Изобретение относится к области анализа изображений и может быть использовано для определения угловой ориентации объектов по их изображениям.
Известен алгоритм оценки преимущественного (доминантного) направления изображения (Asatryan D.G. Gradient-based technique for image structural analysis and applications // Computer Optics. 2019. Vol. 43, No. 2. P. 245-250). Указанный алгоритм содержит следующие основные этапы.
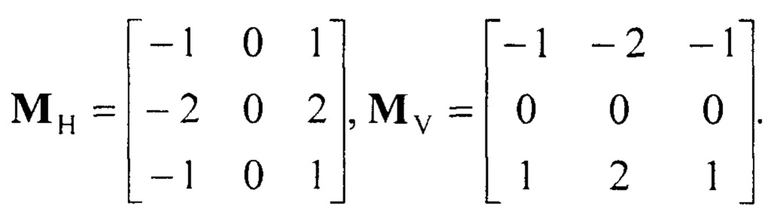
1) Формирование массивов градиентов яркости в горизонтальном GH и вертикальном GV направлениях с использованием линейного двумерного фильтра с масками весовых коэффициентов Собела MH и MV размера 3×3 (Гонсалес Р., Вудс Р. Цифровая обработка изображений. М.: Техносфера, 2006. 1072 с):
2) Оценка математических ожиданий mH и mV и среднеквадратических отклонений σH и σV для массивов градиентов GH и GV соответственно и коэффициента их взаимной корреляции ρHV.
3) Формирование эллипса рассеяния поля градиентов и оценка углового положения α его главной оси (Asatryan D.G., Egiazarian K.О., Kurkchiyan V.V. Orientation estimation with applications to image analysis and registration // Information Theories and Applications. 2010. Vol. 17, No. 4. P. 303-3 11):

Формула (!) позволяет вычислить преимущественную (доминантную) угловую ориентацию объектов на изображении, однако имеет абсолютную погрешность 3°…5°.
13 качестве прототипа выбран наиболее близкий по совокупности признаков способ определения ориентации элементов изображения (патент RU 2491630, опубликовано 20.05.2013, МПК: G06K 9/46 (2006.01)). В данном способе на изображение наносят параллельные секущие линии, которые в процессе анализа пошагово вращают в пределах угла от 0 до 180° относительно горизонтали. При этом для каждого направления определяют среднее значение длины всех элементов изображения по всем секущим линиям, а направление ориентации определяют по максимальному значению средней длины, определенному по всем угловым направлениям секущих линий. Способ прототипа позволяет анализировать не только полутоновые изображения, но и бинарные.
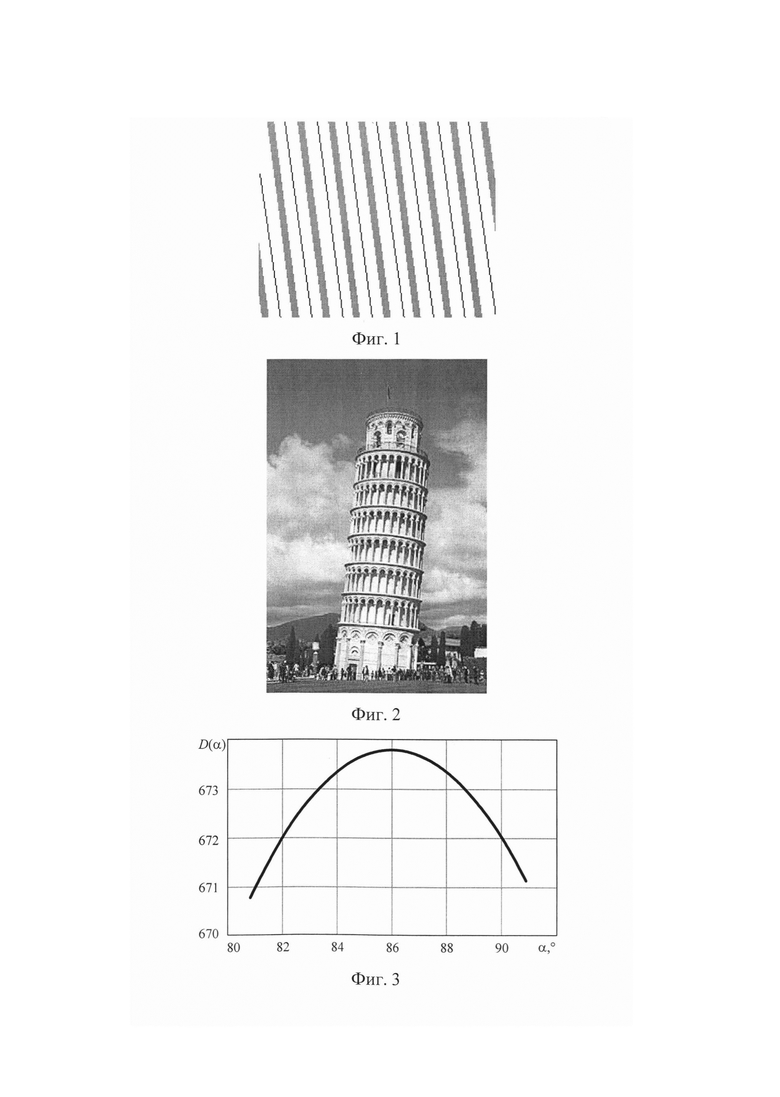
К недостатку способа прототипа следует отнести отсутствие в нем описания принципа выбора шага сечения: при анализе изображений с периодическими текстурами возможны ситуации, когда шаг сечения приблизительно равен периоду изменения яркости текстуры (см. пояснение на фиг. 1, где секущие линии показаны тонкими сплошными линиями черного цвета). В таком случае при соответствующем преимущественной угловой ориентации анализируемого изображения угле наклона секущих линий значение средней длины сечений будет малым или даже равным нулю. Следовательно, угловая ориентация будет оценена неверно.
Другим недостатком способа прототипа является необходимость анализа всего диапазона углов 0°…180°, что при малом шаге перебора (например, 0,1° и менее) приводит к количеству итераций порядка тысяч.
Техническая проблема, решаемая созданием изобретения, заключается в высокой погрешности известных способов оценки угловой ориентации при априорно неизвестном сюжете анализируемого изображения.
Технический результат заявляемого изобретения заключается в снижении погрешности оценивания преимущественной угловой ориентации объектов на изображении.
Технический результат достигается за счет двухэтапного способа оценки преимущественной угловой ориентации: на первом этапе угловая ориентация оценивается приближенно и затем уточняется методом перебора на втором этапе.
Приближенно преимущественная угловая ориентация изображения αгруб оценивается, например, по угловому положению главной оси эллипса рассеяния поля градиентов по аналогии с (Asatryan D.С, EgiazarianK.O., Kurkchiyan V.V. Orientation estimation with applications to image analysis and registration // Information Theories and Applications. 2010. Vol. 17, No. 4. P. 303-311) либо по направлению собственного вектора, соответствующего наибольшему собственному значению ковариационной матрицы градиентов яркости по горизонтали и вертикали по аналогии с (Feng X., Milanfar P. Multiscale principal components analysis for image local orientation estimation // Conf. Record of the 36th Asilomar Conf. on Signals, Systems and Computers. Vol. 1. Pacific Grove, USA, 2002. P. 478-482).
На втором этапе приближенную угловую ориентацию αгруб уточняют. Для этого применяют метод прямого перебора с фиксированным шагом δα в диапазоне [αгруб-0,5Δα, αгруб+0,5Δα], где Δα - диапазон поиска, с использованием обобщенного оператора вычисления градиента для заданного углового направления αi:

где i - номер итерации.
В качестве обобщенного оператора вычисления градиента может выступать, например, оператор свертки с маской Неватиа-Бабу (Nevatia R., Babu K.R. Linear feature extraction and description // Computer graphics and image processing. 1980. Vol. 13. P. 257-269) или оператор вычисления градиента из работы (Kislitsyna Т.S., Kholopov I.S. Generalized compass operator for edge detection with the required angular orientation // in Proc. 10th Mediterranean Conf. on Embedded Computing. Budva, Montenegro, 2021. P. 302-305). При переборе для каждого углового направления αi выполняют следующие действия:
1) для угла αi выполняют расчет элементов маски М(αi) обобщенного оператора вычисления градиента для данного углового направления;
2) выполняют операцию пространственной фильтрации, т.е. свертки исходного изображения I с маской фильтра М(αi):

где ⊗ - обозначение оператора свертки;
3) оценивают дисперсию яркости Di изображения Ii;
4) если текущая оценка дисперсии Di больше предыдущих, то новое уточненное значение αточн=αi.
По окончании процедуры перебора сформированное значение αточн принимается за преимущественную угловую ориентацию объектов на изображении.
Поскольку операторы выделения границ чувствительны к некоррелированному шуму, то перед оцениванием преимущественной ориентации целесообразно также предварительно выполнять свертку исходного изображения с маской фильтра нижних частот, например, гауссовского.
Работу алгоритма иллюстрирует пример с измерением угла наклона Пизанской башни по ее изображению (фиг. 2). Известно, что наклон башни в настоящее время составляет приблизительно αПБ=3,97°, поэтому истинную преимущественную ориентацию изображения, отсчитываемую в направлении против часовой стрелки относительно горизонтали, примем равной αист=90-αПБ=86,03°.
Грубая преимущественная ориентация, определенная по методу главных компонент согласно (Feng X., Milanfar P. Multiscale principal components analysis for image local orientation estimation // Conf. Record of the 36th Asilomar Conf. on Signals, Systems and Computers. Vol. 1. Pacific Grove, USA, 2002. P. 478-482) составляет αгруб=85,58°. Примем размер маски обобщенного оператора вычисления градиента (Kislitsyna Т.S., Kholopov I.S. Generalized compass operator for edge detection with the required angular orientation // in Proc. 10th Mediterranean Conf. on Embedded Computing. Budva, Montenegro, 2021. P. 302-305) равным 5×5, Δα=10° и δα=0,05°. Округлим интервал анализа [80,58°, 90,58°] до десятых долей градуса: [80,6°, 90,6°].
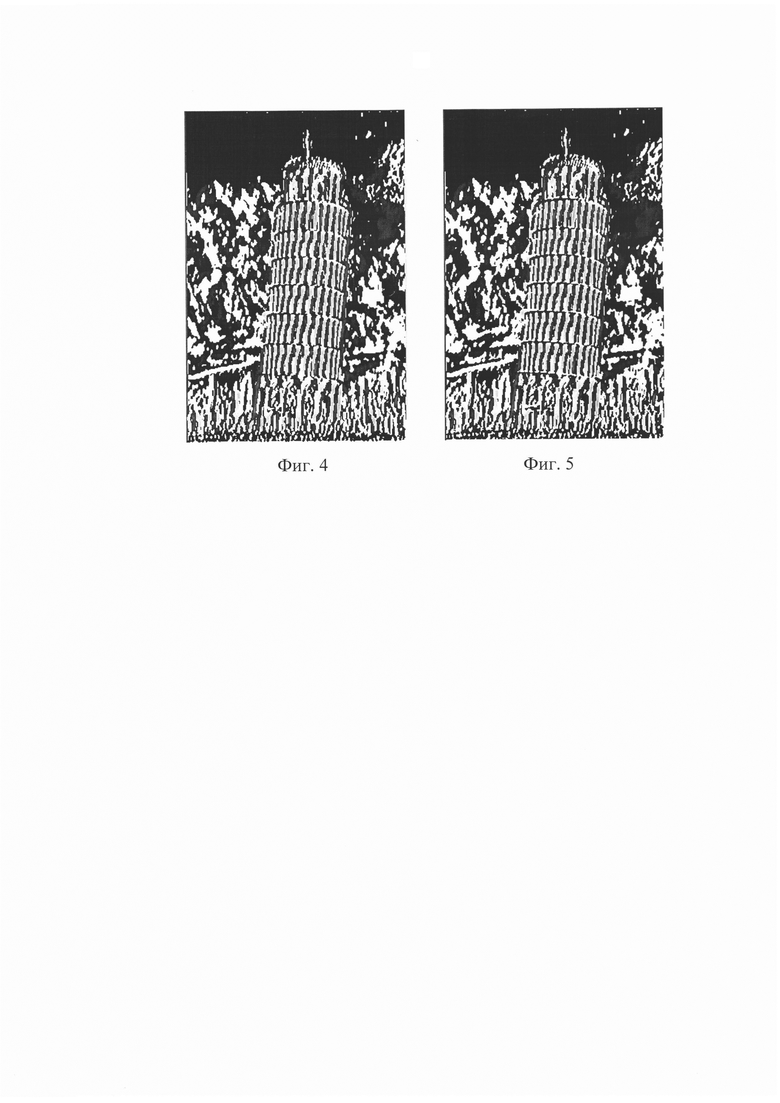
На фиг. 3 показан график зависимости оценки дисперсии Di(αi) для анализируемого интервала, а на фиг. 4 и 5 - результаты свертки изображения фиг. 2 с масками М(αi)=86,05° и 80,6° соответственно.
Наибольшая оценка дисперсии соответствует случаю, когда преимущественная угловая ориентация элементов изображения и значения параметра α для маски обобщенного оператора вычисления градиента совпадают (см. фиг. 3).
Максимальное значение оценки дисперсии Dmax=673,48 соответствует углу αточн=86,05°, т.е. для фиг. 2 согласно предлагаемому способу обеспечивается абсолютная погрешность оценивания преимущественной угловой ориентации изображенного на нем объекта равная 0,02°.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА АРХИВНЫХ ФОТОГРАФИЯХ | 2013 |
|
RU2541920C2 |
| СПОСОБ И УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ ЛОКАЛЬНЫХ ОСОБЕННОСТЕЙ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2535184C2 |
| СПОСОБ ОЦЕНКИ ШУМА ЦИФРОВЫХ РЕНТГЕНОГРАММ | 2011 |
|
RU2441281C1 |
| Способ определения собственных координат по трем визирным светоизлучающим маркерам | 2024 |
|
RU2838123C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ИСКАЖЕНИЙ, ВЫЗВАННЫХ ЭФФЕКТОМ ГИББСА, ПРИ JPEG-КОДИРОВАНИИ | 2008 |
|
RU2365994C1 |
| СПОСОБ УЛУЧШЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2298226C1 |
| СПОСОБ АДАПТИВНОГО СГЛАЖИВАНИЯ ДЛЯ ПОДАВЛЕНИЯ РАСТРОВОЙ СТРУКТУРЫ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2411584C2 |
| СПОСОБ И УСТРОЙСТВО БЫСТРОГО ФИЛЬТРОВАНИЯ ШУМА ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2405200C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОНТУРНОГО ИЗОБРАЖЕНИЯ | 2019 |
|
RU2714381C1 |
| Способ идентификации реперов при решении задачи Р4Р в авиационных оптико-электронных системах позиционирования с единственной камерой | 2020 |
|
RU2749808C1 |
Изобретение относится к области анализа изображений и может быть использовано для определения угловой ориентации объектов по их изображениям. Техническим результатом является снижение погрешности оценивания преимущественной угловой ориентации объектов на изображении. Технический результат достигается тем, что в заявленном решении предусмотрен анализ изображения, в котором направление ориентации пошагово определяется по максимальному значению вычисляемого на каждом шаге показателя, при этом на первом этапе грубо определяют направление ориентации, затем на втором этапе пошагово уточняют его с применением маски обобщенного оператора вычисления градиента яркости, при этом применяют метод прямого перебора угла, а максимизируемым целевым показателем является оценка дисперсии градиента яркости на выходе фильтра с маской оператора вычисления градиента. 5 ил.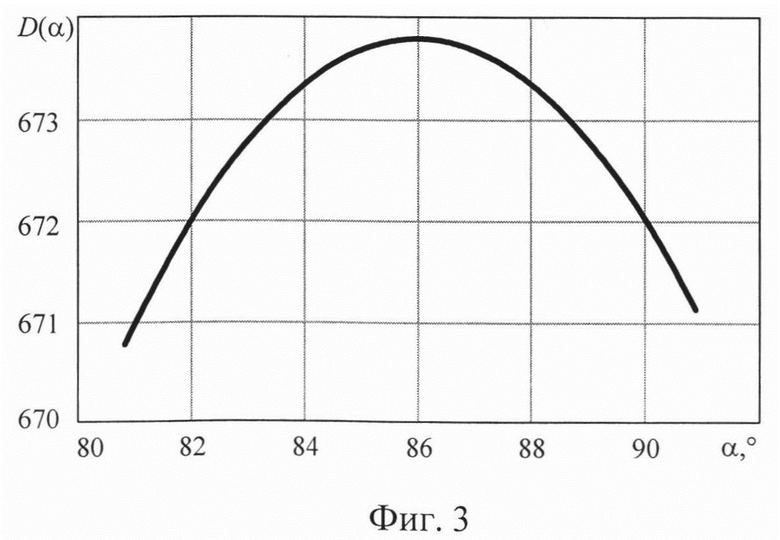
Способ определения преимущественной угловой ориентации элементов цифрового изображения, включающий анализ изображения, в котором направление ориентации пошагово определяется по максимальному значению вычисляемого на каждом шаге показателя, при этом на первом этапе грубо определяют направление ориентации αгруб, затем на втором этапе пошагово уточняют его с применением маски обобщенного оператора вычисления градиента яркости М(αточн), при этом применяют метод прямого перебора угла αточн с фиксированным шагом δα в диапазоне поиска Δα, при этом αточн ∈ [αгруб-0,5Δα, αгруб+0,5Δα], отличающийся тем, что максимизируемым целевым показателем является оценка дисперсии градиента яркости на выходе фильтра с маской оператора вычисления градиента М(αточн).
| KISLITSYNA T.S | |||
| ET AL.: "Generalized Compass Operator for Edge Detection with the Required Angular Orientation", 7-10.06.2021, [найдено:24.01.2023] Найдено в: http://dblib.rsreu.ru/data/publications/8440_text.pdf | |||
| КОЛОМИЕЦ Э.И.: "Методы распознавания образов и анализа изображений", Самарский государственный аэрокосмический университет, 2013 | |||
| RU |
