Изобретение относится к области антенной техники и может быть использовано в составе зеркальных антенн станций космической связи.
В современных системах космической связи для повышения пропускной способности применяется повторное использование частот в диапазонах приема и передачи сигналов на ортогональных поляризациях как на вращающихся, так и на линейных.
Повторное использование частот предусматривает исключение взаимного влияния сигналов в сопряженных стволах, что должно обеспечиваться кросс-поляризационной развязкой каналов приема и передачи сигналов с уровнями, при которых кросс-поляризованные сигналы не будут ухудшать отношения сигнал/шум в линиях «Вверх» и «Вниз». Это требование может выполняться при условии, когда электрическая ось антенны отклоняется от направления на космический аппарат (КА) в пределах углов 1дб-контура основного лепестка диаграммы направленности (ДН) антенны, то есть в угловой области с низким уровнем кросс-поляризационного излучения, а облучающая система обеспечивает согласование поляризаций в линиях «Вверх» и «Вниз».
В случаях, когда КА перемещается в пространстве, или антенна земной станции установлена на подвижном носителе, например, на корабле, или имеют место оба случая, для устойчивого функционирования линий «Вверх» и «Вниз» с требуемым качеством необходимо удерживать направление антенны на КА, а при работе на линейных поляризациях обязательно потребуется также адаптивная подстройка поляризаций по максимуму кросс-поляризационной развязки.
Для автоматического сопровождения КА (или удержания антенны в направлении на КА) в антеннах земных станций реализуют режим слежения приходящих сигналов с использованием, как правило, моноимпульсного метода при формировании суммарной и разностной ДН или четырехрупорным облучателем, или рупорным облучателем, возбуждаемым основной модой и модами высших типов.
При слежении КА, являющегося источником радиоизлучения (ИРИ), на выходах пеленгационного и информационного каналов появляются сигналы, принимаемые по разностной и суммарной ДН антенны, ЕΔ и ЕΣ, при этом сигналы ЕΔ содержат данные о положении электрической оси антенны относительно направления прихода сигналов и имеют нулевые значения, когда электрическая ось антенны совмещается с направлением на КА.
Сигналы ошибки Еош, которые получают нормированием сигналов ЕΔ сигналами ЕΣ, изменяются линейно при отклонении от оси на угол в, что позволяет представить их в виде

коэффициент k определяется наклоном характеристики сигнала ошибки, k=∂Еош/∂π.
Поскольку пеленгационные характеристики следящей антенны зависят не только от построения облучающей системы, формирующей суммарно-разностные ДН, но и от степени согласования ее поляризаций с поляризацией приходящих сигналов, то они могут существенно ухудшаться при изменении поляризации сигналов, особенно в случае изменения во времени ориентации вектора линейно-поляризационного сигнала.
В этой связи, одним из основных условий устойчивого приема сигналов в режиме автосопровождения КА является обеспечение согласования поляризации приходящих сигналов с поляризациями выходов не только суммарного (информационного), но и пеленгационного каналов.
Известна облучающая система следящей антенной системы [1 - D. Savini. An improved automatic tracking system for linear and circular polarization. CSELT Rapp.Tech/ 1980, 8 pp. 239-282], предназначенной для приема сигналов с повторным использованием частот, как на линейных, так и на круговых поляризациях. Облучающая система формирует информационные каналы и пеленгационный канал, имея в своем составе многомодовый рупор, вращающийся ответвитель моды Н21, конический переход, 90°-поляризатор (для выбора круговых и линейных поляризаций), 180°-поляризатор (для подстройки линейных поляризаций) и ортомодовый преобразователь (ОМП) для разделения принимаемых сигналов ортогональных поляризаций. Ответвитель моды Н21 представляет собой компактное устройство, устанавливаемое позади горловины рупора, которое содержит две пары продольных узких щелей, введенных в секции круглого волновода с диаметром, достаточным для поддержания мод Н11 и Н21 в полосе приема. Осевое расстояние между секциями круглого волновода составляет примерно половину длины волны моды Н21 для возбуждения двух максимальных сигналов стоячей волной благодаря коническому переходу, соединяющему многомодовый волновод (Н11, H21) с одномодовым волноводом (Н11). Относительная ориентация 45° между двумя парами щелей, расположенных на азимутальных углах ϕ и ϕ+45°, позволяет возбудить две ортогональные моды Н21 для получения полной информации о распределении поля внутри волновода. Сигналы от каждой пары диаметрально расположенных щелей передаются через два плеча прямоугольных волноводов с одинаковыми поперечными сечениями к Е - плоскостному гибридному соединению для получения сигнала слежения. К выходам гибридных соединений присоединен следящий приемник. Сигналы ошибки в следящем приемнике формируются нормированием опорного сигнала, который ответвляется от выходов ОМП.
На вращающихся поляризациях сигналы ошибки с выходов следящего приемника могут напрямую использоваться электроприводами системы наведения антенны.
В случае линейных поляризаций для исключения паразитных составляющих в сигналах ошибки азимутальный угол ϕ щелей ответвителя моды Н21 (щели параллельные плоскости земли), также как и один из выходов ОМП, должны быть согласованы с плоскостью поляризации падающей волны, имеющей угол α. Это согласование выполняется вращением ответвителя моды Н21 с присоединенным к нему следящим приемником и секции 180°-поляризатора на угол α/2, которое осуществляется одним синхронно-передающим приводом по команде от модуля управления, входящего в состав облучающей системы.
К основным недостаткам этой облучающей системы следует отнести:
- возможность формирования сигналов ошибки по пилот-сигналу только определенной частоты без возможности перенастройки на другие несущие в пределах рабочей полосы приемного канала, что определяется рабочей полосой следящего ответвителя (менее 2%);
- низкий уровень отбора мощности сигнала ошибки (минус 3дБ) следящим ответвителем, уменьшающим крутизну пеленгационной характеристики;
- громоздкость и сложность конструкции из-за применения синхронно-передающего привода для вращения двух устройств, секции 180°-поляризатора и сборки, включающей ответвитель моды Н21, приемник слежения и линию опорного сигнала.
Известна облучающая система (ОС) зеркальной антенны типа Кассегрена [2 - Lee J. Cooper. A frequency reuse, monopulse tracking feed for cassegrain antenna application. 1980 Internation IEEE AP-S Digest pp. 97-100], которая наиболее близка по технической сущности и достигаемому результату и выбрана в качестве прототипа. Эта ОС обеспечивает прием и передачу сигналов на ортогональных круговых или линейных поляризациях в разнесенных диапазонах частот (4 ГГц и 6 ГГц соответственно) в режиме автосопровождения приходящих сигналов моноимпульсным методом. ОС состоит из многомодового рупора, двухканального тракта автосопровождения сигналов, образованного ответвителем ортогональных мод Н21, гибридным соединением и моторизованным двухпозиционным волноводным переключателем (ВП2х2), двухполяризационного частотного диплексера и двухканальных трактов приема и передачи сигналов. Тракты приема и передачи сигналов имеют идентичное построение и состоят из последовательно соединенных 180°- и 90°- поляризаторов с дифференциальными секциями, вращаемых электромеханическими приводами, и ортомодовых преобразователей. Позиционирование дифференциальных секций поляризаторов выполняется от модуля управления, что позволяет осуществлять дистанционно в обоих трактах выбор вращающихся или линейных поляризаций (90°-поляризаторы) или установку плоскости линейной поляризации (180°- поляризаторы). Выбор поляризации по выходу тракта слежения, левого или правого направления вращения, осуществляется позиционированием входов/выходов ВП2х2.
Поскольку каналы тракта слежения имеют только вращающиеся поляризации, то приходящие сигналы линейных поляризаций будут приниматься по обоим каналам одновременно, при этом эти сигналы будут иметь разные фазово-частотные характеристики, зависящие от угла наклона плоскости поляризации сигнала α.
Изменение ориентации секции 90°- поляризаторов на ±45° при переходе с круговой поляризации на линейную или наоборот, а также изменение ориентации секции 180°-поляризатора на угол ϕ/2 при подстройке вектора электрического поля приходящей линейно-поляризованной волны на угол ϕ приводит к возникновению разницы групповой задержки опорного сигнала UΣ и сигнала ошибки UΔ разностного канала на входе приемника. Для компенсации этой разницы опорный канал должен иметь в своем составе фазовращатель с разрядностью не менее шести, управляемый по командам, формируемым модулем управления по данным, содержащим углы ориентации дифференциальных секции 180°- и 90°- поляризаторов приемного тракта и состояние выходного переключателя тракта слежения ВП2х2. При отсутствии компенсации в каналах слежения появятся перекрестные помехи, из-за которых будут возникать ошибки наведения антенны, приводящие к срыву слежения КА.
Основными недостатками известного устройства-прототипа являются:
- ограниченное применение из-за повышенной массы и больших габаритных размеров конструкции, требующей для установки конструктивный объем зеркального и подзеркального пространства, который, как показывает анализ существующих следящих зеркальных антенн (ЗА), может быть реализован при диаметре рефлектора не менее (90÷100) λср рабочего диапазона частот;
- формирование сигналов ошибки при работе на линейных поляризациях реализуется только по сигналам, не имеющим смежных ортогонально поляризованных сигналов;
- формируемый на линейных поляризациях уровень сигнала ошибки UΔ не менее чем в два раза ниже, чем на круговых, что существенно сказывается на крутизне пеленгационной характеристики и, соответственно, на точности слежения;
- при быстрых изменениях ориентации плоскостей приходящих ортогонально-поляризованных сигналов волноводный 180°- поляризатор с электромеханическим приводом из-за ошибок позиционирования фазосдвигающей секции не может поддерживать в каналах приемного тракта устойчивый уровень кросс-поляризационных составляющих сигналов;
- для обеспечения работы с сигналами круговых и линейных поляризаций опорный канал должен содержать фазовращатель с разрядностью не менее шести, управляемый модулем управления.
Технической проблемой, на решение которой направлено предлагаемое изобретение является обеспечение в следящих зеркальных антеннах стабилизации угловой зависимости сигнала ошибки и минимизации кросс-поляризационных составляющих сигналов в каналах приема при любых поляризациях приходящих сигналов, а также уменьшении габаритных размеров и массы облучающей системы.
Для решения указанной технической проблемы предлагается облучающая система следящей зеркальной антенны состоящая из многомодового рупора, ответвителя ортогональных мод Н21, двухполяризационного частотного диплексера, ортомодового преобразователя, канала автосопровождения, канала приема, модуля гетеродина и модуля управления.
Согласно изобретению к выходам ответвителя ортогональных мод Н21 присоединены малошумящие усилители-частотные преобразователи, соединенные со входами устройства поляризационного согласования, а к синфазным выходам ортомодового преобразователя, также присоединены малошумящие усилители-частотные преобразователи, соединенные со входами устройства поляризационного согласования, при этом оба устройства поляризационного согласования имеют идентичное построение и образованы тремя каскадно-соединенными квадратурными направленными ответвителями с регулируемыми связями, между первым и вторым квадратурными направленными ответвителями - в виде перестраиваемых дифференциальных фазовращателей, между вторым и третьим квадратурными направленными ответвителями - в виде коммутируемых фазовращателей 0↔π/2, при этом малошумящие усилители-частотные преобразователи осуществляют когерентное частотное преобразование сигналов с гетеродинными сигналами, поступающими от 4-х канального модуля гетеродина с независимой регулировкой фазы гетеродинных сигналов в каждом канале, а согласование поляризаций приходящих сигналов в канале автосопровождения и канале приема производится одновременно изменением состояний всех перестраиваемых дифференциальных фазовращателей обоих устройств поляризационного согласования по единым командам, формируемым модулем управления по измеренным отношениям уровня кросс-поляризационной составляющей сигнала к уровню сигнала на основной поляризации.
Таким образом, технический результат заключался в получении в облучающей системе поляризационного согласования как канала приема, так и канала автосопровождения с приходящими сигналами ортогональных вращающихся или ортогональных линейных поляризаций. В результате угловая зависимость сигналов ошибки, возникающих в канале автосопровождения при отклонении электрической оси антенны от линии визирования на ИРИ, будет одинаковой для всех видов поляризаций.
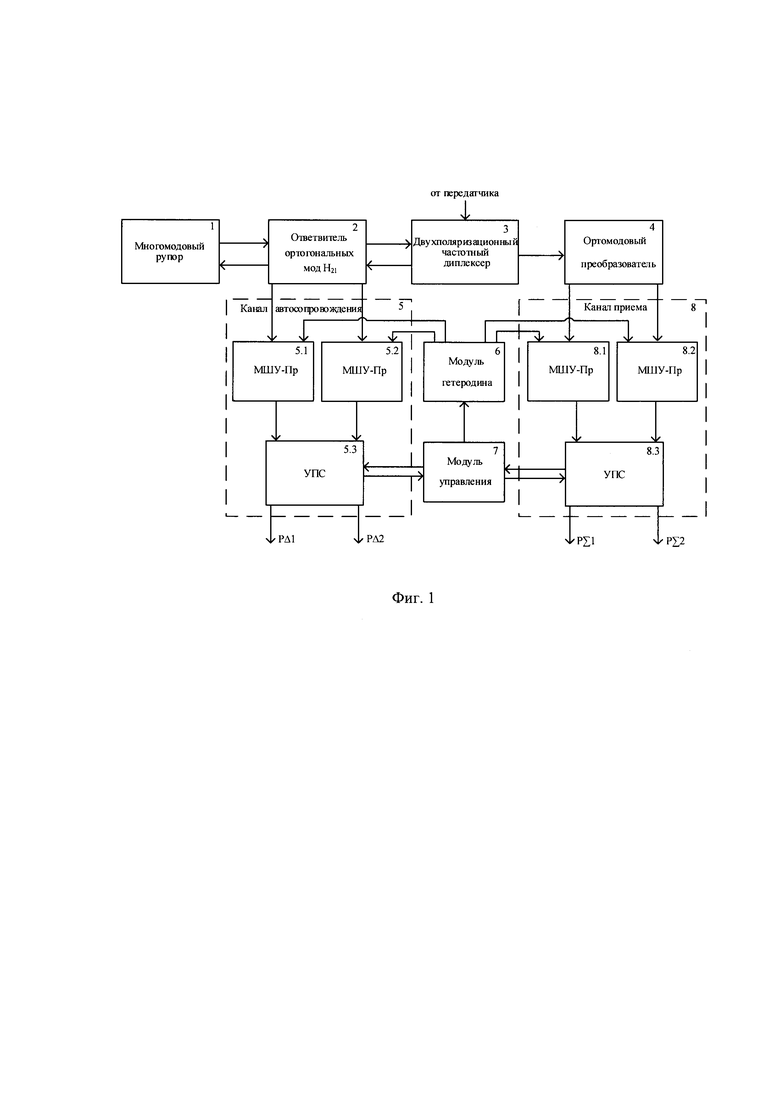
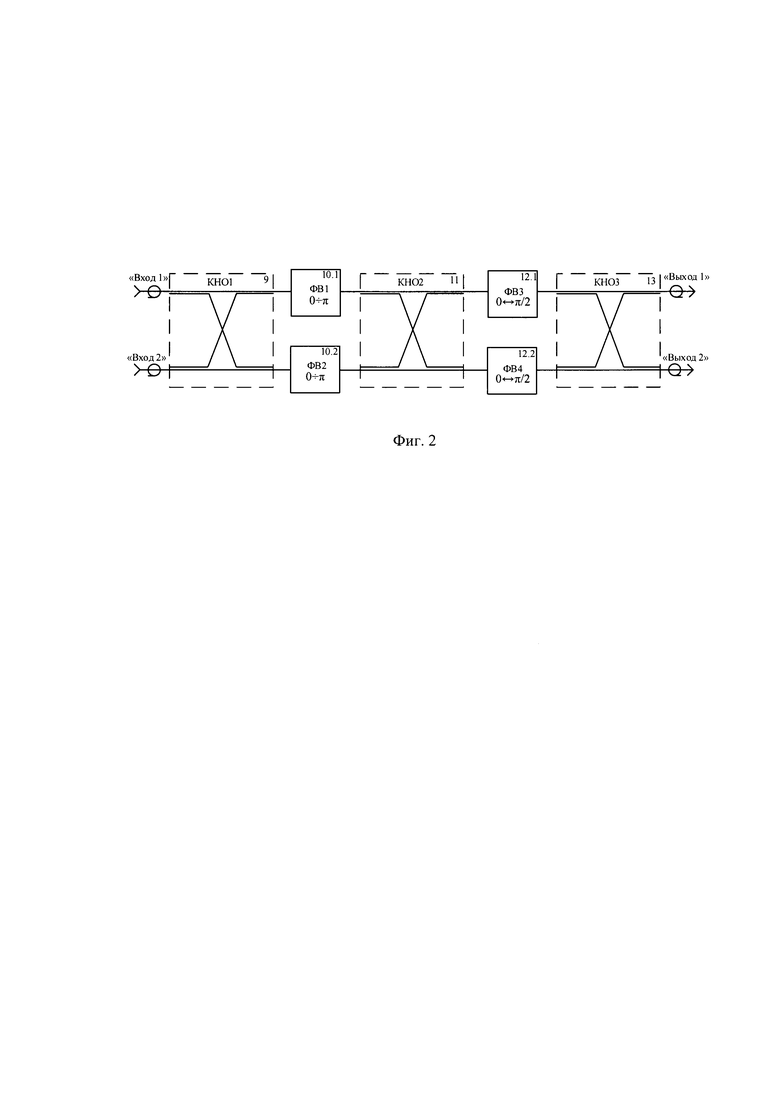
На фиг.1 приведена схема облучающей системы следящей зеркальной антенны. На фиг.2 приведена схема устройства поляризационного согласования.
Облучающая система следящей зеркальной антенны (фиг.1) состоит из многомодового рупора (1), ответвителя ортогональных мод Н21 (2), двухполяризационного частотного диплексера (3), ортомодового преобразователя (ОМП) (4), канала автосопровождения (5), модуля гетеродина (МГ) (6), модуля управления (МУ) (7) и канала приема (8). Многомодовый рупор (1) соединен с ответвителем ортогональных мод Н21 (2), далее соединен с двухполяризационным частотным диплексером (3), к выходу которого присоединен ОМП (4), второй вход двухполяризационного частотного диплексера (3) соединен с передатчиком (на фиг.1 показано условно). К выходам ответвителя ортогональных мод Н21 (2) присоединен канал автосопровождения (5) выполненный в виде малошумящих усилителей-частотных преобразователей (МШУ-Пр) (5.1, 5.2), соединенных с входами устройства поляризационного согласования (УПС) (5.3). К выходам ОМП (4) присоединен канал приема (8) выполненный в виде МШУ-Пр (8.1, 8.2), соединенный со входами УПС (8.3). Общий модуль гетеродина (МГ) (6) соединен с входами МШУ-Пр (5.1, 5.2, 8.1, 8.2). Модуль управления (МУ) (7) соединен с МГ (6) и УПС (5.3, 8.3). УПС (5.3, 8.3) обеспечивают подачу сигналов одновременно к МУ (7), приемной аппаратуре и следящему приемнику (на фиг.1 показаны условно как РΔ1, РΔ2, Р"8"1, РΣ2). УПС (5.3) и УПС (8.3) имеют идентичное построение согласно схеме, приведенной на фиг.2 (показана схема одного из УПС (5.3, 8.3)), и образованы тремя каскадно-соединенными квадратурными направленными ответвителями КНO1 (9), КНO2(11), КНО3(13) с регулируемыми связями. Между КНO1 (9) и КНO2 (11) регулируемая связь показана в виде перестраиваемых в пределах 0÷π дифференциальных фазовращателей ФВ1 (10.1) и ФВ2(10.2), между КНO2 (11) и КНО3 (13) - в виде коммутируемых фазовращателей 0↔π/2 ФВ3 (12.1) и ФВ4 (12.2). Выход МШУ-Пр (5.1, 8.1) (фиг.1) подключен к «входу 1» (фиг.2), выход МШУ-Пр (5.2, 8.2) (фиг.1) подключен к «входу 2» (фиг.2) (в УПС 5.3 и 8.3 соответственно). К выходам «выход 1» и «выход 2» (фиг.2) подключены приемная аппаратура и следящий приемник (на фиг.1 показаны условно как РΔ1, РΔ2 или РΣ1, РΣ2).
Облучающая система следящей зеркальной антенны (фиг.1) работает следующим образом.
При наведении зеркальной антенны (на фиг. не показана) в направлении на ИРИ сфокусированные сигналы принимаются многомодовым рупором (1) по разностным и суммарным ДН, и независимо от поляризационных характеристик приходящих сигналов их ортогональные составляющие (ЕΔГор и ЕΔВер) отбираются по ортогональным выходам ответвителя ортогональных мод Н21 (2), проходят двухполяризационный частотный диплексер (3) и отбираются по ортогональным выходам ОМП (4) (ЕΣГор и ЕΣВер). Далее ортогональные составляющие усиливаются и преобразуются по частоте парами МШУ-Пр (5.1, 5.2 и 8.1, 8.2) обоих каналов в сигналы промежуточной частоты (ПЧ) и передаются на входы соответствующих УПС (5.3, 8.3). МШУ-Пр (5.1, 5.2, 8.1, 8.2) выполняются с идентичными амплитудно-частотными характеристиками (АЧХ) и фазово-частотными характеристиками (ФЧХ), при этом в МГ (6) предусмотрена независимая регулировка в каждом из четырех каналов фазы гетеродинного сигнала, поступающего на МШУ-Пр (5.1, 5.2, 8.1, 8.2). Это позволяет реализовать идентичность АЧХ и ФЧХ сигналов ПЧ на входах каждого УПС (5.3, 8.3) и управлять характеристиками сигналов.
При работе по сигналам вращающихся поляризаций (правого или левого направлений вращения) фазовращатели ФВ3 и ФВ4 (12.1, 12.2) (фиг.2) устанавливаются в положение «0», а в фазовращателях ФВ1 и ФВ2 (10.1, 10.2) устанавливается дифференциальный фазовый сдвиг равный удвоенному значению угла наклона осей эллипса приходящих волн относительно выхода ОМП (4) (фиг.1). В результате квадратурного суммирования составляющих сигналов, поступающих на входы УПС (5.3, 8.3) (фиг.1) на их выходах получают разделенные сигналы приходящих ортогональных вращающихся поляризаций.
При работе на линейных поляризациях в обоих УПС (5.3, 8.3) (фиг.1) один из фазовращателей, ФВ3 или ФВ4 (12.1, 12.2) (фиг.2), устанавливается в положение «π/2», а в фазовращателях ФВ1 и ФВ2 (10.1, 10.2) устанавливается дифференциальный фазовый сдвиг равный удвоенному значению угла наклона векторов электрического поля приходящих волн относительно ориентации выхода ОМП (4) (фиг.1). В результате на выходы УПС (5.3, 8.3) поступают разделенные сигналы ортогональных поляризаций с минимизированными кросс-составляющими этих сигналов. Фазовые состояния фазовращателей ФВ1 - ФВ4 (10.1, 10.2, 12.1, 12.2) (фиг.2) в обоих УПС (5.3, 8.3) (фиг.1) устанавливаются по командам, которые формируются МУ (7), по измерениям отношения кросс-поляризационной составляющей к основному сигналу в каналах приемного тракта.
При временных вариациях поляризаций приходящих волн, как линейных, так и вращающихся, соответственно изменяется дифференциальный фазовый сдвиг фазовращателей ФВ1 и ФВ2 (10.1, 10.2) (фиг.2) в обоих УПС (5.3, 8.3) (фиг.1).
Таким образом, облучающая система обеспечивает поляризационное согласование канала приема и канала автосопровождения с приходящими сигналами ортогональных вращающихся или ортогональных линейных поляризаций. В результате угловая зависимость сигналов ошибки, возникающих в каналах автосопровождения при отклонении электрической оси антенны от линии визирования на ИРИ, будет одинаковой для всех видов поляризаций.
Поскольку смена и подстройка поляризаций в обоих каналах осуществляется одновременно одним способом - изменением состояний фазовращателей в УПС (5.3, 8.3) (фиг.1), которые имеют идентичные коэффициенты передачи, то фазировка сигналов ошибки каналов автосопровождения, и соответствующих им опорных сигналов каналов приема на входах приемника слежения, будет сохраняться для любых поляризаций сигналов, что обеспечит неизменность пеленгационной характеристики облучающей системы.
Анализ известных технических решений (аналогов) в области реализации облучающих систем следящих зеркальных антенн позволяет сделать вывод о том, что хотя использование многомодового рупора (1) (фиг.1), ответвителя ортогональнальных мод H21(2), ОМП (4) и МШУ-Пр (5.1, 5.2, 8.1, 8.2) известно, в предложенной конфигурации облучающей системы с учетом их взаимосвязи с УПС (5.3, 8.3) и МУ (7) позволяет обеспечить стабилизацию угловой зависимости сигнала ошибки в канале автосопровождения (5), минимизацию кросс-поляризационных составляющих сигналов в канале приема (8) при любых приходящих сигналов различных поляризаций, а также уменьшает габаритные размеры и массу, что свидетельствует о получении положительного эффекта.
Таким образом, отличительными признаками, характеризующими данную облучающую систему, являются построение канала автосопровождения (5) (фиг.1) и канала приема (8), их взаимная связь и управление.
Сочетание отличительных признаков и свойств предлагаемого изобретения из литературы не известны, поэтому оно соответствует критериям новизны и изобретательского уровня.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-ПОЛЯРИЗАЦИОННЫЙ СЕЛЕКТОР | 2016 |
|
RU2647203C2 |
| Ортомодовый селектор облучателя зеркальной антенны | 2024 |
|
RU2821156C1 |
| Моноимпульсный облучатель круговой поляризации | 2023 |
|
RU2819745C1 |
| СПОСОБ АДАПТИВНОГО ПРЕОБРАЗОВАНИЯ ПОЛЯРИЗАЦИИ РАДИОСИГНАЛОВ | 1993 |
|
RU2090963C1 |
| Способ повышения дальности активной ретрансляции сигналов радиочастотной идентификации УВЧ-диапазона | 2023 |
|
RU2808932C1 |
| ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1991 |
|
SU1841076A1 |
| КОМПАКТНЫЙ У3ЕЛ ВОЗБУЖДЕНИЯ ДЛЯ СОЗДАНИЯ КРУГОВОЙ ПОЛЯРИЗАЦИИ В АНТЕННЕ И СПОСОБ ПОЛУЧЕНИЯ ТАКОГО КОМПАКТНОГО УЗЛА ВОЗБУЖДЕНИЯ | 2009 |
|
RU2511488C2 |
| Двухдиапазонный облучатель с комбинированным преобразователем мод | 2018 |
|
RU2680424C1 |
| УГЛОВОЙ ДИСКРИМИНАТОР | 2002 |
|
RU2202806C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ "НЕЛИНЕЙНЫХ" РАДИОЛОКАЦИОННЫХ ХАРАКТЕРИСТИК | 2003 |
|
RU2265230C2 |
Использование: изобретение относится к антенной технике и может быть использовано в составе зеркальных антенн земных станций космической связи. Сущность: облучающая система следящей зеркальной антенны состоит из многомодового рупора, ответвителя ортогональных мод Н21, двухдиапазонного частотного диплексера, ортомодового преобразователя, канала автосопровождения, канала приема, модуля гетеродина и модуля управления. Канал автосопровождения состоит из пары малошумящих усилителей-преобразователей частоты в сигналы промежуточных частот МШУ-Пр, установленных по выходам ответвителя мод Н21, и устройства поляризационного согласования УПС, присоединенного к выходам МШУ-Пр. Канал приема состоит из аналогичных элементов, установленных по выходу ОМП. Четырехканальный модуль гетеродина МГ и модуль управления МУ присоединены к входам соответствующих МШУ-Пр. МШУ-Пр осуществляют когерентное частотное преобразование сигналов с внешними гетеродинными сигналами от МГ, имеющего независимую регулировку фазы гетеродинных сигналов в каждом канале. УПС имеют идентичное построение и образованы тремя каскадно соединенными квадратурными направленными ответвителями КНО с регулируемыми связями. На выходы обоих УПС поступают разделенные сигналы ортогональных поляризаций с минимизированными кросс-составляющими этих сигналов. При временных изменениях поляризаций приходящих волн, как линейных, так и вращающихся, соответственно изменяется дифференциальный фазовый сдвиг фазовращателей ФВ1 и ФВ2 в обоих УПС. Технический результат: обеспечение в следящих зеркальных антеннах стабилизации угловой зависимости сигнала ошибки и минимизации кросс-поляризационных составляющих сигналов на выходах канала приема при любых поляризациях приходящих сигналов, а также уменьшение габаритных размеров и массы облучающей системы. 2 ил.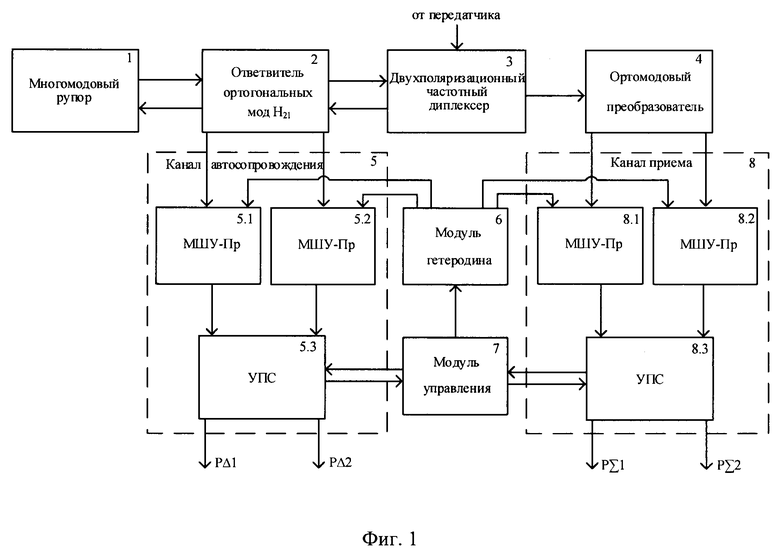
Облучающая система следящей зеркальной антенны, состоящая из многомодового рупора, ответвителя ортогональных мод Н21, двухполяризационного частотного диплексера, ортомодового преобразователя, канала автосопровождения, канала приема, модуля гетеродина и модуля управления, отличающаяся тем, что к выходам ответвителя ортогональных мод Н21 присоединены малошумящие усилители-частотные преобразователи, соединенные со входами устройства поляризационного согласования, а к синфазным выходам ортомодового преобразователя также присоединены малошумящие усилители-частотные преобразователи, соединенные со входами устройства поляризационного согласования, при этом оба устройства поляризационного согласования имеют идентичное построение и образованы тремя каскадно-соединенными квадратурными направленными ответвителями с регулируемыми связями, между первым и вторым квадратурными направленными ответвителями - в виде перестраиваемых дифференциальных фазовращателей, между вторым и третьим квадратурными направленными ответвителями - в виде коммутируемых фазовращателей 0↔π/2, при этом малошумящие усилители-частотные преобразователи осуществляют когерентное частотное преобразование сигналов с гетеродинными сигналами, поступающими от четырехканального модуля гетеродина с независимой регулировкой фазы гетеродинных сигналов в каждом канале, а согласование поляризаций приходящих сигналов в канале автосопровождения и канале приема производится одновременно изменением состояний всех перестраиваемых дифференциальных фазовращателей обоих устройств поляризационного согласования по единым командам, формируемым модулем управления по измеренным отношениям уровня кросс-поляризационной составляющей сигнала к уровню сигнала на основной поляризации.
| Двухдиапазонный облучатель с комбинированным преобразователем мод | 2018 |
|
RU2680424C1 |
| ОБЛУЧАТЕЛЬ ЗЕРКАЛЬНОЙ АНТЕННЫ | 1990 |
|
RU2054214C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДОПУСКАЕМОГО ДАВЛЕНИЯ НА ГРУНТ | 1928 |
|
SU11614A1 |
| ОБЛУЧАТЕЛЬ ЗЕРКАЛЬНОЙ АНТЕННЫ | 1991 |
|
RU2032256C1 |
| АНТЕННО-ФИДЕРНОЕ УСТРОЙСТВО И АНТЕННА, ВХОДЯЩАЯ В СОСТАВ ЭТОГО УСТРОЙСТВА | 2005 |
|
RU2296397C2 |
| US 6005528 A1, 21.12.1999. | |||
