Изобретение относится к области протезирования и касается конструкции кистевого протеза или протеза предплечья. В частности, речь идет о возможности расширения функциональных свойств протеза за счет обеспечения возможности его агрегатирования дополнительными внешними функциональными устройствами и управления ими.
Из уровня техники известно выполнение на протезе крепления для дополнительных инструментов или оснастки.
Так, известно размещение элементов механического крепления для дополнительных устройств на гильзе или других элементах протеза. Причем элемент механического крепления может быть как частью конструкции протеза (US5464444, WO2019225781, US3802302), так и может быть выполнен в виде отдельного съемного устройства (WO2017182451, US2018161179, US5597189).
Во всех упомянутых решениях отсутствует интерфейс управления дополнительным устройством, что, в частности, ограничивает использование электронных устройств особенно людьми, потерявшими обе руки.
Учитывая сложность обращения с внешними устройствами (гаджетами) в последнее время выявилась тенденция дополнения кистевого протеза или протеза предплечья прикреплением к гильзе протеза внешнего устройства, например, фонарика. Такое решение представлено компанией Моторика (см. сайт «SUPER MOTORICA» компании ООО «Моторика», протез бионический кистевой «CYBI Hand», выложенный в 2021 г. в режиме информационного ознакомления в сети Интернет по адресу https://global.motorica.org/prosthetics/upper-limb/cybi-hand) (копия фрагментов страниц сайта прилагается, приложение ПРОТОТИП).
Бионический кистевой протез состоит из кисти-манипулятора с электродвигателями, обеспечивающими сгибание пальцев, прикрепленную к манипулятору гильзу, одеваемую вместо ампутированной части руки на травмированную руку, ЭМГ-датчики, закрепленные на поверхности ампутированной руки на участках прохождения отдельных мышц, связанные с контроллером, обеспечивающим изменение положения пальцев в зависимости от работы мышц, при этом на наружной поверхности гильзы закреплена накладка с встроенным контроллером для управления электродвигателями, тыльной стороной повторяющая поверхность гильзы и несущая на внешней поверхности два продленных выступа с направляющими, расположенными напротив друг друга, которые образуют посадочное гнездо для установки в это гнездо внешнего устройства типа фонарика.
Это решение принято в качестве прототипа для заявленных объектов.
Недостатком данного решения является то, что крепление внешнего устройства типа фонарика выполнено в виде клинового замка, когда вставляемая часть узла вводится между направляющими и заклинивается за счет трения между стенками. Такие соединения хороши, когда на него не действуют динамические нагрузки, то есть пользователь не машет и не размахивает протезом, не ударяет его случайно, например, о поверхность стола и т.д. При наличии динамического воздействия внутри узла соединения возникают упругие деформационные процессы, которые в координатах раскладки сил действуют как вдоль направляющих узла, так и поперек их. В результате соединение расклинивается и внешнее устройство выходит из клинового взаимодействия и выпадает из гнезда. Ненадежность долговременного и надежного присоединения внешнего устройства создает трудности и неудобства.
Другим недостатком является то, что узел присоединения используется только для ношения внешне прикрепляемого устройства, требующего управления другой рукой или другим человеком-помощником. Включение или выключение внешнего устройства, например, фонарика, осуществляется с помощью штатного приспособления (например, кнопки) на устройстве, имеет ограниченный доступ и требует необходимости применения другой руки или помощи со стороны. В настоящее время созданы схемы интерактивного взаимодействия человека с компьютеризированными средствами, в том числе и в части управления ими. Но режим интерактивного взаимодействия возможен только в условиях, когда аппаратно и программно обе стороны диалога настроены через общий интерфейс. А в известном решении такой интерфейс отсутствует.
Настоящее изобретение направлено на достижение технического результата, заключающегося в повышении эксплуатационных качеств за счет расширения функционала протеза путем обеспечения подключения агрегатируемых на протезе внешних устройств, аппаратно и программно позволяющих обеспечить связь с контроллером протеза.
Указанный технический результат достигается тем, что в протезе, преимущественно кистевом или предплечья, содержащем кисть, связанную с гильзой, надеваемой на травмированную руку вместо ампутированной ее части, встроенный в гильзу или кисть процессорный контроллер для формирования управляющих сигналов, снабженный интерфейсом управления внешним устройством, и узел прикрепления на поверхности гильзы или кисти внешнего устройства, отличающийся тем, что процессорный контроллер выполнен с выходным интерфейсом подключения внешних электронных или электромеханических устройств, при этом на поверхности гильзы или кисти выполнен по крайней мере один узел прикрепления одного внешнего устройства в виде гнезда или посадочного места, представляющего собой ответную часть крепления на внешнем устройстве, а на поверхности этой ответной части размещены контакты для связи присоединяемого внешнего устройства к выходному интерфейсу процессорного контроллера для управления внешним устройством.
Указанный технический результат достигается тем, что узел прикрепления внешнего устройства к протезу, выполненному по п. 1, содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним, при этом на посадочном месте ответной части размещены неодимовые магниты и сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, а часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению неодимовых магнитов и контактов.
Указанный технический результат достигается тем, что узел прикрепления внешнего устройства к протезу, выполненному по п. 1, содержит часть в виде планки Пикатини или Вивера, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и ответную форме планки Пикатини или Вивера часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним, при этом на гильзе или кисти на посадочном месте планки Пикатини или Вивера сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, а часть узла прикрепления, располагаемая на внешнем устройстве, повторяет схему расположения контактов на планке Пикатини или Вивера.
Указанный технический результат достигается тем, что узел прикрепления внешнего устройства к протезу, выполненному по п. 1, выполнен в виде байонетного крепления и содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним, при этом на посадочном месте ответной части размещен магнит, фиксирующий закрепленное положение части на внешнем устройстве, и сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, а часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению магнита магнитов и контактов.
Указанный технический результат достигается тем, что узел прикрепления внешнего устройства к протезу, выполненному по п. 1, выполнен в виде соединения «ласточкин хвост» и содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним, при этом на посадочном месте ответной части сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, и по крайней мере один магнит, фиксирующий положение части на внешнем устройстве по отношению к схеме расположения магнитов, а часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению магнитов и контактов.
Узел прикрепления внешнего устройства выполненный в виде гнезда или посадочного места, может представлять собой ответную часть магнитного крепления или байонетного крепления или выполнен в виде планки Пикатини или Вивера или выполнен в виде «ласточкина хвоста».
Протез может содержать размещаемые на поверхности руки ЭМГ-датчики. Интерфейс процессорного контроллера для управления внешним устройством может быть выполнен в виде миоинтерфейса или нейроинтерфейса.
Интерфейс процессорного контроллера протеза для управления внешним устройством может содержать сенсорную панель, размещаемую на поверхности гильзы или кисти.
Процессорный контроллер может быть выполнен с возможностью загрузки программных приложений внешних устройств, а также выгрузки данных, файлов, статистики и мониторинга в реальном времени, по беспроводной связи в режиме WiFi или Bluetooth.
Интерфейс процессорного контроллера протеза для управления внешним устройством может содержать по крайней мере одну кнопку, размещаемую на поверхности гильзы или кисти или узла прикрепления внешнего устройства.
При этом для всех вариантов исполнения узла прикрепления внешнего устройства к протезу контакты на ответной части и/или на части закрепляемой на внешнем устройстве выполнены подпружиненными.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретными примерами исполнения, которые, однако, не являются единственно возможными, но наглядно демонстрируют возможность достижения требуемого технического результата.
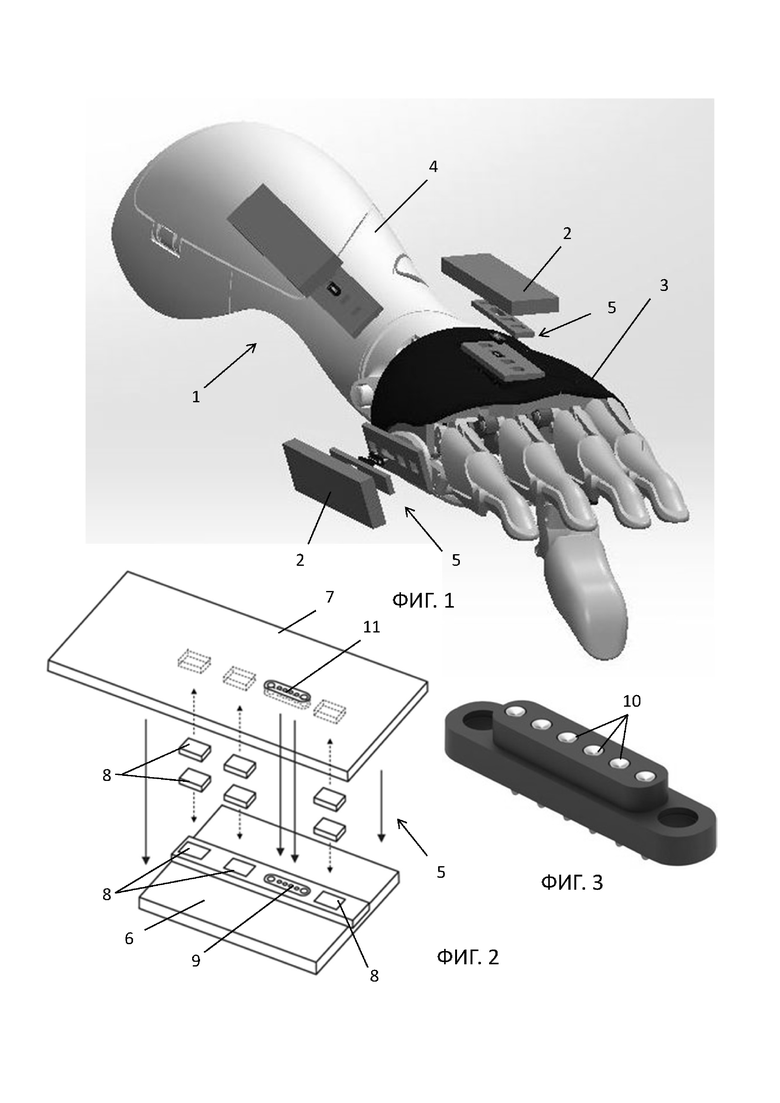
На фиг. 1 - общий вид протеза с узлами прикрепления на магнитах;
фиг. 2 - схема построения узла прикрепления на магнитах;
фиг. 3 - общий вид контактной площадки с подпружиненными контактами;
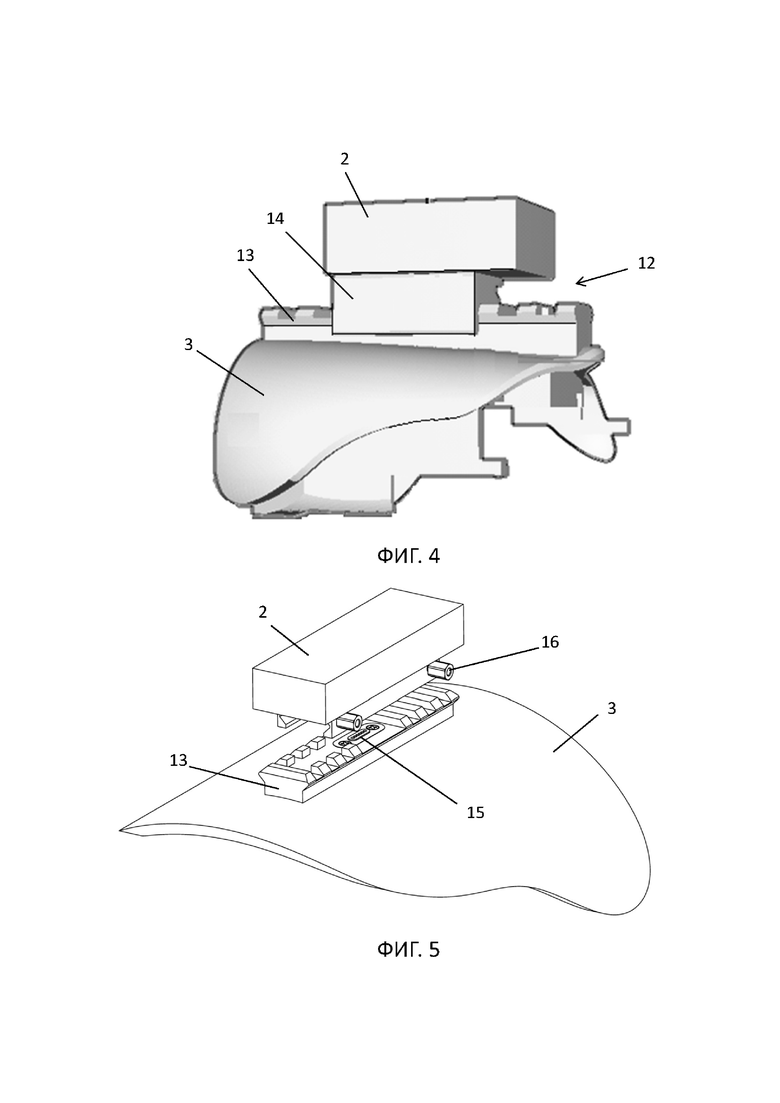
фиг. 4 - узел прикрепления в виде планки Пикатини;
фиг. 5 - то же, что на фиг. 4, компоновка элементов узла;
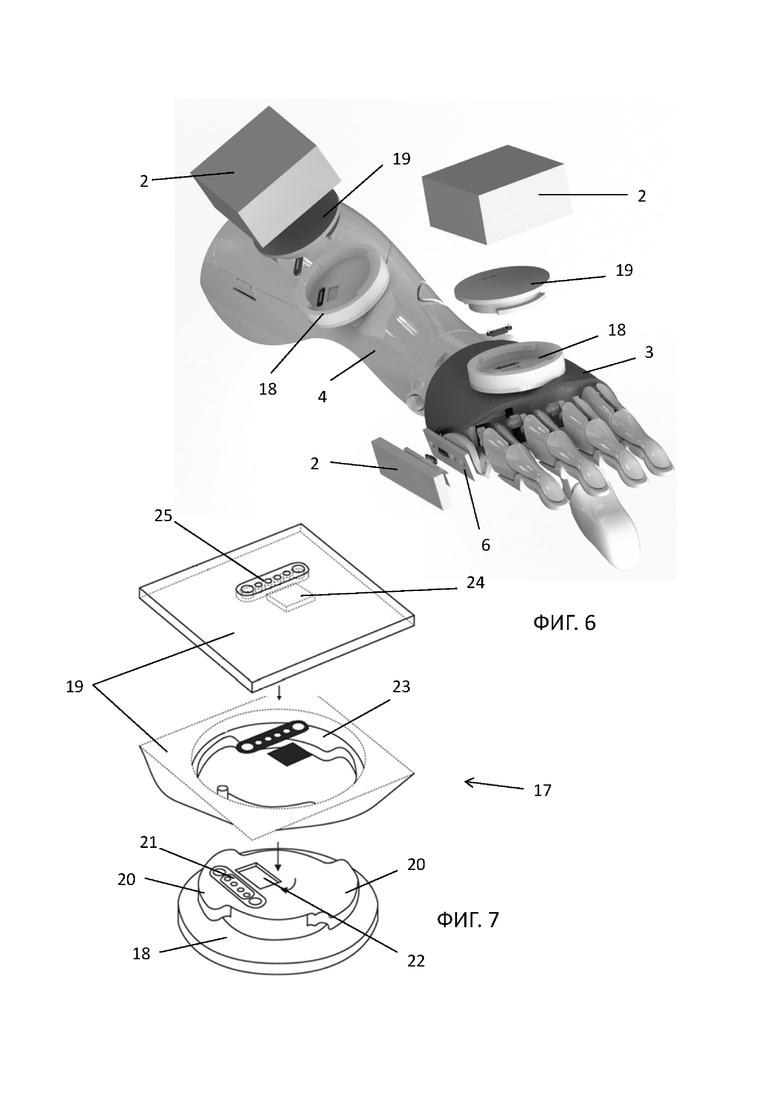
фиг. 6 - общий вид протеза с байонетным узлом прикрепления;
фиг. 7 - схема построения байонетного узла прикрепления, первый вариант выполнения схемы;
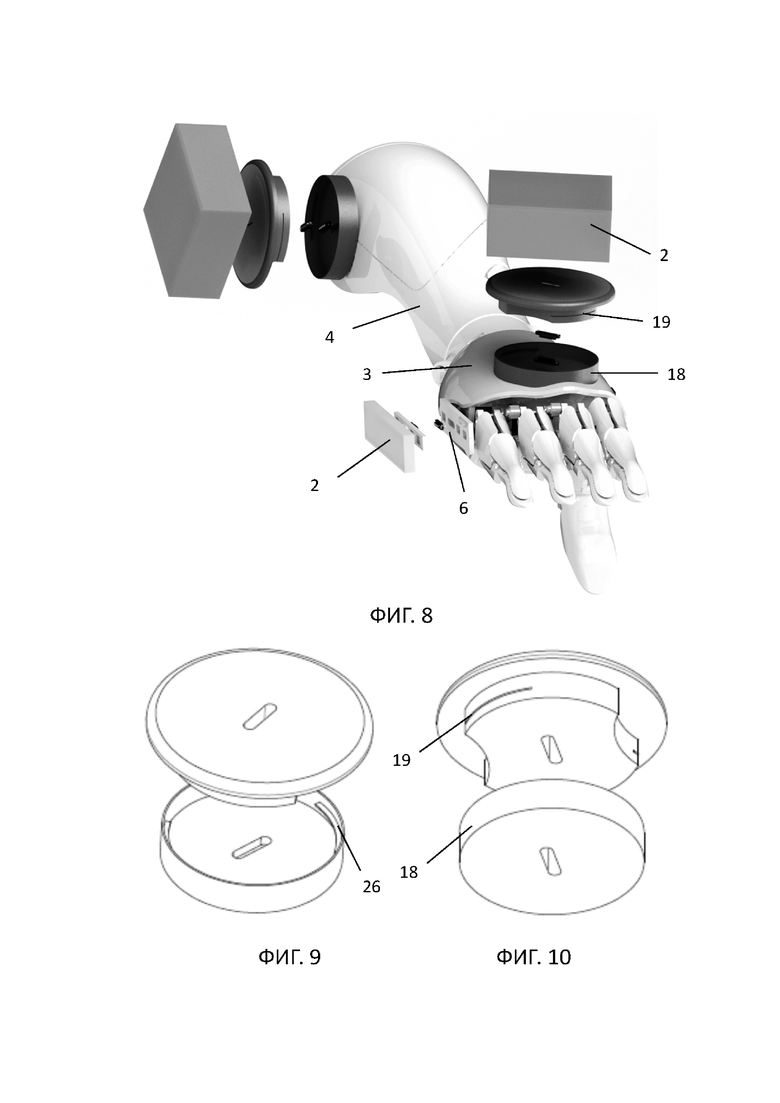
фиг. 8 - схема построения байонетного узла прикрепления, второй вариант выполнения схемы;
фиг. 9 - общий вид протеза с байонетным узлом прикрепления по третьему варианту выполнения;
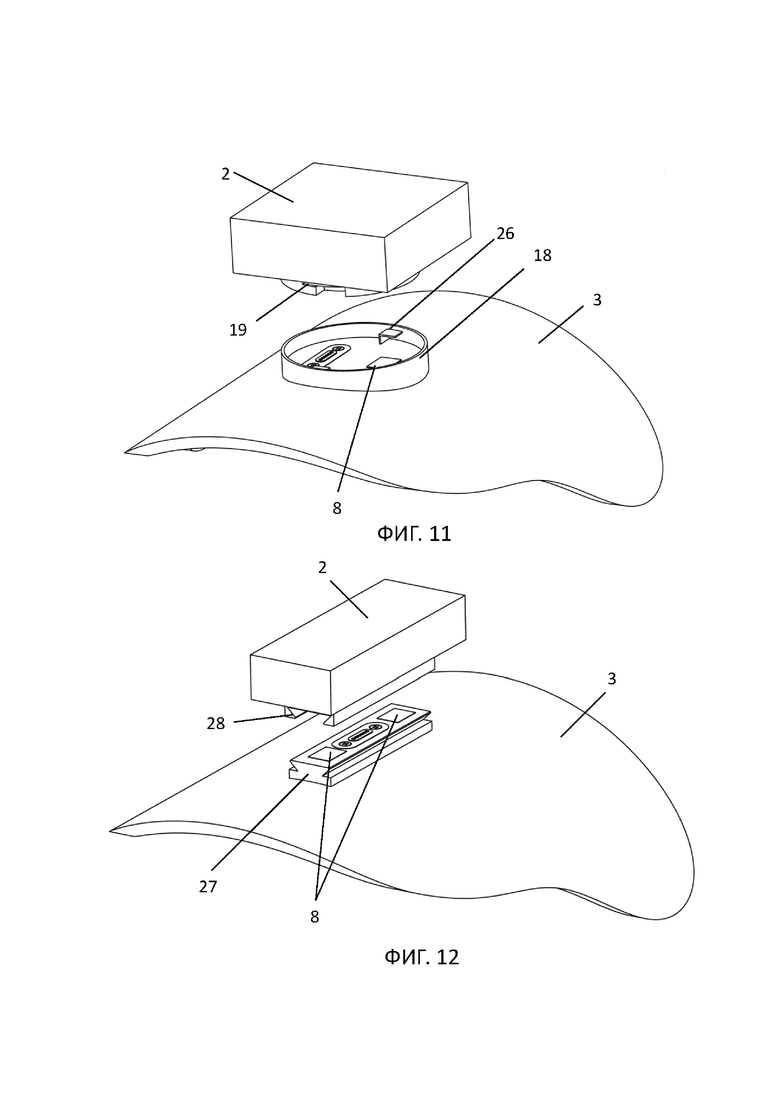
фиг. 10, 11 - схема построения байонетного узла прикрепления, третий вариант выполнения схемы;
фиг. 12 - схема построения узла прикрепления типа «ласточкин хвост».
Согласно настоящему изобретению рассматривается конструкция кистевого протеза 1 или протеза предплечья, выполненного с возможностью надежного прикрепления на него внешнего периферического устройства 2 типа гаджета и с возможностью интерактивной связи с процессорным контроллером управления исполнительными механизмами подвижности пальцев. Протез содержит кисть-манипулятор 3 связанную с гильзой 4, надеваемую на ампутированную руку, встроенный в гильзу процессорный контроллер для формирования управляющих сигналов и узел прикрепления на поверхности гильзы внешнего периферического устройства.
В общем случае конструктивный алгоритм построения протеза состоит в следующем:
- процессорный контроллер выполнен с выходным интерфейсом подключения внешних электронных или электромеханических периферических устройств 2;
- на поверхности гильзы 4 или кисти 3 выполнен по крайней мере один узел 5 прикрепления одного внешнего устройств 2 в виде гнезда или посадочного места, представляющее собой ответную часть магнитного крепления или байонетного крепления или выполнено в виде планки Пикатини или Вивера или выполнено в виде «ласточкина хвоста»;
- на поверхности этой ответной части размещены контакты для связи присоединяемого внешнего устройства через соответствующее приложение к выходному интерфейсу процессорного контроллера и к питанию.
Крепление модулей (внешних периферических устройств) помимо фиксирующего механизма имеет несколько контактов для управления внешним устройством посредством команд, подаваемых процессорным контроллером протеза, а также контакты для питания. Таким образом, внешнее устройство становится интегрированным в энергосистему протеза, а также может управляться при помощи мобильного приложения, кнопок на самом протезе или же миокоманд через миоинтерфейс или нейроинтерфейс.
Миоинтерфейс (ЭМГ - электромиография) - способ управления внешним устройством, основанный на снятии электромагнитных сигналов с мышц человека посредством поверхностных электродов. Выделенные сигналы преобразуются в команды для устройства, которые могут передаваться дистанционно на различные устройства, например, исполнительным механизмам, обеспечивающим подвижность пальцев. Миоинтерфейс состоит из ЭМГ-датчиков, контроллера, который обрабатывает данные от датчиков. Количество датчиков и интерфейсов может меняться, как и сами датчики и интерфейсы в зависимости от потребностей конкретного применения.
Нейроинтерфейс (или интерфейс «мозг - компьютер») - система для обмена информации между мозгом человека и электронным устройством. Самый распространенный пример - прибор для электроэнцефалограммы (ЭЭГ). ЭЭГ интерфейс состоит из нейроинтерфейса (НИ), например, присутствующего и доступного на рынке нейроинтерфейса Emotiv Insight либо Emotiv Epoc+, контроллера, который обрабатывает данные от НИ.
Внешним периферическим устройством может быть любое электронное или электромеханическое устройство, как например фонарь, электрошокер, зажигалка, устройство для самообороны (распылитель перцового спрея), лазерная указка, модуль NFC для бесконтактной оплаты, телефон, а также иные устройства. Крепление может размещаться и на самой гильзе, как сверху, так и снизу (например, для модифицированной компьютерной мыши).
Оснащение процессорного контроллера такой функцией, как выходной интерфейс, позволяет через него загружать (инсталлировать) приложения, на которых работает внешнее устройство или посредством которого это внешнее устройство становится синхронизированным с этим контроллером. Процессорный контроллер может быть выполнен с возможностью загрузки данных программных приложений внешних устройств по беспроводной связи в режиме WiFi или Bluetooth.
Это позволяет использовать нейро- или мио-сигналы на участке отдельной мышцы или совокупные сигналы с нескольких мышц пользователя в качестве управляющего сигнала на включение приложения и соответственно на включение функционала внешнего устройства. То есть для работы с внешним устройством использован тот же принцип управления через миоинтерфейс или нейроинтерфейс, но через приложение внешнего устройства.
Интерфейс процессорного контроллера для управления внешним устройством также может быть выполнен в виде сенсорной панели или кнопок, размещаемых на поверхности кисти или гильзы (не показано на рисунках). Сенсорная панель или кнопки располагаются так, чтобы обеспечить удобный доступ и простое управление для людей с ограниченными возможностями, в том числе потерявшими обе руки.
Ниже рассматриваются примеры исполнения изобретения.
Общим для всех примеров реализации является то, что на поверхности гильзы или кисти выполнен по крайней мере один узел прикрепления внешнего устройства в виде гнезда или посадочного места, представляющее собой ответную часть магнитного крепления или байонетного крепления или выполненного в виде планки Пикатини или Вивера или выполненного в виде «ласточкина хвоста», а на поверхности этой ответной части размещены контакты для связи присоединяемого внешнего устройства через соответствующее приложение к выходному интерфейсу процессорного контроллера для управления внешним устройством и к питанию.
На фиг. 1 в качестве примера представлен бионический протез. Особенностью этого типа протеза является наличие ЭМГ-датчиков и приводных электродвигателей для каждого пальца или сразу нескольких пальцев (несколько пальцев могут управляться одним двигателем), обеспечивающих по сигналам указанных датчиков подвижность пальцев. Представленный, протез содержит кисть-манипулятор и запястье связанные с гильзой, надеваемой на ампутированную руку, а так же размещаемые на поверхности руки ЭМГ-датчики и размещенные в кисти-манипуляторе приводные электродвигатели для пальцев, обеспечивающие по сигналам указанных датчиков подвижность пальцев, встроенный в гильзу процессорный контроллер для формирования управляющих сигналов для указанных приводных двигателей и внешнего устройства в соответствии с полученными сигналами от ЭМГ-датчиков и узел прикрепления на поверхности гильзы или кисти внешнего периферического устройства. Сигналы в процессорный контроллер помимо или вместо ЭМГ-датчиков могут поступать и с ЭЭГ-датчиков, размещаемых непосредственно на голове. Конкретное конструктивное исполнение такого бионического протеза и его программно-аппаратное функционирование для формирования подвижности пальцев в рамках настоящей заявки не рассматривается.
На фиг. 1 - 3 представлена конструкция узла прикрепления к кисти 3 и гильзе 4 протеза внешнего устройства, которое содержит ответную часть 6, закрепляемую на гильзе 4 и кисти 3 протеза или выполненную заодно с этой гильзой, и часть 7, закрепляемую на подлежащем прикреплению внешнем устройстве 2 или выполненную заодно с ним.
На посадочном месте ответной части 6 размещены неодимовые магниты 8 и сформирована контактная площадка 9 (фиг. 2), на поле которой расположены контакты 10 связи с питанием и процессорным контроллером. Часть 7 узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению неодимовых магнитов и контактов. При этом магниты на обеих частях располагаются напротив друг друга для обеспечения надежного позиционирования одной части относительно другой. Неодимовый магнит обладает сильной притягивающей силой, которую тяжело разорвать. Известен своей высокой мощностью притяжения при чрезвычайно малых размерах (эффективность создаваемого магнитного поля выше, чем у ферритовых и постоянных магнитов примерно в 10 раз) и высокой стойкостью к размагничиванию. Неодимовые магниты долговечны и стабильны, теряют 0.1-2% своей намагниченности за 10 лет (5% за 100 лет). Это позволяет надежно фиксировать части без последствий их случайного разъединения. Для точного позиционирования и с тем, чтобы силы притяжения магнитов не смещали попадание контактов друг на друга, контактная площадка (фиг. 3) с контактами 10 на ответной части выполнена выступающей над полем посадочного места, а на части, закрепляемой на внешнем устройстве - контактная площадка 11 выполнена утопленной. Боковые стенки выступающей части контактной площадки выполняют функцию направляющей для точного позиционирования контактов в момент соединения частей узла. Надежность связи контактов может быть усилена за счет того, что контакты 10 на ответной части подпружинены в сторону прижатия к контактам на внешнем устройстве. Также могут быть подпружинены и контакты на внешнем устройстве. В конструкции этого узла возможен вариант исполнения, когда выступающая контактная площадка выполнена на части, связанной с внешним устройством, а утопленная контактная площадка - с ответной частью на гильзе. При поднесении внешнего устройства к ответной части происходит насаживание контактных площадок друг на друга и защелкивание магнитов между собой. Это происходит даже в случаях, когда площадки не точно попали друг на друга. Автоматическое выравнивание происходит за счет того. что на одной стороне от контактной площадки закреплено два неодимовых магнита. А с другой стороны этой площадки - один такой магнит. При несовпадении разница в силах магнитного взаимодействия приводит к тому, что два магнита всегда стараются попасть друг на друга и это взаимодействие приводит к смещению контактной площадки на внешнем устройстве до момента ее попадания на контакты ответной площадки.
На фиг. 4 и 5 представлена конструкция узла 12 прикрепления к протезу внешнего устройства 2 с применением планки 13 Пикатини или Вивера. Эта планка 13 закрепляется на поверхности кисти 3 протеза (или может быть выполнена заодно с ней). Планка отличается Т-образным профилем в поперечном сечении и рядом зубчатых выступов по длине основания планки. Ответная часть 14 под этот профиль, усаживаемая на профиль планки 13, закрепляется на внешнем устройстве 2 (или может быть выполнена заодно с ней), которое предназначено для применения на протезе. При этом на гильзе на посадочном месте планки 13 Пикатини или Вивера сформирована контактная площадка 15 по аналогии с контактной площадкой, описание которой было дано применительно к примеру исполнения по фиг. 2 и 3. На поле площадки 15 на планке 13 Пикатини между рядами зубчатых выступов расположены контакты связи с питанием и процессорным контроллером. Ответная часть 14 узла прикрепления, располагаемая на внешнем устройстве 2, повторяет схему расположения контактов на планки Пикатини или Вивера и имеет профиль с зубцами, располагаемыми во впадинах между зубчатыми выступами на планке 13.
Особенностью этого типа крепления является то, что контакты на любой площадке так же могут быть подпружинены. Но скрепление планки 13 с ответной частью 14 происходит посредством крепежных фиксирующих винтов 16.
На фиг. 6 и 7 представлен пример исполнения узла прикрепления к протезу внешнего устройства в виде байонетного крепления 17, которое содержит ответную часть 18, закрепляемую на кисти 3 и гильзе 4 протеза или выполненную заодно с ними, и часть 19, закрепляемую на подлежащем прикреплению внешнем устройстве 2 или выполненную заодно с ним.
Ответная часть 18 в общем случае представляет собой цилиндрическое возвышение, в верхней части которого выполнены два радиально направленных выступа 20 или бурта так, что под выступающими частями этих выступов имеется свободное место в направлении к основанию цилиндрического возвышения. На поле возвышения, также как и в ранее рассмотренных примерах исполнения похожих узлов, расположена контактная площадка 21 (контакты связи с питанием и процессорным контроллером) и магнит 22. А часть 19 узла, входящая в зацепление с ответной частью 18, выполнена с цилиндрическим глухим отверстием или углублением, на стенке которого выполнены радиально направленные выступы 23. При насаживании части 19 на цилиндрическое возвышение выступы 23 размещают между выступами 20, а затем проворотом части 19 вводят выступы 23 в зону под выступы 20 с контактным их взаимодействием. При этом на часть 19 узла так же присутствует магнит 24 и ответная контактная площадка 25. В момент фиксации проворотом частей 18 и 19 магниты позиционируются напротив друг друга в положении, при котором контакты площадок позиционно совпадают.
В этом примере исполнения контакты на одной части могут быть так же подпружинены в сторону прижатия к контактам на другой части.
А на фиг. 8-11 показаны другие примеры исполнения байонетного соединения и протеза с такими соединениями. Их отличием от конструкции по фиг. 7 является то, что на ответной части 18 использованы выступы 26, а на части 19 узла выполнен вход этого выступа в полость части 19. В примере представленном на фиг.11 выступ 26 имеет L-образный профиль, а для более надежной фиксации используется магнит 8. При провороте части 19 относительно части 18 происходит клиновая фиксация выступа в полости части 19. В остальном конструкция этого узла повторяет конструкцию узла по фиг. 7.
На фиг. 12 показан пример исполнения узла прикрепления к протезу внешнего устройства в виде соединения «ласточкин хвост». Узел содержит ответную часть 27, закрепляемую на гильзе 2 протеза или выполненную заодно с этой гильзой, и часть 28, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним. Часть 27 представляет собой площадку с угловыми направляющими, а часть 28 - площадку с элементами, ответными этим направляющим. Часть 28 по направляющим сдвигают до упора или до установленного предела и фиксируют в этом положении. В остальном в части наличия контактных площадок и их контактов и магнитов этот пример повторяет пример исполнения по фиг. 2. Фиксация внешнего устройства на части 27 происходит за счет магнитного взаимодействия с помощью магнитов 8.
Изобретение позволяет повысить эксплуатационные качества протеза за счет расширения его функционала путем обеспечения подключения агрегатируемых на протезе внешних устройств, аппаратно и программно позволяющих обеспечить связь с этим контроллером. Кроме того, при агрегатировании обеспечивается надежное прикрепление внешних устройств, не позволяющее этим устройствам отсоединяться и нарушать контактное их подключение к контроллеру протеза. Кроме того, агрегатирование внешних устройств может использовать не только однотипные узлы присоединения, но и разные конструкции узлов на одном протезе (фиг. 6, 8).
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротатор протеза кисти руки | 2020 |
|
RU2765338C1 |
| Устройство для тестирования полей зрения для очков (варианты) | 2023 |
|
RU2820880C1 |
| Узел фиксации цевья и газовой трубки с интегрированной планкой длинноствольного оружия | 2023 |
|
RU2823365C1 |
| Сошка для огнестрельного оружия | 2022 |
|
RU2791338C1 |
| ЛАЙНЕР ПРОТЕЗА, СИСТЕМА ПРИЕМНОЙ ГИЛЬЗЫ ПРОТЕЗА С ЛАЙНЕРОМ ПРОТЕЗА И ПРИЕМНОЙ ГИЛЬЗОЙ ПРОТЕЗА | 2014 |
|
RU2655274C2 |
| Протез бедра | 1987 |
|
SU1442209A1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА СТОПЫ | 2014 |
|
RU2587956C2 |
| Узел для крепления дополнительных приспособлений на стрелковом оружии | 2024 |
|
RU2820744C1 |
| Протез кисти | 1979 |
|
SU848021A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
Группа изобретений относится к медицинской технике, а именно к протезированию и узлам прикрепления внешних устройств к протезам. Протез, преимущественно кистевой или предплечья, содержит кисть, связанную с гильзой, надеваемой на травмированную руку вместо ампутированной ее части, встроенный в гильзу или кисть процессорный контроллер для формирования управляющих сигналов, снабженный интерфейсом управления внешним устройством, и узел прикрепления на поверхности гильзы или кисти внешнего устройства. Процессорный контроллер выполнен с выходным интерфейсом подключения внешних электронных или электромеханических устройств. На поверхности гильзы или кисти выполнен по крайней мере один узел прикрепления одного внешнего устройства в виде гнезда или посадочного места, представляющего собой ответную часть крепления на внешнем устройстве. На поверхности этой ответной части размещены контакты для связи присоединяемого внешнего устройства к выходному интерфейсу процессорного контроллера для управления внешним устройством. Узел прикрепления внешнего устройства к протезу содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним. На посадочном месте ответной части размещены неодимовые магниты и сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером. Часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению неодимовых магнитов и контактов. Узел прикрепления внешнего устройства к протезу содержит часть в виде планки Пикатини или Вивера, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и ответную форме планки Пикатини или Вивера часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним. На гильзе или кисти на посадочном месте планки Пикатини или Вивера сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером. Часть узла прикрепления, располагаемая на внешнем устройстве, повторяет схему расположения контактов на планки Пикатини или Вивера. Узел прикрепления внешнего устройства к протезу выполнен в виде байонетного крепления и содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним. На посадочном месте ответной части размещен магнит, фиксирующий закрепленное положение части на внешнем устройстве, и сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером. Часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению магнитов и контактов. Узел прикрепления внешнего устройства к протезу выполнен в виде соединения «ласточкин хвост» и содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним. На посадочном месте ответной части сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, и по крайней мере один магнит, фиксирующий положение части на внешнем устройстве по отношению к схеме расположения магнитов. Часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению магнитов и контактов. Техническим результатом является повышение эксплуатационных качеств за счет расширения функционала протеза путем обеспечения подключения агрегатируемых на протезе внешних устройств, аппаратно и программно позволяющих обеспечить связь с контроллером протеза. 5 н. и 10 з.п. ф-лы, 12 ил.
1. Протез, преимущественно кистевой или предплечья, содержащий кисть, связанную с гильзой, надеваемой на травмированную руку вместо ампутированной ее части, встроенный в гильзу или кисть процессорный контроллер для формирования управляющих сигналов, снабженный интерфейсом управления внешним устройством, и узел прикрепления на поверхности гильзы или кисти внешнего устройства, отличающийся тем, что процессорный контроллер выполнен с выходным интерфейсом подключения внешних электронных или электромеханических устройств, при этом на поверхности гильзы или кисти выполнен по крайней мере один узел прикрепления одного внешнего устройства в виде гнезда или посадочного места, представляющего собой ответную часть крепления на внешнем устройстве, а на поверхности этой ответной части размещены контакты для связи присоединяемого внешнего устройства к выходному интерфейсу процессорного контроллера для управления внешним устройством.
2. Протез по п. 1, отличающийся тем, что узел прикрепления внешнего устройства в виде гнезда или посадочного места представляет собой ответную часть магнитного крепления или байонетного крепления или выполнен в виде планки Пикатини или Вивера или выполнен в виде «ласточкина хвоста».
3. Протез по п. 1, отличающийся тем, что интерфейс процессорного контроллера для управления внешним устройством выполнен в виде миоинтерфейса или нейроинтерфейса.
4. Протез по п. 1, отличающийся тем, что содержит ЭМГ-датчики, размещаемые на поверхности руки.
5. Протез по п. 1, отличающийся тем, что интерфейс процессорного контроллера для управления внешним устройством содержит сенсорную панель, размещаемую на поверхности гильзы или кисти.
6. Протез по п. 1, отличающийся тем, что интерфейс процессорного контроллера для управления внешним устройством содержит по крайней мере одну кнопку, размещаемую на поверхности гильзы или кисти или узла прикрепления внешнего устройства.
7. Протез по п. 1, отличающийся тем, что процессорный контроллер выполнен с возможностью загрузки программных приложений для управления внешних устройств, а также выгрузки данных, файлов, статистики и мониторинга в реальном времени по беспроводной связи в режиме WiFi или Bluetooth.
8. Узел прикрепления внешнего устройства к протезу, выполненному по пп. 1-4, характеризующийся тем, что он содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним, при этом на посадочном месте ответной части размещены неодимовые магниты и сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, а часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению неодимовых магнитов и контактов.
9. Узел прикрепления по п. 8, отличающийся тем, что контакты на ответной части и/или на части закрепляемой на внешнем устройстве выполнены подпружиненными.
10. Узел прикрепления внешнего устройства к протезу, выполненному по пп. 1-4, характеризующийся тем, что он содержит часть в виде планки Пикатини или Вивера, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и ответную форме планки Пикатини или Вивера часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним, при этом на гильзе или кисти на посадочном месте планки Пикатини или Вивера сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, а часть узла прикрепления, располагаемая на внешнем устройстве, повторяет схему расположения контактов на планки Пикатини или Вивера.
11. Узел прикрепления по п. 10, отличающийся тем, что контакты на ответной части и/или на части, закрепляемой на внешнем устройстве, выполнены подпружиненными.
12. Узел прикрепления внешнего устройства к протезу, выполненному по пп. 1-4, характеризующийся тем, что он выполнен в виде байонетного крепления и содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним, при этом на посадочном месте ответной части размещен магнит, фиксирующий закрепленное положение части на внешнем устройстве, и сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, а часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению магнитов и контактов.
13. Узел прикрепления по п. 12, отличающийся тем, что контакты на ответной части и/или на части, закрепляемой на внешнем устройстве, выполнены подпружиненными.
14. Узел прикрепления внешнего устройства к протезу, выполненному по пп. 1-4, характеризующийся тем, что он выполнен в виде соединения «ласточкин хвост» и содержит ответную часть, закрепляемую на гильзе или кисти протеза или выполненную заодно с этой гильзой или кистью, и часть, закрепляемую на подлежащем прикреплению внешнем устройстве или выполненную заодно с ним, при этом на посадочном месте ответной части сформирована контактная площадка, на поле которой расположены контакты связи с питанием и процессорным контроллером, и по крайней мере один магнит, фиксирующий положение части на внешнем устройстве по отношению к схеме расположения магнитов, а часть узла прикрепления, располагаемая на внешнем устройстве, повторяет конструкцию ответной части по расположению магнитов и контактов.
15. Узел прикрепления по п. 14, отличающийся тем, что контакты на ответной части и/или на части, закрепляемой на внешнем устройстве, выполнены подпружиненными.
| US 2021049928 A1, 18.02.2021 | |||
| CN 111437081 A, 24.07.2020 | |||
| WO 2018004285 A1, 04.01.2018 | |||
| US 20210236306 A1, 05.08.2021 | |||
| Интернет-страница URL: https://makershive.io, дата размещения 09 сентября 2021 года; дата размещения подтверждена по адресу Интернет-архива: URL: https://web.archive.org/web/20210909182520/https://makershive.io | |||
| Интернет-страница |

