ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к методике измерения в системе радиосвязи.
УРОВЕНЬ ТЕХНИКИ
[0002] Для улучшения еМТС в LTE версии 15 обсуждалось сокращение времени сбора данных системой. В это время возникла проблема, связанная с тем, что повторное обнаружение PSS/SSS требует времени, когда пользовательский терминал ресинхронизирует время и частоту. Кроме того, обсуждались усовершенствования PSS/SSS и сигналы для ресинхронизации. В результате в версии 15 была введена поддержка сигнала для ресинхронизации, называемого сигналом ресинхронизации (RSS, от англ. resynchronization signal).
[0003] В версии 16 дополнительно обсуждались усовершенствования еМТС, и, в качестве одного из усовершенствований, исследовались измерения на основе RSS.
ДОКУМЕНТЫ СООТВЕТСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
НЕПАТЕНТНЫЕ ДОКУМЕНТЫ
[0004]
[Непатентный документ 1] 3GPP TS 36.213 V15.6.0 (2019-06)
[Непатентный документ 2] 3GPP TS 36.331 V15.6.0 (2019-06)
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
ПРОБЛЕМА, РЕШАЕМАЯ С ПОМОЩЬЮ ИЗОБРЕТЕНИЯ
[0005] Предполагая, что пользовательский терминал измеряет RSRP (принимаемую мощность, англ. received power) RSS, передаваемого из соседней соты, желательно, чтобы пользовательский терминал получал информацию о частотно-временном положении RSS соседней соты от аппарата базовой станции обслуживающей соты.
[0006] Как описано выше, когда информация о частотно-временном положении RSS соседней соты принимается от аппарата базовой станции обслуживающей соты, возникает проблема, связанная с увеличением системных затраты (расходов) на передачу сигналов.
[0007] С учетом вышеизложенного, целью настоящего изобретения является обеспечение способа, который уменьшает системные затраты на передачу сигналов, требуемые, когда пользовательский терминал выполняет измерение с использованием сигнала ресинхронизации соседней соты.
СРЕДСТВА ДЛЯ РЕШЕНИЯ ПРОБЛЕМЫ
[0008] Согласно раскрытой методике, терминал включает в себя контроллер, выполненный с возможностью определения потенциального положения ресурса, в котором вероятно передается сигнал ресинхронизации соседней соты, на основе информации о соседней соте; и приемник, выполненный с возможностью приема сигнала ресинхронизации соседней соты на основе потенциального положения ресурса.
ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0009] Согласно изобретению, можно обеспечить методику, которая уменьшает системные затраты на передачу сигналов, требуемые, когда пользовательский терминал выполняет измерение с использованием сигнала ресинхронизации соседней соты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] На фиг. 1 представлена схема, иллюстрирующая систему радиосвязи в соответствии с вариантом осуществления настоящего изобретения;
На фиг. 2 представлена схема, иллюстрирующая систему радиосвязи в соответствии с вариантом осуществления настоящего изобретения;
На фиг. 3 представлена схема, иллюстрирующая конфигурацию RSS;
На фиг. 4 представлена схема, иллюстрирующая пример основной операции;
На фиг. 5 представлена схема, иллюстрирующая пример информации настройки RSS;
На фиг. 6 представлена схема, иллюстрирующая примеры положений RSS в частотном направлении;
На фиг. 7 представлена схема, иллюстрирующая проблему в соответствии с примером 1;
На фиг. 8 представлена схема, иллюстрирующая пример положений RSS в соответствии с примером 1-1;
На фиг. 9 представлена схема, иллюстрирующая пример положений RSS в соответствии с примером 1-1;
На фиг. 10 представлена схема, иллюстрирующая примерную операцию в соответствии с примером 1-1;
На фиг. 11 представлена схема, иллюстрирующая примерную операцию в соответствии с примером 1-2;
На фиг. 12 представлена схема, иллюстрирующая пример положений RSS в соответствии с примером 1-2;
На фиг. 13 представлена схема, иллюстрирующая пример для указания положений RSS в соответствии с примером 1-3;
На фиг. 14 представлена схема, иллюстрирующая пример положений RSS в соответствии с примером 1-3;
На фиг. 15 представлена схема, иллюстрирующая примерную операцию в соответствии с примером 2;
На фиг. 16 представлена схема, иллюстрирующая примерную операцию в соответствии с примером 2;
На фиг. 17 представлена схема, иллюстрирующая примерную операцию в соответствии с примером 3-1;
На фиг. 18 представлена схема, иллюстрирующая примерную операцию в соответствии с примером 3-2;
На фиг. 19 представлена схема, иллюстрирующая примерную операцию в соответствии с примером 3-3;
На фиг. 20 представлена схема, иллюстрирующая пример функциональной конфигурации аппарата 10 базовой станции в соответствии с вариантом осуществления настоящего изобретения;
На фиг. 21 представлена схема, иллюстрирующая пример функциональной конфигурации пользовательского терминала 20 в соответствии с вариантом осуществления настоящего изобретения; и
На фиг. 22 представлена схема, иллюстрирующая пример аппаратной структуры аппарата 10 базовой станции или пользовательского терминала 20 в соответствии с вариантом осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0011] Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на чертежи. Следует отметить, что варианты осуществления, описанные ниже, являются просто примерами, и варианты осуществления, к которым применяется настоящее изобретение, не ограничиваются нижеследующими вариантами осуществления.
[0012] Существующая технология может быть использована по мере необходимости, когда функционирует система радиосвязи в соответствии с вариантами осуществления настоящего изобретения. Существующая технология может представлять собой LTE или NR; однако существующая технология не ограничивается LTE или NR. Настоящее изобретение может быть применено к любой системе радиосвязи.
[0013] Кроме того, в вариантах осуществления схема дуплексной связи может быть схемой дуплексной связи с временным разделением (TDD, от англ. time division duplex), схемой дуплексной связи с частотным разделением (FDD, от англ. frequency division duplex) или любой другой схемой (такой как гибкая дуплексная связь).
[0014] Кроме того, сигнал ресинхронизации (RSS) будет описан в примерах 1-3; однако к примерам 1-3 могут быть применены другие сигналы. Сигнал ресинхронизации может быть заменен другим сигналом (например, сигналом синхронизации).
[0015]
(Конфигурация системы)
[0016] На фиг. 1 представлена схема, иллюстрирующая систему радиосвязи в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 1, система радиосвязи включает в себя аппарат 10 базовой станции и пользовательский терминал 20. Один аппарат 10 базовой станции и один пользовательский терминал 20, показанные на фиг. 1, являются просто примерами, и может быть предусмотрено множество аппаратов 10 базовой станции и множество пользовательских терминалов 20.
[0017] Например, аппарат 10 базовой станции может предоставлять обслуживающую соту (которая также может называться собственной сотой) для пользовательского терминала 20, и одна или более соседних сот, расположенных вблизи обслуживающей соты, могут быть сконфигурированы одним или более другими аппаратами базовой станции. Пользовательский терминал 20 может называться "терминалом".
[0018] Аппарат 10 базовой станции представляет собой устройство связи, которое предоставляет одну или более сот и осуществляет беспроводную связь с пользовательским терминалом 20. Физические ресурсы беспроводного сигнала определяются временной областью и частотной областью, временная область может быть определена субкадрами или слотами или символами OFDM, а частотная область может быть определена в поддиапазонах, поднесущих или ресурсных блоках.
[0019] Как показано на фиг. 1, аппарат 10 базовой станции передает информацию или данные управления в пользовательский терминал 20 по нисходящей линии связи (DL, англ. downlink) и принимает информацию или данные управления от пользовательского терминала 20 по восходящей линии связи (UL, англ. uplink). Как аппарат 10 базовой станции, так и пользовательский терминал 20 могут передавать и принимать сигналы путем применения формирования луча. Кроме того, как аппарат 10 базовой станции, так и пользовательский терминал 20 могут применять связь с множественным входом и множественным выходом (MIMO, от англ. multiple-input multiple-output) для нисходящей или восходящей линий связи. Аппарат 10 базовой станции и пользовательский терминал 20 могут обмениваться данными как через вторичную соту (SCell, от англ. secondary cell), так и через первичную соту (PCell, от англ. primary cell) при агрегировании несущих (СА, от англ. carrier aggregation).
[0020] Пользовательский терминал 20 представляет собой аппарат связи, оснащенный функцией беспроводной связи, такой как смартфон, планшет, носимое устройство или модуль связи для М2М (межмашинная связь, англ. Machine-to-Machine). Как показано на фиг. 1, пользовательский терминал 20 использует различные услуги связи, предоставляемые системой радиосвязи, путем приема информации или данных управления от аппарата 10 базовой станции в нисходящей линии связи и передачи информации или данных управления в аппарат 10 базовой станции в восходящей линии связи. Предполагается, что пользовательский терминал 20 в соответствии с настоящим вариантом осуществления представляет собой терминал, имеющий уменьшенную полезную полосу пропускания, соответствующую NB-IoT или еМТС; однако настоящее изобретение этим не ограничивается.
[0021] На фиг. 2 проиллюстрирован пример конфигурации системы радиосвязи, в которой выполняется NR-DC (двойное соединение NR, от англ. NR-Dual connectivity). Как показано на фиг. 2, предусмотрен аппарат 10А базовой станции, служащий в качестве главного узла (MN, от англ. master node), и аппарат 10В базовой станции, служащий в качестве вторичного узла (SN, от англ. secondary Node). Аппарат 10А базовой станции и аппарат 10В базовой станции подключены к базовой сети. Пользовательский терминал 20 осуществляет связь как с аппаратом 10А базовой станции, так и с аппаратом 10В базовой станции.
[0022] Группа сот, предоставляемая аппаратом 10А базовой станции, служащим в качестве MN, упоминается как главная группа сот (MCG, от англ. master cell group), а группа сот, предоставляемая аппаратом 10В базовой станции, служащим в качестве SN, упоминается как вторичная группа сот (SCG, от англ. secondary cell group). Операции, описанные в примерах 1-3 ниже, могут быть выполнены в любой из конфигураций, показанных на фиг. 1 и фиг. 2.
(RSS)
[0023] В настоящем варианте осуществления RSS передается от каждого из аппарата 10 базовой станции обслуживающей соты и аппаратов базовой станции одной или более соседних сот.
[0024] Последовательность RSS генерируется на основе последовательности Голда. RSS отображается на два физических ресурсных блока (2PRB, от англ. two physical resource blocks) с помощью модуляции QPSK.
[0025] Частотное положение RSS является конфигурируемым и указывается из аппарата 10 базовой станции в пользовательский терминал 20 посредством системной информации (SIB). В частности, RSS может быть размещен в двух последовательных PRB в полосе частот системы LTE, и указывается положение самого нижнего PRB.
[0026] Периодичность передачи, временное смещение и длительность времени передачи RSS также являются конфигурируемыми и указываются из аппарата 10 базовой станции в пользовательский терминал 20 посредством системной информации (SIB). В частности, периодичность передачи выбирается из 160, 320, 640 и 1280 мс, а гранулярность временного смещения определяется периодичностью (1 кадр, 2 кадра или 4 кадра). Длительность передачи выбирается из 8, 16, 32 и 40 мс. На фиг. 3 показан пример конфигурации RSS с длительностью времени 40 мс.
[0027] Как видно из фиг. 3, для RSS количество частотно-временных ресурсов велико по сравнению с PSS/SSS, и пользовательский терминал 20 может получить частотно-временную синхронизацию с аппаратом 10 базовой станции за короткий период времени. Как описано в Непатентном документе 1, 4.1 Поиск соты, "Для BL/CE UE, если UE сконфигурировано с параметром высокого уровня RSS-Config, UE может использовать сигнал ресинхронизации (как определено в [3]) для повторного получения временной и частотной синхронизации с сотой.", пользовательский терминал 20 может использовать RSS для временной и частотной ресинхронизации.
[0028] В настоящем варианте осуществления RSS используются не только для частотно-временной синхронизации, но также и для измерения. Например, пользовательский терминал 20 принимает RSS и измеряет RSRP (принимаемую мощность) или RSRQ (принимаемое качество).
[0029] Например, в состоянии ожидания RRC (RRC-Idle) пользовательский терминал 20 определяет повторный выбор соты (переключение соты) на основе принимаемой мощности, измеренной с использованием RSS обслуживающей соты, и принимаемой мощности, измеренной с использованием RSS каждой из одной или более соседних сот.
[0030] Например, в состоянии подключения RRC (RRC-Connected), пользовательский терминал 20 указывает принимаемую мощность, измеренную с использованием RSS обслуживающей соты, и принимаемую мощность, измеренную с использованием RSS каждой из одной или более соседних сот, в аппарат 10 базовой станции, и аппарат 10 базовой станции определяет то, следует ли побуждать пользовательский терминал 20 выполнять переключение (англ. handover). Например, измеренная величина RSS в дальнейшем упоминается как принимаемая мощность, но измеренная величина RSS может упоминаться как принимаемое качество.
[0031] Для того, чтобы пользовательский терминал 20 мог измерять принимаемую мощность RSS, передаваемого из каждой из одной или более соседних сот, желательно, чтобы пользовательский терминал 20 знал положение частотно-временного ресурса (далее именуемое частотно-временным положением, для удобства описания) RSS, передаваемого из каждой из одной или нескольких соседних сот. С учетом вышеизложенного, в настоящем варианте осуществления аппарат 10 базовой станции, который служит в качестве обслуживающей соты, может передавать параметры, указывающие частотно-временное положение для каждой из соседних сот, в пользовательский терминал 20 посредством сообщения RRC (такого как системная информация). В частности, могут быть переданы, например, следующие параметры.
[0032]
⋅ Ce-rss-periodicity-config: периодичность RSS {160, 320, 640, 1280}мс
⋅ Ce-rss-duration-config: длительность RSS {8, 16, 32, 40} субкадров
⋅ Ce-rss-freqPos-config: частотное положение RSS (наименьший номер физического ресурсного блока)
⋅ Ce-rss-timeOffset-config: временное смещение RSS в ряду радиокадров
⋅ Ce-rss-PowerBoost-config: смещение мощности RSS относительно LTE CRS {0, 3, 4,8, 6} дБ
Однако, если подробная информация, указывающая частотно-временное положение для каждой из соседних сот, указывается из аппарата 10 базовой станции в пользовательский терминал 20, количество сигналов будет увеличиваться. Следовательно, количество частотно-временных положений RSS может быть ограничено. Например, "временное смещение RSS и частотное положение RSS" могут быть определены как функция идентификатора соты.
(Пример основной операции)
[0033] На фиг. 4 представлена схема, иллюстрирующая пример основной операции в соответствии с настоящим вариантом осуществления (включая примеры 1-3). На фиг. 4 аппарат 10А базовой станции представляет собой аппарат базовой станции обслуживающей соты пользовательского терминала 20, а аппарат 10В базовой станции представляет собой аппарат базовой станции соседней соты. В то время как может быть множество соседних сот, на фиг. 4 проиллюстрирован один аппарат базовой станции одной соседней соты для удобства описания.
[0034] На этапе S1 пользовательский терминал 20 принимает сообщение RRC (такое как системная информация), включающее в себя информацию о конфигурации частотно-временного положения RSS обслуживающей соты от аппарата 10 базовой станции. Как описано в примерах 1-3 ниже, сообщение RRC может включать в себя информацию о положении RSS соседней соты во временной области или частотной области. Информация о положении RSS соседней соты во временной области или частотной области может передаваться посредством сообщения RRC, которое отличается от сообщения RRC, указывающего информацию о конфигурации частотно-временного положения RSS обслуживающей соты.
[0035] На фиг. 5 проиллюстрирован пример информации о конфигурации частотно-временного положения RCC обслуживающей соты (извлеченной из Непатентного документа 2). На фиг. 6 проиллюстрированы возможные положения RSS в частотной области, когда полоса пропускания системы составляет 20 МГц. На фиг. 6 показано, что существует 99 возможных положений RSS от 0 до 98.
[0036] На этапе S2 по фиг. 4 пользовательский терминал 20 определяет временное и частотное положение (или может определять временной и частотный диапазон) RSS соседней соты. На этапе S3 пользовательский терминал 20 принимает RSS соседней соты и измеряет мощность принятого RSS.
[0037] На фиг. 4 представлена схема, которая фокусируется на измерении на основе RSS для соседней соты. Таким образом, проиллюстрировано измерение на основе RSS для соседней соты. Однако пользовательский терминал 20 может выполнять измерение на основе RSS для соседней соты в дополнение к измерению на основе RSS для обслуживающей соты.
[0038] На фиг. 4 пользовательский терминал 20 может находиться в состоянии ожидания RRC или в состоянии подключения RRC во время измерения для соседней соты.
[0039] В следующих примерах 1-3 будут описаны более подробные примеры операций. Пример 1, пример 2 и пример 3 могут быть реализованы в любой комбинации.
(Пример 1)
[0040] Как показано на фиг. 6, положения частотных ресурсов RSS (частотные положения) могут быть сконфигурированы соответствующим образом в полосе пропускания системы LTE, и возможна конфигурация, индивидуальная для соты.
[0041] Однако, когда предполагаются такие частотные положения RSS, может существовать вероятность того, что RSS соседней соты может выходить за пределы частотного диапазона, который может отслеживаться пользовательским терминалом 20, когда предполагается измерение на основе RSS для соседней соты.
[0042] В таком случае пользовательский терминал 20 не сможет одновременно отслеживать RSS обслуживающей соты и RSS соседней соты или RSS множества соседних сот. Следовательно, может существовать вероятность того, что пользовательский терминал 20 может быть вынужден выполнять измерения по нескольким периодичностям RSS, что увеличивает нагрузку измерения.
[0043] На фиг. 7 проиллюстрирован пример, в котором RSS соседних сот выходят за пределы частотного диапазона, который может отслеживаться пользовательским терминалом 20. В примере на фиг. 7 пользовательский терминал 20 может отслеживать полосу пропускания 6 RB. Как показано на фиг. 7, как RSS соседней соты А, так и RSS соседней соты В находятся за пределами частотного диапазона, который может отслеживаться пользовательским терминалом 20. В этом случае, например, пользовательский терминал 20 может быть неспособен отслеживать RSS соседней соты А и RSS соседней соты В. Альтернативно, пользовательскому терминалу 20 может потребоваться сместить частотный диапазон (6RB) таким образом, чтобы можно было отслеживать RSS соседней соты А и RSS соседней соты В. Такая операция может увеличить нагрузку.
[0044] Соответственно, в примере 1 аппарат 20 базовой станции явно или неявно передает в пользовательский терминал 20 информацию, указывающую, близко ли частотное положение RSS соседней соты к частотному положению (заданному RSS-config) RSS обслуживающей соты. Поскольку пользовательский терминал 20 может понимать, что частотное положение RSS соседней соты близко к частотному положению RSS обслуживающей соты на основе указанной информации, пользовательский терминал 20 может отслеживать RSS соседней соты с меньшей нагрузкой. В примере 1, с точки зрения аппарата базовой станции, предполагается, что RSS соседних сот размещены в определенном частотном диапазоне.
[0045] В частности, описаны примеры 1-1 - 1-3. В следующих примерах 1-1 - 1-3 указана только одна соседняя сота, но количество соседних сот может быть двумя или более.
<Пример 1-1>
[0046] В примере 1-1 аппарат 10 базовой станции указывает в пользовательский терминал 20 информацию, указывающую, является ли частотное положение RSS соседней соты общим (таким же, как) с частотным положением RSS обслуживающей соты, или информацию, указывающую, находятся частотное положение RSS соседней соты и частотное положение RSS обслуживающей соты в пределах определенного частотного диапазона.
[0047] Вышеописанная информация может быть передана вместе с информацией о конфигурации RSS обслуживающей соты на этапе S1 на фиг. 4, или может быть передана в момент времени, отличный от S1 на фиг. 4. Кроме того, вышеописанная информация может быть передана посредством любого из сообщения RRC, MAC СЕ и DCI. Описанная выше информация может включать в себя идентификационную информацию для идентификации соседней соты (такую как идентификатор соседней соты). Идентификационная информация позволяет пользовательскому терминалу 20 понимать, из какой соседней соты пользовательский терминал 20 принимает RSS. Следует отметить, что идентификатор соты может быть получен из последовательности RSS.
[0048] На фиг. 8 проиллюстрирован пример частотно-временных положений RSS в случае, когда аппарат 10 базовой станции передает в пользовательский терминал 20 информацию, указывающую, что частотное положение RSS соседней соты является общим (таким же, как) с частотным положением RSS обслуживающей соты. Горизонтальная ось представляет время и, в частности, представляет временное смещение. То есть сигналы RSS передаются периодически в проиллюстрированных временных положениях.
[0049] Пользовательский терминал 20 знает частотно-временное положение (которое может отслеживаться пользовательским терминалом 20) RSS обслуживающей соты с помощью RSS-Config. Следовательно, пользовательский терминал 20 может принимать RSS соседней соты в частотном положении, таком же, как у обслуживающей соты, для измерения.
[0050] Например, временное положение RSS соседней соты указывается из аппарата 10 базовой станции в пользовательский терминал 20. Пользовательский терминал 20 может вслепую обнаруживать RSS соседней соты, предполагая, что временное положение RSS соседней соты близко или совпадает с временным положением RSS обслуживающей соты.
[0051] На фиг. 9 проиллюстрирован пример частотно-временных положений RSS в случае, когда аппарат 10 базовой станции передает в пользовательский терминал 20 информацию, указывающую, что частотное положение RSS соседней соты и частотное положение RSS обслуживающей соты находятся в пределах определенного частотного диапазона. Пример на фиг. 9 показывает, что частотное положение RSS соседней соты и частотное положение RSS обслуживающей соты находятся в частотном диапазоне А. Частотный диапазон А может представлять собой полосу пропускания, которая может отслеживаться пользовательским терминалом 20.
[0052] Пользовательский терминал 20 знает частотно-временное положение (которое может отслеживаться пользовательским терминалом 20) RSS обслуживающей соты с помощью RSS-Config. Следовательно, например, пользовательский терминал 20 может выполнять слепое обнаружение и принимать и измерять RSS соседней соты в частотном положении в частотном диапазоне А, где присутствует частотное положение RSS обслуживающей соты.
[0053] Например, положение временного ресурса (временное положение) RSS соседней соты указывается из аппарата 10 базовой станции в пользовательский терминал 20. Пользовательский терминал 20 может вслепую обнаруживать RSS соседней соты, предполагая, что временное положение RSS соседней соты близко или совпадает с временным положением RSS обслуживающей соты.
[0054] Альтернативно, без вышеописанной информации, пользовательский терминал 20 может изменять операцию в зависимости от того, синхронизированы ли по времени обслуживающая сота и соседняя сота. Пример операции, выполняемой пользовательским терминалом 20, будет описан со ссылкой на блок-схему, проиллюстрированную на фиг. 10. Предполагается, что соседняя сота обнаружена, например, посредством PSS/SSS соседней соты.
[0055] На этапе S101 пользовательский терминал 20 определяет, синхронизированы или нет по времени обслуживающая сота и соседняя сота. Временная синхронизация может быть определена на основе того, представляют ли режим мультиплексирования обслуживающей соты и режим мультиплексирования соседней соты режимом TDD. Когда и режим мультиплексирования обслуживающей соты, и режим мультиплексирования соседней соты являются TDD, определяют, что обслуживающая сота и соседняя сота синхронизированы по времени.
[0056] Когда результат определения на этапе S101 представляет собой "да" (когда определено, что обслуживающая сота и соседняя сота синхронизированы по времени), пользовательский терминал 20 принимает RSS соседней соты и выполняет измерение на этапе S102, предполагая, что частотное положение RSS соседней соты и частотное положение RSS обслуживающей соты находится в пределах определенного частотного диапазона. На этапе S102 пользовательский терминал 20 может выполнять измерение, предполагая, что частотное положение RSS соседней соты совпадает с частотным положением RSS обслуживающей соты.
[0057] Когда результат определения на этапе S101 представляет собой "нет" (когда определено, что обслуживающая сота и соседняя сота не синхронизированы по времени), пользовательский терминал 20 использует информацию о частотно-временном положении соседней соты, принятую от аппарата 10 базовой станции, для измерения RSS соседней соты на этапе S103. Например, пользовательский терминал 20 определяет, что обслуживающая сота и соседняя сота не синхронизированы по времени, когда режим мультиплексирования одной из обслуживающей соты и соседней соты является режимом FDD.
[0058] Когда выполняется операция, показанная на фиг. 10, аппарат 10 базовой станции передает подробную информацию о частотно-временном положении соседней соты, которая не синхронизирована по времени с сотой аппарата 10 базовой станции, посредством сообщения RRC или т.п., и не передает подробную информацию о частотно-временном положении соседней соты, которая синхронизирована по времени с собственной сотой аппарата 10 базовой станции. Однако настоящий вариант осуществления не ограничивается вышеописанной операцией.
<Пример 1-2>
[0059] В примере 1-2 аппарат 10 базовой станции указывает информацию о временном положении RSS соседней соты в пользовательский терминал 20. На основе указанной информации пользовательский терминал 20 определяет, является ли частотное положение RSS соседней соты общим для частотного положения RSS обслуживающей соты, или определяет, находятся ли частотное положение RSS соседней соты и частотное положение RSS обслуживающей соты в пределах определенного частотного диапазона. То есть, в примере 1-2 пользовательскому терминалу 20 указывается, является ли частотное положение RSS обслуживающей соты общим для частотного положения RSS соседней соты, или неявно указывается, находятся ли частотное положение RSS обслуживающей соты и частотное положение RSS соседней соты в определенном частотном диапазоне.
[0060] Например, информация о временном положении RSS соседней соты может быть информацией, указывающей, присутствуют ли RSS обслуживающей соты и RSS соседней соты в одном и том же временном положении. "Одинаковое временное положение" может означать, что и смещение, и периодичность одинаковы между RSS обслуживающей соты и RSS соседней соты, или может означать, что смещение одинаковое, а периодичность различна между RSS обслуживающей соты и RSS соседней соты.
[0061] На фиг. 11 показан пример операции в соответствии с примером 1-2. Как показано на фиг. 11, на этапе S201 аппарат 10 базовой станции передает информацию о временном положении RSS соседней соты в пользовательский терминал 20. На этапе S201 указанная информация может передаваться в то же время, когда информация о конфигурации RSS обслуживающей соты передается на этапе S1 на фиг. 4. Альтернативно, информация может быть передана в другое время, отличное от S1 на фиг. 4. Кроме того, вышеописанная информация может быть передана посредством любого из сообщения RRC, MAC СЕ и DCI. Информация о временном положении RSS соседней соты может включать в себя идентификационную информацию для идентификации соседней соты (такую как идентификатор соседней соты).
[0062] На этапе S202 пользовательский терминал 20 определяет частотное положение RSS соседней соты на основе информации, принятой на этапе S201.
[0063] Например, если информация о временном положении RSS соседней соты указывает, что RSS обслуживающей соты и RSS соседней соты присутствуют в одном и том же временном положении, пользовательский терминал 20 определяет, что частотное положение RSS соседней соты и частотное положение RSS обслуживающей соты находится в определенном частотном диапазоне, как показано на фиг. 12.
[0064] На этапе S203 пользовательский терминал 20 принимает RSS соседней соты на основе определения, сделанного на этапе S202, и выполняет измерение. Например, на этапе S201, когда информация о временном положении RSS соседней соты указывает, что RSS обслуживающей соты и RSS соседней соты присутствуют в одном и том же временном положении, пользовательский терминал 20 принимает RSS соседней соты и выполняет измерение во временном положении RSS обслуживающей соты в пределах определенного частотного диапазона.
[0065] В приведенном выше примере, когда принимается информация о временном положении, частотное положение предполагается. Однако для временного положения может быть определено, что временное положение RSS соседней соты и временное положение RSS обслуживающей соты находятся в пределах заданного диапазона.
[0066] Далее будет описан пример 1-3. Пример 1-3 включает в себя первый пример и второй пример.
<Первый пример примера 1-3>
[0067] В первом примере примера 1-3 аппарат 10 базовой станции указывает (конфигурирует) в (для) пользовательский терминал 20 частотное положение RSS обслуживающей соты и частотное положение RSS соседней соты. Частотное положение RSS соседней соты является относительным положением относительно частотного положения RSS обслуживающей соты. Поскольку частотное положение RSS соседней соты может быть задано как относительное положение относительно частотного положения RSS обслуживающей соты, предполагается, что частотное положение RSS соседней соты близко к частотному положению RSS обслуживающей соты.
[0068] Описанная выше информация может быть передана вместе с информацией о конфигурации RSS обслуживающей соты на этапе S1 на фиг. 4. Альтернативно, информация может быть передана в другое время, отличное от S1 на фиг. 4. Кроме того, вместо существующей информации RSS-Config, информация, описанная в примере 1-3, может быть передана вместе с информацией о конфигурации RSS обслуживающей соты на этапе S1 на фиг. 4.
[0069] Кроме того, вышеописанная информация может быть передана посредством любого из сообщения RRC, MAC СЕ и DCI. Описанная выше информация может включать в себя идентификационную информацию для идентификации соседней соты (такую как идентификатор соседней соты).
[0070] Когда аппарат 10 базовой станции передает частотное положение (обозначенное как F1) RSS обслуживающей соты и относительное положение (обозначенное как ΔF) относительно частотного положения RSS обслуживающей соты в пользовательский терминал 20, F1 и ΔF могут представлять собой отдельные элементы информации (например, отдельные индексы), или F1 и ΔF могут быть совместно закодированы.
[0071] Например, если F1 и ΔF представляют собой отдельную информацию, F1 может быть указано как 34 (например, положение, указанное номером RB), a ΔF может быть указано как 3 (что означает, что ΔF отделено от F1 на 3RB). Например, если F1 и ΔF закодированы совместно, например, может быть указан один индекс (например, двоичное число 11011). Индекс может, например, быть таким, что 3 бита старшего порядка (например, 110) представляют F1, а 2 бита младшего порядка (например, 11) представляют ΔF. Другими словами, частотное положение может быть задано с разными разрешениями между обслуживающей сотой и соседней сотой.
[0072] Когда пользовательский терминал 20 принимает частотное положение (F1) RSS обслуживающей соты и относительное положение (ΔF) относительно частотного положения (F1), пользовательский терминал 20 определяет частотное положение RSS соседней соты, как показано на фиг. 13. В примере на фиг. 13 частотное положение RSS соседней соты может быть выражено как F2=F1+ΔF.
[0073] В примере 1-3 пользовательский терминал 20 может изменять операцию в зависимости от того, синхронизированы ли по времени обслуживающая сота и соседняя сота, как в примере 1-1.
[0074] Например, когда определено, что обслуживающая сота и соседняя сота синхронизированы по времени, пользовательский терминал 20 ожидает приема F1 и ΔF от аппарата 10 базовой станции. Затем пользовательский терминал 20 принимает F1 и ΔF, определяет частотное положение RSS соседней соты и измеряет RSS соседней соты.
[0075] Когда определено, что обслуживающая сота и соседняя сота не синхронизированы по времени, пользовательский терминал 20 предполагает, что пользовательский терминал 20 не принимает F1 и ΔF от аппарата 10 базовой станции, и измеряет RSS соседней соты, используя подробную информацию о временно-частотном положении соседней соты, принятую от аппарата 10 базовой станции.
[0076] Когда и режим мультиплексирования обслуживающей соты, и режим мультиплексирования соседней соты представляют собой TDD, могут определять, что обслуживающая сота и соседняя сота синхронизированы по времени. Наоборот, когда и режим мультиплексирования обслуживающей соты, и режим мультиплексирования соседней соты представляют собой не TDD, могут определять, что обслуживающая сота и соседняя сота не синхронизированы по времени.
[0077] Когда определено, что обслуживающая сота и соседняя сота синхронизированы по времени, аппарат 10 базовой станции может передавать F1 и ΔF в пользовательский терминал 20. Когда определено, что обслуживающая сота и соседняя сота не синхронизированы по времени, аппарат 10 базовой станции может передавать абсолютную информацию о частотном положении соседней соты в пользовательский терминал 20.
[0078] Кроме того, когда соседняя сота и обслуживающая сота синхронизированы по времени (например, как соседняя сота, так и обслуживающая сота представляют собой TDD), и пользовательский терминал 20 определяет, что временное положение RSS соседней соты совпадает с временным положением RSS обслуживающей соты (например, принята информация, описанная в примере 1-2), пользовательский терминал 20 может принимать F1 и Δf от аппарата 10 базовой станции и может использовать F1 и ΔF для определения частотного положения RSS соседней соты.
[0079] Когда соседняя сота и обслуживающая сота не синхронизированы по времени, или временное положение RSS соседней соты не совпадает с временным положением RSS обслуживающей соты, пользовательский терминал 20 определяет частотное положение RSS соседней соты на основе абсолютной информации о частотном положении RSS соседней соты, принятой от аппарата 10 базовой станции.
[0080] Кроме того, когда соседняя сота и обслуживающая сота синхронизированы по времени (например, как соседняя сота, так и обслуживающая сота представляют собой TDD), и временное положение RSS соседней соты совпадает с временным положением RSS обслуживающей соты, аппарат 10 базовой станции задает относительное положение в качестве частотного положения RSS соседней соты путем передачи F1 и ΔF. Кроме того, когда соседняя сота и обслуживающая сота не синхронизированы по времени, или временное положение RSS соседней соты не совпадает с временным положением RSS обслуживающей соты, аппарат 10 базовой станции указывает абсолютную информацию о частотном положении RSS соседней соты пользовательскому терминалу 20. Однако, описанная выше операция, выполняемая аппаратом 10 базовой станции, является лишь примером.
[0081] Пользовательский терминал 20 может определять частотное положение (относительное положение) RSS соседней соты на основе идентификатора обслуживающей соты или на основе идентификатора соседней соты. Например, остаток, полученный путем деления идентификатора соседней соты на N (N представляет собой заранее заданное целое число), может представлять относительное положение RSS соседней соты относительно частотного положения RSS обслуживающей соты. Когда идентификатор соты используется таким образом, не требуется явно указывать относительное положение, как описано выше.
[0082] Кроме того, пользовательский терминал 20 может определять частотный диапазон, в котором присутствует частотное положение (относительное положение) RSS соседней соты, на основе идентификатора обслуживающей соты или идентификатора соседней соты. Например, остаток, полученный путем деления идентификатора соседней соты на N (N представляет собой заранее заданное целое число), может представлять частотный диапазон, в котором присутствует относительное положение RSS соседней соты относительно частотного положения RSS обслуживающей соты.
[0083] Описанный выше идентификатор соты может представлять собой PCI, локальный идентификатор или идентификатор группы. Следует отметить, что во всем описании идентификатор соты может представлять собой PCI, локальный идентификатор или идентификатор группы.
<Второй пример примера 1-3>
[0084] В приведенном выше примере было описано частотное положение RSS. Однако, вышеописанный пример может применяться к временному положению RSS. Подробности будут описаны ниже. Первый пример и второй пример примера 1-3 могут быть объединены. Временное положение, описанное ниже, может быть только смещением или как смещением, так и периодичностью. Во втором примере предполагается, что обслуживающая сота и соседняя сота синхронизированы по времени.
[0085] Во втором примере примера 1-3 аппарат 10 базовой станции указывает (конфигурирует) в (для) пользовательский терминал 20 временное положение RSS обслуживающей соты и временное положение RSS соседней соты. Временное положение RSS соседней соты является относительным положением относительно временного положения RSS обслуживающей соты. Поскольку временное положение RSS соседней соты может быть задано как относительное положение относительно временного положения RSS обслуживающей соты, предполагается, что временное положение RSS соседней соты близко к временному положению RSS обслуживающей соты. Однако, второй пример не ограничивается приведенным выше предположением.
[0086] Описанная выше информация может быть передана вместе с информацией о конфигурации RSS обслуживающей соты на этапе S1 на фиг. 4. Альтернативно, вместо существующей информации RSS-Config, вышеописанная информация может быть передана в другое время, отличное от S1 на фиг. 4. Кроме того, информация, описанная в примере 1-3, может быть передана вместе с информацией о конфигурации RSS обслуживающей соты на этапе S1 на фиг. 4.
[0087] Кроме того, вышеописанная информация может быть передана посредством любого из сообщения RRC, MAC СЕ и DCI. Описанная выше информация может включать в себя идентификационную информацию для идентификации соседней соты (такую как идентификатор соседней соты).
[0088] Когда аппарат 10 базовой станции передает временное положение (обозначенное как Т1) RSS обслуживающей соты и относительное положение (обозначенное как ΔT) относительно временного положения RSS обслуживающей соты в пользовательский терминал 20, Т1 и ΔT могут представлять собой отдельные элементы информации (например, отдельные индексы), или Т1 и ΔT могут быть совместно закодированы.
[0089] Когда пользовательский терминал 20 принимает временное положение (Т1) RSS обслуживающей соты и относительное положение (ΔT) относительно временного положения (Т1), пользовательский терминал 20 может определять временное положение RSS соседней соты, как показано на фиг. 14 (горизонтальная ось показывает время). В примере на фиг. 14 временное положение RSS соседней соты может быть выражено как Т2=Т1+ΔT.
[0090] Пользовательский терминал 20 может определять временное положение (относительное положение) RSS соседней соты на основе идентификатора обслуживающей соты или на основе идентификатора соседней соты. Например, остаток, полученный путем деления идентификатора соседней соты на N (N представляет собой заранее заданное целое число), может представлять относительное положение RSS соседней соты относительно временного положения RSS обслуживающей соты. Когда идентификатор соты используется таким образом, не требуется явно указывать относительное положение, как описано выше.
[0091] Кроме того, пользовательский терминал 20 может определять временной диапазон (который может называться потенциальным диапазоном), в котором присутствует временное положение (относительное положение) RSS соседней соты, на основе идентификатора обслуживающей соты или идентификатора соседней соты. Например, остаток, полученный путем деления идентификатора соседней соты на N (N представляет собой заранее заданное целое число), может представлять временной диапазон, в котором присутствует относительное положение RSS соседней соты относительно временного положения RSS обслуживающей соты.
[0092] Описанный выше идентификатор соты может представлять собой PCI, локальный идентификатор или идентификатор группы. Следует отметить, что во всем описании идентификатор соты может представлять собой PCI, локальный идентификатор или идентификатор группы.
[0093] В соответствии с примером 1, описанным выше, пользовательский терминал 20 может эффективно принимать сигнал ресинхронизации соседней соты.
(Пример 2)
[0094] Далее будет описан пример 2. Для того, чтобы пользовательский терминал 20 измерял RSS для каждой соседней соты, аппарат 10 базовой станции может передавать в пользовательский терминал 20 информацию (называемую вспомогательной информацией или информацией поддержки), указывающую, передает ли каждая из соседних сот RSS, и указывающую, в каком временно-частотном положении каждая из соседних сот передает RSS. В этом случае пользовательский терминал 20 может использовать вспомогательную информацию для выполнения измерений на основе RSS для соседних сот. Информация, указываемая с аппарата 10 базовой станции пользовательскому терминалу 20, описанная в примере 1, является примером вспомогательной информации.
[0095] Однако предполагается, что аппарат 10 базовой станции не создает список соседних сот и информацию о частотно-временном положении RSS каждой из соседних сот.
[0096] На фиг. 15 приведена схема, иллюстрирующая пример операции, когда используется вспомогательная информация. На этапе S301 аппарат 10 базовой станции передает вспомогательную информацию в пользовательский терминал 20. Вспомогательная информация, передаваемая на этапе S301, представляет собой информацию, которая помогает пользовательскому терминалу 20 выполнять измерения RSS для соседних сот, и включает в себя список соседних сот (например, список идентификаторов соседних сот) и информацию об измерениях RSS для соседних сот. Информация об измерениях RSS может представлять собой информацию о частотно-временных положениях RSS.
[0097] Пользовательский терминал 20, который принял вспомогательную информацию, измеряет RSS каждой из соседних сот на основе вспомогательной информации на этапе S302. Например, для данной соседней соты пользовательский терминал 20 отслеживает частотно-временное положение RSS данной соседней соты, указанное во вспомогательной информации, и принимает RSS данной соседней соты для измерения.
[0098] Вспомогательная информация может быть передана вместе с информацией о конфигурации RSS обслуживающей соты на этапе S1 на фиг. 4. Альтернативно, вспомогательная информация может быть передана в другое время, отличное от S1 на фиг. 4. Кроме того, вспомогательная информация может быть передана посредством любого из сообщения RRC, MAC СЕ и DCI.
[0099] В качестве примера, указание описанной выше вспомогательной информации может быть определено в спецификации как опция в передаче сигналов более высокого уровня, и пользовательский терминал 20 может переключать операцию, связанную с измерением RSS для данной соседней соты, между ситуацией, когда вспомогательная информация была принята, и ситуацией, когда вспомогательная информация не была принята.
[0100] На фиг. 16 представлена схема, иллюстрирующая пример вышеописанной операции переключения, выполняемой пользовательским терминалом 20. На этапе S401 пользовательский терминал 20 определяет, была ли принята вспомогательная информация посредством передачи сигналов более высокого уровня (например, системной информации) в обслуживающей соте в зоне обслуживания.
[0101] Когда пользовательский терминал 20 определяет, что вспомогательная информация была принята (да на этапе S401), пользовательский терминал 20 измеряет RSS соседней соты на основе вспомогательной информации на этапе S402.
[0102] Когда пользовательский терминал 20 определяет, что вспомогательная информация не была принята (нет на этапе S401), пользовательский терминал 20 определяет частотно-временное положение RSS на основе конечного числа шаблонов и выполняет измерение на этапе S403. Шаблоны могут представлять, например, множество потенциальных частотно-временных положений RSS и диапазон частотно-временных положений RSS. Пользовательский терминал 20 может вслепую обнаруживать RSS соседней соты на основе шаблонов. Следует отметить, что один шаблон может быть применен к множеству соседних сот, или один шаблон может быть выбран из множества шаблонов в соответствии с идентификатором соседней соты.
[0103] Вышеописанные шаблоны определены в спецификации как шаблоны, используемые только для измерений RSS соседних сот, и могут быть предварительно сконфигурированы в пользовательском терминале 20 и аппарате 10 базовой станции. Вышеуказанные шаблоны могут включать в себя любой один, два или три из следующих шаблонов (1), (2) и (3).
[0104]
(1) частотные положения RSS
(2) Длительности передачи и временные смещения RSS или субкадров, в которых может быть размещен RSS
(3) Частотный диапазон, в котором присутствуют RSS обслуживающей соты и RSS соседней соты
[0105] Если используется вышеописанный шаблон (3), предполагается, что RSS обслуживающей соты и RSS соседней соты находятся в пределах конкретного частотного диапазона. В этом случае может быть определено, что пользовательский терминал 20 отслеживает только частотный диапазон вокруг известного частотного положения RSS обслуживающей соты.
[0106] Если заданы вышеописанные шаблон 1 и шаблон 2, шаблон 1 может включать в себя "(частотное положение А1, длительность передачи А1 и временное смещение А1), (частотное положение А2, длительность передачи А2 и временное смещение А2) и (частотное положение A3, длительность передачи A3 и временное смещение A3), "и шаблон 2 может включать в себя "(частотное положение В1, длительность передачи В1 и временное смещение В1), (частотное положение В2, длительность передачи В2 и временное смещение В2), (частотное положение частоты В3, длительность передачи В и временное смещение В3)."
[0107] Кроме того, например, когда предполагается, что пользовательский терминал 20 обнаружил идентификатор соты соседней соты на основе PSS/SSS соседней соты, пользовательский терминал 20 определяет, что шаблон, соответствующий идентификатору соты, является шаблоном 1.
[0108] В этом случае пользовательский терминал 20 обнаруживает RSS соседней соты с использованием шаблона 1 и выполняет измерение. То есть пользовательский терминал 20 отслеживает RSS соседней соты в каждом из следующего: (частотное положение А1, длительность передачи А1 и временное смещение А1), (частотное положение А2, длительность передачи А2 и временное смещение А2) и (частотное положение A3, длительность передачи A3 и временное смещение A3). Затем пользовательский терминал 20 принимает RSS в частотно-временном положении, где был обнаружен RSS соседней соты, и выполняет измерение.
[0109] Альтернативно, чтобы выбрать один шаблон из множества шаблонов, шаблоны могут быть связаны с соответствующими системными полосами пропускания.
[0110] Например, шаблон 1 может быть связан с системной полосой пропускания 20 МГц, а шаблон 2 может быть связан с системной полосой пропускания 10 МГц. В этом случае, когда определено, что системная полоса пропускания обнаруженной соседней соты составляет 20 МГц на основе системной информации обнаруженной соседней соты, пользовательский терминал 20 использует шаблон 1 для отслеживания RSS обнаруженной соседней соты.
[0111] В приведенном выше примере, когда предоставляется вспомогательная информация, используется вспомогательная информация. Однако, даже когда вспомогательная информация не предоставляется, может использоваться способ, аналогичный описанному способу без вспомогательной информации.
[0112] Например, пользовательский терминал 20 и аппарат 10 базовой станции могут предполагать, что аппарат 10 базовой станции может использовать конечное число шаблонов для положений RSS. Аппарат 10 базовой станции может указывать пользовательскому терминалу 20 информацию (пример вспомогательной информации), указывающую частотно-временное положение, где фактически передается RSS, из конечного числа шаблонов. Пользовательский терминал 20 идентифицирует шаблон на основе идентификатора соты или т.п. соседней соты и принимает RSS соседней соты на основе информации и шаблона. Соответственно, нет необходимости определять частотно-временное положение из всех потенциальных положений, что снижает информационную емкость передачи сигналов.
[0113] В соответствии с примером 2, описанным выше, даже когда пользовательский терминал 20 не получает вспомогательную информацию, которая поддерживает измерение сигнала ресинхронизации соседней соты, пользовательский терминал 20 может выполнять измерение сигнала ресинхронизации соседней соты.
(Пример 3)
[0114] Далее будет описан пример 3. Как описано выше, для того, чтобы пользовательский терминал 20 измерял RSS для каждой соседней соты, аппарат 10 базовой станции может передавать в пользовательский терминал 20 информацию (вспомогательную информацию), указывающую, передает ли каждая из соседних сот RSS, а также указывающую временное и частотное положение, где каждая из соседних сот передает RSS, если RSS передается.
[0115] Когда передается вспомогательная информация, может потребоваться указать пользовательскому терминалу 20 7-битное временное и частотное положение каждой из соседних сот.
[0116] По этой причине необходимо уменьшить системные затраты на передачу сигналов, как описано выше, и, таким образом, предполагается, что потенциальные положения RSS (временные положения, частотные положения или временные и частотные положения) для измерений RSS должны быть уменьшены.
[0117] Как описано выше, предполагается, что "временное смещение RSS и частотное положение RSS" являются функцией идентификатора соты, чтобы уменьшить потенциальные положения RSS. Однако, если временное смещение RSS и частотное положение (= конфигурируются максимум 99 различными способами) определяются на основе идентификатора соты, частотно-временные положения RSS могут конфликтовать между обслуживающей сотой и соседней сотой или между соседними сотами в зависимости от комбинации идентификаторов обслуживающей соты и соседней соты или комбинации идентификаторов соседних сот. Другими словами, в зависимости от комбинации идентификаторов сот, RSS не могут быть размещены на ортогональных временных и частотных ресурсах. Подробности будут описаны ниже. Следует отметить, что "ортогональные" означает, что частотно-временные положения не перекрываются.
[0118] В качестве примера, предполагая, что сигналы RSS ортогональны друг другу между сотами только в частотном направлении, существует максимум 99 частотных положений (с системной полосой пропускания 20 МГц). Таким образом, в частотных положениях, основанных на идентификаторах сот (504 идентификатора сот), может возникнуть конфликт между сотами. То есть множество различных идентификаторов сот могут быть связаны с одним и тем же частотным положением, и частотные положения могут конфликтовать между сотами, если сигналы RSS размещаются на основе вышеупомянутого соотношения.
[0119] Предполагая, что сигналы RSS ортогональны друг другу между сотами во временном и частотном направлениях, временные положения конфигурируются в соответствии с периодами передачи и длительностями передачи сигналов RSS относительно максимум 99 частотных положений. В некоторых случаях временные и частотные положения RSS могут быть однозначно сконфигурированы путем сопоставления частотно-временных положений с идентификаторами сот (RSS могут быть размещены так, чтобы быть ортогональными друг другу между сотами).
[0120] Следующий пример 1 указывает, что сигналы RSS могут быть размещены так, чтобы быть ортогональными друг другу, а пример 2 указывает, что сигналы RSS не могут быть размещены так, чтобы быть ортогональными друг другу.
[0121] Пример 1: Для периодичности RSS 1280 мс могут быть применены 32 временных смещения с временной гранулярностью 40 мс. В этом случае можно допустить 32×99 (больше 504) ортогональных положений в направлении времени. Следовательно, для каждого идентификатора соты возможны ортогональные частотно-временные положения RSS.
[0122] Пример 2: Для периодичности RSS 160 мс могут быть применены 16 временных смещений с временной гранулярностью 10 мс. Например, когда длительность передачи RSS составляет 40 мс, можно предположить 4 шаблона временного положения, чтобы сигналы RSS не перекрывались, путем применения временных смещений в единицах 40 мс. Однако 4×99 меньше, чем 504. Следовательно, может быть случай, когда сигналы RSS не ортогональны друг другу между сотами, когда каждый идентификатор соты представляет "временное смещение и частотное положение".
[0123] Кроме того, если существует ограничение на частотный диапазон, в котором пользовательский терминал 20 может одновременно отслеживать сигналы RSS, и сигналы RSS размещены в указанном частотном диапазоне, было бы трудно предположить индивидуальные временные и частотные ресурсы для каждого идентификатора соты.
[0124] С учетом вышеизложенного, в примере 3 возможные ресурсы, которые должны отслеживаться пользовательским терминалом 20 для обнаружения соседних сот, задаются идентификаторами сот, что снижает системные затраты на передачу сигналов. Пример 3-1, пример 3-2 и пример 3-3 будут описаны ниже.
<Пример 3-1>
[0125] В примере 3-1 пользовательский терминал 20 определяет одно или более возможных частотно-временных положений для измерения RSS для соседней соты на основе любой одной, двух или трех из следующих видов информации (1), (2) и (3). С точки зрения пользовательского терминала 20 следующая информация представляет собой информацию о соседней соте.
[0126]
(1) Физический идентификатор соты (называемый идентификатором соты) или часть информации (например, локальный идентификатор);
(2) Системная полоса пропускания LTE;
(3) Периодичность RSS и временное смещение
[0127] Например, как показано на фиг. 17, временные и частотные области, представленные "А", определены в спецификации как потенциальные частотно-временные положения, в которых размещен RSS, передаваемый из соседней соты с идентификатором 1 соты. Временные и частотные области, представленные "В", определены как потенциальные частотно-временные положения, в которых размещен RSS, передаваемый из соседней соты с идентификатором 2 соты. То же самое относится и к идентификаторам 3 и 4 соты. RSS передается в заданном положении ресурса в каждом домене.
[0128] Приведенное выше описание дано с точки зрения пользовательского терминала 20. Аппарат базовой станции соседней соты передает RSS в частотно-временном положении в частотно-временной области, соответствующей идентификатору соты аппарата базовой станции.
[0129] На фиг. 17 потенциальные положения (кандидаты) представлены в виде областей, но потенциальные положения могут быть представлены в виде множества частотно-временных положений, где может передаваться RSS. Потенциальные положения, представленные в виде временных и частотных областей или множества частотно-временных положений, могут называться "частотно-временными потенциальными положениями".
[0130] Частотно-временные потенциальные положения RSS (области, множество положений и т.д.) соседних сот могут перекрываться между соседними сотами. Например, в примере, показанном на фиг. 17, домен А может быть связан с тремя сотами с идентификаторами 1, 10 и 20 соты. Не было бы никаких проблем, если бы фактически передаваемые RSS не перекрывались. Пользовательский терминал 20 может идентифицировать RSS предполагаемой соты на основе идентификатора соты, который может быть получен из принятой последовательности RSS.
[0131] С помощью описанной выше методики могут быть уменьшены системные затраты на передачу сигналов. Аппарат 10 базовой станции обслуживающей соты (или аппарат базовой станции соседней соты) может указывать пользовательскому терминалу 20 частотно-временное положение, где фактически передается RSS из соседней соты, из числа частотно-временных потенциальных положений (доменов, множества позиций или и т.п.). Как описано выше, поскольку указаны положения (относительные положения) из числа возможных положений, можно указать небольшой объем информации по сравнению с тем, когда указываются абсолютные положения.
[0132] Описанное выше указание позволяет пользовательскому терминалу 20 принимать RSS соседней соты и выполнять измерение без слепого обнаружения. Пример слепого обнаружения будет описан в примере 3-2 ниже.
[0133] Как описано выше, в то время как потенциальные положения могут быть определены по умолчанию, опциональное уведомление может быть определено в спецификации таким образом, что оператор может вручную настраивать положение RSS, и вышеописанные потенциальные положения могут быть перезаписаны. То есть, когда RSS во временных и частотных положениях, отличных от вышеописанных потенциальных положений, связанных с идентификаторами сот, передается из соседней соты, аппарат 10 базовой станции обслуживающей соты может указывать пользовательскому терминалу 20, что RSS во временных и частотных положениях, отличных от описанных выше потенциальных положений по умолчанию, передается из соседней соты.
[0134] В следующих случае 1, случае 2 и случае 3 пользовательский терминал 20 может определять частотно-временное потенциальное положение RSS для данной соседней соты на основе вышеописанной информации (1), (2) и (3).
[0135] Случай 1: Пользовательский терминал 20 определяет потенциальное временное и частотное положение (домены, множество положений и т.д.), связанное с идентификатором соседней соты. Пользовательский терминал 20 определяет потенциальное положение на основе определения в спецификации, как описано выше.
[0136] Случай 2: Только когда системная полоса пропускания LTE соседней соты составляет максимум 20 МГц, может быть применен вышеупомянутый случай 1. Если системная полоса пропускания LTE соседних сот не превышает 20 МГц, пользовательский терминал 20 может предположить, что указана информация, описанная в примере 1, или вспомогательная информация, описанная в примере 2, и может выполнять измерение.
[0137] случай 3: Только если системная полоса пропускания LTE соседней соты составляет максимум 20 МГц, или только если периодичность RSS составляет 1280 мс, а длительность передачи составляет 8 мс, может быть применен вышеупомянутый случай 1. Ни в том, ни в другом случае, например, пользовательский терминал 20 может предполагать, что указана информация, описанная в примере 1, или вспомогательная информация, описанная в примере 2, и может выполнять измерение. Следует отметить, что в приведенном выше выражении "периодичность RSS составляет 1280 мс, а длительность передачи составляет 8 мс", "8 мс" и "1280 мс" являются просто примерами.
<Пример 3-2>
[0138] В примере 3-2 пользовательский терминал 20 определяет потенциальное временное и частотное положение RSS (домены, множество положений и т.д.), как описано в примере 3-1. В примере 3-2 среди потенциальных положений, потенциальное временное и частотное положение, где фактически передается RSS, не указывается пользовательскому терминалу 20, и пользовательский терминал 20 вслепую обнаруживает RSS соседней соты. Пользовательский терминал 20 может определять RSS соседней соты на основе идентификатора соты, который может быть получен из последовательности RSS.
[0139] Если потенциальное временное и частотное положение, связанное с идентификатором соты, задано по умолчанию, и только когда RSS не размещен в потенциальном положении, аппарат 10 базовой станции может индивидуально указывать информацию о положении RSS соседней соты пользовательскому терминалу 20. Информация о положении может представлять собой конкретное временное и частотное положение или может представлять собой информацию, описанную в примере 1.
[0140] Пример операции в соответствии с примером 3-2 будет описан со ссылкой на фиг. 18. На фиг. 18 проиллюстрирован аппарат 10А базовой станции, который предоставляет обслуживающую соту для пользовательского терминала 20, и аппарат 10В базовой станции, который предоставляет соседнюю соту.
[0141] На этапе S501 сообщение RRC передается от аппарата 10А базовой станции в пользовательский терминал 20. Сообщение RRC включает в себя информацию о частотно-временном положении RSS обслуживающей соты. С помощью вышеуказанной информации пользовательский терминал 20 может измерять RSS обслуживающей соты в дополнение к RSS соседней соты, как описано ниже.
[0142] На этапе S502 пользовательский терминал 20 принимает PSS/SSS от аппарата 10 В базовой станции соседней соты и определяет идентификатор соседней соты на этапе S503. Пользовательский терминал 20 идентифицирует потенциальное частотно-временное положение RSS, связанное с идентификатором соты.
[0143] На этапе S504 пользовательский терминал 20 обнаруживает RSS соседней соты путем отслеживания вышеописанного потенциального частотно-временного положения. На этапе S505 пользовательский терминал 20 измеряет RSS соседней соты.
<Пример 3-3>
[0144] В любом из примера 1, примера 2, примера 3-1 и примера 3-2 при измерении RSS пользовательский терминал 20 может быть способен одновременно обнаруживать RSS множества соседних сот.
[0145] По этой причине в примере 3-3 количество сигналов RSS, которые могут быть одновременно обнаружены пользовательским терминалом 20 (которое может быть обозначено как количество идентификаторов сот, обнаруженных сигналами RSS), задано в спецификации. Пользовательский терминал 20 обнаруживает RSS вплоть до заданного количества RSS. Количество RSS, которые могут быть одновременно обнаружены пользовательским терминалом 20, может отличаться между состоянием ОЖИДАНИЯ RRC и состоянием ПОДКЛЮЧЕНИЯ RRC.
[0146] Вместо (или в дополнение к) задания количества сигналов RSS, которые могут быть одновременно обнаружены пользовательским терминалом 20 в спецификации, пользовательский терминал 20 может указывать в качестве возможности UE количество сигналов RSS, которые могут быть одновременно обнаружены пользовательским терминалом 20 устройству базовой станции 10, как показано на этапе S701 на фиг. 19.
[0147] В соответствии с примером 3, описанным выше, возможно уменьшить системные затраты на передачу сигналов за счет измерения сигнала ресинхронизации соседней соты пользовательским терминалом 20.
(Конфигурация устройства)
[0148] Далее будут описаны примеры функциональных конфигураций аппарата 10 базовой станции и пользовательского терминала 20, которые выполняют описанные выше процессы и операции. Аппарат 10 базовой станции и пользовательский терминал 20 включают в себя функции, описанные в вышеуказанных вариантах осуществления. Однако аппарат 10 базовой станции и пользовательский терминал 20 могут каждый включать в себя некоторые из функций, описанных в вариантах осуществления.
<Аппарат 10 базовой станции>
[0149] На фиг. 20 представлена схема, иллюстрирующая пример функциональной конфигурации аппарата 10 базовой станции. Как показано на фиг. 5, аппарат 10 базовой станции включает в себя передатчик 110, приемник 120, блок 130 настройки и контроллер 140. Функциональная конфигурация, показанная на фиг. 20, является лишь примером. До тех пор, пока могут выполняться операции в соответствии с вариантами осуществления настоящего изобретения, могут использоваться любые функциональные классификации и названия функциональных блоков.
[0150] Передатчик 110 включает в себя функцию генерирования сигнала и беспроводной передачи сигнала в пользовательский терминал 20. Приемник 120 включает в себя функцию приема различных типов сигналов, передаваемых из пользовательского терминала 20, и получения информации более высокого уровня из принятых сигналов. Кроме того, передатчик 110 включает в себя функцию для передачи NR-PSS, NR-SSS, NR-PBCH, нисходящего/восходящего сигнала управления и т.п. в пользовательский терминал 20.
[0151] Блок 130 настройки сохраняет в запоминающем устройстве предварительно сконфигурированную информацию о конфигурации и различные типы информации о конфигурации, подлежащие передаче в пользовательский терминал 20, и считывает такую информацию о настройке с запоминающего устройства по мере необходимости.
[0152] Контроллер 140 выполняет планирование нисходящего приема или восходящей передачи пользовательского терминала 20 посредством передатчика 110. Функциональный блок контроллера 140 для передачи сигналов может быть включен в состав передатчика 110, а функциональный блок контроллера 140 для приема сигналов может быть включен в состав приемника 120. Кроме того, передатчик 110 может называться устройством передачи, приемник 120 может называться устройством приема.
<Пользовательский терминал 20>
[0153] На фиг. 21 представлена схема, иллюстрирующая пример функциональной конфигурации пользовательского терминала 20. Как показано на фиг. 21, пользовательский терминал 20 включает в себя передатчик 210, приемник 220, блок 230 настройки и контроллер 240. Функциональная конфигурация, показанная на фиг. 20, является лишь примером. До тех пор, пока могут выполняться операции в соответствии с вариантами осуществления настоящего изобретения, могут использоваться любые функциональные классификации и названия функциональных блоков.
[0154] Передатчик 210 генерирует сигнал передачи из данных передачи и передает беспроводным способом сигнал передачи. Приемник 220 беспроводным способом принимает различные типы сигналов и получает сигналы более высокого уровня из принятых сигналов физического уровня. Кроме того, приемник 220 может включать в себя функцию для приема NR-PSS, NR-SSS, NR-PBCH, нисходящего/восходящего/прямого сигнала управления, DCI через PDCCH, данных через PDSCH и т.п., передаваемых от аппарата 10 базовой станции. Кроме того, в качестве связи D2D передатчик 210 может передавать физический прямой канал управления (PSCCH, от англ. physical sidelink control channel), физический прямой общий канал (PSSCH, от англ. physical sidelink shared channel), физический прямой канал обнаружения (PSDCH, от англ. physical sidelink discovery channel), физический прямой широковещательный канал (PSBCH, от англ. physical sidelink broadcast channel) и т.п. в другой пользовательский терминал 20 и может принимать PSCCH, PSSCH, PSDCH, PSBCH и т.п. из другого пользовательского терминала 20.
[0155] Блок 230 настройки сохраняет в запоминающем устройстве различные типы информации о конфигурации, принятой от аппарата 10 базовой станции или другого пользовательского терминала 20 посредством приемника 220, и считывает такую информацию о конфигурации с запоминающего устройства по мере необходимости. Кроме того, блок 230 настройки сохраняет предварительно сконфигурированную информацию о настройке.
[0156] Контроллер 240 управляет пользовательским терминалом 20. Функциональный блок контроллера 240 для передачи сигналов может быть включен в состав передатчика 210, а функциональный блок контроллера 240 для приема сигналов может быть включен в состав приемника 220. Кроме того, передатчик 210 может называться устройством передачи, а приемник 220 может называться устройством приема.
(Резюме)
[0157] В соответствии с вариантами осуществления предусмотрен терминал, как описано в каждом из пунктов 1-3.
[0158]
<Пункт 1>
(Пункт 1-1)
Терминал включает в себя приемник 220, выполненный с возможностью приема от аппарата базовой станции обслуживающей соты информации, указывающей взаимосвязь между частотным положением сигнала ресинхронизации обслуживающей соты и частотным положением сигнала ресинхронизации соседней соты, при этом приемник принимает сигнал ресинхронизации соседней соты в частотном положении на основе указанной взаимосвязи.
(Пункт 1-2)
Терминал включает в себя контроллер 240, выполненный с возможностью определения того, синхронизированы ли по времени обслуживающая сота и соседняя сота, и
приемник 220, выполненный с возможностью приема сигнала ресинхронизации соседней соты, предполагая, что частотное положение сигнала ресинхронизации обслуживающей соты и частотное положение сигнала ресинхронизации соседней соты находятся в определенной взаимосвязи в случае, когда контроллер 240 определяет, что обслуживающая сота и соседняя сота синхронизированы по времени.
(Пункт 1-3)
Терминал включает в себя приемник 220, выполненный с возможностью приема информации, указывающей временное положение сигнала ресинхронизации соседней соты от аппарата базовой станции обслуживающей соты, при этом приемник принимает сигнал ресинхронизации соседней соты, предполагая, что частотное положение или временное положение сигнала ресинхронизации обслуживающей соты и частотное положение или временное положение сигнала ресинхронизации соседней соты находятся в определенной взаимосвязи на основе указанной информации.
(Пункт 1-4)
Терминал включает в себя приемник 220, выполненный с возможностью приема от аппарата базовой станции обслуживающей соты первого положения, которое является положением сигнала ресинхронизации обслуживающей соты, и второго положения, которое является относительным положением сигнала ресинхронизации соседней соты относительно первого положения, при этом приемник принимает сигнал ресинхронизации соседней соты на основе первого положения и второго положения.
(Пункт 1-5)
Терминал согласно пункту 1-4, в котором приемник принимает первое положение и второе положение в качестве совместно закодированного значения.
(Пункт 1-6)
Аппарат базовой станции, содержащий передатчик 110, выполненный с возможностью передачи информации, указывающей взаимосвязь между частотным положением сигнала ресинхронизации обслуживающей соты и частотным положением сигнала ресинхронизации соседней соты в терминал, при этом сигнал ресинхронизации соседней соты принимается терминалом в частотном положении на основе указанного отношения.
[0159] С помощью конфигурации, описанной в любом из пунктов 1-1 - 1-6, пользовательский терминал может эффективно принимать сигнал ресинхронизации соседней соты.
[0160]
<Пункт 2>
(Пункт 2-1)
Терминал включает в себя контроллер 240, выполненный с возможностью, в случае, когда информация поддержки, поддерживающая измерение с использованием сигнала ресинхронизации соседней соты, не принимается, определять шаблон для ресурсной позиции, где сигнал ресинхронизации соседней соты вероятно передается, на основе информации соседней соты, и
приемник 220, выполненный с возможностью приема сигнала ресинхронизации соседней соты на основе указанного шаблона.
(Пункт 2-2)
Терминал согласно пункту 2-1, в котором в случае, когда принимается информация поддержки,
приемник использует информацию поддержки для приема сигнала повторной синхронизации соседней соты, или
приемник использует информацию соседней соты для определения шаблона для ресурсной позиции, где сигнал ресинхронизации соседней соты вероятно передается, на основе информации соседней соты, и использует шаблон для приема сигнала ресинхронизации соседней соты.
(Пункт 2-3)
Терминал согласно пункту 2-1 или пункту 2-2, в котором информация соседней соты представляет собой идентификатор соты или системную полосу пропускания.
(Пункт 2-4)
Терминал согласно любому из пунктов 2-1 - 2-3, в котором шаблон включает в себя потенциальное частотное положение, потенциальное временное положение или частотный диапазон сигнала ресинхронизации соседней соты.
(Пункт 2-5)
Способ приема, выполняемый терминалом. Способ приема включает в себя, в случае, когда информация поддержки, поддерживающая измерение с использованием сигнала ресинхронизации соседней соты, не принимается, этап определения шаблона для ресурсной позиции, где вероятно передается сигнал ресинхронизации соседней соты, на основе информации соседней соты, и
этап приема сигнала ресинхронизации соседней соты на основе указанного шаблона.
[0161] С помощью конфигурации, описанной в любом из пунктов 2-1 - 2-5, пользовательский терминал может выполнять измерение с использованием сигнала ресинхронизации соседней соты, даже если информация поддержки, поддерживающая измерение с использованием сигнала ресинхронизации соседней соты, не принимается.
[0162]
<Пункт 3>
(Пункт 3-1)
Терминал включает в себя контроллер 240, выполненный с возможностью определения потенциального положения ресурса, в котором вероятно передается сигнал ресинхронизации соседней соты, на основе информации о соседней соте; и
приемник 220, выполненный с возможностью приема сигнала ресинхронизации соседней соты на основе потенциального положения ресурса.
(Пункт 3-2)
Терминал согласно пункту 3-1, в котором приемник выполнен с возможностью приема сигнала ресинхронизации соседней соты на основе потенциального положения ресурса и информации, указывающей положение ресурса, в котором фактически передается сигнал ресинхронизации соседней соты.
(Пункт 3-3)
Терминал согласно пункту 3-1, в котором приемник выполнен с возможностью слепого обнаружения сигнала ресинхронизации соседней соты на основе потенциального положения ресурса.
(Пункт 3-4)
Терминал согласно любому из пунктов 3-1 - 3-3, в котором информация о соседней соте включает в себя информацию об идентификаторе соты, полосе пропускания системы или временном положении сигнала ресинхронизации.
(Пункт 3-5)
Терминал в соответствии с любым из пунктов 3-1 - 3-4, дополнительно содержащий передатчик 210, выполненный с возможностью передачи, в качестве информации о возможностях, ряда (количества) сигналов ресинхронизации, которые могут быть приняты одновременно.
[0163] С помощью конфигурации, описанной в любом из пунктов 3-1 - 3-5, возможно уменьшить системные затраты на передачу сигналов, требуемые, когда пользовательский терминал выполняет измерение с использованием сигнала ресинхронизации соседней соты.
(Конфигурация аппаратного обеспечения)
[0164] Блок-схемы (фиг. 20 и фиг. 21), используемые в приведенном выше описании вариантов осуществления, иллюстрируют блоки функциональный единиц. Эти функциональные блоки (компоненты) реализуются в любой комбинации аппаратного и/или программного обеспечения. Кроме того, средства для реализации функциональных блоков не ограничены частными случаями. Другими словами, функциональные блоки могут быть реализованы в одном физически и/или логически связанном устройстве или во множестве устройств, где два или более физически и/или логически разделенных устройства соединены непосредственно и/или опосредованно (например, проводным и/или беспроводным способом). Функциональный блок может быть реализован путем объединения программного обеспечения с описанным выше одним или более устройствами.
[0165] Функции включают в себя оценку, принятие решения, определение, вычисление, расчет, обработку, вывод, исследование, поиск, установление, прием, передачу, вывод, доступ, решение, отбор, выбор, установление, сравнение, предположение, ожидание, определение, широковещание, уведомление, связь, передачу, конфигурирование, реконфигурирование, размещение, отображение и назначение; однако функции этим не ограничиваются. Например, функциональный блок (компонент) для передачи называется блоком передачи или передатчиком. Для всех функций способы реализации не ограничены частными случаями, как описано выше.
[0166] Например, аппарат 10 базовой станции и пользовательский терминал 20 в соответствии с вариантом осуществления настоящего изобретения могут функционировать как компьютеры для выполнения процесса способа радиосвязи в соответствии с настоящим изобретением. На фиг. 22 представлена схема, иллюстрирующая аппаратную конфигурацию каждого из аппарата 10 базовой станции и пользовательского терминала 20 в соответствии с вариантом осуществления настоящего изобретения. Каждое из описанных выше аппарата 10 базовой станции и пользовательского терминала 20 может быть физически сконфигурировано как компьютер, включающий в себя процессор 1001, запоминающее устройство 1002, вспомогательное запоминающее устройство 1003, устройство 1004 связи, устройство 1005 ввода, устройство 1006 вывода и шину 1007.
[0167] В последующем описании термин "аппарат" может взаимозаменяемо пониматься как схема, устройство, блок или т.п. Аппаратная конфигурация каждого из аппарата 10 базовой станции и пользовательского терминала 20 может быть сконфигурирована таким образом, чтобы включать в себя одно или более устройств, показанных на фиг. 7 или так, чтобы не включать в себя часть устройств.
[0168] Функции аппарата 10 базовой станции и пользовательского терминала 20 реализуются путем обеспечения того, чтобы аппаратные средства, такие как процессор 1001 и запоминающее устройство 1002, считывали заданное программное обеспечение (программу), чтобы позволить процессору 1001 выполнять операции, управлять связью с помощью устройства 1004 связи и управлять по меньшей мере одним из считывания и записи данных с/на запоминающее устройство 1002 и вспомогательное запоминающее устройство 1003.
[0169] Процессор 1001 управляет всем компьютером с помощью, например, функционирования операционной системы. Процессор 1001 может быть сконфигурирован как центральный процессор (ЦП), включающий в себя интерфейс с периферийным устройством, устройством управления, арифметическим устройством и регистром. Например, каждый из вышеописанных контроллера 140, контроллера 240 и т.п. может быть реализован в виде процессора 1001.
[0170] Кроме того, процессор 1001 считывает программы (программные коды), программные модули и данные по меньшей мере с одного из вспомогательного запоминающего устройства 1003 и устройства 1004 связи на запоминающее устройство 1002 и выполняет различные процессы в соответствии с ними. Примеры программ включают в себя программу для выполнения компьютером по меньшей мере части операций, описанных в вышеуказанных вариантах осуществления. Например, контроллер 140 аппарата 10 базовой станции, показанного на фиг. 20, может быть сохранен в запоминающем устройстве 1002 и может быть реализован управляющими программами, выполняемыми процессором 1001. Кроме того, например, контроллер 240 пользовательского терминала 20, показанный на фиг. 21, может быть сохранен в запоминающем устройстве 1002 и может быть реализован управляющими программами, выполняемыми процессором 1001. Хотя был описан пример, в котором описанные выше различные типы процессов выполняются единичным процессором 1001, процессы могут выполняться одновременно или последовательно двумя или более процессорами 1001. Процессор 1001 может быть реализован с одной или более микросхемами. Следует отметить, что программы могут передаваться из сети по электрической линии связи.
[0171] Запоминающее устройство 1002 представляет собой машиночитаемый носитель записи и может включать в себя, например, по меньшей мере одно из постоянного запоминающего устройства (ПЗУ), стираемого программируемого ПЗУ (СППЗУ), электрически стираемого программируемого ПЗУ (ЭСППЗУ) и оперативного запоминающего устройства (ОЗУ). Запоминающее устройство 1002 может называться регистром, кэшем или основной памятью (основным запоминающим устройством). Запоминающее устройство 1002 может хранить, например, программы (программные коды) и программные модули, которые могут быть выполнены для выполнения способа связи в соответствии с вариантом осуществления настоящего изобретения.
[0172] Вспомогательное запоминающее устройство 1003 представляет собой машиночитаемый носитель записи и может включать в себя по меньшей мере одно из следующего: оптический диск, такой как постоянное запоминающее устройство на компакт-диске (CD-ROM), жесткий диск, гибкий диск, магнитный оптический диск (такой как компакт-диск, цифровой универсальный диск и диск Blu-ray (зарегистрированный товарный знак)), смарт-карта, флэш-память (такая как карта, флеш-карта и дисковод для ключей), дискета (англ. floppy, зарегистрированный товарный знак) и магнитная полоса. Описанный выше носитель записи может быть базой данных или сервером, включающим в себя по меньшей мере одно из запоминающего устройства 1002 и/или вспомогательного запоминающего устройства 1003, или может быть любым другим подходящим носителем.
[0173] Устройство 1004 связи представляет собой аппаратное обеспечение (устройство передачи/приема), которое осуществляет связь между компьютерами через проводную и/или беспроводную сеть, и может называться сетевым устройством, сетевым контроллером, сетевой картой или модулем связи. Аппарат 1004 связи может включать в себя радиочастотный коммутатор, дуплексор, фильтр, синтезатор частот и т.п. для реализации, например, по меньшей мере одного из дуплексной связи с частотным разделением (FDD, от англ. Frequency Division Duplex) и дуплексной связи с временным разделением (TDD, от англ. Time Division Duplex). Например, антенна передачи/приема, блок усилителя, блок передачи/приема, интерфейс линии передачи и т.п. могут быть реализованы с помощью устройства 1004 связи. Блок передачи/приема может быть физически или логически разделен и реализован как блок передачи и блок приема.
[0174] Устройство 1005 ввода представляет собой устройство ввода (такое как клавиатура, мышь, микрофон, переключатель, кнопка или датчик), которое принимает входные данные извне. Устройство 1006 вывода представляет собой устройство вывода (такое как дисплей, динамик или светодиодная рампа), которое предоставляет выходные данные наружу. Следует отметить, что устройство 1005 ввода и устройство 1006 вывода могут представлять собой интегрированное устройство (например, сенсорную панель).
[0175] Кроме того, устройства, такие как процессор 1001 и запоминающее устройство 1002, соединены друг с другом через шину 1007, которая передает информацию. Шина 1007 может быть единственной шиной или может включать в себя разные шины для разных устройств.
[0176] Кроме того, каждое из аппарата 10 базовой станции и пользовательского терминала 20 может быть сконфигурировано так, чтобы включать в себя аппаратное обеспечение, такое как макропроцессор, цифровой сигнальный процессор (ЦСП), специализированную интегральную схему (ASIC, от англ. application-specific integrated circuit), программируемое логическое устройство (ПЛУ) и программируемая пользователем вентильная матрица (FPGA, от англ. field-programmable gate array), и часть или все функциональные блоки могут быть реализованы указанным аппаратным обеспечением. Например, процессор 1001 может включать в себя по меньшей мере одно из этих аппаратных устройств.
(Дополнения к вариантам осуществления)
[0177] Хотя варианты осуществления настоящего изобретения были описаны выше, раскрытое изобретение не ограничивается вышеописанными вариантами осуществления, и специалистам в данной области будут очевидны различные варианты, модификации, альтернативы, замены и т.п. Конкретные примеры числовых значений используются в описании для того, чтобы облегчить понимание настоящего изобретения. Однако эти числовые значения являются лишь примерами, и могут использоваться любые другие соответствующие значения, если не указано иное. Классификации пунктов в приведенном выше описании не являются существенными для настоящего изобретения. В зависимости от необходимости, объект, описанный в двух или более пунктах, может быть объединен и использован, и объект, описанный в пункте, может быть применен к объекту, описанному в другом пункте (при условии, что не возникает противоречия). Граница функционального блока или блока обработки на функциональных блок-схемах не обязательно соответствует границе физического компонента. Операции множества функциональных блоков могут физически выполняться одним компонентом, или операция одного функционального блока может физически выполняться множеством компонентов. Порядок выполнения процедур, описанных в вариантах осуществления, может быть изменен до тех пор, пока не возникнет противоречия. Для удобства описания аппарат 10 базовой станции и пользовательский терминал 20 описаны с использованием функциональных блок-схем; однако такие устройства могут быть реализованы в аппаратном обеспечении, программном обеспечении или их комбинациях. Программное обеспечение, выполняемое процессором, включенным в аппарат 10 базовой станции, в соответствии с вариантами осуществления настоящего изобретения, и программное обеспечение, выполняемое процессором, включенным в пользовательский терминал 20, в соответствии с вариантами осуществления настоящего изобретения, могут храниться на любом подходящем носителе информации, таком как оперативное запоминающее устройство (ОЗУ), флэш-память, постоянное запоминающее устройство (ПЗУ), СППЗУ, ЭСППЗУ, регистр, жесткий диск (HDD), съемный диск, CD-ROM, база данных и сервер.
[0178] Уведомление об информации не ограничивается аспектами/вариантами осуществления, описанными в настоящей заявке, и может быть выполнено любым другим способом. Например, информация может быть указана сигнализацией физического уровня (например, нисходящей информацией управления (DCI) и восходящей информацией управления (UCI)), сигнализацией более высокого уровня (например, сигнализацией управления радиоресурсами (RRC), сигнализацией управления доступом к среде (MAC), широковещательной информацией (блок основной информации (MIB) и блок системной информации (SIB))), любым другим сигналом или их комбинацией. Кроме того, сигнализация RRC может называться сообщением RRC и может представлять собой сообщение настройки соединения RRC или сообщение реконфигурации соединения RRC.
[0179] Аспекты/варианты осуществления, раскрытые в настоящей заявке, могут быть применены по меньшей мере к одной из систем, которые используют схему долгосрочного развития (LTE), LTE-Advanced (LTE-A), SUPER 3G, IMT-Advanced, 4G, 5G, Будущий радиодоступ (FRA), NR (Новое радио), W-CDMA (зарегистрированный товарный знак), GSM (зарегистрированный товарный знак), CDMA 2000, ультрамобильный широкополосный доступ (UMB), IEEE 802.11 (Wi-Fi (зарегистрированный товарный знак)), IEEE 802.16 (WiMAX (зарегистрированный товарный знак)), IEEE 802.20, UWB (сверхширокополосный), Bluetooth (зарегистрированный товарный знак), любую другую соответствующую систему и систему следующего поколения, усовершенствованную на основе вышеуказанных систем.
[0180] Порядок процедур, последовательности и блок-схемы аспектов/вариантов осуществления, раскрытых в этом описании, могут быть изменены, если не возникает противоречий. Например, в способе, раскрытом в этом описании, различные этапы представлены в примерном порядке и не ограничены конкретным представленным порядком.
[0181] Некоторые операции, описанные как выполняемые аппаратом 10 базовой станции, в некоторых случаях могут выполняться его более верхним узлом. В сети, включающей в себя один или более сетевых узлов, имеющих аппарат 10 базовой станции, очевидно, что различные операции, выполняемые для связи с пользовательским терминалом 20, могут выполняться по меньшей мере одним из аппарата 10 базовой станции и сетевого узла, отличного от аппарата 10 базовой станции (например, узлом управления мобильностью (ММЕ, от англ. mobility management entity) или обслуживающим шлюзом (S-GW, от англ. serving-gateway), но сетевой узел этим не ограничивается). Хотя был описан пример, в котором имеется один сетевой узел, отличный от аппарата 10 базовой станции, множество других сетевых узлов (например, узлов ММЕ и S-GW) могут использоваться в комбинации.
[0182] Информация, сигналы или т.п.могут выводиться с более верхнего уровня (или более нижнего уровня) на более нижний уровень (или более верхний уровень). Информация, сигналы и т.п. могут быть введены/выведены посредством множества сетевых узлов.
[0183] Информация ввода/вывода и т.п. может храниться в определенном положении (например, в памяти) или управляться управляющей таблицей. Информация ввода/вывода и т.п. может быть перезаписана, обновлена или добавлена. Информация вывода и т.п. может быть удалена. Информация ввода и т.п. может передаваться на другие устройства.
[0184] Согласно настоящему изобретению, определение может быть выполнено с помощью значения (0 или 1), представленного одним битом, может быть выполнено с помощью логического значения (Логическое значение: истина или ложь) и может быть выполнено путем сравнения числовых значений (например, сравнение с заранее определенным значением).
[0185] Программное обеспечение следует широко интерпретировать как означающее инструкцию, набор инструкций, код, сегмент кода, программный код, программу, подпрограмму, программный модуль, приложение, программное приложение, программный пакет, алгоритм, подалгоритм, объект, исполняемый файл, тред исполнения, процедуру, функцию и т.п., независимо от того, упоминается ли программное обеспечение как программное обеспечение, микропрограммное обеспечение, промежуточное программное обеспечение, микрокод, язык описания аппаратного обеспечения или любым другим названием.
[0186] Кроме того, программное обеспечение, инструкции, информация и т.п. могут быть переданы и приняты посредством среды передачи. Например, когда программное обеспечение передается с веб-сайта, сервера или любого другого удаленного источника с использованием по меньшей мере одного из проводной технологии (такой как коаксиальный кабель, оптоволоконный кабель, витая пара и цифровая абонентская линия (DSL)) и беспроводной технологии (такой как инфракрасное излучение и микроволны), эти проводные и/или беспроводные технологии включены в определение среды передачи.
[0187] Информация, сигналы и т.п., как описано в настоящей заявке, могут быть представлены с использованием любой из различных методик. Например, данные, инструкция, команда, информация, сигнал, бит, символ и микросхема, которые могут упоминаться во всем приведенном выше описании, могут быть представлены напряжением, током, электромагнитной волной, магнитным полем, магнитной частицей, оптическим полем, фотоном или любой их комбинацией.
[0188] Термины, описанные в настоящей заявке, и термины, необходимые для понимания настоящего изобретения, могут быть заменены терминами, имеющими те же или аналогичные значения. Например, по меньшей мере одно из канала и символа может быть сигналом. Кроме того, сигнал может представлять собой сообщение. Кроме того, компонентная несущая (СС) может упоминаться как несущая частота, сота или частотная несущая.
[0189] Используемые здесь термины "система" и "сеть" используются взаимозаменяемо.
[0190] Кроме того, информация, параметры и т.п., описанные в настоящей заявке, могут быть представлены в виде абсолютных значений, могут быть представлены в виде относительных значений относительно заданных значений или могут быть представлены в виде другой соответствующей информации. Например, радиоресурс может быть описан с помощью индекса.
[0191] Названия, используемые для описанных выше параметров, никоим образом не предназначены для ограничения. Кроме того, может быть случай, когда формулы, использующие эти параметры, могут отличаться от тех, которые явно раскрыты в настоящей заявке. Различные каналы (такие как PUCCH и PDCCH) и информационные элементы могут быть идентифицированы с помощью любых названий, и названия, присвоенные этим различным каналам и информационным элементам, никоим образом не предназначены для ограничения.
[0192] В настоящем изобретении такие термины, как "базовая станция (BS)", "базовая радиостанция", "аппарат базовой станции", "стационарная станция", "Node В", "eNode В (eNB)", "gNode В (gNB)", "доступ точка", "точка передачи/приема", "сота", "сектор", "группа сот", "несущая" и "компонентная несущая" могут использоваться взаимозаменяемо. Базовая станция может называться макросотой, малой сотой, фемтосотой, пикосотой или любым другим термином.
[0193] Базовая станция может вмещать одну или более (например, три) сот. Если базовая станция вмещает несколько сот, вся зона покрытия базовой станции может быть разделена на множество меньших областей, и каждая из меньших областей может предоставлять услугу связи с использованием подсистемы базовой станции (такой как удаленный радиоблок (RRH, от англ. remote radio head), которая представляет собой небольшую базовую станцию для использования внутри помещения). Термин «сота» или «сектор» обозначает часть или всю зону покрытия базовой станции и/или подсистемы базовой станции, которая предоставляет услугу связи в этом покрытии.
[0194] В настоящем изобретении такие термины как «мобильная станция (MS, от англ. mobile station)*, «пользовательский терминал», «пользовательское оборудование (UE, от англ. user equipment)* и «терминал» могут использоваться взаимозаменяемо.
[0195] Мобильная станция может также называться специалистами в данной области абонентским пунктом, мобильной установкой, абонентской установкой, беспроводной установкой, удаленной установкой, мобильным устройством, беспроводным устройством, беспроводным устройством связи, удаленным устройством, мобильным абонентским пунктом, терминалом доступа, мобильным терминалом, беспроводным терминалом, удаленным терминалом, телефонным аппаратом, агентом пользователя, мобильным клиентом, клиентом или некоторыми другими подходящими терминами.
[0196] По меньшей мере одно из базовой станции и мобильной станции может называться устройством передачи, устройством приема, устройством связи или т.п. По меньшей мере одно из базовой станции и мобильной станции может представлять собой устройство, установленное на подвижном объекте, сам подвижный объект или т.п. Подвижный объект может представлять собой транспортное средство (например, такое как автомобиль или самолет), подвижный объект, который перемещается беспилотно (например, таким как беспилотный летательный аппарат или автономное транспортное средство), или робот (пилотируемый или беспилотный). По меньшей мере одно из базовой станции и мобильной станции также включает в себя устройство, которое не обязательно перемещается во время операций связи. Например, по меньшей мере одно из базовой станции и мобильной станции может быть устройством Интернета вещей (IoT, от англ. Internet of Things), таким как датчик.
[0197] Базовая станция в настоящем изобретении может быть заменена пользовательским терминалом. Например, каждый аспект/вариант осуществления настоящего изобретения может быть применен к конфигурации таким образом, что связь между базовой станцией и пользовательским терминалом заменяется связью между множеством пользовательских терминалов 20 (которая может называться связью типа устройство-устройство (D2D, от англ. device-to-device), связью типа транспортное средство - все объекты (V2X, от англ. vehicle-to-everything) или т.п.). В этом случае функции описанного выше аппарата 10 базовой станции могут быть включены в пользовательский терминал 20. Дополнительно, такие термины, как "восходящий" и "нисходящий", могут быть заменены терминами, соответствующими межтерминальной связи (например, "прямой"). Например, восходящий канал, нисходящий канал могут быть заменены прямым каналом.
[0198] Аналогично, пользовательский терминал в настоящем изобретении может быть заменен базовой станцией. В этом случае функции, включенные в вышеописанный пользовательский терминал, могут быть включены в базовую станцию.
[0199] Используемые здесь термины "определение" и "принятие решения" могут включать в себя различные типы операций. Например, "определение" и "принятие решения" могут включать определение, предусматривающее выполнение следующего: расчет, вычисление, обработка, выведение, исследование, поиск (например, поиск в таблице, базе данных или любой другой структуре данных) или установление. Кроме того, термин "определение" может подразумевать определенный или установленный результат оценки, расчета, вычисления, обработки, выведения, исследования, поиска (например, поиска в таблице, базе данных или другой структуре данных) или установления. Кроме того, "определение" и "принятие решения" могут подразумевать определенный или установленный результат приема (например, приема информации), передачи (например, передачи информации), ввода, вывода или предоставления доступа (например, доступа к данным в памяти). Кроме того, "определение" и "принятие решения" могут подразумевать определенный или установленный результат разрешения, отбора, выбора, установления или сравнения. А именно, "определение" и "принятие решения" могут подразумевать, что некоторая операция определена или установлена. Кроме того, "определение (принятие решения)" может быть заменено на "предположение", "ожидание" или "рассмотрение".
[0200] Термины "соединенный", "связанный" или любой их вариант означают любое непосредственное или опосредованное соединение или связь между двумя или более элементами и могут включать в себя наличие одного или более промежуточных элементов между двумя элементами, "соединенными" или "связанными" друг с другом. Соединение или связь между элементами могут быть физическими, логическими или их комбинациями. Например, «соединенный» может быть заменено на «доступ». В контексте настоящей заявки два элемента могут рассматриваться как взаимно "соединенные" или "связанные" с использованием по меньшей мере одного из одного или более проводов, кабелей и печатных электрических соединений, и, в качестве некоторых неограничивающих и невключающих примеров, с использованием электромагнитной энергии, такой как электромагнитная энергия с длиной волны в радиочастотном диапазоне, микроволновом диапазоне и оптическом диапазоне (как видимом, так и невидимом).
[0201] Опорный сигнал может быть сокращен как RS и может называться пилотным сигналом в соответствии с применимыми стандартами.
[0202] В контексте настоящей заявки термин "на основе" не означает "на основе только", если не указано иное. Другими словами, термин «на основе» может означать как «на основе только», так и «на основе по меньшей мере».
[0203] Любая ссылка на элементы, в которых используются такие термины, как "первый" и "второй", используемые в настоящей заявке, как правило, не ограничивает количество или порядок этих элементов. Такие термины могут использоваться в настоящем раскрытии в качестве удобного способа различения двух или более элементов. Соответственно, ссылка на первый и второй элементы не означает, что могут использоваться только два элемента, или не означает, что первый элемент должен каким-либо образом предшествовать второму элементу.
[0204] Термин "средство", используемый в конфигурации каждого аппарата, как описано выше, может быть заменен на "блок", "схема", "устройство" или т.п.
[0205] Когда в настоящем изобретении используются термины "включать в себя", "включающий в себя" и любые их варианты, предполагается, что эти термины являются включающими, аналогичными термину "содержащий". Кроме того, термин «или», используемый в настоящем изобретении, не должен нести смысл "исключающего или".
[0206] Радиокадр может быть сконфигурирован одним или более кадрами во временной области. Во временной области один или более кадров могут называться субкадрами. Каждый из субкадров может быть сконфигурирован одним или несколькими слотами во временной области. Кроме того, субкадр может представлять собой фиксированную продолжительность времени (например, 1 мс), которая не зависит от нумерологии.
[0207] Нумерология может представлять собой параметр связи, применяемый по меньшей мере к одному из передачи или приема сигнала или канала. Нумерология может представлять, например, по меньшей мере одно из разноса поднесущих (SCS, от англ. subcarrier spacing), полосу пропускания, длину символа, длину циклического префикса, временной интервал передачи (TTI), количество символов на TTI, конфигурацию радиокадра, конкретный процесс фильтрации, выполняемый передатчиком/приемником в частотной области и конкретный процесс оконной обработки, выполняемый передатчиком/приемником во временной области.
[0208] Слот может быть сконфигурирован одним или несколькими символами (такими как символы мультиплексирования с ортогональным частотным разделением (OFDM) или символы множественного доступа с частотным разделением и одной несущей (SC-FDMA)) во временной области. Слот может быть единицей времени, основанной на нумерологии.
[0209] Слот может включать в себя множество минислотов. Во временной области каждый мини-слот может быть сконфигурирован одним или более символами. Мини-слот может называться субслотом. Мини-слот может быть сконфигурирован меньшим количеством символов, чем количество символов в слоте. PDSCH (или PUSCH), передаваемый в единицу времени, которая больше мини-слота, может называться "тип А отображения PDSCH (или PUSCH)". PDSCH (или PUSCH), передаваемый с использованием мини-слота, может упоминаться как «тип В отображения PDSCH (или PUSCH)».
[0210] Каждый из радиокадра, субкадра, слота, мини-слота и символа представляет единицу времени для передачи сигнала. Радиокадр, субкадр, слот, мини-слот и символ могут именоваться другими соответствующими названиями.
[0211] Например, один субкадр может называться «временным интервалом передачи» (TTI, от англ. Transmission Time Interval), множество последовательных субкадров могут называться «ТТ1», или один слот или один мини-слот могут называться «ТТ1». А именно, по меньшей мере одно из субкадра и TTI может представлять собой субкадр (1 мс) в существующей LTE, может представлять собой временной интервал короче 1 мс (например, от 1 до 13 символов) или временной интервал длиннее 1 мс. Следует отметить, что единица, представляющая TTI, может упоминаться как «слот», «минислот» или т.п., вместо термина «субкадр». Кроме того, один слот может называться единицей времени. Единица времени может отличаться для каждой соты в соответствии с нумерологией.
[0212] Например, TTI относится к минимальной единице времени для планирования в радиосвязи. Например, в системе LTE базовая станция выполняет планирование для распределения радиоресурсов (таких как полоса частот и мощность передачи, которые могут использоваться в каждом пользовательском терминале 20) в единицах TTI для каждого пользовательского терминала 20. Следует отметить, что определение "TTI" не ограничивается вышеизложенным.
[0213] TTI может представлять собой единицу времени передачи, например, пакета закодированных в канал данных (транспортного блока), кодового кода или кодового слова, или может представлять собой единицу обработки для планирования или адаптации линии связи. Следует отметить, что, когда предоставляется TTI, временной интервал (например, номер символа), на который фактически отображается транспортный блок, кодовый блок или кодовое слово, может быть короче, чем TTI.
[0214] Следует отметить, что, когда один слот или один мини-слот называют «TTI», один или более интервалов TTI (т.е. один или более слотов или один или более мини-слотов) могут представлять собой минимальную единицу времени для планирования. Кроме того, количество слотов (количество мини-слотов), формирующих минимальную единицу времени планирования, может регулироваться.
[0215] TTI с длительностью времени 1 мс может упоминаться как стандартный TTI (TTI в LTE версии 8-12), обычный TTI, длинный TTI, стандартный субкадр, обычный субкадр, длинный субкадр, слот или т.п. TTI короче обычного TTI может упоминаться как «укороченный TTI», «короткий TTI», «частичный TTI (или дробный TTI)», «укороченный субкадр», «короткий субкадр», «минислот», «субслот», «слот» или т.п.
[0216] Следует отметить, что длинный TTI (например, обычный TTI, субкадр или т.п.) может быть заменен на TTI с длительностью времени, превышающей 1 мс, а короткий TTI (например, укороченный TTI или т.п.) может быть заменен на TTI с длительностью TTI короче, чем длительность TTI длинного TTI, и большей или равной 1 мс.
[0217] Ресурсный блок (RB, англ. resource block) представляет собой блок размещения ресурсов во временной области и частотной области и может включать в себя одну или более последовательных поднесущих в частотной области. Количество поднесущих, включенных в RB, может быть одинаковым, независимо от нумерологии, и может быть, например, 12. Количество поднесущих, включенных в RB, может быть определено на основании нумерологии.
[0218] Кроме того, RB может включать в себя один или более символов во временной области и может иметь длину одного слота, одного мини-слота, одного субкадра или одного TTI. Каждый из одного TTI и одного субкадра может быть сконфигурирован одним или более ресурсными блоками.
[0219] Следует отметить, что один или более RB могут называться физическими ресурсными блоками (PRB, от англ. physical resource block), группами поднесущих (SCG, от англ. subcarrier group), группами ресурсных элементов (REG, от англ. resource element group), парами PRB, парами RB или т.п.
[0220] Кроме того, ресурсный блок может быть сконфигурирован одним или более ресурсными элементами (RE, от англ. resource element). Например, один RE может представлять собой радиоресурсную область одной под несущей и одного символа.
[0221] Часть полосы пропускания (BWP) (которая также может называться, например, частичной полосой пропускания) может представлять в определенной несущей подмножество последовательных общих ресурсных блоков (общих RB) для определенной нумерологии. В контексте настоящей заявки общий RB может быть определен с помощью индекса RB, когда в качестве опорной точки используется общая опорная точка несущей. PR В может быть определен в BWP и может быть пронумерован в BWP.
[0222] BWP может включать в себя BWP для восходящей линии связи (UL BWP) и BWP для нисходящей линии связи (DL BWP). Для UE один или более BWP могут быть сконфигурированы в одной несущей.
[0223] По меньшей мере одна из сконфигурированных BWP может быть активной, и UE не требуется предполагать, что заданный сигнал/канал передается/принимается вне активной BWP. Следует отметить, что сота, несущая и т.п.в настоящем изобретении могут быть заменены на BWP.
[0224] Структуры вышеописанных радиокадра, субкадра, слота, мини-слота, символа и т.п. являются просто примерами. Например, следующие конфигурации могут быть изменены по-разному: количество субкадров, включенных в радиокадр; количество слотов на субкадр или на радиокадр; количество мини-слотов, включенных в слот; количество символов и RB, включенных в слот или мини-слот; количество поднесущих, включенных в RB; и количество символов, длина символа, длина циклического префикса (CP) и т.п. в пределах TTI.
[0225] В настоящем изобретении, например, если к переводу добавлены такие артикли, как "a", "an" и "the" на английском языке, существительные, следующие за указанными артиклями, могут иметь множественное число.
[0226] В настоящем изобретении фраза «А и В различны» может означать «А и В отличаются друг от друга». Следует отметить, что указанный термин может также означать "каждый из А и В отличается от С." Такие термины, как "разделенный" и "связанный", также могут быть истолкованы аналогичным образом.
[0227] Аспекты/варианты осуществления, описанные в настоящей заявке, могут использоваться по отдельности, могут использоваться в комбинации или могут переключаться во время выполнения. Кроме того, уведомление о заранее определенной информации (например, уведомление о том, что "представляет собой X") не ограничивается уведомлением, сделанным явно, а уведомление может быть сделано неявно (например, путем не отправки уведомления о заранее определенной информации).
[0228] В настоящем изобретении передатчик 210 и приемник 220 являются примерами блоков связи. Передатчик 110 и приемник 120 являются примерами блоков связи. Запрос возможностей UE является примером первого сообщения RRC, в котором запрашиваются возможности пользовательского терминала. Информация о возможностях UE является примером второго сообщения RRC, в котором сообщается о возможностях UE.
[0229] Хотя варианты осуществления настоящего изобретения были подробно описаны, специалистам в данной области должно быть понятно, что настоящее изобретение не ограничивается вариантами осуществления, раскрытыми в описании. Изменения и модификации могут быть внесены в настоящее изобретение без отступления от объема настоящего изобретения, изложенного в формуле изобретения. Соответственно, описание настоящего изобретения предназначено для предоставления иллюстративного описания и не предназначено для придания какого-либо ограничительного значения настоящему изобретению.
СПИСОК ПОЗИЦИЙ
[0230]
10 аппарат базовой станции
110 передатчик
120 приемник
130 блок настройки
140 контроллер
20 пользовательский терминал
210 передатчик
220 приемник
230 блок настройки
240 контроллер
1001 процессор
1002 запоминающее устройство
1003 вспомогательное запоминающее устройство
1004 устройство связи
1005 устройство ввода
1006 устройство вывода
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2020 |
|
RU2824788C1 |
| ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2019 |
|
RU2795833C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ, БАЗОВАЯ РАДИОСТАНЦИЯ И СПОСОБ РАДИОСВЯЗИ | 2017 |
|
RU2742555C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2019 |
|
RU2785056C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2017 |
|
RU2740073C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ | 2018 |
|
RU2768794C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И БАЗОВАЯ СТАНЦИЯ | 2018 |
|
RU2773130C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2018 |
|
RU2760942C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ | 2018 |
|
RU2772488C1 |
| ТЕРМИНАЛ, СПОСОБ РАДИОСВЯЗИ, БАЗОВАЯ СТАНЦИЯ И СИСТЕМА | 2021 |
|
RU2769973C1 |
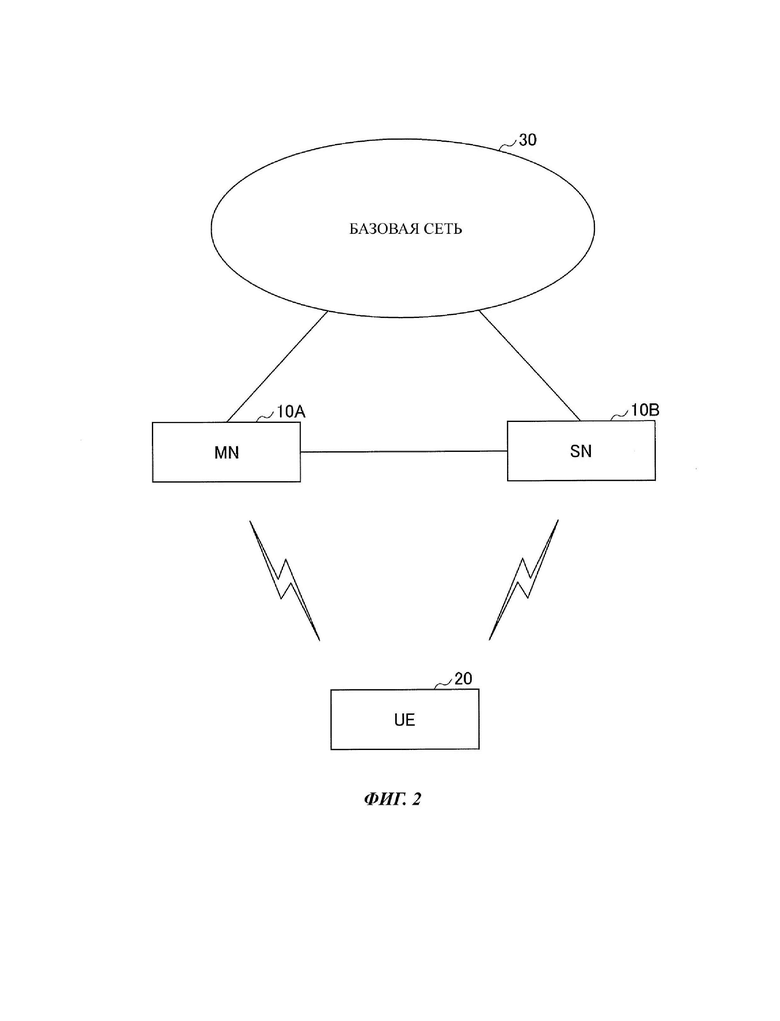
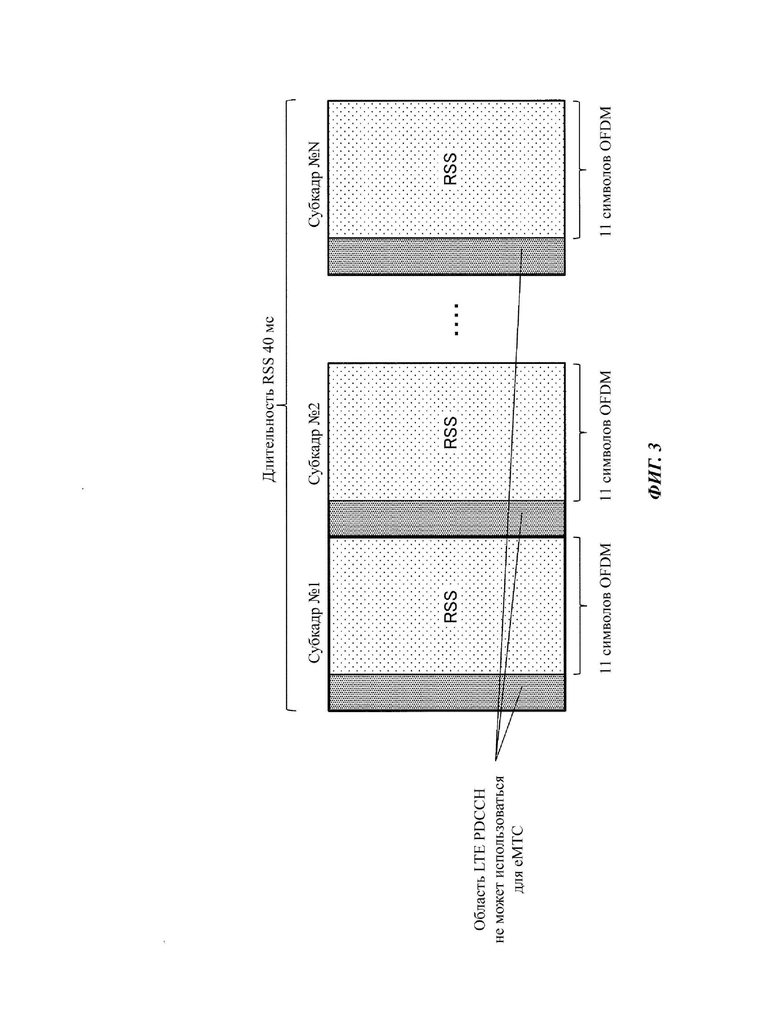
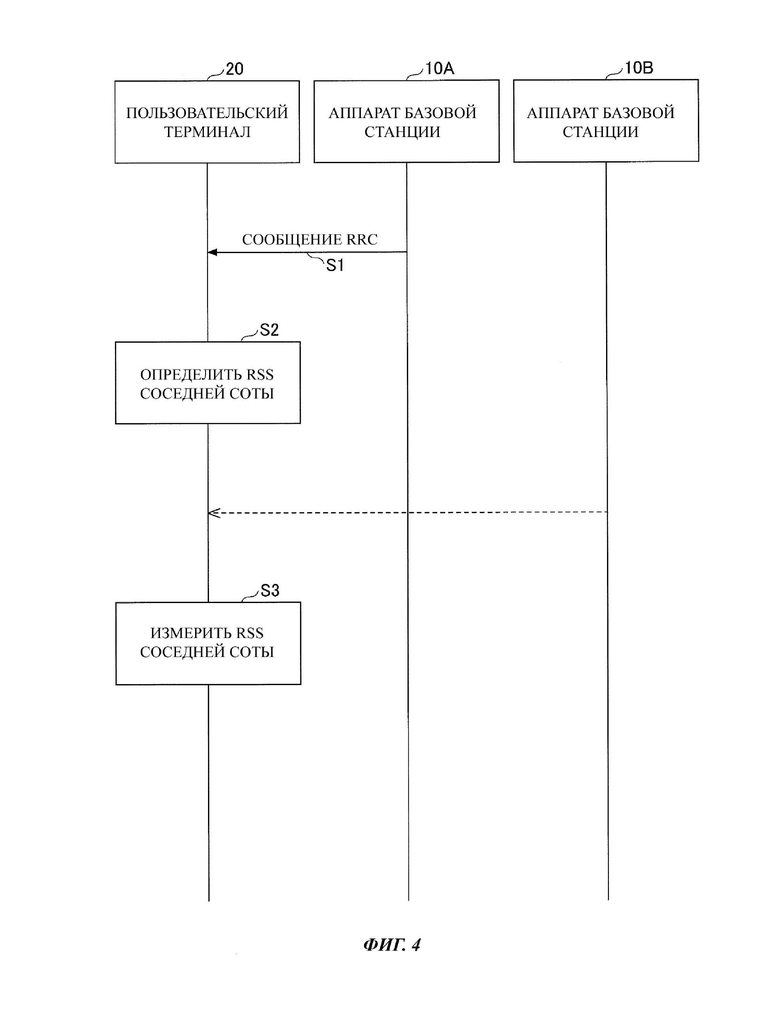
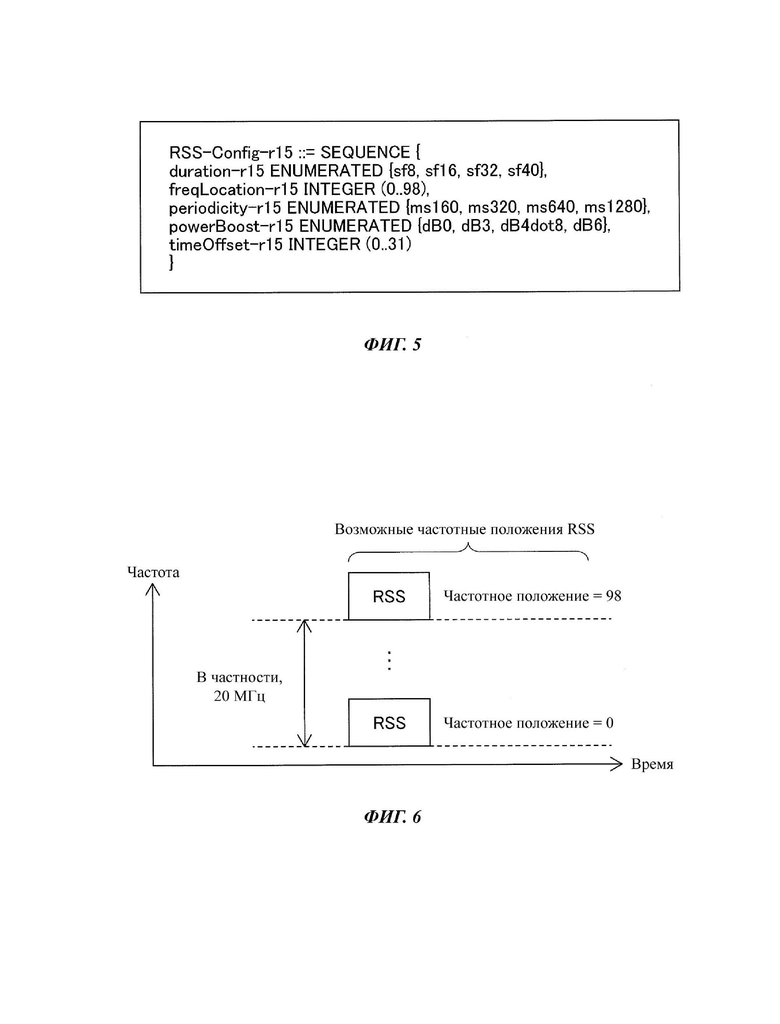
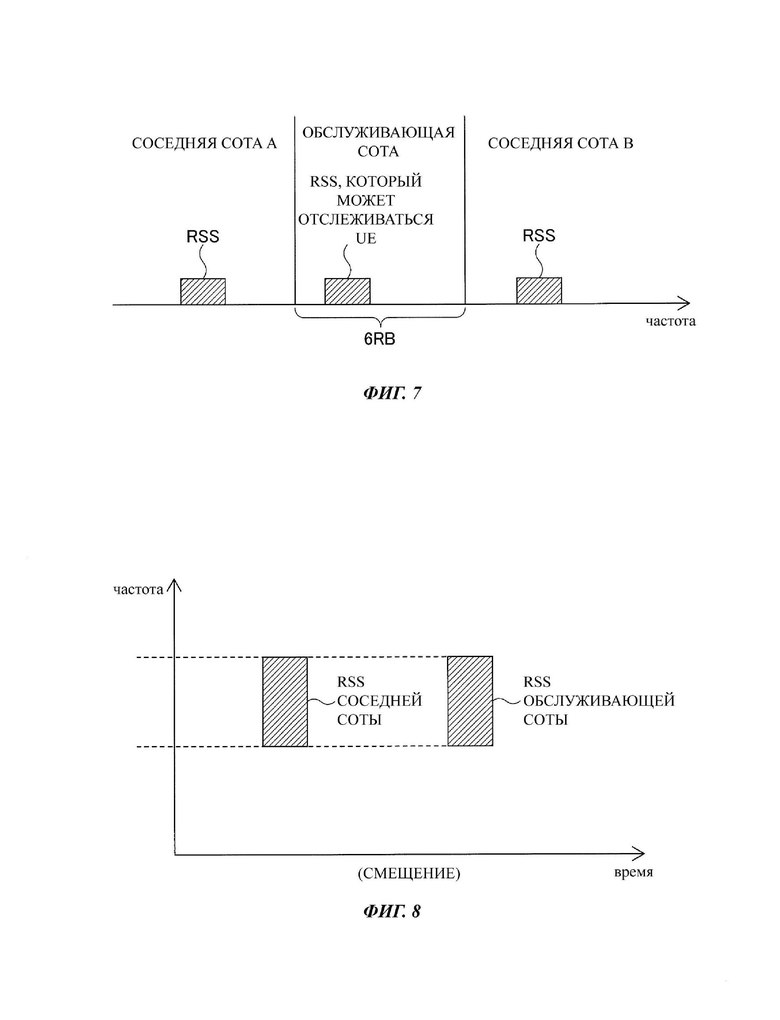
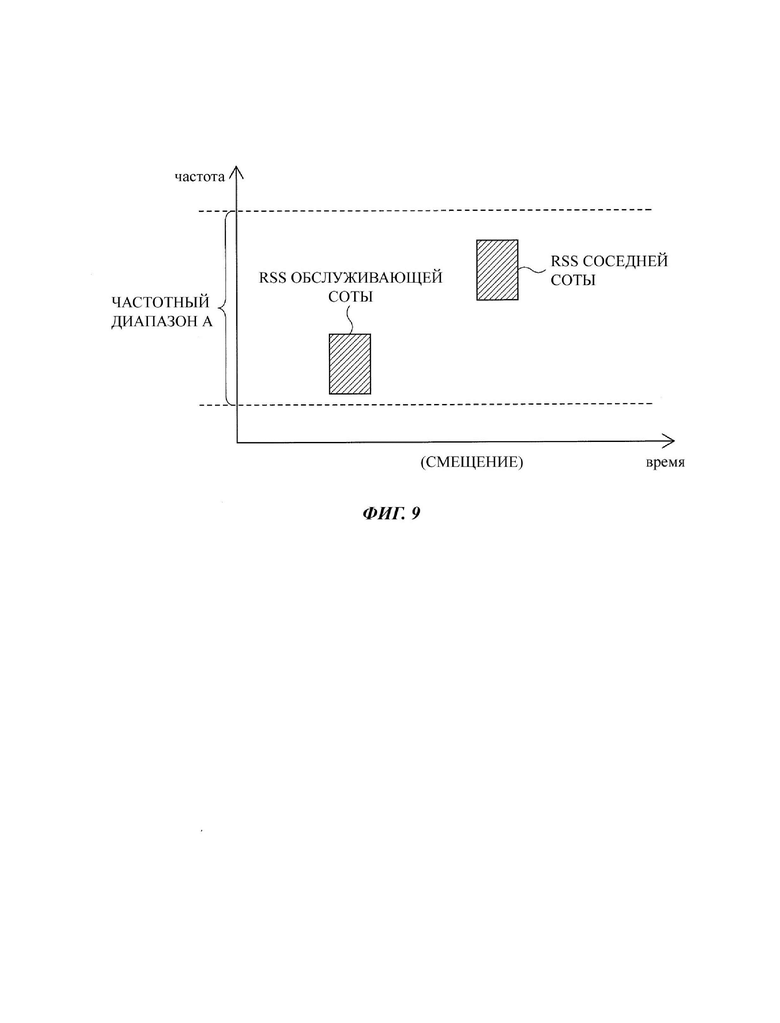
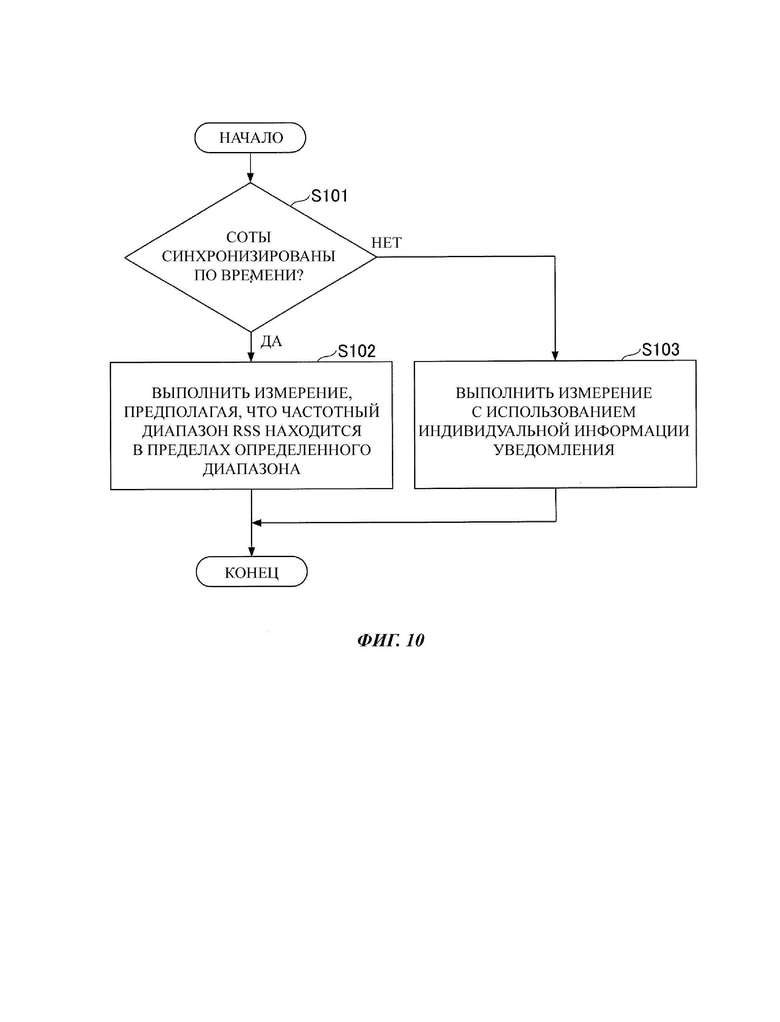
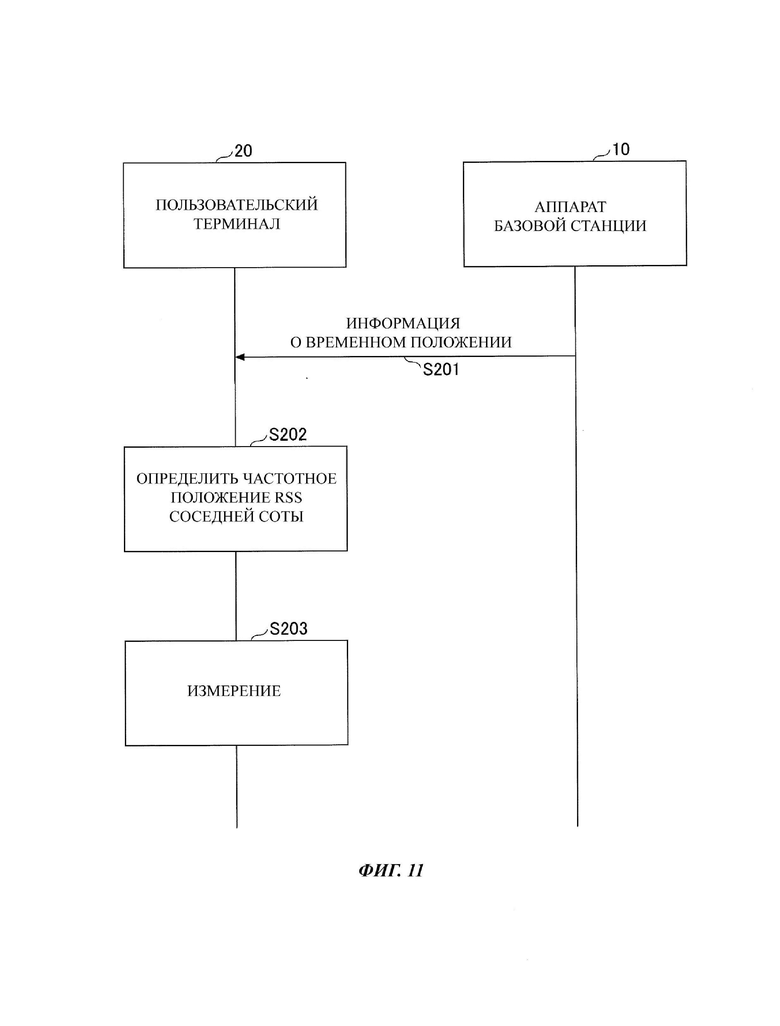
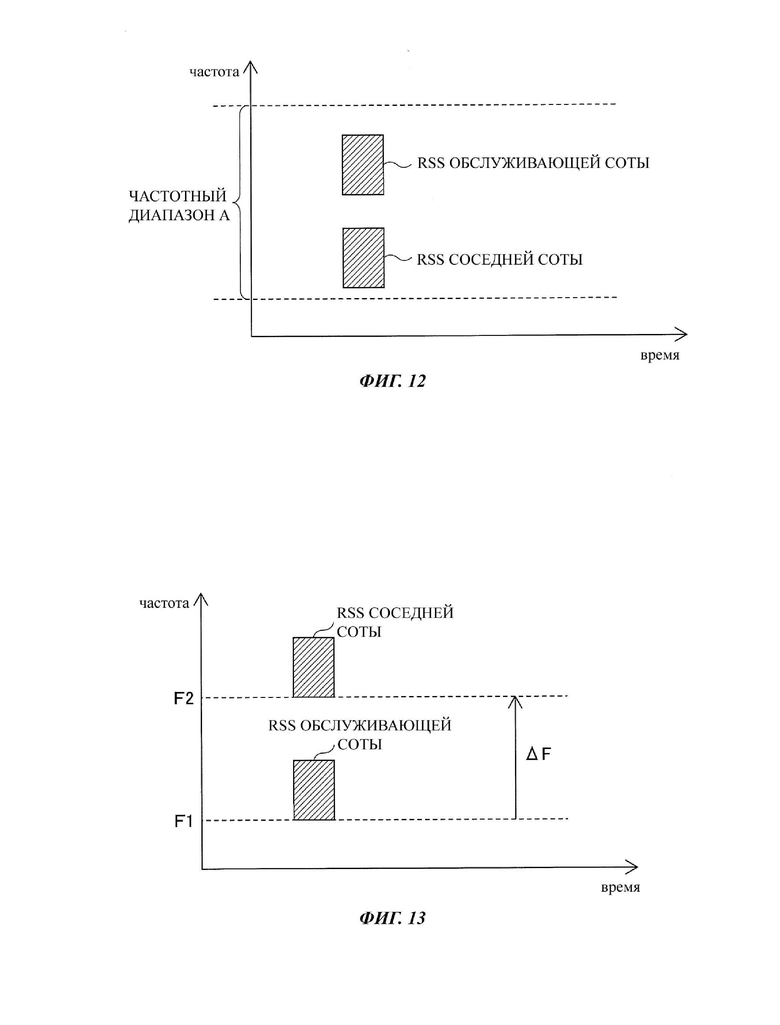
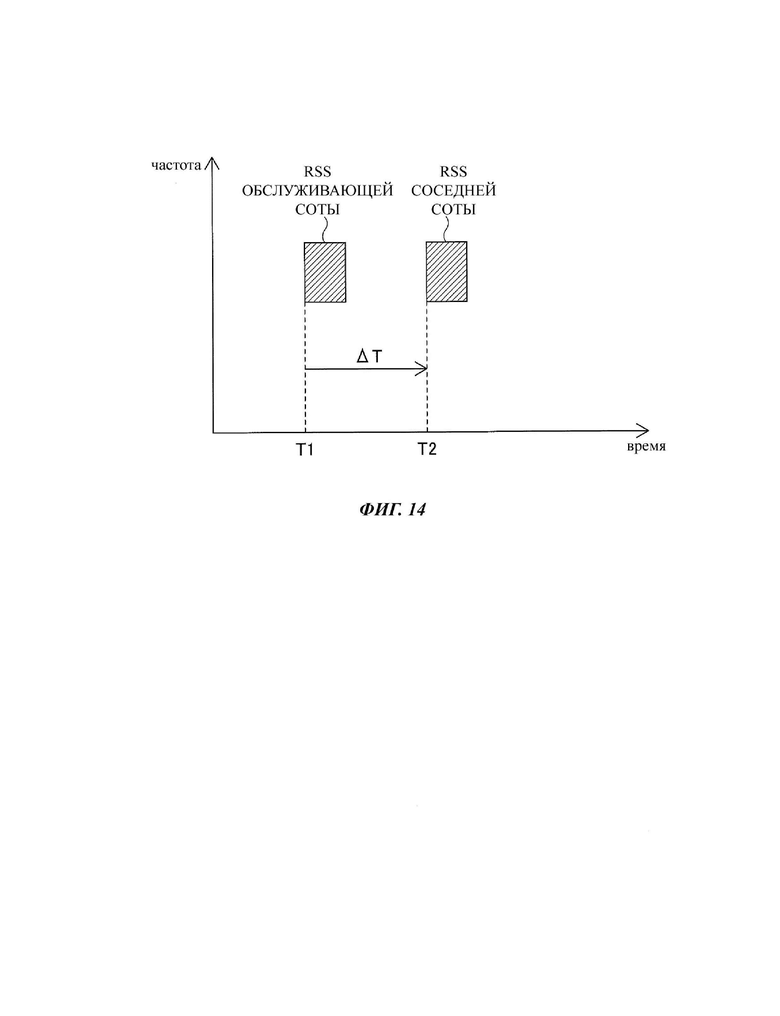
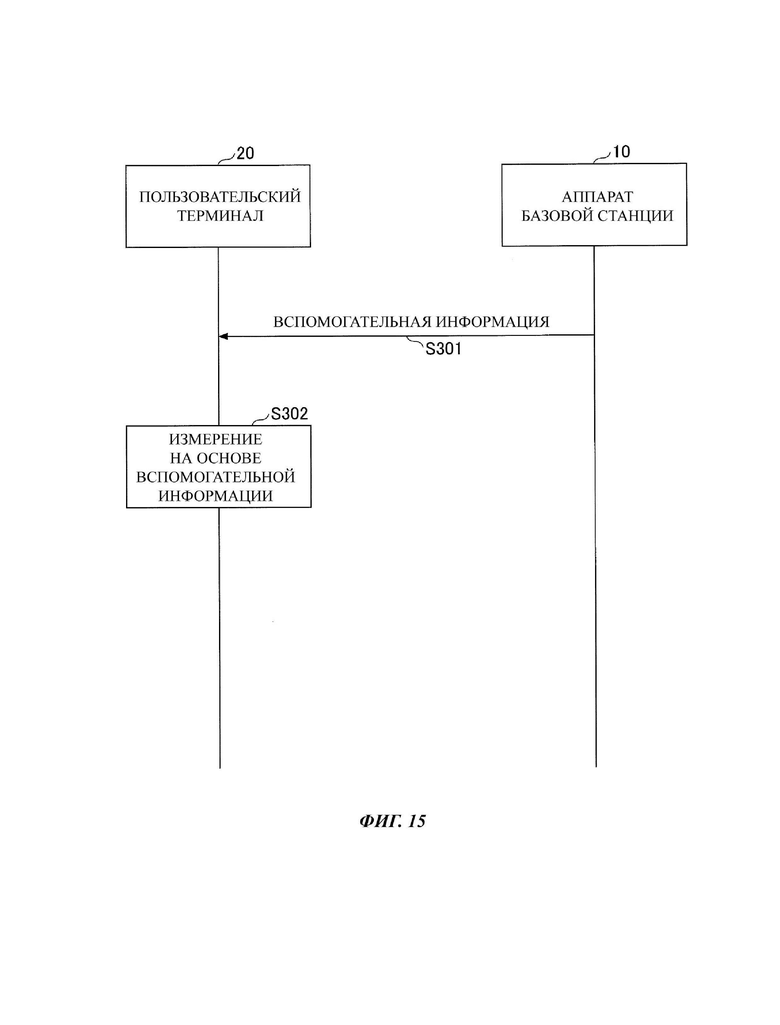
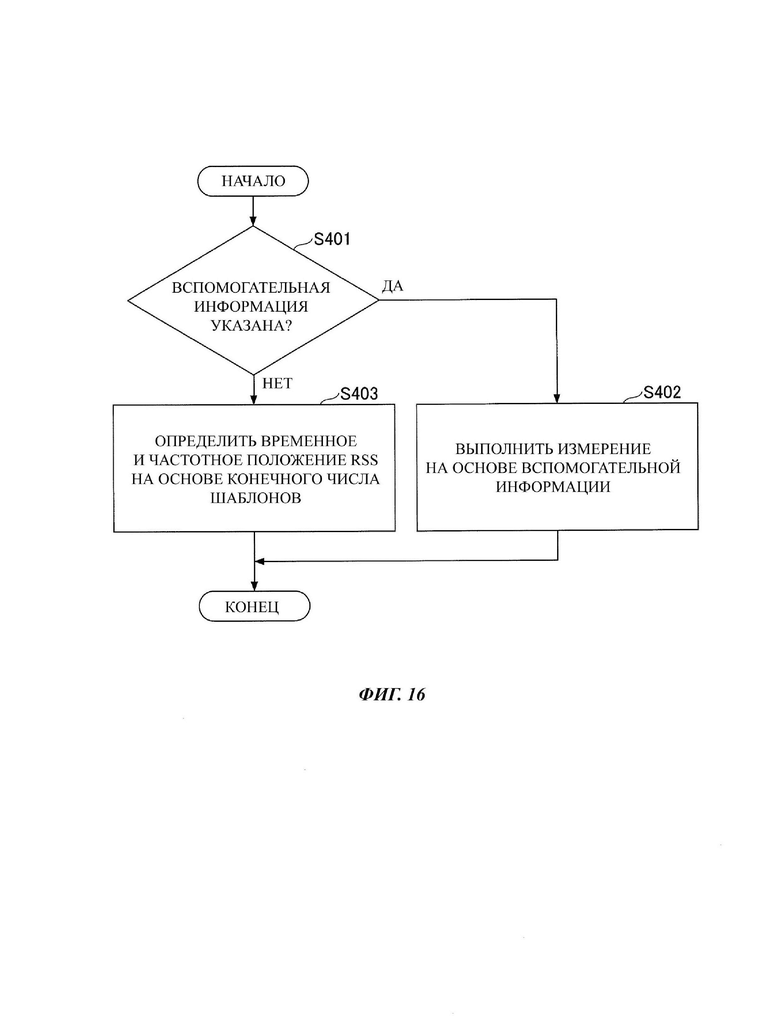
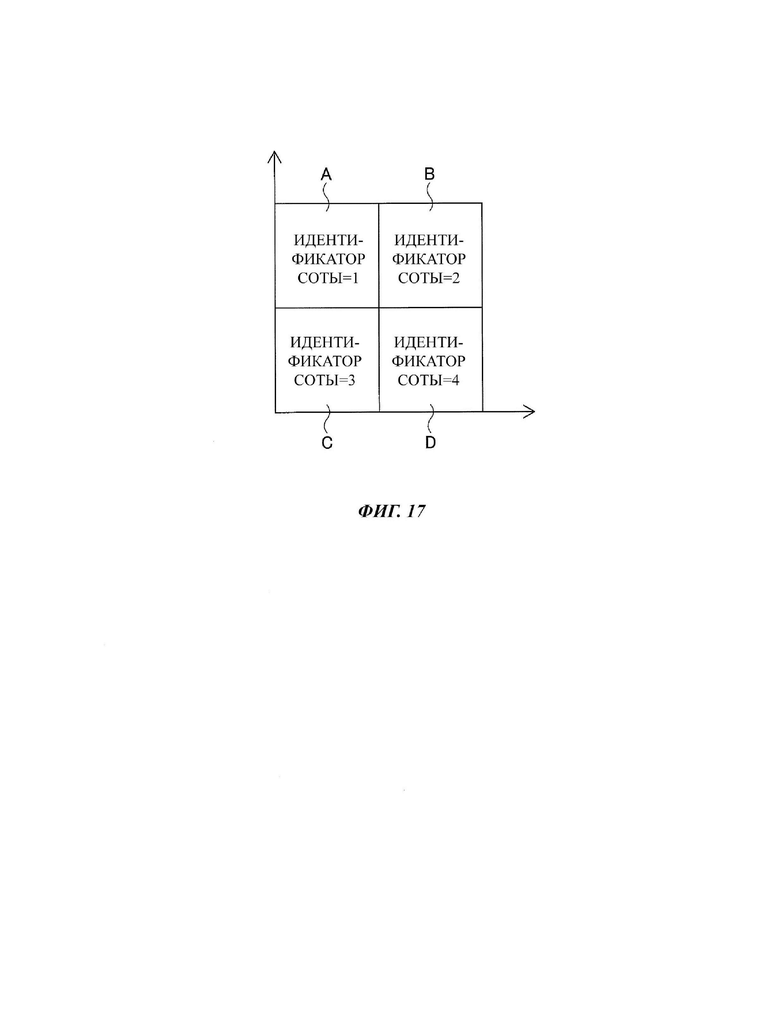
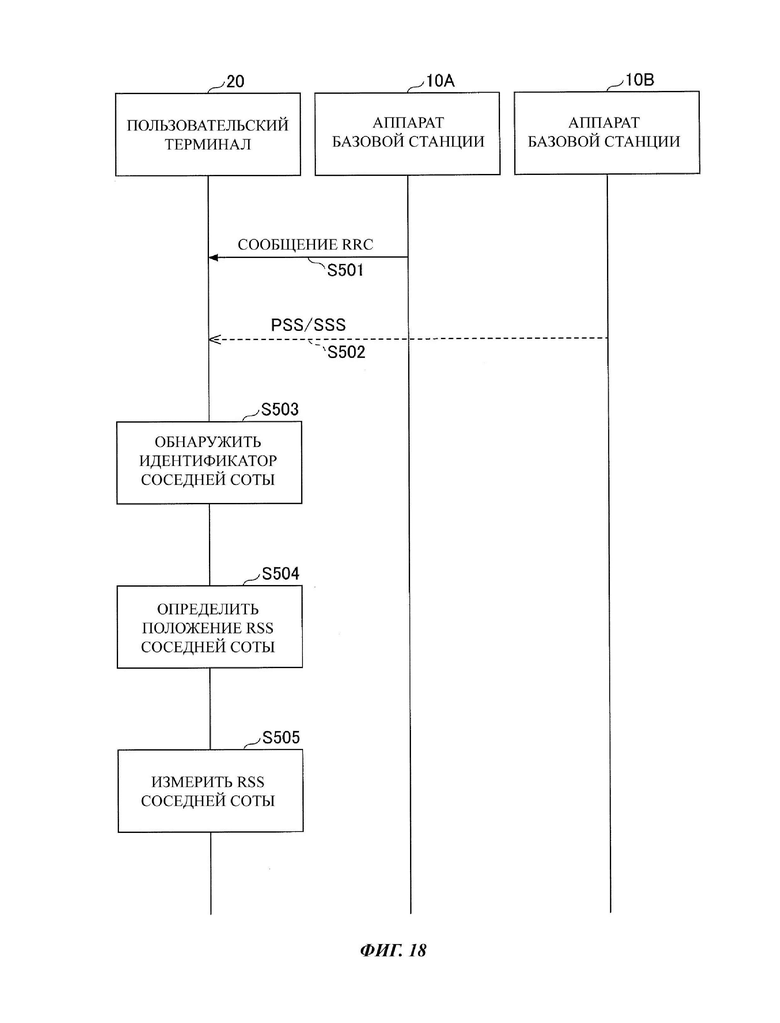
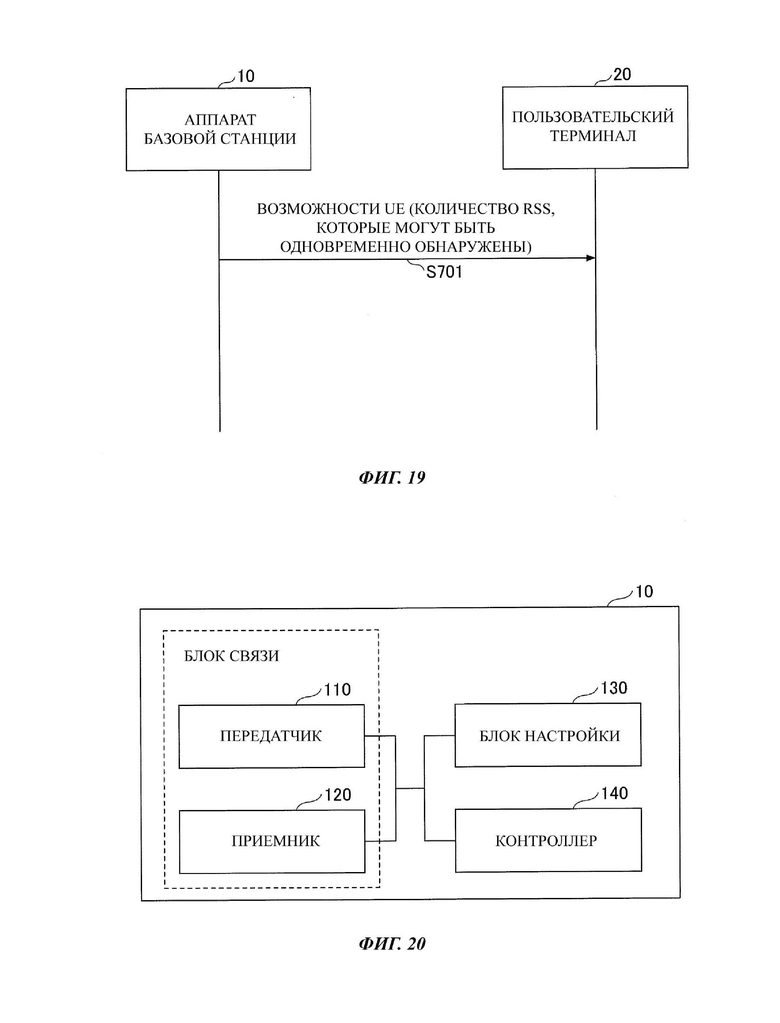
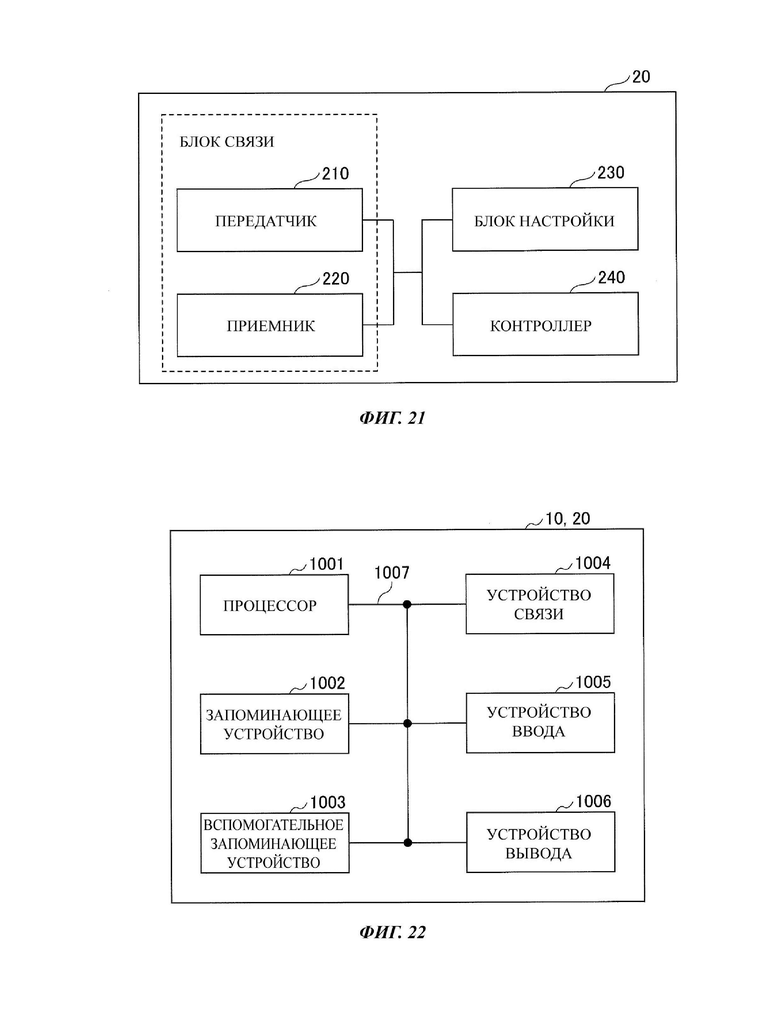
Изобретение относится к методике измерения в системе радиосвязи, а именно к измерениям, производимым с использованием сигнала ресинхронизации соседней соты. Техническим результатом является уменьшение системных затрат на передачу сигналов, требуемых, когда пользовательский терминал выполняет измерение с использованием сигнала ресинхронизации соседней соты. Для этого терминал связи содержит контроллер, выполненный с возможностью на основе информации о множестве соседних сот определения положения ресурса сигнала ресинхронизации, которое не перекрывается по отношению к времени или частоте между соседними сотами, количество которых равно или меньше, чем заданное количество, и приемник, выполненный с возможностью приема сигнала ресинхронизации соседней соты на основе указанного положения. 3 н. и 2 з.п. ф-лы, 22 ил.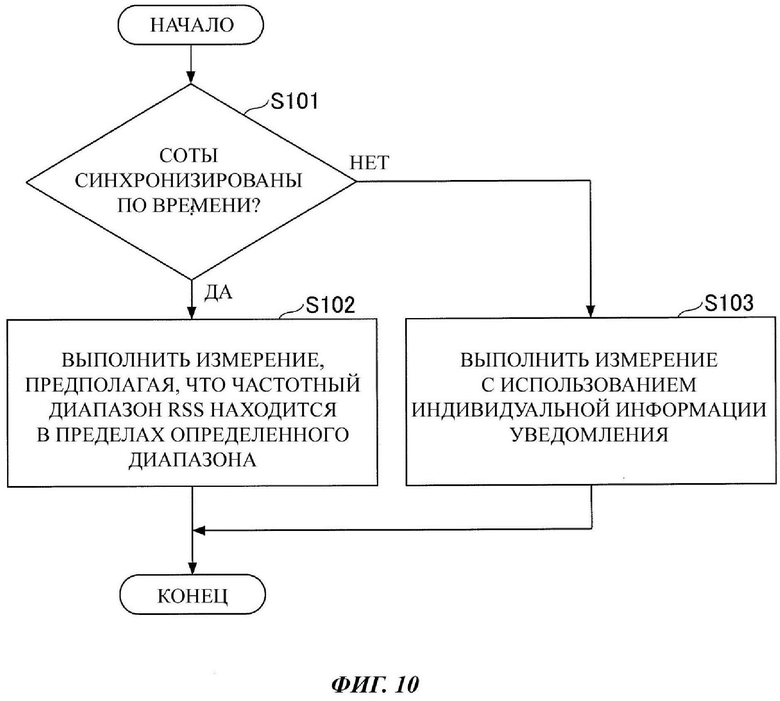
1. Терминал, содержащий:
контроллер, выполненный с возможностью, на основе информации о множестве соседних сот, определения положения ресурса сигнала ресинхронизации, которое не перекрывается по отношению к времени или частоте между соседними сотами, количество которых равно или меньше, чем заданное количество; и
приемник, выполненный с возможностью приема сигнала ресинхронизации соседней соты на основе указанного положения.
2. Терминал по п. 1, в котором информация о множестве соседних сот включает в себя идентификатор соты.
3. Терминал по п. 1, в котором информация о множестве соседних сот включает в себя информацию о том, возможно ли в каждой соте измерение с использованием сигнала ресинхронизации.
4. Система связи, содержащая:
терминал, содержащий:
контроллер, выполненный с возможностью, на основе информации о множестве соседних сот, определения положения ресурса сигнала ресинхронизации, которое не перекрывается по отношению к времени или частоте между соседними сотами, количество которых равно или меньше, чем заданное количество; и
приемник, выполненный с возможностью приема сигнала ресинхронизации соседней соты на основе указанного положения, и
базовую станцию, выполненную с возможностью передачи сигнала ресинхронизации в терминал.
5. Способ связи, выполняемый терминалом, включающий следующие этапы:
на основе информации о множестве соседних сот, определение положения ресурса сигнала ресинхронизации, которое не перекрывается по отношению к времени или частоте между соседними сотами, количество которых равно или меньше, чем заданное количество; и
прием сигнала ресинхронизации соседней соты на основе указанного положения.
| NOKIA, NOKIA SHANGHAI BELL, Use of RSS for measurement improvements, 3GPP TSG-RAN WG1 Meeting #98 (R1-1908299) Prague, CZ, 16.08.2019 (найден 15.03.2023), найден в Интернете https://www.3gpp.org/ftp/tsg_ran/WG1_RL1/TSGR1_98/Docs | |||
| ZTE, Use of RSS for measurement improvement, 3GPP TSG RAN WG1 Meeting #98 (R1-1908263) Prague, CZ, 17.08.2019 (найден |

