Изобретение относится к системе управления и регулирования для системы снижения уровня кислорода. Кроме того, изобретение относится к системе снижения уровня кислорода, содержащей такую систему управления и регулирования, а также к способу управления и/или регулирования системы снижения уровня кислорода.
На практике системы снижения уровня кислорода часто используются для профилактики и предотвращения пожаров. Эти системы позволяют снизить содержание кислорода в защищаемой области до уровня, который ниже предела воспламеняемости материалов. Концентрация кислорода снижается посредством подачи инертных газов или воздуха, обогащённого инертными газами, в частности азота или воздуха, обогащённого азотом, в защищаемую область. Таким образом регулируется соотношение инертного газа или воздуха, обогащённого инертным газом, к кислороду, что приводит к снижению содержания кислорода в воздухе в защищаемой области. При этом кислорода по-прежнему достаточно для того, чтобы люди могли оставаться в защищаемой области.
Для управления такой системой снижения уровня кислорода предусмотрены различные компоненты. Источник инертного газа, например генератор инертного газа, составляет ключевой компонент системы снижения содержания кислорода. Такой генератор инертного газа описан ниже в данной заявке в качестве генератора азота, который обычно разделяет сжатый атмосферный воздух на обогащённый азотом поток воздуха и обогащённый кислородом поток воздуха. Обогащённый азотом поток воздуха может иметь содержание азота, например, от 90,0 до 99,9%, и таким образом он используется для снижения содержания кислорода в защищаемой области. Работа таких генераторов азота может быть основана на принципе мембранного газоразделения или адсорбции при переменном давлении (например, «адсорбции при переменном давлении» (PSA) или «вакуумной адсорбции при переменном давлении» (VPSA)). Кроме того, управление системой снижения уровня кислорода требует по меньшей мере одного датчика концентрации кислорода, определяющего содержание кислорода в защищаемой области. Наконец, обычно предусмотрен по меньшей мере один исполнительный механизм, например клапан или реле, для включения и выключения компрессора, соединённого с генератором азота, для управления подачей формируемого азота или обогащённого азотом воздуха, соответственно, в защищаемую область. Дополнительные факультативные компоненты системы снижения уровня кислорода представляют собой, например, визуальные или акустические средства сигнализации для оповещения людей, которые могут быть поблизости в случае тревоги, например, если концентрация кислорода в защищаемой области падает ниже пороговой величины.
Для достижения заданного уровня кислорода принято регулировать отдельные компоненты системы снижения уровня кислорода. Для этой цели обычно предусмотрен центр управления, который, с одной стороны, соединён с генераторами азота и регулирует формирование азота в соответствии с необходимостью. С другой стороны, центр управления соединён с датчиками концентрации кислорода для обработки величин, которые они определяют, и передачи соответствующих требуемых значений объёма азота в генераторы азота. Центр управления может регулировать несколько защищаемых областей независимо друг от друга, причём каждой защищаемой области назначен один или более генераторов азота, и в каждой защищаемой области расположен один или более датчиков концентрации кислорода. Кроме того, центр управления соединён с множеством исполнительных механизмов для управления распределением формируемого азота в защищаемых помещениях.
По мере повышения сложности систем снижения уровня кислорода, например в зданиях с большими защищаемыми областями или большим количеством защищаемых областей, например на заводах, в складах и архивах, проблема состоит в необходимости безопасного и надёжного управления всеми компонентами системы снижения уровня кислорода. Центр управления должен быть сконструирован с обеспечением высокой вычислительной мощности и многочисленных интерфейсов для приспособления множества соединённых генераторов азота, датчиков концентрации кислорода и исполнительных механизмов; кроме того, монтаж и техническое обслуживание, а также устранение неисправностей в случае сбоев становятся очень сложными по мере увеличения размера системы. Даже простая прокладка кабелей питания и сигнальных проводов, которые порой являются очень длинными, между всеми компонентами и центром управления, является трудозатратной и дорогостоящей. Соответствующий стандартам линейный контроль всех проводов подачи питания на предмет блуждающих обрывов или блуждающих коротких замыканий также сложнее осуществить при увеличении количества проводов и увеличенной длине проводов. Модернизация и расширение системы снижения уровня кислорода также представляет собой сложную задачу с точки зрения прокладки кабелей и реконфигурации. Дополнительные трудности в управлении системами снижения уровня кислорода в настоящее время составляет реализация эффективного управления энергоснабжением и высокий уровень стабильности системы, требуемый нормативными документами по пожарной безопасности.
Таким образом, задача изобретения состоит в определении системы управления и регулирования для системы снижения уровня кислорода, которая обеспечивает сниженные расходы на производство, монтаж и техническое обслуживание, гарантирует более высокую стабильность системы и улучшенное управление энергоснабжением, и выполнена с возможностью гибкой адаптации и расширения. Дополнительная задача изобретения состоит в определении системы снижения уровня кислорода, содержащей такую систему управления и регулирования, а также в обеспечении способа работы для неё.
Согласно изобретению, эта задача решается в отношении системы управления и регулирования посредством объекта изобретения по пункту 1 формулы. В отношении системы снижения уровня кислорода и способа её работы эта задача решается объектами изобретения по пунктам 15 и 16 формулы.
Таким образом, изобретение основано на идее определения системы управления и регулирования для системы снижения уровня кислорода для уменьшения и поддержания уровня концентрации кислорода по меньшей мере в одной замкнутой защищаемой области, которая содержит по меньшей мере один генератор инертного газа, по меньшей мере один датчик концентрации кислорода и по меньшей мере один исполнительный механизм для выпуска инертного газа. Система управления и регулирования содержит множество осуществляющих сигнальную связь управляющих модулей. Каждый управляющий модуль предпочтительно выполнен с возможностью или является конфигурируемым таким образом, чтобы обеспечить возможность выполнения одной или более регулирующих функций. При этом регулирующие функции децентрализованно распределены между по меньшей мере двумя осуществляющими сигнальную связь управляющими модулями.
В этом смысле изобретение основано на основной концепции использования стандартизированных управляющих модулей, причём управляющим модулям могут быть назначены различные функции. Это обеспечивает модульность, которая позволяет системе управления и регулирования с лёгкостью и быстротой адаптироваться к различным требованиям, в частности к имеющим различные размеры или многочисленным защищаемым областям, а также к системам снижения уровня кислорода различной сложности. В дополнение к получаемой таким образом гибкости и упрощённой сертификации систем со стандартизированными компонентами, конструкция и функционирование управляющего модуля, специализированного для конкретных функций, упрощается по сравнению с конструкцией и функционированием имеющего широкую основу центра управления. Таким образом последующие расширения, модификации или минимизации также могут быть реализованы ценой небольших усилий. Управляющие модули могут быть с большей лёгкостью изготовлены и запрограммированы в виде стандартных узлов, и им также требуется меньше места в их соответствующих местах работы. Управляющие модули могут с большей лёгкостью обслуживаться и заменяться без влияния на общее функционирование системы снижения уровня кислорода. Кабели питания и сигнальные кабели могут быть собраны в жгуты, что, например, упрощает контроль кабелей. Децентрализованное распределение управляющих и регулирующих функций дополнительно повышает стабильность системы, поскольку, например, сбой управляющего модуля меньше влияет на общее функционирование системы снижения уровня кислорода.
С точки зрения аппаратного обеспечения отдельные управляющие модули могут иметь по существу одинаковую конструкцию. В частности, каждый из управляющих модулей может иметь, соответственно, такой же контроллер. Однако управляющие модули могут по меньшей мере частично различаться своими интерфейсами, чтобы быть способными, например, оптимально соединяться с точки зрения сигналов с различными видами исполнительных механизмов, таких как клапаны и средства оповещения, или с датчиками концентрации кислорода в защищаемой области. Эти различные интерфейсы могут быть предусмотрены в дополнение к одинаковому основному набору интерфейсов, общему для всех управляющих модулей. За счёт того, что каждый управляющий модуль способен принимать на себя различные регулирующие функции, управляющие модули могут быть модульно объединены друг с другом. Модульность в равной степени обеспечивается возможностью сборки различных сочетаний управляющих модулей для распределения различных функций по отдельности между упомянутыми сочетаниями для управления системой снижения уровня кислорода.
Регулирующие функции, которые могут быть реализованы в управляющих модулях, могут различаться. В частности, контроль концентрации кислорода в защищаемой области, формирование соответствующего количества инертного газа и выпуск сформированного объёма инертного газа в защищаемую область для регулирования в ней концентрации кислорода являются ключевыми функциями, которые в любом случае могут обеспечиваться в системе регулирования и управления и распределяются среди различных управляющих модулей. В частности, в случае системы снижения уровня кислорода, имеющей множество защищаемых областей, децентрализованное распределение регулирующих функций обеспечивает резервирование и расширяемость, которые невозможно с лёгкостью реализовать в случае ранее созданных централизованно управляемых систем.
Для ясности, в контексте настоящего документа указывается, что управляющие модули могут не только выполнять регулирующие функции; т.е. функции, имеющие манипулируемую переменную, на которую влияет или может влиять сигнальная обратная связь, но также и управляющие функции. Понятия «управляющий модуль» и «регулирующая функция» далее следует понимать в контексте настоящей заявки как сокращённые варианты понятий «модуль управления и регулирования», а также «функция управления и регулирования».
Один предпочтительный вариант выполнения изобретения предусматривает возможность модульного объединения друг с другом управляющих модулей. Таким образом каждый управляющий модуль может по-разному конфигурироваться или быть конфигурируемым посредством надлежащих пользовательских вводов через интерфейс ввода. В качестве интерфейса ввода возможны все допустимые человеко-машинные интерфейсы, например сенсорная панель управления, встроенная в управляющий модуль, интерфейс USB для импорта файла конфигурации с персонального компьютера (PC) поддержки, или даже, например, DIP или поворотные переключатели. По существу, таким образом любое множество в основном аналогичных управляющих модулей могут быть сигнально соединены друг с другом в соответствии с необходимостью. Соответственно необходимая или желаемая регулирующая функция может быть назначена отдельным управляющим модулям через надлежащую конфигурацию.
Дополнительный предпочтительный вариант выполнения изобретения предусматривает, что каждый управляющий модуль конфигурирован или является конфигурируемым таким образом, что по меньшей мере одна из следующих регулирующих функций может выполняться по меньшей мере одним управляющим модулем:
a) управление/регулирование формирования инертного газа, в частности посредством
- включения и выключения по меньшей мере одного генератора инертного газа, и/или
- оценки сигналов датчиков, в частности по меньшей мере одного датчика концентрации кислорода и/или другого газа, температуры, сигналов датчиков объёмного расхода и/или давления, соотнесённые по меньшей мере с одним генератором инертного газа, и/или
- приведения в действие исполнительных механизмов по меньшей мере одного генератора инертного газа;
b) контроль уровня концентрации кислорода в замкнутой контролируемой области и/или управление/регулирование уровня концентрации кислорода по меньшей мере в одной замкнутой защищаемой области, в частности посредством
- оценки сигналов датчиков, в частности по меньшей мере одного датчика концентрации кислорода и/или другого газа, температуры, сигналов датчиков объёмного расхода и/или давления, от датчиков, расположенных по меньшей мере в одной замкнутой контролируемой/защищаемой области, и/или оценки сигналов от дверных контактов, расположенных в контролируемой/защищаемой области, и/или
- запроса некоторого количества инертного газа от по меньшей мере одного генератора инертного газа, и/или
- приведения в действие исполнительных механизмов по меньшей мере в одной замкнутой контролируемой/защищаемой области, и/или
- приведения в действие дисплеев по меньшей мере в одной замкнутой контролируемой/защищаемой области или на ней, в частности для отображения значений измерения концентрации кислорода, и/или
- приведения в действие акустических и/или визуальных средств оповещения в случае тревоги;
c) координация связи между компонентами системы снижения уровня кислорода и/или координация связи с точками за пределами системы снижения уровня кислорода, в частности посредством
- распределения запросов на количества инертного газа по множеству генераторов инертного газа в соответствии с заданными критериями, и/или
- распределения формируемого инертного газа по множеству замкнутых защищаемых областей в соответствии с заданными критериями, и/или
- сбора и оценки по меньшей мере одного сигнала состояния, отказа и/или оповещения от по меньшей мере одного управляющего модуля, и/или
- формирования по меньшей мере одного сообщения состояния, отказа и/или оповещения, в частности для отображения на блоке управления и/или для перенаправления во внешнее местоположение, в частности непрерывно контролируемое человеком, и/или
- приведения в действие дисплеев, в частности для отображения значений измерения датчиков, и/или
- обеспечения удалённого доступа к системе снижения уровня кислорода.
Дополнительные факультативные регулирующие функции включают в себя, например, распределение вырабатываемого инертного газа во множество защищаемых областей, чисто профилактический контроль концентрации кислорода в смежных, утилитарных, аппаратных и служебных помещениях без ввода инертного газа для регулирования концентрации кислорода, контроль состояния окружающей среды, в частности климатических параметров за пределами защищаемых и контролируемых областей, оповещение при опасных условиях окружающей среды в защищаемых или контролируемых областях, управление отображением и/или уведомлением о сбоях в системе снижения уровня кислорода. Таким образом отдельные регулирующие функции могут быть децентрализованно распределены по различным управляющим модулям. В частности, отдельные управляющие модули могут выполнять множество из вышеупомянутых регулирующих функций, например для обеспечения резервирования. Это обеспечивает в особенности высокий уровень функциональной надёжности.
В общем случае, в качестве управляющих модулей могут быть предусмотрены контроллер процесса для управления или, соответственно, регулирования формирования инертного газа, контроллер области для контроля уровня концентрации кислорода в замкнутой контролируемой области и/или для управления/регулирования уровня концентрации кислорода по меньшей мере в одной замкнутой защищаемой области, и/или главный контроллер для координации связи между управляющими модулями и/или другими компонентами системы снижения уровня кислорода, и/или для координации связи с точками за пределами системы снижения уровня кислорода. Назначение управляющего модуля в качестве контроллера области, контроллера процесса или главного контроллера предпочтительно осуществляется посредством конфигурации, индивидуальной для клиента. Другими словами, контроллер области, контроллер процесса и главный контроллер могут по существу иметь одинаковую конструкцию, при этом управляющему модулю назначаются регулирующие функции посредством пользовательского ввода таким образом, что управляющий модуль функционирует в качестве контроллера области, контроллера процесса или главного контроллера. Регулирующие функции могут быть назначены при изначальном запуске или даже во время работы системы регулирования уровня кислорода.
Таким образом, в системе управления и регулирования могут быть предусмотрены, например, два управляющих модуля, при этом одному управляющему модулю, который расположен в защищаемой области, назначается функция контроллера области. Другому управляющему модулю, который расположен в генераторе инертного газа, может быть назначена функция контроллера процесса. Это назначение может быть выполнено после того, как управляющие модули смонтированы, так что при монтаже нет необходимости учитывать, какой управляющий модуль монтируется в определённом местоположении. Это упрощает процесс монтажа и снижает расходы. Кроме того, управляющие модули могут быть быстро и с лёгкостью заменены, за счёт чего снижаются расходы на хранение. Наконец, эта архитектура также обеспечивает возможность лёгкого и эффективного расширения системы управления и регулирования. Например, таким образом впоследствии может быть добавлена дополнительная защищаемая область, причём в таком случае необходимо смонтировать лишь один дополнительный управляющий модуль, который затем принимает на себя функцию контроллера дополнительной области. Также может быть добавлен, например, дополнительный генератор азота, снабжённый дополнительным управляющим модулем, который затем принимает на себя функцию дополнительного контроллера процесса. Также дополнительные управляющие модули могут быть добавлены независимо от расширения системы, например для дополнения существующего управляющего модуля с точки зрения резервирования по схеме n + 1 и, таким образом, для дополнительного повышения надёжности системы. Каждый дополнительный управляющий модуль может быть соответственно конфигурирован посредством пользовательского ввода. Программирование и перепрограммирование не является необходимым; фактически все управляющие модули имеют одинаковое основное программное обеспечение, за счёт чего регулирующие функции могут быстро и с лёгкостью назначаться при монтаже.
Предпочтительно изобретение предусматривает, что отдельные управляющие модули осуществляют сигнальную связь друг с другом таким образом, что осуществляется обмен данными. Таким образом отдельные управляющие модули могут осуществлять координацию друг с другом, например при управлении формированием инертного газа в зависимости от запросов, выдаваемых различными контроллерами областей.
В одной предпочтительной конфигурации системы управления и регулирования согласно изобретению предусмотрено множество контролируемых и/или защищаемых областей, причём каждой защищаемой области назначен по меньшей мере один контроллер области для управления или, соответственно, регулирования уровня концентрации кислорода в защищаемой области. В качестве альтернативы или дополнения, по меньшей мере один контроллер области может быть назначен каждой контролируемой области для контроля уровня концентрации кислорода в контролируемой области.
Защищаемую область обычно понимают как пространственно ограниченную или, соответственно, замкнутую область, в которой концентрация кислорода снижена для предотвращения пожара и регулируется в пределах заданного диапазона значений. Контролируемая область является пространственно ограниченной или, соответственно, замкнутой областью, в которой контролируется концентрация кислорода, хотя и не осуществляется регулирование подачи инертного газа. Контроль состоит исключительно, например, в определении утечек в системе трубопроводов и в формировании надлежащих оповещений. В качестве контролируемой области может быть установлено, например, служебное помещение, в котором расположен генератор инертного газа, а также смежное помещение или коридор, не содержащие каких-либо компонентов системы снижения уровня кислорода. Концентрация кислорода в этих помещениях не должна снижаться.
При этом регулирующая функция по оценке сигнала концентрации кислорода может использоваться как для регулирования концентрации кислорода в защищаемой области, так и для контроля контролируемого помещения. Однако во время контроля сигнал концентрации кислорода только сравнивают с ранее установленными пределами и выдают сигнал отказа или оповещения, если данные пределы превышены или не достигнуты. Во время упомянутого регулирования также выполняется сравнение заданного целевого значения и фактического значения концентрации кислорода, и при этом в то же самое время регулируется исполнительный механизм для выпуска инертного газа таким образом, чтобы поддерживать целевое значение насколько возможно постоянным. Например, клапан открывается или закрывается, или компрессор генератора инертного газа включается и выключается, соответственно, для начала или прекращения выпуска инертного газа.
Кроме того, в качестве управляющего модуля может быть предусмотрен комбинированный контроллер, включающий в себя регулирующие функции по меньшей мере двух управляющих модулей. Каждый из по меньшей мере двух управляющих модулей может быть конфигурирован или является конфигурируемым в качестве главного контроллера, контроллера процесса и/или контроллера области. Предпочтительно комбинированный контроллер принимает на себя или включает в себя регулирующие функции двух по-разному конфигурированных управляющих модулей, например главного контроллера и контроллера процесса. Данная реализация комбинированного контроллера может быть полезной в случае, например, небольших систем, имеющих одну защищаемую область и/или один генератор инертного газа, в которой меньшая сложность системы обеспечивает возможность частичной централизации децентрализованно распределённых регулирующих функций.
В общем случае, защищаемой области может быть назначено множество генераторов инертного газа. Такое назначение, в частности, имеет смысл, если защищаемая область является в особенности большой. В частности, в случае, если одну защищаемую область образуют большие залы, может быть целесообразным назначение множества генераторов инертного газа, чтобы иметь возможность постоянно обеспечивать достаточное количество инертного газа.
Обеспечение достаточного количества инертного газа также может быть реализовано системой снижения уровня кислорода, дополнительно имеющей один или более контейнеров с инертным газом, в которых хранится инертный газ, в частности азот. В качестве альтернативы, эти контейнеры с инертным газом также могут быть назначены другой системе противопожарной защиты, например системе пожаротушения на основе инертного газа. Такая система пожаротушения на основе инертного газа обеспечивает в особенности быстрое и более значительное снижение концентрации кислорода в защищаемой области для тушения пожара, который уже начался. В отличие от этого, система снижения уровня кислорода обеспечивает минимальное долговременное снижение концентрации кислорода в защищаемой области для предотвращения возникновения возгорания.
Контейнеры с инертным газом являются предпочтительно пополняемыми, в частности посредством инертного газа, обеспечиваемого генератором инертного газа. Для этой цели контейнеры с инертным газом в одном предпочтительном варианте выполнения являются соединёнными или соединяемыми по потоку по меньшей мере с одним генератором инертного газа через систему трубопроводов системы снижения уровня кислорода.
Кроме того, предпочтительно может быть предусмотрено, что система управления и регулирования согласно изобретению содержит управляющий модуль, выполненный в виде контроллера наполнения. Контроллер наполнения предпочтительно осуществляет сигнальную связь с исполнительными механизмами, в частности с управляемыми клапанами, системы трубопроводов системы снижения уровня кислорода для управляемой подачи инертного газа из по меньшей мере одного генератора инертного газа по меньшей мере в один контейнер с инертным газом.
Контейнер с инертным газом может быть образован баллоном со сжатым газом, наполненным или наполняемым азотом. В частности, множество баллонов со сжатым газом может быть объединено для формирования батареи баллонов. Батарея баллонов предпочтительно соединена с системой трубопроводов системы снижения уровня кислорода и имеет один или более управляющих клапанов, осуществляющих сигнальную связь по меньшей мере с одним управляющим модулем, в частности с контроллером наполнения.
Кроме того, по меньшей мере одному контейнеру с инертным газом и/или батарее баллонов может быть назначен по меньшей мере один датчик температуры и/или по меньшей мере один датчик давления. Датчик температуры и/или датчик давления предпочтительно осуществляют сигнальную связь с управляющим модулем, в частности с контроллером наполнения, для контроля (до)заправки контейнера с инертным газом/батареи баллонов инертным газом, и предпочтительно для управления/регулирования наполнения с компенсацией давления и компенсацией температуры.
Контроллер наполнения может быть обеспечен посредством надлежащего конфигурирования стандартизированного управляющего модуля. Дополнение системы снижения уровня кислорода одним или более дополнительными контейнерами с инертным газом или усиление системы снижения уровня кислорода контроллером наполнения в качестве дополнения к системе пожаротушения на основе инертного газа, соответственно, является вариантом, который может быть предложен для конкретного клиента. Вследствие модульности управляющих модулей этот вариант может быть с легкостью реализован при монтаже системы снижения уровня кислорода на месте у клиента. В любом случае, система управления и регулирования может быть конфигурирована посредством простого пользовательского ввода таким образом, что одному из управляющих модулей могут быть назначены регулирующие функции контроллера наполнения.
Главный контроллер, если он предусмотрен, в зависимости от обстоятельств, служит для координации управляющих модулей, в частности контроллера области и/или контроллера процесса и/или комбинированного контроллера, соответственно, назначаемых защищаемым областям и/или контролируемым областям. Главный контроллер предпочтительно соединён с контроллерами областей и контроллерами процесса через систему кольцевых шин, причём главный контроллер осуществляет координацию связи между другими управляющими модулями. Таким образом главный контроллер может назначать приоритеты для приведения в действие отдельных генераторов инертного газа. Для этой цели главный контроллер может, например, принимать запрос на инертный газ от контроллера области, который идентифицировал повышение концентрации кислорода в защищаемой области. На основании использования отдельных генераторов инертного газа главный контроллер может тогда приводить в действие тот контроллер процесса, который назначен генератору инертного газа, имеющего наиболее короткое время работы. Это позволяет оптимизировать использование генератора инертного газа.
Контроллер процесса может осуществлять сигнальную связь с генератором инертного газа таким образом, чтобы регулировать формирование инертного газа. В качестве альтернативы или дополнения, контроллер области может осуществлять сигнальную связь с датчиком концентрации кислорода таким образом, чтобы регулировать концентрацию кислорода в защищаемой области. Главный контроллер может осуществлять сигнальную связь с контроллером процесса и контроллером области для обеспечения и/или контроля связи с контроллером более высокого ранга. Таким образом упомянутые регулирующие функции распределены между контроллером процесса, контроллером области и главным контроллером. Однако данное распределение может динамически варьироваться во время работы системы управления и регулирования. Например, контроллер области может стать контроллером процесса, и/или контроллер процесса может по меньшей мере частично принять на себя функции главного контроллера. Это обеспечивается децентрализованной структурой и модульным распределением отдельных регулирующих функций.
Главный контроллер или управляющий модуль, конфигурированный в качестве главного контроллера, соответственно, может быть конфигурирован или быть конфигурируемым таким образом, чтобы принимать сообщения об отказах и/или сообщения оповещения от контроллера области и/или контроллера процесса и/или комбинированного контроллера и передавать их все вместе в пользовательский интерфейс или, соответственно, человеко-машинный интерфейс, например в блок управления или на панель управления, и/или во внешний компонент информирования о сбоях и/или оповещениях. Это позволяет осуществлять централизованный контроль сообщений о сбоях и оповещениях, например для центров управления или служб безопасности.
Отдельные управляющие модули предпочтительно размещены с пространственным разделением друг от друга. Это способствует стабильности системы, поскольку физическое воздействие на отдельные управляющие модули может привести лишь к пространственно ограниченным сбоям. Эти сбои могут компенсированы, например, другими управляющими модулями, принимающими на себя регулирующие функции. Пространственное распределение управляющих модулей дополнительно обеспечивает их улучшенную доступность, а также более короткие маршруты кабелей между управляющими модулями и компонентами системы снижения уровня кислорода.
Дополнительное повышение функциональной стабильности достигается тем, что управляющие модули предпочтительно являются динамически конфигурируемыми во время работы. В частности, первый управляющий модуль может при этом принимать на себя одну или более регулирующих функций второго управляющего модуля. Напротив, второй управляющий модуль может также принимать на себя одну или более регулирующих функций первого управляющего модуля. Таким образом, например, в случае отказа первого управляющего модуля второй управляющий модуль может принять на себя его регулирующую(ие) функцию(и) таким образом, что обеспечивается функциональная надёжность системы управления и регулирования в целом. Таким образом регулирующая функция может передаваться автоматически и, при необходимости, в контексте аварийного резервирования, ненагруженного резервирования или нагруженного резервирования таким образом, чтобы непрерывно гарантировать максимальную функциональную надёжность. Таким образом, для двух управляющих модулей, которые обмениваются друг с другом регулирующей информацией или заменяют друг друга, соответственно, не является абсолютно необходимым, чтобы они были изначально сконструированы в виде дублирующих управляющих модулей. Фактически управляющий модуль, который изначально выполняет одну или более регулирующих функций, также может принимать на себя дополнительную регулирующую функцию другого управляющего модуля, чтобы по меньшей мере частично компенсировать его отказ. Одним важным условием для динамической конфигурации и приёма регулирующих функций от других управляющих модулей является сигнальное соединение и, если это применимо, соединение с подачей питания, принимающего управление управляющего модуля с датчиками и исполнительными механизмами передающего управление управляющего модуля. Это соединение может, например, быть реализовано через соединительные каналы передающего управление управляющего модуля, а также между принимающим управление и передающим управление управляющим модулем, или может быть сконструировано в виде дополнительного резервного соединения между принимающим управление управляющим модулем и датчиками и исполнительными механизмами передающего управление управляющего модуля.
Таким образом первый управляющий модуль может изначально выполнять, например, регулирующую функцию по оценке сигнала концентрации кислорода. Второй управляющий модуль может реализовывать управление или регулирование генератора инертного газа в качестве контроллера процесса. Таким образом первый и второй управляющие модули функционируют в аварийном резервировании по отношению друг к другу. В случае отказа первого управляющего модуля второй управляющий модуль может принять на себя затронутую отказом функцию, в данном случае оценку сигнала концентрации кислорода от датчика концентрации кислорода, чтобы продолжить обеспечивать функциональную надёжность всей системы управления и регулирования. Также возможно, чтобы второй управляющий модуль не принимал на себя какую-либо дополнительную функцию в строгом смысле при отказе первого управляющего модуля, а скорее расширил свои функции на защищаемую область первого управляющего модуля, т.е. включил в область своего регулирования дополнительную защищаемую область. Аналогичным образом, контроллер процесса может, например, распространять свою функцию регулирования процесса на дополнительный генератор инертного газа. Возможность динамического конфигурирования отдельных управляющих модулей обеспечивает в особенности высокую степень функциональной надёжности при минимальных трудозатратах на монтаж.
Динамическое конфигурирование управляющих модулей во время работы может быть инициировано не только при отказе управляющего модуля, но также может, например, способствовать более равномерному использованию управляющих модулей. Например, может осуществляться экономия энергоресурсов за счёт перевода управляющего модуля с низким уровнем активного использования в неактивный режим с низким энергопотреблением и принятия другим управляющим модулем регулирующих функций управляющего модуля, находящегося в неактивном режиме.
В качестве альтернативы или дополнения, функциональная надёжность также может быть гарантирована за счёт того, что два управляющих модуля имеют одинаковый диапазон функций и осуществляют сигнальную связь друг с другом таким образом, чтобы сформировать по существу резервированную группу контроллеров. Даже если динамические модули являются динамически конфигурируемыми во время работы, и таким образом каждый управляющий модуль способен принимать на себя регулирующую функцию другого управляющего модуля, которая не была изначально назначена первому управляющему модулю, по-прежнему может гарантироваться дополнительная функциональная надёжность посредством резервированных групп контроллеров. Таким образом, например, два управляющих модуля могут иметь одинаковую конструкцию или иметь одинаковый диапазон функций, соответственно. В частности, два управляющих модуля, каждому из которых изначально назначены одинаковые регулирующие функции, могут осуществлять сигнальную связь друг с другом. Таким образом, например, два управляющих модуля, каждый из которых выполнен в виде контроллера области и выполняет регулирующие функции по приведению в действие исполнительного механизма для выпуска инертного газа, могут быть соединены друг с другом в группу резервированных контроллеров посредством одного или другого управляющего модуля, который управляет исполнительным механизмом. В случае отказа одного из двух контроллеров области, исполнительный механизм для выпуска инертного газа затем приводится в действие другим контроллером области из группы резервированных контроллеров. Для повышения энергоэффективности, управляющий модуль группы резервированных контроллеров может быть переведён в неактивный режим до тех пор, пока он не примет сигнал для принятия на себя регулирующих функций другого управляющего модуля.
Таким образом может быть конкретно обеспечено в другом варианте усовершенствования изобретения, что каждый из управляющих модулей, в частности управляющих модулей в группе контроллеров, конфигурирован и осуществляет сигнальную связь с другим таким образом, что управляющий модуль автоматически принимает на себя регулирующую функцию другого управляющего модуля, если тот испытывает сбой и/или перегрузку. Принятие на себя регулирующей функции в случае сбоя управляющего модуля служит для функциональной надёжности системы управления и регулирования в системе снижения уровня кислорода. В качестве альтернативы или дополнения, однако, система управления и регулирования также может быть адаптирована таким образом, что управляющие модули автоматически принимают на себя регулирующие функции других управляющих модулей, если последние испытывают перегрузку. Это может оптимизировать использование отдельных управляющих модулей. В общей сложности, таким образом может быть обеспечен высокий уровень эффективности посредством относительно небольшого количества управляющих модулей. Это, среди прочего, повышает эффективность системы снижения уровня кислорода в целом.
Чтобы гарантировать эффективную и скоростную связь между отдельными управляющими модулями, предпочтительно предусмотрено, что управляющие модули осуществляют сигнальную связь друг с другом через систему шин. Система шин предпочтительно выполнена в виде кольцевой системы шин таким образом, чтобы обеспечить резервирование каналов связи. В особенности высокая устойчивость системы обеспечивается кольцевой системой шин, поскольку обеспечивается возможность связи по резервированным каналам. Таким образом, потеря связи между двумя управляющими модулями может быть компенсирована путём установления связи через другие управляющие модули. Чтобы иметь возможность соединить управляющие модули с системой шин, предпочтительно, чтобы все управляющие модули имели одинаковые интерфейсы с шинами.
Дополнительное преимущество, обеспечиваемое системой шин, в частности кольцевой системой шин, состоит во взаимном контроле отдельных управляющих модулей. Стандартизированный интерфейс связи между отдельными управляющими модулями позволяет управляющим модулям контролировать состояние друг друга. Это позволяет быстро идентифицировать сбой или отказ управляющего модуля. В результате другой управляющий модуль может принимать на себя функцию испытывающего сбой или, соответственно, отказавшего управляющего модуля. Контроль отдельных управляющих модулей может быть обеспечен тем, что, например, отдельные управляющие модули отправляют сигналы состояния с заданными интервалами времени. Отдельные управляющие модули могут также отправлять «сигналы жизни».
Система шин может быть реализована, например, посредством соединения Ethernet по стандартным протоколам, таким как TCP/IP, Modbus/TCP, UDP, EtherCAT или Powerlink. Такой стандартизированный интерфейс связи дополнительно снижает расходы на изготовление и монтаж системы управления и регулирования.
Дополнительный предпочтительный вариант выполнения изобретения может обеспечивать соединение отдельных или всех управляющих модулей по меньшей мере с одним датчиком концентрации кислорода и/или по меньшей мере с одним исполнительным механизмом для выпуска инертного газа и/или по меньшей мере одним генератором инертного газа через дополнительную систему шин. В общем случае, отдельные или все датчики, исполнительные механизмы и/или генераторы инертного газа могут быть соединены с одним или более управляющими модулями через дополнительную систему шин, в особенности приспособленную к полевому уровню. В частности упомянутый по меньшей мере один датчик концентрации кислорода, но также и датчики газа, температуры и/или давления, а также дверные контакты могут быть интегрированы в дополнительную систему шин. При этом, в частности, может быть предусмотрено, что другая система шин является системой полевых шин, предпочтительно кольцевой и/или шлейфовой и/или звездообразной топографии. В дополнительной системе шин может использоваться, например, шина CAN или RS-485 с протоколом CANopen, Profibus или Modbus RTU.
Управляющие модули могут быть дополнительно осуществляют сигнальную связь или выполнены с возможностью осуществления сигнальной связи с блоком хранения и оценки данных, чтобы обеспечить возможность долгосрочного хранения и оценки системных данных, в частности параметров управления, данных датчиков, данных окружающей среды, данных энергопотребления и/или сообщений состояния, сообщений о сбоях и оповещений. Таким образом обеспечивается долговременная оценка, например, для профилактического технического обслуживания, или для определения надлежащих интервалов технического обслуживания, соответственно. Для этой цели могут быть использованы, например, статистические методы, чтобы оценить сохранённые параметры управления соответствующим образом. Сохранённые параметры управления могут дополнительно сравниваться друг с другом в различные моменты времени, например, для приёма раннего предупреждения об изменениях в генераторах инертного газа. Наконец, сохранённые данные также могут использоваться для компенсации дрейфа таким образом, что система управления и регулирования может быть адаптирована к постепенным изменениям окружающей среды, например к уровню загрязнения и/или изменяющейся степени чистоты подаваемых рабочих материалов.
Кроме того, предпочтительно, чтобы управляющие модули были способны к удалённому обслуживанию и/или конфигурированию, в частности через соединение сети Интернет. В общем случае, система управления и регулирования может быть снабжена компонентом связи для внешней связи, например, для удалённой диагностики или удалённого конфигурирования. Удалённое техническое обслуживание через соединение с сетью Интернет, в частности, приводит к снижению расходов на техническое обслуживание.
Что касается управляющих модулей, может быть предпочтительно предусмотрено, что каждый из них имеет функцию периферийного распознавания таким образом, что могут автоматически распознаваться тип и режим работы датчиков концентрации кислорода и/или исполнительных механизмов и/или других датчиков, соединённых с соответствующим управляющим модулем. Другими словами, управляющие модули обеспечивают самонастраивающееся соединение внешних датчиков или исполнительных механизмов.
Таким образом управляющие модули могут, в частности, иметь самоконфигурирующуюся конструкцию таким образом, что регулирующие функции автоматически активируются и/или деактивируются на основании соответствующего типа и режима работы соединённых датчиков концентрации кислорода и/или исполнительных механизмов и/или других датчиков. Например, тип генератора инертного газа, который соединён с управляющим модулем, может распознаваться на основании измерений объёмного расхода или измерений давления и/или количества или типа соединённых клапанов. Соответственно, могут быть получены заранее конфигурированные настройки для этого типа генератора инертного газа. В качестве альтернативы или дополнения, самоконфигурирование осуществляется посредством распознавания интерфейса. Таким образом управляющий модуль не осуществляет непосредственное распознавание соединённого датчика или исполнительного механизма, а распознаёт его интерфейс ввода/вывода. Поскольку каждый из датчиков и исполнительных механизмов использует конкретный тип и/или конкретное количество интерфейсов для входных и выходных данных, они могут быть надёжно идентифицированы. Самоконфигурирование в значительной степени упрощает монтаж системы управления и регулирования. Кроме того, техническое обслуживание системы управления и регулирования является очень простым, поскольку заменяемые компоненты автоматически распознаются.
Для обеспечения хорошего использования системы снижения уровня кислорода при одновременном обеспечении высокого уровня функциональной надёжности предпочтительно, чтобы по меньшей мере один управляющий модуль, в частности, контроллер процесса и/или главный контроллер, был конфигурирован таким образом, чтобы инертный газ распределялся в соответствии с заданными критериями. Упомянутый по меньшей мере один управляющий модуль может, в частности, быть конфигурированным для того, чтобы регулировать формирование инертного газа в каждом из генераторов инертного газа таким образом, что генераторы инертного газа работают в течение по существу одинаковых периодов времени. При приёме запроса на инертный газ для этого предпочтительно приводится в действие генератор инертного газа с самым коротким периодом работы. Выравнивание периодов времени работы повышает стабильность системы и гарантирует хорошее использование системы управления и регулирования. Кроме того, генераторы инертного газа могут обслуживаться одновременно или, соответственно, их компоненты, состояние которых ухудшается в зависимости от нагрузки, такие как мембраны или углеродное молекулярное сито, могут заменяться одновременно, таким образом снижая усилия, затрачиваемые на техническое обслуживание системы снижения уровня кислорода.
Дополнительный аспект изобретения относится к системе снижения уровня кислорода, в частности к противопожарной системе, содержащей систему управления и регулирования, описанную выше.
Также в пределах объёма настоящей заявки охарактеризован способ управления и/или регулирования системы снижения уровня кислорода, в частности системы снижения уровня кислорода, описанной выше, в котором один или более управляющих модулей выполнены с возможностью выполнения по меньшей мере одной из следующих регулирующих функций:
- управление/регулирование генератора инертного газа,
- оценка сигнала концентрации кислорода от датчика сигнала концентрации кислорода, и
- приведение в действие исполнительного механизма для выпуска инертного газа.
Таким образом различные регулирующие функции назначаются отдельным управляющим модулям во время работы, причём в случае отказа одного управляющего модуля другой управляющий модуль автоматически принимает на себя его регулирующую функцию.
Ниже изобретение будет пояснено более подробно на основании сопровождающих схематичных чертежей. На них показано:
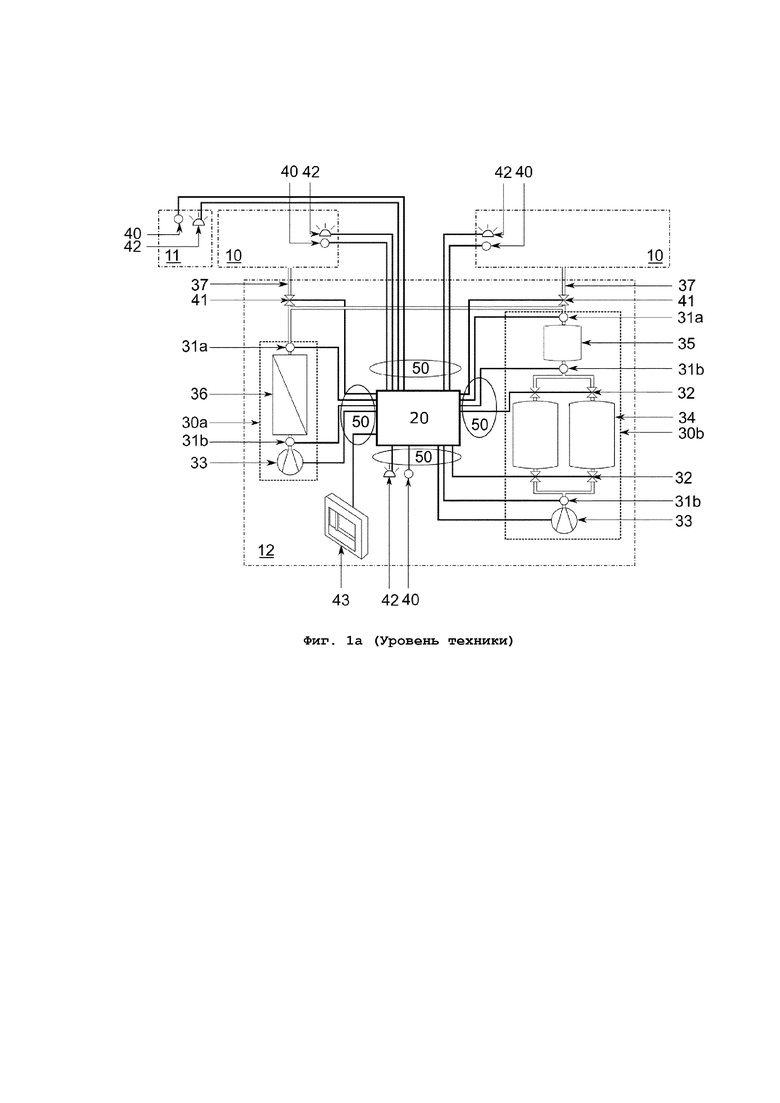
Фиг. 1a – схематичное представление системы снижения уровня кислорода, имеющей систему управления и регулирования согласно уровню техники;
Фиг. 1b – схематичное представление, упрощённое до сигнальных соединений системы управления и регулирования в системе снижения уровня кислорода согласно уровню техники;
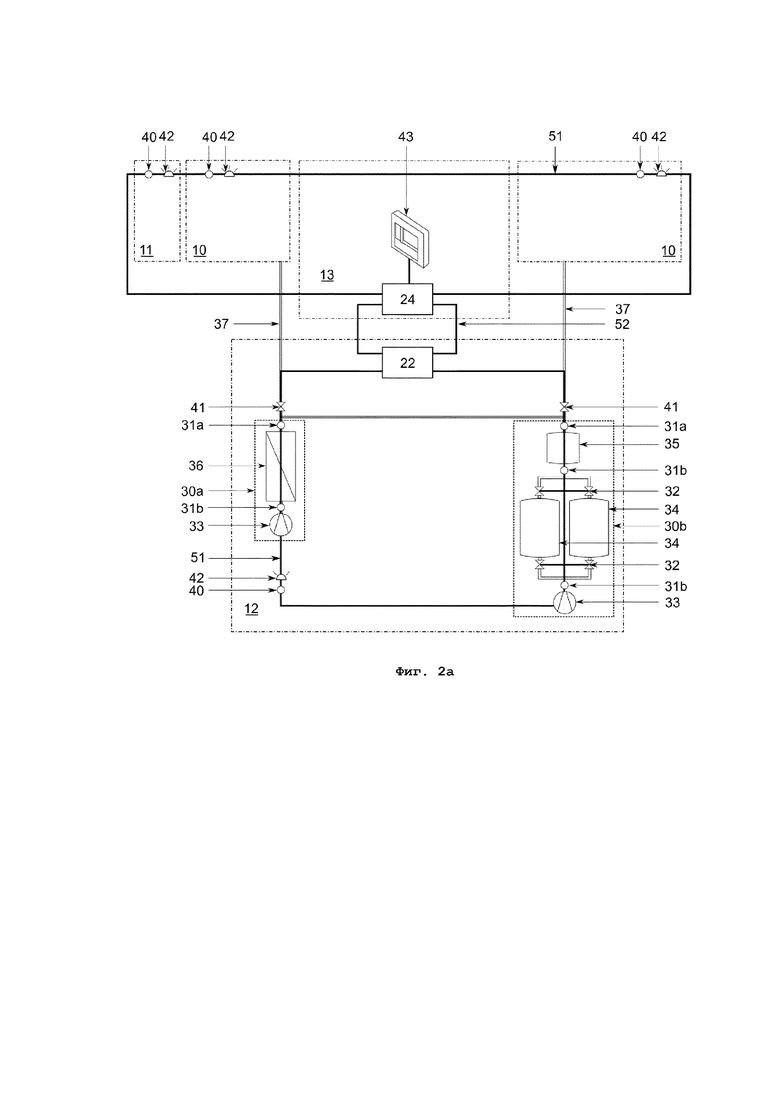
Фиг. 2a – схематичное представление системы снижения уровня кислорода, имеющей систему управления и регулирования согласно изобретению в соответствии с одним предпочтительным вариантом выполнения с двумя управляющими модулями;
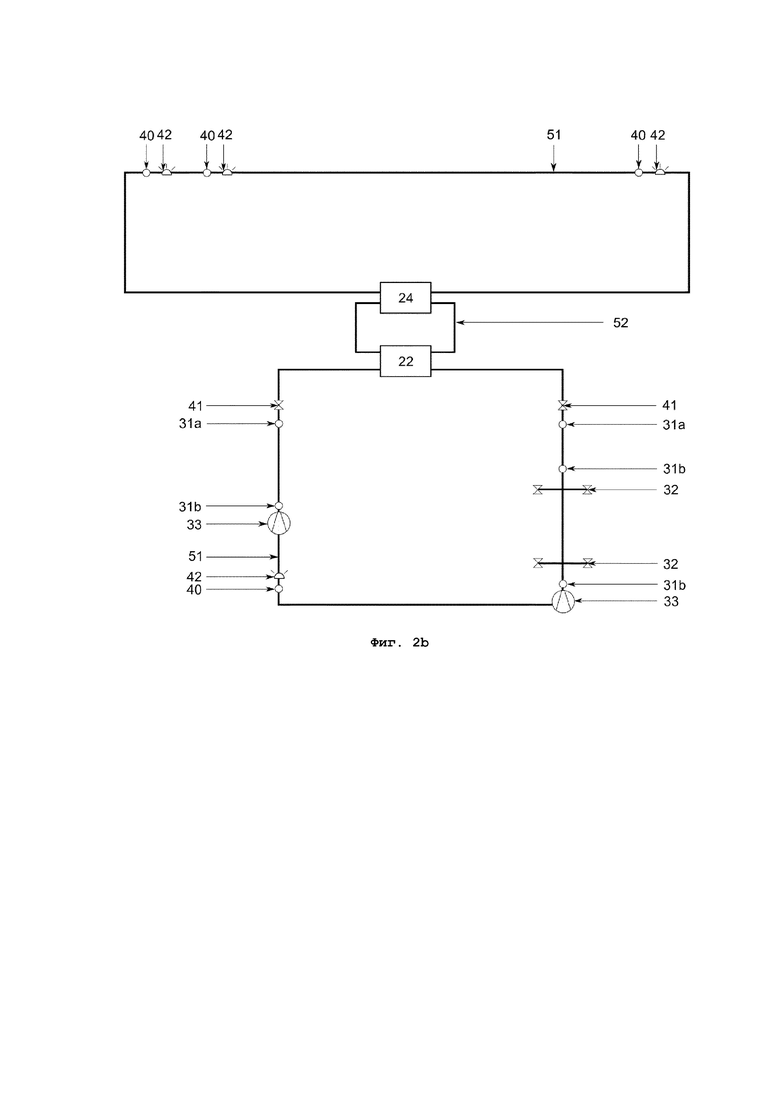
Фиг. 2b – схематичное представление, упрощённое до сигнальных соединений, системы управления и регулирования согласно изобретению в системе снижения уровня кислорода в соответствии с одним предпочтительным вариантом выполнения с двумя управляющими модулями;
Фиг. 3a – схематичное представление системы снижения уровня кислорода, имеющей систему управления и регулирования согласно изобретению в соответствии с другим предпочтительным вариантом выполнения с четырьмя управляющими модулями;
Фиг. 3b – схематичное представление, упрощённое до сигнальных соединений, системы управления и регулирования согласно изобретению в системе снижения уровня кислорода в соответствии с одним предпочтительным вариантом выполнения с четырьмя управляющими модулями;
Фиг. 4a – схематичное представление системы снижения уровня кислорода, имеющей систему управления и регулирования согласно другому предпочтительному варианту выполнения с шестью управляющими модулями;
Фиг. 4b – схематичное представление, упрощённое до сигнальных соединений, системы управления и регулирования согласно изобретению в системе снижения уровня кислорода согласно одному предпочтительному варианту выполнения с шестью управляющими модулями;
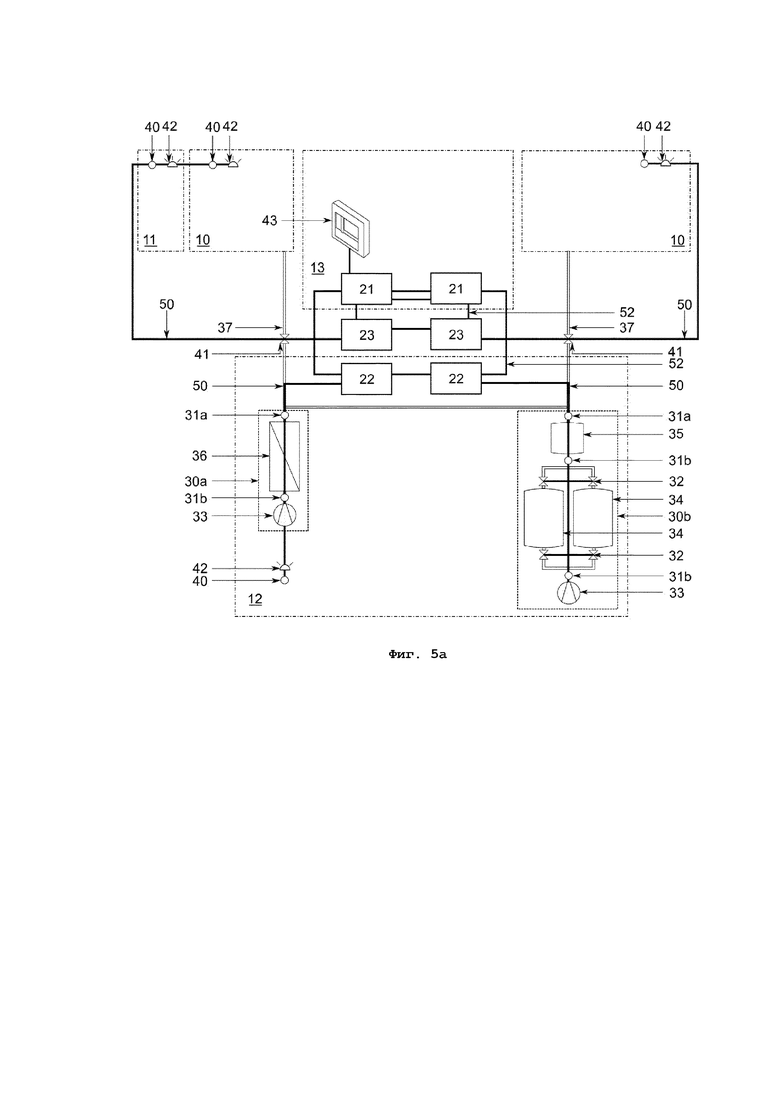
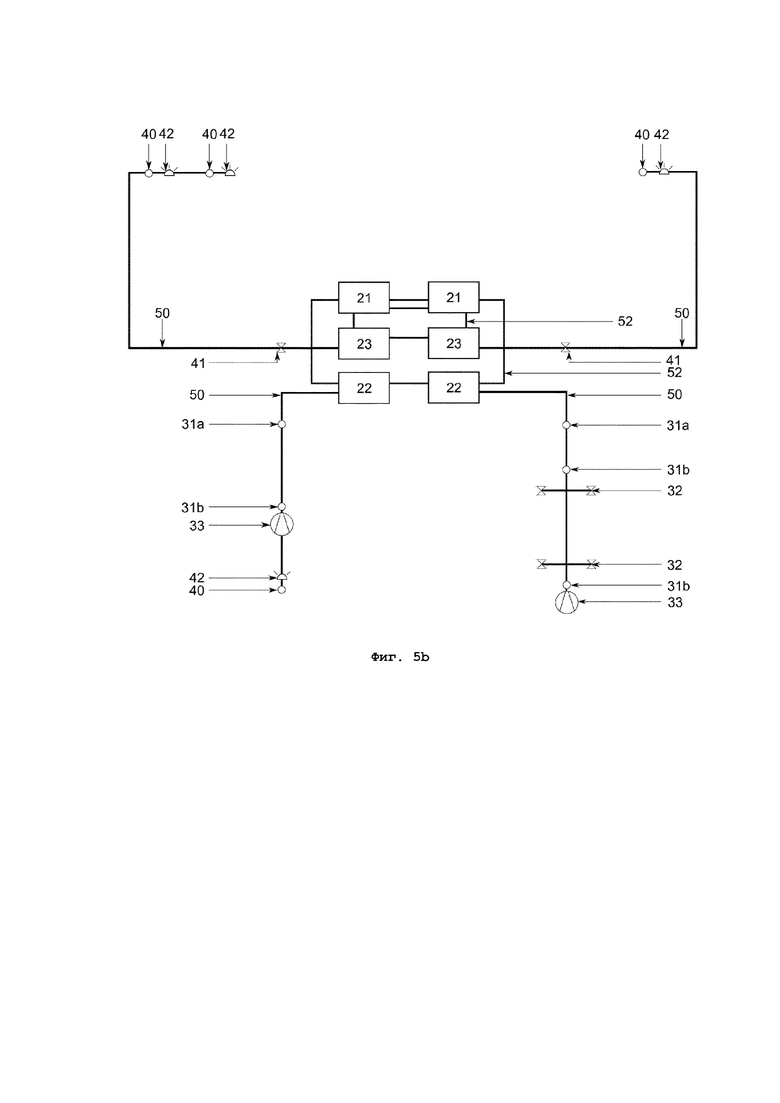
Фиг. 5a – схематичное представление системы снижения уровня кислорода, имеющей систему управления и регулирования согласно изобретению, в соответствии с другим предпочтительным вариантом выполнения с шестью управляющими модулями и полевыми тупиковыми питающими линиями; и
Фиг. 6 – схематичное представление системы снижения уровня кислорода, имеющей систему управления и регулирования согласно другому предпочтительному варианту выполнения с усовершенствованной связью.
Фиг. 1a, 2a, 3a, 4a, 5a и 6 показывают главным образом системы снижения уровня кислорода, имеющие аналогичную конструкцию, которые служат в качестве профилактических противопожарных систем для контроля и регулирования концентрации кислорода в защищаемых областях 10. Наиболее важными компонентами системы снижения уровня кислорода являются генераторы 30a, 30b инертного газа. Генератор 30a инертного газа согласно чертежам реализован в виде мембранного генератора азота и по существу содержит:
компрессор 33 для сжатия атмосферного воздуха;
датчик 31b давления для обнаружения давления сжатого атмосферного воздуха;
мембрану 36 для разделения атмосферного воздуха на обогащённый кислородом воздух, который выпускается по не показанному трубопроводу, и обогащённый азотом воздух, который вводится в одну из защищаемых областей 10 по трубопроводу 37 подачи азота; и
датчик 31a концентрации кислорода для измерения остаточного содержания кислорода в обогащённом азотом воздухе.
Вместо датчика 31a концентрации кислорода или в дополнение к нему при необходимости может быть предусмотрен датчик объёмного расхода дальше по ходу от мембраны 36.
Генератор 30b инертного газа, показанный на чертежах, реализован в виде генератора азота на основе адсорбции при переменном давлении и по существу содержит:
компрессор 33 для сжатия атмосферного воздуха;
датчик 31b давления для обнаружения давления сжатого атмосферного воздуха;
контейнер 34 с адсорбентом, например содержащий углеродное молекулярное сито, для разделения атмосферного воздуха на обогащённый кислородом воздух, который выпускается по не показанному трубопроводу, и обогащённый азотом воздух, который вводится в одну из защищаемых областей 10 по трубопроводу 37 подачи азота; и
буферный резервуар 35 для временного хранения обогащённого азотом воздуха;
клапаны 32 для попеременной подачи атмосферного воздуха в контейнер 34 с адсорбентом или обогащённого азотом воздуха из контейнера 34 с адсорбентом в буферный резервуар 35, соответственно;
датчик 31b давления для обнаружения давления обогащённого азотом воздуха; и
датчик 31a концентрации кислорода для измерения остаточного содержания кислорода в обогащённом азотом воздухе.
Вместо датчика 31a концентрации кислорода или в дополнение к нему при необходимости может быть предусмотрен датчик объёмного расхода дальше по ходу от буферного резервуара 35.
Обогащённый азотом воздух, формируемый генераторами 30a, 30b инертного газа, вводится по необходимости в защищаемые области 10 через селекторные клапаны 41 для снижения содержания кислорода в воздухе в защищаемых областях 10. Содержание кислорода в защищаемых областях 10, а также, например, в контролируемых помещениях 11, например, в смежном коридоре или в машинных залах 12, в которых расположены генераторы 30a, 30b инертного газа, контролируется датчиками 40 концентрации кислорода. В случае критических окружающих условий, например при снижении содержания кислорода ниже порогового значения, средство 42 оповещения приводится в действие в затронутой области и потенциально также в других областях для оповещения любых людей, которые могут там присутствовать. Конечно, в защищаемых областях 10, контролируемых областях 11 и машинных залах 12, а также в генераторах 30a, 30b также могут быть предусмотрены дополнительные датчики, например датчики температуры, влажности и газа. Также частью системы снижения уровня кислорода могут быть другие виды исполнительных механизмов, такие как приводные исполнительные механизмы. Управляющие и регулирующие функции системы снижения уровня кислорода могут контролироваться и управляться посредством панели 43 управления в качестве человеко-машинного интерфейса.
На Фиг. 1a – 6 показаны различные управляющие и регулирующие системы для обеспечения возможности работы системы снижения уровня кислорода. Фиг. 1a, 2a, 3a, 4a и 5a при этом показывают системы управления и регулирования в связи с другими компонентами системы снижения уровня кислорода. Напротив, на Фиг. 1b, 2b, 3b, 4b и 5b показаны только сигнальные соединения систем управления и регулирования с датчиками и исполнительными механизмами. При этом они служат для обеспечения лучшего обзора архитектуры соответствующей системы управления и регулирования.
На Фиг. 1a и 1b показана система управления и регулирования системы снижения уровня кислорода в соответствии с уровнем техники. Такие системы для систем снижения уровня кислорода до сегодняшнего дня реализовывались с центром 20 управления, соединённым в звездообразной конфигурации с отдельными датчиками 31a, 31b, 40, исполнительными механизмами 32, 33, 41 и средствами 42 оповещения посредством полевых тупиковых питающих линий 50. Как явно видно на Фиг. 1a и 1b, отдельные соединения между центром 20 управления и датчиками 31a, 31b, 40, исполнительными механизмами 32, 33, 41 и средством 42 оповещения образуют сложную архитектуру линий, в частности, с большим количеством отдельных линий, большой протяжённостью линий и в результате повышенной подверженностью отказам. Сам центр 20 управления необходимо конфигурировать с высокой вычислительной мощностью и множеством интерфейсов для обеспечения возможности надёжного выполнения всех управляющих и регулирующих функций. Последующее расширение, реконфигурация, а также устранение неполадок в случае возникновения сообщений о сбоях оказываются трудоёмкими, а также временнозатратными и дорогостоящими.
На Фиг. 2a – 6 показаны варианты системы управления и регулирования согласно изобретению. Все примерные варианты выполнения изобретения содержат по меньшей мере два управляющих модуля 21, 22, 23, 24, 25, среди которых децентрализованно распределены одна или более регулирующих функций системы управления и регулирования. Управляющие модули 21, 22, 23, 24, 25 предпочтительно имеют стандартизированную конструкцию, таким образом имея по существу одинаковые аппаратные компоненты. Каждый управляющий модуль 21, 22, 23, 24, 25, в частности, содержит аналогичные или сравнимые контроллеры, а также по меньшей мере частично аналогичные или сравнимые интерфейсы связи. Управляющие модули 21, 22, 23, 24, 25 осуществляют сигнальную связь друг с другом и предпочтительно имеют различную конфигурацию. В частности, различные регулирующие функции могут быть разделены среди отдельных управляющих модулей 21, 22, 23, 24, 25.
В примерном варианте выполнения согласно Фиг. 2a, 2b показана, например, система управления и регулирования, имеющая два управляющих модуля 22, 24. Таким образом, в частности, предусмотрен комбинированный контроллер 24, который объединяет регулирующие функции контроллера области и главного контроллера и, вследствие этого, он принимает на себя контроль уровней концентрации кислорода в защищаемых областях 10, с одной стороны, и, с другой стороны, координацию связи между управляющими модулями 22, 24 и другими компонентами системы снижения уровня кислорода. Другой управляющий модуль является управляющим модулем, конфигурированным в виде контроллера 22 процесса для управления или, соответственно, регулирования формирования инертного газа упомянутыми двумя генераторами 30a, 30b инертного газа. Комбинированный контроллер 24 и контроллер 22 процесса пространственно отделены друг от друга. Контроллер 22 процесса расположен в машинном зале 12, в котором также расположены два генератора 30a, 30b инертного газа. С другой стороны, комбинированный контроллер 24 расположен в отдельном подсобном помещении 13. Пространственное разделение двух управляющих модулей 22, 24 повышает стабильность системы, сокращает протяжённость линий и повышает доступность управляющих модулей 22, 24.
Для своей функции контроллера области комбинированный контроллер 24 соединён с датчиками 40 концентрации кислорода и средствами 42 оповещения в защищаемых областях 10, а также в контролируемой области 11. При помощи датчиков 40 концентрации кислорода комбинированный контроллер 24 определяет концентрацию кислорода в атмосфере защищаемых областей 10 и контролируемой области 11. Что касается регулирования концентрации кислорода в защищаемых областях 10, комбинированный контроллер 24 передаёт запрос на азот в контроллер 22 процесса, который адаптирует формирование инертного газа к переданному запросу на азот и координирует введение обогащённого азотом воздуха, например посредством приведения в действие селекторных клапанов 41. В качестве альтернативы, селекторные клапаны могут быть приведены в действие контроллером области, как только он обнаружит запрос на азот. Контроллер 22 процесса, в свою очередь, осуществляет сигнальную связь с датчиками 31a, 31b давления и концентрации кислорода, а также исполнительными механизмами, такими как компрессоры 33 и клапаны 32 генератора 30a, 30b инертного газа для управления и регулирования формирования инертного газа. Контроллер 22 процесса, однако, не ограничен функцией формирования инертного газа; в настоящем примерном варианте выполнения он также принимает на себя функцию контроллера области для машинного зала 12 посредством контроля концентрации кислорода в машинном зале 12 посредством датчика 40 концентрации кислорода и, если необходимо, приведения в действие средства 42 оповещения в машинном зале 12 при приближении к пороговому значению содержания кислорода, указывающему на утечку в генераторе 30a, 30b инертного газа. Эта в высокой степени индивидуальная конфигурация управляющих модулей 22, 24, адаптируемая к широкому спектру требований, позволяет распределять функции системы управления и регулирования на отвечающей потребностям и оптимальной основе в отношении линейной архитектуры.
В отличие от уровня техники, соединительные каналы между управляющими модулями 22, 24 и связанными с ними датчиками 31a, 31b, 40, исполнительными механизмами 32, 33, 41 и средствами 42 оповещения реализованы в виде полевых кольцевых линий 51. Кольцевая конфигурация может уменьшить линейные каналы и избыточные соединительные каналы дополнительно повышает стабильность системы. Связь через полевые кольцевые линии 51 может быть обеспечена, например, посредством шины CAN или посредством RS-485 с протоколом CANopen, Profibus или Modbus RTU. Комбинированный контроллер 24 и контроллер 22 процесса дополнительно осуществляют связь через дополнительную управляющую кольцевую линию 52, реализованную, например, в виде соединения Ethernet. Комбинированный контроллер 24 дополнительно находится в тупиковом соединении с панелью 43 управления, посредством которой пользователь может контролировать управляющие и регулирующие функции и управлять ими.
На Фиг. 3a, 3b показан другой примерный вариант выполнения изобретения, в котором предусмотрены в общей сложности четыре управляющих модуля 21, 25. Два соответствующих управляющих модуля образуют один главный контроллер 21. Они осуществляют сигнальную связь друг с другом, в частности посредством управляющей кольцевой линии 52. Два комбинированных контроллера 25, которые в этом примерном варианте выполнения объединяют функции контроллера области и контроллера процесса, дополнительно размещены в управляющей кольцевой линии 52. Главный контроллер 21 и комбинированный контроллер 25 в этом случае выполнены в виде резервированных управляющих модуля 21, 25, каждый из которых образует одну соответствующую группу контроллеров и обеспечивает повышенную стабильность системы вследствие резервированной структуры. Комбинированные контроллеры 25 осуществляют сигнальную связь с датчиками 31a, 31b, 40, исполнительными механизмами 32, 33, 41 и средствами 42 оповещения генераторов 30a, 30b инертного газа, защищаемых областей 10, контролируемой области 11 и машинного зала 12 посредством кольцевых полевых линий 51. Таким образом они координируют формирование инертного газа посредством генераторов 30a, 30b инертного газа, а также контроль и регулирование концентрации кислорода в отдельных областях 10, 11, 12. С другой стороны, главные контроллеры 21 в подсобном помещении 13 отвечают за координацию связи управляющих модулей 21, 25, а также за отображение сообщений о сбоях и оповещениях или, соответственно, приём пользовательского ввода посредством панели 43 управления. Примерный вариант выполнения согласно Фиг. 3a, 3b характеризуется в целом высокой степенью резервирования и, таким образом, функциональной стабильностью. В случае сбоя одного из управляющих модулей 21, 25, управляющий модуль 21, 25 не только такой же конструкции, но также и такой же конфигурации может принимать на себя все функции другого управляющего модуля 21, 25. Ввиду того, что две соответствующих кольцевых линии совместно используются обоими резервированными управляющими модулями 21, 25, каждый управляющий модуль 21, 25 может непосредственно осуществлять доступ к датчикам 31a, 31b, 40, исполнительным механизмам 32, 33, 41 и средствам 42 оповещения другого управляющего модуля 21, 25 без какого-либо обхода.
На Фиг. 4a, 4b показана аналогичная архитектура системы управления и регулирования в соответствии с другим предпочтительным примерным вариантом выполнения. Более конкретно, система управления и регулирования по Фиг. 4 аналогичным образом содержит два главных контроллера 21 в подсобном помещении 13, которые осуществляют сигнальную связь друг с другом и образуют резервированную группу контроллеров. Главные контроллеры 21 отвечают за координацию связи управляющих модулей 21, 22, 23, а также за отображение сообщений о сбоях и оповещениях или, соответственно, приём пользовательских вводов посредством панели 43 управления. В отличие от примерного варианта выполнения в соответствии с Фиг. 3a, 3b, комбинированный контроллер не предусмотрен. Вместо этого система управления и регулирования содержит два отдельных контроллера 23 области, а также два отдельных контроллера 22 процесса. Контроллеры 23 области служат для контроля концентрации кислорода в защищаемых областях 10 и в контролируемой области 11. Контроллеры 23 области для этой цели осуществляют сигнальную связь с датчиками 40 концентрации кислорода в областях 10, 11, и могут также приводить в действие средства 42 оповещения, расположенные в этих областях 10, 11 в случае отказа или оповещения, такого как, например, неполезный для здоровья уровень концентрации кислорода. Контроллеры 22 процесса служат для управления и регулирования формирования инертного газа генераторами 30a, 30b инертного газа, и для этой цели они осуществляют сигнальную связь с датчиками 31a, 31b давления и концентрации кислорода, а также с клапанами 32, компрессорами 33 и селекторными клапанами 41. Кроме того, в показанном примерном варианте выполнения они выполняют дополнительную функцию контроллера области по отношению к машинному залу 12. Контроллеры 23 области и контроллеры 22 процесса не осуществляют связь непосредственно друг с другом, а вместо этого они совместно соединены с главным контроллером 21 посредством двух управляющих кольцевых линий 52. Таким образом становится ясно, что главные контроллеры 21 принимают на себя координацию связи, например обработку запроса на азот, определяемого контроллерами 23 области, и его передачу в контроллеры 22 процесса. Примерный вариант выполнения по Фиг. 4a и 4b не только характеризуется ещё большим резервированием и устойчивостью системы по сравнению с примерным вариантом выполнения по Фиг. 3a, 3b, но также отличается особенной пригодностью для очень больших или сложных систем снижения уровня кислорода с высокими потребностями в управлении и регулировании на уровнях формирования инертного газа, контроля области и связи более высокого порядка.
Примерный вариант выполнения по Фиг. 5a, 5b отличается от примерного варианта выполнения по Фиг. 4a, 4b тем, что датчики 40 и исполнительные механизмы 42 или генераторы 30a, 30b инертного газа, соответственно, соединены с контроллерами 23 области/контроллерами 22 процесса. Более конкретно, в этом примерном варианте выполнения вместо полевых кольцевых линий предусмотрены полевые тупиковые линии 50. Это исключает дублированное соединение датчиков и исполнительных механизмов и таким образом является сравнительно экономичным. Кроме того, в этом примере селекторные клапаны 41 приводятся в действие контроллерами 23 области.
На Фиг. 6 показано усовершенствование примерного варианта выполнения по Фиг. 5a, 5b. Более конкретно, система управления и регулирования имеет структуру, аналогичную примерному варианту выполнения по Фиг. 5a, 5b. В общей сложности, предусмотрены два имеющих резервированную структуру главных контроллера 21, два имеющих резервированную структуру контроллера 23 области и два имеющих резервированную структуру контроллера 22 процесса. Контроллеру 23 области и контроллеры 22 процесса осуществляют сигнальную связь с главными контроллерами 21 посредством управляющих кольцевых линий 52.
На Фиг. 6 дополнительно показаны дополнительные интерфейсы связи, которые могут быть предусмотрены по меньшей мере в одном из главных контроллеров 21. Например, главный контроллер 21 может иметь интерфейс ввода для метеостанции 67. Таким образом текущие условия окружающей среды, относящиеся к внешней атмосфере, например величины скорости ветра, могут быть включены в регулирование системы снижения уровня кислорода. Кроме того, может быть предусмотрен сигнальный выход, который осуществляет связь с постоянно обитаемым местоположением 68. Это позволяет перенаправлять сообщения об оповещениях и сбоях надлежащим получателям для принятия контрмер.
Кроме того, могут быть предусмотрены функции для удалённого технического обслуживания или удалённого конфигурирования. Например, блок 60 коммутации связи («коммутатор») управляет связью с различными внешними устройствами, такими как, например, модуль 63 удалённой диагностики, который, в свою очередь, может быть соединён с внешним удалённым персональным компьютером (РС) 66 поддержки через маршрутизатор 64 WLAN или через Интернет 65 или с локальным РC 62 поддержки. Также локально размещённый блок 61 хранения и оценки данных, например промышленный PC или сервер, может служить для регистрации всех операционных данных и, в частности, для долгосрочной оценки системных данных, таких как, например, параметры управления, данные датчиков, данные окружающей среды, данные и/или состояние энергопотребления, сообщения о сбоях и оповещениях. Таким образом это позволяет, например, осуществлять профилактическое техническое обслуживание или определять надлежащие интервалы технического обслуживания.
В общем случае, система управления и регулирования согласно вышеописанным примерным вариантам выполнения может быть расширена по существу произвольно. В частности, могут быть предусмотрены множество главных контроллеров 21, множество контроллеров 23 области, множество контроллеров 22 процесса и/или множество комбинированных контроллеров 24, 25.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЖАРОВЗРЫВОЗАЩИТЫ ИНДИВИДУАЛЬНЫХ ЖИЛЫХ ДОМОВ И КВАРТИР С ПОМОЩЬЮ СПЛИТ-СИСТЕМ | 2019 |
|
RU2703884C1 |
| СПОСОБ ВЕРИФИКАЦИИ ДЛЯ СИСТЕМЫ УМЕНЬШЕНИЯ КИСЛОРОДА | 2020 |
|
RU2811414C2 |
| СИСТЕМА И СПОСОБ ПРЕДОТВРАЩЕНИЯ ВЗРЫВА ГАЗА В УГОЛЬНЫХ ШАХТАХ | 2013 |
|
RU2583964C2 |
| Система противопожарной вентиляции закрытых помещений воздухом гипоксического состава | 2021 |
|
RU2756263C1 |
| МОДУЛЬ УПРАВЛЕНИЯ И МОНИТОРИНГА | 2018 |
|
RU2770312C2 |
| ПРОТИВОПОЖАРНАЯ СИСТЕМА (ВАРИАНТЫ) И СПОСОБ РАБОТЫ ЭТОЙ СИСТЕМЫ | 2010 |
|
RU2422179C1 |
| СПОСОБ ПРОВЕДЕНИЯ КИСЛОРОДНОЙ ТЕРАПИИ (ОКСИГЕНОТЕРАПИИ) С ПРИМЕНЕНИЕМ АВТОМАТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ МЕЖДУ ПАЦИЕНТОМ И ОБОРУДОВАНИЕМ И СИСТЕМА РЕАЛИЗАЦИИ СПОСОБА | 2023 |
|
RU2820730C1 |
| СПОСОБ УПРАВЛЕНИЯ ОТНОШЕНИЕМ ЧИСТОТА/РАСХОД ИНЕРТНОГО ГАЗА, НАГНЕТАЕМОГО В ТОПЛИВНЫЙ БАК, А ТАКЖЕ СИСТЕМА ИНЕРТИРОВАНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2741154C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОТЕЛЬНОЙ | 2017 |
|
RU2656670C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ГАЗОВОЙ СИСТЕМОЙ И ЯДЕРНАЯ РЕАКТОРНАЯ УСТАНОВКА | 2014 |
|
RU2580926C1 |






Изобретение относится к системе управления и регулирования для системы снижения уровня кислорода, содержащей по меньшей мере один генератор инертного газа, по меньшей мере один датчик концентрации кислорода, по меньшей мере один исполнительный механизм для выпуска инертного газа, причём система управления и регулирования содержит множество осуществляющих сигнальную связь управляющих модулей, каждый из которых конфигурирован или является конфигурируемым таким образом, чтобы обеспечить возможность выполнения одной или более регулирующих функций, причём регулирующие функции децентрализованно распределены между по меньшей мере двумя осуществляющими сигнальную связь управляющими модулями. Также описаны система снижения уровня кислорода и способ управления и/или регулирования системы снижения уровня кислорода. 3 н. и 12 з.п. ф-лы, 6 ил.
1. Система управления и регулирования для системы снижения уровня кислорода для снижения и поддержания уровня концентрации кислорода по меньшей мере в одной замкнутой защищаемой области, содержащая:
- по меньшей мере один генератор (30a, 30b) инертного газа,
- по меньшей мере один датчик (31a, 40) концентрации кислорода,
- по меньшей мере один исполнительный механизм (32, 33, 41) для выпуска инертного газа,
причём система управления и регулирования содержит множество осуществляющих сигнальную связь управляющих модулей (21, 22, 23, 24, 25), каждый из которых выполнен с возможностью или является конфигурируемым таким образом, чтобы обеспечить возможность выполнения одной или более регулирующих функций, причём регулирующие функции децентрализованно распределены между по меньшей мере двумя осуществляющими сигнальную связь управляющими модулями,
причём контроллер (23) области для контроля концентрации кислорода в замкнутой контролируемой области (11) и/или для управления и/или регулирования уровня концентрации кислорода по меньшей мере в одной замкнутой защищаемой области (10) выполнен в виде управляющего модуля (21, 22, 23, 24, 25),
и при этом главный контроллер (21) для координации связи между компонентами системы снижения содержания кислорода и/или координации связи с точками за пределами системы снижения уровня кислорода выполнен в виде управляющего модуля (21, 22, 23, 24, 25),
управляющие модули (21, 22, 23, 24, 25) являются динамически конфигурируемыми во время работы, причём, в частности, первый управляющий модуль (21, 22, 23, 24, 25) может принимать на себя одну или более регулирующие функции второго управляющего модуля (21, 22, 23, 24, 25), и наоборот.
2. Система управления и регулирования по п. 1,
отличающаяся тем, что
управляющие модули (21, 22, 23, 24, 25) выполнены с возможностью модульного объединения друг с другом, причём каждый из управляющих модулей (21, 22, 23, 24, 25) по-разному конфигурирован или является конфигурируемым посредством надлежащих пользовательских вводов через интерфейс ввода.
3. Система управления и регулирования по п. 1 или 2,
отличающаяся тем, что
каждый управляющий модуль (21, 22, 23, 24, 25) конфигурирован или является конфигурируемым таким образом, что по меньшей мере одна из следующих регулирующих функций может быть выполнена посредством по меньшей мере одного соответствующего управляющего модуля (21, 22, 23, 24, 25):
a) управление и/или регулирование формирования инертного газа, в частности посредством
- включения и выключения по меньшей мере одного генератора инертного газа (30a, 30b) и/или
- оценки сигналов датчиков, в частности по меньшей мере одного датчика (31a, 40) концентрации кислорода и/или дополнительных датчиков (31b) газа, температуры, объёмного расхода и/или давления, назначенных по меньшей мере одному генератору (30a, 30b) инертного газа, и/или
- приведения в действие исполнительных механизмов (32, 33, 41) упомянутого по меньшей мере одного генератора (30a, 30b) инертного газа;
b) контроль уровня концентрации кислорода в замкнутой контролируемой области (11) и/или управления и/или регулирования уровня концентрации кислорода в упомянутой по меньшей мере одной замкнутой защищаемой области (10), в частности посредством
- оценки сигналов датчиков, в частности по меньшей мере одного датчика (31a, 40) концентрации кислорода, и/или сигналов дополнительных датчиков газа, температуры, объёмного расхода и/или давления, от датчиков, расположенных в упомянутой по меньшей мере одной замкнутой контролируемой области (11) и/или защищаемой области (10), и/или оценки сигналов от дверных контактов, расположенных в контролируемой и/или защищаемой области (10), и/или
- запроса количества инертного газа от по меньшей мере одного генератора (30a, 30b) инертного газа, и/или
- приведения в действие исполнительных механизмов в упомянутой по меньшей мере одной замкнутой контролируемой области (11) и/или защищаемой области (10), и/или
- приведения в действие дисплеев в упомянутой по меньшей мере одной замкнутой контролируемой и/или защищаемой области (10) или на ней, в частности для отображения значений измерений концентрации кислорода, и/или
- приведения в действие акустических и/или визуальных средств (42) оповещения в случае оповещения;
c) координация связи между компонентами системы снижения концентрации кислорода и/или координация связи с точками за пределами системы снижения концентрации кислорода, в частности посредством
- распределения запросов на количества инертного газа по множеству генераторов (30a, 30b) инертного газа согласно заданным критериям, и/или
- распределения формируемого инертного газа по множеству замкнутых защищаемых областей (10) согласно заданным критериям, и/или
- сбора и оценки по меньшей мере одного сигнала состояния, сбоя и/или оповещения от по меньшей мере одного управляющего модуля (21, 22, 23, 24, 25), и/или
- формирования по меньшей мере одного сообщения состояния, сбоя и/или оповещения, в частности для отображения на панели (43) управления и/или для перенаправления во внешнее, в частности постоянно обитаемое, местоположение (68), и/или
- приведения в действие дисплеев, в частности для отображения значений измерения от датчиков, и/или
- обеспечения удалённого доступа в систему снижения уровня кислорода.
4. Система управления и регулирования по п. 3,
отличающаяся тем, что
контроллер (22) процесса для управления и/или регулирования формирования инертного газа выполнен в виде управляющего модуля (21, 22, 23, 24, 25).
5. Система управления и регулирования по п. 4,
отличающаяся тем, что
предусмотрено множество контролируемых областей (11) и/или защищаемых областей (10), причём
- по меньшей контроллер (23) области назначен каждой защищаемой области (10) для управления и/или регулирования уровня концентрации кислорода в защищаемой области (10), и/или
- по меньшей мере один контроллер (23) области назначен каждой контролируемой области (11) для контроля уровня концентрации кислорода в контролируемой области (11).
6. Система управления и регулирования по одному из пп. 3-5,
отличающаяся тем, что
комбинированный контроллер (24, 25), включающий в себя регулирующие функции по меньшей мере двух управляющих модулей (21, 22, 23, 24, 25) предусмотрен в качестве управляющего модуля (21, 22, 23, 24, 25), который выполнен или, соответственно, конфигурирован или является конфигурируемым как главный контроллер (21), контроллер (23) области или контроллер (22) процесса.
7. Система управления и регулирования по одному из предшествующих пунктов,
отличающаяся тем, что
по меньшей мере два управляющих модуля (21, 22, 23, 24, 25) имеют одинаковый диапазон функций и осуществляют сигнальную связь друг с другом таким образом, чтобы сформировать резервированную группу контроллеров.
8. Система управления и регулирования по одному из предшествующих пунктов,
отличающаяся тем, что
каждый из управляющих модулей (21, 22, 23, 24, 25), в частности управляющих модулей (21, 22, 23, 24, 25) группы контроллеров, конфигурирован и осуществляет сигнальную связь друг с другом таким образом, что управляющий модуль (21, 22, 23, 24, 25) автоматически принимает на себя регулирующую функцию другого управляющего модуля (21, 22, 23, 24, 25), если последний испытывает сбой и/или перегрузку.
9. Система управления и регулирования по одному из предшествующих пунктов,
отличающаяся тем, что
отдельные управляющие модули (21, 22, 23, 24, 25) и/или группы контроллеров размещены с пространственным разделением друг от друга.
10. Система управления и регулирования по одному из предшествующих пунктов,
отличающаяся тем, что
управляющие модули (21, 22, 23, 24, 25) выполнены с возможностью осуществления сигнальной связи с блоком (61) хранения и оценки данных таким образом, чтобы обеспечить возможность долговременного хранения и оценки системных данных, в частности параметров управления, данных датчиков, данных окружения, данных энергопотребления и/или сообщений состояния, сбоя и оповещения.
11. Система управления и регулирования по одному из предшествующих пунктов,
отличающаяся тем, что
каждый управляющий модуль (21, 22, 23, 24, 25) имеет функцию периферийного распознавания таким образом, что может автоматически распознаваться тип и режим работы датчиков (31a, 40) концентрации кислорода и/или исполнительных механизмов (32, 33, 41) и/или датчиков (31b), соединённых с соответствующим управляющим модулем (21, 22, 23, 24, 25).
12. Система управления и регулирования по п. 11,
отличающаяся тем, что
управляющие модули (21, 22, 23, 24, 25) имеют самоконфигурирующуюся структуру таким образом, что регулирующие функции могут автоматически активироваться и/или деактивироваться на основании соответствующего типа и режима работы соединённых датчиков (31a, 40) концентрации кислорода, и/или исполнительных механизмов (32, 33, 41) и/или дополнительных датчиков (31b) или на основании их интерфейсов ввода/вывода.
13. Система управления и регулирования по одному из предшествующих пунктов, в частности по одному из пп. 3-12,
отличающаяся тем, что
упомянутый по меньшей мере один управляющий модуль (21, 22, 23, 24, 25), в частности контроллер (22) процесса и/или главный контроллер (21), конфигурирован таким образом, что инертный газ распределяется в соответствии с заданными критериями таким образом, что множество генераторов (30a, 30b) инертного газа работают в течение одинаковых периодов времени.
14. Система снижения уровня кислорода, в частности противопожарная система, содержащая систему управления и регулирования по одному из предшествующих пунктов.
15. Способ управления и/или регулирования системы снижения уровня кислорода по п. 14, причём один или более управляющих модулей (21, 22, 23, 24, 25) выполнены с возможностью выполнения по меньшей мере одной из следующих регулирующих функций:
- управление и/или регулирование генератора (30a, 30b) инертного газа,
- оценка сигнала концентрации кислорода от датчика (31a, 40) концентрации кислорода, и
- приведение в действие исполнительного механизма (32, 33, 41) для выпуска инертного газа;
причём различные регулирующие функции назначаются отдельным управляющим модулям (21, 22, 23, 24, 25) во время работы, и при этом в случае сбоя одного управляющего модуля (21, 22, 23, 24, 25) другой управляющий модуль (21, 22, 23, 24, 25) автоматически принимает на себя его регулирующие функции.
| US 2018001124 A1, 04.01.2018 | |||
| ВИХРЕВОЙ ПЕНОГЕНЕРАТОР | 2015 |
|
RU2617753C1 |
| US 5058004 A1, 15.10.1991 | |||
| JP H07154391 A, 16.06.1995 | |||
| WO 1995001041 A1, 05.01.1995 | |||
| DE 102009030703 B4, 01.09.2016 | |||
| Устройство для пневматического формования задников резиновой обуви на стельку | 1938 |
|
SU58761A1 |
| Способ повышения видимости слабых изображений | 1957 |
|
SU113855A1 |

