Изобретение относится к атомной энергетике и может быть использовано при изготовлении тепловыделяющих элементов (твэлов) и тепловыделяющих сборок (ТВС) на этапе определения поверхностной альфа-загрязненности, в частности, в условиях конвейерного производства ядерного топлива.
При контроле поверхностной альфа-загрязненности очень важно выдержать требуемую дистанцию между рабочей поверхностью измерительного преобразователя и поверхностью контролируемого объекта.
При контроле поверхностей сложной формы существующими датчиками достоверность контроля существенно снижается из-за локального увеличения расстояния между поверхностями датчика и объекта (оптимальная дистанция 3-5 мм).
Известен адаптивный датчик на основе чувствительного полевого прибора, содержащий структуру «металл-диэлектрик-полупроводник» с полупроводниковой подложкой и подвижным проводящим электродом на консоли, включающей слои с различными коэффициентами термического расширения, при этом на подложке на расстоянии не более ширины области пространственного заряда от края электрода расположен затвор и р-n переход для ввода электрического сигнала (Патент РФ №2511203, Заявка: 2012132613/28 от 31.07.2012. МПК: G01С 19/56 - прототип).
Недостатком известного термочувствительного полевого прибора является то, что выходной сигнал, который генерируется датчиком, зависит от неоднородного, сравнительно медленно меняющегося фона, что не позволяет обеспечить высокую чувствительность и быстродействие датчика, отсутствие возможности тонкой настройки датчика для конкретных условий, применительно к контролируемой поверхности, прямо в процессе работы.
Задача, на решение которой направлено заявляемое изобретение, состоит в создании адаптивного датчика и повышения его чувствительности, точности измерения и быстродействия.
Для решения задачи контроля альфа-загрязненности объекта сложной формы предлагается следующее решение:
- используется гибкий сцинтиллятор на основе тонкой пленки;
- применяются миниатюрные, полупроводниковые фотоэлектронные преобразователи;
- используются фотоконцентраторы в виде усеченных пирамид, которые соединены со штоками актюаторов и между собой шарнирно, могут ими поворачиваться и перемещаться линейно;
- корпуса актюаторов на шарнирах закреплены на неподвижном основании.
Решение указанной задачи достигается тем, что предложенный адаптивный датчик поверхностной альфа-загрязненности, содержащий сцинтиллятор, фотоэлектронный умножитель и основание, согласно изобретению, дополнительно снабжен управляемыми актюаторами и многостепенными шарнирными устройствами, при этом сцинтиллятор выполнен в виде гибкой и тонкой пленки, контактирующей с оптическими концентраторами, выполненными в виде усеченных пирамид, в усеченных вершинах которых размещены фотоэлектронные преобразователи на полупроводниковых структурах, предпочтительно, кремниевых, причем упомянутые оптические концентраторы, в зоне стыковки с сцинтиллятором, по углам связаны друг с другом многостепенными шарнирными устройствами, при этом между основанием датчика и шарнирными устройствами размещены управляемые актюаторы, штоки которых соединены с многостепенными шарнирами, при этом корпуса связаны шарнирно с узлами на основании, причем актюаторы оснащены датчиками положения штоков.
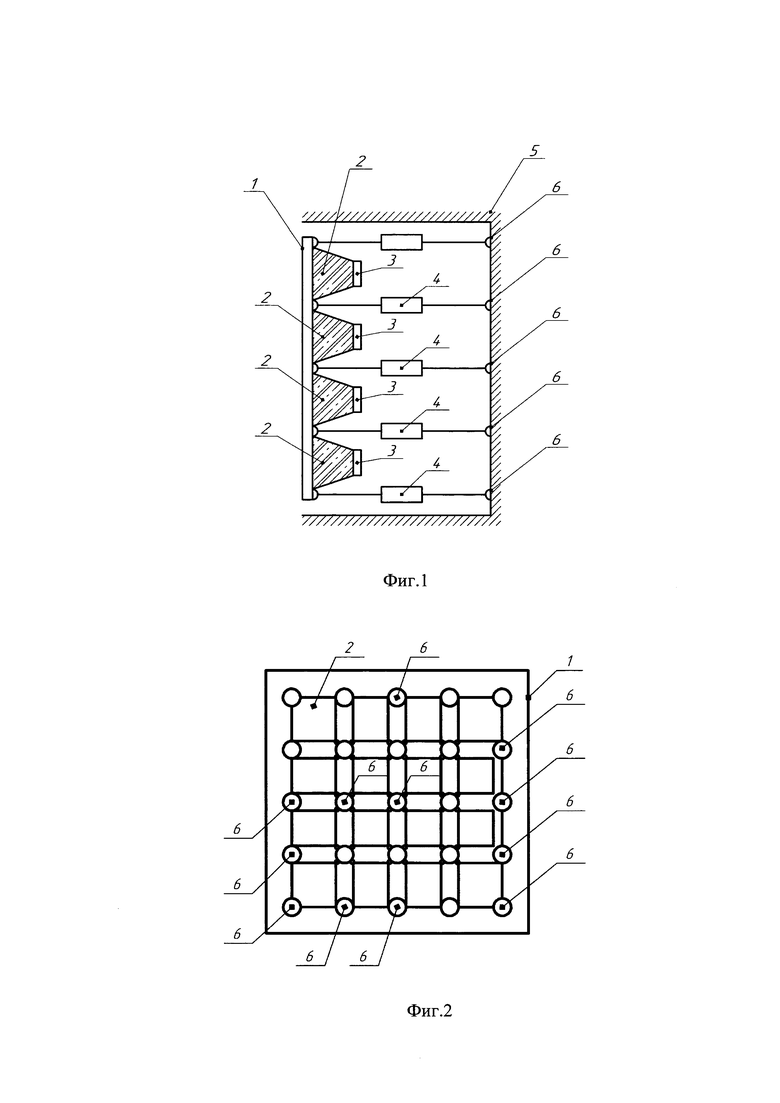
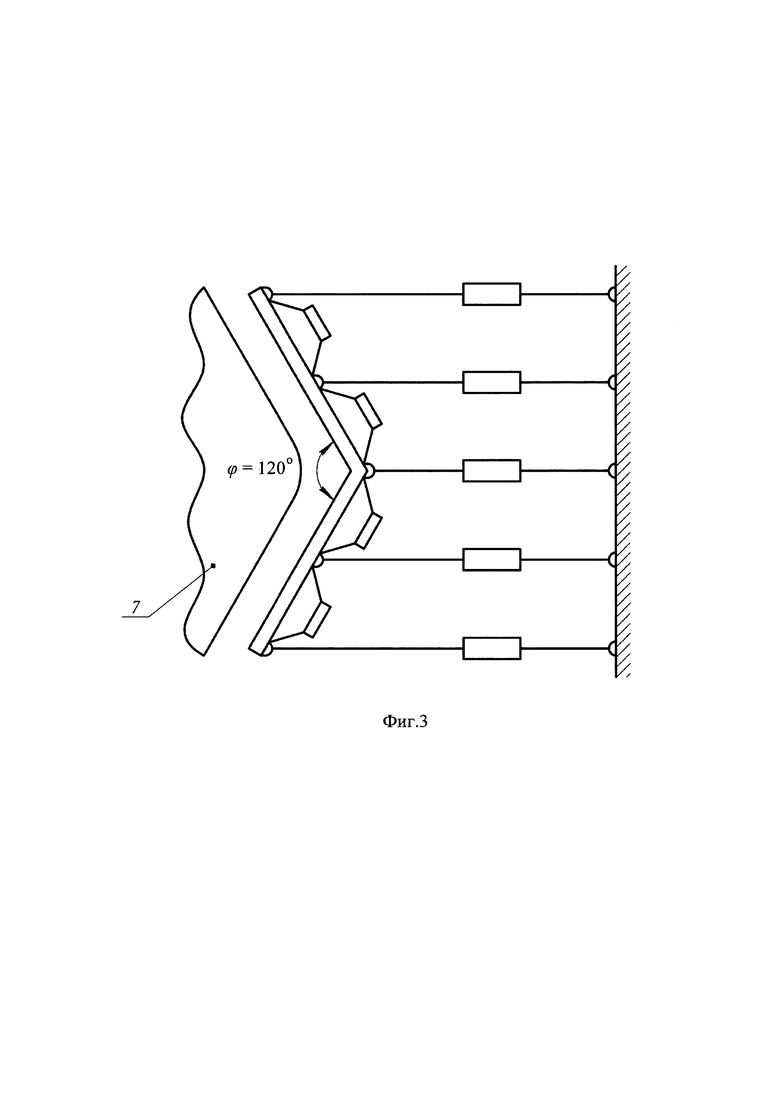
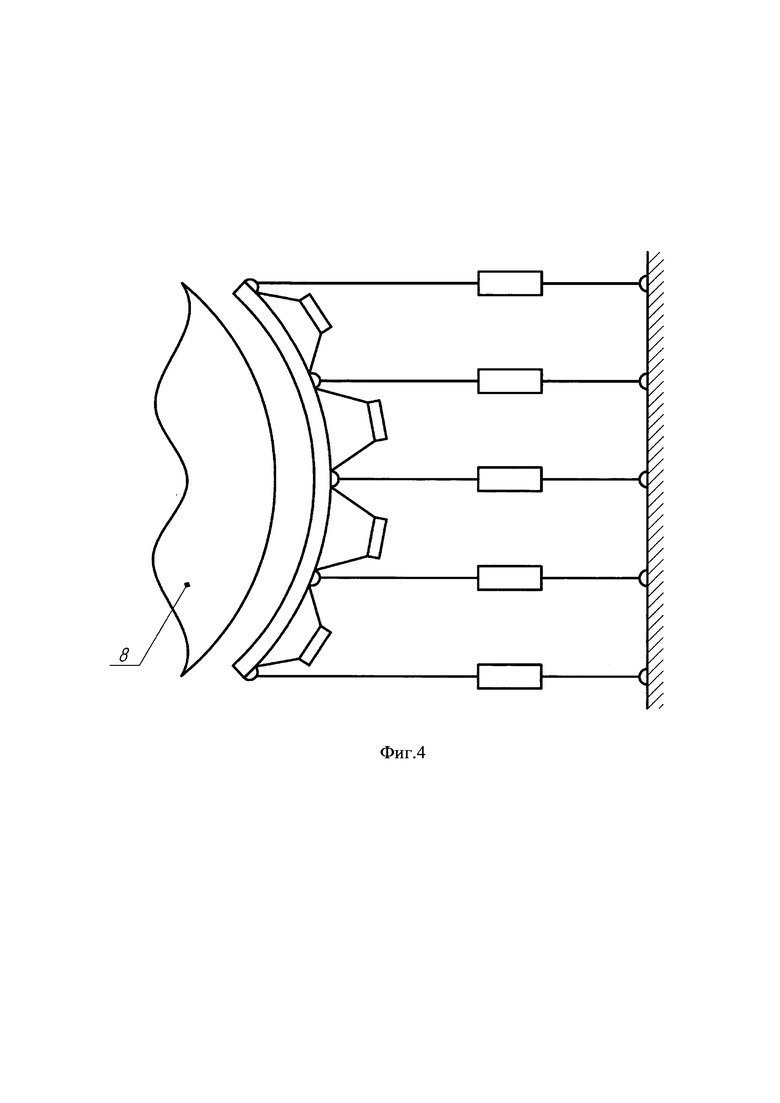
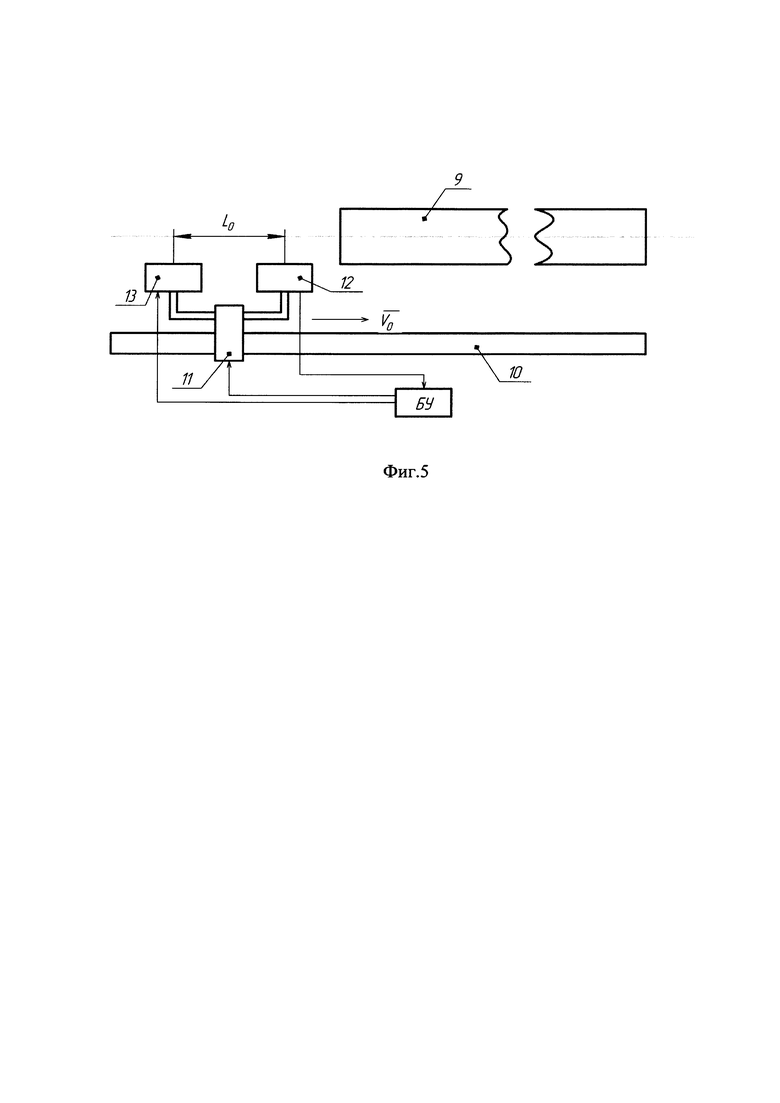
Сущность изобретения иллюстрируется чертежами, где на фиг. 1 представлена схема датчика (вид сбоку), на фиг. 2 представлена схема датчика (вид спереди), на фиг. З показана конфигурация датчика для контроля ребра чехловой трубы ТВС, на фиг. 4 представлена конфигурация датчика контроля стыковочного патрубка ТВС, на фиг. 5 показана схема возможного применения датчика.
На схемах обозначено:
1 - гибкий сцинтиллятор;
2 - фотоконцентратор;
3 - фотонный преобразователь;
4 - актюаторы;
5 - основание;
6 - узел крепления шарнира корпуса актюатора;
7 - ребро чехловой трубы ТВС (объект контроля);
8 - стыковочный патрубок ТВС цилиндрической формы (объект контроля);
9 - объект контроля;
10 - реечный механизм (направляющая);
11 - подвижная каретка;
12 - 2D-сканер;
13 - датчик альфа-излучения адаптивный;
14 - блок управления (БУ).
Адаптивный датчик поверхностной альфа-загрязненности содержит гибкий сцинтиллятор 1, фотоэлектронный умножитель и основание 5 Дополнительно снабжен управляемыми актюаторами 4 и многостепенными шарнирными устройствами 6. Сцинтиллятор 1 выполнен в виде гибкой и тонкой пленки, контактирующей с оптическими концентраторами, выполненными в виде усеченных пирамид. В усеченных вершинах которых размещены фотоэлектронные преобразователи на полупроводниковых структурах, предпочтительно, кремниевых. Оптические концентраторы, в зоне стыковки с сцинтиллятором, по углам связаны друг с другом многостепенными шарнирными устройствами 6. Между основанием датчика и шарнирными устройствами размещены управляемые актюаторы 4, штоки которых соединены с многостепенными шарнирными устройствами 6, при этом корпуса связаны шарнирно с узлами на основании, причем актюаторы оснащены датчиками положения штоков.
Предложенный датчик может быть использован следующим образом.
Гибкий тонкопленочный сцинтиллятор 1 при помощи прозрачного клея крепится к приемным окнам оптических концентраторов (фотоконцентраторов) 2, соединенных между собой шарнирными сочленениями 6, одновременно соединенными со штоками актюаторов 4.
Выходные окна оптических концентраторов соединены с входными окнами фотонных преобразователей, реализованных на кремниевых структурах (например: детектор альфа-излучения SA-20-2 Canberra Industries, США; детектор гамма-излучение R800 Coliy Technology GmbH, Германия; детектор рентгеновских лучей R10800340 VELP Scientifica, Италия).
Корпуса актюаторов шарнирно закреплены в корпусе, а положение штока каждого актюатора определяется встроенным датчиком.
Управляя актюаторами, возможно установить требуемую форму рабочей поверхности датчика, адаптированную для контроля объекта. На рисунке 3 представлена конфигурация для контроля поверхности ребра чехловой трубы ТВС 7 с прилегающими частями грани при их взаимном перемещении с заданной скоростью. 2D-сканер 12 и датчик альфа-излучения 13 размещаются на подвижной каретке 11, на расстоянии Lo друг от друга. Каретка 11 перемещается относительно объекта контроля 9 с известной скоростью  При помощи 2D-сканера 12, зона вертикального санирования которого соответствует высоте рабочего окна датчика альфа-излучения 13, формируется профилограмма поверхности объекта. По данной профилограмме, блок управления 14 формирует сигналы управления на актюаторы датчика для его конфигурирования. К моменту похода сканера к объекту контроля 9, для которого построена профилограмма, конфигурация датчика должна быть завершена.
При помощи 2D-сканера 12, зона вертикального санирования которого соответствует высоте рабочего окна датчика альфа-излучения 13, формируется профилограмма поверхности объекта. По данной профилограмме, блок управления 14 формирует сигналы управления на актюаторы датчика для его конфигурирования. К моменту похода сканера к объекту контроля 9, для которого построена профилограмма, конфигурация датчика должна быть завершена.
Таким же образом возможно построение профиля датчика для контроля поверхности объекта любой сложной формы и с последующим контролем.
Использование предложенного технического решения позволит создать адаптивный датчик поверхностной альфа-загрязненности с повышенной чувствительностью, точностью измерения и быстродействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ФИЗИЧЕСКОЙ И СНИМАЕМОЙ АЛЬФА-ЗАГРЯЗНЕННОСТИ ТВС С ЧЕХЛОВОЙ ТРУБОЙ | 2023 |
|
RU2807498C1 |
| ДЕТЕКТОР ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ | 2022 |
|
RU2795377C1 |
| ПОРТАЛЬНЫЙ РАДИАЦИОННЫЙ МОНИТОР | 2000 |
|
RU2191408C2 |
| Устройство для контроля альфа-загрязнённости твэла и средства для его калибровки | 2023 |
|
RU2807286C1 |
| ЭКРАН-ПРЕОБРАЗОВАТЕЛЬ ПРОНИКАЮЩИХ ИЗЛУЧЕНИЙ | 2005 |
|
RU2290665C1 |
| СПЕКТРОМЕТР-РАДИОМЕТР ДЛЯ ОДНОВРЕМЕННОГО АНАЛИЗА ХАРАКТЕРИСТИК СМЕШАННЫХ ПОЛЕЙ АЛЬФА-БЕТА- И ГАММА-ИЗЛУЧЕНИЙ НА ОСНОВЕ СОСТАВНОГО ДЕТЕКТОРА | 2014 |
|
RU2550313C1 |
| ЭКРАН-ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2290667C1 |
| ТОНКИЙ СЦИНТИЛЛЯЦИОННЫЙ СЧЁТЧИК | 2015 |
|
RU2599286C1 |
| УСТРОЙСТВО ДЛЯ РАДИОГРАФИИ И ТОМОГРАФИИ | 2005 |
|
RU2288465C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ РАДИОАКТИВНЫХ ВЕЩЕСТВ | 2001 |
|
RU2217777C2 |
Изобретение относится к атомной энергетике. Адаптивный датчик поверхностной альфа-загрязненности содержит гибкий сцинтиллятор на основе тонкой пленки, миниатюрные полупроводниковые фотоэлектронные преобразователи, фотоконцентраторы, выполненные в виде усеченных пирамид, соединенные со штоками актюаторов и между собой шарнирно, а также выполненные с возможностью поворота и линейного перемещения, корпуса актюаторов, связанные шарнирно с узлами на основании, при этом актюаторы оснащены датчиками положения штоков. Технический результат – повышение чувствительности, точности измерения и быстродействия датчика. 5 ил.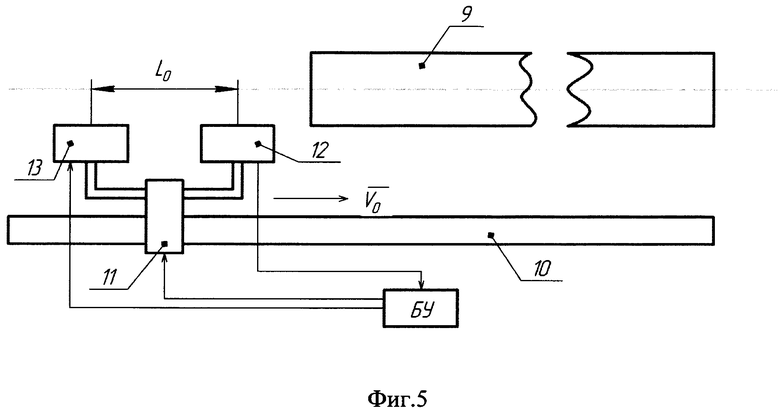
Адаптивный датчик поверхностной альфа-загрязненности, содержащий сцинтиллятор, фотоэлектронный умножитель и основание, отличающийся тем, что дополнительно снабжен управляемыми актюаторами и многостепенными шарнирными устройствами, при этом сцинтиллятор выполнен в виде гибкой и тонкой пленки, контактирующей с оптическими концентраторами, выполненными в виде усеченных пирамид, в усеченных вершинах которых размещены фотоэлектронные преобразователи на полупроводниковых структурах, предпочтительно кремниевых, причем упомянутые оптические концентраторы, в зоне стыковки с сцинтиллятором, по углам связаны друг с другом многостепенными шарнирными устройствами, при этом между основанием датчика и шарнирными устройствами размещены управляемые актюаторы, штоки которых соединены с многостепенными шарнирами, при этом корпуса связаны шарнирно с узлами на основании, причем актюаторы оснащены датчиками положения штоков.
| US 2018348380 A1, 06.12.2018 | |||
| US 2019120977 A1, 25.04.2019 | |||
| ГИБКИЙ РАДИОИЗОТОПНЫЙ УРОВНЕМЕР | 2017 |
|
RU2725669C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ СНИМАЕМОЙ АЛЬФА-ЗАГРЯЗНЕННОСТИ ТВЭЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687081C1 |
