Область техники, к которой относится изобретение
Настоящее изобретение относится к области обработки изображений, и, более конкретно, к поддержке принятия врачебных решений на основе анализа медицинских изображений.
Уровень техники
Морфологические аномалии тазобедренного сустава являются одними из наиболее распространенных заболеваний опорно-двигательного аппарата человека, и их диагностика обычно основывается на сочетании клинических и рентгенологических исследований. Рентгенологические исследования направлены на количественную оценку формы и пространственных взаимосвязей между бедренной костью, головкой бедренной кости и вертлужной впадиной с использованием рентгеновской компьютерной томографии (КТ) в переднезадней проекции или магнитно-резонансных (МР) изображений сустава. Ортопедическое сообщество составило список анатомических показателей, характеризующих различные аномалии тазобедренного сустава, многие из которых на ранних, легко поддающихся лечению стадиях протекают бессимптомно. В рамках различных систематических обзоров, проведенных в уровне техники, было показано, например, что около 22% из бессимптомных добровольцев имели признаки импинджмента тазобедренного сустава, которые можно было наблюдать на медицинских изображениях, и до 19% из бессимптомных добровольцев имели невыявленную дисплазию тазобедренного сустава. Выявление бессимптомных или ранних стадий аномалий тазобедренного сустава может быть достигнуто путем изучения изображений тазовых/абдоминальных областей пациентов, полученных по причинам, отличным от визуализации тазобедренного сустава. Поиск аномалий тазобедренного сустава на всех таких изображениях требует много времени и ресурсов, поэтому не должен выполняться врачами. Это освобождает место для решений на базе компьютерной диагностики (CAD), которые могут самостоятельно сканировать изображения бессимптомных пациентов и предупреждать пользователя об обнаруженных потенциальных аномалиях.
Автоматическое обнаружение и сегментация бедренной кости и вертлужной впадины на медицинских изображениях обычно являются начальными этапами компьютерной диагностики аномалий тазобедренного сустава. Ранние методы в этой области были основаны на эвристике и комбинированной пороговой обработке изображений, фильтрации, разложении связанных компонентов и т.д. для улучшения распознавания кости и края кости. Многие из таких алгоритмов основаны на относительной сферичности головки бедренной кости, что позволяет надежно идентифицировать ее с помощью сопоставления сферических шаблонов или нахождения точки пересечения векторов градиента, инициализированных на краях кости. В дальнейшем был выпущен ряд статей, в которых проверялась идея о том, что головки бедренных костей и чашечки вертлужной впадины могут быть аппроксимированы сферическими формами, и было обнаружено, что сфера уже является хорошим приближением к здоровой головке бедренной кости с ошибкой подгонки поверхности около 0,87 мм, в то время как более сложный суперовоид может захватывать поверхность кости с ошибкой подгонки 0,68 мм. Однако было замечено, что основанные на эвристике методы не работают при наличии патологии тазобедренного сустава, особенно у людей, страдающих артритом. В результате впоследствии для сегментации бедренной кости появились другие методы, такие как анализ графов и анатомический атлас. Одним из недостатков таких методов является невозможность с их помощью выполнить морфометрию структур тазобедренного сустава, так как даже точная сегментация головки бедренной кости и вертлужной впадины сама по себе не указывает на наличие недостаточного или избыточного покрытия вертлужной впадины. С другой стороны, морфологию тазобедренного сустава можно автоматически анализировать с помощью статистического моделирования формы, при котором ткани тазобедренного сустава обычно определяются с помощью ячеек, и допустимые деформации таких ячеек, которые фиксируют анатомическую изменчивость нормальных и патологических суставов, изучаются из обучающего набора размеченных изображений. В ряде известных из уровня техники решений статистические модели формы использовались для сегментации бедренной кости, головки бедренной кости, вертлужной впадины, других костей и хрящей. Одно из свойств, присущих статистическим моделям формы, заключается в том, что они пытаются аппроксимировать форму тазобедренного сустава пациента по формам из обучающего набора, что потенциально может усложнить сегментацию тазобедренных суставов с серьезными аномалиями, которых не было в обучающем наборе. Однако эта неспособность фиксировать ранее не известные аномалии, наоборот, стала использоваться для точного определения их присутствия. Несколько исследований продемонстрировали, что ячеистые структуры здорового таза могут быть совмещены с пациентом с деформацией вертлужной впадины для количественной оценки уровня потери костной массы, а затем предложена оптимальная поверхность вертлужной впадины для планирования реконструкции кости для ревизионного тотального эндопротезирования тазобедренного сустава. Несмотря на более точную сегментацию, чем ранее описанные методы, статистические ячеистые структуры все же могут давать сбой в случае непредсказуемых или трудно фиксируемых аномалий.
Известные подходы не предлагают инструмента для быстрой и точной диагностики трехмерных медицинских изображений области таза.
Сущность изобретения
С целью устранения по меньшей мере некоторых из вышеупомянутых недостатков предшествующего уровня техники, настоящее изобретение направлено на повышение эффективности систем, устройств и способов диагностики тазобедренных суставов.
Согласно первому аспекту настоящего изобретения, предложено устройство для диагностики тазобедренных суставов, содержащее:
блок получения изображения, выполненный с возможностью получать трехмерное медицинское изображение, содержащее область таза;
блок поиска ориентиров, выполненный с возможностью, с использованием по меньшей мере одного процессора и памяти, автоматически выявлять на полученном изображении анатомические ориентиры для диагностики тазобедренных суставов и выводить их координаты, причем выявление ориентиров включает в себя:
- генерирование первоначального набора ориентиров-кандидатов на основе случайно выбранных точек на изображении, на основе средних местоположений соответствующих ориентиров, вычисленных по обучающим изображениям, или на основе данных, полученных от первой предварительно обученной нейронной сети, анализирующей полученное изображение;
- итеративное уточнение положения ориентиров в наборе на основе анализа пространственных взаимосвязей между ориентирами в наборе ориентиров-кандидатов с применением моделей обучения с подкреплением на базе обучающего набора изображений, причем анализ пространственных взаимосвязей включает в себя последовательное применение метода графического лассо, второй предварительно обученной нейронной сети и анализа чувствительности Морриса в отношении полученного изображения;
блок диагностики, выполненный с возможностью, с использованием по меньшей мере одного процессора и памяти, вычислять клинические показатели, описывающие состояние здоровья тазобедренного сустава, на основе данных, выводимых блоком поиска ориентиров, и формировать отчет о состоянии здоровья тазобедренных суставов, содержащий по меньшей мере один вычисленный клинический показатель; и
блок передачи отчета, выполненный с возможностью передавать отчет на устройство, запрашивавшее диагностику.
В одном из вариантов осуществления блок диагностики дополнительно выполнен с возможностью сопоставлять вычисленные клинические показатели с допустимыми пределами или диапазонами, делать вывод о наличии или отсутствии патологий тазобедренных суставов на основе сопоставления, и включать упомянутый вывод в отчет.
В одном из вариантов осуществления блок диагностики выполнен с возможностью формировать отчет, если на изображении выявлена патология, причем отчет содержит указание на наличие патологии и соответствующий по меньшей мере один вычисленный клинический показатель, подтверждающий наличие патологии.
В одном из вариантов осуществления область таза на изображении включает в себя полностью обе вертлужные впадины и обе головки бедренных костей, пространство между ними и прилегающие части бедренных костей.
В одном из вариантов осуществления блок поиска ориентиров дополнительно выполнен с возможностью формировать копию входного изображения с нанесенными на него ориентирами.
В одном из вариантов осуществления анатомические ориентиры для диагностики тазобедренных суставов представляют собой опорные точки на изображении, необходимые для вычисления клинических показателей, описывающих состояние здоровья тазобедренного сустава.
В одном из вариантов осуществления клинические показатели включают в себя: латеральный центрально-краевой угол (LCEA), шеечно-диафизарный угол (NSA), угол переднего сектора вертлужной впадины (AASA) и угол заднего сектора вертлужной впадины.
В одном из вариантов осуществления блок диагностики дополнительно выполнен с возможностью включать в отчет копию входного изображения с нанесенными на него ориентирами.
В одном из вариантов осуществления блок передачи отчета дополнительно выполнен с возможностью передавать копию входного изображения с нанесенными на него ориентирами, выявленными блоком поиска ориентиров, на удаленный пользовательский интерфейс;
блок диагностики дополнительно выполнен с возможностью принимать ввод от пользователя, полученный через пользовательский интерфейс, указывающий надлежащие местоположения ориентиров, и вычислять клинические показатели с учетом принятого ввода от пользователя.
В одном из вариантов осуществления блок диагностики выполнен с возможностью определять, что следует осуществлять передачу на пользовательский интерфейс, в случае если разница между по меньшей мере одним из вычисленных клинических показателей и границей соответствующего диапазона показателей, определяющих состояние здоровья тазобедренного сустава, не превышает предварительно заданный порог.
В одном из вариантов осуществления блок диагностики выполнен с возможностью определять, что следует осуществлять передачу на пользовательский интерфейс, на основании того, может ли возможное отклонение, вызванное ошибкой определения положения ориентира, привести к выходу значения соответствующего клинического показателя за пределы того диапазона, в котором находится первоначально вычисленное значение клинического показателя.
В одном из вариантов осуществления блок диагностики выполнен с возможностью определять положение отклоненного ориентира путем выбора случайной точки в пределах области возможного отклонения.
В одном из вариантов осуществления блок диагностики выполнен с возможностью определять точку, соответствующую отклоненному ориентиру, в пределах области возможного отклонения в таком положении, которое обеспечивает максимальное отклонение значения соответствующего клинического показателя в направлении ближайшей границы диапазона этого показателя.
В одном из вариантов осуществления область возможного отклонения задается в виде окружности с радиусом, равным предварительно заданной ошибке определения данного ориентира, или в виде замкнутой кривой, соответствующей предварительно заданному пространственному распределению вероятности отклонения данного ориентира.
В одном из вариантов осуществления блок диагностики выполнен с возможностью вычислять или уточнять радиус отклонения ориентира и/или пространственное распределение вероятности отклонения ориентира путем калибровки системы, причем для калибровки выполняется передача множества изображений на пользовательский интерфейс без определения, следует ли осуществлять их передачу на пользовательский интерфейс.
В одном из вариантов осуществления блок передачи отчета дополнительно выполнен с возможностью передавать копию входного изображения с нанесенными на него ориентирами, выявленными блоком поиска ориентиров, на удаленный пользовательский интерфейс;
блок поиска ориентиров дополнительно выполнен с возможностью принимать от пользовательского интерфейса копию входного изображения с нанесенными на него ориентирами, указанными пользователем, и сохранять его в обучающем наборе.
Согласно второму аспекту настоящего изобретения, предложен способ диагностики тазобедренных суставов, содержащий этапы, на которых:
с использованием блока получения изображения получают трехмерное медицинское изображение, содержащее область таза;
с использованием блока поиска ориентиров автоматически выявляют на полученном изображении анатомические ориентиры для диагностики тазобедренных суставов и выводят их координаты, причем выявление ориентиров включает в себя:
- генерирование первоначального набора ориентиров-кандидатов на основе случайно выбранных точек на изображении, на основе средних местоположений соответствующих ориентиров, вычисленных по обучающим изображениям, или на основе данных, полученных от первой предварительно обученной нейронной сети, анализирующей полученное изображение;
- итеративное уточнение положения ориентиров в наборе на основе анализа пространственных взаимосвязей между ориентирами в наборе ориентиров-кандидатов с применением моделей обучения с подкреплением на базе обучающего набора изображений, причем анализ пространственных взаимосвязей включает в себя последовательное применение метода графического лассо, второй предварительно обученной нейронной сети и анализа чувствительности Морриса в отношении полученного изображения;
с использованием блока диагностики вычисляют клинические показатели, описывающие состояние здоровья тазобедренного сустава, на основе данных, выводимых блоком поиска ориентиров, и формируют отчет о состоянии здоровья тазобедренных суставов, содержащий по меньшей мере один вычисленный клинический показатель; и
с использованием блока передачи отчета передают отчет на устройство, запрашивавшее диагностику.
Технический результат
Настоящее изобретение позволяет повысить эффективность систем и способов диагностики тазобедренных суставов. При этом обеспечивается:
- повышение точности диагностики;
- повышение скорости обработки трехмерных изображений;
- упрощение интерпретации и описания изображений;
- возможность выполнения ранней диагностики заболеваний тазобедренных суставов на стадиях, легко поддающихся лечению;
- освобождение медицинского персонала от рутинных процессов анализа снимков пациентов, не имеющих патологий и симптомов в области таза;
- уменьшение влияния человеческого фактора (внимательность, утомляемость, ответственность).
Эти и другие преимущества настоящего изобретения станут понятны при прочтении нижеследующего подробного описания со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
Фиг. 1 - примеры магнитно-резонансных изображений таза.
Фиг. 2 - примеры анатомических ориентиров для диагностики тазобедренных суставов.
Фиг. 3 – блок-схема системы диагностики тазобедренных суставов.
Фиг. 4 – визуализация процесса, выполняющегося в блоке поиска ориентиров.
Фиг. 5 – блок-схема системы диагностики тазобедренных суставов с внешней коррекцией.
Фиг. 6 – пример диапазонов клинических показателей, определяющих состояние здоровья тазобедренного сустава.
Фиг. 7 – пример отклонения ориентиров.
Следует понимать, что фигуры могут быть представлены схематично и не в масштабе и предназначены, главным образом, для улучшения понимания настоящего изобретения.
Подробное описание
Анатомические ориентиры и клинические показатели
Аномалии тазобедренного сустава на практике обычно диагностируются врачами путем ручного размещения на изображении анатомических опорных точек (ориентиров) и вычисления на их основе анатомических расстояний и углов, характеризующих состояние здоровья тазобедренных суставов. Настоящее изобретение предоставляет способ и систему, которые имитируют этот рабочий процесс диагностики, автоматически определяя анатомические ориентиры на изображениях таза, что обеспечивает упрощение интерпретации и описания изображений, а также позволяет выполнять раннюю диагностику заболеваний тазобедренных суставов на стадиях, легко поддающихся лечению.
Авторами настоящего изобретения была собрана анонимная база данных пациентов с аномалиями таза. Каждый случай пациента состоит из одного или нескольких Т1- (Фиг. 1а), Т2- (Фиг. 1b) и/или PD (по протонной плотности)-взвешенных (Фиг. 1c) МРТ-изображений и соответствующих диагностических заметок. Следует заметить, что примеры МРТ-изображений, приведенные на Фиг. 1, для удобства понимания представляют собой только выбранные двумерные коронарные сечения (срезы) из объемных МРТ-изображений.
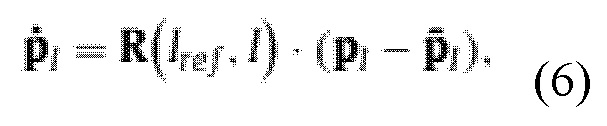
На каждом МРТ-изображении опытный рентгенолог вручную размещал 16 анатомических ориентиров с целью оценки патологии тазобедренного сустава, а именно два ориентира в центрах головок бедренных костей, четыре ориентира на осях обоих бедер, четыре ориентира на обеих осях головки бедренной кости и шейки бедра и шесть ориентиров на боковом, переднем и заднем краях обеих вертлужных впадин. На Фиг. 2 проиллюстрированы все ориентиры (помечены крупными пронумерованными точками) для одного бедра. Ориентиры включают:
1) (Фиг. 2a, 2c) центр головки бедренной кости,
2) (Фиг. 2a) латеральный край вертлужной впадины,
3), 4) (Фиг. 2b) ориентацию диафиза бедренной кости (2 ориентира),
5), 6) (Фиг. 2b) ориентацию шейки бедра (2 ориентира),
7) (Фиг. 2c) передний край вертлужной впадины,
8) (Фиг. 2c) задний край вертлужной впадины.
Эти восемь ориентиров определяются для каждой бедренной кости, в результате всего получается 16 ориентиров. На основе этих ориентиров могут быть рассчитаны четыре наиболее широко используемых клинических показателя, описывающих состояние здоровья тазобедренного сустава:
1) Латеральный центрально-краевой угол (LCEA, угол Виберга): угол между продольной осью тела и линией, соединяющей центр головки бедренной кости с латеральным краем вертлужной впадины (Фиг. 2a). Служит для выявления и количественной оценки импинджмента тазобедренного сустава клещевого типа, дисплазии вертлужной впадины и др.
2) Шеечно-диафизарный угол (NSA): угол между осью бедренной кости и осью головки-шейки бедренной кости (Фиг. 2b). Служит для характеристики развития нижних конечностей и помогает диагностировать различные заболевания.
3) Угол переднего сектора вертлужной впадины (AASA): угол между линией, соединяющей центры головок левой и правой бедренной кости, и передним краем вертлужной впадины (Фиг. 2c). Служит для количественной оценки недостаточного или избыточного покрытия вертлужной впадины.
4) Угол заднего сектора вертлужной впадины (PASA): угол между линией, соединяющей центры головок левой и правой бедренной кости, и задним краем вертлужной впадины (Фиг. 2c). Служит для количественной оценки недостаточного или избыточного покрытия вертлужной впадины.
Настоящее изобретение направлено на получение новой системы и способа, в которых обнаружение ориентиров выполняется автоматически или автоматизированно. Предложенный способ основан на концепции, что анатомические ориентиры имеют попарные и групповые пространственные взаимосвязи, которые можно извлекать и использовать для повышения точности обнаружения ориентиров. Из уровня техники известны системы, в которых для обнаружения ориентиров на 2D (двумерных) изображениях использовались модели поиска взаимосвязей между ориентирами, но в отличие от 2D, в приложении к 3D сложность традиционных моделей поиска пространственных взаимосвязей между ориентирами является препятствием, так как количество ориентиров в 3D может превышать тысячи, когда эти ориентиры, например, охватывают 3D поверхность органов. Тем не менее, настоящее изобретение эффективно преодолевает это препятствие за счет того, что предлагается выполнять обнаружение ориентиров как многоагентную задачу оптимизации, где каждый ориентир рассматривается как интеллектуальный агент для обучения с подкреплением (RL), а окружение агента зависит от взаимосвязей между ориентирами, при этом полученную задачу оптимизации предлагается решать с использованием концепции графического лассо и анализа чувствительности Морриса, чтобы выявить наиболее репрезентативные связи между ориентирами, которые лучше всего описывают целевой объект.
Общее описание системы
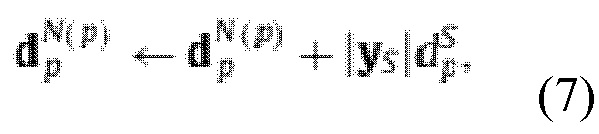
Как изображено на блок-схеме на Фиг. 3, система 300 диагностики патологий таза согласно настоящему изобретению содержит блок 310 получения изображения, блок 330 поиска ориентиров, блок 340 диагностики и блок 350 передачи отчета. Блок 310 получения изображения в одном варианте осуществления может представлять собой сетевую плату или иное средство приема данных. В другом варианте осуществления блок 310 получения изображения может представлять собой непосредственно МРТ-сканер или компьютерный томограф. Блок 330 поиска ориентиров и блок 340 диагностики реализуются на базе устройства обработки, содержащего вычислительный модуль (например, центральный процессор), модуль памяти (например, оперативную память и постоянную память), а также при необходимости дополнительный вычислительный модуль (например, графический процессор или нейронный процессор). Таким образом, блок 330 поиска ориентиров и блок 340 диагностики могут быть реализованы на базе компьютера или сервера. Блок 350 передачи отчета может представлять собой сетевую плату, аппаратный интерфейс передачи данных/видеосигнала или иное средство обмена данными.
Способ диагностики патологий таза выполняется системой диагностики патологий таза и в целом заключается в следующем.
Сначала с помощью блока получения изображения получают трехмерное изображение (МРТ или КТ), содержащее область таза. В частности, требуемая область таза должна содержать полностью обе вертлужные впадины и обе головки бедренных костей, пространство между ними и прилегающие части бедренных костей. В предпочтительном варианте осуществления изображение должно полностью содержать тазовую кость, и при этом вертлужные впадины и головки бедренных костей должны располагаться приблизительно в зоне центральной горизонтальной оси изображения. Тем не менее возможен вариант осуществления, в котором верхняя часть тазовой кости не полностью попадает на изображение – это может несколько снизить точность, но не повлияет принципиальным образом на выполнимость задачи, поскольку верхняя часть тазовой кости не содержит искомые анатомические ориентиры.
Как указывалось выше, в одном варианте осуществления, если блок получения изображения является МРТ или КТ-сканером, он может получать изображение самостоятельно в процессе МРТ или КТ-сканирования. В другом варианте осуществления блок получения изображения, будучи частью сервиса диагностики патологий, может получать извне (например, от медицинской организации, от врача, от региональной системы хранения медицинских данных и т.д.) запрос на диагностику или входные данные, содержащие одно или множество (например, пакет) изображений, и извлекать требуемое изображение из полученных входных данных или запроса.
При необходимости полученное изображение подвергается предварительной обработке в блоке 320 предобработки (не показан на Фиг. 3), чтобы оно было пригодно для обработки дальнейшими блоками. Например, если исходное изображение имеет в каком-либо направлении недостаточное или избыточное разрешение (или число срезов), то может выполняться преобразование или реконструкция изображения до требуемого разрешения. В конкретном неограничивающем примере, если исходное трехмерное изображение имеет 180 пространственных срезов (поперечных сечений) в одном из направлений, а требуется разрешение 256 срезов, то может выполняться преобразование – например, методом аппроксимации с учетом физических размеров данной области. Также могут корректироваться яркость, контрастность и иные параметры изображения.
Затем изображение подается на блок поиска ориентиров, который автоматически выявляет на изображении анатомические ориентиры для диагностики тазобедренных суставов. Более подробно процесс, выполняющийся в блоке поиска ориентиров, будет описан позднее в данном документе. В результате обработки блок поиска ориентиров выдает координаты 16 ориентиров. Также в одном из вариантов осуществления блок поиска ориентиров формирует копию входного изображения с нанесенными на него ориентирами.
Выходные данные от блока поиска ориентиров передаются на блок диагностики, который на их основании автоматически определяет состояние здоровья тазобедренных суставов, вычисляя клинические показатели, описывающие состояние здоровья тазобедренного сустава, а именно: латеральный центрально-краевой угол (LCEA) (Фиг. 2a), шеечно-диафизарный угол (NSA) (Фиг. 2b), угол переднего сектора вертлужной впадины (AASA) (Фиг. 2c) и угол заднего сектора вертлужной впадины (PASA) (Фиг. 2c); и формирует соответствующий отчет. Блок диагностики может сопоставлять вычисленные клинические показатели с допустимыми пределами или диапазонами и делать вывод о наличии или отсутствии патологий тазобедренных суставов.
В одном варианте осуществления отчет о состоянии здоровья тазобедренных суставов может формироваться для каждого изображения. В другом варианте осуществления запрос на диагностику или настройки системы диагностики могут предусматривать необходимость формирования отчета только для случаев, в которых выявлена патология тазобедренных суставов. Например, если в полученном пакете из 10 изображений блок диагностики выявил один случай недопустимого отклонения LCEA от нормы, он может формировать отчет для соответствующего изображения (или пациента), содержащий вычисленные клинические показатели (либо все, либо по меньшей мере тот, который указывает на патологию – в данном случае LCEA) и указание на вероятное наличие импинджмента тазобедренного сустава клещевого типа или дисплазии вертлужной впадины, а для остальных изображений (или пациентов) либо совсем не формировать отчет, либо формировать отчет, указывающий, что патологии на соответствующих изображениях не выявлены. Отчет также может содержать сформированную блоком поиска ориентиров копию входного изображения с нанесенными на него ориентирами.
Далее отчет о состоянии здоровья тазобедренных суставов выводится на экран монитора, подключенного к серверу, или на экран самого МРТ-сканера или компьютерного томографа, или же передается с помощью блока передачи отчета на устройство, запрашивавшее диагностику – например, на расположенное удаленно автоматизированное рабочее место (АРМ) врача. Для упрощения описания в данном документе все эти случаи рассматриваются как передача на устройство, запрашивавшее диагностику.
С помощью изображения с нанесенными на него ориентирами и других данных, содержащихся в отчете (вычисленные клинические показатели, указание на наличие/отсутствие патологии), врач принимает решение о состоянии здоровья тазобедренных суставов (о наличии/отсутствии патологии) и при необходимости принимает решение о лечении пациента.
Поиск ориентиров
Далее процесс, выполняющийся в блоке поиска ориентиров, будет более подробно описан со ссылкой на Фиг. 4.
Предложение ориентиров-кандидатов
Обнаружение ориентиров на основе RL основано на концепции итеративной оптимизации положения ориентиров с использованием информации об интенсивности изображения и, возможно, пространственных взаимосвязей между ориентирами. Итеративная оптимизация требует некоторой инициализации в виде предложений ориентиров-кандидатов. Могут быть использованы разные подходы к созданию предложений-кандидатов.
Первый подход определяет предложения ориентиров-кандидатов как случайные точки, выбранные на изображении. Такая инициализация применима в ситуации, когда исходные предложения ориентиров не предоставляют никакой информации.
Второй подход определяет предложения ориентиров-кандидатов как средние местоположения соответствующих ориентиров, вычисленные по обучающим МР-изображениям. Для такой инициализации оптимизация на основе RL начинается со средней анатомии таза.
Также инициализации могут быть основаны на предложениях-кандидатах, обнаруженных с помощью нейронных сетей – например, таких моделей глубокого обучения, как UNet и пирамидальная сеть признаков (FPN) с сетью предложений областей (RPN). Эти сети могут изучать положение ориентиров на обучающих МР-изображениях, а затем сканировать ранее не обрабатывавшиеся МР-изображения, чтобы определить наиболее вероятные возможные местоположения ориентиров. Ориентиры и координаты предложений ориентиров могут быть нормализованы к диапазону [0,1] относительно соответствующих размеров изображения. После окончательного определения положения ориентиров на тестовом изображении их координаты возвращаются к исходному масштабу.
UNet для предложения ориентира-кандидата
Архитектура UNet была разработана для сегментации изображений и в настоящее время широко используется в медицинской визуализации благодаря своей универсальности и высокоточным результатам сегментации. Она состоит из пути кодера с понижающей дискретизацией, который извлекает признаки изображения в разных масштабах и различной сложности, и пути декодера с повышающей дискретизацией, который генерирует результаты сегментации с использованием извлеченных признаков. Основная концепция UNet состоит в том, чтобы использовать замыкающие соединения (skip connections), которые проходят от кодера к декодеру и идут от ранних уровней пути кодера, где все еще сохраняются мелкие детали изображения, к поздним уровням пути декодера, которые содержат информацию от грубых признаков, необходимую для распознавания и сегментации объектов. Путь энкодера состоит из четырех блоков, каждый из которых состоит из двух сверточных слоев 3 × 3 × 3, за которым следует слой активации ReLU и слой объединения по максимальному значению (max-pooling) 2 × 2 × 2. Путь декодера состоит из четырех блоков, каждый из которых состоит из слоя повышающей дискретизации, слоя свертки транспонирования 2 × 2 × 2 и двух слоев свертки 3 × 3 × 3, за каждым из которых следует слой ReLU.
Чтобы получить предложения ориентиров от UNet, проблема обнаружения ориентиров сначала преобразуется в проблему сегментации. Для каждого изображения l размера l × m × n маска ориентира J размера l × m × n с |P| каналов, где |P| - это количество ориентиров. Для ориентира p ∈ P создается бинарная сфера радиуса r = 10 мм, которая вставляется в p-й канал J в точке p. UNet обучен генерировать маски J для изображений I, используя линейную комбинацию бинарной перекрестной энтропии и функций потерь Dice с весовыми коэффициентами 0,5. Для тестового изображения I предложение-кандидат для ориентира p вычисляется как центр масс наибольшего связанного компонента из p-го канала соответствующего порогового результата J. В конкретном неограничивающем примере UNet может быть обучена с использованием оптимизатора Adam со скоростью обучения 0,0002 и снижением веса 0,0001.
FPN для предложения ориентира-кандидата
Архитектура FPN с RPN основана на принципе эффективного извлечения многомасштабных признаков, что позволяет сочетать семантически устойчивые признаки с низким разрешением и семантически слабые признаки с высоким разрешением. Такой подход является эффективным для задачи обнаружения объектов. Компонент FPN извлекает признаки из входного изображения, и во время этого процесса, он имеет определенное сходство с UNet. В FPN часть кодера представляет собой 3D-ResNet, в конкретном примере предварительно обученную на комбинированных наборах данных «Kinetics-700» и «Moments in Time». Часть декодера создает карты объектов с более высоким разрешением путем повышения дискретизации результатов предыдущих слоев, и каждый блок пути декодера генерирует отдельный вывод для обучения сети. Замыкающие соединения состоят из слоев свертки 1 × 1, применяемых к блокам кодера, которые затем добавляются к соответствующим блокам декодера. В результате FPN стремится генерировать признаки переменного разрешения, которые смогут описать целевой объект. Компонент RPN анализирует выходные данные блока кодера FPN, чтобы оценить, насколько описательными являются функции FPN, и имитирует детектор объектов со скользящим окном, не зависящий от класса, который выполняет бинарную классификацию объект/не-объект и регрессию ограничивающей рамки на картах признаков. Для этой цели RPN применяет набор из множества (например, 15) прямоугольных якорных фильтров к каждому вокселю выходного массива FPN и измеряет вероятность того, что этот воксель соответствует ориентиру из P, используя функции в выходном массиве. Если якорные фильтры вычисляются для вокселя, расположенного в непосредственной близости от истинного ориентира, FPN обучается улучшать этот воксель. Желаемое соседство моделируется путем вычисления отношения площадей ограничивающих рамок (IoU) между фильтрами привязки и предварительно определенной прямоугольной ограничивающей рамкой, охватывающей ориентир, где значения IoU выше 0,7 считаются положительными примерами местоположения ориентира. Выходные данные FPN в разных масштабах затем анализируются RPN для извлечения вокселей, которые с наибольшей вероятностью представляют ориентиры. Координаты этих вокселей преобразуются в вектор, а затем проходят через два полносвязных слоя с 1024 признаками, которые предсказывают координаты каждого ориентира из P, а оптимальные координаты используются в качестве окончательных предложений ориентиров. В конкретном примере FPN может обучаться с использованием оптимизатора Adam со скоростью обучения 0,0002 и снижением веса 0,0001.
Многоагентный RL для корректировки ориентиров
После того, как получены предложения-кандидаты, в настоящем изобретении предлагается итеративно корректировать их, решая задачу многоагентного RL. Чтобы применить методологию RL, оптимизация положения ориентира переформулируется как многоагентный марковский процесс принятия решений, где каждый агент связан с соответствующими ориентирами из P. Пространство состояний Sp, наблюдаемое агентом ориентира p, определяется следующим образом:

где I(p) — участок локального МР-изображения, извлеченный вокруг предполагаемого местоположения p = [xp, yp, zp] для ориентира p, P - вектор предложений координат ориентира, а vp - двоичный вектор, указывающий, какие ориентиры видны p (vp = 1, если все ориентиры видны, и их координаты могут влиять на координаты p; vp содержит хотя бы один ненулевой элемент, так как p всегда может видеть свои собственные координаты при оптимизации положения). Другими словами, агент ориентира p может во время оптимизации своего положения наблюдать свое текущее местоположение p, интенсивность изображения вокруг p и местоположения некоторых других ориентиров из P\p.
На каждом этапе оптимизации участок (патч) изображения I(p) и видимые для p ориентиры vpP сначала анализируются нейронной сетью для создания скрытого представления текущего состояния агента ориентира p. Данный патч изображения проходит через три сверточных слоя с размером фильтра 3 × 3 × 3, за каждым из которых следует слой ReLU. Выход сверточных слоев сглаживается в одномерный вектор  . Вектор
. Вектор  пространственной информации определяется как все ненулевые элементы vpP, т.е. как текущие координаты всех ориентиров, видимых для p. Векторы представляют собой и объединяются в представление текущего состояния wp. Представление wp затем анализируется с помощью модели RL, в качестве которой может использоваться глубокая Q-сеть (DeepQN), градиент глубокой детерминированной политики (DDPG), градиент глубокой детерминированной политики с двойной задержкой (TD3) или градиент политики актер-критик (A2C). Функция вознаграждения R каждой модели RL определяется как взвешенная сумма между качеством текущего шага агента и историей его перемещений:
пространственной информации определяется как все ненулевые элементы vpP, т.е. как текущие координаты всех ориентиров, видимых для p. Векторы представляют собой и объединяются в представление текущего состояния wp. Представление wp затем анализируется с помощью модели RL, в качестве которой может использоваться глубокая Q-сеть (DeepQN), градиент глубокой детерминированной политики (DDPG), градиент глубокой детерминированной политики с двойной задержкой (TD3) или градиент политики актер-критик (A2C). Функция вознаграждения R каждой модели RL определяется как взвешенная сумма между качеством текущего шага агента и историей его перемещений:

где pk - положение ориентира на k-й итерации оптимизации, p* - правильное положение ориентира, а λ - весовой коэффициент для балансировки членов функции R. Первый член функции R вознаграждает агента за приближение к правильному положению ориентира, а второй член вознаграждает агента за то, что он продолжает двигаться в том же направлении и избегает зигзагов.
Функция потерь L представляет собой взвешенную комбинацию между квадратом ошибки расстояния и штрафом за смену направления:

где d - количество шагов, необходимых агенту для перемещения из исходного положения p0 в правильное положение p*. Для DeepQN, DDPG и TD3 агент может перемещаться на определенное расстояние (например, 1 мм) в любом из направлений x, y и z, в то время как для A2C движения агента не ограничены в трехмерном пространстве. Модели RL обучаются улучшать положение ориентиров в P, учитывая расположение друг друга, то есть взаимосвязи между ориентирами.
Соответственно, обнаружение ориентиров на основе RL согласно настоящему изобретению выполняется на новом изображении следующим образом. Для изображения J сначала генерируются первоначальный набор предложений ориентиров-кандидатов P0. Как указывалось выше, эти предложения могут быть определены на основе результатов FPN, UNet или с использованием какого-либо другого подхода. Исходное состояние {J(p0), vpP0} для ориентира p преобразуется в представление состояния wp с использованием сети, описанной выше, и пропускается через соответствующую модель RL для ориентира p для генерации оптимального перемещения, которое должно улучшить текущее предлагаемое местоположение от р0 к р1. После нахождения улучшенных предложений для всех ориентиров набор предложений ориентиров обновляется до P1. Процедура повторяется до тех пор, пока перемещения для всех ориентиров не станут меньше порогового значения δ или пока не будет достигнуто заданное количество итераций.
Разреженный ненаправленный граф соединений
Векторы vp (уравнение 1) предварительно определяются для каждого ориентира p ∈ P перед оптимизацией RL и представляют собой один из наиболее важных компонентов предлагаемой системы. Если vp = 1 (т. е. все ориентиры видны для p), то модели RL могут стать слишком ограничительными и сместить ориентиры в сторону средней морфологии таза. С другой стороны, если vp содержит один-единственный ненулевой элемент (то есть ориентир p «видит» только сам себя), то модели RL будут игнорировать пространственные взаимосвязи между ориентирами. Между тем, необходимо найти оптимальную многоориентирную среду для каждого агента с учетом пространственных взаимосвязей между ориентирами в P. Трехмерные координаты ориентиров для всех M изображений из обучающего набора заполняют матрицу расстояний D размером 3|P| × M. Значения D нормируются в соответствии со значениями каждой координаты ориентира из обучающей выборки. Ковариационная матрица D описывает степень корреляции различных координат ориентиров и, следовательно, оценивает пространственную взаимосвязь между этими ориентирами. Чтобы найти набор наиболее коррелированных ориентиров, предлагается оптимизировать разреженность матрицы точности Θ = Σ-1. Оптимальная матрица точности Θ* может быть найдена путем минимизации L1-регуляризованного отрицательного логарифмического правдоподобия:

где |Θ| - определитель матрицы Θ, S - эмпирическая ковариационная матрица, оцениваемая по D, функция следа tr(·) вычисляет сумму диагональных элементов своего входа, ||Θ||1 - сумма абсолютных значений, а параметр γ управляет разреженностью результирующей оптимальной оценки. Уравнение (4) называется проблемой графического лассо и может быть решено с помощью методов двойственности или внутренней точки. Решение Θ* позволяет выделить среди остальных координат наиболее коррелированных ориентиров в обучающем наборе. После агрегирования значений Θ* с использованием ядра 3ⅹ3 получается разреженная матрица наиболее коррелированных ориентиров.
Нейронные сети для оценки положения ориентира
Чтобы выполнить анализ взаимосвязей между множеством ориентиров, предсказуемость нормализованных координат ориентира с использованием местоположений оставшегося ориентира оценивается путем обучения |P| нейронных сетей. Сеть Fp для ориентира p ∈ P определяется как многослойный перцептрон с четырьмя блоками, где первые три блока состоят из плотных слоев nland нейронов, за которыми следуют уровни пакетной нормализации, активации ReLU и отсева, а последний блок определяется как плотный слой с тремя нейронами, за которым следует слой активации softmax, и предсказывает трехмерные координаты ориентира p. Сеть обучается с помощью функции потерь на основе среднеквадратичной ошибки, дополненной L1-регуляризацией.
Для ориентира p соответствующая сеть Fp обучается на нормированных координатах ориентиров P\p, чтобы предсказать координату для p, используя все выборки из обучающего набора. Когда правдоподобный набор координат xP\p для ориентиров P\p проходит через сеть Fp, он предсказывает координату xp = Fp(xP\p) для ориентира p. Помимо предсказания координат p, сеть Fp может количественно оценить относительное влияние ориентиров P\p на p. Например, если координаты ориентира xP\p изменены на ΔxP\p, то результирующая оценка изменится на xp + Δxp = Fp(xP\p + ΔxP\p). Это приращение Δxp позволяет оценить, как изменения координат ориентиров P\p влияют на координату p, и выявить наиболее пространственно зависимые подгруппы ориентиров.
Анализ пространственных взаимосвязей между множеством ориентиров
Целью этого шага является выявление ориентиров, которые в наибольшей степени вносят вклад в местоположение ориентира p ∈ P. Сначала множество окрестностей N(p) всех потенциально связанных с p ориентиров заполняется индексами ненулевых элементов в p-й строке и столбце Θ*. Чтобы выяснить, как изменения в различных подмножествах ориентиров из N(p) влияют на координаты точки p, задается вектор  суммарных вкладов каждого ориентира из N(p) и инициализируется нулями ( = 0). Для подмножества ориентиров S из N(p) выборочный вектор вклада
суммарных вкладов каждого ориентира из N(p) и инициализируется нулями ( = 0). Для подмножества ориентиров S из N(p) выборочный вектор вклада  вычисляется как:
вычисляется как:
где rand(0, σk) - случайное трехмерное смещение, выбранное из нормального распределения с нулевым средним значением и стандартным отклонением σk, так что значения σ = {σk} определяют степень гибкости смещения ориентира. Другими словами, вектор вклада оценивает, как случайные изменения положения ориентира от S изменяют прогнозируемое положение ориентира p. Чтобы вычислить σ, местоположения ориентиров pI для каждого изображения I нормализуются по отношению к перемещению и повороту:
где  - центр тяжести ориентиров pI для изображения I, а R(Iref, I) - оптимальная матрица поворота, максимально приближающая нормализованные ориентиры (pI − ) для изображения I к нормализованному ориентиру (pIref −
- центр тяжести ориентиров pI для изображения I, а R(Iref, I) - оптимальная матрица поворота, максимально приближающая нормализованные ориентиры (pI − ) для изображения I к нормализованному ориентиру (pIref −  ) для предварительно выбранного случайным образом эталонного изображения Iref. Трехмерное стандартное отклонение σi местоположения ориентира p ∈ P вычисляется из нормализованных местоположений для всех обучающих изображений.
) для предварительно выбранного случайным образом эталонного изображения Iref. Трехмерное стандартное отклонение σi местоположения ориентира p ∈ P вычисляется из нормализованных местоположений для всех обучающих изображений.
Вектор суммарных вкладов увеличивается в соответствии с вкладом выборки :
так что вклад выборки взвешивается в соответствии с абсолютным смещением |yS|. Уравнения (5)–(7) повторяются предварительно заданное число раз для оценки изменения координат точки p при различных случайных смещениях ориентиров из S при сохранении оставшихся координат ориентиров xP\{p,S} неизменными. Такой анализ повторяется для подмножеств ориентиров S разного размера, и полученный вектор оценивает относительный вклад каждого ориентира из окрестности N(p) в координаты точки p. Ориентиры l с наибольшим относительным вкладом определяют ненулевые элементы vp для мультиагентной оптимизации RL (уравнение 1). Следует отметить, что нет необходимости нормализовать вектор , так как выбираются ориентиры с наибольшим вкладом, и каждый ориентир из N(p) участвует одинаковое количество раз в формировании . Алгоритм, описанный в этом подразделе, расширяет концепции анализа чувствительности Морриса до оценки пространственной взаимосвязи множества ориентиров.
Таким образом, обеспечивается повышенная точность определения ориентиров в блоке поиска ориентиров.
Внешняя коррекция
В одном из вариантов осуществления может выполняться внешняя коррекция результатов работы системы. Пример системы 500 диагностики тазобедренных суставов с внешней коррекцией показан на Фиг. 5. Блоки 510-550 в системе 500 аналогичны блокам 310-350 в системе 300, которые описаны выше, поэтому не будут описываться здесь повторно.
Основное отличие системы 500 от системы 300 состоит в том, что отчет о состоянии здоровья тазобедренных суставов от блока 550 передачи отчета может предоставляться врачу через пользовательский интерфейс 560. Пользовательский интерфейс может быть реализован в виде клиента, установленного на оборудовании врача (АРМ, компьютере, ноутбуке, планшете, смартфоне и т.д.), или в виде удаленного подключения к сервису диагностики (например, через браузер). Сервис диагностики представляет собой один или более процессоров, компьютеров или серверов, содержащих в совокупности блоки 510-550, и предоставляет услугу или выполняет функцию диагностики патологий на предоставляемых ему медицинских изображениях. Сервис диагностики в данном документе может также называться устройством диагностики.
Пользовательский интерфейс 560 может предоставлять трехмерное изображение на плоском экране или виртуальное трехмерное изображение в рамках виртуальной, дополненной, смешанной реальности (VR, AR, MR) и т.д. Рендеринг изображения может производиться как полностью на стороне пользователя, так и полностью или частично на стороне сервиса диагностики. Врач может визуально проверить корректность определения анатомических ориентиров и через пользовательский интерфейс указать надлежащие местоположения ориентиров (с помощью мыши, сенсорного ввода, VR-манипулятора, клавиатуры и т.д.). Следует понимать, что врач, выполняющий внешнюю коррекцию через пользовательский интерфейс 560, не обязательно является тем врачом, для которого предназначен конечный результат работы системы – например, внешнюю коррекцию может выполнять привлеченный специально для этой цели специалист, в то время как сервис диагностики может предоставлять услугу по диагностике патологий для других врачей и организаций.
Коррекция в данном документе рассматривается в качестве внешней по отношению к блоку 530 поиска ориентиров, то есть к блоку, который сначала автоматически определяет положение анатомических ориентиров.
Данные о скорректированном местоположении анатомических ориентиров (и при необходимости сформированное в результате в пользовательском интерфейсе изображение с нанесенными на него скорректированными ориентирами) передаются из пользовательского интерфейса 560 на блок 540 диагностики, который выполняет на их основе коррекцию клинических показателей и соответствующим образом корректирует отчет.
Скорректированный отчет о состоянии здоровья тазобедренных суставов выводится на экран монитора, подключенного к серверу, или на экран самого МРТ-сканера или компьютерного томографа, или же передается с помощью блока передачи отчета на устройство, запрашивавшее диагностику.
Таким образом, обеспечивается повышение точности диагностики тазобедренных суставов за счет проверки и коррекции полученных данных специалистом.
В одном из вариантов осуществления также возможна передача врачу в пользовательский интерфейс 560 не отчета о состоянии здоровья, подготовленного блоком 540 диагностики, а непосредственно изображения с нанесенными на него ориентирами, сформированного блоком 530 поиска ориентиров, то есть минуя блок 540 диагностики (показано пунктиром на Фиг. 5). Это позволяет несколько сократить время на предоставление изображения врачу. Вместе с тем врач может испытывать неудобство, не имея перед глазами дополнительные данные о клинических показателях, формируемые блоком 540 диагностики. Как будет показано далее, такой подход может быть полезен на этапе начальной настройки системы при ее вводе в эксплуатацию.
В одном из вариантов осуществления на проверку могут направляться только случаи, в которых по меньшей мере один из вычисленных клинических показателей (LCEA, NSA, AASA и PASA) близок к границам диапазонов, определяющих состояние здоровья тазобедренного сустава. Например, как показано на Фиг. 6, для угла LCEA нормальным показателем здоровья тазобедренного сустава для взрослого человека может являться диапазон от 25 до 39 градусов, диапазон от 20 до 25 градусов может указывать на пограничную дисплазию, диапазон от 20 градусов и менее может указывать на дисплазию, и диапазон от 39 градусов и более может указывать на импиджмент. В данном случае границами диапазонов являются значения угла LCEA 20, 25 и 39 градусов. Если вычисленный клинический показатель близок к границе диапазона (например, разница между вычисленным клиническим показателем и границей диапазона не превышает предварительно заданный порог в 0,5 градуса), то такой случай можно рассматривать как требующий согласования с врачом, и соответствующее изображение направляется на проверку в пользовательский интерфейс 560. Порог близости к той или иной границе диапазона может быть различным и зависит от требований конкретного применения. Таким образом, учитывая приведенную выше статистику по бессимптомным больным и здоровым пациентам, а также то, что доля пациентов, у которых вычисленные клинические показатели близки к границе диапазона, мала относительно общего числа пациентов, большинство снимков в данном варианте осуществления будут сразу отправляться на устройство, запрашивавшее диагностику, поскольку они не нуждаются в согласовании, и лишь часть будет отправляться на проверку к внешнему специалисту. Тем самым, обеспечивается одновременное повышение точности диагностики, повышение автоматизации обработки и снижение нагрузки на внешнего специалиста.
В одном из вариантов осуществления блок 540 диагностики может определять, следует ли отправить полученный результат на проверку к внешнему специалисту, на основании того, имеется ли неопределенность результата диагностики с учетом возможной ошибки определения положения ориентиров. Для этого блок 540 диагностики помимо вычисления клинических показателей на основе данных о положении анатомических ориентиров, полученных от блока 530 поиска ориентиров, также определяет возможные значения клинических показателей при отклонении ориентиров. Величина возможного отклонения ориентиров определяется ошибкой их определения (средней, среднеквадратической и т.д.) и задается заранее настройками производителя, организации, выполняющей установку системы, или настройками самого медицинского учреждения или врача, пользующегося системой 500 диагностики тазобедренных суставов. Вокруг каждого ориентира строится окружность с радиусом, равным величине возможного отклонения данного ориентира, которая определяет область возможного отклонения. В рамках каждой такой области в качестве возможного отклоненного ориентира выбирается точка, отличная от центра области. Далее на основе положений отклоненных ориентиров вычисляется соответствующее возможное значение клинического показателя при отклонении.
В одном варианте осуществления в каждой области возможного отклонения случайным образом выбирается одна точка, соответствующая отклоненному ориентиру. Полученное в результате возможное значение клинического показателя при отклонении сопоставляется с границами диапазонов данного клинического показателя, и если вычисленное возможное значение клинического показателя при отклонении находится в пределах того же диапазона клинического показателя, что и первоначально вычисленное значение клинического показателя (без отклонения ориентира), то есть оба показателя окажутся по одну сторону от границы диапазона, то это указывает на то, что внешняя коррекция может оказаться нецелесообразной, поскольку даже в случае коррекции предполагаемый диагноз может не измениться. В конкретном неограничивающем примере, блок 540 диагностики может первоначально вычислить значение клинического показателя, равное 25,4 градуса, а затем на основании случайного отклонения ориентира вычислить возможное значение клинического показателя при отклонении, равное 25,2 градуса – в таком случае оба вычисленных показателя окажутся в диапазоне от 25 до 39 градусов, с одной стороны от границы 25 градусов, а значит диагноз даже при отклонении ориентира останется прежним: в пределах нормы. Соответственно, такой случай не отправляется на внешнюю коррекцию. Если же вычисленное возможное значение клинического показателя при отклонении находится в пределах другого диапазона клинического показателя по сравнению с тем, в котором находится первоначально вычисленное значение клинического показателя (без отклонения ориентира), то есть показатели окажутся по разные стороны от границы диапазона, то это указывает на то, что имеется неопределенность в результате диагностики, и внешняя коррекция может существенно повлиять на предполагаемый диагноз. Соответственно, такой случай отправляется на внешнюю коррекцию. Таким образом, система самостоятельно уточняет целесообразность коррекции даже вблизи границ диапазонов, что обеспечивает дополнительное повышение автоматизации обработки и снижение нагрузки на внешнего специалиста при поддержании высокой точности диагностики.
В другом варианте осуществления точка, соответствующая отклоненному ориентиру, выбирается не случайным образом, а в таком положении, которое обеспечивает максимальное отклонение значения соответствующего клинического показателя в направлении ближайшей границы диапазона. В конкретном неограничивающем примере, блок 540 диагностики может первоначально вычислить значение клинического показателя, равное 25,4 градуса. Разность между этим значением и границей диапазона составляет 0,4 градуса и не превышает предварительно заданный порог в 0,6 градусов, то есть может потребоваться уточнение положения ориентира. Ближайшая граница диапазона находится на уровне 25 градусов, соответственно, для изменения клинического показателя в направлении этой границы необходимо, чтобы клинический показатель при отклонении был меньше вычисленного.
На Фиг. 7 показан один из способов отклонения ориентиров для уменьшения угла LCEA. Точки 1 и 2 – это ориентиры, определенные блоком 530 поиска ориентиров. Жирными линиями показаны стороны угла LCEA, построенного на базе точек 1 и 2 – а именно, продольная ось тела и линия, соединяющая центр головки бедренной кости с латеральным краем вертлужной впадины. Окружности вокруг точек 1 и 2 задают области возможного отклонения ориентиров. Точка 1* - это отклоненный ориентир, полученный на пересечении границы области возможного отклонения ориентира 1 и нормали к продольной оси тела, проведенной от ориентира 1 в направлении к точке 2. Точка 2* - это отклоненный ориентир, полученный на пересечении границы области возможного отклонения ориентира 2 и нормали, проведенной от ориентира 2 в направлении касательной окружности вокруг точки 2, построенной от точки 1*. Направления отклонения ориентиров показаны на Фиг. 7 стрелками, а новая продольная ось тела и линия, соединяющая центр головки бедренной кости с латеральным краем вертлужной впадины, показаны пунктирными линиями.
Если возможное значение клинического показателя при отклонении (LCEA* в примере на Фиг. 7) находится в пределах другого диапазона клинического показателя по сравнению с тем, в котором находится первоначально вычисленное значение клинического показателя (LCEA в примере на Фиг. 7, без отклонения ориентира), то есть показатели окажутся по разные стороны от границы диапазона (например, LCEA* составит 24,8 градуса, тогда как LCEA равен 25,4 градуса), то это указывает на то, что внешняя коррекция может существенно повлиять на предполагаемый диагноз. Соответственно, такой случай отправляется на внешнюю коррекцию. Если же вычисленное возможное значение клинического показателя при отклонении находится в пределах того же диапазона клинического показателя, что и первоначально вычисленное значение клинического показателя (например, LCEA* составит 25,1 градуса, тогда как LCEA равен 25,4 градуса), то есть оба показателя окажутся по одну сторону от границы диапазона, то это указывает на то, что внешняя коррекция может оказаться нецелесообразной, и такой случай не отправляется на внешнюю коррекцию. Таким образом, при проверке целесообразности внешней коррекции система учитывает наихудший сценарий, что позволяет избежать ошибок, которые могли бы возникнуть при отсутствии внешней коррекции, что обеспечивает дополнительное повышение точности диагностики при поддержании высокой автоматизации обработки и освобождение внешнего специалиста от рутинных процессов коррекции, не влияющих на диагноз.
В некоторых вариантах осуществления выбор возможного отклоненного ориентира может осуществляться с учетом заранее известного распределения вероятности отклонения данного ориентира. Для этого граница области возможного отклонения вокруг ориентира может соответствовать предварительно заданному пороговому значению вероятности отклонения – соответственно, в общем случае она может представлять собой произвольную замкнутую кривую, отличную от окружности. Поиск максимального отклонения значения клинического показателя может выполняться именно с применением этой границы. Также в рамках этой границы может выполняться случайный выбор отклоненного ориентира – на основе равномерного распределения или на основе упомянутого заранее известного распределения вероятности отклонения. Таким образом, устраняются наименее вероятные отклонения, которые могли бы ошибочно привести к отправке данных к внешнему специалисту, то есть дополнительно повышается точность принятия решения о целесообразности внешней коррекции, что обеспечивает дополнительное повышение автоматизации обработки и снижение нагрузки на внешнего специалиста при поддержании высокой точности диагностики.
В одном варианте осуществления радиус окружности, которая определяет область возможного отклонения ориентира, и/или пространственное распределение вероятности отклонения ориентира могут быть предварительно заданы настройками производителя, организации, выполняющей установку системы, или настройками самого медицинского учреждения или врача, пользующегося системой 500 диагностики тазобедренных суставов. В конкретном неограничивающем примере источником данных для установки настроек могут быть исследования, результаты опытной эксплуатации, собственные знания специалистов и т.д. Это позволяет ускорить процесс ввода системы в эксплуатацию.
В другом варианте осуществления радиус отклонения ориентира и/или пространственное распределение вероятности отклонения ориентира могут вычисляться или уточняться путем калибровки непосредственно в процессе использования конкретного экземпляра системы. Для этого блок 540 диагностики не выполняет проверку на необходимость внешней коррекции, и каждое изображение отправляется на коррекцию к внешнему специалисту. Получив через пользовательский интерфейс 560 от внешнего специалиста скорректированные данные для множества изображений, блок 540 диагностики может вычислить ошибку определения ориентира (среднюю, среднеквадратическую и т.д.) и/или пространственное распределение вероятности отклонения ориентира. Точное количество изображений, требующихся для калибровки, определяется требованиями конкретного применения. Таким образом, обеспечивается повышение точности определения ориентиров, так как медицинская организация, использующая предложенную систему 500, может специализироваться на лечении пациентов определенной половой или возрастной категории, пациентов, имеющих определенные заболевания, может иметь оборудование, выдающее медицинские изображения, обладающие определенной спецификой, и т.д., и этой организации могут не подходить стандартные заводские настройки системы, тогда как калибровка позволяет максимально адаптировать систему под особенности применения.
Калибровка может проводиться на этапе начальной настройки системы при ее вводе в эксплуатацию или при необходимости уже в процессе эксплуатации. Во время калибровки, так как все изображения отправляются на внешнюю коррекцию, может применяться упоминавшийся выше подход с отправкой изображений врачу в пользовательский интерфейс 560 сразу от блока 530 поиска ориентиров, то есть минуя блок 540 диагностики (показано пунктиром на Фиг. 5). Это позволяет не только сократить время на предоставление изображения врачу, но и избежать непроизводительных затрат вычислительных ресурсов и времени на промежуточную обработку данных блоком 540 диагностики.
Калибровка может производиться с учетом данных или настроек, которые уже имеются в системе. При этом предварительные настройки могут учитываться с определенным весом. В конкретном неограничивающем примере для вычисления ошибки определения ориентира предварительная настройка может иметь вес 0,7, а новые данные об отклонении ориентиров, получаемые в результате внешней коррекции, могут учитываться с весом 0,01, что позволит регулировать степень влияния отдельно взятых случаев на общий результат и избежать переобучения системы в соответствии с тем множеством изображений, которое использовалось для калибровки. Точные значения весов зависят от требований конкретного применения. Кроме того, во избежание переобучения может быть предварительно установлен порог минимальной ошибки определения ориентира, чтобы система не подстраивалась чрезмерно сильно под множество изображений, которое использовалось для калибровки.
В одном из вариантов осуществления изображение с нанесенными на него скорректированными ориентирами, сформированное в пользовательском интерфейсе в результате внешней коррекции, передается из пользовательского интерфейса 560 на блок 530 поиска ориентиров, который сохраняет это изображение в обучающем наборе. Таким образом, обеспечивается регулярное пополнение обучающего набора, что позволяет повысить точность определения положения ориентиров блоком 530 поиска ориентиров. Более того, при сочетании с вышеупомянутой обработкой, выполняемой в блоке 540 диагностики, это позволяет достичь синергетического эффекта, когда уменьшение ошибки в блоке 530 поиска ориентиров позволяет еще больше снизить ошибку в работе блока 540 диагностики, что обеспечивает дополнительное повышение автоматизации обработки и снижение нагрузки на внешнего специалиста.
Следует понимать, что стрелки от пользовательского интерфейса на Фиг. 5 показаны для упрощения понимания того, какой именно блок может быть получателем данных от пользовательского интерфейса, и ввод от пользователя, полученный через пользовательский интерфейс 560, может быть отправлен к блоку 530 поиска ориентиров или блоку 540 диагностики не напрямую, а через средство приема данных, такое как блок 510 получения изображения.
Пример осуществления
Предложенная система была проверена на базе данных 260 пациентов, содержащей 337 МРТ-изображений (в частности, 115 Т1-, 109 Т2- и 113 PD-взвешенных изображений), где 180 пациентов / 251 изображение (78 Т1, 92 Т2 и 81 PD) использовались для обучения, а 80 пациентов / 86 изображений (37 T1, 17 T2 и 32 PD) использовались для тестирования. Изображения коронально реконструировались до изотропного разрешения с размером коронального среза от 320 х 320 мм2 до 370 х 370 мм2 и количеством поперечных сечений от 58 до 180.
Возраст пациентов колебался от 5 до 86 лет со средним значением 56 лет, 63% пациентов были женщинами. Статистические данные по полу и возрасту согласуются с клиническими данными о том, что заболевания органов малого таза чаще встречаются у женщин. Все больные страдали той или иной патологией таза с истончением хряща, наиболее частым диагнозом был лево- и правосторонний коксартроз. Также у некоторых пациентов имелись другие аномалии, в том числе патологии, не связанные непосредственно с тазобедренным суставом, и заболевания, специфичные для женщин.
Параметры отдельных компонентов системы определялись следующим образом. В моделях RL для оптимизации местоположения ориентиров (DeepQN, DDPG, TD3 и A2C) использовались фрагменты I(p) (патчи) 3D МР-изображений размером 10 мм3, чтобы охватывать внешние границы местоположения ориентиров, а функции потерь имели штраф за ориентацию, взвешенный с λ = 0,3, с учетом среднеквадратичной ошибки. Оптимизация положения ориентира на основе RL продолжается, если есть хотя бы один кандидат на ориентир, который перемещается более чем на δ = 0,1 мм от своего местоположения в предыдущей итерации. Алгоритм графического лассо был оптимизирован для 100 итераций с параметром регуляризации γ = 0,01, который контролирует разреженность результатов, и был решен с использованием пакета scikit-learn на базе python.
Нейронные сети для анализа взаимосвязей между множеством ориентиров имели, соответственно, nland = 48, 32 и 16 признаков для первых трех сетевых блоков. Максимальное количество ориентиров k = 3 определяло случайную комбинацию ориентиров для проверки их совместного влияния на ориентир p ∈ P, и для каждой комбинации генерировалось 1000 случайных перемещений.
Скорость обучения для моделей RL и сети определения формы на основе ориентиров была выбрана равной 0,001. Оптимизация RL прекращалась после 50 итераций, если коррекция положения ориентира не сошлась. Фреймворк был обучен на сервере, оснащенном графическим процессором (GPU) Tesla V100-SXM2-16 ГБ, 80-ядерным центральным процессором (CPU) Intel(R) Xeon(R) E5-2698 v4 @ 2,20 ГГц, оперативной памятью (RAM) 503 ГБ.
Эффективность системы оценивалась путем оценки точности определения ориентиров, расчета анатомического угла, а также обнаружения и количественного определения аномалий тазобедренного сустава. При сочетании предложений ориентиров на основе FPN и предложенной моделью формы результирующая точность составила 81%, 100%, 99% и 100% для LCEA, NSA, AASA и PASA, соответственно. Полученные результаты были сопоставлены с другими системами и с человеческими оценками и было выявлено, что предложенная система может успешно количественно определять морфологические аномалии тазобедренного сустава, демонстрируя почти по всем показателям повышенную точность и скорость диагностики. При наличии механизма внешней коррекции удается дополнительно повысить точность диагностики, при этом помощь внешнего специалиста требуется только в случаях, когда существует вероятность неверной автоматической постановки диагноза.
Применение
Системы, устройства и способы согласно настоящему изобретению можно использовать для обработки диагностических медицинских изображений, содержащих область таза, с целью выявления в них признаков патологий тазобедренных суставов.
Дополнительные особенности реализации
Несмотря на то, что в данном документе может быть указано, что данные передаются/отправляются или принимаются/получаются человеком (например, медицинским специалистом, врачом, экспертом), специалист в данной области техники должен понимать, что такое указание используется исключительно в целях упрощения описания, тогда как на самом деле подразумевается, что данные передаются/отправляются или принимаются/получаются соответствующим устройством, которым пользуется и/или управляет этот человек.
Один или более описанных в настоящем документе блоков или устройств передачи (передатчиков) и один или более блоков или устройств приема (приемников) физически могут быть реализованы в одном и том же блоке или устройстве приемопередачи или в разных блоках или устройствах.
Устройством или блоком передачи в данном документе для упрощения описания может называться устройство или блок, имеющий функции не только передачи, но и приема данных, информации и/или сигналов. Аналогичным образом, устройство или блок приема может также заключать в себе функции передачи данных, информации и/или сигналов.
Различные иллюстративные блоки и модули, описанные в связи с раскрытием сущности в данном документе, могут реализовываться или выполняться с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства (PLD), дискретного логического элемента или транзисторной логики, дискретных аппаратных компонентов либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессор общего назначения может представлять собой микропроцессор, но в альтернативном варианте, процессор может представлять собой любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может реализовываться как комбинация вычислительных устройств (к примеру, комбинация DSP и микропроцессора, несколько микропроцессоров, один или более микропроцессоров вместе с DSP-ядром либо любая другая подобная конфигурация).
Некоторые блоки по отдельности или вместе могут представлять собой, например, компьютер, и включать в себя процессор, который сконфигурирован для вызова и выполнения компьютерных программ из памяти для выполнения этапов способа или функций блоков в соответствии с вариантами осуществления настоящего изобретения. Согласно вариантам осуществления, устройство может дополнительно включать в себя память. Процессор может вызывать и выполнять компьютерные программы из памяти для выполнения способа. Память может быть отдельным устройством, независимым от процессора, или может быть интегрирована в процессор. Память может хранить код, инструкции, команды и/или данные для исполнения на наборе из одного или более процессоров описанного устройства. Коды, инструкции, команды могут предписывать процессору выполнять этапы способа или функции устройства.
Функции, описанные в данном документе, могут реализовываться в аппаратном обеспечении, программном обеспечении, выполняемом посредством одного или более процессоров, микропрограммном обеспечении или в любой комбинации вышеозначенного. Аппаратные и программные средства, реализующие функции, также могут физически находиться в различных позициях, в том числе согласно такому распределению, что части функций реализуются в различных физических местоположениях, то есть может выполняться распределенная обработка или распределенные вычисления.
При необходимости (например, в случае если велик объем данных и/или вычислений, которые необходимо выполнить в отношении этих данных), может производиться многопоточная обработка данных, которая в простом представлении может выражаться в том, что все множество подлежащих обработке данных разделяется на набор подмножеств, и каждое ядро процессора выполняет обработку в отношении назначенного для него подмножества данных.
Вышеупомянутая память может быть энергозависимой или энергонезависимой памятью или может включать в себя как энергозависимую, так и энергонезависимую память. Специалисту в области техники должно быть также понятно, что, когда речь идет о памяти и о хранении данных, программ, кодов, инструкций, команд и т.п., подразумевается наличие машиночитаемого (или компьютерно-читаемого, процессорно-читаемого) запоминающего носителя. Машиночитаемые носители данных включают в себя как некратковременные компьютерные носители хранения данных, так и среду связи, включающую в себя любую передающую среду, которая упрощает перемещение компьютерной программы или ее части из одного места в другое. Некратковременный машиночитаемый запоминающий носитель может представлять собой любой доступный носитель, который может использоваться для того, чтобы переносить или сохранять требуемое средство программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера, процессора или иного устройства обработки общего назначения или специального назначения.
В качестве примера, а не ограничения, машиночитаемые носители могут содержать постоянное запоминающее устройство (ROM), программируемое постоянное запоминающее устройство (PROM), стираемое программируемое постоянное запоминающее устройство (EPROM), электронно-стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память, оперативную память (RAM), статическую память с произвольным доступом (SRAM), динамическую память с произвольным доступом (DRAM), синхронную динамическую память с произвольным доступом (SDRAM), синхронную динамическую память с произвольной выборкой с двойной скоростью передачи данных (DDR SDRAM), синхронную динамическую память с произвольной выборкой с повышенной скоростью (ESDRAM), DRAM с синхронной линией связи (SLDRAM) и оперативную память с шиной прямого доступа (DR RAM), регистр, кэш-память, полупроводниковые запоминающие устройства, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD), а также любые другие известные в уровне техники носители данных.
Информация и сигналы, описанные в данном документе, могут представляться с помощью любой из множества различных технологий. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, которые могут приводиться в качестве примера в вышеприведенном описании, могут представляться посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц либо любой комбинации вышеозначенного, если это применимо к настоящему изобретению.
По меньшей мере один из этапов в способе или блоков в устройстве может использовать модель искусственного интеллекта (AI) для выполнения соответствующих операций. Функция, связанная с AI, может выполняться через процессор и энергонезависимую и/или энергозависимую память.
Процессор может включать в себя один или более процессоров. В то же время, один или более процессоров могут быть процессором общего назначения, например центральным процессором (CPU), прикладным процессором (AP) и т.п., блоком обработки только графики, таким как графический процессор (GPU), визуальный процессор (VPU), и/или специализированным процессором AI, таким как нейронный процессор (NPU).
Один или более процессоров управляют обработкой входных данных в соответствии с предварительно определенным правилом работы или моделью искусственного интеллекта (AI), хранящейся в энергонезависимой памяти и/или энергозависимой памяти. Предварительно определенное правило работы или модель искусственного интеллекта могут быть получены путем обучения. При этом процессор может выполнять операцию предварительной обработки данных для преобразования в форму, подходящую для использования в качестве входных данных для модели искусственного интеллекта.
«Получены путем обучения» означает, что посредством применения алгоритма обучения к обучаемой модели искусственного интеллекта с использованием множества обучающих данных создается предварительно определенное правило работы или модель AI с желаемой характеристикой. Обучение может выполняться на самом устройстве, в котором выполняется AI согласно варианту осуществления, и/или может быть реализовано через отдельный сервер/систему.
Модель искусственного интеллекта может включать в себя множество слоев нейронной сети. Каждый из множества слоев нейронной сети включает в себя множество весовых значений (коэффициентов) и выполняет рабочую операцию для данного слоя путем вычисления с применением множества весовых значений данного слоя в отношении входных данных или результата вычисления предыдущего слоя.
Примеры нейронных сетей включают, помимо прочего, сверточную нейронную сеть (CNN), глубокую нейронную сеть (DNN), рекуррентную нейронную сеть (RNN), ограниченную машину Больцмана (RBM), глубокую сеть доверия (DBN), двунаправленную рекуррентную глубокую нейронную сеть (BRDNN), генеративно-состязательные сети (GAN) и глубокие Q-сети.
Алгоритм обучения - это метод обучения предварительно определенного целевого устройства (например, нейронной сети на базе GPU или NPU) с использованием множества обучающих данных, чтобы вызывать, разрешать или управлять целевым устройством для выполнения определения или прогнозирования. Примеры алгоритмов обучения включают, но не ограничиваются ими, обучение с учителем, обучение без учителя, обучение с частичным привлечением учителя или обучение с подкреплением.
Следует понимать, что хотя в настоящем документе для описания различных блоков, модулей, сетей, элементов, компонентов, областей, слоев и/или секций, могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти блоки, модули, сети, элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один блок, модуль, сеть, элемент, компонент, область, слой или секцию от другого блока, модуля, сети, элемента, компонента, области, слоя или секции. Так, первый блок, модуль, сеть, элемент, компонент, область, слой или секция может быть назван вторым блоком, модулем, сетью, элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего изобретения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле изобретения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле изобретения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
В одном из вариантов осуществления некоторые или все элементы/блоки/модули предложенного устройства находятся в общем корпусе, могут быть размещены на одной раме/конструкции/печатной плате/кристалле и связаны друг с другом конструктивно посредством монтажных (сборочных) операций и функционально посредством линий связи. Упомянутые линии или каналы связи, если не указано иное, являются типовыми, известными специалистам линиями связи, материальная реализация которых не требует творческих усилий. Линией связи может быть провод, набор проводов, шина, дорожка, беспроводная линия связи (индуктивная, радиочастотная, инфракрасная, ультразвуковая и т.д.). Протоколы связи по линиям связи известны специалистам и не раскрываются отдельно.
Под функциональной связью элементов следует понимать связь, обеспечивающую корректное взаимодействие этих элементов друг с другом и реализацию той или иной функциональности элементов. Частными примерами функциональной связи может быть связь с возможностью обмена информацией, связь с возможностью передачи электрического тока, связь с возможностью передачи механического движения, связь с возможностью передачи света, звука, электромагнитных или механических колебаний и т.д. Конкретный вид функциональной связи определяется характером взаимодействия упомянутых элементов, и, если не указано иное, обеспечивается широко известными средствами, используя широко известные в технике принципы.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДИАГНОСТИКИ ТАЗОБЕДРЕННЫХ СУСТАВОВ | 2022 |
|
RU2801420C1 |
| СПОСОБ РЕНТГЕНОЛОГИЧЕСКОГО ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ ИЗМЕНЕНИЙ ДЛИНЫ КОНЕЧНОСТИ НА УРОВНЕ ТАЗОБЕДРЕННОГО СУСТАВА | 2012 |
|
RU2500351C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАТОЛОГИИ ТАЗОБЕДРЕННОГО СУСТАВА У ДЕТЕЙ 1-5 ЛЕТ | 2006 |
|
RU2313284C1 |
| СПОСОБ ПРЕДОПЕРАЦИОННОЙ ИНВАЗИВНОЙ ЛУЧЕВОЙ ДИАГНОСТИКИ ПАТОЛОГИЧЕСКИХ ИЗМЕНЕНИЙ В ТАЗОБЕДРЕННОМ СУСТАВЕ ПРИ ВРОЖДЕННОМ ВЫВИХЕ БЕДРА У ДЕТЕЙ ДЛЯ ПОСЛЕДУЮЩЕГО ВЫБОРА МЕТОДА ЛЕЧЕНИЯ ЭТИХ ПАТОЛОГИЧЕСКИХ ИЗМЕНЕНИЙ | 2010 |
|
RU2480157C2 |
| Система и способ диагностики синуситов по рентгеновским изображениям | 2023 |
|
RU2828554C1 |
| Система и способ диагностики патологий придаточных пазух носа по рентгеновским изображениям | 2023 |
|
RU2825958C1 |
| Система и способ определения патологий придаточных пазух носа по рентгеновским изображениям | 2023 |
|
RU2825519C1 |
| СИСТЕМА И СПОСОБ ДИАГНОСТИКИ ПАТОЛОГИЙ ЛЕГКИХ ПО РЕНТГЕНОВСКИМ ИЗОБРАЖЕНИЯМ | 2023 |
|
RU2840011C1 |
| Способ дооперационного компьютерного инверсионного моделирования ацетабулярного компонента при диспластическом коксартрозе | 2019 |
|
RU2700472C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПАТОЛОГИЙ ЛЕГКИХ ПО РЕНТГЕНОВСКИМ ИЗОБРАЖЕНИЯМ | 2023 |
|
RU2840009C1 |
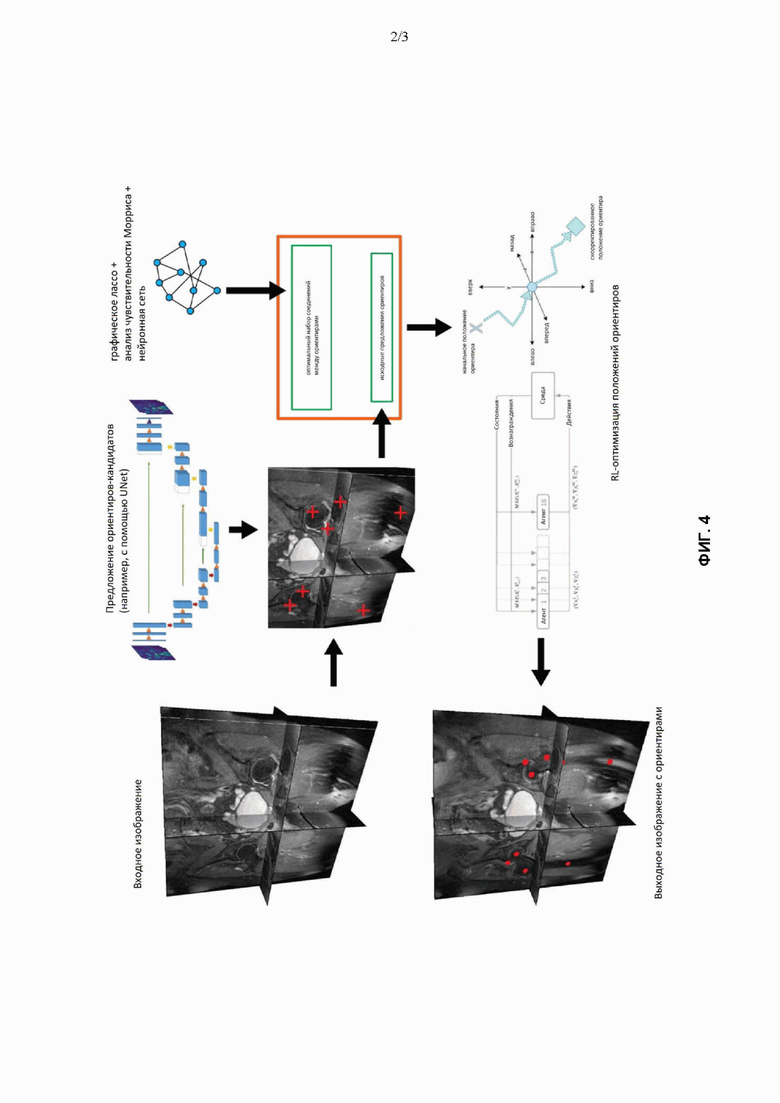
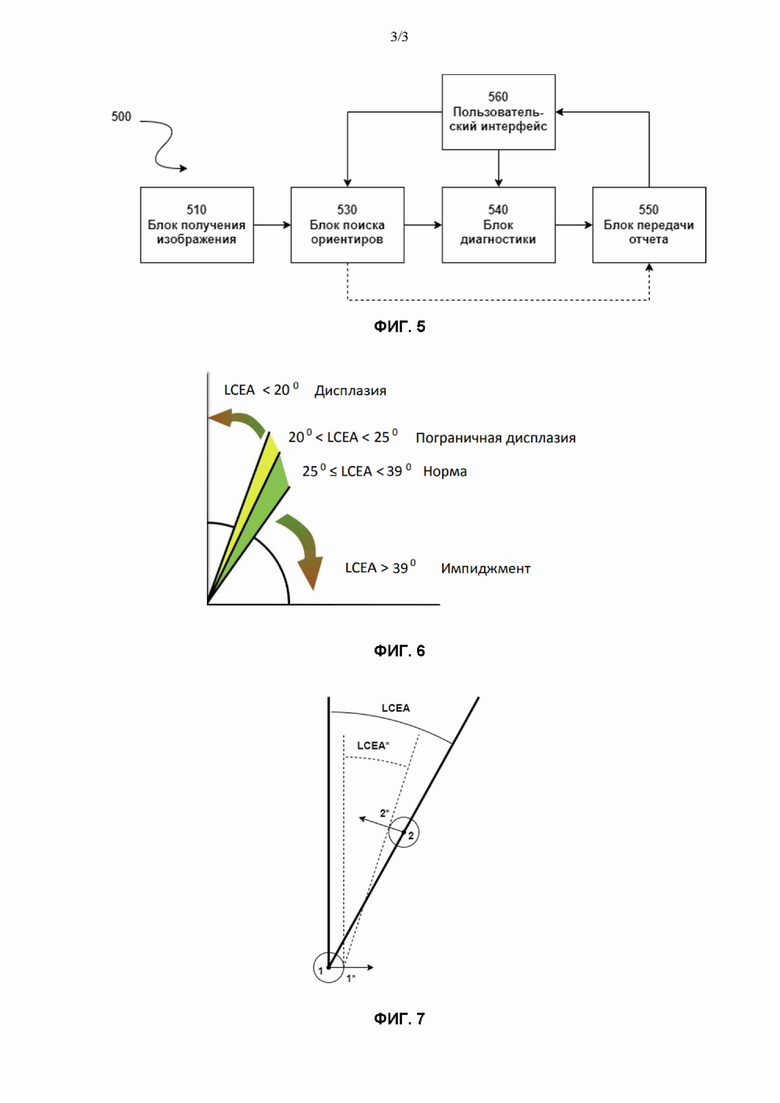
Группа изобретений относится к области обработки изображений и, более конкретно, к поддержке принятия врачебных решений на основе анализа медицинских изображений. Предложено устройство и способ для диагностики тазобедренных суставов, содержащее блок для получения трехмерного медицинского изображения, содержащего область таза; блок поиска ориентиров, выполненный с возможностью автоматически выявлять на полученном изображении анатомические ориентиры для диагностики тазобедренных суставов и выводить их координаты, причем выявление ориентиров включает в себя генерирование первоначального набора ориентиров-кандидатов и итеративное уточнение положения ориентиров в наборе на основе анализа пространственных взаимосвязей между ориентирами в наборе ориентиров-кандидатов с применением моделей обучения с подкреплением на базе обучающего набора изображений; блок диагностики, выполненный с возможностью вычислять клинические показатели, описывающие состояние здоровья тазобедренного сустава, на основе данных, выводимых блоком поиска ориентиров, и формировать отчет; и блок для передачи отчета на устройство, запрашивавшее диагностику. Группа изобретений обеспечивает повышение скорости, точности и автоматизации диагностики. 2 н. и 14 з.п. ф-лы, 7 ил.
1. Устройство для диагностики тазобедренных суставов, содержащее:
блок получения изображения, выполненный с возможностью получать трехмерное медицинское изображение, содержащее область таза;
блок поиска ориентиров, выполненный с возможностью, с использованием по меньшей мере одного процессора и памяти, автоматически выявлять на полученном изображении анатомические ориентиры для диагностики тазобедренных суставов и выводить их координаты, причем выявление ориентиров включает в себя:
- генерирование первоначального набора ориентиров-кандидатов на основе случайно выбранных точек на изображении, на основе средних местоположений соответствующих ориентиров, вычисленных по обучающим изображениям, или на основе данных о положении ориентиров-кандидатов, полученных от первой предварительно обученной нейронной сети, анализирующей полученное изображение;
- итеративное уточнение положения ориентиров в наборе на основе анализа пространственных взаимосвязей между ориентирами в наборе ориентиров-кандидатов с применением моделей обучения с подкреплением на базе обучающего набора изображений, причем анализ пространственных взаимосвязей включает в себя последовательное применение метода графического лассо, второй предварительно обученной нейронной сети и анализа чувствительности Морриса в отношении полученного изображения;
блок диагностики, выполненный с возможностью, с использованием по меньшей мере одного процессора и памяти, вычислять клинические показатели, описывающие состояние здоровья тазобедренного сустава, на основе данных, выводимых блоком поиска ориентиров, причем клинические показатели включают в себя: латеральный центрально-краевой угол (LCEA), шеечно-диафизарный угол (NSA), угол переднего сектора вертлужной впадины (AASA) и угол заднего сектора вертлужной впадины (PASA), и формировать отчет о состоянии здоровья тазобедренных суставов, содержащий по меньшей мере один вычисленный клинический показатель; и
блок передачи отчета, выполненный с возможностью передавать отчет на устройство, запрашивавшее диагностику.
2. Устройство по п. 1, в котором блок диагностики дополнительно выполнен с возможностью сопоставлять вычисленные клинические показатели с допустимыми пределами или диапазонами, делать вывод о наличии или отсутствии патологий тазобедренных суставов на основе сопоставления и включать упомянутый вывод в отчет.
3. Устройство по п. 2, в котором блок диагностики выполнен с возможностью формировать отчет, если на изображении выявлена патология, причем отчет содержит указание на наличие патологии и соответствующий по меньшей мере один вычисленный клинический показатель, подтверждающий наличие патологии.
4. Устройство по п. 1, в котором область таза на изображении включает в себя полностью обе вертлужные впадины и обе головки бедренных костей, пространство между ними и прилегающие части бедренных костей.
5. Устройство по п. 1, в котором блок поиска ориентиров дополнительно выполнен с возможностью формировать копию входного изображения с нанесенными на него ориентирами.
6. Устройство по п. 1, в котором анатомические ориентиры для диагностики тазобедренных суставов представляют собой опорные точки на изображении, необходимые для вычисления клинических показателей, описывающих состояние здоровья тазобедренного сустава.
7. Устройство по п. 1, в котором блок диагностики дополнительно выполнен с возможностью включать в отчет копию входного изображения с нанесенными на него ориентирами.
8. Устройство по любому из пп. 5 или 7, в котором блок передачи отчета дополнительно выполнен с возможностью передавать копию входного изображения с нанесенными на него ориентирами, выявленными блоком поиска ориентиров, на удаленный пользовательский интерфейс;
блок диагностики дополнительно выполнен с возможностью принимать ввод от пользователя, полученный через пользовательский интерфейс, указывающий надлежащие местоположения ориентиров, и вычислять клинические показатели с учетом принятого ввода от пользователя.
9. Устройство по п. 8, в котором блок диагностики выполнен с возможностью определять, что следует осуществлять передачу на пользовательский интерфейс, в случае если разница между по меньшей мере одним из вычисленных клинических показателей и границей соответствующего диапазона показателей, определяющих состояние здоровья тазобедренного сустава, не превышает предварительно заданный порог.
10. Устройство по п. 8, в котором блок диагностики выполнен с возможностью определять, что следует осуществлять передачу на пользовательский интерфейс, на основании того, может ли возможное отклонение, вызванное ошибкой определения положения ориентира, привести к выходу значения соответствующего клинического показателя за пределы того диапазона, в котором находится первоначально вычисленное значение клинического показателя.
11. Устройство по п. 10, в котором блок диагностики выполнен с возможностью определять положение отклоненного ориентира путем выбора случайной точки в пределах области возможного отклонения.
12. Устройство по п. 10, в котором блок диагностики выполнен с возможностью определять точку, соответствующую отклоненному ориентиру, в пределах области возможного отклонения в таком положении, которое обеспечивает максимальное отклонение значения соответствующего клинического показателя в направлении ближайшей границы диапазона этого показателя.
13. Устройство по любому из пп. 11 или 12, в котором область возможного отклонения задается в виде окружности с радиусом, равным предварительно заданной ошибке определения данного ориентира, или в виде замкнутой кривой, соответствующей предварительно заданному пространственному распределению вероятности отклонения данного ориентира.
14. Устройство по п. 13, в котором блок диагностики выполнен с возможностью вычислять или уточнять радиус отклонения ориентира и/или пространственное распределение вероятности отклонения ориентира путем калибровки системы, причем для калибровки выполняется передача изображений на пользовательский интерфейс без определения, следует ли осуществлять их передачу на пользовательский интерфейс.
15. Устройство по любому из пп. 5 или 7, в котором блок передачи отчета дополнительно выполнен с возможностью передавать копию входного изображения с нанесенными на него ориентирами, выявленными блоком поиска ориентиров, на удаленный пользовательский интерфейс;
блок поиска ориентиров дополнительно выполнен с возможностью принимать от пользовательского интерфейса копию входного изображения с нанесенными на него ориентирами, указанными пользователем, и сохранять его в обучающем наборе.
16. Способ диагностики тазобедренных суставов, содержащий этапы, на которых:
с использованием блока получения изображения получают трехмерное медицинское изображение, содержащее область таза;
с использованием блока поиска ориентиров автоматически выявляют на полученном изображении анатомические ориентиры для диагностики тазобедренных суставов и выводят их координаты, причем выявление ориентиров включает в себя:
- генерирование первоначального набора ориентиров-кандидатов на основе случайно выбранных точек на изображении, на основе средних местоположений соответствующих ориентиров, вычисленных по обучающим изображениям, или на основе данных о положении ориентиров-кандидатов, полученных от первой предварительно обученной нейронной сети, анализирующей полученное изображение;
- итеративное уточнение положения ориентиров в наборе на основе анализа пространственных взаимосвязей между ориентирами в наборе ориентиров-кандидатов с применением моделей обучения с подкреплением на базе обучающего набора изображений, причем анализ пространственных взаимосвязей включает в себя последовательное применение метода графического лассо, второй предварительно обученной нейронной сети и анализа чувствительности Морриса в отношении полученного изображения;
с использованием блока диагностики вычисляют клинические показатели, описывающие состояние здоровья тазобедренного сустава, на основе данных, выводимых блоком поиска ориентиров, причем клинические показатели включают в себя: латеральный центрально-краевой угол (LCEA), шеечно-диафизарный угол (NSA), угол переднего сектора вертлужной впадины (AASA) и угол заднего сектора вертлужной впадины (PASA), и формируют отчет о состоянии здоровья тазобедренных суставов, содержащий по меньшей мере один вычисленный клинический показатель; и
с использованием блока передачи отчета передают отчет на устройство, запрашивавшее диагностику.
| СПОСОБ ПОЛУЧЕНИЯ АЛЛОБЕТУЛИНА | 2013 |
|
RU2536405C1 |
| CN 114980810 A, 30.08.2022 | |||
| JP 2022512500 A, 04.02.2022 | |||
| JP 2022516586 A, 28.02.2022. | |||

