Изобретение относится к медицине и ветеринарии и может быть использовано для обучения и совершенствования практическому навыку проведения манипуляции эпидуральной и спинномозговой пункций.
Эпидуральная анестезия, она же «перидуральная» - один из методов регионарной анестезии, при котором лекарственные препараты вводятся в эпидуральное пространство позвоночника через катетер. Инъекция приводит к потере болевой чувствительности (анальгезия), потере общей чувствительности (анестезия) или к расслаблению мышц (миорелаксация). Спинномозговая пункция (поясничный прокол, люмбальная пункция, поясничная пункция) - введение иглы в субарахноидальное пространство спинного мозга на поясничном уровне. Проводится с целью диагностики состава спинномозговой жидкости, а также с лечебной или анестезиологической целью. Таким образом, обе манипуляции сходны по методике их проведения - игла проходит через различные слои мягких тканей спины, затем должна попасть в промежуток между позвонками, затянутый желтой связкой (ligamentum flava), после чего вводится анестетик в эпидуральное пространство, либо в случае спинномозговой пункции прокалываются оболочки спинного мозга с целью получения спинномозговой жидкости или проведения спинальной анестезии. Процедуры эти весьма серьезны и при неправильном проведении могут приводить к развитию опасных осложнений [Kopacz DJ, Neal JM, Pollock JE. The regional anesthesia "learning curve". What is the minimum number of epidural and spinal blocks to reach consistency? Reg Anesth. 1996 May-Jun;21(3):182-90].
Известны различного рода устройства - имитаторы, предназначенные для тренировки навыка процедуры эпидуральной анестезии и спинномозговой пункции. Как правило, подобные устройства состоят из муляжа спины пациента и различного рода сменных блоков, представляющих собой имитацию слоев мягких тканей спины, помещающихся в симулятор над имитацией позвоночного столба, изготовленного из твердого материала, препятствующего прохождению иглы [Duggan JE. An epidural simulator device for training practitioners in the anaesthetic technique of epidural injection. GB Patent GB 2369714; 2000; Simulab Corporation, Washington, USA. Medical training models, 2011]. Основным свойством для подобного симулятора является создание достаточно реалистичных тактильных ощущений, возникающих при прохождении слоев мягких тканей и затем прохождения желтой связки, а также позволять имитировать какой либо из методов идентификации эпидурального пространства [Daykin АР, Bacon RJ. An epidural injection simulator. Anaesthesia. 1990;45:235-6; Paw HG. A trainer for identification of the epidural space. Anaesthesia. 1995;50:914]. Игла попадает в эпидуральное пространство, как только ее конец проходит через желтую связку, отодвигая твердую мозговую оболочку. Возникающее отрицательное давление подтверждает то мнение, что эпидуральное пространство представляет собой лишь потенциально существующий канал. Точная идентификация момента попадания иглы в эпидуральное пространство снижает риск повреждения твердой мозговой оболочки. Методы идентификации эпидурального пространства делятся на две основные категории: методика «утраты сопротивления» и методика «висячей капли».
Методика «утраты сопротивления» - наиболее распространенный способ идентификации эпидурального пространства. Проведение иглы через кожу в межостистую связку ощущается как значительное сопротивление. Когда конец иглы входит в толщу межостистой связки, мандрен извлекают и к игле присоединяют шприц, заполненный воздухом или изотоническим раствором натрия хлорида. Если попытка ввести раствор встретит значительное сопротивление или будет невозможна, то конец иглы действительно находится в толще межостистой связки и ее можно продвигать вперед.
Контролировать продвижение иглы можно двумя способами. Один состоит в том, что иглу с подсоединенным шприцем медленно непрерывно продвигают вперед левой рукой, а правой постоянно оказывают давление на поршень шприца. При попадании конца иглы в эпидуральное пространство резко снижается сопротивление и поршень внезапно легко продвигается вперед. Второй способ заключается в том, что иглу продвигают поступательными движениями, за один раз подавая ее вперед на несколько миллиметров, после чего останавливаются и осторожно надавливают на поршень шприца, пытаясь определить по ощущениям - находится ли игла еще в толще связок, или же сопротивление уже утрачено и она попала в эпидуральное пространство. Второй способ быстрее и практичнее, но требует некоторого опыта, чтобы вовремя остановиться и избежать перфорации твердой мозговой оболочки.
Используя методику «утраты сопротивления», можно вводить изотонический раствор натрия хлорида или воздух, в зависимости от предпочтений анестезиолога. Имеются сообщения о том, что пузырьки воздуха могут быть причиной неполной или мозаичной блокады, но это возможно лишь при введении значительных объемов воздуха. Изотонический раствор натрия хлорида легко спутать с цереброспинальной жидкостью, что создает затруднения при подозрении на непреднамеренную пункцию твердой мозговой оболочки.
Методика «висячей капли». Иглу (лучше со щитком) вводят глубоко в межостистую связку, после чего удаляют мандрен. К павильону иглы подвешивают каплю жидкости - чаще всего изотонического раствора натрия хлорида. Пока игла продвигается через плотные связки, капля не смещается. После пункции желтой связки и попадания конца иглы в эпидуральное пространство «висячая капля» исчезает в просвете иглы под воздействием отрицательного давления. Однако, если игла окажется обтурированной, то капля не будет втягиваться из павильона в просвет иглы и ее будут продвигать вперед вплоть до того момента, когда истечение цереброспинальной жидкости засвидетельствует перфорацию твердой мозговой оболочки. Следует отметить, что методику «висячей капли» применяют только очень опытные анестезиологи. Также данная методика используется для околосрединного доступа.
Также следует учитывать, что эпидуральная пункция может выполняться на уровне всех четырех отделов позвоночника: шейном, грудном, поясничном, крестцовом.
Описанные симуляторы-муляжи обладают хорошей реалистичностью, но имеют и значительные недостатки. Так, сложно составить представление о различных анатомических вариантах строения спины (например, в случае выраженного сколиоза), а имеющаяся постоянная необходимость в расходных материалах обуславливает высокую стоимость их применения в учебном и аккредитационном процессах. Эти недостатки заставляют разработчиков симуляционного оборудования обратиться к созданию виртуальных симуляторов процедуры эпидуральной анестезии.
Обычно устройства для симуляции эпидуральной анестезии состоят из устройства, создающего тактильную обратную связь (гаптик-устройство), позволяющее создавать определенные усилия на руку обучающегося и экрана, создающего изображение спины и пункционной иглы [Vaughan, Neil & Dubey, Venketesh & Wee, Michael & Isaacs, Richard. (2013). A review of epidural simulators: Where are we today? // Medical engineering & physics. 35.10.1016/j.medengphy.2013.03.003]. Ряд подобных симуляторов использует гаптик-устройства с одной степень свободы (1-DOF). У подобных устройств усилия создаются в одном направлении, как правило для этой цели используются специально разработанные устройства. Они позволяют дать исключительно точную картину тактильных ощущений, при прохождении слоев тканей спины к эпидуральному пространству, возможно даже более точную чем многие из муляжей [Isaacs, R & Wee, Myk & Parker, В & Dubey, VN & Vaughan, Neil. (2014). Measurement of epidural insertion pressures in labouring women of varying body mass indices and imaging of the lumbar spine to develop a high-fidelity epidural simulator for training. Anaesthesia. 69. 84-84]. Однако, при использовании подобных устройств выбор места вхождения в спину (точка входа), а также угла вхождения либо задан изначально, либо определяется путем выбора из предварительно заданных, либо выбирается с какого-либо устройства ввода (мыши, клавиатуры, тачскрина). В виртуальных симуляторах также часто используется шприц, соединенный с гаптик-устройством, который соединен с пневматической или гидравлической системой с датчиком давления, позволяющий создавать эффекты отрицательного давления в эпидуральном пространстве и реализующие имитацию для обучающегося тех или иных способов идентификации эпидурального пространства или получения спинномозговой жидкости при спинномозговой пункции.
Некоторые виртуальные симуляторы эпидуральной анестезии и спинномозговой пункции используют гаптик-устройства с несколькими степенями свободы, что позволяет не только создать ощущения прохождения через слои мягких тканей, но и осуществить выбор места проведения эпидуральной процедуры (точку входа) и наклон иглы. Например, для этой цели широко используются гаптик-устройства типа Sensable (Geomagic) Phantom [Glassenberg R, Glassenberg S. Development of a Tactile Feedback Simulator for Placement of an Epidural or Spinal Needle. Anesthesiology. 2004; 101:A1358; Coles TR, John NW. The effectiveness of commercial haptic devices for use in virtual needle insertion training simulations. In Advances in Computer-Human Interaction, Third International Conference 2010;148-153; Magill JC, Byl MF, Hinds MF, Agassounon W, Pratt SD, Hess PE. A novel actuator for simulation of epidural anesthesia and other needle insertion procedures. Simul Healthc 2010;5(3):179-84]. Однако, Sensable Phantom, являясь устройством с 6 степенями свободы (6 DOF) имеет возможность создания тактильной обратной связи только на 3 из них (motorized 3 DOF+free 3 DOF). Таким образом, не удается зафиксировать угол прохождения иглы через ткани спины, заданный в точке входа, что авторы подобных симуляторов пытаются решить различными способами, которые в целом решают этот вопрос в сцене виртуальной реальности, но при этом никак не помогают с фиксацией заданного в точке входа угла на самом устройстве. Существует устройство фирмы Mediseus (патент США WO 2007/068050 A1), включающее в себя гаптик-устройство Sensable Phantom, установленное внутри муляжа спины, при этом игла проходит через точку входа в данном муляже и прикреплена к рукоятке гаптик устройства, таким образом, указанный недостаток - отсутствие в этом гаптик-устройстве нужного числа степеней свободы с созданием тактильного усилия устраняется. Но виртуальные симуляторы эпидуральной анестезии и спинномозговой пункции, построенные на основе цифрового пера Sensable Phantom страдают еще и от недостатков, присущих кинематической схеме этого гаптик-устройства, представляющего собой последовательный рычажный механизм, что накладывает значительные ограничения на создаваемые им усилия тактильной обратной связи и, соответственно на реалистичность создаваемых им ощущений при прохождении различных слоев мягких тканей.
Кроме этого, на реалистичность подобных устройств влияет и расположение экрана устройства, на котором визуализируется виртуальная сцена. В большинстве случаев экран расположен отдельно от устройства создания обратной связи и не предполагает стереоскопического изображения, что в значительной мере снижает эффект от применения подобного симулятора [Ravali, G., & Manivannan, М. (2017). Haptic feedback in needle insertion modeling and simulation. IEEE reviews in biomedical engineering, 10, 63-77; Gourishetti, R., & Manivannan, M. (2019). Improved force JND in immersive virtual reality needle insertion simulation. Virtual Reality, 23(2), 133-142].
Наиболее близким устройством виртуального симулятора эпидуральной анестезии и спинномозговой пункции является устройство, описанное выше, содержащее гаптик-устройство с укрепленным на нем шприцем, соединенным с пневматической системой, не имеющее фиксированной механически точки входа и экран для визуализации виртуальной сцены. Наиболее существенным недостатком подобных устройств являются отсутствие механического ограничения угла прохождения пункционной иглой тканей и адекватной визуализации виртуальной сцены.
Нами впервые предлагается симулятор эпидуральной анестезии и спинномозговой пункции, содержащий гаптик-устройство для создания тактильной обратной связи в виде дельта-механизма с жестко размещенным на его подвижной площадке шприцем, соединенным с пневматической системой для создания и поддержания в нем заданного давления, а также экран для визуализации виртуальной сцены, размещенный над гаптик-устройством.
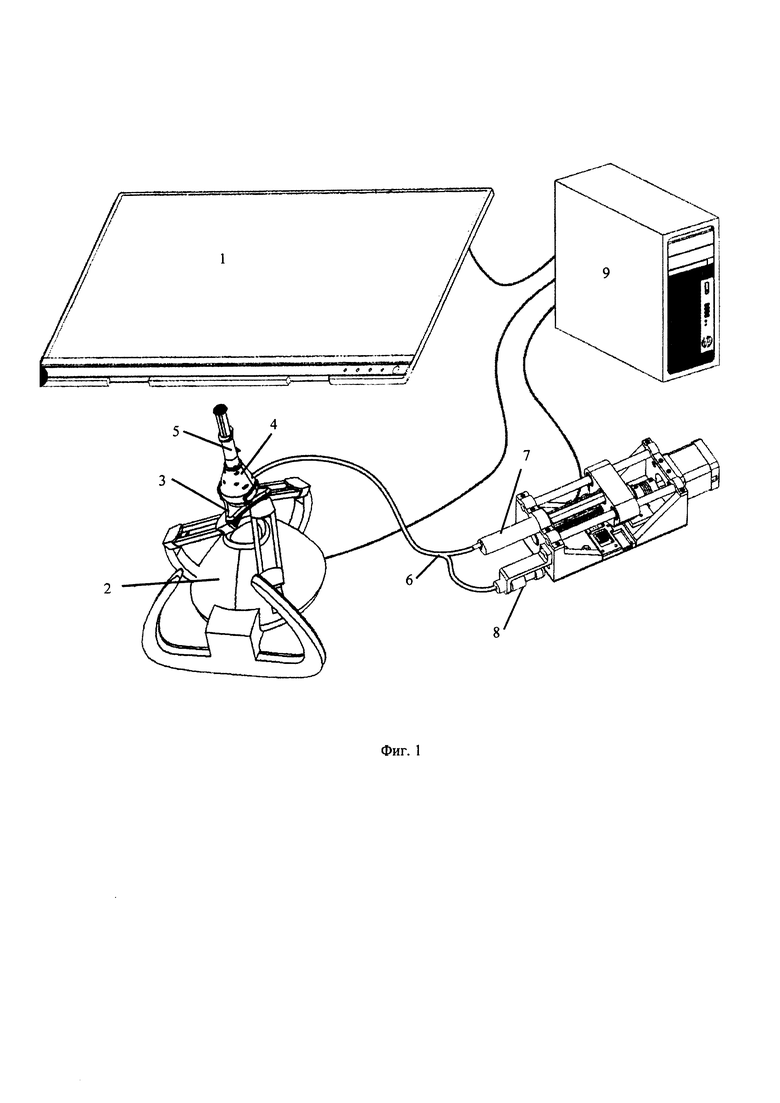
Оптическая схема виртуального эпидурального симулятора представлена на Фиг. 1, где:
1 - дисплей с тачскрином
2 - гаптик-устройство (дельта-механизм)
3 - подвижная площадка гаптик-устройства (дельта-механизма)
4 - крепление шприца с имитацией пункционной иглы
5 - шприц
6 - шланги пневматической системы
7 - насос
8 - датчик давления воздуха
9 - контролирующее устройство (персональный компьютер)
Виртуальный эпидуральный симулятор состоит из дисплея с тачскрином 1, установленного над гаптик-устройством 2, кинематическая схема которого -параллельное устройство или дельта-механизм. На подвижной площадке 3 гаптик-устройства 2 при помощи крепления шаприца с имитацией пункционной иглы 4 жестко закреплен шприц 5. Шприц 5 соединен при помощи шлангов пневматической системы 6 с насосом 7 и датчиком давления воздуха 8. Создает, контролирует виртуальную сцену и визуализирует ее на дисплее с тачскрином 1 контролирующее устройство (персональный компьютер) 9.
Работа с виртуальным эпидуральным симулятором производится следующим образом обучающийся управляет симулятором удерживая в руке шприц 5, жестко закрепленный на подвижной площадке 3 гаптик-устройства 2. Перемещая шприц 5 и, соответственно подвижную площадку 3 гаптик-устройства 2 обучающийся задает положение шприца и пункционной иглы в виртуальной сцене, которая отображается на дисплее 1. При помощи тачскрина дисплея 1 обучающийся может изменять положение тела пациента в виртуальной сцене в определенных пределах, что задает угол входа иглы в виртуальной сцене. Расположение дисплея с тачскрином 1 над гаптик-устройством 2 приводит к тому, что обучающийся наблюдает движения не своих рук, а
манипуляции, проводимые им с помощью гаптик-устройства в виртуальной сцене, создавая эффект его присутствия в данной сцене. Гаптик-устройство 2 после введения обучающимся виртуальной иглы в виртуальную модель спины, размещенную на сцене создает усилия, необходимые для создания тактильных ощущений, сопутствующих прохождению пункционной иглой всех слоев мягких тканей спины человека при эпидуральной процедуре. Управляет гаптик-устройством 2 и контролирует поведение объектов в виртуальной сцене контролирующее устройство (персональный компьютер) 9. После попадания в эпидуральное пространство контролирующее устройство (персональный компьютер) управляет насосом 7, изменяя давление в пневматической системе, соединенной со шприцем 5, имитируя изменение давления в шприце при попадании в эпидуральное пространство. Контроль за изменением давления в пневматической системе контролирующее устройство (персональный компьютер) 9 ведет при помощи датчика давления воздуха 8.
Таким образом, использование кинематической схемы параллельного устройства (дельта-механизма) в гаптик-устройстве 2 обуславливает его большую пространственную стабильность и возможность создания значительных усилий, требующихся при имитации прохождения мягких тканей спины и, особенно, желтой связки. Также этому способствует и жесткое соединение шприца 5 с подвижной площадкой 3 гаптик-устройства (дельта механизма) 2. Жесткое крепление шприца 4 с имитацией павильона иглы Туохи создает дополнительную тактильную реалистичность ощущений для обучающегося. Расположение дисплея с тачскрином 1 над устройством приводит к наблюдению обучающимся исключительно виртуальной сцены и своих манипуляций в ней, что способствует созданию реалистичных зрительных ощущений при проведении этих манипуляций (особенно этот эффект проявляется при создании тем или иным образом стереоскопического изображения на дисплее).
Благодаря применению кинематической схема параллельного устройства (дельта-механизма) в гаптик-устройстве обеспечивается значительная пространственная стабильность, высокое усилие при создание тактильной обратной связи и реалистичность тактильных ощущений, расположение дисплея над гаптик-устройством обеспечивает эффект непосредственного участия и присутствия обучающегося в виртуальной сцене, позволяя также интерактивно задать угол входа в мягкие ткани спины, а пневматическая система дает возможность качественной имитации эффектов для точной идентификации эпидурального пространства в виртуальной сцене.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИМУЛЯЦИИ ВЗАИМОДЕЙСТВИЙ С ТВЁРДЫМИ ТЕЛАМИ И ИХ ОБРАБОТКИ БОРМАШИНОЙ С ИМИТАЦИЕЙ ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗИ, РЕАЛИЗУЕМЫЙ НА ЭВМ | 2016 |
|
RU2618843C1 |
| Способ проведения комбинированной одноуровневой раздельной спинально-эпидуральной анестезии парамедиальным доступом | 2021 |
|
RU2762483C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ В ЭПИДУРАЛЬНОЕ ИЛИ СУБДУРАЛЬНОЕ ПРОСТРАНСТВО СПИННОГО МОЗГА | 1999 |
|
RU2160058C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ИГЛЫ В ЗАДНЕМ ЭПИДУРАЛЬНОМ ПРОСТРАНСТВЕ ПРИ ПРОВЕДЕНИИ ЭПИДУРАЛЬНОЙ БЛОКАДЫ | 2012 |
|
RU2516554C2 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ | 2003 |
|
RU2238043C1 |
| СПОСОБ КОМБИНИРОВАННОЙ СПИНАЛЬНО-ЭПИДУРАЛЬНОЙ АНЕСТЕЗИИ | 2001 |
|
RU2200590C1 |
| Способ направленной одноуровневой эпидуральной анестезии | 2017 |
|
RU2651129C1 |
| СПОСОБ ОЦЕНКИ ПРАВИЛЬНОСТИ ДЕЙСТВИЙ ОБУЧАЕМОГО ТРАНСФЕМОРАЛЬНОЙ АОРТОГРАФИИ С ИСПОЛЬЗОВАНИЕМ ВИРТУАЛЬНОГО КОМПЬЮТЕРНОГО ТРЕНАЖЕРА | 2012 |
|
RU2523180C1 |
| СИМУЛЯЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ БРЮШНОЙ ПОЛОСТИ C ПРИМЕНЕНИЕМ VR-СИМУЛЯЦИИ НА БАЗЕ КОМПЛЕКСНОЙ ТЕХНОЛОГИИ ТАКТИЛЬНОГО ТРЕКИНГА | 2022 |
|
RU2798405C1 |
| СПОСОБ ПЕРИОПЕРАЦИОННОЙ АНАЛЬГЕЗИИ ПРИ ВИДЕОАССИСТИРОВАННОЙ БРЮШНО-ПРОМЕЖНОСТНОЙ ЭКСТИРПАЦИИ ПРЯМОЙ КИШКИ | 2022 |
|
RU2780336C2 |
Изобретение относится к медицине и ветеринарии и может быть использовано для обучения и совершенствования практического навыка проведения манипуляции эпидуральной и спинномозговой пункций. Виртуальный эпидуральный симулятор, состоящий из гаптик-устройства с жестко закрепленным на нем шприцем, соединенным с пневматической системой, имеющей возможность контролируемого изменения давления в шприце для имитации эффекта попадания в эпидуральное пространство, и дисплея для визуализации виртуальной сцены, создаваемой и управляемой персональным компьютером, при этом гаптик-устройство выполнено по кинематической схеме дельта-механизма, с подвижной площадкой которого при помощи устройства крепления с имитацией павильона иглы Туохи жестко закрепляется шприц, соединенный с пневматической системой с возможностью создания и контроля заданного давления в ней, при этом дисплей снабжен тачскрином для изменения положения виртуального пациента в виртуальной сцене и расположен над гаптик-устройством, полностью закрывая его. 1 ил.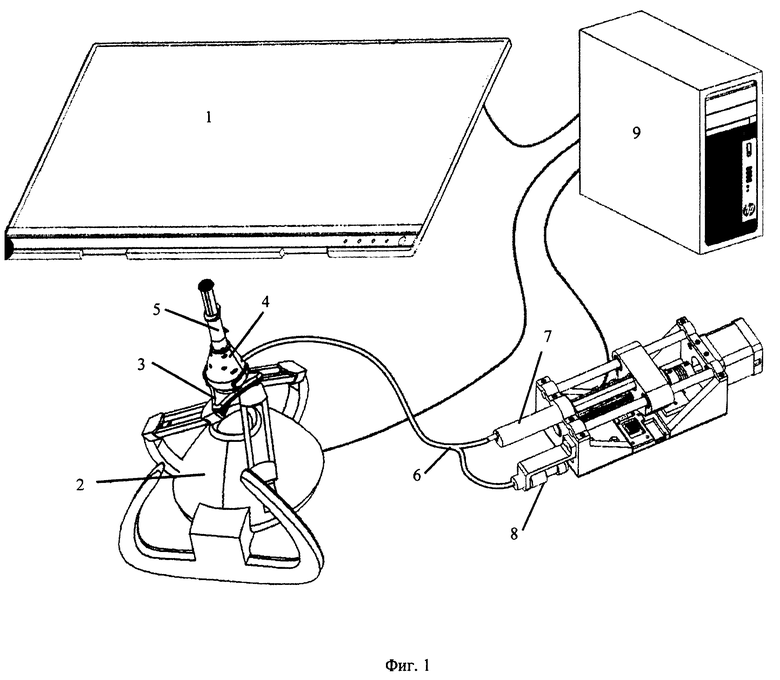
Виртуальный симулятор эпидуральной анестезии и спинномозговой пункции, состоящий из гаптик-устройства с жестко закрепленным на нем шприцем, соединенным с пневматической системой, имеющей возможность контролируемого изменения давления в шприце для имитации эффекта попадания в эпидуральное пространство, и дисплея для визуализации виртуальной сцены, которая создается и управляется при помощи персонального компьютера, отличающийся тем, что гаптик-устройство выполнено по кинематической схеме дельта-механизма, с подвижной площадкой которого при помощи устройства крепления с имитацией павильона иглы Туохи жестко закрепляется шприц, соединенный с пневматической системой с возможностью создания и контроля заданного давления в ней, при этом дисплей снабжен тачскрином для изменения положения виртуального пациента в виртуальной сцене и расположен над гаптик-устройством, полностью закрывая его.
| WO2007068050 A1, 21.06.2007 | |||
| Устройство для ориентирования отклонителей | 1986 |
|
SU1452949A1 |
| ПХЙГГССКАЙ "-in:i:.tJ''ttJ3fiAiJ&И&ЛиОТЕКА | 0 |
|
SU181001A1 |
| 0 |
|
SU160034A1 | |

