Область техники
Изобретение относится к бытовой технике, в частности, к устройствам для вакуумной очистки запыленных поверхностей, а именно к бытовым вертикальным пылесосам с функцией Wi-Fi, включающей удаленное управление его настройками и контроль состояния его составных элементов. Заявленное устройство бытового вертикального пылесоса с функцией Wi-Fi может быть использовано в легкой промышленности при производстве таких устройств.
Уровень техники
Вертикальный пылесос - это тип бытового пылесоса, который имеет вертикальную форму и стоит на полу на своей базе. Он также известен как пылесос-handstick (с англ. «рукоятка»). Вертикальные пылесосы имеют вертикальную форму и состоят из двух основных частей: вертикальной базы и рукояти с мотором и всасывающим устройством. Эти пылесосы могут стоять на полу без поддержки, что делает их удобными для использования и хранения. Эти пылесосы часто обладают достаточно мощным всасывающим мотором, что делает их эффективными при уборке ковров и жестких полов. Также наличие большого пылесборника или контейнера для пыли позволяет увеличить время работы между очистками.
Вертикальные пылесосы обычно оснащены ручкой-рукояткой, которая позволяет легко маневрировать ими по полу и управлять направлением всасывания. Кроме этого пылесосы часто поставляются с различными насадками и аксессуарами для уборки разных поверхностей и доступа к углам и щелям.
Еще одним удобной характеристикой вертикального пылесоса является использование аккумулятора, обычно литий-ионного, что увеличивает мобильность устройства. Также многие вертикальные пылесосы оснащены системами фильтрации для улавливания мельчайших частиц пыли и аллергены.
Вертикальные пылесосы часто выбираются для уборки больших площадей, таких как гостиные, спальни и коридоры, благодаря их высокой мощности и удобству использования. Они популярны среди семей и владельцев домов.
Все рабочие органы такого пылесоса объединены в единой вертикальной конструкции. Двигатель, пылесборный контейнер, фильтры, аккумулятор - все это находится прямо на рукоятке, которая одновременно играет роль всасывающей трубы. Поскольку техника не привязана к розетке, можно убирать в помещениях, где нет доступа к электрической сети. Питание от аккумулятора добавляет удобство в эксплуатации: провод не путается под ногами и не мешает. Радиус действия не ограничен длиной шнура питания, что является дополнительным положительным эффектом беспроводной уборки. Прибор обычно предназначен для сухой уборки поверхностей, таких как кафель, паркет, линолеум, а также ковров с коротким ворсом и обивки мебели путем всасывания сухой пыли и мелкого сухого мусора.
Использование аккумуляторного пылесоса довольно простое и основано на реализации следующих шагов:
1. Зарядить аккумулятор в течение нескольких часов до полной емкости.
2. Подготовить место уборки, то есть произвести очистку от крупных предметов мусора, которые могут повредить пылесос или заблокировать его работу.
3. Включить пылесос посредством нажатия на кнопку питания.
4. Провести уборку, пройдясь по поверхности и убирая пыль и грязь. Для мелких предметов и пыли обычно подходит обычный режим работы.
5. Очистить контейнер по мере его заполнения. Для этого необходимо выключить пылесос, вынуть контейнер, удалить весь собранный мусор.
6. Если аккумулятор съемный, можно продлить срок его службы, заряжая его после использования. При этом не следует допускать полного разряда аккумулятора перед зарядкой.
7. Хранить пылесос и его аксессуары в чистом и сухом месте.
Наиболее близким аналогом заявленного решения является вертикальный аккумуляторный бытовой пылесос, охарактеризованный в патентном документе CN 110058534 А, опубликованном 26.07.2019. Известный пылесос содержит основной корпус, всасывающую трубку, электрическую щетку для пола, генератор воздушного потока, контроллер, циклонный фильтр, блок питания, Wi-Fi-модуль и ручку.
Известная конструкция вертикального пылесоса-прототипа имеет существенный недостаток, который заключается в низкой стабильности беспроводной Wi-Fi-коммуникации за счет того, что преобразующий модуль пылесоса не способен анализировать помехи, которые влияют на работу беспроводных сетей Wi-Fi. В результате известная конструкция обусловлена прерывистой или нестабильной работой беспроводного подключения пылесоса к сети Wi-Fi. Это делает дистанционное управление затруднительным, а порой, в связи с отсутствием Wi-Fi-связи, невозможным.
Таким образом, задачей настоящего изобретения является создание устройства вертикального пылесоса с возможностью удаленного управления из приложения при помощи Wi-Fi сети и функцией автоматической фильтрации полученного информационного Wi-Fi-сигнала от помех, создаваемых устройствами, окружающими пылесос в момент использования, для повышения стабильности Wi-Fi-соединения и бесперебойной работы удаленного управления его работой.
Техническим результатом заявленного изобретения является повышении стабильности подключения вертикального пылесоса к беспроводной сети Wi-Fi для дистанционного управления режимами его работы и мониторинга состояния его блоков при сохранении высокой эффективности работы устройства пылесоса в целом и работы системы приемо-передачи Wi-Fi-сигналов, встроенной в вертикальный пылесос, в частности.
Раскрытие изобретения
Поставленная цель, требуемый и получаемый при использовании изобретения технический результат достигаются нижеследующим.(фраза обрывается?)
Краткое описание чертежей
Сущность изобретения поясняется чертежами, на которых использованы следующие обозначения:
1 - модуль управления с контроллером;
2 - блок управления двигателем;
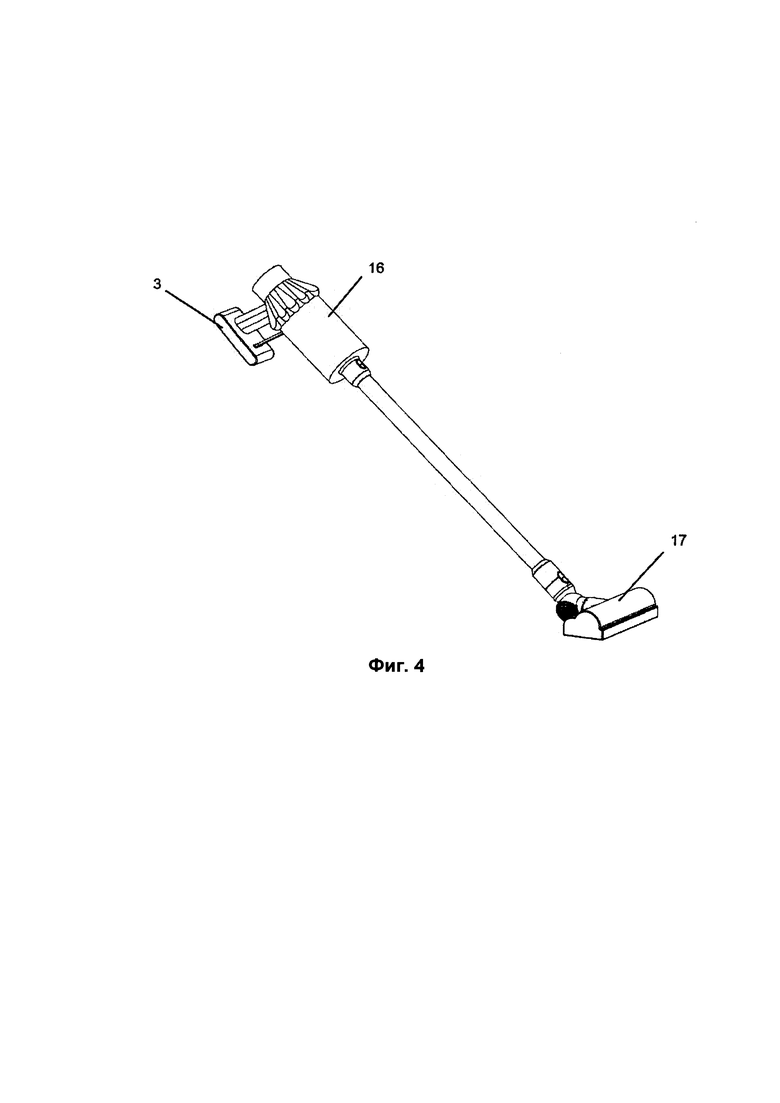
3 - аккумуляторная батарея (АКБ);
4 - мотор щетки;
5 - двигатель вентилятора/турбины;
6 - блок выравнивания;
7 - датчик температуры АКБ;
8 - датчик температуры двигателя;
9 - блок индикации;
10 - микропроцессор;
11 - преобразующий модуль Wi-Fi;
12 - устройство управления;
13 - блок анализа и фильтрации;
14 - блок памяти помех;
15 - блок приема-передачи данных по беспроводной сети, например, в приложение, установленное на портативное устройство (на чертежах не показано);
16 - основной корпус;
17 - щетка.
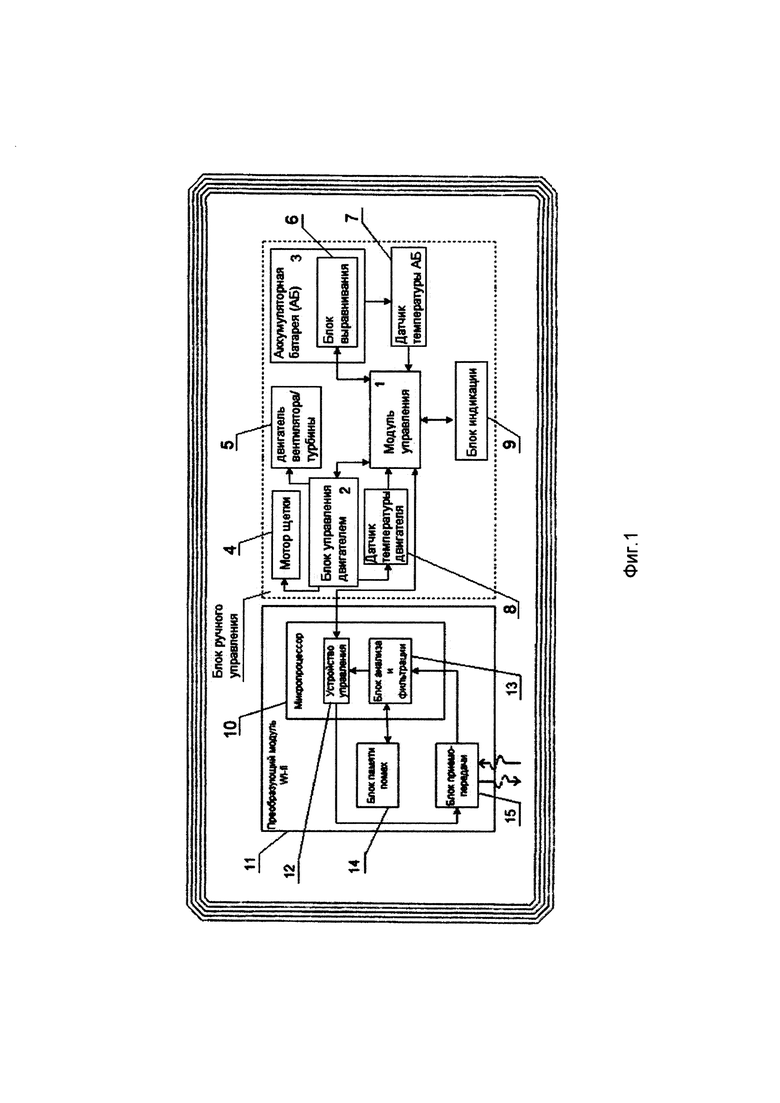
На фиг. 1 изображена блок-схема предложенного устройства.
На фиг. 2 показана структурная схема анализа поступающих сигналов микропроцессором.
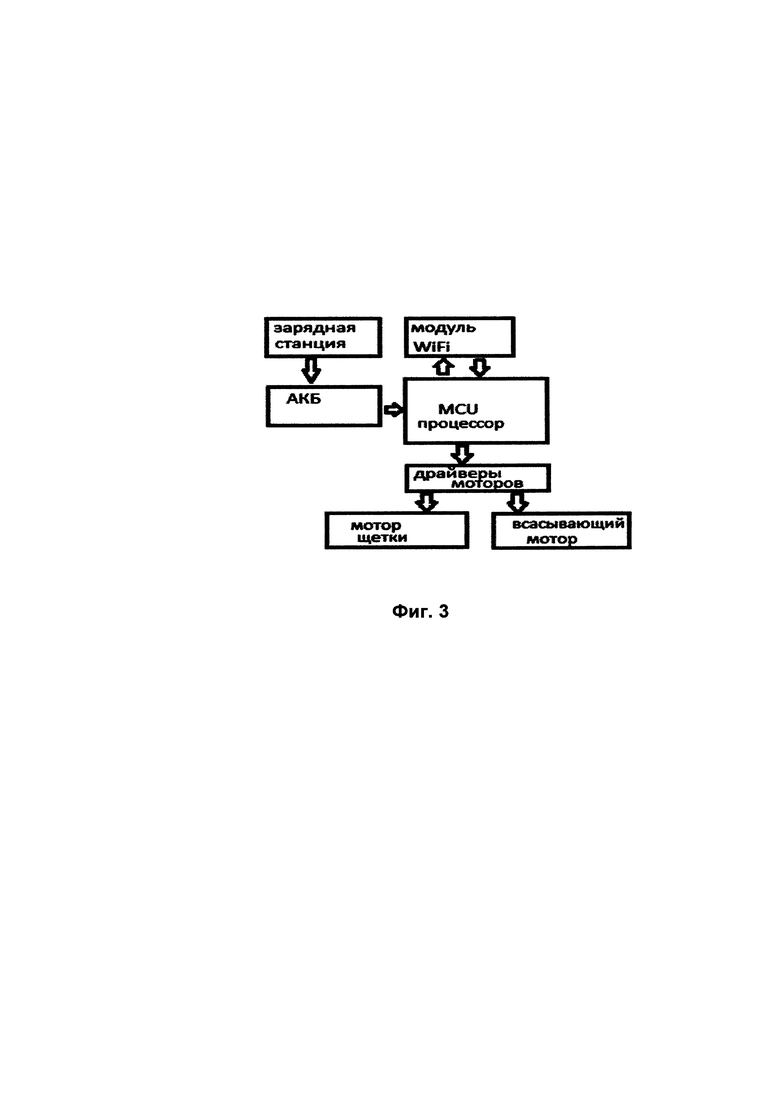
На фиг. 3 показана логическая схема управления устройством.
На фиг. 4 общий вид варианта выполнения вертикального пылесоса со встроенным беспроводным Wi-Fi-модулем.
Осуществление изобретения
С развитием беспроводной технологии WI-FI становится возможной передача данных через облако. Таким образом, узнать состояние составных блоков пылесоса, в том числе параметры аккумулятора пылесоса, можно удаленно через мобильное устройство, например, телефон, планшет, ноутбук и т.п.
В заявленном устройстве используется модуль беспроводной передачи Wi-Fi-сигнала для приема-передачи данных о состоянии пылесоса, включая параметры аккумулятора пылесоса на удаленное устройство управления, например, такое как мобильный телефон, планшет или ноутбук.
Как известно, в беспроводных сетях, в частности, в Wi-Fi-сети, в качестве среды распространения сигнала используются радиоволны, а работа устройств и передача данных в сети происходит без использования кабельных соединений. В связи с этим на работу беспроводных сетей воздействует большее количество различного рода помех. В свою очередь Wi-Fi-устройства подвержены воздействию даже небольших помех, которые создаются другими устройствами, в том числе работающими в том же частотном диапазоне.
Как известно, в беспроводных Wi-Fi-сетях используются два частотных диапазона - 2,4 и 5 ГГц. Беспроводные сети стандарта 802.11b/g работают в диапазоне 2.4 ГГц, сети стандарта 802.11а - 5 ГГц, а сети стандарта 802.11n могут работать как в диапазоне 2.4 ГГц, так и в диапазоне 5 ГГц.
Bluetooth-устройства, беспроводные клавиатуры и мыши также работают в частотном диапазоне 2.4 ГГц, а, следовательно, могут оказывать влияние на работу точки доступа и других Wi-Fi-устройств.
При этом беспроводные устройства Wi-Fi имеют ограниченный радиус действия. Например, домашний интернет-центр с точкой доступа Wi-Fi стандарта 802.11b/g имеет радиус действия до 60 м в помещении и до 400 м вне помещения.
В помещении дальность действия беспроводной точки доступа может быть ограничена несколькими десятками метров в зависимости от конфигурации комнат, наличия капитальных стен и их количества, а также других препятствий.
При этом препятствия, такие как стены, потолки, мебель, металлические двери и т.д., расположенные между Wi-Fi-устройствами, могут частично или значительно отражать/поглощать радиосигналы, что приводит к частичной или полной потере сигнала. При этом наличие капитальных стен, включающих бетон и арматуру, листового металла, штукатурки на стенах, стальных каркасов и т.п. также влияет на качество радиосигнала и может значительно ухудшать работу преобразующего модуля любого Wi-Fi-устройства, в том числе пылесоса.
Внутри помещения причиной помех радиосигнала также могут являться зеркала и тонированные окна. Даже человеческое тело ослабляет сигнал примерно на 3 dB.
В таблице 1 показаны потери эффективности сигнала Wi-Fi при прохождении через различные препятствия, которые присутствуют в помещениях. Данные приведены для сети, работающей в частотном диапазоне 2.4 ГГц.
Кроме этого на работу Wi-Fi-устройства и ухудшение качества связи Wi-Fi также влияет различная бытовая техника, работающая в зоне покрытия Wi-Fi сети.
К примеру, микроволновые СВЧ-печи ослабляют уровень сигнала Wi-Fi, так как обычно также работают в диапазоне 2,4 ГГц. Кроме этого детские радионяни - это приборы, также работающие в диапазоне 2,4 ГГц, что создает помехи и ухудшается качество связи Wi-Fi. Также на качество связи по Wi-Fi-сети влияют мониторы с электронно-лучевой трубкой, электромоторы, беспроводные динамики, работающие на частоте 2,4 или 5 ГГц, некоторые источники электрического напряжения, например, электропроводка, кабели с недостаточным экранированием, а также коаксиальные кабели и разъемы, используемые с некоторыми типами спутниковых тарелок, внешние мониторы и ЖК-экраны, работающие на частоте 2,4 ГГц, беспроводные камеры и другие устройства Wi-Fi, находящиеся в радиусе действия сети Wi-Fi.
Таким образом, различные устройства могут являться источниками помех для регистрации и передачи сигналов по сети Wi-Fi. Как указывалось выше, эти устройства могут включать средства связи и/или электронные устройства, включая как проводные, так и беспроводные устройства (например, микроволновые печи, принтеры, компьютеры, планшеты, телефоны, беспроводные телефоны, сетевые узлы, сетевые устройства, телевизионные приставки, телевизоры, радиоприемники, устройства связи), терминалы, линии электропередач, передатчики, различные протоколы связи, используемые устройствами и тому подобное.
Вместе с тем, в предложенном решении было решено использовать фильтрацию на основе данных об этих помехах. Предлагается использовать указанные помехи для создания и/или генерирования картин помех для каждого источника помех.
Общие типы помех можно разделить на взаимные помехи или помехи в совмещенных каналах CCI (co-channel interference), помехи между несущими ICI (inter-carrier interference) из-за модуляции сигнала, электромагнитные помехи EMI (electromagnetic interference) из-за излучения внешнего источника. В свою очередь данные о помехах можно использовать для создания и/или генерирования картин помех для каждого источника помех. Картины интерференции могут быть отображены на карте интерференции, которая может иллюстрировать пространственные отношения картин интерференции, источников интерференции, объектов, не излучающих радиоволны, их комбинаций и т.п. Сформированную интерференционную карту помех можно использовать для оценки неизвестного и/или нового источника помех, например, беспроводного телефона, чтобы определить, как это может повлиять на устройство приемо-передачи Wi-Fi, установленного на устройстве, например, таком как пылесос.
Таким образом, предложен вертикальный пылесос с функцией Wi-Fi, в частности, для дистанционного мониторинга его состояния, а так же управлением блоков пылесоса. При этом конструкция Wi-Fi-модуля выполнена с возможностью формирования и сохранения интерференционной картины от каждого источника помех с тем, чтобы проводить сравнение картины помех и удалять все помехи от источников помех и оставлять только картину сигнала, соответствующую сигналу Wi-Fi. Указанное особенно актуально, учитывая, что пылесос перемещается на различное расстояние от источника Wi-Fi-сигнала в процессе эксплуатации.
Необходимо повторно отметить, что каждый источник помех имеет свою уникальную интерференционную картину, и именно эти данные можно использовать для создания и/или генерирования сигнатуры помех для каждого источника помех. При этом информация об источнике помех может быть включена в сигнатуру помех, например, рабочая частота, уровень мощности сигнала, местоположение, пользовательская информация и так далее для идентификации источника помех. Чтобы определить, какой источник помех вызвал изменение картины помех, сохраненные сигнатуры помех можно сравнить с данными о помехах, собранными/полученными и сгенерированными картинами помех.
Когда помехи снижают скорость передачи сигнала, может быть скоординирован, например, уровень мощности. Также можно изменить модуляцию сигнала, чтобы улучшить отношение сигнал-шум между полезным сигналом Wi-Fi и сигналом-помехой (шумом).
Кроме этого можно определить и сетевой адрес источника помех по сигнатуре помех. Например, сетевой адрес может содержать адрес интернет-протокола, сетевой адрес, адрес управления доступом к среде (MAC), интернет-адрес и/или т.п.
Реализация преобразующего модуля пылесоса основана на использовании Wi-Fi-приемника, сконфигурированного в виде блока приемопередачи 15. При этом блок приемопередачи 15 выполнен с возможностью приема (например, сбора, сбора и измерения) сигналов от источников помех, из которых вычислительное устройство микропроцессора 10 преобразующего модуля Wi-Fi 11 может определять данные о помехах при изменении сигналов за счет проведения сравнения принятых сигналов с имеющейся базой эталонных сигналов, сохраненных в блоке памяти 14. Указанный сравнительный анализ осуществляется в блоке анализа и фильтрации 13 микропроцессора 10. При этом приемник Wi-Fi, выполненный в виде блока приемопередачи 15, может иметь множество каналов приемника, которые способны измерять относительное направление сигнала с наибольшей энергией передачи. Например, широкополосный или полноспектральный приемник в кабельном модеме, спутниковом телевидении и кабельном телевидении может быть сконфигурирован для выполнения спектрального анализа для измерения содержания энергии, включая несущую сигнала, гармонику сигнала и/или интермодуляцию сигнала. Изменения содержания энергии могут указывать на помехи и могут использоваться для определения источника помех. Например, когда содержание энергии измеряется во времени, спектральный анализ может указать приемнику, является ли источник помех частотно-модулированным сигналом или это сигнал со скачкообразной перестройкой частоты. Например, некоторые типы сигналов, такие как Bluetooth (802.15.1) и Zigbee (802.15.4), используют методы скачкообразной перестройки частоты или расширения спектра, которые можно легко обнаружить. В другом примере беспроводные и сотовые технологии, такие как усовершенствованная цифровая беспроводная связь (DECT) и множественный доступ с кодовым разделением каналов (CDMA), могут иметь четко определенную полосу пропускания.
Также преобразующий модуль 11 выполняет анализ содержания энергии во временной области и может определять частоту повторения импульсов (ЧПИ) источника помех. Анализ содержания энергии во временной области для определения ЧПИ может использоваться в ситуациях, когда анализ сигнала приводит к более чем одному типу источника помех. В одном аспекте вместо анализа сигнала можно использовать анализ во временной области, определяющий ЧПИ источника помех.
В качестве примера использования ЧПИ для определения источника помех рассмотрим микроволновые печи. Микроволновые печи передают либо непрерывную волну, либо длинные циклы сигнала, длящиеся несколько секунд или более. При этом, если сравнивать сигналы микроволновых печей с глобальной системой для мобильных сотовых передатчиков (GSM), то последние имеют относительно более высокую ЧПИ по сравнению с микроволновыми печами (примерно 216 Гц с компонентой 8 Гц). На основе ЧПИ вычислительное устройство может определить, является ли источник помех микроволновым или сотовым передатчиком GSM.
Таким образом, преобразующий модуль пылесоса 11 за счет своего конструктивного выполнения может определять источники помех, включая источники, которые имеют задокументированные характеристики (эталонные помехи), может определить тип радиочастотных помех и мощность сигнала, присутствующего в определенном месте.
При этом на этапе формирования интерференционной картины она может быть создана и/или сгенерирована на основе принятых данных интерференции. Например, интерференционная картина может содержать один или несколько из следующих элементов: радиоинтерференционная картина, микроволновая интерференционная картина, их комбинации, и тому подобное. Кроме этого интерференционная картина может содержать частотный спектр, связанный с множеством источников помех. Интерференционная картина храниться в блоке памяти помех 14 и в дальнейшем используется в качестве эталонных сигналов вычислительного устройства микропроцессора 10.
Как показано на блок-схеме на фиг. 1 устройство вертикального пылесоса включает модуль управления пылесоса 1 с контроллером (на чертежах не показан), один вывод которого выполнен с возможностью подключения к блоку питания, выполненного в виде аккумуляторной батареи АКБ 3. Аккумуляторная батарея АКБ 3 имеет в своем составе блок выравнивания 6. Блок выравнивания 6 - это часть управляющей электроники внутри аккумулятора 3, которая следит за состоянием каждой ячейки и может перераспределять заряд и разряд между ячейками, чтобы выровнять их состояние. Также АКБ 3 соединена с датчиком температуры 7, который в свою очередь соединен с модулем управления 1 для осуществления контроля температуры АКБ 3 при зарядке, разрядке и работе пылесоса. В качестве датчика температуры могут быть использованы, например, термисторы, которые встраивают в аккумулятор и контролируют его температуру, однако такой вариант выполнения на чертежах не показан. В схематическом изображении устройства показано наличие датчика температуры АКБ 7. Это важно для безопасности, так как высокая температура может быть опасной для аккумулятора. Также модуль управления 1 подключен к блоку управления двигателем 2 пылесоса. Известно, что двигатель вертикального пылесоса обычно является электрическим мотором, который создает всасывающую силу для сбора пыли и мусора с пола. Для создания всасывающей силы двигатель связан с вентилятором или турбиной 5, а также с мотором щетки пылесоса 4, который отвечает за вращение щеток или роликов на пылесосе. Это движение мотора щетки 4 активирует щетки или ролики и помогает отрывать грязь и пыль от поверхности, а затем направлять ее в поток всасываемого воздуха. Двигатель пылесоса во время работы может нагреваться, поэтому в него встроен датчик температуры 8, информация с которого передается на модуль управления 1. При увеличении температуры выше заложенного значения срабатывают встроенные механизмы охлаждения, такие как вентиляторы, чтобы предотвратить перегрев двигателя (на чертежах не показаны). Также модуль управления 1 соединен с блоком индикации 9.
Блок индикации 9 на пылесосе предназначен для того, чтобы предоставлять информацию пользователю о текущем состоянии и работе пылесоса. Этот блок может включать разные индикаторы, светодиодные дисплеи и звуковые сигналы для обеспечения информативности и удобства использования. При этом основные функции, которые имеет блок индикации пылесоса это индикация питания, индикация уровня заполнения контейнера для сбора пыли, индикация состояния фильтра, индикация мощности всасывания, индикация ошибок и т.п. В случае необходимости пылесос может быть дополнен звуковым и/или световым индикатором. При этом звуковые сигналы могут сигнализировать о различных событиях, таких как включение/выключение, окончание уборки и другие, а световые индикаторы могут включаться и сигнализировать о той или иной проблеме, возникшей в процессе работы пылесоса или сигнализировать об уровне заряда АКБ 3 и т.п.
Также блок индикации 9 может быть выполнен в виде светодиодного дисплея, на котором дополнительная информация о состоянии и настройках пылесоса.
На фиг. 1 блоки 1-9 входят в блок ручного управления пылесосом и выделены на чертеже пунктирной линией.
В соответствии с предложенным решением модуль управления с контроллером 1 последовательно соединен с помощью обратной связи с микропроцессором пылесоса 10, а именно с устройством управления 12 микропроцессора 10. В свою очередь микропроцессор пылесоса 10, а именно устройство управления 12, соединен с блоком приемопередачи 15. Микропроцессор 10 также включает блок анализа и фильтрации 13, первый вход которого подключен к выходу блока приемопередачи 15, а второй вход соединен обратной связью с блоком памяти помех 14. При этом микропроцессор пылесоса 10 со встроенным устройством управления 12 и вычислительным блоком анализа и фильтрации 13, совместно с блоком памяти помех 14 и блоком приемопередачи 15 образуют преобразующий модуль Wi-Fi 11 пылесоса.
Указанный преобразующий модуль пылесоса 11 выполняет основную функцию - это прием, фильтрация, усиление и передача на контроллер модуля управления 1 информационного Wi-Fi сигнала. При этом предложенная конструктивная реализация преобразующего модуля пылесоса 11 обеспечивает фильтрацию всех принятых сигналов-помех за счет формирования интерференционной картины, которая может содержать один или несколько из следующих элементов: радиоинтерференционная картина, микроволновая интерференционная картина и их комбинации. Кроме этого интерференционная картина может содержать частотный спектр, связанный с множеством источников помех. Интерференционная картина храниться в блоке памяти помех 14 и в дальнейшем используется в качестве эталонных сигналов вычислительного устройства микропроцессора 10, такого как блок анализа и фильтрации 13.
Таким образом, информация, переданная пользователем посредством Wi-Fi-сигнала на пылесос, всегда будет выполнена устройством пылесоса вне зависимости от того, насколько сильно указанный информационный Wi-Fi-сигнал подвергся влиянию помех от внешних устройств и/или препятствий.
Работа заявленного устройства пылесоса осуществляется следующим образом.
Перед первым включением пылесоса с функцией Wi-Fi и осуществлением работы производится сканирования области при помощи включения блока приемопередачи 15. Указанное включение может производиться вручную при помощи нажатия соответствующей кнопки на корпусе пылесоса, либо ЖК-экране пылесоса (указанные элементы широко известны и поэтому на фигурах не показаны), которое активирует блок ручного управления пылесоса для передачи сигнала на контроллер модуля управления 1 пылесоса и дальнейшую передачу команды на блок приемопередачи 15 через устройство управления 12 микропроцессора 10. После сканирования осуществляется анализ сигналов от всех существующих вокруг пылесоса источников помех при помощи блока анализа и фильтрации 13 с записью полученных данных об интерференционных картинах в память блока памяти помех 14. Этот шаг позволит обеспечить более эффективную работу преобразующего модуля 11 пылесоса. Очевидно, что в большом офисном пространстве, в котором сигнал Wi-Fi может беспрепятственно проходить десятки метров и в квартире, заставленной разного рода приборами, включая холодильник, телевизор и т.п., где сигнал Wi-Fi будет переотражаться от поверхностей, поглощаться и подвергаться влиянию электромагнитных излучений сигналов от работающих приборов, интерференционная картина помех будет существенно различаться.
Принятые сигналы помех записываются в блок памяти помех 14 в качестве дополнительных эталонных сигналов помех. Таким образом, в блоке памяти помех 14 преобразующего модуля Wi-Fi 11 формируется дополнительная база данных о полученных интерференционных картинах сигналов от множества источников помех фактически расположенных вокруг устройства вертикального пылесоса и влияющих на эффективность приема Wi-Fi сигнала. При этом в блоке памяти помех 14 имеются сохраненные данные эталонных сигналов интерференционных картин сигналов помех от задокументированных источников помех, например, такие типы сигналов, как Bluetooth (802.15.1) и Zigbee (802.15.4), которые используют методы скачкообразной перестройки частоты или расширения спектра, которые можно легко обнаружить. То есть в блоке памяти помех 14 сохраняются дополнительные данные - это данные об интерференционных картинах помех, сформированных от источников помех вокруг пылесоса. Таким образом, при осуществлении анализа сигнала в блоке анализа и фильтрации 13 их классификация будет значительно упрощена за счет сравнения с сигналами, имеющимися в блоке памяти 14 всех имеющихся в нем эталонных сигналов интерференционных картин сигналов. При этом такое первоначальное сканирование необходимо осуществить во всех комнатах квартиры и/или офиса для облегчения последующей работы пылесоса и бесперебойного получения информационного Wi-Fi-сигнала, а также передачи информационного Wi-Fi-сигнала на удаленное устройство управления.
В результате из блока анализа и фильтрации 13 в устройство управления 12 микропроцессора 10 поступает информационный управляющий Wi-Fi-сигнал, который далее передается на контроллер модуля управления 1 пылесоса.
Кроме этого устройство пылесоса может дать обратную связь пользователю через преобразующий модуль Wi-Fi 11 о состоянии рабочих блоков вертикального пылесоса, в том числе, о наличии/отсутствии достаточного уровня заряда в аккумуляторном блоке, о температуре двигателя, температуре аккумуляторной батареи, об обрабатываемой поверхности и установке необходимого уровня мощности (повышение или понижение мощности пылесоса) и т.п. В этом случае, данные с контроллера модуля управления 1 попадают на устройство управления 12 микропроцессора 10, далее передаются в блок приемопередачи 15, который излучает информационный сигнал на удаленное устройство пользователя.
Разберем конкретный пример.
Сигнал, несущий информацию о запросе уровня заряда аккумуляторной батареи (пользователь формирует удаленный запрос о текущем уровне заряда АКБ), поступает с любого из устройств, поддерживающих передачу и прием Wi-Fi-сигнала, на Wi-Fi-роутер (модем), где обрабатывается и далее принимается преобразующим модулем Wi-Fi 11 вертикального пылесоса. Блок приемопередачи 15 преобразующего модуля Wi-Fi 11 передает весь спектр сигналов, полученных из окружающего пространства, в микропроцессор 10 в блок анализа и фильтрации 13, далее по запросу блока анализа и фильтрации 13 из памяти блока памяти помех 14 передается информация об интерференционной картине эталонных помех. Блок анализа и фильтрации 13 осуществляет действия посредством раскрытого на фиг. 2 алгоритма. В частности, первоначально полученный сигнал анализируется с тем, чтобы выявить наличие «нового» сигнала, который отсутствует в базе данных блока памяти помех 14. В случае положительного решения о наличии «нового» сигнала помех, блок анализа и фильтрации 13 передает информацию об интерференционной картине новой помехи в блок памяти помех 14 и там этот сигнал сохраняется в качестве дополнительного эталонного сигнала. В случае, если полученный сигнал имеется в сохраненной базе данных эталонных сигналов, проводится сравнение полученного сигнала с сигналами из блока памяти помех 14. Далее анализируется, имеется ли среди сигналов нужный нам информационный Wi-Fi-сигнал, осуществляется фильтрация и все сигналы-помехи удаляются, а далее передается только информационный сигнал Wi-Fi.
Преобразованный сигнал поступает из управляющего устройства 12 микропроцессора 10 на контроллер модуля управления 1 пылесоса. Модуль управления 1 осуществляет подключение к блоку аккумуляторной батареи АКБ 3 вертикального пылесоса и преобразует величину существующего уровня заряда АКБ 3 пылесоса в электрический сигнал, который передается от контроллера модуля управления 1 через устройство управления 12 микропроцессора 10 в блок приемопередачи 15 и далее на Wi-Fi-роутер, а затем на одно из вышеназванных командных устройств пользователя.
В свою очередь пользователь, получив информацию об уровне заряда АКБ пылесоса, формирует задание о повышении уровня заряда АКБ до 75%. При этом указанный необходимый уровень заряда АКБ устанавливается пользователем удаленно при помощи любого устройства, поддерживающего Wi-Fi-соединение, например, компьютера, или планшета, или мобильного телефона и т.п. Сигнал, несущий информацию о необходимости зарядить АКБ до 75%, заданный пользователем, поступает с любого из указанных устройств на Wi-Fi роутер (модем), где обрабатывается и далее принимается преобразующим модулем Wi-Fi 11 вертикального пылесоса. Блок приемопередачи 15 преобразующего модуля 11 передает весь спектр сигналов, полученных из окружающего пространства в микропроцессор 10 в блок анализа и фильтрации 13, далее по запросу блока анализа и фильтрации 13 из памяти блока памяти помех 14 передается информация об интерференционной картине эталонных помех. Блок анализа и фильтрации 13 осуществляет действия посредством раскрытого на фиг. 2 алгоритма.
Преобразованный сигнал поступает из управляющего устройства 12 микропроцессора 10 на контроллер модуля управления 1 пылесоса. Модуль управления 1 осуществляет подключение к электрической сети посредством активизации аккумуляторного блока питания 3. Уровень заряда АКБ 3 контролируется посредством системы управления батареи (BMS - Battery Management System) - электронной системы, встроенной в аккумулятор, которая управляет заряд/разрядным процессом аккумуляторной батареи, отвечает за безопасность ее работы, проводит мониторинг состояния батареи, оценку вторичных данных работоспособности.
При этом сигнал об уровне заряда АКБ поступает на контроллер модуля управления 1, который сравнивает уровень заряда с тем уровнем, который задан удаленным командным устройством (например, таким как компьютер, планшет, мобильный телефон) и когда он достигает 75%, отключает пылесос от электрической сети. При этом информационный сигнал о достижении заданного уровня заряда АКБ 3 пылесоса от контроллера модуля управления 1 через микропроцессор 10, а именно устройство управления 12 поступает в блок приемопередачи 15 и далее передается на Wi-Fi-роутер, а затем на одно из вышеназванных командных устройств пользователя.
Таким образом, пользователь получает информацию как о первоначальном уровне заряда АКБ 3 пылесоса, так и об уровне заряда АКБ 3, соответствующего заданному пользователем значению. При этом команда от устройства пользователя будет выполнена даже в случае ослабления Wi-Fi сигнала, так как предложенное решение обеспечит стабильное Wi-Fi-соединение вне зависимости от месторасположения Wi-Fi-роутера (далеко от места расположения вертикального пылесоса, например, в другой комнате) и шумов, возникающих при работе разного рода устройств (смарт-ТВ, микроволновые печи, игровые приставки, холодильник и т.п.).
Как следует из всего сказанного выше за счет обработки сигналов в преобразующем модуле Wi-Fi 11 обеспечивается повышение качества Wi-Fi-связи, что в свою очередь обеспечивает повышение стабильности подключения вертикального пылесоса к беспроводной сети Wi-Fi для дистанционного управления режимами его работы и мониторинга входящих в его состав блоков.
В качестве приложения для удаленного управления может использоваться приложение IQ НОМЕ.
Прием и передача данных между портативным устройством с установленным приложением и устройством, принимающим команды (блоком приемопередачи в корпусе пылесоса), осуществляется с использованием такого вида связи/соединения как Wi-Fi.
Таким образом, предложенный вертикальный пылесос с функцией Wi-Fi, включающий перечисленные выше элементы, обеспечивает как удаленное управление, так и удаленный мониторинг состояния блоков пылесоса из приложения при помощи Wi-Fi-сети за счет эффективной функции автоматической фильтрации полученного информационного Wi-Fi-сигнала от помех, создаваемых устройствами и препятствиями, окружающими пылесос, что повышает стабильность Wi-Fi-соединения и бесперебойную работу удаленного управления и мониторинга пылесоса.
При этом очевидно, что принцип работы вертикального пылесоса может быть любой, в том числе:
1) Вертикальный - электродвигатель, щетка и ручка составляют единое целое. Для удобства может быть телескопическая или составная удлиняющая труба всасывания.
2) Вертикальный/ручной - комбинированная модель, которая трансформируется из вертикального пылесоса в ручной. Ручная часть мобильная и подходит для уборки небольших поверхностей - мебели, кухонного стола, салона автомобиля, очистки труднодоступных мест, куда можно дотянуться рукой, но сложно добраться всем пылесосом в сборе.
3) Только для сухой уборки - классический способ уборки при помощи воздуха и давления. Мусор собирается в сухом виде. Для сбора может использоваться контейнер или емкость с водой.
4) Для влажной уборки - с использованием воды или пара. Функция влажной уборки может быть реализована разными способами. Это и полноценный парогенератор с непрерывной подачей пара или съемный резервуар с водой, который смачивает тряпку из микрофибры.
5) С верхним пылесборником - пылесос без особых проблем можно поднять и пропылесосить им потолочные углы.
6) С нижним пылесборником - пылесос может храниться вертикально без опоры, но из-за смещенного центра тяжести трудно поднять его высоко.
7) С циклонным фильтром - такой фильтр использует вихревой поток большой скорости и помещает всю грязь в пластиковый контейнер. Для того, чтобы уловить мелкие частицы пыли, размером от 0,1 мкм до 1,0 мкм, на выходе электродвигателя устанавливают фильтр тонкой очистки (ЕРА/НЕРА).
8) С аквафильтром - такой фильтр смачивает загрязненный воздух, пыль намокает и оседает на фильтре. Аквафильтр имеет высокий показатель удержания частиц пыли и дополнительно увлажняет воздух, но также нуждается в постфильтрации воздуха фильтром НЕРА.
Главным образом необходимо реализовать назначение вертикального пылесоса, а именно для уборки пыли и загрязнений с поверхностей посредством всасывания потоком воздуха.
В свою очередь посредством Wi-Fi реализуются следующие основные функции заявленного устройства:
1) установка целевой мощности в зависимости от поверхности (пол, ковер, кафель);
2) контроль и мониторинг уровня заряда АКБ;
3) регулировка интенсивности всасывания;
4) регулировка скорости вращения основной щетки;
5) статистика проведенных уборок;
6) рекомендации по уборке и по уходу за прибором;
7) информирование пользователя об ошибках и необходимости проведения сервисного обслуживания;
8) удаленное информирование пользователя: недостаточный уровень заряда АКБ, перегрев двигателя, перегрев АКБ, об остаточном времени работы устройства, об общем времени работы устройства для уборки заданной площади с учетом покрытий и т.п.;
9) возможность создания пользователем персональных режимов, наиболее подходящих под его требования.
Как следует из описания возможных выполнений заявленного изобретения, предложенный вертикальный пылесос с функциями удаленного управления и мониторинга состояния его рабочих блоков обеспечивает достижение заявленного технического результата, заключающегося в повышении стабильности подключения пылесоса к беспроводной сети Wi-Fi при сохранении высокой эффективности работы устройства пылесоса в целом и работы блока приемопередачи Wi-Fi сигналов, встроенного в пылесос, в частности.
Учитывая новизну совокупности существенных признаков, техническое решение поставленной задачи, существенность всех общих и частных признаков изобретения, доказанных в разделе «Уровень техники» и «Раскрытие изобретения»; доказанную в разделе «Осуществление и промышленная реализация изобретения» техническую осуществимость и промышленную применимость предложенного устройства; решение поставленных задач и уверенное достижение требуемого технического результата при реализации и использовании изобретения, по нашему мнению, заявленное устройство удовлетворяет всем требованиям охраноспособности, предъявляемым к изобретениям.
Проведенный анализ показывает также, что все общие и частные признаки изобретения являются существенными, так как каждый из них необходим, а все вместе они не только достаточны для достижения цели изобретения, но и позволяют реализовать ее промышленным способом.
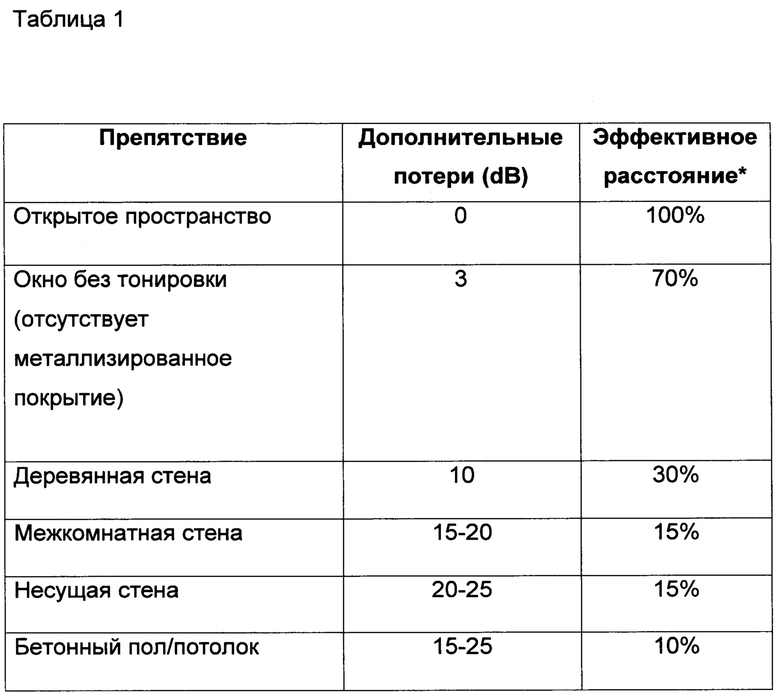
* Эффективное расстояние - это величина уменьшения радиуса действия сигнала Wi-Fi после прохождения препятствия по сравнению с открытым пространством, %.

Изобретение относится к бытовым устройствам с Wi-Fi-соединением. Сущность: вертикальный пылесос с функцией Wi-Fi состоит из основного корпуса, всасывающей трубки, электрической щетки для пола, генератора воздушного потока, модуля управления с контроллером, фильтра, блока питания, WiFi-модуля и ручки, отличающийся тем, что дополнительно содержит соединенный с модулем управления преобразующий модуль Wi-Fi, выполненный с возможностью приемопередачи, регистрации и фильтрации Wi-Fi-сигнала на фоне помех, регистрируемых блоком приемопередачи Wi-Fi сигналов, вход которого связан с устройством управления микропроцессора, а выход с блоком анализа и фильтрации, соединенного с блоком памяти помех. Технический результат заключается в повышении стабильности подключения пылесоса к беспроводной сети Wi-Fi для дистанционного управления режимами его работы и мониторинга состояния рабочих блоков, при сохранении высокой эффективности работы устройства пылесоса в целом и работы блока приемопередачи Wi-Fi-сигналов, встроенного в вертикальный пылесос, в частности. 4 ил., 1 табл.
Вертикальный пылесос с функцией Wi-Fi состоит из основного корпуса, всасывающей трубки, электрической щетки для пола, генератора воздушного потока, модуля управления с контроллером, фильтра, блока питания, Wi-Fi-модуля и ручки, отличающийся тем, что дополнительно содержит соединенный с модулем управления преобразующий модуль Wi-Fi, выполненный с возможностью приемопередачи, регистрации и фильтрации Wi-Fi-сигнала на фоне помех, регистрируемых блоком приемопередачи Wi-Fi-сигналов, вход которого связан с устройством управления микропроцессора, а выход с блоком анализа и фильтрации, соединенным с блоком памяти помех.
| US 2021137338 A1, 13.05.2021 | |||
| US 2019183305 A1, 20.06.2019 | |||
| CN 110058534 A, 26.07.2019 | |||
| US 2021259492 A1, 26.08.2021. |

