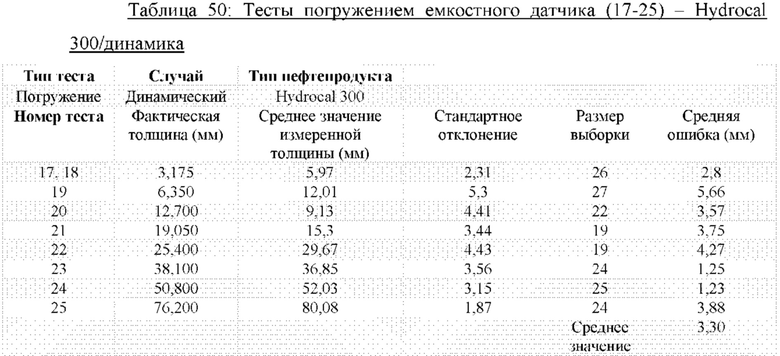
Результаты статических экспериментов с нефтепродуктом Hydrocal 300, показанные в Таблице 49, показали приемлемую точность, поскольку все тесты, кроме первого, имели абсолютную ошибку менее или примерно 3 мм, что соответствует ошибочной классификации одного электрода. Как описано ранее, и в этом случае первый тест с наименьшей толщиной нефтепродукта имел наибольшую ошибку. В динамических тестах было доказано, что алгоритм «Скорректированная самая низкая точка» дает хорошие результаты, поскольку, как показано в Таблице 50, все динамические тесты показали среднюю абсолютную ошибку в диапазоне от примерно 1 мм до максимум 5,4 мм, что соответствует ошибочной классификации менее двух электродов из сорока восьми электродов. Результаты измерений, полученные при статических и динамических тестах, относительно фактических значений толщины показаны на фиг. 43.
Тесты погружением (26-33) - Calsol 8240
В тестах под номерами 18-25 использовался нефтепродукт Calsol 8240 толщиной от 0,125 дюйма (3,18 мм) до 3 дюймов (76,20 мм). Температура воды и нефтепродукта была зарегистрирована в диапазоне от 69°F до 70,5°F. Измерения получены при помощи алгоритма «Скорректированная самая низкая точка», используемого для тяжелых нефтепродуктов.

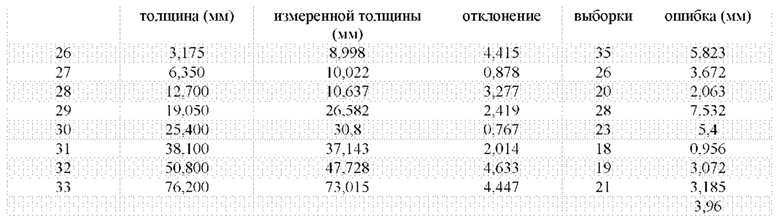
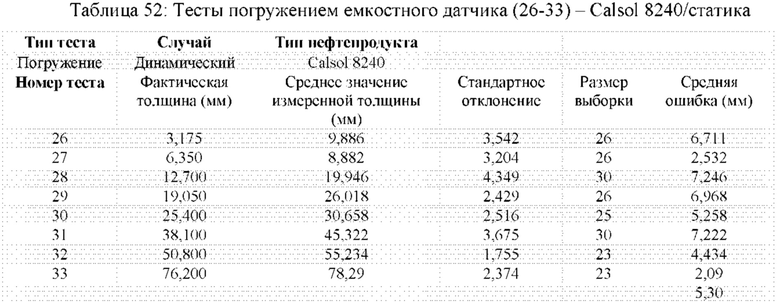
Экспериментальные результаты тестирования нефтепродукта Calsol 8240 в статическом и динамическом случаях показали высокую точность при различных значениях толщины. Например, результаты статических тестов, показанных в
Таблица 51, демонстрируют абсолютную ошибку в диапазоне от 0,956 мм (тест 31) до 5,823 мм (тест 26). Обратите внимание, что максимальная абсолютная ошибка в этом эксперименте не превышала ошибочную классификацию более двух электродов из сорока восьми. В динамическом случае, несмотря на то, что ошибка немного увеличилась из-за загрязнения и случайного перемещения датчика, абсолютная ошибка также изменялась в диапазоне от примерно 2 мм до примерно 7 мм, что представляет собой только один или два ошибочно классифицированных электрода. Как рассматривалось выше, увеличение разрешающей способности датчика за счет уменьшения толщины электродов, а также уменьшения вертикального зазора между ними способствует уменьшению эффекта ошибочной классификации. Для описания характеристик всех протестированных случаев на фиг. 44 показаны измеренные значения толщины в статическом и динамическом случаях относительно фактических значений толщины.
Тесты на открытом воздухе с установкой на мостике (емкостный датчик)
Этот тест был разработан для получения данных датчика при перемещении в поверхностных пятнах с диапазоном скоростей, которые типичны при развертывании датчика на оборудовании для ликвидации разливов или при быстром течении воды. Тестовая установка была выполнена путем подготовки канала вдоль западной стенки тестового бассейна с использованием кронштейнов для крепления стрелы, концевых панелей и секции 24-дюймовой стрелы, заполненной пеной (фиг. 45). Конечные размеры канала были следующими: ширина - 34 дюйма, длина - 58 футов, 6 дюймов. Эта номинальная область использовалась для размещения пятен с различной толщиной, как отмечено в тестовой матрице. Параметры пятна для этой серии включали значения толщины 0,25, 0,5, 1,0 и 2,0 дюйма с использованием тестируемого нефтепродукта Hydrocal 300 (тесты 34-61). Тестируемые нефтепродукты дозировали из кубовых емкостей, расположенных вдоль западной площадки, при этом значения объема определяли с использованием показателей физического зондирования глубины, преобразованных в галлоны при помощи таблицы преобразования производителя. Датчик был прикреплен к сборному креплению (AUB), которое обеспечивало возможностью поворачивать датчик вручную из развернутого положения в поднятое (выше барьера канала) положение с использованием шарнира и тягового троса. Во время тестирования технический специалист отслеживал положение датчика и при необходимости осуществлял его подъем в качестве меры предосторожности, чтобы не допустить возможное столкновение датчика с барьером. Крепление AUB и датчик были закреплены в установке «Ohmsett», при этом датчик был прикреплен к основному мостику с обеспечением вертикальной регулировки. На фиг. 45 представлена конфигурация монтажа датчика с поднятым датчиком, прикрепленным к стреле кронштейном и концевой панелью канала.
Было выполнено несколько проходов, и данные датчика собраны во время его прохождения как в северном, так и в южном направлениях со скоростью 0,5 и 1,0 узла. Проходы со скоростью 2,0 узла и выше выполнялись только в южном направлении. Всего при тестировании нефтепродукта Hydrocal 300 были записаны 28 файлов данных для установки «Ohmsett».
Наблюдения/Примечания по установке «Ohmsett»:
Действие ветра, по-видимому, вызывало аккумулирование рассматриваемого пятна в нисходящем направлении ветра. Если ветер присутствовал, он обычно дул с южного направления на фиг. 46.
Толщина целевого пятна стала меньше, в частности, в случае 2-х дюймовых пятен, так как стрела выступала наружу и, тем самым, увеличивала площадь поверхности. При перемещении датчика его передний край создавал изгибающую волну, которая могла отводить нефтепродукт от контактов датчика.
Динамические тесты (34, 60) - Hydrocal 300
Динамические тесты с нефтепродуктом Hydrocal 300 были осуществлены с использованием четырех значений толщины пятна и четырех скоростей перемещения. Тестовой областью являлся канал шириной 34 дюйма и длиной 58,5 футов, проходящий вдоль западной стенки тестового бассейна. При проведении динамических тестов использовался способ, предусматривающий следующие стадии:
Подготовить пятно определенной толщины; регистрировать измерения при движении датчика в нефтепродукте на север с тестовой скоростью, остановить; изменить направление, регистрировать измерения.
Поднять датчик, чтобы вывести его из тестовой области, опустить датчик в чистую воду бассейна, регистрировать измерения с тестовой скоростью 30 футов, изменить направление, остановить возле тестовой области, поднять датчик, чтобы переместить его в тестовую область, повторить проходы на север и юг, а также проходы в чистой воде три раза.
[001] Окружающие погодные условия, зарегистрированные при осуществлении этих тестов, показаны в
[002] Таблица 52. Результаты динамических экспериментов представлены в Таблица 53. Измерения получены при помощи алгоритма «Скорректированная самая низкая точка», используемого для тяжелых нефтепродуктов. Для каждого из тестов предоставляется среднее значение и стандартное отклонение зарегистрированных измеренных значений толщины. На фиг. 47 представлен график среднего значения измеренной толщины по сравнению с фактическими (оцененными) значениями толщины.
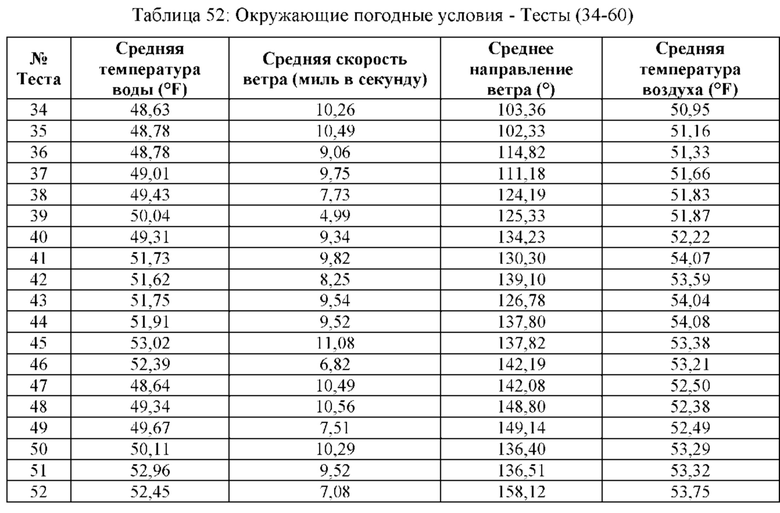
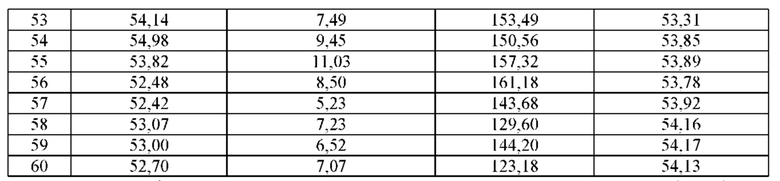
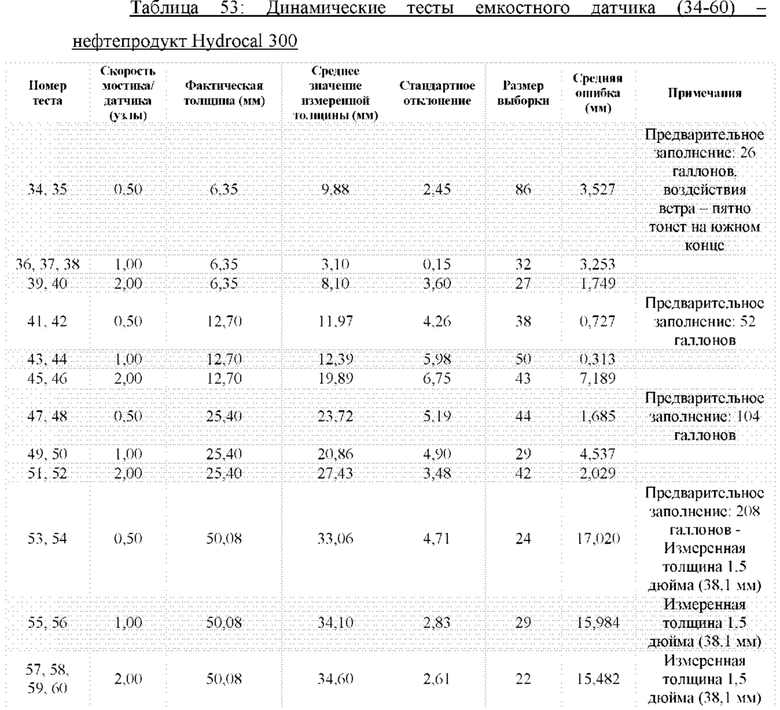
Как показано в таблице 53 и на фиг. 47, средняя абсолютная ошибка во всех тестах, выполненных при протягивании с разными скоростями в диапазоне значений толщины от приблизительно 6,35 до приблизительно 25,04 мм, находится в диапазоне от 0,313 мм до 7,1 мм в худшем случае. Однако большинство этих тестов показали впечатляющую точность абсолютной ошибки, составляющую менее 6 мм, что свидетельствует об ошибочной классификации менее двух электродов из 48 электродов. Исходя из различных сценариев тестирования, предусматривающих разные скорости и условия протягивания, этот результат считается приемлемым. Очевидно, что для последних трех тестов с номерами от 53 до 60, где фактическая расчетная толщина была зарегистрирована как 50,08 мм, имело место наибольшая абсолютная ошибка. Однако важно отметить, что для этого случая, и на основании примечаний, предоставленных к тестированию с использованием установки «Ohmsett», целевая толщина пятна стала меньше, в частности, с 2-х дюймовыми пятнами, так как стрела выступала наружу, увеличивая площадь поверхности. Кроме того, работники установки «Ohmsett» отметили, что в этом случае фактическая толщина, измеренная с помощью ручных визуальных инструментов, составила 1,5 дюйма (38,1 мм). Исходя из этого факта и принимая 38,1 мм за фактическую толщину, следует отметить, что фактическая абсолютная ошибка в этих тестах находилась в диапазоне от 4 до 5 мм, поскольку измеренные значения толщины варьировались от 33,06 до 34,60 мм.
Тесты с установкой на нефтесборщике в условиях волнения (емкостный датчик)
Целью этого теста был сбор данных о толщине пятна при установке на обычный нефтесборщик, испытывающий воздействие волнения и медленно перемещающийся в направлении волн и против них. Тестовая установка состояла из области с волнами вдоль западной стенки тестового бассейна с размерами 10 футов × 34 фута. Датчик был жестко смонтирован на раме нефтесборщика Termite компании Desmi и расположен между двумя поплавками и перед водосливом. Команда AUB и установки «Ohmsett» предоставила крепления для вертикальной регулировки. Перед тестированием нефтесборщик был помещен в тестовый бассейн, и датчик отрегулирован таким образом, что ватерлиния находилась близко к центру диапазона измерения.
На фиг. 48 показан датчик, установленный на нефтесборщике в тестовой области. Нефтесборщик был привязан тросами; при этом по одному тросу проходило к каждому из основного и вспомогательных мостиков. Из этих мест технические специалисты вручную контролировали положение нефтесборщика и медленно буксировали его по волнам. Как видно, волны подходили к нефтесборщику справа (южный конец тестового бассейна). Для этой серии тестов был предоставлен тестовый нефтепродукт Hydrocal, при этом значение толщины пятна составляло 1 и 3 дюйма. Многочисленные условия волнения были созданы и скорректированы во время тестов, чтобы обеспечить высоту волны, не превышающую рабочий диапазон датчика. Всего были записаны три файла данных для установки «Ohmsett» (тесты 90-92), в которых содержались данные профиля поверхности. Данные профиля поверхности (для анализа волн) были получены с помощью направленного в нисходящем направлении датчика расстояния (названного западный флажок), расположенного на основном мостике. Поскольку датчик был жестко закреплен на нефтесборщике, на него воздействовали такие же значения вертикальной, бортовой и килевой качки, как и на нефтесборщик, качающийся на волнах.
Тесты с установкой на нефтесборщике под номерами 90, 91 и 93 осуществлялись с использованием нефтепродукта Hydrocal 300, два значения толщины и переменные условия волнения. Способ, используемый для осуществления этих тестов, описывается следующим образом.
Емкостный датчик был установлен на нефтесборщик при помощи кронштейна, предоставленного командой AUB. Установить начальную глубину датчика, когда нефтесборщик находится в воде. Основной и вспомогательные мостики установлены с противоположных сторон тестовой области. Нефтесборщик будет привязан при помощи регулировочных тросов, проходящих к каждому мостику. Получить стационарные показатели; инициировать волнение, запустить тестирование в течение приблизительно 15 минут, переместить вручную нефтесборщик в области, как указано выше. Параметры волнения, используемые в трех тестах, приведены в Таблице 55. Окружающие погодные условия показаны в Таблице 54.
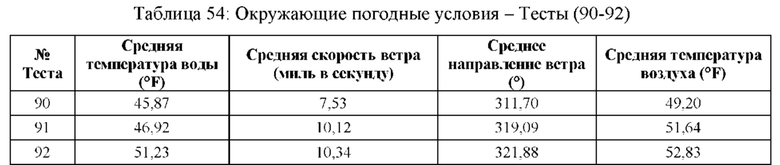
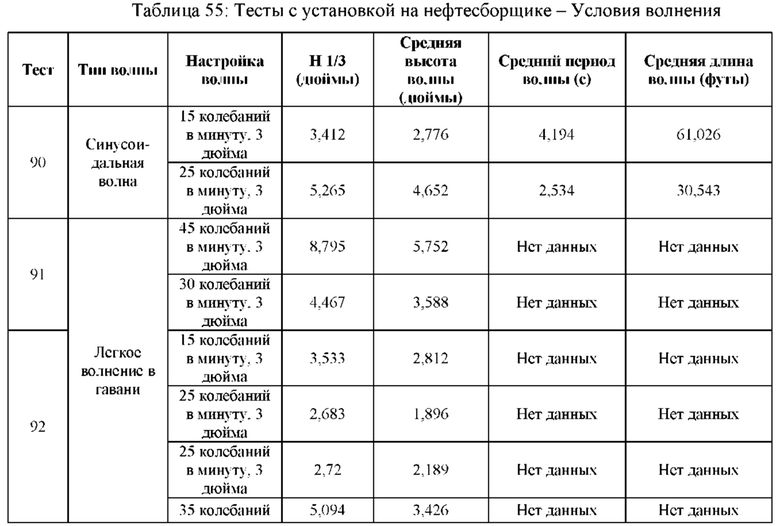

Тесты с установкой на нефтесборщике - Тест №90
Описание: установка на нефтесборщике, ручное протягивание, волнение, толщина нефтепродукта: 1 дюйм (25,4 мм), условие волнения: 9:00 до полудня - 1-я настройка: 15 колебаний в минуту, 3 дюйма; 2-я настройка: 25 колебаний в минуту, 3 дюйма.
Для первого теста были записаны три файла протокола. Средняя толщина измерения, вычисленная для каждого эксперимента с волнением, а также время начала и время конца, представлены в Таблице 56.
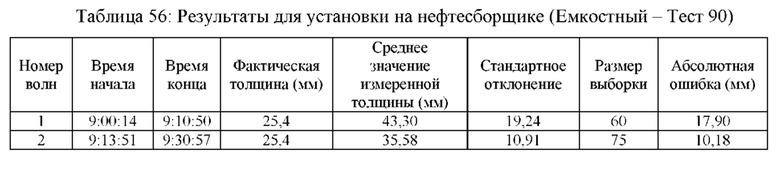
Результат синусоидального теста 90, представленный в Таблице 56, показал, что на точность датчика в основном повлияло начало волнения, далее абсолютная погрешность измерения со временем уменьшалась, даже когда было активировано второе волнение. Это связано с двумя основными факторами. Во-первых, эффект загрязнения тяжелым нефтепродуктом, вызванный накоплением нефтепродукта на корпусе датчика, увеличивает измеряемую толщину, особенно в начальной фазе волнения, когда происходит внезапный переход от спокойного состояния к волнению. Второй фактор связан со скоростью сглаживания, используемой в алгоритме. Сглаживание контролируется атрибутами скользящего среднего, при этом исходя из текущих настроек реализованная скорость скользящего среднего относительно низкая. Увеличение скорости изменения может улучшить процесс восстановления.
Тесты с установкой на нефтесборщике - Тест №91
Тест №91, тест легкого волнения в гавани. Условие волнения: 10:00 до полудня - 15 колебаний в минуту, 3 дюйма (слишком агрессивно, снижение колебаний в минуту до 30)
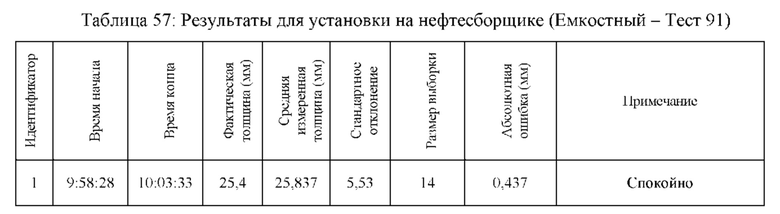

Результаты теста 91, представленные в Таблице 57, показали очень высокую точность в первые пять минут в спокойных условиях со средней абсолютной ошибкой 0,437 мм. Согласно записям, сделанным работниками установки «Ohmsett», после создания волнения датчик был погружен в воду. В это время датчик зарегистрировал 3 мм для набора измерений. Фактически, постоянные измерения в 3 мм считаются неверными, поскольку датчик находится под слоем нефтепродукта при погружении. Затем, начиная с 10:31:22, датчик выдавал корректные измерения. Исходя из среднего значения корректных измерений, полученных в третьем случае, средняя абсолютная ошибка также была приемлемой (3,54 мм). В этом случае важно обратить внимание на вызываемую погружением проблему.
Тесты с установкой на нефтесборщике - Тест №92
Тест №92, тест легкого волнения в гавани. Условие волнения: 1) 10:55 до полудня - запустили волны, 15 колебаний в минуту, 3 дюйма; 2) 11:08 до полудня - увеличили до 25 колебаний в минуту, 3 дюйма; 3) 11:18 до полудня - изменили до 25 колебаний в минуту, 4,5 дюйма; 4) 11:21 до полудня - изменили до 35 колебаний в минуту, 4,5 дюйма; 5) 11:25 до полудня - остановили волнение
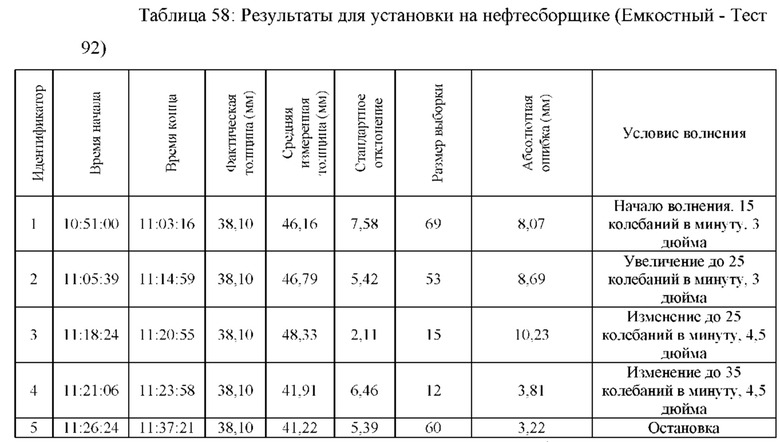
Экспериментальные результаты, представленные в Таблице 58, показывают, что средняя абсолютная ошибка измеренных значений в первых двух случаях была аналогичной (8 мм). Однако ошибка увеличилась примерно до 10 мм, когда амплитуда волнения была увеличена до 4,5 дюймов в третьем случае. При этом в последних двух случаях средняя ошибка значительно уменьшилась с остановкой волнения. Здесь важно отметить, что, несмотря на то, что на точность датчика повлияли созданные условия волнения, абсолютная средняя ошибка с точки зрения разрешающей способности датчика считалась приемлемой (10 мм = 3 полосы). И в этом случае, можно сделать вывод о том, что эффект загрязнения должен быть дополнительно уменьшен за счет будущих усовершенствований.
Альтернативная конструкция электродов для проведения измерений в условиях загрязнения
Как упоминалось ранее, эффективность компланарного датчика может ухудшиться при работе с высоковязкими жидкостями в динамических условиях. В таких ситуациях при возникновении загрязнения жидкость накапливается на корпусе датчика, вызывая ошибки в измерении емкости. Согласно этому варианту осуществления электроды датчика могут в значительной мере снизить влияние загрязнения на результаты измерения датчика. Предлагаемый вариант осуществления включает в себя многорядную конструкцию с параллельными пластинами.
Предлагаемый вариант осуществления включает в себя набор игольчатых штырей в качестве конструкции, которая может проникнуть через слой загрязнения нефтепродуктом и сфокусировать электрическое поле на целевой области вдоль оси z. Как описано ранее, одиночные штыри расположены в центре компланарных электродов первоначального варианта осуществления датчика, решая проблему загрязнения нефтепродуктом в воде. Однако согласно этому варианту осуществления компланарные электроды полностью заменены матрицей штырей, которые функционируют в качестве конденсатора с параллельными пластинами. Первый набор штырей, которые прикреплены к каждому ряду, используется для возбуждения и измерения и действует в качестве первой токопроводящей пластины конденсатора. Второй набор штырей, установленных следом за чувствительными штырями, присоединен к заземлению и действует в качестве второй пластины конденсатора с параллельными пластинами. Непроводящий материал (т.е. нефтепродукт), заполняющий зазор между чувствительными штырями и заземленными штырями, действует в качестве диэлектрика. В случае токопроводящих жидкостей, таких как морская вода, чувствительные и заземленные штыри замыкаются накоротко, что в результате приводит к существенному изменению измеряемого напряжения.
Согласно одному варианту осуществления штыри устанавливают рядом друг с другом или в отдельных ячейках в одном и том же ряду. Эффективность этого варианта была оценена на 3D-модели и посредством моделирования методом конечных элементов, которое осуществлялось с использованием пакета Maxwell, включенного в программное обеспечение ANSYS 19.0. Согласно одному варианту осуществления на фиг. 49 представлен пример использования одной чувствительной ячейки 500, состоящей из трех штырей 510, 520, 530. Центральный штырь 520 используется для возбуждения и измерения, а соседние штыри 510 и 530 присоединены к нулевому потенциалу в целях защиты. На фиг. 50 представлены три отдельные чувствительные ячейки 500а, 500b, 500с, распределенные в одном и том же ряду, при этом расстояние разделения D1 составляет приблизительно 5 мм, и на фиг. 51 представлен вариант осуществления, предусматривающий использование набора соседних чувствительных ячеек, состоящего из 11 штырей 540, которые равноудалены и отстоят друг от друга на расстоянии D2, составляющем приблизительно 2,54 мм. Расстояние разделение D1 зависит от приемлемой ширины датчика исходя из требований практического применения. Расстояние разделения D1 не влияет на принцип измерения, так как ячейки по существу изолированы друг от друга. Тем не менее, расстояние разделения D1 может варьировать от приблизительно 2 мм до приблизительно 15 мм. Штыри 540 выполнены из меди и имеют длину L1 приблизительно 10 мм и радиус приблизительно 1 мм. Радиус и длина штырей зависят от допустимой чувствительной области. Согласно одному варианту осуществления измерения с высокой разрешающей способностью радиус может варьировать от приблизительно 0,5 до приблизительно 2 мм, при этом штыри удалены друга от друга на относительно небольшое расстояние. Увеличение расстояния D1, разделяющего штыри, приводит к снижению мощности сигнала. Согласно этому варианту осуществления длина штырей может варьировать от приблизительно 2 до приблизительно 20 мм. Увеличение радиуса или длины штырей вызывает увеличение базовой емкости и должно быть учтено при проектировании измерительной аппаратуры. Каждый штырь соединен своим основанием с квадратной медной площадкой 550 длиной приблизительно 2 мм и толщиной приблизительно 0,05 мм. В соответствии с одним вариантом осуществления печатная плата 560, на которой расположены штыри, изготовлена из эпоксидного материала FR4 с диэлектрической постоянной приблизительно 4,4 и толщиной приблизительно 1,6 мм. Область моделирования была заполнена воздухом.
В первом моделировании на верхнюю поверхность печатной платы не добавляли какого-либо дополнительного материала, чтобы получить график распределения основных величин электрического поля. Как показано на фиг. 51, штыри были пронумерованы от 1 до 11, начиная с левой стороны. Напряжение возбуждения штырей 2, 4, 6, 8 и 10 составляло 2 В. Напряжение возбуждения штырей 3, 5, 7, 9 и 11 составляло 0 В. Исходя из этого распределения, пять чувствительных ячеек включены в состав чувствительного ряда, так как каждый чувствительный штырь имеет два заземленных штыря с правой и с левой сторон. Результат моделирования, представляющий величину электрического поля, показан на фиг. 49, фиг. 50 и фиг. 51.
Результат первого моделирования показал, что электрическое поле существует в пустых областях между чувствительными штырями и прерывается на концах чувствительного ряда. Прерывание электрического поля происходит из-за эффекта защиты, создаваемой заземленными штырями. Кроме того, электрическое поле было распределено по телу штырей (по оси z), что очень важно для решения проблемы загрязнения нефтепродуктом.
Второе моделирование представляло собой моделирование с постепенным изменением толщины, целью которого было оценить влияние различной толщины материала на вариант осуществления конструкции датчика. В этом моделировании используется материал из диоксида кремния с относительной диэлектрической проницаемостью приблизительно 4. Толщина материала, размещенного на верхней поверхности печатной платы, постепенно изменялась от примерно 0 мм до примерно 15 мм с приращением примерно 0,2 мм. Значения емкости, измеренные относительно значений толщины материала, в сравнении с результатами модулирования с постепенным изменением толщины, примененного к конструкциям с одной ячейкой и тремя ячейками, показаны на фиг. 52.
Результаты модулирования с постепенным изменением толщины показали линейную зависимость между измеренной емкостью и толщиной материала. Кроме того, чувствительность датчика увеличилась в этом варианте осуществления, что определено из наклонов кривых, показанных на фиг. 52.
Экспериментальная оценка штыревых конструкций в сравнении компланарными конструкциями
Для подтверждения анализа, сделанного с помощью моделирования, были реализованы и протестированы несколько вариантов осуществления. На фиг. 53 представлены реализованные варианты осуществления 600-660 печатной платы, включающие в себя набор компланарных конструкций (чередующаяся 600, спиральная 610, концентрическая 620 и параллельная 630) и трех штыревые конструкции, 10-ти ячеечный штыревой вариант осуществления 640, 3-х ячеечный штыревой вариант осуществления 650 и одноячеечный штыревой вариант осуществления 660.
Эти варианты осуществления были протестированы в соответствии со следующими критериями. Во-первых, с целью регистрации базовой емкости измеритель иммитанса (BK Precision 875В) использовался для измерения емкости вариантов осуществления в воздухе. Измерения проводились в помещении при температуре окружающей среды около 25°С. Затем была измерена максимальная емкость для каждого варианта осуществления 600-660 при полном погружении в нефтепродукт. Эксперименты осуществлялись с использованием трансмиссионного смазочного нефтепродукта (SAE 140). В экспериментах использовался цилиндрический контейнер для жидкости, имеющий диаметр примерно 8 см и высоту примерно 9 см. Емкость, измеренная в воздухе и нефтепродукте, а также абсолютные отличия (АО) кратко описаны на фиг. 54.
Результаты измерений показали, что для всех вариантов осуществления 600-660 максимальные значения емкости (нефтепродукт) были меньше максимальных значений емкости, регистрируемых при моделировании. Это связано с тем, что диэлектрическая постоянная нефтепродукта (≈2) меньше диэлектрической постоянной материала, используемого при моделировании (диоксида кремния). Измеренные базовые значения емкости компланарных концентрических и параллельных конструкций совпадали со значениями емкости, регистрируемыми при моделировании. Кроме того, две конструкции показали идентичное изменение емкости (приблизительно 1 пФ) после погружения в нефтепродукт. Этот результат демонстрирует высокую степень согласованности с результатами моделирования, где две модели показали почти идентичные результаты изменения из-за присутствия тестируемого материала.
Измерения показали, что чередующаяся конструкция обеспечивает наибольшую чувствительность в сравнении с другими компланарными конструкциями. Важно отметить, что динамический диапазон чередующейся конструкции был вдвое больше динамического диапазона параллельной и концентрической конструкций как при моделировании, так и при измерениях. Спиральная конструкция (не использованная при моделировании) показал аналогичную чувствительность к чередующейся конструкции. Однако чередующаяся конструкция предпочтительнее из-за меньшей площади.
Для штыревых конструкций измерения показали, что их средняя базовая емкость меньше средней базовой емкости компланарных конструкций. Например, 3-х ячеечный штыревой вариант осуществления 650 имеет чувствительность выше чувствительности компланарных параллельной и концентричной конструкций при меньшей базовой емкости. Кроме того, измерения показали, что чувствительность штыревых датчиков увеличивается при добавлении дополнительных ячеек.
10 ячейковый штыревой вариант осуществления 640 обладал максимальной чувствительностью при промежуточной базовой емкости. Таким образом, это результат демонстрирует то, что штыревые варианты осуществления эффективно улучшают способность датчика различать разные диэлектрические материалы и, вместе с тем, смягчать проблему загрязнения нефтепродуктом за счет проникновения через слой нефтепродукта, накапливаемый на теле датчика.
Используемые в настоящей заявке термины «компонент» и «система» предназначены для обозначения относящегося к компьютеру объекта, такого как аппаратное обеспечение, сочетание аппаратного обеспечения и программного обеспечения, программное обеспечение или программное обеспечение в процессе выполнения. Например, компонент может представлять собой, кроме прочего, процесс, выполняемый процессором, процессор, объект, исполняемый файл, поток исполнения, программу и/или компьютер. В качестве иллюстрации следует отметить, что компонентом может быть как приложение, выполняемое на сервере, так и сам сервер. Один или несколько компонентов могут входить в состав процесса и/или потока исполнения, и компоненты могут быть локализированы на одном компьютере и/или распределены среди двух или более компьютеров.
Как правило, программные модули включают в себя процедуры, программы, компоненты, структуры данных и подобные элементы, которые выполняют конкретные задачи или реализуют конкретные абстрактные типы данных. Более того, специалистам в данной области техники будет понятно, что способы согласно настоящему изобретению могут быть применены на практике с другими конфигурациями компьютерных систем, включая однопроцессорные или многопроцессорные компьютерные системы, миникомпьютеры, мэйнфреймы, а также персональные компьютеры, портативные вычислительные устройства, микропроцессорную или программируемую бытовую электронику и т.п., при этом каждое из перечисленных устройств может быть функционально подключено к одному или нескольким связанным устройствам.
Проиллюстрированные аспекты настоящего изобретения также могут быть осуществлены на практике в распределенных вычислительных средах, где определенные задачи выполняются удаленными устройствами обработки данных, которые связаны через сеть передачи данных. В распределенной вычислительной среде программные модули могут располагаться как на локальных, так и на удаленных запоминающих устройствах.
Компьютер обычно включает в себя множество машиночитаемых носителей. Машиночитаемые носители могут быть любыми доступными носителями, к которым может получить доступ компьютер, и включают в себя энергозависимые и энергонезависимые носители, съемные и несъемные носители. Например, кроме прочего, машиночитаемые носители могут включать в себя компьютерные носители данных и коммуникационные среды. Компьютерные носители данных включают в себя энергозависимые и энергонезависимые, съемные и несъемные носители, реализованные с помощью любого способа или методики для хранения информации, такой как машиночитаемые инструкции, структуры данных, программные модули или другие данные. Компьютерные носители данных включают в себя, помимо прочего, ПЗУ, ОЗУ, ЭППЗУ, флэш-память или другую технологию памяти, CD-ROM, цифровой универсальный диск (DVD) или другое хранилище на основе оптических дисков, магнитные кассеты, магнитную ленту, хранилище на основе магнитных дисков или другие магнитные запоминающие устройства или любой другой носитель, который может использоваться для хранения желаемой информации и к которому компьютер может получить доступ.
Коммуникационные среды обычно воплощают машиночитаемые инструкции, структуры данных, программные модули или другие данные в модулированном сигнале данных, таком как несущая волна или другой механизм передачи, и включают в себя любые среды доставки информации. Термин «модулированный сигнал данных» означает сигнал, имеющий одну или несколько характеристик, заданных или измененных таким образом, чтобы кодировать информацию в сигнале. Например, кроме прочего, коммуникационные среды включают в себя проводные среды, такие как проводная сеть или прямое проводное соединение, и беспроводные среды, такие как акустические, радиочастотные, инфракрасные и другие беспроводные среды. Комбинации любых из вышеперечисленных сред и носителей также должны быть включены в объем понятия машиночитаемые носители.
Программное обеспечение включает в себя программные приложения и алгоритмы. Программное обеспечение может быть реализовано в интеллектуальном телефоне, планшете или персональном компьютере, в облаке, на носимом устройстве или другом вычислительном устройстве или устройстве обработки данных. Программное обеспечение может включать в себя логи, журналы, таблицы, игры, записи, сообщения, SMS-сообщения, веб-сайты, диаграммы, интерактивные инструменты, социальные сети, VOIP (протокол передачи голоса через Интернет), электронную почту и видео.
Согласно некоторым вариантам осуществления некоторые или все функции или процессы, описанные в данном документе, выполняются компьютерной программой, которая сформирована из машиночитаемого программного кода и воплощена на машиночитаемом носителе. Фраза «машиночитаемый программный код» включает в себя любой тип компьютерного кода, в том числе исходный код, объектный код, исполняемый код, микропрограммное обеспечение, программное обеспечение и т.п. Фраза «машиночитаемый носитель» включает в себя любой тип носителя, к которому может получить доступ компьютер, например постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), жесткий диск, компакт-диск (CD), цифровой видеодиск (DVD) или любой другой тип памяти.
Все публикации и заявки на выдачу патента, упомянутые в настоящем описании, включены в настоящий документ посредством ссылки в той же степени, как если бы каждая отдельная публикация или заявка на выдачу патента была специально и индивидуально указана для включения посредством ссылки.
[1] Texas Advanced Optoelectronic Solutions Inc., "TSL230R-LF, TSL230AR-LF, TSL230BR-LF Programmable Light-to-frequency Converters," TAOS079A, October 2006.
[2] RLX COMPONENTS s.r.o. Electronic Components Distributor, "Light to Frequency Board (MIKROELEKTRONIKA)," [Online]. Available: http://rlx.sk/en/measurement-boards/448-light-to frequency-board-mikroelektronika.html. [Accessed: Feb-2017].
[3] Mikroelektronika, "Light to Frequency Additional Board - User Manual," 2017.
[4] Electronics Katranji Trading (EKT), "412 CH GPS SKM53 MODULE," [Online]. Available: http://www.ekt2.com/products/productdetails/412_CH_GPS_SKM53_MODULE. [Accessed: Feb-2017].
[5] Electronics Katranji Trading (EKT), "412 Arduino NANO 3.0 328 CH340," [Online]. Available: http://www.ekt2.com/products/productdetails/412_ARDUINO_NANO_3.0_328_CH340. [Accessed: Feb-2017].
[6] Electronics Katranji Trading (EKT), "412 Arduino WIRELESS TRANSCEIVER 2.4Ghz," [Online]. Available: http://www.ekt2.com/products/productdetails/412_ARDUINO_WIRELESS_TRANSCEIVER_2.4Ghz [Accessed: Feb-2017].
[7] Electronics Katranji Trading (EKT), "8 D37 MALE PCB," [Online]. Available: http://ekt2.com/products/productdetails/8_D37_MALE_PCB. [Accessed: Feb-2017].
[8] Electronics Katranji Trading (EKT), "8 D37 FEM PCB," [Online]. Available: http://ekt2.com/products/productdetails/8_D37_FEM_PCB. [Accessed: Feb-2017].
[9] Nano Protech, "Super Electrical Insulation Nano Protech," [Online]. Available: http://www.nanoprotech.mk/home-page/super-electrical-insulation/. [Accessed: Feb-2017].
[10] Freescale Semiconductor, "Proximity Capacitive Touch Sensor Controller MPR121," Technical Data Sheet, 2013.
[13] "Ultra Ever Dry | Slovenija". Ultraeverdry.si. N.p., 2017. Web. 29 Mar. 2017.
[14] "Ultratech | Ultra-Ever Dry | Ultratech International". Spillcontainment.com. N.p., 2017. Web. 29 Mar. 2017.
[15] Hartigan, J. A. et al. "Algorithm AS 136: A K-Means Clustering Algorithm." Journal of the Royal Statistical Society. Series С (Applied Statistics) 28, no. 1 (1979): 100-08. doi: 10.2307/2346830.
F.N. Toth, et al., "A planar capacitive precision gauge for liquid-level and leakage detection," IEEE Trans. Instrum. Meas., vol. 46, no. 2, pp. 644-646, 1997.
S.C. Bera, et al. "A low-cost noncontact capacitance-type level transducer for a conducting liquid," IEEE Trans. Instrum. Meas., vol. 55, no. 3, pp. 778-786, 2006.
B. Kumar, et al., "A Review on Capacitive-Type Sensor for Measurement of Height of Liquid Level," Meas. Control, vol. 47, no. 7, pp. 219-224, 2014.
H. Canbolat, "A novel level measurement technique using three capacitive sensors for liquids," IEEE Trans. Instrum. Meas., vol. 58, no. 10, pp. 3762-3768, 2009.
Хотя настоящее изобретение было описано в связи с различными вариантами осуществления, следует понимать, что настоящее изобретение допускает дополнительные модификации. Эта заявка предназначена для охвата различных вариаций, практических применений или адаптации настоящего изобретения в соответствии с его общими принципами, включая такие отступления от настоящего раскрытия, которые соответствуют известной или обычной практике в области техники, к которой относится изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2190195C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОТЕРЬ В СЛОЕ ОТЛОЖЕНИЙ НА РАБОЧЕЙ ПОВЕРХНОСТИ ЕМКОСТНЫХ ДАТЧИКОВ | 2000 |
|
RU2180730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЛАГОСОДЕРЖАНИЯ ГАЗОВ | 2013 |
|
RU2548061C1 |
| Система датчика для измерения уровня поверхности раздела в многофазных флюидах | 2013 |
|
RU2652148C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКИХ И СЫПУЧИХ СРЕД В РЕЗЕРВУАРАХ | 2023 |
|
RU2805766C1 |
| ЭЛЕКТРОЕМКОСТНЫЙ СЕПАРАТОР И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2024 |
|
RU2827919C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ГРАНИЦЫ РАЗДЕЛА ФАЗ В РАССЛОЕННОМ ВОДОНЕФТЯНОМ ПОТОКЕ | 2009 |
|
RU2439504C2 |
| ДИСКРЕТНЫЙ ЁМКОСТНЫЙ УРОВНЕМЕР | 2023 |
|
RU2808936C1 |
| СПОСОБ ЭЛЕКТРОЕМКОСТНОЙ ВЛАГОМЕТРИИ ВОДОНЕФТЯНЫХ ЭМУЛЬСИЙ В ПОТОКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383885C1 |
| Система и способ измерения уровня поверхности раздела в многофазных флюидах | 2013 |
|
RU2640090C2 |
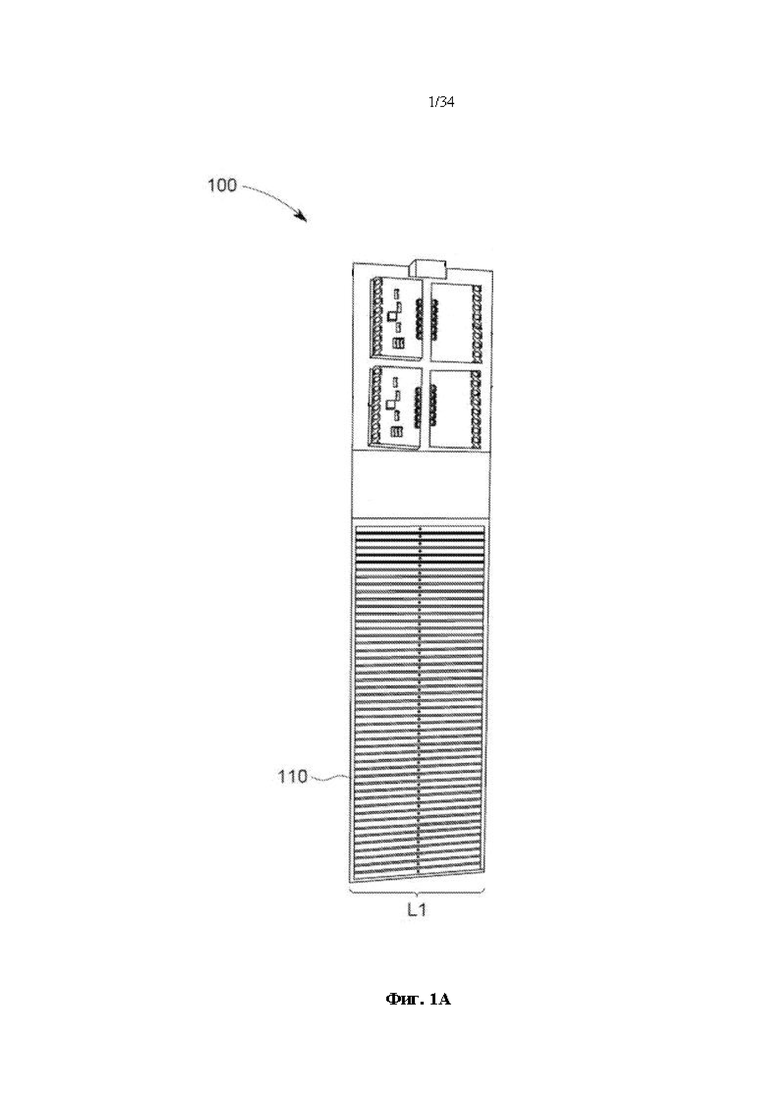
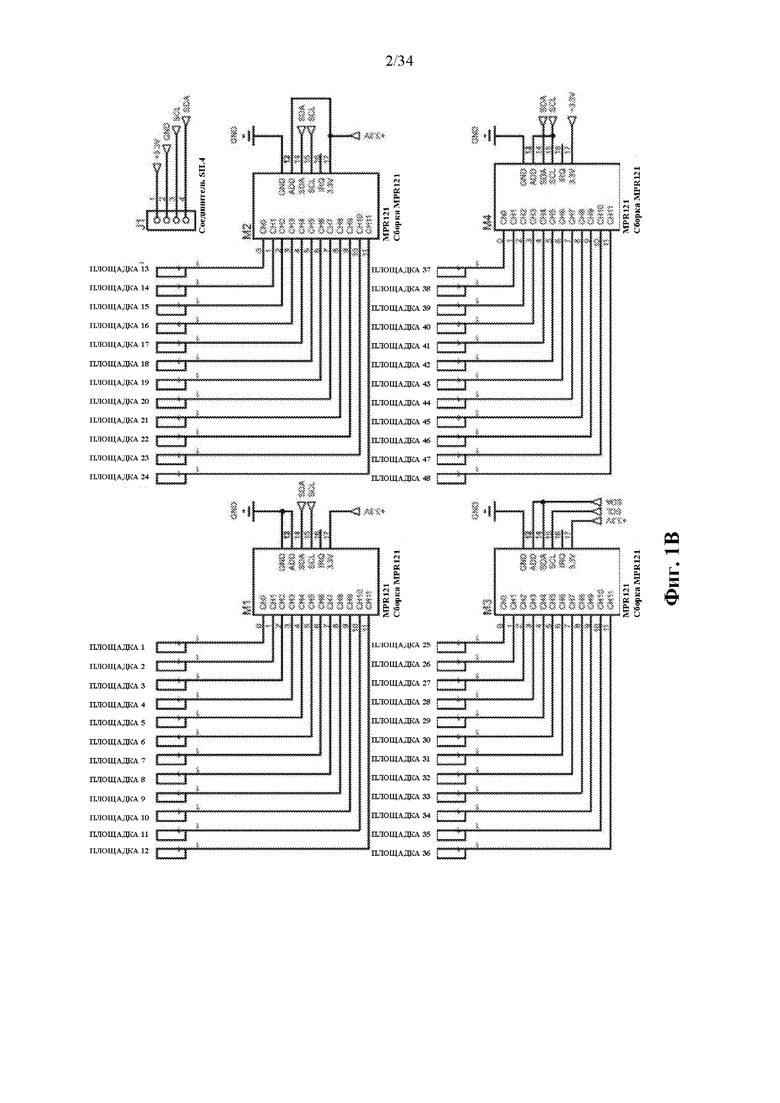
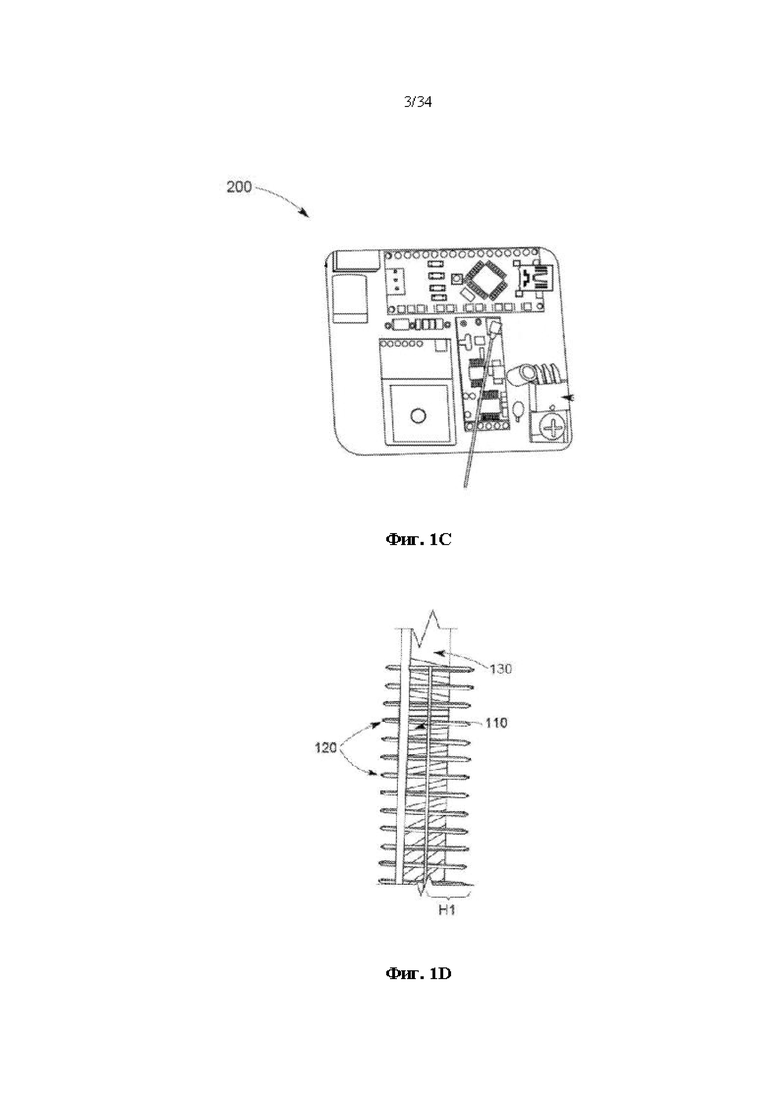
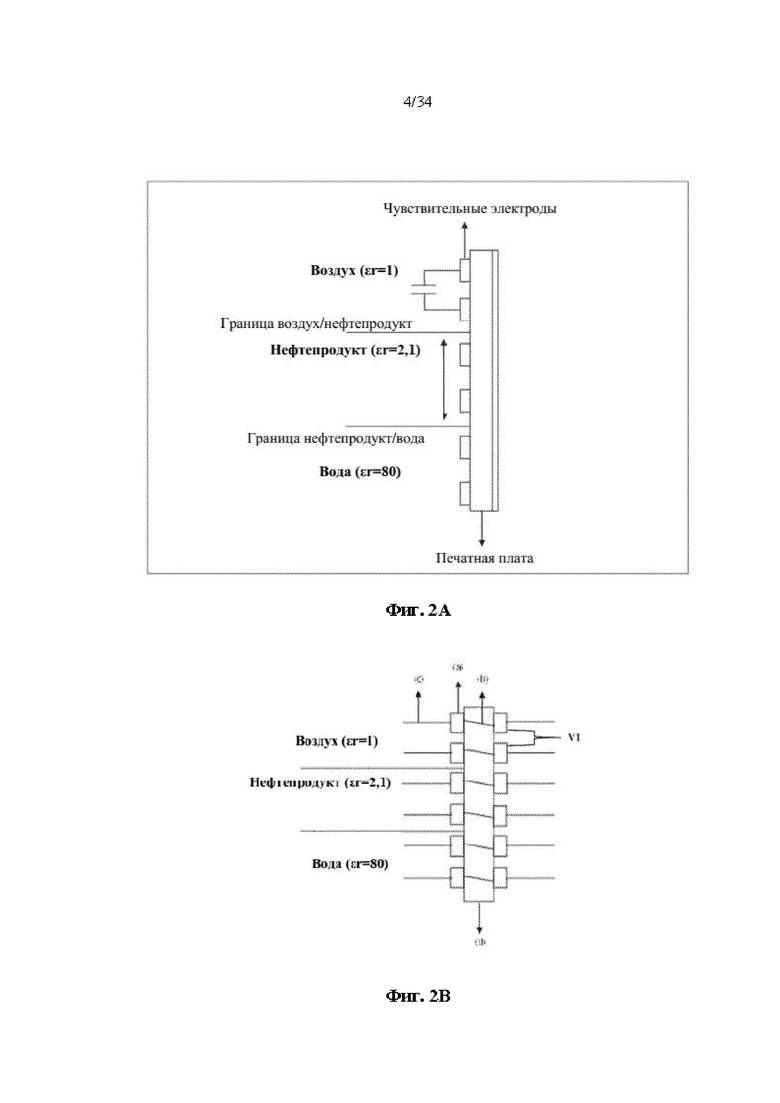
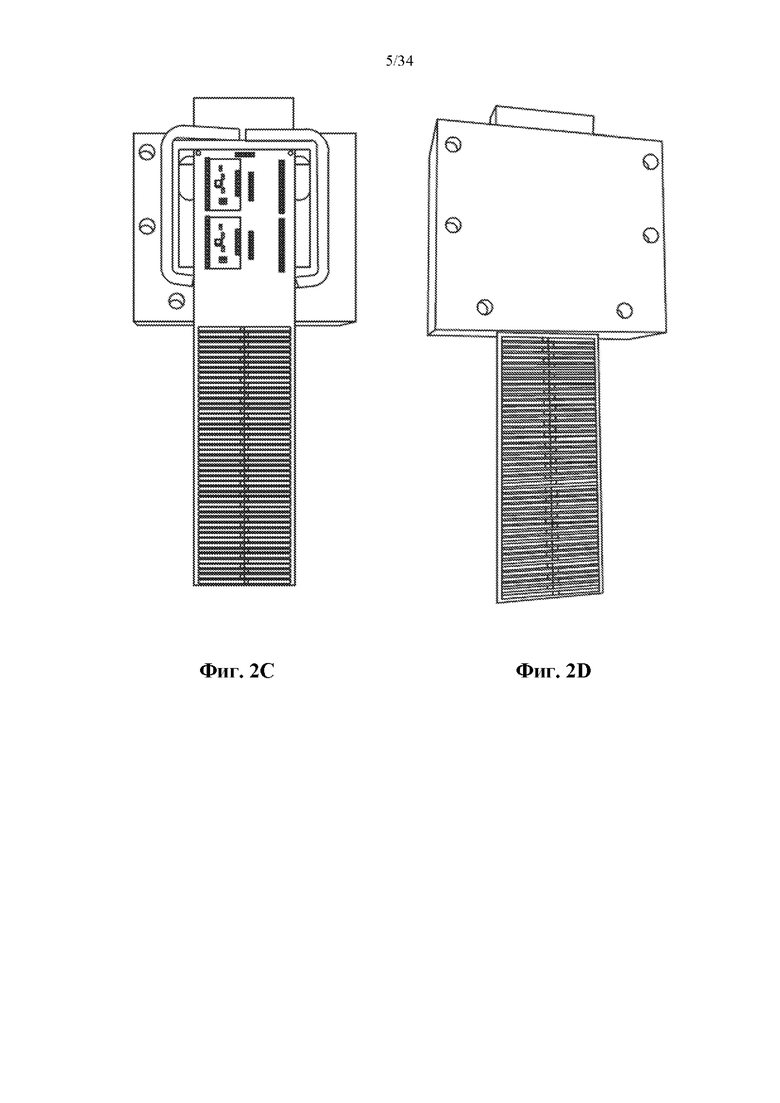
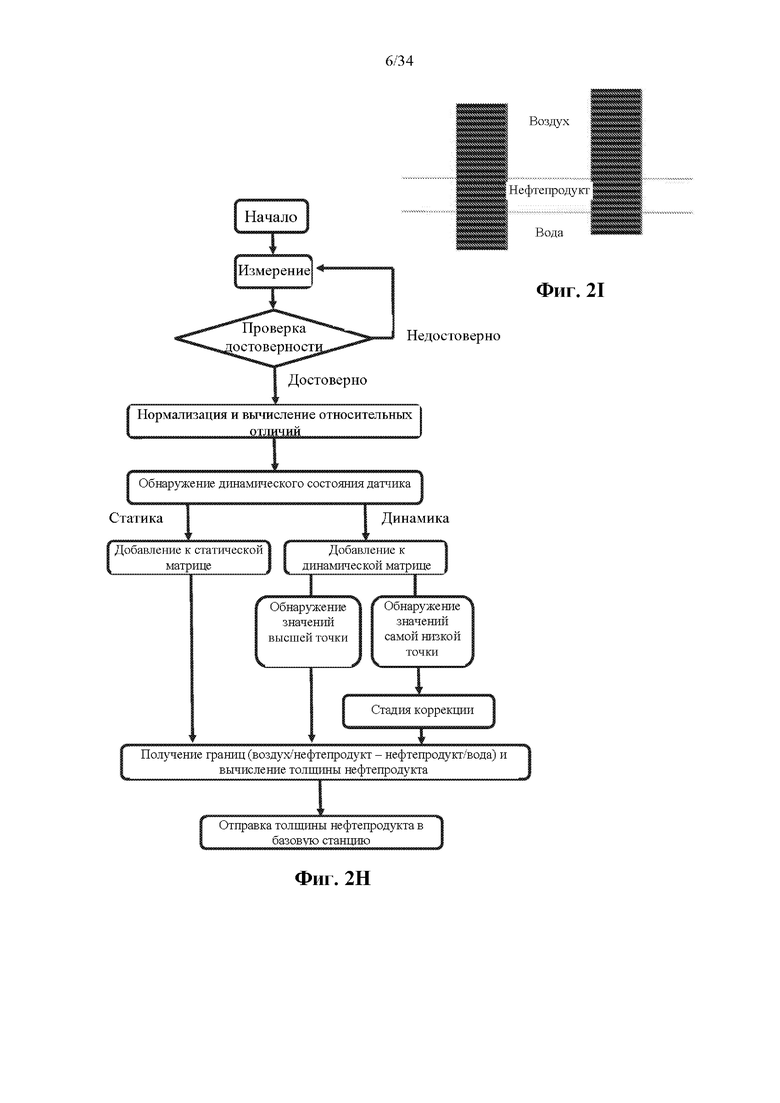
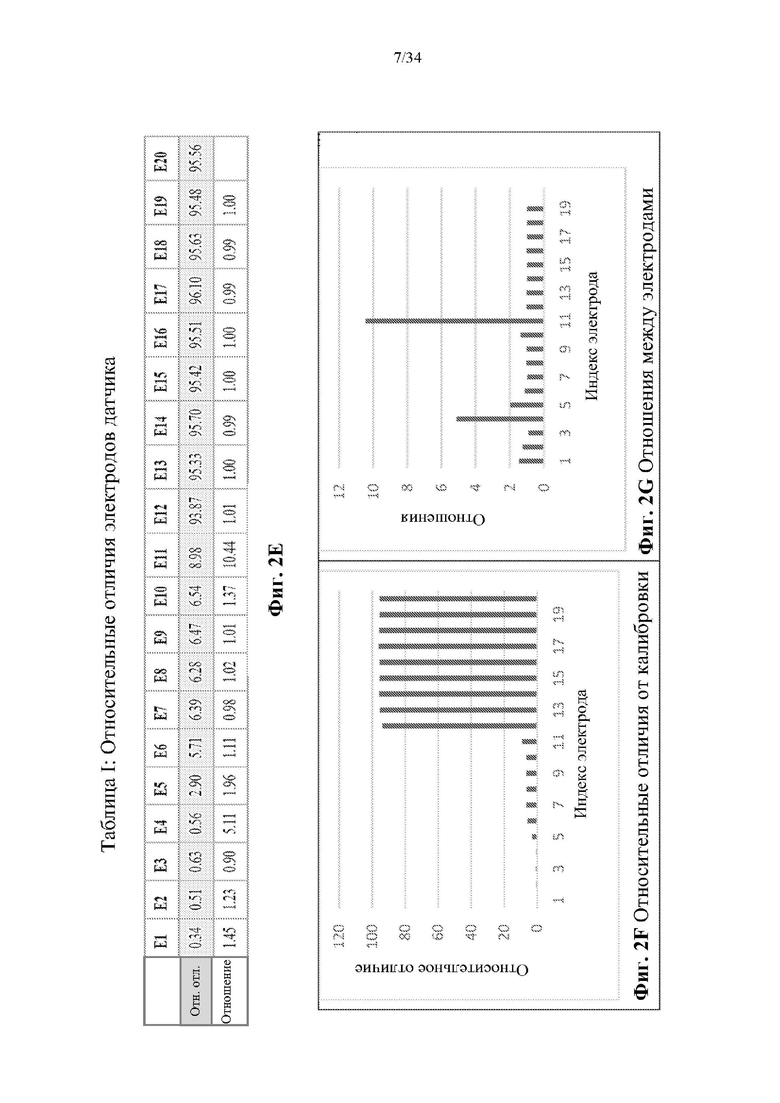
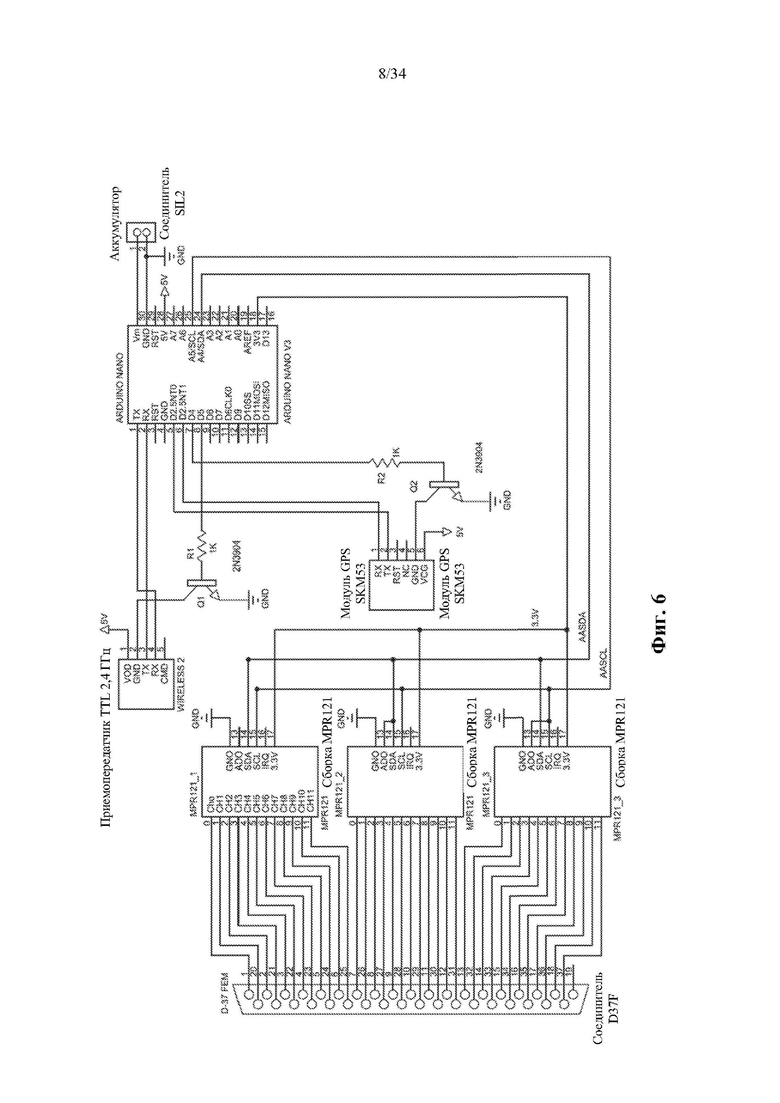
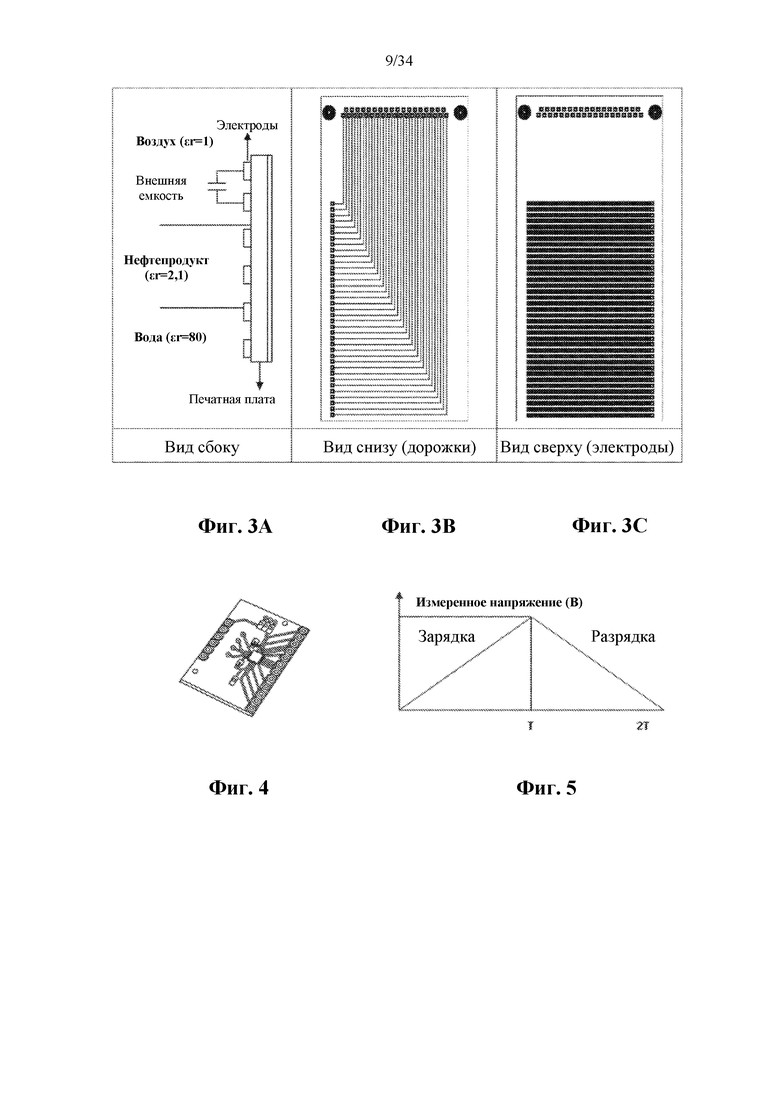
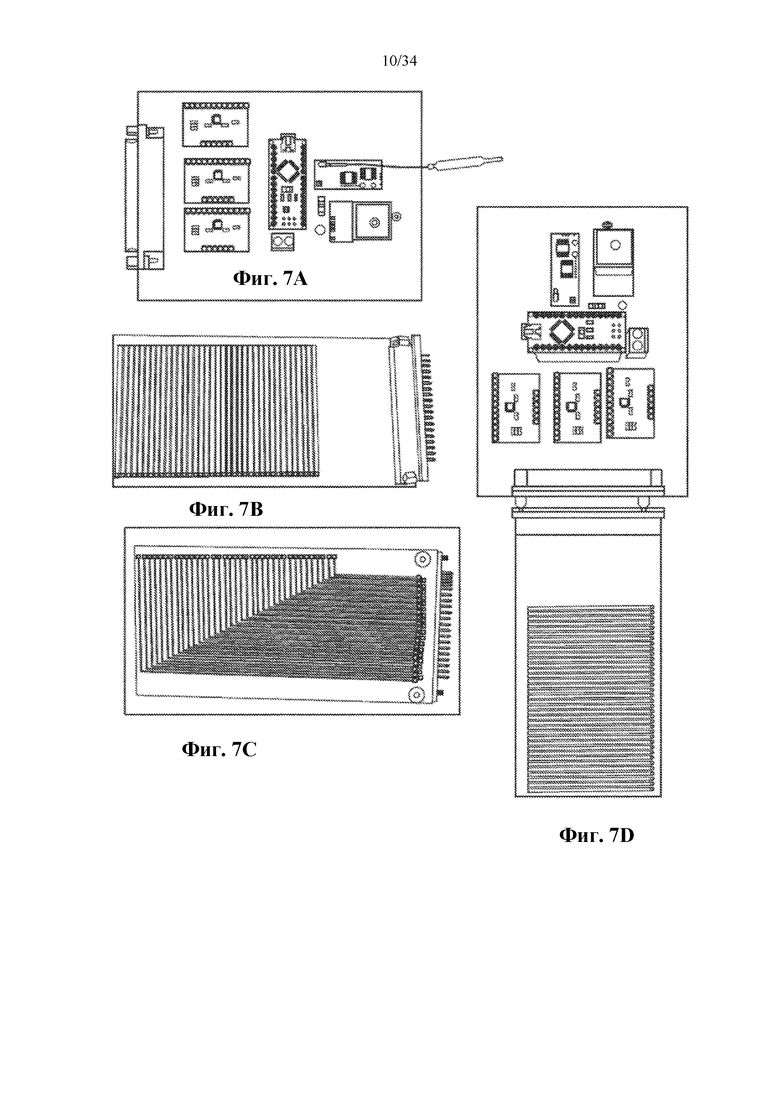
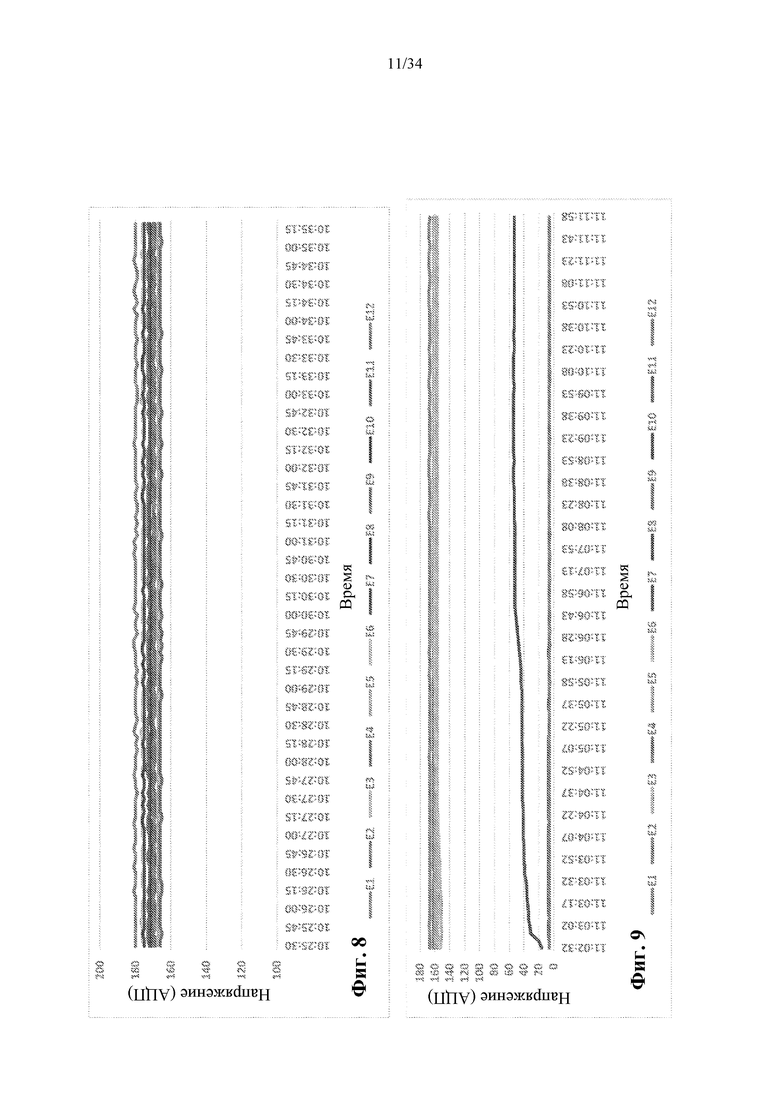
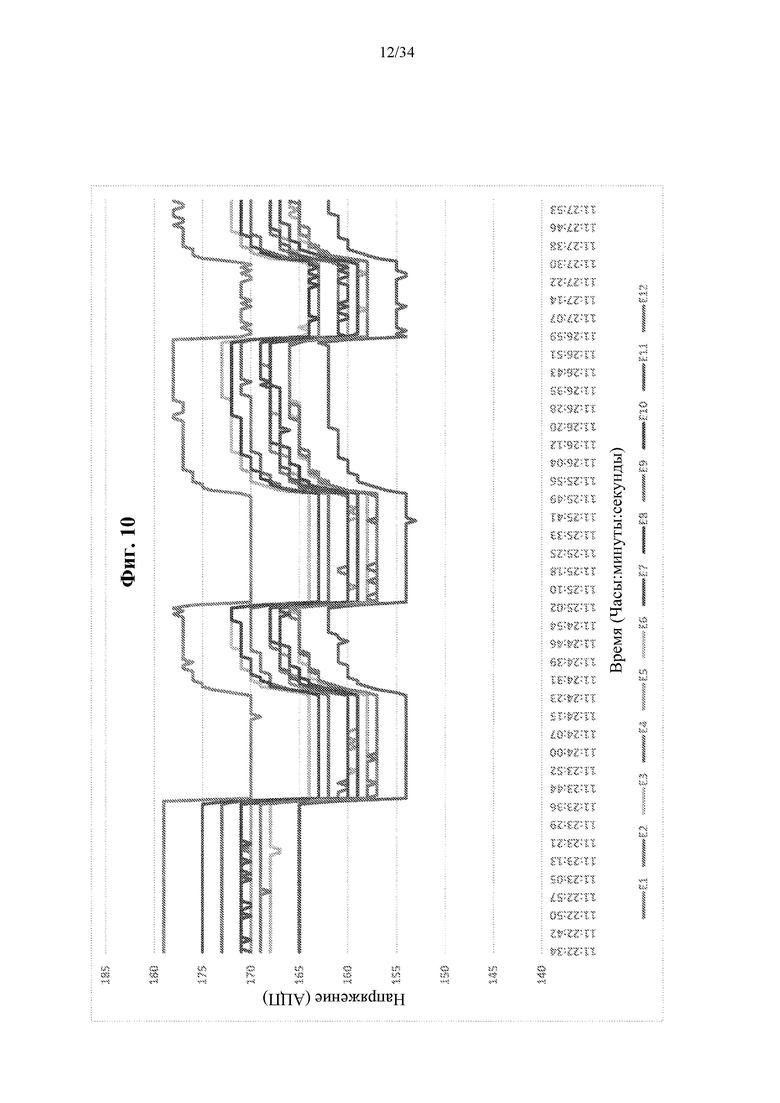
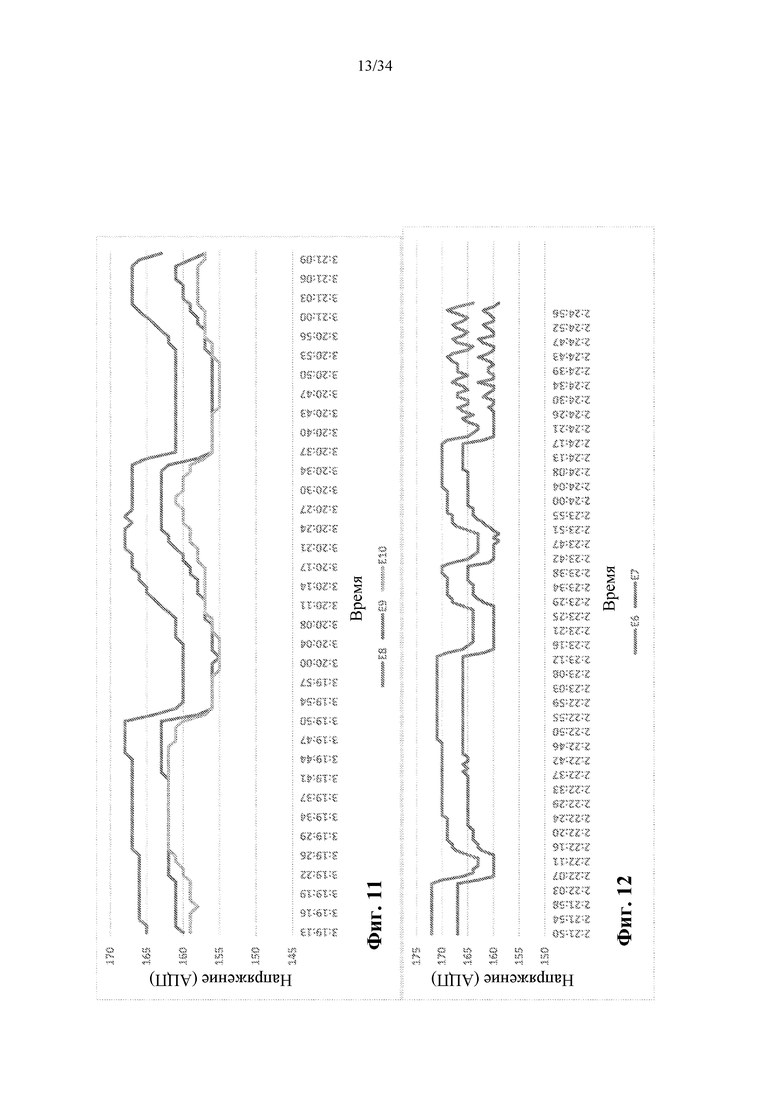
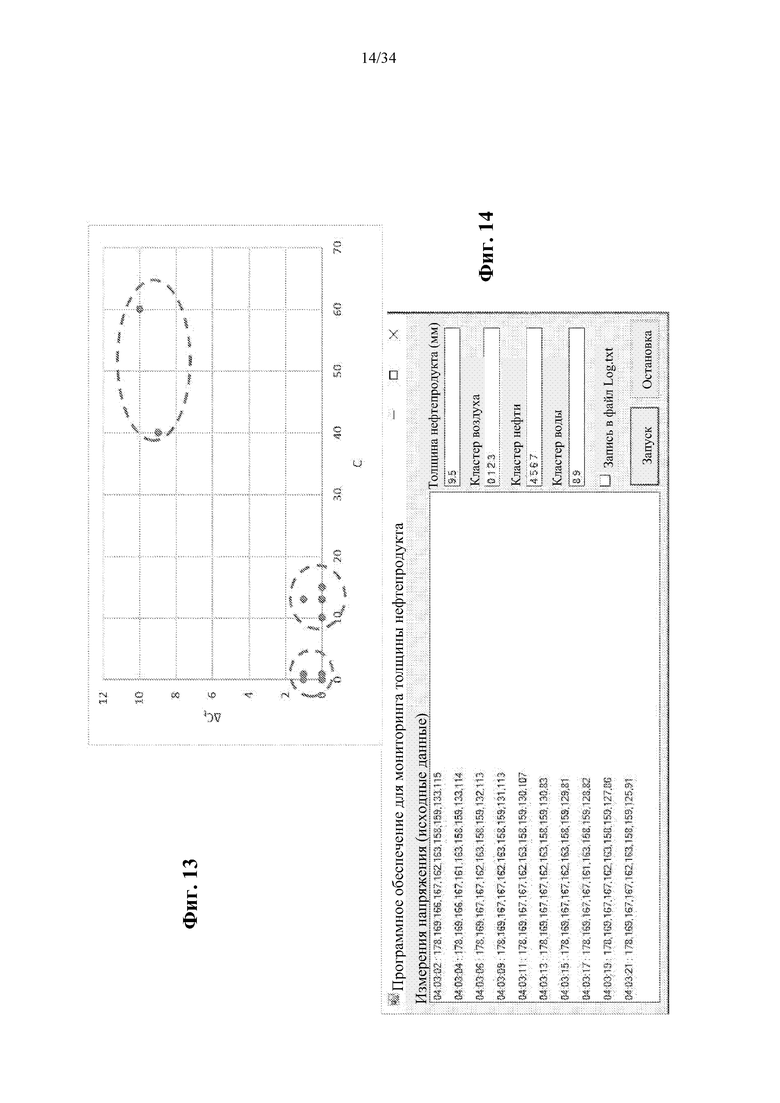
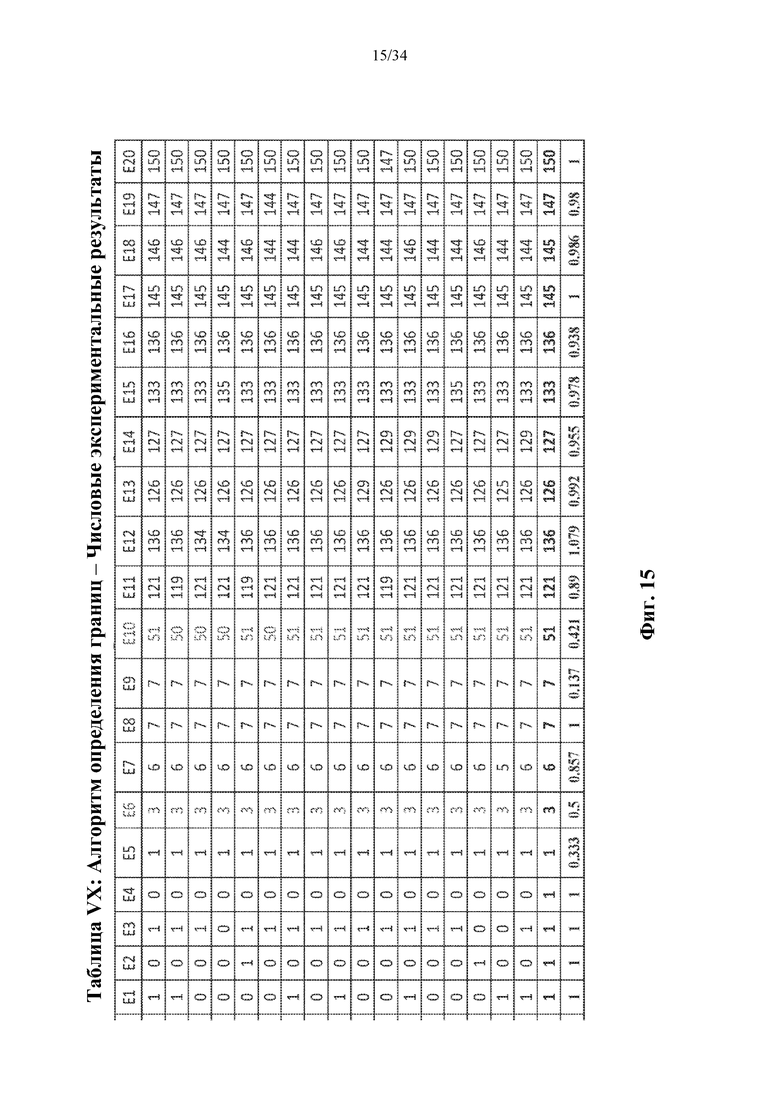
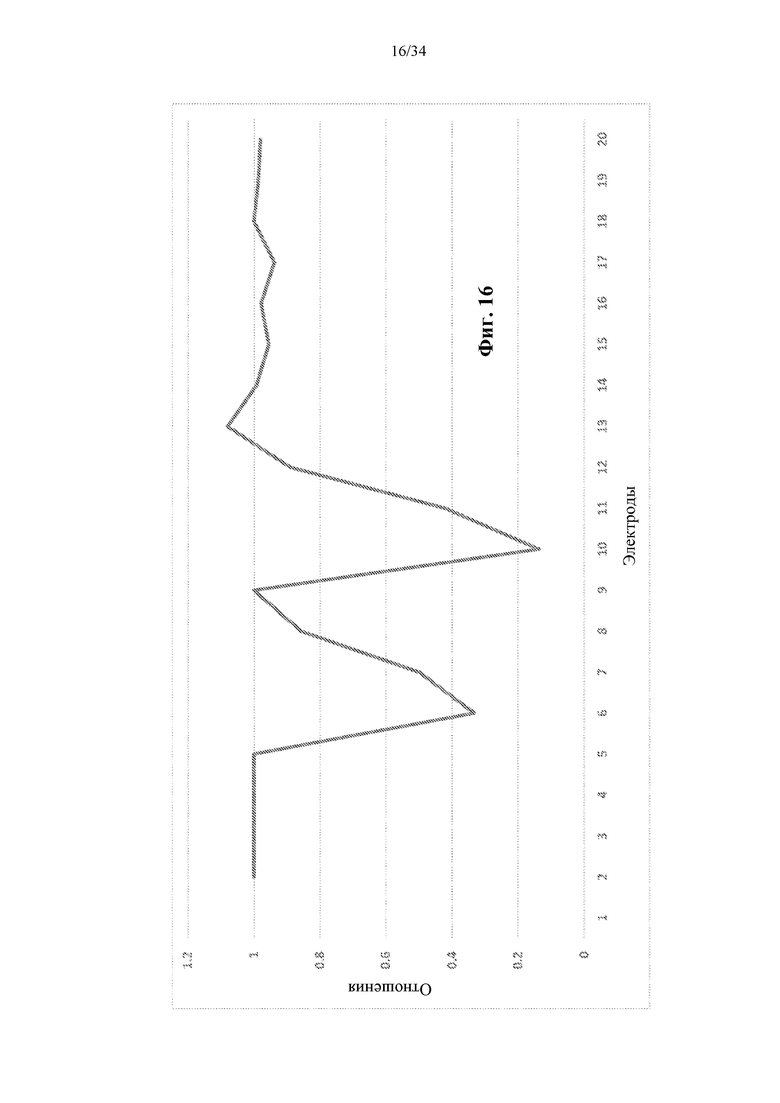
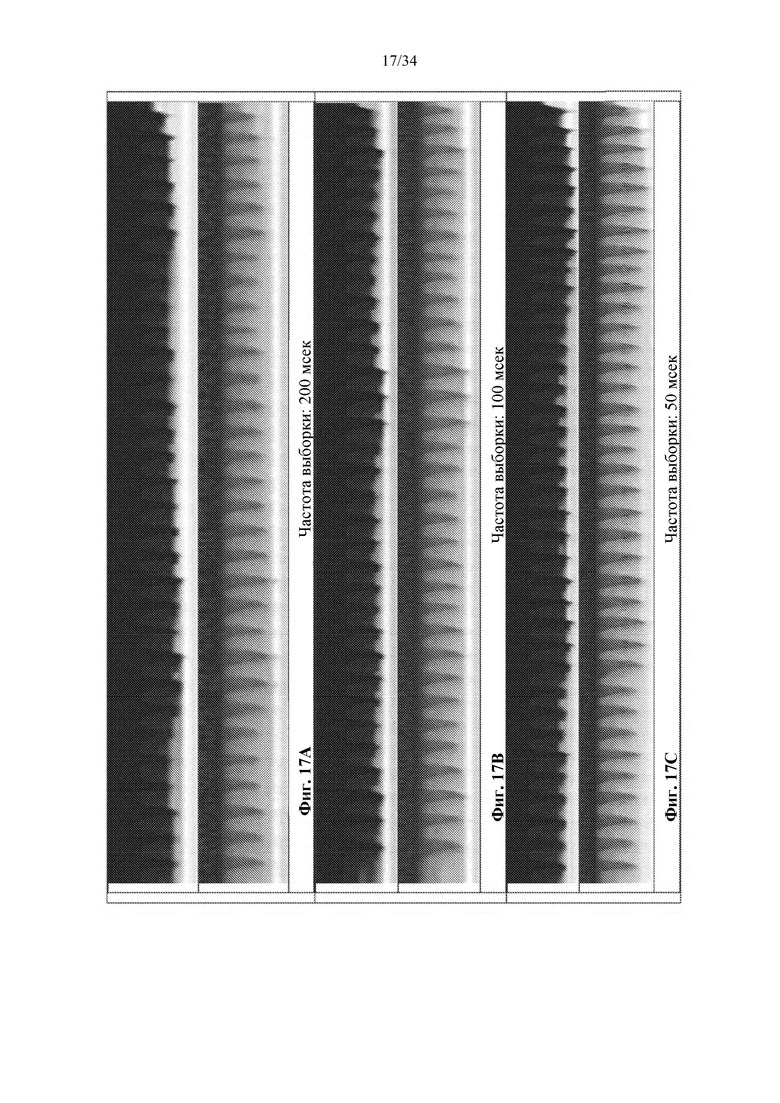
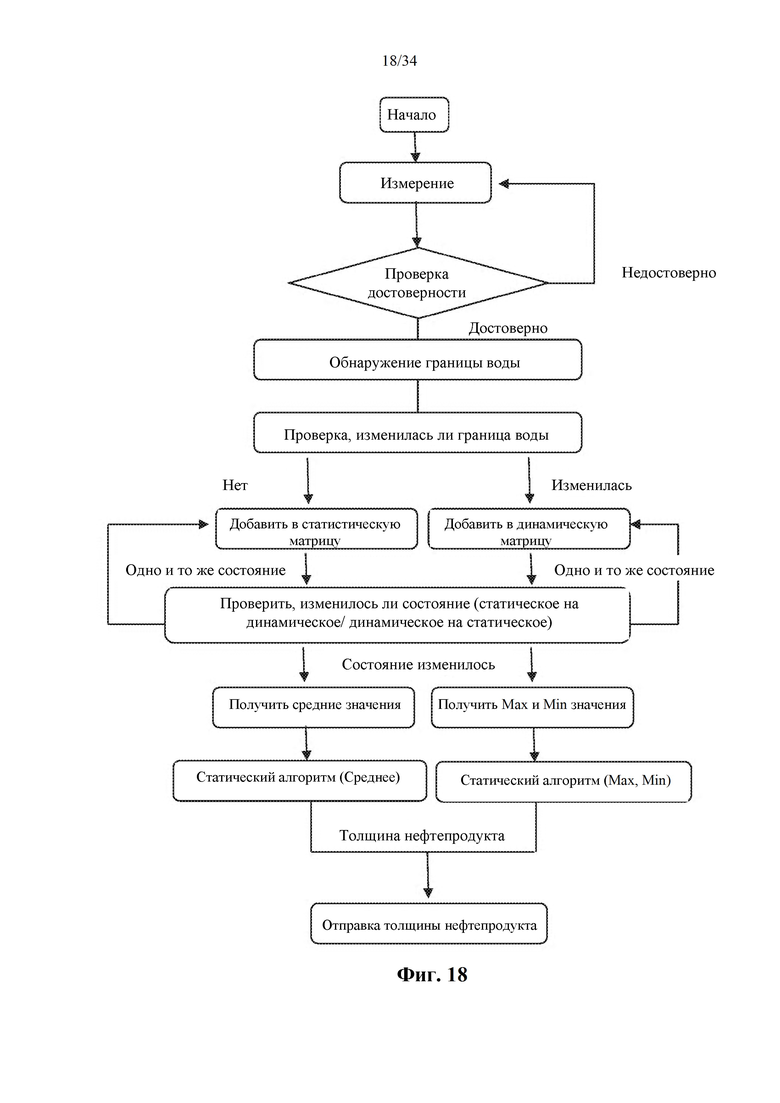
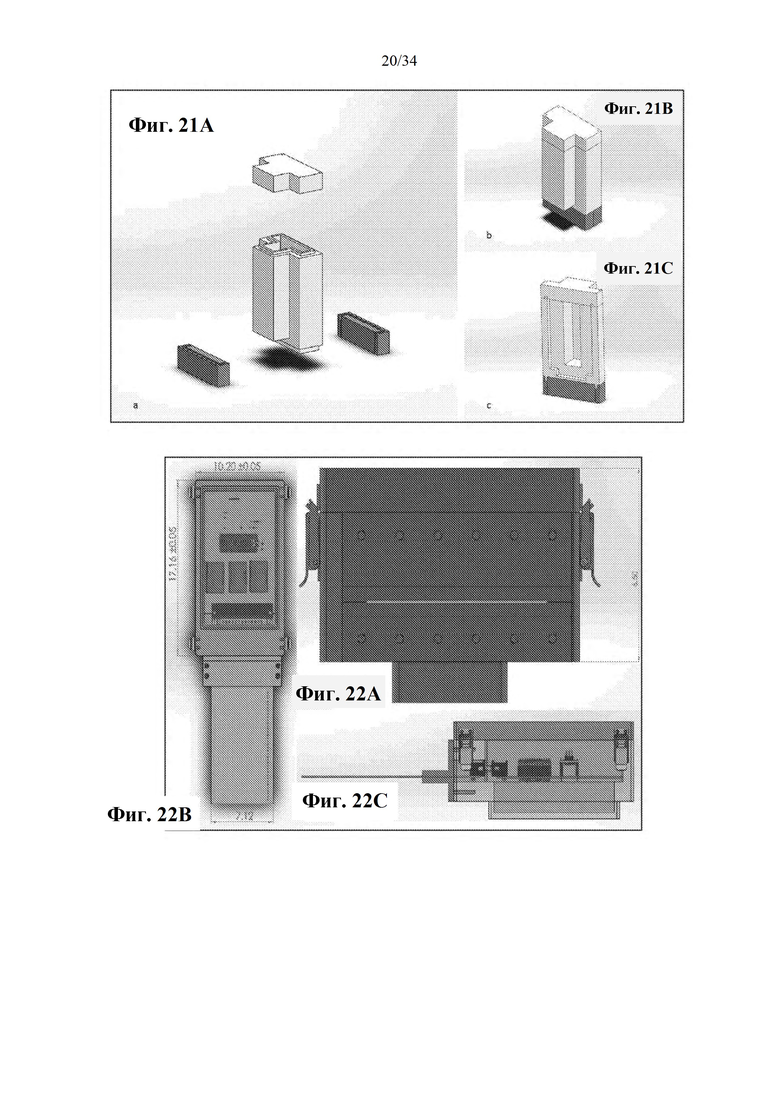
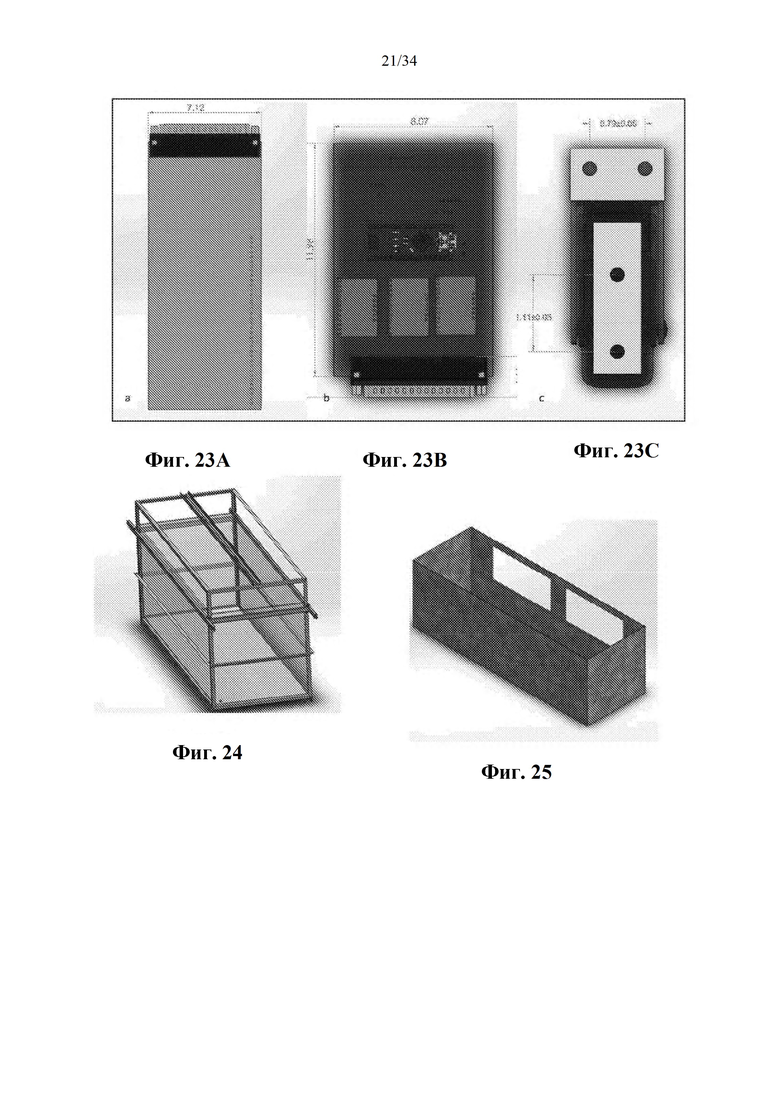
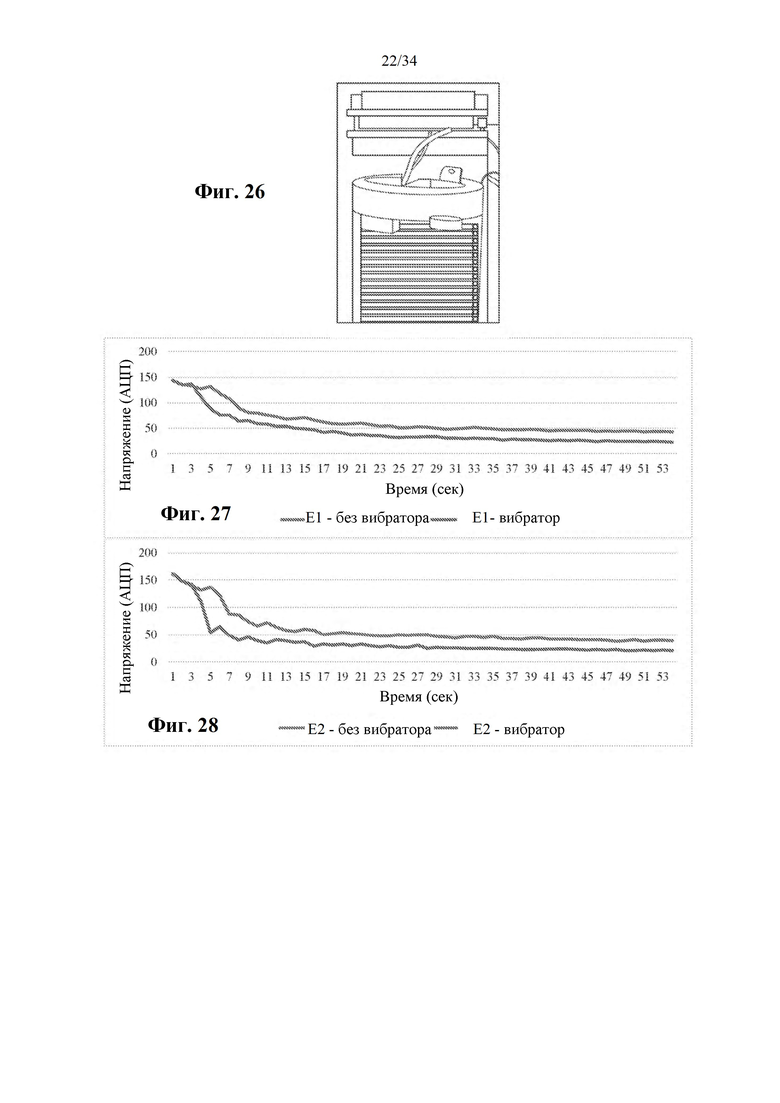
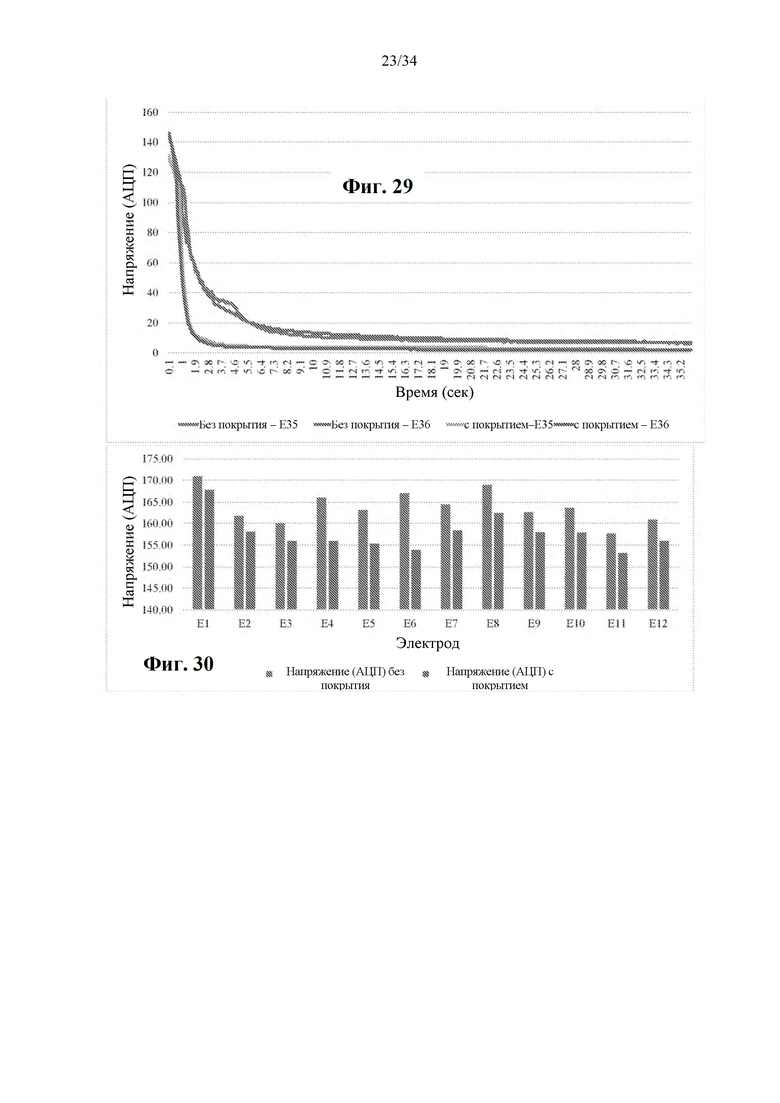
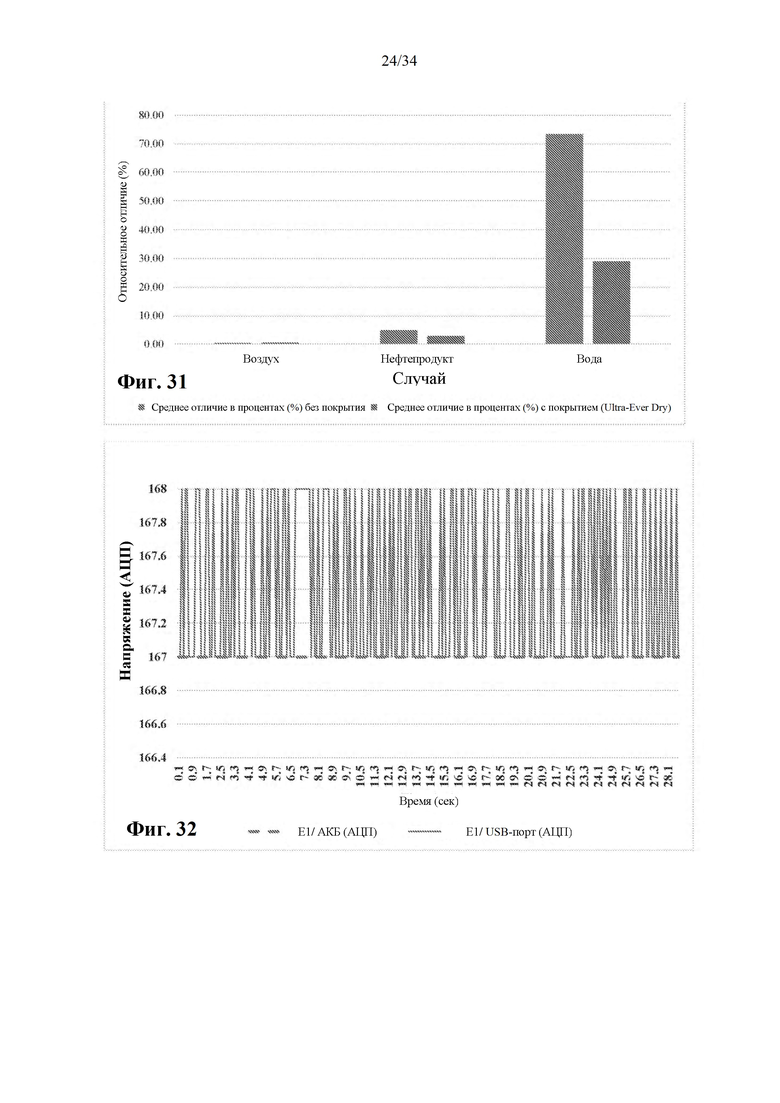
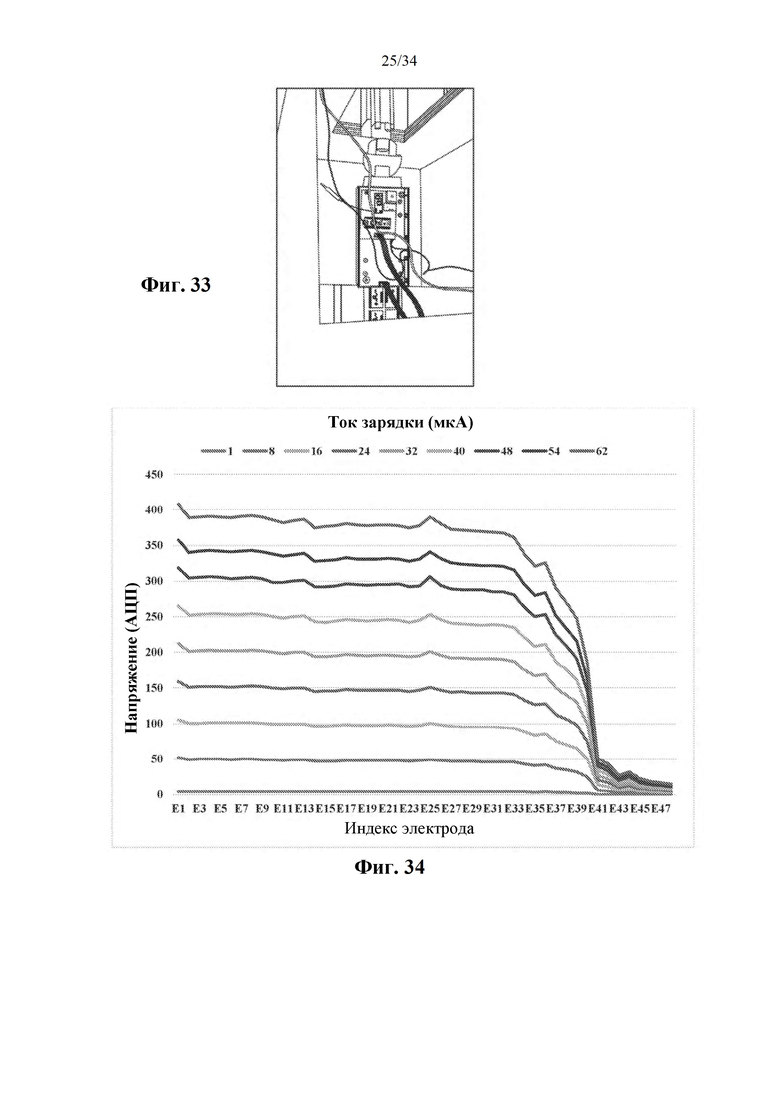
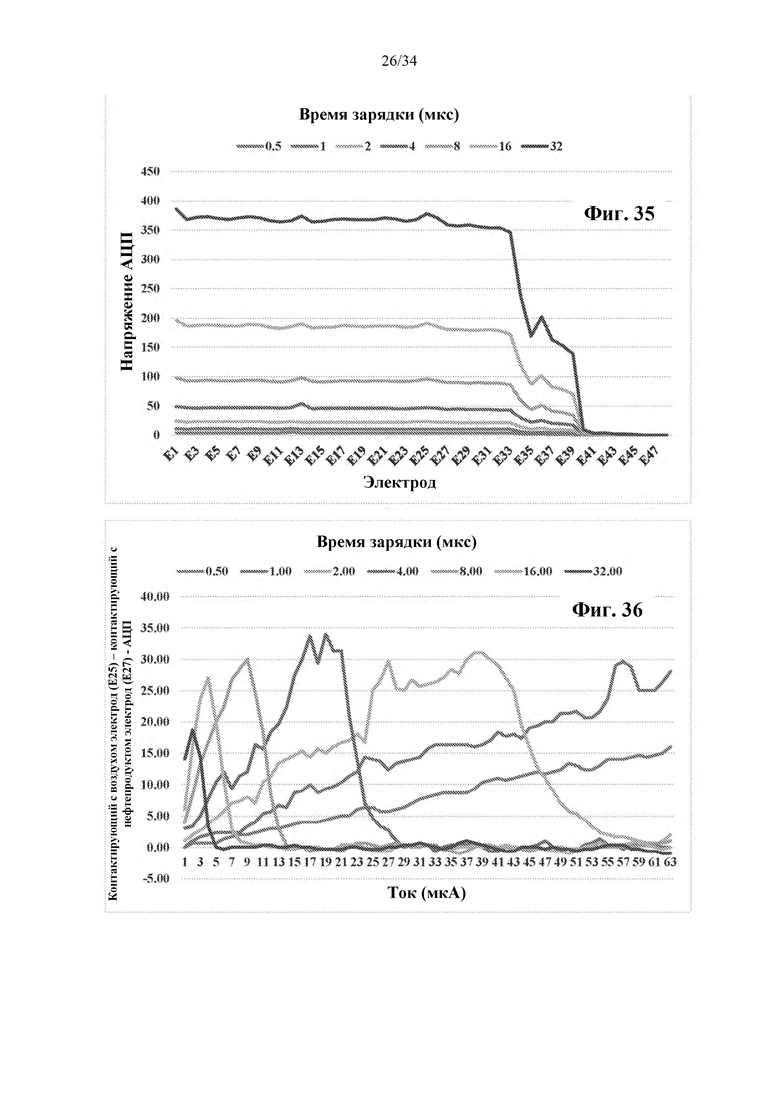
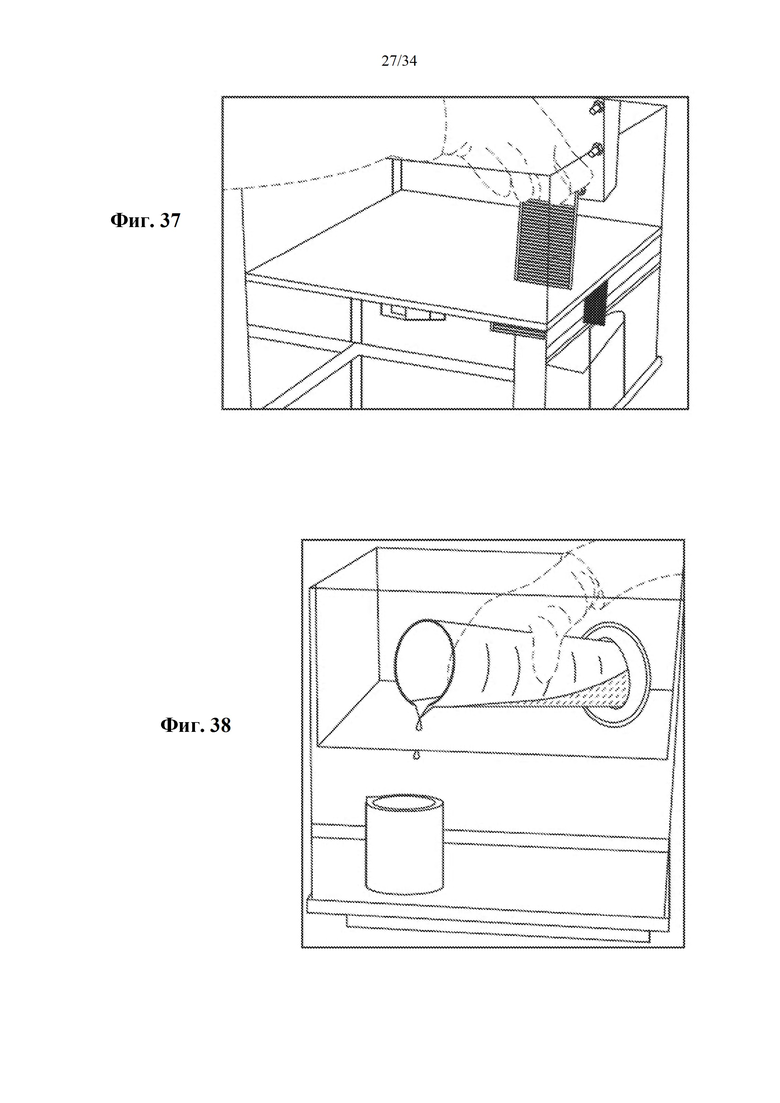
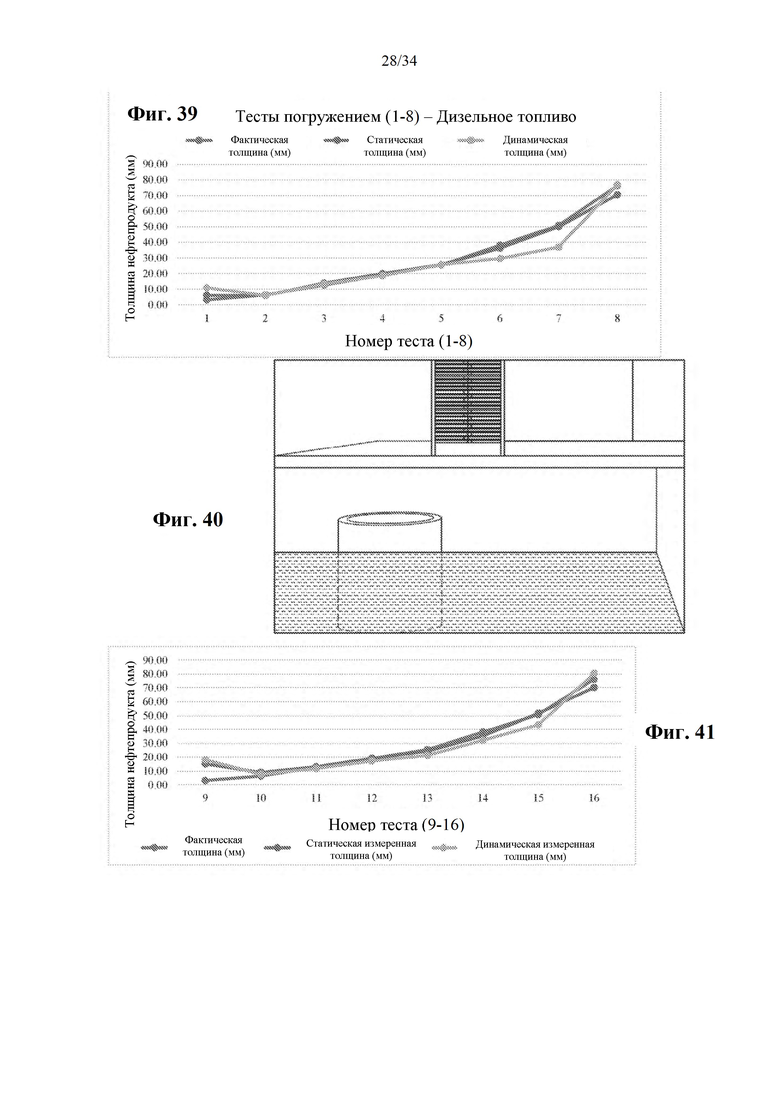
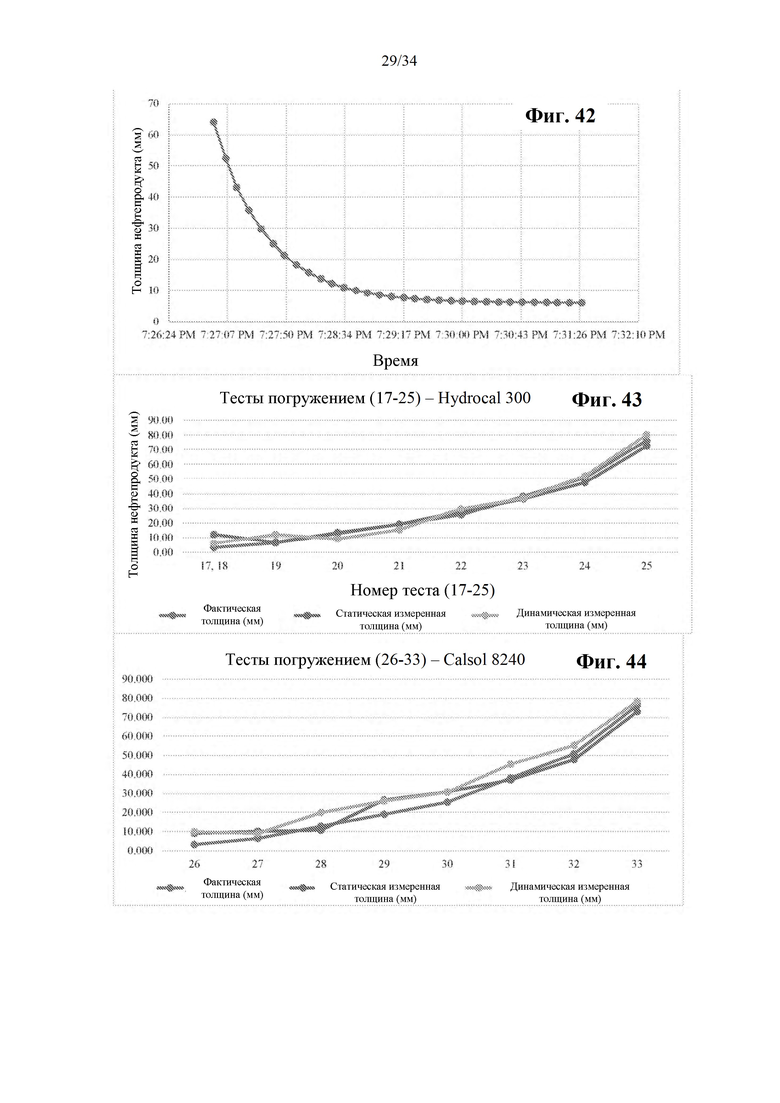
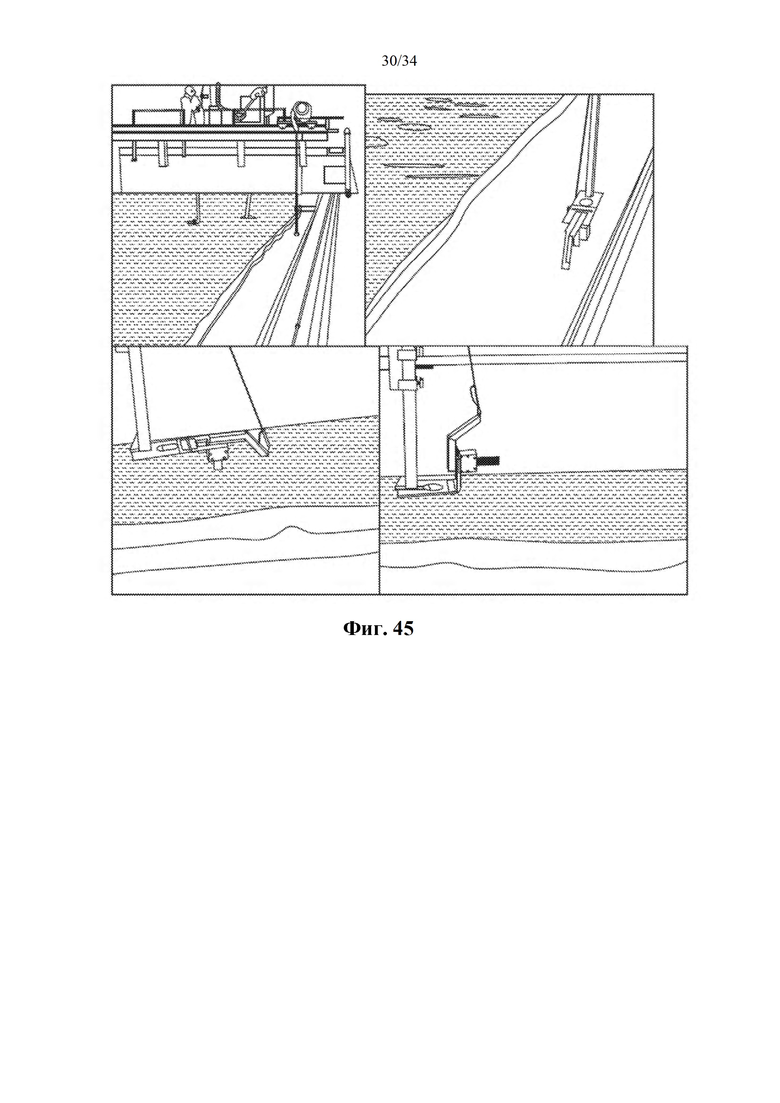
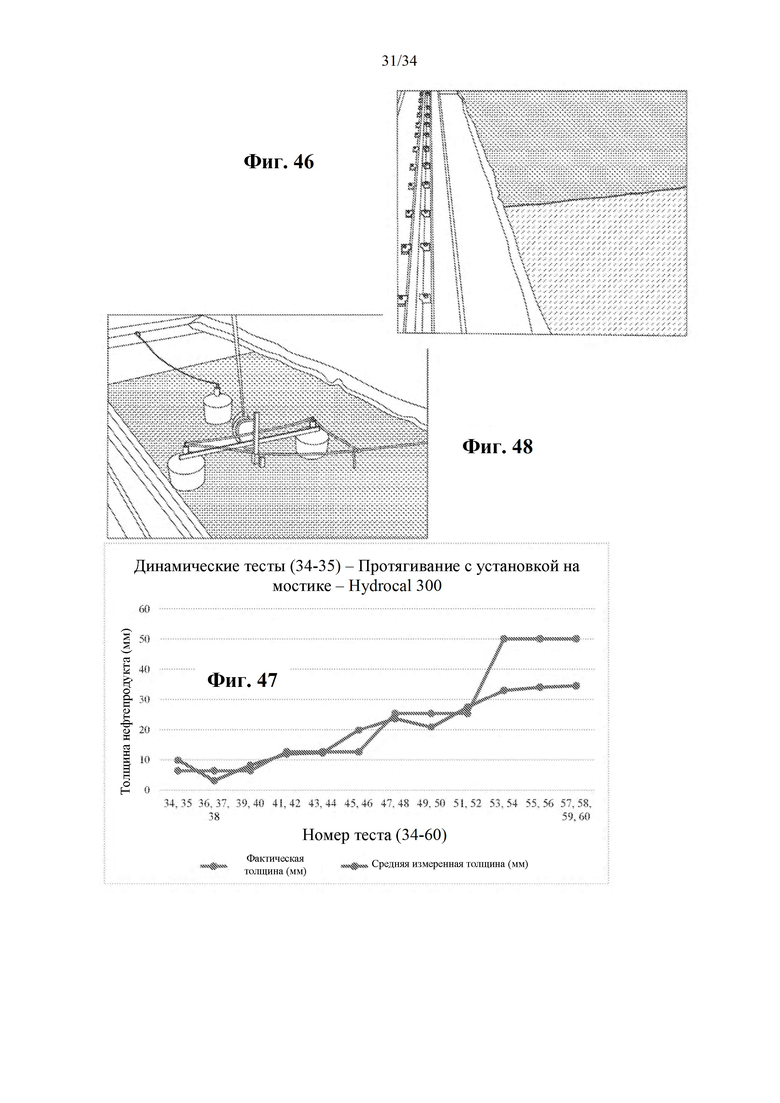
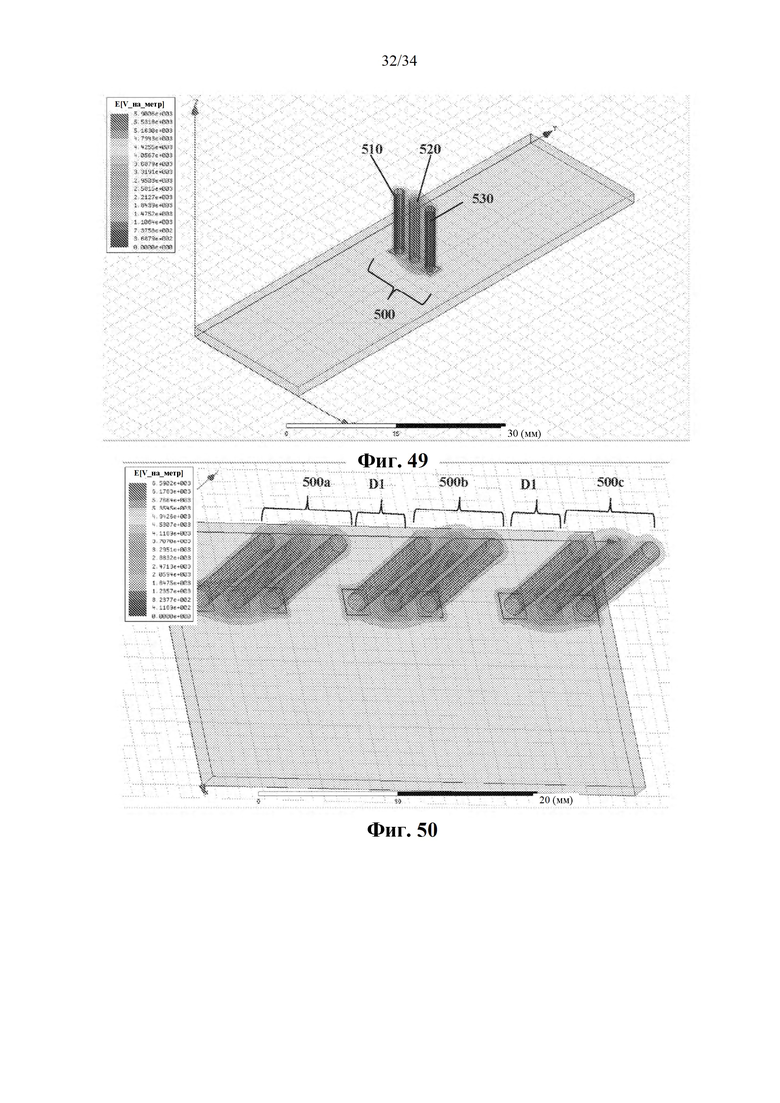
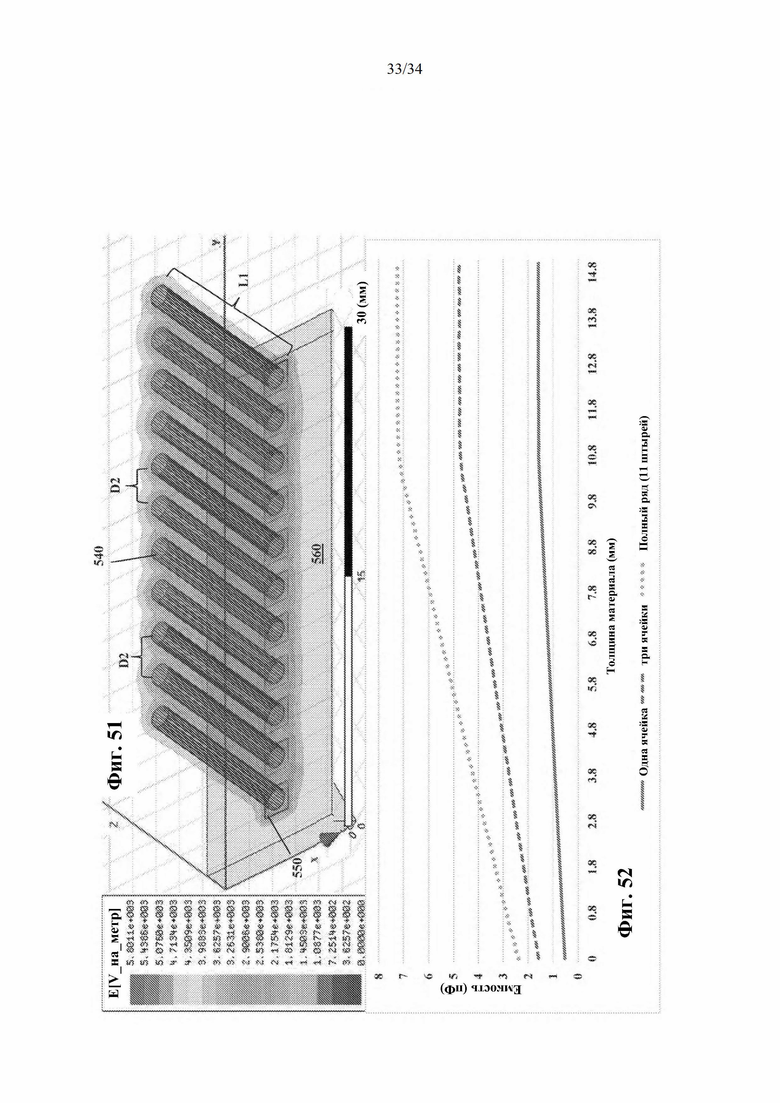
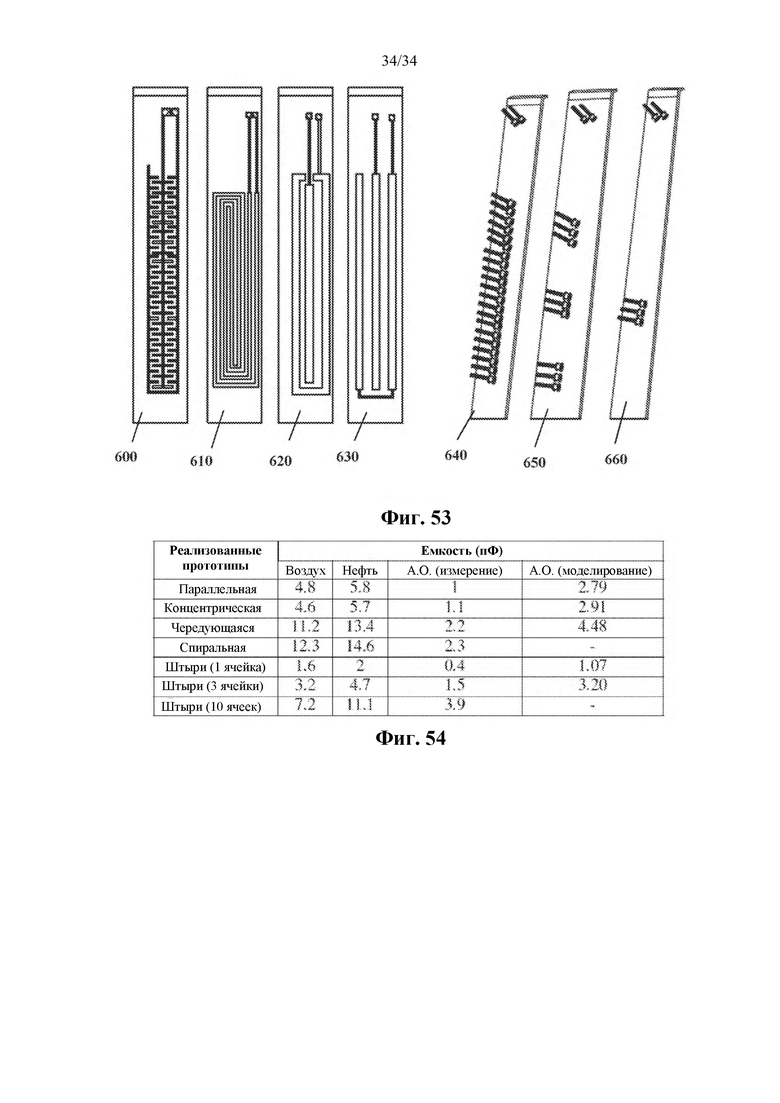
Группа изобретений относится к области измерительной техники. Зондирующий матричный сенсор собственной емкости содержит множество электродов, образующих зондирующую матрицу конденсаторов собственной емкости, включающую один электрод, действующий как электрод возбуждения и измерительный электрод, причем изменение емкости на каждом электроде независимо измеряется для обнаружения типа материала, окружающего электроды; при этом электрическое поле, образованное электродами, проходит над плоскостью измерения и позволяет обнаружить изменение диэлектрической постоянной жидкости, окружающей датчик. Технический результат – повышение точности и чувствительности зондирующего матричного сенсора. 3 н. и 17 з.п. ф-лы, 54 ил, 58 табл.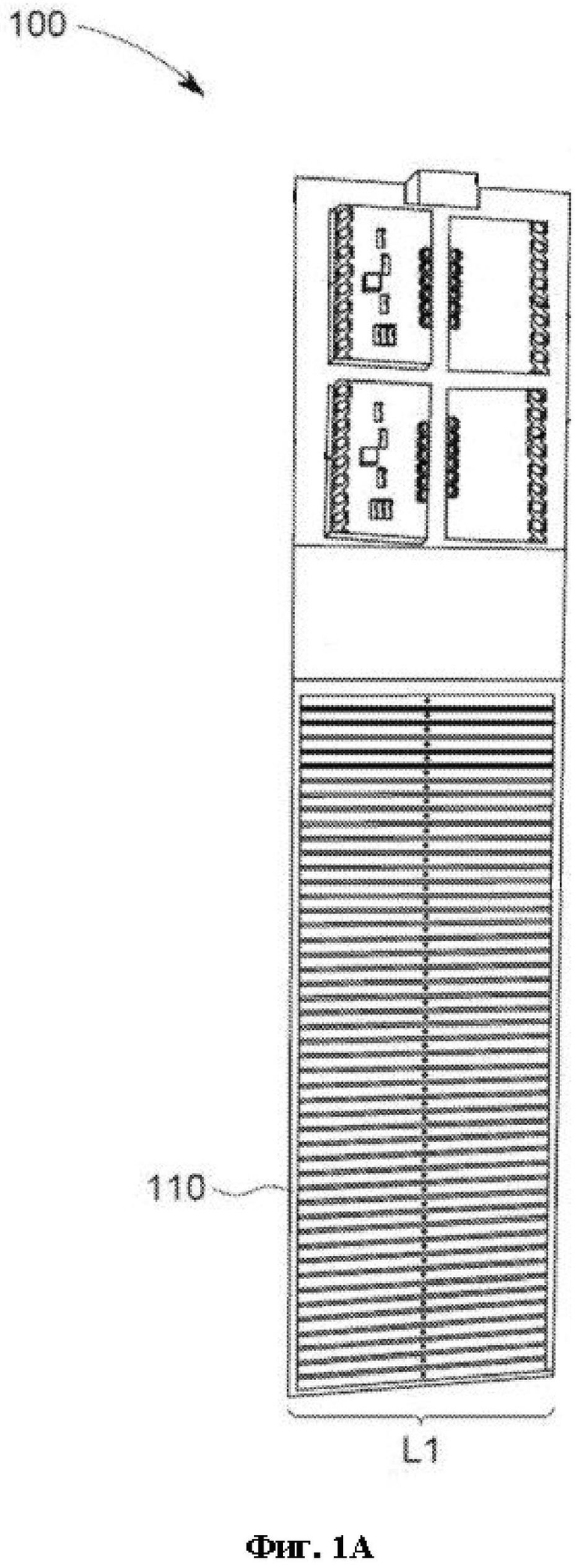
1. Зондирующий матричный сенсор собственной емкости, содержащий: множество электродов, образующих зондирующую матрицу конденсаторов собственной емкости, включающую один электрод, действующий как электрод возбуждения и измерительный электрод, причем изменение емкости на каждом электроде независимо измеряется для обнаружения типа материала, окружающего электроды; при этом электрическое поле, образованное электродами, проходит над плоскостью измерения и позволяет обнаружить изменение диэлектрической постоянной жидкости, окружающей датчик.
2. Сенсор по п. 1, отличающийся тем, что функционирование указанного сенсора основано на отличии в емкости между электродами, а не на абсолютных значениях емкости, вследствие чего не требуется его калибровка для различных типов материалов.
3. Сенсор по п. 1, при этом указанный емкостный датчик может различать границу вода/нефтепродукт и границу нефтепродукт/воздух; и толщина нефтепродукта может быть установлена независимо от участка датчика, в котором произошел контакт с нефтепродуктом.
4. Сенсор по п. 1, дополнительно содержащий множество модулей емкостных сенсорных контроллеров, функционально подключенных к множеству электродов и блоку обработки данных; при этом емкостные сенсорные контроллеры функционируют путем зарядки и разрядки каждого чувствительного электрода постоянным током в течение определенного промежутка времени; и во время возбуждения и измерения показателей каждого электрода все остальные электроды соединяются с заземлением.
5. Сенсор по п. 4, где в конце каждого цикла зарядки и разрядки измеренное напряжение преобразуется в цифровое значение посредством блока обработки данных, и цифровой фильтр применяют к цифровому значению для повышения помехоустойчивости в различных условиях окружающей среды.
6. Сенсор по п. 5, где высота каждого электрода составляет приблизительно 2 мм, и вертикальный зазор между двумя соседними электродами составляет приблизительно 1 мм.
7. Сенсор по п. 6, дополнительно содержащий микроконтроллер, функционально подключенный к блоку обработки данных, чтобы принимать цифровые значения, и микроконтроллер применяет алгоритм оценки толщины для вычисления и выдачи значения фактической толщины нефтепродукта.
8. Сенсор по п. 6, дополнительно содержащий множество горизонтальных штырей, функционально соединенных с токопроводящими полосами; при этом множество горизонтальных штырей замкнуты накоротко при нахождении в воде; и множество горизонтальных штырей, расположенных в нефтепродукте, полностью погружены в нефтепродукт, и измеренные значения емкости связаны с диэлектрической постоянной нефтепродукта.
9. Способ измерения для нахождения по меньшей мере двух индексов электродов между верхним и нижним электродами, причем указанные по меньшей мере два электрода с индексами между верхним и нижним электродами расположены на границах между водой и нефтепродуктами с разными диэлектрическими постоянными, предусматривающий: последовательное измерение значений напряжения всех электродов, расположенных на границе вода/нефтепродукт и границе воздух/нефтепродукт, путем использования множества емкостных сенсорных контроллеров и мультиплексоров; считывание цифровых значений напряжения, полученных от каждого электрода, и применение множества слоев цифровой фильтрации для повышения стабильности цифровых значений напряжения; нормализацию полученных значений напряжения и вычисление относительных процентных изменений по отношению к базовым калибровочным значениям для каждого электрода; применение вычисленных относительных процентных изменений для определения состояния каждого электрода, при этом состояние каждого электрода представляет собой его нахождение в воздухе, нефтепродукте и воде; и присвоение каждого отношения индексу его электрода и вычисление фактической толщины нефтепродукта исходя из знания геометрических размеров датчика и расстояния между электродами.
10. Способ измерения по п. 9, дополнительно предусматривающий получение калибровочных значений, когда датчик является полностью сухим и находится на открытом воздухе в течение определенного промежутка времени.
11. Способ измерения по п. 9, дополнительно предусматривающий обработку динамического движения, когда датчик поднимается или опускается, а также обнаружение направления движения датчика путем использования среднего значения всех измерений напряжения в каждом цикле измерения и установление направления движения датчика.
12. Способ измерения по п.9, дополнительно предусматривающий этап снижения эффекта загрязнения легким нефтепродуктом путем применения способа в течение заданного интервала времени.
13. Способ измерения по п.9, дополнительно предусматривающий этап снижения эффекта загрязнения тяжелым нефтепродуктом, путем обнаружения самой низкой точки движения датчика и применения способа коррекции для удаления определенного количества загрязненных электродов из обнаруженных контактирующих с нефтепродуктом электродов; а также путем применения временной интерполяции посредством обнаружения количества загрязненных электродов и вычитания указанного количества загрязненных электродов из занимаемого нефтепродуктом интервала перед вычислением фактической толщины.
14. Способ измерения по п. 9, дополнительно предусматривающий обнаружение замкнутых накоротко электродов из-за контакта с водой по низким значениям напряжения и высоким относительным отличиям от базовых калибровочных значений; классификацию замкнутых накоротко электродов в качестве расположенных в воде электродов и их удаление из чувствительной матрицы; идентификацию остальных электродов, окруженных воздухом и нефтепродуктом и обнаружение граничного электрода между двумя средами на основе относительных отличий между ними, в этом случае, поскольку нефтепродукты являются непроводящими жидкостями, электроды не замкнуты накоротко, и измеряется фактическая емкость каждого электрода, поскольку алгоритм основан на относительных различиях между электродами для нахождения границ, фактическая точность значений емкости не является обязательным требованием.
15. Устройство измерения толщины плавающей жидкости на основе зондирующего матричного сенсора собственной емкости, содержащее: датчик, выполненный с возможностью измерения толщины текучей среды, плавающей между по меньшей мере двумя средами; при этом датчик является зондирующей матрицей собственной емкости с по меньшей мере двумя токопроводящими пластинами, расположенными рядом друг с другом, причем между ними имеется пустое пространство; по меньшей мере два диэлектрических материала, которые имеют разные диэлектрические постоянные, обращены к токопроводящим пластинам; причем путем измерения изменения емкости на каждой из токопроводящих пластин независимо, идентифицируется граница воздух - нефтепродукт и граница вода - нефтепродукт; и толщина плавающей текучей среды вычисляется на основе идентифицированной границы воздух - нефтепродукт и границы вода - нефтепродукт, а также размеров датчика.
16. Устройство измерения по п. 15, причем указанное устройство измерения толщины плавающей жидкости используется во время операции по сбору нефти в открытом океане или в качестве переносного устройства.
17. Устройство измерения по п. 15, выполненное с возможностью использования способа измерения для применения датчика в динамических средах, в присутствии волн, во время движения/протягивания, с различными типами нефтепродуктов, в соленой/пресной воде, в различных условиях окружающей среды, к которым по существу относятся освещение, температура, влажность.
18. Устройство измерения по п. 15, причем указанное устройство измерения толщины нефтепродукта предоставляет оценку толщины нефтепродукта посредством использования матрицы емкостных полос и полагается на относительные показания материала, а не на абсолютные показания, в результате чего показания датчика становятся нечувствительными к типам нефтепродуктов, условиям окружающей среды и/или производственным дефектам.
19. Устройство измерения по п. 15, где конструкция датчика включает в себя тонкую ножевидную конструкцию, чтобы минимизировать влияния загрязнения на измерения и улучшить гидродинамические характеристики.
20. Устройство измерения по п. 15, где конструкция датчика содержит матрицу штырей, которые проникают через слой загрязнений нефтепродукта и действуют как конденсатор с параллельными пластинами, включающий в себя первый набор чувствительных штырей, которые прикреплены к каждому ряду, при этом первый набор штырей используется для возбуждения и измерения и является первой токопроводящей пластиной конденсатора; второй набор заземленных штырей, установленных следом за чувствительными штырями, присоединен к заземлению и действует в качестве второй пластины конденсатора с параллельными пластинами, причем непроводящий материал, заполняющий зазор между чувствительными штырями и заземленными штыря, действует в качестве диэлектрика.
| US 6101873 A1, 15.08.2000 | |||
| US 2005127908 A1, 16.06.2005 | |||
| US 2017191237 A1, 06.07.2017 | |||
| US 5613399 A1, 25.03.1997 | |||
| Антенный коммутатор | 1956 |
|
SU105437A1 |

