Способ относится к области магнитных измерений и может быть использован для решения научных и практических задач, связанных с целенаправленным магнитным воздействием на магнитоактивные частицы, содержащиеся в природных, техногенных и искусственно создаваемых дисперсных средах. Крайне востребованная здесь информация о магнитных свойствах таких частиц (одиночных, малообъемных), на получение которой направлен способ, по сути, является ключевой для результативной технико-технологической проработки соответствующих процессов, в частности, магнитного разделения (сепарации, магнитофореза) в промышленности и медицине.
Известен способ определения магнитной восприимчивости малообъемных магнетиков, основывающийся на пондеромоторном принципе [1-4] - по данным измерения магнитной (пондеромоторной) силы Fm, действующей на размещенный в неоднородном магнитном поле изучаемый магнетик объемом V. Если в месте расположения такого магнетика измерены и/или вычислены напряженность поля H или его индукция B, а также неоднородность gradH или gradB, то при использовании известных эквивалентных выражений для этой силы, а именно:
Fm = μ0χVHgradH или Fm = χVBgradB/μ0, (1)
определяется магнитная восприимчивость χ малообъемного магнетика, где μ0 = 4π⋅10-7 Гн/м - магнитная константа.
Однако характерный размер δ изучаемого малообъемного магнетика и соответственно его объем V могут быть настолько малы, что измерение действующей на него магнитной силы Fm становится проблематичным (согласно упомянутым выражениям: Fm ~ V, т.е. Fm ~ δ3, а значит, при уменьшении δ магнитная сила Fm убывает стремительно, например, при уменьшении δ в 10 раз эта сила уменьшается в 103 раз). Следовательно, в этих случаях, когда речь идет о весьма малом по размерам и объему магнетике (уровня мелкой частицы), применение рассматриваемого способа здесь вряд ли возможно. К тому же, указанный способ в традиционном исполнении (например, с использованием рекомендуемой в [1-4] той или иной формы магнитных полюсов) недостаточно проработан. Так, отсутствуют необходимые для пользователя сведения о рабочей зоне (где следует размещать изучаемый магнетик). Эта зона должна характеризоваться стабильной, т.е. практически постоянной, неоднородностью поля и хотя требование о необходимом наличии такой зоны в [1-4] декларируется, но применительно к той или иной, рекомендуемой в [1-4] форме магнитных полюсов, аргументированные и конкретные сведения о фактическом ее создании и идентификации, к сожалению, отсутствуют.
Известны технические решения [5-8], в которых реализуется тот же пондеромоторный принцип определения магнитных свойств (магнитной восприимчивости) малообъемных магнетиков, причем используемые для этой цели полюсные наконечники имеют специфичную (вместе с тем, заметим - сравнительно несложную в изготовлении) форму, а именно сферическую. Это позволяет создавать и идентифицировать (что отчетливо видно на соответствующих демонстрационных материалах [5]) рабочую зону для размещения в ней изучаемого магнетика. Эта зона обнаруживается при диагностике значений индукции B (например, датчиком Холла, перемещаемым по линии действия пондеромоторной силы в радиальном направлении плоскости симметрии межполюсного пространства), и тем самым - получении координатной характеристики параметра B. Эта характеристика для варианта применения оговоренных полюсов сферической формы является извилистой (с перегибом), что предопределяет ожидаемый вид координатных характеристик таких параметров, как градиент gradB и магнитный силовой фактор BgradB, а именно экстремальный. Получаемая развернутая информация, свидетельствуя о наличии стабильных (практически постоянных, т.е. требуемых для выбора рабочей зоны) значений этих параметров, а именно в окрестности их экстремумов, служит основанием оператору для необходимого позиционирования изучаемого малообъемного магнетика в выбранной рабочей зоне.
Несмотря на то, что технические решения [5-8] позволяют создавать и идентифицировать столь необходимую рабочую зону (для измерения пондеромоторной силы Fm, действующей на помещаемую в эту зону изучаемого малообъемного магнетика, и последующего определения его магнитной восприимчивости χ), отмеченный выше недостаток, присущий способам и устройствам, работающим на пондеромоторном принципе, остается также и для рассматриваемого (усовершенствованного) способа. Так, применение этого способа вряд ли возможно, если подлежащий изучению малообъемный магнетик - частица малых размеров δ и объема V (настолько, что действующая на нее пондеромоторная сила Fm не поддается традиционному измерению).
Известен способ магнитно-реологической диагностики магнитной восприимчивости частицы χ при ее магнитоуправляемом перемещении в жидкости [9, 10]. При его реализации осуществляется вертикальное перемещение изучаемой частицы (вниз) в столбе жидкости и определяется время τ ограниченного фиксируемого перемещения h частицы - под действием силы тяжести (гравитационной) Fg, силы Архимеда FA, силы Стокса FS, а также магнитной силы Fm. Сила Fm создается неоднородным магнитным полем, которое в месте текущего нахождения частицы характеризуется напряженностью H и индукцией B, градиентом gradH и gradB, магнитным силовым фактором HgradH и BgradB. Применяемые для получения этого поля полюсные наконечники электромагнитной системы, располагаемые по обе стороны столба жидкости, выполнены сферической формы. Благодаря этому в межполюсной области, а именно в пределах ограниченной рабочей зоны (расположенной при реализации этого способа-прототипа выше межцентровой линии полюсных наконечников), где осуществляется фиксируемое перемещение h частицы, обеспечивается требуемая стабильность магнитного силового фактора и тем самым стабильность силы Fm. Искомая же магнитная восприимчивость χ изучаемой частицы определяется исходя из условия баланса указанных сил.
Недостатком способа-прототипа является то, что из-за осуществления вертикального перемещения изучаемой частицы в столбе жидкости вниз - в пределах, обратим внимание, ограниченной рабочей зоны, расположенной выше межцентровой линии полюсных наконечников, в необходимом для определения магнитной восприимчивости χ изучаемой частицы условии баланса сил такие силы как гравитационная Fg и магнитная Fm совпадают по направлению. В связи с этим изучаемая частица в рабочей зоне (напомним: вынужденно ограниченной по размерам) перемещается сравнительно быстро. Поэтому время такого перемещения частицы весьма короткое, его фиксация вызывает трудности, что негативно сказывается на точности измерений и в конечном счете - на точности диагностики данных χ. Применение же специальных, дополнительных средств фиксации времени перемещения изучаемой частицы в рабочей зоне (регистрацией фактов входа частицы в эту зону и выхода из нее) приводит к усложнению и удорожанию оборудования, необходимого для реализации способа.
Задачей предлагаемого изобретения является расширение функциональных возможностей способа (предпочтительно - за счет создания возможности управления скоростью перемещения изучаемой частицы, обусловливая замедленное ее перемещение в пределах вынужденно ограниченной рабочей зоны, а именно зоны со стабилизированной неоднородностью магнитного поля) и тем самым повышение точности измерений времени этого перемещения и диагностики данных магнитной восприимчивости изучаемой частицы, исключая при этом усложнение и удорожание способа.
Ожидаемый технический результат достигается в способе магнитно-реологической диагностики магнитной восприимчивости частицы χ при ее магнитоуправляемом перемещении в жидкости. Он заключается в вертикальном перемещении изучаемой частицы в столбе жидкости и определении времени τ ограниченного фиксируемого перемещения h частицы при действии на нее силы тяжести Fg, силы Архимеда FA, силы Стокса FS, а также магнитной силы Fm, создаваемой неоднородным магнитным полем. В месте текущего нахождения частицы это поле характеризуется напряженностью H и/или индукцией B, градиентом gradH и/или gradB, магнитным силовым фактором HgradH и/или BgradB. Применяемые для получения этого поля полюсные наконечники электромагнитной системы, располагаемые по обе стороны столба жидкости, выполнены сферической формы. Благодаря этому в межполюсной области, а именно в пределах ограниченной по размерам рабочей зоны, где осуществляется фиксируемое перемещение h частицы, обеспечивается требуемая стабильность магнитного силового фактора и тем самым стабильность силы Fm. Магнитная восприимчивость частицы χ определяется исходя из условия баланса указанных сил. При этом, когда применяются полюсные наконечники сферической формы, координатная характеристика магнитного силового фактора в любом из радиальных направлений плоскости симметрии межполюсной области имеет экстремальный вид. Следовательно, зона в окрестности экстремума, где значения магнитного силового фактора практически стабильны, являясь рабочей зоной, содержится по вертикали как выше, так и ниже межцентровой линии полюсных наконечников. Для выполнения магнитно-реологической диагностики целесообразно использовать нижнюю рабочую зону, в которой сила тяжести Fg, направленная вниз, и магнитная сила Fm, направленная вверх, противодействуют друг другу. Тем самым расширяются функциональные возможности способа, прежде всего для управления скоростью перемещения частицы, обусловливая необходимое замедленное (по сравнению со случаем, когда Fg и Fm однонаправленны) перемещение изучаемой частицы вверх (в пределах вынужденно ограниченной величины h), при этом магнитную восприимчивость частицы χ определяют исходя из скорректированного (с учетом того, что Fg и Fm противоположны по направлению) условия баланса сил.
Магнитная восприимчивость χ частицы, совершающей замедленное вертикальное перемещение вверх, определяется исходя из условия баланса действующих на частицу сил, а именно Fg, FA, FS, Fm, по любому из выражений:
в зависимости от того, какой из параметров выбран для характеристики поля, а именно напряженность H или индукция B. Здесь η - динамическая вязкость жидкости, ρ и ρη - плотность частицы и жидкости, g - ускорение свободного падения, δ - эквивалентный диаметр частицы, уподобляемой шарообразной, τ - время фиксированного перемещения h частицы в жидкости вверх (в пределах зоны стабильности магнитного силового фактора), µ0 = 4π·10-7Гн/м - магнитная константа, k = 1/ϕ - вводимый в выражение для силы FS коэффициент, учитывающий отличие формы изучаемой частицы от модельной сферической, где ϕ - отношение скоростей частицы и эквивалентной ей по диаметру частицы шарообразной формы (по данным [11]: ϕ = 0,66…0,77 для разных несферических частиц: угловатых, округлой формы).
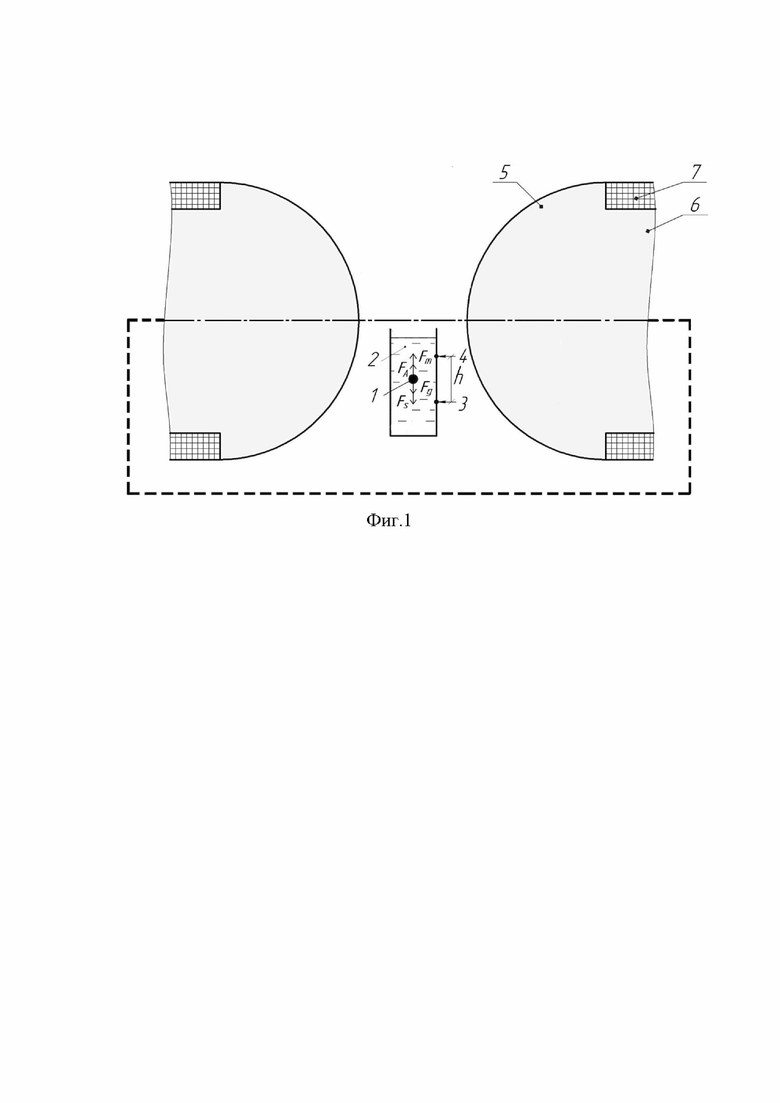
На фиг. 1 иллюстрируется техническое решение по реализации предложенного способа магнитно-реологической диагностики магнитной восприимчивости χ частицы при ее магнитоуправляемом перемещении в жидкости. На изучаемую частицу 1 характерным размером (эквивалентным диаметром) δ и плотностью ρ, находящейся в столбе жидкости 2 с известными значениями плотности ρη и динамической вязкости η действуют четыре силы: гравитационная (сила тяжести) Fg = πδ3ρg/6 (g - ускорение свободного падения), сила Архимеда FA = πδ3ρηg/6, сила Стокса FS = 3πδkηh/τ (τ - время фиксируемого, т.е. совершаемого в пределах зоны стабильности магнитного силового фактора, а именно от метки 3 до метки 4 на фиг. 1, перемещения h частицы в жидкости вверх, k=1/ϕ - коэффициент, учитывающий отличие формы изучаемой частицы от модельной сферической, где ϕ - отношение скоростей частицы и эквивалентной ей по диаметру частицы шарообразной формы), магнитная сила Fm = µ0χVHgradH = χVBgradB/µ0 (µ0 - магнитная константа, V = πδ3/6 - объем изучаемой частицы, уподобляемой сферической, H и/или B - напряженность и/или индукция поля в рабочей зоне, в пределах которой изучаемая частица перемещается вверх на величину h). В пределах перемещения h частицы 1, т.е. от положения метки 3 (нижней) до положения метки 4 (верхней), где силы Fg, FA и FS постоянны, обеспечивается постоянство магнитной силы Fm - благодаря тому, что в этих пределах магнитный силовой фактор HgradH (и/или BgradB) практически стабилен. Это достигается за счет использования (для создания соответствующего неоднородного магнитного поля) электромагнитной системы, в которой полюсные наконечники 5 (магнитопровода 6 с обмоткой 7), располагающиеся по обе стороны столба жидкости 2, имеют сферическую форму. При этом, как иллюстрируется на фиг. 1, силы Fg и Fm здесь противоположны по направлению, что расширяет возможности способа, прежде всего для управления скоростью перемещения частицы, обусловливая необходимое замедленное перемещение изучаемой частицы вверх, повышение точности измерений времени этого перемещения. Измеряя время τ движения частицы 1 (вертикально вверх в пределах ее фиксированного перемещения h: от положения метки 3 до положения метки 4), по любому из выражений (2), полученных исходя из условия баланса указанных сил (с учетом того, что силы Fg и Fm противоположны по направлению), определяется магнитная восприимчивость χ изучаемой частицы.
Изобретательский уровень предложенного способа подтверждается отличительной частью формулы изобретения.
Источники информации
[1]. Чечерников В.И. Магнитные измерения / Учебное пособие. М.: МГУ, 1963. 286 с.
[2]. Казин П.Е., Кульбакин И.В. Методы исследования магнитных свойств материалов / М.: МГУ. 2011. 34 с.
[3]. Деркач В.И. Специальные методы обогащения полезных ископаемых / Учебное пособие. М.: Недра. 1966. 338 с.
[4]. Кармазин В.В., Кармазин В.И. Магнитные и электрические методы обогащения / М.: Недра. 1988. 304 с.
[5]. Сандуляк А.А., Киселев Д.О., Сандуляк А.В., Полисмакова М.Н., Сандуляк Д.А. Магнетометр Фарадея с полюсами сферической формы: 3D-оценка рабочих зон / Приборы. 2017. №10. С. 4-7.
[6]. Патент RU 2680863. Электромагнитное устройство для определения магнитной восприимчивости вещества (Сандуляк А.В., Сандуляк А.А., Киселев Д.О., Полисмакова М.Н., Сандуляк Д.А., Ткаченко Р.Ю., Матвеев В.В., Титов А.А.). 2019.
[7]. Патент RU 2737609. Устройство для создания и диагностики зоны стабильной неоднородности магнитного поля (Сандуляк А.А., Сандуляк А.В., Полисмакова М.Н., Сандуляк Д.А., Киселев Д.О.). 2020.
[8]. Сандуляк А.А., Полисмакова М.Н., Сандуляк Д.А., Сандуляк А.В., Ершова В.А. Диагностика рабочей зоны стабильности градиента в магнетометре контроля восприимчивости частиц (для задач магнитной сепарации) / Стекло и керамика. 2021. №3. С. 19-27.
[9]. Патент RU 2753159. Способ магнитно-реологического контроля магнитной восприимчивости частицы (Сандуляк А.А., Сандуляк А.В., Ершова В.А., Сандуляк Д.А.). 2021.
[10]. Сандуляк А.А., Сандуляк Д.А., Полисмакова М.Н., Сандуляк А.В., Ершова В.А., Киселев Д.О. Создание и реализация метода магнитно-реологического контроля магнитной восприимчивости одиночной частицы / Приборы и системы. Управление, контроль, диагностика. 2023. № 5. С.16-22.
[11]. Касаткин А.Г. Основные процессы и аппараты химической технологии (изд. 9-е, испр.) / М.: Химия. 1973. 750 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ магнитно-реологического контроля магнитной восприимчивости частицы | 2020 |
|
RU2753159C1 |
| Магнитно-реологический способ определения магнитной восприимчивости частицы | 2023 |
|
RU2813499C1 |
| СПОСОБ КОНТРОЛЯ МАГНИТНОЙ ВОСПРИИМЧИВОСТИ ЧАСТИЦЫ ПО КОНЦЕНТРАЦИОННОЙ ЗАВИСИМОСТИ ВОСПРИИМЧИВОСТИ ИХ ДИСПЕРСНЫХ ОБРАЗЦОВ | 2021 |
|
RU2773630C1 |
| Магнитометр для реализации экспресс-метода магнитно-реологической диагностики магнитных свойств частицы | 2022 |
|
RU2796798C1 |
| Способ диагностики исполнительной зоны магнитометров пондеромоторного и магнитно-реологического типов | 2024 |
|
RU2837068C1 |
| ЭЛЕКТРОМАГНИТНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ВОСПРИИМЧИВОСТИ ВЕЩЕСТВА | 2018 |
|
RU2680863C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ И ДИАГНОСТИКИ ЗОНЫ СТАБИЛЬНОЙ НЕОДНОРОДНОСТИ МАГНИТНОГО ПОЛЯ | 2020 |
|
RU2737609C1 |
| Устройство для контактного контроля магнитной силы на полюсных поверхностях | 2020 |
|
RU2759889C1 |
| Электромагнитное устройство для создания неоднородного магнитного поля с зоной его стабильной неоднородности | 2022 |
|
RU2789620C1 |
| Устройство для опытно-цифрового анализа содержания в текучей среде магнитно-восприимчивых частиц | 2020 |
|
RU2752578C1 |
Изобретение относится к области магнитных измерений. Сущность изобретения заключается в том, что в способе магнитно-реологической диагностики магнитной восприимчивости частицы при ее магнитоуправляемом перемещении в жидкости осуществляют управление скоростью перемещения изучаемой частицы, обусловливая замедленное ее перемещение в пределах вынужденно ограниченной рабочей зоны, а именно зоны со стабилизированной неоднородностью магнитного поля. Технический результат – повышение точности измерений времени перемещения частицы, повышение точности диагностики данных магнитной восприимчивости частицы. 1 з.п. ф-лы, 1 ил.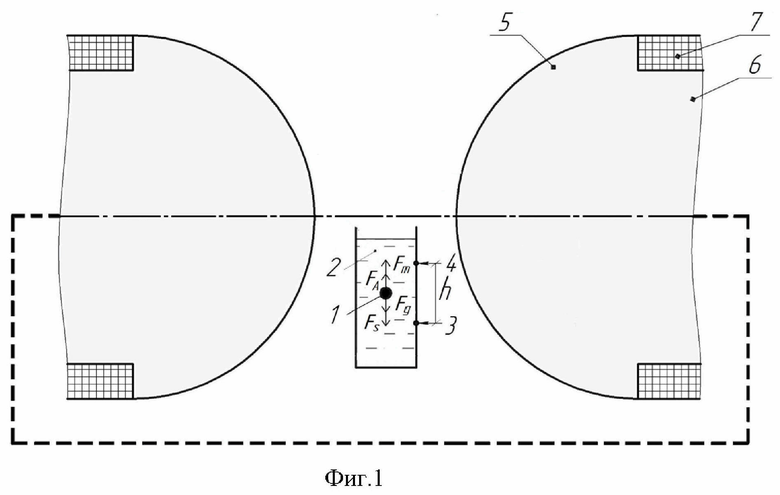
1. Способ магнитно-реологической диагностики магнитной восприимчивости частицы χ при ее магнитоуправляемом перемещении в жидкости, заключающийся в вертикальном перемещении изучаемой частицы в столбе жидкости и определении времени τ ограниченного фиксируемого перемещения h частицы при действии на нее силы тяжести Fg, силы Архимеда FA, силы Стокса FS, а также магнитной силы Fm, создаваемой неоднородным магнитным полем, которое в месте текущего нахождения частицы характеризуется напряженностью H и индукцией B, градиентом gradH и gradB, магнитным силовым фактором HgradH и BgradB, причем применяемые для получения этого поля полюсные наконечники электромагнитной системы, располагаемые по обе стороны столба жидкости, выполнены сферической формы, благодаря чему в межполюсной области, а именно в пределах ограниченной рабочей зоны, где осуществляется фиксируемое перемещение h частицы, обеспечивается требуемая стабильность магнитного силового фактора и тем самым стабильность силы Fm, при этом магнитная восприимчивость частицы χ определяется исходя из условия баланса указанных сил, отличающийся тем, что при применении полюсных наконечников сферической формы, между которыми координатная характеристика магнитного силового фактора в любом из радиальных направлений плоскости симметрии межполюсной области имеет экстремальный вид, следовательно, зона в окрестности экстремума, где значения магнитного силового фактора практически стабильны, являясь рабочей зоной, содержится по вертикали как выше, так и ниже межцентровой линии полюсных наконечников, для выполнения магнитно-реологической диагностики используют нижнюю рабочую зону, в которой сила тяжести Fg, направленная вниз, и магнитная сила Fm, направленная вверх, противодействуют друг другу, расширяя тем самым возможности для управления скоростью перемещения частицы, обусловливая необходимое замедленное перемещение изучаемой частицы вверх в пределах вынужденно ограниченной величины h, при этом магнитную восприимчивость частицы χ определяют исходя из скорректированного с учетом того, что Fg и Fm противоположны по направлению, условия баланса сил.
2. Способ по п. 1, отличающийся тем, что магнитную восприимчивость частицы χ, совершающей замедленное вертикальное перемещение вверх, определяют исходя из условия баланса действующих на частицу сил, а именно Fg, FA, FS, Fm, по любому из выражений:
в зависимости от того, какой из параметров выбран для характеристики поля, а именно напряженность H или индукция B, при этом η – динамическая вязкость жидкости, ρ и ρη – плотность частицы и жидкости, g – ускорение свободного падения, δ – эквивалентный диаметр частицы, уподобляемой шарообразной, τ – время фиксированного перемещения h частицы в жидкости вверх в пределах зоны стабильности магнитного силового фактора, μ0 = 4π·10-7Гн/м – магнитная константа, k = 1/ϕ – вводимый в выражение для силы FS коэффициент, учитывающий отличие формы изучаемой частицы от модельной сферической, где ϕ – отношение скоростей частицы и эквивалентной ей по диаметру частицы шарообразной формы.
| Способ магнитно-реологического контроля магнитной восприимчивости частицы | 2020 |
|
RU2753159C1 |
| Способ контроля степени однородности магнитной суспензии | 1988 |
|
SU1506408A1 |
| Приспособление к швейным машинам для перфоририрования | 1929 |
|
SU19030A1 |
| CN 102141540 A, 03.08.2011. | |||
