Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к устранению шумов и, более конкретно, к системам и способам устранения шумов с использованием технологии активного шумоподавления.
Уровень техники
Снижение уровня шума часто необходимо для подавления шумов (например, нежелательных звуков, являющихся неприятными, громкими или раздражающими слух). Обычно шум можно уменьшить пассивными способами посредством, например, устранения (или частичного устранения) источника шума, блокирования распространения шума и/или предотвращения того, чтобы ухо пользователя слышало шум, или каким-либо другим подобным способом, либо с использованием комбинации таких способов. Эти способы снижения шума могут быть пассивными и плохо снижать воздействие шума в некоторых условиях (например, когда шум имеет низкочастотную составляющую ниже пороговой частоты). Недавно была принята технология активного шумоподавления (active noise reduction (ANR)) для уменьшения шумов активным способом путем генерации сигнала шумоподавления (например, сигнала с фазой инвертированной относительно фазы шума, который нужно подавить).
Раскрытие сущности изобретения
Согласно первому аспекту настоящего изобретения предложена система. Эта система может содержать первый детектор, второй детектор, процессор и громкоговоритель. Первый детектор может быть выполнен с возможностью регистрации первых шумов, поступающих к пользователю по первому пути прохождения звука, и определения первого шумового сигнала, представляющего первые шумы. Второй детектор может быть выполнен с возможностью регистрации вторых шумов, воспринимаемых пользователем, и определения второго шумового сигнала для представления вторых шумов. Процессор может быть выполнен с возможностью определения первого сигнала шумовой коррекции и второго сигнала шумовой коррекции, причем первый сигнал шумовой коррекции может быть определен на основе первого шумового сигнала, а второй сигнал шумовой коррекции может быть определен на основе второго шумового сигнала. Громкоговоритель может быть выполнен с возможностью генерирования звука на основе первого сигнала шумовой коррекции и второго сигнала шумовой коррекции, причем звук может быть передан пользователю по второму пути прохождения звука, отличному от первого пути прохождения звука.
В некоторых вариантах вторые шумы могут содержать остаточный звук во внутреннем ухе пользователя.
В некоторых вариантах первый детектор может представлять собой микрофон с воздушной проводимостью, и первый путь прохождения звука может представлять собой путь с воздушной проводимостью.
В некоторых вариантах второй детектор может представлять устройство для мониторинга нервной деятельности или устройство для мониторинга мозговых волн.
В некоторых вариантах громкоговоритель может представлять собой громкоговоритель с костной проводимостью, а второй путь звука может представлять собой путь с костной проводимостью.
В некоторых вариантах система может дополнительно содержать один или более фильтров, выполненных с возможностью разложения шумового сигнала на шумовые сигналы одного или более поддиапазонов.
В некоторых вариантах процессор может содержать аналого-цифровой преобразователь (A/D converter) и модулятор, причем модулятор может быть выполнен с возможностью выполнения амплитудной модуляции и/или фазовой модуляции.
В некоторых вариантах процедура определения первого сигнала шумовой коррекции на основе первого шумового сигнала может содержать одну или более операций. Система может определить первую передаточную функцию для первого пути прохождения звука и вторую передаточная функция для второго пути прохождения звука. На основе первой передаточной функции и второй передаточной функции может быть определен коэффициент регулирования амплитуды. Первый сигнал шумовой коррекции может быть определен на основе первого шумового сигнала и коэффициента регулирования амплитуды.
В некоторых вариантах процессор может быть дополнительно выполнен с возможностью определения первой разности во времени между звуком, прошедшим по первому пути прохождения звука, и звуком, прошедшим по второму пути прохождения звука.
В некоторых вариантах определение первой шумовой коррекции на основе первого шумового сигнала может содержать одну или более операций. Система может определить сигнал с инвертированной фазой относительно первого шумового сигнала. Первый сигнал шумовой коррекции может быть определен на основе указанной первой разности во времени и сигнала с инвертированной фазой.
В некоторых вариантах второй детектор может быть дополнительно выполнен с возможностью регистрации второй разности во времени между опорным значением и временем передачи звука по второму пути прохождения звука пользователю.
В некоторых вариантах определение первой шумовой коррекции на основе первого шумового сигнала может содержать одну или более операций. Система может определить первый сигнал шумовой коррекции на основе второй разности во времени и первого шумового сигнала.
В некоторых вариантах определение второго сигнала шумовой коррекции на основе второго шумового сигнала может содержать одну или более операций. Система может определить коэффициент регулирования амплитуды, первую разность во времени между звуковым сигналом, переданным по первому пути прохождения звука, и звуковым сигналом, переданным по второму пути прохождения звука, и сигнал с инвертированной фазой относительно второго шумового сигнала. Второй сигнал шумовой коррекции может быть определен на основе коэффициента регулирования амплитуды, первой разности во времени и сигналом с инвертированной фазой относительно второго шумового сигнала.
Согласно второму аспекту настоящего изобретения предложен способ подавления шумов для пользователя. Способ может содержать одну или более из следующих операций. Первый шумовой сигнал может быть определен посредством измерения первых шумов, поступающих к пользователю по первому пути прохождения звука и измеряемых первым детектором. Второй шумовой сигнал может быть определен посредством измерения вторых шумов, воспринимаемых пользователем и измеряемых вторым детектором. Процессор может определить первый сигнал шумовой коррекции и второй сигнал шумовой коррекции, причем первый сигнал шумовой коррекции определяют на основе первого шумового сигнала, а вторую шумовую коррекцию определяют на основе второго шумового сигнала. Громкоговоритель может генерировать звук на основе первого сигнала шумовой коррекции и второго сигнала шумовой коррекции, причем звук передают пользователю по второму пути прохождения звука, отличному от первого пути прохождения звука.
В некоторых вариантах вторые шумы могут содержать остаточный звук во внутреннем ухе пользователя.
В некоторых вариантах первый детектор может представлять собой микрофон с воздушной проводимостью, а первый путь прохождения звука может представлять собой путь с воздушной проводимостью.
В некоторых вариантах второй детектор может представлять собой устройство для мониторинга нервной деятельности или устройство для мониторинга мозговых волн.
В некоторых вариантах громкоговоритель может представлять собой громкоговоритель с костной проводимостью, а второй путь прохождения звука может представлять собой путь с костной проводимостью.
В некоторых вариантах способ может далее содержать разложение, посредством одного или более фильтров, шумового сигнала на шумовые сигналы одного или более поддиапазонов.
В некоторых вариантах процессор может содержать аналого-цифровой преобразователь и модулятор, причем модулятор может быть выполнен с возможностью выполнения амплитудной модуляции и/или фазовой модуляции.
В некоторых вариантах определение первого сигнала шумовой коррекции на основе первого шумового сигнала может содержать определение первой передаточной функции для первого пути прохождения звука и второй передаточной функции для второго пути прохождения звука. На основе первой передаточной функции и второй передаточной функции может быть определен коэффициент регулирования амплитуды. Первый сигнал шумовой коррекции может быть определен на основе первого шумового сигнала и коэффициента регулирования амплитуды.
В некоторых вариантах способ может дополнительно содержать определение процессором первой разности во времени между звуковым сигналом, поступившим по первому пути прохождения звука, и звуковым сигналом, прошедшим по второму пути прохождения звука.
В некоторых вариантах процедура определения первой шумовой коррекции на основе первого шумового сигнала может содержать определение сигнала с инвертированной фазой относительно первого шумового сигнала и определение первого сигнала шумовой коррекции на основе сигнала первой разности во времени и сигнала с инвертированной фазой.
В некоторых вариантах способ может дополнительно содержать регистрацию, вторым детектором, второй разности во времени между опорным значением и временем передачи звука по второму пути прохождения звука к пользователю.
В некоторых вариантах определение первой шумовой коррекции на основе первого шумового сигнала может содержать определение первого сигнала шумовой коррекции на основе второй разности во времени и первого шумового сигнала.
В некоторых вариантах определение второго сигнала шумовой коррекции на основе второго шумового сигнала может содержать определение коэффициента регулирования амплитуды, первой разности во времени между звуковым сигналом, переданным по первому пути прохождения звука, и звуковым сигналом, переданным по второму пути прохождения звука, и сигнала с инвертированной фазой относительно второго шумового сигнала. Второй сигнал шумовой коррекции может быть определен на основе коэффициента регулирования амплитуды, первой разности во времени и сигнала с инвертированной фазой относительно второго шумового сигнала.
Согласно третьему аспекту настоящего изобретения предложена система для подавления шумов для пользователя. Система может содержать первый детектор, второй детектор, процессор и громкоговоритель с костной проводимостью. Первый детектор может быть выполнен с возможностью измерения шумов и определения шумового сигнала для представления этих шумов. Второй детектор может быть выполнен с возможностью определения сигнала ошибки. Процессор может быть выполнен с возможностью определения сигнала шумовой коррекции на основе сигнала ошибки и шумового сигнала. Громкоговоритель с костной проводимостью может быть выполнен с возможностью генерирования звука на основе сигнала шумовой коррекции, причем звук может быть использован для подавления шумов.
В некоторых вариантах первый детектор может представлять собой микрофон с воздушной проводимостью, а шумы могут поступать к пользователю по пути с воздушной проводимостью, звук может передаваться к пользователю по пути с костной проводимостью.
В некоторых вариантах определение сигнала шумовой коррекции на основе сигнала ошибки и шумового сигнала может содержать: определение коэффициента регулирования амплитуды, соответствующего пути с воздушной проводимостью и пути с костной проводимостью; определение разности во времени между первым звуком, прошедшим по пути с воздушной проводимостью, и вторым звуком, прошедшим по пути с костной проводимостью; подстройку коэффициента регулирования амплитуды и разности во времени на основе сигнала ошибки; и определение сигнала шумовой коррекции на основе подстроенного коэффициента регулирования амплитуды, подстроенной разности во времени и шумового сигнала.
В некоторых вариантах процедура определения коэффициента регулирования амплитуды может содержать: определение первой передаточной функции для пути с воздушной проводимостью; определение второй передаточной функции для пути с костной проводимостью; и определение коэффициента регулирования амплитуды на основе первой передаточной функции и второй передаточной функции.
В некоторых вариантах процессор может содержать модулятор, выполненный с возможностью выполнения амплитудной модуляции и/или фазовой модуляции.
В некоторых вариантах второй детектор может представлять собой микрофон ошибки.
В некоторых вариантах сигнал ошибки может соответствовать суперпозиции первичного звукового поля и вторичного звукового поля, причем первичное звуковое поле может соответствовать шумам, а вторичное звуковое поле может соответствовать указанному звуку.
Согласно четвертому аспекту настоящего изобретения предложен способ подавления шумов для пользователя. Способ может содержать одну или более из следующих операций. Шумовой сигнал может быть определен посредством измерения шумов детектором. Процессор может определить сигнал шумовой коррекции на основе процедуры адаптивного регулирования и шумового сигнала. Громкоговоритель с костной проводимостью может генерировать звук на основе указанного сигнала шумовой коррекции, причем звук используется для подавления шумов.
В некоторых вариантах детектор может представлять собой микрофон с воздушной проводимостью, и шумы могут быть переданы пользователю по пути с воздушной проводимостью, звук может быть передан пользователю по пути с костной проводимостью.
В некоторых вариантах определение сигнала шумовой коррекции на основе процедуры адаптивного регулирования и шумового сигнала может содержать: определение коэффициента регулирования амплитуды, соответствующего пути с воздушной проводимостью и пути с костной проводимостью; определение разности во времени между первым звуком, переданным по пути с воздушной проводимостью, и вторым звуком, переданным по пути с костной проводимостью; подстройку коэффициента регулирования амплитуды и разности во времени на основе сигнала ошибки; и определение сигнала шумовой коррекции на основе подстроенного коэффициента регулирования амплитуды, построенной разности во времени и шумового сигнала.
В некоторых вариантах процедура определения коэффициента регулирования амплитуды может содержать: определение первой передаточной функции пути с воздушной проводимостью; определение второй передаточной функции пути с костной проводимостью; и определение коэффициента регулирования амплитуды на основе первой передаточной функции и второй передаточной функции.
В некоторых вариантах сигнал ошибки может соответствовать суперпозиции первичного звукового поля и вторичного звукового поля, причем первичное звуковое поле может соответствовать шумам, а вторичное звуковое поле может соответствовать указанному звуку.
В некоторых вариантах процессор может содержать модулятор, выполненный с возможностью амплитудной модуляции и/или фазовой модуляции.
Согласно пятому аспекту настоящего изобретения предложена система для подавления шумов для пользователя. Система может содержать детектор, процессор и громкоговоритель. Детектор может быть выполнен с возможностью генерирования шумового сигнала, причем шумовой сигнал может указывать вторые шумы, воспринимаемые пользователем, и вторые шумы могут содержать остаточный звук во внутреннем ухе пользователя. Процессор может быть выполнен с возможностью определения сигнала шумовой коррекции на основе шумового сигнала. Громкоговоритель может быть выполнен с возможностью генерирования звука на основе сигнала шумовой коррекции.
В некоторых вариантах детектор может представлять собой устройство для мониторинга нервной деятельности или устройство для мониторинга мозговых волн.
В некоторых вариантах громкоговоритель может представлять собой громкоговоритель с костной проводимостью.
Дополнительные признаки будут установлены частично в последующем описании, а частично станут понятны специалистам в рассматриваемой области после изучения последующего описания и прилагаемых чертежей, либо могут быть уяснены из опыта производства или эксплуатации примеров. Признаки настоящего изобретения могут быть реализованы и достигнуты посредством практического осуществления или использования различных аспектов способов, инструментария и комбинаций, устанавливаемых в подробном описании примеров, обсуждаемых ниже.
Краткое описание чертежей
Настоящее изобретение далее описано в терминах примеров вариантов. Эти примеры вариантов рассмотрены подробно со ссылками на чертежи. Чертежи выполнены не в масштабе. Эти варианты являются неограничивающими примерами, в которых сходные цифровые позиционные обозначения присвоены аналогичным структурам на нескольких видах чертежей. На этих чертежах:
Фиг.1 представляет упрощенную схему, иллюстрирующую пример системы устранения шумов, согласно некоторым вариантам настоящего изобретения;
Фиг. 2A представляет упрощенную схему, иллюстрирующую пример анатомии уха пользователя;
Фиг. 2B представляет упрощенную схему, иллюстрирующую пример пути с воздушной проводимостью и пример пути с костной проводимостью, согласно некоторым вариантам настоящего изобретения;
Фиг. 3A представляет логическую схему, иллюстрирующую пример процедуры активного подавления шумов, согласно некоторым вариантам настоящего изобретения;
Фиг. 3B представляет логическую схему, иллюстрирующую пример процедуры активного подавления шумов, согласно некоторым вариантам настоящего изобретения;
Фиг. 4 представляет упрощенную диаграмму, иллюстрирующую пример шумового сигнала и пример сигнала шумовой коррекции, согласно некоторым вариантам настоящего изобретения;
Фиг. 5 представляет упрощенную схему, иллюстрирующую пример системы устранения шумов, согласно некоторым вариантам настоящего изобретения;
Фиг. 6 представляет упрощенную схему, иллюстрирующую пример системы устранения шумов, согласно некоторым вариантам настоящего изобретения;
Фиг. 7 представляет упрощенную схему, иллюстрирующую пример системы устранения шумов, согласно некоторым вариантам настоящего изобретения;
Фиг. 8 представляет упрощенную схему, иллюстрирующую пример устройства обработки данных, согласно некоторым вариантам настоящего изобретения;
Фиг. 9 представляет упрощенную схему, иллюстрирующую пример устройства обработки данных, согласно некоторым вариантам настоящего изобретения;
Фиг. 10 представляет упрощенную схему, иллюстрирующую пример устройства обработки данных, согласно некоторым вариантам настоящего изобретения;
Фиг. 11 представляет упрощенную схему, иллюстрирующую пример устройства обработки данных, согласно некоторым вариантам настоящего изобретения;
Фиг. 12 представляет упрощенную схему, иллюстрирующую пример устройства обработки данных, согласно некоторым вариантам настоящего изобретения; и
Фиг. 13 представляет упрощенную схему, иллюстрирующую пример устройства обработки данных, согласно некоторым вариантам настоящего изобретения.
Осуществление изобретения
В последующем подробном описании приведены посредством примеров многочисленные конкретные подробности с целью обеспечить полное понимание соответствующих элементов изобретения. Однако для специалистов в рассматриваемой области должно быть очевидно, что настоящее изобретение можно практически реализовать и без таких подробностей. В других случаях, хорошо известные способы, процедуры, системы, компоненты и/или схемы были описаны на относительно высоком уровне, без подробностей, чтобы избежать ненужного затемнения аспектов настоящего изобретения. Разнообразные модификации описываемых здесь вариантов будут сразу понятны специалистам в рассматриваемой области, а общие принципы, формулируемые здесь, могут быть применены к другим вариантам и приложениям, не отклоняясь от смысла и объема настоящего изобретения. Таким образом, настоящее изобретение не исчерпывается показанными здесь вариантами, а наоборот, должно соответствовать широчайшему объему, согласованному с Формулой изобретения.
Следует понимать, что термины «система», «машина», «единица», «модуль» и/или «блок», используемые здесь, представляют всего лишь один из способов различения разных компонентов, элементов, частей, секций или узлов разных уровней в порядке возрастания. Однако эти термины могут быть заменены другими выражениями, если этим может быть достигнута та же самая цель.
Следует понимать, что когда про единицу, агрегат, модуль или блок написано, что этот объект находится «на», «соединен с» или «связан с» другой единицей, агрегатом, модулем или блоком, это означает, что этот объект может быть непосредственно на, соединен с или связан с указанной другой единицей, агрегатом, модулем или блоком, либо может присутствовать промежуточная единица, агрегат, модуль или блок, если только контекст четко не указывает иное. Как используется здесь, термин «и/или» охватывает любые и все комбинации ассоциированных перечисленных объектов.
Терминология, используемая здесь, предназначена только для целей описания конкретных примеров вариантов и не имеет намерений что-то ограничивать. Как используется здесь, формы единственного числа «некий», «какой-то» или «этот», «упомянутый» могут иметь намерение охватывать также множественное число, если только контекст четко не указывает иное. Должно быть далее понятно, что термины «содержат», «содержит» и/или «содержащий», «включают (в себя)», «включает» и/или «включающий», когда они используются в настоящем описании, специфицируют присутствие указанных в соответствующем месте признаков, штук, этапов, операций, элементов и/или компонентов, но не препятствуют присутствию или добавлению одного или нескольких других признаков, штук, этапов, операций, элементов, компонентов и/или групп таких объектов.
Пространственные и функциональные соотношения между элементами (например, между слоями) описаны с использованием различных терминов, включая «соединенный», «сцепленный», «сопряженный» или «взаимодействующий», и «связанный». Если только при описании соотношения между первым и вторым элементами явно не указано «напрямую» или «непосредственно», такое соотношение охватывает как прямое или непосредственное соотношение, когда между первым и вторым элементами нет никаких других промежуточных элементов, так и непрямое соотношение, когда между первым и вторым элементами присутствуют (пространственно или функционально) один или несколько промежуточных элементов. В отличие от этого, когда про элемент указано, что он «напрямую» (или «непосредственно») соединен, сцеплен, сопряжен или связан с каким-либо другим элементом, между этими элементами нет никаких промежуточных элементов. В дополнение к этому, пространственное и функциональное соотношение между элементами может быть достигнуто различными способами. Например, механическое соединение между элементами может представлять собой сварное соединение, шпоночное соединение, штифтовое соединение, соединение по посадке с натягом или другое подобное соединение, либо какую-либо комбинацию таких соединений. Другие слова для описания соотношений между элементами следует интерпретировать аналогичным образом (например, «между» в сравнении с «непосредственно между», «смежный» в сравнении с «непосредственно смежный» и т.п.).
Один из аспектов настоящего изобретения относится к системе для устранения шумов. Такая система для устранения шумов может содержать устройство обработки данных, детектор и громкоговоритель с костной проводимостью. Детектор может быть конфигурирован для генерации шумового сигнала. Этот шумовой сигнал может быть представлением первичных шумов (например, окружающих звуков) или остаточных шумов (например, шумов, принимаемых улиткой пользователя). Устройство обработки данных может быть конфигурировано для определения сигнала шумовой коррекции на основе шумового сигнала. Громкоговоритель с костной проводимостью может быть конфигурирован для генерации шумоподавляющего звука на основе сигнала шумовой коррекции для уменьшения или полного устранения шумов.
Согласно некоторым вариантам настоящего изобретения, система может уменьшить шумы с использованием сигнала шумовой коррекции, определяемого с использованием пути прямой передачи для управления шумами, путь обратной передачи для управления шумами, или путь гибридного управления шумами. Сигнал шумовой коррекции может быть определен посредством осуществления фазовой модуляции и/или амплитудной модуляции шумового сигнала. В некоторых вариантах, фазовая модуляция и/или амплитудная модуляция могут осуществляться с учетом одного или нескольких факторов, включая, например, характеристики передачи звука по разным путям передачи и/или через разные среды передачи звука, индивидуальные различия или другие подобные факторы, либо их комбинации. Это может усилить эффект подавления шумов и создать хорошее восприятие для пользователя.
В дополнение к этому, в некоторых вариантах, система управления шумами, описываемая здесь может быть использована в головном телефоне открытой конструкции. Шумоподавляющий звук, излучаемый громкоговорителем с костной проводимостью, может быть передан пользователю и воспринят им по пути с костной проводимостью. На пути с костной проводимостью, звук (например, шумоподавляющий звук) может быть преобразован в механические колебания на разных частотах и передан через кости черепа, костный лабиринт, лимфоидную жидкость внутреннего уха, спиральный орган, слуховой нерв, слуховой центр пользователя или какую-либо комбинации перечисленных объектов. В случаях, когда уши пользователя открыты или частично открыты, активное шумоподавление может быть достигнуто с использованием костной проводимости. По сравнению с традиционными головными телефонами с воздушной проводимостью, использующими закрытую конструкцию для снижения шумов, головные телефоны открытой конструкции могут быть более комфортабельны для ушей и улучшить восприятие для пользователя.
Последующее описание разработано для того, чтобы помочь лучшему пониманию способов и/или систем снижения шумов. Термин «шум» или «шумы», используемый в настоящем изобретении, может обозначать нежелательный звук, признанный неприятным, слишком громким или раздражающим слух. Этот шум может быть широкополосным шумом (например, импульсный шум ружейного выстрела) или узкополосным шумом (например, шум, создаваемый автомобильным двигателем внутреннего сгорания). Термин «шумовой сигнал», используемый в настоящем изобретении, может обозначать сигнал, который генерирует электрическое устройство (например, детектор) и который может представлять шумы. Это не имеет целью ограничить объем настоящего изобретения. Даже рядовые специалисты в рассматриваемой области смогут создать определенное количество вариаций, изменений и/или модификаций в соответствии с положениями настоящего изобретения. Эти вариации, изменения и/или модификации не отклоняются от объема настоящего изобретения.
Фиг. 1 представляет упрощенную схему, иллюстрирующую пример системы 100 устранения шумов согласно некоторым вариантам настоящего изобретения. Эта система 100 устранения шумов может быть конфигурирована для уменьшения или полного устранения шумов. Система 100 устранения шумов может быть применена в различных областях и/или устройствах, таких как носимое устройство (например, головные телефоны с подавлением шумов, головные телефоны с костной проводимостью), медицинское устройство (например, устройство для помощи дыханию, устройство с положительным непрерывным давлением в воздухоносных путях (Continuous Positive Airway Pressure (CPAP))), глушитель, устройство против храпа или другое подобное устройство, или какую-либо комбинацию этих устройств. В некоторых вариантах, система 100 устранения шумов может представлять собой систему устранения шумов с открытыми шумами, используемую в головных телефонах открытой конструкции. Как используется здесь, под головными телефонами открытой конструкции понимают головные телефоны, сконструированные так, чтобы позволить некоторой доле внешних шумов (например, окружающему звуку) смешиваться с выходным звуком головных телефонов (например, музыкой).
В некоторых вариантах, система 100 устранения шумов может представлять собой систему активного устранения шумов с целью уменьшения или полного подавления шумов (например, нежелательного звука). Система активного устранения шумов может содержать электроакустическую или электромеханическую подсистему, которая нейтрализует шумы на основе принципа суперпозиции. Например, уменьшение или полное подавление шумов может быть осуществлено посредством генерации системой 100 устранения шумов шумоподавляющего звука, имеющего такую же амплитуду, как шумы, и фазу, противоположную фазе шумов, и комбинирования этого звука с шумами. Этот шумоподавляющий звук может быть определен на основе сигнала шумовой коррекции для уменьшения шумов и шумового сигнала, представляющего шумы.
Система 100 устранения шумов может представлять собой систему прямой передачи для управления шумами, систему обратной передачи для управления шумами или систему гибридного управления шумами. Один или несколько компонентов системы прямой передачи для управления шумами могут составлять путь прямой передачи для управления шумами. Сигналы (например, шумовой сигнал прямой передачи, сигнал шумовой коррекции прямой передачи) могут быть переданы по пути прямой передачи для управления шумами. Один или несколько компонентов системы обратной передачи для управления шумами могут составлять путь обратной передачи для управления шумами. По этому пути обратной передачи для управления шумами могут быть переданы сигналы (например, шумовой сигнал обратной передачи, сигнал шумовой коррекции обратной передачи).
В одном из примеров системы прямой передачи для управления шумами, детектор прямой передачи (например, микрофон) может быть помещен вне головной гарнитуры для определения шумового сигнала прямой передачи на пути прямой передачи для управления шумами. Шумовой сигнал прямой передачи может представлять собой первичный шумовой сигнал. Этот первичный шумовой сигнал может являться представлением первичных шумов, таких как окружающие шумы. Система прямой передачи для управления шумами может быть конфигурирована для определения первичного сигнала шумовой коррекции (или называемого сигналом шумовой коррекции прямой передачи) на основе шумового сигнала прямой передачи.
В одном из примеров системы обратной передачи для управления шумами, детектор обратной передачи (например, микрофон ошибки) может быть расположен внутри головной гарнитуры или наушников-капель. Этот детектор обратной передачи может генерировать шумовой сигнал обратной передачи посредством измерения шумов обратной передачи в ухе пользователя (например, шумов, принимаемых внутренним ухом пользователя). Система обратной передачи для управления шумами может быть конфигурирована для определения сигнала шумовой коррекции обратной передачи на основе шумового сигнала обратной передачи. Например, шумовой сигнал обратной передачи может являться остаточным шумовым сигналом, представляющим остаточный шум. Сигнал шумовой коррекции обратной передачи может также называться остаточным сигналом шумовой коррекции.
Пример системы гибридного управления шумами может использовать детектор прямой передачи и детектор обратной передачи. Система гибридного управления шумами может быть конфигурирована для определения сигнала шумовой коррекции на основе обоих сигналов – шумового сигнала прямой передачи, генерируемого детектором прямой передачи, и шумового сигнала обратной передачи, генерируемого детектором обратной передачи. Эта система гибридного управления шумами может содержать оба пути – путь прямой передачи для управления шумами и путь обратной передачи для управления шумами, как отмечено выше. Основная часть шумов (например, окружающих шумов) может быть уменьшена или полностью подавлена посредством пути прямой передачи для управления шумами. Этот путь обратной передачи для управления шумами может быть использован для мониторинга остаточных шумов, либо для уменьшения или полного подавления остаточных шумов.
Как используется здесь, термин «устранение шумов» может включать любой тип и/или охват управления, подстройки или регулирования любого параметра шумов (например, тона, громкости (или амплитуды или интенсивности), качества и/или фазы), такого как полное или частичное снижение шумов, подавление, регулирование или сглаживание шумов, например.
Как показано на Фиг. 1, система 100 устранения шумов может содержать устройство 110 обработки данных, детектор 120, громкоговоритель 130, запоминающее устройство 140, устройство 150 связи, устройство 160 ввода/вывода (I/O) и источник 170 питания. В некоторых вариантах, два или несколько компонентов системы 100 устранения шумов могут быть соединены и/или осуществлять связь одни с другими. Например, устройство I/O 160 и запоминающее устройство 140 могут быть электрически соединены с устройством 150 связи. В качестве другого примера, громкоговоритель 130 может осуществлять связь с устройством 110 обработки данных через устройство 150 связи или сеть 180 связи. Как используется здесь, соединение между двумя компонентами может представлять собой беспроводное соединение, проводное соединение, какое-либо другое соединение связи, которое может позволить передавать и/или принимать данные, и/или какую-либо комбинацию перечисленных соединений. Беспроводное соединение может представлять собой, например, линию Bluetooth™, линию Wi-Fi™, линию WiMax™, линию сети WLAN, линию ZigBee, линию сети мобильной связи (например, поколений 3G, 4G, 5G и т.д.), или другую подобную линию, либо комбинацию таких линий. Проводное соединение может представлять собой, например, коаксиальный кабель, кабель связи (например, телекоммуникационный кабель), гибкий кабель, спиральный кабель, кабель в неметаллической оболочке, кабель в металлической оболочке, многожильный кабель, кабель типа витая пара, ленточный кабель, экранированный кабель, двухжильный кабель, волоконный световод, электрический кабель, оптический кабель, телефонный провод или другой подобный кабель, либо какую-то другую комбинацию перечисленных кабелей.
Устройство 110 обработки данных может быть конфигурировано для обработки данных. Эти данные могут представлять собой звуковой сигнал (например, шумовой сигнал и речевой сигнал), информацию относительно характеристик человека (например, плотность костей), информацию относительно окружающей среды (например, температуру) или другую подобную информацию, либо какую-то комбинацию перечисленного. Эти данные могут быть получены детектором 120, либо извлечены из другого источника (например, запоминающего устройства 140). Например, указанные данные могут содержать один или несколько шумовых сигналов, получаемых детектором 120. На основе этих данных, устройство 110 обработки данных может быть конфигурировано для определения характеристик пользователя, распознавания шумов, распознавания речи, осуществления операции уменьшения шумов, генерации сигнала управления, осуществления аналого-цифрового преобразования, осуществления цифро-аналогового преобразования, преобразования сигнала между временной областью и частотной областью, разбиения сигнала на несколько сигналов поддиапазонов с разными частотными диапазонами или другой подобной обработки, либо какой-то комбинации перечисленных видов обработки.
В некоторых вариантах, устройство 110 обработки данных может быть конфигурировано для определения сигнала шумовой коррекции на основе шумового сигнала. Этот шумовой сигнал может быть представлением шумов. Шумы могут представлять собой первичные шумы, остаточные шумы или другие подобные шумы, либо какую-то комбинацию перечисленных шумов. Источник шумов может относиться или не относиться к системе 100 устранения шумов. Сигнал шумовой коррекции может быть использован для определения шумоподавляющего звука с целью уменьшения или полного подавления шумов. Например, шумоподавляющий звук может иметь такую же амплитуду, но быть инвертированным по фазе, (быть в так называемой противофазе) относительно шумов, как показано на Фиг. 4. Сигнал шумовой коррекции может быть цифровым сигналом или аналоговым сигналом. Этот сигнал шумовой коррекции может быть сигналом временной области или сигналом частотной области. Сигнал шумовой коррекции может быть широкополосным сигналом или узкополосным сигналом. В некоторых вариантах, сигнал шумовой коррекции может содержать несколько сигналов шумовой коррекции по поддиапазонам. Устройство 110 обработки данных может передавать сигнал шумовой коррекции на выход в любой форме, например, в форме сигнала с широтно-импульсной модуляцией (pulse width modulation (PWM)), цифрового сигнала или аналогового сигнала. В некоторых вариантах, сигнал шумовой коррекции может содержать несколько сигналов, а устройство 110 обработки данных может передавать на выход сигнал, являющийся комбинацией этих сигналов, либо передавать на выход эти сигналы соответственно или параллельно.
В некоторых вариантах, устройство 110 обработки данных может содержать процессор сигнала (например, процессор 521 сигнала прямой передачи, процессор 522 сигнала обратной передачи, как показано на Фиг. 5 – 7), фильтр, датчик, запоминающее устройство или другой подобный компонент, либо какую-то комбинацию таких компонентов. Например, устройство 110 обработки данных может содержать один или несколько компонентов, как показано на Фиг. 8 – 13. В некоторых вариантах, устройство 110 обработки данных может представлять собой цифровой процессор сигнала (digital signal processor (DSP)). Например, такое устройство 110 обработки данных может быть выполнено на кристалле интегральной схемы (SOC), кристалле схемы Bluetooth, кристалле процессора DSP или в виде кодека с интегральными схемами (integrated circuit (IC)) процессоров DSP.
Детектор 120 может быть конфигурирован для генерации шумового сигнала. Этот шумовой сигнал может быть представлением шумов. Шумовой сигнал может быть цифровым сигналом или аналоговым сигналом. Этот шумовой сигнал может быть сигналом временной области или сигналом частотной области. Шумовой сигнал может быть широкополосным сигналом или узкополосным сигналом. Этот шумовой сигнал может быть полнодиапазонным шумовым сигналом или шумовым сигналом поддиапазона. В некоторых вариантах, шумовой сигнал может содержать несколько шумовых сигналов поддиапазонов. В некоторых вариантах, шумовой сигнал может быть шумовым сигналом прямой передачи, соответствующим пути прямой передачи для управления шумами, или шумовым сигналом обратной передачи, соответствующим пути обратной передачи для управления шумами.
Шумовой сигнал может быть измерен на основе физического, химического и/или биологического эффекта. Например, шумы могут быть преобразованы в измеримую физическую величину (например, электрическое напряжение, электрический ток, электрический заряд, электрическое сопротивление, напряженность магнитного поля), и эта измеримая физическая величина может быть преобразована в шумовой сигнал в форме электрического сигнала. В качестве другого примера, шумы могут быть преобразованы в измеримую химическую или биологическую величину, и уже эта химическая или биологическая величина может быть преобразована в шумовой сигнал в форме электрического сигнала.
Детектор 120 может генерировать шумовой сигнал посредством приема и измерения шумов прямо или непрямо. Например, детектор 120 может генерировать шумовой сигнал на основе механических вибраций шумов. В качестве другого примера, детектор 120 может генерировать шумовой сигнал через промежуточную величину (например, мозговые волны), соответствующую шумам.
В некоторых вариантах, шумовой сигнал, генерируемый детектором 120, может представлять собой первичный шумовой сигнал. Этот первичный шумовой сигнал может быть представлением первичных шумов (например, окружающих шумов). Первичный шумовой сигнал может быть обработан на пути прямой передачи для управления шумами в качестве шумового сигнала прямой передачи. В дополнение к этому или в качестве альтернативы, шумовой сигнал может содержать остаточный шумовой сигнал. Этот остаточный шумовой сигнал может быть представлением остаточных шумов. Остаточный шумовой сигнал может быть обработан на пути обратной передачи для управления шумами в качестве шумового сигнала обратной передачи.
В некоторых вариантах, детектор 120 может быть конфигурирован для оценки эффекта уменьшения шумов. Оценка эффекта уменьшения шумов может быть произведена на основе одного или нескольких параметров, например, интенсивности остаточных шумов, разности между опорным значением и временем прохождения звука по пути с костной проводимостью у пользователя. В некоторых вариантах, детектор 120 может представлять собой детекторную матрицу, содержащую множество детекторов, которые могут быть расположены, например, в линейной конфигурации, в планарной конфигурации, в цилиндрической конфигурации или в сферической конфигурации.
Детектор 120 может содержать акустоэлектрический преобразователь, фотоэлектрический преобразователь, электрохимический датчик, устройство для мониторинга нервной деятельности, устройство для мониторинга мозговых волн или другое подобное устройство, либо какую-то комбинацию таких устройств. Например, детектор 120 может содержать акселерометр для восприятия и измерения вибраций, ассоциированных с шумами. В качестве другого примера, детектор 120 может содержать акустоэлектрический преобразователь, например, микрофон, микрофон ошибки. К примерам микрофонов могут относиться ленточный микрофон, микрофон на основе микро электромеханической системы (Micro-Electro-Mechanical System (MEMS)), динамический микрофон, пьезоэлектрический микрофон, конденсаторный микрофон, угольный микрофон, аналоговый микрофон, цифровой микрофон или другой подобный микрофон, либо какая-то комбинация перечисленных микрофонов. Такой микрофон может быть всенаправленным микрофоном, однонаправленным микрофоном, двунаправленным микрофоном, микрофоном с кардиоидной диаграммой направленности или другим подобным микрофоном, либо он может представлять собой какую-то комбинацию перечисленных микрофонов. В некоторых вариантах, микрофон может быть чувствителен к звуку с конкретной частотой (такой как 20 Гц~20,000 Гц, 1000 Гц~3000 Гц, 300 Гц~3000 Гц, 20 Гц-200 Гц, и т.п.).
В некоторых вариантах, детектор 120 может содержать несколько акустоэлектрических преобразователей. Частотные характеристики этих акустоэлектрических преобразователей могут быть одинаковыми или разными. Например, детектор 120 может содержать несколько акустоэлектрических преобразователей с разными частотными характеристиками, чтобы измерять шумовые сигналы в нескольких поддиапазонах. В качестве опции, эти акустоэлектрические преобразователи могут быть расположены в любой конфигурации. Например, детектор 120 может содержать два всенаправленных микрофона, используемых в головной гарнитуре. Эти два всенаправленных микрофона могут быть помещены в разных позициях относительно рта пользователя головной гарнитуры.
В некоторых вариантах, детектор 120 может содержать устройство для биологического мониторинга (например, нейромедиаторный датчик, устройство для мониторинга нервной деятельности, устройство для мониторинга электроэнцефалограмм). Устройство для биологического мониторинга может быть конфигурировано для определения шумового сигнала, представляющего шумы, воспринимаемые пользователем, посредством мониторинга одной или нескольких биологических характеристик пользователя. Например, шумы, воспринимаемые пользователем, могут представлять собой остаточные шумы. Контролируемой биологической характеристикой (ами) пользователя могут быть мозговые волны, температура тела, активность нейронов или другая подобная характеристика пользователя, либо какая-то комбинация этих характеристик. В некоторых вариантах, устройство для биологического мониторинга может быть конфигурировано для определения разности во времени между опорным значением и временем прохождения звука по пути с костной проводимостью у пользователя. Указанное опорное значение может быть предварительно заданным значением. В некоторых вариантах, детектор 120 может представлять собой звуковой датчик 510 или детектор 530 сигнала обратной передачи, как показано на Фиг. 5 – 7.
Громкоговоритель 130 может быть конфигурирован для генерации звука на основе звукового сигнала. Громкоговоритель 130 может содержать один или несколько громкоговорителей с костной проводимостью, громкоговорителей с воздушной проводимостью или других подобных устройств, либо комбинацию таких устройств. В некоторых вариантах, громкоговоритель 130 может представлять собой громкоговоритель с костной проводимостью. Например, такой громкоговоритель с костной проводимостью может содержать вибрационную пластину и преобразователь. Этот преобразователь может быть конфигурирован для генерации вибраций посредством, например, преобразования электрического сигнала в механические колебания. Преобразователь может возбуждать вибрационную пластину, чтобы она вибрировала. Просто в качестве примера, вибрационная пластина может быть соединена с преобразователем и вибрировать вместе с этим преобразователем. Вибрационная пластина может касаться кожи пользователя и передавать вибрацию слуховым нервам через человеческие ткани и кости, что в свою очередь может позволить пользователю слышать звук. В некоторых вариантах, громкоговоритель с костной проводимостью может генерировать шумоподавляющий звук на основе сигнала шумовой коррекции. Этот сигнал шумовой коррекции может быть определен устройством 110 обработки данных или вызван из другого источника (например, из запоминающего устройства 140). Шумоподавляющий звук может быть конфигурирован для уменьшения или полного подавления шумов на основе деструктивной интерференции между шумоподавляющим звуком и шумами. В некоторых вариантах, система 100 устранения шумов может содержать несколько громкоговорителей 130, которые могут быть расположены, например, в форме линейной решетки, планарной решетки, цилиндрической решетки или сферической решетки.
Запоминающее устройство 140 может сохранять данные и/или команды. В некоторых вариантах, это запоминающее устройство 140 может сохранять данные, полученные от детектора 120 и/или устройства 110 обработки данных. В некоторых вариантах, запоминающее устройство 140 может сохранять данные и/или команды, которые система 100 устранения шумов может выполнять или использовать для осуществления примеров способов, описываемых в настоящем изобретении. В некоторых вариантах, запоминающее устройство 140 может представлять собой запоминающее устройство большой емкости, съемное запоминающее устройство, энергозависимое запоминающее устройство для чтения и записи, постоянное запоминающее устройство (ПЗУ (read-only memory (ROM))) или другое подобное устройство, либо какую-то комбинацию таких устройств. К примерам запоминающих устройств большой емкости могут относиться магнитный диск, оптический диск, твердотельный накопитель (диск) и т.п. К примерам съемных запоминающих устройств могут относиться флэшка, гибкий диск, оптический диск, карта памяти, zip-диск, накопитель на магнитной ленте и т.п. К примерам энергозависимых запоминающих устройств для чтения и записи информации может относиться запоминающее устройство с произвольной выборкой (ЗУПВ (random access memory (RAM))). К примерам ЗУПВ (RAM) могут относиться динамическое ЗУПВ (DRAM), синхронное динамическое ЗУПВ с удвоением тактовой частоты (double date rate synchronous dynamic RAM (DDR SDRAM)), статическое ЗУПВ (static RAM (SRAM)), тиристорное ЗУПВ (thyristor RAM (T-RAM)) и ЗУПВ с нулевой емкостью (zero-capacitor RAM (Z-RAM)) и т.п. К примерам ПЗУ (ROM) могут относиться ПЗУ с масочным программированием (mask ROM (MROM)), программируемое ПЗУ (programmable ROM (PROM)), стираемое программируемое ПЗУ (СППЗУ (erasable programmable ROM (EPROM))), электрически стираемое программируемое ПЗУ (ЭСППЗУ (electrically erasable programmable ROM (EEPROM))), ПЗУ на компакт-диске (compact disk ROM (CD-ROM)), и ПЗУ на цифровом универсальном диске (digital versatile disk ROM) и т.п. В некоторых вариантах, запоминающее устройство 140 может быть реализовано на облачной платформе. Просто в качестве примера, облачная платформа может представлять собой частное облако, облако общего пользования, гибридное облако, облако сообщества, распределенное облако, совместное облако, множественное облако или другое подобное облако, либо какую-то комбинацию этих типов облака.
В некоторых вариантах, запоминающее устройство 140 может быть соединено с сетью 180 для осуществления связи с одним или несколькими компонентами в системе 100 устранения шумов (например, устройством 110 обработки данных, детектором 120, громкоговорителем 130 и т.п.). Один или несколько компонентов в системе 100 устранения шумов могут обращаться к данным или командам, сохраняемым в запоминающем устройстве 140, через сеть 180 связи. В некоторых вариантах, запоминающее устройство 140 может быть напрямую соединено или осуществлять связь с одним или несколькими компонентами в системе 100 устранения шумов (например, устройством 110 обработки данных, детектором 120, громкоговорителем 130 и т.п.). В некоторых вариантах, запоминающее устройство 140 может быть частью устройства 110 обработки данных.
Устройство 150 связи может быть конфигурировано для осуществления связи с одним или несколькими компонентами системы 100 устранения шумов или с другими устройствами (например, со смартфонами). Устройство 150 связи может использовать один или несколько протоколов связи, например, Bluetooth, ZigBee, Wi-Fi, сеть сотовой связи, узкополосный Интернет вещей (NB-IoT(Narrow Band Internet of Things))/5G, 2G/3G/4G, GPRS, Z-Wave или другую подобную систему, либо какую-то комбинацию таких систем. Например, устройство 150 связи может осуществлять связь с APP, встроенным в устройство для приема сигналов управления.
Устройство I/O 160 может осуществлять ввод и/или вывод сигналов, данных, информации и т.п. В некоторых вариантах, устройство I/O 160 может позволить пользователю взаимодействовать с системой 100 устранения шумов. Например, устройство I/O 160 может быть конфигурировано для приема сигнала управления с целью управления одним или несколькими компонентами системы 100 устранения шумов. В некоторых вариантах, устройство I/O 160 может содержать устройство ввода и устройство вывода. Устройство ввода может содержать алфавитно-цифровые и другие клавиши, которые позволяют вводить данные через клавиатуру, сенсорный экран (например, с кожной или тактильной обратной связью), элементы речевого ввода, ввод путем слежения за движениями глаз, систему мониторинга за мозговой деятельностью или какой-либо другой сопоставимый механизм ввода. Введенная информация, принятая через устройство ввода, может быть передана другому компоненту (например, процессорному устройству 140) через, например, шину, для дальнейшей обработки. К другим типам устройств ввода могут относиться устройство управления курсором, такое как мышь, трекбол или направленные клавиши управления курсором и т.п. Устройство вывода может представлять собой дисплей (например, жидкокристаллический дисплей (liquid crystal display (LCD)), дисплей на основе светодиодов (light-emitting diode (LED)), дисплей с плоской панелью, криволинейный экран, телевизионное устройство, электронно-лучевую трубку (cathode ray tube (CRT)), сенсорный экран), громкоговоритель, принтер или другое подобное устройство, либо комбинацию таких устройств.
Источник 170 питания может быть конфигурирован для подачи питания одному или нескольким компонентам системы 100 устранения шумов. Например, источник 170 питания может представлять собой аккумулятор, такой как перезаряжаемый аккумулятор, отсоединяемый аккумулятор, литиевый аккумулятор или другое подобное устройство. В некоторых вариантах, система 100 устранения шумов может работать в одном или нескольких режимах. Система 100 устранения шумов может быть чувствительной к уменьшению или полному подавлению шумов, имеющих конкретную частоту в каждом из одного или нескольких режимов.
Следует отметить, что приведенные выше описания системы 100 устранения шумов предназначены служить только иллюстрациями и никак не ограничивают объем настоящего изобретения. Специалистам в рассматриваемой области будут ясны многочисленные альтернативы, модификации и вариации. Признаки, структуры, способы и другие характеристики примеров вариантов, описываемых здесь, могут быть скомбинированы различным образом, для получения дополнительных или альтернативных примеров вариантов. Например, система 100 устранения шумов может содержать один или несколько дополнительных компонентов. В дополнение или в качестве альтернативы, один или несколько компонентов системы 100 устранения шумов, описываемых выше, могут быть исключены. Например, запоминающее устройство 140 и/или устройство I/O 160 могут быть исключены. В качестве другого примера, два или более компонентов системы 100 устранения шумов могут быть интегрированы в одном компоненте. Просто в качестве примера, запоминающее устройство 140 и/или устройство I/O 160 могут быть интегрированы в устройстве 110 обработки данных. В дополнение или в качестве альтернативы, устройство 150 связи может быть интегрировано в устройство I/O 160.
На Фиг. 2A представлена упрощенная схема, иллюстрирующая пример анатомии уха 200A пользователя. Это ухо 200A может содержать ушную раковину 201, ушной канал 202, барабанную перепонку 203, цепь 204 косточек, евстахиеву трубу 205, полукружный канал 206, улитку 207 и слуховой нерв 208. Наружное ухо может содержать ушную раковину 201 и ушной канал 202. Среднее ухо может содержать барабанную перепонку 203, цепь 204 косточек и евстахиеву трубу 205. Внутреннее ухо может содержать полукружный канал 206 и улитку 207. Люди могут слышать звук через свои кости (т.е. через костную проводимость) и/или барабанные перепонки (т.е. через воздушную проводимость).
Как показано на Фиг. 2, путь 211 воздушной проводимости (air conduction (AC)) может содержать ушной канал 202, барабанную перепонку 203 и улитку 207. На пути 211 с воздушной проводимостью барабанная перепонка 203 может преобразовывать звуковые волны шумов 210 в вибрации и передавать эти вибрации улитке 207. Улитка 207 может быть соединена со слуховым нервом 208, который может передавать сигналы, соответствующие шумам 210, в мозг пользователя.
Путь 221 с костной проводимости (bone conduction (BC)) может быть образован из одной или нескольких костей пользователя, улитки 207 и устройства с костной проводимостью (например, громкоговорителя с костной проводимостью 220). На пути 221 с костной проводимостью устройство может иметь такие же или подобные функции, как барабанная перепонка 203 на пути 211 с воздушной проводимостью, как отмечено выше. Устройство с костной проводимостью может генерировать звуковые волны и преобразовывать эти звуковые волны в вибрации, которые могут быть переданы улитке 207 и приняты ею через кости (или череп) и кожу пользователя. Улитка 207 могут быть соединена со слуховым нервом 208, который может передать сигналы, соответствующие звуку, в мозг пользователя. Следует отметить, что приведенные выше описания пути 221 с костной проводимостью предназначены служить только иллюстрациями, и не ограничивают объем настоящего изобретения. Например, путь 221 с костной проводимостью может содержать челюстные кости и/или скуловые кости пользователя.
Фиг. 2B представляет упрощенную схему, иллюстрирующую пример пути 211 с воздушной проводимостью и пример пути 221 с костной проводимостью согласно некоторым вариантам настоящего изобретения. Звук может быть передан улитке 207 пользователя по пути 211 с воздушной проводимостью или пути 221 с костной проводимостью. На потери при передаче звука (sound transmission loss (STL)) могут повлиять, например, свойство (например, частота) звука и путь прохождения звука (например, передающая среда). В системе активного устранения шумов может быть необходимо учитывать потери при передаче звука по разным путям прохождения звука.
На пути 211 с воздушной проводимостью, шумы 210 (которые могут называться шумами воздушной проводимости) могут быть переданы по ушному каналу 202 улитке 207 пользователя. Интенсивность звука в составе шумов 210 может быть обозначена как  . Шумы 210 могут быть переданы барьеру, поглощены барьером или отражены барьером (например, ушной канал 202 и барабанная перепонка 203, как показано на Фиг. 2A) на пути 211 с воздушной проводимостью. Шумы 210 могут быть могут быть переданы по пути 211 с воздушной проводимостью и приняты улиткой 207 пользователя. В целях иллюстрации, шумы 210, принимаемые пользователем, могут быть обозначены как шумы A. Интенсивность звука в шумах A, принимаемых пользователем, может быть обозначена как
. Шумы 210 могут быть переданы барьеру, поглощены барьером или отражены барьером (например, ушной канал 202 и барабанная перепонка 203, как показано на Фиг. 2A) на пути 211 с воздушной проводимостью. Шумы 210 могут быть могут быть переданы по пути 211 с воздушной проводимостью и приняты улиткой 207 пользователя. В целях иллюстрации, шумы 210, принимаемые пользователем, могут быть обозначены как шумы A. Интенсивность звука в шумах A, принимаемых пользователем, может быть обозначена как  . Передаточная функция
. Передаточная функция  пути 211 с воздушной проводимостью может быть определена по Уравнению (1), приведенному ниже:
пути 211 с воздушной проводимостью может быть определена по Уравнению (1), приведенному ниже:
 (1)
(1)
На пути 221 с костной проводимостью, шумоподавляющий звук (или называемый также звуком костной проводимости) для уменьшения или подавления шумов 210 может быть передан также через одну или несколько костей 224 (например, височную кость) улитке 207 пользователя. Этот шумоподавляющий звук можно генерировать посредством громкоговорителя 223 с костной проводимостью. Шумоподавляющий звук можно передавать к барьеру, поглощать и отражать этим барьером (например, височной костью или мускулом пользователя) по пути 221 с костной проводимостью. Например, шумоподавляющий звук может быть передан вдоль пути 221 с костной проводимостью и принят улиткой 207 пользователя. Для целей иллюстрации, шумоподавляющий звук, принимаемый пользователем, может быть обозначен как шумоподавляющий звук B. Интенсивность исходного шумоподавляющего звука может быть обозначена как  . Интенсивность шумоподавляющего звука B, принятого пользователем, может быть обозначена как
. Интенсивность шумоподавляющего звука B, принятого пользователем, может быть обозначена как  . Передаточная функция
. Передаточная функция  пути 221 с костной проводимостью может быть определена согласно Уравнению (2) ниже:
пути 221 с костной проводимостью может быть определена согласно Уравнению (2) ниже:
 (2)
(2)
В некоторых вариантах, для достижения необходимой деструктивной интерференции между шумами A и шумоподавляющим звуком B, может быть необходимо обеспечить равенство интенсивности шумов A (т.е. ) и интенсивности шумоподавляющего звука B (т.е. ). В идеальном случае, передаточная функция пути 211 с воздушной проводимостью должна быть равна передаточной функции пути 221 с костной проводимостью, а интенсивность шумов 210 должна быть равна интенсивности исходного шумоподавляющего звука, интенсивность шумов A может быть равна интенсивности шумоподавляющего звука B. Однако может существовать разница между передаточными функциями пути 211 с воздушной проводимостью и пути 221 с костной проводимостью, которая приводит к разнице между интенсивностями и , даже если интенсивность равна интенсивности . В таких случаях, амплитуду шумоподавляющего звука может быть необходимо модулировать таким образом, чтобы интенсивность шумоподавляющего звука B могла быть равна интенсивности шумов A.
пути 221 с костной проводимостью, а интенсивность шумов 210 должна быть равна интенсивности исходного шумоподавляющего звука, интенсивность шумов A может быть равна интенсивности шумоподавляющего звука B. Однако может существовать разница между передаточными функциями пути 211 с воздушной проводимостью и пути 221 с костной проводимостью, которая приводит к разнице между интенсивностями и , даже если интенсивность равна интенсивности . В таких случаях, амплитуду шумоподавляющего звука может быть необходимо модулировать таким образом, чтобы интенсивность шумоподавляющего звука B могла быть равна интенсивности шумов A.
Соотношение между передаточными функциями пути 211 с воздушной проводимостью и пути 221 с костной проводимостью может быть определено в соответствии с Уравнением (3) ниже:
 , (3)
, (3)
где  называется коэффициентом регулирования амплитуды при определении шумоподавляющего звука на пути прямой передачи для управления шумами.
называется коэффициентом регулирования амплитуды при определении шумоподавляющего звука на пути прямой передачи для управления шумами.
В некоторых вариантах, с целью достижения необходимой деструктивной интерференции между шумами A и шумоподавляющим звуком B в улитке 207, устройство 110 обработки данных может осуществить операцию модуляции при генерации сигнала шумовой коррекции в соответствии с Уравнением (4) ниже:
 , (4)
, (4)
где  обозначает шумовой сигнал представляющий шумы 210, которые нужно уменьшить,
обозначает шумовой сигнал представляющий шумы 210, которые нужно уменьшить, обозначает коэффициент регулирования амплитуды,
обозначает коэффициент регулирования амплитуды,  обозначает сигнал шумовой коррекции, и
обозначает сигнал шумовой коррекции, и  обозначает сигнал, имеющий такую же амплитуду, но инвертированную фазу по сравнению с шумовым сигналом . Этот сигнал шумовой коррекции может быть использован в качестве входного сигнала для громкоговорителя 223 с костной проводимостью с целью генерации шумоподавляющего звука для уменьшения шумов 210.
обозначает сигнал, имеющий такую же амплитуду, но инвертированную фазу по сравнению с шумовым сигналом . Этот сигнал шумовой коррекции может быть использован в качестве входного сигнала для громкоговорителя 223 с костной проводимостью с целью генерации шумоподавляющего звука для уменьшения шумов 210.
В некоторых вариантах, шумовой сигнал, представляющий шумы 210 может содержать N шумовых сигналов поддиапазонов, имеющих разные частотные диапазоны. Сигнал шумовой коррекции может содержать сигналы шумовой коррекции нескольких поддиапазонов. Например, сигнал шумовой коррекции может быть представлен как  , где
, где  обозначает коэффициент регулирования амплитуды для шумового сигнала i-го поддиапазона, N обозначает счет (или число) шумовых сигналов поддиапазонов, и
обозначает коэффициент регулирования амплитуды для шумового сигнала i-го поддиапазона, N обозначает счет (или число) шумовых сигналов поддиапазонов, и  обозначает сигнал, имеющий такую же амплитуду, но инвертированную фазу по сравнению с шумовым сигналом i-го поддиапазона
обозначает сигнал, имеющий такую же амплитуду, но инвертированную фазу по сравнению с шумовым сигналом i-го поддиапазона  .
.
В некоторых вариантах, может существовать разность во времени между временем, когда шумы A передают улитке 207 по пути 211 с воздушной проводимостью, и временем, когда шумоподавляющий звук B передают в улитку 207 по пути 221 с костной проводимостью. Эта разность во времени может привести к разности фаз между шумовым сигналом  и инвертированным относительно него по фазе сигналом . Эту разность фаз может быть необходимо компенсировать с целью уменьшения или полного исключения влияния этой разности фаз на стабильность фильтра и окружающих шумов (например, высокочастотных окружающих шумов), обусловленного этой разностью фаз. Например, может быть необходимо осуществить компенсацию фазы при генерации сигнала шумовой коррекции относительно шумов 210. Фазовый сдвиг в частотной области может быть отображен в задержку во временной области. Эта компенсация фазы может быть осуществлена на основе разности
и инвертированным относительно него по фазе сигналом . Эту разность фаз может быть необходимо компенсировать с целью уменьшения или полного исключения влияния этой разности фаз на стабильность фильтра и окружающих шумов (например, высокочастотных окружающих шумов), обусловленного этой разностью фаз. Например, может быть необходимо осуществить компенсацию фазы при генерации сигнала шумовой коррекции относительно шумов 210. Фазовый сдвиг в частотной области может быть отображен в задержку во временной области. Эта компенсация фазы может быть осуществлена на основе разности  во времени между первым временем, необходимым для прохождения звука воздушной проводимости к улитке 207 по пути 211 с воздушной проводимостью, и вторым временем, необходимым для прохождения звука костной проводимости к улитке 207 по пути 221 с костной проводимостью. Например, сигнал шумовой коррекции с компенсированной фазой может быть представлен в виде
во времени между первым временем, необходимым для прохождения звука воздушной проводимости к улитке 207 по пути 211 с воздушной проводимостью, и вторым временем, необходимым для прохождения звука костной проводимости к улитке 207 по пути 221 с костной проводимостью. Например, сигнал шумовой коррекции с компенсированной фазой может быть представлен в виде  . В качестве другого примера, сигнал шумовой коррекции с компенсацией фазы может содержать сигналы шумовой коррекции нескольких поддиапазонов. Например, сигнал шумовой коррекции с компенсацией фазы может быть представлен как
. В качестве другого примера, сигнал шумовой коррекции с компенсацией фазы может содержать сигналы шумовой коррекции нескольких поддиапазонов. Например, сигнал шумовой коррекции с компенсацией фазы может быть представлен как  .
.
В некоторых вариантах, с целью достижения необходимой деструктивной интерференции между шумами A и шумоподавляющим звуком B в улитке 207, устройство 110 обработки данных может осуществлять операцию модуляции при генерации сигнала шумовой коррекции в соответствии с Уравнением (5) ниже:
 . (5)
. (5)
Для разных пользователей, плотность или размер костей черепа, длина ушного канала и/или эффективность передачи звука внутри ушей могут быть различными. Скорости передачи звука по путям с определенной проводимостью (например, по пути с костной проводимостью и/или по пути с воздушной проводимостью) могут быть различными для разных пользователей. Хотя скорость передачи звука в твердом материале велика, время передачи одного и того же звука по указанным путям прохождения звука у разных пользователей может быть по-прежнему разным. Разница во времени передачи звука может соответствовать фазовому сдвигу, который может влиять на эффект уменьшения шумов, особенно для некоторых высокочастотных узкополосных шумов. Для определения сигнала шумовой коррекции может быть введена разность  во времени. Эта разность во времени может представлять собой разность во времени между опорным значением и временем прохождения звука по пути с костной проводимостью у пользователя. Опорное значение может быть предварительно заданным значением. Предварительно заданное значение может быть определено статистическим способом или задано вручную. Разность во времени может быть определена детектором обратной передачи. Сигнал шумовой коррекции с указанной разностью во времени может представлять собой
во времени. Эта разность во времени может представлять собой разность во времени между опорным значением и временем прохождения звука по пути с костной проводимостью у пользователя. Опорное значение может быть предварительно заданным значением. Предварительно заданное значение может быть определено статистическим способом или задано вручную. Разность во времени может быть определена детектором обратной передачи. Сигнал шумовой коррекции с указанной разностью во времени может представлять собой  .
.
В некоторых вариантах, сигнал шумовой коррекции может содержать сигналы шумовой коррекции нескольких поддиапазонов. Например, сигнал шумовой коррекции с компенсацией фазы может быть представлен как  .
.
В некоторых вариантах, с целью достижения необходимой деструктивной интерференции между шумами A и шумоподавляющим звуком B в улитке 207, устройство 110 обработки данных может осуществлять операцию модуляции при генерации сигнала шумовой коррекции в соответствии с Уравнением (6) ниже:
 . (6)
. (6)
На Фиг. 3A представлена логическая схема, иллюстрирующая пример процедуры 300A активного подавления шумов, согласно некоторым вариантам настоящего изобретения. Процедура 300A может быть осуществлена одним или несколькими компонентами системы 100 устранения шумов, например, детектором 120, устройством 110 обработки данных и громкоговорителем 130.
На этапе 311, может быть сформирован шумовой сигнал в ответ на измеренные шумы, которые необходимо уменьшить. Этот шумовой сигнал может являться представлением шумов. В некоторых вариантах, восприятие и измерение шумов могут быть осуществлены детектором 120. Шумовой сигнал может представлять собой цифровой сигнал или аналоговый сигнал. Этот шумовой сигнал может представлять собой широкополосный сигнал или узкополосный сигнал. Шумовой сигнал может представлять собой полнодиапазонный шумовой сигнал, занимающий тот же самый частотный диапазон, как шумы. В качестве альтернативы, шумовой сигнал может содержать несколько шумовых сигналов поддиапазонов. Каждый из нескольких шумовых сигналов поддиапазонов может занимать поддиапазон частотного диапазона шумов. Больше информации, описывающей шумовой сигнал поддиапазона (ов), можно найти в других местах настоящего описания. См., например, Фиг. 9 и относящиеся к нему описания.
В некоторых вариантах, шумовой сигнал может являться первичным шумовым сигналом, представляющим первичные шумы (например, окружающие шумы вокруг уха пользователя). Этот первичный шумовой сигнал может представлять собой шумовой сигнал прямой передачи, соответствующий пути прямой передачи для управления шумами (который будет описан подробно в связи с Фиг. 8 – 13). Этот первичный шумовой сигнал можно генерировать посредством звукового датчика (например, звукового датчика 510, как показано на Фиг. 5 – 7). В качестве альтернативы, шумовой сигнал может являться остаточным шумовым сигналом, представляющим остаточные шумы. Остаточный шумовой сигнал может представлять собой шумовой сигнал обратной передачи, соответствующий пути обратной передачи для управления шумами (который будет подробно описан в связи с Фиг. 8 – 12). Этот остаточный шумовой сигнал можно генерировать посредством детектора сигнала обратной передачи (например, детектора 530 сигнала обратной передачи, как показано на Фиг. 5 и 6). В качестве альтернативы, шумовой сигнал может являться комбинированным сигналом, образованным в результате комбинирования первичного шумового сигнала и остаточного шумового сигнала, так что этот комбинированный сигнал представляет и первичные шумы, остаточные шумы.
На основе этапа 313, сигнал шумовой коррекции может быть определен на основе шумового сигнала.
В некоторых вариантах, определение сигнала шумовой коррекции может осуществляться устройством 110 обработки данных. Для определения этого сигнала шумовой коррекции могут быть произведены одна или несколько операций, таких как фазовая модуляция и амплитудная модуляция. В качестве опции, для определения сигнала шумовой коррекции могут быть использованы один или несколько алгоритмов. Например, для генерации сигнала шумовой коррекции могут быть использованы алгоритм минимальной среднеквадратической ошибки (Least Mean Square (LMS)), алгоритм нормированной минимальной среднеквадратической ошибки (normalized Least Mean Square (NLMS)), алгоритм фильтрованной-x минимальной среднеквадратической ошибки (Filtered-x Least Mean Square (FxLMS)), алгоритм фильтрованной-u минимальной среднеквадратической ошибки (Filtered-u Least Mean Square (FuLMS)) или другой подобный алгоритм, либо какая-то комбинация таких алгоритмов.
В некоторых вариантах, сигнал шумовой коррекции может представлять собой первичный сигнал шумовой коррекции и/или остаточный сигнал шумовой коррекции. Первичный сигнал шумовой коррекции может быть использован для уменьшения или полного подавления первичных шумов. Остаточный сигнал шумовой коррекции может быть использован для уменьшения или подавления остаточных шумов. Эти первичный сигнал шумовой коррекции и/или остаточный сигнал шумовой коррекции могут быть определены путем осуществления процедуры 300B, как показано на Фиг. 3B. В некоторых вариантах, сигнал шумовой коррекции может содержать сигналы шумовой коррекции нескольких поддиапазонов. Больше информации относительно сигналов шумовой коррекции по поддиапазонам можно найти в других местах настоящего описания. См., например, Фиг. 9 и относящееся к нему описание.
На этапе 315, громкоговоритель с костной проводимостью (например, громкоговоритель 130) может быть возбужден на основе сигнала шумовой коррекции. Например, громкоговоритель с костной проводимостью может генерировать звук костной проводимости для уменьшения или полного подавления первичных шумов и/или остаточных шумов. Звук костной проводимости может быть передан во внутреннее ухо пользователя, например, по пути с костной проводимостью (например, по пути 221 с костной проводимостью, как показано на Фиг. 2A и 2B).
Фиг. 3B представляет логическую схему, иллюстрирующую пример процедуры 300B активного подавления шумов, согласно некоторым вариантам настоящего изобретения. В некоторых вариантах, процедуру 300B может осуществлять процессор 521 сигнала прямой передачи (например, 521a, 521b, 521c, 521d, 521e или 521f) и/или a процессор 522 сигнала обратной передачи (например, 522a, 522d или 522e), как описано в других местах настоящей заявки (например, Фиг. 8 – 13 и относящиеся к ним описания).
На этапе 321, может быть принят шумовой сигнал. Этот шумовой сигнал может являться представлением первичных шумов и/или остаточных шумов. Этот шумовой сигнал может быть воспринят и измерен детектором (например, детектором 120). Шумовой сигнал может представлять собой аналоговый сигнал или цифровой сигнал. Этот шумовой сигнал может быть аналогичен тому, что описано в связи с этапом 311, показанным на Фиг. 3A, так что описание этого сигнала здесь повторено не будет.
На этапе 323, шумовой сигнал может быть преобразован в цифровой шумовой сигнал, если этот шумовой сигнал первоначально является аналоговым сигналом.
Это преобразование может быть осуществлено аналого-цифровым преобразователем, например, одним из аналого-цифровых преобразователей 810, 820 и 1370, как показано на Фиг. 8 – 10 и 12 – 13. Частота  дискретизации аналого-цифрового преобразователя может быть больше чем
дискретизации аналого-цифрового преобразователя может быть больше чем  , где
, где  обозначает максимальную частоту шумового сигнала. В некоторых вариантах, частота дискретизации может быть определена в соответствии с Формулой (7) ниже:
обозначает максимальную частоту шумового сигнала. В некоторых вариантах, частота дискретизации может быть определена в соответствии с Формулой (7) ниже:
 (7)
(7)
где k обозначает какое-либо положительное число, например, 1.5, 2.0, 2.5, 3.5, or 5.0.
На этапе 325, сигнал шумовой коррекции может быть определен на основе модуляции цифрового выходного сигнала.
В некоторых вариантах, определение сигнала шумовой коррекции может быть осуществлено устройством 110 обработки данных (например, 110A, 110B, 110C, 110D 110E или 110F) как рассмотрено выше в настоящем описании. Например, модулятор в устройстве 110 обработки данных может модулировать цифровой шумовой сигнал для определения сигнала шумовой коррекции. Эта модуляция цифрового шумового сигнала может представлять собой амплитудную модуляцию, фазовую модуляцию (например, инверсию фазы и/или фазовую компенсацию) или другую подобную модуляцию, либо комбинацию таких видов модуляции. В некоторых вариантах, такая модуляция может осуществляться на основе коэффициента регулирования фазы (например, ) и/или коэффициента регулирования амплитуды в соответствии с уравнениями (4) – (6). В некоторых вариантах, операция 323 может быть исключена, если шумовой сигнал, принятый на этапе 321 является цифровым шумовым сигналом. На этапе 325, сигнал шумовой коррекции можно генерировать посредством модуляции шумового сигнала.
На Фиг. 4 представлена упрощенная диаграмма, иллюстрирующая пример шумового сигнала 411 и пример сигнала 413 шумовой коррекции, согласно некоторым вариантам настоящего изобретения.
Как показано на Фиг. 4, сигнал 413 шумовой коррекции (например, ) может иметь такую же амплитуду, но противоположную фазу относительно шумового сигнала 411 (например, сигнала ). Как используется здесь, термин «противоположная фаза» означает, что на конкретной частоте максимальное значение сигнала 413 шумовой коррекции соответствует минимальному значению шумового сигнала 411. В идеальном случае, шумовой сигнал 411 и сигнал 413 шумовой коррекции могут нейтрализовать один другого в результате деструктивной интерференции.
Фиг. 5 представляет упрощенную схему, иллюстрирующую пример системы 500 устранения шумов согласно некоторым вариантам настоящего изобретения. Эта система 500 устранения шумов может содержать звуковой датчик 510, устройство 110 обработки данных, детектор 530 сигнала обратной передачи и громкоговоритель 540 с костной проводимостью. Устройство 110 обработки данных может содержать процессор 521 сигнала прямой передачи и процессор 522 сигнала обратной передачи. Система 500 устранения шумов может быть конфигурирована для уменьшения или полного подавления шумов. Эта система 500 устранения шумов может представлять собой пример варианта системы 100 устранения шумов.
Процессор 521 сигнала прямой передачи может создавать путь прямой передачи для управления шумами, конфигурированный для уменьшения первичных шумов 590 (например, окружающих шумов для пользователя 550). Этот звуковой датчик 510 может быть конфигурирован для восприятия и измерения первичных шумов 590 и генерации первичного шумового сигнала, представляющего первичные шумы 590. Первичный шумовой сигнал может также называться шумовым сигналом прямой передачи, соответствующим пути прямой передачи для управления шумами. В некоторых вариантах, звуковой датчик 510 может быть помещен возле ушной раковины пользователя для измерения наружных шумов, поступающих в ухо пользователя.
В некоторых вариантах, первичный шумовой сигнал может представлять собой электрический сигнал во временной области или в частотной области. Этот первичный шумовой сигнал может представлять собой полнодиапазонный первичный шумовой сигнал и/или первичный шумовой сигнал поддиапазона. В некоторых вариантах, первичный шумовой сигнал может содержать несколько первичных шумовых сигналов поддиапазонов. Например, звуковой датчик 510 может содержать один или несколько акустоэлектрических преобразователей, каждый из которых может быть конфигурирован для генерации одного или нескольких первичных шумовых сигналов поддиапазонов. В качестве другого примера, звуковой датчик 510 может генерировать полнодиапазонный первичный шумовой сигнал и разбивать этот полнодиапазонный первичный шумовой сигнал на несколько первичных шумовых сигналов поддиапазонов, занимающих разные частотные диапазоны, в соответствии с технологией разложения на поддиапазоны.
Каждый из нескольких первичных шумовых сигналов поддиапазонов может соответствовать одному поддиапазону первичных шумов. Для каждого поддиапазона первичных шумов соответствующие передаточные функции могут быть одинаковыми или разными. В системе 100 устранения шумов, первая передаточная функция для поддиапазона первичных шумов при передаче этого поддиапазона шумов через первую среду и вторая передаточная функция для того же самого поддиапазона первичных шумов при передаче этого поддиапазона шумов через вторую среду могут быть одинаковыми или различными. Для разных звуковых частот передаточные функции при прохождении по пути с воздушной проводимостью (или по пути с костной проводимостью) могут быть различными. В некоторых вариантах, передаточные функции для шумов с разными частотами (т.е. первичных сигналов разных поддиапазонов) могут быть различными. В некоторых вариантах, система 100 устранения шумов может полностью устранить или уменьшить шум на какой-то практической частоте.
Процессор 521 сигнала прямой передачи может быть конфигурирован для обработки данных, ассоциированных с путем прямой передачи для управления шумами. Например, процессор 521 сигнала прямой передачи может генерировать первичный сигнал шумовой коррекции для уменьшения первичных шумов на основе первичного шумового сигнала. Этот первичный сигнал шумовой коррекции может также называться сигналом шумовой коррекции прямой передачи. В некоторых вариантах, процессор 521 сигнала прямой передачи может содержать аналого-цифровой преобразователь, модулятор, фильтр или другой подобный компонент, либо какую-то комбинацию таких компонентов.
Первичный сигнал шумовой коррекции может быть использован в качестве входного сигнала для громкоговорителя 540 с костной проводимостью с целью определения первичного шумоподавляющего звука для уменьшения первичных шумов. Первичный шумоподавляющий звук может быть передан по пути с костной проводимостью в улитку 207 пользователя 550.
В некоторых вариантах, основная часть первичных шумов может быть уменьшена или полностью подавлена посредством первичного шумоподавляющего звука. Однако здесь могут существовать остаточные шумы вследствие, например, разницы между передаточной функцией для воздушной проводимости и передаточной функцией для костной проводимости, физиологической структуры уха пользователя или других подобных факторов. Например, пользователь 550 может воспринять и измерить остаточные шумы в качестве сигнала  . В других вариантах остаточные шумы, соответствующие одним и тем же первичным шумам, могут быть различными для разных пользователей. Это может быть следствием того факта, что для разных пользователей передаточные функции путей с воздушной проводимостью (и/или путей с костной проводимостью) могут быть различными. В таких случаях может быть нужна система уменьшения шумов с обратной передачей для уменьшения остаточных шумов.
. В других вариантах остаточные шумы, соответствующие одним и тем же первичным шумам, могут быть различными для разных пользователей. Это может быть следствием того факта, что для разных пользователей передаточные функции путей с воздушной проводимостью (и/или путей с костной проводимостью) могут быть различными. В таких случаях может быть нужна система уменьшения шумов с обратной передачей для уменьшения остаточных шумов.
Процессор 522 сигнала обратной передачи и детектор 530 сигнала обратной передачи могут образовать путь обратной передачи для управления шумами, конфигурированный для уменьшения остаточных шумов. Эти остаточные шумы могут представлять собой шумы, которые все еще существуют в улитке 207 пользователя 550 после интерференции между первичными шумами, прошедшими по пути с воздушной проводимостью, и первичным шумоподавляющим звуком, прошедшим по пути с костной проводимостью.
Детектор 530 сигнала обратной передачи может быть конфигурирован для восприятия и измерения остаточных шумов и генерации остаточного шумового сигнала, представляющего остаточные шумы. В некоторых вариантах, детектор 530 сигнала обратной передачи может представлять собой любое устройство, способное воспринимать и измерять остаточные шумы. Например, детектор 530 сигнала обратной передачи может представлять собой устройство для биологического мониторинга (например, устройство для мониторинга мозговых волн, устройство для мониторинга нервной деятельности), которое может определять и измерять остаточные шумы посредством измерения биологических характеристик пользователя.
В некоторых вариантах, остаточный шумовой сигнал может представлять собой электрический сигнал, такой как аналоговый сигнал или цифровой сигнал. В качестве опции, если остаточный шумовой сигнал является аналоговым сигналом (обозначен как  ), детектор 530 сигнала обратной передачи может быть связан с дискретизирующим модулем, конфигурированным для генерации цифрового остаточного шумового сигнала
), детектор 530 сигнала обратной передачи может быть связан с дискретизирующим модулем, конфигурированным для генерации цифрового остаточного шумового сигнала  посредством дискретизации аналогового остаточного шумового сигнала . Частота дискретизации дискретизирующего модуля может быть выше, чем
посредством дискретизации аналогового остаточного шумового сигнала . Частота дискретизации дискретизирующего модуля может быть выше, чем , где
, где  обозначает максимальную частоту аналогового остаточного шумового сигнала .
обозначает максимальную частоту аналогового остаточного шумового сигнала .
Процессор 522 сигнала обратной передачи может быть конфигурирован для обработки данных, ассоциированных с путем обратной передачи для управления шумами. Например, этот процессор 522 сигнала обратной передачи может генерировать остаточный сигнал шумовой коррекции. Этот остаточный сигнал шумовой коррекции может быть конфигурирован для уменьшения или полного подавления остаточных шумов. В некоторых вариантах, процессор 522 сигнала обратной передачи может содержать аналого-цифровой преобразователь, модулятор, фильтр или другой подобный компонент, либо комбинацию таких компонентов.
Например, этот процессор 522 сигнала обратной передачи может быть конфигурирован для определения остаточного сигнала  шумовой коррекции посредством выполнения инверсии фазы цифрового остаточного шумового сигнала
шумовой коррекции посредством выполнения инверсии фазы цифрового остаточного шумового сигнала . Остаточный сигнал шумовой коррекции может быть использован для полного подавления или уменьшения шумового сигнала посредством деструктивной интерференции.
. Остаточный сигнал шумовой коррекции может быть использован для полного подавления или уменьшения шумового сигнала посредством деструктивной интерференции.
В некоторых вариантах, остаточный сигнал шумовой коррекции может быть определен посредством осуществления операции фазовой инверсии и амплитудной модуляции остаточного шумового сигнала без выполнения фазовой компенсации. Генерация остаточного сигнала шумовой коррекции процессором 522 сигнала обратной передачи может быть осуществлена аналогично способу генерации первичного сигнала шумовой коррекции процессором 521 сигнала прямой передачи. Остаточный сигнал шумовой коррекции может представлять собой полнодиапазонный остаточный сигнал шумовой коррекции, имеющий такой же частотный диапазон, как и остаточные шумы. Например, остаточный сигнал шумовой коррекции может быть представлен как  , где
, где  обозначает коэффициент регулирования амплитуды для пути обратной передачи для управления шумами. В качестве другого примера, остаточный сигнал шумовой коррекции может содержать остаточные сигналы шумовой коррекции нескольких поддиапазонов, каждый из которых имеет частоту одного из поддиапазонов остаточных шумов. Этот остаточный сигнал шумовой коррекции может быть представлен как
обозначает коэффициент регулирования амплитуды для пути обратной передачи для управления шумами. В качестве другого примера, остаточный сигнал шумовой коррекции может содержать остаточные сигналы шумовой коррекции нескольких поддиапазонов, каждый из которых имеет частоту одного из поддиапазонов остаточных шумов. Этот остаточный сигнал шумовой коррекции может быть представлен как  , где обозначает коэффициент регулирования амплитуды для остаточного шумового сигнала i-го поддиапазона, N обозначает число поддиапазонов остаточного шумового сигнала, и обозначает сигнал, имеющий такую же амплитуду, но инвертированную (известную как противофаза) относительно остаточного шумового сигнала
, где обозначает коэффициент регулирования амплитуды для остаточного шумового сигнала i-го поддиапазона, N обозначает число поддиапазонов остаточного шумового сигнала, и обозначает сигнал, имеющий такую же амплитуду, но инвертированную (известную как противофаза) относительно остаточного шумового сигнала  i-го поддиапазона.
i-го поддиапазона.
Громкоговоритель 540 с костной проводимостью может представлять собой один из вариантов показанного на Фиг. 1 громкоговорителя 130, конфигурированный для излучения звука на основе первичного сигнала шумовой коррекции и/или остаточного сигнала шумовой коррекции. Например, громкоговоритель 540 с костной проводимостью может генерировать звук на основе комбинированного сигнала на основе первичного сигнала шумовой коррекции и остаточного сигнала шумовой коррекции. В качестве другого примера, громкоговоритель 540 с костной проводимостью может генерировать звук на основе первичного сигнала шумовой коррекции и звук на основе остаточного сигнала шумовой коррекции последовательно. Звук (и), излучаемый громкоговорителем 540 с костной проводимостью, может проходить к улитке 207 пользователя 550 по пути 221 с костной проводимостью. Первичные шумы 590 могут проходить к улитке 207 пользователя 550 по пути 211 с воздушной проводимостью. Звук (и), излучаемый громкоговорителем 540 с костной проводимостью, может интерферировать с первичными шумами 590 в улитке 207 для уменьшения или полного подавления первичных шумов 590.
На Фиг. 6 представлена упрощенная схема, иллюстрирующая пример системы 600 устранения шумов согласно некоторым вариантам настоящего изобретения. Эта система 600 устранения шумов может содержать устройство 110 обработки данных, детектор 530 сигнала обратной передачи и громкоговоритель 540 с костной проводимостью. Это устройство 110 обработки данных может содержать процессор 522 сигнала обратной передачи. Система 600 устранения шумов может представлять собой один из примеров вариантов системы 100 устранения шумов.
Детектор 530 сигнала обратной передачи может генерировать остаточный шумовой сигнал (например, , ), представляющий остаточные шумы. Этот остаточный шумовой сигнал может представлять собой электрический сигнал и быть передан процессору 522 сигнала обратной передачи для дальнейшей обработки. В некоторых вариантах, детектор 530 сигнала обратной передачи может быть конфигурирован для определения разности во времени, как рассмотрено в других местах настоящего описания (например, на Фиг. 2B и в относящемся к нему описании).
Процессор 522 сигнала обратной передачи может быть конфигурирован для генерации остаточного сигнала шумовой коррекции (например, ) на основе остаточного шумового сигнала (например, ) Например, процессор 522 сигнала обратной передачи может содержать аналого-цифровой преобразователь, модулятор, цифро-аналоговый (D/A) преобразователь или другие подобные компоненты, либо какую-то комбинацию этих компонентов. Аналого-цифровой преобразователь процессора 522 сигнала обратной передачи может быть конфигурирован для преобразования аналогового остаточного шумового сигнала в цифровой остаточный шумовой сигнал . Частота дискретизации аналого-цифрового преобразователя может быть больше чем удвоенная максимальная частота аналогового остаточного шумового сигнала . Модулятор может быть конфигурирован для осуществления инверсии фазы цифрового остаточного шумового сигнала для генерации остаточного сигнала шумовой коррекции. В некоторых вариантах, процессор 522 сигнала обратной передачи может определить остаточный сигнал шумовой коррекции на основе цифрового остаточного шумового сигнала и параметра . Цифро-аналоговый преобразователь может быть конфигурирован для осуществления цифро-аналогового преобразования с целью преобразовать остаточный сигнал шумовой коррекции в аналоговый остаточный сигнал
Например, процессор 522 сигнала обратной передачи может содержать аналого-цифровой преобразователь, модулятор, цифро-аналоговый (D/A) преобразователь или другие подобные компоненты, либо какую-то комбинацию этих компонентов. Аналого-цифровой преобразователь процессора 522 сигнала обратной передачи может быть конфигурирован для преобразования аналогового остаточного шумового сигнала в цифровой остаточный шумовой сигнал . Частота дискретизации аналого-цифрового преобразователя может быть больше чем удвоенная максимальная частота аналогового остаточного шумового сигнала . Модулятор может быть конфигурирован для осуществления инверсии фазы цифрового остаточного шумового сигнала для генерации остаточного сигнала шумовой коррекции. В некоторых вариантах, процессор 522 сигнала обратной передачи может определить остаточный сигнал шумовой коррекции на основе цифрового остаточного шумового сигнала и параметра . Цифро-аналоговый преобразователь может быть конфигурирован для осуществления цифро-аналогового преобразования с целью преобразовать остаточный сигнал шумовой коррекции в аналоговый остаточный сигнал  шумовой коррекции. Этот аналоговый остаточный сигнал шумовой коррекции может быть использован в качестве входного сигнала для громкоговорителя 540 с костной проводимостью. Громкоговоритель 540 с костной проводимостью может быть конфигурирован для определения шумоподавляющего звука с целью уменьшения или полного подавления остаточных шумов на основе аналогового остаточного сигнала шумовой коррекции.
шумовой коррекции. Этот аналоговый остаточный сигнал шумовой коррекции может быть использован в качестве входного сигнала для громкоговорителя 540 с костной проводимостью. Громкоговоритель 540 с костной проводимостью может быть конфигурирован для определения шумоподавляющего звука с целью уменьшения или полного подавления остаточных шумов на основе аналогового остаточного сигнала шумовой коррекции.
На Фиг. 7 представлена упрощенная схема, иллюстрирующая пример системы 700 устранения шумов, согласно некоторым вариантам настоящего изобретения. Эта система 700 устранения шумов может содержать звуковой датчик 510, устройство 110 обработки данных и громкоговоритель 540 с костной проводимостью. Устройство 110 обработки данных может содержать процессор 521 сигнала прямой передачи. Система 700 устранения шумов может представлять собой один из примеров вариантов системы 100 устранения шумов.
Звуковой датчик 510 может воспринимать и измерять первичные шумы 590 и генерировать первичный шумовой сигнал, представляющий эти первичные шумы 590.
Процессор 521 сигнала прямой передачи может быть конфигурирован для генерации первичного сигнала шумовой коррекции на основе первичного шумового сигнала.
Первичный сигнал шумовой коррекции может быть использован в качестве входного сигнала для громкоговорителя 540 с костной проводимостью с целью генерации шумоподавляющего звука для подавления первичных шумов. Этот шумоподавляющий звук может быть передан во внутреннее ухо пользователя 550 по пути с костной проводимостью, а первичные шумы 590 могут быть переданы во внутреннее ухо пользователя 550 по пути с воздушной проводимостью.
Следует отметить, что приведенные выше описания систем 500, 600 и 700 устранения шумов предназначены служить иллюстрациями и не имеют целью ограничивать объем настоящего изобретения. Специалисту в рассматриваемой области должны быть очевидны множество альтернатив, модификаций и вариаций. Признаки, структуры, способы и другие характеристики примеров вариантов, рассматриваемых здесь, можно комбинировать различными способами для получения дополнительных и/или альтернативных примеров вариантов. Например, система устранения шумов (например, любая из систем 500. 600 и 700 устранения шумов) может содержать один или несколько дополнительных компонентов. В дополнение или в качестве альтернативы, один или несколько компонентов системы устранения шумов, описываемой выше, могут быть исключены. Например, в системе 500 устранения шумов, один из процессоров – процессор 521 сигнала прямой передачи или процессор 522 сигнала обратной передачи, может быть исключен. В качестве другого примера, два или более компонентов системы устранения шумов могут быть интегрированы в одном компоненте. Просто в качестве примера, в системе 500 устранения шумов, аналого-цифровой преобразователь процессора 521 сигнала прямой передачи может быть интегрирован в звуковой датчик 510, и/или цифро-аналоговый преобразователь устройства 110 обработки данных может быть интегрирован в громкоговоритель 540 с костной проводимостью.
На Фиг. 8 – 10 и 12 – 13 представлены упрощенные схемы, иллюстрирующие примеры устройств 110A – C и 110E – F обработки данных согласно некоторым вариантам настоящего изобретения. Каждое из этих устройств 110A – C и 110E – F обработки данных может быть конфигурировано для получения и обработки шумового сигнала. Этот шумовой сигнал может представлять цифровой сигнал или аналоговый сигнал. Для целей иллюстрации, если иное не установлено или не очевидно из контекста, настоящее изобретение описано здесь в допущении, что шумовой сигнал является цифровым сигналом, что не имеет целью как-то ограничить объем настоящего изобретения. Каждое из устройств 110A – C и 110E – F обработки данных может содержать один или несколько компонентов для обработки цифровых сигналов. Следует понимать, что это не предназначено служить ограничением. Шумовой сигнал может быть аналоговым сигналом, и устройство обработки данных может содержать один или несколько компонентов дл обработки аналоговых сигналов, как это рассмотрено в других местах настоящего описания (например, на Фиг. 11 и в относящихся к нему описаниях).
На Фиг. 8 представлена упрощенная схема, иллюстрирующая пример устройства 110A обработки данных согласно некоторым вариантам настоящего изобретения. Это устройство 110A обработки данных может содержать процессор 521a сигнала прямой передачи и процессор 522a сигнала обратной передачи. Устройство 110A обработки данных может быть конфигурировано для определения сигнала 815 шумовой коррекции с целью уменьшения первичных шумов и остаточных шумов. Процессор 521a сигнала прямой передачи и процессор 522a сигнала обратной передачи могут быть примерами вариантов процессора 521 сигнала прямой передачи и процессора 522 сигнала обратной передачи, соответственно.
Процессор 521a сигнала прямой передачи может быть конфигурирован для приема аналогового первичного шумового сигнала  и определения первичного сигнала 811 шумовой коррекции на основе этого аналогового первичного шумового сигнала на пути прямой передачи для управления шумами. Аналоговый первичный шумовой сигнал может быть аналоговым электрическим сигналом, представляющим первичные шумы (например, окружающим шумы). Процессор 521a сигнала прямой передачи может содержать аналого-цифровой преобразователь 810 и модулятор 850.
и определения первичного сигнала 811 шумовой коррекции на основе этого аналогового первичного шумового сигнала на пути прямой передачи для управления шумами. Аналоговый первичный шумовой сигнал может быть аналоговым электрическим сигналом, представляющим первичные шумы (например, окружающим шумы). Процессор 521a сигнала прямой передачи может содержать аналого-цифровой преобразователь 810 и модулятор 850.
Аналого-цифровой преобразователь 810 может быть конфигурирован для преобразования аналогового первичного шумового сигнала в цифровой первичный шумовой сигнал . Частота дискретизации аналого-цифрового преобразователя 810 может быть больше, чем  , где
, где  обозначает максимальную частоту аналогового первичного шумового сигнала
обозначает максимальную частоту аналогового первичного шумового сигнала  . Модулятор 850 может быть конфигурирован для определения первого сигнала 811 шумовой коррекции на основе цифрового первичного шумового сигнала . В некоторых вариантах, модулятор 850 может содержать фазовый модулятор для осуществления фазовой модуляции и амплитудный модулятор для осуществления амплитудной модуляции.
. Модулятор 850 может быть конфигурирован для определения первого сигнала 811 шумовой коррекции на основе цифрового первичного шумового сигнала . В некоторых вариантах, модулятор 850 может содержать фазовый модулятор для осуществления фазовой модуляции и амплитудный модулятор для осуществления амплитудной модуляции.
Фазовая модуляция может осуществляться фазовым модулятором. Например, фазовый модулятор может осуществлять инверсию фазы и, в качестве опции, фазовую компенсацию цифрового первичного шумового сигнала для генерации сигнала  , где параметр обозначает разность во времени между первым временем для прохождения звука воздушной проводимости в улитку 207 по пути 211 с воздушной проводимостью и вторым временем для прохождения звука костной проводимости в улитку 207 по пути 221 с костной проводимостью. Амплитудный модулятор может осуществить амплитудную модуляцию сигнала в соответствии с коэффициентом регулирования амплитуды для генерации первичного сигнала
, где параметр обозначает разность во времени между первым временем для прохождения звука воздушной проводимости в улитку 207 по пути 211 с воздушной проводимостью и вторым временем для прохождения звука костной проводимости в улитку 207 по пути 221 с костной проводимостью. Амплитудный модулятор может осуществить амплитудную модуляцию сигнала в соответствии с коэффициентом регулирования амплитуды для генерации первичного сигнала  шумовой коррекции.
шумовой коррекции.
Процессор 522a сигнала обратной передачи может быть конфигурирован для приема остаточного шумового сигнала и определения остаточного сигнала 813 шумовой коррекции (например,  ) на основе остаточного шумового сигнала на пути обратной передачи для управления шумами. Остаточный шумовой сигнал может являться электрическим сигналом, представляющим остаточные шумы. Процессор 522a сигнала обратной передачи может содержать аналого-цифровой преобразователь 820 и модулятор 860. Модулятор 860 может содержать фазовый модулятор и/или амплитудный модулятор. Модулятор 860 может иметь функции, аналогичные модулятору 850, как описано выше.
) на основе остаточного шумового сигнала на пути обратной передачи для управления шумами. Остаточный шумовой сигнал может являться электрическим сигналом, представляющим остаточные шумы. Процессор 522a сигнала обратной передачи может содержать аналого-цифровой преобразователь 820 и модулятор 860. Модулятор 860 может содержать фазовый модулятор и/или амплитудный модулятор. Модулятор 860 может иметь функции, аналогичные модулятору 850, как описано выше.
В некоторых вариантах, модулятор 850 и/или модулятор 860 может содержать группу модуляторов по поддиапазонам. Больше информации относительно группы модуляторов по поддиапазонам можно найти в других местах настоящего описания. См., например, Фиг. 9 и относящееся к нему описание.
Устройство 110A обработки данных может комбинировать первичный сигнал 811 шумовой коррекции (например, ) с остаточным сигналом 813 шумовой коррекции (например, ) для определения сигнала 815 шумовой коррекции (например, +).
В некоторых вариантах, сигнал 815 шумовой коррекции, определяемый устройством 110A обработки данных может представлять собой полнодиапазонный сигнал. Сигнал 815 шумовой коррекции 815 может быть определен в соответствии с Уравнением (8) ниже:
 =
= (8)
(8)
В некоторых вариантах, устройство 110A обработки данных может соответственно передать сигнал 811 шумовой коррекции прямой передачи и сигнал 813 шумовой коррекции обратной передачи по двум каналам связи.
На Фиг. 9 представлена упрощенная схема, иллюстрирующая пример устройства 110B обработки данных согласно некоторым вариантам настоящего изобретения. Это устройство 110B обработки данных может быть аналогичным устройству 110A обработки данных, как это описано применительно к Фиг. 8, за исключением некоторых компонентов или признаков. Как показано на Фиг. 9, устройство 110B обработки данных может содержать процессор 521b сигнала прямой передачи и процессор 522a сигнала обратной передачи. Процессор 521b сигнала прямой передачи может быть связан с датчиком 910 поддиапазонов (который является примером варианта звукового датчика 510, как это описано применительно к Фиг. 5).
Датчик 910 поддиапазонов может быть конфигурирован для восприятия и измерения первичных шумов 590 и определения нескольких первичных шумовых сигналов поддиапазонов (например,  ,
,  , … ,
, … ,  ), представляющих первичные шумы 590. Первичные шумы 590 могут представлять собой аудио сигнал, имеющий определенный частотный диапазон. Первичный шумовой сигнал одного поддиапазона может обозначать сигнал, имеющий более узкий частотный диапазон, чем первичные шумы 590, и находящийся в пределах частотного диапазона этих первичных шумов 590. Например, первичные шумы 590 могут занимать частотный диапазон 10 – 30,000 Гц. Частотный диапазон первичного шумового сигнала одного поддиапазона может составлять 100 – 200 Гц, что находится в пределах частотного диапазона первичных шумов 590. На прохождение звука через кости (например, изменение амплитуды звука в процессе прохождения) может повлиять частота звука. Для звуков с разными частотами, передаточные функции пути с костной проводимостью могут быть различными. Для улучшения эффекта уменьшения шумов может быть использована технология уменьшения шумов по поддиапазонам.
), представляющих первичные шумы 590. Первичные шумы 590 могут представлять собой аудио сигнал, имеющий определенный частотный диапазон. Первичный шумовой сигнал одного поддиапазона может обозначать сигнал, имеющий более узкий частотный диапазон, чем первичные шумы 590, и находящийся в пределах частотного диапазона этих первичных шумов 590. Например, первичные шумы 590 могут занимать частотный диапазон 10 – 30,000 Гц. Частотный диапазон первичного шумового сигнала одного поддиапазона может составлять 100 – 200 Гц, что находится в пределах частотного диапазона первичных шумов 590. На прохождение звука через кости (например, изменение амплитуды звука в процессе прохождения) может повлиять частота звука. Для звуков с разными частотами, передаточные функции пути с костной проводимостью могут быть различными. Для улучшения эффекта уменьшения шумов может быть использована технология уменьшения шумов по поддиапазонам.
В некоторых вариантах, по меньшей мере два первичных шумовых сигнала поддиапазонов могут иметь разные частотные диапазоны. В качестве опции, первичный шумовой сигнал каждого поддиапазона может занимать частотный диапазон, отличный от частотных диапазонов первичных шумовых сигналов других поддиапазонов. Шумовые сигналы поддиапазонов могут иметь одинаковую ширину полосы частот или разную ширину полосы частот. В некоторых вариантах, наложения между частотными диапазонами пары шумовых сигналов соседних поддиапазонов в частотной области можно избежать, чтобы улучшить эффект снижения шумов. Как используется здесь, шумовые сигналы двух поддиапазонов, центральные частоты которых соседствуют одна с другой, из совокупности шумовых сигналов поддиапазонов можно рассматривать как соседствующие один с другим в частотной области.
В некоторых вариантах, спектры первичного шумового сигнала первого поддиапазона и первичного шумового сигнала второго поддиапазона могут пересекаться в точке половинной мощности первичного шумового сигнала первого поддиапазона и/или в точке половинной мощности первичного шумового сигнала второго поддиапазона. Точкой половинной мощности некоторого сигнала может называться частотная точка, в которой наблюдается конкретное снижение уровня мощности (например, -3 дБ). В некоторых вариантах, комбинация частотных диапазонов первичных шумовых сигналов поддиапазонов может покрывать частотный диапазон первичных шумов 590. Ширина полосы частот первичного шумового сигнала разных поддиапазонов может быть одинаковой или различной для этих разных поддиапазонов. В дополнение или в качестве альтернативы, можно избежать наложения между частотными диапазонами первичных шумовых сигналов пары соседних поддиапазонов в частотной области.
В некоторых вариантах, датчик 910 поддиапазонов может быть конфигурирован для преобразования первичных шумов в электрические сигналы и разбиения этого электрического сигнала на первичные шумовые сигналы поддиапазонов. Например, датчик 910 поддиапазонов может содержать акустоэлектрический преобразователь, конфигурированный для преобразования первичных шумов в электрические сигналы, и модуль разбиения диапазона, конфигурированный для разбиения электрического сигнала на первичные шумовые сигналы поддиапазонов. Например, этот модуль разбиения диапазона может содержать несколько полосно-пропускающих фильтров. Каждый из этих полосно-пропускающих фильтров может иметь уникальную частотную характеристику, конфигурированную для генерации первичного шумового сигнала одного поддиапазона посредством обработки электрического сигнала. Такие полосно-пропускающие фильтры могут представлять собой активные полосно-пропускающие фильтры и/или пассивные полосно-пропускающие фильтры. Такие полосно-пропускающие фильтры могут представлять собой фильтры Баттерворта, фильтры Чебышева, фильтры Кауэра или другие подобные фильтры, либо какую-то комбинацию таких фильтров.
В некоторых вариантах, датчик 910 поддиапазонов может содержать несколько акустоэлектрических преобразователей. Каждый из этих акустоэлектрических преобразователей может иметь уникальную частотную характеристику и быть конфигурирован для генерации первичного шумового сигнала одного из поддиапазонов посредством обработки первичных шумов. Информацию относительно генерации шумового сигнала поддиапазона можно найти в заявке на выдачу патента PCT No. PCT/CN2019/109301, под названием «СИСТЕМЫ И СПОСОБЫ ДЛЯ УМЕНЬШЕНИЯ ШУМОВ С ИСПОЛЬЗОВАНИЕМ ТЕХНОЛОГИИ УМЕНЬШЕНИЯ ШУМОВ ПО ПОДДИАПАЗОНАМ» (“SYSTEMS AND METHODS FOR NOISE REDUCTION USING SUB-BAND NOISE REDUCTION TECHNIQUE”), которая подана 30 сентября 2019 г. и все содержание которой включено сюда посредством ссылки.
Процессор 521b сигнала прямой передачи может быть конфигурирован для приема первичных шумовых сигналов поддиапазонов от датчика 910 поддиапазонов и генерации первичного сигнала 911 шумовой коррекции для уменьшения первичных шумов 590. Например, процессор 521b сигнала прямой передачи может содержать группу 920 модуляторов и комбинационный модуль 930. В некоторых вариантах, первичные шумовые сигналы могут быть переданы от датчика 910 поддиапазонов в группу 920 модуляторов через параллельные передатчики. В качестве опции, первичный шумовой сигнал одного поддиапазона может быть передан через один передатчик в соответствии с некоторым протоколом связи для передачи цифровых сигналов. К примерам таких протоколов связи могут относиться протокол AES3 (общества инженеров по звуковой технике (audio engineering society)), протокол AES/EBU (Европейского вещательного союза (European broadcast union)), EBU (Европейский вещательный союз), протокол ADAT (автоматическое накопление и передача данных (Automatic Data Accumulator and Transfer)), протокол I2S (Inter—IC Sound), протокол TDM (временное уплотнение (Time Division Multiplexing)), MIDI (цифровой интерфейс музыкальных инструментов (Musical Instrument Digital Interface)), протокол CobraNet Ethernet AVB (Ethernet Audio/VideoBridging), протокол Dante, протоколы ITU (международного телекоммуникационного союза (International Telecommunication Union))-T G.728, ITU-T G.711, ITU-T G.722, ITU-T G.722.1, ITU-T G.722.1 Приложение C, протокол AAC (усовершенствованное аудио кодирование (Advanced Audio Coding))-LD, или другие подобные протоколы, либо комбинация таких протоколов. В некоторых альтернативных вариантах, первичные шумовые сигналы могут быть обработаны для преобразования в одноканальный сигнал, например, способом частотного уплотнения, и переданы в группу 920 модуляторов.
Группа 920 модуляторов может содержать несколько модуляторов 920a – 920N. Число (или счет) модуляторов 920a – 920N т.е. N) может быть установлено на основе требований системы 100 устранения шумов. Например, число модуляторов 920a – 920N может быть равно какому-либо положительному целому числу больше 1, такому как 5, 10, 15 или другому подобному числу. В некоторых вариантах, число (или счет) модуляторов 920a – 920N может быть равно числу (или счету) первичных шумовых сигналов поддиапазонов, генерируемых датчиком 910 поддиапазонов.
Каждый из нескольких модуляторов 920a – 920N может быть конфигурирован для приема первичного шумового сигнала одного из поддиапазонов от датчика 910 поддиапазонов и генерировать первичный сигнал шумовой коррекции соответствующего поддиапазона посредством модуляции принятого первичного шумового сигнала поддиапазона. Если взять модулятор 920i в качестве примера, модуляция, осуществляемая модулятором 920i, может представлять собой амплитудную модуляцию и/или фазовую модуляцию (например, инверсию фазы и/или компенсацию фазы) для первичного шумового сигнала соответствующего поддиапазона. В некоторых вариантах, фазовая модуляция и амплитудная модуляция применительно к первичному шумовому сигналу поддиапазона могут осуществляться последовательно или параллельно. Например, модулятор 920i может осуществлять амплитудную модуляцию сигнала на основе коэффициента регулирования амплитуды, соответствующего этому сигналу , для генерации сигнала  , где
, где  ,
,  обозначает передаточную функцию пути 211 с воздушной проводимостью для первичного шумового сигнала i-го поддиапазона и
обозначает передаточную функцию пути 211 с воздушной проводимостью для первичного шумового сигнала i-го поддиапазона и  обозначает передаточную функцию пути 221 с костной проводимостью для первичного шумового сигнала i-го поддиапазона. Модулятор 920i может далее осуществлять инверсию фазы сигнала для генерации первичного сигнала
обозначает передаточную функцию пути 221 с костной проводимостью для первичного шумового сигнала i-го поддиапазона. Модулятор 920i может далее осуществлять инверсию фазы сигнала для генерации первичного сигнала  шумовой коррекции соответствующего поддиапазона.
шумовой коррекции соответствующего поддиапазона.
В качестве другого примера, модулятор 920i может осуществлять амплитудную модуляцию, инверсию фазы и фазовую компенсацию применительно к первичному шумовому сигналу соответствующего поддиапазона, для определения первичного сигнала шумовой коррекции соответствующего поддиапазона. Например, первичный сигнал шумовой коррекции поддиапазона, определяемый модулятором 920i, может быть представлен как  , где обозначает разность во времени между первым временем, затрачиваемым звуком воздушной проводимости для поступления к улитке 207 по пути 211 с воздушной проводимостью, и вторым временем, затрачиваемым звуком костной проводимости для поступления к той же самой улитке 207 по пути 221 с костной проводимостью, как это описано в связи с Фиг. 2B.
, где обозначает разность во времени между первым временем, затрачиваемым звуком воздушной проводимости для поступления к улитке 207 по пути 211 с воздушной проводимостью, и вторым временем, затрачиваемым звуком костной проводимости для поступления к той же самой улитке 207 по пути 221 с костной проводимостью, как это описано в связи с Фиг. 2B.
Комбинационный модуль 930 может быть конфигурирован для комбинирования нескольких первичных сигналов шумовой коррекции по поддиапазонам, генерируемых группой 920 модуляторов, с целью генерации первичного сигнала 911 шумовой коррекции. Например, первичный сигнал 911 шумовой коррекции может быть представлен как . В качестве другого примера, первичный сигнал 911 шумовой коррекции может быть представлен как .
Комбинационный модуль 930 может содержать какие-либо компоненты, которые могут комбинировать несколько сигналов. Например, комбинационный модуль 930 может генерировать смешанный сигнал (т.е. первичный сигнал шумовой коррекции) в соответствии с технологией комбинирования сигналов, например, технологии частотного уплотнения. В некоторых альтернативных вариантах, комбинационный модуль 930 может быть независимым компонентом или частью компонента процессора 521b сигнала прямой передачи. В качестве альтернативы, комбинационный модуль 930 может быть исключен, и первичные сигналы шумовой коррекции по поддиапазонам могут быть переданы на выход параллельно.
Процессор 522a сигнала обратной передачи может быть конфигурирован для приема остаточного шумового сигнала (например, , ) и определения остаточного сигнала 813 шумовой коррекции (например, ) на основе остаточного шумового сигнала на пути обратной передачи для управления шумами, как это описано применительно к Фиг. 8.
В некоторых вариантах, сигнал 915 шумовой коррекции (например, ) может быть сформирован посредством комбинирования первичного сигнала 911 шумовой коррекции и остаточного сигнала 813 шумовой коррекции.
Например, сигнал 915 шумовой коррекции может быть определен в соответствии с Уравнением (9) ниже:
 . (9)
. (9)
В некоторых вариантах, сигнал 915 шумовой коррекции может представлять собой цифровой сигнал, аналоговый сигнал или сигнал с широтно-импульсной модуляцией (ШИМ (pulse width modulation (PWM))). Этот сигнал 915 шумовой коррекции может быть передан другому компоненту (например, громкоговорителю с костной проводимостью) для передачи на выход. В некоторых вариантах, устройство 110B обработки данных может передавать на выход первичный сигнал 911 шумовой коррекции и остаточный сигнал 813 шумовой коррекции, соответственно, по двум каналам связи.
На Фиг. 10 представлена упрощенная схема, иллюстрирующая пример устройства 110C обработки данных согласно некоторым вариантам настоящего изобретения. Это устройство 110C обработки данных может быть аналогично устройству 110A обработки данных, как это описано в связи с Фиг. 8, за исключением некоторых компонентов или признаков. Как показано на Фиг. 10, устройство 110C обработки данных может содержать процессор 521c сигнала прямой передачи и процессор 522a сигнала обратной передачи. Это устройство 110C обработки данных может быть конфигурировано для определения сигнала 1015 шумовой коррекции.
Процессор 521c сигнала прямой передачи может быть конфигурирован для приема первичного шумового сигнала, представляющего первичные шумы, и для генерации первичного сигнала 1011 шумовой коррекции для уменьшения первичных шумов на основе первичного шумового сигнала на пути прямой передачи для управления шумами. Этот шумовой сигнал может быть полнодиапазонным сигналом или сигналом поддиапазона. Например, процессор 521c сигнала прямой передачи может содержать аналого-цифровой преобразователь 810 и модулятор 1050. Процессор 521c сигнала прямой передачи может представлять собой один из вариантов процессора 521 сигнала прямой передачи.
Например, первичный шумовой сигнал может представлять собой аналоговый первичный шумовой сигнал . Аналого-цифровой преобразователь 810 может быть конфигурирован для преобразования аналогового первичного шумового сигнала в цифровой первичный шумовой сигнал
. Аналого-цифровой преобразователь 810 может быть конфигурирован для преобразования аналогового первичного шумового сигнала в цифровой первичный шумовой сигнал , как это описано в связи с Фиг. 3B и 8.
, как это описано в связи с Фиг. 3B и 8.
Модулятор 1050 может быть конфигурирован для определения первичного сигнала 1011 шумовой коррекции на основе цифрового первичного шумового сигнала . В некоторых вариантах, модулятор 1050 может содержать фазовый модулятор для осуществления фазовой модуляции и амплитудный модулятор для осуществления амплитудной модуляции.
Например, фазовый модулятор может осуществить инверсию фазы и, в качестве опции, фазовую компенсацию применительно к цифровому первичному шумовому сигналу для генерации сигнала  , где обозначает разность во времени между опорным значением времени прохождения звука по пути с костной проводимостью. Больше информации относительно разности
, где обозначает разность во времени между опорным значением времени прохождения звука по пути с костной проводимостью. Больше информации относительно разности  во времени можно найти в других местах настоящего описания. См., например, Фиг. 2B и относящееся к нему описание. Амплитудный модулятор может осуществить амплитудную модуляцию сигнала в соответствии с коэффициентом амплитудной модуляции для генерации первичного сигнала
во времени можно найти в других местах настоящего описания. См., например, Фиг. 2B и относящееся к нему описание. Амплитудный модулятор может осуществить амплитудную модуляцию сигнала в соответствии с коэффициентом амплитудной модуляции для генерации первичного сигнала  шумовой коррекции.
шумовой коррекции.
Процессор 522a сигнала обратной передачи может быть конфигурирован для приема остаточного шумового сигнала (например, , ) и определения остаточного сигнала 813 шумовой коррекции (например, ) на основе остаточного шумового сигнала на пути обратной передачи для управления шумами. как это описано в связи с Фиг. 8.
В некоторых вариантах, сигнал 1015 шумовой коррекции можно генерировать посредством комбинирования первичного сигнала 1011 шумовой коррекции и остаточного сигнала 813 шумовой коррекции. Например, сигнал 1015 шумовой коррекции может быть представлен как +. В некоторых других вариантах, устройство 110C обработки данных может соответственно передавать на выход первичный сигнал 1011 шумовой коррекции и остаточный сигнал 813 шумовой коррекции по двум каналам связи.
На Фиг. 11 представлена упрощенная схема, иллюстрирующая пример устройства 110D обработки данных, согласно некоторым вариантам настоящего изобретения. Это устройство 110D обработки данных может содержать один или несколько компонентов для обработки аналогового сигнала, таких как процессор 521d сигнала прямой передачи и процессор 522d сигнала обратной передачи, как показано на Фиг. 11. Устройство 110D обработки данных может быть конфигурировано для определения сигнала 1115 шумовой коррекции для уменьшения первичных шумов и остаточных шумов.
Процессор 521d сигнала прямой передачи может содержать модулятор 1150, конфигурированный для приема первичного шумового сигнала в форме аналогового электрического сигнала. Модулятор 1150 может быть далее конфигурирован для генерации первичного сигнала 1111 шумовой коррекции на основе первичного шумового сигнала  Например, этот модулятор 1150 может осуществлять фазовую модуляцию и амплитудную модуляцию первичного шумового сигнала для генерации первичного сигнала
Например, этот модулятор 1150 может осуществлять фазовую модуляцию и амплитудную модуляцию первичного шумового сигнала для генерации первичного сигнала  шумовой коррекции, где
шумовой коррекции, где  обозначает коэффициент регулирования амплитуды, соответствующий пути прямой передачи для управления шумами, и
обозначает коэффициент регулирования амплитуды, соответствующий пути прямой передачи для управления шумами, и  обозначает разность во времени между первым временем для прохождения звука воздушной проводимости к улитке 207 по пути 211 с воздушной проводимостью и вторым временем для прохождения звука костной проводимости к той же самой улитке 207 по пути 221 с костной проводимостью.
обозначает разность во времени между первым временем для прохождения звука воздушной проводимости к улитке 207 по пути 211 с воздушной проводимостью и вторым временем для прохождения звука костной проводимости к той же самой улитке 207 по пути 221 с костной проводимостью.
Процессор 522d сигнала обратной передачи может быть конфигурирован для определения остаточного сигнала 1113 шумовой коррекции на пути обратной передачи для управления шумами. Этот процессор 522d сигнала обратной передачи может содержать модулятор 1160. Этот модулятор 1160 может содержать фазовый модулятор и/или амплитудный модулятор. Процессор 522d сигнала обратной передачи может представлять собой один из вариантов процессора 522 сигнала обратной передачи. Например, фазовый модулятор может осуществлять операцию инвертирования фазы остаточного шумового сигнала для генерации остаточного сигнала шумовой коррекции.
В некоторых вариантах, модулятор 1150 и/или модулятор 1160 может содержать один или несколько аналоговых схемных компонентов, конфигурированных для осуществления фазовой модуляции и/или амплитудной модуляции. Например, модулятор 1150 и/или модулятор 1160 может использовать усилитель (например, инвертирующий усилитель) для действия в качестве фазового и/или амплитудного фильтра. Первичный сигнал шумовой коррекции может быть определен с использованием указанного усилителя или некоторых других аналоговых схем. В качестве другого примера, устройство 110D обработки данных может использовать схему задержки (например, линию задержки на основе всепропускающей индуктивно конденсаторной (inductor-capacitor (LC)) схемы, активную аналоговую линию задержки) или некоторые другие аналоговые схемы для осуществления фазовой компенсации применительно к первичному шумовому сигналу.
В некоторых вариантах, модулятор 1150 может содержать первую группу модуляторов, конфигурированную для приема первичных шумовых сигналов нескольких поддиапазонов (в форме аналоговых сигналов) и генерации первичных сигналов шумовой коррекции нескольких поддиапазонов. В дополнение или в качестве альтернативы, модулятор 1160 может содержать вторую группу модуляторов, конфигурированную для приема остаточных шумовых сигналов нескольких поддиапазонов (в форме аналоговых сигналов) и генерации остаточных сигналов шумовой коррекции нескольких поддиапазонов. Больше информации относительно группы модуляторов можно найти в других местах настоящего описания. См., например, Фиг. 9 и относящееся к нему описание.
В некоторых вариантах, устройство 110D обработки данных может комбинировать первичный сигнал 1111 шумовой коррекции (например, ) и остаточный сигнал 1113 шумовой коррекции (например,  ) с целью определения комбинированного сигнала 1115 шумовой коррекции (например, +) для передачи на выход. В качестве другого примера, устройство 110D обработки данных может передавать на выход первичный сигнал 1111 шумовой коррекции и остаточный сигнал 1113 шумовой коррекции, соответственно, по двум каналам связи.
) с целью определения комбинированного сигнала 1115 шумовой коррекции (например, +) для передачи на выход. В качестве другого примера, устройство 110D обработки данных может передавать на выход первичный сигнал 1111 шумовой коррекции и остаточный сигнал 1113 шумовой коррекции, соответственно, по двум каналам связи.
Благодаря использованию аналогового компонента (ов) для обработки сигналов, как описано выше, устройство 110D обработки данных может уменьшить первичные шумы и остаточные шумы без осуществления аналого-цифрового преобразования и/или цифро-аналогового преобразования, тем самым упрощая устройство 110D обработки данных, уменьшая нагрузку на интегральные схемы и повышая скорость работы процедуры уменьшения или полного подавления шумов. Однако по сравнению с цифровым компонентом (ами) для обработки сигналов аналоговый компонент (ы) для обработки сигналов может быть менее гибким и менее подходящим для реализации функций самоадаптации, а также требовать больше рабочих схем.
На Фиг. 12 представлена упрощенная схема, иллюстрирующая пример устройства 110E обработки данных согласно некоторым вариантам настоящего изобретения. Это устройство 110E обработки данных может содержать процессор 521e сигнала прямой передачи и процессор 522e сигнала обратной передачи. Устройство 110E обработки данных может быть конфигурировано для определения первичного сигнала 1211 шумовой коррекции с целью уменьшения первичных шумов и остаточного сигнала 1213 шумовой коррекции с целью уменьшения остаточных шумов.
Процессор 521e сигнала прямой передачи может быть конфигурирован для приема первичного шумового сигнала (например, ) и определения первичного сигнала 1211 шумовой коррекции (например,  ) на основе первичного шумового сигнала на пути прямой передачи для управления шумами. Первичный шумовой сигнал может представлять собой поднодиапазонный сигнал или сигнал какого-либо поддиапазона. Процессор 521e сигнала прямой передачи может содержать аналого-цифровой преобразователь 810, инвертор 1230, модулятор 1250, и цифро-аналоговый преобразователь 1270.
) на основе первичного шумового сигнала на пути прямой передачи для управления шумами. Первичный шумовой сигнал может представлять собой поднодиапазонный сигнал или сигнал какого-либо поддиапазона. Процессор 521e сигнала прямой передачи может содержать аналого-цифровой преобразователь 810, инвертор 1230, модулятор 1250, и цифро-аналоговый преобразователь 1270.
Аналого-цифровой преобразователь 810 может быть конфигурирован для преобразования аналогового первичного шумового сигнал в цифровой первичный шумовой сигнал. Частота дискретизации аналого-цифрового преобразователя 810 может быть больше чем , где обозначает максимальную частоту шумового сигнала. Больше информации относительно аналого-цифрового преобразования можно найти в других местах настоящего описания. См., например, Фиг. 3B и относящееся к нему описание.
в цифровой первичный шумовой сигнал. Частота дискретизации аналого-цифрового преобразователя 810 может быть больше чем , где обозначает максимальную частоту шумового сигнала. Больше информации относительно аналого-цифрового преобразования можно найти в других местах настоящего описания. См., например, Фиг. 3B и относящееся к нему описание.
Инвертор 1230 может быть конфигурирован для определения сигнала с инвертированной фазой на основе цифрового шумового сигнала.
Модулятор 1250 может быть конфигурирован для определения цифрового первичного сигнала шумовой коррекции посредством осуществления фазовой модуляции и/или амплитудной модуляции сигнала с инвертированной фазой. Модулятор 1250 может содержать фазовый модулятор и/или амплитудный модулятор. Например, фазовый модулятор может осуществлять фазовую компенсацию применительно к сигналу с инвертированной фазой для генерации сигнала  . Амплитудный модулятор может осуществлять амплитудную модуляцию сигнала в соответствии с коэффициентом амплитудной модуляции для генерации цифрового первичного сигнала шумовой коррекции.
. Амплитудный модулятор может осуществлять амплитудную модуляцию сигнала в соответствии с коэффициентом амплитудной модуляции для генерации цифрового первичного сигнала шумовой коррекции.
Цифро-аналоговый преобразователь 1270 может быть конфигурирован для преобразования цифрового первичного сигнала шумовой коррекции в аналоговый первичный сигнал шумовой коррекции.
Процессор 522e сигнала обратной передачи может быть конфигурирован для определения остаточного сигнала шумовой коррекции (например,  ) с целью уменьшения остаточных шумов на пути обратной передачи для управления шумами. Этот процессор 522e сигнала обратной передачи может содержать аналого-цифровой преобразователь 820, модулятор 860 и цифро-аналоговый преобразователь 1280. Этот цифро-аналоговый преобразователь 1280 может иметь функции, аналогичные функциям цифро-аналогового преобразователя 1270 как описано выше. Больше информации относительно аналого-цифрового преобразователя 820 и модулятора 860 можно найти в других местах настоящего описания. См., например, Фиг. 8 и относящееся к нему описание.
) с целью уменьшения остаточных шумов на пути обратной передачи для управления шумами. Этот процессор 522e сигнала обратной передачи может содержать аналого-цифровой преобразователь 820, модулятор 860 и цифро-аналоговый преобразователь 1280. Этот цифро-аналоговый преобразователь 1280 может иметь функции, аналогичные функциям цифро-аналогового преобразователя 1270 как описано выше. Больше информации относительно аналого-цифрового преобразователя 820 и модулятора 860 можно найти в других местах настоящего описания. См., например, Фиг. 8 и относящееся к нему описание.
В некоторых вариантах, каждый модулятор – модулятор 1250 и модулятор 860, может содержать свою группу модуляторов поддиапазонов, соответственно. Больше информации относительно группы модуляторов поддиапазонов можно найти в других местах настоящего описания. См., например, Фиг. 9 и относящееся к нему описание.
Устройство 110E обработки данных может передавать на выход один или несколько сигналов шумовой коррекции. Например, это устройство 110E обработки данных может комбинировать первичный сигнал 1121 шумовой коррекции (например, ) и остаточный сигнал 1213 шумовой коррекции (например, ) для передачи на выход комбинированного сигнала шумовой коррекции (например,  ). В качестве другого примера, устройство 110E обработки данных может передавать на выход первичный сигнал 1211 шумовой коррекции и остаточный сигнал 1213 шумовой коррекции, соответственно, по двум каналам связи.
). В качестве другого примера, устройство 110E обработки данных может передавать на выход первичный сигнал 1211 шумовой коррекции и остаточный сигнал 1213 шумовой коррекции, соответственно, по двум каналам связи.
В некоторых вариантах, первичный сигнал 1211 шумовой коррекции и остаточный сигнал 1213 шумовой коррекции могут быть переданы первому громкоговорителю с костной проводимостью и второму громкоговорителю с костной проводимостью, соответственно, для передачи на выход.
На Фиг. 13 представлена упрощенная схема, иллюстрирующая пример устройства 110F обработки данных согласно некоторым вариантам настоящего изобретения. Это устройство 110F обработки данных может содержать процессор 521f сигнала прямой передачи. Этот процессор 521f сигнала прямой передачи может содержать аналого-цифровой преобразователь 810, модулятор 1350 и аналого-цифровой преобразователь 820. Устройство 110F обработки данных может быть конфигурировано для определения сигнала 1311 шумовой коррекции.
Процессор 521c сигнала прямой передачи может быть конфигурирован для приема первичного шумового сигнала, представляющего первичные шумы, и определения первичного сигнала 1311 шумовой коррекции для уменьшения первичных шумов на основе первичного шумового сигнала на пути прямой передачи для управления шумами. Первичный шумовой сигнал может быть в форме аналогового сигнала .
Аналого-цифровой преобразователь 810 может быть конфигурирован для преобразования аналогового сигнала в цифровой первичный шумовой сигнал . Больше информации относительно аналого-цифрового преобразования можно найти в других местах настоящего описания. См., например, Фиг. 3B и относящееся к нему описание.
Цифровой первичный шумовой сигнал может быть обработан модулятором 1350. Этот модулятор 1350 может осуществлять амплитудную модуляцию и/или фазовую модуляцию (например, инвертирование фазы, фазовую компенсацию) цифрового первичного шумового сигнала . Например, модулятор 1350 может осуществлять инвертирование фазы цифрового первичного шумового сигнала для генерации первичного сигнала шумовой коррекции, имеющего такую же амплитуду, как цифровой первичный шумовой сигнал но инвертированную фазу. В качестве другого примера, модулятор 1350 может определить первичный сигнал шумовой коррекции как , где обозначает коэффициент регулирования амплитуды, и обозначает разность во времени между первым временем для поступления звука воздушной проводимости к улитке 207 по пути 211 с воздушной проводимостью и вторым временем для поступления звука костной проводимости к той же самой улитке 207 по пути 221 с костной проводимостью. Больше информации относительно фазовой компенсации и амплитудной модуляции можно найти в других местах настоящего описания. См., например, Фиг. 2B и относящееся к нему описание.
Детектор ошибки (не показан на Фиг. 13) может быть конфигурирован для определения сигнала ошибки  посредством суперпозиции первичного звукового поля и вторичного звукового поля. Первичное звуковое поле может соответствовать первичным шумам (т.е. окружающим шумам). Вторичное звуковое поле может соответствовать шумоподавляющему звуку, определяемому на основе первичных шумов.
посредством суперпозиции первичного звукового поля и вторичного звукового поля. Первичное звуковое поле может соответствовать первичным шумам (т.е. окружающим шумам). Вторичное звуковое поле может соответствовать шумоподавляющему звуку, определяемому на основе первичных шумов.
Один или несколько компонентов устройства 110F обработки данных (например, фильтр) могут быть конфигурированы для осуществления адаптивного управления, например, подстройки коэффициента регулирования амплитуды и/или подстройки разности во времени, чтобы сделать  . Благодаря адаптивному управлению можно добиться активного устранения шумов.
. Благодаря адаптивному управлению можно добиться активного устранения шумов.
Следует отметить, что приведенные выше описания устройств 110A – F обработки данных предназначены служить иллюстрациями, а не ограничениями для объема настоящего изобретения. Специалистам в рассматриваемой области будут очевидны множество альтернатив, модификаций и вариаций. Признаки, структуры, способы и другие характеристики описываемых здесь примеров вариантов можно комбинировать различными способами для получения дополнительных и/или альтернативных примеров вариантов. Например, устройства 110A – F обработки данных могут содержать один или несколько дополнительных компонентов. В дополнение или в качестве альтернативы, один или несколько компонентов устройств 110A – F обработки данных, описываемых выше, могут быть исключены. Например, могут быть исключены один или несколько из аналого-цифровых преобразователей 810, 820 и 1370 и цифро-аналоговых преобразователей 1280 и 1270. В качестве другого примера, два или более компонентов устройств 110A – F обработки данных могут быть интегрированы в одном компоненте. Просто в качестве примера, аналого-цифровой преобразователь 810 (или 820) может быть интегрирован в модулятор 1250 (или 860), и/или цифро-аналоговый преобразователь 1270 (или 1280) также может быть интегрирован в модулятор 1250 (или 860).
После прочтения такого подробного описания базовых концепций, специалистам в рассматриваемой области может быть очевидно, что приведенное выше подробное описание предназначено для представления только в качестве примера и не составляет ограничений. Возможны разнообразные изменения, усовершенствования и модификации, предназначенные для специалистов в рассматриваемой области, хотя такие изменения, усовершенствования и модификации и не указаны здесь в явном виде. Предполагается, что эти изменения, усовершенствования и модификации предложены настоящим изобретением и находятся в пределах смысла и объема примеров вариантов этого изобретения.
Более того, для описания вариантов настоящего изобретения была использована определенная терминология. Например, термины «один из вариантов», «какой-то (или некий) вариант» и/или «некоторые варианты» означают, что конкретный признак, структура или характеристика, описываемые в связи с рассматриваемым вариантом, входит по меньшей мере в один из вариантов настоящего изобретения. Поэтому подчеркивается и должно быть понятно, что две или более ссылки на «какой-то вариант» или на «один из вариантов» или на «альтернативный вариант» в разных частых настоящего описания не обязательно все относятся к одному и тому же варианту. Более того, конкретные признаки, структуры или характеристики можно комбинировать подходящим образом для одного или нескольких вариантов настоящего изобретения.
Далее, специалистам в рассматриваемой области должно быть понятно, что аспекты настоящего изобретения могут быть иллюстрированы и описаны здесь в любом из ряда патентоспособных классов или контекстов, включая любые новые и полезные процедуры, машины, производства или композиции материалов, либо любые новые и полезные их усовершенствования. Соответственно, аспекты настоящего изобретения могут быть реализованы полностью аппаратно, полностью программно (включая, встроенное программное обеспечение, резидентное загружаемое программное обеспечение, микрокоды и т.п.), либо посредством комбинирования программного обеспечения и аппаратуры, что может все в целом называться, в общем случае, как «блок» или «единица», «модуль» или «система». Более того, аспекты настоящего изобретения могут иметь форму компьютерного программного продукта, реализованного в виде одного или нескольких читаемых компьютером носителей информации, на которых записан читаемый компьютером программный код.
Читаемый компьютером носитель сигнала может содержать распространяющийся сигнал данных, несущий читаемый компьютером программный код, например, в видеодиапазоне или как часть волны несущей. Такой распространяющийся сигнал может иметь любую из различных форм, включая электромагнитную, оптическую или другую возможную форму, либо какую-то подходящую комбинацию таких форм. Читаемый компьютером носитель сигнала может представлять собой какой-либо читаемый компьютером носитель, который не является читаемым компьютером носителем для хранения информации и который может передавать, распространять или транспортировать программу для использования посредством или в соединении с системой, аппаратурой или устройством для выполнения команд. Программный код, записанный на читаемом компьютером носителе сигнала, может быть передан с использованием какого-либо подходящего носителя, включая беспроводные, проводные, оптоволоконные кабели, высокочастотные сигналы или другие подобные носители, либо какие-либо подходящие комбинации перечисленных носителей.
Компьютерный программный код для осуществления операций для аспектов настоящего изобретения может быть записан на какой-либо комбинации одного или нескольких языков программирования, включая объектно-ориентированные языки программирования, такие как Java, Scala, Smalltalk, Eiffel, JADE, Emerald, C++, C#, VB. NET, Python и другие подобные языки, обычные процедурные языки программирования, такие как язык программирования "C", Visual Basic, Fortran 2003, Perl, COBOL 2002, PHP, ABAP, языки динамического программирования, такие как Python, Ruby и Groovy, или другие языки программирования. Этот программный код может выполняться целиком на компьютере пользователя, частично на компьютере пользователя, в виде автономного пакета программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере, либо целиком на удаленном компьютере или сервере. В последнем сценарии, удаленный компьютер может быть соединен с компьютером пользователя через сеть связи какого-либо типа, включая локальную сеть связи (local area network (LAN)) или широкомасштабную сеть связи (wide area network (WAN)), либо соединение может быть установлено с внешним компьютером (например, через Интернет с использованием Интернет-провайдера), либо в облачной вычислительной среде, либо предложено в виде сервиса, такого как «Программное обеспечение как услуга» (Software as a Service (SaaS)).
Кроме того, приведенный здесь порядок процессорных элементов или последовательностей, либо использование цифр, букв или других обозначений, не имеет целью как-то ограничить заявляемые процедуры и способы каким-либо порядком за исключением того, какой может быть специфицирован в Формуле изобретения. Хотя приведенное выше описание обсуждает на разнообразных примерах то, что в настоящее время считается многообразием различных полезных вариантов реализации изобретения, должно быть понятно, что такие подробности предназначены исключительно для этой цели, и что прилагаемая Формула изобретения не исчерпывается исключительно рассмотренными здесь вариантами, а напротив, предназначена охватывать модификации и конфигурации, находящиеся в пределах смысла и объема рассмотренных здесь вариантов. Например, хотя реализация различных компонентов, описываемых выше, может быть осуществлена в виде аппаратного устройства, они могут быть также реализованы в виде чисто программного решения, инсталлированного, например, на существующем сервере или мобильном устройстве.
Аналогично, следует понимать, что в приведенном выше описании вариантов осуществления настоящего изобретения различные признаки иногда сгруппированы вместе в одном варианте, на чертеже или в соответствующем описании с целью упрощения описания и помощи в понимании одного или нескольких различных вариантов. Такой способ описания не следует, однако, интерпретировать как отражение намерения, согласно которому заявляемый предмет изобретения требует больше признаков, чем это в явном виде указано в каждом пункте Формулы изобретения. Скорее, заявляемый предмет изобретения может иметь меньше признаков, чем все признаки одного из описанных выше вариантов.
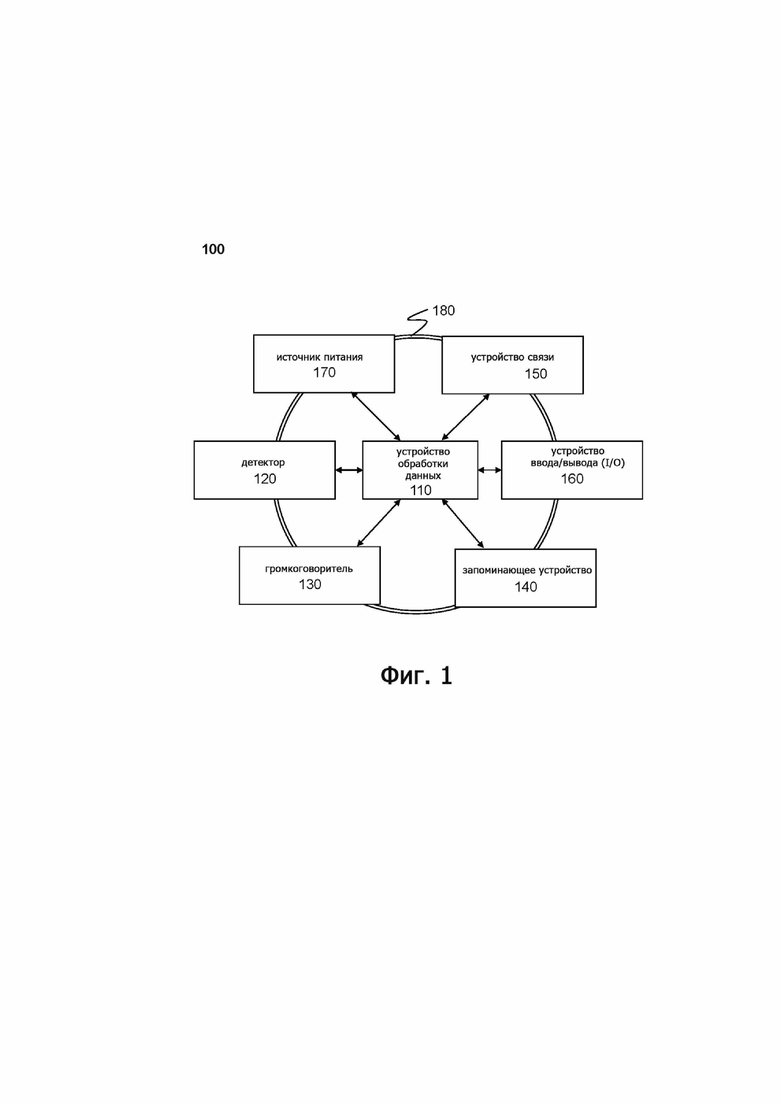
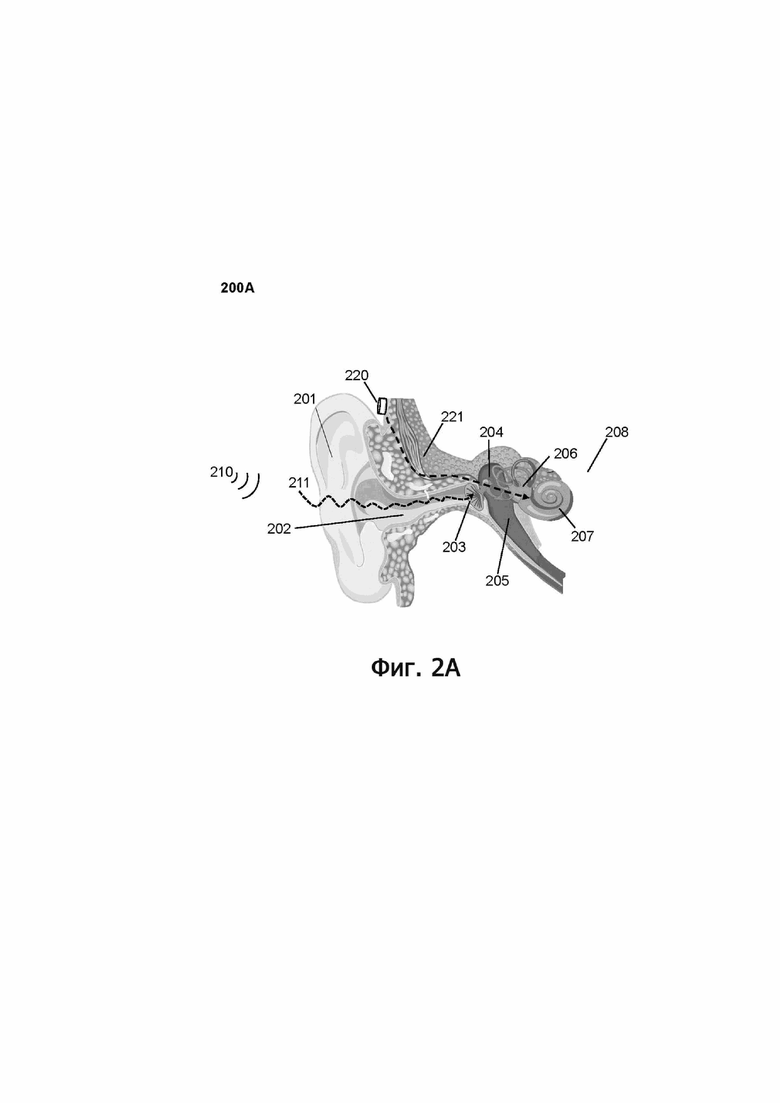
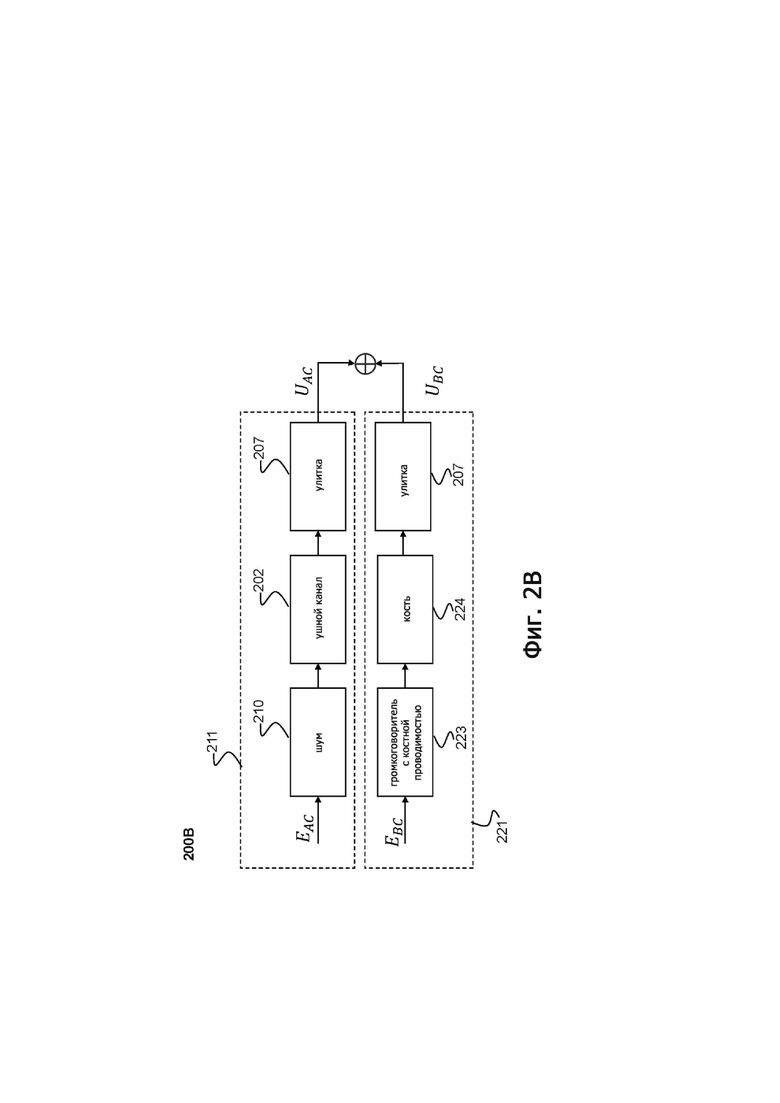
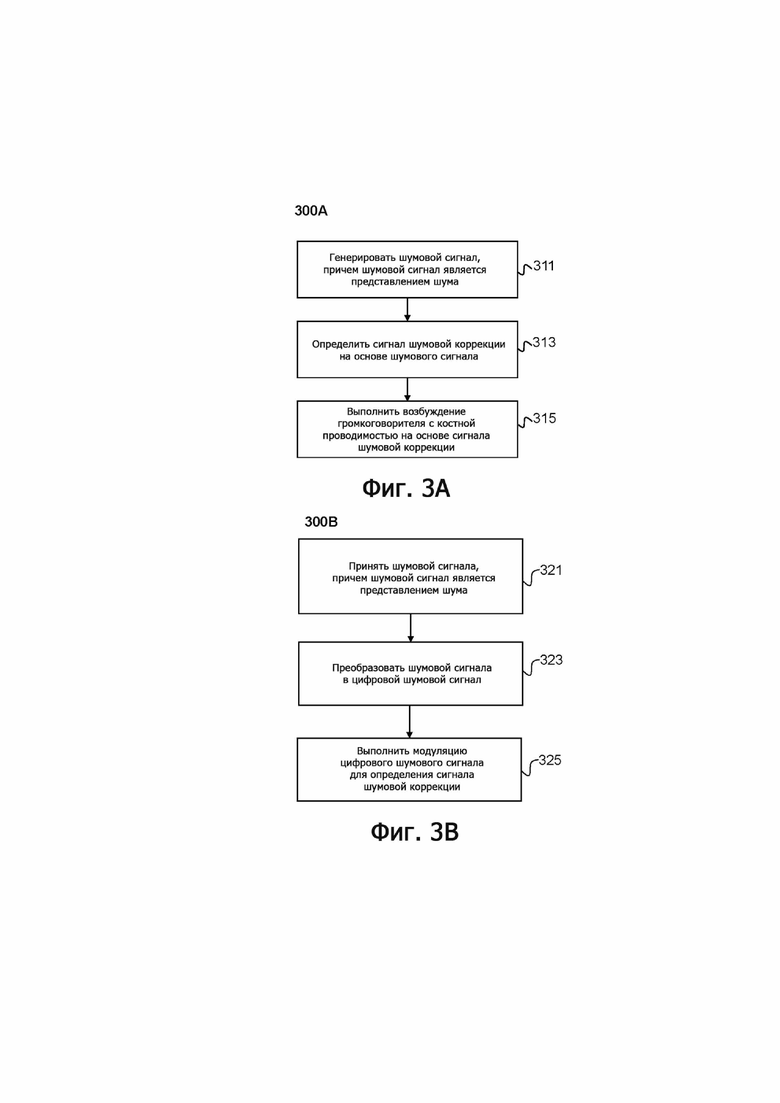
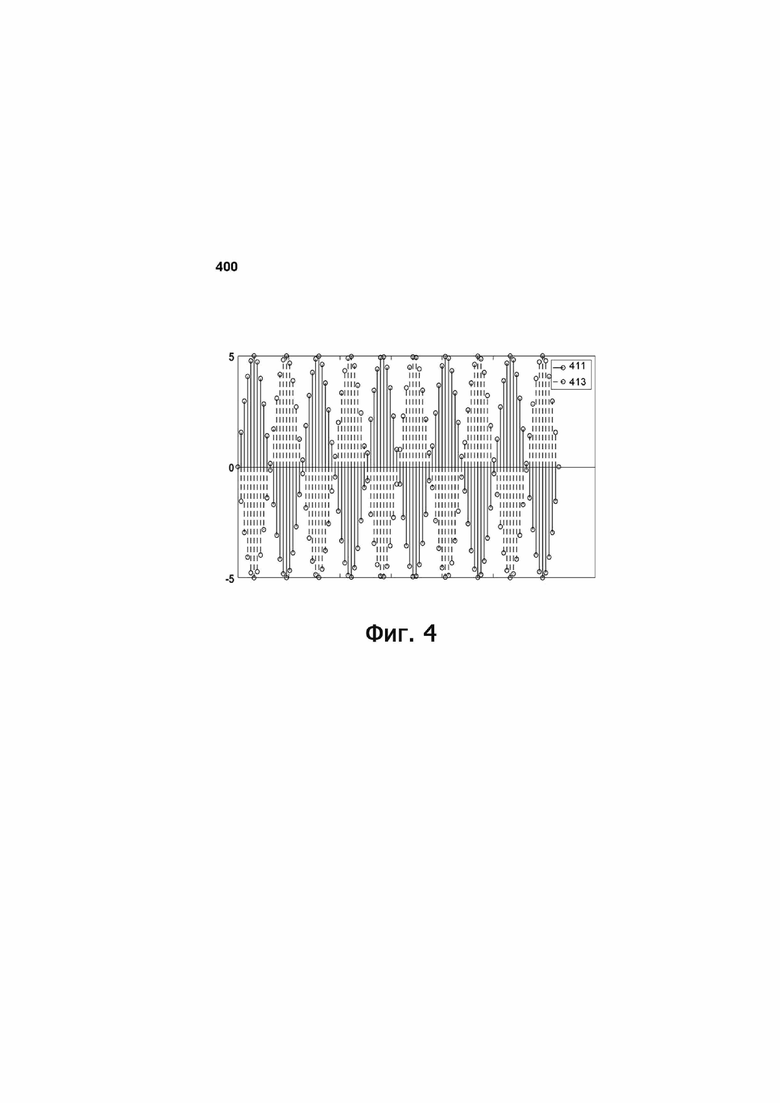
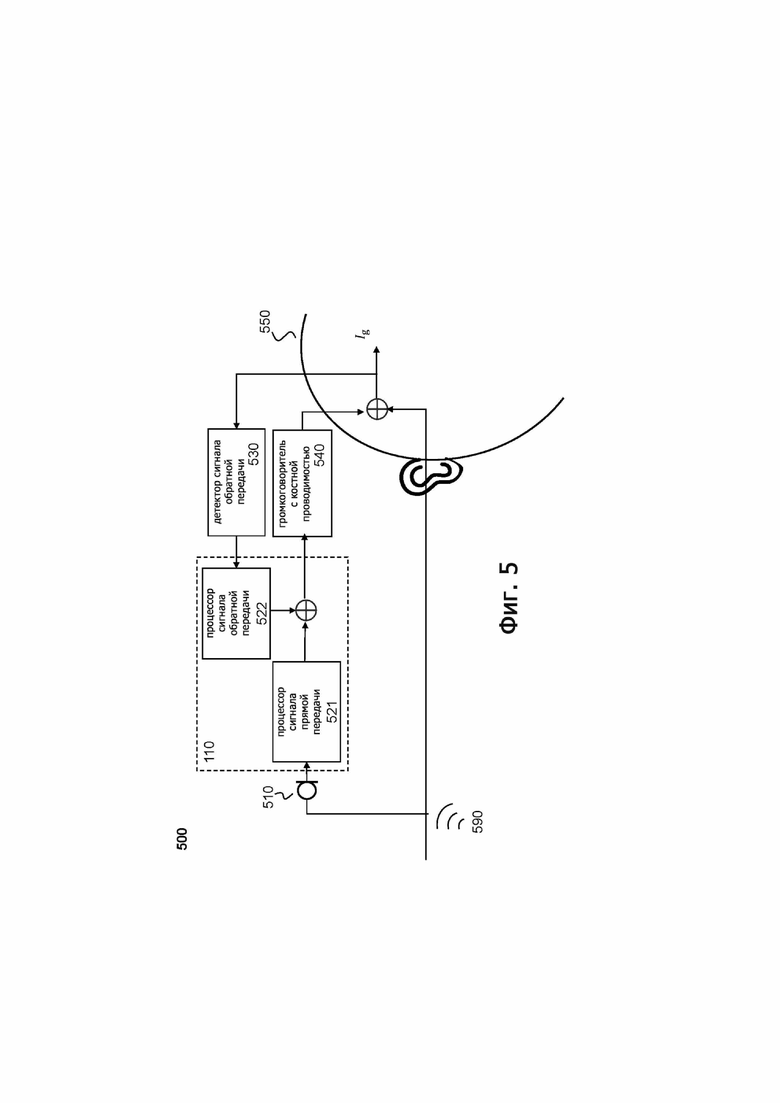
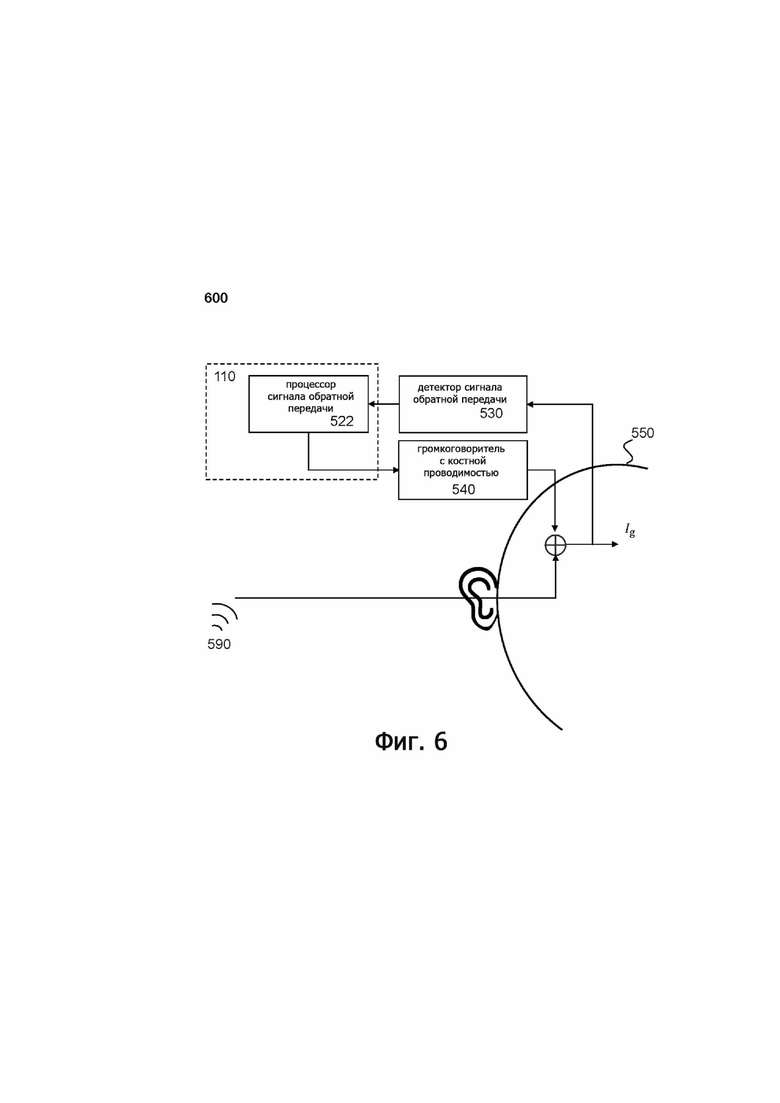
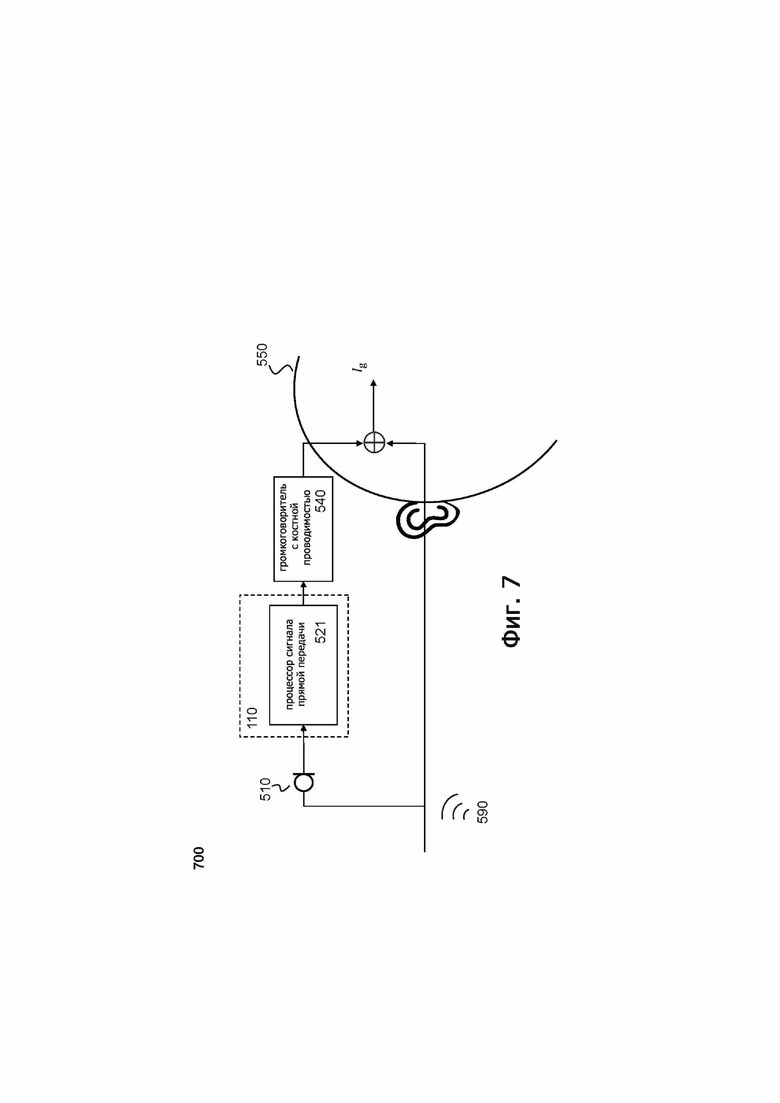
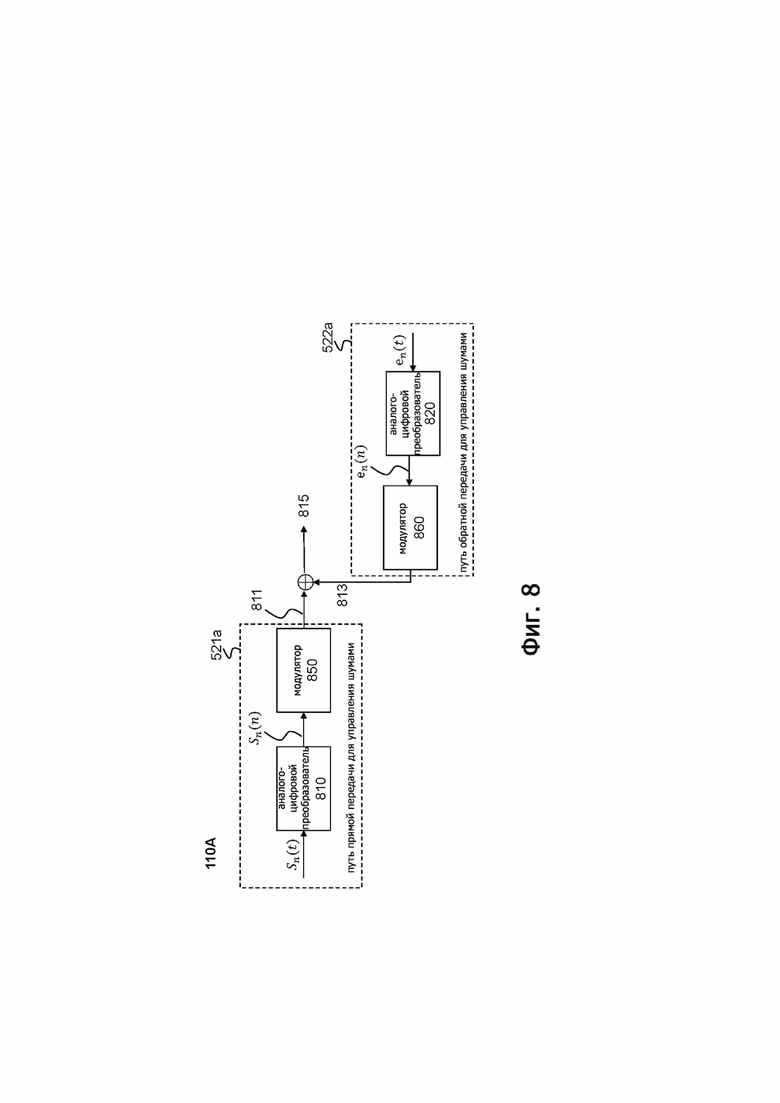
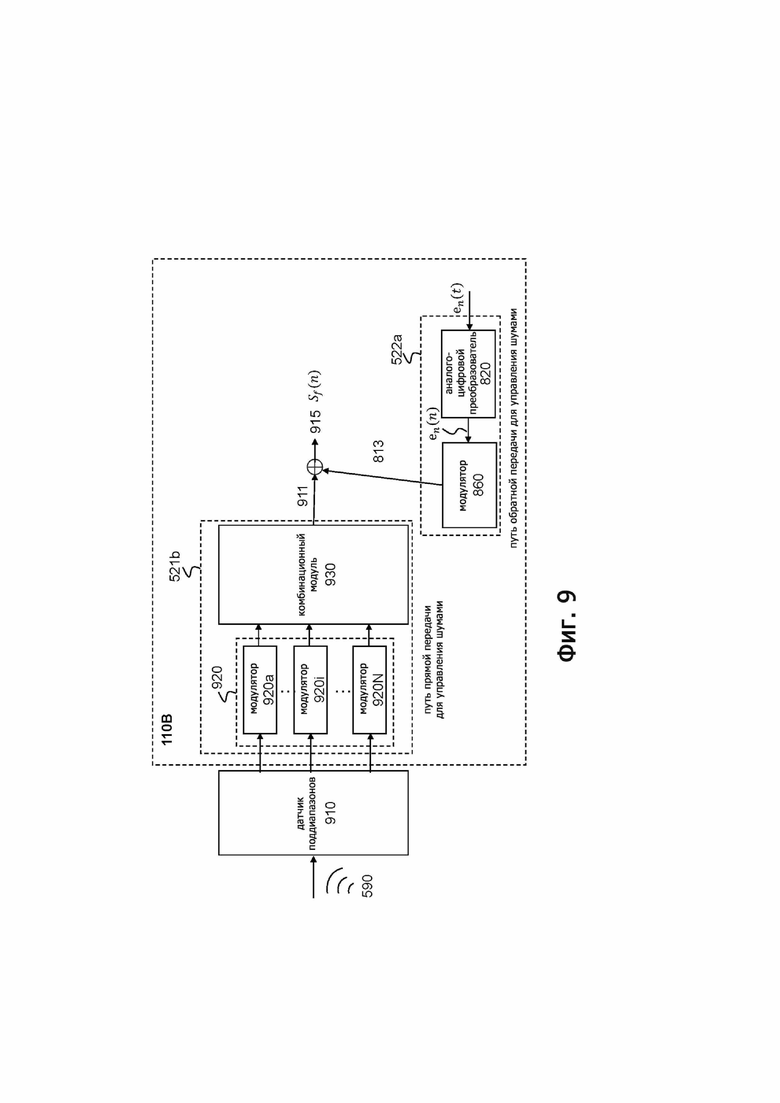
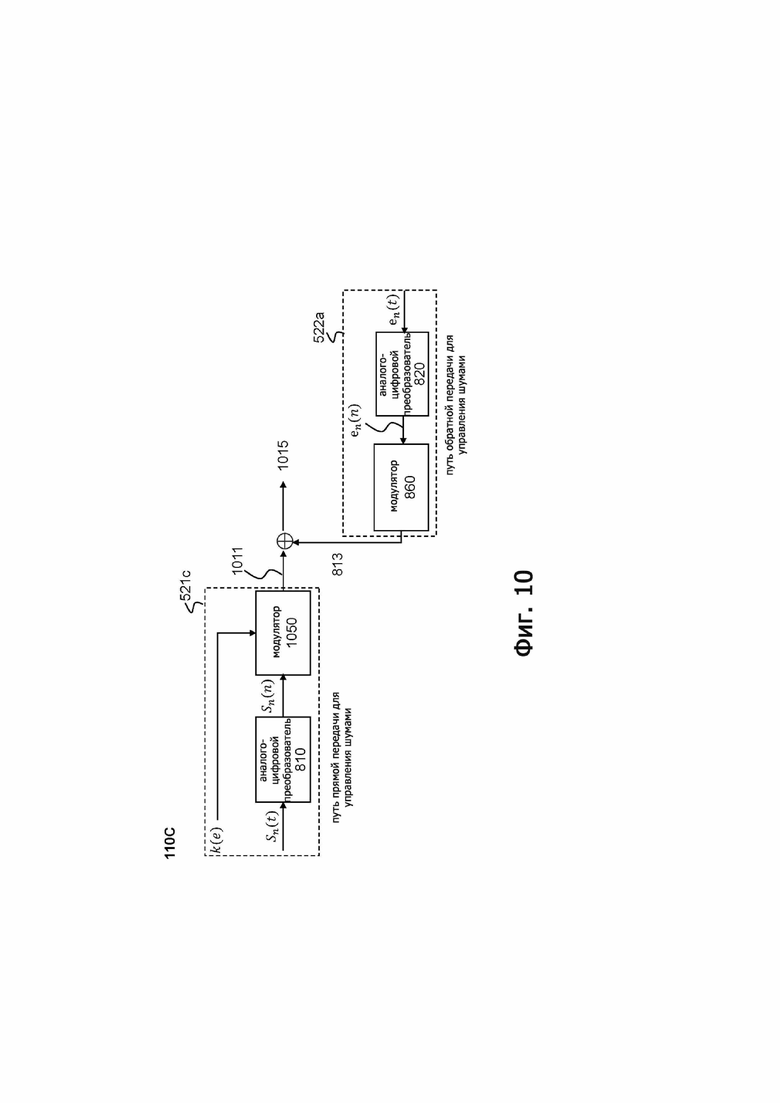
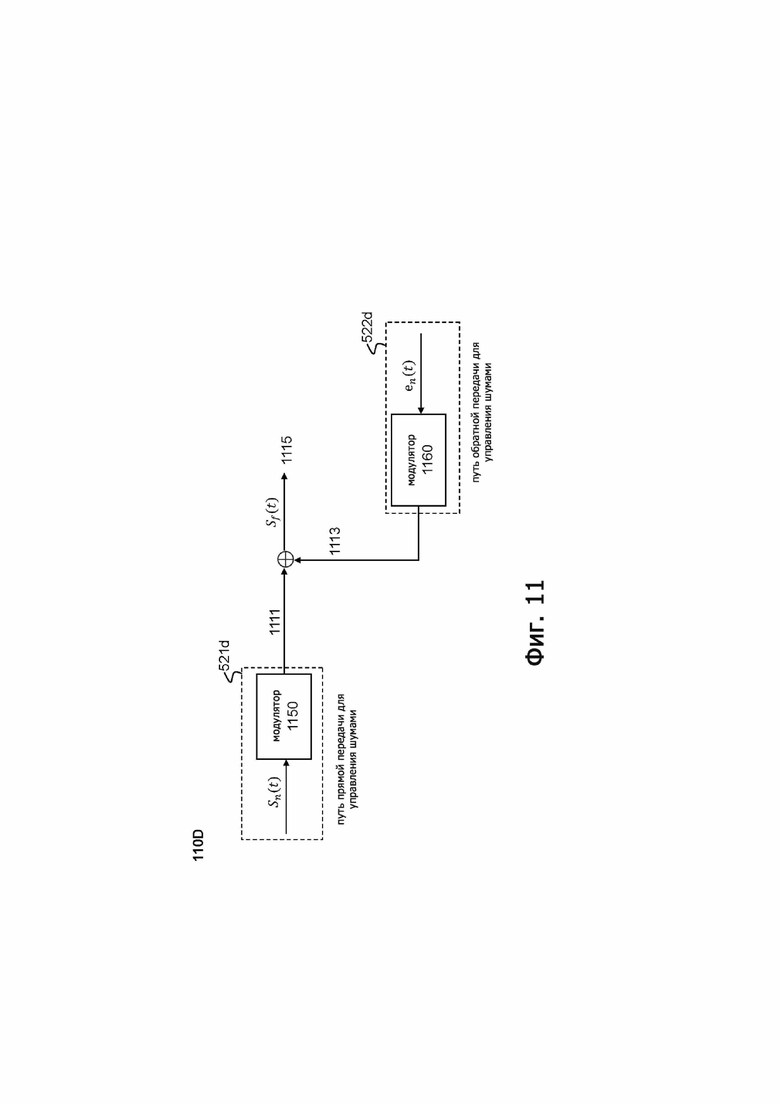
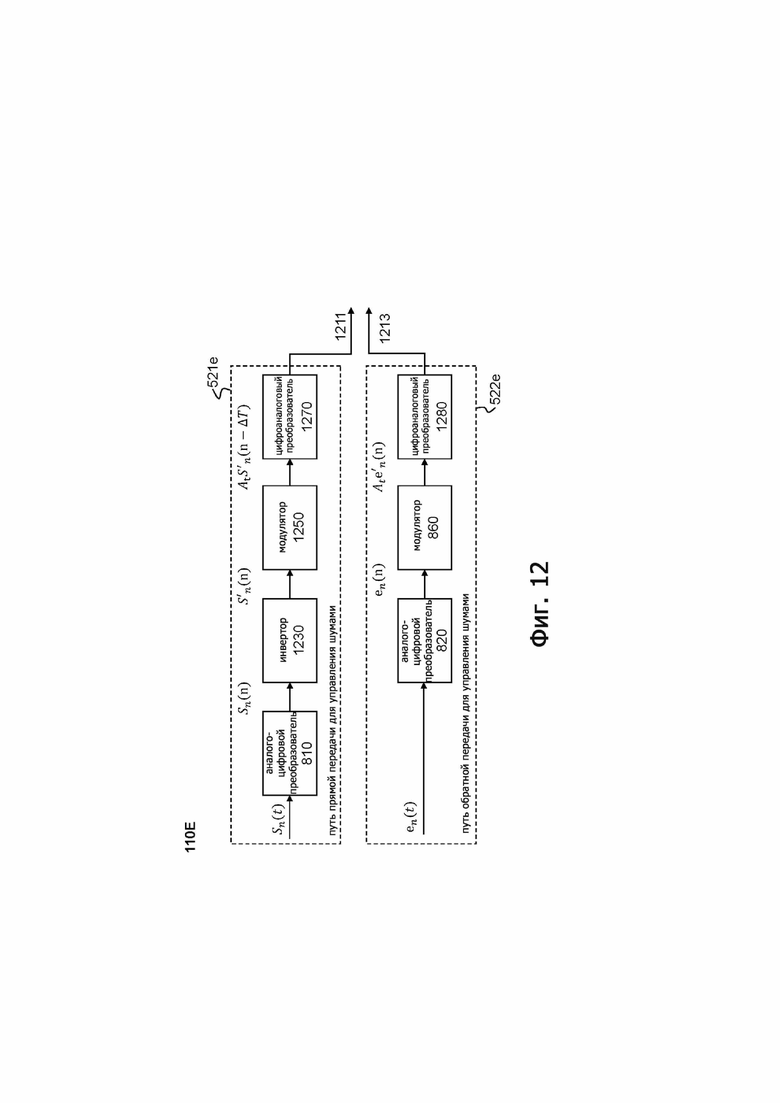

Изобретение относится к области вычислительной техники для подавления шумов. Технический результат заключается в повышении эффективности шумоподавления. Технический результат достигается за счет первого детектора, выполненного с возможностью регистрации первых шумов, поступающих к пользователю по первому пути прохождения звука, и определения первого шумового сигнала для представления первых шумов, причем первый детектор представляет собой микрофон с воздушной проводимостью, и первый путь прохождения звука представляет собой путь с воздушной проводимостью; второго детектора, выполненного с возможностью регистрации вторых шумов, воспринимаемых пользователем, и определения второго шумового сигнала для представления вторых шумов; процессора, выполненного с возможностью определения первого сигнала шумовой коррекции и второго сигнала шумовой коррекции, причем первый сигнал шумовой коррекции определяется на основе первого шумового сигнала, а второй сигнал шумовой коррекции определяется на основе второго шумового сигнала; и громкоговорителя, выполненного с возможностью генерирования звука на основе первого сигнала шумовой коррекции и второго сигнала шумовой коррекции, причем звук передается пользователю по второму пути прохождения звука, отличному от первого пути прохождения звука, при этом указанный громкоговоритель представляет собой громкоговоритель с костной проводимостью, и второй путь прохождения звука представляет собой путь с костной проводимостью. 7 з.п. ф-лы, 15 ил.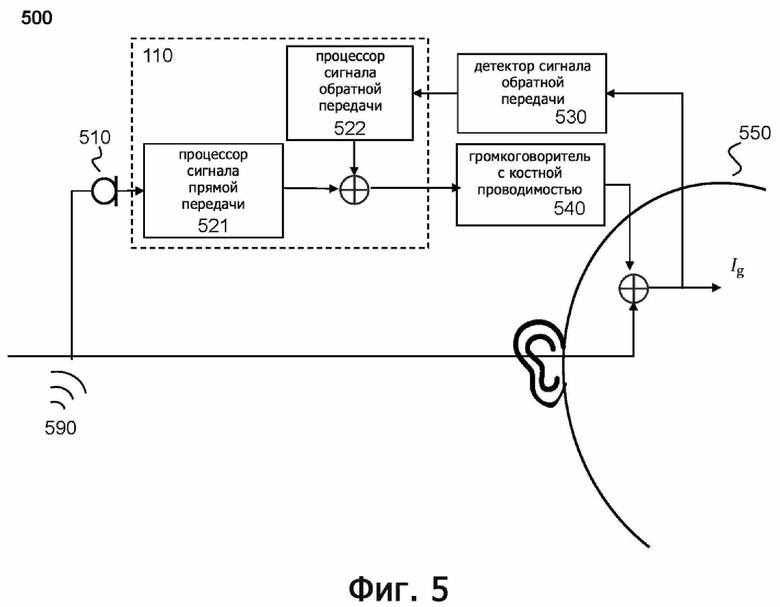
1. Система для подавления шумов, содержащая:
первый детектор, выполненный с возможностью регистрации первых шумов, поступающих к пользователю по первому пути прохождения звука, и определения первого шумового сигнала для представления первых шумов, причем первый детектор представляет собой микрофон с воздушной проводимостью, и первый путь прохождения звука представляет собой путь с воздушной проводимостью;
второй детектор, выполненный с возможностью регистрации вторых шумов, воспринимаемых пользователем, и определения второго шумового сигнала для представления вторых шумов;
процессор, выполненный с возможностью определения первого сигнала шумовой коррекции и второго сигнала шумовой коррекции, причем первый сигнал шумовой коррекции определяется на основе первого шумового сигнала, а второй сигнал шумовой коррекции определяется на основе второго шумового сигнала; и
громкоговоритель, выполненный с возможностью генерирования звука на основе первого сигнала шумовой коррекции и второго сигнала шумовой коррекции, причем звук передается пользователю по второму пути прохождения звука, отличному от первого пути прохождения звука, при этом указанный громкоговоритель представляет собой громкоговоритель с костной проводимостью, и второй путь прохождения звука представляет собой путь с костной проводимостью.
2. Система по п. 1, в которой вторые шумы включают в себя остаточный звук во внутреннем ухе пользователя.
3. Система по п. 1, в которой второй детектор представляет собой устройство для мониторинга нервной деятельности или устройство для мониторинга мозговых волн.
4. Система по п. 1, дополнительно содержащая один или более фильтров, выполненных с возможностью разложения шумового сигнала на шумовые сигналы одного или более поддиапазонов.
5. Система по любому из пп. 1–4, в которой определение первого сигнала шумовой коррекции на основе первого шумового сигнала содержит:
определение первой передаточной функции для первого пути прохождения звука;
определение второй передаточной функции для второго пути прохождения звука;
определение коэффициента регулирования амплитуды на основе первой передаточной функции и второй передаточной функции; и
определение первого сигнала шумовой коррекции на основе первого шумового сигнала и коэффициента регулирования амплитуды.
6. Система по п. 5, в которой процессор дополнительно выполнен с возможностью определения первой разности во времени между первым звуком, передаваемым по первому пути прохождения звука, и вторым звуком, передаваемым по второму пути прохождения звука.
7. Система по п. 6, в которой определение первой шумовой коррекции на основе первого шумового сигнала содержит:
определение сигнала с инвертированной фазой относительно первого шумового сигнала; и
определение первого сигнала шумовой коррекции на основе первой разности во времени и сигнала с инвертированной фазой.
8. Система по п. 1, в которой определение второго сигнала шумовой коррекции на основе второго шумового сигнала содержит:
определение коэффициента регулирования амплитуды;
определение первой разности во времени между звуковым сигналом, переданным по первому пути прохождения звука, и звуковым сигналом, переданным по второму пути прохождения звука;
определение сигнала с инвертированной фазой относительно второго шумового сигнала; и
определение второго сигнала шумовой коррекции на основе коэффициента регулирования амплитуды, первой разности во времени и сигнала с инвертированной фазой относительно второго шумового сигнала.
| US 20170148428 A1, 25.05.2017 | |||
| US 20150296297 A1, 15.10.2015 | |||
| US 20100296666 A1, 25.11.2010 | |||
| US 20160127815 A1, 05.05.2016 | |||
| СИСТЕМА АКТИВНОГО ШУМОПОДАВЛЕНИЯ И ЕЕ ПРИМЕНЕНИЕ | 2006 |
|
RU2411592C2 |
