Область техники, к которой относится изобретение
Настоящий документ относится к технологиям кодирования и декодирования видео и изображений.
Уровень техники
Цифровое видео занимает наибольшую долю полосы частот в сети Интернет и в других цифровых сетях связи. Поскольку число присоединенных пользовательских устройств, способных принимать и представлять видео на дисплее, увеличивается, ожидается, что потребности в полосе для использования цифровым видео будут продолжать расти.
Раскрытие сущности изобретения
Предлагаемая технология может быть использована в вариантах декодирующих устройств или кодирующих устройств для видео или изображений, в которых применяется комбинированный режим кодирования с внутрикадровым и межкадровым прогнозированием.
Согласно одному примерному аспекту предложен способ обработки видео. Способ содержит этапы, на которых определяют режим кодирования первого видеоблока; ограничивают один или более флагов рабочим состоянием на основе результата определения режима кодирования первого видеоблока, причем рабочее состояние может быть ложным или истинным; и выполняют дальнейшую обработку второго видеоблока в соответствии с рабочим состоянием указанного одного или более флагов, причем первый видеоблок является соседним видеоблоком или опорным видеоблоком относительно второго видеоблока.
Согласно другому примерному аспекту способ обработки видео содержит этапы, на которых определяют использование попарного прогнозирования или комбинированного двунаправленного прогнозирования относительно первого видеоблока; определяют рабочее состояние комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (combined inter-intra prediction (CIIP)) на основе определения, что используется попарное прогнозирование или комбинированное двунаправленное прогнозирование, причем рабочее состояние активизировано или не активизировано; и выполняют дальнейшую обработки первого видеоблока в соответствии с рабочим состоянием режима прогнозирования CIIP.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этап, на котором выполняют преобразование между видеоблоком видео и кодированным представлением видеоблока с использованием комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием, причем кодированное представление соответствует взвешенному среднему результатов внутрикадрового прогнозирования и межкадрового прогнозирования для указанного видеоблока с применением пары весовых коэффициентов из набора пар весовых коэффициентов, имеющего менее трех пар.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этап, на котором выполняют преобразование между видеоблоком видео и кодированным представлением видеоблока с использованием комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием, при этом кодированное представление соответствует взвешенному среднему результатов внутрикадрового прогнозирования и межкадрового прогнозирования для указанного видеоблока с применением пары весовых коэффициентов из набора пар весовых коэффициентов, определяемых в соответствии с информацией о кодировании одного или более соседних блоков.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этап, на котором определяют, в процессе преобразования между первым блоком данных видео и представлением первого блока в виде потока битов данных, один или более режимов кодирования для одного или более вторых блоков; определяют, на основе указанного одного или более режимов кодирования для указанного одного или более вторых блоков, ограничение режима кодирования для первого блока; и выполняют, по меньшей мере путем применения ограничения для режима кодирования для первого блока, указанное преобразование; причем указанный один или более вторых блоков содержат по меньшей мере одно из смежного блока, несмежного блока и/или опорного блока для указанного первого блока.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этап, на котором выполняют преобразование между текущим блоком в данных видео и представлением текущего блока в виде потока битов данных с использованием по меньшей мере одного из комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), рассеивающей фильтрации, двусторонней фильтрации, фильтрации в преобразованной области или какого-либо другого типа пост-реконструкционной фильтрации, отличного от рассеивающей фильтрации, двусторонней фильтрации и фильтрации в преобразованной области, причем реконструированные соседние отсчеты текущего блока, используемые по меньшей мере в одном из комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), режима рассеивающей фильтрации, режима двусторонней фильтрации, режима фильтрации в преобразованной области или режима пост-реконструкционной фильтрации какого-либо другого типа, заменены аппроксимированными отсчетами, генерируемыми из соответствующих отсчетов реконструированных соседних отсчетов в одном или более опорных изображениях.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этапы, на которых сохраняют флаг комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) и/или флаг режима внутрикадрового прогнозирования режима CIIP с информацией о движении в таблице прогнозирования вектора движения на основе предыстории (history-based motion vector prediction (HMVP)); и выполняют, по меньшей мере на основе таблицы прогнозирования HMVP, преобразование между текущим блоком данных видео и представлением текущего блока в виде потока битов данных.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этапы, на которых определяют, в процессе преобразования между текущим блоком данных видео и представлением текущего блока в виде потока битов данных, режим прогнозирования для текущего блока; определяют применимость комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), указывающую, что комбинированный режим прогнозирования CIIP активизирован для текущего блока, в ответ на определение, что текущий блок кодирован с применением режима усовершенствованного прогнозирования вектора движения (advanced motion vector prediction (AMVP)) или в режиме объединения; и выполняют преобразование на основе применимости режима прогнозирования CIIP.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этапы, на которых определяют, в процессе преобразования между текущим блоком данных видео и представлением текущего блока в виде потока битов данных, тип выбранного объединяемого кандидата для текущего блока, и определяют применимость комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего блока в соответствии с типом выбранного объединяемого кандидата, причем текущий блок кодирован в режиме объединения.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этапы, на которых кодируют, в процессе преобразования между текущим видеоблоком данных видео и представлением текущего видеоблока в виде потока битов данных, флаг комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего видеоблока посредством кодирования на основе контекстной модели без ссылки на флаг режима прогнозирования для одного или более видеоблоков, соседних с этим текущим блоком, и выполняют преобразование по меньшей мере путем применения флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего видеоблока.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этапы, на которых кодируют, в процессе преобразования между текущим видеоблоком данных видео и представлением текущего видеоблока в виде потока битов данных, флаг комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего видеоблока посредством обходного кодирования, и выполняют преобразование по меньшей мере путем применения комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP).
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этапы, на которых определяют режим внутрикадрового прогнозирования для первого видеоблока видео в соответствии с некоторым правилом, причем правило содержит: пропуск, в ходе процедуры определения режима внутрикадрового прогнозирования для первого видеоблока, проверки флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для одного или более видеоблоков, соседних с первым видеоблоком, и выполняют, на основе по меньшей мере найденного режима внутрикадрового прогнозирования, преобразование между первым видеоблоком и представлением первого видеоблока в виде потока битов данных.
Согласно другому примерному аспекту предложен другой способ обработки видео. Способ содержит этапы, на которых определяют, в процессе преобразования между текущим видеоблоком, кодированным в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), видео и представлением этого текущего видеоблока в виде потока битов данных, пару весовых коэффициентов, содержащую первый весовой коэффициент для первого результата прогнозирования текущего видеоблока и второй весовой коэффициент для второго результата прогнозирования текущего видеоблока, на основе одного или более видеоблоков, соседних с текущим видеоблоком, причем первый результат прогнозирования генерируется в режиме внутрикадрового прогнозирования, а второй результат прогнозирования генерируется в режиме межкадрового прогнозирования; и определяют результат прогнозирования текущего блока на основе взвешенной суммы первого результата прогнозирования и второго результата прогнозирования.
Согласно другому примерному аспекту, описанный выше способ может быть реализован кодирующим устройством для видео, которое содержит процессор.
Согласно еще одному примерному аспекту эти способы могут быть реализованы в виде исполняемых процессором команд, хранящихся на читаемом компьютером носителе программы.
Эти и другие аспекты будут далее описаны в настоящем документе.
Краткое описание чертежей
Фиг. 1 показывает пример процедуры построения списка объединяемых кандидатов.
Фиг. 2 показывает пример позиций пространственных кандидатов.
Фиг. 3 показывает пример пар кандидатов, подвергаемых контролю избыточности, из совокупности пространственных объединяемых кандидатов.
Фиг. 4 показывает пример позиций для второй единицы PU с разбиением N×2N и 2N×N.
Фиг. 5 показывает пример масштабирования векторов движения для временных объединяемых кандидатов.
Фиг. 6 показывает пример позиций кандидатов для временных объединяемых кандидатов, C0 и C1.
Фиг. 7 показывает пример комбинированного двунаправлено интерполированного (прогнозируемого) объединяемого кандидата.
Фиг. 8 показывает пример процедуры построения кандидатов с прогнозированием вектора движения.
Фиг. 9 показывает пример масштабирования векторов движения для пространственных объединяемых кандидатов.
Фиг. 10 показывает пример прогнозирования движения с использованием алгоритма прогнозирования альтернативного временного вектора движения (alternative temporal motion vector prediction (ATMVP)) для единиц кодирования (coding unit (CU)).
Фиг. 11 показывает пример соседних отсчетов для определения параметров компенсации освещенности (IC).
Фиг. 12 показывает пример процедуры поиска выражения окончательного вектора движения (ultimate motion vector expression (UMVE)).
Фиг. 13 показывает пример точки поиска выражения UMVE.
Фиг. 14 показывает пример логической схемы процедуры декодирования с применением предлагаемого способа прогнозирования вектора движения на основе предыстории (HMVP).
Фиг. 15 показывает пример обновления таблицы в предлагаемом способе прогнозирование HMVP.
Фиг. 16 показывает пример симметричного режима.
Фиг. 17 показывает пример соседних отсчетов для текущего блока и соответствующих им отсчетов в опорном изображении.
Фиг. 18 представляет блок-схему примера устройства для обработки видео.
Фиг. 19 показывает блок-схему примера реализации кодирующего устройства для видео.
Фиг. 20 представляет логическую схему примера способа обработки видео.
Фиг. 21 представляет логическую схему примера способа обработки видео.
Фиг. 22 показывает пример соседних блоков сверху и слева, используемых при оценке весовых коэффициентов для режима прогнозирования CIIP.
Фиг. 23 представляет логическую схему примера способа обработки видео.
Фиг. 24 представляет логическую схему примера способа обработки видео.
Фиг. 25 представляет логическую схему примера способа обработки видео.
Фиг. 26 представляет логическую схему примера способа обработки видео.
Фиг. 27 представляет логическую схему примера способа обработки видео.
Фиг. 28 представляет логическую схему примера способа обработки видео.
Фиг. 29 представляет логическую схему примера способа обработки видео.
Фиг. 30 представляет логическую схему примера способа обработки видео.
Фиг. 31 представляет логическую схему примера способа обработки видео.
Осуществление изобретения
Настоящий документ предлагает различные способы, которые могут быть использованы декодирующим устройством для потоков битов данных изображения или видео с целью улучшения качества цифрового изображения или видео после декомпрессии или декодирования. Для краткости термин «видео» используется здесь таким образом, что он охватывает как последовательность изображений (традиционно называемую видео), так и индивидуальные изображения. Кроме того, кодирующее устройство для видео также осуществляет эти способы в ходе процедуры кодирования с целью реконструкции декодированных кадров, используемых для дальнейшего кодирования.
Заголовки разделов используются в настоящем документе для облегчения понимания и не ограничивают варианты и способы только соответствующими разделами. В такой ситуации варианты из одного раздела можно комбинировать с вариантами из других разделов.
1. Общие положения
Настоящий документ относится к технологиям кодирования видео. В частности, он относится к комбинированному режиму кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), применяемому при кодировании или декодированию видео. Это может быть применено к существующим стандартам кодирования видео, таким как стандарт HEVC или стандарт универсального видео кодирования (Versatile Video Coding (VVC)), который еще должен быть завершен и выпущен. Это может быть также применимо к стандартам будущего для обработки видео или к видео кодекам.
2. Уровень техники
Стандарты кодирования видео развивались главным образом через разработку хорошо известных стандартов ITU-T и ISO/IEC. Союз ITU-T выпустил стандарты H.261 и H.263, организация ISO/IEC выпустила стандарты MPEG-1 и MPEG-4 Visual, а также эти две организации совместно выпустили стандарты H.262/MPEG-2 Video и H.264/MPEG-4 Advanced Video Coding (AVC) (усовершенствованное видео кодирование) и H.265/HEVC [1]. Со времени стандарта H.262, стандарты кодирования видео основаны на гибридной структуре кодирования видео, использующей временное прогнозирование плюс трансформационное кодирование. Для исследований в области технологий кодирования видео будущего, которые будут разработаны после технологии кодирования HEVC, группа экспертов по кодированию видео (VCEG) и группа экспертов по кинематографии (MPEG) в 2015 г. совместно основали Объединенную группу исследований в области видео (Joint Video Exploration Team (JVET)). С тех пор группа JVET разработала множество способов и ввела их в эталонное программное обеспечение, называемое Совместной исследовательской моделью (Joint Exploration Model (JEM)). В апреле 2018 г. группа VCEG (Q6/16) и отдел ISO/IEC JTC1 SC29/WG11 (MPEG) создали объединенную группу экспертов в области видео (Joint Video Expert Team (JVET)) для работ над стандартом VVC, имея целью добиться снижения требуемой скорости передачи битов данных на 50% по сравнению с кодированием HEVC.
На фиг. 19 представлена блок-схема примера реализации кодирующего устройства для видео. На фиг. 19 показано, что реализация кодирующего устройства имеет встроенную цепь обратной связи, в которое кодирующее устройство для видео также осуществляет функции декодирования видео (реконструкцию сжатого представления данных видео для использования при кодировании следующих данных видео).
2.1 Межкадровое прогнозирование в стандарте HEVC/H.265
Каждая единица межкадрового прогнозирования PU (prediction unit (единица прогнозирования)) имеет параметры движения для одного или двух списков опорных изображений. Совокупность параметров движения содержит вектор движения и индекс опорного изображения. Об использовании одного или двух списков опорных изображений может быть также передано в виде сигнализации с применением параметра inter_pred_idc. Векторы движения могут быть в явной форме закодированы в виде приращений относительно предикторов.
Когда единица CU кодирована в режиме пропуска, с этой единицей CU ассоциирована одна единица PU, и при этом нет ни значительных коэффициентов остатка, ни кодированного приращения вектора движения или индекса опорного изображения. Режим объединения специфицирован таким образом, что параметры движения для текущей единицы PU получают из соседних единиц PU, включая пространственные и временные кандидаты. Режим объединения может быть применен к любой единице PU межкадрового прогнозирования, не только в режиме пропуска. Альтернативой для режима объединения является передача параметров движения в явном виде, где векторы движения (более точно, разницы векторов движения относительно предиктора вектора движения), соответствующий индекс опорного изображения для каждого списка опорных изображений и показатель использования списка опорных изображений передают в виде сигнализации в явной форме для каждой единицы PU. Этот тип режима называется в настоящем документе усовершенствованным прогнозированием вектора движения (AMVP).
Когда сигнализация указывает, что следует использовать один из двух списков опорных изображений, единицу PU создают из одного блока отсчетов. Это называется «однонаправленным прогнозированием» (‘uni-prediction’). Однонаправленное прогнозирование доступно для срезов обоих видов – P-среза (P-slice) или среза со ссылкой на предыдущий срез (предсказанного среза) и B-среза (B-slice) или среза со ссылками на предыдущий и последующий срезы (или двунаправлено интерполированного среза).
Когда сигнализация указывает, что следует использовать оба списка опорных изображений, единицу PU создают из двух блоков отсчетов. Это называется «двунаправленной интерполяцией (прогнозированием)» (‘bi-prediction’). Двунаправленная интерполяция доступна только для B-срезов.
Следующий текст содержит подробности режимов межкадрового прогнозирования, специфицированных в стандарте кодирования HEVC. Это описание начнется с режима объединения.
2.1.1 Режим объединения
2.1.1.1 Определение кандидатов для режима объединения
Когда единицу PU прогнозируют с использованием режима объединения, индекс, указывающий на входную позицию в список объединяемых кандидатов, выделяют путем синтаксического анализа из потока битов данных и используют для извлечения информации о движении. Процедура построения указанного списка специфицирована в стандарте HEVC и может быть суммирована в соответствии со следующей последовательностью этапов:
Этап 1: Получение первоначальных кандидатов
Этап 1.1: Получение пространственных кандидатов
Этап 1.2: Контроль избыточности для пространственных кандидатов
Этап 1.3: Получение временных кандидатов
Этап 2: Вставка дополнительных кандидатов
Этап 2.1: Создание двунаправлено интерполированных кандидатов
Этап 2.2: Вставка кандидатов с нулевым движением
Эти этапы схематично показаны на фиг. 1. Для получения пространственных объединяемых кандидатов, выбирают максимум четыре объединяемых кандидата из совокупности кандидатов, расположенных в пяти различных положениях. Для получения временных объединяемых кандидатов выбирают максимум одного объединяемого кандидата из двух кандидатов. Поскольку в декодирующем устройстве предполагается постоянное число кандидатов для каждой единицы PU, если число кандидатов, полученных на этапе 1, не достигает максимального числа объединяемых кандидатов (MaxNumMergeCand), передаваемого в форме сигнализации в заголовке среза, генерируют дополнительных кандидатов. Поскольку число кандидатов является постоянным, индекс наилучшего объединяемого кандидата кодируют с использованием усеченной унарной бинаризации (truncated unary binarization (TU)). Если размер единицы CU равен 8, все единицы PU из текущей единицы CU совместно используют один список объединяемых кандидатов, который идентичен списку объединяемых кандидатов для единицы прогнозирования размером 2N×2N.
В последующем, операции, ассоциированные с перечисленными этапами, рассмотрены подробнее.
2.1.1.2 Получение пространственных кандидатов
При получении пространственных объединяемых кандидатов выбирают максимум четырех объединяемых кандидатов из совокупности кандидатов, расположенных в позициях, показанных на фиг. 2. Кандидатов выбирают в следующем порядке A1, B1, B0, A0 и B2. Позицию B2 учитывают только тогда, когда какая-либо из единиц PU, которые должны быть в позициях A1, B1, B0, A0, недоступна (например, потому, что эта единица принадлежит другому срезу или плитке) или кодирована с применением внутрикадрового прогнозирования. После добавления кандидата в позиции A1 добавление остальных кандидатов должно происходить с контролем избыточности, что обеспечивает исключение кандидатов с одинаковой информацией о движении из списка, так что эффективность кодирования улучшается. Для уменьшения вычислительной сложности не все возможные пары кандидатов рассматривают в процессе упомянутого контроля избыточности. Напротив, учитывают только пары, связанные стрелкой на фиг. 3, и какого-либо кандидата добавляют в список только в том случае, если соответствующий кандидат, использованный для контроля избыточности, не имеет такую же самую информацию о движении. Другим источником дублированной информации о движении является “вторая единица PU”, ассоциированная с разбиениями, отличными от 2Nx2N. В качестве примера, Фиг. 4 показывает вторую единицу PU для случаев N×2N и 2N×N, соответственно. Когда текущую единицу PU разбивают как N×2N, кандидат в позиции A1 не учитывается при построении списка. На деле, добавление этого кандидата может привести к тому, что две единицы прогнозирования будут иметь одинаковую информацию о движении, что является избыточным с точки зрения требования иметь только одну единицу PU в единице кодирования. Аналогично, позицию B1 не учитывают, когда текущую единицу PU разбивают как 2N×N.
2.1.1.3 Получение временных кандидатов
На этом этапе, в список добавляют только одного кандидата. В частности, при получении этого временного объединяемого кандидата, формируют масштабированный вектор движения на основе расположенной в этом же месте единицы PU, принадлежащей изображению, имеющему наименьшую разницу порядковых номеров картинки (Picture Order Count (POC)) относительно текущего изображения в рассматриваемом списке опорных изображений. О списке опорных изображений, который должен быть использован для получения расположенной в том же месте единицы PU, сигнализируют в явной форме в заголовке. Штриховая. линия на фиг. 5 иллюстрирует получение масштабированного вектора движения для временного объединяемого кандидата, который масштабируют из вектора движения для расположенной в том же месте единицы PU с использованием расстояний по порядковым номерам (POC-расстояний), tb и td, где расстояние tb определяют как разницу номеров POC между опорным изображением для текущего изображения и самим текущим изображением и расстояние td определяют как разницу номеров POC между опорным изображением для расположенного в том же месте изображения и самим расположенным в том же месте изображением. Индекс опорного изображения для временного объединяемого кандидата устанавливают равным нулю. Практическая реализация процедуры масштабирования описана в стандарте HEVC. Для B-среза получают два вектора движения, один для списка 0 опорных изображений и другой для списка 1 опорных изображений, и комбинируют эти векторы для получения двунаправлено интерполированного объединяемого кандидата.
В расположенной в том же месте единице PU (Y), принадлежащей опорному кадру, позицию для временного кандидата выбирают между кандидатами C0 и C1, как показано на фиг. 6. Если единица PU в позиции C0 недоступна, кодирована с применением внутрикадрового прогнозирования или находится вне текущей единицы CTU, используют позицию C1. В противном случае, для получения временного объединяемого кандидата используют позицию C0.
2.1.1.4 Вставка дополнительных кандидатов
Помимо пространственно-временных объединяемых кандидатов имеются еще два дополнительных типа объединяемых кандидатов: комбинированный двунаправлено интерполированный объединяемый кандидат и нулевой объединяемый кандидат. Комбинированных двунаправлено интерполированных объединяемых кандидатов генерируют с использованием пространственных и временных объединяемых кандидатов. Комбинированный двунаправлено интерполированный объединяемый кандидат используется только для B-среза. Таких комбинированных двунаправлено интерполированных кандидатов генерируют путем комбинирования параметров движения из первого списка опорных изображений для первоначального кандидата с параметрами движения из второго списка опорных изображений для другого кандидата. Если эти две группы параметров формируют разные гипотезы движения, они создадут нового двунаправлено интерполированного кандидата. В качестве примера, на фиг. 7 показан случай, где двух кандидатов из исходного списка (слева), имеющих параметры mvL0 и refIdxL0 или mvL1 и refIdxL1, используют для создания комбинированного двунаправлено интерполированного объединяемого кандидата, добавляемого в конечный список (справа). Имеются многочисленные правила относительно построения таких комбинаций, учитываемые при генерации таких дополнительных объединяемых кандидатов.
Кандидатов с нулевым движением вставляют для заполнения оставшихся входных позиций в списке объединяемых кандидатов и тем самым достижения максимальной емкости MaxNumMergeCand списка. Эти кандидаты имеют нулевое пространственное смещение, а индекс опорного изображения начинается с нуля и увеличивается каждый раз, когда в список добавляют нового кандидата с нулевым движением. Число опорных кадров, используемых этими кандидатами, равно одному и двум для однонаправленного прогнозирования и двунаправленного прогнозирования, соответственно. В некоторых вариантах, для этих кандидатов контроль избыточности не осуществляется.
2.1.1.5 Области оценки движения для параллельной обработки
Для ускорения процедуры кодирования оценка движения может быть выполнена параллельно, так что векторы движения для всех единиц прогнозирования в пределах какой-либо конкретной рассматриваемой области получают одновременно. Процедура получения объединяемых кандидатов из пространственного окружения может создавать взаимные помехи с параллельной обработкой, поскольку одна единица прогнозирования не может вывести параметры движения из соседней единицы PU до тех пор, пока ассоциированная с той единицей оценка движения не будет завершена. Для сглаживания компромиссов между эффективностью кодирования и задержкой обработки данных стандарт кодирования HEVC определяет область оценки движения (motion estimation region (MER)), о размерах которой сообщают в форме сигнализации в наборе параметров изображения с использованием синтаксического элемента “log2_parallel_merge_level_minus2”. Когда область MER определена, объединяемые кандидаты, попадающие в ту же самую область, маркируются как недоступные и поэтому не учитываемые при построении списка.
2.1.2 Усовершенствованное прогнозирование вектора движения (AMVP)
Прогнозирование AMVP использует пространственно-временную корреляцию вектора движения с соседними единицами PU, что используется для передачи параметров движения в явной форме. Для каждого списка опорных изображений, при построении списка векторов-кандидатов движения сначала проверяют доступность временных соседних единиц PU в позициях слева сверху, исключают избыточных кандидатов и добавляют нулевой вектор, чтобы сделать список кандидатов постоянной длины. Тогда кодирующее устройство может выбрать наилучшего предиктора из списка кандидатов и передать соответствующий индекс, указывающий выбранного кандидата. Аналогично передаче индекса объединения посредством сигнализации, индекс наилучшего вектора движения кодируют с использованием усеченной унарной бинаризации. Максимальное значение, подлежащее кодированию, в этом случае равно 2 (см. фиг. 8). В последующих разделах приведены подробности процедуры получения кандидата при прогнозировании вектора движения.
2.1.2.1 Получение кандидатов при прогнозировании AMVP
Фиг. 8 суммирует процедуру получения кандидата при прогнозировании вектора движения.
При прогнозировании векторов движения рассматривают два типа векторов-кандидатов движения: пространственный вектор-кандидат движения и временной вектор-кандидат движения. Для формирования пространственного вектора-кандидата движения в конечном итоге получают два вектора-кандидата движения на основе векторов движения для каждой из единиц PU, расположенных в пяти разных позициях, как было ранее показано на фиг. 2.
Для формирования временного вектора-кандидата движения выбирают одного вектора-кандидата движения из двух кандидатов, получаемых на основе двух разных расположенных в одном месте позиций. После создания первого списка пространственно-временных кандидатов из этого списка исключают дублированные векторы-кандидаты движения. Если число потенциальных кандидатов больше двух, векторы-кандидаты движения, для которых индекс опорного изображения в ассоциированном списке опорных изображений больше 1, исключают из этого списка. Если это число пространственно-временных векторов движения кандидатов меньше двух, в список добавляют дополнительный нулевой вектор-кандидат движения.
2.1.2.2 Пространственные векторы-кандидаты движения
Для формирования пространственного вектора-кандидата движения, учитывают максимум двух потенциальных кандидатов из совокупности пяти потенциальных кандидатов, получаемых из единиц PU, расположенных в позициях, как это показано на фиг. 2, эти позиции являются такими же, как при объединении движения. Порядок формирования для левой стороны от текущей единицы PU задан как кандидат A0, кандидат A1, и масштабированный кандидат A0, масштабированный кандидат A1. Порядок формирования для верхней стороны от текущей единицы PU задан как кандидат B0, кандидат B1, кандидат B2, масштабированный кандидат B0, масштабированный кандидат B1, масштабированный кандидат B2. Для каждой стороны, поэтому, имеются четыре случая, которые могут быть использованы в качестве вектора-кандидата движения, где в двух случаях не требуется использовать пространственное масштабирование, и в двух случаях пространственное масштабирование применяется. Эти четыре разных случая суммированы следующим образом.
Нет пространственного масштабирования
(1) Один и тот же список опорных изображений и одинаковый индекс опорного изображения (одинаковый порядок POC)
(2) Разные списки опорных изображений, но одно и то же опорное изображение (одинаковый порядок POC)
Пространственное масштабирование
(3) Один и тот же список опорных изображений, но разные опорные изображения (разный порядок POC)
(4) Разные списки опорных изображений и разные опорные изображения (разный порядок POC)
Случаи без пространственного масштабирования проверяют первыми, после чего проверяют случаи, позволяющие пространственное масштабирование. Пространственное масштабирование рассматривается, когда порядок POC различается между опорным изображением для соседней единицы PU и опорным изображением для текущей единицы PU независимо от списка опорных изображений. Если все единицы PU кандидатов слева недоступны или кодированы с применением внутрикадрового прогнозирования, допускается масштабирование вектора движения для единицы сверху, чтобы способствовать параллельному определению векторов-кандидатов MV слева и сверху. В противном случае для вектора движения единицы сверху пространственное масштабирование не допускается.
Для случая пространственного масштабирования, вектор движения для соседней единицы PU масштабируют способом, аналогичным временному масштабированию, как показано в примере, приведенном на фиг. 9. Основное различие состоит в том, что в качестве входных данных используют список опорных изображений и индекс текущей единицы PU; фактическая процедура масштабирования является такой же, как в случае временного масштабирования.
2.1.2.3 Временные векторы-кандидаты движения
Помимо получения индекса опорного изображения, все процедуры для формирования временных объединяемых кандидатов являются такими же, как и для формирования пространственных векторов-кандидатов движения (как показано в примере на фиг. 6). Индекс опорного изображения сообщают посредством сигнализации декодирующему устройству.
2.2 Новые способы межкадрового прогнозирования
2.2.1 Прогнозирование векторов движения на основе суб-единиц CU
В модели JEM с использованием деревьев квадратов плюс двоичные деревья (quadtrees plus binary trees (QTBT)), каждая единица CU может иметь самое большее один набор параметров движения на каждое направление прогнозирования. Рассматриваются два способа прогнозирования векторов движения на уровне суб-единиц CU в кодирующем устройстве путем разделения большой единицы CU на суб-единицы CU и формирования информации движения для всех суб-единиц CU из большой единицы CU. Способ прогнозирования альтернативного временного вектора движения (ATMVP) позволяет каждой единице CU осуществлять выборку нескольких наборов информации движения из нескольких блоков меньше текущей единицы CU в расположенном в том же месте опорном изображении. При использовании способа прогнозирования пространственно-временного вектора движения (spatial-temporal motion vector prediction (STMVP)) векторы движения суб-единиц CU формируют с применением предиктора временного вектора движения и пространственного соседнего вектора движения.
С целью сохранения более точного поля движения для прогнозирования движения суб-единицы CU сжатие движения для опорных кадров может быть в текущий момент не активизировано.
2.2.1.1 Прогнозирование альтернативного временного вектора движения
Согласно способу прогнозирования альтернативного временного вектора движения (ATMVP), способ прогнозирования временного вектора движения (TMVP) модифицируют путем выборки нескольких наборов информации о движении (включая векторы движения и опорные индексы) из блоков меньше текущей единицы CU. Как показано на фиг. 10, суб-единицы CU представляют собой квадратные блоки размером N×N (по умолчанию N устанавливают равным 4).
Способ прогнозирования ATMVP осуществляет прогнозирование векторов движения суб-единиц CU в пределах единицы CU в два этапа. На первом этапе идентифицируют соответствующий блок в опорном изображении с так называемым временным вектором. Опорное изображение также называется изображением источника движения. На втором этапе разбивают текущую единицу CU на суб-единицы CU и получают векторы движения, равно как опорные индексы каждой суб-единицы CU, из блока, соответствующего каждой суб-единице CU, как показано на фиг. 10.
На первом этапе, опорное изображение 1050 и соответствующий блок определяют посредством информации о движении пространственно соседних блоков для текущей единицы CU. Чтобы избежать повторяющихся процедур сканирования соседних блоков, используют первого объединяемого кандидата из списка объединяемых кандидатов для текущей единицы. CU. Первый доступный вектор движения, равно как и ассоциированный с ним опорный индекс устанавливают в качестве временного вектора и индекса для изображения источника движения. Таким способом, в режиме прогнозирования ATMVP, соответствующий блок может быть более точно идентифицирован, по сравнению со способом прогнозирования TMVP, где соответствующий блок (иногда называемый расположенным в том же месте блоком) всегда находится в нижней правой или в центральной позиции относительно текущей единицы CU.
На втором этапе, соответствующий блок суб-единицы CU идентифицируют посредством временного вектора в изображении источника движения путем добавления временного вектора к координате текущей единице CU. Для каждой суб-единицы CU, информацию о движении ее соответствующего блока (наименьшую сетку движения, покрывающую центральный отсчет) используют для получения информации о движении для рассматриваемой суб-единицы CU. После идентификации информации о движении соответствующего блока размером N×N ее преобразуют в векторы движения и опорные индексы текущей суб-единицы CU, таким же образом как в способе прогнозирования TMVP в стандарте кодирования HEVC, где применяются масштабирование движения и другие процедуры. Например, декодирующее устройство проверяет, удовлетворяется ли условие малой задержки, (например, порядковые номера POC для всех опорных изображений для текущего изображения меньше порядкового номера POC для текущего изображения) и возможно использует вектор MVx движения (вектор движения, соответствующий списку опорных изображений X) для прогнозирования вектора MVy движения (при X равном 0 или 1 и Y равном 1−X) для каждой суб-единицы CU.
2.2.2 Попарно усредненные кандидаты
Попарно усредненных кандидатов генерируют путем усреднения заданных пар кандидатов в текущем списке объединяемых кандидатов, и эти заданные пары определяют как {(0, 1), (0, 2), (1, 2), (0, 3), (1, 3), (2, 3)}, где цифры обозначают индексы объединения к списку объединяемых кандидатов. Усредненные векторы движения вычисляют по отдельности для каждого опорного списка. Если оба вектора движения доступны в одном списке, эти два вектора движения усредняют, даже если они указывают на разные опорные изображения; если доступен один вектор движения, этот один вектор используют непосредственно; если ни один вектор движения не доступен, этот список оставляют недействительным. Попарно усредненные кандидаты заменяют комбинированных кандидатов в стандарте кодирования HEVC.
Анализ сложности попарно усредненных кандидатов суммирован в таблице 1. Для худшего случая дополнительных вычислений для усреднения (последний столбец в таблице 1), для каждой пары необходимы 4 операции суммирования и 4 операции сдвига (векторы MVx и MVy в списках L0 а L1), а также для каждой пары необходимы 4 операции сравнения опорных индексов (индекс refIdx0 действителен и индекс refIdx1 действителен в списках L0 и L1). Здесь имеются 6 пар, что приводит к 24 операциям суммирования, 24 операциям сдвига и 24 операциям сравнения опорных индексов всего. Комбинированные кандидаты в стандарте кодирования HEVC используют по 2 операции сравнения опорных индексов для каждой пары (индекс refIdx0 действителен в списке L0 и индекс refIdx1 действителен в списке L1), и при этом имеются 12 пар, что приводит к 24 операциям сравнения опорных индексов всего
Таблица 1. Анализ операций для попарно усредненных кандидатов
2.2.3 Локальная компенсация освещенности
Локальная компенсация освещенности (Local Illumination Compensation (LIC)) основана на линейной модели изменений освещенности, использующей масштабный коэффициент a и сдвиг b. Причем эту компенсацию активизируют или отменяют активизацию адаптивно для единицы кодирования (CU), кодированной с применением межкадрового прогнозирования.
Когда компенсация LIC применяется для единицы CU, применяют метод наименьших квадратов для получения параметров a и b с использованием соседних отсчетов относительно текущей единицы CU и соответствующих им опорных отсчетов. Более конкретно, как иллюстрирует фиг. 11, используются субдискретизированные (субдискретизация в соотношении 2:1) соседние отсчеты относительно единицы CU и соответствующие отсчеты (идентифицированные информацией о движении текущей единицы CU или суб-единицы CU) из опорного изображения. Параметры компенсации IC получают и применяют для каждого направления прогнозирования по отдельности.
Когда единицу CU кодируют с применением режима объединения, копируют флаг компенсации LIC из соседних блоков способом, аналогичным копированию информации о движении в режиме объединения; в противном случае флаг компенсации LIC передают в виде сигнализации для единицы CU, чтобы указать, применяется компенсация LIC или нет.
Когда для некоторого изображения активизирована компенсация LIC, необходимо осуществить дополнительную проверку избыточности (RD) на уровне единиц CU, чтобы определить, применяется ли компенсация LIC для какой-либо единицы CU. Если для какой-то единицы CU активизирована компенсация LIC, используют сумму абсолютных разностей с исключением среднего (mean-removed sum of absolute difference (MR-SAD)) и трансформированную по преобразованию Адамара сумму абсолютных разностей с исключением среднего (mean-removed sum of absolute Hadamard-transformed difference (MR-SATD)) вместо суммы SAD и суммы SATD, для поиска целочисленного движения элементов изображения и поиска дробного движения элементов изображения, соответственно.
Для уменьшения сложности кодирования, в модели JEM применяется следующая схема кодирования.
Компенсацию LIC не активизируют для всего изображения, когда. нет заметных изменений освещенности между текущим изображением и соответствующими ему опорными изображениями. Для идентификации этой ситуации, в кодирующем устройстве вычисляют гистограммы для текущего изображения и для каждого опорного изображения, соответствующего этому текущему изображения. Если разница гистограмм между текущим изображением и каждым из опорных изображений для этого текущего изображения меньше конкретного порогового значения, компенсацию LIC для текущего изображения не активизируют; в противном случае активизируют эту компенсацию LIC для текущего изображения.
2.2.4 Комбинированный режим кодирования с внутрикадровым и межкадровым прогнозированием
В некоторых вариантах предлагается прогнозирование с использованием нескольких гипотез, при этом комбинированный режим кодирования с внутрикадровым и межкадровым прогнозированием является одним из способов для генерации нескольких гипотез.
Когда прогнозирование с использованием нескольких гипотез применяется для усовершенствования режима внутрикадрового прогнозирования, такое прогнозирование с использованием нескольких гипотез комбинирует одно внутрикадровое прогнозирование и одно объединенное индексированное прогнозирование. В объединяемой единице CU, один флаг передают в виде сигнализации для режима объединения, чтобы выбрать режим внутрикадрового прогнозирования из списка режимов-кандидатов внутрикадрового прогнозирования, когда флаг является истинным. Для яркостной составляющей список режимов-кандидатов выбирают из 4 режимов внутрикадрового прогнозирования, включая DC-режим, планарный режим, горизонтальный режим и вертикальный режим, а размер этого списка режимов-кандидатов внутрикадрового прогнозирования может быть равен 3 или 6 в зависимости от формы блока. Когда ширина единицы CU больше удвоенной высоты этой единицы CU, горизонтальный режим должен быть исключен из списка режимов внутрикадрового прогнозирования, а когда высота единицы CU больше удвоенной ширины этой единицы CU, вертикальный режим исключают из списка режимов внутрикадрового прогнозирования. Один режим внутрикадрового прогнозирования, выбранный по индексу режима внутрикадрового прогнозирования, и одно объединенное индексированное прогнозирование, выбранное по индексу объединения, комбинируют с использованием взвешенного усреднения. Для цветностной составляющей всегда применяется DM-режим без дополнительной сигнализации. Весовые коэффициенты для комбинирования результатов прогнозирования определяют следующим образом. Когда выбран DC-режим или планарный режим, либо ширина или высота блока кодирования (CB) меньше 4, применяют равные весовые коэффициенты. Для тех блоков CB, для которых ширина и высота блока CB не меньше 4, когда выбран горизонтальный/вертикальный режим, один блок CB сначала вертикально/горизонтально разбивают на четыре области одинаковой площади. Каждая группа весовых коэффициентов, обозначенная как (w_intrai, w_interi), где i принимает значения от 1 до 4 и (w_intra1, w_inter1) = (6, 2), (w_intra2, w_inter2) = (5, 3), (w_intra3, w_inter3) = (3, 5), и (w_intra4, w_inter4) = (2, 6), будет применена к соответствующей области. Здесь группа (w_intra1, w_inter1) предназначена для области, ближайшей к опорным отсчетам, и группа (w_intra4, w_inter4) предназначена для области, наиболее удаленной от опорных отсчетов. Затем комбинированное прогнозирование может быть вычислено путем суммирования двух взвешенных прогнозирований и сдвига вправо на 3 бит. Более того, результат режима внутрикадрового прогнозирования для предикторов, относящийся к гипотезе о внутрикадровом прогнозировании, может быть сохранен в качестве опоры для следующих соседних единиц CU.
Обобщенное двунаправленное прогнозирование (интерполяция)
При обычном двунаправленном прогнозировании предикторы для списков L0 и L1 усредняют для генерации конечного предиктора с использованием одинаковых весовых коэффициентов, равных 0.5. Формула генерации предиктора приведена как Уравнение (3) (Equ. (3))
PTraditionalBiPred = (PL0 + PL1 + RoundingOffset) >> shiftNum, … (1)
В Уравнении (3) (Equ. (3)), параметр PTraditionalBiPred представляет собой конечный предиктор для обычного двунаправленного прогнозирования, PL0 и PL1 обозначают предикторы из списков L0 и L1, соответственно, и параметры RoundingOffset и shiftNum используются для нормировки конечного предиктора.
Обобщенное двунаправленное прогнозирование (Generalized Bi-prediction (GBI)) предлагается для того, чтобы позволить применять разные весовые коэффициенты к предикторам из списков L0 и L1. Генерацию предикторов описывает Уравнение (4) (Equ. (4)).
PGBi = ( (1-w1)* PL0 + w1 * PL1 + RoundingOffsetGBi) >> shiftNumGBi, … (2)
В Уравнении (4) (Equ. (4)), параметр PGBi обозначает конечный предиктор прогнозирования GBi. Коэффициенты (1-w1) и w1 являются выбранными весовыми коэффициентами прогнозирования GBI, применяемыми к предикторам из списков L0 и L1, соответственно. Параметры RoundingOffsetGBi и shiftNumGBi используются для нормировки конечных предикторов в прогнозировании GBi.
Таблица поддерживаемых весовых коэффициентов w1 имеет вид {-1/4, 3/8, 1/2, 5/8, 5/4}. Здесь поддерживается одна группа одинаковых весовых коэффициентов и четыре группы неравных весовых коэффициентов. Для случая одинаковых весовых коэффициентов процедура генерации конечного предиктора является точно такой же, как в режиме обычного двунаправленного прогнозирования. Для случаев истинного двунаправленного прогнозирования в условиях произвольного доступа (random access (RA)) число групп весовых коэффициентов-кандидатов уменьшено до трех.
Для режима усовершенствованного прогнозирования вектора движения (AMVP) о выборе весовых коэффициентов прогнозирования GBI сообщают в форме сигнализации в явном виде на уровне единицы CU, если эту единицу CU кодируют с применением двунаправленной интерполяции. Для режима объединения, выбор весовых коэффициентов «наследуется» от объединяемого кандидата. Для этой цели режим прогнозирования GBI поддерживает режим уточнения вектора движения на стороне декодирующего устройства (DMVR) для генерации взвешенного среднего относительно шаблона, равно как конечного предиктора для BMS-1.0.
2.2.6 Предельное выражение вектора движения
В некоторых вариантах, представлено предельное выражение вектора движения (ultimate motion vector expression) (UMVE). Параметр UMVE используется вместе с режимом пропуска или режимом объединения с предлагаемым способом выражения вектора движения.
Параметр UMVE повторно использует объединяемого кандидата, как такого же, как используемый в стандарте кодирования VVC. Из совокупности объединяемых кандидатов может быть выбран один кандидат и далее расширен посредством предлагаемого способа выражения вектора движения.
Параметр UMVE предлагает новое выражение вектора движения с упрощенной сигнализацией. Этот способ выражения содержит начальную точку, величину движения и направление движения.
Этот предлагаемый способ использует список объединяемых кандидатов, как он есть. Но для расширения UMVE рассматриваются только кандидаты, имеющие тип объединения по умолчанию (MRG_TYPE_DEFAULT_N).
Индекс базового кандидата определяет начальную точку. Этот индекс базового кандидата обозначает наилучшего кандидата из совокупности кандидатов, входящих в список, следующим образом.
Таблица 1. Индекс (IDX) базового кандидата
Если число базовых кандидатов равно 1, сигнализацию об индексе IDX базового кандидата не передают.
Индекс расстояния представляет собой информацию о величине движения. Индекс расстояния обозначает предварительно заданное расстояние от информации о начальной точке. Это предварительно заданное расстояние определено следующим образом:
Таблица 2. Индекс (IDX) расстояния
Индекс направления представляет направление разности векторов движения (motion vector difference (MVD)) относительно начальной точки. Индекс направления может представлять четыре направления, как показано ниже.
Таблица 3. Индекс (IDX) направления
Флаг расширения UMVE передают в виде сигнализации сразу после передачи флага пропуска и флага объединения. Если флаг пропуска и объединения является истинным, выполняют синтаксический анализ флага UMVE. Если флаг UMVE равен 1, выполняют синтаксический анализ синтаксиса расширения UMVE. Но если этот флаг не равен 1, выполняют синтаксический анализ флага аффинности (AFFINE). Если флаг AFFINE равен 1, это означает аффинный (AFFINE) режим. Но если этот флаг не равен 1, выполняют синтаксический анализ индекса пропуска/объединения для режима пропуска/объединения из документа VTM.
Дополнительный буфер строк из-за появления кандидатов UMVE не требуется, поскольку кандидат пропуска/объединяемый кандидат из программного обеспечения непосредственно используется в качестве базового кандидата. Используя входной индекс UMVE, определяют дополнение вектора MV непосредственно перед компенсацией движения. Нет необходимости держать буфер длинной строки для этого.
2.2.7 Прогнозирование вектора движения на основе предыстории
В нашей предыдущей заявке на изобретение, P1805028401H, используются одна или несколько преобразовательных таблиц по меньшей мере с одним сохраненным кандидатом движения для прогнозирования информации о движении для блока.
Предложен способ прогнозирования вектора движения на основе предыстории (HMVP), в котором кандидат прогнозирования HMVP определен как информация о движении ранее кодированного блока. В процессе кодирования/декодирования поддерживают таблицу с несколькими кандидатами прогнозирования HMVP. Эту таблицу опустошают, когда отмечен новый срез. Всякий раз, когда встречается блок, кодируемый с применением межкадрового прогнозирования, ассоциированную с ним информацию о движении добавляют к последней входной позиции таблицы в качестве нового кандидата прогнозирования HMVP. Общий поток кодирования показан на фиг. 13.
В одном из примеров, размер таблицы установлен L (например, L = 16 или 6, или 44), что означает, что в таблицу могут быть внесены всего до L кандидатов прогнозирования HMVP.
В одном из вариантов, если имеется больше L кандидатов прогнозирования HMVP из ранее кодированных блоков, применяется правило «первым записан – первым вычеркнут» (First-In-First-Out (FIFO)), так что таблица всегда содержит L самых последних из ранее кодированных кандидатов движения. На фиг. 14 показан пример, в котором правило FIFO применяется для вычеркивания из таблицы, используемой в предлагаемом способе, одного кандидата прогнозирования HMVP и добавления нового кандидата в эту таблицу.
В другом варианте, при каждом добавлении нового кандидата движения (например, когда текущий блок кодируют в неаффинном режиме и с применением. межкадрового прогнозирования) сначала выполняют контроль избыточности, чтобы идентифицировать, имеются ли идентичные или аналогичные кандидаты движения в преобразовательных таблицах LUT.
2.2.8 Симметричная разность векторов движения
В некоторых вариантах, предложен подход с симметричной разностью векторов движения (symmetric motion vector difference (SMVD)) для более эффективного кодирования разности MVD.
Сначала, на уровне среза, определяют переменные BiDirPredFlag, RefIdxSymL0 и RefIdxSymL1 следующим образом:
Сначала в списке 0 опорных изображений осуществляют поиск опорного изображения прямого направления, ближайшего к текущему изображению. Если таковое найдено, переменную RefIdxSymL0 устанавливают равной опорному индексу этого изображения прямого направления.
В списке 1 опорных изображений осуществляют поиск опорного изображения обратного направления, ближайшего к текущему изображению. Если таковое найдено, переменную RefIdxSymL1 устанавливают равной опорному индексу этого изображения обратного направления.
Если найдены оба изображения – и прямого, и обратного направления, флаг BiDirPredFlag устанавливают равным 1.
В противном случае применяется следующее:
В списке 0 опорных изображений осуществляют поиск опорного изображения обратного направления, ближайшего к текущему изображению. Если таковое найдено, переменную RefIdxSymL0 устанавливают равной опорному индексу этого изображения обратного направления.
В списке 1 опорных изображений осуществляют поиск опорного изображения прямого направления, ближайшего к текущему изображению. Если таковое найдено, переменную RefIdxSymL1 устанавливают равной опорному индексу этого изображения прямого направления.
Если найдены оба изображения – и обратного, и прямого направления, флаг BiDirPredFlag устанавливают равным 1. В противном случае, флаг BiDirPredFlag устанавливают равным 0.
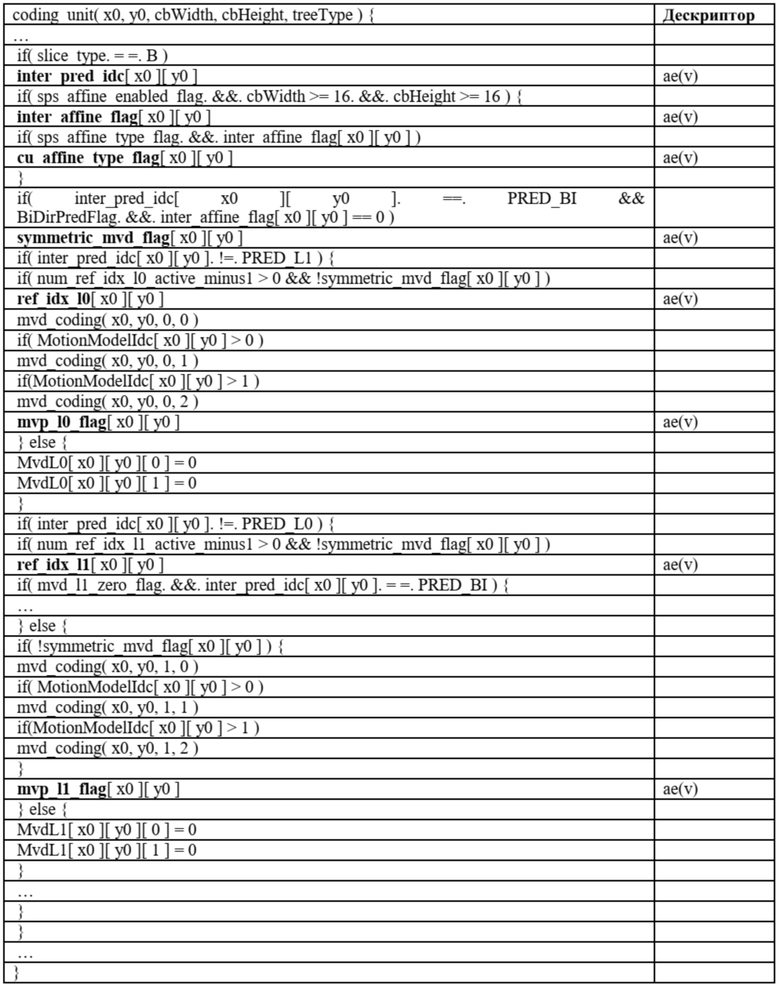
Во-вторых, на уровне единицы CU, передают в форме сигнализации в явном виде флаг симметричного режима, указывающий, применяется ли симметричный режим или нет, если направление прогнозирования для рассматриваемой единицы CU является «двунаправленным», и флаг BiDirPredFlag равен 1.
Когда этот флаг является истинным, передают в явном виде в форме сигнализации только флаг mvp_l0_flag, флаг mvp_l1_flag и разность MVD0. Опорные индексы устанавливают равными RefIdxSymL0, RefIdxSymL1 для списка 0 и списка 1, соответственно. Разность MVD1 просто устанавливают равной –MVD0. Окончательные векторы движения определены формулами ниже.

Модификации синтаксиса единицы кодирования показаны таблице 2.
Таблица 2. Модификации синтаксиса единицы кодирования
2.2. 9 Комбинированный режим прогнозирования CIIP в стандарте VTM4
В стандарте VTM4, когда единицу CU кодируют в режиме объединения, и если эта единица CU содержит по меньшей мере 64 отсчета яркостной составляющей (иными словами, произведение ширины единицы CU на высоту этой единицы CU не меньше 64), передают в форме сигнализации дополнительный флаг для индикации, применяется ли комбинированный режим межкадрового/внутрикадрового прогнозирования (CIIP) к текущей единице CU.
Для формирования прогнозирования в комбинированном режиме CIIP сначала определяют режим внутрикадрового прогнозирования на основе двух дополнительных синтаксических элементов. Могут быть использованы вплоть до четырех возможных режимов внутрикадрового прогнозирования: DC-режим, планарный режим, горизонтальный режим или вертикальный режим. Затем формируют сигналы межкадрового и внутрикадрового прогнозирования с использованием регулярных процедур внутрикадрового и межкадрового прогнозирования. Наконец, осуществляют взвешенное усреднение этих сигналов межкадрового и внутрикадрового прогнозирования для получения прогнозирования в комбинированном режиме CIIP.
1. Определение режима внутрикадрового прогнозирования
Вплоть до 4 режимов внутрикадрового прогнозирования, включая DC-режим, планарный (PLANAR) режим, горизонтальный (HORIZONTAL) режим и вертикальный (VERTICAL) режим, могут быть использованы для прогнозирования яркостной составляющей в комбинированном режиме прогнозирования CIIP. Если единица CU сильно вытянута в ширину (иными словами, ширина более чем вдвое превышает высоту), тогда горизонтальный режим не допускается. Если единица CU является очень узкой (иными словами, высота более чем вдвое превышает ширину), тогда вертикальный режим не допускается. В этих случаях допустимы только 3 режима внутрикадрового прогнозирования.
Режим комбинированного прогнозирования CIIP использует 3 наиболее вероятных режима (most probable modes (MPM)) для внутрикадрового прогнозирования. Список таких наиболее вероятных режимов-кандидатов для комбинированного прогнозирования (CIIP MPM) формируют следующим образом:
- Соседние блоки слева и сверху обозначают как A и B, соответственно
- Режимы внутрикадрового прогнозирования для блока A и блока B, обозначенные как. intraModeA и intraModeB, соответственно, определяют следующим образом:
○ Пусть X будет A или B
○ Параметр intraModeX устанавливают как DC, если 1) блок X недоступен; или 2) блок X не прогнозируют в комбинированном режиме CIIP и в режиме внутрикадрового прогнозирования; 3) блок B находится вне текущей единицы CTU
○ В противном случае, параметр intraModeX устанавливают как 1) DC или PLANAR, если режимом внутрикадрового прогнозирования для блока X является DC-режим или режим PLANAR; или 2) режим VERTICAL, если режим внутрикадрового прогнозирования для блока X представляет собой угловой режим «типа вертикального» (номер больше 34), или 3) режим HORIZONTAL, если режим внутрикадрового прогнозирования для блока X представляет собой угловой режим «типа горизонтального» (номер не больше 34)
- Если параметры. intraModeA и intraModeB являются одинаковыми:
○ Если параметр intraModeA установлен как PLANAR или DC, тогда тремя режимами MPM являются режимы {PLANAR, DC, VERTICAL} в этом порядке
○ В противном случае, этими тремя режимами MPM являются режимы {intraModeA, PLANAR, DC} в этом порядке
- В противном случае (параметры intraModeA и intraModeB являются разными):
○ Первые два режима MPM устанавливают как {intraModeA, intraModeB} в этом порядке
○ Уникальность режимов PLANAR, DC и VERTICAL проверяют в этом порядке, сравнивая с первыми двумя режимами-кандидатами MPM; как только будет найден уникальный режим, его добавляют в качестве третьего режима MPM
Если единица CU имеет очень широкую или очень узкую форму, как определено выше, флаг режима MPM считается равным 1 без передачи сигнализации. В противном случае передают в виде сигнализации флаг режима MPM для индикации, если режим внутрикадрового прогнозирования из комбинированного режима CIIP является одним из режимов кандидатов CIIP MPM.
Если флаг режима MPM равен 1, далее передают в виде сигнализации индекс режима MPM с целью индикации, какой именно из режимов-кандидатов MPM используется для внутрикадрового прогнозирования в комбинированном режиме CIIP. В противном случае, если флаг режима MPM равен 0, в качестве режима внутрикадрового прогнозирования устанавливают режим, «отсутствующий» в списке режимов-кандидатов MPM. Например, если режима PLANAR нет в списке режимов-кандидатов MPM, тогда режим PLANAR является отсутствующим режимом, и в качестве режима внутрикадрового прогнозирования устанавливают режим PLANAR. Поскольку в комбинированном режиме прогнозирования CIIP допускаются 4 возможных режима внутрикадрового прогнозирования, а список режимов-кандидатов MPM содержит только 3 режима внутрикадрового прогнозирования, одним из 4 возможных режимов должен быть указанный отсутствующий режим.
Для цветностных составляющих всегда применяется DM-режим без дополнительной сигнализации; иными словами, цветностная составляющая всегда использует такой же режим прогнозирования, как и яркостная составляющая.
Индикация режима внутрикадрового прогнозирования, примененного к единице CU, кодированной в комбинированном режиме CIIP, будет сохранена и этот режим будет использован для внутрикадрового кодирования будущих соседних единиц CU.
2.2.9.2 Комбинирование сигналов межкадрового и внутрикадрового прогнозирования
Сигнал Pinter межкадрового прогнозирования в комбинированном режиме CIIP получают с использованием той же самой процедуры межкадрового прогнозирования, какая применена к обычному, регулярному режиму объединения; и сигнал Pintra внутрикадрового прогнозирования определяют с использованием применяемого в комбинированном режиме CIIP режима внутрикадрового прогнозирования, следуя обычной, регулярной процедуре внутрикадрового прогнозирования. Затем сигналы внутрикадрового и межкадрового прогнозирования комбинируют посредством взвешенного усреднения, где значение весового коэффициента зависит от режима внутрикадрового прогнозирования, и где отсчет расположен в блоке кодирования, следующим образом:
- Если режим внутрикадрового прогнозирования представляет собой DC-режим или планарный режим, либо если ширина или высота блока меньше 4, тогда к сигналам внутрикадрового прогнозирования и межкадрового прогнозирования применяют одинаковые весовые коэффициенты.
- В противном случае, весовые коэффициенты определяют на основе режима внутрикадрового прогнозирования (либо горизонтального режима, либо вертикального режима в этом случае) и позиции отсчета в блоке. Возьмем в качестве примера горизонтальный режим прогнозирования (весовые коэффициенты для вертикального режима определяют аналогичным образом, но в ортогональном направлении). Обозначим W ширину блока и H высоту этого блока. Блок кодирования сначала разбивают на четыре части равной площади, каждая размером (W/4)xH. Начиная от части, ближайшей к опорным отсчетам для внутрикадрового прогнозирования, и заканчивая частью, наиболее удаленной от этих опорных отсчетов для внутрикадрового прогнозирования, весовой коэффициент wt для каждой из 4 областей устанавливают равным 6, 5, 3 и 2, соответственно. Окончательный сигнал прогнозирования в комбинированном режиме CIIP определяют с использованием следующего:

ii Комбинированный режим прогнозирования CIIP в стандарте VTM5
В стандарте VTM5, когда единицу CU кодируют в режиме объединения, если эта единица CU содержит по меньшей мере 64 отсчета яркостной составляющей (иными словами, произведение ширины единицы CU на высоту этой единицы CU не меньше 64), и если оба размера – и ширина единицы CU, и высота единицы CU, меньше 128 отсчетов яркостной составляющей, передают в виде сигнализации дополнительный флаг для индикации, что комбинированный режим межкадрового/внутрикадрового прогнозирования (CIIP) применяется к текущей единице CU. Как указывает само название, комбинированный режим прогнозирования CIIP осуществляет комбинирование сигнала межкадрового прогнозирования и сигнала внутрикадрового прогнозирования. Сигнал Pinter межкадрового прогнозирования в комбинированном режиме CIIP получают с использованием той же самой процедуры межкадрового прогнозирования, какая применена к обычному, регулярному режиму объединения; и сигнал Pintra внутрикадрового прогнозирования определяют с использованием применяемого в комбинированном режиме CIIP режима внутрикадрового прогнозирования, следуя обычной, регулярной процедуре внутрикадрового прогнозирования в планарном режиме. Затем сигналы внутрикадрового и межкадрового прогнозирования комбинируют посредством взвешенного усреднения, где значение весового коэффициента вычисляют в зависимости от режимов кодирования для соседних блоков сверху и слева (показаны на фиг. 16) следующим образом:
- Если сосед сверху доступен и кодирован с применением внутрикадрового прогнозирования, тогда параметр isIntraTop устанавливают равным 1, в противном случае параметр isIntraTop устанавливают равным 0;
- Если сосед слева доступен и кодирован с применением внутрикадрового прогнозирования, тогда параметр isIntraLeft устанавливают равным 1, в противном случае параметр isIntraLeft устанавливают равным 0;
- Если (isIntraLeft + isIntraTop) равно 2, тогда весовой коэффициент wt устанавливают равным 3;
- В противном случае, если (isIntraLeft + isIntraTop) равно 1, тогда весовой коэффициент wt устанавливают равным 2;
- В противном случае, весовой коэффициент wt устанавливают равным 1.
Результат комбинированного прогнозирования CIIP формируют следующим образом:

На фиг. 16 показаны верхний и левый соседние блоки, используемые для определения весовых коэффициентов для комбинированного режима прогнозирования CIIP
2.3. Процедура определения внутрикадрового прогнозирования
В сегодняшней версии документа VTM-4.0, при кодировании одного блока с применением внутрикадрового прогнозирования сначала в виде сигнализации передают один флаг наиболее вероятного режима (MPM). Если флаг режима MPM является истинным, тогда далее сигнализируют индекс к списку режимов MPM. В противном случае передают в виде сигнализации индекс к режимам, не являющимся режимами MPM.
Относящиеся к делу синтаксические элементы, симметрия и процедура декодирования в самой последней версии стандарта кодирования VVC (JVET-M1001_v7) имеют следующий вид:
Относящийся к делу синтаксис
Синтаксис единиц кодирования
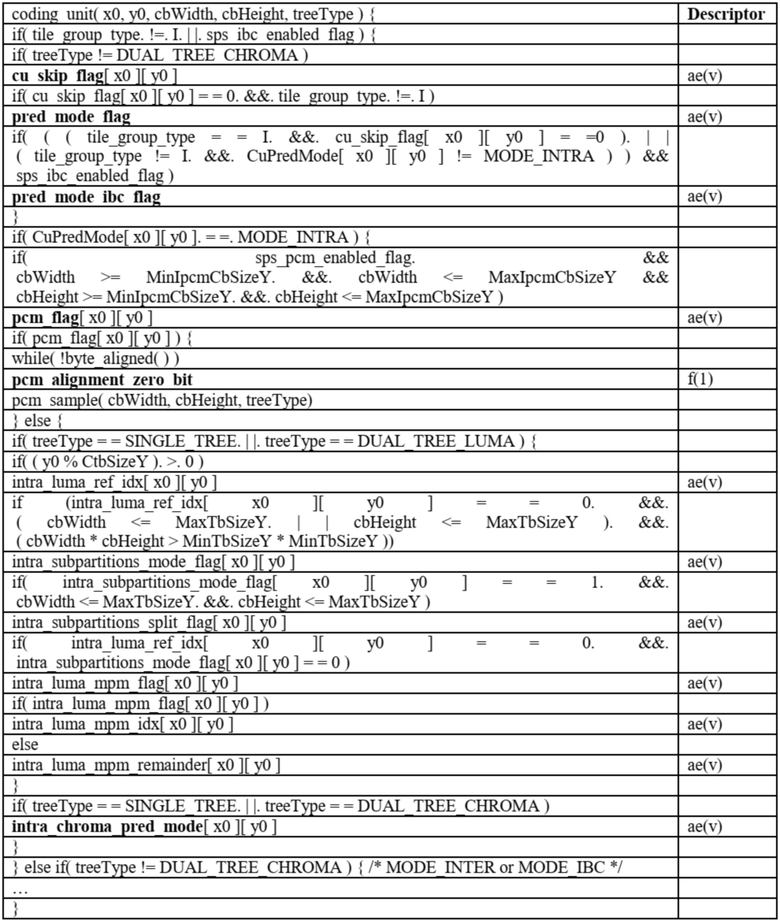
Семантика
Синтаксические элементы intra_luma_mpm_flag[ x0 ][ y0 ], intra_luma_mpm_idx[ x0 ][ y0 ] и intra_luma_mpm_remainder[ x0 ][ y0 ] специфицируют режим внутрикадрового прогнозирования для отсчетов яркостной составляющей. Индексы x0, y0 массива специфицируют позицию ( x0 , y0 ) верхнего левого отсчета яркостной составляющей рассматриваемого блока кодирования относительно верхнего левого отсчета яркостной составляющей изображения. Когда параметр intra_luma_mpm_flag[ x0 ][ y0 ] равен 1, режим внутрикадрового прогнозирования выводят от соседней единицы кодирования с внутрикадровым прогнозированием в соответствии со статьей 8.4.2.
Когда параметр intra_luma_mpm_flag[ x0 ][ y0 ] не присутствует, его считают равным 1.
Процедура декодирования
Процедура вывода для режима внутрикадрового прогнозирования яркостной составляющей
Входными данными для этой процедуры являются:
позиция ( xCb , yCb ) яркостной составляющей, специфицирующая верхний левый отсчет текущего блока кодирования яркостной составляющей относительно верхнего левого отсчета яркостной составляющей текущего изображения,
переменная cbWidth, специфицирующая ширину текущего блока кодирования в отсчетах яркостной составляющей,
переменная cbHeight, специфицирующая высоту текущего блока кодирования в отсчетах яркостной составляющей.
В этой процедуре определяют параметр IntraPredModeY[ xCb ][ yCb ] режима внутрикадрового прогнозирования яркостной составляющей.
Таблица 8-1 специфицирует значения параметра IntraPredModeY[ xCb ][ yCb ] для режима внутрикадрового прогнозирования и ассоциированные названия.
Таблица 8-1. Спецификация режимов внутрикадрового прогнозирования и ассоциированных названий
Примечание: Режимы внутрикадрового прогнозирования INTRA_LT_CCLM, INTRA_L_CCLM и INTRA_T_CCLM применимы только к цветностным составляющим.
Параметр IntraPredModeY[xCb][yCb] определяют посредством следующих упорядоченных этапов:
1. Соседние позиции ( xNbA, yNbA ) и ( xNbB, yNbB ) устанавливают равными ( xCb − 1, yCb + cbHeight − 1 ) и ( xCb + cbWidth − 1, yCb − 1 ), соответственно.
2. Для X, замененного на A или B, переменные candIntraPredModeX определяют следующим образом:
- Процедуру определения доступности для блока, как это специфицировано в статье 6.4.X, [Ред. (BB): Процедура проверки доступности соседних блоков еще должна быть определена] привлекают с того, что позицию ( xCurr, yCurr ) устанавливают равной ( xCb, yCb ) и соседнюю позицию ( xNbY, yNbY ) устанавливают равной ( xNbX, yNbX ) в качестве входных данных, а выходные данные присваивают параметру availableX.
- Режим-кандидат внутрикадрового прогнозирования candIntraPredModeX определяют следующим образом:
- Если одно или более из следующих условий являются истинными, параметр candIntraPredModeX устанавливают равным INTRA_PLANAR.
- Переменной availableX присвоено значение «ЛОЖНО» (FALSE).
- Параметр CuPredMode[ xNbX ][ yNbX ] не равен MODE_INTRA флаг ciip_flag[ xNbX ][ yNbX ] не равен 1.
- Флаг pcm_flag[ xNbX ][ yNbX ] равен 1.
- X равен B и yCb − 1 меньше ( ( yCb. >>. CtbLog2SizeY ). <<. CtbLog2SizeY ).
- В противном случае, параметр candIntraPredModeX устанавливают равным параметру IntraPredModeY[ xNbX ][ yNbX ].
3. Переменные ispDefaultMode1 и ispDefaultMode2 определяют следующим образом:
- Если параметр IntraSubPartitionsSplitType равен ISP_HOR_SPLIT, параметр ispDefaultMode1 устанавливают равным INTRA_ANGULAR18 и параметр ispDefaultMode2 устанавливают равным INTRA_ANGULAR5.
- В противном случае, параметр ispDefaultMode1 устанавливают равным INTRA_ANGULAR50 и параметр ispDefaultMode2 устанавливают равным INTRA_ANGULAR63.
4. Параметр candModeList[ x ] при x = 0..5 определяют следующим образом:
- Если параметр candIntraPredModeB равен candIntraPredModeA и параметр candIntraPredModeA больше INTRA_DC, параметр candModeList[ x ] при x = 0..5 определяют следующим образом:
- Если параметр IntraLumaRefLineIdx[ xCb ][ yCb ] равен 0 и параметр IntraSubPartitionsSplitType равен ISP_NO_SPLIT, применяется следующее:
candModeList[ 0 ] = candIntraPredModeA (8-9)
candModeList[ 1 ] = INTRA_PLANAR (8-10)
candModeList[ 2 ] = INTRA_DC (8-11)
candModeList[ 3 ] = 2 + ( ( candIntraPredModeA + 61 ) % 64 ) (8-12)
candModeList[ 4 ] = 2 + ( ( candIntraPredModeA − 1 ) % 64 ) (8-13)
candModeList[ 5 ] = 2 + ( ( candIntraPredModeA + 60 ) % 64 ) (8-14)
- В противном случае (параметр IntraLumaRefLineIdx[ xCb ][ yCb ] не равен 0 или параметр IntraSubPartitionsSplitType не равен ISP_NO_SPLIT), применяется следующее:
candModeList[ 0 ] = candIntraPredModeA (8-15)
candModeList[ 1 ] = 2 + ( ( candIntraPredModeA + 61 ) % 64 ) (8-16)
candModeList[ 2 ] = 2 + ( ( candIntraPredModeA − 1 ) % 64 ) (8-17)
- Если одно из следующих условий является истинным,
- Параметр IntraSubPartitionsSplitType равен ISP_HOR_SPLIT и параметр candIntraPredModeA. меньше INTRA_ANGULAR34,
- Параметр IntraSubPartitionsSplitType равен ISP_VER_SPLIT и параметр candIntraPredModeA. не меньше INTRA_ANGULAR34,
- Параметр IntraLumaRefLineIdx[ xCb ][ yCb ] не равен 0, применяется следующее:
candModeList[ 3 ] = 2 + ( ( candIntraPredModeA + 60 ) % 64 ) (8-18)
candModeList[ 4 ] = 2 + ( candIntraPredModeA % 64 ) (8-19)
candModeList[ 5 ] = 2 + ( ( candIntraPredModeA + 59 ) % 64 ) (8-20)
- В противном случае, применяется следующее:
candModeList[ 3 ] = ispDefaultMode1 (8-21)
candModeList[ 4 ] = ispDefaultMode2 (8-22)
candModeList[ 5 ] = INTRA_PLANAR (8-23)
- В противном случае, если параметр candIntraPredModeB не равен candIntraPredModeA и candIntraPredModeA или параметр candIntraPredModeB больше INTRA_DC, применяется следующее:
- Переменные minAB и maxAB определяют следующим образом:
minAB = Min( candIntraPredModeA, candIntraPredModeB ) (8-24)
maxAB = Max( candIntraPredModeA, candIntraPredModeB ) (8-25)
- Если параметры candIntraPredModeA и candIntraPredModeB оба больше INTRA_DC, параметр candModeList[ x ] при x = 0..5 определяют следующим образом:
candModeList[ 0 ] = candIntraPredModeA (8-26)
candModeList[ 1 ] = candIntraPredModeB (8-27)
- Если параметр IntraLumaRefLineIdx[ xCb ][ yCb ] равен 0 и параметр IntraSubPartitionsSplitType равен ISP_NO_SPLIT, применяется следующее:
candModeList[ 2 ] = INTRA_PLANAR (8-28)
candModeList[ 3 ] = INTRA_DC (8-29)
- Если maxAB − minAB находится в диапазоне от 2 до 62, включительно, применяется следующее:
candModeList[ 4 ] = 2 + ( ( maxAB + 61 ) % 64 ) (8-30)
candModeList[ 5 ] = 2 + ( ( maxAB − 1 ) % 64 ) (8-31)
- В противном случае, применяется следующее:
candModeList[ 4 ] = 2 + ( ( maxAB + 60 ) % 64 ) (8-32)
candModeList[ 5 ] = 2 + ( ( maxAB ) % 64 ) (8-33)
- В противном случае параметр (IntraLumaRefLineIdx[ xCb ][ yCb ] не равен 0 или параметр IntraSubPartitionsSplitType не равен ISP_NO_SPLIT), применяется следующее:
- Когда параметр IntraSubPartitionsSplitType не равен ISP_NO_SPLIT, и abs( candIntraPredModeB − ispDefaultMode1 ) меньше abs( candIntraPredModeA − ispDefaultMode1 ), применяется следующее:
candModeList[ 0 ] = candIntraPredModeB (8-34)
candModeList[ 1 ] = candIntraPredModeA (8-35)
- Если maxAB − minAB равно 1, применяется следующее:
candModeList[ 2 ] = 2 + ( ( minAB + 61 ) % 64 ) (8-36)
candModeList[ 3 ] = 2 + ( ( maxAB − 1 ) % 64 ) (8-37)
candModeList[ 4 ] = 2 + ( ( minAB + 60 ) % 64 ) (8-38)
candModeList[ 5 ] = 2 + ( maxAB % 64 ) (8-39)
- В противном случае если maxAB − minAB равно 2, применяется следующее:
candModeList[ 2 ] = 2 + ( ( minAB − 1 ) % 64 ) (8-40)
candModeList[ 3 ] = 2 + ( ( minAB + 61 ) % 64 ) (8-41)
candModeList[ 4 ] = 2 + ( ( maxAB − 1 ) % 64 ) (8-42)
candModeList[ 5 ] = 2 + ( ( minAB + 60 ) % 64 ) (8-43)
- В противном случае если maxAB − minAB больше 61, применяется следующее:
candModeList[ 2 ] = 2 + ( ( minAB − 1 ) % 64 ) (8-44)
candModeList[ 3 ] = 2 + ( ( maxAB + 61 ) % 64 ) (8-45)
candModeList[ 4 ] = 2 + ( minAB % 64 ) (8-46)
candModeList[ 5 ] = 2 + ( ( maxAB + 60 ) % 64 ) (8-47)
- В противном случае, применяется следующее:
candModeList[ 2 ] = 2 + ( ( minAB + 61 ) % 64 ) (8-48)
candModeList[ 3 ] = 2 + ( ( minAB − 1 ) % 64 ) (8-49)
candModeList[ 4 ] = 2 + ( ( maxAB + 61 ) % 64 ) (8-50)
candModeList[ 5 ] = 2 + ( ( maxAB − 1 ) % 64 ) (8-51)
- В противном случае (параметр candIntraPredModeA или параметр candIntraPredModeB больше INTRA_DC), параметр candModeList[ x ] при x = 0..5 определяют следующим образом:
- Если параметр IntraLumaRefLineIdx[ xCb ][ yCb ] равен 0 и параметр IntraSubPartitionsSplitType равен ISP_NO_SPLIT, применяется следующее:
candModeList[ 0 ] = candIntraPredModeA (8-52)
candModeList[ 1 ] = candIntraPredModeB (8-53)
candModeList[ 2 ] = 1 − minAB (8-54)
candModeList[ 3 ] = 2 + ( ( maxAB + 61 ) % 64 ) (8-55)
candModeList[ 4 ] = 2 + ( ( maxAB − 1 ) % 64 ) (8-56)
candModeList[ 5 ] = 2 + ( ( maxAB + 60 ) % 64 ) (8-57)
- В противном случае, если параметр IntraLumaRefLineIdx[ xCb ][ yCb ] не равен 0, применяется следующее:
candModeList[ 0 ] = maxAB (8-58)
candModeList[ 1 ] = 2 + ( ( maxAB + 61 ) % 64 ) (8-59)
candModeList[ 2 ] = 2 + ( ( maxAB − 1 ) % 64 ) (8-60)
candModeList[ 3 ] = 2 + ( ( maxAB + 60 ) % 64 ) (8-61)
candModeList[ 4 ] = 2 + ( maxAB % 64 ) (8-62)
candModeList[ 5 ] = 2 + ( ( maxAB + 59 ) % 64 ) (8-63)
- В противном случае (параметр IntraSubPartitionsSplitType не равен ISP_NO_SPLIT), применяется следующее:
candModeList[ 0 ] = INTRA_PLANAR (8-64)
candModeList[ 1 ] = maxAB (8-65)
candModeList[ 2 ] = 2 + ( ( maxAB + 61 ) % 64 ) (8-66)
candModeList[ 3 ] = 2 + ( ( maxAB − 1 ) % 64 ) (8-67)
candModeList[ 4 ] = 2 + ( ( maxAB + 60 ) % 64 ) (8-68)
candModeList[ 5 ] = 2 + ( maxAB % 64 ) (8-69)
- В протимвном случае, применяется следующее:
- Если параметр IntraLumaRefLineIdx[ xCb ][ yCb ] равен 0 и параметр IntraSubPartitionsSplitType равен ISP_NO_SPLIT, применяется следующее:
candModeList[ 0 ] = candIntraPredModeA (8-70)
candModeList[ 1 ] = ( candModeList[0]. = =. INTRA_PLANAR ). ?. INTRA_DC. :. (8-71)
INTRA_PLANAR
candModeList[ 2 ] = INTRA_ANGULAR50 (8-72)
candModeList[ 3 ] = INTRA_ANGULAR18 (8-73)
candModeList[ 4 ] = INTRA_ANGULAR46 (8-74)
candModeList[ 5 ] = INTRA_ANGULAR54 (8-75)
- В противном случае, если параметр IntraLumaRefLineIdx[ xCb ][ yCb ] не равен 0, применяется следующее:
candModeList[ 0 ] = INTRA_ANGULAR50 (8-76)
candModeList[ 1 ] = INTRA_ANGULAR18 (8-77)
candModeList[ 2 ] = INTRA_ANGULAR2 (8-78)
candModeList[ 3 ] = INTRA_ANGULAR34 (8-79)
candModeList[ 4 ] = INTRA_ANGULAR66 (8-80)
candModeList[ 5 ] = INTRA_ANGULAR26 (8-81)
- В противном случае, если параметр IntraSubPartitionsSplitType равен ISP_HOR_SPLIT, применяется следующее:
candModeList[ 0 ] = INTRA_PLANAR (8-82)
candModeList[ 1 ] = INTRA_ANGULAR18 (8-83)
candModeList[ 2 ] = INTRA_ANGULAR25 (8-84)
candModeList[ 3 ] = INTRA_ANGULAR10 (8-85)
candModeList[ 4 ] = INTRA_ANGULAR65 (8-86)
candModeList[ 5 ] = INTRA_ANGULAR50 (8-87)
- В противном случае, если параметр IntraSubPartitionsSplitType равен ISP_VER_SPLIT, применяется следующее:
candModeList[ 0 ] = INTRA_PLANAR (8-88)
candModeList[ 1 ] = INTRA_ANGULAR50 (8-89)
candModeList[ 2 ] = INTRA_ANGULAR43 (8-90)
candModeList[ 3 ] = INTRA_ANGULAR60 (8-91)
candModeList[ 4 ] = INTRA_ANGULAR3 (8-e)
candModeList[ 5 ] = INTRA_ANGULAR18 (8-93)
5. Параметр IntraPredModeY[ xCb ][ yCb ] получают в результате применения следующей процедуры:
- Если флаг intra_luma_mpm_flag[ xCb ][ yCb ] равен 1, параметр IntraPredModeY[ xCb ][ yCb ] устанавливают равным. candModeList[ intra_luma_mpm_idx[ xCb ][ yCb ] ].
- В противном случае, параметр IntraPredModeY[ xCb ][ yCb ] получают в результате применения следующих упорядоченных этапов:
1. Когда параметр candModeList[ i ] больше candModeList[ j ] для i = 0..4 и для каждого i, j = ( i + 1 )..5, оба значения заменяют следующим образом:
( candModeList[ i ], candModeList[ j ] ) = Swap( candModeList[ i ], candModeList[ j ] ) (8-94)
2. Параметр IntraPredModeY[ xCb ][ yCb ] получают в результате применения следующих упорядоченных этапов:
i. Параметр IntraPredModeY[ xCb ][ yCb ] устанавливают равным intra_luma_mpm_remainder[ xCb ][ yCb ].
ii. Для i равного 0 – 5, включительно, когда параметр IntraPredModeY[ xCb ][ yCb ] не меньше candModeList[ i ], значение IntraPredModeY[ xCb ][ yCb ] увеличивают на единицу.
Переменную IntraPredModeY[ x ][ y ] при. x = xCb..xCb + cbWidth − 1 и y = yCb..yCb + cbHeight − 1 устанавливают равной IntraPredModeY[ xCb ][ yCb ].
3. Примеры проблем, решаемых вариантами изобретения
В режиме компенсации LIC, два параметра, включая параметр масштабирования (масштабный коэффициент) a и сдвиг b необходимо определять с использованием соседних реконструированных отсчетов, что может вызвать проблемы с задержкой.
Группа допустимых весовых коэффициентов, используемых при прогнозировании GBI, является фиксированной, что может быть неэффективным.
Комбинированный режим прогнозирования CIIP применяется только к режиму объединения, не являющемуся режимом пропуска, что может быть неэффективным.
В сегодняшней версии, флаг комбинированного режима CIIP следует сохранять, поскольку для процедуры определения режима внутрикадрового прогнозирования для блока, кодируемого в режиме внутрикадрового прогнозирования, и для процедуры определения режима внутрикадрового прогнозирования для блоков, кодируемых в комбинированном режиме CIIP, используется флаг комбинированного режима CIIP для соседнего блока.
В сегодняшней версии, можно далее улучшить определение весовых коэффициентов для комбинированного режима CIIP, например, проверка двух соседних блоков и трех разных пар весовых коэффициентов может быть упрощена.
В сегодняшней версии, в процессе определения весовых коэффициентов для комбинированного режима прогнозирования CIIP, если соседний блок кодирован в режиме. дельта-импульсно-кодовой модуляции на блочной основе (BDPCM), это считается режимом внутрикадрового прогнозирования. Однако может оказаться более разумным считать, что этот режим не является режим внутрикадрового прогнозирования, поскольку режим модуляции BDPCM рассчитан на кодирование контента экрана.
4. Примеры вариантов
В дальнейшем термин «блок» будет использоваться для обозначения единицы преобразования (transform unit (TU))/единицы прогнозирования (prediction unit (PU))/единицы кодирования (coding unit (CU))/суб-блока в одной из единиц TU/PU/CU и т.п.
Приведенные ниже подробные описания способов следует рассматривать в качестве примеров для пояснения общих концепций. Эти способы не следует интерпретировать в узком смысле. Более того, эти способы можно комбинировать каким-либо образом.
Предположим, что координаты (xCb, yCb) обозначают позицию верхнего левого отсчета текущего блока относительно верхнего левого отсчета текущего изображения, параметры cbWidth и cbHeight специфицируют ширину и высоту текущего блока.
1. Флаг режима прогнозирования CIIP или/и флаг компенсации LIC или/и флаг рассеивающей фильтрации или/и флаг двусторонней фильтрации или/и флаг фильтрации в преобразованной области или/и флаг активизации пост-реконструкционной фильтрации какого-либо другого типа может быть ограничен, чтобы быть ложным (false) (и комбинированный режим прогнозирования CIIP или/и компенсация LIC или/и рассеивающий фильтр или/и двусторонний фильтр или/и фильтр преобразованной области могут быть неявно не активизированы), в зависимости от режимов кодирования других блоков (таких как смежные или несмежные соседние блоки и/или опорные блоки).
a. Когда один флаг определен в качестве ложного, соответствующий способ может не применяться.
b. Когда один флаг определен в качестве ложного, передачу сигнализации с индикацией использования таких режимов пропускают.
c. Когда один флаг определен в качестве ложного, индикацию использования таких режимов можно все равно передавать в виде сигнализации, однако значения такой индикации ограничены, чтобы быть ложными, в потоке битов данных соответствия, и такие режимы не применяются.
d. В одном из примеров, применять ли одно или более из нескольких предлагаемых ограничений (таких как 1.a, 1.b и 1.c) или нет, может зависеть от режимов кодирования всех или некоторых смежных и/или несмежных соседних строк или столбцов.
i. В качестве альтернативы, применять ли такое ограничение или нет, может зависеть по меньшей мере от числа N (N >= 1) отсчетов в смежных или несмежных соседних строках или столбцах, которые НЕ кодируют в определенных режимах.
e. В одном из примеров, к смежным или несмежным соседним строкам могут относиться строка сверху и/или строка сверху справа.
f. В одном из примеров, к смежным или несмежным соседним столбцам могут относиться столбец слева и/или снизу слева и/или верхний левый угол.
g. В одном из примеров, к указанным определенным режимам для блока, не являющегося текущим блоком, могут относиться режим внутрикадрового прогнозирования и/или режим комбинированного прогнозирования CIIP и/или режим с применением ссылки на текущее изображение в качестве опоры (CPR).
h. В одном из примеров, если какой-либо один из соседних/несмежных блоков в соседних и/или несмежных строках или столбцах кодируют в определенном режиме (например, режиме внутрикадрового и/или комбинированного прогнозирования CIIP и/или режиме CPR), применяют одно или несколько из предложенных ограничений (таких как 1.a, 1.b и 1.c).
i. В одном из примеров, если все соседние/несмежные блоки в смежных и/или несмежных соседних строках или столбцах кодированы в определенном режиме (например, режиме внутрикадрового прогнозирования и/или комбинированном режиме CIIP и/или режиме CPR), применяются одно или несколько из предлагаемых ограничений.
j. В одном из примеров, если по меньшей мере N соседних/несмежных блоков в соседней или несмежной строке или столбцах НЕ кодируют в определенном режиме (например, режиме внутрикадрового и/или комбинированного прогнозирования CIIP и/или режиме CPR), одно или несколько из предлагаемых ограничений (таких как 1.a, 1.b и 1.c) НЕ применяются.
k. В одном из примеров, следует ли применить одно или несколько из предлагаемых ограничений (таких как 1.a, 1.b и 1.c) или нет, может зависеть от позиции текущего блока.
i. В одном из примеров, если текущий блок находится сверху в текущей единице CTU (текущий блок и соседний с ним сверху блок принадлежат разным единицам CTU), предлагаемые ограничения не применяются.
ii. В одном из примеров, если текущий блок находится на левой стороне от текущей единицы CTU (текущий блок и соседний с ним блок слева принадлежат разным единицам CTU), предлагаемые ограничения не применяются.
2. Флаг режима прогнозирования CIIP и/или режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP могут быть сохранены вместе с информацией о движении в таблице прогнозирования вектора движения на основе предыстории (HMVP).
a. В одном из примеров, при сравнении информации о движении для двух кандидатов (например, в ходе процедуры усечения), не учитывают флаг режима прогнозирования CIIP или/и режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP.
b. В одном из примеров, при сравнении информации о движении для двух кандидатов (например, в ходе процедуры усечения), учитывают флаг режима прогнозирования CIIP или/и режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP.
c. В одном из примеров, когда объединяемый кандидат взят из одной из входных позиций таблицы прогнозирования HMVP, флаг режима прогнозирования CIIP для этой входной позиции также копируют в объединяемого кандидата.
d. В одном из примеров, когда объединяемый кандидат взят из одной из входных позиций таблицы прогнозирования HMVP, флаг режима прогнозирования CIIP и индикацию режима внутрикадрового прогнозирования из этой входной позиции также копируют в объединяемого кандидата.
3. Комбинированный режим прогнозирования CIIP может быть также реализован для режима прогнозирования AMVP (режим прогнозирования AMVP или/и прогнозирования AMVP с режимом разностей SMVD)
a. Флаг комбинированного режима прогнозирования CIIP и/или режима внутрикадрового прогнозирования из режима прогнозирования CIIP для соседних/несмежных блоков может быть «унаследован» в режиме объединения или/и режиме выражения UMVE (также известен как режим объединения с разностями векторов движения (merge with motion vector difference), сокращенно MMVD) для текущего блока.
b. Флаг комбинированного режима прогнозирования CIIP и/или режима внутрикадрового прогнозирования из режима прогнозирования CIIP может быть передан в виде сигнализации для режима объединения, не являющегося режимом пропуска или/и режима выражения UMVE, не являющегося режимом пропуска, и флаг комбинированного режима прогнозирования CIIP и/или режима внутрикадрового прогнозирования из режима прогнозирования CIIP для соседних/несмежных блоков может быть «унаследован» в являющихся режимами пропуска режиме объединения или/и режиме UMVE.
c. Флаг комбинированного режима прогнозирования CIIP и/или режима внутрикадрового прогнозирования из режима прогнозирования CIIP может быть передан в виде сигнализации для являющихся режимами пропуска режима объединения или/и режима выражения UMVE, и флаг комбинированного режима прогнозирования CIIP и/или режима внутрикадрового прогнозирования из режима прогнозирования CIIP для соседних/несмежных блоков может быть «унаследован» в не являющихся режимами пропуска режиме объединения или/и режиме выражения UMVE.
d. В одном из примеров, флаг комбинированного режима прогнозирования CIIP и режима внутрикадрового прогнозирования может быть сообщен в виде сигнализации в режиме прогнозирования AMVP.
e, В одном из примеров, флаг комбинированного режима прогнозирования CIIP может быть унаследован в режиме объединения или/и в режиме выражения UMVE, и если флаг комбинированного режима прогнозирования CIIP является истинным, сигнализация о режиме внутрикадрового прогнозирования может быть передана дополнительно, если в режиме комбинированного прогнозирования CIIP допускаются больше одного режима внутрикадрового прогнозирования.
f. В одном из примеров, флаг комбинированного режима прогнозирования CIIP и режима внутрикадрового прогнозирования для соседних/несмежных блоков в режим объединения или/и режиме выражения UMVE может быть унаследован текущим блоком.
g. В одном из примеров, режим прогнозирования CIIP может не быть активизирован для режима пропуска.
h. В одном из примеров, при сравнении двух объединяемых кандидатов может не учитываться флаг комбинированного режима прогнозирования CIIP или/и режима внутрикадрового прогнозирования CIIP.
i. В одном из примеров, при сравнении двух объединяемых кандидатов может учитываться флаг комбинированного режима прогнозирования CIIP или/и режима внутрикадрового прогнозирования CIIP.
4. Режим комбинированного прогнозирования CIIP может не быть активизирован для попарного прогнозирования или комбинированного двунаправленного прогнозирования или других видов виртуальных/искусственных кандидатов (например, кандидатов с нулевым вектором движения).
a. В качестве альтернативы, если один из двух кандидатов, участвующих в попарном прогнозировании или комбинированном двунаправленном прогнозировании принимает комбинированное прогнозирование CIIP, режим комбинированного прогнозирования CIIP может быть активизирован для попарно или двунаправлено прогнозируемого объединяемого кандидата.
ii. В одном из примеров, режим внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP может быть унаследован.
iii. В одном из примеров, индикация режима внутрикадрового прогнозирования может быть в явном виде передана в форме сигнализации.
b. В качестве альтернативы, если оба кандидата, участвующих в попарном прогнозировании или комбинированном двунаправленном прогнозировании принимают комбинированное прогнозирование CIIP, режим комбинированного прогнозирования CIIP может быть активизирован для попарно или двунаправлено прогнозируемого объединяемого кандидата.
iv. В одном из примеров, режим внутрикадрового прогнозирования для одного из двух кандидатов может быть унаследован.
v. В одном из примеров, режим внутрикадрового прогнозирования может быть определен из совокупности режимов внутрикадрового прогнозирования для двух кандидатов и использован для попарно или двунаправлено прогнозируемого объединяемого кандидата.
vi. В одном из примеров, индикация режима внутрикадрового прогнозирования может быть сообщена в форме сигнализации в явном виде.
5. Соседние и/или несмежные пространственно реконструированные отсчеты, требуемые в режиме комбинированного прогнозирования CIIP или/и для рассеивающей фильтрации или/и для двусторонней фильтрации или/и для фильтрации в преобразованной области или/и для активизации пост-реконструкционной фильтрации другого типа, могут быть заменены соответствующими отсчетами в опорных изображениях (такими как соседними и/или несмежными пространственно отсчетами опорного блока, как показано на фиг. 17).
a. В одном из примеров, если текущий блок прогнозируют в двух направлениях, соседние отсчеты из двух опорных блоков могут быть усреднены для генерации окончательных соседних отсчетов.
b. В одном из примеров, если текущий блок прогнозируют в двух направлениях, соседние отсчеты одного из двух опорных блоков могут быть использованы в качестве окончательных соседних отсчетов.
c. В одном из примеров, если текущий блок прогнозируют в двух направлениях, соседние отсчеты из двух опорных блоков могут быть подвергнуты взвешенному усреднению для генерации окончательных соседних отсчетов, если прогнозирование GBI с неравными весовыми коэффициентами, или взвешенное прогнозирование, или компенсацию LIC применяют к текущему блоку.
d. В одном из примеров, соответствующие отсчеты в опорных изображениях (например, соседние отсчеты опорного блока) могут быть идентифицированы посредством информации о движении для текущего блока.
e. В одном из примеров, соответствующие отсчеты в опорных изображениях (например, соседние отсчеты из опорного блока) могут быть идентифицированы посредством модифицированной информации о движении текущего блока. Например, вектор движения может быть округлен до целочисленной точности прежде использования для идентификации соседних отсчетов.
f. В одном из примеров, соответствующие отсчеты в опорных изображениях (например, соседние отсчеты из опорных отсчетов) идентифицированы посредством векторов движения с точностью до целого элемента изображения.
i. В одном из примеров, вектор MV, относящийся к опорному блоку, сначала округляют до целого пикселя. Округленный вектор MV используют для идентификации соседних отсчетов опорного блока.
ii. В одном из примеров, предлагаемую замену применяют, когда текущий блок кодируют с использованием информации о движении с точностью до целого пикселя. Поэтому округление не требуется.
g. В одном из примеров, предлагаемая замена может быть применена только для определенной цветовой составляющей, такой как яркостная составляющая.
i. В качестве альтернативы, предлагаемая замена может быть применена для всех цветовых составляющих.
6. Предлагается не допустить использования ранее кодированных флагов режима комбинированного прогнозирования CIIP для кодирования следующих блоков.
a. В одном из примеров, процедуру проверки флагов режима комбинированного прогнозирования CIIP из ранее кодированных блоков пропускают для повышения пропускной способности.
b. В одном из примеров, процедуру проверки флагов режима комбинированного прогнозирования CIIP из соседних блоков при определении режима внутрикадрового прогнозирования пропускают.
i. В одном из примеров, для одного соседнего блока, если его кодируют в режиме комбинированного прогнозирования CIIP, в качестве ассоциированного режима внутрикадрового прогнозирования может быть установлен некий конкретный режим (такой как планарный режим). В качестве альтернативы, кроме того, ассоциированный режим внутрикадрового прогнозирования может быть использован при формировании списка режимов MPM.
ii. В одном из примеров, для одного соседнего блока, если его кодируют в режиме комбинированного прогнозирования CIIP или в обычном режиме межкадрового прогнозирования, в качестве ассоциированного режима внутрикадрового прогнозирования может быть установлен некий конкретный режим (такой как планарный режим). В качестве альтернативы, кроме того, ассоциированный режим внутрикадрового прогнозирования может быть использован при формировании списка режимов MPM.
iii. В одном из примеров, индикация режима внутрикадрового прогнозирования для блоков, кодированных в комбинированном режиме прогнозирования CIIP, может быть не сохранена, а блоки, кодированные в комбинированном режиме прогнозирования CIIP, могут считаться недоступными в процессе декодирования. В качестве альтернативы, блоки, кодированные в комбинированном режиме прогнозирования CIIP, можно рассматривать таким же способом, как в обычном режиме межкадрового прогнозирования.
c. В качестве альтернативы, более того, предлагается удалить флаг комбинированного режима прогнозирования CIIP из запоминающего устройства, чтобы сберечь требуемый размер памяти для хранения информации о режиме.
7. Предлагается, чтобы флаг комбинированного режима прогнозирования CIIP был кодирован посредством обходного кодирования.
a. В качестве альтернативы, флаг комбинированного режима прогнозирования CIIP может быть кодирован контекстно-зависимым способом без ссылок на флаги комбинированного режима прогнозирования CIIP для соседних блоков.
8. Предлагается, чтобы способ построения взвешенной суммы в комбинированном режиме прогнозирования CIIP мог зависеть от цветовых составляющих.
a. Например, значения весовых коэффициентов в комбинированном режиме CIIP различаются для главной цветовой составляющей (например, составляющей G) и для других цветовых составляющих (например, составляющих B и R).
b. Например, значения весовых коэффициентов в комбинированном режиме CIIP различаются для яркостной составляющей и для цветностных составляющих.
c. Например, значения весовых коэффициентов для межкадрового прогнозирования и внутрикадрового прогнозирования равны для цветностных составляющих.
9. Предлагается, чтобы, когда выбор весовых коэффициентов осуществляется в соответствии с соседними блоками, тогда соседний блок, если он кодируется в режиме комбинированного прогнозирования CIIP, можно рассматривать в качестве блока, кодируемого в режиме межкадрового прогнозирования.
a. В качестве альтернативы, когда выбор весовых коэффициентов осуществляется в соответствии с соседними блоками, тогда соседний блок, если он кодируется в режиме комбинированного прогнозирования CIIP, можно рассматривать в качестве блока, кодируемого в режиме внутрикадрового прогнозирования.
10. Предлагаемый выше способ может быть применен при определенных условиях, таких как размеры блока, типы среза/изображения/плитки или информация о движении.
a. В одном из примеров, когда блок содержит меньше M*H отсчетов, например, 16 или 32 или 64 отсчета яркостной составляющей, применение предлагаемого способа не допускается.
b. В качестве альтернативы, когда минимальное значение ширины или/и высоты блока меньше или не больше X, применение предлагаемого способа не допускается. В одном из примеров, параметр X устанавливают равным 8.
c. В качестве альтернативы, когда минимальное значение ширины или/и высоты блока не меньше X, применение предлагаемого способа не допускается. В одном из примеров, параметр X устанавливают равным 8.
d. В качестве альтернативы, когда ширина блока > th1 или >=th1 и/или высота блока > th2 или >=th2, применение предлагаемого способа не допускается. В одном из примеров, значение th1 и/или th2 устанавливают равным 8.
e. В качестве альтернативы, когда ширина блока < th1 или <=th1 и/или a высота блока < th2 or <a=th2, применение предлагаемого способа не допускается. В одном из примеров, значение th1 и/или th2 устанавливают равным 8.
11. Число допустимых пар весовых коэффициентов (wIntra, wInter), используемых в комбинированном режиме прогнозирования CIIP, может быть уменьшено от 3 до 2, обозначенных как (a, b) и (c, d).
a. В одном из примеров, эти две пары определены как {(1,3) и (3,1)}; или {(1,3) и (2, 2)}; или {(3,1) и (2, 2)}; или {(3, 5) и (4, 4)} или {(5, 3) и (4, 4)}, или {(1, 7) и (4, 4)} или {(7, 1) и (4, 4)}.
b. В одном из примеров, пару весовых коэффициентов определяют на основе только одного соседнего блока A.
i. В одном из примеров, если один соседний блок A доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (a, b); В противном случае, значения (wIntra, wInter) устанавливают равными (c, d).
ii. В одном из примеров, блок A является соседним блоком слева.
iii. В одном из примеров, блок A является соседним блоком сверху.
c. В одном из примеров, пару весовых коэффициентов определяют на основе двух или более соседних блоков, и по меньшей мере для одного из соседних блоков удовлетворяются определенные условия.
i. В одном из примеров, если по меньшей мере один из соседних блоков A и B доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (a, b); В противном случае, значения (wIntra, wInter) устанавливают равными (c, d).
1. В одном из примеров, блок A является соседним блоком слева, и блок B является соседним блоком сверху.
d. В одном из примеров, пару весовых коэффициентов определяют на основе двух или более соседних блоков и для каждого из соседних блоков удовлетворяются одинаковые условия.
i. В одном из примеров, если оба соседних блока A и B доступны и кодированы в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (a, b); В противном случае, значения (wIntra, wInter) устанавливают равными (c, d).
1. В одном из примеров, блок A является соседним блоком слева и блок B является соседним блоком сверху.
e. В одном из примеров, значения (a, b) и (c, d) могут быть установлены следующим образом:
1. В одном из примеров, (a, b) устанавливают равными (2, 2) или (3, 1).
2. В одном из примеров, (c, d) устанавливают равными (1, 3).
3. В одном из примеров, по меньшей мере одно из двух условий является истинным: a не равно c или b не равно d.
4. (a, b) не равно (c, d).
f. В одном из примеров, соседний блок (например, блок A или B), упомянутый выше, является смежным или несмежным пространственно соседним блоком или временным соседним блоком.
i. В одном из примеров, соседний блок A или B является соседним блоком слева (или сверху).
ii. В одном из примеров, соседние блоки A и B являются соседними блоками слева и сверху, соответственно.
iii. В одном из примеров, соседний блок слева покрывает позицию (xCb − 1, yCb + cbHeight − 1).
iv. В одном из примеров, соседний блок сверху покрывает позицию (xCb + cbWidth − 1, yCb − 1).
v. В одном из примеров, соседний блок слева покрывает позицию (xCb − 1, yCb).
vi. В одном из примеров, соседний блок сверху покрывает позицию (xCb, yCb − 1).
g. Для приведенных выше примеров, комбинированное прогнозирование CIIP осуществляется следующим образом:

где сдвиг (offset) устанавливают равным (1<< (N-1)) или 0, и N может быть установлено равным log2(wIntra + wInter).
12. Число допустимых пар весовых коэффициентов (wIntra, wInter), используемых в комбинированном режиме прогнозирования CIIP может быть уменьшено от 3 до 1.
a. В одном из примеров, одна пара весовых коэффициентов определена как (1,3) или (2, 2) или (1,7) или (2, 6) или (3, 5) или (4, 4).
b. В одном из примеров, значения (wIntra, wInter) устанавливают равными (2, 2).
c. В одном из примеров, значения (wIntra, wInter) устанавливают равными (1, 3).
d. Для приведенных выше примеров, комбинированное прогнозирование CIIP осуществляется следующим образом:
где сдвиг (offset) устанавливают равным (1<< (N-1)) или 0, и N может быть установлено равным log2(wIntra + wInter).
13. Пары весовых коэффициентов (wIntra, wInter) могут быть определены на основе того, кодированы ли один или несколько соседних блоков в комбинированном режиме прогнозирования CIIP.
a. Пара весовых коэффициентов, используемая для текущего блока, может быть определена из тех, какие использовались для ранее кодированного блока.
b. В одном из примеров, пару весовых коэффициентов определяют на основе только одного соседнего блока A.
i. В одном из примеров, если один соседний блок A кодируют в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для этого соседнего блока A; в противном случае, если соседний блок A доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (a, b); в противном случае, значения (wIntra, wInter) устанавливают равными (c, d).
ii. В одном из примеров, если один соседний блок A кодируют в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа; в противном случае, значения (wIntra, wInter) устанавливают равными (a, b).
iii. Для приведенных выше примеров может применяться следующее:
1. В одном из примеров, (a, b) устанавливают равными (2, 2) или (3, 1).
2. В одном из примеров, (c, d) устанавливают равными (1, 3).
3. В одном из примеров, по меньшей мере одно из двух условий является истинным: a не равно c; b не равно d.
c. В одном из примеров, пару весовых коэффициентов определяют на основе двух или более соседних блоков, и по меньшей мере для одного из этих соседних блоков, удовлетворяются определенные условия.
i. Несколько соседних блоков могут быть проверено в конкретном порядке проверки (например, сначала проверяют блок слева, а затем проверяют блок сверху) для идентификации использования комбинированного режима прогнозирования CIIP.
ii. В одном из примеров, если по меньшей мере один из соседних блоков A и B кодируют в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными (wIntra, wInter) для первого соседнего блока, кодированного в комбинированном режиме прогнозирования CIIP в конкретном порядке проверки; в противном случае, если по меньшей мере один из соседних блоков A и B доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (a, b); в противном случае, значения (wIntra, wInter) устанавливают равными (c, d).
iii. Для приведенных выше примеров, может применяться следующее:
1. В одном из примеров, (a, b) устанавливают равными (2, 2) или (3, 1).
2. В одном из примеров, (c, d) устанавливают равными (1, 3).
3. В одном из примеров, по меньшей мере одно из двух условий является истинным: a не равно c; b не равно d.
iv. В одном из примеров, если по меньшей мере один из соседних блоков A и B кодируют в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для первого кодированного в комбинированном режиме CIIP соседнего блока в конкретном порядке проверки; в противном случае, если оба соседних блока A и B доступны и кодированы в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (a, b); в противном случае, значения (wIntra, wInter) устанавливают равными (c, d).
v. В одном из примеров, если по меньшей мере один из соседних блоков A и B кодируют в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для первого кодированного в комбинированном режиме CIIP соседнего блока в конкретном порядке проверки; в противном случае, значения (wIntra, wInter) устанавливают равными (c, d).
vi. Для приведенных выше примеров может применяться следующее:
1. В одном из примеров, (c, d) устанавливают равными (2, 2) или (1, 3).
d. В одном из примеров, соседний блок A или B, отмеченный выше, является смежным или несмежным пространственным соседним блоком или временным соседним блоком.
i. В одном из примеров, соседний блок A или B является соседним блоком слева (или сверху).
ii. В одном из примеров, соседние блоки A и B являются соседними блоками слева и сверху, соответственно.
iii. В одном из примеров, соседний блок слева покрывает позицию (xCb − 1, yCb + cbHeight − 1).
iv. В одном из примеров, соседний блок сверху покрывает позицию (xCb + cbWidth − 1, yCb − 1).
v. В одном из примеров, соседний блок слева покрывает позицию (xCb − 1, yCb).
vi. В одном из примеров, соседний блок сверху покрывает позицию (xCb, yCb − 1).
e. Для приведенных выше примеров, комбинированное прогнозирование CIIP осуществляется следующим образом:
где сдвиг (offset) устанавливают равным (1<< (N-1)) или 0, и N может быть установлено равным log2(wIntra + wInter).
14. Выбор соседних блоков, используемых в комбинированном режиме прогнозирования CIIP может зависеть от кодированной информации, такой как размер блока/форма блока/флаг проверки малой задержки/информация об опорных изображениях/информация о движении текущего блока и соседних блоков/индикация режимов внутрикадрового прогнозирования для соседних блоков.
15. Пары весовых коэффициентов, используемые для комбинированного прогнозируемого CIIP, могут зависеть от кодированной информации, такой как размер блока/форма блока/флаг проверки малой задержки/информация об опорных изображениях/информация о движении текущего блока и соседних блоков/индикация режимов внутрикадрового прогнозирования для соседних блоков.
a. В одном из примеров, далее сообщают в виде сигнализации группу пар весовых коэффициентов.
b. В одном из примеров, выбор пары весовых коэффициентов может зависеть от того, кодируют ли соседний блок в режиме межкадрового прогнозирования вместо внутрикадрового прогнозирования.
16. При определении информации о комбинированном режиме прогнозирования CIIP (например, при определении весовых коэффициентов, применяемых к сигналу внутрикадрового прогнозирования или к сигналу межкадрового прогнозирования для предыдущей конфигурации способа и упомянутых выше разделов), если соседний блок не кодируют в режиме MODE_INTRA (т.е. в режиме внутрикадрового прогнозирования), его можно рассматривать в качестве блока, кодированного в режиме внутрикадрового прогнозирования.
a. В одном из примеров, если соседний блок кодирован в режиме с копированием IBC.
b. В одном из примеров, если соседний блок кодирован в комбинированном режиме прогнозирования CIIP.
c. В одном из примеров, если соседний блок кодирован в режиме треугольного прогнозирования (TPM).
d. В одном из примеров, если соседний блок кодирован в режиме палитры.
e. В одном из примеров, если соседний блок кодирован в режиме модуляции RDPCM.
f. В одном из примеров, если соседний блок кодирован в режиме без преобразования (например, в режиме пропуска преобразования) и/или с применением квантования (например, режим квантования с обходом преобразования).
g. В качестве альтернативы, если соседний блок кодирован в режиме, упомянутом в приведенных выше подразделах (например, режиме копирования IBC, режиме модуляции RDPCM, режиме палитры), этот соседний блок можно рассматривать как блок, кодированный в режиме, не являющемся режимом внутрикадрового кодирования, (например, в режиме межкадрового прогнозирования).
h. В одном из примеров, если соседний блок кодирован в режиме внутрикадрового прогнозирования, но НЕ кодирован в определенных режимах прогнозирования (например, в планарном режиме), этот соседний блок можно рассматривать как блок, кодированный в режиме, не являющемся режимом внутрикадрового кодирования, (например, в режиме межкадрового прогнозирования).
i. В качестве альтернативы, если соседний блок кодирован в режиме внутрикадрового прогнозирования на матричной основе и/или в режиме внутрикадрового прогнозирования с несколькими опорными строками и с неравным K индексом опорной строки (например, K=0) и/или в режиме модуляции BDPCM, этот соседний блок можно рассматривать как блок, кодированный в режиме, не являющемся режимом внутрикадрового кодирования, (например, в режиме межкадрового прогнозирования).
j. Предлагаемые способы могут быть применены к другим инструментам кодирования, которые опираются на то, кодирован ли какой-то соседний блок в режиме внутрикадрового прогнозирования или нет.
k. Предлагаемые способы могут быть применены к другим инструментам кодирования, которые опираются на то, кодирован ли какой-то соседний блок в режиме межкадрового прогнозирования или нет.
17. О том, активизировать или отменить активизацию приведенных выше способов, может быть сообщено в форме сигнализации в наборе SPS/наборе PPS/наборе VPS/заголовке последовательности/заголовке изображения/заголовке среза/заголовке группы плиток/плитке/группе единиц CTU, и т.п.
a. В качестве альтернативы, какой именно способ следует использовать, может быть сообщено в форме сигнализации в наборе SPS/наборе PPS/наборе VPS/заголовке последовательности/заголовке изображения/заголовке среза/заголовке группы плиток/плитке/группе единиц CTU, и т.п.
b. В качестве альтернативы, следует ли активизировать или отменить активизацию приведенных выше способов, и/или, какой именно способ следует применить, зависит от размера блока, единицы обработки данных видео (video processing data unit (VPDU)), типа изображения, флага проверки малой задержки, информации о кодировании текущего блока (такой как опорные изображения, однонаправленное или двунаправленное прогнозирование) или ранее кодированных блоков.
5. Варианты
5.1 Вариант 1
Пример пропуска проверки флагов комбинированного режима прогнозирования CIIP для ранее кодированных блоков описан следующим образом.
8.4.2 Процедура определения режима внутрикадрового прогнозированияяркостной составляющей
Входными данными для этой процедуры являются:
- позиция ( xCb , yCb ) яркостной составляющей, специфицирующая верхний левый отсчет текущего блока кодирования яркостной составляющей относительно верхнего левого отсчета яркостной составляющей для текущего изображения,
- переменная cbWidth, специфицирующая ширину текущего блока кодирования в отсчетах яркостной составляющей,
- переменная cbHeight, специфицирующая высоту текущего блока кодирования в отсчетах яркостной составляющей.
В этой процедуре, определяют индикацию режима IntraPredModeY[ xCb ][ yCb ] внутрикадрового прогнозирования яркостной составляющей.
Таблица 8-1 специфицирует значение индикации IntraPredModeY[ xCb ][ yCb ] режима внутрикадрового прогнозирования и ассоциированные названия.
Таблица 8-1. Спецификация режима внутрикадрового прогнозирования и ассоциированные названия
Примечание: Режимы внутрикадрового прогнозирования INTRA_LT_CCLM, INTRA_L_CCLM и INTRA_T_CCLM применимы только к цветностным составляющим.
Параметр IntraPredModeY[ xCb ][ yCb ] определяют посредством следующих упорядоченных этапов:
1. Соседние позиции ( xNbA, yNbA ) и ( xNbB, yNbB ) устанавливают равными ( xCb − 1, yCb + cbHeight − 1 ) и ( xCb + cbWidth − 1, yCb − 1 ), соответственно.
2. Для X, заменяемого на A или B, переменные candIntraPredModeX определяют следующим образом:
- Процедуру определения доступности для блока, как это специфицировано в статье 6.4.X, [Ред. (BB): Процедура проверки доступности соседних блоков еще должна быть определена] привлекают с позиции ( xCurr, yCurr ), установленной равной ( xCb, yCb ), и соседнюю позицию ( xNbY, yNbY ) устанавливают равной ( xNbX, yNbX ) в качестве входных данных, а выходные данные назначают переменной availableX.
- Режим-кандидат внутрикадрового прогнозирования candIntraPredModeX определяют следующим образом:
- Если одно или несколько заданных условий являются истинными, параметр candIntraPredModeX устанавливают равным INTRA_PLANAR.
- Переменная availableX является равной FALSE (ЛОЖНО).
- Параметр CuPredMode[ xNbX ][ yNbX ] не равен MODE_INTRA.
- pcm_flag[ xNbX ][ yNbX ] равно 1.
- X равно B и yCb − 1 меньше ( ( yCb. >>. CtbLog2SizeY ). <<. CtbLog2SizeY ).
- В противном случае, параметр candIntraPredModeX установлен равным IntraPredModeY[ xNbX ][ yNbX ].
3. Переменные ispDefaultMode1 и ispDefaultMode2 определяют следующим образом:
- Если IntraSubPartitionsSplitType равно ISP_HOR_SPLIT, параметр ispDefaultMode1 устанавливают равным INTRA_ANGULAR18 и параметр ispDefaultMode2 устанавливают равным INTRA_ANGULAR5.
- В противном случае, параметр ispDefaultMode1 устанавливают равным INTRA_ANGULAR50 и параметр ispDefaultMode2 устанавливают равным INTRA_ANGULAR63.
4. Параметр candModeList[ x ] при x = 0..5 определяют следующим образом:
…
Вариант #2
Если сосед слева доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (2, 2); В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:

Вариант #3
Если сосед слева доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (3, 1); В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #4
Если сосед сверху доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (2, 2); В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #5
Если сосед сверху доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (3, 1); В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #6
Если соседи слева и сверху доступны и кодированы в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (2, 2); В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #7
Если соседи слева и сверху доступны и кодированы в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (3, 1); В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #8
Если сосед слева или сверху доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (2, 2); В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #9
Если сосед слева или сверху доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (3, 1); В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #10
значения (wIntra, wInter) устанавливают равными (2, 2).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #11
значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #12
Если сосед слева кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа слева, в противном случае, если сосед слева доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (3, 1). В противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #13
Если сосед слева кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа слева, в противном случае, если сосед слева доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (2, 2); в противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #14
Если сосед сверху кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа сверху; в противном случае, если сосед сверху доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (3, 1); в противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #15
Если сосед сверху кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа сверху; в противном случае, если сосед сверху доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (2, 2); в противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #16
Если сосед слева или/и сверху кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter). для первого соседа (слева->сверху), кодированного в комбинированном режиме прогнозирования CIIP; в противном случае, если сосед слева или/и сверху доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (3, 1); в противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #17
Если сосед слева или/и сверху кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для первого соседа (слева->сверху), кодированного в комбинированном режиме прогнозирования CIIP; в противном случае, если сосед слева или/и сверху доступен и кодирован в режиме внутрикадрового прогнозирования, значения (wIntra, wInter) устанавливают равными (2, 2); в противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #18
Если сосед слева кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа слева; в противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #19
Если сосед слева кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа слева; в противном случае, значения (wIntra, wInter) устанавливают равными (2, 2).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #20
Если сосед сверху кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа сверху; в противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #21
Если сосед сверху кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для соседа сверху; в противном случае, значения (wIntra, wInter) устанавливают равными (2, 2).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #22
Если сосед слева или/и сверху кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для первого соседа (слева->сверху), кодированного в комбинированном режиме прогнозирования CIIP; в противном случае, значения (wIntra, wInter) устанавливают равными (1, 3).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #23
Если сосед слева или/и сверху кодирован в комбинированном режиме прогнозирования CIIP, значения (wIntra, wInter) для текущего блока устанавливают равными значениям (wIntra, wInter) для первого соседа (слева->сверху), кодированного в комбинированном режиме прогнозирования CIIP; в противном случае, значения (wIntra, wInter) устанавливают равными (2, 2).
Комбинированное прогнозирование CIIP осуществляется следующим образом:
Вариант #24
8.5.6 Процедура кодирования для блоков, кодированных в режиме межкадрового прогнозирования
8.5.6.1 Общие положения
Эту процедуру привлекают при декодировании единицы кодирования, которая кодирована в режиме межкадрового прогнозирования.
Когда флаг ciip_flag[ xCb ][ yCb ] равен 1, массив predSamples прогнозируемых отсчетов модифицирует следующим образом:
- Если параметр cIdx равен 0, применяется следующее:
- Общую процедуру внутрикадрового прогнозирования отсчетов, как она специфицирована в статье 8.4.5.2.5, привлекают с позиции ( xTbCmp, yTbCmp ), установленной равной ( xCb, yCb ), при режиме внутрикадрового прогнозирования predModeIntra, установленном равным IntraPredModeY[ xCb ][ yCb ], и в качестве входных данных используют ширину nTbW и высоту nTbH блока преобразования, установленные равными ширине cbWidth и высоте cbHeight, ширину nCbW и высоту nCbH блока кодирования, установленные равными ширине cbWidth и высоте cbHeight, и переменную cIdx, а выходными данными является массив predSamplesIntraL размером (cbWidth)x(cbHeight).
- Процедуру прогнозирования взвешенных отсчетов для комбинированного прогнозирования в режиме объединения и внутрикадрового прогнозирования, как это специфицировано в статье 8.5.6.7, привлекают с позиции ( xTbCmp, yTbCmp ), установленной равной ( xCb, yCb ), и используют в качестве входных данных ширину cbWidth блока кодирования, высоту cbHeight блока кодирования, массивы predSamplesInter и predSamplesIntra отсчетов, установленные равными массивам predSamples и predSamplesIntraL, соответственно, режим внутрикадрового прогнозирования predModeIntra, установленный равным IntraPredModeY[ xCb ][ yCb ], и индекс cIdx цветовой составляющей, а выходными данными является массив predSamples размером (cbWidth)x(cbHeight).
…
8.5.6.7 Процедура прогнозирования взвешенных отсчетов для комбинированноо режима объединения и внутрикадрового прогнозирования
Входными данными для этой процедуры являются:
- позиция ( xCb, yCb ) яркостной составляющей, специфицирующая верхний левый отсчет текущего блока кодирования яркостной составляющей относительно верхнего левого отсчета текущего изображения,
- ширина cbWidth текущего блока кодирования,
- высмота cbHeight текущего блока кодирования,
- два массива predSamplesInter и predSamplesIntra размером (cbWidth)x(cbHeight),
- переменная cIdx, специфицирующая индекс цветовой составляющей.
Выходными данными этой процедуры является массив predSamplesComb размером (cbWidth)x(cbHeight) значений прогнозируемых отсчетов.
Переменную bitDepth определяют следующим образом:
- Если параметр cIdx равен 0, переменную bitDepth устанавливают равной BitDepthY.
- В противном случае, переменную bitDepth устанавливают равной BitDepthC.
Переменную scallFact определяют следующим образом:
scallFact = ( cIdx = = 0 ) ? 0 : 1. (8-838)
Соседнюю позицию ( xNbA, yNbA ) и ( xNbB, yNbB ) яркостной составляющей устанавливают равной ( xCb − 1, yCb − 1 + ( cbHeight << scallFact ) ) и. xCb − 1. + (cbWidth << scallFact ), yCb − 1 ), соответственно.
Для X замененного на A или B, the variables availableX and isIntraCodedNeighbourX определяют следующим образом:
- Процедуру определения доступности соседнего блока, как это специфицировано в статье 6.4.4, привлекают с позиции ( xCurr, yCurr ), установленной равной ( xCb, yCb ), в качестве входных данных используют соседнюю позицию ( xNbY, yNbY ), установленную равной ( xNbX, yNbX ), параметр checkPredModeY, установленный равным FALSE (ЛОЖНО), и параметр cIdx, установленный равным 0, а выходными данными является параметр availableX.
- Переменную isIntraCodedNeighbourX определяют следующим образом:
- Если параметр availableX равен TRUE (ИСТИННО) и параметр CuPredMode[ 0 ][ xNbX ][ yNbX ] равен MODE_INTRA и параметр BdpcmFlag[ xNbX ][ yNbX ] равен 0, параметр isIntraCodedNeighbourX установлен равным TRUE (ИСТИННО).
- В противном случае, isIntraCodedNeighbourX устанавливают равным FALSE (ЛОЖНО).
Весовой коэффициент w определяют следующим образом:
- Если параметры isIntraCodedNeighbourA и isIntraCodedNeighbourB оба равны TRUE (ИСТИННО), весовой коэффициент w установлен равным 3.
- В противном случае, если параметры isIntraCodedNeighbourA и isIntraCodedNeighbourB оба равны FALSE (ЛОЖНО), весовой коэффициент w установлен равным 1.
- В противном случае, весовой коэффициент w установлен равным 2.
Когда параметр cIdx равен 0 и флаг slice_lmcs_enabled_flag равен 1, параметр predSamplesInter[ x ][ y ] при x = 0..cbWidth − 1 и y = 0..cbHeight − 1 модифицируют следующим образом:
На фиг. 18 представлена блок-схема устройства 1800 для обработки видео. Устройство 1800 может быть использовано для реализации одного или нескольких описываемых здесь способов. Это устройство 1800 может представлять собой смартфон, планшетный компьютер, обычный компьютер, приемник Интернет вещей (Internet of Things (IoT)) и т.д. Устройство 1800 может содержать один или несколько процессоров 1802, одно или несколько запоминающих устройств 1804 и аппаратуру 1806 для обработки видео. Процессор (ы) 1802 может быть конфигурирован для реализации одного или нескольких способов, описываемых в настоящем документе. Запоминающее устройство (устройства) 1804 может быть использовано для сохранения данных и кода, применяемых для реализации способов и технологий, описываемых здесь. Аппаратура 1806 для обработки видео может быть использована для реализации, в аппаратной схеме, некоторых технологий, описываемых в настоящем документе.
На фиг. 20 представлена логическая схема способа 2000 обработки видео. Этот способ 2000 содержит определение (2005) режима кодирования первого видеоблока, ограничение (2010) одного или нескольких флагов рабочим состоянием на основе определения режима кодирования первого видеоблока, это рабочее состояние является «ложным» (false) или «истинным» (true), и осуществление (2015) дальнейшей обработки второго видеоблока в соответствии с рабочим состоянием одного или нескольких флагов, где первый видеоблок является соседним видеоблоком или опорным видеоблоком относительно второго видеоблока.
На фиг. 21 представлена логическая схема способа 2100 обработки видео. Этот способ 2100 содержит определение (2105), что попарное прогнозирование или комбинированное двунаправленное прогнозирование используются в отношении первого видеоблока, определение (2110) рабочего состояния комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) на основе определения, что используется попарное прогнозирование или комбинированное двунаправленное прогнозирование, где это рабочее состояние является активизированным или неактивизированным, и осуществление (2115) дальнейшей обработки первого видеоблока в соответствии с рабочим состоянием комбинированного режима прогнозирования CIIP.
На фиг. 23 представлена логическая схема способа 2300 обработки видео. Этот способ 2300 содержит определение (2305), в процессе преобразования первого блока данных видео и представления этого первого блока в форме потока битов данных, одного или нескольких режимов кодирования для одного или нескольких вторых блоков; определение (2310), на основе одного или нескольких режимов кодирования одного или нескольких вторых блоков, ограничения режима кодирования для первого блока; осуществление (2315), по меньшей мере путем применения указанного ограничения режима кодирования для первого блока, указанного преобразования; где совокупность одного или нескольких вторых блоков содержит по меньшей мере одно – смежный блок, несмежный блок и/или опорный блок относительно указанного первого блока.
На фиг. 24 представлена логическая схема способа 2400 обработки видео. Этот способ 2400 содержит осуществление (2405) преобразования между текущим блоком из данных видео и представлением этого текущего блока в форме потока битов данных путем использования по меньшей мере одного – комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), рассеивающей фильтрации, двусторонней фильтрации, фильтрации в преобразованной области или другого типа пост-реконструкционной фильтрации, отличного от рассеивающей фильтрации, двусторонней фильтрации и фильтрации в преобразованной области, где реконструированные соседние отсчеты текущего блока, используемые по меньшей мере в одном – комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), режиме рассеивающей фильтрации, режиме двусторонней фильтрации, режиме фильтрации в преобразованной области или режиме пост-реконструкционной фильтрации другого типа, заменяют аппроксимированными отсчетами, генерируемыми из соответствующих отсчетов из совокупности реконструированных соседних отсчетов в одном или нескольких опорных изображениях.
На фиг. 25 представлена логическая схема способа 2500 обработки видео. Этот способ 2500 содержит сохранение (2505) флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) и/или режима внутрикадрового прогнозирования из комбинированного режима CIIP с информацией о движении в таблице прогнозирования вектора движения на основе предыстории (HMVP); и осуществление, по меньшей мере на основе таблицы прогнозирования HMVP, преобразования между текущим блоком данных видео и представлением этого текущего блока в форме потока битов данных.
На фиг. 26 представлена логическая схема способа 2600 обработки видео. Этот способ 2600 содержит определение (2605), в процессе преобразования между текущим блоком из данных видео и представлением этого текущего блока в форме потока битов данных, режима прогнозирования для этого текущего блока; определение (2610) применимости комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), обозначающей, что этот режим прогнозирования CIIP активизирован для текущего блока, в ответ на определение, что текущий блок кодируют в режиме усовершенствованного прогнозирования вектора движения (AMVP) или в режиме объединения; и осуществление (2615) преобразования, на основе применимости режима комбинированного прогнозирования. CIIP.
На фиг. 27 представлена логическая схема способа 2700 обработки видео. Этот способ 2700 содержит определение (2705), в процессе преобразования между текущим блоком из данных видео и представлением этого текущего блока в форме потока битов данных, типа выбранного объединяемого кандидата для текущего блока; определение (2710), применимости комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего блока в соответствии с типом выбранного объединяемого кандидата, где текущий блок кодируют в режиме объединения.
На фиг. 28 представлена логическая схема способа 2800 обработки видео. Этот способ 2800 содержит кодирование (2805), в процессе преобразования между текущим видеоблоком из данных видео и представлением этого текущего видеоблока в форме потока битов данных, флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего видеоблока посредством кодирования на основе контекстной модели без ссылки на флаг режима прогнозирования CIIP одного или нескольких соседних видеоблоков относительно текущего видеоблока; и осуществление указанного преобразования (2810), по меньшей мере посредством применения флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего блока.
На фиг. 29 представлена логическая схема способа 2900 обработки видео. Этот способ 2900 содержит кодирование (2905), в процессе преобразования между текущим видеоблоком из данных видео и представлением этого текущего видеоблока в форме потока битов данных, флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего видеоблока посредством обходного кодирования; и осуществление преобразования (2910), по меньшей мере посредством применения флага комбинированного режим кодирования с внутрикадровым и межкадровым прогнозированием (CIIP).
На фиг. 30 представлена логическая схема способа 3000 обработки видео. Этот способ 3000 содержит определение (3005), режима внутрикадрового прогнозирования для первого видеоблока видео в соответствии с некоторым правилом, где это правило содержит пропуск, в процессе определения режима внутрикадрового прогнозирования для первого видеоблока, проверки флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для одного или нескольких соседних видеоблоков относительно первого видеоблока; и осуществление (3010), на основе по меньшей мере найденного режима внутрикадрового прогнозирования, преобразования между первым видеоблоком и представлением этого первого видеоблока в форме потока битов данных.
На фиг. 31 представлена логическая схема способа 3100 обработки видео. Этот способ 3100 содержит определение (3105), в процессе преобразования между текущим видеоблоком видео, кодированным в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), и представлением этого текущего видеоблока в форме потока битов данных, пары весовых коэффициентов, содержащей первый весовой коэффициент для первого результата прогнозирования текущего видеоблока и второй весовой коэффициент для второго результата прогнозирования текущего видеоблока, где первый результат прогнозирования генерируют в режиме внутрикадрового прогнозирования, и второй результат прогнозирования генерируют в режиме межкадрового прогнозирования; и определение (3110) результата прогнозирования для текущего блока на основе взвешенной суммы первого результата прогнозирования и второго результата прогнозирования.
В соответствии со способами 2000 и 2100, некоторые примеры комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием и их использование были описаны Разделе 4 настоящего документа. Например, как описано в Разделе 4, видеоблоки могут быть обработаны в соответствии с комбинированным режимом кодирования с внутрикадровым и межкадровым прогнозированием.
В соответствии со способами 2000 и 2100, видеоблок может быть кодирован с преобразованием в поток битов данных видео, в котором эффективность использования битов может быть достигнута с применением правила генерации потока битов данных, относящегося к комбинированному режиму кодирования с внутрикадровым и межкадровым прогнозированием.
Согласно этим способам совокупность одного или нескольких флагов может содержать флаг комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), флаг локальной компенсации освещенности (LIC), флаг рассеивающей фильтрации, флаг двусторонней фильтрации, флаг фильтрации преобразованной области или флаг какого-либо другого типа пост-реконструкционной фильтрации.
Эти способы могут содержать ситуацию, в которой указанная совокупность одного или нескольких флагов содержит первый флаг, относящийся к первой операции, этот первый флаг определен как ложный и тогда первая операция не применяется.
Способы могут содержать ситуацию, когда передают сигнализацию о том, что первую операцию следует пропустить.
Способы могут содержать ситуацию, когда передают сигнализацию о том, что использование первой операции ограничено быть ложным в потоке битов данных соответствия.
Способы могут содержать ситуацию, когда первый видеоблок находится в соседней строке или столбце относительно второго видеоблока.
Способы могут содержать ситуацию, когда указанная соседняя строка является строкой сверху или строкой сверху справа.
Способы могут содержать ситуацию, когда указанный соседний столбец представляет собой столбец слева, столбец снизу слева или угловой столбец сверху слева.
Способы могут содержать ситуацию, когда может представлять собой режим внутрикадрового прогнозирования, комбинированный режим прогнозирования CIIP или режим с использованием текущего изображения в качестве опоры (CPR).
Способы могут содержать определение позиции второго видеоблока, и при этом ограничение одного или нескольких флагов состоянием «ложно» также основано на определении позиции второго видеоблока.
Способы могут содержать ситуацию, когда указанная позиция находится сверху от текущей единицы дерева кодирования (CTU), а находящийся сверху относительно второго видеоблока соседний блок располагается в другой единице CTU.
Способы могут содержать ситуацию, когда указанная позиция находится на левой стороне от текущей единицы дерева кодирования (CTU), а находящийся слева относительно второго видеоблока соседний блок располагается в другой единице CTU.
Способы могут содержать ситуацию, когда совокупность одного или нескольких флагов содержит флаг комбинированного режима прогнозирования CIIP или флаг режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP, а данные относительно этих одного или нескольких флагов сохранены вместе с информацией о движении в таблице прогнозирования вектора движения на основе предыстории (HMVP).
Способы могут содержать сравнение информации о движении для двух кандидатов, и при этом флаг комбинированного режима прогнозирования CIIP или флаг режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP не используются при сравнении информации о движении.
Способы могут содержать сравнение информации о движении для двух кандидатов, и при этом флаг комбинированного режима прогнозирования CIIP или флаг режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP используются при сравнении информации о движении.
Способы могут содержать определение, что объединяемый кандидат исходит из одной из входных позиций прогнозирования HMVP; и копирование флага комбинированного режима прогнозирования CIIP из этой входной позиции объединяемому кандидату.
Способы могут содержать определение, что объединяемый кандидат исходит из одной из входных позиций прогнозирования HMVP; и копирование флага комбинированного режима прогнозирования CIIP и индикации режима внутрикадрового прогнозирования CIIP из этой входной позиции объединяемому кандидату.
Способы могут содержать ситуацию, когда какой-либо флаг из указанной совокупности одного или нескольких флагов относится к комбинированному режиму прогнозирования CIIP, и этот режим прогнозирования CIIP осуществляется для усовершенствованного прогнозирования вектора движения (AMVP).
Способы могут содержать ситуацию, когда флаг комбинированного режима прогнозирования CIIP и флаг режима внутрикадрового прогнозирования передают в виде сигнализации в режиме прогнозирования AMVP.
Способы могут содержать ситуацию, когда флаг комбинированного режима прогнозирования CIIP унаследован в режиме объединения или в режиме расширения UMVE, этот флаг режима прогнозирования CIIP содержит рабочее состояние «истинно», больше одного режима внутрикадрового прогнозирования допускаются в режиме прогнозирования CIIP, и передают сигнализацию об одном из режимов внутрикадрового прогнозирования на основе этих одного или нескольких режимов внутрикадрового прогнозирования допустимых в режиме прогнозирования CIIP.
Способы могут содержать ситуацию, когда флаг комбинированного режима прогнозирования CIIP и индикация режима внутрикадрового прогнозирования для соседних или несмежных видеоблоков в режиме объединения или режиме расширения UMVE унаследованы вторым видеоблоком.
Способы могут содержать ситуацию, когда комбинированное прогнозирование CIIP не активизировано для режима пропуска.
Способы могут содержать сравнение информации относительно двух кандидатов, и при этом флаг комбинированного режима прогнозирования CIIP или флаг режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP не используются при сравнении информации.
Способы могут содержать сравнение информации относительно двух кандидатов, и при этом флаг комбинированного режима прогнозирования CIIP или флаг режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP используются при сравнении информации.
Способы могут содержать ситуацию, когда один или несколько кандидатов, участвующих в попарном прогнозировании или комбинированном двунаправленном прогнозировании, принимают комбинированное прогнозирование CIIP и когда рабочее состояние активизировано.
Способы могут содержать ситуацию, когда режим внутрикадрового прогнозирования одного из двух кандидатов является унаследованным.
Способы могут содержать ситуацию, в виде сигнализации сообщают режим внутрикадрового прогнозирования.
Способы могут содержать ситуацию, когда два кандидата участвуют в попарном прогнозировании или комбинированном двунаправленном прогнозировании.
Способы могут содержать ситуацию, когда реконструированные отсчеты, используемые при комбинированном прогнозировании CIIP, в рассеивающем фильтре, двустороннем фильтре, фильтре преобразованной области или пост-реконструкционных фильтрах других типов заменены отсчетами из опорных изображений.
Способы могут содержать ситуацию, когда второй видеоблок подвергают двунаправленному прогнозированию, и соседние отсчеты двух опорных блоков усредняют для генерации окончательных соседних отсчетов.
Способы могут содержать ситуацию, когда второй видеоблок подвергают двунаправленному прогнозированию, и соседние отсчеты двух опорных блоков используют в качестве окончательных соседних отсчетов.
Способы могут содержать ситуацию, когда второй видеоблок подвергают двунаправленному прогнозированию, и для получения второго видеоблока применяют взвешенное усреднение соседних отсчетов двух опорных блоков для генерации окончательных соседних отсчетов на основе обобщенного двунаправленного прогнозирования (GBI) с неравными весовыми коэффициентами, либо компенсацию LIC с взвешенным прогнозированием.
Способы могут содержать ситуацию, когда отсчеты в опорных изображениях идентифицируют посредством информации о движении для второго видеоблока.
Способы могут содержать ситуацию, когда отсчеты в опорных изображениях идентифицируют посредством информации о движении для второго видеоблока.
Способы могут содержать ситуацию, когда вектор движения округляют с целочисленной точностью и используют для идентификации отсчетов.
Способы могут содержать ситуацию, когда отсчеты располагаются в опорных изображениях, идентифицируемых векторами движения с точностью до целых элементов изображения.
Способы могут содержать определение характеристик второго видеоблока, совокупность этих характеристик содержит одно или более из следующего – размер блока, тип среза, тип изображения, тип плитки или информацию о движении, и при этом ограничение рабочего состояния производится на основе такого определения характеристик.
Способы могут содержать ситуацию, когда сигнализацию об этих способах передают в наборе параметров последовательности (SPS), наборе параметров видео (VPS), наборе параметров изображения (PPS), заголовке последовательности, заголовке изображения, заголовке среза, заголовке группы плиток, плитке или группе единиц CTU.
Приведенный ниже список технических решений далее предлагает варианты и вариации статей, перечисленных в предыдущем разделе (например, статей 11 – 16).
40. Способ обработки видео, содержащий: осуществление преобразования между видеоблоком видео и кодированным представлением этого видеоблока с использованием комбинированного режима внутрикадрового и межкадрового прогнозирования, в котором указанное кодированное представление соответствует взвешенному усреднению результатов внутрикадрового и межкадрового прогнозирования для видеоблока с использованием пары весовых коэффициентов из группы пар весовых коэффициентов, куда входят меньше трех пар.
41. Способ согласно решению 40, отличающийся тем, что указанная группа пар весовых коэффициентов соответствует двум парам.
42. Способ согласно какому-либо из решений 40 – 41, отличающийся тем, что пары весовых коэффициентов определяют на основе одного соседнего блока.
43. Способ согласно какому-либо из решений 40 – 41, отличающийся тем, что пары весовых коэффициентов определяют на основе нескольких соседних блоков.
44. Способ согласно решению 40, отличающийся тем, что группа пар весовых коэффициентов содержит точно одну пару.
45. Способ согласно решению 44, отличающийся тем, что указанная одна пара представляет собой одно из (1,3) или (2, 2) или (1,7) или (2, 6) или (3, 5) или (4, 4).
46. Способ обработки видео, содержащий: осуществление преобразования между видеоблоком видео и кодированным представлением этого видеоблока с использованием комбинированного режима внутрикадрового и межкадрового прогнозирования, в котором это кодированное представление соответствует взвешенному среднему результатов внутрикадрового и межкадрового прогнозирования видеоблока с использованием пары весовых коэффициентов из группы пар весовых коэффициентов, определяемой на основе информации о кодировании для одного или нескольких соседних блоков.
47. Способ согласно решению 46, отличающийся тем, что группу пар весовых коэффициентов определяют на основе точно одного соседнего блока.
48. Способ согласно решению 46, отличающийся тем, что группу пар весовых коэффициентов определяют на основе двух или более соседних блоков.
49. Способ согласно какому-либо из решений 40 – 48, отличающийся тем, что процедура преобразования содержит кодирование видео для генерации кодированного представления.
50. Способ согласно какому-либо из решений 40 – 48, отличающийся тем, что процедура преобразования содержит декодирование кодированного представления для генерации видео.
Разнообразные другие варианты и дополнительные признаки этих способов могут быть описаны с использованием следующего постатейного перечисления.
1. Способ обработки видео, содержащий:
определение, в процессе преобразования между первым блоком данных видео и представлением этого первого блока в форме потока битов данных, одного или нескольких режимов кодирования для одного или нескольких вторых блоков;
определение, на основе указанных одного или нескольких режимов кодирования для одного или нескольких вторых блоков, ограничения режима кодирования для первого блока; и
осуществление преобразования, по меньшей мере путем применения указанного ограничения режима кодирования для первого блока;
где совокупность одного или нескольких вторых блоков содержит по меньшей мере одно из следующего – смежный блок, несмежный блок и/или опорный блок для первого блока.
2. Способ согласно статье 1, отличающийся тем, что процедура определения ограничения режима кодирования для первого блока содержит:
определение, на основе одного или нескольких режимов кодирования для одного или нескольких вторых блоков, одного или нескольких флагов, соответствующих указанным одному или нескольким режимам кодирования первого блока, соответственно.
3. Способ согласно статье 2, отличающийся тем, что совокупность указанных одного или нескольких режимов кодирования содержит:
комбинированный режим кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), режим с локальной компенсацией освещенности (LIC), режим рассеивающей фильтрации, режим двусторонней фильтрации, режим фильтрации в преобразованной области или режим пост-реконструкционной фильтрации, отличный от. режима рассеивающей фильтрации, режима двусторонней фильтрации и режима фильтрации в преобразованной области.
4. Способ согласно какой-либо из статей 2 – 3, отличающийся тем, что указанное ограничение режима кодирования для первого блока содержит:
первый режим кодирования из совокупности одного или нескольких режимов кодирования для первого блока не активизирован, когда определено, что первый флаг, соответствующий этому первому режиму кодирования, является ложным.
5. Способ согласно какой-либо из статей 2 – 4, отличающийся тем, что указанное ограничение режима кодирования для первого блока содержит:
информацию, обозначающую, активизирован ли второй режим кодирования из указанной совокупности одного или нескольких режимов кодирования для первого блока, не передают в виде сигнализации, когда определено, что второй флаг, соответствующий этому второму режиму кодирования, является ложным.
6. Способ согласно какой-либо из статей 2 – 5, отличающийся тем, что указанное ограничение режима кодирования для первого блока содержит:
информацию, обозначающую, активизирован ли третий режим кодирования из указанной совокупности одного или нескольких режимов кодирования для первого блока, передают в виде сигнализации и ограничивают, чтобы она была ложной, в потоке битов данных соответствия, когда определено, что третий флаг, соответствующий этому третьему режиму кодирования, является ложным.
7. Способ согласно какой-либо из статей 1 – 6, дополнительно содержащий:
определение, следует ли применить указанное ограничение режима кодирования для первого блока.
8. Способ согласно статье 7, отличающийся тем, что процедура определения, следует ли применить указанное ограничение режима кодирования для первого блока, содержит:
определение, следует ли применить указанное ограничение режима кодирования для первого блока, в соответствии с режимами кодирования для соседних строк или столбцов относительно первого блока.
9. Способ согласно статье 7, отличающийся тем, что процедура определения, следует ли применить указанное ограничение режима кодирования для первого блока, содержит:
определение, следует ли применить указанное ограничение режима кодирования для первого блока, в соответствии по меньшей мере с N отсчетами в соседних строках или в соседних столбцах первого блока, которые не кодированы в четвертом режиме, и N≥1.
10. Способ согласно статье 8 или 9, отличающийся тем, что указанная соседняя строка представляет собой строку сверху и/или строку сверху справа относительно первого блока.
11. Способ согласно какой-либо из статей 8 – 10, отличающийся тем, что указанный соседний столбец представляет собой столбец слева, столбец снизу слева и угловой столбец сверху слева относительно первого блока.
12. Способ согласно какой-либо из статей 7 – 11, отличающийся тем, что процедура определения, следует ли применить указанное ограничение режима кодирования для первого блока, содержит:
определение, что указанное ограничение режима кодирования для первого блока следует применить, когда какой-либо соседний несмежный блок кодируют в четвертом режиме.
13. Способ согласно какой-либо из статей 7 – 11, отличающийся тем, что процедура определения, следует ли применить указанное ограничение режима кодирования для первого блока, содержит:
определение, что указанное ограничение режима кодирования для первого блока следует применить, когда все соседние несмежные блоки кодируют в четвертом режиме.
14. Способ согласно какой-либо из статей 7 – 11, отличающийся тем, что процедура определения, следует ли применить указанное ограничение режима кодирования для первого блока, содержит:
определение, что указанное ограничение режима кодирования для первого блока не следует применять, когда по меньшей мере M соседних несмежных блоков не кодируют в четвертом режиме, и M представляет собой заданное первое пороговое значение.
15. Способ согласно какой-либо из статей 9 – 14, отличающийся тем, что совокупность четвертых режимов содержит по меньшей мере один из режимов – режим внутрикадрового прогнозирования, комбинированный режим кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) и режим с использованием опорного изображения в качестве опоры (CPR).
16. Способ согласно какой-либо из статей 7 – 14, отличающийся тем, что процедура определения, следует ли применить указанное ограничение режима кодирования для первого блока, содержит:
определение, следует ли применить указанное ограничение режима кодирования для первого блока, в соответствии с позицией первого блока.
17. Способ согласно статье 16, отличающийся тем, что процедура определения, следует ли применить указанное ограничение режима кодирования для первого блока в соответствии с позицией этого первого блока, содержит:
определение, что указанное ограничение режима кодирования для первого блока не следует применять, когда указанная позиция находится сверху от текущей единицы дерева кодирования (CTU), а соседний блок сверху и первый блок принадлежат разным единицам CTU.
18. Способ согласно статье 16, отличающийся тем, что процедура определения, следует ли применить указанное ограничение режима кодирования для первого блока в соответствии с позицией этого первого блока, содержит:
определение, что указанное ограничение режима кодирования для первого блока не следует применять, когда указанная позиция находится слева от текущей единицы дерева кодирования (CTU), а соседний блок слева и первый блок принадлежат разным единицам CTU.
19. Способ согласно какой-либо из статей 1 – 18, дополнительно содержащий:
определение характеристики текущего блока; и
определение, что следует применить указанное ограничение режима кодирования для текущего блока, когда указанная характеристика текущего блока удовлетворяет заданному условию.
20. Способ согласно какой-либо из статей 1 – 18, дополнительно содержащий:
определение характеристик текущего блока и/или ранее кодированных блоков; и
определение, следует ли применить указанное ограничение режима кодирования для текущего блока, в соответствии с характеристиками текущего блока и/или ранее кодированных блоков
21. Способ обработки видео, содержащий:
осуществление преобразования между текущим блоком данных видео и представлением этого текущего блока в форме потока битов данных с использованием по меньшей мере одного из режимов – комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), режима рассеивающей фильтрации, режима двусторонней фильтрации, режима фильтрации в преобразованной области или другого типа режима пост-реконструкционной фильтрации, отличной от рассеивающей фильтрации, двусторонней фильтрации и фильтрации в преобразованной области,
где реконструированные соседние отсчеты для соседнего блока, используемые меньшей мере в одном из режимов – комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), режиме рассеивающей фильтрации, режиме двусторонней фильтрации, режиме фильтрации в преобразованной области или режиме пост-реконструкционной фильтрации другого типа, заменяют аппроксимированными отсчетами, генерируемыми на основе соответствующих отсчетов из совокупности реконструированных соседних отсчетов в одном или нескольких опорных изображениях.
22. Способ согласно статье 21, отличающийся тем, что соседние отсчеты из двух опорных блоков относительно текущего блока усредняют для генерации аппроксимированных отсчетов, когда текущий блок подвергают двунаправленному прогнозированию.
23. Способ согласно статье 21, отличающийся тем, что соседние отсчеты одного опорного блока относительно текущего блока используются в качестве аппроксимированных отсчетов, когда текущий блок подвергнут двунаправленному прогнозированию или однонаправленному прогнозированию.
24. Способ согласно статье 21, отличающийся тем, что соседние отсчеты из двух опорных блоков для текущего блока подвергают взвешенному усреднению для генерации аппроксимированных отсчетов, когда текущий блок подвергнут двунаправленному прогнозированию, и к этому текущему блоку применяют по меньшей мере одно – обобщенное двунаправленное прогнозирование (GBI) с неравными весовыми коэффициентами, взвешенное прогнозирование и/или локальную компенсацию освещенности (LIC).
25. Способ согласно статье 22 – 24, отличающийся тем, что соседние отсчеты из опорных блоков относительно текущего блока идентифицированы посредством информации о движении текущего блока.
26. Способ согласно статье 22 – 24, отличающийся тем, что соседние отсчеты из опорных блоков относительно текущего блока идентифицированы посредством модифицированной информации о движении для текущего блока.
27. Способ согласно статье 24, отличающийся тем, что модифицированная информация о движении текущего блока представляет собой модифицированный вектор движения, округленный до целочисленной точности.
28. Способ согласно статье 21, отличающийся тем, что соседние отсчеты из опорных блоков относительно текущего блока идентифицированы посредством векторов движения с точностью до целых элементов изображения.
29. Способ согласно статье 28, отличающийся тем, что векторы движения для реконструированных соседних отсчетов округлены до целочисленной точности, чтобы идентифицировать соответствующие отсчеты.
30. Способ согласно какой-либо из статей 21 – 29, отличающийся тем, что реконструированные соседние отсчеты для текущих блоков заменяют аппроксимированными отсчетами только тогда, когда текущий блок кодируют с точностью до целых пикселей.
31. Способ согласно какой-либо из статей 21 – 30, отличающийся тем, что реконструированные соседние отсчеты для текущих блоков заменяют аппроксимированными отсчетами только яркостной составляющей или только цветностной составляющей.
32. Способ согласно какой-либо из статей 19 – 31, дополнительно содержащий:
определение характеристики текущего блока; и
определение, что следует заменить реконструированные соседние отсчеты для текущих блоков аппроксимированными отсчетами, когда указанная характеристика текущего блока удовлетворяет заданному условию.
33. Способ согласно статье 19 или 32, отличающийся тем, что указанная характеристика текущего блока содержит по меньшей мере одно – размер блока, тип среза, тип изображения, тип плитки и информацию о движении.
34. Способ согласно статье 33, отличающийся тем, что указанное заданное условие состоит в том, что текущий блок содержит отсчеты не меньше заданного второго порогового значения.
35. Способ согласно статье 33, отличающийся тем, что указанное заданное условие состоит в том, что ширина и высота текущего блока больше заданного третьего порогового значения.
36. Способ согласно статье 33, отличающийся тем, что указанное заданное условие состоит в том, что ширина и высота текущего блока меньше заданного четвертого порогового значения.
37. Способ согласно статье 33, отличающийся тем, что указанное заданное условие состоит в том, что ширина текущего блока меньше заданного пятого порогового значения и/или высота текущего блока меньше заданного шестого порогового значения.
38. Способ согласно статье 33, отличающийся тем, что указанное заданное условие состоит в том, что ширина текущего блока больше заданного седьмого порогового значения и/или высота текущего блока больше заданного восьмого порогового значения.
39. Способ согласно статье 38, отличающийся тем, что
передают в виде сигнализации информацию, указывающую, следует ли применить ограничение режима кодирования для текущего блока и/или заменить реконструированные соседние отсчеты аппроксимированными отсчетами в наборе параметров последовательности (SPS), наборе параметров видео (VPS), наборе параметров изображение (PPS), в заголовке последовательности, заголовке изображения, заголовке среза, заголовке группы плиток, плитке или группе единиц CTU.
40. Способ согласно какой-либо из статей 21 – 39, дополнительно содержащий:
определение характеристик текущего блока и/или ранее кодированных блоков; и
определение, следует ли заменить реконструированные соседние отсчеты аппроксимированными отсчетами в соответствии с указанными характеристиками текущего блока или ранее кодированных блоков.
41. Способ согласно статье 20 или 40, отличающийся тем, что совокупность указанных характеристик текущего блока и/или ранее кодированных блоков содержит по меньшей мере одно из следующего – размер блока, единицу обработки данных видео (VPDU), тип изображения, флаг проверки малой задержки, информацию кодирования для текущего блока и/или ранее кодированных блоков.
42. Способ согласно статье 41, отличающийся тем, что информация кодирования для текущего блока и/или ранее кодированных блоков указывает опорные изображения, однонаправленное прогнозирование или двунаправленное прогнозирование.
43. Устройство для обработки видео, содержащее процессор, конфигурированный для осуществления способа согласно какой-либо из статей 1 – 42.
44. Устройство согласно статье 43, отличающееся тем, что это устройство является кодирующим устройством для видео.
45. Устройство согласно статье 43, отличающееся тем, что это устройство является декодирующим устройством для видео.
46. Читаемые компьютером носители для записи информации, на которых записан код, содержащий программу, в соответствии с этой программой процессор осуществляет способ согласно какой-либо из статей 1 – 42.
Разнообразные другие варианты и дополнительные признаки этих способов могут быть описаны с использованием следующего постатейного перечисления.
1. Способ обработки видео, содержащий:
сохранение флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) и/или режима внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP с информацией о движении в таблице прогнозирования вектора движения на основе предыстории (HMVP); и
осуществление, по меньшей мере на основе таблицы прогнозирования HMVP, преобразования между текущим блоком данных видео и представлением этого текущего блока в форме потока битов данных.
2. Способ согласно статье 1, дополнительно содержащий:
сравнение информации о движении для двух кандидатов,
где флаг комбинированного режима прогнозирования CIIP и/или режим внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP не используются в сравнении информации о движении для двух кандидатов.
3. Способ согласно статье 1, дополнительно содержащий:
сравнение информации о движении для двух кандидатов,
где флаг комбинированного режима прогнозирования CIIP и/или режим внутрикадрового прогнозирования из комбинированного режима прогнозирования CIIP используются в сравнении информации о движении для двух кандидатов.
4. Способ согласно какой-либо из статей 1 – 3, отличающийся тем, что процедура содержит:
когда объединяемый кандидат исходит из одной из входных позиций таблицы прогнозирования HMVP; копирование флага комбинированного режима прогнозирования CIIP из этой входной позиции объединяемому кандидату.
5. Способ согласно какой-либо из статей 1 – 3, отличающийся тем, что процедура содержит:
когда объединяемый кандидат исходит из одной из входных позиций таблицы прогнозирования HMVP; копирование флага комбинированного режима прогнозирования CIIP и индикации режима внутрикадрового прогнозирования CIIP из этой входной позиции объединяемому кандидату.
6. Способ обработки видео, содержащий:
определение, в процессе преобразования между текущим блоком данных видео и представлением этого текущего блока в форме потока битов данных, режима прогнозирования для этого текущего блока;
определение применимости комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), обозначающей, что этот режим прогнозирования CIIP активизирован для текущего блока, в ответ на определение, что текущий блок кодируют в режиме усовершенствованного прогнозирования вектора движения (AMVP) или в режиме объединения; и
осуществление преобразования, на основе применимости режима комбинированного прогнозирования. CIIP.
7. Способ по статье 6, отличающийся тем, что флаг комбинированного режима прогнозирования CIIP и/или индикацию режима внутрикадрового прогнозирования CIIP передают в виде сигнализации, когда текущий блок кодирован в режиме прогнозирования AMVP.
8. Способ по статье 6 или 7, отличающийся тем, что флаг комбинированного режима прогнозирования CIIP и/или индикацию режима внутрикадрового прогнозирования CIIP для смежных соседних блоков и/или несмежных соседних блоков наследуют в режиме объединения и/или в режиме объединения с разностями векторов движения (MMVD) для текущего блока.
9. Способ согласно какой-либо из статей 6 – 8, отличающийся тем, что флаг комбинированного режима прогнозирования CIIP и/или индикацию режима внутрикадрового прогнозирования CIIP для режима объединения, не являющегося режимом пропуска, и/или режима MMVD, не являющегося режимом пропуска, передают в виде сигнализации, а флаг комбинированного режима прогнозирования CIIP и/или индикацию режима внутрикадрового прогнозирования CIIP для смежных соседних блоков и/или несмежных соседних блоков. наследуют в режиме объединения с пропуском и/или в режиме MMVD с пропуском.
10. Способ согласно какой-либо из статей 6 – 8,. отличающийся тем, что флаг комбинированного режима прогнозирования CIIP и/или индикацию режима внутрикадрового прогнозирования CIIP режима объединения с пропуском и/или режима MMVD с пропуском передают в виде сигнализации, а флаг комбинированного режима прогнозирования CIIP и/или индикацию режима внутрикадрового прогнозирования CIIP для смежных соседних блоков и/или несмежных соседних блоков наследуют в режиме объединения, не являющемся режимом пропуска, и/или в режиме MMVD, не являющемся режимом пропуска.
11. Способ согласно какой-либо из статей 6 – 10, отличающийся тем, что флаг комбинированного режима прогнозирования CIIP наследуют в режиме объединения и/или в режиме MMVD с пропуском.
12. Способ по статье 11, отличающийся тем, что индикацию режима внутрикадрового прогнозирования передают в виде сигнализации, когда флаг комбинированного режима прогнозирования CIIP является истинным и в режиме прогнозирования CIIP допускается больше одного режима внутрикадрового прогнозирования.
13. Способ согласно какой-либо из статей 6 – 12, отличающийся тем, что флаг комбинированного режима прогнозирования CIIP и/или индикацию режима внутрикадрового прогнозирования CIIP для смежных соседних блоков и/или несмежных соседних блоков, кодируемых в режиме объединения и/или в режиме MMVD, наследует текущий блок.
14. Способ согласно какой-либо из статей 6 – 13, дополнительно содержащий:
отмену активизации комбинированного режима прогнозирования CIIP для режима пропуска.
15. Способ согласно какой-либо из статей 6 – 13, дополнительно содержащий:
сравнение информации о двух объединяемых кандидатов,
где флаг комбинированного режима прогнозирования CIIP и/или the индикацию режима внутрикадрового прогнозирования CIIP не используют при сравнении информации о двух объединяемых кандидатов.
16. Способ согласно какой-либо из статей 6 – 13, дополнительно содержащий:
сравнение информации о двух объединяемых кандидатах,
где флаг комбинированного режима прогнозирования CIIP и/или the индикацию режима внутрикадрового прогнозирования CIIP используют при сравнении информации о двух объединяемых кандидатах.
17. Способ обработки видео, содержащий:
определение, в процессе преобразования между текущим блоком данных видео и представлением этого текущего блока в форме потока битов данных, типа выбранного объединяемого кандидата для текущего блока, и
определение, применимости комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего блока в соответствии с выбранным объединяемым кандидатом,
где текущий блок кодируют в режиме объединения.
18. Способ согласно статье 17, отличающийся тем, что режим прогнозирования CIIP не активизируют, когда выбранный объединяемый кандидат для текущего блока представляет собой по меньшей мере одно из – попарно объединяемый кандидат, объединяемый кандидат с двунаправленным прогнозированием, объединяемый кандидат с нулевым движением, или виртуальный или искусственный объединяемый кандидат.
19. Способ согласно статье 17 или 18, отличающийся тем, что когда один кандидат, участвующий в попарно объединяемом кандидате или объединяемом кандидате с двунаправленным прогнозированием принимает комбинированный режим прогнозирования CIIP, этот режим прогнозирования CIIP активизируют для такого попарно объединяемого кандидата или объединяемого кандидата с двунаправленным прогнозированием.
20. Способ согласно статье 19, отличающийся тем, что режим внутрикадрового прогнозирования для участвующего кандидата комбинированного режима прогнозирования CIIP наследуется.
21. Способ согласно статье 19, отличающийся тем, что индикацию режима внутрикадрового прогнозирования для участвующего комбинированного режима прогнозирования CIIP сообщают в виде сигнализации для попарно объединяемого кандидата или объединяемого кандидата с двунаправленным прогнозированием.
22. Способ согласно статье 17 или 18, отличающийся тем, что когда оба кандидата, участвующие в попарно объединяемом кандидате или в объединяемом кандидате с двунаправленным прогнозированием, принимают комбинированный режим прогнозирования CIIP, этот режим прогнозирования CIIP активизируют для попарно объединяемого кандидата или объединяемого кандидата с двунаправленным прогнозированием.
23. Способ согласно статье 22, отличающийся тем, что режим внутрикадрового прогнозирования для одного из двух участвующих кандидатов является унаследованным.
24. Способ согласно статье 22, отличающийся тем, что режим внутрикадрового прогнозирования из участвующего комбинированного режима прогнозирования CIIP определяют из совокупности режимов внутрикадрового прогнозирования для двух участвующих кандидатов и используют для попарно объединяемого кандидата или объединяемого кандидата с двунаправленным прогнозированием.
25. Способ согласно статье 22, отличающийся тем, что индикацию режима внутрикадрового прогнозирования из участвующего комбинированного режима прогнозирования CIIP сообщают в виде сигнализации для попарно объединяемого кандидата или объединяемого кандидата с двунаправленным прогнозированием.
26. Устройство для обработки видео, содержащее процессор, конфигурированный для осуществления способа согласно какой-либо из статей 1 – 25.
27. Устройство согласно статье 26, отличающееся тем, что это устройство представляет собой кодирующее устройство для видео.
28. Устройство согласно статье 26, отличающееся тем, что это устройство представляет собой декодирующее устройство для видео.
29. Читаемые компьютером носители для записи информации, на которых записана программа, содержащая код, при выполнении этой программы процессор осуществляет способ согласно какой-либо из статей 1 – 25.
Разнообразные другие варианты и дополнительные признаки этих способов могут быть описаны с использованием следующего постатейного перечисления.
1. Способ обработки видео, содержащий:
кодирование, в процессе преобразования между текущим видеоблоком из данных видео и представлением этого текущего видеоблока в форме потока битов данных, флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего видеоблока с использованием способа кодирования на основе контекстной модели без учета флага комбинированного режима прогнозирования CIIP для одного или нескольких соседних видеоблоков относительно текущего видеоблока, и
осуществление преобразования, по меньшей мере путем применения флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего видеоблока.
2. Способ согласно статье 1, отличающийся тем, что при кодировании флага комбинированного режима прогнозирования CIIP для текущего видеоблока на основе контекстной модели используется фиксированный контекст.
3. Способ обработки видео, содержащий:
кодирование, в процессе преобразования между текущим видеоблоком из данных видео и представлением этого текущего видеоблока в форме потока битов данных, флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для текущего видеоблока посредством обходного кодирования, и
осуществление преобразования, по меньшей мере путем применения указанного флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP).
4. Способ согласно статье 3, отличающийся тем, что процедура кодирования флага комбинированного режима межкадрового-внутрикадрового прогнозирования (CIIP) для текущего видеоблока посредством обходного кодирования содержит кодирование флага комбинированного режима прогнозирования CIIP с равной вероятностью того, что флаг этот будет равен 0 или 1.
5. Способ согласно какой-либо из статей 1 – 4, дополнительно содержащий:
в ответ на то, что текущий видеоблок кодирован в комбинированном режиме прогнозирования CIIP, установление некоторого конкретного режима внутрикадрового прогнозирования в качестве режима внутрикадрового прогнозирования, ассоциированного с текущим видеоблоком.
6. Способ согласно статье 5, отличающийся тем, что указанный конкретный режим внутрикадрового прогнозирования является планарным режимом.
7. Способ согласно статье 5 или 6, отличающийся тем, что указанный конкретный режим внутрикадрового прогнозирования используется при определении режима внутрикадрового прогнозирования для последующих кодируемых видеоблоков.
8. Способ согласно статье 7, дополнительно содержащий:
в процессе преобразования второго видеоблока, являющегося одним из последующих кодируемых видеоблоков относительно текущего видеоблока, если текущий видеоблок является соседним видеоблоком относительно второго видеоблока, указанный конкретный режим внутрикадрового прогнозирования добавляют к списку режимов-кандидатов внутрикадрового прогнозирования для второго видеоблока.
9. Способ согласно статье 8, дополнительно содержащий:
список режимов-кандидатов внутрикадрового прогнозирования содержит список наиболее вероятных режимов-кандидатов.
10. Способ согласно какой-либо из статей 1 – 9, отличающийся тем, что в ответ на то, что текущий видеоблок кодируют в комбинированном режиме прогнозирования CIIP, не сохраняют информацию о режиме внутрикадрового прогнозирования для текущего видеоблока.
11. Способ согласно статье 10, отличающийся тем, что текущий видеоблок считается недоступным в процессе декодирования других блоков.
12. Способ согласно статье 10, отличающийся тем, что текущий видеоблок считается видеоблоком, кодируемым в режиме межкадрового прогнозирования.
13. Способ согласно статье 1 – 12, отличающийся тем, что the флаг комбинированного режима прогнозирования CIIP для текущего видеоблока не сохраняют.
14. Способ обработки видео, содержащий:
определение режима внутрикадрового прогнозирования для первого видеоблока видео в соответствии с некоторым правилом, это правило содержит:
пропуск, в ходе процедуры определения режима внутрикадрового прогнозирования для первого видеоблока, проверки флага комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием (CIIP) для одного или нескольких соседних видеоблоков относительно первого видеоблока, и
осуществление, на основе по меньшей мере найденного режима внутрикадрового прогнозирования, преобразования между первым видеоблоком и представлением этого первого видеоблока в форме потока битов данных.
15. Способ согласно статье 14, отличающийся тем, что
процедура определения режима внутрикадрового прогнозирования содержит определение наиболее вероятного режима.
16. Способ согласно статье 14 или 15, отличающийся тем, что для второго видеоблока видео, в ответ на то, что второй видеоблок кодирован в режиме межкадрового прогнозирования или в комбинированном режиме прогнозирования CIIP, для второго видеоблока устанавливают режим внутрикадрового прогнозирования по умолчанию, где второй видеоблок является соседним видеоблоком относительно первого видеоблока.
17. Способ согласно статье 16, отличающийся тем, что процедура определения режима внутрикадрового прогнозирования основана на режиме внутрикадрового прогнозирования по умолчанию для второго видеоблока;
и режим внутрикадрового прогнозирования по умолчанию является планарным режимом внутрикадрового прогнозирования.
18.. Способ согласно какой-либо из статей 14 – 17, отличающийся тем, что флаг комбинированного режима прогнозирования CIIP для одного или нескольких соседних видеоблоков не сохраняют.
19. Устройство для обработки видео, содержащее процессор, конфигурированный для осуществления способа согласно какой-либо из статей 1 – 18.
20. Устройство согласно статье 19, отличающееся тем, что это устройство представляет собой кодирующее устройство для видео.
21. Устройство согласно статье 19, отличающееся тем, что это устройство представляет собой декодирующее устройство для видео.
22. Читаемые компьютером носители для записи информации, на которых записана программа, содержащая код, при выполнении этой программы процессор осуществляет способ согласно какой-либо из статей 1 – 21.
Разнообразные другие варианты и дополнительные признаки этих способов могут быть описаны с использованием следующего постатейного перечисления.
1. Способ обработки видео, содержащий:
определение, в процессе преобразования между текущим видеоблоком, кодируемым в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), видео и представлением этого текущего видеоблока в форме потока битов данных, пары весовых коэффициентов, содержащей первый весовой коэффициент для первого результата прогнозирования для текущего видеоблока и второй весовой коэффициент для второго результата прогнозирования для текущего видеоблока, на основе одного или нескольких соседних видеоблоков относительно текущего видеоблока,
где первый результат прогнозирования генерируется режимом внутрикадрового прогнозирования, и второй результат прогнозирования генерируется режимом межкадрового прогнозирования; и
определение результат прогнозирования для текущего блока на основе взвешенной суммы первого результата прогнозирования и второго результата прогнозирования.
2.. Способ согласно статье 1, отличающийся тем, что процедура определения пары весовых коэффициентов содержит:
определение пары весовых коэффициентов в соответствии с режимом прогнозирования одного или нескольких соседних блоков относительно текущего видеоблока.
3. Способ согласно статье 1 или 2, отличающийся тем, что для соседнего видеоблока, кодируемого в комбинированном режиме прогнозирования CIIP, соседний видеоблок рассматривают в качестве блока, кодируемого в режиме межкадрового прогнозирования.
4 Способ согласно статье 1 или 2, отличающийся тем, что в случае соседнего видеоблока, кодируемого в комбинированном режиме прогнозирования CIIP, этот соседний видеоблок рассматривают в качестве блока, кодируемого в режиме внутрикадрового прогнозирования.
5. Способ согласно какой-либо из статей 1 – 4, отличающийся тем, что указанные соседние видеоблоки представляют собой по меньшей мере одно – смежный блок, несмежный блок и/или временной соседний блок, относительно соседнего видеоблока.
6. Способ согласно какой-либо одной из статей 1 – 5, отличающийся тем, что один из соседних видеоблоков представляет соседний видеоблок слева или соседний видеоблок сверху.
7. Способ согласно какой-либо одной из статей 1 – 5, отличающийся тем, что два из соседних видеоблоков представляют соседний видеоблок слева и соседний видеоблок сверху, соответственно.
8. Способ согласно статье 6 или 7, отличающийся тем, что соседний видеоблок слева покрывает позицию (xCb-1, yCb+cbHeight-1) и соседний видеоблок сверху покрывает позицию (xCb+cbWidth-1, yCb-1), и отличающийся тем, что (xCb, yCb) обозначает позицию верхнего левого отсчета текущего видеоблока, и cbWidth и cbHeight представляют собой ширину и высоту текущего видеоблока, соответственно.
9. Способ согласно статье 6 или 7, отличающийся тем, что соседний видеоблок слева покрывает позицию (xCb-1, yCb) и соседний видеоблок сверху покрывает позицию (xCb, yCb-1), и отличающийся тем, что (xCb, yCb) обозначает позицию верхнего левого отсчета текущего видеоблока.
10. Способ согласно какой-либо из статей 1 – 9, отличающийся тем, что результат комбинированного режима прогнозирования CIIP получают путем применения пары весовых коэффициентов к результату внутрикадрового прогнозирования и к результату межкадрового прогнозирования по формуле:
и где РСПР обозначает результат комбинированного режима прогнозирования CIIP, Pinter обозначает результат межкадрового прогнозирования, Pintra обозначает результат внутрикадрового прогнозирования, (wInter, wIntra) обозначает пару весовых коэффициентов, offset (сдвиг) установлен равным (1<< (N-1)) или 0, и N устанавливают равным log2(wIntra + wInter).
11. Способ согласно какой-либо из статей 1 – 10, отличающийся тем, что указанный соседний видеоблок выбирают на основе информации о кодировании для текущего блока и/или этого соседнего блока.
12. Способ согласно какой-либо из статей 1 – 11, отличающийся тем, что пару весовых коэффициентов определяют на основе информации о кодировании соседнего блока и/или соседнего блока.
13. Способ согласно статье 11 или 12, отличающийся тем, что эта информация о кодировании содержит по меньшей мере одно из: информацию о размерах блока, информацию о форме блока, флаг проверки малой задержки, информацию об опорных изображениях, информацию о движении текущего видеоблока и/или соседнего видеоблока или индикацию режимов внутрикадрового прогнозирования для соседних видеоблоков.
14. Способ согласно статье 1, отличающийся тем, что пара весовых коэффициентов зависит от цветовых составляющих текущего видеоблока.
15. Способ согласно статье 14, отличающийся тем, что пара весовых коэффициентов для главной цветовой составляющей отличается от коэффициентов для других цветовых составляющих.
16. Способ согласно статье 14, отличающийся тем, что пара весовых коэффициентов для яркостной составляющей отличаются от коэффициентов для цветностной составляющей.
17. Способ согласно какой-либо из статей 14 – 16, отличающийся тем, что для цветностной составляющей первый весовой коэффициент равен второму весовому коэффициенту.
18. Способ согласно какой-либо из статей 1 – 17, отличающийся тем, что указанная пара весовых коэффициентов представляет собой одну из двух пар-кандидатов весовых коэффициентов, включая первую пару-кандидата весовых коэффициентов и вторую пару-кандидата весовых коэффициентов.
19. Способ согласно статье 18, отличающийся тем, что указанные две пары-кандидата весовых коэффициентов представляют собой одно из {(1,3) и (3,1)}, {(1,3) и (2,2)}, {(3,1) и (2,2)}, {(3, 5) и (4, 4)}, {(5, 3) и (4, 4)}, {(1, 7) и (4, 4)} и {(7, 1) и (4, 4)}.
20. Способ согласно статье 18 или 19, отличающийся тем, что пару весовых коэффициентов определяют на основе одного соседнего видеоблока относительно текущего видео.
21. Способ согласно статье 20, отличающийся тем, что когда указанный один соседний видеоблок кодируют в режиме внутрикадрового прогнозирования, пара весовых коэффициентов представляет собой первую пару-кандидата весовых коэффициентов; и когда указанный один соседний видеоблок кодируют в режиме межкадрового прогнозирования, пара весовых коэффициентов представляет собой вторую пару-кандидата весовых коэффициентов.
22. Способ согласно статье 20 или 21, отличающийся тем, что указанный один соседний видеоблок представляет собой соседний видеоблок слева или соседний видеоблок сверху.
23. Способ согласно статье 18 или 19, отличающийся тем, что указанную пару весовых коэффициентов определяют на основе двух или более соседних видеоблоков относительно текущего видеоблока и по меньшей мере один из двух или более соседних видеоблоков удовлетворяет заданным условиям.
24. Способ согласно статье 23, отличающийся тем, что когда по меньшей мере один из двух или более соседних видеоблоков кодируют в режиме внутрикадрового прогнозирования, указанная пара весовых коэффициентов является первой парой-кандидатом весовых коэффициентов; и когда по меньшей мере один из двух или более соседних видеоблоков кодируют в режиме межкадрового прогнозирования, указанная пара весовых коэффициентов является второй парой-кандидатом весовых коэффициентов.
25. Способ согласно статье 18 или 19, отличающийся тем, указанную пару весовых коэффициентов определяют на основе двух или более соседних видеоблоков относительно текущего видеоблока и каждый из этих из двух или более соседних видеоблоков удовлетворяет заданным условиям.
26. Способ согласно статье 25, отличающийся тем, что когда все из двух или более соседних видеоблоков кодируют в режиме внутрикадрового прогнозирования, указанная пара весовых коэффициентов является первой парой-кандидатом весовых коэффициентов; и когда все из двух или более соседних видеоблоков кодируют в режиме межкадрового прогнозирования, указанная пара весовых коэффициентов является второй парой-кандидатом весовых коэффициентов.
27. Способ согласно какой-либо из статей 23 – 26, отличающийся тем, что один из двух или более соседних видеоблоков представляет собой соседний видеоблок слева, и другой из двух или более соседних видеоблоков представляет собой соседний видеоблок сверху.
28. Способ согласно какой-либо из статей 23 – 27, отличающийся тем, что первая пара-кандидат весовых коэффициентов представляет собой одно из (2, 2) и (3, 1), и вторая пара-кандидат весовых коэффициентов представляет собой (1, 3).
29. Способ согласно какой-либо из статей 23 – 28, отличающийся тем, что по меньшей мере один весовой коэффициент в первой паре-кандидате весовых коэффициентов отличается по меньшей мере от одного весового коэффициента во второй паре-кандидате весовых коэффициентов.
30. Способ согласно какой-либо из статей 23 – 29, отличающийся тем, что первая пара-кандидат весовых коэффициентов отличается от второй пары-кандидата весовых коэффициентов.
31. Способ согласно какой-либо из статей 1 – 17, отличающийся тем, что указанная пара весовых коэффициентов представляет собой точно одну пару-кандидата весовых коэффициентов.
32. Способ согласно статье 31, отличающийся тем, что указанная одна пара-кандидат весовых коэффициентов представляет собой одно из (1,3), (2,2), (1, 7), (2, 6), (3, 5) и (4, 4).
33. Способ согласно какой-либо из статей 1 – 32, отличающийся тем, что указанную пару весовых коэффициентов определяют на основе того, кодируют ли один или несколько соседних видеоблоков в режиме комбинированного прогнозирования CIIP.
34. Способ по статье 33, отличающийся тем, что указанную пару весовых коэффициентов определяют на основе пары весовых коэффициентов для ранее кодированных видеоблоков.
35. Способ согласно статье 33 или 34, отличающийся тем, что указанную пару весовых коэффициентов для текущего видеоблока определяют на основе одного соседнего видеоблока относительно текущего видеоблока.
36. Способ согласно статье 35, отличающийся тем, что когда один соседний видеоблок кодируют в комбинированном режиме прогнозирования CIIP, пару весовых коэффициентов для текущего видеоблока устанавливают равной паре весовых коэффициентов для одного соседнего видеоблока; и
когда указанный один соседний видеоблок кодируют в режиме внутрикадрового прогнозирования, указанная пара весовых коэффициентов представляет собой первую пару-кандидата весовых коэффициентов из двух пар-кандидатов весовых коэффициентов, содержащих первую пару-кандидата весовых коэффициентов и вторую пару-кандидата весовых коэффициентов;
когда указанный один соседний видеоблок кодируют в режиме межкадрового прогнозирования, указанная пара весовых коэффициентов представляет собой вторую пару-кандидата весовых коэффициентов из двух пар-кандидатов весовых коэффициентов, содержащих первую пару-кандидата весовых коэффициентов и вторую пару-кандидата весовых коэффициентов.
37. Способ согласно статье 35, отличающийся тем, что когда указанный один соседний видеоблок кодируют в комбинированном режиме прогнозирования CIIP, пару весовых коэффициентов для текущего видеоблока устанавливают равной паре весовых коэффициентов для указанного одного соседнего видеоблока; и
когда указанный один соседний видеоблок кодируют в режиме внутрикадрового прогнозирования или в режиме межкадрового прогнозирования, указанная пара весовых коэффициентов представляет собой первую пару-кандидата весовых коэффициентов из двух пар-кандидатов весовых коэффициентов, содержащих первую пару-кандидата весовых коэффициентов и вторую пару-кандидата весовых коэффициентов.
38. Способ согласно статье 33 или 34, отличающийся тем, что указанную пару весовых коэффициентов определяют на основе двух или более соседних видеоблоков относительно текущего видеоблока и по меньшей мере один из двух или более соседних видеоблоков удовлетворяет заданным условиям.
39. Способ согласно статье 38, отличающийся тем, что два или более из соседних видеоблоков проверяют в конкретном порядке проверки для идентификации, кодируют ли указанные два или более соседних видеоблоков в комбинированном режиме прогнозирования CIIP.
40. Способ согласно статье 39, отличающийся тем, что когда по меньшей мере один из указанных двух или более соседних видеоблоков кодируют в комбинированном режиме прогнозирования CIIP, пару весовых коэффициентов для текущего видеоблока устанавливают равной паре весовых коэффициентов для указанного соседнего видеоблока, который был первым идентифицирован, как кодируемый в комбинированном режиме прогнозирования CIIP при проверке в указанном конкретном порядке;
когда ни один из двух или более соседних видеоблоков не кодируют в комбинированном режиме прогнозирования CIIP, по меньшей мере один из этих двух или более соседних видеоблоков кодируют в режиме внутрикадрового прогнозирования, указанная пара весовых коэффициентов представляет собой первую пару-кандидата весовых коэффициентов из двух пар-кандидатов весовых коэффициентов, содержащих первую пару-кандидата весовых коэффициентов и вторую пару-кандидата весовых коэффициентов;
когда ни один из двух или более соседних видеоблоков не кодируют в комбинированном режиме прогнозирования CIIP, по меньшей мере один из этих двух или более соседних видеоблоков кодируют в режиме межкадрового прогнозирования, указанная пара весовых коэффициентов представляет собой вторую пару-кандидата весовых коэффициентов из двух пар-кандидатов весовых коэффициентов, содержащих первую пару-кандидата весовых коэффициентов и вторую пару-кандидата весовых коэффициентов.
41. Способ согласно статье 39, отличающийся тем, что когда по меньшей мере один из двух или более соседних видеоблоков кодируют в комбинированном режиме прогнозирования CIIP, пару весовых коэффициентов для текущего блока устанавливают равной паре весовых коэффициентов для указанного соседнего видеоблока, который был первым идентифицирован, как кодируемый в комбинированном режиме прогнозирования CIIP при проверке в указанном конкретном порядке;
когда ни один из двух или более соседних видеоблоков не кодируют в комбинированном режиме прогнозирования CIIP, указанная пара весовых коэффициентов представляет собой вторую пару-кандидата весовых коэффициентов из двух пар-кандидатов весовых коэффициентов, содержащих первую пару-кандидата весовых коэффициентов и вторую пару-кандидата весовых коэффициентов.
42. Способ согласно какой-либо из статей 36 – 41, отличающийся тем, что первая пара-кандидат весовых коэффициентов представляет собой одно из (2, 2) и (3, 1), и вторая пара-кандидат весовых коэффициентов представляет собой (1, 3).
43. Способ согласно какой-либо из статей 36 – 42, отличающийся тем, что по меньшей мере один весовой коэффициент в первой паре-кандидате весовых коэффициентов отличается по меньшей мере от одного весового коэффициента во второй паре-кандидате весовых коэффициентов.
44. Способ согласно какой-либо из статей 36 – 41, отличающийся тем, что указанная вторая пара-кандидат весовых коэффициентов представляет собой одно из (2, 2) и (1, 3).
45. Способ согласно какой-либо из статей 1 – 44, отличающийся тем, что пару весовых коэффициентов передают в виде сигнализации.
46. Способ согласно какой-либо из статей 1 – 45, отличающийся тем, что указанную пару весовых коэффициентов определяют на основе того, кодируют ли соседний видеоблок в режиме межкадрового прогнозирования.
47. Способ согласно какой-либо из статей 1 – 46, отличающийся тем, что когда соседний видеоблок не кодируют в режиме внутрикадрового прогнозирования, этот соседний видеоблок рассматривают в качестве блока, кодируемого в режиме внутрикадрового прогнозирования.
48. Способ согласно статье 47, отличающийся тем, что соседний видеоблок не кодируют по меньшей мере в одном из режимов – режиме внутрикадрового кодирования блоков (intra block copy (IBC)), комбинированном режиме прогнозирования CIIP, треугольном режиме прогнозирования (triangular prediction mode (TPM)), режиме палитры, режиме модуляции RDPCM.
49. Способ согласно статье 48, отличающийся тем, что соседний видеоблок кодируют без применения преобразования и/или квантования.
50. Способ согласно какой-либо одной из статей 1 – 46, отличающийся тем, что когда соседний видеоблок кодируют по меньшей мере в одном из режимов – режиме внутрикадрового кодирования блоков (IBC), комбинированном режиме прогнозирования CIIP, треугольном режиме прогнозирования (TPM), режиме палитры, режиме модуляции RDPCM, этот соседний видеоблок рассматривают в качестве блока, кодируемого в режиме, не являющемся режимом внутрикадрового прогнозирования.
51. Способ согласно какой-либо из статей 1 – 46, отличающийся тем, что когда соседний видеоблок кодируют в режиме внутрикадрового прогнозирования, но не кодируют в заданном режиме прогнозирования, этот соседний видеоблок рассматривают в качестве блока, кодируемого в режиме, не являющемся режимом внутрикадрового прогнозирования.
52. Способ согласно какой-либо из статей 1 – 46, отличающийся тем, что когда соседний видеоблок кодируют в режиме внутрикадрового прогнозирования на матричной основе и/или в режиме внутрикадрового прогнозирования с несколькими опорными строками, где индекс опорной строки не равен 0, и/или в режиме модуляции BDPCM, этот соседний видеоблок рассматривают в качестве блока, кодируемого в режиме, не являющемся режимом внутрикадрового прогнозирования.
53. Устройство для обработки видео, содержащее процессор, конфигурированный для осуществления способа согласно какой-либо из статей 1 – 52.
54. Устройство согласно статье 53, отличающееся тем, что это устройство представляет собой кодирующее устройство для видео.
55. Устройство согласно статье 53, отличающееся тем, что это устройство представляет собой декодирующее устройство для видео.
56. Читаемые компьютером носители для записи информации, на которых записана программа, содержащая код, при выполнении этой программы процессор осуществляет способ согласно какой-либо из статей 1 – 52.
Должно быть понятно, что описываемые технологии могут быть реализованы в кодирующих устройствах для видео или декодирующих устройствах для видео, чтобы повысить эффективность сжатия с использованием оценки движения на основе хэширования.
Описываемые здесь и другие технические решения, примеры, варианты, модули и функциональные операции, рассматриваемые в настоящем документе, могут быть реализованы в цифровой электронной схеме или компьютерном загружаемом программном обеспечении, встроенном программном обеспечении или оборудовании, включая структуры, описываемые в настоящем документе и их структурные эквиваленты, либо комбинации одного или нескольких из перечисленных объектов. Описываемые и другие варианты могут быть реализованы в виде одного или нескольких компьютерных программных продуктов, т.е. одного или нескольких модулей компьютерных программных команд, кодированных на читаемом компьютером носителе для выполнения устройством обработки данных или управления работой такого устройства. Такой читаемый компьютером носитель информации может представлять собой машиночитаемое устройство для хранения информации, машиночитаемую плату для хранения информации, запоминающее устройство, композицию объектов, реализующих машиночитаемый распространяющийся сигнал или комбинацию одного или нескольких из этих компонентов. Термин «устройство обработки данных» охватывает все – аппаратуру, устройства и машины для обработки данных, включая в качестве примеров, программируемый процессор, компьютер, либо несколько процессоров или компьютеров. Устройство может содержать, в дополнение к оборудованию, код, составляющий среду для выполнения рассматриваемой компьютерной программы, например, код, составляющий встроенное программное обеспечение процессора, стек протоколов, систему управления базой данных, операционную систему или комбинацию одного или нескольких перечисленных компонентов. Распространяющийся сигнал представляет собой искусственно генерируемый сигнал, например, генерируемый машиной электрический, оптический или электромагнитный сигнал, формируемый для кодирования информации для передачи подходящему приемному устройству.
Компьютерная программа (также известная под названиями «программа», «программное обеспечение», «программное приложение», «сценарий» или «код») может быть записана на каком-либо языке программирования, включая компилируемые или интерпретируемые языки, и может быть развернута в любой форме, включая автономную программу, программный модуль, компонент, подпрограмму или другой подобный объект, подходящий для использования в компьютерной среде. Компьютерная программа не обязательно соответствует одному файлу в компьютерной системе. Программа может быть сохранена в части файла, который сохраняет другие программы или данные, (например, один или несколько сценариев, сохраненных в документе на языке разметки) в одном файле, выделенном для рассматриваемой программы, или в нескольких скоординированных файлах (например, в файлах, сохраняющих один или несколько модулей, подпрограмм или частей кода). Компьютерная программа может быть развернута для выполнения на одном компьютере или на нескольких компьютерах, расположенных в одном месте или распределенных по нескольким пунктам и соединенных сетью связи.
Процедуры и логические схемы, рассматриваемые в настоящем описании, могут быть реализованы одним или несколькими программируемыми процессорами, выполняющими одну или несколько программ для осуществления функции посредством оперирования над входными данными и генерации выходных данных. Эти процедуры и логические схемы могут также быть осуществлены посредством и устройства могут быть реализованы в виде логических схем специального назначения, например, программируемой пользователем вентильной матрицы (FPGA (field programmable gate array)) или специализированных интегральных схем (ASIC (application specific integrated circuit)).
Процессоры, подходящие для выполнения компьютерной программы, могут представлять собой, например, микропроцессоры, как общего, так и специального назначения, и один или несколько процессоров цифрового компьютера какого-либо типа. В общем случае, процессор будет принимать команды и данные из постоянного запоминающего устройства или запоминающего устройства с произвольной выборкой, либо из запоминающих устройств обоих типов. Существенными элементами компьютера являются процессор для выполнения команд и одно или несколько запоминающих устройств для сохранения команд и данных. В общем случае, компьютер будет также содержать или быть оперативно соединен для приема и/или передачи данных с запоминающими устройствами большой емкости для хранения данных, например, магнитными дисками, магнитооптическими дисками или оптическими дисками. Однако компьютеру нет необходимости иметь такие устройства. К читаемым компьютером носителям информации для сохранения команд и данных относятся все формы энергонезависимой памяти, носителей информации и запоминающих устройств, включая в качестве примеров, полупроводниковые запоминающие устройства, например, стираемое программируемое постоянное запоминающее устройство (СППЗУ (EPROM)), электрически стираемое и программируемое постоянное запоминающее устройство (ЭСППЗУ (EEPROM)) и устройства флэш-памяти; магнитные диски, например, встроенные жесткие диски или сменные диски; магнитооптические диски; а также диски. CD ROM и DVD-ROM. Процессор и запоминающее устройство могут быть дополнены или включены в логическую схему специального назначения.
Хотя настоящий патентный документ содержит много специфических деталей, их не следует толковать в качестве каких-либо ограничений объема какого-либо нововведения или того, что может быть заявлено в качестве изобретения, а просто как описания признаков, которые могут быть специфичными для конкретных вариантов конкретных нововведений. Некоторые признаки, описываемые в настоящем патентном документе в контексте раздельных вариантов, могут быть также реализованы в виде комбинации в одном варианте. Напротив, различные признаки, описываемые в контексте одного варианта, могут быть также реализованы в нескольких вариантах по отдельности или в какой-либо подходящей субкомбинации. Более того, хотя признаки могут быть описаны выше как действующие в определенных комбинациях и даже первоначально заявлены как таковые, один или несколько признаков из заявляемой комбинации могут быть в некоторых случаях исключены из этой заявляемой комбинации, так что эта заявляемая комбинация может быть превращена в субкомбинацию или вариации такой субкомбинации.
Аналогично, тогда как операции изображены на чертежах в конкретном порядке, это не следует понимать как требование, что такие операции должны выполняться в показанном конкретном порядке или в последовательном порядке или что все показанные иллюстрации должны быть выполнены для достижения желаемых результатов. Более того, разделение различных системных компонентов, описываемых в настоящем патентном документе, не следует понимать как требование такого разделения во всех вариантах.
Здесь описаны только несколько вариантов и примеров, однако и другие варианты реализации, усовершенствования и вариации могут быть созданы на основе того, что описано и иллюстрировано в настоящем патентном документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЗАВИСИМОЕ КОДИРОВАНИЕ ИНДИКАЦИИ ИСПОЛЬЗОВАНИЯ РЕЖИМА ПАЛИТРЫ | 2020 |
|
RU2816845C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ В КРОСС-КОМПОНЕНТНОМ РЕЖИМЕ | 2020 |
|
RU2817006C2 |
| ПРОЦЕДУРА КВАНТОВАНИЯ ДЛЯ РЕЖИМА ПАЛИТРЫ | 2020 |
|
RU2803621C2 |
| СОВМЕСТНОЕ КОДИРОВАНИЕ ИНДИКАЦИИ ИСПОЛЬЗОВАНИЯ РЕЖИМА ПАЛИТРЫ | 2020 |
|
RU2810950C2 |
| ОГРАНИЧЕНИЯ ПРИМЕНИМОСТИ КРОСС-КОМПОНЕНТНОГО РЕЖИМА | 2020 |
|
RU2816350C2 |
| СПОСОБ КОНТЕКСТНО-ЗАВИСИМОГО КОДИРОВАНИЯ ДЛЯ РЕЖИМА С ПРОПУСКОМ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2817139C2 |
| СОСТАВЛЕНИЕ СПИСКА НАИБОЛЕЕ ВЕРОЯТНЫХ РЕЖИМОВ ДЛЯ МАТРИЧНОГО ВНУТРИКАДРОВОГО ПРЕДСКАЗАНИЯ | 2020 |
|
RU2815175C2 |
| ОПРЕДЕЛЕНИЕ РЕЖИМА КОДИРОВАНИЯ ЦВЕТНОСТИ НА ОСНОВЕ ВНУТРИКАДРОВОГО ПРЕДСКАЗАНИЯ НА ОСНОВЕ МАТРИЦЫ | 2020 |
|
RU2815738C2 |
| СПОСОБ УПРАВЛЕНИЯ БУФЕРОМ ДЛЯ РЕЖИМА ВНУТРИКАДРОВОГО КОПИРОВАНИЯ БЛОКОВ ПРИ КОДИРОВАНИИ ВИДЕО | 2020 |
|
RU2811022C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЖИМА КОДИРОВАНИЯ НА ОСНОВЕ ЦВЕТОВОГО ФОРМАТА | 2020 |
|
RU2816857C2 |
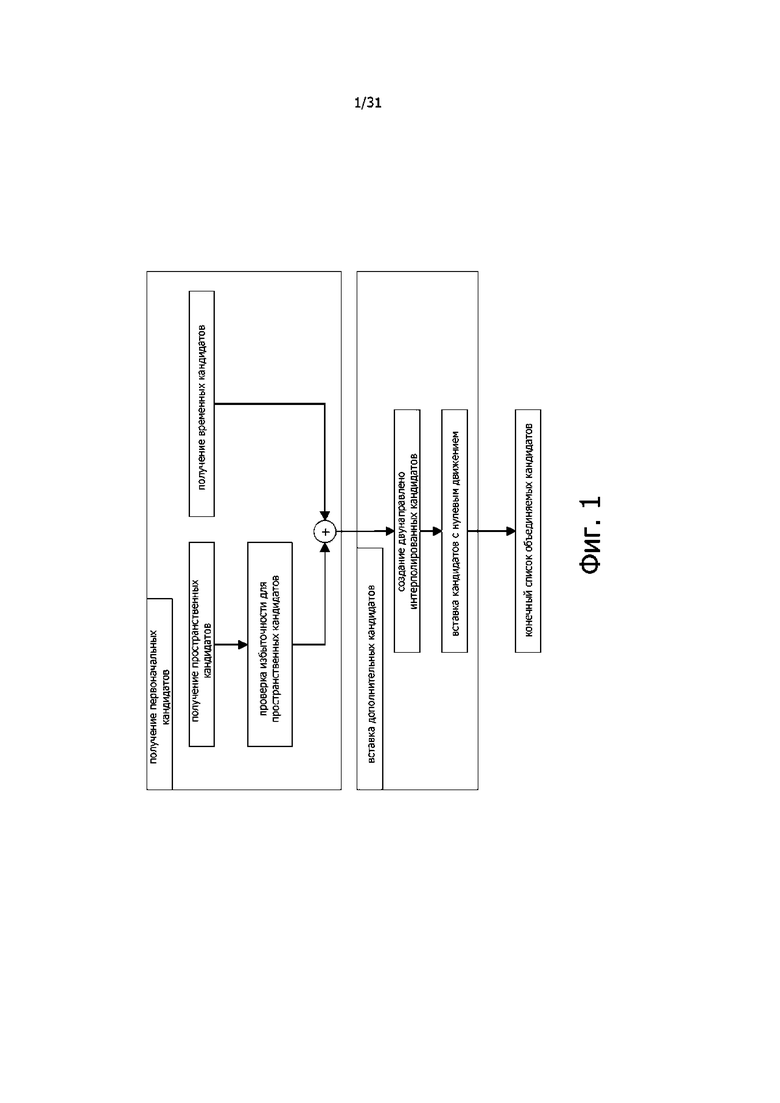
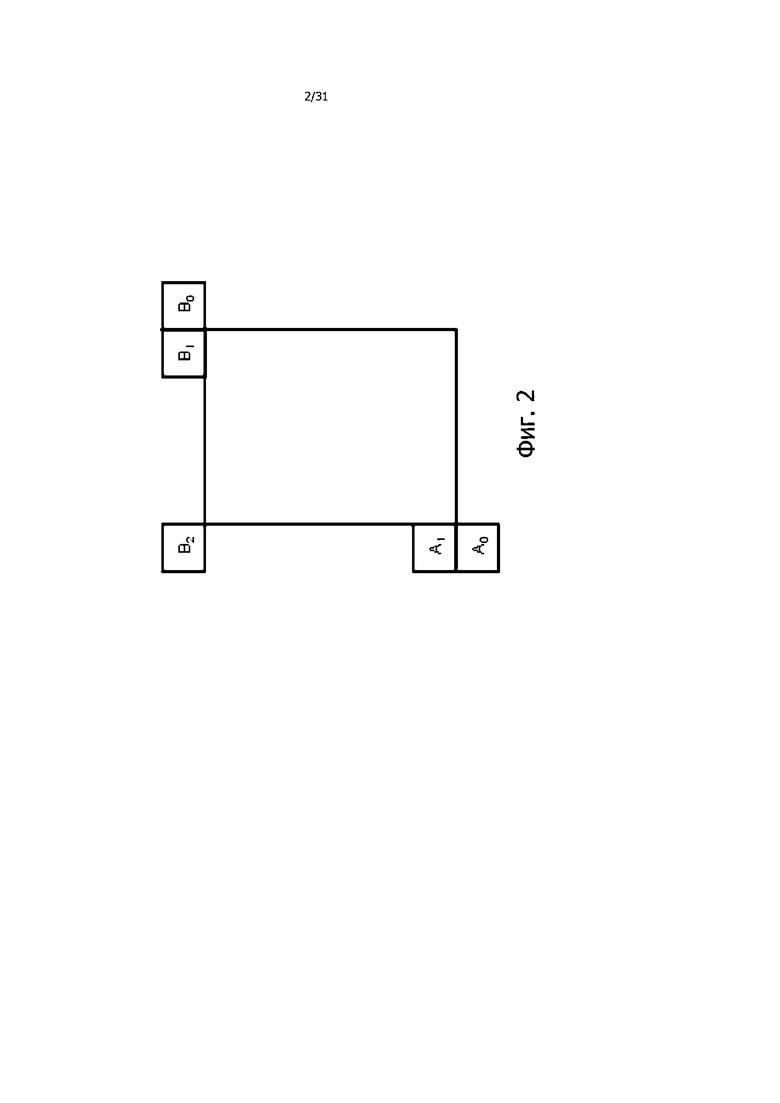
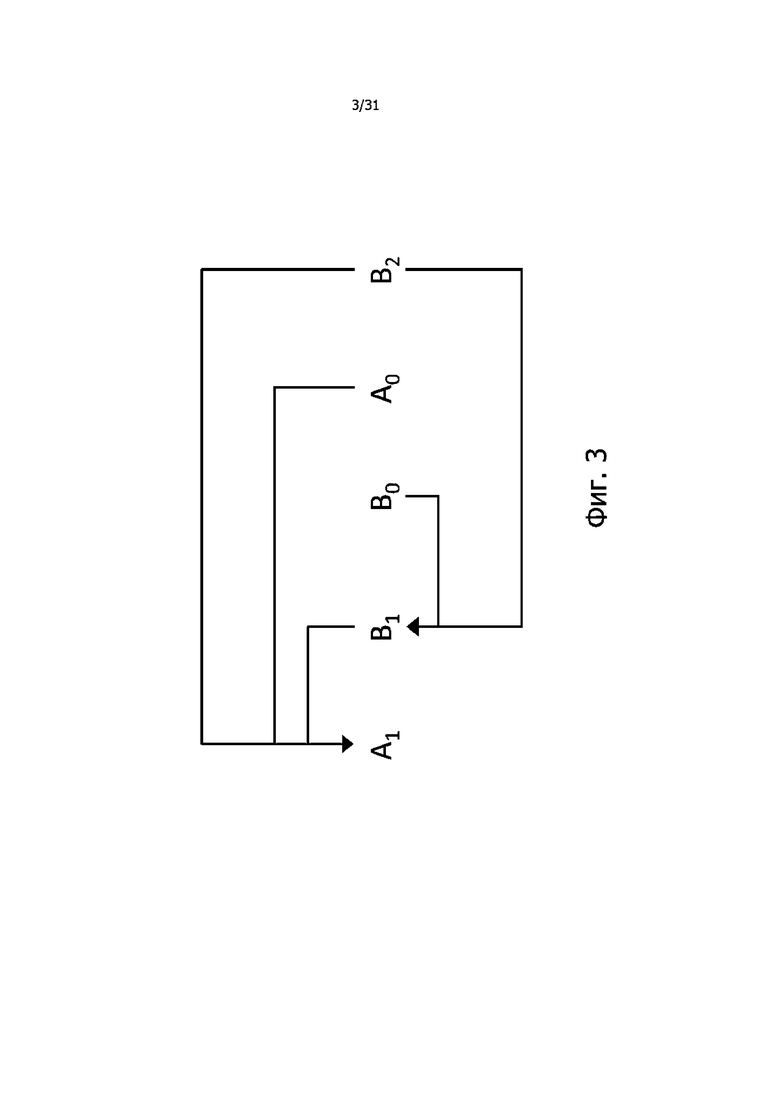
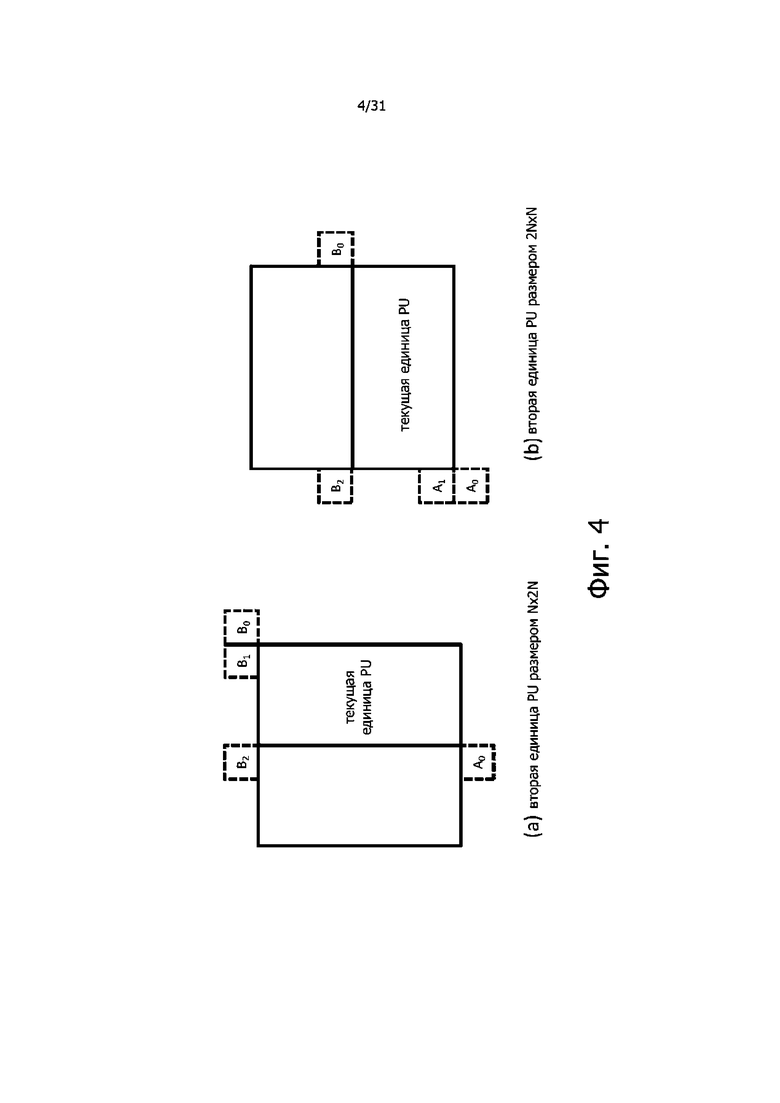
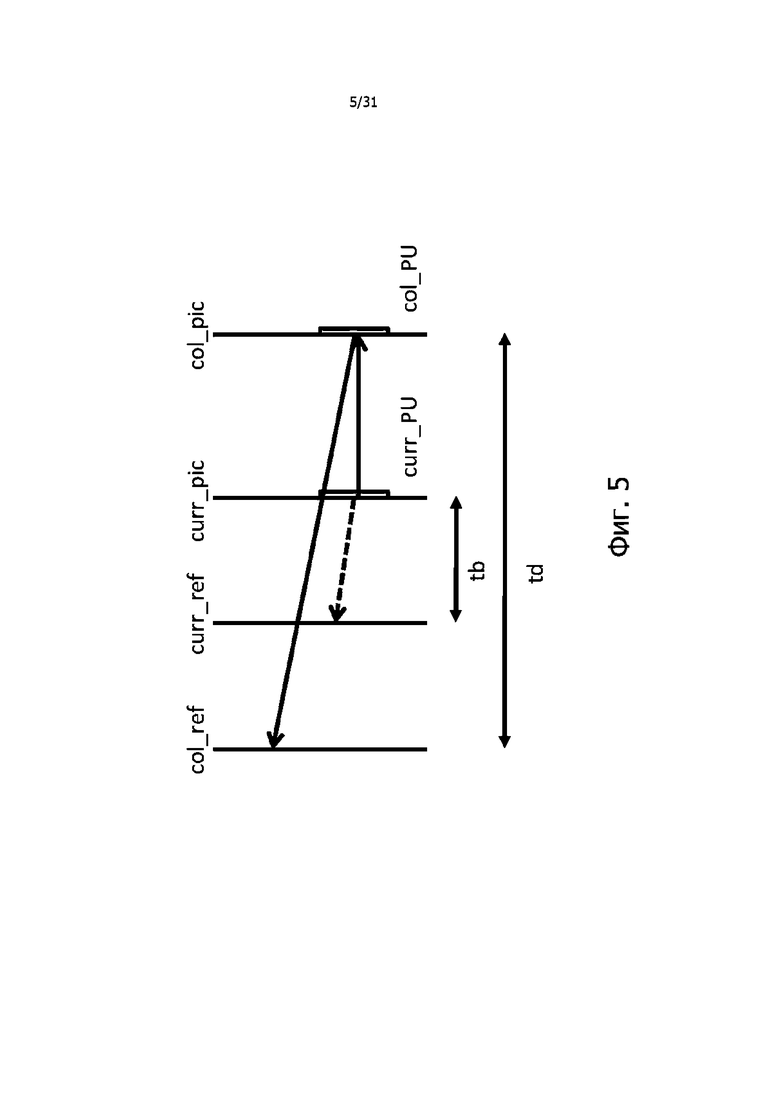
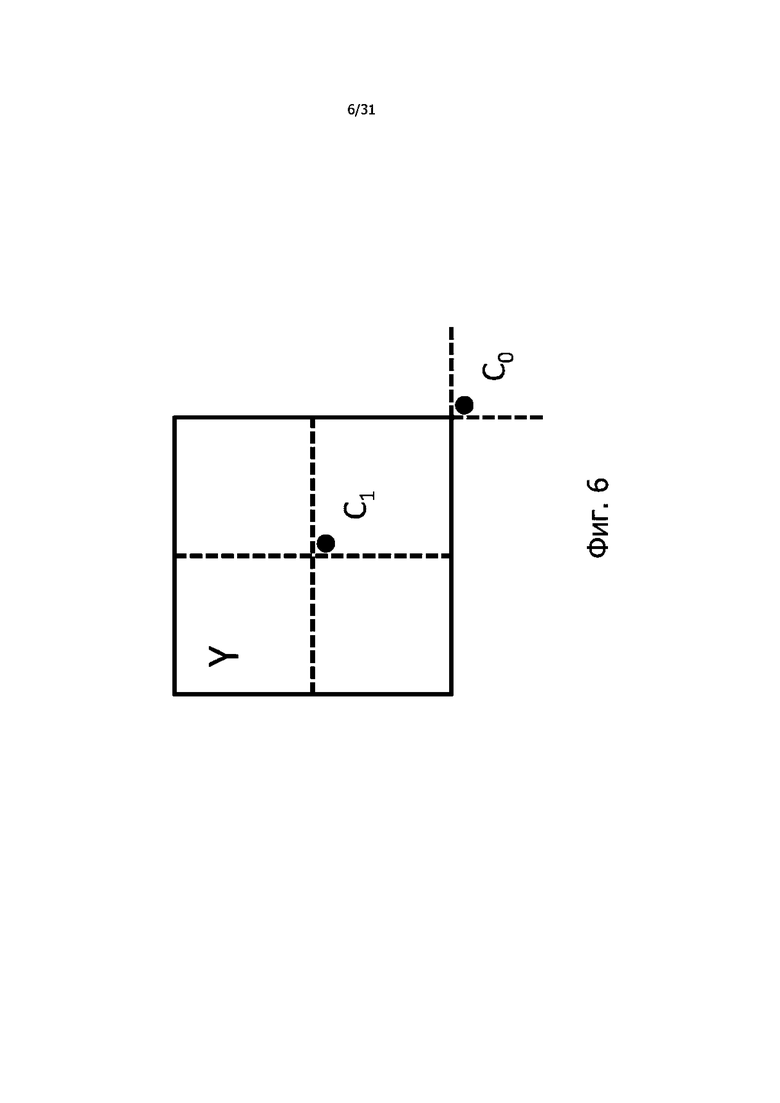
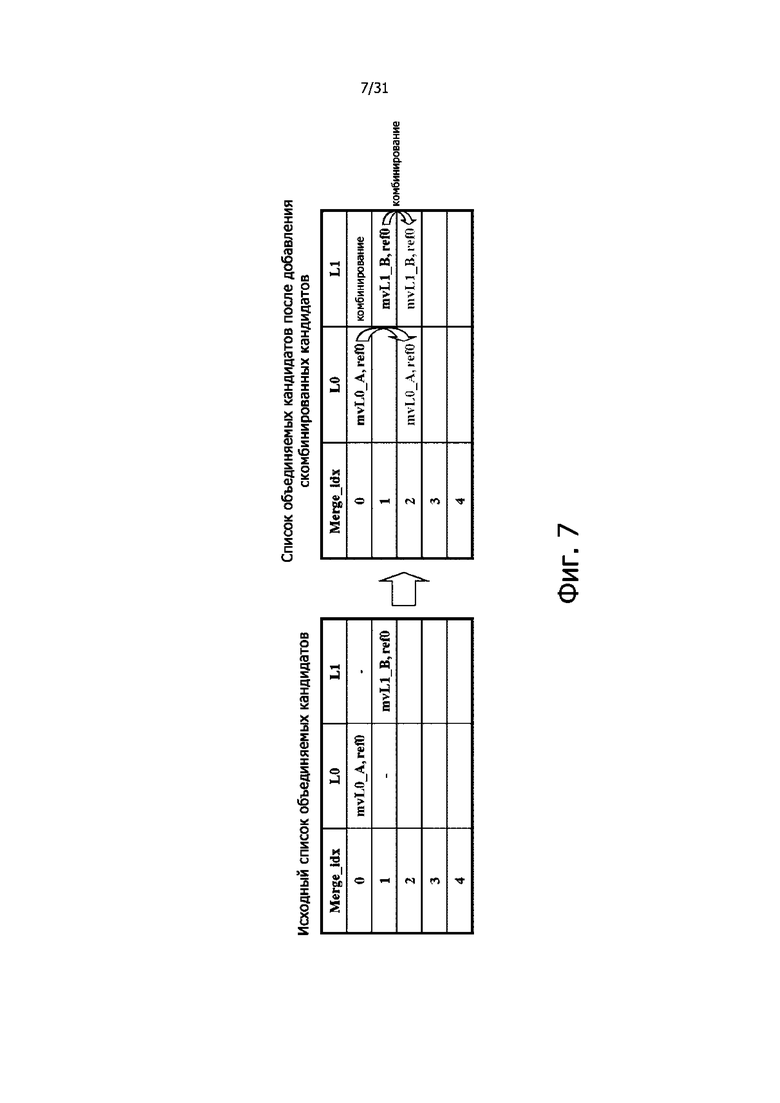
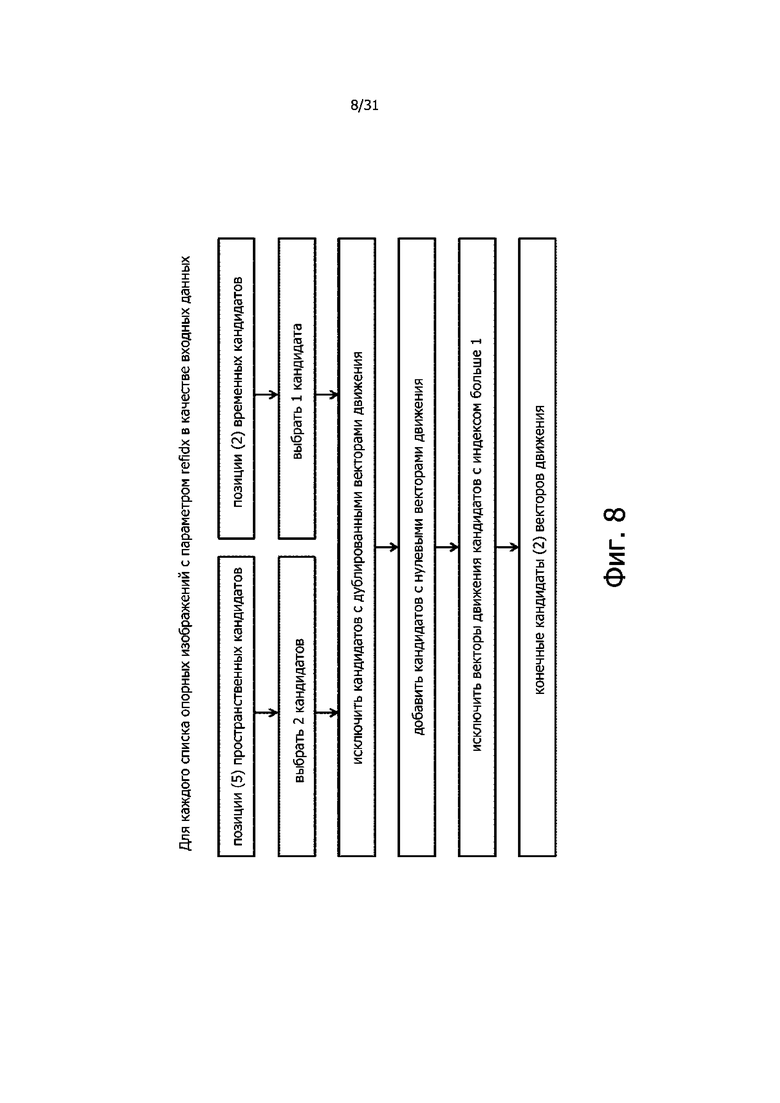
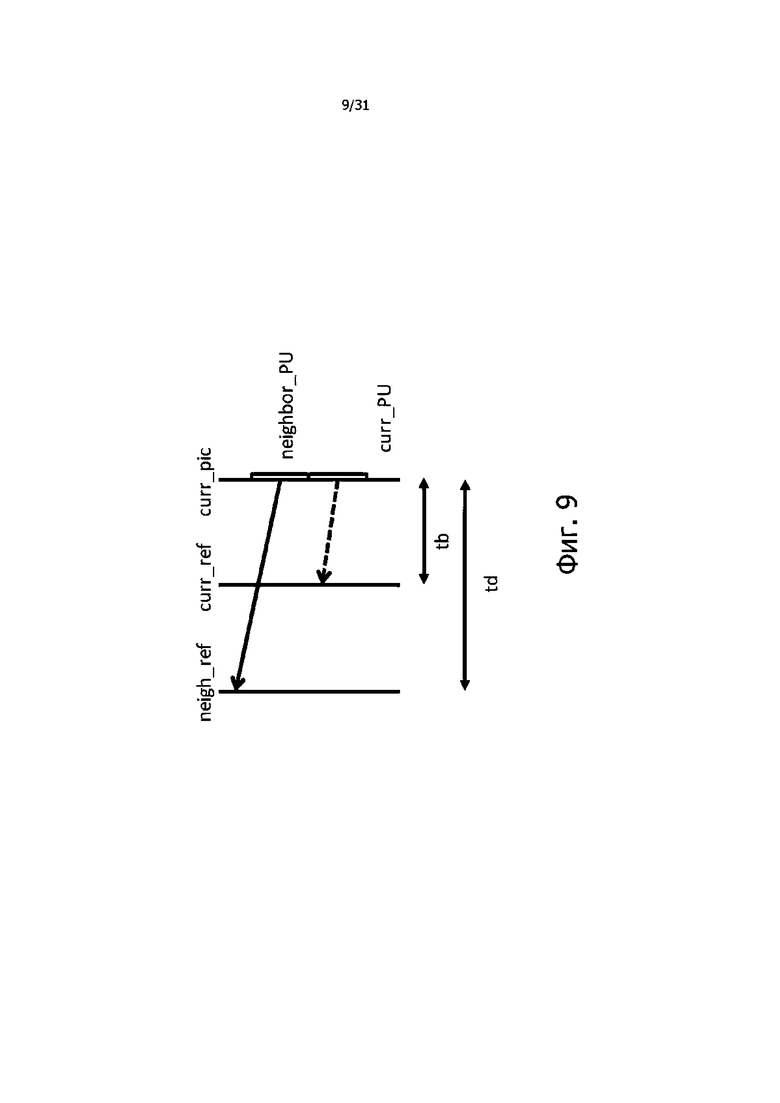
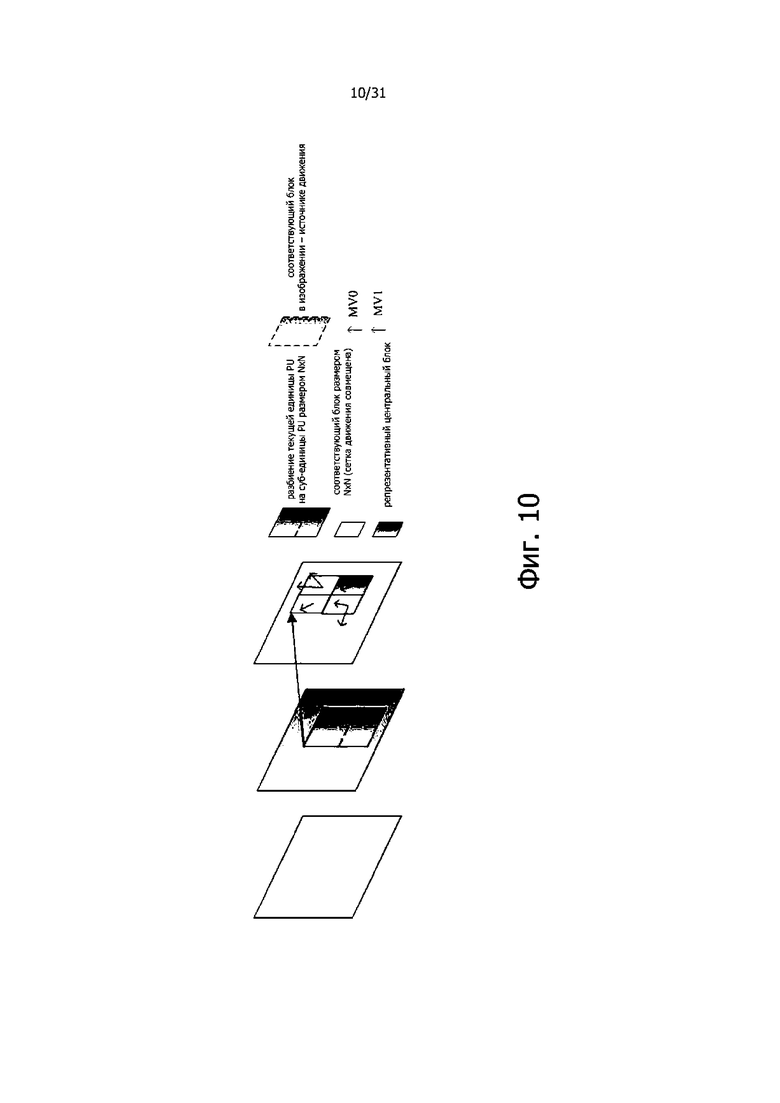
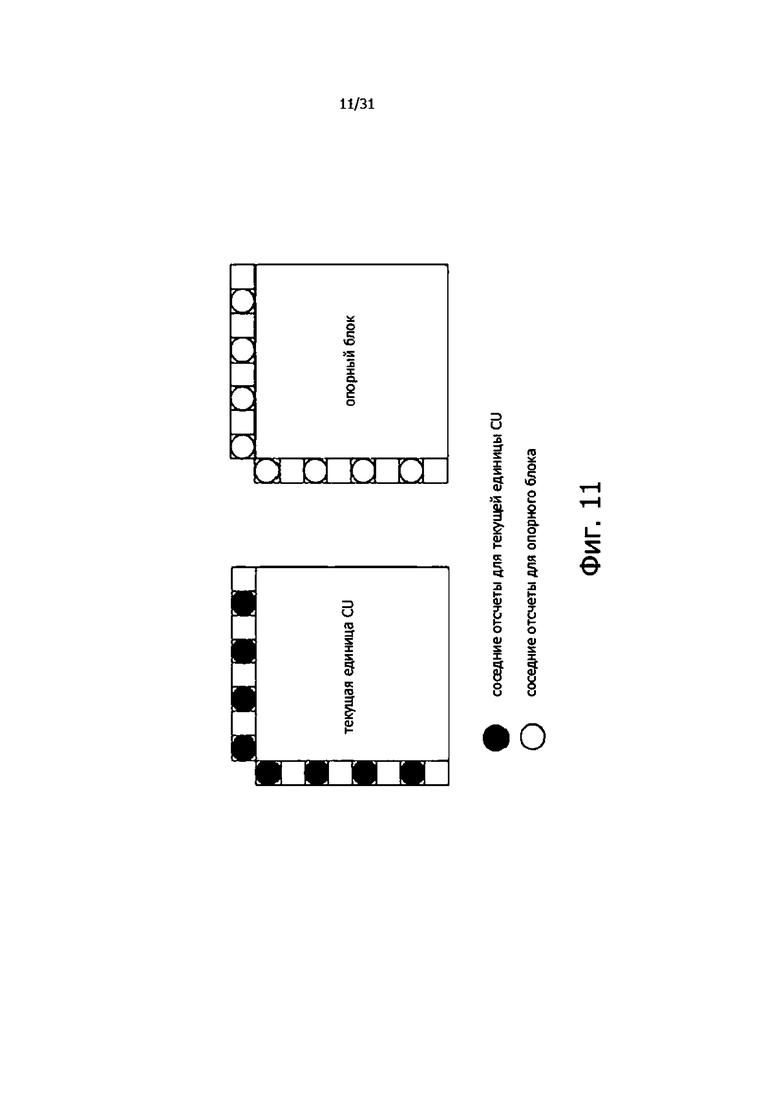
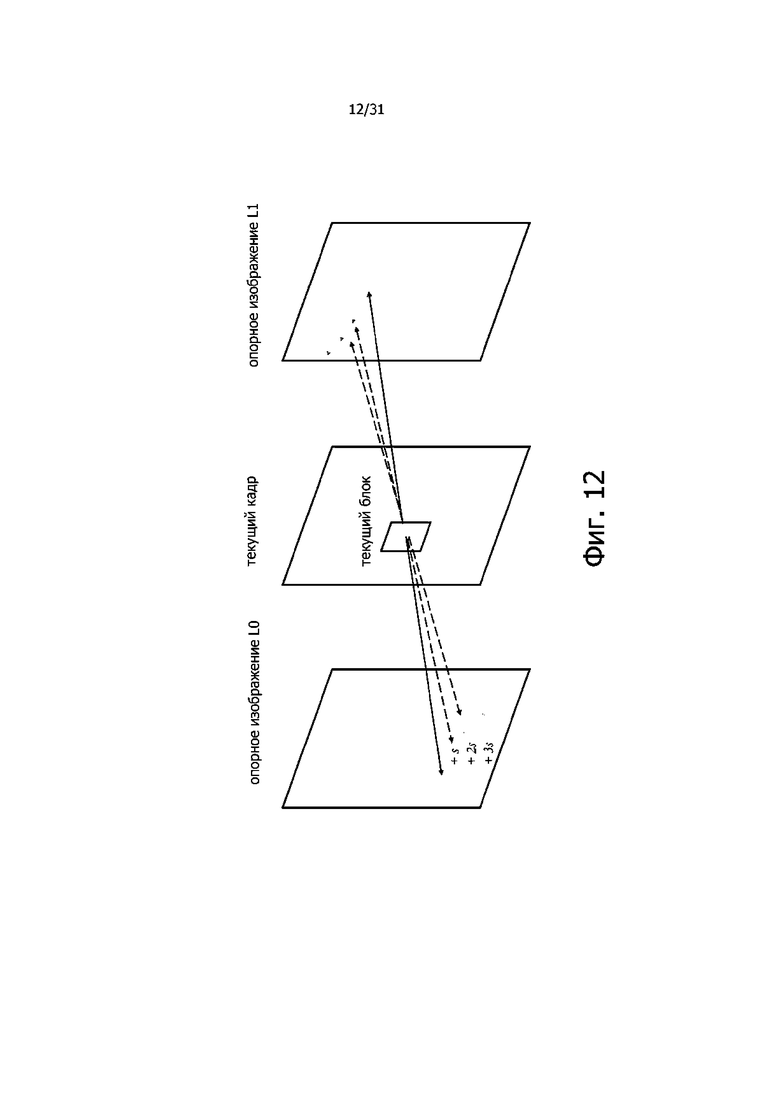
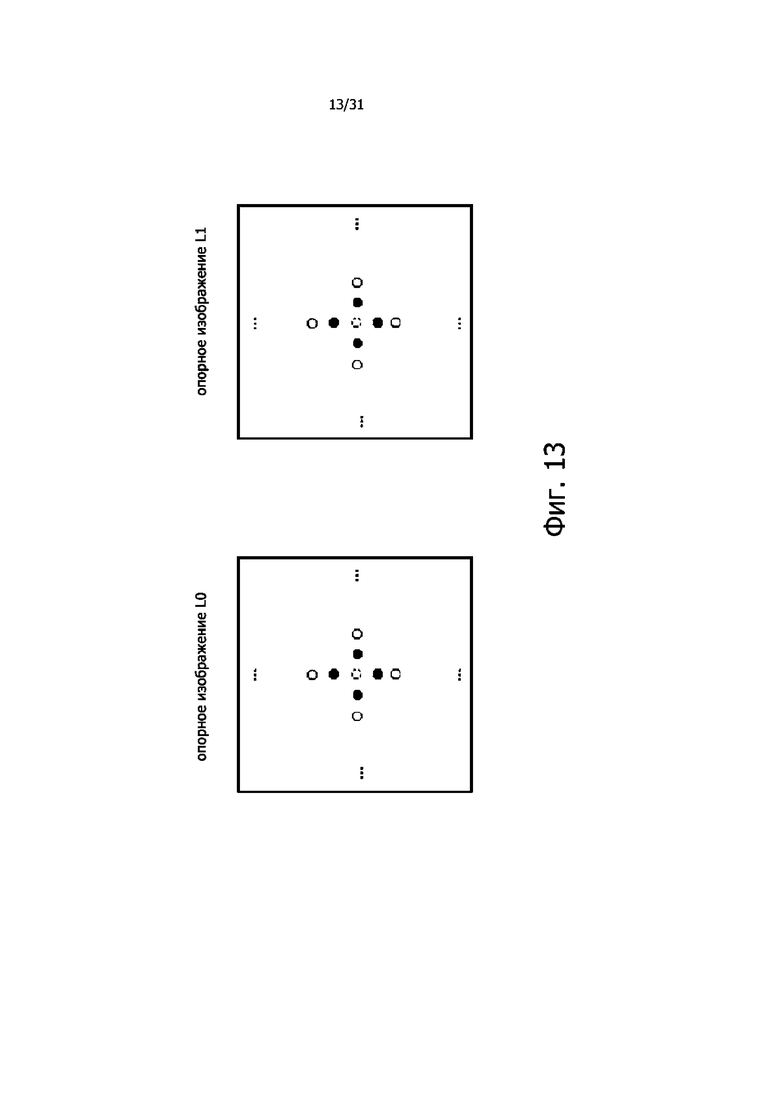
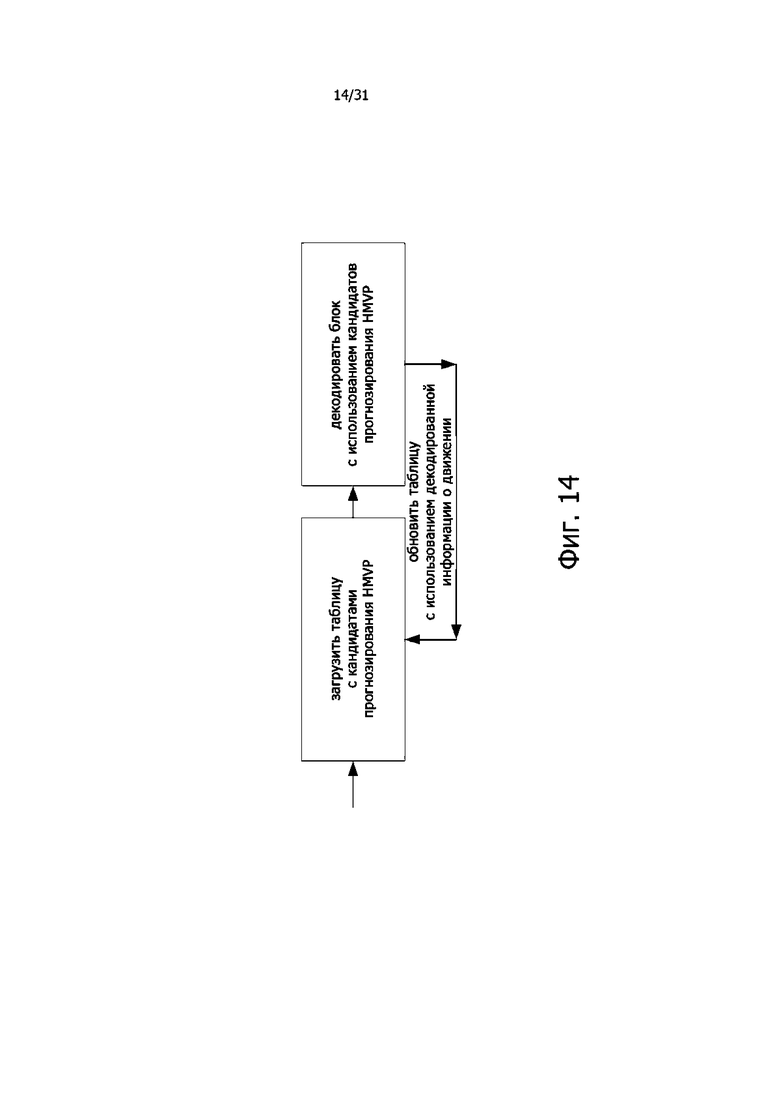
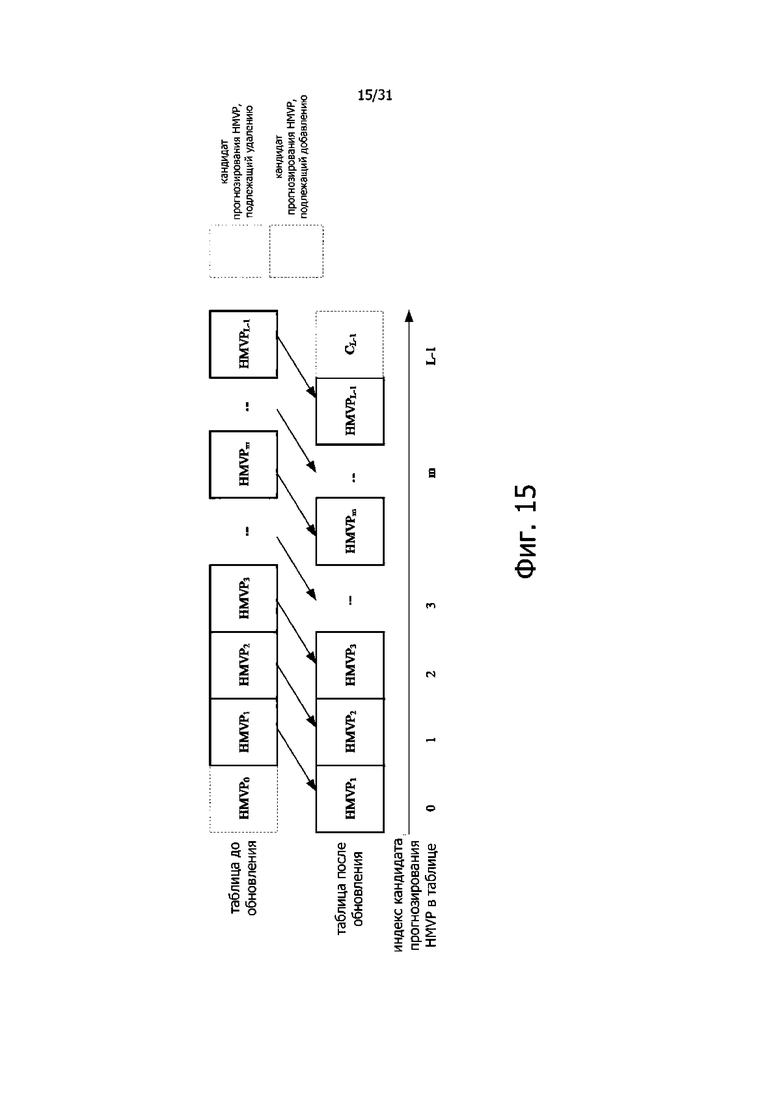
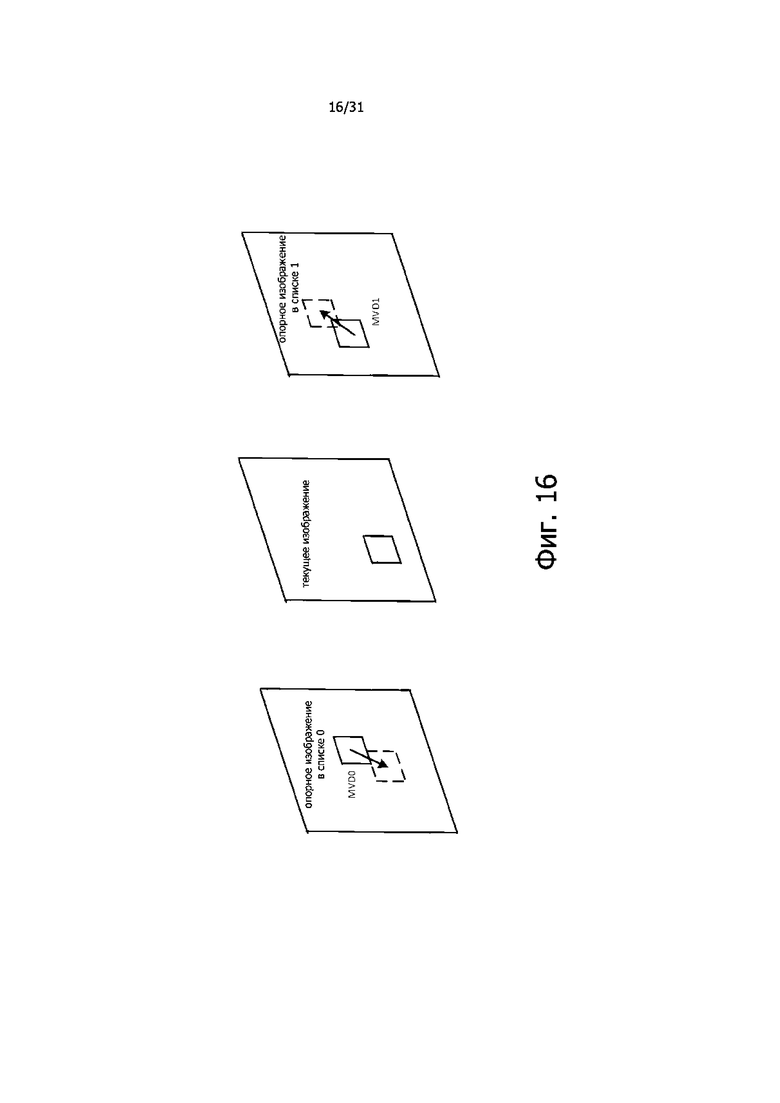
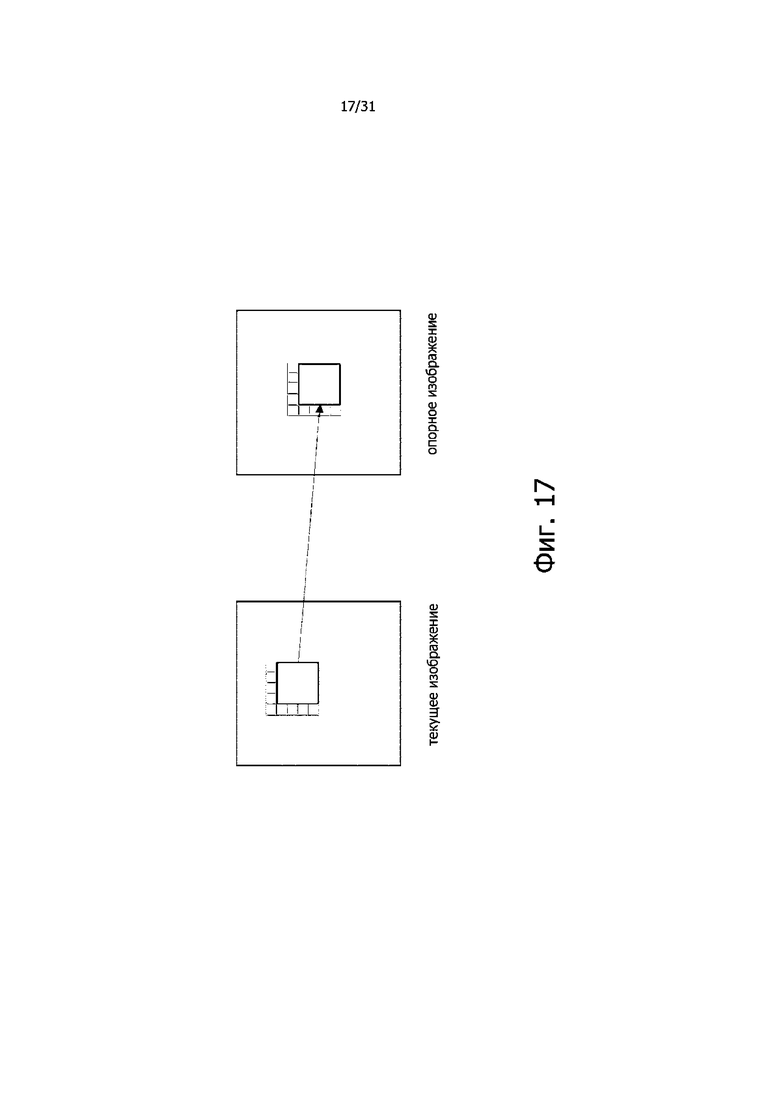
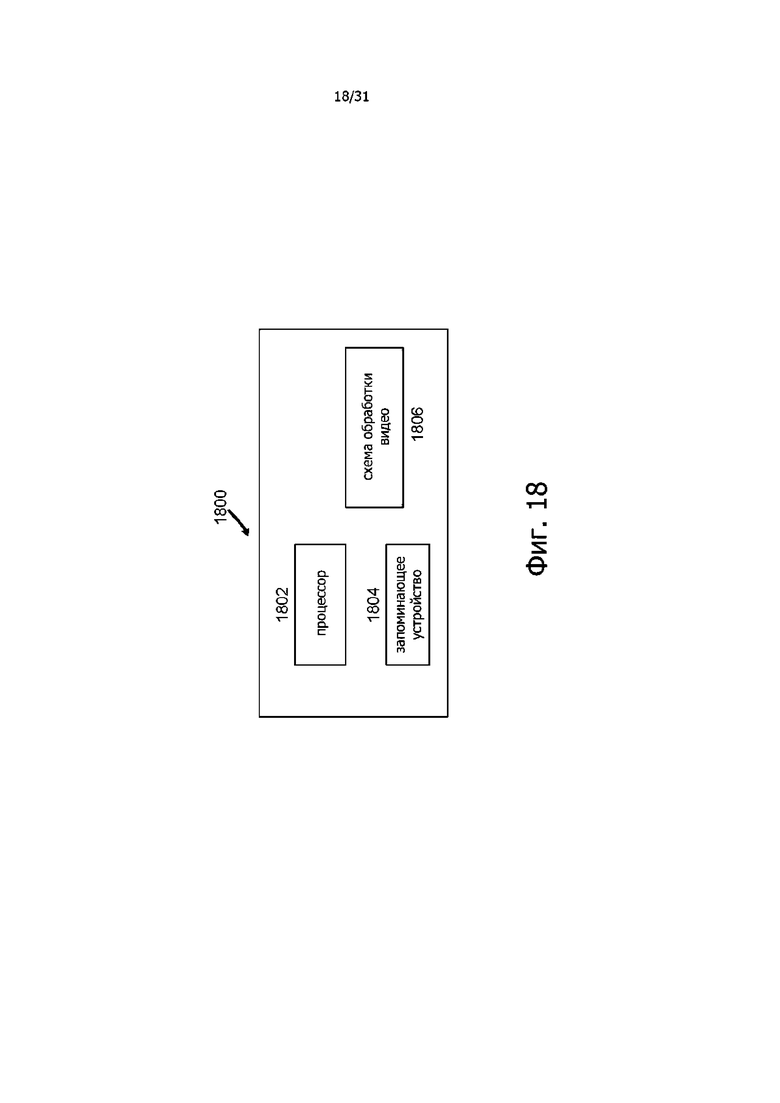
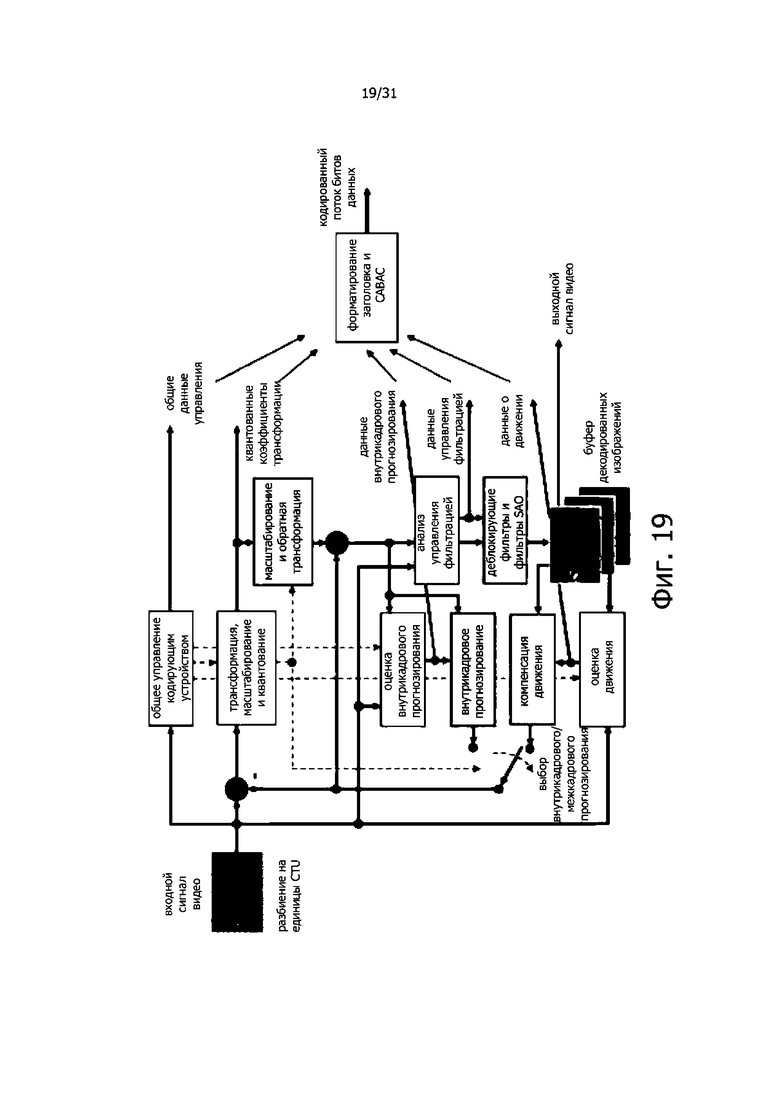
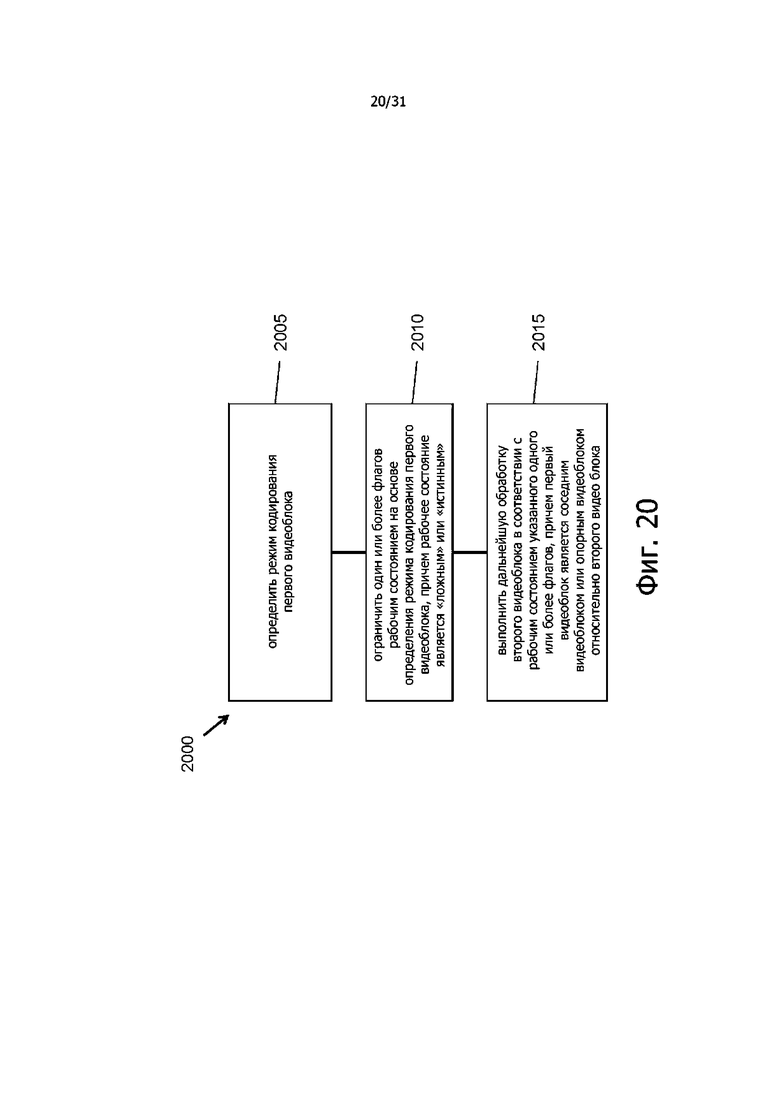
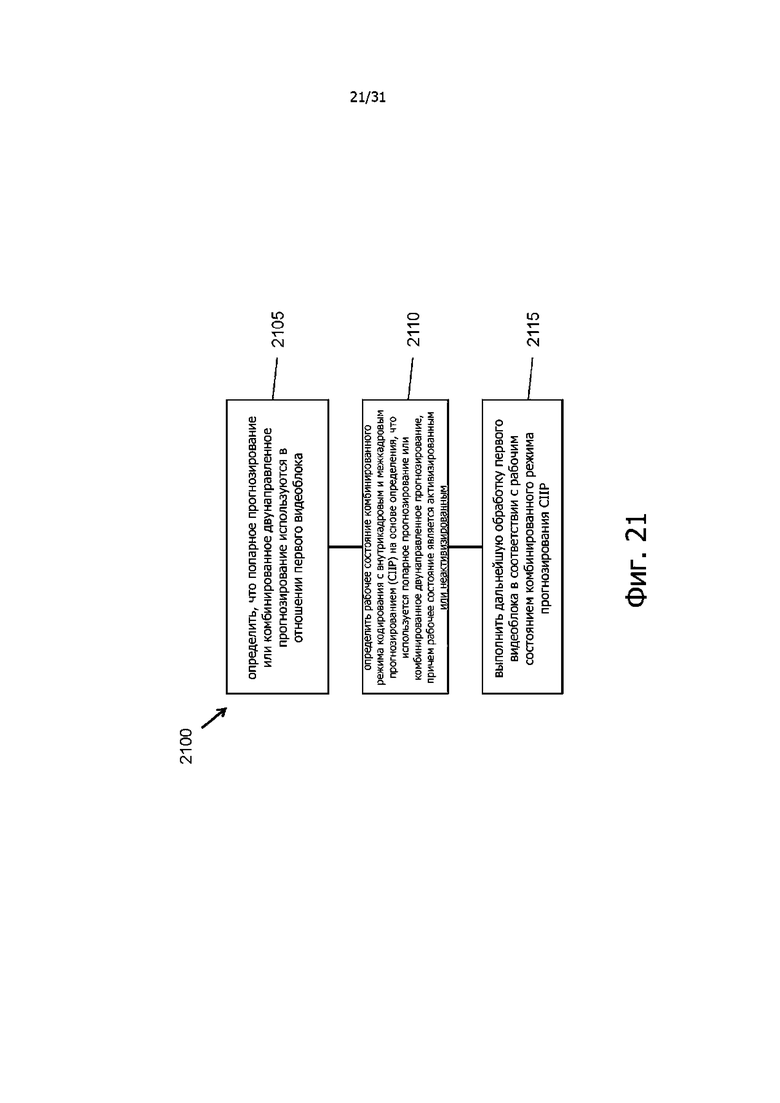
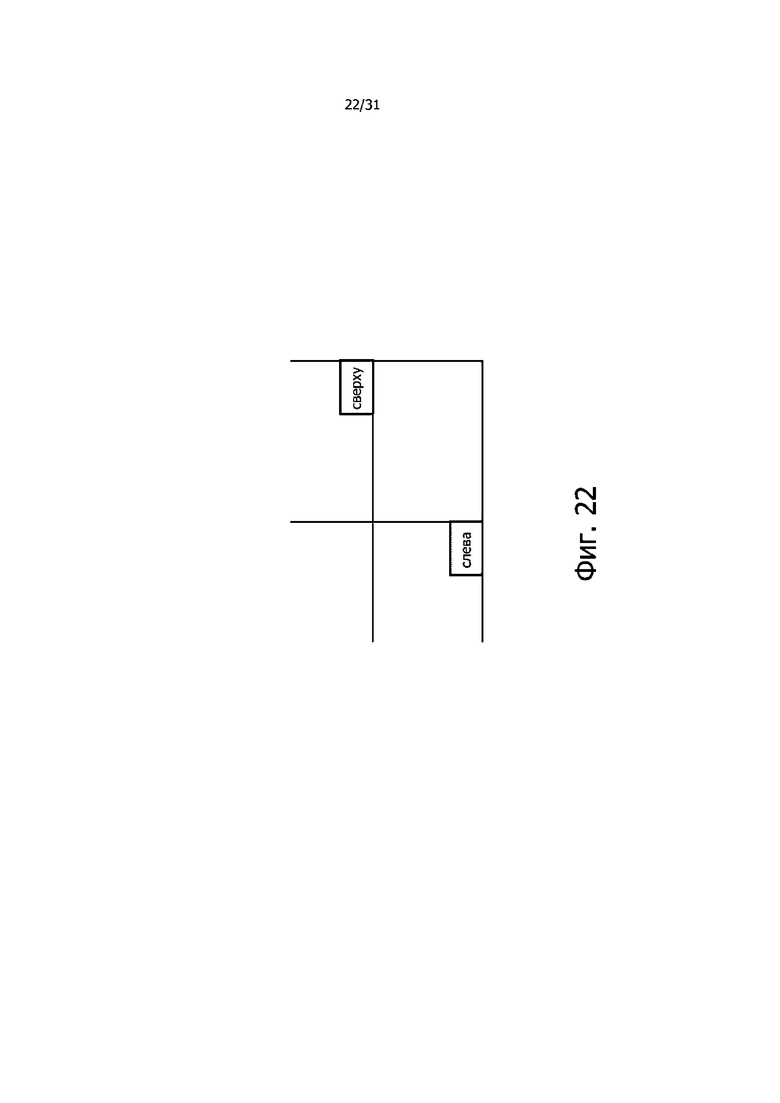
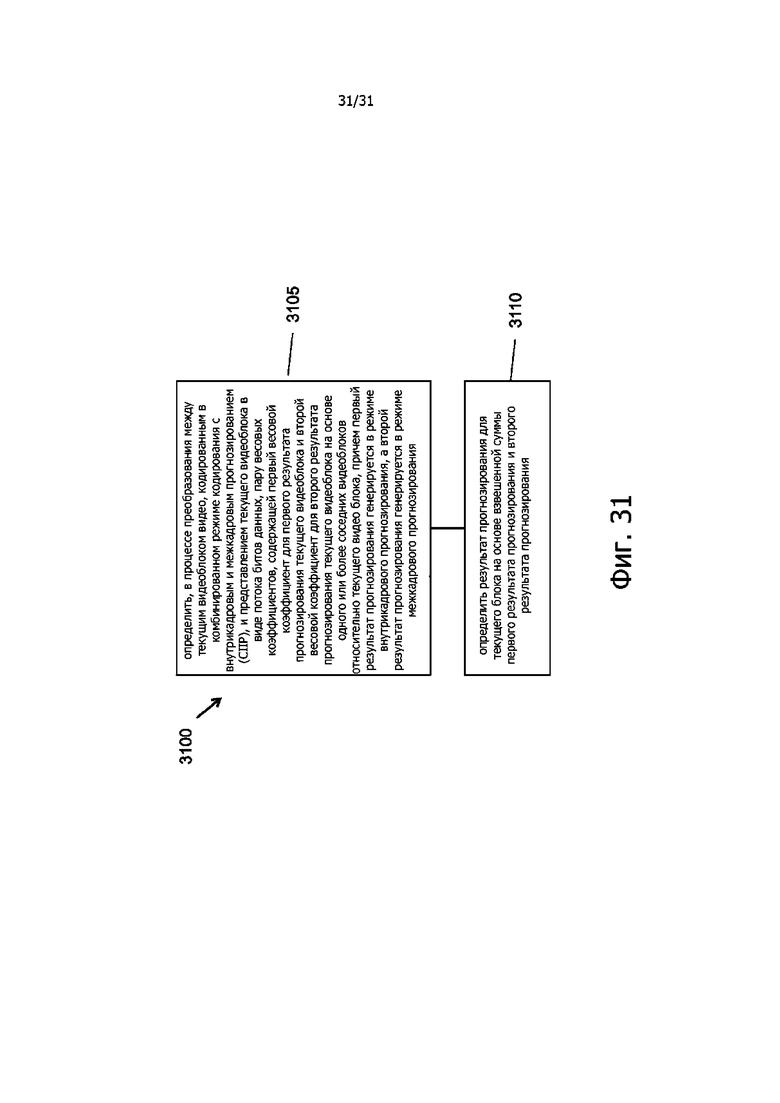
Изобретение относится к усовершенствованной обработке весовых коэффициентов для комбинированного режима внутрикадрового-межкадрового прогнозирования. Способ обработки видео содержит этапы, на которых определяют, в процессе преобразования между текущим видеоблоком, который кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием (CIIP), видео и представлением текущего видеоблока в виде потока битов данных, пару весовых коэффициентов, содержащую первый весовой коэффициент для первого результата прогнозирования текущего видеоблока и второй весовой коэффициент для второго результата прогнозирования текущего видеоблока, на основе одного или более соседних видеоблоков относительно текущего видеоблока, причем первый результат прогнозирования генерируется в режиме внутрикадрового прогнозирования, а второй результат прогнозирования генерируется в режиме межкадрового прогнозирования; и определяют результат прогнозирования текущего блока на основе взвешенной суммы первого результата прогнозирования и второго результата прогнозирования. Изобретение обеспечивает улучшение качества цифрового изображения или видео после декомпрессии или декодирования. 4 н. и 11 з.п. ф-лы, 31 ил.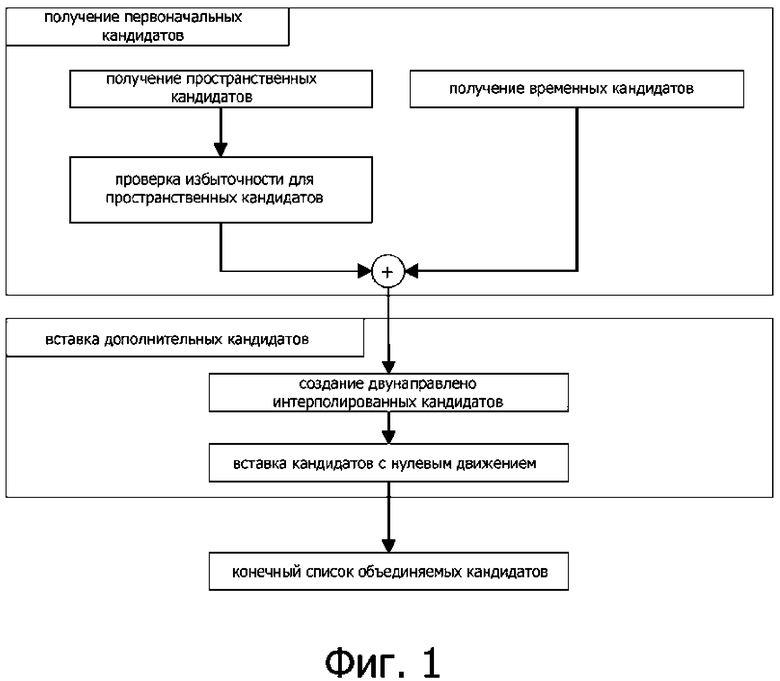
1. Способ обработки видео, содержащий этапы, на которых:
определяют, в процессе преобразования между текущим видеоблоком, который кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием, видеоданных и потоком битов данных, пару весовых коэффициентов, содержащую первый весовой коэффициент для первого результата прогнозирования текущего видеоблока и второй весовой коэффициент для второго результата прогнозирования текущего видеоблока, на основе одного или более соседних видеоблоков относительно текущего видеоблока,
причем первый результат прогнозирования генерируется в режиме внутрикадрового прогнозирования, а второй результат прогнозирования генерируется в режиме межкадрового прогнозирования;
определяют результат прогнозирования текущего блока на основе взвешенной суммы первого результата прогнозирования и второго результата прогнозирования; и
выполняют преобразование на основе результата прогнозирования,
при этом указанная пара весовых коэффициентов определяется в соответствии с режимом прогнозирования указанного одного или более соседних видеоблоков относительно текущего видеоблока,
когда по меньшей мере один соседний видеоблок из указанного одного или более соседних видеоблоков кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием, указанный по меньшей мере один соседний видеоблок рассматривается в качестве видеоблока, кодированного в режиме межкадрового прогнозирования, который не является режимом внутрикадрового прогнозирования,
указанный один или более соседних видеоблоков содержит видеоблок, покрывающий позицию  и видеоблок, покрывающий позицию
и видеоблок, покрывающий позицию  где
где  указывает позицию верхнего левого отсчета текущего видеоблока, cbWidth и cbHeight представляют собой соответственно ширину и высоту текущего видеоблока и параметр "а" определяется с использованием cIdx текущего видеоблока, причем cIdx представляет собой переменную, определяющую индекс цветовой составляющей для текущего блока, и индекс цветовой составляющей текущего блока указывает, что цветовая составляющая текущего блока является яркостной составляющей.
указывает позицию верхнего левого отсчета текущего видеоблока, cbWidth и cbHeight представляют собой соответственно ширину и высоту текущего видеоблока и параметр "а" определяется с использованием cIdx текущего видеоблока, причем cIdx представляет собой переменную, определяющую индекс цветовой составляющей для текущего блока, и индекс цветовой составляющей текущего блока указывает, что цветовая составляющая текущего блока является яркостной составляющей.
2. Способ по п. 1, в котором режим прогнозирования для указанного одного или более соседних видеоблоков указывает, кодирован ли указанный один или более соседних видеоблоков в режиме внутрикадрового прогнозирования или не в режиме внутрикадрового прогнозирования.
3. Способ по п. 1, в котором, когда указанный по меньшей мере один соседний видеоблок кодирован по меньшей мере в одном из режима внутрикадрового копирования блоков, комбинированного режима кодирования с внутрикадровым и межкадровым прогнозированием, режима геометрического разделения или режима палитры, указанный соседний видеоблок рассматривается в качестве блока, кодированного не в режиме внутрикадрового прогнозирования.
4. Способ по п. 1, в котором указанная пара весовых коэффициентов определяется в соответствии с цветовой составляющей текущего видеоблока.
5. Способ по п. 4, в котором позиция указанного одного или более соседних видеоблоков определяется цветовой составляющей текущего видеоблока.
6. Способ по п. 1, в котором указанный один или более соседних видеоблоков содержит по меньшей мере один из левого соседнего видеоблока или верхнего соседнего видеоблока.
7. Способ по п. 1, в котором указанная пара весовых коэффициентов определяется в соответствии с доступностью указанного одного или более соседних видеоблоков, причем для переменной checkPredModeY, определяющей, зависит ли доступность соседнего видеоблока от режима прогнозирования, установлено значение "ложь".
8. Способ по п. 1, в котором в ответ на то, что параметр cIdx для текущего блока равен 0, параметр «а» устанавливается равным 0.
9. Способ по п. 1, в котором в ответ на то, что параметр cIdx для текущего блока не равен 0, параметр «а» устанавливается равным 1.
10. Способ по п. 1, в котором указанная пара весовых коэффициентов определяется на основе двух или более соседних видеоблоков;
когда все из указанных двух или более соседних видеоблоков кодированы в режиме внутрикадрового прогнозирования, указанная пара весовых коэффициентов является первой парой-кандидатом весовых коэффициентов,
когда все из указанных двух или более соседних видеоблоков кодированы в режиме, не являющемся режимом внутрикадрового прогнозирования, указанная пара весовых коэффициентов является второй парой-кандидатом весовых коэффициентов, отличной от первой пары-кандидата весовых коэффициентов,
в противном случае указанная пара весовых коэффициентов является третьей парой-кандидатом весовых коэффициентов, отличной от первой и второй пар-кандидатов весовых коэффициентов.
11. Способ по п. 1, в котором первая пара-кандидат весовых коэффициентов равна (3, 1), вторая пара-кандидат весовых коэффициентов равна (1, 3) и третья пара-кандидат весовых коэффициентов равна (2, 2), причем для пары (х, у) х обозначает первый весовой коэффициент, а у обозначает второй весовой коэффициент.
12. Способ по п. 1, в котором результат прогнозирования получается путем применения пары весовых коэффициентов к результату внутрикадрового прогнозирования и к результату межкадрового прогнозирования по формуле

и где Р - результат прогнозирования,  - первый результат прогнозирования,
- первый результат прогнозирования,  - второй результат прогнозирования, (wInter, wIntra) - пара весовых коэффициентов, параметр offset установлен равным 2.
- второй результат прогнозирования, (wInter, wIntra) - пара весовых коэффициентов, параметр offset установлен равным 2.
13. Устройство обработки данных видео, содержащее процессор и энергонезависимое запоминающее устройство с записанными в нем командами, причем команды при их исполнении процессором вызывают выполнение процессором:
определения, в процессе преобразования между текущим видеоблоком, который кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием, видеоданных и потоком битов данных, пары весовых коэффициентов, содержащей первый весовой коэффициент для первого результата прогнозирования текущего видеоблока и второй весовой коэффициент для второго результата прогнозирования текущего видеоблока, на основе одного или более соседних видеоблоков относительно текущего видеоблока,
причем первый результат прогнозирования генерируется в режиме внутрикадрового прогнозирования, а второй результат прогнозирования генерируется в режиме межкадрового прогнозирования;
определения результата прогнозирования текущего блока на основе взвешенной суммы первого результата прогнозирования и второго результата прогнозирования; и
выполнения преобразования на основе результата прогнозирования,
при этом указанная пара весовых коэффициентов определяется в соответствии с режимом прогнозирования указанного одного или более соседних видеоблоков относительно текущего видеоблока,
когда по меньшей мере один соседний видеоблок из указанного одного или более соседних видеоблоков кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием, указанный по меньшей мере один соседний видеоблок рассматривается в качестве видеоблока, кодированного в режиме межкадрового прогнозирования, который не является режимом внутрикадрового прогнозирования,
указанный один или более соседних видеоблоков содержит видеоблок, покрывающий позицию  и видеоблок, покрывающий позицию
и видеоблок, покрывающий позицию  где
где  указывает позицию верхнего левого отсчета текущего видеоблока, cbWidth и cbHeight представляют собой соответственно ширину и высоту текущего видеоблока и параметр "а" определяется с использованием cIdx текущего видеоблока, причем cIdx представляет собой переменную, определяющую индекс цветовой составляющей для текущего блока, и индекс цветовой составляющей текущего блока указывает, что цветовая составляющая текущего блока является яркостной составляющей.
указывает позицию верхнего левого отсчета текущего видеоблока, cbWidth и cbHeight представляют собой соответственно ширину и высоту текущего видеоблока и параметр "а" определяется с использованием cIdx текущего видеоблока, причем cIdx представляет собой переменную, определяющую индекс цветовой составляющей для текущего блока, и индекс цветовой составляющей текущего блока указывает, что цветовая составляющая текущего блока является яркостной составляющей.
14. Энергонезависимый читаемый компьютером носитель для хранения информации, хранящий команды, которые вызывают выполнение процессором:
определения, в процессе преобразования между текущим видеоблоком, который кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием, видеоданных и потоком битов данных, пары весовых коэффициентов, содержащей первый весовой коэффициент для первого результата прогнозирования текущего видеоблока и второй весовой коэффициент для второго результата прогнозирования текущего видеоблока, на основе одного или более соседних видеоблоков относительно текущего видеоблока,
причем первый результат прогнозирования генерируется в режиме внутрикадрового прогнозирования, а второй результат прогнозирования генерируется в режиме межкадрового прогнозирования;
определения результата прогнозирования текущего блока на основе взвешенной суммы первого результата прогнозирования и второго результата прогнозирования; и
выполнения преобразования на основе результата прогнозирования,
при этом указанная пара весовых коэффициентов определяется в соответствии с режимом прогнозирования указанного одного или более соседних видеоблоков относительно текущего видеоблока,
когда по меньшей мере один соседний видеоблок из указанного одного или более соседних видеоблоков кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием, указанный по меньшей мере один соседний видеоблок рассматривается в качестве видеоблока, кодированного в режиме межкадрового прогнозирования, который не является режимом внутрикадрового прогнозирования,
указанный один или более соседних видеоблоков содержит видеоблок, покрывающий позицию  и видеоблок, покрывающий позицию
и видеоблок, покрывающий позицию  где
где  указывает позицию верхнего левого отсчета текущего видеоблока, cbWidth и cbHeight представляют собой соответственно ширину и высоту текущего видеоблока и параметр "а" определяется с использованием cIdx текущего видеоблока, причем cIdx представляет собой переменную, определяющую индекс цветовой составляющей для текущего блока, и индекс цветовой составляющей текущего блока указывает, что цветовая составляющая текущего блока является яркостной составляющей.
указывает позицию верхнего левого отсчета текущего видеоблока, cbWidth и cbHeight представляют собой соответственно ширину и высоту текущего видеоблока и параметр "а" определяется с использованием cIdx текущего видеоблока, причем cIdx представляет собой переменную, определяющую индекс цветовой составляющей для текущего блока, и индекс цветовой составляющей текущего блока указывает, что цветовая составляющая текущего блока является яркостной составляющей.
15. Энергонезависимый читаемый компьютером носитель для записи информации, хранящий поток битов видеоданных, генерируемых способом, выполняемым устройством обработки видео, причем способ содержит этапы, на которых:
определяют, для текущего видеоблока, который кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием, пару весовых коэффициентов, содержащую первый весовой коэффициент для первого результата прогнозирования текущего видеоблока и второй весовой коэффициент для второго результата прогнозирования текущего видеоблока, на основе одного или более соседних видеоблоков относительно текущего видеоблока,
причем первый результат прогнозирования генерируется в режиме внутрикадрового прогнозирования, а второй результат прогнозирования генерируется в режиме межкадрового прогнозирования;
определяют результат прогнозирования текущего блока на основе взвешенной суммы первого результата прогнозирования и второго результата прогнозирования; и
генерируют битовый поток на основе результата прогнозирования,
при этом указанная пара весовых коэффициентов определяется в соответствии с режимом прогнозирования указанного одного или более соседних видеоблоков относительно текущего видеоблока,
когда по меньшей мере один соседний видеоблок из указанного одного или более соседних видеоблоков кодирован в комбинированном режиме кодирования с внутрикадровым и межкадровым прогнозированием, указанный по меньшей мере один соседний видеоблок рассматривается в качестве видеоблока, кодированного в режиме межкадрового прогнозирования, который не является режимом внутрикадрового прогнозирования,
указанный один или более соседних видеоблоков содержит видеоблок, покрывающий позицию  и видеоблок, покрывающий позицию
и видеоблок, покрывающий позицию  где
где  указывает позицию верхнего левого отсчета текущего видеоблока, cbWidth и cbHeight представляют собой соответственно ширину и высоту текущего видеоблока и параметр "а" определяется с использованием cIdx текущего видеоблока, причем cIdx представляет собой переменную, определяющую индекс цветовой составляющей для текущего блока, и индекс цветовой составляющей текущего блока указывает, что цветовая составляющая текущего блока является яркостной составляющей.
указывает позицию верхнего левого отсчета текущего видеоблока, cbWidth и cbHeight представляют собой соответственно ширину и высоту текущего видеоблока и параметр "а" определяется с использованием cIdx текущего видеоблока, причем cIdx представляет собой переменную, определяющую индекс цветовой составляющей для текущего блока, и индекс цветовой составляющей текущего блока указывает, что цветовая составляющая текущего блока является яркостной составляющей.
| WO 2018067672 A1, 12.04.2018 | |||
| WO 2016072775 A1, 12.05.2016 | |||
| KR 20170119664 A, 27.10.2017. |
