Предшествующий уровень техники настоящего изобретения
[1] Настоящее описание изобретения относится к томографии на отраженных сейсмических волнах.
[2] Томографию на отраженных сейсмических волнах могут применять с целью определения скоростной модели для геологической области. Скоростная модель геологической области описывает соответствующие скорости сейсмических волн, проходящих через различные местоположения в пространстве геологической области. Например, скоростную модель могут отображать в виде трехмерной (3D) матрицы числовых значений, где каждая компонента матрицы отвечает соответствующему местоположению в пространстве геологической области. В этом примере значение каждой компоненты матрицы отображает скорость сейсмических волн, проходящих через местоположение в пространстве геологической области, которое соответствует этой компоненте матрицы.
[3] Как правило, сейсмические волны могут с разными скоростями проходить через различные местоположения в пространстве геологической области, например, из-за различий в плотности горных пород и осадков в различных местоположениях пространства геологической области.
Краткое раскрытие настоящего изобретения
[4] В настоящем описании изобретения представлена система, реализованная в виде компьютерных программ на одном или нескольких компьютерах, которые находятся в одном или нескольких местоположениях, при этом система генерирует скоростную модель геологической области с применением кинематических характеристик, полученных из сейсмических данных до суммирования и после суммирования.
[5] Согласно первому аспекту предусмотрен способ, реализованный при помощи одного или нескольких устройств для обработки данных, для определения скоростной модели геологической области. Способ предусматривает получение текущей скоростной модели геологической области, при этом для каждого из множества местоположений в пространстве геологической области модель описывает соответствующую скорость сейсмических волн, проходящих через это местоположение в пространстве. Получают сейсмические данные до суммирования, которые включают в себя множество сейсмических трасс, описывающих геологическую область, и сейсмические данные после суммирования, сгенерированные из сейсмических данных до суммирования с применением метода для сейсмического суммирования.
[6] На каждой из множества итераций по сейсмическим данным после суммирования определяют множество отраженных волн и текущую скоростную модель. Каждая отраженная волна соответствует: 1) местоположению сейсмического источника, который распространяет сейсмическую волну; 2) локальной отражающей поверхности в геологической области; и 3) местоположению сейсмического приемника, который получает отражение сейсмической волны от локальной отражающей поверхности. Для каждой из множества отраженных волн определяют соответствующее время наблюдения пробега волны, в том числе, для каждой отраженной волны: определяют соответствующую сейсмическую трассу, включенную в сейсмические данные до суммирования на основе отраженной волны, и определяют соответствующее время наблюдения пробега отраженной волны на основе, по меньшей мере частично, кинематических характеристик, которые получены из соответствующей сейсмической трассы, включенной в сейсмические данные до суммирования. Текущую скоростную модель обновляют на основе, по меньшей мере частично, значений времени наблюдения пробега множества отраженных волн.
[7] Согласно некоторым вариантам осуществления способ дополнительно предусматривает генерирование улучшенных сейсмических данных до суммирования путем применения к сейсмическим данным до суммирования метода для нелинейного формирования луча с целью улучшения данных, которое предусматривает получение кинематических характеристик сейсмических трасс, входящих в состав сейсмических данных до суммирования. Сейсмические данные после суммирования генерируют путем обработки улучшенных сейсмических данных до суммирования с применением метода для сейсмического суммирования.
[8] Согласно некоторым вариантам осуществления получение кинематических характеристик сейсмических трасс, входящих в состав сейсмических данных до суммирования, предусматривает генерирование первых частных производных, вторых частных производных и характеристик подобия в опорных точках сейсмических данных до суммирования.
[9] Согласно некоторым вариантам осуществления опорные точки в сейсмических данных до суммирования расположены на крупной сетке.
[10] Согласно некоторым вариантам осуществления определение отраженной волны включает в себя определение точки в сейсмических данных после суммирования, которая отвечает соответствующей локальной отражающей поверхности, на основе кинематической характеристики, полученной в этой точке по сейсмическим данным после суммирования. Пространственное местоположение соответствующей локальной отражающей поверхности определяют путем прослеживания лучей при помощи текущей скоростной модели, это предусматривает прослеживание луча от поверхности наблюдения в текущую скоростную модель до истечения половины времени прохождения в прямом и обратном направлении вдоль нормального луча до соответствующей локальной отражающей поверхности. Местоположение соответствующего сейсмического источника и местоположение соответствующего сейсмического приемника определяют, исходя из пространственного местоположения соответствующей локальной отражающей поверхности.
[11] Согласно некоторым вариантам осуществления определение местоположения соответствующего сейсмического источника предусматривает прослеживание первого луча от пространственного местоположения соответствующей локальной отражающей поверхности до поверхности наблюдения при помощи текущей скоростной модели. Местоположение соответствующего сейсмического источника определяют, исходя из местоположения, в котором первый луч проходит через поверхность наблюдения. Определение местоположения соответствующего сейсмического приемника включает в себя прослеживание второго луча от пространственного местоположения соответствующей локальной отражающей поверхности до поверхности наблюдения при помощи текущей скоростной модели и определение местоположения соответствующего сейсмического приемника, исходя из местоположения, в котором второй луч проходит через поверхность наблюдения.
[12] Согласно некоторым вариантам осуществления определение соответствующего времени наблюдения пробега волны для отраженной волны на основе, по меньшей мере частично, кинематических характеристик, полученных из соответствующей сейсмической трассы, входящей в состав сейсмических данных до суммирования, предусматривает определение приращения времени пробега отраженной волны по модели приращения скоростей. Первый поправочный член определяют, исходя из кинематических характеристик, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования, в том числе: исходя из приращения времени пробега отраженной волны, определяют первое время, на котором кинематическую характеристику подобия, полученную из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования, локально максимально увеличивают, и определяют первый поправочный член, исходя из первого времени. Соответствующее время наблюдения пробега отраженной волны определяют, исходя из приращения времени пробега отраженной волны и первого поправочного члена.
[13] Согласно некоторым вариантам осуществления кинематические характеристики рассчитывают только для подходящего подмножества сейсмических трасс из сейсмических данных до суммирования. Определение соответствующей сейсмической трассы, входящей в состав сейсмических данных до суммирования на основе отраженной волны, включает в себя определение того, что соответствующая сейсмическая трасса представляет собой ближайшую сейсмическую трассу к данной сейсмической трассе, соответствующей сейсмическому источнику и сейсмическому приемнику отраженной волны, из подходящего подмножества сейсмических трасс сейсмических данных до суммирования, для которых рассчитаны кинематические характеристики.
[14] Согласно некоторым вариантам осуществления способ дополнительно предусматривает определение второго поправочного члена, исходя из кинематических характеристик, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования. Второй поправочный коэффициент определяют исходя из: 1) кинематических характеристик первой и второй частных производных, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования; и 2) расстояния между соответствующей сейсмической трассой и данной сейсмической трассой, соответствующей сейсмическому источнику и сейсмическому приемнику отраженной волны. Помимо приращения времени пробега отраженной волны и первого поправочного члена определяют соответствующее время наблюдения пробега, исходя из второго поправочного члена.
[15] Согласно некоторым вариантам осуществления определение отраженных волн по сейсмическим данным после суммирования и текущей скоростной модели предусматривает определение соответствующего рассчитанного времени пробега для каждой отраженной волны. Обновление текущей скоростной модели предусматривает: определение разности между рассчитанным временем пробега отраженной волны и временем наблюдения пробега отраженной волны для каждой отраженной волны, и применение метода томографической инверсии с целью определения уточнения текущей скоростной модели, исходя из разностей между рассчитанными временами пробега и значениями времени наблюдения пробега.
[16] Согласно некоторым вариантам осуществления после итерации окончательного обновления способ дополнительно предусматривает получение текущей скоростной модели для применения с целью описания характеристик геологической области.
[17] Согласно второму аспекту предусмотрена система, включающая в себя один или несколько компьютеров; и одно или несколько запоминающих устройств, соединенных с одним или несколькими компьютерами с возможностью обмена данными. На одном или нескольких запоминающих устройствах хранят команды, выполнение которых одним или несколькими компьютерами приводит к тому, что один или несколько компьютеров выполняют операции согласно первому аспекту.
[18] Согласно третьему аспекту предусмотрен один или несколько энергонезависимых носителей информации для хранения команд, выполнение которых одним или несколькими компьютерами приводит к тому, что один или несколько компьютеров выполняют операции согласно первому аспекту.
[19] Конкретные осуществления предмета изобретения, описанные в настоящем документе, могут быть реализованы таким образом, чтобы получить одно или несколько из перечисленных ниже преимуществ.
[20] Система моделирования скоростей, описанная в настоящем документе, может определять расчетную скоростную модель для геологической области, используя кинематические характеристики, полученные из сейсмических данных как до суммирования, так и после суммирования, характеризующих геологическую область. В частности, в системе моделирования скоростей используют кинематические характеристики, полученные из сейсмических данных после суммирования, с целью определения надежных оценок локальных отражающих поверхностей, а также используют кинематические характеристики, полученные из сейсмических данных до суммирования, с целью определения времен «наблюдения» пробега отраженных сейсмических волн с высоким разрешением и большой точностью. В отличие от этого, традиционные системы, которые рассчитаны преимущественно (или полностью) на кинематические характеристики, полученные из сейсмических данных до суммирования, могут быть ненадежными, то есть, могут генерировать скоростные модели, которые чувствительны к помехам, которые содержатся в сейсмических данных до суммирования. Кроме того, традиционные системы, которые рассчитаны преимущественно (или полностью) на кинематические характеристики, полученные из сейсмических данных после суммирования, могут генерировать только «сглаженные» скоростные модели, то есть, скоростные модели, которые неточно отображают детали реальной модели сейсмических скоростей. За счет использования кинематических характеристик, полученных из сейсмических данных как до суммирования, так и после суммирования, система моделирования скоростей, описанная в настоящем документе, может генерировать более точные скоростные модели, чем некоторые традиционные системы.
[21] Скоростные модели, сгенерированные системой моделирования скоростей, которая описана в настоящем документе, могут использовать напрямую для построения глубинных изображений или они могут выступать в качестве начальных оценок для последующих систем моделирования скоростей (например, систем анализа скоростей миграции (MVA) или полноволновой инверсии (FWI)). Точные оценки начальной скоростной модели, сгенерированной системой моделирования скоростей, которая описана в настоящем документе, могут снизить потребление вычислительных ресурсов последующими системами моделирования скоростей, например, за счет сокращения количества итераций, выполняемых системами MVA, или они помогут избежать проблемы срыва цикла в системах FWI.
[22] На прилагаемых фигурах и в описании представлена подробная информация по одному или нескольким вариантам осуществления предмета изобретения, описанным в настоящем документе. Другие признаки, аспекты и преимущества предмета изобретения станут очевидными из описания, фигур и формулы изобретения.
Краткое описание фигур
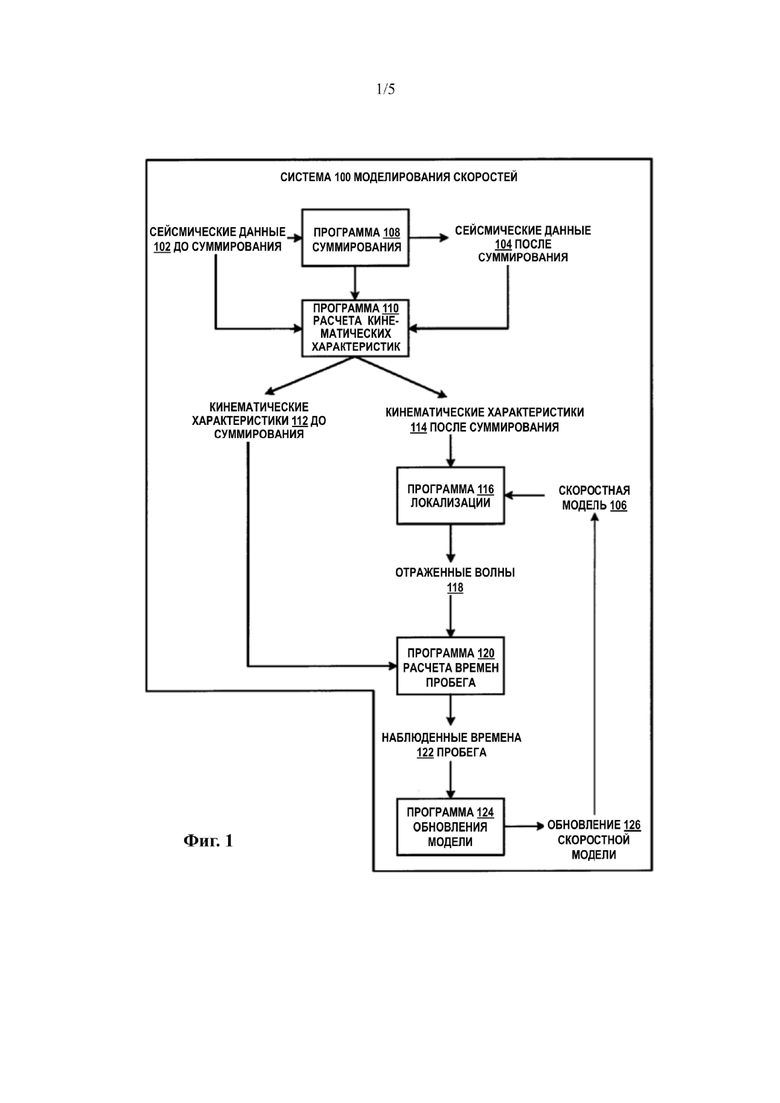
[23] На фиг. 1 представлена блок-схема примера системы для моделирования скоростей.
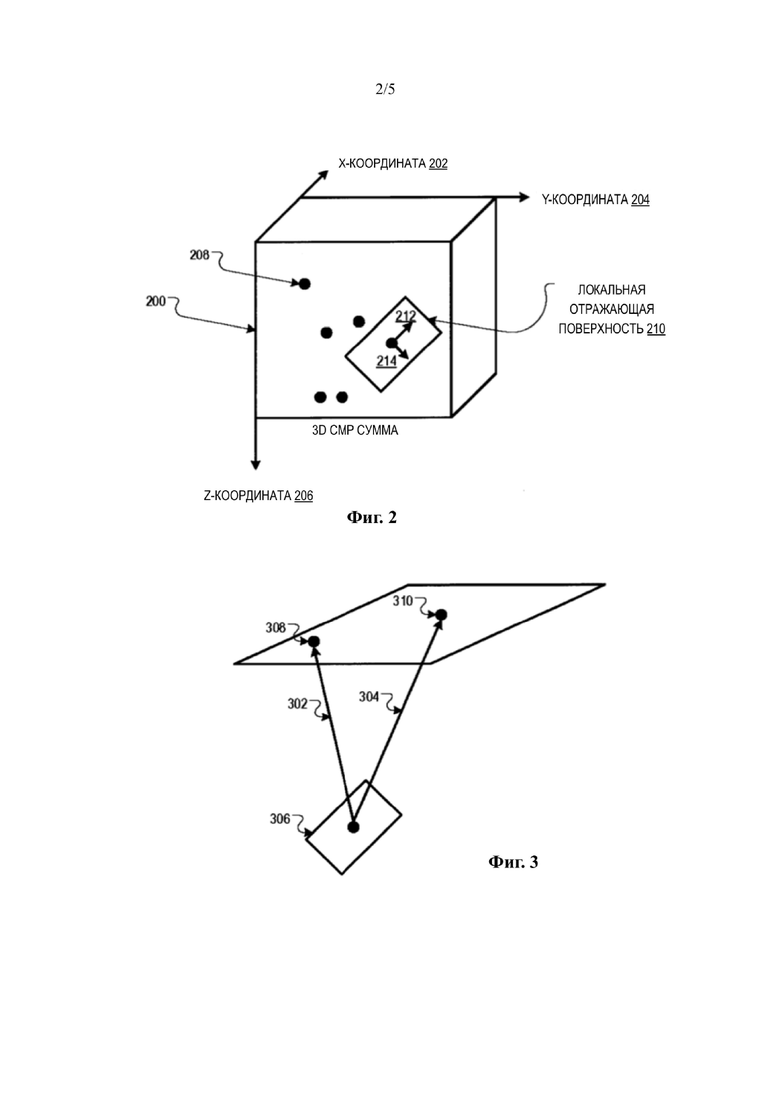
[24] На фиг. 2 показан 3D объем, который изображает сейсмические данные после суммирования в области общей средней точки (СМР) и точки в сейсмических данных после суммирования, которые определены как точки, относящиеся к локальным отражающим поверхностям.
[25] На фиг. 3 показаны отраженные лучи, которые прослежены от локальной отражающей поверхности до поверхности наблюдения с помощью текущей скоростной модели.
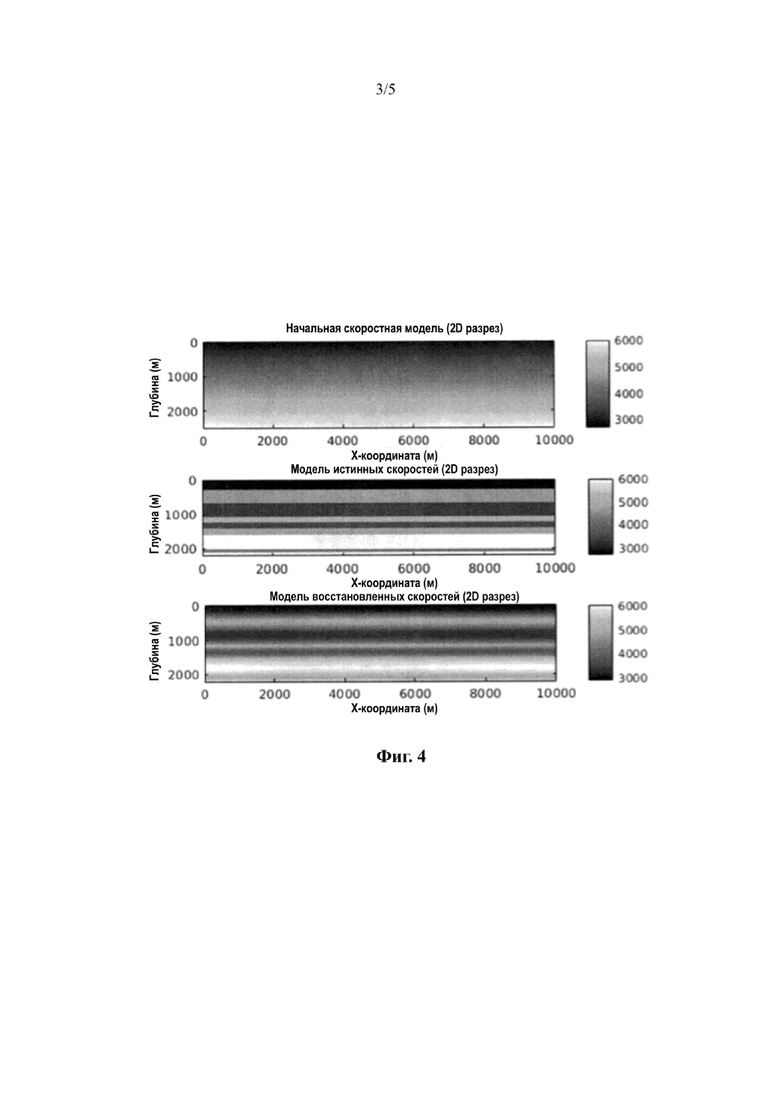
[26] На фиг. 4 представлены результаты применения системы моделирования скоростей к синтетическим сейсмическим данным до суммирования и после суммирования.
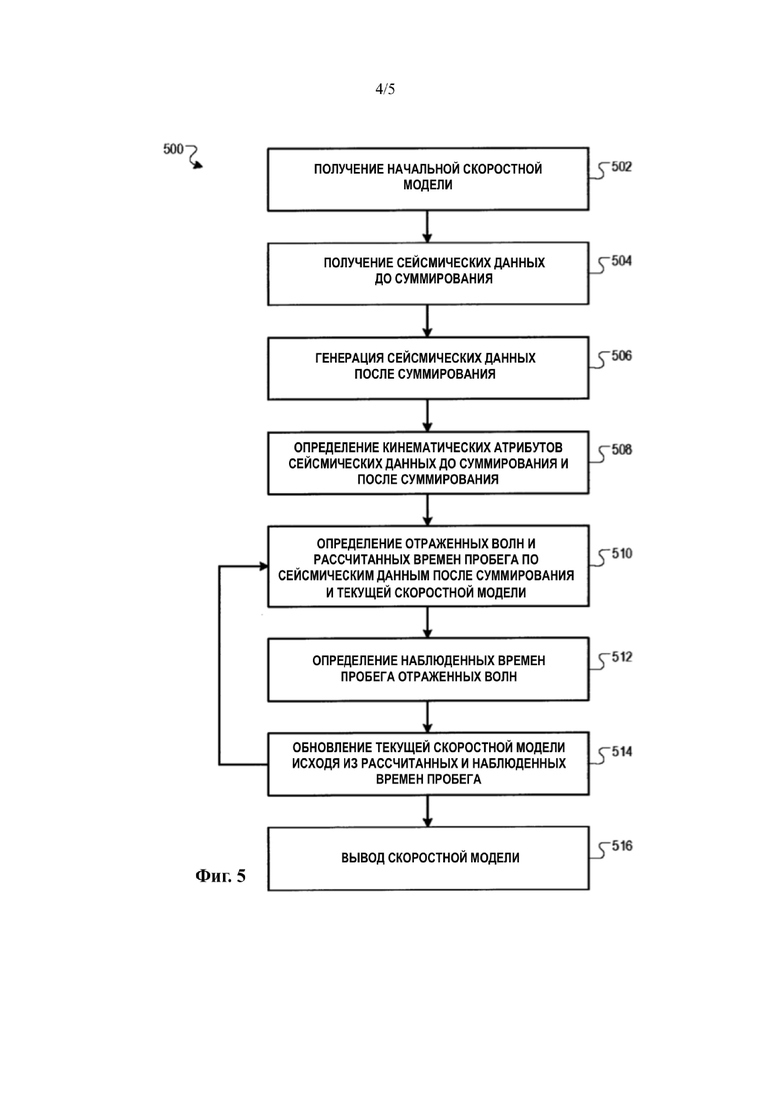
[27] На фиг. 5 представлена блок-схема примера процедуры для определения скоростной модели на основе кинематических характеристик, полученных по сейсмическим данным как до суммирования, так и после суммирования.
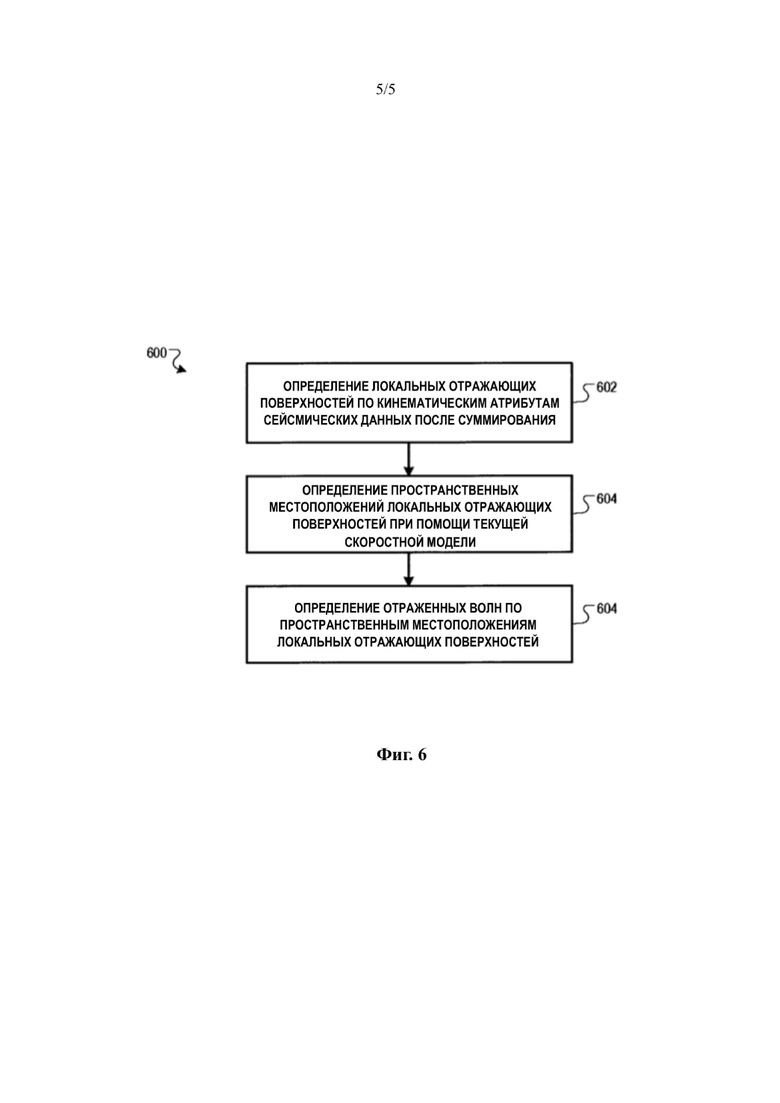
[28] На фиг. 6 представлена блок-схема примера процедуры определения отраженных волн и рассчитанных времен пробега с применением текущей скоростной модели и кинематических характеристик сейсмических данных после суммирования.
[29] Одинаковые номера позиций и обозначения на различных фигурах указывают на одинаковые элементы.
Подробное раскрытие настоящего изобретения
[30] На фиг. 1 представлен пример системы 100 моделирования скоростей. Система 100 моделирования скоростей представляет собой пример системы, реализованной в виде компьютерных программ на одном или нескольких компьютерах, находящихся в одном или нескольких местоположениях, в которых реализованы системы, компоненты и технические решения, описанные в настоящем документе.
[31] Система 100 моделирования скоростей рассчитана на обработку сейсмических данных 102 до суммирования и сейсмических данных 104 после суммирования, которые характеризуют геологическую область, с целью генерирования скоростной модели 106 геологической области. Скоростная модель 106 геологической области описывает соответствующие скорости сейсмических волн, проходящих через различные местоположения в пространстве геологической области. Например, скоростную модель 106 могут отображать в виде трехмерной матрицы числовых значений, где каждая компонента матрицы отвечает соответствующему местоположению в пространстве геологической области. В этом примере значение каждой компоненты матрицы отображает скорость сейсмических волн, проходящих через местоположение в пространстве геологической области, которое соответствует этой компоненте матрицы. Как правило, сейсмические волны могут с разными скоростями проходить через различные местоположения в пространстве геологической области, например, из-за различий в плотности горных пород и осадков в различных местоположениях пространства геологической области.
[32] Скоростная модель 106, сгенерированная системой 100, способна моделировать любую подходящую геологическую область. Например, скоростная модель 106 способна моделировать геологическую область, соответствующую квадратной или прямоугольной области на поверхности земли, которая простирается на определенное расстояние (например, несколько миль) вниз, в недра Земли.
[33] Скоростную модель 106, сгенерированную системой 100, могут использовать для множества различных целей. Например, скоростную модель 106 могут использовать напрямую для построения глубинного изображения с целью моделирования строения геологической области с тем, чтобы облегчить, например, поиски, разведку и добычу нефти и газа. В некоторых случаях скоростную модель 106, сгенерированную при помощи системы 100, могут применять в качестве входного данного для другой системы моделирования, которая дополнительно уточняет скоростную модель 106. Например, скоростную модель 106, сгенерированную при помощи системы 100, могут использовать для задания начальных значений в системе моделирования скоростей FWI или в системе моделирования скоростей MVA.
[34] Система 100 рассчитана на генерирование скоростной модели 106 путем итеративного обновления начальной скоростной модели за несколько итераций обновления. Начальная скоростная модель может представлять собой предварительно заданную (то есть, фиксированную) скоростную модель, например, скоростную модель, которая связывает каждое местоположение в пространстве геологической области с той же предварительно заданной скоростью. На каждой итерации обновления система 100 определяет «рассчитанное» время и время «наблюдения» пробега для множества отраженных волн (то есть, отражений сейсмических волн от локальных отражающих поверхностей в геологической области). Рассчитанное для отраженной волны время пробега относится ко времени пробега сейсмической волны, соответствующей отраженной волне, которая определена с применением текущей скоростной модели 106. Время наблюдения пробега для отраженной волны относится к фактическому времени пробега сейсмической волны, соответствующей отраженной волне. Разности между рассчитанными значениями и значениями времени наблюдения пробега отраженных волн указывают на точность текущей скоростной модели 106 (то есть, меньшие разности между рассчитанным значением и значением времени наблюдения пробега указывают на более высокую точность). На каждой итерации обновления система 100 обеспечивает рассчитанное значение и значение наблюдения времени пробега отраженной волны в качестве входного данного для (трехмерного) алгоритма томографии на отраженных сейсмических волнах с целью определения обновленной скоростной модели 106 для следующей итерации обновления. Система 100 в качестве результата выдает на выходе скоростную модель 106, полученную после последней итерации обновления.
[35] Перед итеративным обновлением скоростной модели 106 система 100 получает сейсмические данные 102 до суммирования, которые характеризуют геологическую область. Сейсмические данные 102 до суммирования могут включать в себя большое количество сейсмических «трасс», при этом каждая трасса характеризует величину движения земли в соответствующем местоположении приемника в результате прохождения сейсмической волны, сгенерированной в соответствующем местоположении источника. Данные 102 до суммирования могут быть сгенерированы (например, во время геологической съемки) путем развертывания группы сейсмических источников (например, пневмопушек или сейсмических вибраторов) и сейсмических приемников (например, геофонов) на поверхности геологической области. Сейсмический источник может генерировать сейсмическую волну, которую распространяет вглубь геологической области, и она отражается от локальной отражающей поверхности. Отраженную сейсмическую волну может регистрировать каждый из множества сейсмических приемников, тем самым генерируя множество сейсмических трасс. Сейсмическая трасса, сгенерированная данным сейсмическим приемником, может быть отображена в виде вектора, каждая компонента которого отображает величину движения земли в местоположении данного сейсмического приемника в соответствующий момент времени.
[36] Система 100 обрабатывает сейсмические данные 102 до суммирования с помощью программы 108 суммирования с целью генерирования сейсмических данных 104 после суммирования. Программа 108 суммирования может генерировать сейсмические данные 104 после суммирования при помощи любой подходящей процедуры суммирования. Например, программа 108 суммирования может генерировать сейсмические данные 104 после суммирования, которые включают в себя большое количество сейсмических трасс, где каждая трасса в сейсмических данных после суммирования получена путем комбинирования (например, осреднения) множества трасс из сейсмических данных 102 до суммирования. Сейсмические данные 104 после суммирования могут включать в себя «более гладкие» трассы с более высоким отношением сигнал-помеха (SNR) по сравнению с сейсмическими данными 102 до суммирования. Помимо генерирования сейсмических данных 104 после суммирования, программа 108 суммирования дополнительно генерирует модель скоростей суммирования (NMO).
[37] Система 100 при помощи программы 110 кинематических характеристик обрабатывает как сейсмические данные 102 до суммирования, так и сейсмические данные 104 после суммирования с целью получения соответствующих кинематических характеристик как из сейсмических данных 102 до суммирования, так и сейсмических данных 104 после суммирования. Конкретнее, система 100 генерирует кинематические характеристики 112 до суммирования по сейсмическим данным 102 до суммирования, и система 100 генерирует кинематические характеристики 114 после суммирования по сейсмическим данным 104 после суммирования. Ниже будет подробно описано, что в некоторых случаях система 100 генерирует кинематические характеристики 112 до суммирования в рамках процедуры улучшения данных на основе нелинейного формирования луча (NLBF), которую применяют к сейсмическим данным 102 до суммирования. В этих случаях система 100 может генерировать сейсмические данные 104 после суммирования из сейсмических данных 102 до суммирования, которые были улучшены с применением процедуры улучшения данных NLBF.
[38] Кинематические характеристики 112 до суммирования и кинематические характеристики 114 после суммирования могут включать в себя одну или несколько из перечисленных: характеристики первой частной производной, характеристики второй частной производной, характеристики кривизны и характеристики подобия. В некоторых случаях система 100 генерирует кинематические характеристики 112 до суммирования, которые описывают подходящее подмножество (то есть, часть) из общего количества сейсмических трасс, включенных в сейсмические данные 102 до суммирования. Например, система 100 может генерировать кинематические особенности 112 до суммирования только для сейсмических трасс, относящихся к крупной сетке в пространстве сейсмических данных до суммирования. Поскольку количество сейсмических трасс, включенных в сейсмические данные 102 до суммирования, может быть большим, система 100 может снизить потребление вычислительных ресурсов (например, накопительных устройств и вычислительной мощности) путем генерирования кинематических характеристик 112 до суммирования только для подходящего подмножества сейсмических данных 102 до суммирования.
[39] После генерирования кинематических характеристик 112 до суммирования и кинематических характеристик 114 после суммирования система итеративно обновляет текущую скоростную модель 106 за несколько итераций обновления. На каждой итерации обновления система 100 обрабатывает кинематические характеристики 114 после суммирования и текущую скоростную модель 106 при помощи программы 116 локализации с целью определения множества отраженных волн 118. Каждая отраженная волна 118 связана с: 1) местоположением сейсмического источника, который распространяет сейсмическую волну; 2) локальной отражающей поверхностью в геологической области, при этом поверхность отражает эту сейсмическую волну; и 3) местоположением сейсмического приемника, который получает отражение сейсмической волны от локальной отражающей поверхности. Система 100 использует текущую скоростную модель 106 для определения рассчитанного времени пробега каждой отраженной волны 118. Определение отраженных волн 118 и расчет времен пробега для отраженных волн 118 по кинематическим характеристикам 114 после суммирования и текущей скоростной модели 106 описаны более подробно со ссылкой на фиг. 6.
[40] Для каждой из отраженных волн 118 система 100 обрабатывает кинематические характеристики 112 до суммирования и модель скоростей суммирования (ее генерирует программа 108 суммирования) с применением программы 120 расчета времен пробега с целью генерирования времени 122 наблюдения пробега для отраженной волны 118. Конкретнее, система 100 может определять время наблюдения 122 пробега для отраженной волны 118, исходя из: 1) нормального приращения времени пробега, полученного из модели скоростей суммирования, и 2) первого поправочного члена, исходя из кинематических характеристик подобия, входящих в состав кинематических характеристик 112 до суммирования. Если кинематические характеристики 112 до суммирования рассчитывают на крупной сетке в пространстве данных до суммирования, тогда система 100 может дополнительно определять время наблюдения 122 пробега, исходя из второго поправочного члена, полученного из кинематических характеристик 112 первой и второй частных производных до суммирования.
[41] Система 100 обрабатывает значения времени 122 наблюдения пробега и рассчитанные времена пробега, сгенерированные для каждой из отраженных волн 118 при помощи программы 124 обновления модели, с целью генерирования обновления 126 скоростной модели. Обновление 126 скоростной модели определяет корректировку текущей скоростной модели 106, которая может привести к уменьшению расхождения между значениями времени 122 наблюдения пробега и рассчитанными временами пробега отраженных волн 118, которые определяют на следующей итерации обновления. Система 100 использует обновление 126 скоростной модели для обновления скоростной модели 106 и при необходимости выполняет одну или несколько дополнительных итераций обновления. Если система 100 определяет, что дальнейшие операции обновления выполнять не следует, система 100 может вывести текущую скоростную модель 106.
[42] На фиг. 2 показан 3D объем 200, который отображает сейсмические данные после суммирования в области общей средней точки (СМР). Конкретнее, сейсмические данные после суммирования отображают в виде 3D матрицы, проиндексированной по х-координатам 202, у-координатам 204 и z-координатам 206. Сейсмические данные после суммирования, соответствующие данной паре координат х-у, отображают времена пробега отражения сейсмических волн, сгенерированных сейсмическими источниками и сейсмическими приемниками с общей средней точкой, заданной координатами х-у. «Средняя точка» между сейсмическим источником и сейсмическим приемником представляет собой точку на прямой линии, соединяющей сейсмический источник и сейсмический приемник, при этом точка находится на одинаковом расстоянии от каждого из них. Координата z относится ко времени. Ниже со ссылкой на фиг.6 будет более подробно описано, что система может определять точки в пространстве данных после суммирования (например, точка 208) со значениями подобия кинематических характеристик, превышающими предварительно заданный порог, как точки, соответствующие локальным отражающим поверхностям (например, локальной отражающей поверхности 210). Направления вдоль и поперек локальной отражающей поверхности 210 обозначены как 212 и 214. Каждая из локальных отражающих поверхностей локализована по глубине путем прослеживания нормального луча и при помощи текущей скоростной модели с целью определения соответствующего местоположения и ориентации локальной отражающей поверхности.
[43] На фиг. 3 показаны отраженные лучи 302 и 304, которые прослежены от локальной отражающей поверхности 306 (то есть, в пространстве данных после суммирования) до поверхности наблюдения с помощью текущей скоростной модели. Времена пробега вдоль этих отраженных лучей (то есть, определенных при помощи текущей скоростной модели) отображают рассчитанное время пробега отраженной волны. Отраженная волна может соответствовать, например: 1) местоположению 308 сейсмического источника; 2) отражающей поверхности 306; и 3) местоположению 310 сейсмического приемника.
[44] На фиг. 4 представлены результаты применения системы 100 моделирования скоростей, описанной в настоящем документе, к синтетическим (то есть, сгенерированным при помощи компьютера) сейсмическим данным до суммирования и после суммирования. Начальная скоростная модель (то есть, используемая на первой итерации обновления), модель истинных скоростей и модель восстановленных скоростей (то есть, скоростная модель, сгенерированная системой 100), изображены в разрезе. То есть, каждая из скоростных моделей изображена в виде «среза» вдоль направлений х-координаты (где «m» означает «метры») и координаты глубины (где «m» означает «метры») полного 3D набора данных, отображающего скоростную модель. Начальная скоростная модель указывает на то, что скорости сейсмических волн в геологической области возрастают с глубиной приблизительно линейно, тогда как модель истинных скоростей указывает на то, что скорости сейсмических волн изменяются с глубиной согласно существенно нелинейной зависимости. Специалистам в данной области техники будет понятно, что восстановленная скоростная модель, сгенерированная системой 100, представляет собой точную аппроксимацию модели истинных скоростей, которая эффективно отражает нелинейную зависимость, определяющую скорости сейсмических волн на различных глубинах.
[45] На фиг. 5 представлена блок-схема примера процедуры 500 для определения скоростной модели на основе кинематических характеристик, полученных по сейсмическим данным как до суммирования, так и после суммирования. Для удобства процедура 500 будет описана как процедура, выполняемая системой одного или нескольких компьютеров, которые расположены в одном или нескольких местоположениях. Например, система моделирования скоростей, например, системы 100 моделирования скоростей на фиг. 1, соответствующим образом запрограммированная согласно настоящему описанию изобретения, может выполнять процедуру 500.
[46] Система получает начальную скоростную модель геологической области, при этом модель описывает скорости сейсмических волн, проходящих через различные местоположения в пространстве геологической области (502). Начальная скоростная модель может представлять собой предварительно заданную (то есть, фиксированную) скоростную модель, например, скоростную модель, которая связывает каждое местоположение в пространстве геологической области с той же предварительно заданной скоростью.
[47] Система получает сейсмические данные до суммирования, которые включают в себя большое количество сейсмических трасс, характеризующих геологическую область (504). Каждая трасса характеризует величину движения земли в соответствующем положении приемника при прохождении сейсмической волны, сгенерированной в соответствующем местоположении источника. В некоторых случаях сейсмические источники и сейсмические приемники, которые используют для генерирования сейсмических данных до суммирования, расположены по ортогональной схеме. Конкретнее, группу сейсмических источников могут распределять (например, с равными интервалами) вдоль первой линии на поверхности геологической области. Группу сейсмических приемников могут распределять (например, с равными интервалами) вдоль второй линии на поверхности геологической области, при этом вторая линия перпендикулярна первой линии. В этом случае сейсмические данные до суммирования называют находящимися «в области поперечного возбуждения». Например, для сейсмических данных до суммирования в области поперечного возбуждения расстояние между данными могут параметризовать по координатам, при этом: 1) х-координата соответствует сейсмическим приемникам, 2) у-координата соответствует сейсмическим источникам, и 3) z-координата соответствует временам пробега отражений.
[48] Система обрабатывает сейсмические данные до суммирования при помощи метода для суммирования с целью генерирования сейсмических данных (506) после суммирования. Например, система может генерировать сейсмические данные после суммирования, которые включают в себя большое количество сейсмических трасс, где каждая трасса в сейсмических данных после суммирования получена путем комбинирования (например, осреднения) множества трасс из сейсмических данных до суммирования. Сейсмические данные после суммирования могут отображать в любом подходящем формате, например, в трехмерной области общей средней точки (СМР). Помимо генерирования сейсмических данных после суммирования система дополнительно генерирует модель скоростей суммирования.
[49] Система обрабатывает сейсмические данные до суммирования и сейсмические данные после суммирования с целью генерирования кинематических характеристик, которые характеризуют, соответственно, сейсмические данные (508) до суммирования и после суммирования. Кинематические характеристики сейсмических данных до суммирования и после суммирования могут отображать наклоны и кривизны сейсмических волновых фронтов в определенных направлениях в соответствующих областях сейсмических данных до суммирования и после суммирования. Конкретнее, кинематические характеристики сейсмических данных до суммирования и после суммирования могут соответствовать первой и второй частным производным времен пробега отражений вблизи опорных точек в пространствах данных до суммирования и после суммирования. Например, кинематические характеристики сейсмических данных до суммирования могут включать в себя первые и вторые частные производные в направлениях х- и у-координат в области поперечного возбуждения. В другом примере кинематические характеристики сейсмических данных после суммирования могут включать в себя первые и вторые частные производные в направлениях х- и у-координат в области общей средней точки. Кинематические характеристики сейсмических данных до суммирования и после суммирования могут также включать в себя характеристики «подобия», которые характеризуют когерентность локальной отраженной волны. Кинематическую характеристику подобия, соответствующую моменту времени в сейсмической трассе до суммирования или после суммирования, могут определять путем расчета взаимной корреляции значения сейсмической трассы в этот момент времени и значений соседних сейсмических трасс в этот момент времени.
[50] Для снижения потребления вычислительных ресурсов система может генерировать кинематические характеристики до суммирования, которые описывают только подходящее подмножество из общего количества сейсмических трасс, включенных в сейсмические данные до суммирования. Например, система может генерировать кинематические характеристики до суммирования только для сейсмических трасс, относящихся к крупной сетке в пространстве сейсмических данных до суммирования. В этом примере, если сейсмические данные до суммирования отображены в области поперечного возбуждения, система может генерировать сейсмические характеристики только для трасс, соответствующих части х- (то есть, сейсмических источников) и у- (то есть, сейсмических приемников) координат.
[51] В некоторых случаях система генерирует кинематические характеристики сейсмических данных до суммирования в рамках процедуры улучшения данных на основе нелинейного формирования луча, которую применяют к сейсмическим данным до суммирования. В частности, процедура улучшения данных может собирать сигналы с соседних трасс в сейсмических данных до суммирования вдоль локально определенных поверхностей, которые описывают локальные приращения времени когерентных сейсмических сигналов. Применение процедуры нелинейного формирования луча к сейсмическим данным до суммирования с целью улучшения данных может повышать отношение сигнал-помеха в сейсмических данных до суммирования. В случаях, когда к сейсмическим данным до суммирования в системе применяют процедуру нелинейного формирования луча с целью улучшения данных, система может генерировать сейсмические данные после суммирования и скорости суммирования, исходя из улучшенных сейсмических данных до суммирования. Генерирование сейсмических данных после суммирования и скоростей суммирования, исходя из улучшенных сейсмических данных до суммирования может повысить надежность и качество сейсмических данных после суммирования.
[52] Стадии 510-514 в совокупности описывают операции, которые могут выполнять на каждой из множества итераций обновления. Ниже будет подробно описано, что текущую скоростную модель обновляют на каждой итерации обновления, и конечную скоростную модель выводят после последней итерации обновления. На первой итерации обновления начальная скоростная модель (то есть, согласно описанию со ссылкой на позицию 502) определяет «текущую» скоростную модель. На каждой последующей итерации обновления «текущая» скоростная модель представляет собой скоростную модель, определенную в конце предшествующей итерации обновления.
[53] Система обрабатывает кинематические характеристики после суммирования и текущую скоростную модель с целью определения множества отраженных волн (510). Каждая отраженная волна соответствует: 1) местоположению сейсмического источника, который распространяет сейсмическую волну; 2) локальной отражающей поверхности в геологической области; и 3) местоположению сейсмического приемника, который получает отражение сейсмической волны от этой локальной отражающей поверхности. Каждая локальная отражающая поверхность может быть охарактеризована: 1) локальными углами наклона локальной отражающей поверхности в продольном и поперечном направлениях, и 2) двойным временем пробега по нормали, соответствующим этой отражающей поверхности. Двойное время пробега по нормали означает двойное время пробега отраженной сейсмической волны, которая распространяется в направлении к локальной отражающей поверхности по нормальному лучу. Местоположение сейсмического источника и сейсмического приемника отраженной волны могут выражать в координатах общей средней точки. Система также определяет соответствующее рассчитанное время пробега для каждой отраженной волны при текущей скоростной модели. Пример процедуры определения отраженных волн и определения расчетных времен пробега по кинематическим характеристикам после суммирования и текущей скоростной модели описан более подробно со ссылкой на фиг. 6.
[54] Система определяет соответствующее время наблюдения пробега каждой из отраженных волн, исходя из: 1) нормального приращения времени пробега, полученного из модели скоростей суммирования, и 2) первого поправочного члена, исходя из кинематических характеристик подобия до суммирования (512). Если кинематические характеристики до суммирования рассчитывают на крупной сетке в пространстве данных до суммирования, тогда время наблюдения пробега могут также определять, исходя из второго поправочного члена, полученного из кинематических характеристик первой и второй частных производных до суммирования.
[55] Система может определять нормальное приращение времени пробега отраженной волны, исходя из нормального двойного времени пробега отраженной волны, расстояния между местоположением источника и местоположением приемника, соответствующих отраженной волне, и скорости суммирования, соответствующей отраженной волне. Например, система может определять нормальное приращение времени пробега отраженной волны как:
где TNMO - нормальное приращение времени пробега отраженной волны, Т0 - нормальное двойное время пробега отраженной волны, h - расстояние между местоположением источника и местоположением приемника, соответствующими отраженной волне, Xr и - х-координаты, соответствующие местоположениям приемника и источника,
- х-координаты, соответствующие местоположениям приемника и источника, и Fs - у-координаты, соответствующие местоположениям приемника и источника, которые соответствуют отраженной волне, и VNMO - скорость суммирования, соответствующая отраженной волне. Координаты местоположений источника и приемника могут определять в области общей средней точки.
и Fs - у-координаты, соответствующие местоположениям приемника и источника, которые соответствуют отраженной волне, и VNMO - скорость суммирования, соответствующая отраженной волне. Координаты местоположений источника и приемника могут определять в области общей средней точки.
[56] Система может определять первый поправочный член, исходя из кинематических характеристик подобия до суммирования. Например, система может определять первый поправочный член путем определения расстояния по нормальному приращению времени пробега отраженной волны, которое максимально увеличивает кинематическую характеристику подобия вдоль трассы до суммирования, соответствующей местоположению источника и приемника отраженной волны. То есть, система может определять первый поправочный член как:

где dTSEMBL - первый поправочный член, ∈ - положительная константа, и Semblance (Xr, Yr, Xs, Ys, TNMO+dT) - значение кинематической характеристики подобия трассы данных до суммирования, соответствующее местоположению источника (Xr,  ) и местоположению приемника (
) и местоположению приемника ( , Ys) в момент времени TNM0+dT.
, Ys) в момент времени TNM0+dT.
[57] Система может определять время наблюдения пробега TOBS отраженной волны, исходя из нормального приращения времени пробега TNMO и первого поправочного члена dTSEMBL, соответствующих отраженной волне. Например, система может определять время наблюдения пробега отраженной волны как:

где TNMO определяется уравнением 1, a dTSEMBL определяется уравнением 3.
[58] Система может определять время наблюдения пробега отраженной волны другим способом, если система рассчитывает кинематические характеристики до суммирования на крупной сетке в пространстве данных до суммирования (то есть, вместо вычисления кинематических характеристик до суммирования для каждой трассы до суммирования). В частности, система может определять «параметрическую» трассу до суммирования путем определения трассы до суммирования, которая представляет собой ближайшую трассу к трассе до суммирования, соответствующей отраженной волне, из числа трасс до суммирования, для которых были рассчитаны кинематические характеристики. Трасса до суммирования, соответствующая отраженной волне представляет собой трассу до суммирования, соответствующую тем же местоположениям источника и приемника, что и отраженная волна. Местоположение источника параметрической трассы в настоящем описании изобретения имеет вид  , местоположение приемника параметрической трассы в настоящем описании изобретения имеет вид
, местоположение приемника параметрической трассы в настоящем описании изобретения имеет вид  . Система может определять «близость» соответствующих трасс, исходя из любой подходящей численной меры сходства, например, евклидова расстояния между приемниками и источниками соответствующих трасс (например, согласно уравнению 5).
. Система может определять «близость» соответствующих трасс, исходя из любой подходящей численной меры сходства, например, евклидова расстояния между приемниками и источниками соответствующих трасс (например, согласно уравнению 5).
[59] После определения параметрической трассы система может определить нормальное приращение времени пробега отраженной волны в соответствии с уравнением 1, где расстояние h имеет вид:

[60] Система может определять первый поправочный член, исходя из кинематических характеристик подобия, соответствующих параметрической трассе. Например, система может определять первый поправочный член в виде:

, где переменные в уравнении 6 определены аналогично переменным в уравнении 3.
[61] Система может определять второй поправочный член dTNLBF, исходя из первой и второй частных производных кинематических характеристик до суммирования, соответствующих параметрической трассе. Например, система может определять второй поправочный член в виде:
где А - первая частная производная по направлению х, В - первая частная производная по направлению у, С - частная производная по направлению х и у, D - вторая частная производная по направлению х, и Е - вторая частная производная по направлению у, где все частные производные рассчитывают (при помощи любого подходящего численного метода) по параметрической трассе до суммирования (например, в области поперечного возбуждения), Xr - х-координата приемника отраженной волны, и Ys - у-координата источника отраженной волны.
[62] Система может определять время наблюдения пробега отраженной волны, исходя из нормального приращения времени пробега TNMO, первого поправочного члена dTSEMBL и второго поправочного члена dTNLBF, соответствующих отраженной волне. Например, система может определять время наблюдения пробега отраженной волны в виде:

[63] Система обновляет текущую скоростную модель, исходя из разности между рассчитанным и временем наблюдения пробега для каждой отраженной волны (514). Система может определять обновление текущей скоростной модели при помощи любого метода для томографической инверсии, например, метода для томографической инверсии, которое описано со ссылкой на работу Woodward et al., "A decade of tomography", Geophysics, 73 (5), VE5-VE11, 2008.
[64] Система продолжает итеративно повторять стадии 510-514 до тех пор, пока разность между рассчитанным и значениями времени наблюдения пробега отраженной волны не будет минимизирована (или приблизительно минимизирована). После того, как определено, что разность между рассчитанным и временем наблюдения пробега отраженной волны минимизирована (или приблизительно минимизирована), система может выводить полученную скоростную модель (516).
[65] На фиг. 6 представлена блок-схема примера процедуры 600 определения отраженных волн и определения рассчитанных времени пробега с применением текущей скоростной модели и кинематических характеристик сейсмических данных после суммирования. Для удобства процедура 600 будет описана как процедура, выполняемая системой одного или нескольких компьютеров, которые расположены в одном или нескольких местоположениях. Например, система моделирования скоростей, например, система 100 моделирования скоростей на фиг. 1, соответствующим образом запрограммированная согласно настоящему описанию изобретения, может выполнять процедуру 600.
[66] Система определяет локальные отражающие поверхности по кинематическим характеристикам данных после суммирования (602). Например, система может определить, что любая точка на трассе данных после суммирования со значениями подобия кинематических характеристик, превышающими предварительно заданный порог, соответствует локальной отражающей поверхности. Система может характеризовать локальную отражающую поверхность локальными углами наклона локальной отражающей поверхности в продольном и поперечном направлениях (которые могут быть определены, например, по кинематическим характеристикам данных после суммирования), двойным временем пробега по нормальному лучу к локальной отражающей поверхности, и общей средней точке, связанной с точкой на локальной отражающей поверхности.
[67] Система определяет соответствующее пространственное местоположение каждой определенной локальной отражающей поверхности при помощи текущей скоростной модели (604). Пространственное местоположение локальной отражающей поверхности могут определять по пространственным координатам точки на локальной отражающей поверхности и нормальному вектору к локальной отражающей поверхности.
Пространственные координаты точки на локальной отражающей поверхности могут определять по координатам (х, у, z), где координаты х и у определены в области общих средних точек, а координата z представляет глубину. Нормальный вектор могут определять в этой же системе координат. Система может определять пространственное местоположение локальной отражающей поверхности путем прослеживания луча от точки (ХСМР, YCMP) на поверхности наблюдения, которая соответствует точке на локальной отражающей поверхности с начальным направлением, определенным в продольном и поперечном направлениях локальной отражающей поверхности. Система прослеживает луч в текущей скоростной модели до тех пор, пока не будет исчерпана половина времени прохождения в прямом и обратном направлении вдоль нормального луча к локальной отражающей поверхности. Окончательное местоположение и ориентация прослеженного луча отвечает пространственному местоположению локальной отражающей поверхности.
[68] Система определяет множество отраженных волн, соответствующих локальным отражающим поверхностям (606). Каждая отраженная волна соответствует: 1) местоположению сейсмического источника, который распространяет сейсмическую волну; 2) локальной отражающей поверхности; и 3) местоположению сейсмического приемника, который получает отражение сейсмической волны от этой локальной отражающей поверхности. Например, система может определять отраженную волну, соответствующую локальной отражающей поверхности, путем прослеживания двух соответствующих лучей, проходящих от пространственного местоположения локальной отражающей поверхности к поверхности наблюдений. Эти два луча выбирают так, чтобы на локальной отражающей поверхности был выполнен закон Снеллиуса. Соответствующие местоположения, в которых лучи пересекают поверхность наблюдения, определяют местоположение сейсмического источника и сейсмического приемника, которые соответствуют локальной отражающей поверхности.
[69] В настоящем описании изобретения термин «рассчитанный на» используется в отношении компонентов систем и компьютерных программ. То, что система из одного или нескольких компьютеров рассчитана на выполнение определенных операций или действий, означает, что в системе установлено программное обеспечение, встроенное программное обеспечение, аппаратное обеспечение или их сочетание, которые в процессе работы приводят к тому, что система выполняет эти операции или действия. То, что одна или несколько компьютерных программ рассчитаны на выполнение конкретных операций или действий, означает, что одна или несколько программ содержат команды, выполнение которых устройством для обработки данных приводит к выполнению устройством этих операций или действий.
[70] Варианты осуществления предмета изобретения и функциональные операции, описанные в настоящем документе, могут быть реализованы в виде цифровых электронных схем, в реально осуществленном компьютерном программном или аппаратном обеспечении, в компьютерном аппаратном обеспечении, включая структуры, раскрываемые в настоящем описании изобретения, и их структурные эквиваленты, или в виде сочетаний одного или нескольких из перечисленных вариантов. Варианты осуществления предмета изобретения, описанные в настоящем документе, могут быть реализованы в виде одной или нескольких компьютерных программ, то есть, одного или нескольких модулей команд компьютерных программ, содержащихся в реальной среде для постоянного хранения, с целью исполнения на устройстве для обработки данных или управления его работой. Компьютерное запоминающее устройство может представлять собой машиночитаемое запоминающее устройство, машиночитаемый носитель информации, запоминающее устройство с произвольным или последовательным доступом или сочетание одного или нескольких перечисленных вариантов. Согласно другому варианту или дополнительно команды программ могут быть запрограммированы в искусственно сгенерированном распространяемом сигнале, например, автоматически сгенерированном электрическом, оптическом или электромагнитном сигнале, причем этот сигнал генерируют для кодирования информации с целью передачи на подходящее приемное устройство для исполнения устройством, предназначенным для обработки данных.
[71] Термин «устройство для обработки данных» относится к аппаратному обеспечению для обработки данных, он включает в себя все устройства, приспособления и сочетания устройств для обработки данных, в том числе, например, программируемый процессор, компьютер или несколько процессоров или компьютеров. Устройство также может представлять собой или дополнительно включать в себя логическую схему специального назначения, например, программируемую логическую интегральную схему (FPGA) или специализированную интегральную схему (ASIC). При необходимости устройство может включать в себя, помимо аппаратного обеспечения, код, который создает среду выполнения компьютерных программ, например, код, который представляет собой встроенное программное обеспечение процессора, пакет протоколов, систему управления базой данных, операционную систему или сочетание одного или нескольких перечисленных вариантов.
[72] Компьютерная программа, которую могут также называть или описывать как программу, программное обеспечение, прикладное программное средство, приложение, модуль, программный модуль, скрипт или код, может быть написана на любом языке программирования, включая компилируемые или интерпретируемые языки, или декларативные или процедурные языки; и она может быть развернута в любом виде, в том числе, как отдельная программа или как модуль, компонента, подпрограмма или другая компонента, пригодная для использования в вычислительной среде. Программе может соответствовать файл в файловой системе, но не обязательно. Программу могут хранить в части файла, который содержит другие программы или данные, например, один или несколько скриптов, в одном файле, относящемся к упомянутой программе, или в нескольких взаимосвязанных файлах, например, в файлах, в которых хранят один или несколько модулей, подпрограмм или фрагментов кода. Компьютерную программу могут развертывать на одном или нескольких компьютерах, размещенных на одном узле или распределенных по нескольким узлам и связанных между собой сетью обмена данными.
[73] В настоящем описании изобретения термин «программа» используется в широком смысле для обозначения программных систем, подсистем или процессов, запрограммированных для выполнения одной или нескольких конкретных функций. Как правило, программу реализуют в виде одного или нескольких модулей, устанавливаемых на одном или нескольких компьютерах в одном или нескольких местоположениях. В некоторых случаях один или несколько компьютеров будут выделены для определенной программы; в других случаях несколько программ могут устанавливать и запускать на одном компьютере или нескольких компьютерах.
[74] Процессы и логические потоки, описанные в настоящем документе, могут выполняться одним или несколькими программируемыми компьютерами, выполняющими одну или несколько компьютерных программ для выполнения функций путем управления входными данными и генерирования выходных данных. Процессы и логические потоки могут также исполняться логическими схемами специализированного назначения, например, программируемой логической интегральной схемой (FPGA) или специализированной интегральной схемой (ASIC), или сочетанием логической схемы специального назначения и одного или нескольких программируемых компьютеров.
[75] Компьютеры, пригодные для выполнения компьютерных программ, могут быть основаны на микропроцессорах общего или специального назначения, или на центральном процессоре любого другого типа. Как правило, центральный процессор будет получать команды и данные с постоянного запоминающего устройства или запоминающего устройства произвольного доступа или с обоих устройств. Центральный процессор для выполнения команд и одно или несколько запоминающих устройств для хранения команд и данных представляют собой существенные элементы компьютера. Центральный процессор и накопительное устройство могут дополнять специализированными интегральными схемами или включать их в состав. Как правило, компьютер будет также включать в себя или будет функционально подключен к одному или нескольким запоминающим устройствам для хранения данных с целью получения данных или передачи данных, например, к магнитным, магнитооптическим дискам или оптическим дискам. Однако такие устройства на компьютере не обязательны. Кроме того, компьютер может быть встроен в другое устройство, например, в мобильный телефон, карманный персональный компьютер (PDA), мобильный аудио или видео проигрыватель, игровую консоль, приемник сигналов глобальной системы позиционирования (GPS) или портативное устройство хранения данных, например, накопитель с интерфейсом универсальной последовательной шины (USB), и другие.
[76] К машиночитаемым носителям, пригодным для хранения команд компьютерной программы и данных, относят все виды энергонезависимых запоминающих устройств, устройств хранения данных и запоминающих устройств, в том числе, например, полупроводниковые накопительные устройства, такие как EPROM, EEPROM и устройства флеш-памяти; магнитные диски, например, внутренние жесткие диски или съемные диски; магнитооптические диски; и диски CD-ROM и DVD-ROM.
[77] Для обеспечения взаимодействия с пользователем варианты осуществления предмета изобретения, описанные в настоящем документе, могут быть реализованы на компьютере, оснащенном устройством визуализации, например, монитором с ЭЛТ (электронно-лучевой трубкой) или ЖКЭ (жидкокристаллическим экраном) для просмотра информации пользователем, и клавиатурой, и указательным устройством, например, мышью или шаровым устройством ввода, при помощи которых пользователь может осуществлять ввод данных в компьютер. Для взаимодействия с пользователем могут также использовать другие виды устройств; например, обратную связь с пользователем могут обеспечивать при помощи любого вида сенсорной обратной связи, например, визуальной обратной связью, слуховой обратной связью или тактильной обратной связью; а информацию от пользователя могут получать в любом виде, в том числе, при помощи акустического, речевого или тактильного ввода. Кроме того, компьютер может взаимодействовать с пользователем, отправляя и получая документы с устройства, которое применяет пользователь, например, посылая веб-страницы в веб-браузер на пользовательском устройстве в ответ на запросы, получаемые от веб-браузера. Компьютер может также взаимодействовать с пользователем, отправляя текстовые сообщения или сообщения других видов на персональное устройство, например, на смартфон, на котором запущено приложение для обмена сообщениями, и получая ответные сообщения от пользователя.
[78] Устройства обработки данных для реализации моделей машинного обучения могут также предусматривать, например, специализированные аппаратные ускорители для обработки общих и требующих большой вычислительной мощности процедур машинного обучения в процессе обучения или применения модели, т.е. логического вывода, рабочих нагрузок.
[79] Модели машинного обучения могут быть реализованы и развернуты с применением платформы машинного обучения, например, платформы TensorFlow, платформы Microsoft Cognitive Toolkit, платформы Apache Singa или платформы Apache MXNet.
[80] Варианты осуществления предмета изобретения, описанного в настоящем документе, могут быть реализованы в вычислительной системе, которая предусматривает внутренний компонент, работающий, например, как сервер данных, или предусматривает компонент промежуточного слоя, например, сервер приложений, или предусматривает интерфейсный компонент, например, клиентский компьютер с графическим пользовательским интерфейсом, веб-браузер или приложение, посредством которого пользователь может взаимодействовать с реализацией предмета изобретения, описанного в настоящем документе, или в виде любого сочетания одной или нескольких таких внутренних компонент, компонент промежуточного слоя или интерфейсных компонент. Компоненты системы могут быть связаны друг с другом при помощи любого вида или любой среды обмена цифровыми данными, например, сети передачи данных. К примерам сетей передачи данных относят локальную вычислительную сеть (LAN) и глобальную сеть (WAN), например, интернет.
[81] Вычислительная система может предусматривать клиентские и серверные части. Клиент и сервер, как правило, удалены друг от друга и обычно взаимодействуют через сеть обмена данными. Взаимосвязь клиента и сервера устанавливается благодаря компьютерным программам, выполняемым на соответствующих компьютерах и имеющим между собой отношения клиент-сервер. Согласно некоторым вариантам осуществления, сервер передает данные, например, страницу HTML, на пользовательское устройство, выступающее в роли клиента, например, в целях отображения данных и получения пользовательского ввода от пользователя, взаимодействующего с устройством. Данные, сгенерированные на пользовательском устройстве, например, результат взаимодействия с пользователем, могут быть получены сервером от этого устройства.
[82] Несмотря на то, что настоящее описание изобретения содержит много конкретных деталей реализации, их следует истолковывать не как ограничения объема того, что может быть заявлено в качестве изобретения, а как описания признаков, характерных для конкретных вариантов осуществления. Конкретные признаки, описанные в настоящем описании изобретения в связи с отдельными вариантами осуществления, могут также быть совместно реализованы в одном варианте осуществления. И наоборот, различные признаки, описанные в связи с одним вариантом осуществления, могут быть также реализованы в нескольких вариантах осуществления по отдельности или в любой подходящей субкомбинации. Кроме того, несмотря на то, что признаки могут быть описаны в настоящем описании изобретения как действующие в определенных сочетаниях и даже первоначально заявлены как таковые, один или несколько признаков из заявленного сочетания в некоторых случаях могут быть изъяты из сочетания, и заявленное сочетание может быть применено в субкомбинации или некотором варианте субкомбинации.
[83] Аналогично, несмотря на то, что операции изображены на чертежах перечислены в формуле изобретения в определенном порядке, это не следует понимать как требование того, чтобы для достижения желаемых результатов такие операции выполнялись в определенном показанном порядке или последовательно, или чтобы были выполнены все проиллюстрированные операции. При определенных обстоятельствах выгодными могут быть многозадачность и параллелизация. Кроме того, разделение различных модулей и компонент системы в вариантах осуществления, описанных в настоящем документе, не следует понимать как требование такого разделения во всех вариантах осуществления, и следует понимать, что описанные программные компоненты и системы могут быть, как правило, объединены в единый программный продукт или объединены в пакет из нескольких программных продуктов.
[84] Были описаны конкретные варианты осуществления предмета изобретения. Другие варианты осуществления находятся в пределах объема приведенной ниже формулы изобретения. Например, действия, перечисленные в формуле изобретения, можно выполнять в другом порядке и при этом достигать желаемых результатов. Например, процедуры, изображенные на приложенных фигурах, необязательно требуют конкретного показанного порядка или последовательного порядка для достижения желаемых результатов. В некоторых случаях выгодными могут быть многозадачность и параллельная обработка.
Настоящее изобретение относится к томографии на отраженных сейсмических волнах. Заявлены способ, устройство для определения скоростной модели геологической области, содержащие компьютерные программы, которые запрограммированы на компьютерном носителе информации. Согласно одному аспекту способ предусматривает: получение текущей скоростной модели геологической области; получение сейсмических данных до суммирования и после суммирования, характеризующих геологическую область; и для каждой из множества итераций: определение множества отраженных волн по сейсмическим данным после суммирования и текущей скоростной модели; определение соответствующего времени наблюдения пробега для каждой из множества отраженных волн, предусматривающее для каждой отраженной волны определение соответствующего времени наблюдения пробега отраженной волны, исходя, по меньшей мере частично, из кинематических характеристик, полученных по соответствующей сейсмической трассе, которая содержится в сейсмических данных до суммирования; и обновление текущей скоростной модели, исходя, по меньшей мере частично, из значений времени наблюдения пробега множества отраженных волн. Технический результат – повышение точности и информативности получаемых данных. 3 н. и 17.з.п. ф-лы, 6 ил.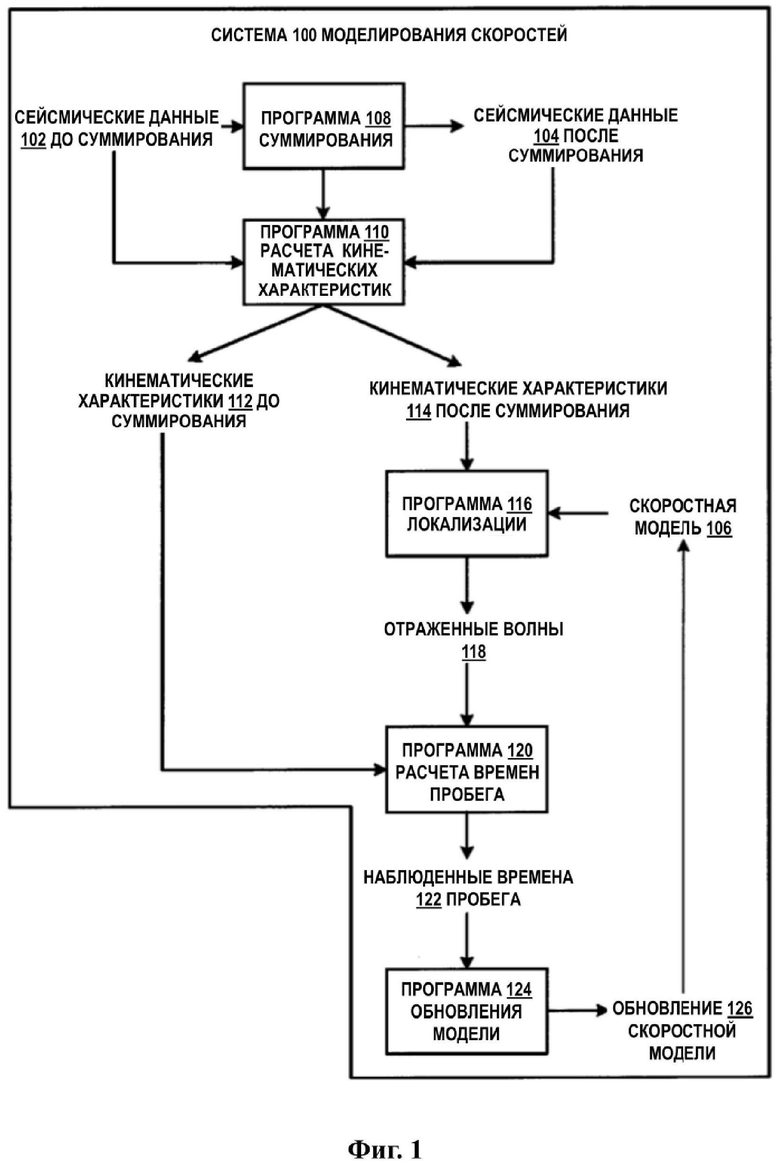
1. Способ сейсмической томографии на отраженных сейсмических волнах, реализуемый на одном или нескольких устройств для обработки данных, при этом способ предусматривает:
получение текущей скоростной модели для геологической области, при этом для каждого из множества местоположений в пространстве геологической области модель описывает соответствующую скорость сейсмических волн, проходящих через это местоположение в пространстве;
получение: (i) сейсмических данных до суммирования, которые содержат множество сейсмических трасс, описывающих геологическую область, и (ii) сейсмических данных после суммирования, сгенерированных из сейсмических данных до суммирования с применением метода для сейсмического суммирования; и
для каждой из множества итераций:
определение по сейсмическим данным после суммирования и текущей скоростной модели множества отраженных волн, при этом каждая отраженная волна соответствует: (i) местоположению сейсмического источника, который распространяет эту сейсмическую волну; (ii) локальной отражающей поверхности в геологической области; и (iii) местоположению сейсмического приемника, который получает отражение этой сейсмической волны от локальной отражающей поверхности;
определение соответствующего времени наблюдения пробега для каждой из множества отраженных волн, при этом определение предусматривает для каждой отраженной волны:
определение соответствующей сейсмической трассы, входящей в состав сейсмических данных до суммирования, исходя из отраженной волны; а также
определение соответствующего времени наблюдения пробега волны для отраженной волны, исходя, по меньшей мере частично, из кинематических характеристик, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования; и
обновление текущей скоростной модели, исходя, по меньшей мере частично, из значений времени наблюдения пробега множества отраженных волн.
2. Способ по п. 1, дополнительно предусматривающий:
генерирование улучшенных сейсмических данных до суммирования путем применения к сейсмическим данным до суммирования метода для нелинейного формирования луча с целью улучшения данных, которое предусматривает получение кинематических характеристик сейсмических трасс, входящих в состав сейсмических данных до суммирования;
при этом сейсмические данные после суммирования генерируют путем обработки улучшенных сейсмических данных до суммирования с применением метода для сейсмического суммирования.
3. Способ по п. 2, в котором получение кинематических характеристик сейсмических трасс, входящих в состав сейсмических данных до суммирования, предусматривает генерирование первых частных производных, вторых частных производных и характеристик подобия в опорных точках сейсмических данных до суммирования.
4. Способ по п. 3, в котором опорные точки в сейсмических данных до суммирования расположены на крупной сетке.
5. Способ по п. 1, в котором определение отраженной волны предусматривает: определение точки в сейсмических данных после суммирования, которая отвечает
соответствующей локальной отражающей поверхности, исходя из кинематической характеристики, полученной в этой точке сейсмических данных после суммирования;
определение пространственного местоположения соответствующей локальной отражающей поверхности путем прослеживания лучей при помощи текущей скоростной модели, предусматривающее прослеживание луча от поверхности наблюдения в текущую скоростную модель до истечения половины времени прохождения в прямом и обратном направлении вдоль нормального луча до соответствующей локальной отражающей поверхности; и
определение местоположения соответствующего сейсмического источника и местоположение соответствующего сейсмического приемника исходя из пространственного местоположения соответствующей локальной отражающей поверхности.
6. Способ по п. 5, в котором:
определение местоположения соответствующего сейсмического источника предусматривает:
прослеживание первого луча от пространственного местоположения соответствующей локальной отражающей поверхности до поверхности наблюдения при помощи текущей скоростной модели; и
определение местоположения соответствующего сейсмического источника, исходя из местоположения, в котором первый луч проходит через поверхность наблюдения; и
определение местоположения соответствующего сейсмического приемника предусматривает:
прослеживание второго луча от пространственного местоположения соответствующей локальной отражающей поверхности до поверхности наблюдения при помощи текущей скоростной модели; и
определение местоположения соответствующего сейсмического приемника, исходя из местоположения, в котором второй луч проходит через поверхность наблюдения.
7. Способ по п. 1, в котором определение соответствующего времени наблюдения пробега волны для отраженной волны исходя, по меньшей мере частично, из кинематических характеристик, полученных из соответствующей сейсмической трассы, входящей в состав сейсмических данных до суммирования, предусматривает:
определение приращения времени пробега отраженной волны по модели приращения скоростей;
определение первого поправочного члена, исходя из кинематических характеристик, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования, предусматривающее:
определение первого времени, на котором кинематическую характеристику подобия, полученную из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования, локально максимально увеличивают исходя из приращения времени пробега отраженной волны, и определение первого поправочного члена, исходя из первого времени;
определение соответствующего времени наблюдения пробега для отраженной волны, исходя из приращения времени пробега отраженной волны и первого поправочного члена.
8. Способ по п. 7, в котором:
кинематические характеристики рассчитывают только для подходящего подмножества сейсмических трасс из сейсмических данных до суммирования; и
определение соответствующей сейсмической трассы, входящей в состав сейсмических данных до суммирования, исходя из отраженной волны, предусматривает:
определение того, что соответствующая сейсмическая трасса представляет собой ближайшую сейсмическую трассу к данной сейсмической трассе, соответствующей сейсмическому источнику и сейсмическому приемнику отраженной волны, из подходящего подмножества сейсмических трасс сейсмических данных до суммирования, для которых рассчитаны кинематические характеристики.
9. Способ по п. 8, дополнительно предусматривающий:
определение второго поправочного члена, исходя из кинематических характеристик, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования, предусматривающее:
определение второго поправочного коэффициента, исходя из: (i) кинематических характеристик первой и второй частных производных, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования; и (ii) расстояния между соответствующей сейсмической трассой и данной сейсмической трассой, соответствующей сейсмическому источнику и сейсмическому приемнику отраженной волны; и
определение, исходя из второго поправочного члена, соответствующего времени наблюдения пробега, дополнительно к приращению времени пробега отраженной волны и первому поправочному члену.
10. Способ по п. 1, в котором:
определение множества отраженных волн по сейсмическим данным после суммирования и текущей скоростной модели предусматривает определение соответственного рассчитанного времени пробега для каждой из множества отраженных волн; и
обновление текущей скоростной модели предусматривает:
для каждой из множества отраженных волн определение разности между рассчитанным временем пробега отраженной волны и временем наблюдения пробега отраженной волны; и
определение обновления для текущей скоростной модели, исходя из разностей между рассчитанными временами пробега и значениями времени наблюдения пробега, при помощи способа томографической инверсии.
11. Способ по п. 1, который после окончательной итерации обновления дополнительно предусматривает:
обеспечение текущей скоростной модели для применения при описании характеристик геологической области.
12. Система сейсмической томографии на отраженных сейсмических волнах, которая предусматривает:
один или несколько компьютеров; и
одно или несколько запоминающих устройств, соединенных с одним или несколькими компьютерами, где одно или несколько запоминающих устройств хранят команды, которые при выполнении одним или несколькими компьютерами приводят к тому, что один или несколько компьютеров выполняют операции, предусматривающие:
получение текущей скоростной модели для геологической области, при этом для каждого из множества местоположений в пространстве геологической области модель описывает соответствующую скорость сейсмических волн, проходящих через это местоположение; и
получение: (i) сейсмических данных до суммирования, которые содержат множество сейсмических трасс, описывающих геологическую область, и (ii) сейсмические данные после суммирования, сгенерированные из сейсмических данных до суммирования с применением метода для сейсмического суммирования;
для каждой из множества итераций:
определение по сейсмическим данным после суммирования и текущей скоростной модели множества отраженных волн, при этом каждая отраженная волна соответствует: (i) местоположению сейсмического источника, который распространяет эту сейсмическую волну; (ii) локальной отражающей поверхности в геологической области; и (ii) местоположению сейсмического приемника, который получает отражение этой сейсмической волны от локальной отражающей поверхности;
определение соответствующего времени наблюдения пробега для каждой из множества отраженных волн, при этом определение предусматривает для каждой отраженной волны:
определение соответствующей сейсмической трассы, входящей в состав сейсмических данных до суммирования, исходя из отраженной волны; а также
определение соответствующего времени наблюдения пробега волны для отраженной волны, исходя, по меньшей мере частично, из кинематических характеристик, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования; и
обновление текущей скоростной модели, исходя, по меньшей мере частично, из значений времени наблюдения пробега множества отраженных волн.
13. Система по п. 12, в которой операции дополнительно предусматривают: генерирование улучшенных сейсмических данных до суммирования путем применения к сейсмическим данным до суммирования метода для нелинейного формирования луча с целью улучшения данных, которое предусматривает получение кинематических характеристик сейсмических трасс, входящих в состав сейсмических данных до суммирования;
при этом сейсмические данные после суммирования генерируют путем обработки улучшенных сейсмических данных до суммирования с применением метода для сейсмического суммирования.
14. Система по п. 13, в которой получение кинематических характеристик сейсмических трасс, входящих в состав сейсмических данных до суммирования, предусматривает генерирование первых частных производных, вторых частных производных и характеристик подобия в опорных точках сейсмических данных до суммирования.
15. Система по п. 14, в которой опорные точки в сейсмических данных до суммирования расположены на крупной сетке.
16. Система по п. 12, в которой определение отраженной волны предусматривает:
определение точки в сейсмических данных после суммирования, которая отвечает соответствующей локальной отражающей поверхности, исходя из кинематической характеристики, полученной в этой точке сейсмических данных после суммирования;
определение пространственного местоположения соответствующей локальной отражающей поверхности путем прослеживания лучей при помощи текущей скоростной модели, предусматривающее прослеживание луча от поверхности наблюдения в текущую скоростную модель до истечения половины времени прохождения в прямом и обратном направлении вдоль нормального луча до соответствующей локальной отражающей поверхности; и
определение местоположения соответствующего сейсмического источника и местоположение соответствующего сейсмического приемника, исходя из пространственного местоположения соответствующей локальной отражающей поверхности.
17. Энергонезависимый носитель информации для хранения команд, при исполнении которых одним или несколькими компьютерами один или несколько компьютеров выполняют операции сейсмической томографии на отраженных сейсмических волнах, предусматривающие:
получение текущей скоростной модели для геологической области, при этом для каждого из множества местоположений в пространстве геологической области модель описывает соответствующую скорость сейсмических волн, проходящих через это местоположение в пространстве;
получение: (i) сейсмических данных до суммирования, которые содержат множество сейсмических трасс, описывающих геологическую область, и (ii) сейсмических данных после суммирования, сгенерированных из сейсмических данных до суммирования с применением метода для сейсмического суммирования; и
для каждой из множества итераций:
определение по сейсмическим данным после суммирования и текущей скоростной модели множества отраженных волн, при этом каждая отраженная волна соответствует: (i) местоположению сейсмического источника, который распространяет эту сейсмическую волну; (ii) локальной отражающей поверхности в геологической области; и (iii) местоположению сейсмического приемника, который получает отражение этой сейсмической волны от локальной отражающей поверхности;
определение соответствующего времени наблюдения пробега для каждой из множества отраженных волн, при этом определение предусматривает для каждой отраженной волны:
определение соответствующей сейсмической трассы, входящей в состав сейсмических данных до суммирования, исходя из отраженной волны; а также
определение соответствующего времени наблюдения пробега волны для отраженной волны, исходя, по меньшей мере частично, из кинематических характеристик, полученных из соответствующей сейсмической трассы, которая входит в состав сейсмических данных до суммирования; и
обновление текущей скоростной модели, исходя, по меньшей мере частично, из значений времени наблюдения пробега множества отраженных волн.
18. Энергонезависимый носитель информации по п. 17, в котором операции дополнительно предусматривают:
генерирование улучшенных сейсмических данных до суммирования путем применения к сейсмическим данным до суммирования метода для нелинейного формирования луча с целью улучшения данных, которое предусматривает получение кинематических характеристик сейсмических трасс, входящих в состав сейсмических данных до суммирования;
при этом сейсмические данные после суммирования генерируют путем обработки улучшенных сейсмических данных до суммирования с применением метода для сейсмического суммирования.
19. Энергонезависимый носитель информации по п. 18, в котором получение кинематических характеристик сейсмических трасс, входящих в состав сейсмических данных до суммирования, предусматривает генерирование первых частных производных, вторых частных производных и характеристик подобия в опорных точках сейсмических данных до суммирования.
20. Энергонезависимый носитель информации по п. 19, в котором опорные точки сейсмических данных до суммирования расположены на крупной сетке.
| Гадыльшин.К.Г., Неклюдов Д.А., Протасов М.И., Исаков Н.Г., ПравдухинА.П., "АЛГОРИТМ 3D КИНЕМАТИЧЕСКОЙ ТОМОГРАФИИ НА ОТРАЖЕННЫХ ВОЛНАХ ДЛЯ ПОСТРОЕНИЯ НАЧАЛЬНОЙ СКОРОСТНОЙ МОДЕЛИ ДЛЯ МИГРАЦИОННОГО СКОРОСТНОГО АНАЛИЗА", Интерэкспо ГЕО-Сибирь, XIV Междунар | |||
| науч | |||
| конгр., 23-27 апреля 2018 г., Новосибирск : Междунар | |||
| науч | |||
| конф."Недропользование |

