Область техники
Настоящее изобретение в целом относится к газотурбинным двигателям и относится к способу получения данных об отклонении скорости вращения для газотурбинных двигателей.
Уровень техники
Газотурбинные двигатели содержат следующие секции: компрессор, отсек сгорания и турбину. Газотурбинные двигатели также содержат систему управления, которая, помимо прочего, контролирует системы газотурбинного двигателя.
В патенте США № 10151215, выданном Raimondo и соавт., описана система управления для газотурбинного двигателя. В вариантах осуществления система управления содержит контроллер и высокоскоростное устройство для регистрации. Контроллер получает значения датчиков от датчиков, соединенных с газотурбинным двигателем, и публикует карту пороговых значений срабатывания. Высокоскоростное устройство для регистрации считывает значения датчиков из контроллера. Высокоскоростное устройство для регистрации проверяет заголовок карты на предмет изменения заголовка карты с предопределенным интервалом считывания карты, устанавливает флаг, когда заголовок карты был изменен, и считывает карту во время следующего цикла интервала считывания карты. Система управления сохраняет временные отметки, присвоенные значениям датчиков и пороговым значениям срабатывания на одной и той же временной оси.
Настоящее изобретение направлено на преодоление одной или более проблем, выявленных авторами изобретения или известных из уровня техники.
Сущность изобретения
В данном документе раскрыты способы контроля газотурбинного двигателя. В вариантах осуществления способ включает записывание скорости вращения ротора турбокомпрессора, полученной от датчика, и временной отметки, связанной со скоростью вращения ротора турбокомпрессора. Способ дополнительно включает обнаружение начала события превышения допустимой скорости вращения, если скорость вращения ротора турбокомпрессора превышает пороговое значение срабатывания. Способ дополнительно включает, в ответ на обнаружение начала события превышения допустимой скорости вращения, обнаружение окончания события превышения допустимой скорости вращения, если скорость вращения ротора турбокомпрессора опускается ниже порогового значения уставки. Способ дополнительно включает, в ответ на обнаружение события превышения допустимой скорости вращения, генерирование метки, которая содержит значение события превышения допустимой скорости вращения, скорость вращения ротора турбокомпрессора и временную отметку. Способ дополнительно включает считывание метки для обнаружения события превышения допустимой скорости вращения. Способ дополнительно включает, в ответ на обнаружение события превышения допустимой скорости вращения, регистрирование множества меток, содержащих значение события превышения допустимой скорости вращения, скорость вращения ротора турбокомпрессора, временную отметку, от начала события превышения допустимой скорости вращения до окончания события превышения допустимой скорости вращения.
Краткое описание фигур
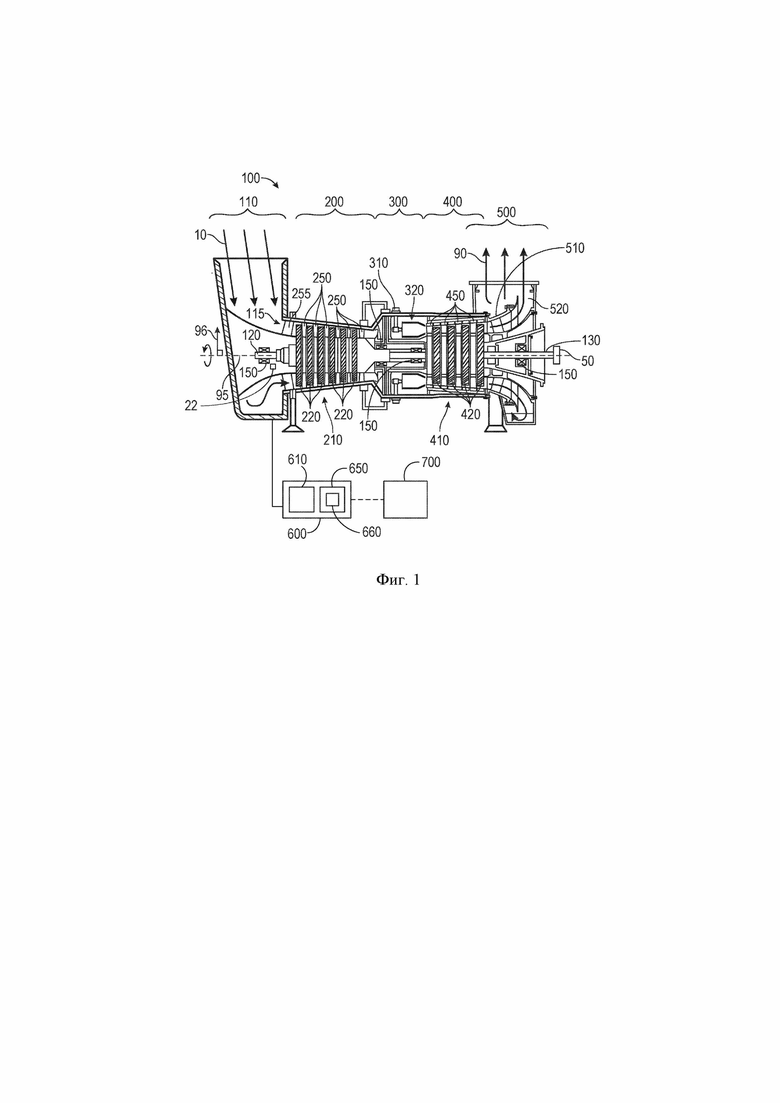
На фиг. 1 представлена схематическая иллюстрация иллюстративного газотурбинного двигателя;
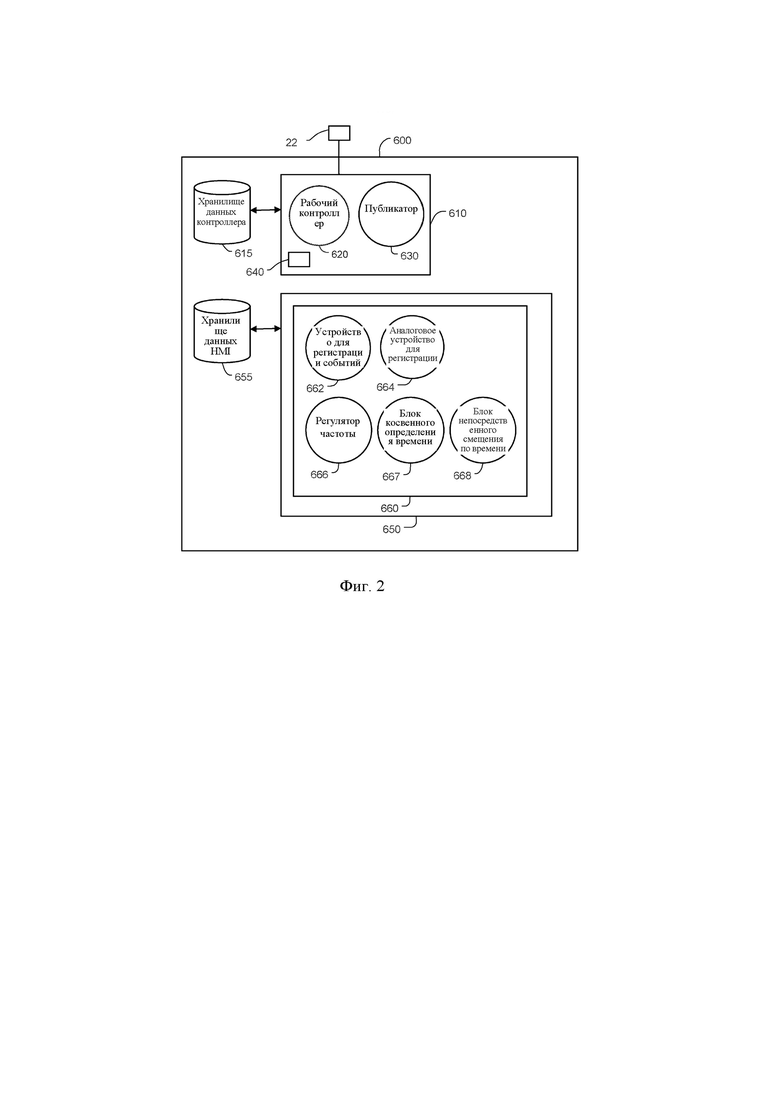
на фиг. 2 представлена функциональная структурная схема системы управления по фиг. 1; и
на фиг. 3 представлена блок-схема способа регистрирования информации, относящейся к событию превышения допустимой скорости вращения ротора турбокомпрессора газотурбинного двигателя с системой управления по фиг. 1 и 2.
Подробное описание
Система и способы, описанные в настоящем документе, включают систему управления для осуществления управления и контроля применительно к машине с высокой скоростью оборотов, такой как газотурбинный двигатель. Хотя в вариантах осуществления системы и способов описан газотурбинный двигатель, система и способы могут использоваться с другими машинами с высокой скоростью оборотов, такими как дизельные или газовые двигатели. В вариантах осуществления система управления содержит контроллер и высокоскоростное устройство для регистрации. Контроллер опрашивает датчик, соединенный с газотурбинным двигателем, и контролирует газотурбинный двигатель на предмет событий. Высокоскоростное устройство для регистрации получает данные, связанные с датчиком и событиями, от контроллера и сохраняет временные отметки, соответствующие данным, связанным с датчиком и событиями.
На фиг. 1 представлена схематическая иллюстрация иллюстративной машины с высокой скоростью оборотов. В изображенном варианте осуществления машина с высокой скоростью оборотов представляет собой газотурбинный двигатель 100. Некоторые поверхности были опущены или преувеличены (на этой и на других фигурах) для ясности и простоты объяснения. Также настоящее изобретение может ссылаться на переднее и заднее направление. В целом все ссылки на «передний» и «задний» связаны с направлением потока первичного воздуха (т. е. воздуха, используемого в процессе сгорания), если не указано иное. Например, передний является «расположенным выше по потоку» по отношению к направлению потока первичного воздуха и задний является «расположенным ниже по потоку» по отношению к направлению потока первичного воздуха.
В дополнение, описание может в целом ссылаться на центральную ось 95 вращения газотурбинного двигателя, которая может в целом быть определена продольной осью его вала 120 компрессора и вала 130 силовой турбины (удерживаемого несколькими подшипниками 150 в сборе). Центральная ось 95 может быть общей или совместной с различными другими концентричными компонентами двигателя. Все ссылки на радиальное, осевое и окружное направления и измерения относятся к центральной оси 95, если не указано иное, и такие термины, как «внутренний» и «наружный», в целом указывают на меньшую или большую удаленность в радиальном направлении, при этом радиус 96 может проходить в любом направлении, перпендикулярном центральной оси 95 и отходящем наружу от нее.
Газотурбинный двигатель 100 содержит впуск 110, вал 120 компрессора, турбокомпрессор или компрессор 200, отсек 300 сгорания, топливную систему 80, турбину 400, выпуск 500 для отработавших газов и муфту 50 для передачи выходной мощности. Газотурбинный двигатель 100 может быть в конфигурации с двумя валами, где вал 130 силовой турбины является отдельным от вала 120 компрессора, или может быть в конфигурации с одним валом, где вал 130 силовой турбины и вал 120 компрессора образуют части одного вала.
Компрессор 200 может содержать ротор компрессора в сборе 210, неподвижные лопатки 250 компрессора («статоры») и впускные направляющие лопатки 255. Ротор компрессора в сборе 210 (также называемый ротором компрессора) механически соединен с валом 120 компрессора. Как показано, ротор компрессора в сборе 210 представляет собой ротор осевого потока в сборе. Ротор компрессора в сборе 210 содержит один или более дисков компрессора в сборе 220. Каждый диск компрессора в сборе 220 содержит диск ротора компрессора, который по окружности заполнен лопастями ротора компрессора. Статоры 250 в осевом направлении следуют за каждым из дисков компрессора в сборе 220. Каждый диск компрессора в сборе 220, спаренный со смежными статорами 250, которые следуют за диском компрессора в сборе 220, считается ступенью компрессора. Компрессор 200 содержит множество ступеней компрессора. Входные направляющие лопатки 255 в осевом направлении предшествуют первой ступени компрессора.
Отсек 300 сгорания содержит один или более топливных инжекторов 310 и камеру 320 сгорания.
Турбина 400 содержит ротор турбины в сборе 410 и сопла 450 турбины. Ротор турбины в сборе 410 может быть механически соединен с валом 120 компрессора и валом 130 турбины. Как показано, ротор турбины в сборе 410 представляет собой ротор осевого потока в сборе. Ротор турбины в сборе 410 содержит один или более дисков турбины в сборе 420. Каждый диск турбины в сборе 420 содержит диск турбины, который по окружности заполнен лопатками турбины. Сопла 450 турбины, например сопловое кольцо, в осевом направлении предшествуют каждому из дисков турбины в сборе 420. Каждое сопло 450 турбины сгруппировано с другими с помощью разных способов так, чтобы образовывать кольцо. Каждый диск турбины в сборе 420, спаренный со смежным соплом 450 турбины, которое предшествует диску турбины в сборе 420, считается ступенью турбины. Турбина 400 содержит несколько ступеней турбины.
Выпуск 500 для отработавших газов содержит диффузор 510 отработавших газов и коллектор 520 отработавших газов.
Один или более из вышеуказанных компонентов (или их составляющих) может быть выполнен из нержавеющей стали и/или долговечных высокотемпературных материалов, известных как «суперсплавы». Суперсплав или сплав с высокими прочностными характеристиками представляет собой сплав, который характеризуется очень высокой механической прочностью и сопротивлением ползучести при высоких температурах, надлежащей стабильностью поверхности и стойкостью к коррозии и окислению. Суперсплавы могут включать такие материалы, как HASTELLOY, INCONEL, WASPALOY, сплавы RENE, сплавы HAYNES, INCOLOY, MP98T, сплавы TMS и монокристаллические сплавы CMSX.
Газотурбинный двигатель 100 также содержит датчик, который может использоваться для осуществления контроля и управления газотурбинным двигателем 100. Датчик может включать в себя датчик 22 скорости вращения вала. Датчик 22 скорости вращения вала может использоваться для измерения скорости вращения ротора компрессора в сборе 210, которая также называется скоростью вращения ротора турбокомпрессора (NGP). В конфигурации с двумя валами может использоваться отдельный датчик для измерения скорости вращения ротора силовой турбины (NPT).
Газотурбинный двигатель 100 также содержит систему 600 управления. Система 600 управления содержит контроллер 610 и человеко-машинный интерфейс (HMI) 650. Контроллер 610 может быть выполнен с возможностью получения значений от датчика, соединенного с газотурбинным двигателем 100, для осуществления контроля и управления газотурбинным двигателем 100. Контроллер 610 может контролировать газотурбинный двигатель 100 на предмет событий, таких как внезапное увеличение или уменьшение скорости вращения ротора компрессора в сборе 210.
В одном варианте осуществления система 600 управления реализована с помощью одного или более процессоров, запоминающего устройства и программного обеспечения. Контроллер 610 может использовать датчик 22 скорости вращения вала для того, чтобы определить тип происходящего события, такой как событие штатного режима работы или событие превышения допустимой скорости вращения, или может быть предупрежден о событии превышения допустимой скорости вращения другим процессом газотурбинного двигателя 100.
Начало события превышения допустимой скорости вращения может быть определено как начинающееся с превышением порогового значения срабатывания и оканчивающееся с достижением порогового значения уставки. Пороговое значение срабатывания и пороговое значение уставки могут быть определены применительно к NGP, измеренной датчиком 22 скорости вращения вала. В одном примере пороговое значение срабатывания может быть превышено, если NGP, измеренная датчиком 22 скорости вращения вала, превышает 100% предопределенной максимальной проектной скорости вращения ротора турбокомпрессора, которая иногда называется максимальной проектной скоростью вращения.
Когда NGP становится меньше порогового значения уставки, это может считаться окончанием события превышения допустимой скорости вращения. В одном примере пороговое значение уставки может быть пройдено, если в этот момент есть активное событие превышения допустимой скорости вращения и если NGP составляет менее 100% предопределенной максимальной проектной скорости вращения ротора турбокомпрессора.
В одном варианте осуществления может быть несколько уровней событий превышения допустимой скорости вращения, определенных таким образом, чтобы представлять разные уровни/значения событий превышения допустимой скорости вращения. Например, может быть событие превышения допустимой скорости вращения первого уровня, событие превышения допустимой скорости вращения второго уровня и событие превышения допустимой скорости вращения третьего уровня. В одном примере событие превышения допустимой скорости вращения третьего уровня начинается при более высокой NGP, чем события превышения допустимой скорости вращения первого уровня и второго уровня. Это означает, что события превышения допустимой скорости вращения первого уровня и второго уровня происходят во время события превышения допустимой скорости вращения третьего уровня.
Каждый уровень события превышения допустимой скорости вращения может иметь соответствующий уровень порогового значения срабатывания. Например, может быть пороговое значение срабатывания первого уровня, пороговое значение срабатывания второго уровня и пороговое значение срабатывания третьего уровня. В одном примере пороговое значение срабатывания первого уровня может происходить при NGP, составляющей 101,5% максимальной проектной скорости вращения, пороговое значение срабатывания второго уровня может происходить при NGP, составляющей 103,75% максимальной проектной скорости вращения, и пороговое значение срабатывания третьего уровня может происходить при NGP, составляющей 105% максимальной проектной скорости вращения. В других примерах уровни порогового значения срабатывания могут быть установлены таким образом, чтобы происходить при большом разнообразии NGP и процентных значений NGP относительно максимальной проектной скорости вращения. Хотя здесь было описано три уровня пороговых значений срабатывания, может быть четыре, пять, шесть, семь, восемь, девять или более уровней пороговых значений срабатывания. Во время работы газотурбинного двигателя 100 может быть несколько превышений пороговых значений срабатывания первого уровня, второго уровня и третьего уровня. Например, первое пороговое значение срабатывания первого уровня, второе пороговое значение срабатывания первого уровня, третье пороговое значение срабатывания первого уровня и так далее.
Каждое пороговое значение срабатывания может представлять начало события превышения допустимой скорости вращения, которое может сопровождаться пороговым значением уставки, представляющим окончание события превышения допустимой скорости вращения.
В одном варианте осуществления есть несколько уровней порогового значения уставки, таких как пороговое значение уставки первого уровня, пороговое значение уставки второго уровня и пороговое значение уставки третьего уровня. В одном примере пороговое значение уставки первого уровня может происходить при NGP, составляющей 101% максимальной проектной скорости вращения, пороговое значение уставки второго уровня может происходить при NGP, составляющей 103,25% максимальной проектной скорости вращения, и пороговое значение уставки третьего уровня может происходить при NGP, составляющей 104,5% максимальной проектной скорости вращения. В одном примере пороговое значение уставки в общем на 0,5% меньше соответствующего порогового значения срабатывания. В одном примере пороговое значение уставки в общем на 1,0% меньше соответствующего порогового значения срабатывания.
Хотя здесь было описано три уровня пороговых значений уставки, может быть четыре, пять, шесть, семь, восемь, девять или более уровней пороговых значений уставки. Во время работы газотурбинного двигателя 100 может быть несколько превышений пороговых значений уставки первого уровня, второго уровня и третьего уровня. Например, первое пороговое значение уставки первого уровня, второе пороговое значение уставки первого уровня, третье пороговое значение уставки первого уровня и так далее.
В одном варианте осуществления событие штатного режима работы происходит во время штатного режима работы газотурбинного двигателя, например, когда NGP составляет от 94% до 100% максимальной проектной скорости вращения ротора компрессора. В других примерах NGP в общем составляет 100% максимальной проектной скорости вращения во время штатного режима работы газотурбинного двигателя. В одном примере верхняя граница штатного режима работы газотурбинного двигателя 100 проходит до порогового значения срабатывания и газотурбинный двигатель 100 возвращается в состояние штатного режима работы, когда NGP опускается ниже порогового значения уставки.
В некоторых вариантах осуществления HMI 650 содержит высокоскоростное устройство 660 для регистрации (HSR), выполненное с возможностью получения и записи значений NGP (также иногда называемых значениями) датчика 22 скорости вращения вала и событий, зарегистрированных контроллером 610, включая события превышения допустимой скорости вращения, штатный режим работы и другие события, такие как события, связанные с рабочим циклом газотурбинного двигателя (запуск, выключение, изменение нагрузки и т. д.). В других вариантах осуществления HSR 660 может содержаться в устройстве, присоединенном к контроллеру 610. HMI 650 может быть соединен с системой 700 контроля. Специалист по эксплуатации может временно присоединить систему 700 контроля к HMI 650 для получения информации, записанной HSR 660, и для анализа и диагностирования любых проблем с газотурбинным двигателем 100. В некоторых вариантах осуществления HMI 650 присоединен к системе 700 контроля по сети для обеспечения удаленного контроля и диагностики информации, записанной HSR 660. Удаленный контроль может осуществляться на объекте или за пределами объекта применительно к газотурбинному двигателю 100.
На фиг. 2 представлена функциональная структурная схема системы 600 управления по фиг. 1. Контроллер 610 может содержать рабочий контроллер 620 и публикатор 630. Рабочий контроллер 620 выполнен с возможностью управления газотурбинным двигателем 100 во время работы газотурбинного двигателя 100. Рабочий контроллер 620 может использовать значения, полученные от различных датчиков, для управления газотурбинным двигателем 100.
Публикатор 630 выполнен с возможностью записи массива, который относится, помимо прочего, к каждому типу событий, и значений NGP, полученных от датчика 22 скорости вращения вала. Тип события может характеризовать условия штатного режима работы и условия превышения скорости вращения, например при начале события превышения допустимой скорости вращения, окончании события превышения допустимой скорости вращения, во время события превышения допустимой скорости вращения и на разных уровнях событий превышения допустимой скорости вращения.
Метка может быть присвоена, помимо прочего, каждому типу событий для идентификации зарегистрированного значения NGP, связанной временной отметки и типа происходящего события. Метка может содержать накопленные значения счета, связанные с общим количеством раз, когда каждый уровень события превышения допустимой скорости вращения происходил в газотурбинном двигателе. Каждая метка может быть связана с уникальным идентификатором для идентификации связанной с ним метки. Каждый уникальный идентификатор может быть связан с типом события, временной отметкой и зарегистрированным значением NGP в массиве. Уникальный идентификатор может представлять собой число, используемое для идентификации метки. Метки могут быть уникальными для данного газотурбинного двигателя 100.
Временная отметка представляет собой временное значение, такое как дата и время суток, когда произошло событие и когда было получено значение NGP. В некоторых вариантах осуществления публикатор 630 регистрирует временные отметки на основании часов 640 контроллера для событий, а не для значений, полученных от датчика 22 скорости вращения вала. В некоторых вариантах осуществления контроллер 610 считывает временные отметки на основании часов 640 контроллера для значений NGP, полученных от датчика 22 скорости вращения вала. Эти значения NGP и соответствующие временные отметки могут временно храниться в хранилище 615 данных контроллера системы 600 управления в течение предопределенного периода времени. Например, значения NGP и соответствующие временные отметки во время события штатного режима работы могут временно храниться в течение одного часа в хранилище 615 данных контроллера перед тем, как их постепенно заменят новые значения. Период времени для временно сохраненных значений может быть увеличен или уменьшен.
HSR 660 может начать считывание меток из публикатора 630 после обнаружения события превышения допустимой скорости вращения. HSR 660 может регистрировать опубликованную метку, когда в метке присутствует значение события превышения допустимой скорости вращения. Если происходит событие превышения допустимой скорости вращения, временные значения, сохраненные в хранилище 615 данных контроллера, могут быть зарегистрированы с помощью HSR 660. Например, если происходит событие превышения допустимой скорости вращения, HSR 660 может записывать все предыдущие временно сохраненные значения и метки данных, начиная с 1 минуты перед временной отметкой начала события превышения допустимой скорости вращения, когда было превышено пороговое значение срабатывания. Когда NGP опускается ниже порогового значения уставки и событие превышения допустимой скорости вращения завершается, HSR 660 может продолжать записывать все значения и метки данных, начиная с 15 минут после порогового значения уставки.
Для значений NGP, полученных от датчика 22 скорости вращения вала, зарегистрированное значение может быть значением с плавающей запятой, полученным от датчика 22 скорости вращения вала. В вариантах осуществления эти значения являются аналоговыми значениями, полученными от датчика 22 скорости вращения вала.
Когда происходит событие, уникальный идентификатор, смещение для уникального определения временной отметки и зарегистрированное значение NGP могут быть упакованы в 32-битные слова, которые затем могут быть упакованы в массив. При опросе датчика 22 скорости вращения вала зарегистрированное значение может быть сохранено в 32-битное слово, которое затем может быть упаковано в массив.
В некоторых вариантах осуществления массив может быть разделен на массив событий и на массив аналоговых значений. Уникальные идентификаторы, временные отметки и типы событий упаковываются в массив событий, зарегистрированные значения для датчика 22 скорости вращения вала упаковываются в массив аналоговых значений.
Публикатор 630 может быть выполнен с возможностью публикации метки события, которое произошло в пределах последнего временного диапазона предопределенного интервала. Метка включает в себя временную отметку метки. Временная отметка метки является временем согласно часам 640 контроллера, когда опубликована метка. Эта метка также может содержать уникальные идентификаторы, тип события и смещение для каждого события. Смещение для каждого события может представлять собой количество времени, когда было зарегистрировано событие, относительно временной отметки метки. В некоторых вариантах осуществления смещение выражено в миллисекундах.
HSR 660 содержит устройство 662 для регистрации событий, аналоговое устройство 664 для регистрации, регулятор 666 частоты, блок 667 косвенного определения времени и блок 668 непосредственного смещения по времени. В системе с однородным опрашиванием все временные отметки должны относиться к одной и той же временной оси. Различные процессы HSR 660 выполнены с возможностью создания виртуальной оси времени, которая имитирует часы 640 контроллера 610 для того, чтобы сохранять все временные отметки на одной и той же временной оси. HSR 660 может ограничивать количество регистрируемых событий. Например, после того, как произошло 20 событий превышения допустимой скорости вращения, каждое последующее регистрируемое событие превышения допустимой скорости вращения может вытеснять наиболее старое событие превышения допустимой скорости вращения.
Устройство 662 для регистрации событий может быть выполнено с возможностью считывания метки как только она опубликована публикатором 630. Устройство 662 для регистрации событий проверяет метку с предопределенным интервалом и ищет тип события превышения допустимой скорости вращения. Предопределенный интервал может иметь сравнительно высокую частоту, например раз в каждые 100 миллисекунд, по сравнению с интервалом, с которым публикатор 630 публикует метку. Если тип события метки меняется из значения события штатного режима работы на значение события превышения допустимой скорости вращения, устройство 662 для регистрации событий устанавливает флаг, позволяющий регистрировать всю метку.
Устройство 662 для регистрации событий может регистрировать длительность события превышения допустимой скорости вращения и количество событий превышения допустимой скорости вращения. Устройство 662 для регистрации событий может непрерывно регистрировать события превышения допустимой скорости вращения и предоставлять общий счет событий, который дискретно увеличивается каждый раз, когда происходит событие. Например, если происходит первое событие превышения допустимой скорости вращения первого уровня, второе событие превышения допустимой скорости вращения первого уровня и третье событие превышения допустимой скорости вращения первого уровня, то общий счет событий будет равен трем. Если происходит четвертое событие превышения допустимой скорости вращения первого уровня, общий счет событий увеличивается до четырех. Устройство 662 для регистрации событий может непрерывно регистрировать события превышения допустимой скорости вращения каждого уровня событий превышения допустимой скорости вращения. Например, если происходит первое событие превышения допустимой скорости вращения первого уровня и первое событие превышения допустимой скорости вращения второго уровня, общий счет событий будет равен одному и счет событий второго уровня будет равен одному и, для этого примера, счет событий третьего уровня будет равен нулю.
Длительность события превышения допустимой скорости вращения может представлять собой время между началом события превышения допустимой скорости вращения и окончанием события превышения допустимой скорости вращения. Устройство 662 для регистрации событий может регистрировать длительность нескольких событий превышения допустимой скорости вращения.
Например, длительность события превышения допустимой скорости вращения для первого события превышения допустимой скорости вращения первого уровня, второго события превышения допустимой скорости вращения первого уровня и третьего события превышения допустимой скорости вращения первого уровня. Устройство 662 для регистрации событий может сохранять общую суммарную длительность событий для пороговых значений срабатывания и пороговых значений уставки. Например, общую суммарную длительность для всех пороговых значений срабатывания первого уровня и пороговых значений уставки первого уровня.
Аналоговое устройство 664 для регистрации может работать параллельно с устройством 662 для регистрации событий. Аналоговое устройство 664 для регистрации может считывать значения, полученные для датчика 22 скорости вращения вала от контроллера 610, или опубликованную метку с предопределенным интервалом, например раз в 100 миллисекунд. Аналоговое устройство 664 для регистрации присваивает временную отметку каждому значению, полученному от контроллера 610, на основании следующей формулы:
где  является присвоенной временной отметкой,
является присвоенной временной отметкой,  является временем на виртуальной оси времени, когда HMI 650 получает значения, и
является временем на виртуальной оси времени, когда HMI 650 получает значения, и  является временем на виртуальной оси времени, когда был отправлен запрос на считывание значений.
является временем на виртуальной оси времени, когда был отправлен запрос на считывание значений.
Аналоговое устройство 664 для регистрации может регистрировать максимальную NGP, которая происходит в газотурбинном двигателе, когда обнаружено пороговое значение срабатывания первого уровня.
Задержки операционной системы HMI 650 могут влиять на точную скорость, с которой блок 668 непосредственного смещения по времени считывает значения, полученные от датчика 22 скорости вращения вала, из контроллера 610 или опубликованной метки. Регулятор 666 частоты выполнен с возможностью оценки точного времени, в течение которого аналоговое устройство 664 для регистрации считывает эти значения. Регулятор 666 частоты сохраняет среднее время цикла между считываниями значений, полученных для датчика 22 скорости вращения вала от контроллера 610 на протяжении предопределенного количества циклов. В одном варианте осуществления регулятор 666 частоты сохраняет среднее время цикла между считываниями значений, полученных для датчика 22 скорости вращения вала от контроллера 610 или публикатора на протяжении последних двадцати циклов.
Если среднее значение смещено на предопределенную величину относительно предопределенного интервала, то применяется корректировка. Например, если среднее значение больше, чем предопределенный интервал плюс предопределенная величина, то регулятор 666 частоты ускоряет на величину корректировки следующее запланированное время для считывания значений аналоговым устройством 664 для регистрации; если среднее значение меньше, чем предопределенный интервал минус предопределенная величина, то регулятор 666 частоты задерживает на величину корректировки следующее запланированное время для считывания значений аналоговым устройством 664 для регистрации.
В одном варианте осуществления предопределенный интервал составляет 100 миллисекунд, предопределенная величина составляет 5 миллисекунд и величина корректировки составляет 1 миллисекунду. В этом варианте осуществления, если среднее значение превышает 105 миллисекунд, аналоговое устройство 664 для регистрации ускоряет считывание значений на 1 миллисекунду, и если среднее значение меньше 95 миллисекунд, аналоговое устройство 664 для регистрации задерживает считывание значений на 1 миллисекунду. В вариантах осуществления ускорение и задержка считывания значений аналоговым устройством 664 для регистрации ограничена диапазоном от 80 миллисекунд до 120 миллисекунд.
В зависимости от конфигурации системы 600 управления HSR 660 использует блок 667 косвенного определения времени или блок 668 непосредственного смещения по времени для сохранения виртуальной оси времени. Если доступны значения даты и времени для контроллера 610, может использоваться блок 668 непосредственного смещения по времени. Если значения даты и времени для контроллера 610 недоступны, может использоваться блок 667 косвенного определения времени.
Блок 667 косвенного определения времени полагается на предопределенный интервал, который публикатор 630 использует для обновления временной отметки метки. Блок 667 косвенного определения времени выполняет цикл синхронизации при запуске HSR 660 и затем с регулярными интервалами, например каждый час. Цикл синхронизации блока 667 косвенного определения времени включает считывание временной отметки метки со сравнительно большой частотой, например каждые 20 миллисекунд. Если временная отметка метки изменилась, блок 667 косвенного определения времени устанавливает флаг, который позволяет считывать временную отметку метки и присваивать текущее время виртуальной оси времени HSR 660 в пределах последующего цикла регулярного интервала. Когда временную отметку метки присваивают текущему времени виртуальной оси времени, блок косвенного определения времени компенсирует задержку, вызванную ожиданием считывания следующим циклом временной отметки метки и присвоения ее текущему времени виртуальной оси времени.
Блок 668 непосредственного смещения по времени присваивает текущее значение виртуальной оси времени в качестве времени контроллера плюс временной интервал. В некоторых вариантах осуществления это время контроллера хранится в том же аналоговом массиве со значениями датчиков. Полное считывание значений датчика из контроллера 610 аналоговым устройством 664 для регистрации может быть разделено на несколько вспомогательных пакетов из-за ограничений размера пакетов передачи данных между контроллером 610 и HMI 650. Временной интервал может быть определен по формуле:
где  является временным интервалом (который может иметь отрицательное значение),
является временным интервалом (который может иметь отрицательное значение),  является временем ответа на считывание из последнего пакета,
является временем ответа на считывание из последнего пакета,  является временем запроса на считывание из первого пакета, n обозначает индекс вспомогательного пакета, который содержит дату и время контроллера, и N обозначает количество вспомогательных пакетов, которые составляют полный массив. В некоторых вариантах осуществления, когда абсолютное значение временного интервала меньше заданного порогового значения, он не будет суммироваться со временем контроллера. В некоторых вариантах осуществления это заданное пороговое значение составляет 10 мс.
является временем запроса на считывание из первого пакета, n обозначает индекс вспомогательного пакета, который содержит дату и время контроллера, и N обозначает количество вспомогательных пакетов, которые составляют полный массив. В некоторых вариантах осуществления, когда абсолютное значение временного интервала меньше заданного порогового значения, он не будет суммироваться со временем контроллера. В некоторых вариантах осуществления это заданное пороговое значение составляет 10 мс.
Система 600 управления также может содержать хранилище 655 данных HMI. Хранилище 655 данных HMI может использоваться HMI 650 и его различными процессами для хранения, помимо прочего, данных, считанных из контроллера 610, и для хранения виртуальной оси времени.
Промышленная применимость
Газотурбинные двигатели могут подходить для различных промышленных применений, например, различных аспектов нефтегазовой отрасли (включающих передачу, сбор, хранение, извлечение и подъем нефти и природного газа), энергетической промышленности, отрасли производства электрической и тепловой энергии, аэрокосмической отрасли и других транспортных отраслей.
Из-за ограничений хранения данных электронные системы получения данных турбинного двигателя могут не иметь возможности непрерывной регистрации данных о скорости вращения ротора компрессора с высокой частотой оборотов в течении срока службы газотурбинного двигателя 100. Однако данные о скорости вращения ротора компрессора с высокой частотой оборотов могут быть полезны для сбора кратковременных отклонений скорости вращения, которые могут происходить во время рабочих событий газотурбинного двигателя 100, таких как периоды холостого хода. Обычно NGP газотурбинного двигателя 100 управляют таким образом, чтобы она оставалась выше 94% максимальной проектной скорости вращения для ограничения выбросов и ниже 100% максимальной проектной скорости вращения для предотвращения структурного разрушения ротора компрессора. Возможность регистрации данных для идентификации характеристик события превышения допустимой скорости вращения может предоставить полезную информацию для устранения факторов, которые могли привести к структурному разрушению компонента газовой турбины. Например, для устранения разрушения, вызванного модальным воздействием. Структурное повреждение и разрушение может происходить из-за достижения максимальной величины NGP, из-за работы в течение длительных периодов со скоростью вращения выше конкретной NGP и из-за количества случаев, когда NGP превышала конкретное пороговое значение NGP.
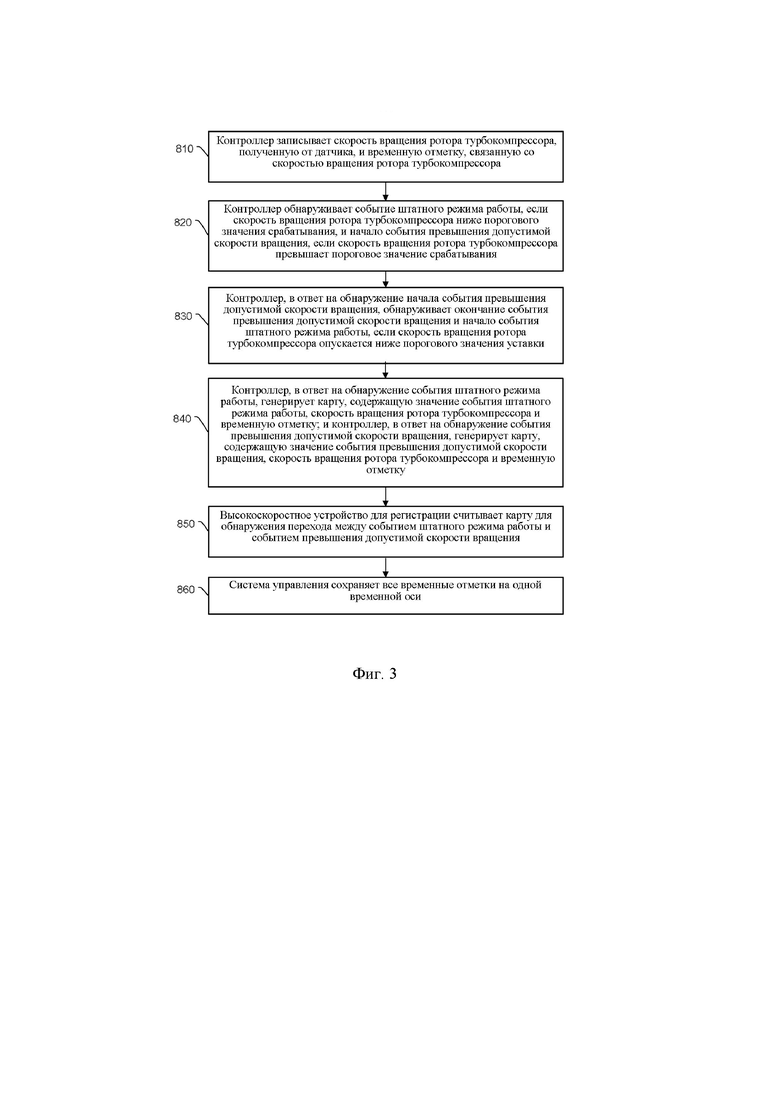
На фиг. 3 представлена блок-схема способа регистрирования информации, относящейся к событию превышения допустимой скорости вращения ротора турбокомпрессора газотурбинного двигателя с системой управления по фиг. 1 и 2. Способ начинается с блока 810 и включает записывание контроллером 610 скорости вращения ротора турбокомпрессора, полученной от датчика, и временной отметки, связанной со скоростью вращения ротора турбокомпрессора на основании часов 640 контроллера. Блок 810 может включать опрашивание контроллером 610 о скорости вращения ротора турбокомпрессора датчика 22, соединенного с газотурбинным двигателем 100, с предопределенным интервалом опрашивания датчика.
Блок 820 включает обнаружение контроллером события штатного режима работы, если скорость вращения ротора турбокомпрессора ниже порогового значения срабатывания, и начала события превышения допустимой скорости вращения, если скорость вращения ротора турбокомпрессора превышает пороговое значение срабатывания. В одном варианте осуществления есть несколько уровней событий превышения допустимой скорости вращения и контроллер может обнаруживать начало каждого уровня превышения допустимой скорости вращения. Например, контроллер может обнаруживать событие штатного режима работы, если скорость вращения ротора турбокомпрессора ниже порогового значения срабатывания, начало события превышения допустимой скорости вращения первого уровня, если скорость вращения ротора турбокомпрессора превышает пороговое значение срабатывания первого уровня, начало события превышения допустимой скорости вращения второго уровня, если скорость вращения ротора турбокомпрессора превышает пороговое значение срабатывания второго уровня, и начало события превышения допустимой скорости вращения третьего уровня, если скорость вращения ротора турбокомпрессора превышает пороговое значение срабатывания третьего уровня.
Блок 820 может включать записывание публикатором 630 контроллера 610 массива значений NGP, полученных от датчика 22 скорости вращения вала, и возникновение каждого события. Блок 820 может включать записывание значений датчика 22 скорости вращения вала в аналоговый массив. Блок 820 также может включать записывание каждого события в массив событий, что может включать записывание уникального идентификатора и временной отметки события. Временная отметка события может представлять собой время согласно часам 640 контроллера, когда произошло событие.
Блок 830 включает обнаружение контроллером 610, в ответ на обнаружение начала события превышения допустимой скорости вращения, окончания события превышения допустимой скорости вращения и начало события штатного режима работы, если скорость вращения ротора турбокомпрессора опускается ниже порогового значения уставки. В одном варианте осуществления есть несколько уровней события превышения допустимой скорости вращения и контроллер 610 может обнаруживать окончание каждого уровня события превышения допустимой скорости вращения. Например, контроллер 610, в ответ на обнаружение начала события превышения допустимой скорости вращения первого уровня, обнаруживает окончание события превышения допустимой скорости вращения первого уровня, если скорость вращения ротора турбокомпрессора меньше порогового значения уставки первого уровня; контроллер 610, в ответ на обнаружение начала события превышения допустимой скорости вращения второго уровня, обнаруживает окончание события превышения допустимой скорости вращения второго уровня, если скорость вращения ротора турбокомпрессора меньше порогового значения уставки второго уровня; и контроллер 610, в ответ на обнаружение начала события превышения допустимой скорости вращения третьего уровня, обнаруживает окончание события превышения допустимой скорости вращения третьего уровня, если скорость вращения ротора турбокомпрессора меньше порогового значения уставки третьего уровня.
Блок 840 включает генерирование контроллером 610, в ответ на обнаружение события штатного режима работы, метки, содержащей значение события штатного режима работы, скорость вращения ротора турбокомпрессора и временную отметку; и генерирование контроллером 610, в ответ на обнаружение события превышения допустимой скорости вращения, метки, содержащей значение события превышения допустимой скорости вращения, скорость вращения ротора турбокомпрессора и временную отметку.
В одном варианте осуществления есть несколько уровней события превышения допустимой скорости вращения и контроллер 610 может генерировать метки на основании каждого уровня события превышения допустимой скорости вращения. Например, контроллер 610, в ответ на обнаружение события превышения допустимой скорости вращения первого уровня, генерирует метку, содержащую значение события превышения допустимой скорости вращения первого уровня, скорость вращения ротора турбокомпрессора и временную отметку. Контроллер 610, в ответ на обнаружение события превышения допустимой скорости вращения второго уровня, генерирует метку, содержащую значение превышения допустимой скорости вращения первого уровня, значение события превышения допустимой скорости вращения второго уровня, скорость вращения ротора турбокомпрессора и временную отметку. Контроллер 610, в ответ на обнаружение события превышения допустимой скорости вращения третьего уровня, генерирует метку, содержащую значение превышения допустимой скорости вращения первого уровня, значение превышения допустимой скорости вращения второго уровня, значение события превышения допустимой скорости вращения третьего уровня, скорость вращения ротора турбокомпрессора и временную отметку.
Блок 840 может включать публикацию публикатором 630 метки события, которое произошло в пределах последнего временного диапазона предопределенного интервала публикации метки. Публикация метки события может включать обновление реестра, чтобы добавить событие, которое произошло в пределах последнего временного диапазона интервала публикации метки. Опубликованная метка может содержать временную отметку метки, то есть время на часах 640 контроллера, когда была опубликована метка, и записанную информацию, такую как уникальный идентификатор, значение датчика и смещение, для события, которое произошло в пределах последнего временного диапазона. Смещение может представлять собой разницу во времени между временной отметкой события и временной отметкой метки.
Блок 850 включает считывание высокоскоростным устройством 660 для регистрации метки для обнаружения перехода между событием штатного режима работы и событием превышения допустимой скорости вращения. В одном варианте осуществления есть несколько уровней события превышения допустимой скорости вращения и высокоскоростное устройство 660 для регистрации может считывать метку для обнаружения перехода между событием штатного режима работы, событием превышения допустимой скорости вращения первого уровня, событием превышения допустимой скорости вращения второго уровня и событием превышения допустимой скорости вращения третьего уровня.
Блок 850 может включать выполняемое HSR 660 считывание метки после ее публикации и считывание значений, полученных от датчика скорости вращения вала, из контроллера 610. Блок 850 может включать проверку метки устройством 662 для регистрации событий с предопределенным интервалом считывания метки для обнаружения, содержит ли метка значение события превышения допустимой скорости вращения. При этом предопределенный интервал считывания метки имеет более высокую частоту, чем предопределенный интервал публикации метки. Блок 850 также может включать установку флага устройством 662 для регистрации событий, когда метка содержит значение события превышения допустимой скорости вращения, и регистрацию всей метки. Блок 850 также может включать считывание аналоговым устройством 664 для регистрации значений, полученных для каждого датчика, из контроллера 610 или метки с предопределенным интервалом считывания датчика или интервалом считывания метки соответственно. Интервал считывания датчика может быть равен интервалу считывания метки.
При выполняемом HSR 660 считывании данных из контроллера 610 может происходить искажение информации. Путем проверки метки с относительно высокой частотой по сравнению с интервалом публикации метки и считывания метки только когда заголовок метки был изменен, устройство 662 для регистрации событий обеспечивает считывание метки только после ее полного обновления, но задолго до следующего изменения метки, что может предотвратить искажение данных.
Блок 860 включает, в ответ на обнаружение события превышения допустимой скорости вращения, регистрацию высокоскоростным устройством 660 для регистрации нескольких меток, содержащих значение события превышения допустимой скорости вращения, скорость вращения ротора турбокомпрессора, временную отметку, от начала события превышения допустимой скорости вращения до окончания события превышения допустимой скорости вращения. В одном варианте осуществления есть несколько уровней события превышения допустимой скорости вращения и высокоскоростное устройство для регистрации может, в ответ на обнаружение события превышения допустимой скорости вращения первого уровня, регистрировать несколько меток, содержащих значение события превышения допустимой скорости вращения первого уровня, значение события превышения допустимой скорости вращения второго уровня, значение события превышения допустимой скорости вращения третьего уровня, скорость вращения ротора турбокомпрессора и временную отметку.
Способ также может включать сохранение системой 600 управления всех временных отметок на одной временной оси. Способ может включать присвоение аналоговым устройством 664 для регистрации временной отметки датчика относительно виртуальной оси времени каждому значению датчиков, полученному от контроллера 610. Временная отметка датчика может быть присвоена путем вычитания из времени на виртуальной оси времени, когда значения были получены аналоговым устройством 664 для регистрации, половины разницы между временем на виртуальной оси времени, когда значения были получены аналоговым устройством 664 для регистрации, и временем на виртуальной оси времени, когда запрос на считывание значений был отправлен аналоговым устройством 664 для регистрации.
Способ может включать корректировку предопределенного интервала считывания датчика регулятором 666 частоты с учетом задержек операционной системы HMI 650. Корректировка предопределенного интервала считывания датчика может включать сохранение среднего времени цикла между считыванием значений датчиков за предопределенное количество циклов, увеличение фактического предопределенного интервала считывания датчика на величину корректировки, если среднее значение ниже требуемого интервала считывания датчика на предопределенную величину, и уменьшение фактического предопределенного интервала считывания датчика на величину корректировки, если среднее значение выше требуемого интервала считывания датчика.
Способ также может включать присвоение блоком 668 непосредственного смещения по времени текущего значения виртуальной оси времени в качестве времени на часах 640 контроллера плюс интервал считывания пакетов, когда доступны значения даты и времени для часов 640 контроллера. Интервал считывания пакетов может представлять собой разницу между временем ответа на считывание последнего пакета и временем запроса на считывание первого пакета, умноженную на разницу половины результата деления индекса вспомогательного пакета, который содержит дату и время часов 640 контроллера, на количество вспомогательных пакетов, которые составляют полный массив. Этот интервал может иметь отрицательное значение. В некоторых вариантах осуществления, когда абсолютное значение этого интервала меньше заданного порогового значения, он не будет суммироваться со временем контроллера. В некоторых вариантах осуществления это пороговое значение равно половине времени цикла контроллера 610.
Способ может дополнительно включать выполнение цикла синхронизации блоком 667 косвенного определения времени при запуске HSR 660 и после этого с интервалом синхронизации с публикатором 630 для создания виртуальной оси времени и присвоение временной отметки метки публикатором 630 текущему времени на виртуальной оси времени путем компенсации задержки, вызванной ожиданием следующего цикла для считывания временной отметки метки, когда дата и время часов 640 контроллера недоступны.
Способ также может включать получение данных с временной отметкой, связанных с датчиком и событиями, системой 700 контроля для контроля газотурбинного двигателя 100, для выполнения диагностики газотурбинного двигателя 100, для предупреждения технических специалистов и потребителей о возникновении определенных событий и для рекомендации технического обслуживания газотурбинного двигателя. Диагностика может быть проведена техническим специалистом, который анализирует данные для определения, какое техническое обслуживание газотурбинного двигателя 100 необходимо выполнить, если оно необходимо. Осуществление контроля и диагностики газотурбинного двигателя 100 может включать предоставление исходных данных, различной статистики и предупреждений техническим специалистам или потребителям по сети. Диагностика также может выполняться системой 700 контроля или соответствующими удаленными системами, которые могут использовать аналитику для выполнения контроля и диагностики газотурбинного двигателя 100. В некоторых вариантах осуществления данные, полученные контроллером 610, считываются HSR 660 и записываются в виде наборов. Эти наборы могут быть получены системой 700 контроля. Как в некоторых других вариантах осуществления, HSR 660 может работать в других устройствах, присоединенных к контроллеру. Другие системы контроля также могут получать указанные наборы.
Как описано выше, HSR 660 может сохранять виртуальную ось времени, которая сохраняет все данные, полученные HSR 660, на оси времени относительно часов 640 контроллера 610 и на синхронизированной виртуальной оси времени, когда часы 640 контроллера 610 недоступны. Сохранение виртуальной оси времени может предотвратить противоречия при создании временных отметок и может устранить необходимость выполнения техническим специалистом трудоемкого анализа изменений цифровых состояний и рассмотрения событий в различных реестрах событий.
Специалистам в данной области техники будет очевидно, что различные иллюстративные логические блоки и этапы алгоритма, описанные в сочетании с вариантами осуществления, раскрытыми в настоящем документе, могут быть реализованы в виде электронного аппаратного обеспечения, компьютерного программного обеспечения, программных модулей или их комбинаций. Чтобы явно отобразить такую взаимозаменяемость аппаратного обеспечения и программного обеспечения, различные иллюстративные компоненты, блоки и этапы были описаны выше в общих чертах в отношении их функциональных возможностей. Реализация таких функциональных возможностей в виде аппаратного обеспечения или программного обеспечения зависит от проектных ограничений, накладываемых на систему в целом. Специалисты в данной области техники могут реализовать описанные функциональные возможности различными способами для каждого конкретного применения, но такие решения по реализации не должны быть истолкованы как вызывающие отклонение от объема настоящего изобретения. Кроме этого, группировка функций в пределах одного блока или этапа предназначена для простоты описания. Конкретные функции или этапы можно переместить из одного блока без отступления от объема настоящего изобретения.
Различные иллюстративные логические блоки, описанные в сочетании с вариантами осуществления, раскрытыми в настоящем документе, могут быть реализованы или выполнены процессором общего назначения, цифровым сигнальным процессором (DSP), специализированной интегральной схемой (ASIC), программируемой пользователем вентильной матрицей (FPGA) или другими программируемыми логическими устройствами, логическим элементом на дискретных компонентах или транзисторах, дискретными аппаратными компонентами или любой их комбинацией, предназначенной для выполнения функций, описанных в настоящем документе. Процессор общего назначения может представлять собой микропроцессор, но в альтернативном варианте процессор может представлять собой любой процессор, контроллер или микроконтроллер. Процессор также может быть реализован в виде комбинации вычислительных устройств, например комбинации DSP и микропроцессора, множества микропроцессоров, одного или более микропроцессоров в сочетании с ядром DSP или любой другой подобной конфигурации.
Этапы способа или алгоритма, описанные в сочетании с вариантами осуществления, раскрытыми в настоящем документе, могут быть реализованы непосредственно в аппаратном обеспечении, в программном обеспечении, выполняемом процессором (например процессором компьютера), или в комбинации двух перечисленных вариантов. Программное обеспечение может храниться в оперативном запоминающем устройстве (RAM), флеш-памяти, постоянном запоминающем устройстве (ROM), электрически программируемом постоянном запоминающем устройстве (EPROM), электрически стираемом программируемом постоянном запоминающем устройстве (EEPROM), реестрах, на жестком диске, съемном диске, CD-ROM или любой другой форме носителя данных. Иллюстративный носитель данных может быть присоединен к процессору, так что процессор может считывать информацию с носителя данных и записывать информацию на него. В альтернативном варианте носитель данных может быть неотъемлемой частью процессора. Процессор и носитель данных могут находиться в ASIC.
Предыдущее описание раскрытых вариантов осуществления предоставлено для того, чтобы позволить любому специалисту в данной области изготовить или использовать настоящее изобретение. Различные модификации этих вариантов осуществления будут очевидны специалистам в данной области, и общие принципы, описанные в настоящем документе, могут быть применены к другим вариантам осуществления без отступления от идеи или объема изобретения. Таким образом, следует понимать, что описание и графические материалы, представленные в настоящем документе, отображают предпочтительный в настоящее время вариант осуществления изобретения и, следовательно, представляют объект, широко рассматриваемый в настоящем изобретении. Следует также понимать, что объем настоящего изобретения полностью включает в себя другие варианты осуществления, которые могут стать очевидными специалистам в данной области техники.
Из-за ограничений хранения данных электронные системы получения данных турбинного двигателя могут не иметь возможности непрерывной регистрации данных о скорости вращения ротора компрессора с высокой частотой оборотов в течение срока службы газотурбинного двигателя (100). Однако данные о скорости вращения ротора компрессора с высокой частотой оборотов могут быть полезны для сбора кратковременных отклонений скорости вращения, которые могут происходить во время рабочих событий газотурбинного двигателя (100), таких как периоды холостого хода. Раскрыта система (600) управления для газотурбинного двигателя (100). В вариантах осуществления система (600) управления содержит контроллер (610) и высокоскоростное устройство (660) для регистрации. Контроллер (610) получает значение датчика от датчика (22), соединенного с газотурбинным двигателем (100), и публикует метку, которая содержит тип события, значение датчика и временную отметку. Высокоскоростное устройство (660) для регистрации проверяет метку на предмет события превышения допустимой скорости вращения. Если обнаружено событие превышения допустимой скорости вращения, высокоскоростное устройство (660) для регистрации регистрирует значения, предоставленные меткой. 6 з.п. ф-лы, 3 ил.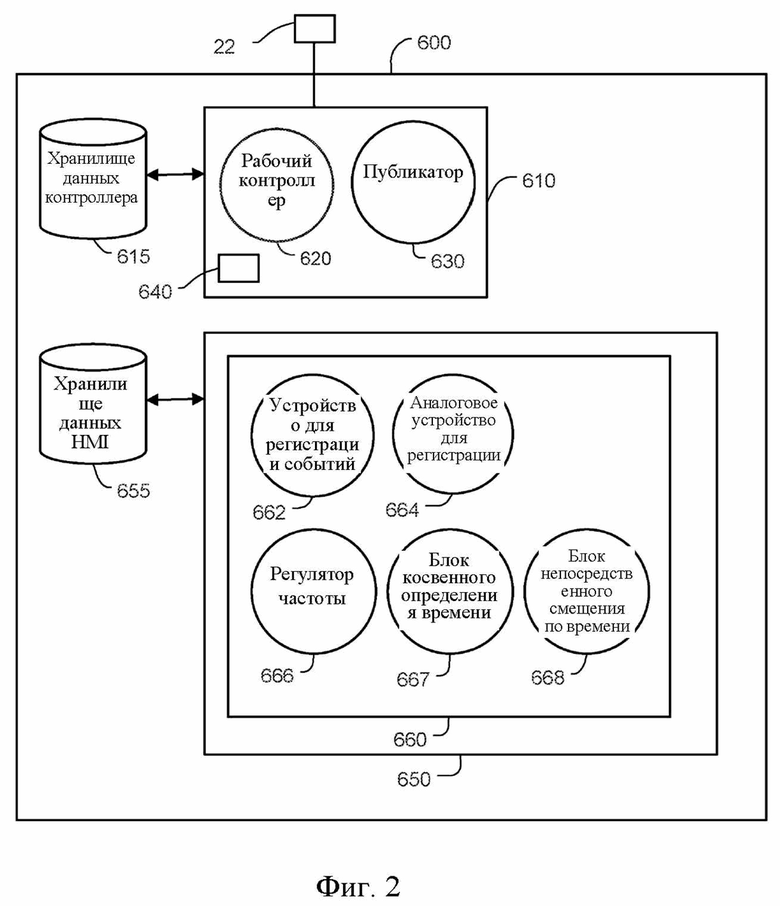
1. Способ контроля газотурбинного двигателя (100), причем способ включает:
записывание скорости вращения ротора турбокомпрессора, полученной от датчика (22), и временной отметки, связанной со скоростью вращения ротора турбокомпрессора;
обнаружение начала события превышения допустимой скорости вращения, если скорость вращения ротора турбокомпрессора превышает пороговое значение срабатывания;
обнаружение в ответ на обнаружение начала события превышения допустимой скорости вращения окончания события превышения допустимой скорости вращения, если скорость вращения ротора турбокомпрессора опускается ниже порогового значения уставки;
генерирование в ответ на обнаружение события превышения допустимой скорости вращения метки, которая содержит значение события превышения допустимой скорости вращения, скорость вращения ротора турбокомпрессора и временную отметку;
считывание метки для обнаружения события превышения допустимой скорости вращения; и
регистрирование в ответ на обнаружение события превышения допустимой скорости вращения множества меток, содержащих значение события превышения допустимой скорости вращения, скорость вращения ротора турбокомпрессора, временную отметку, от начала события превышения допустимой скорости вращения до окончания события превышения допустимой скорости вращения.
2. Способ по п. 1, отличающийся тем, что способ дополнительно включает, в ответ на обнаружение окончания события превышения допустимой скорости вращения, регистрирование множества меток, содержащих скорость вращения ротора турбокомпрессора и временную отметку, в общем на протяжении пятнадцати минут после события превышения допустимой скорости вращения.
3. Способ по п. 2, отличающийся тем, что способ дополнительно включает временное хранение множества меток, содержащих скорость вращения ротора турбокомпрессора и временную отметку метки, и, в ответ на начало события превышения допустимой скорости вращения, регистрирование скорости вращения ротора турбокомпрессора и временной отметки в общем с одной минуты до начала события превышения допустимой скорости вращения.
4. Способ по п. 1, отличающийся тем, что способ дополнительно включает пошаговое увеличение счета на единицу за каждое событие превышения допустимой скорости вращения, зарегистрированное во время работы газотурбинного двигателя (100).
5. Способ по п. 1, отличающийся тем, что способ дополнительно включает определение суммарной длительности событий превышения допустимой скорости вращения путем суммирования разницы между временной отметкой начала события превышения допустимой скорости вращения и временной отметкой окончания события превышения допустимой скорости вращения каждого события превышения допустимой скорости вращения, зарегистрированного во время работы газотурбинного двигателя (100).
6. Способ по п. 1, отличающийся тем, что способ дополнительно включает регистрирование максимальной скорости вращения ротора турбокомпрессора между началом события превышения допустимой скорости вращения и окончанием события превышения допустимой скорости вращения.
7. Способ по п. 1, отличающийся тем, что пороговое значение уставки в общем на 0,5% меньше порогового значения срабатывания.
| US 2016348532 A1, 01.12.2016 | |||
| US 2017038275 A1, 09.02.2017 | |||
| US 2017037742 A1, 09.02.2017 | |||
| СПОСОБ ОБРАБОТКИ И РАЗГЛИНИЗАЦИИ ПРИЗАБОЙНОЙ ЗОНЫ ЭКСПЛУАТАЦИОННЫХ СКВАЖИН | 2000 |
|
RU2172824C1 |
| US 4954974 A, 04.09.1990 | |||
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ВЕРТОЛЕТА | 2009 |
|
RU2391261C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2376487C2 |
