Область техники
Изобретение относится к области дистанционного контроля (мониторинга) проводов воздушных линий электропередачи (ВЛ) и может быть использовано для обеспечения непрерывного и дистанционного контроля, получения и передачи данных о состоянии ВЛ на пункт сбора информации (например, диспетчерский пункт).
Уровень техники
В текущий момент контроль электроснабжения осуществляется либо за счет информации от потребителей (звонок, обращение к диспетчеру), либо через установку на подстанциях «трансформатора тока» ТТ, «трансформатора напряжения» ТК которые по проводу передают информацию на диспетчерский пульт или через электронные устройства в компьютерные программы. Установка ТТ или ТК требуют обязательного отключения напряжения, внесение изменения в схему электроустановки, проверки лабораторией на предмет отсутствия короткого замыкания, прокладку провода передачи данных, дополнительные габаритные и весовые ограничения.
Из уровня техники известна интеллектуальная система мониторинга линий электропередач, состоящая из по меньшей мере одного, размещенного на проводе, контроллера и аппаратуры обработки данных, полученных с по меньшей мере одного контроллера. Контроллер, размещенный на проводе воздушной линии электропередачи, состоит из тороидальной разъемной катушки, в которой размещен датчик Холла в зазор тороидального магнитопроводящего материала. Передача данных осуществляется на отдельно стоящий блок, находящийся в радиусе 15 метров по ультракоротким волнам. Впоследствии отдельно расположенный блок посылает данные по средствам сотовой или спутниковой связи. https://www.gegridsolutions.com/multilin/catalog/fmc.htm
Также из уровня техники известен бесконтактный способ контроля технического состояния контактной сети, заключающийся в оценке износа и провиса проводов по результатам их видеосъемки (патент РФ №2066645, опубл. 1996 г.). Основной недостаток данного способа - крайне низкая точность и достоверность получаемых оценок, обусловленных малым пространственным разрешением видеокамеры и зашумленностью формируемого изображения.
Наиболее близким аналогом заявленного технического решения является способ и система диагностики и удаленного мониторинга контактной сети железной дороги (RU 2444449, опубл. 10.03.2012). В известном техническом решении осуществляют сбор информации о состоянии элементов контактной сети, передачу собранной информации и осуществляют последующую оценку технического состояния элементов контактной сети. Сбор и передачу информации о состоянии элементов контактной сети осуществляют посредством блоков сбора и передачи информации СДУМ, стационарно размещаемых вдоль контактной сети по всей ее длине, при этом посредством расположенных в блоках датчиков непрерывно регистрируют акустические и вибрационные характеристики, характеристики изменения магнитного поля, температуру элементов контактной сети, измеренные значения передают по каналу радиосвязи в размещаемые на узловых станциях по всей длине контактной сети промежуточные концентраторы информации, которые обеспечивают сбор и анализ информации от датчиков блоков с последующей передачей данных в единый концентратор информации о состоянии элементов контактной сети железной дороги. Система диагностики и удаленного мониторинга контактной сети железной дороги включает размещенные на анкерных опорах контактной сети консоли, несущий трос, струны, контактный провод, грузокомпенсирующие устройства несущего троса и контактного провода и содержит датчики параметров технического состояния элементов контактной сети, причем на участках несущего троса и контактного провода, расположенных непосредственно за роликами блоков грузокомпенсирующих устройств и/или над гирляндами грузов грузокомпенсирующих устройств, которые размещены на анкерных опорах контактной сети, по всей длине контактной сети стационарно закреплены блоки сбора и передачи информации, при этом каждый блок сбора и передачи информации содержит комплект датчиков параметров технического состояния элементов контактной сети, включающий датчики виброакустики и вибродиагностики элементов контактной сети, датчик магнитного поля и датчик температуры, а также автономный источник питания, микропроцессорное устройство для первичной аналого-цифровой обработки информации с датчиков блока, устройство радиосвязи между блоком и размещаемым на узловой станции промежуточным концентратором информации СДУМ, который соединен посредством проводной и/или беспроводной связи с единым концентратором информации о состоянии элементов контактной сети железной дороги.
К недостаткам способа и системы следует отнести наличие источников питания, требующих обслуживания (замены), ограничение по стойкости к внешним воздействующим факторам (отрицательные температуры эксплуатации), сложность блока сбора и передачи информации и его высокая стоимость, высокая трудоемкость применения в условиях железнодорожного транспорта, отсутствие контроля натяжения контактного провода. При этом известное техническое решение не позволяет оперативно оценить усилие натяжения проводов и тросов контактной сети.
Сущность изобретения
Технической задачей, стоящей перед изобретением, является создание способа диагностики и удаленного мониторинга состояний проводов воздушных линий электропередачи, контроллера и системы на его основе, позволяющих в режиме реального времени в непрерывном автоматическом режиме надежно и быстро осуществлять контроль состояний проводов воздушных линий электропередачи.
Техническим результатом заявленного изобретения является повышение достоверности информации о состоянии проводов линий электропередач, обеспечение возможности контроля состояния проводов линий электропередач в режиме реального времени.
Согласно изобретению, техническая задача решается, а технический результат достигается за счет того, что способ мониторинга линии электропередачи включает этапы, на которых: устанавливают на по меньшей мере одну секцию по меньшей мере одного провода линии электропередачи по меньшей мере один автономный неинвазивный контроллер, выполненный с возможностью автономной обработкой данных и беспроводной передачи информации, осуществляют круглосуточный контроль данных в задаваемом временном шаге, осуществляют передачу информации в виде цифровых значений с по меньшей мере одного контроллера на ЭВМ или мобильное устройство, обрабатывают информацию с по меньшей мере одного контроллера на ЭВМ или на мобильном устройстве, выделяют аварийное событие в сети при изменении цифрового значения свыше 20% за один временной шаг, определяют тип и причины аварийного события, и секцию провода в которой произошло аварийное событие.
В частном случае реализации заявленного технического решения тип аварийного события определяют по библиотеке событий, сформированной по данным с контроллеров на линии и аналогичных аномальных скачков с контроллеров, расположенных на других линях с последующим подтверждением реальной аварии.
В частном случае реализации заявленного технического решения дополнительно рассчитывают время восстановления энергоснабжения, с учетом регламентных сроков устранения конкретного аварийного случая, при этом учитывают информацию с геоинформационных систем о местонахождении аварийной бригады, определяют время прибытия аварийной бригады к аварийному участку с учетом онлайн сервисов навигационного движения автотранспорта и загруженности автомобильных дорог.
В частном случае реализации заявленного технического решения используют контроллер, содержащий корпус, выполненный с механизмом обхвата провода, внутри которого размещен датчик Холла, соединений электрически с микропроцессором, при этом микропроцессор соединен с блоком передачи данных и с блоком хранения данных, причем контроллер снабжен элементом питания, выполненным с возможностью обеспечения электропитанием, входящих в контроллер, упомянутых компонентов через систему распределения и управления питанием, и микропроцессор выполнен с возможностью управления работой контроллера, конвертирования аналогового сигнала от датчика Холла в цифровой, упаковки полученных данных в протоколы беспроводной передачи данных и системы хранения информации.
В частном случае реализации заявленного технического решения используют контроллер, содержащий корпус, снабженный механизмом обхвата провода, выполненного в виде подпружиненных лепестков, при этом лепестки ориентированы друг на друга и выполнены с возможностью обхвата провода в момент их закрытия.
В частном случае реализации заявленного технического решения используют корпус контроллера, выполненный из материала, прозрачного для электроволн.
В частном случае реализации заявленного технического решения контроллер устанавливают на линии электропередачи в начале и в конце линии, а также после каждой отпайки достигается секционировании линии и становиться возможным определить место аварийного участка.
В частном случае реализации заявленного технического решения устанавливают три контроллера на участок линии электропередач трехфазного электроснабжения, по одному контроллеру на провод.
В частном случае реализации заявленного технического решения устанавливают два контроллера на участок линии электропередач двухфазного электроснабжения, по одному контроллеру на провод.
В частном случае реализации заявленного технического решения размещают контроллер на проводе воздушной линии электропередачи посредством беспилотного летательного аппарата.
В частном случае реализации заявленного технического решения размещают контроллер на проводе воздушной линии электропередачи посредством диэлектрической штанги.
В частном случае реализации заявленного технического решения осуществляют передачу данных посредством протокола «интернет вещей», например, LoRa, NBIoT, XNB.
Краткое описание чертежей Детали, признаки, а также преимущества настоящего технического решения следуют из нижеследующего описания вариантов реализации заявленной полезной модели с использованием чертежей, на которых показано:
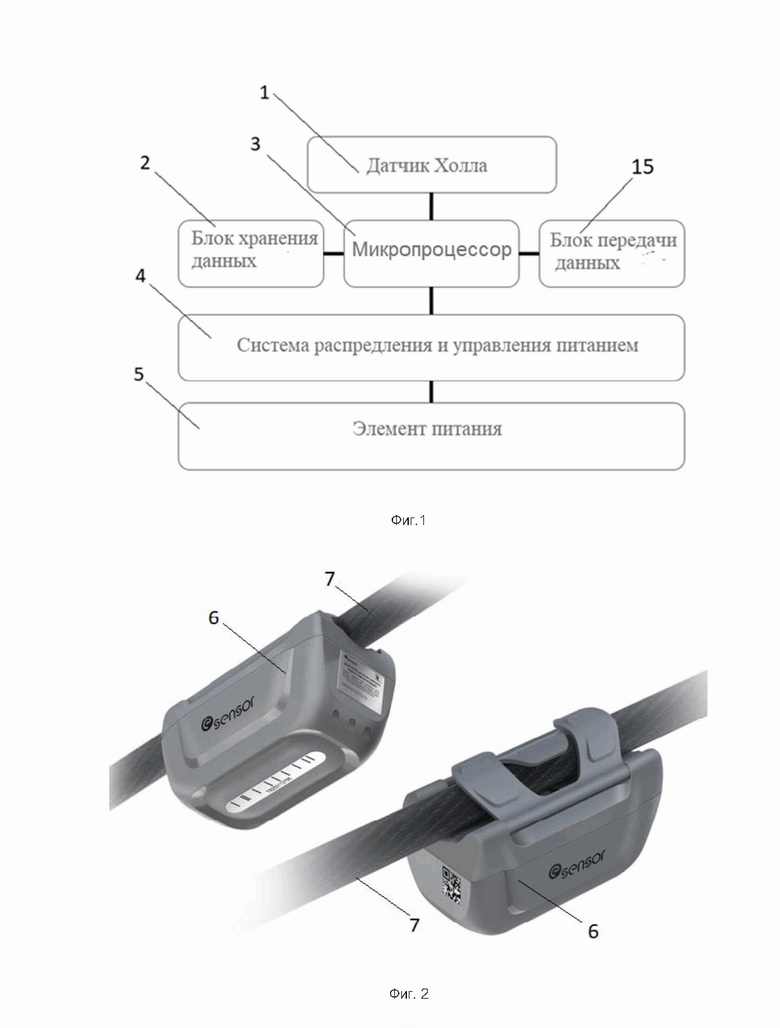
Фиг. 1 - принципиальная блок-схема автономного неинвазивного контроллера электрического тока в проводах линий электропередачи.
Фиг. 2 - общий вид автономного неинвазивного контроллера электрического тока в проводах линий электропередачи контроллера на проводе воздушной линии электропередачи.
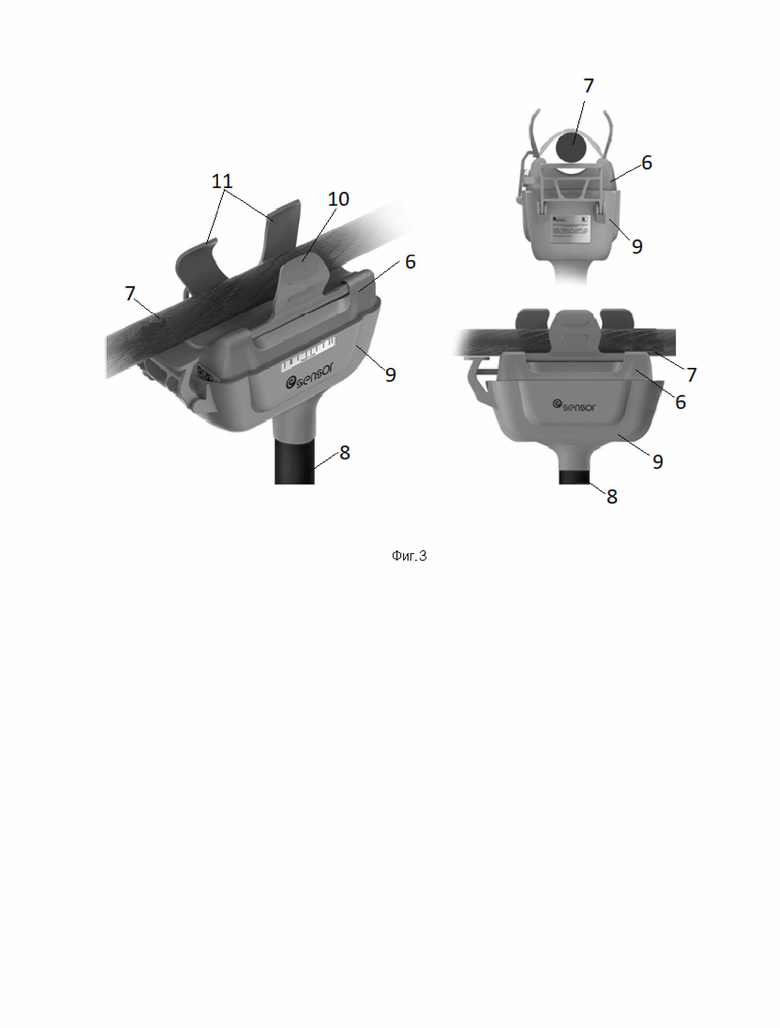
Фиг. 3 - общий вид автономного неинвазивного контроллера и способ доставки на провод линии электропередачи с помощью диэлектрической штанги.
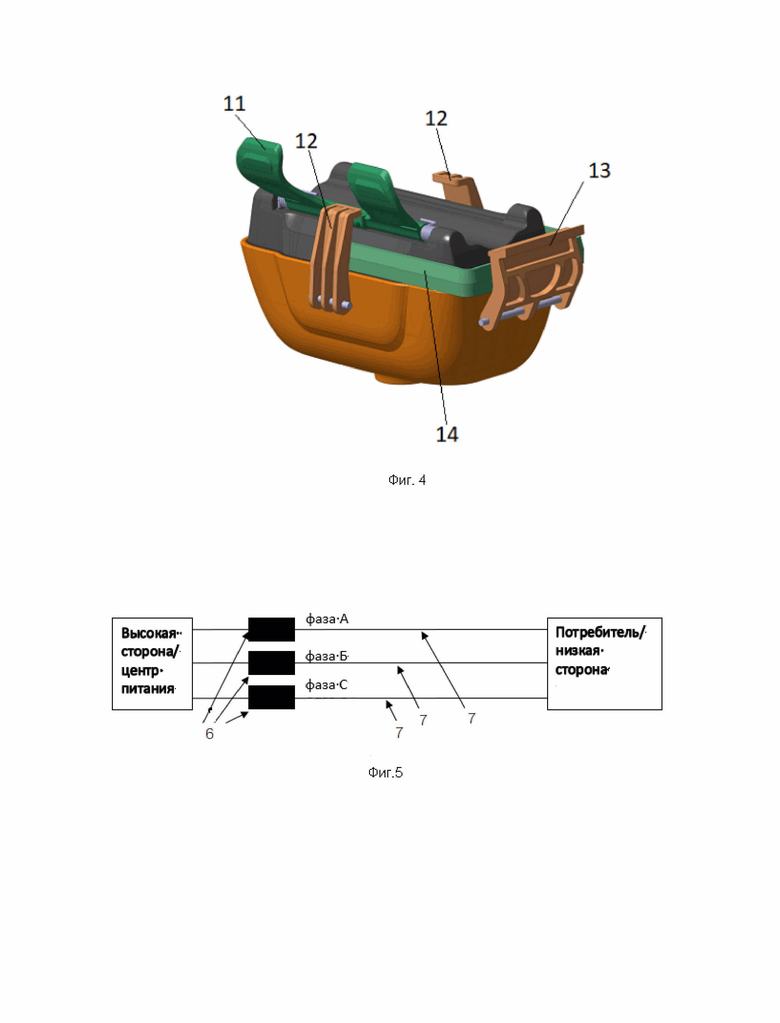
Фиг. 4 - механизм обхвата провода контроллера при доставке на провод линии электропередачи с помощью диэлектрической штанги приспособления типа «капкан».
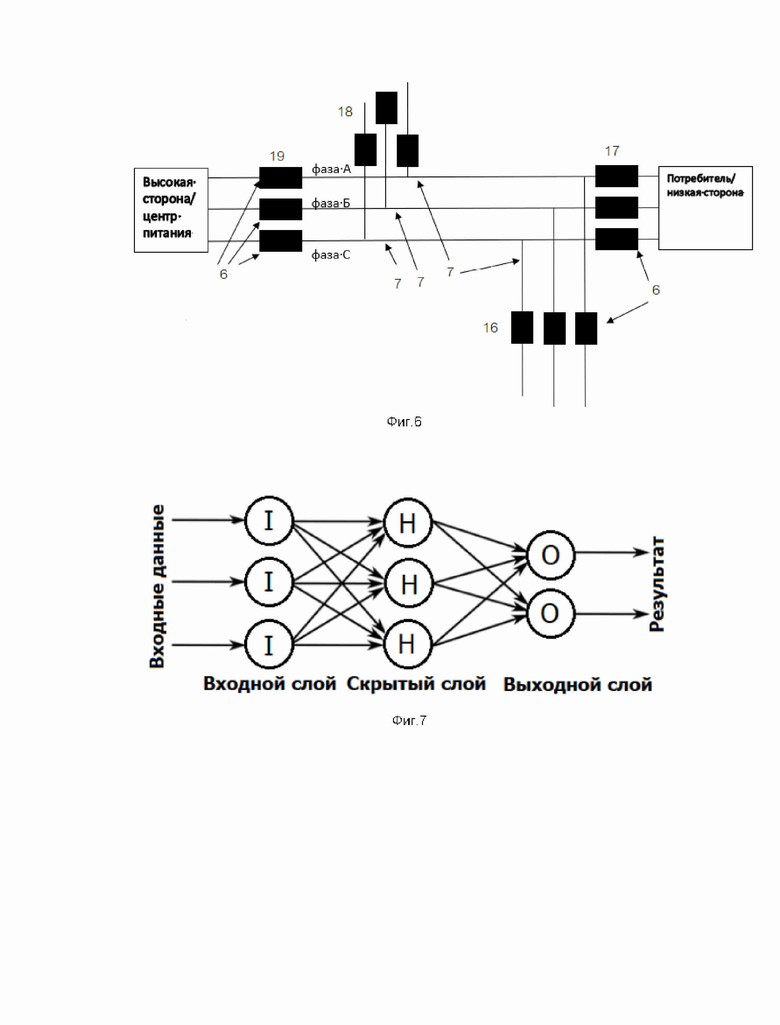
Фиг. 5 - пример схемы с одним контроллером, установленным на одном проводе.
Фиг. 6 - пример схемы с множеством контроллеров на одном проводе линии электропередачи.
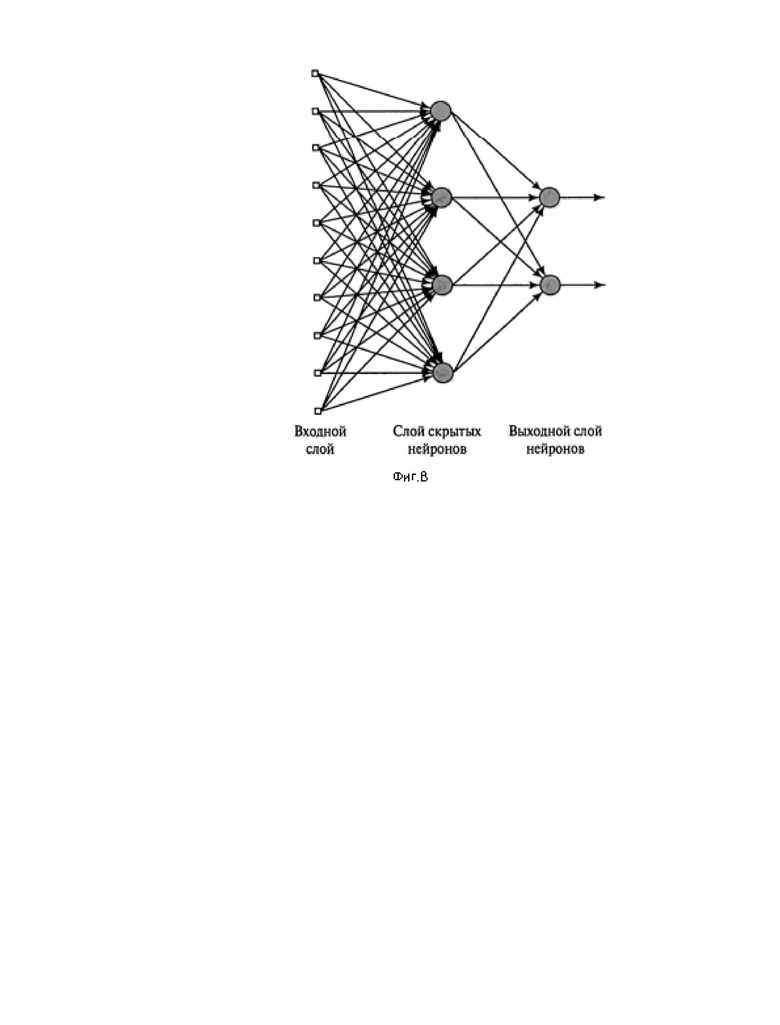
Фиг. 7 - алгоритм математических вычислений.
Фиг. 8 - алгоритм обучения системы.
На фигурах цифрами обозначены следующие конструктивные элементы: 1 - датчик Холла; 2 - блок хранения данных; 3 - микропроцессор; 4 - система распределения и управления питанием; 5 - элемент питания; 6 - контроллер; 7 - провод воздушной линии электропередачи; 8 - диэлектрическая штанга; 9 - гондола; 10 - одинарный лепесток; 11 - двойной лепесток; 12 - зацепы лепестков; 13 - пусковая деталь; 14 - толкатель; 15 - блок передачи данных; 16 - расположение контроллеров на проводах, пример аварийного события: обрыв трех проводов и падение проводов на землю или падение дерева на три провода; 17 - расположение контроллеров на проводах; 18 - расположение контроллеров на проводах; 19 - расположение контроллеров на проводах.
Раскрытие изобретения
Способ диагностики и удаленного мониторинга состояний проводов воздушных линий электропередачи реализован при помощи контроллера, позволяющего в режиме реального времени в непрерывном автоматическом режиме надежно и быстро осуществлять контроль состояний проводов воздушных линий электропередачи.
Контроллер, согласно способу, устанавливают на по меньшей мере одну секцию по меньшей мере одного провода линии электропередачи по меньшей мере один автономный неинвазивный контроллер. Контроллер выполнен с возможностью автономной обработкой данных и беспроводной передачи информации. Посредством контроллера осуществляют круглосуточный контроль данных в задаваемом временном шаге и осуществляют передачу информации в виде цифровых значений с по меньшей мере одного контроллера на ЭВМ или мобильное устройство.
При установленном минимальном числе контроллеров (Фиг. 5) - один контроллер на один провод (три контроллера при трехфазном и два контроллера при двухфазном электроснабжении) в случае отключений или аварийных режимов в сети электроснабжения на смартфон, планшет или стационарный компьютер будет приходить уведомление о событии на линии, ограниченный прогноз вероятных причин и возможное расчетное время восстановления энергоснабжения (время рассчитывается по регламентным срокам).
Уведомление будет содержать время события, место фиксации события, расчетное время устранения события в случае отключения электроснабжения.
Расчеты времени и вероятность причин проводит компьютерная программа.
Чем больше установлено контроллеров на линию (Фиг. 6) тем более точный прогноз причин и определение места события. Этот достигается за счет того, что каждый контроллер автономен в сборе данных и фиксирует данные по точке своего нахождения на линии.
Точка нахождения контроллера «е-Sensor» на линии обозначается в геоинформационных системах. По данным с каждого контроллера можно определить проблемный участок.
Данные с каждого прибора обрабатывает компьютерная программа и за счет алгоритмов дает прогнозы по причинам аварии и месту предполагаемого повреждения. Располагая контроллеры (Фиг. 5) на линии электропередачи в начале и в конце линии, а также после каждой отпайки достигается секционировании линии и становиться возможным определить место аварийного участка.
Анализируя данные с каждого контроллера, расположенного на одной линии электропередачи используя формулы электрофизики и математический анализ рассчитывается вероятность причины аварийного события (однофазное замыкание на замелю, межфазное замыкание, перекрытие всех трех фаз и т.д.) и секция в которой произошло аварийное событие. Дополнив информацию с геоинформационных систем о местонахождении аварийной бригады, времени которое потребуется бригаде добраться до аварийного сегмента и заложив в программу данные по регламентным срокам устранения аварии рассчитывается время восстановления энергоснабжения. Расчетное время может быть отправлено по средствам интернет в программные комплексы различных служб, ведомств или потребителей, подписавшихся на информирование.
Например, контроллеры размещены на фазах «А», «Б», «С» (фиг. 5) в нормальном состоянии электросети (отсутствуют аварии или критические режимы) на протяжении суток собирают и передают значения.
«А» - 22, 23, 24
«Б» - 21, 22, 23
«С» - 23, 24, 25
В течении месяца без аварий и критических режимов диапазон показаний расширился и было зафиксировано минимальное значение 16, максимальное значение 28. Изменение показаний имело шаг в одну единицу времени, то есть, при контроле данных каждые 10 секунд значение изменялось лишь на 1-но значение.
08:30:23-19
08:30:33-20
08:30:43-20
08:30:53-21
08:31:03-22
08:31:13-23
При расположении контроллеров как по казано на Фиг. 5 в случае трехфазного короткого замыкания справа от контроллеров (обрыв трех проводов и падение проводов на землю или падение дерева на три провода), например в 08:35:50 показания у контроллеров будут следующие:
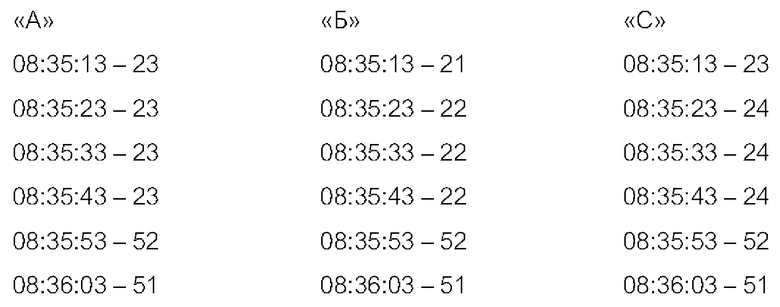
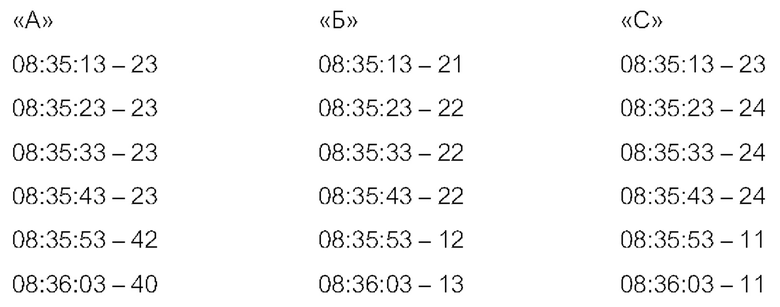
При расположении контроллеров «е-Sensor» как по казано на Фиг. 5 в случае однофазного замыкания на землю справа от контроллеров (обрыв провода «А» и падение его на землю), например в 08:35:50 показания у контроллеров будут следующие:
Превышение значения свыше 20% за один временной шаг, для компьютерной программы, введено как аномальное событие в сети. Установленный в контроллерах микропроцессор и компьютерная программа по данному событию отправляет сигнал о событии и данные в центр обработки данных. В центре обработки данных, используя библиотеку событий, компьютерная программа определяет, какое из возможных событий на линии могло произойти. Используя линейные уравнения по данным с контроллеров на линии и аналогичные аномальные скачки с приборов других линий с последующим подтверждением реальной аварии, рассчитывается вероятность одного или другого события именно для данной линии. После чего формируется сигнал для специалистов ведущих оперативное наблюдение за линией. Используя геоданные местонахождения выездной бригады, нормативы на устранения подобного вида аварий, онлайн сервисы навигационного движения автотранспорта и среднего времени перерыва энергоснабжения при подобной аварии на данной линии компьютерная программа сложив время и сравнив со средним значением перерывов посылает шаблонированное сообщение потребителям запитанным от данной линии (Фиг. 5 обозначен «Потребитель/низкая сторона»), об аварии на линии и предполагаемом времени ее устранения.
Полученную с по меньшей мере одного контроллера информацию обрабатывают на ЭВМ или на мобильном устройстве. При этом выделяют аварийное событие в сети при изменении цифрового значения свыше 20% за один временной шаг и определяют тип и причины аварийного события, и секцию провода в которой произошло аварийное событие.
Тип аварийного события определяют по библиотеке событий, сформированной по данным с контроллеров на линии и аналогичных аномальных скачков с контроллеров, расположенных на других линях с последующим подтверждением реальной аварии.
При расположении контроллеров как по казано на Фиг. 6 в случае трехфазного короткого замыкания вниз от контроллеров (16), обрыв трех проводов и падение проводов на землю или падение дерева на три провода, например в 08:35:50 показания у контроллеров будут следующие:
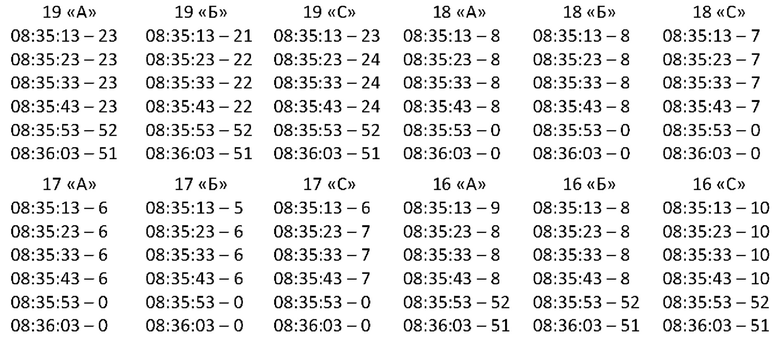
Превышение значения свыше 20% за один временной шаг, для компьютерной программы введено, как аномальное событие в сети. Установленный в контроллерах микропроцессор и компьютерная программа по данному событию отправляет сигнал о событии и данные в центр обработки данных. Где, используя библиотеку событий, геопозицию точек установленных контроллеров компьютерная программа определяет, какое из возможных событий на линии могло произойти. Используя линейные уравнения по данным с контроллеров на линии, плюс аналогичные аномальные скачки у приборов других линий с последующим подтверждением реальной аварии, рассчитывается вероятность одного или другого события именно для данной линии. После чего формируется сигнал для специалистов ведущих оперативное наблюдение за линией с указанием геоданных проблемного участка. Используя геоданные местонахождения выездной бригады, нормативы на устранения подобного вида аварий, онлайн сервисы навигационного движения автотранспорта и среднее время перерыва энергоснабжения при подобной аварии на данной линии компьютерная программа сложив время и сравнив со средним значением перерывов посылает шаблонированное сообщение потребителям запитанным от данной линии, об аварии на линии и предполагаемом времени ее устранения.
После определения типа и места аварийного события дополнительно рассчитывают время восстановления энергоснабжения, при этом учитывают регламентные сроки устранения конкретного аварийного случая, а также учитывают информацию с геоинформационных систем о местонахождении аварийной бригады, определяют время прибытия аварийной бригады к аварийному участку с учетом онлайн сервисов навигационного движения автотранспорта и загруженности автомобильных дорог.
Особенностью системы мониторинга электроснабжения на основе контроллеров в том, что:
- не требуется отключения линий электропередачи, ни для контроллеров, ни для приемо-передающих устройств;
- не требуется внесения изменений в существующие схемы электроснабжения, так как нет разрывов (сбор данных идет неинвазивным методом, а передача с помощью элемента питания (аккумулятора, заряжаемого от электромагнитного поля) на борту контроллера);
- данные с каждого контроллера поступают в цифровом виде. Это позволяет включать приборы в компьютерные программные и компьютерные комплексы без участия человека или дополнительного оператора;
- обеспечена непрерывность потока данных по временной шкале (без временного провала в сборе данных, даже в моменте аварии или после аварийного события происходит сбор данных);
- цифровой формат данных позволяет применять математические алгоритмы, для расчета вероятности («искусственный интеллект») аварийного события путем разметки состоявшегося события на основе реальных событий («машинное обучение»);
- возможно применение компьютерных программ сторонних разработчиков с информирование через различные виду уведомлений на смартфоны/планшеты не подвергая систему электроснабжения риску компьютерных атак.
Ниже по тексту описания приведен пример алгоритмов для расчета вероятности («искусственный интеллект») аварийного события путем разметки состоявшегося события на основе реальных событий («машинное обучение»):
Время восстановления - среднее арифметическое всех событий аварийного отключения и времени устранения аварии на линии

где t1 - разница между временем включения тока после аварийного события и временем обнуления тока по аварийному событию номер 1,
n - число аварийных событий.
Определение вероятности аварийного события по данным приборов на основе разности данных между двух измерений можно провести с помощью «сверхточных систем»/«нейросетей»/«машинное обучение».
Входные данные - разница показаний между двумя последовательными значениями превышающая, например 20%, хотя бы в одном из приборов.
Так как единое время и единые отрезки между измерениями значений, то каждый прибор имеет свою разницу по тому же отрезку времени. Выставляя веса-связи по каждому из вариантов аварийного события (однофазное замыкание на землю, межфазное замыкание всех трех фаз, замыкание двух фаз на землю и т.д.) прописывается скрытый слой - варианты аварийных событий.
При обучении системы с каждым циклом аварийных событий и подтверждением реальных действий регулируются веса-связи. Для того, чтобы на выходном слое получать результат - прогноз произошедшего аварийного события.
Чем больше приборов на линии, тем больше входных данных и более точный прогноз. По мере установки приборов на линии и рассмотрении различных физических процессов в проводах линий электропередачи при аварийных событиях, возможно в том числе и двух, трех, четырех слойные варианты построения вычислений.
Способ диагностики и удаленного мониторинга состояний проводов воздушных линий электропередачи реализован при помощи контроллера, содержащего корпус, выполненный с механизмом обхвата провода, внутри которого размещен датчик Холла, соединений электрически с микропроцессором, при этом микропроцессор соединен с блоком передачи данных и с блоком хранения данных, причем контроллер снабжен элементом питания, выполненным с возможностью обеспечения электропитанием, входящих в контроллер, упомянутых компонентов через систему распределения и управления питанием, и микропроцессор выполнен с возможностью управления работой контроллера, конвертирования аналогового сигнала от датчика Холла в цифровой, упаковки полученных данных в протоколы беспроводной передачи данных и системы хранения информации.
В заявленном способе используется автономный неинвазивный контроллер электрического тока, расположенный на проводах воздушных линий электропередачи. Контроллер выполнен с передачей данных беспроводным способом состоит из микропроцессора (3), соединенного электрической цепью с датчиком Холла (1). Микропроцессор (3) также электрической цепью соединен с блоком (2) хранения данных и с блоком передачи данных (15). Все элементы контроллера: датчик Холла (1), микропроцессор (3), элемент питания (5), блок (15) передачи данных, система (4) распределения и управления питанием, элемент питания (5), а также блок (2) хранения данных - расположены на интегральной схеме и размещены в корпусе контроллера (6). Электропитание контроллера (6) и входящих в него блока (15) передачи данных (модема протокола «интернет вещей»), блока (2) хранения данных, микропроцессора (3), датчика (1) Холла, осуществляется от элемента питания через систему распределения и управления питанием (4), выполненную с возможностью подачи, отключения тока элементам прибора (датчику Холла (1), блоку (15) передачи данных и блоку (2) хранения данных) в параметрах необходимых для каждого прибора, а также с возможностью контроля остаточной емкости элемента питания (5) и его зарядом.
Элемент питания в варианте реализации заявленного технического решения может быть выполнен в виде емкостного аккумулятора, или аккумулятора с подзарядкой от электромагнитного поля провода (7) линии электропередачи. Блок (15) передачи данных реализован на протоколе «интернет вещей», например, LoRa, NBIoT, XNB. Блок (2) хранения данных выполнен в виде компьютерной памяти или кэш-памяти. Для закрепления контроллера на проводе линии электропередачи используется корпус-крепеж, который обеспечивает электроволновую прозрачность, постоянное расстояние от проводника до датчика Холла и безопасное крепление без разрыва линии ЛЭП.
В варианте реализации настоящего изобретения контроллер устанавливают на линии электропередачи в начале и в конце линии, а также после каждой отпайки достигается секционировании линии и становиться возможным определить место аварийного участка.
В варианте реализации настоящего изобретения устанавливают три контроллера на участок линии электропередач трехфазного электроснабжения, по одному контроллеру на провод.
В варианте реализации настоящего изобретения устанавливают два контроллера на участок линии электропередач двухфазного электроснабжения, по одному контроллеру на провод.
В варианте реализации настоящего изобретения размещают контроллер на проводе воздушной линии электропередачи посредством беспилотного летательного аппарата.
В варианте реализации настоящего изобретения размещают контроллер на проводе воздушной линии электропередачи посредством диэлектрической штанги. С помощью диэлектрической штанги (8) оператор поднимает гондолу (9) в которой находится контроллер (6) до касания с проводом (7) воздушной линии электропередачи. Для этого контроллер (6) вставлен нижней частью в гондолу (9). Гондола (9) доставки на провод с помощью резьбового соединения закреплена на стандартной диэлектрической штанге (8).
Для фиксации контроллера (6) на проводе (7) воздушной линии электропередачи контроллер снабжен механизмом обхвата провода (7). Механизмом обхвата провода выполнен в виде лепестков, размещенных на корпусе контроллера. Лепестки размещены по краям поверхности корпуса контроллера, ориентированной к проводу (7) линии электропередач. При этом с одного края поверхности корпуса расположен двойной (11) лепесток, а с другого края -одинарный (10). Лепестки (10 и 11) ориентированы друг на друга таким образом, чтобы в момент их закрытия они обхватывали провод (7), при этом одинарный лепесток (10) входил в зазор между лепестками двойного лепестка (11).
Лепестки (10 и 11), выполнены подпружиненными. В качестве пружины для зажима провода используется пружина кручения (1). Плечи пружин фиксируются в отверстии в корпусе ложемента и лепестках. Двойные и одинарные лепестки захватываются двумя зацепами (12). К зацепам (12) с возможностью взаимодействия с ними подведен толкатель (14), который соединен с пусковой деталью (13), размещенной на корпусе контроллера.
Пусковая деталь (13) при давлении от провода линии электропередачи в момент установки контроллера на провод (7) начинает вращаться и тянет за собой толкатель (14). Толкатель толкает зацепы (12), которые в свою очередь высвобождают двойной (11) и одинарный (10) подпружиненные лепестки.
Контроллер по настоящему изобретению в отличие от известных аналогов не использует в своей конструкции тороидальную катушку за счет применения микропроцессора в самом приборе и компьютерной программы становиться возможным изменять частотную характеристику сбора информации для снятия данных с электромагнитного поля проводника тока (провода). Также позволяет отказаться от тороидальной катушки в конструкции контроллера размещение датчика Холла на постоянном расстоянии относительно провода. Реализовано в конструкции прибора и его креплении на провод.
Кроме того, контроллер выполнен с возможностью объединения в систему, при этом на одном проводе устанавливается как минимум два контроллера, а обработка данных с каждого отдельного прибора уже в цифровом виде обрабатываются в компьютерной программе на сервере или в облачных вычислениях, на которые посредством блока передачи данных отправляются данные с каждого контроллера, включенного в систему.
Контроллеры, объединенные в систему, устанавливают на каждый токонесущий провод линии электропередачи в начале и в конце линии и на каждом ответвлении от линии максимально близко к точке ответвления и максимально близко к концу ответвления. Количество контроллеров на одном проводе не лимитируется, чем чаще приборы установлены, тем выше точность определения места повреждения, большая информативность по работе линии, выше надежность системы.
Осуществление вычислений по относительным величинам (проценты), а не абсолютным. То есть, заявленная система позволяет фиксировать изменение, динамику изменения, беря за ноль величину ниже которой прибор не определяет величину.
Устройство работает следующим образом.
Датчик (1) Холла фиксирует электромагнитное поле, возникающее в проводе (7) линии электропередачи. Микропроцессорное устройство, выполненное на базе микропроцессора (3), с помощью компьютерной программы управляет работой датчика (1) Холла, преобразует сигнал в цифровой формат, задавая частоту снятия данных с датчика (1) Холла компьютерная программа получает кривую синусоиды электрического тока текущего в проводе (7) воздушной линии электропередачи.
Важным элементом контроллера является его доставка на провод (7). Для обеспечения безопасности, надежности и стабильности работы линии электропередачи, контроллер с помощью гондолы (9), навинченной на диэлектрической штанге, взведя лепестки, подноситься к проводу (7). При касании провода пусковой деталью (13), происходит захват провода лепестками (10 и 11) контроллера (6), после чего гондола (9) с диэлектрической штангой, оставляя контроллер (6) на проводе (7), возвращается на землю.
Опционально установка контроллера может производится с помощью беспилотных летательных аппаратов способных нести нагрузку от 250 грамм. Через зажим контроллер (6) присоединяется к беспилотному летательному аппарату, взводятся захватные лепестки (10 и 11) и при касании пусковой детали (13) лепестки (10 и 11) обжимают провод (7).
Контроллер (6) за счет сбора информации с электромагнитного поля провода линии электропередачи фиксирует данные - наличие/отсутствие электрического тока, сила электрического тока, частота, время отключения тока, время включения тока.
С помощью компьютерной программы, заложенной в микропроцессор (3), используя математические алгоритмы, полученные данные с датчика Холла анализируя синусоиду, через блок передачи данных (15) протокола «интернет вещей» (например, LoRa, NBIoT, XNB и т.д.) направляет сигнал на шлюз оператора связи.
По косвенным признакам - статистика данных, можно прогнозировать время отключения и время включения. По косвенным признакам частота и амплитуда можно прогнозировать причину нарушения электроснабжения. При сопоставлении данных с проводов одной линии можно прогнозировать варианты причины нарушения энергоснабжения.
При сопоставлении данных с разных точек установленных контроллеров на одной линии можно прогнозировать примерное место повреждения линии. При фиксации в геоинформационных компьютерных программах точки установки контроллера на одной линии электропередачи можно передавать ориентировочное место повреждение, а с помощью компьютерных программ рассчитывать время приезда на точку аварийной бригады и тем самым рассчитывать время восстановления энергоснабжения.
При сопоставлении данных по динамике изменения силы тока и марки провода по которому течет ток, можно рекомендовать замену провода на большее/меньшее сечение для эффективного управления активами и безаварийного энергоснабжения. При установке контроллеров на всех отходящих линиях от понижающего трансформатора тока на подстанциях и сопоставлении данных протекающего тока можно делать рекомендации по замене трансформатора тока на большую или меньшую мощность трансформатора тока для управления активами по риск ориентированной модели и надежного энергоснабжения.
Косвенным признаком наличие/отсутствие протекание электрического тока по питающему проводу можно вести контроль работы электроприборов - ламп освещения, насосного оборудования, генераторов и т.д. за счет сигнала с контроллера можно с помощью компьютерной программы вести точный учет работы электроприборов, а так же по выставленным критериям (сила тока, время с током или без тока) сигнализировать о наступлении события.
Изобретение относится к области дистанционного контроля (мониторинга) проводов воздушных линий электропередачи (ВЛ) и может быть использовано для обеспечения непрерывного и дистанционного контроля, получения и передачи данных о состоянии ВЛ на пункт сбора информации (например, диспетчерский пункт). Способ включает этапы, на которых: устанавливают на по меньшей мере одну секцию по меньшей мере одного провода линии электропередачи по меньшей мере один автономный неинвазивный контроллер, выполненный с возможностью автономной обработки данных и беспроводной передачи информации. Осуществляют круглосуточный контроль данных в задаваемом временном шаге. Осуществляют передачу информации в виде цифровых значений с по меньшей мере одного контроллера на ЭВМ или мобильное устройство. Обрабатывают информацию с по меньшей мере одного контроллера на ЭВМ или на мобильном устройстве. Выделяют аварийное событие в сети при изменении цифрового значения свыше 20% за один временной шаг. Определяют тип и причины аварийного события и секцию провода, в которой произошло аварийное событие. Технический результат заключается в повышении точности контроля состояния проводов линий электропередач и обеспечение возможности контроля состояния проводов линий электропередач в режиме реального времени. 11 з.п. ф-лы, 8 ил.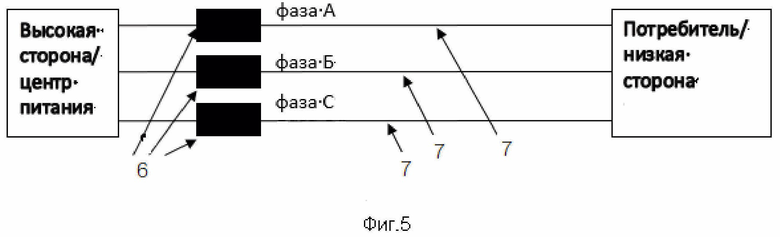
1. Способ мониторинга линии электропередачи, включающий этапы, на которых:
устанавливают на по меньшей мере одну секцию по меньшей мере одного провода линии электропередачи по меньшей мере один автономный неинвазивный контроллер, выполненный с возможностью автономной обработки данных и беспроводной передачи информации,
осуществляют круглосуточный контроль данных в задаваемом временном шаге,
осуществляют передачу информации в виде цифровых значений с по меньшей мере одного контроллера на ЭВМ или мобильное устройство,
обрабатывают информацию с по меньшей мере одного контроллера на ЭВМ или на мобильном устройстве,
выделяют аварийное событие в сети при изменении цифрового значения свыше 20% за один временной шаг,
определяют тип и причины аварийного события, и секцию провода, в которой произошло аварийное событие.
2. Способ по п. 1, отличающийся тем, что тип аварийного события определяют по библиотеке событий, сформированной по данным с контроллеров на линии и аналогичных аномальных скачков с контроллеров, расположенных на других линях с последующим подтверждением реальной аварии.
3. Способ по п. 1, отличающийся тем, что дополнительно рассчитывают время восстановления энергоснабжения, с учетом регламентных сроков устранения конкретного аварийного случая, при этом учитывают информацию с геоинформационных систем о местонахождении аварийной бригады, определяют время прибытия аварийной бригады к аварийному участку с учетом онлайн сервисов навигационного движения автотранспорта и загруженности автомобильных дорог.
4. Способ по п. 1, отличающийся тем, что используют контроллер, содержащий корпус, выполненный с механизмом обхвата провода, внутри которого размещен датчик Холла, соединенный электрически с микропроцессором, при этом микропроцессор соединен с блоком передачи данных и с блоком хранения данных, причем контроллер снабжен элементом питания, выполненным с возможностью обеспечения электропитанием входящих в контроллер упомянутых компонентов через систему распределения и управления питанием, и микропроцессор выполнен с возможностью управления работой контроллера, конвертирования аналогового сигнала от датчика Холла в цифровой, упаковки полученных данных в протоколы беспроводной передачи данных и системы хранения информации.
5. Способ по п. 1, отличающийся тем, что используют контроллер, содержащий корпус, снабженный механизмом обхвата провода, выполненного в виде подпружиненных лепестков, при этом лепестки ориентированы друг на друга и выполнены с возможностью обхвата провода в момент их закрытия.
6. Способ по пп. 4, 5, отличающийся тем, что используют корпус контроллера, выполненный из материала, прозрачного для электроволн.
7. Способ по п. 1, отличающийся тем, что контроллер устанавливают на линии электропередачи в начале и в конце линии, а также после каждой отпайки достигается секционирование линии и становится возможным определить место аварийного участка.
8. Способ по п. 1, отличающийся тем, что устанавливают три контроллера на участок линии электропередач трехфазного электроснабжения, по одному контроллеру на провод.
9. Способ по п. 1, отличающийся тем, что устанавливают два контроллера на участок линии электропередач двухфазного электроснабжения, по одному контроллеру на провод.
10. Способ по п. 1, отличающийся тем, что размещают контроллер на проводе воздушной линии электропередачи посредством беспилотного летательного аппарата.
11. Способ по п. 1, отличающийся тем, что размещают контроллер на проводе воздушной линии электропередачи посредством диэлектрической штанги.
12. Способ по п. 1, отличающийся тем, что осуществляют передачу данных посредством протокола «интернет вещей», например, LoRa, NBIoT, XNB.
| US 2010033345 A1, 11.02.2010 | |||
| Захватное за рельс приспособление "лягушка" в круговоротчиках | 1931 |
|
SU27946A1 |
| US 2012278011 A1, 01.11.2012 | |||
| Способ мониторинга воздушных линий электропередач | 2016 |
|
RU2612742C1 |
| Способ мониторинга технического состояния воздушных линий электропередачи по углу вращения провода либо грозотроса | 2019 |
|
RU2738411C1 |
| US 2019349727 A1, 14.11.2019. | |||

