Предлагаемый способ относится к измерительной технике и может быть применен для регистрации максимального значения ускорения при соударении движущихся объектов, например, разнообразных транспортных средств, объектов авиационной и также ракетно-космической техники при соударении с жесткой преградой, в частности, при лабораторных и стендовых испытаниях, а также в экстремальных условиях при аварийных ситуациях.
Известен «Способ измерения линейных перемещений» (патент №2515339). Способ заключается в формировании подаваемого на поверхность исследуемого объекта потока светового излучения, регистрации в фиксированной точке отраженного света с последующей регистрацией линейных перемещений.
Известен способ регистрации значения ускорения объекта при падении, согласно, которому датчиком ускорения регистрируют текущее ускорение объекта, а затем по известным аналитическим выражениям вычисляется максимальное значение ускорения объекта, («Методы испытаний изделий и оборудования. Формирование ударных импульсов по заданным спектрам ответа для испытаний оборудования» / Е.А. Канунникова, Н.А. Красова, И.А. Мещихин. // Вопросы электромеханики. Труды НГШ ФГУП «НИИ ВНИИЭМ». - М.: Машиностроение. 2012. - Т. 130.-С.33 - 38).
Недостатком известного способа является низкая точность регистрации, так как известный способ основан на применении в регистрирующей системе механического чувствительного элемента, обладающего определенной массой, следовательно, определенной инерционностью. Указанная особенность инерционных методов регистрации позволяет только с определенной степенью точности регистрировать высокоскоростные процессы, происходящие при высокоскоростных ударных явлениях (см. Батуев Г.С, Голубков Ю.В., Ефремов А.К., Федосов А.А. Инженерные методы исследования ударных процессов. М.: Машиностроение, 1977).
Указанного недостатка лишены оптические способы регистрации высокоскоростных процессов, происходящие при высокоскоростных ударных явлениях.
Известен Способ оптической регистрации изменяющегося во времени быстропротекающих процессов «Способ оптической регистрации» (патент РФ 2321876), согласно которому осуществляют измерение во времени процесса посредством покадровой съемки цифровой видеокамерой с ПЗС-матрицей с получением временной зависимости, по крайней мере, одной кинематической характеристики исследуемого процесса. Указанный способ позволяет осуществить оптическую регистрацию значения текущего перемещения движущегося объекта при соударении с жесткой преградой посредством покадровой съемки цифровой видеокамерой с ПЗС-матрицей с последующим получением временной зависимости изменения ускорения a(t).
Однако, вышеуказанный способ не позволяет осуществить регистрацию значения максимального ускорения при соударении движущегося объекта с жесткой преградой, так как этот относится к технике фоторегистрации однократных, изменяющихся во времени, преимущественно быстропротекающих процессов (горение, детонация, ударные волны и т.п.) на светочувствительный носитель.
Из известных наиболее близким по технической сущности является патент US 2018096485 A1 (CARL ZEISS INDUSTRIELLE MESSTECHNIK GMBH) 05.04.2018 согласно которого приводится способ регистрации значения максимального ускорения действующего на исследуемый блок, расположенный в движущемся объекте при соударении с жесткой преградой, заключающийся в том, что путем оптической регистрации значения текущего перемещения исследуемого оптического блока при соударении объекта с жесткой преградой с последующим получением временной зависимости изменения ускорения, действующего на исследуемый оптический блок, расположенном на объекте. Измерительная система, содержащая систему из нескольких видеокамер и некоторого множества оптических маркерных элементов с целью их идентификации и определения пространственного положения оптического блока с последующей регистрацией значения текущего перемещения объекта.
Однако, этот способ не позволяет осуществить регистрацию точного значения максимального ускорения при соударении движущегося объекта с жесткой преградой и особенно в тех случаях когда скорость соударения движущегося объекта с жесткой преградой составляет величину от 12 м/с до 35 м/с, а в некоторых случаях до 50 м/с и более, так как процесс соударения составляет десятые доли миллисекунд, а регистрация процесса соударения производится дискретно, то даже при весьма малых значениях дискретности имеет место вероятность события, когда момент достижения ускорения своего максимального значения приходится на момент времени между двумя соседними дискретными событиями.
Техническим результатом предлагаемого способа является повышение точности регистрации значения максимального ускорения, действующего на исследуемый блок, при соударении движущегося объекта с жесткой преградой.
Сущность предлагаемого способа по первому варианту заключается в оптической регистрации значения текущего перемещения исследуемого блока, путем фиксирования во времени видеокамерой положения оптического маркерного элемента, расположенного на исследуемом блоке, за счет идентификации отраженного оптического излучения от формирователя потока оптического излучения, с последующим получением с помощью цифрового процессора оценки первой временной зависимости изменения ускорения a(t)1, действующего на исследуемый блок Б1, расположенном на объекте.
Согласно предлагаемому изобретению, по первому варианту, оптическая регистрация значения текущего перемещения исследуемого блока оснащенного оптическим маркерным элементом производится посредством покадровой съемки цифровой видеокамерой с ПЗС-матрицей, одновременно, дополнительно регистрируют во времени ускорение, действующее на расположенный на объекте исследуемый блок Б1 акселерометром, установленным на исследуемом блоке Б1 или на блоке Б2, конструктивно жестко закрепленным за исследуемым блоком Б1, формируют вторую временную зависимость изменения ускорения a(t)2, при этом регистрируют значение максимального ускорения a(t)2max, воздействующего на исследуемый блок.
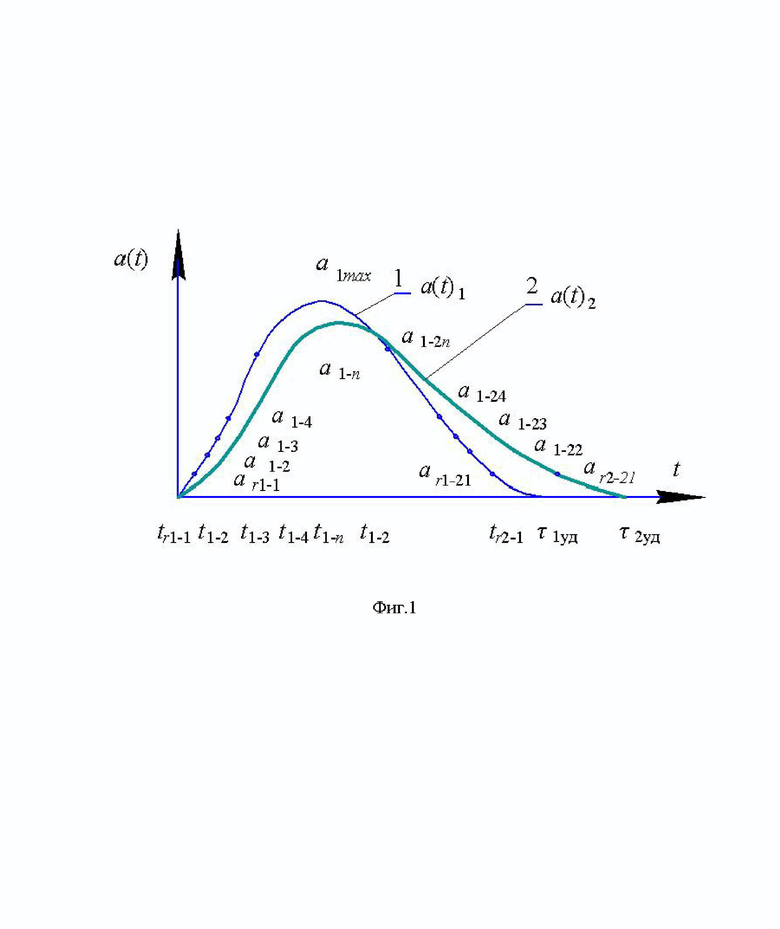
Далее, используя вторую временную зависимость изменения ускорения a(t)2, регистрируют временной интервал между реперными значениями ускорений на восходящей ar1-1 и нисходящей ветви ar1-21,причем, реперные значения ускорений на восходящей и нисходящей ветви графика ускорения ar2-1 и ar2-21 задаются равновеликими с реперными значениями ускорений на восходящей ar1-1 и нисходящей ветви ar1-21 первой временной зависимости изменения ускорения a(t)1.
Затем, в первую очередь, преобразуют вторую временную зависимость изменения ускорения. a(t)2, присваивая временной интервал между реперными значениями ускорения на восходящей ar2-1 и нисходящей ветви ar2-21 первому временному интервалу между реперными значениями ускорений на восходящей ветви ar1-1 и нисходящей ветви ar1-21 первой временной зависимости изменения ускорения a(t)1, причем, реперные значения задаются в пределах от 10 до 15% от зарегистрированного значения максимального ускорения второй временной зависимости изменения ускорения a(t) 2 max.
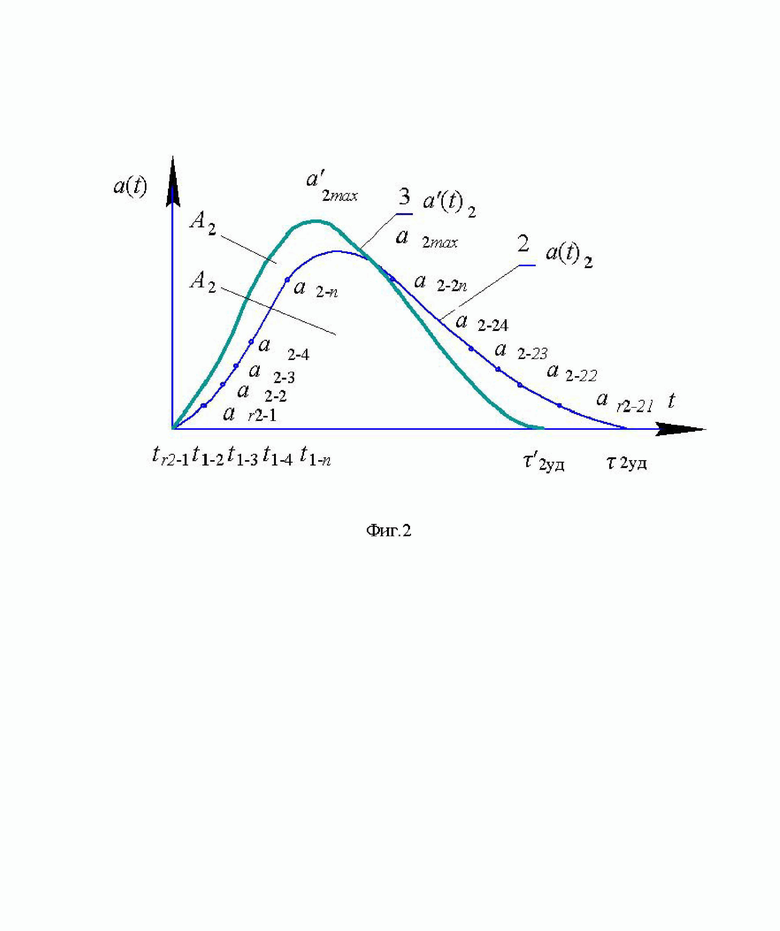
А затем, во вторую очередь, производят аппроксимацию второй временной зависимости изменения ускорения a(t)2, используя граничные условия в виде координат характеристических точек на восходящей ветви и нисходящей ветви графика ускорения a(t)1 и исходя из условия равенства площадей А1 и А2 фигур, ограниченных временными зависимости изменения ускорения, соответственно, первой зависимости a(t)1 и второй зависимости a(t)2, в пределах реперных значений ускорений на восходящих и нисходящих ветвях ar1-1, ar 1-21, ar 2-1, ar 2-21 и соответствующих значениях времени достижения реперных значений ускорений, соответственно, t r1-1, t r1-21, t r2-1, t r2-21: в результате формируют аппроксимированную вторую временную зависимость изменения ускорения a'(t)2 по которой определяют значение максимального ускорения a' 2 max, действующего на исследуемый блок Б1 при соударении объекта с жесткой преградой.
Предлагаемый способ регистрации значения максимального ускорения действующего на исследуемый блок недеформируемом Б1 расположенный в движущемся объекте при соударении с жесткой преградой по первому варианту иллюстрируется чертежами.
На фиг .1 показаны график первой временной зависимости изменения ускорения a(t)1 1, действующего на исследуемый блок Б1 регистрируемый оптическим методом, а также, график второй временной зависимости изменения ускорения a(t)2 2, регистрируемый акселерометром.
На фиг. 2 показан график аппроксимированной второй временной зависимости изменения ускорения a'(t)2 3.
Предлагаемый способ регистрации значения максимального ускорения действующего на исследуемый блок Б1, расположенный в движущемся объекте при соударении с жесткой преградой реализуется с помощью устройства содержащего только исследуемый блок Б1 (фиг. 3) или устройства содержащего исследуемый блок Б1 и блок Б2, конструктивно жестко закрепленным за исследуемым блоком Б1 (фиг. 4).
Устройство, реализующее способ регистрации значения максимального ускорения действующего на исследуемый блок Б1, расположенный в движущемся объекте при соударении с жесткой преградой по первому варианту содержит в общем случае (фиг. 4):
4 - цифровую видеокамеру с ПЗС-матрицей;
5 - формирователь потока оптического излучения; с оптической фокусирующей системой и устройством юстировки;
6 - оптический маркерный элемент;
7 - формирователь стартового импульса;
8 - генератор опорных импульсов;
9 - регистратор временных интервалов;
10 - акселерометр;
11 - цифровой процессор, оснащенный устройствами хранения и обработки информации, индикации и вывода;
12 - цифровой блок управления;
13 - источник питания;
14 - исследуемый блок Б1
15 - движущийся объект;
16 - фрагмент жесткой преграды, имитирующий при физическом моделировании реальную жесткую преграду;
17 - блок Б2 конструктивно жестко закрепленный за исследуемым блоком Б1.
Способ осуществляется следующим образом.
Первоначально, оптический маркерный элемент 6 устанавливают на исследуемый блок Б1 14 или на блоке Б2 17, конструктивно жестко закрепленным за исследуемым блоком Б1 14.
Далее, производят юстировку в статическом режиме, при котором имитируется соударение объекта 15 с фрагментом жесткой преградой 16, цифровой видеокамеры с ПЗС-матрицей 4, относительно оптического маркерного элемента 6 на исследуемый блок Б1 14, таким образом, чтобы в вышеуказанном положении объекта 15 оптическое излучение формирователя потока оптического излучения 5, поступало на начальный регистрирующий элемент ПЗС-матрицы высокоскоростной цифровой видеокамеры 4.
В случае, если на исследуемый блок 14, расположенный на движущемся объекте 15 закрыт конструктивной оболочкой, в первую очередь, производят демонтаж объекта, а затем, производят установку оптического маркерного элемента 6.
Далее, производят установку акселерометра 10 с целью регистрации ускорения, действующего исследуемый блок Б1 14 или на блок Б2 17, конструктивно жестко закрепленным за исследуемым блоком Б1 14.
Акселерометр 10 устанавливается таким образом, чтобы, первую очередь, продольная ось чувствительности акселерометра совпадала с направлением вектора скорости движущегося объекта 15 при соударении с жесткой преградой 16. Во вторых, крепление акселерометра 10 на исследуемый блок Б1 14 или на блок Б2 17, конструктивно жестко закрепленным за исследуемым блоком Б1 14 должно обеспечивать нормируемое усилие поджатия.
После приступают к лабораторным или стендовым испытаниям с целью регистрации значения максимального ускорения, действующего на исследуемый блок Б1 14, расположенный на движущемся объекте 15 при соударении с жесткой преградой 16,
Регистрация значения максимального ускорения заключается в оптической регистрации значения текущего перемещения исследуемого блока 14, путем фиксирования во времени видеокамерой 4 положения оптического маркерного элемента 6, расположенного на исследуемом блоке Б1 за счет идентификации отраженного оптического излучения от формирователя потока оптического излучения 5, с последующим получением с помощью цифрового процессора 11 оценки первой временной зависимости изменения ускорения a(t)1 1, действующего на исследуемый блок Б1 14, расположенном на объекте 15.
Процесс формирования с помощью цифрового процессора 11 и известных алгоритмов оценки первой временной зависимости изменения ускорения a(t)1 1 происходит следующим образом. В момент соударении объекта 15 с жесткой преградой 16 поток оптического излучения, отраженный от оптического маркерного элемента 6 воздействует на начальный регистрирующий элемент ПЗС-матрицы 4, при этом, формирователь стартового импульса 7, запускает генератор опорных импульсов 8, а цифровой процессор 11 приводится в активный режим.
Далее, приступают к последующему формированию с помощью цифрового процессора 11 и известных алгоритмов оценки первой временной зависимости изменения ускорения a(t)1 1 в пределах от 0 до t1 уд - времени окончания регистрируемого процесса соударения, действующего на исследуемый блок Б1 14, а именно в пределах длительность ударного взаимодействия с жесткой преградой - τ1 уд.
В результате выше указанных процедур, используя цифровой процессор 11 и регистратор временных интервалов 9, формируется зависимость изменения ускорения a(t)1 1, действующего на исследуемый блок Б1 14 расположенном в объекте 15 при соударении движущегося объекта с жесткой преградой 16.
Одновременно цифровой процессор 11, оснащенный отдельными элементами хранения и обработки информации, индикации и вывода, обеспечивает оперативное визуальное прослеживание процессов, происходящих при регистрации текущего ускорения, действующего на исследуемый блок Б1 14, а также формирование пакетов с цифровой информации, передаваемых по соответствующим интерфейсам на.
При этом цифровой блок управления 12 обеспечивает необходимые оперативное управление процессами, сопутствующими регистрации текущего ускорение действующего на исследуемый блок 14, а также формирование стартовых команд.
В тоже время источник питания 13 обеспечивает подачу необходимого напряжения на все энергопотребляющие элементы устройства.
Одновременно с процессом формирования с помощью цифрового процессора 11 и известных алгоритмов оценки первой временной зависимости изменения ускорения a(t)1 1, дополнительно регистрируют во времени ускорение, действующее на расположенный на объекте исследуемый блок Б1 14 акселерометром 10, установленным на исследуемом блоке Б1 14 или на блоке Б2 17, конструктивно жестко закрепленным за исследуемым блоком Б1 14, и формируют вторую временную зависимость изменения ускорения a(t)2 2.
При этом регистрируют значение максимального ускорения второй временной зависимости изменения ускорения a(t) 2 max, воздействующего на исследуемый блок Б1 14.
Затем, используя вторую временную зависимость изменения ускорения a(t)2, регистрируют временной интервал между реперными значениями ускорений на восходящей ar1-1 и нисходящей ветви ar1-21, причем, реперные значения ускорений на восходящей и нисходящей ветви графика ускорения ar2-1 и ar2-21 задаются равновеликими с реперными значениями ускорений на восходящей ar1-1 и нисходящей ветви ar1-21 первой временной зависимости изменения ускорения a(t)1.
Далее, в первую очередь, преобразуют вторую временную зависимость изменения ускорения a(t)2 2, присваивая временной интервал между реперными значениями ускорения на восходящей ar2-1 и нисходящей ветви ar2-21 первому временному интервалу между реперными значениями ускорений на восходящей ветви ar1-1 и нисходящей ветви ar1-21 первой временной зависимости изменения ускорения a(t)1 1, причем, реперные значения задаются в пределах от 10 до 15% от зарегистрированного значения максимального ускорения второй временной зависимости изменения ускорения a(t) 2 max.
А затем, во вторую очередь, производят аппроксимацию второй временной зависимости изменения ускорения a(t)2, используя граничные условия в виде координат характеристических точек на восходящей ветви и нисходящей ветви графика ускорения a(t)1 1 и исходя из условия равенства площадей А1 и А2 фигур, ограниченных временными зависимости изменения ускорения, соответственно, первой зависимости a(t)1 1 и второй зависимости a(t)2 2, в пределах реперных значений ускорений на восходящих и нисходящих ветвях ar1-1, ar 1-21, ar 2-1, ar 2-21 и соответствующих значениях времени достижения реперных значений ускорений, соответственно, t r1-1, t r1-21, t r2-1, t r2-21: в результате формируют аппроксимированную вторую временную зависимость изменения ускорения a'(t)2 3, по которой определяют значение максимального ускорения a' 2 max, действующего на исследуемый блок Б1 14 при соударении объекта с жесткой преградой.
Сущность заявляемого способа по второму варианту заключается в том, что блоки Б1 и Б2 выполнены не деформируемыми и площади фигур, ограниченных первой зависимости a(t)1 и второй зависимости a(t)2 временными зависимости изменения ускорения, определяют, соответственно, как
 .
.
Сущность заявляемого способа по третьему варианту заключается в том, что в случае если вторую временную зависимость изменения ускорения a(t)2, регистрируют акселерометром, установленным на не деформируемом блоке Б2, конструктивно жестко закрепленным за исследуемым недеформируемом блоком Б1, расстояние L между центром посадочной поверхности акселерометра и центром оптического маркерного элемента на блоке ~БХ выбирается исходя из условия
L=(0,6…0,85) ⋅ 1/4 ⋅ λвол,
где 1/4 ⋅ λвол - 1/4 длины звуковой волны в материале объекта;
λвол=с звука / ƒпред,
где ƒпред - предельное значение рабочей частоты акселерометра;
с звука - значение скорости звука в материале блока Б1.
Сущность заявляемого способа по четвертому варианту заключается в том, что блоки Б1 и Б2 выполнены деформируемыми и регистрация значения максимального ускорения действующего на исследуемый деформируемый блока Б1 в конкретном сечении, производится путем размещения оптического маркерного элемента таким образом, чтобы центр оптического маркерного элемента совпадал с указанным конкретным сечением.
При этом дополнительно фиксируют смещение по времени Δа2 второй смещенной временной зависимости ускорения a(t)2, регистрируемого акселерометром относительно первой временной зависимости a(t)1, обусловленное упругой деформацией исследуемого деформируемого блока Б1, а также в случае использования вспомогательного деформируемого блока Б2, и его упругой деформацией, причем расстояние L между центром посадочной поверхности акселерометра и центром оптического маркерного элемента на блоке Б1 выбирается исходя из условия
(0,6…0,85) ⋅ 1/4 λвол>L>(0,6…0,95) ⋅ νсоуд max ⋅ Δτуд,
где 1/4 ⋅ λвол - 1/4 длины звуковой волны в материале объекта;
λвол=с звука / ƒпред,
где ƒпред - предельное значение рабочей частоты акселерометра;
с звука - значение скорости звука в материале блока Б1;
νсоуд max - значение максимальной скорости соударении объекта с жесткой преградой;
Δτуд - дискретность регистрации первой временной зависимости изменения ускорения a(t)1.
Значение площади А1 определяется как
 ,
,
а значение площади А2 определяется исходя из смещения по времени Δа2 второй смещенной временной зависимости a(t)2 относительно первой зависимости a(t)1, обусловленного упругой деформацией деформируемого исследуемого блока Б1, а также, в случае использования вспомогательного деформируемого блока Б1 и его упругой деформацией, при этом скорректированное значение площади фигуры А2 ограниченной второй смещенной временной зависимостью a(t)2 в пределах реперных значений ускорений на восходящих и нисходящих ветвях а r2-1, ar2-21, вычисляется по формуле

где t2-0 - время, соответствующее смещению второй смещенной временной зависимости a(t) 2 относительно первой зависимости a(t)1;
τ2 уд и t2 уд - соответственно, длительность второй смещенной временной зависимости a(t)2 и соответствующее время окончания регистрируемого процесса соударения, в результате аппроксимации второй смещенной временной зависимости a(t)2 формируют вторую аппроксимированную временную зависимость изменения ускорения a'(t)2, а затем определяют значение максимального ускорения a'2 max действующего на исследуемый блок Б1 в конкретном сечении при соударении объекта с жесткой преградой.
Предлагаемый способ регистрации значения максимального ускорения действующего на исследуемый деформируемом блок Б1 в конкретном сечение, расположенный в движущемся объекте при соударении с жесткой преградой по четвертому варианту иллюстрируется чертежами.
На фиг. 5 показаны график первой временной зависимости изменения ускорения a(t)1 1, действующего на исследуемый деформируемый блок Б1 14 регистрируемый оптическим методом и график второй смещенной временной зависимости изменения ускорения a(t)2 2, регистрируемый акселерометром и график второй аппроксимированной временной зависимости изменения ускорения a'(t)2 18.
На фиг.6 показано устройство, реализующее способ регистрации значения максимального ускорения действующего на исследуемый блок Б1 14, расположенный в движущемся объекте при соударении с жесткой преградой по четвертому варианту
Устройство выполнено аналогично устройству по п. 1,
В тоже время в цифровом процессоре 19, дополнительно, организована функция регистрации смещения по времени Δа2 второй смещенной временной зависимости ускорения a(t)2 2 регистрируемого акселерометром относительно первой временной зависимости a(t)1 1.
При этом, оптический маркерный элемент 6, устанавливают таким образом, чтобы центр оптического маркерного элемента 6 совпадал с конкретным сечением "а" на исследуемом блоке Б1 14, расположенный в движущемся объекте15.
Причем расстояние L между центром посадочной поверхности акселерометра и центром оптического маркерного элемента на блоке Б1 выбирается исходя из условия
(0,6…0,85) ⋅ 1/4 λвол>L>(0,6…0,95) ⋅ νсоуд max ⋅ Δτуд,
где 1/4 ⋅ λвол - 1/4 длины звуковой волны в материале объекта;
λвол=с звука / ƒпред,
где ƒпред - предельное значение рабочей частоты акселерометра;
с звука - значение скорости звука в материале блока Б1;
νсоуд max - значение максимальной скорости соударении объекта с жесткой преградой;
Δτуд - дискретность регистрации первой временной зависимости изменения ускорения a(t)1.
Способ осуществляется аналогично по п. 1,.
При этом, первоначально, на исследуемый деформируемый блок Б1 14 устанавливают оптический маркерный элемент 6, таким образом, чтобы центр оптического маркерного элемента 6 совпадал с конкретным сечением "а".
Причем расстояние L между центром посадочной поверхности акселерометра и центром оптического маркерного элемента на блоке Ei выбирается исходя из условия
(0,6…0,85) ⋅ 1/4 λвол>L>(0,6…0,95) ⋅ νсоуд max ⋅ Δτуд .
Регистрация первой временной зависимости изменения ускорения a(t)1 1 и второй временной зависимости изменения ускорения a(t)2 2 производится аналогично по п. 1.
При этом дополнительно фиксируют смещение по времени Δа2 второй смещенной временной зависимости ускорения a(t)2 2, регистрируемого акселерометром 10 относительно первой временной зависимости a(t)1 1, обусловленное упругой деформацией исследуемого деформируемого блока Б1 14, а также в случае использования вспомогательного деформируемого блока Б2 17, и его упругой деформацией.
Далее производят аппроксимацию второй временной зависимости изменения ускорения a(t)2 2 аналогично по п. 1.
При этом, значение площади А у определяется как
 ,
,
а значение площади А2 определяется исходя из смещения по времени Δа2 второй смещенной временной зависимости a(t)2 2 относительно первой зависимости a(t)1 1, обусловленного упругой деформацией деформируемого исследуемого блока Б1 14, а также, в случае использования вспомогательного деформируемого блока Б2 17, и его упругой деформацией, при этом скорректированное значение площади фигуры А2, ограниченной второй смещенной временной зависимостью a(t)2 2 в пределах реперных значений ускорений на восходящих и нисходящих ветвях а r2-1, ar2-21, вычисляется по формуле
 .
.
В результате аппроксимации второй смещенной временной зависимости a(t)2 2 формируют вторую аппроксимированную временную зависимость изменения ускорения a'(t)2 18, а затем определяют значение максимального ускорения a'2 max действующего на исследуемый блок Б1 14 в конкретном сечении "а" при соударении объекта 15 с жесткой преградой.
Сущность заявляемого способа по пятому варианту заключается в том, что оптическую регистрацию значения текущего перемещения исследуемого блока при соударении объекта с жесткой преградой производят посредством покадровой съемки цифровой видеокамерой с CMOS-матрицей.
Как показали результаты физического и математического моделирования лабораторного макета устройство, реализующее способ регистрации значения максимального ускорения действующего на исследуемый блок Б1 расположенный в движущемся объекте, при соударении с жесткой преградой, в процессе имитации соударения транспортного средства с жесткой преградой значения ускорения amax опт регистрируемые оптическим способом посредством цифровой видеокамеры отличаются от значений максимального ускорения amax акс регистрируемые акселерометром.
Однако, отличия регистрируемых значений максимального ускорения не существенные и соизмеримы с относительными погрешностями свойственными при регистрации подобных параметров, но имеют системный характер, которые заключаются в следующем.
Во-первых, математическое ожидание максимального ускорения amax акс регистрируемые акселерометром как правило меньше математическое ожидание максимального ускорения amax опт регистрируемые оптическим способом в среднем на 8%, при максимальном значении ускорения amax от 20 до 120 м/с, при это среднее квадратическое отклонение в первом случае, соответственно, от 1,8 м/с2 до 8 м/с2, в то время как, во втором случае, соответственно, от 2,2 м/с2 до 9,5 м/с2.
Во-вторых, на основании результатов физического и математического моделирования можно полагать, что значения параметров, характеризующих соударение, например, транспортного средства с жесткой преградой, регистрируемые акселерометром более стабильны, в отличии от значений регистрируемых оптическим способом, в следствии влияния на результаты регистрации величины дискретности текущего перемещения. Однако, значения параметров соударения движущегося объектов с жесткой преградой, регистрируемые оптическим способом обладают более высокой достоверностью, так акселерометры используют механические чувствительные элементы, которые обладают определенной массой, следовательно, определенной инерционностью.
Результаты физического и математического моделирования также, показывают, что достаточная дискретность регистрации текущего перемещения, обеспечивающая необходимую достоверностью регистрации текущего перемещения при соударении с жесткой преградой достигается, если количество характеристических точек на восходящей ветви и нисходящей ветви графика ускорения не менее 5, но не более 12.
Одновременно следует отметить, что для оптической регистрации текущего перемещения исследуемого блока, расположенного в движущемся объекте при соударении с жесткой преградой оптическими методами, наиболее несообразным является применение видеокамеры основанной на использовании цифровых высокоскоростных видео камер с CMOS-матрицами.
В процессе физического моделирования лабораторного макета использовалась цифровая высокоскоростная камера Evercam 4000-256-С с дискретностью регистрации времени перемещения от 0,05 мс до 0,2 мс. Одновременно, ускорения регистрировалось акселерометром AS 100-15.
На основании выше изложенного можно полагать что, предлагаемый способ повышает точность регистрации значения максимального ускорения действующего на исследуемый блок, расположенный в движущемся объекте при соударении с жесткой преградой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИССЛЕДОВАНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ ПОСРЕДСТВОМ ГИРОСКОПИЧЕСКОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2004 |
|
RU2274831C1 |
| УСТРОЙСТВО ПРОВОДНОЙ ЭЛЕКТРИЧЕСКОЙ СВЯЗИ ДЛЯ МЕТАЕМОГО ТЕЛА И СПОСОБ ИСПЫТАНИЙ МЕТАЕМЫХ ТЕЛ С НЕПРЕРЫВНОЙ РЕГИСТРАЦИЕЙ БАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ | 2005 |
|
RU2287756C1 |
| ЗАТВОР ГИДРОПНЕВМАТИЧЕСКИЙ | 2009 |
|
RU2394971C9 |
| УСТРОЙСТВО КОНТАКТНОЙ СВЯЗИ, УСТАНОВКА И СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ С НЕПРЕРЫВНОЙ РЕГИСТРАЦИЕЙ ПАРАМЕТРОВ КОНЕЧНОЙ БАЛЛИСТИКИ МЕТАЕМЫХ ТЕЛ | 2005 |
|
RU2297619C1 |
| Способ контроля качества многослойных композитных броневых преград из ткани и устройство для его осуществления | 2017 |
|
RU2663414C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1990 |
|
SU1701046A3 |
| Устройство для градуировки акселерометров | 1983 |
|
SU1137399A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2019 |
|
RU2725854C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОНИКАНИЯ МЕТАЕМОГО ТЕЛА В ПРЕГРАДУ | 2004 |
|
RU2263297C1 |
| БПЛА вертикального взлета и посадки | 2020 |
|
RU2747006C1 |
Изобретение относится к области измерительной техники и касается способа регистрации значения максимального ускорения, действующего на исследуемый блок. Способ включает регистрацию перемещения исследуемого блока путем фиксирования видеокамерой положения оптического маркерного элемента, расположенного на исследуемом блоке, и получение первой временной зависимости изменения ускорения а(t)1, действующего на исследуемый блок. Одновременно регистрируют ускорение, действующее на исследуемый блок, акселерометром, установленным на исследуемом блоке или на блоке, жестко закрепленном за исследуемым блоком, и формируют вторую временную зависимость изменения ускорения a(t)2. Кроме того, регистрируют максимальное ускорение a(t)2max, воздействующее на исследуемый блок. Далее преобразуют временную зависимость изменения ускорения а(t)2, используя граничные условия в виде координат характеристических точек на восходящей ветви и нисходящей ветви графика ускорения a(t)1. В результате формируют аппроксимированную вторую временную зависимость изменения ускорения a'(t)2, позволяющую произвести регистрацию значения максимального ускорения a'2max. Технический результат заключается в повышении точности регистрации значения максимального ускорения. 4 з.п. ф-лы, 6 ил.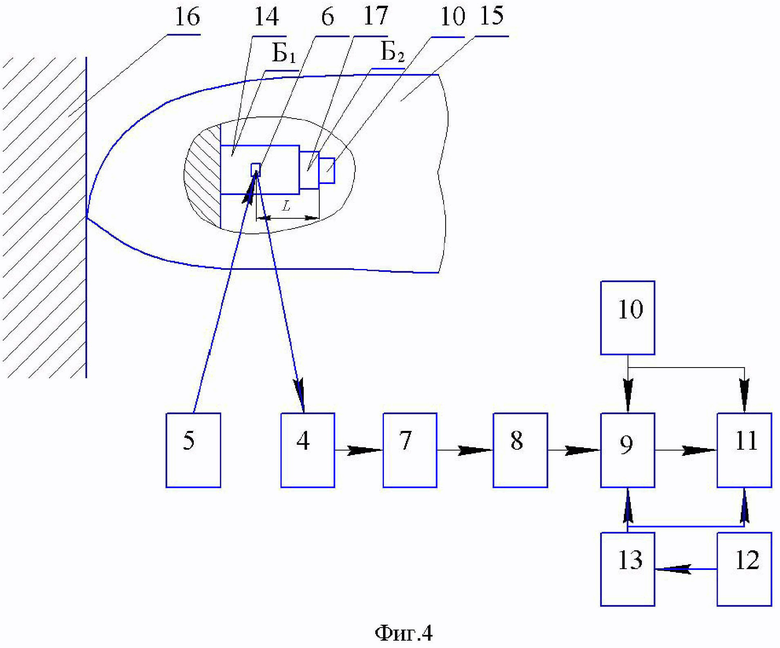
1. Способ регистрации значения максимального ускорения, действующего на исследуемый блок, расположенный в движущемся объекте, при соударении с жесткой преградой, заключающийся в оптической регистрации значения текущего перемещения исследуемого блока, путем фиксирования во времени видеокамерой положения оптического маркерного элемента, расположенного на исследуемом блоке, за счет идентификации отраженного оптического излучения от формирователя потока оптического излучения, с последующим получением с помощью цифрового процессора оценки первой временной зависимости изменения ускорения a(t)1, действующего на исследуемый блок Б1, расположенный на объекте, отличающийся тем, что оптическая регистрация значения текущего перемещения исследуемого блока Б1, оснащенного оптическим маркерным элементом, производится посредством покадровой съемки цифровой видеокамерой с ПЗС-матрицей, одновременно дополнительно регистрируют во времени ускорение, действующее на расположенный на объекте исследуемый блок Б1, акселерометром, установленным на исследуемом блоке Б1 или на блоке Б2, конструктивно жестко закрепленным за исследуемым блоком Б1, формируют вторую временную зависимость изменения ускорения a(t)2 и при этом регистрируют значение максимального ускорения второй временной зависимости изменения ускорения a(t) 2 max, воздействующего на исследуемый блок, используя вторую временную зависимость изменения ускорения a(t)2, регистрируют временной интервал между реперными значениями ускорений на восходящей ar1-1 и нисходящей ветви ar1-21, причем реперные значения ускорений на восходящей и нисходящей ветви графика ускорения ar2-1 и ar2-21 задаются равновеликими с реперными значениями ускорений на восходящей ar1-1 и нисходящей ветви ar1-21 первой временной зависимости изменения ускорения a(t)1, и преобразуют вторую временную зависимость изменения ускорения a(t)2, присваивая временной интервал между реперными значениями ускорения на восходящей ar2-1 и нисходящей ветви ar2-21 первому временному интервалу между реперными значениями ускорений на восходящей ветви ar1-1 и нисходящей ветви ar1-21 первой временной зависимости изменения ускорения a(t)1, причем реперные значения задаются в пределах от 10 до 15% от зарегистрированного значения максимального ускорения второй временной зависимости изменения ускорения a(t) 2 max, и производят аппроксимацию второй временной зависимости изменения ускорения a(t)2, используя граничные условия в виде координат характеристических точек на восходящей ветви и нисходящей ветви графика ускорения a(t)1a, и исходя из условия равенства площадей А1 и А2 фигур, ограниченных временными зависимости изменения ускорения, соответственно, первой зависимости a(t)1 и второй зависимости a(t)2, в пределах реперных значений ускорений на восходящих и нисходящих ветвях ar1-1, ar1-21, ar2-1, ar2-21 и соответствующих значениях времени достижения реперных значений ускорений, соответственно, tr1-1, tr1-21, tr2-1, tr2-21: в результате формируют аппроксимированную вторую временную зависимость изменения ускорения a'(t)2, по которой определяют значение максимального ускорения а'2max, действующего на исследуемый блок Б1 при соударении объекта с жесткой преградой.
2. Способ по п. 1, отличающийся тем, что блоки Б1 и Б1 выполнены недеформируемыми и площади фигур, ограниченных первой зависимостью a(t)1 и второй зависимостью a(t)2 - временными зависимостями изменения ускорения, определяют, соответственно, как

3. Способ по п. 2, отличающийся тем, что в случае, если вторую временную зависимость изменения ускорения a(t)2 регистрируют акселерометром, установленным на недеформируемом блоке Б2, конструктивно жестко закрепленным за исследуемым недеформируемом блоком Б1, расстояние L между центром посадочной поверхности акселерометра и центром оптического маркерного элемента на блоке Б1 выбирается исходя из условия
L=(0,6…0,85) ⋅ 1/4 ⋅ λвол,
где 1/4 ⋅ λвол - 1/4 длины звуковой волны в материале объекта;
λвол=сзвука / ƒпред,
где ƒпред - предельное значение рабочей частоты акселерометра;
сзвука - значение скорости звука в материале блока Б1.
4. Способ по п. 1, отличающийся тем, что блоки Б1 и Б2 выполнены деформируемыми и регистрация значения максимального ускорения, действующего на исследуемый деформируемый блок Б1 в конкретном сечении, производится путем размещения оптического маркерного элемента таким образом, чтобы центр оптического маркерного элемента совпадал с указанным конкретным сечением, при этом дополнительно фиксируют смещение по времени Δа2 второй смещенной временной зависимости ускорения a(t)2, регистрируемого акселерометром относительно первой временной зависимости a(t)1, обусловленное упругой деформацией исследуемого деформируемого блока Б1, а также в случае использования вспомогательного деформируемого блока Б2 и его упругой деформаци, причем расстояние L между центром посадочной поверхности акселерометра и центром оптического маркерного элемента на блоке Б1 выбирается исходя из условия
(0,6…0,85) ⋅ 1/4 ⋅ λвол>L>(0,6…0,95) ⋅ νсоуд max ⋅ Δτуд,
где 1/4 ⋅ λвол - 1/4 длины звуковой волны в материале объекта;
λвол=сзвука / ƒпред,
где ƒпред - предельное значение рабочей частоты акселерометра;
сзвука - значение скорости звука в материале блока Б1;
νсоуд max - значение максимальной скорости соударении объекта с жесткой преградой;
Δτуд - дискретность регистрации первой временной зависимости изменения ускорения a(t)1, значение площади А1 определяется как
 ,
,
а значение площади А2 определяется исходя из смещения по времени Δа2 второй смещенной временной зависимости a(t)2 относительно первой зависимости a(t)1, обусловленного упругой деформацией деформируемого исследуемого блока Б1, а также в случае использования вспомогательного деформируемого блока Б2 и его упругой деформацией, при этом скорректированное значение площади фигуры А2, ограниченной второй смещенной временной зависимостью a(t)2 в пределах реперных значений ускорений на восходящих и нисходящих ветвях ar2-1, ar2-21, вычисляется по формуле

где t2-0 - время, соответствующее смещению второй смещенной временной зависимости a(t)2 относительно первой зависимости a(t)1;
τ2уд и t2уд - соответственно, длительность второй смещенной временной зависимости a(t)2 и соответствующее время окончания регистрируемого процесса соударения, в результате аппроксимации второй смещенной временной зависимости a(t)2 формируют вторую аппроксимированную временную зависимость изменения ускорения a'(t)2, а затем определяют значение максимального ускорения a'2max, действующего на исследуемый блок Б1 в конкретном сечении при соударении объекта с жесткой преградой.
5. Способ по пп. 1-4, отличающийся тем, что оптическую регистрацию значения текущего перемещения исследуемого блока при соударении объекта с жесткой преградой производят посредством покадровой съемки цифровой видеокамерой с CMOS-матрицей.
| US 2018096485 A1, 05.04.2018 | |||
| US 2019381963 A1, 19.12.2019 | |||
| WO 2020132212 A2, 25.06.2020 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УДАРНЫХ НАГРУЗОК С ЛИНЕЙНЫМ ИНДИКАТОРОМ (ОНЛИ) | 2005 |
|
RU2300772C2 |

